國
立
交
通
大
學
電控工程研究所
碩
士
論
文
單組反流器供電之雙五相永磁同步馬達控制
Single-Inverter-Fed Control for two Five-Phase PMSMs
研 究 生:蘇 崇 賢
指 導 教 授:陳 鴻 祺 博士
單組反流器供電之雙五相永磁同步馬達控制
Single-Inverter-Fed Control for two Five-Phase PMSMs
研 究 生:蘇崇賢 Student:Chong-Xian Su
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering
Sep. 2010
Hsinchu, Taiwan, Republic of China
單組反流器供電之雙五相永磁同步馬達控制
研究生:蘇崇賢
指導教授:陳鴻祺 博士
國立交通大學電控工程研究所
摘要
本論文以 FPGA (Field Programmable Gate Array;)為控制器,實現雙五相馬達獨立 控制。首先探討五相馬達的電路模型,接著討論相序對馬達造成的影響,並依照其結果 延伸設計,架構出線圈為串接型式的雙五相馬達系統。在雙五相馬達系統中,藉由控制 器調整反流器的輸出電流,使電流為兩組相序交錯的組合,並藉此達成兩顆馬達彼此獨 立的控制。由於串接系統中,控制器回授的訊號會受到馬達上的擾動影響,利用 PI 控 制器對於弦波的追隨,會有不小的穩態誤差情形。因此在控制器的部份再做設計,使用 前饋控制器將擾動縮減,並藉此提升追隨情形。最後利用實作來驗證不同相序的成分彼 此間互相作用的狀態,以及不同情況下控制架構的追隨情形。
Single-Inverter-Fed Control for two Five-Phase PMSMs
Student:Chong-Xian Su Advisor:Hung-Chi Chen
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
This thesis implements independent control strategy of two-five-phase motor by FPGA. From the characteristic of five-phase motor, we can know how sequences affect motor, moreover design dual motor system. In this system, we control two motors independently by adjust the controller to affect the output current sequence of voltage source inverter. Inside this system, there are a lot of disturbances which greatly affects controller operation, so we design feed-forward controller to decrease the disturbance to improve system tracing. Finally, there are some experimental results shows how sequences make motor system independent control and how control system work here.
誌謝
首先我要感謝我的指導教授陳鴻祺博士,在本文創立的時候給予我的教誨,一路上 細心的帶領使本論文得以順利完成。在老師的指導下,除了讓我在這個領域有長足的進 步外,也更深刻的體會自己的不足,需要多方的學習與調整,在此對老師致上由衷的感 謝。此外,感謝口試委員張鈺炯博士以及胡竹生博士,對論文的方向以及發展給予許多 的指教以及寶貴的意見。 在這兩年的研究生涯中,在實驗室認識了許多的朋友,在朝夕相處切磋琢磨之間, 使我在各方面都有進步,並且了解合作的真諦。感謝志杰、任浩、庠澤、暐舜以及育慶 學長對我的提攜,與你們相處的時光是快樂的。感謝振宇、子安以及智豪同學,在課業 上相互的砥礪。此外感謝宏和、威諭以及修哲學弟,讓我在最後一年中的生活,還是充 滿各型各色的樂趣,沒有你們,研究的生涯是單調而苦悶的。最後感謝我的父母,給予 我經濟以及精神上的依靠,使我能夠專心的在學業上努力。感謝在一路上陪伴著我的各 位,在各方面對我的支持,使我成長,謝謝你們。目錄
中文摘要 ...II 英文摘要 ... III 誌謝 ... IV 目錄 ... V 圖目錄 ... VIII 表目錄 ... XI 第一章 緒論 ...1 1.1 研究背景與發展現況 ... 1 1.2 文獻回顧 ... 2 1.3 研究目的 ... 3 1.4 本文架構 ... 4 第二章 五相馬達模型與控制 ...5 2.1 五相馬達簡介 ... 5 2.1.1 編碼器元件 ... 7 2.1.2 五相馬達模型 ... 8 2.2 五相馬達相序 ... 9 2.2.1 理想感應電動勢 ... 9 2.2.2 實際感應電動勢波形與馬達扭矩 ... 11 2.3 五相馬達驅動模型 ... 13 2.3.1 五相反流器模型 ... 13 2.4 五相馬達控制架構 ... 19 第三章 雙五相馬達接線與控制 ...20 3.1 五相平衡相序 ... 20 3.1.1 馬達扭矩 ... 23 3.2 馬達連線 ... 24 3.3 雙五相馬達驅動模型 ... 28 3.3.1 雙五相馬達系統驅動組態 ... 28 3.3.2 雙馬達系統下單相線圈電氣方程式 ... 293.3.3 雙馬達系統下馬達機械模型 ... 31 3.4 雙五相馬達控制架構 ... 33 第四章 電流控制器設計 ...35 4.1 馬達單相模型與反流器單相模型 ... 35 4.2 所提電流控制架構 ... 37 4.2.1 電流命令前饋迴路 ... 38 4.2.2 擾動前饋控制迴路 ... 41 4.2.3 等效擾動前饋控制 ... 43 4.3 控制架構模擬 ... 47 4.3.1 馬達參數及感應電動勢頻譜 ... 47 4.3.2 模擬狀況及模擬架構 ... 49 4.4 模擬結果 ... 53 第五章 實作電路與結果 ...56 5.1 現場可規劃邏輯閘陣列(FPGA) ... 56 5.2 馬達參數測量 ... 57 5.2.1 馬達電阻測量 ... 57 5.2.2 馬達電感測量 ... 59 5.2.3 馬達感應電動勢測量 ... 61 5.3 實作電路 ... 65 5.3.1 開關驅動電路 ... 68 5.3.2 編碼器轉換電路 ... 69 5.3.3 數位類比轉換電路(DAC、ADC)... 70 5.4 控制架構實作 ... 71 5.4.1 模擬與實作對照 ... 71 5.4.2 電流回授控制實作 ... 72 5.4.3 電流前饋控制實作 ... 74 5.4.4 擾動前饋控制實作 ... 76 5.5 單馬達系統實作波形 ... 79 5.5.1 穩態運作波形 ... 79
5.5.2 轉速變化實作波形 ... 81 5.5.3 負載切換實作 ... 81 5.6 雙馬達實作波形 ... 83 5.6.1 穩態運作波形 ... 83 5.6.2 轉速變化運作波形 ... 86 第六章 結論 ...87 參考文獻 ...88
圖目錄
