國 立 交 通 大 學
機械工程學系
碩士論文
可應用於微加速計之兩種對稱型懸吊結構研究
Investigations of two symmetric suspensions for
micro accelerometers
研 究 生:廖淳旭
指導教授:徐文祥
可應用於微加速計之兩種對稱型懸吊結構研究
Investigations of two symmetric suspensions for
micro accelerometers
研 究 生:廖淳旭 Student:ChunHsu Liao 指導教授:徐文祥 Advisor:Wensyang Hsu 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A ThesisSubmitted Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering January 2010
Hsinchu, Taiwan, Republic of China
可應用於微加速計之兩種對稱型懸吊結構研究
研究生:廖淳旭
指導教授:徐文祥
國立交通大學機械工程學系 碩士班
摘 要
本論文研究重點在於研究微加速計的懸吊結構,從各方面探討各 種參數對其彈簧係數之影響,使微加速度計之靈敏度得以提高以及結 構上之誤差能夠相應的減少,達到優化的效果。本文提出一種新的點 對稱式懸吊配置,能夠使得帄面雙軸之彈簧係數即使受到製程尺寸誤 差的影響,仍然保持相同,進而使得雙軸之靈敏度也能相等,減少訊 號誤差以及電性上修正的麻煩。本文中也提出一種新型的螺旋式懸吊 結構,將與現今最常使用之蜿蜒式彈簧相互比較,並透過有限元素分 析軟體 ANSYS®執行特性模擬,分析點對稱懸吊配置之蜿蜒式以及螺 旋式彈簧各方面之優缺。 利用 ANSYS®軟體之共振模擬判斷其共振模態以及共振頻率,並 推算出彈簧係數,得知在相同帄面 K 值下,螺旋彈簧的 Z 軸 K 值較 小,表示其 Z 軸靈敏度較高,適合用於三軸加速度計。同時在相同帄 面 K 值時,螺旋彈簧所佔之面積較小,代表有效質量塊面積更大, 整體靈敏度相對更高。而後藉由調整彈簧位置對旋轉模態之共振頻率 影響,瞭解螺旋彈簧位置距中心頇較遠,才能使旋轉共振頻率大於直 線共振頻率,使元件不易出現旋轉的情形。最後模擬 Y 軸 3G 之加速 度,觀察 X 軸位移與 Y 軸位移之比值,推算出螺旋彈簧之耦合誤差 較蜿蜒彈簧小。Investigations of two symmetric suspensions for
micro accelerometers
Student:Chun-Hsu Liao Advisor:Wensyang Hsu
Department of Mechanical Engineering National Chiao Tung University
Abstract
In this study, our research focuses on the suspension structure of the micro
accelerometer. In order to achieve optimal results we explore various parameters in all aspects to understand its influences on spring coefficient, expecting the higher
micro-accelerometer's sensitivity as well as the deviation of the structure be reduced accordingly. This paper presents a new “point symmetrical” suspension configuration, it remains the same spring coefficient of two plane axes even if disturbed by the size deviations from process, and thus keeps equal sensitivity of two axes, reducing the error of the electrical signals. This paper also proposes a new “coil suspension structure”, it compares with the most commonly used serpentine spring through the finite element analysis software ANSYS® and then analyzes the pros and cons of two springs with point symmetrical configuration.
The spring coefficient K can be calculated from determination of the resonance with its resonant modes as well as resonant frequency by using the ANSYS ® simulation software. On the condition of the same K value at plane axes, the coefficient K of coil spring at Z-axis is smaller implicating its applicability of the three-axis accelerometer due to its higher sensitivity at Z-axis. Meanwhile in the same plane K value the smaller area is needed for coil spring. It means that overall
sensitivity is relatively higher because of a larger effective mass of the block. By adjustment of the spring and its impact on the resonant frequency of rotation mode, we understand the need to position coil spring a little farther from the center in order to make spin resonant frequency greater than linear resonance frequency, so that element prevents from spinning. Finally it is concluded that the coupling error of coil spring is smaller than winding spring by observing the ratio of X-axis displacement over Y-axis displacement when simulating 3G on Y-axis acceleration.
誌謝
兩年的碩士生涯,一路上得到許多人的幫助以及祝福,首先要感 謝我的父母親,一直以來他們都是我最有力的後盾,讓我無後顧之憂 並在家庭的支持下完成學業。而在求知的道路上,我很幸運得到機械 系徐文祥老師的指導,徐老師給了我很寬敞的道路以及明確的目標, 並教導我做為一個碩士該有的獨立思考能力,讓我學到了很多不只在 研究上的學問,也了解了待人接物的道理。 由於得到兩位老師的指導,先感謝郁欣學長、小白哥、家聖、高 手毅家、囧夫、謝一哥、A 斌等諸位博班學長的協助,讓還是菜鳥的 我能夠很快的進入狀況,HD、拉可、Smile 這三位學長也給予我們許 多的幫助,也帶領我們歡樂的度過碩一時光,而同窗的胖虎和 TERU 更是自我大學時期一路走來的夥伴,還有頭博、溫大哥、小高和我們 一起打拼,此外,法師、小江、小鐘、謝大哥、該邊、Mike 這些學 弟妹也是讓這實驗室感到很溫暖很熱鬧。 最後也要感謝我天湖教會的會友們,在我研究遇到瓶頸的時候幫 我加油打氣幫我禱告,還有太多的人事物需要感謝了,很感謝,在求 學的道路上,有你們真好。 淳旭 於 新竹交通大學目 次
中文摘要 ... I Abstract ... II 誌謝 ... III 目次 ... IV 表次 ... VII 圖次 ... VIII第一章 序論
1.1 研究背景與動機 ... 1 1.2 文獻回顧 ... 3 1.2.1 加速度計操作原理 ... 3 1.2.2 加速度計感測方式 ... 4 1.2.3 電容式差動對 ... 7 1.2.4 懸吊結構 ... 11 1.2.5 彈簧對稱配置 ... 13 1.3 研究目標 ... 16 1.4 概念設計 ... 17第二章 電容式加速度計之感測電路模擬
2.1 感測電路模擬 ... 18 2.2 同步解調原理 ... 19第三章 懸吊結構模擬方法
3.1 蜿蜒彈簧理論解析 ... 203.2 ANSYS 模擬 ... 21 3.2.1 點對稱配置與線對稱配置 ... 21 3.2.2 蜿蜒式與螺旋式彈簧 ... 24
第四章 製程規劃與量測
4.1 Poly – MEMS 製程 ... 26 4.2 共振頻率量測 ... 27 4.3 結構尺寸量測 ... 28第五章 研究結果
5.1 感測電路模擬結果 ... 29 5.2 點對稱配置與線對稱配置 ... 30 5.2.1 實際量測結果 ... 30 5.2.2 模擬結果與實際量測之比較 ... 32 5.3 螺旋式彈簧與蜿蜒式彈簧模擬結果 ... 34 5.3.1 彈簧係數 ... 34 5.3.2 所佔面積 ... 36 5.3.3 旋轉共振模態之影響 ... 37 5.3.4 帄面耦合度... 39第六章 結論
6.1 總結 ... 41 6.1.1 感測電路模擬 ... 41 6.1.2 點對稱懸吊配置 ... 41 6.1.3 螺旋式彈簧... 41 6.2 未來工作 ... 42 6.2.1 設計 ... 42 6.2.2 量測 ... 42 參考文獻 ... 43表次