圖 2.1 五相馬達工作原理 ...6 圖 2.2 光編碼器示意圖 ...7 圖 2.3 五相線圈圖 ...8 圖 2.4 理想狀況下馬達感應電動勢波形 ...9 圖 2.5 改變轉向之理想感應電動勢波形 ...10 圖 2.6 五相馬達驅動電路組態 ...13 圖 2.7 開關訊號示意圖 ...14 圖 2.8 開關與馬達驅動電路組態 ...15 圖 2.9 馬達模型方塊圖 ...16 圖 2.10 電流控制等效方塊圖 ...17 圖 2.11 馬達轉速與扭矩方塊圖 ...18 圖 2.12 速度控制方塊圖 ...18 圖 2.13 五相永磁同步馬達速度控制 ...19 圖 3.1 相隔72°的感應電動勢波形 ...20 圖 3.2 相隔144 的感應電動勢波形... 21 ° 圖 3.3 雙馬達連線模型 ...24 圖 3.4 雙五相馬達驅動電路 ...28 圖 3.5 雙馬達系統下單組馬達線圈模型 ...29 圖 3.6 電流控制等效方塊圖 ...30 圖 3.7 雙馬達系統下單顆馬達機械模型 ...31 圖 3.8 速度控制方塊 ...32 圖 3.9 雙五相永磁同步馬達速度控制架構圖 ...34 圖 4.1 電流控制等效方塊圖 ...35 圖 4.2 改善的電流架構圖 ...37 圖 4.3 前饋電流控制等效方塊圖(理想狀況) ...38 圖 4.4 擾動前饋控制迴路 ...42 圖 4.5 擾動前饋控制迴路 ...43 圖 4.6 擾動前饋控制等效迴路 ...45 圖 4.7 感應電動勢頻譜成份 ...47 (a)實作測量 (b)模擬 ... 47 圖 4.8 感應電動勢模擬架構圖 ...48 圖 4.9 模擬線圈架構圖 ...49 圖 4.10 模擬控制器架構圖 ...50 圖 4.11 模擬比較器架構圖 ...50 圖 4.12 模擬架構全圖 ...51 圖 4.13 電流追隨模擬圖 ...53 (a)PI 架構 (b)電流前饋架構 (c)擾動前饋架構 ... 53圖 4.14 參數誤差下電流追隨模擬圖 ...54 (a)PI 架構下理想線圈 (b)PI 架構下線圈變動 ... 54 (c)擾動前饋架構下理想線圈 (d)擾動前饋架構下線圈變動 ... 54 圖 4.15 參數誤差下電流追隨模擬圖 ...55 (a)PI 架構 (b)PI 架構下轉速變動 ... 55 (c)擾動前饋架構 (d)擾動前饋架構下轉速變動 ... 55 圖 5.1 五相馬達線圈示意圖 ...57 (a)線圈電路圖 (b)線圈穩態圖 ... 57 圖 5.2 五相馬達線圈穩態圖 ...58 (a)串聯兩組線圈 (b)串聯四組線圈 ... 58 圖 5.3 馬達電流波形 ...60 (a)五組單相線圈電流波形 (b)串接線圈電流波形 ... 60 圖 5.4 串聯線圈電路 ...60 圖 5.5 模擬電流波形對照實作波形圖 ...60 圖 5.6 馬達電路圖 ...61 (a)等效線圈電路圖 (b)等效線圈開路圖 ... 61 圖 5.7 感應電動勢與轉速對應關係 ...62 圖 5.8 感應電動勢頻率成分 ...63 (a) 示波器波形 (b) Matlab 運算波形... 63 圖 5.9 整體架構 ...65 圖 5.10 實作電路照片 ...66 圖 5.11 雙馬達系統 ...67 圖 5.12 開關驅動電路 ...68 圖 5.13 編碼器轉換電路 ...69 圖 5.14 數位類比轉換電路 ...70 (a)A/D 轉換電路 (b)D/A 轉換電路 ... 70 圖 5.15 模擬與實作對照圖 ...71 (a)PI 模擬 (b)PI 實作 (c)擾動前饋控制模擬 (d)擾動前饋控制實作... 71 圖 5.16 電流迴路模型 ...72 圖 5.17 電流回授控制圖 ...73 (a) 500rpm, (b) 1000rpm, (c) 2000rpm,命令與回授波形 ... 73 圖 5.18 電流前饋控制系統 ...74 圖 5.19 電流前饋控制 ...75 (a) 500rpm, (b) 1000rpm, (c) 2000rpm,命令與回授波形 ... 75 圖 5.20 擾動前饋等效控制系統 ...76 圖 5.21 擾動前饋控制實作 W=0.25...77 (a) 500rpm, (b) 1000rpm, (c) 2000rpm,命令與回授波形 ... 77 圖 5.22 擾動前饋控制實作 W=0.5...78
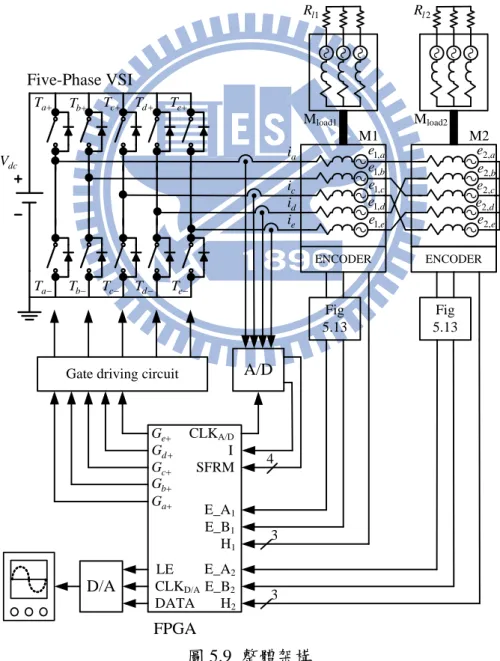
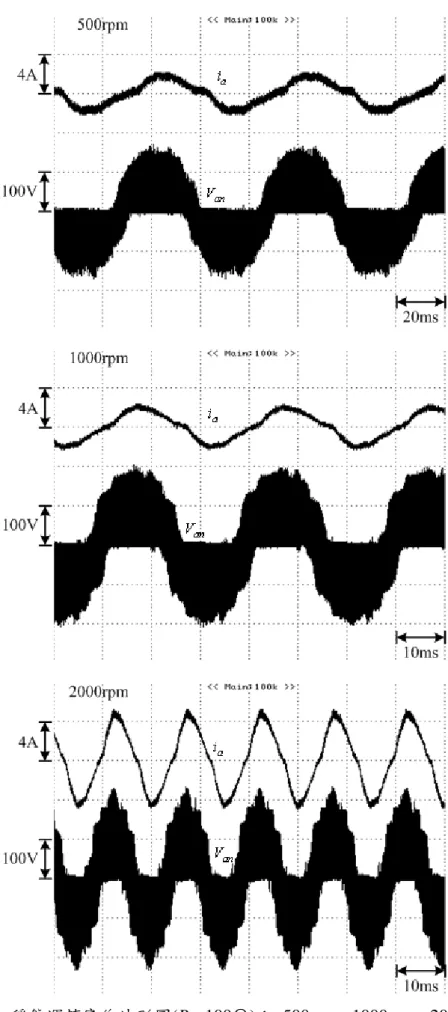
(a) 500rpm, (b) 1000rpm, (c) 2000rpm,命令與回授波形 ... 78 圖 5.23 FPGA 內部訊號波形圖 ...79 圖 5.24 穩態運轉實作波形圖(Rg=100Ω): 500 rpm, 1000 rpm, 2000 rpm ... 80 圖 5.25 轉速切換實作 500 rpm 至 2000 rpm (Rg=100Ω)... 81 圖 5.26 負載切換實作波形 ...82 圖 5.27 雙馬達系統下的 FPGA 內部訊號圖 ...83 圖 5.28 M1 與 M2 共同運作圖 ...84 圖 5.29 雙馬達系統轉向變動對應電流圖 ...85 (a)M1 運作於順時針方向 (b)M1 運作於逆時針方向 ... 85 圖 5.30 雙馬達系統暫態圖 ...86 (a)轉速命令切換 (b)負載切換 ... 86
表目錄
表 5.1:FPGA 使用率 ...56 表 5.2:1 安培電流所測得之電壓電阻表 ...58 表 5.3:頻率與峰值對照表 ...64
第一章
緒論
1.1 研究背景與發展現況
隨著工業的快速發展,馬達廣泛的被應用於產業自動化與電腦相關產品。直流馬達 的優點是控制容易,只要改變電樞電壓就可達到變速的目的,最早為工業界運用於各類 機械負載驅動器。然而,傳統直流有刷馬達的電樞位於轉子,必須使用換向片與定子的 碳刷接觸,當馬達旋轉時兩者摩擦容易產生火花,使得傳統直流有刷馬達不適用於多 塵、易爆的特殊場合。而且碳刷必須經常維護,降低了直流有刷馬達的可靠度,直流無 刷馬達的出現以電子式換相取代碳刷與換向片,改進了這方面的問題。因此直流無刷馬 達由於構造簡單、堅固、體積小和免維護等優點,亦擁有相當於直流有刷馬達的性能, 更因為轉子為磁性材料、轉動慣量小、不需激磁電流,可減少轉子功率損失,提昇運轉 效能,目前已被廣泛應用在精密機械、電腦週邊及消費性電子產品等裝置中。 由於電力電子技術的發展以及微處理晶片的演進,更高相數的反流器技術實現相對 的容易,馬達的相數不再侷限於三相。近年來,關於更高相數的馬達系統,也有著廣泛 而熱烈的研究[1]。相較於更高相數的馬達,三相馬達有著較大的頓轉轉矩,影響馬達運 轉時的噪音以及振動。在同樣的額定功率下,由於三相馬達的相數較少,同時每一相線 圈要承擔的電流數量較大,在高功率的應用下電路元件的規格相對有較大的限制。除此 之外,利用多相馬達的特性,在多馬達系統應用的場合中,可以減少反流器的使用數量 以及反流器的開關數量。有鑑於此,考慮到馬達應用場合、運作狀態與反流器電路規格, 若能夠使用較高相數的馬達來達到相同的控制目的,會更加符合經濟效益,故有多組多 相控制策略的提出。1.2 文獻回顧
一開始對於多相馬達的研究,主要是希望藉由相數的增加來研究與三相馬達的不同 之處。相關的研究也許可以溯源於[2],在[2]中對於馬達相數選取為五相,並比較兩種 馬達在運作狀況下,扭矩變化的程度。此外,在[3]中使用兩組三相馬達以互差 30 度方 式建構出六相系統,並與三相系統比較扭矩輸出品質。 這些研究的目的,主要著眼於增進馬達的運作效能方面,比如說減少運轉時轉子產 生的震盪、減少電流流通線圈的耗損;增加馬達相數一方面每一相承受的電流較少,另 一方面增加反流器開關切換狀態,兩者都是朝這方面改善的手段。此外,可靠度也是其 考量之ㄧ,在[4]的研究中探討線圈開路狀況下的多相系統運作狀況,假若反流器供電端 輸入的線圈有一組(或更多組)的線圈因不明的狀態而呈現開路,與三相馬達相比,多相 馬達依然可以平順的運轉。 利用三相馬達架構的多組馬達系統常見於日常生活中,若要使各組馬達分別獨立運 作,其驅動系統必須使用相應數量的反流器做控制。考慮使用多相馬達搭配多相反流器 的系統,透過接線以及控制器上的改變,可以得到不同的解決方法[5]。在多相系統的研 究中,由於多相系統有額外的自由度可以使用,實作中利用一組反流器可以操作一顆以 上的多相馬達,此概念首見於[6]。利用這個特性,改變使用的馬達相數,多組馬達系統 的驅動電路可以得到進一步的簡化。 在馬達變速控制中,可以從改變直流鏈電壓著手,但是需要增加額外的電路調整, 反流器是另一種較為簡便的方式。弦波脈寬調變(Sine-triangular Pulse Width Modulation) 為 PWM 的一種,在經過低通濾波器的電路後,輸出的波形更類似於弦波。多相反流器 的架構可以依照三相反流器作為延伸,在開關控制的部分可以用同樣的 PWM 概念達 成,本實作中反流器開關的控制方式也依照弦波脈寬調變的方式運作。1.3 研究目的
在多相馬達的文獻研究中,多相馬達的架構在較高功率的應用、開關規格、運轉噪 訊方面有比三相馬達突出的表現。另一方面,多相馬達有著更高的相數以及更多的自由 度,在串接系統中可以僅利用一組反流器做控制,[7]則有對馬達相數為偶數下的狀況做 探討。利用此種概念,可以縮減反流器的數量,其原理適用於更高相數的馬達。 運用多相馬達的特性,在多馬達系統的應用中,需要的反流器數量僅需一組,使多 組馬達的電路系統有簡化的可能性。從降低驅動器的複雜度、生產成本以及應用規格等 方面做考量,以三相馬達為主的架構較不適合。有鑒於此,在本論文中主要的目的是發 展 SPWM 架構的五相直流無刷馬達,在定子線圈串接的狀況下以適度的相序調整,藉由 單一組五相反流器輸出電源作獨立控制。在輸入的部份,需分別取得兩組馬達的光編碼 器訊號,經過程式處理後得到對應的電流命令,接著進入相序處理後輸入到五組 SPWM 得出五組開關訊號控制馬達。而這樣的架構,在後面的實作中可以看出兩顆馬達彼此的 運作是完全獨立的,意味者兩組馬達系統的功率、負載、轉速以及轉向在控制方面都不 需要一致,可以自由調整。 在一般的馬達控制系統中,多數控制器的核心是以數位訊號處理(DSP)來達成,DSP 是一種功能強大且非常快速的微處理器,其特性在於能夠即時處理數位訊號,以便為連 續的類比訊號進行測量或濾波。近幾年由於微電子技術的迅速發展,馬達控制透過特殊 應用積體電路(Application Specific Integrated Circuit, ASIC)、系統晶片(System On Chip, SOC)或可程式邏輯元件(CPLD/ FPGA),使得控制器可依系統的應用需求作特 殊規劃,提昇整體效能。故本論文針對五相馬達,發展出以 FPGA 為控制器核心並使用 硬體描述語言(Verilog HDL)來設計,將系統各個功能做模組化實現,最後與外部驅動 電路結合,設計出一套以 FPGA 晶片為基礎之五相馬達串接獨立控制系統。1.4 本文架構
本論文的內容一共分為六個章節,各章節之大綱內容概述如下: 第一章 :說明本論文的研究背景以及相關文獻回顧。 第二章 :介紹單組五相直流無刷馬達驅動電路、馬達數學模型。 第三章 :介紹本文所使用之雙五相馬達系統整體電路架構、作用原理、以及在此狀況 下之馬達數學模型。 第四章 :探討馬達控制器的選用。 第五章 :馬達參數量測以及實作結果。 第六章 :總結本論文之研究成果以及主要貢獻。 參考文獻。 附錄第二章
五相馬達模型與控制
2.1 五相馬達簡介
直流無刷馬達內部的轉子為永磁物質,欲使轉子轉動必須要從外界的磁場變化著 手,利用定子繞組線圈,以輸入電流造成電磁場的改變。直流無刷馬達工作原理可經由 觀察弦波類型直流無刷馬達之操作來了解,一個二極五相直流無刷馬達如圖 2.1(a)所 示,主要分成轉子與定子兩部分:轉子部分由一組 N、S 磁極組成,馬達定子的部分由 五組線圈構成。由於在本論文中需要使用馬達線圈兩端點的接線,中性點部份的線圈也 會使用到,馬達中性點部份的線圈沒有內藏。由於這個原因,五相馬達一共有十個端子 拉出來,線圈的部份將屬於中性點的端子以”-“號標示,而另一端接至反流器的端子以”+” 號標示。流經線圈的電流方向以打點以及打叉標示,利用打點定義為線圈上電流流出的 方向,而打叉則定義為電流流入的方向。 五相馬達上的定子線圈共有五組,相鄰的兩組在空間中呈72°分佈,欲操作馬達轉 子轉動需要改變定子線圈上的電流方向。假設定子線圈上的電流波形如理想弦波,而馬 達轉子位置θr定義如圖 2.1(a)所示,理想操作下在若要輸出最大扭矩則五相線圈的電流 波形與轉子位置的對應關係如同圖 2.1(b)所示。在此狀況下電流波形為理想弦波,五組 電流波形間最小的相位差為72°,峰值以及頻率皆相同,定義其波形為i 、a i 、b i 、c i 以d 及i 。e 圖 2.1(b)的輸入電流取其中兩組交會點,分別是馬達轉子在θr為36°以及108°時對 應的電流,在轉子位置為36°時電流在馬達的方向以及對應的線圈關係如下所示:此時ia 以及i 的值為正,此兩組線圈標示為b ”+”的部份電流由反流器流至馬達,而i 、c i 以及d ie 的值為負,此三組線圈標示為”+”的部份電流方向由馬達流至反流器。根據電流方向定 義打點以及打叉標示如圖 2.1(c)所示,從圖中可以看出五組線圈架構出的磁場以及轉子 位置的關係,在此狀況下可以產生最大扭矩。同樣的當轉子位置改變至108°度時,i 以b 及i 為正,其他三組為負,此時架構出的圖如同c 2.1(d)所示。+ a + c + b + d + e − a − c − b − d − e N S a i ib (a) (b) ° = 0 r θ r θ ° = 36 r θ ° = 108 r θ c i id ie N S + a + c + b + d + e − a − c − b − d − e ° = 36 r θ N S (d) ° = 108 r θ + a + c + b + d + e − a − c − b − d − e (c) 圖 2.1 五相馬達工作原理 藉由觀察定子磁場與轉子磁場之間電磁力作用的觀念可知:如要使馬達的輸出轉矩 最大則必須使馬達轉子產生之磁通量和輸入電流產生之電磁場保持垂直的位置,但直流 無刷馬達之轉子(磁極)位置是會隨著時間週期變化,位置資訊必須要一直更新。為了保 持轉子之順序轉動及獲得最大轉矩,一般的作法是偵測永久磁鐵轉子之磁極位置,然後 由驅動電路提供相對應之輸入電流給線圈,使其磁動勢和轉子磁極隨時保持垂直狀態, 藉由此控制方法使得馬達不停運轉。
2.1.1 編碼器元件
一般使用的馬達,其上通常會附有編碼器,經過適當的電路處理後能夠將馬達位置 資訊送出。當馬達在運轉時附於其上的編碼器會產生輸出電壓的變化,其變化分別由光 編碼器以及霍爾元件所產生,輸出的電壓皆有高低兩種位準的變化,依照元件以及電路 定義其輸出。 光編碼器為一組均勻分布的柵欄結構加上光感測器組成,其上特定位置一側有等同 柵欄寬度的光源通過,另一側有感測器接收光源,柵欄結構如同圖 2.2 所示。柵欄結構 會使加於其上的有向性光源被遮蓋或通過,使光感測器接收到的光源有變化,進而改變 光感測器的狀態,接著進一步利用邏輯電路產生不同的位準輸出。由於柵欄結構是固定 的,在沒有震盪以及轉向改變的狀況下,轉動馬達一圈可得到固定的位準轉換次數,可 以依照其次數換算馬達轉動的角度。在正常運作下感測器的波形可以類似於方波輸出, 另一組光感測器放置位置會延遲原感測器約 1/4 週期的位置,使兩者的輸出位準不會一 致,並且藉由位準順序的差異可以從中判斷馬達轉子的轉向。 霍爾元件用於偵測電流或是磁場訊號,依照其偵測的訊號方向改變輸出的位準,將 其結果轉為邏輯輸出。此元件在馬達運轉時位準改變的次數遠少於光編碼器,位準的判 定方式為訊號的方向而不是大小,轉換的點為待測訊號值為零的地方,因此可以在特定 位準變換的時候得知轉子角度。 圖 2.2 光編碼器示意圖 利用光感測器在固定時間內的轉換次數可以轉換成速度,而兩組感測器間的序列變 化可以得到轉向,將光編碼器加入處理可以得到明確的角度資訊。2.1.2 五相馬達模型
五相馬達內部的線圈如圖 2.3 所示,理想狀況下假設馬達每一相線圈之間彼此相等 而平衡,其線圈的電路可以等效為一組電阻 r 以及電感 L 的組合,五組之間的電阻以及 電感相等,線圈間的互感為零。 穩態狀況下馬達供電藉由反流器運作送電,輸出五組平衡而理想的電流至馬達,假 若此時馬達以轉速ωr運轉,而各相線圈上有相應而生的感應電動勢e存在。假設馬達線 圈的電阻值r極小,導致電流流經線圈所產生的功率很小,其能量的耗損可以略去不計。 在這種狀況下,反流器電能完全轉換成馬達的機械能,在反流器供應的電流以及馬達感 應電動勢波形作用下馬達轉矩Tem可以式(2.1)表示。 r e e d d c c b b a a em i e i e i e i e i e T ω ] [ + + + + = (2.1) − + − + − + − + − + b e c e d e e e a e L r L L L L r r r r a i b i c i d i e i 圖 2.3 五相線圈圖2.2 五相馬達相序