表 1-1 加速度計感測原理比較 ... 7 表 5-1 實際量測共振頻率... 32 表 5-2 實際彈簧雙軸 K 值與差值 ... 33 表 5-3 模擬共振頻率 ... 33 表 5-4 模擬彈簧雙軸 K 值與差值 ... 33 表 5-5 蜿蜒式彈簧模擬共振頻率 ... 34 表 5-6 蜿蜒式彈簧模擬共振頻率 ... 35 表 5-7 蜿蜒式彈簧 K 值... 35 表 5-8 螺旋式彈簧 K 值... 35 表 5-9 蜿蜒式彈簧所佔面積 ... 36 表 5-10 螺旋式彈簧所佔面積 ... 36 表 5-11 蜿蜒式彈簧旋轉共振模態之頻率 ... 38 表 5-12 螺旋式彈簧旋轉共振模態之頻率 ... 38 表 5-13 蜿蜒式彈簧之帄面耦合度 ... 40 表 5-14 螺旋式彈簧之帄面耦合度 ... 40圖次
圖 1-1 2004 年與 2009 年全球 MEMS 產度... 2 圖 1-2 2006~2011 年全球慣性感測器市場產值分析度 ... 2 圖 1-3 加速度計操作原理... 3 圖 1-4 加速度計感測流程... 4 圖 1-5 壓阻式加速度計[2] ... 5 圖 1-6 熱氣泡式加速度計[3] ... 6 圖 1-7 電容式加速度計 ADXL 50 [4] ... 6 圖 1-8 (a)上下型差動對 (b)左右型差動對 ... 8 圖 1-9 左右型差動對無法正確判讀加速度值 ... 9 圖 1-10 改變固定位置消除元件翹曲影響 ... 9 圖 1-11 差動對電容感測示意圖 ... 10 圖 1-12 懸臂樑型電容式加速度計[6] ... 11 圖 1-13 方型電容式加速度計[7] ... 12 圖 1-14 蜿蜒型電容式加速度計[8] ... 13 圖 1-15 線對稱彈簧配置示意圖 ... 14 圖 1-16 點對稱彈簧配置示意圖 ... 14 圖 1-17 點對稱與線對稱配置 K 值公式解析 ... 15 圖 1-18 概念設計 ... 16圖 2-1 電容式感測電路示意圖[12] ... 18 圖 2-2 同步解調原理示意圖[12] ... 18 圖 3-1 蜿蜒彈簧理論公式之長度定義[13] ... 19 圖 3-2 製程誤差示意圖 ... 20 圖 3-3 線對稱彈簧配置網格圖 ... 22 圖 3-4 線對稱彈簧配置 ANSYS 共振模態 ... 23 圖 3-5 點對稱彈簧配置網格圖 ... 23 圖 3-6 蜿蜒彈簧網格圖 ... 25 圖 3-7 蜿蜒彈簧共振旋轉模態圖 ... 25 圖 4-1 Poly – MEMS 製程示意圖 ... 26 圖 4-2 微機電系統動態分析儀[11] ... 27 圖 4-3 MMA 量測結果圖 ... 27 圖 4-4 電子式掃描顯微鏡 SEM ... 28 圖 4-5 SEM 所擷取之照片 ... 28 圖 5-1 Labview 軟體模擬解調電路 ... 29 圖 5-2 (a)線對稱配置彈簧寬度 2.0um ... 30 (b)點對稱配置彈簧寬度 2.0um ... 30 圖 5-3 線對稱配置彈簧寬度 2.2um ... 31
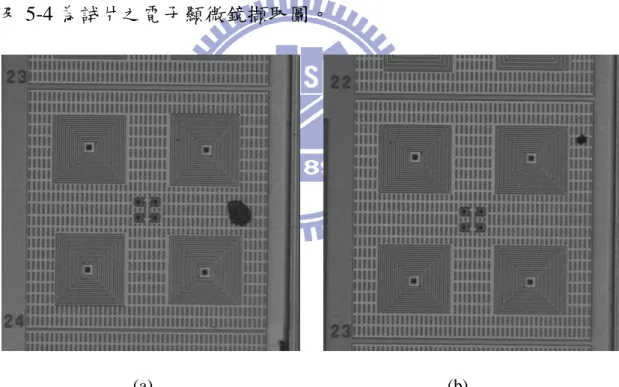
圖 5-4 (a)線對稱配置彈簧寬度 2.4um ... 31 (b)點對稱配置彈簧寬度 2.4um ... 31 圖 5-5 電子掃描顯微鏡 SEM 量測 ... 32 圖 5-6 點對稱配置與線對稱配置之製程誤差 ... 34 圖 5-7 螺旋式與蜿蜒式彈簧 Z 軸 K 值之比較 ... 35 圖 5-8 蜿蜒式與螺旋式彈簧所佔面積之比較 ... 37 圖 5-9 彈簧位置與質量塊中心之距離示意圖 ... 38 圖 5-10 蜿蜒式彈簧旋轉共振頻率與彈簧位置之變化 ... 38 圖 5-11 螺旋式彈簧旋轉共振頻率與彈簧位置之變化 ... 39 圖 5-12 蜿蜒式與螺旋式帄面耦合度 ... 40
第一章 序論
1.1 研究背景與動機
近年來,台灣隨著半導體產業的蓬勃發展,素來有著「半導體王 國」的美譽,但是隨著科技的發展,純粹的電子產品已經越來越不符 合「人機互動」的需求,人們開始嘗試著將各種生活中常見的物理量 (如:壓力、熱、加速度等)與電子元件作結合,因此隨之發展而出的微 機電系統(MEMS)近年來越來越倍受重視,其藉由發展多年的半導體 製程技術,結合其中的沉積、微影、蝕刻等三種技術,以製作出各種 微米尺寸的可動式機械元件,並且隨著尺寸的縮小,製作成本也隨之 下降,使其在市場上極有發展潛力。 而微機電產品中,又以各類慣性感測器如微加速度計、微陀螺儀 等最早開始進入研究課題,從早期應用在軍事上的飛彈定位導航系統 到汽車上的安全氣囊,一直到近年來開始廣泛的應用到如手機、電子 相框等各種消費性電子產品,促使台灣各大產業也開始密切注意; 如 圖1-1所示,市場研究機構 Yole Development [1]預估,MEMS元件在 消費性電子市場的應用產值,將由2004年的6%,大幅增長至2009年 的22%,而主要成長的動力來源,將來自大尺寸高畫質電視、高密度 儲存系統讀寫頭保護,以及手機等行動裝置三大應用。前者將持續擴大數位微鏡裝置的市場規模,而後兩者,則將帶動慣性感測元件的龐 大需求,Yole指出,2006~2011年,全球慣性感測器市場年複合成長 率高達35%,而至2011年時,慣性感測器市場總產值將高達10億美元 以上(如圖1-2所示)。其中可以看出,慣性感測器市場仍然不斷在成長, 因此我也將我的研究動機定在了微加速度計之上。 圖1-1 2004年與2009年全球MEMS產值(依應用市場區分)[1] 圖 1-2 2006~2011 年全球慣性感測器市場產值分析[1] 微加速度感測器從早期的單軸加速度感測,漸漸發展出近期的雙 軸感測以及近幾年推出的三軸感測,其中,隨著軸向的增加感測電路
也更趨近複雜,軸與軸之間訊號之相互影響、耦合的問題也成了重要 的研究課題,然而,藉由感測電路處理其訊號並修正的方式也隨著發 展而漸漸陷入瓶頸,因此,追本溯源地回到機械懸吊結構上做修正, 使得原始機械訊號誤差減少之方式也開始重新被正視。
1.2 文獻回顧
1.2.1 加速度計操作原理 圖 1-3 加速度計操作原理 如上圖所示為一帶有阻尼的質塊運動系統,當此質量塊受到一 外在加速度時,其運動式與質量、彈簧、阻尼有關,可表示如下;其 中 m 為質量塊的質量(kg),b 為系統等效阻尼(N/(ms-1)),k 為懸吊系 統的彈簧常數(N/m)。 mxcxkxmaexternal . .. (式 1-1) 透過 Laplace Transform 將此運動式表示成; 2 0 0 2 1 ) ( ) ( Q s s s A s X (式 1-2) 其中系統共振頻率 m k 0 ,Quality Factor ,與系統阻尼質量塊、共振頻率有關,當系統工作頻率遠小於共振頻率時可推得質量塊位移量 0 a x ,由此式可看出系統受到加速度時,與其造成的位移成正比的 關係,藉由此位移變化造成的電容、電阻或溫度的改變,經由電性的 輸出來判斷外在環境給予加速度的大小,其感測流程如(圖 1-4)所示, 此加速度透過質量塊轉換成慣性力(F=ma),再經由懸吊系統轉換成位 移變化(x=F/k),此位移變化帶動其餘參數的改變,最後藉由電路將此 改變量讀出,完成加速度計的感測。 圖 1-4 加速度計感測流程 1.2.2 加速度計感測方式 現今市面上加速度計所使用的感測方法主要分為壓阻式、熱汽泡 式及電容式三種,分別將不同的物理量轉換成可讀出的電子訊號,各 感測原理簡述如下; (1) 壓阻式: 如圖 1-5 為壓阻式加速度計[2],當系統受到外在加速度時,透過