2.2.1 理想感應電動勢
在馬達運作下,馬達上的線圈會產生出相應的感應電動勢,其波形與馬達轉子有 關。理想狀況下馬達以穩定速度運轉,五相馬達上各相感應電動勢波形依照與轉子的角 度差異,呈現相差72°的理想弦波分布。在五相馬達中定義角度差為72°的兩組線圈為 相鄰線圈,觀測馬達感應電動勢波形,依照相鄰角度差定義出五組線圈 a、b、c、d 以 及 e,拉出其中三組波形觀測如圖 2.4 所示。而感應電動勢的峰值與當前的轉速有關, 在轉子轉速穩定的狀況下,各相波形的峰值皆為固定且彼此相等。在馬達轉速為ωr而轉 子位置在θ 時,五相感應電動勢的波形如同式(2.2)所示: r ) 288 cos( ) 216 cos( ) 144 cos( ) 72 cos( cos ° − = ° − = ° − = ° − = = r r v e r r v d r r v c r r v b r r v a k e k e k e k e k e θ ω θ ω θ ω θ ω θ ω (2.2) r θ a e eb ec π 2 4π 圖 2.4 理想狀況下馬達感應電動勢波形感應電動勢波形其相序與馬達的轉向有關,假設馬達目前轉子轉向轉至另一個方 向,則此時的感應電動勢波形對照轉子的圖可以圖 2.5 表示。在實際狀況下馬達轉子順 時針運作時波形如圖 2.4 所示,而逆時針運作方向波形如圖 2.5 所示。 r θ π 2 4π a e b e c e 圖 2.5 改變轉向之理想感應電動勢波形 由圖 2.4 作為延伸,五相馬達在順時針方向轉動,五組線圈上的相序呈現弦波分佈, 個別的角度為θr,θr−72°,θr −144°,θr−216°,θr −288°,如式(2.3)左側的序列。同樣的, 觀察圖 2.5 五相線圈相序對應的角度為θr,θr − 288°,θr−216°,θr−144°,θr −72°,如式(2.3) 右側的序列。由此可知,此二序列的感應電動勢一致,僅有轉向不同。 k k e k k e k k e k k e k k e r r v r r v e r r v r r v d r r v r r v c r r v r r v b r r v r r v a )) 72 ( cos( ) 288 cos( )) 144 ( cos( ) 216 cos( )) 216 ( cos( ) 144 cos( )) 288 ( cos( ) 72 cos( ) cos( cos ° − − = ° − = ° − − = ° − = ° − − = ° − = ° − − = ° − = − = = θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω (2.3)
2.2.2 實際感應電動勢波形與馬達扭矩
在實際狀況下,馬達運作時所產生的感應電動勢不是理想弦波,轉子轉動時除了基 本頻率之外,也伴隨著其他高次項的諧波成份出現。在(2.3)式中理想感應電動勢的方程 式在這裡稍作修改,利用Knωr代表第 n 次項諧波的峰值,取代原先的k 。而偶次項的v 諧波成份為零,因此在式中的 n 值皆為奇數,此時在式(2.3)中的感應電動勢波形可以進 一步修改成式(2.4): n K e n K e n K e n K e n K e n n r r e n n r r d n n r r c n n r r b n n r r a ∑ − ° = ∑ − ° = ∑ − ° = ∑ − ° = ∑ = )) 288 ( cos( )) 216 ( cos( )) 144 ( cos( )) 72 ( cos( ) cos( θ ω θ ω θ ω θ ω θ ω (2.4) 感應電動勢的諧波能量與其次項成反比,在基本波以外的能量消減的速度相當的急 劇,因此整體的波形大致上還是呈現弦波分佈。而在馬達驅動時,利用編碼器可以得到 轉子的位置資訊θ ,接著用反流器輸入相應的電流提供馬達扭矩。 r 假若反流器輸出的電流波形與感應電動勢基本波同相序,在馬達穩定運作下輸入理 想弦波電流。此時定子線圈上流過的電流其峰值為 I,θ 為從編碼器上獲得的資訊,反r 流器輸出與馬達實際轉子位置之間的追隨有φ的誤差存在,相對應的電流方程式可以如 同式(2.5)所示: ) 288 cos( ) 216 cos( ) 144 cos( ) 72 cos( ) cos( * * * * * φ θ φ θ φ θ φ θ φ θ + ° − = + ° − = + ° − = + ° − = + = r e r d r c r b r a I i I i I i I i I i (2.5) 將上述二式帶入式(2.1),經過運算可得到馬達的輸出扭矩,列式於式(2.6): K + + + + + + + = ) 20 cos( ) ( 2 5 ) 10 cos( ) ( 2 5 cos 2 5 21 19 11 9 1 φ θ φ θ φ r r em IK IK IK IK IK T (2.6)於式(2.6)中可以看出,扭矩為電流與各項感應電動勢基頻成分的加總,其他頻率 的組合則變成高次項的諧波,φ為零時可以得到最大扭矩。 諧波成分在運算中會有互相抵消的狀況,於式(2.6)中感應電動勢在三、五、七次 諧波成分,與電流波形相乘後加總的結果皆為零,而不會影響到馬達的運作。經過三角 函數和差化積運算,九、十一次的感應電動勢成分會與電流產生十倍頻的扭矩。因此在 控制器的設計中,三次到七次的頻譜成份影響可以略去不計,僅需考慮九次以上諧波的 成分。 同樣的抵消的情形會發生在十三、十五、以及十七次的部分,高次項的諧波成分 會累積於以十倍頻率為主的式子中,這一部分的能量主要帶給馬達的是漣波轉矩,影響 馬達轉速的變動。使用 PWM 的架構下能量分布在基頻時為最大,在諧波次項中隨著頻 率的增加而快速的減少。靠近基頻的諧波成分對馬達有較大的影響,三相馬達的扭矩在 三次諧波的部分會相消不會作用,但會受到五次、七次諧波的影響。相較之下影響五相 馬達的諧波成分,其頻譜較高且數量分部較少,諧波對五相馬達的影響比三相馬達要小 許多。
2.3 五相馬達驅動模型
2.3.1 五相反流器模型
在實際的控制中,五相馬達的運作需要接上相同相數的五相反流器驅動控制,整個 架構如同圖 2.6 所示。五相反流器主要由十組開關以及電容組成,開關兩兩一組形成一 臂與馬達端子連接由直流鏈端提供電壓源,而在入電側加上電容穩壓。 在 2.2 節中利用感應電動勢定義出五相馬達的順序,將反流器接至線圈端的部份定 義其電位點 a、b、c、d 以及 e。直流鏈端的電容值其值極大,在穩定運作下兩組電容的 壓降會相等,定義其中心點電位為 o。在單組五相馬達的運作中,由於五相馬達的另一 端不需要接至其他馬達接線,因此在這裡將其以星型接法將其連接而成中性點,定義此 點電位為 n。驅動的方式是使用開關切換將直流鏈的電流送入馬達,在電路運作期間, 五相反流器依照 SPWM 的開關切換方式運作。 − + − + − + − + − + b e c e d e e e a e L r L L L L r r r r a i b i c i d i e i + a T − a T + b T − b T + c T − c T + d T − d T + e T − e T dc V N n o 2 dc V 2 dc V a b c d e 圖 2.6 五相馬達驅動電路組態 一般的三相馬達驅動方法分為方波驅動以及正弦波驅動,前者將反流器六個開關以 單純方波訊號切換來驅動馬達運轉,後者驅動方式如一般的交流馬達。正弦波驅動在定 子端輸入三相正弦波訊號、合成一旋轉磁場帶動轉子旋轉,本論文採用正弦波驅動馬達 運作,故在此節略去方波驅動的介紹。如同三相馬達的驅動,在五相馬達的控制可以沿 用這個方法。