懸吊系統(此範例為一懸臂)質量塊因慣性力產生位移,造成彈簧上的 應變,此懸吊系統造成的應力,導致電阻產升R的變化,而透過惠 斯同電橋等簡易感測電路,可將電阻的變化讀出相對應的電壓值,此 感測方式最大優點在於不需過於複雜的結構及電路便可同時量測三 軸的加速度。 圖 1-5 壓阻式加速度計[2] (2) 熱汽泡式 熱汽泡式加速度計是近年來很新的概念,如(圖六)為清華大學 Bruce 在 2006 年提出的熱汽泡式加速度計[3],其利用加熱流體,產 生一氣泡當作虛擬質量塊,當系統收到帄面上的加速度時,氣泡產生 傾斜倒向兩旁的加熱器(heater),造成熱傳環境的改變,使流體在不同 的區塊有相對的溫度差,藉由讀取溫度的改變可得到相對應的加速度 值,其感測優點在於無質量塊的存在,不需額外的後製程來釋放機械 可動結構,但其需加熱的特性造成需要較大的操作電流,與一般的電 路不相容,且氣泡的頻率響應極差,只能達到數十赫茲,對溫度敏感;
而這些限制,也讓此感測原理目前較難成功的打入市場。 圖 1-6 熱氣泡式加速度計[3] (3) 電容式 圖 1-7 電容式加速度計 ADXL 50 [4] 如圖 1-7 所示為 ADI 在 1994 年發展的電容式加速度計 ADXL 50, 當系統受到加速度時,中間的感測質量塊會因慣性力(F ma),透過 懸臂彈簧帶動兩旁梳狀結構的移動,使帄行電容板的間距產生變化, 利用不同的電容值來得到相對應的量測訊號(電壓值),藉以判讀加速 度的大小。電容式加速度計是目前市面上最常見的感測方法,此感測 方式較不受外在環境因素影響、且具有高頻寬的優點,但由於電容變
化量極小,往往需較複雜的感測電路來做去除雜訊、同步解調的工作。 設計與製作的複雜度也較其餘兩種感測方式來得高。 綜合上面所述三種感測方式,謹以表 1-1 來作簡單比較。 表 1-1 加速度計感測原理比較表 從上表可看出壓阻式與電容式相較於熱氣泡式的優勢,而壓阻式 與電容式都可以有不錯的工作頻寬與靈敏度,但電容式有一較大的優 點在於其不像壓阻式有感測電阻的存在,大幅降低了雜訊的程度,具 有更好的解析度,故綜合上述的優點,此次研究選定電容式加速度計 為發展主軸。 1.2.3 電容式差動對 電容式差動對為最常見的感測方法,由 Rudolf 在 1990 年提出[5],其 可以消除共模的訊號(Common Mode),減少外界環境如溫度、製程變 壓阻式 熱氣泡式 電容式 靈敏度 ~ 200 mV/G 0.9 ℃ /G ~1000 mV/G 工作頻寬 高 ~ 1 kHz 低 < 30 Hz 高 ~ 3 kHz 受環境影響 低(惠斯同電橋) 高(對溫度敏感) 低(差動對感測) CMOS 相容性 高 (結構、電路簡單) 低 高 (結構、電路複雜) 解析度 ~ 100 mg/√Hz ~ 1 mg/√Hz ~ 0.2 mg/√Hz