圖 2.6 中一共會輸出的 10 組開關波形,主要是兩種類型的訊號比較的結果,一組是 固定峰值頻率的三角波訊號、一組是依照相序以及角度改變的弦波訊號。定子端輸入的 理想弦波電流可由程式產生,在反流器的每一相上各有一組上下臂開關,利用特定的運 作策略可以使反流器輸出近似正弦波的訊號。反流器的一組上下臂開關僅有四種變化: 分別是[上臂 on 下臂 on]、[上臂 on 下臂 off]、[上臂 off 下臂 on]以及[上臂 off 下臂 off], 其中兩個開關動作皆為 off 的開關組態皆視為開路,開路狀態對於整體的電路而言沒有 辦法控制,因此算三種狀態。而兩組開關動作皆為 on 的狀態下視為短路,由於開關的 阻值遠小於馬達線圈,因此此狀態可以視為直流端電壓直接通過兩個開關,此時開關會 損毀。因為這兩種狀況皆不是理想的電路操作,且有對電路造成損壞的問題,在此控制 方式中主要利用其他兩種開關狀態。 在這裡使用 SPWM 控制開關的狀態,使其輸出的頻譜類似弦波。SPWM(sinusoidal pulse width modulation 弦波脈衝寬度調變)利用一組固定頻率的三角波以及弦波訊號做 比較,依照比較結果決定開關的狀態,改變開關的 duty(工作週期):當弦波值最大時開 關的 duty 為最大,相對的弦波值最小時開關的 duty 最小,將 a 相的控制訊號與三角波 訊號v 拉出比較如圖 2.7 所示。當馬達正常運作時編碼器送出位置資訊,藉由程式處理tri 後得到相應的弦波控制訊號vcont,控制訊號的峰值由程式控制。將此訊號與三角波比較 後可以得到兩種狀態,導通或是開路,此為 a 相開關上臂的開關訊號。而由上段所提及 的開關組態可以明白,下臂的開關不能與上臂的相同,因此下臂開關的產生方式主要是 由邏輯電路產生相反的狀態。 a cont v vtri + a G 圖 2.7 開關訊號示意圖
2.3.2 單相馬達相圈等效模型
在電路運作期間,反流器開關依照 SPWM 運作,依照其控制方式有兩種輸出狀態, 而整體的馬達驅動模型可以進一步定義如圖 2.8。 − + − + − + − + − + b e c e d e e e a e L r L L L L r r r r a i b i c i d i e i + a T − a T + b T − b T + c T − c T + d T − d T + e T − e T dc V 2 dc V 2 dc V + a G − a G + b G − b G + c G − c G + d G − d G + e G − e G a contv , vcont,b vcont,c vcont,d
tri v e cont v , 圖 2.8 開關與馬達驅動電路組態 利用向量關係,反流器輸出端在任意時刻的電位點可以定義如式(2.7) e d c b a k v v V v contk tri dc ko , , , , ˆ 2 , = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = (2.7) 觀察反流器上輸出端的電位v ,藉由開關的控制可以輸出兩種電位,利用向量的ko 關係可以得到馬達相電壓的向量關係,列式如下: no kn ko v v v = + (2.8) 平衡穩定的三相系統相電壓互差120°,加總後總值為零。依照這個方式延伸,在穩 態狀況下理想五相系統相電壓彼此互差72°,而在加總後其總值亦為零。因此在式(2.8)
中,將五相的方程式帶入加總,可以得到式(2.9)的結果。因此藉由(2.8)以及(2.9)兩式的 關係,可以得到五相馬達相電壓公式,如同式(2.10)。 ) ( 5 1 eo do co bo ao no v v v v v v = + + + + (2.9) ) ( 5 1 eo do co bo ao ko kn v v v v v v v = − + + + + (2.10) 根據馬達上相電壓v 以及在先前描述的馬達模型,可以得到此時流過馬達的電流kn 方程式,而相電壓經過向量的代換可以得出控制命令對上馬達電流的方程式。推導其方 程式如式(2.11)的結果,電感 L 以及電阻 r 為任意時刻存在於馬達上的阻抗,假設馬達 五相線圈間彼此無互感,馬達上每一相線圈的電壓輸入轉換電流可以下式表示。 t ri dt t di L t e t v t v v V t ri dt t di L t e t v t v t e t v t ri dt t di L k k k no k cont tri dc k k k no ko k kn k k ), ( ) ( ) ( ) ( ) ( ˆ 2 ), ( ) ( ) ( ) ( ) ( ), ( ) ( ) ( ) ( , − − = + + = − − − = + 將上面列式轉換如式(2.11),可以得到電壓轉換電流方塊圖如圖 2.9: k k no k cont tri dc v v e Ls r i v V ) ( ˆ 2 , − − = + (2.11) + ko v no k v e + r Ls+ 1
Motor model per phase
k cont v , ik tri dc v V ˆ 2 圖 2.9 馬達模型方塊圖 從圖 2.9 中觀測,反流器輸出端的電壓經過感應電動勢以及代換後,經過馬達線圈 的等效電路後得到電流。反流器的控制電壓是利用程式控制回授產生,在馬達運作時利 用電流感測器回授電流至系統。在這裡先將電流轉換係數定義為K ,而假定能理想轉s 換Ks =1,整體架構如圖 2.10 所示。
* k i k cont v , vko + no k v e + r Ls+ 1
Motor model per phase
k i tri dc v V ˆ 2 Current Controller 圖 2.10 電流控制等效方塊圖 假設電流迴路控制器設計良好,各相電流皆能緊密追隨該相電流命令,使扭矩方程 式 2.6 中電流與感應電動勢之相位差φ 為零。在式 2.6 中的運算結果含有諧波成份會造 成馬達轉速的變化,而其諧波次項在九次以上會對扭矩作用而其值極小,因此在這裡忽 略諧波成份。
2.3.3 馬達機械模型
在實作中五相馬達運作時會加入一組對接的馬達,馬達的相數可以自由選取,在這 裡採用三相馬達系統。作為負載而言,馬達拉出的線圈不與反流器連接,而是接至電阻, 其扭矩大小TL與當前轉速以及接上的負載有關。此時所操控的五相馬達轉動慣量為 J 而 黏滯係數為 B,兩個參數與馬達的對應關係如式(2.12)。 dt d B dt d J T Tem− L = ωr + θr (2.12) 將式(2.12)做轉換,得到式(2.13),此時馬達系統與扭矩的關係可以用圖 2.11 來表 示。 ) (Js B T Tem− L =ωr + (2.13) em T L T B Js+ 1 ωr 圖 2.11 馬達轉速與扭矩方塊圖 同樣的,假設控制器為理想的狀況下,利用程式處理回授的轉速命令產生適當電流 訊號,電流與感應電動勢作用的扭矩如式(2.6)所示。而假定感應電動勢諧波成份的影響 極小,扭矩可以近似如式(2.14),則速度控制迴路可以等效如圖 2.12 之等效方塊: K + + + + + + + = ) 20 cos( ) ( 2 5 ) 10 cos( ) ( 2 5 cos 2 5 21 19 11 9 1 φ θ φ θ φ r r em IK IK IK IK IK T 1 2 5 IK Tem ≅ (2.14) * r ω r ω 2 5K1 Tem L T B Js+ 1 圖 2.12 速度控制方塊圖2.4 五相馬達控制架構
在圖 2.10 以及圖 2.12 的方塊圖中,分別使用了兩種控制器,於本節中一併作介紹。 五相馬達的控制架構如圖 2.13 所示,在此架構下利用速度迴路控制,使馬達維持穩定的 轉速運作。整個架構分為兩部份討論,分別是命令產生以及控制回授的區塊,在本實作 中兩種五相馬達的控制都遵循著這個架構運作。 * r ω r ω r θ * d i * e i * c i * a i * b i I ) 0 ( ) 288 cos( ) 216 cos( ) 144 cos( ) 72 cos( cos ° = ° − ° − ° − ° − φ θ θ θ θ θ r r r r r a i b i c i d i e i a cont v , b cont v , c cont v , d cont v , e cont v , 圖 2.13 五相永磁同步馬達速度控制 在先前對馬達的簡介中有提及編碼器訊號,在適當的電路調整下將此部分的訊號輸 入至控制器,利用解碼器將此三部份的訊號轉變成馬達轉子角度θ 。在程式中使用計數r 器計算時間,並紀錄馬達轉子角度在固定時間內的變動值,經過運算後可以得到當前馬 達轉動的速度ωr。將ωr以及轉速命令 * r ω 比較取得差值,帶入速度迴路控制器運算,得 出適當的電流命令峰值。接著利用位置訊號θr在程式中做查表,依據給定的每相輸出相 位差,產生式(2.5)的電流弦波波形。由式(2.6)中的馬達扭矩方程式可以看出,當相位差 φ值帶入零的時候可以使馬達產生最大的扭矩,因此在查表時將相位差φ設為零。得到 適當的弦波波形後,將此值與速度控制器產生的電流峰值相乘,產生理想的五相電流命 令。 此外在實際操作中,程式需要回授當前馬達線圈的電流資訊,依照定義的線圈,分 別是i 、a i 、b i 、c i 以及d i 。在此狀況下將回授的電流以及速度控制器產生的電流命令e 相減,取其誤差值後進入電流控制器,經過運算後取得五組電壓控制訊號。第三章
雙五相馬達接線與控制
3.1 五相平衡相序
在本論文的雙五相馬達系統中,所使用的反流器以及控制系統只有一組,而兩組馬 達之間的接線以端子連接,而線圈的連接必須依照相序排列,在本節中會將馬達的相序 定義。 電路學三相系統中有相序的概念,為正相序與負相序,在三相馬達中僅有轉向的對 應。而在五相馬達中鄰近的兩相線圈角度差為72°,依照相隔72°定義線圈 a、b、c、d 以及 e,可以得到五個在空間中不重複的線圈。當馬達穩定運作下,馬達轉子的位置θr 隨 時 間 改 變 , 任 意 時 刻 下 產 生 的 感 應 電 動 勢 的 基 本 波 波 形 分 別 可 以 表 示 為 ) 144 cos( ), 72 cos( ,cosθr θr− ° θr− ° ,cos(θr −216°),cos(θr−288°),這部分在上一章當中有討
論過。拉出五相馬達的其中三組線圈 a、b、c,對應轉子位置θ 的感應電動勢如圖 3.1,r 此 時 相 鄰 的 線 圈 互 差 72° , 而 此 三 組 線 圈 的 感 應 電 動 勢 基 本 波 波 形 為 ) 144 cos( ), 72 cos( , cosθr θr− ° θr− ° 。 r θ a e eb ec π 2 4π 圖 3.1 相隔72°的感應電動勢波形
將相隔的角度改變,使定義線圈之間相鄰的角度從72°調整至144 ,可以定義出不° 重 複 的 線 圈 a 、 b 、 c 、 d 以 及 e , 其 感 應 電 動 勢 的 基 本 波 波 形 分 別 可 以 表 示 為 ) 288 cos( ), 144 cos( ,
cosθr θr− ° θr− ° ,cos(θr−72°),cos(θr −216°)。利用同樣的電路,測量在
此定義下的三組線圈 a、b、c,在固定轉速以及轉向的狀況下可以得到圖 3.2 的波形。 此 時 定 義 的 三 組 線 圈 相 差144 , 而 其 感 應 電 動 勢 的 基 本 波 波 形 可 以 表 示 為° ) 288 cos( ), 144 cos( , cosθr θr− ° θr− ° 。 r θ π 2 4π a e eb ec 圖 3.2 相隔144 的感應電動勢波形 ° 將定義的線圈其相鄰角度再調整為216°以及288°,可以發現此五組線圈在空間中 呈現彼此獨立、沒有重疊的情況。其中相鄰角度互差288°在第二章有討論過,與相鄰角 度72°的相序組合一樣而轉向相反。相鄰角度互差216°時的狀態,與互差144 的感應電° 動勢波形列式如式(3.1),感應電動勢一致而在轉向部份有差異。 n K n K e n K n K e n K n K e n K n K e n K n K e n n r r n n r r e n n r r n n r r d n n r r n n r r c n n r r n n r r b n n r r n n r r a ∑ − − ° = ∑ − ° = ∑ − − ° = ∑ − ° = ∑ − − ° = ∑ − ° = ∑ − − ° = ∑ − ° = ∑ − = ∑ = )) 144 ( cos( )) 216 ( cos( )) 288 ( cos( )) 72 ( cos( )) 72 ( cos( )) 288 ( cos( )) 216 ( cos( )) 144 ( cos( ) cos( ) cos( θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω θ ω (3.1)
依照定義線圈相隔的角度不同,將這些線圈的感應電動勢基本波組合排列,可以得 到四種相序,分作四行列式如下式,θr表示馬達轉子位置 ) 72 cos( ), 144 cos( ), 216 cos( ), 288 cos( , cos ) 144 cos( ), 288 cos( ), 72 cos( ), 216 cos( , cos ) 216 cos( ), 72 cos( ), 288 cos( ), 144 cos( , cos ) 288 cos( ), 216 cos( ), 144 cos( ), 72 cos( , cos ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − ° − r r r r r r r r r r r r r r r r r r r r θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ 第一行與第四行可以視為馬達在同一組相序中不同轉向時的相序組合,於前一章中有提 及,相鄰的項次互差72°,記為相序 1;第二行與第三行可以視為馬達在另一個相序中 不同轉向時的相序組合,相鄰的項次互差144 ,記為相序 2。不考慮轉向的問題,就五° 相馬達而言有兩種不同的相序。考慮到五相馬達有不同相序的可能性,利用微控器控制 反流器的輸出,使感應電動勢以及線圈電流的相序能夠相對應,這是在前一章的處理方 式。於本章節中利用所定義的相序,改變反流器的電流以及馬達感應電動勢的相序,使 兩者在不同相序下運作,並依照其結果做進一步的延伸。
3.1.1 馬達扭矩
除了馬達的感應電動勢具有相序的特性外,五相反流器輸出的電流相序亦可調整, 依照上段介紹的分類將電流方程式調整為相序 2。假設電流方程式為理想弦波,峰值為 I 相位差φ調整為零,將此時的電流方程式帶入式(2.1)的扭矩方程式,感應電動勢目前 為相序 1,θ 表示馬達位置資訊,計算在此相序排列下的扭矩,列式如下: r 0 15 cos ) ( 5 cos ) ( 16 14 6 4 = + + + + = K r r em IK IK IK IK T θ θ (3.2) 與式(2.6)相比較,基頻部份的值經過運算後會全部抵消,式(2.6)中會產生扭矩的十 倍頻諧波成分在這裡也會抵消。利用和差化積運算,在四次以及六次的感應電動勢成分 會與電流波形產生五倍頻的扭矩成分,同樣的在十四次以及十六次的感應電動勢亦可以 產生十五倍頻的扭矩成分。在偶次項部分的諧波成分為零,所以這邊的漣波扭矩都不會 產生,因此以相序 2 組成的電流成分無法與以相序 1 排列的馬達感應電動勢作用。 在五相馬達每一相感應電動勢穩定且均衡的狀況下,輸入的電流相序與感應電動勢 的相序相異的話,兩個成分不會作用。在上段中感應電動勢的相序 1 與相序 2 的電流成 分,經過計算扭矩為零,考慮將兩者的相序對調。調整馬達的相序至相序 2,電流方程 式維持於相序 1 的狀況下,帶入式(2.1)運算可以發現其扭矩亦為零,這樣的情況意味著 能量在不同相序的成分下不會轉成扭矩。 在下一節中會介紹接線的方式。利用這個架構可以使用一組反流器運作兩顆馬達, 且達成此兩組五相馬達間彼此呈現獨立運作的狀態。3.2 馬達連線