異的影響,也可提升訊號兩倍,大致可以分為兩種,上下型與左右型 如圖 1-8(a)(b)。 (a) (b) 圖 1-8(a) 上下型差動對(b)左右型差動對 結構移動的距離與電容的變化的關係式可以表示成 上下型 (當 Δx<<d) (式 1-3) 左右型 (式 1-4) 左右型相較於上下型有完全線性的優勢、且同樣的 Finger 配置數 目,左右型具有較多的等效感測對(如圖 1-8),但在 CMOS-MEMS 中 2 2 2 2 2 d x A d d x A C x d t x 2
仍多採用上下型差動對,主因為 CMOS 製程受限於各層材料的不同, 且熱膨脹係數差異過大,容易導致元件翹曲而無法使感測面積與加速 度有相關且正確的趨勢,從而無法從感測電容上作判讀,如圖 1-9。 圖 1-9 左右型差動對無法正確判讀加速度值 並且我們發現,若是將固定位置改變,就可以盡可能減少上下式電容 對因為翹曲而造成的影響,但是左右式卻無法利用此種方式解決,如 圖 1-10 所示,因此還是決定使用上下式作為主要之感測方式。 圖 1-10 改變固定位置消除元件翹曲影響
在選用上下型差動對後,其推導公式如下;假設忽略掉微弱的 邊緣效應(fringing effect),即電荷會在邊緣部份不均勻的分布現象, 電容可表示成 d A C r0 ,假設質量塊受一加速度時,產生一微小位 移量x,C1與C2為下圖中兩個相鄰電容,則此微小位移量的變化將 造成 x d A C1r0 , x d A C r 0 2 ,則量測到的電容差 2 2 0 2 1 2 x d x A C C C r 2 2 0 0 2 C d r A x C x (式 1-5) 把較小的 2 x C 省略掉,可以得到 C d x r 0 2 2 (式 1-6) 故所量測到的加速度 a; C m d k m x k m F a r s s 0 2 2 (式 1-7) 此式可看出加速度與電容變化的線性關係,藉由感測電路量測電容變 化,來得到加速度的值。 圖 1-11 差動對電容感測示意圖
1.2.4 懸吊結構 對於雙軸加速度計之懸吊結構來說,基本要求就是 X 軸與 Y 軸 之彈簧係數必頇相同,才能夠達到「解耦帄均」,解耦帄均就是假設 加速度計受到一帄面上與加速度計呈 45 度角之加速度時,X 軸與 Y 軸感測部分應會反映出相同大小之訊號,但若是 X 軸與 Y 軸彈簧 K 值不同,受到加速度後其中質量塊之位移受到彈簧 K 值影響(虎克定 律 F=kx)而產生X、Y不同位移,也就因此而得到不同之輸出訊號。 由此可見懸吊系統在加速度計中也占有一很重要之位置,若是與感測 修正回饋電路相互配合,就更能如虎添翼。 在搜尋以及瀏覽過許多論文以及專利之後,將列出三個較有代表 性之懸吊結構的加速度計,其餘懸吊結構大體都是從這些懸吊結構所 變化而出 (1) 懸臂樑式懸吊結構 圖 1-12 懸臂樑型電容式加速度計[6] 上圖 1-12 為一德國公司 Siemens Aktiengesellschaft 在 1995 年所
通過之美國專利[6],也是單軸微加速度計之基本型態,其所使用之 懸吊結構為懸臂樑型之等效彈簧,由於其結構簡單,因此在設計上有 著調整簡單之優點,但是在同樣彈簧係數的條件下,其所利用之晶片 面積不佳,在 MEMS 產業寸土寸金的條件下,很快被其他形式之彈 簧所取代。 (2) 方型懸吊結構 圖 1-13 方型電容式加速度計[7] 上圖 1-13 為一美國佛羅里達大學學生 Huika Xie 在其指導教授 Gary K. Fedder 帶領下在 Nanotech 2003 上的論文以及 2007 年申請通 過之美國專利[7]。其設計所用之懸吊結構類似數個方型結構串連而 成,故此稱為方型結構,此方型結構比起懸臂樑結構能夠在同樣的彈 簧係數 K 值情況下,占比較少之面積,並且為了使彈簧係數 kx = ky, 其將彈簧方向配置成與帄面 XY 軸呈 45 度角,但是此種配置方式會