在這裡先作定義:反流器的五組線圈其輸出相序標誌為 a、b、c、d 以及 e,相鄰輸 出接點相位差72°。第一顆串接馬達系統 M1 的定子線圈定義為 a1、b1、c1、d1、e1, 相鄰相線圈彼此互差72°;第二顆馬達 M2 定子線圈定義為 a2、b2、c2、d2、e2,相鄰 相線圈彼此互差72°。假設 M1 上的線圈理想而平衡,線圈上的電感值L1與電阻值r1彼 此相等;同樣的,M2 上的線圈理想而平衡,線圈上的電感值L2與電阻值r2彼此相等。 M1 與 M2 所使用的規格不受限制,負載亦可自行選定。 兩顆馬達的線圈排列皆依照相序 1 做排列,連接的部分再作處理。依照相序串接如 圖 3.3 所示,馬達的模型沿用圖 1 的設定,由於反流器部分的架構維持不變,在這裡略 去不提。圖 3.3 的接線,反流器接到 M1 是以相序 1 接線、接到 M2 是以相序 2 連接: 以 M1 定義的線圈調整要接到 M2 的位置,a1 對齊 a2,之後每一個接點在空間中相隔144° 的地方連接,M2 另一端以星型接線連接。 − + − + − + − + − + − + − + − + − + − + 1 b e 1 c e 1 d e 1 e e a i b i c i d i e i 1 a e 2 b e 2 c e 2 d e 2 e e 2 a e 2 L r2 1 L r1 1 L r1 1 L r1 1 L r1 1 L r1 2 L r2 2 L r2 2 L r2 2 L r2 圖 3.3 雙馬達連線模型 依照相序的排列連接,靠近反流器端的馬達 M1 以相序 1 排列,接線依序為 a1、b1、 c1、d1、e1;M2 接線以相序 2 排列,接線依序為 a2、c2、e2、b2、d2,將兩組接線依 序串接:兩組馬達的定子線圈中定義“a1”與“a2”直接連接,在第一顆馬達中定義“b1”的 定子線圈,需要與第二顆馬達“c2”的定子線圈連接,第一顆馬達定義“c1”的線圈連接到 第二顆馬達“e2”的線圈。第一顆馬達定義“d1”的線圈連接到第二顆馬達“b2”線圈。第一 顆馬達定義為“e1”的線圈連接到第二顆馬達定義為“d2”的線圈。假若反流器的電流輸出維持在相序 1 不變,而所得到的轉子資訊準確相位差φ為 零,其角度變化依照 M1 的編碼器變化。並且在此狀況下,兩組馬達在各自穩定的狀態 運作:M1 此時轉速為ω ,轉子位置為r1 θ 、M2 此時轉速為r1 ω ,轉子位置為r2 θ ,感r2 應電動勢速度增益常數改以 H 表示,而從反流器看到的感應電動勢可表示為(3.3): d e e b d d e c c c b b a a a e e e e e e e e e e e e e e e , 2 , 1 , 2 , 1 , 2 , 1 , 2 , 1 , 2 , 1 + = + = + = + = + = (3.3) 此時 M1 的扭矩如同下所示,與式(2.6)相同,依照公式的算法帶入,M2 的扭矩如式(3.4): K + + + + + = ) 20 cos( ) ( 2 5 ) 10 cos( ) ( 2 5 2 5 1 21 19 1 11 9 1 1 r r em IK IK IK IK IK T θ θ Tem2 =0 (3.4) 同樣的結果會出現在各電流與感應電動勢同頻的部份,而在式(2.4)中有 10 倍頻漣波的 部份亦會有同樣的狀況發生,亦即對應 M1 的反流器電流成分不會對串連狀況下的 M2 產生磁動勢以及轉矩。假若將此時反流器的輸出電流相序作調整,使其對應至串接下的 M2,θ 為反流器目前電流的角度值,將此時反流器的電流角度跟隨 M2 做變化,如下r 式: ) 216 cos( ) 72 cos( ) 288 cos( ) 144 cos( ) cos( ° − = ° − = ° − = ° − = = r e r d r c r b r a I i I i I i I i I i θ θ θ θ θ 此時計算 M2 的扭矩可以得到跟式(2.6)類似的結果,而經過調整的反流器電流相序與 M1 之間則完全的抵消,如同式(3.5)。 0 1= em T
K + + + + + = ) 20 cos( ) ( 2 5 ) 10 cos( ) ( 2 5 2 5 2 21 19 2 11 9 1 2 r r em IH IH IH IH IH T θ θ (3.5) 由上面的運算結果我們可以得到一個關係,在依照圖 3.3 連接的馬達系統中,五相 反流器的電流固定輸出一組相序(相序 1 或相序 2)的電流成分。這樣的狀況下,對於兩 組馬達而言,僅有對應相序的馬達會產生相應的扭矩,而不同相序的馬達不會受到其影 響,亦即在此相序下的電流成分會流過馬達線圈但不產生扭矩。 更進一步來說,兩組不同相序的馬達因接線的關係有獨立的表現,考慮利用控制器 將反流器輸出的電流成分調整,使輸出的電流同時存在相序 1 及相序 2 兩種相序的組 合。在這裡將相序 1 的電流成分其峰值定義為I1、頻率定義為ω ,r1 θ 為此相序電流的r1 角度值。而相序 2 的電流成分其峰值定義為I2、頻率定義為ω ,r2 θ 為此相序電流的角r2 度值,式(3.6)為反流器電流的方程式。 ) 216 cos( ) 288 cos( ) 72 cos( ) 216 cos( ) 288 cos( ) 144 cos( ) 144 cos( ) 72 cos( ) cos( ) cos( 2 2 1 1 2 2 1 1 2 2 1 1 2 2 1 1 2 2 1 1 ° − + ° − = ° − + ° − = ° − + ° − = ° − + ° − = + = r r e r r d r r c r r b r r a I I i I I i I I i I I i I I i θ θ θ θ θ θ θ θ θ θ (3.6) 在此狀況下,利用扭矩方程式(2.1)運算如式(3.7): 1 1 1 , 1 , 1 , 1 , 1 , 1 1 2 5 ] [ K I i e i e i e i e i e T r e e d d c c b b a a em = + + + + = ω (3.7) 對 M1 能產生磁動勢以及扭矩Tem1的電流成分峰值為I1、頻率為ω ,穩態狀況下馬達會r1 在ω 的轉速下運轉。電流與感應電動勢頻率相同的成分貢獻主要的扭矩,此外有能量r1 相對而言極小的能量會在十倍頻率的地方貢獻漣波成分,在這邊略去不計;峰值為I2、 頻率為ω 部分的電流不會對 M1 造成影響。相對的,M2 的扭矩利用扭矩方程式(2.1)r2 計算可以得到式(3.8):
1 2 2 , 2 , 2 , 2 , 2 , 2 2 2 5 ] [ H I i e i e i e i e i e T r c e e d b c d b a a em = + + + + = ω (3.8) 經由串接送到 M2 的電流成分中,僅有峰值為I2、頻率為ω 部分的電流能對其產生磁r2 動勢以及扭矩Tem2,列式如(3.8)。與式(3.7)相同,電流以及感應電動勢在頻率相同的地 方貢獻主要的扭矩,其它極小的能量則在高頻的部份產生諧波,同樣的略去不計。而峰 值為I1、頻率為ω 部分的電流,對於 M2 感應電動勢相乘的結果互消,造成的輸出扭r1 矩為零。 在(3.7)以及(3.8)兩個扭矩方程式的運算結果可以看出,依照相序作排列的反流器入 電電流成份僅會對同相序接線的馬達產生磁交鏈及扭矩,而不同相序的馬達則會相互抵 消,僅在固定的諧波項次貢獻漣波。因為這樣的特點,所以只要控制反流器的輸入成分, 就可以一次對兩組馬達做個別的控制。
3.3 雙五相馬達驅動模型
3.3.1 雙五相馬達系統驅動組態
由 3.2 節的討論可以明白,混合兩種相序成分的電流波形,在兩組不同相序定義的 馬達中流通,馬達僅會與相同相序的電流產生扭矩。在這種狀態下,兩組馬達的驅動架 構可以簡化,在此節中討論雙馬達系統的架構。 為了方便做分析,在這裡先將圖 2.8 的驅動模型沿用如同圖 3.4 所示,利用程式控 制反流器可以得到需要的電流輸出,因此在這個部份的架構維持不變。在反流器的開關 控制訊號部分,其比較的訊號為兩組命令的組合,因此將比較器的部份移至之後的章節 說明較為直觀。原有的單組馬達驅動架構中,一側接上反流器,另一側以星型接法形成 中性點,在這裡將此部分解開。將馬達上標示為”-”的端子與另一組馬達標示為”+”的部 份連接,接線的方式依照 3.2 節的接法連接,並將另一組馬達上標示為”-”的另外五個端 子以星型接法連接。在電路運作期間,反流器開關依照 SPWM 運作,其控制方式維持 不變。 − + − + − + − + − + − + − + − + − + − + b e1, c e1, d e1, e e1, a e1, b e2, c e2, d e2, e e2, a e2, 2 L r2 1 L r1 1 L r1 1 L r1 1 L r1 1 L r1 2 L r2 2 L r2 2 L r2 2 L r2 a i b i c i d i e i + a T − a T + b T − b T + c T − c T + d T − d T + e T − e T dc V 2 dc V 2 dc V 圖 3.4 雙五相馬達驅動電路3.3.2 雙馬達系統下單相線圈電氣方程式
觀察圖 3.4,開關組態的關係可以表示如下: e d c b a k v v vko = kn + no, = , , , , 此時從反流器端觀測馬達相電壓,每一相的電壓皆含有兩組馬達的成分,在理想且平衡 的狀況下,兩組馬達線圈的相電壓總和皆為零。利用這個特性將反流器上五臂的電壓點 加總,反流器輸出端在任意時刻的電位點可以定義如式(3.9): ) ( 5 1 eo do co bo ao ko no ko kn v v v v v v v v v = − = − + + + + (3.9) 而馬達上線圈電流與相電壓的關係與第二章推導的方式類似,在這裡由於線圈串聯 的緣故,每一相線圈上會有另一組馬達線圈的感應電動勢以及阻抗。在這裡假設 M1 在 穩態下以ω 的轉速運作、此時線圈上的感應電動勢為r1 e1,k;M2 在穩態下以ω 的轉速r2 運作、此時線圈上的感應電動勢為e2,h。假設作用的兩組馬達,其線圈皆無互感作用且 每相的阻抗皆為相等,在串接系統下的阻抗為兩組組抗串聯。 在同一組接線上,阻值為 M1 上線圈的阻抗加上 M2 上線圈的阻抗,關係式列式如 下: ); ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ); ( ) ( ) ( ) ( ) ( ) ( ) ( 2 1 2 1 , 2 , 1 , 2 , 1 2 1 2 1 t i r r dt t di L L t e t e t v t v t e t e t v t i r r dt t di L L k k h k no ko h k kn k k + + + = − − − − − = + + + 將上面的關係式轉換得到式(3.10),並利用電流與電壓的關係可以得到雙馬達系統 下的線圈等效方塊圖如 3.5 所示: i r r si L L v e e v v V no h k k cont tri dc ( ) ( ); ˆ 2 , − 1, − 2, − = 1+ 2 + 1+ 2 (3.10) no h k e v e1, + 2, + + ko vMotor model per phase
) ( ) ( 1 2 1 2 1 L s r r L + + + k cont v , tri dc v V ˆ 2 k i 圖 3.5 雙馬達系統下單組馬達線圈模型
依照式(3.10)的運算結果,將反流器的架構加入,假設此時電流控制器的輸出為理 想,使馬達系統能夠穩定運作。電流控制器的輸出為控制開關的電壓vcont,k,經過開關 切換的轉換後變成反流器的輸出組態,利用式(3.10)的關係式,可以得到圖 3.6 的雙馬達 系統下反流器輸出的電流控制等效方塊圖: * k i k cont v , vko k i no h k e v e1, + 2, + ) ( ) ( 1 2 1 2 1 L s r r L + + + tri dc v V ˆ 2 圖 3.6 電流控制等效方塊圖 假設整體的系統運作情況理想,在兩組編碼器持續回授馬達轉子位置的狀況下,各 相反流器電流皆能緊密追隨該相電流命令。此時對應的電流與感應電動勢之相位差φ 為 零,使輸出的扭矩能夠最大,接下來在這個狀況下討論雙馬達系統的機械運作狀況。
3.3.3 雙馬達系統下馬達機械模型
在 3.2 節中有討論過,不同相序的馬達感應電動勢與流通電流兩者不會作用,現在 利用控制器控制反流器的輸出,使輸出的電流為兩組馬達電流命令的總和。此狀況下電 流會流經線圈而不產生扭矩,因此對於扭矩方程式而言,兩組的模型是獨立的。 在式 3.7 以及式 3.8 中的運算結果將諧波成份忽略,而兩組馬達在實作時選用的規 格皆為一致,採用的負載彼此獨立,分別是TL1以及TL2。假設所操控的五相馬達 M1 轉 動慣量為J1而黏滯係數為B1、M2 轉動慣量為J2而黏滯係數為B2,兩個參數與馬達的 對應關係如下所示: dt t d B dt t d J t T t Tem1( )− L1( )= 1 ωr1( )+ 1 θr1( ) dt t d B dt t d J t T t Tem2( )− L2( )= 2 ωr2( )+ 2 θr2( ) 將上兩式轉換成式(3.13)以及(3.14)並以此做圖,馬達系統與扭矩的關係可以用圖 3.7 來 表示。 ) ( 1 1 1 1 1 T J s B Tem − L =ωr + (3.13) ) ( 2 2 2 2 2 T J s B Tem − L =ωr + (3.14) em T L T B Js+ 1 ωr 圖 3.7 雙馬達系統下單顆馬達機械模型 假設馬達速度控制架構運作良好,在系統運作下能理想的控制反流器,使反流器輸 出I1以及I2電流成分的總和,電流方程式可以對照式(3.6)。I1的相序對應到馬達 M1 而 2 I 的相序對應到馬達 M2 的相序,在相序有差異的狀況下兩組馬達的扭矩不會互相影 響,使兩組馬達能在個別額定的轉速下穩定運作。 在此狀況下 M1 扭矩僅與電流成分I1作用,M2 扭矩僅與電流成分I2作用,假設馬 達的扭矩方程式中諧波值極小可以略去不計,可以分別將兩組馬達的速度控制方塊以圖 3.8 來表示。* 1 r ω 1 r ω 2 5K1 Tem1 1 L T 1 1 1 B s J + * 2 r ω 2 r ω 2 5H1 Tem2 2 L T 2 2 1 B s J + 1 I 2 I 圖 3.8 速度控制方塊 比較圖 3.6 以及圖 3.8,由於電流與感應電動勢在不同相序狀態中不會做用,因此串 接系統下扭矩獨立。但電流會流經兩組線圈,由電流流過電阻所產生的功率消耗會比較 大,流過 M1 並會產生扭矩的電流在 M1 以及 M2 上會有線阻產生的耗損,同樣的情形 發生在對 M2 能產生扭矩的電流成分。相較於分別使用兩組反流器控制兩組五相馬達的 控制架構而言,因線阻而產生的消耗是此種架構的兩倍;利用串接系統作為控制雖然在 控制器以及開關使用上較為節省,但在能量在線圈的部份有較多的耗損。

![圖 2.6 中一共會輸出的 10 組開關波形,主要是兩種類型的訊號比較的結果,一組是 固定峰值頻率的三角波訊號、一組是依照相序以及角度改變的弦波訊號。定子端輸入的 理想弦波電流可由程式產生,在反流器的每一相上各有一組上下臂開關,利用特定的運 作策略可以使反流器輸出近似正弦波的訊號。反流器的一組上下臂開關僅有四種變化: 分別是[上臂 on 下臂 on]、[上臂 on 下臂 off]、[上臂 off 下臂 on]以及[上臂 off 下臂 off], 其中兩個開關動作皆為 off 的開關組態皆視為開路,開](https://thumb-ap.123doks.com/thumbv2/9libinfo/8368746.177369/26.892.143.798.448.1133/一組是號一組是有一組上下臂弦波訊號反流器的一組上下臂開路開.webp)