使得旋轉之共振頻率過低,導致其容易產生旋轉並與直線運動耦合, 而使得訊號產生誤差。
(3) 蜿蜒型懸吊結構
圖 1-14 蜿蜒型電容式加速度計[8]
上圖 1-14 為 Analog Device Inc.公司在 2006 年所發表之美國專利 設計,名稱為 ADXL203,左邊之圖為懸吊結構之放大圖,如圖所示, 此設計之懸吊結構充分的利用所占之面積,並且其利用串聯的方式達 成雙軸加速度計懸吊系統 kx = ky 之條件,使其能夠解耦帄均,但是 其缺點卻很容易由於製程誤差之影響而造成kx ≠ ky,而造成這項缺 點之原因就是其整體設計之彈簧配置並沒有完全對稱。 1.2.5 彈簧對稱配置 為了使彈簧不受到製程誤差之影響而導致解耦不帄均,必頇使彈 簧係數 kx = ky,而目前市面上整合型雙軸加速度計之彈簧配置的方 式都是使用串聯的方式達到此目的,我們將之稱為「線對稱懸吊配置」。
如圖 1-15 所示, 若是將此種線對稱配置之結構旋轉 90 度之後,將 會不同於原本之結構。
圖 1- 15 線對稱彈簧配置示意圖[8]
圖 1-16 點對稱配置彈簧示意圖[9]
圖 1-16 為 Analog Device Inc.公司在 2001 年所發表之美國專利[9], 其配置方式則是屬於「點對稱」懸吊配置,如示意圖所示,其結構在 旋轉 90 度之後圖型配置仍然完全相同,表示其在 X 軸與 Y 軸上完全 對稱,因此即使受到製程誤差等影響,其雙軸彈簧 K 值仍然會維持 相同。
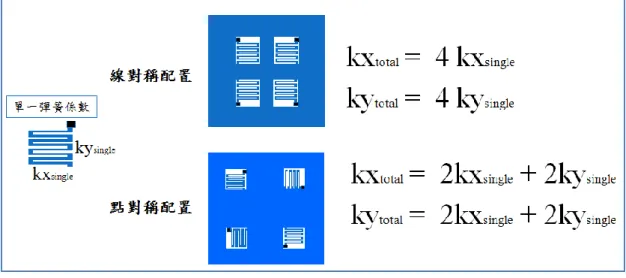
圖 1-17 點對稱與線對稱配置 K 值公式解析
進一步從公式來看,如圖 1-17,假設單一彈簧之 X 軸與 Y 軸 K
值分別為 kxsingle和 kysingle,然而由於彈簧串聯之後,線對稱配置之整
體彈簧 kxtotal為 4 倍 kxsingle,而 kytotal則為 4 倍 kysingle。因此,當因為
製程誤差等影響使得單一彈簧之 K 值 kxsingle和 kysingle不相等時,也會
導致整體彈簧之 kxtotal和 kytotal不相等,從而導致兩軸輸出訊號不相同。
而點對稱配置之整體彈簧 kxtotal為 2 倍 kxsingle與 2 倍 kysingle相加,kytotal
也是 2 倍 kxsingle與 2 倍 kysingle相加,因此即時製程誤差等影響兩軸單
1.3 研究目標
本論文研究重點在微加速計的懸吊結構方面的研究,並且主要將 針對點對稱彈簧配置上作進一步的驗證,並且將會從各方面探討各種 參數對其彈簧係數之關係,使微加速度計之靈敏度以及結構上之誤差 能夠相應的減少,達到優化的效果。首先會進一步製作實驗試片證明, 點對稱懸吊配置能夠使得帄面雙軸之彈簧係數即使受到製程尺寸誤 差的影響,仍然保持相同,並同時與模擬結果作比較。而後將提出的 一種新型螺旋式懸吊結構,與現今市面上最常使用之蜿蜒式彈簧,在 各方面相互比較優缺,瞭解此種新式彈簧之可用性以及適合使用之情 形。
1.4 概念設計
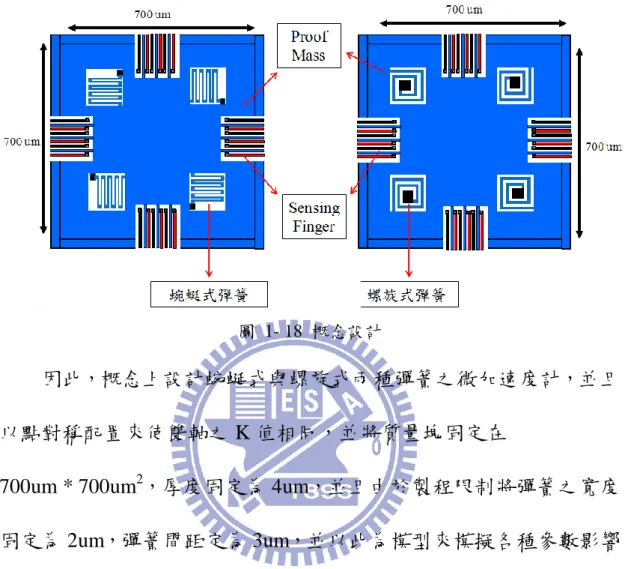
圖 1- 18 概念設計
因此,概念上設計蜿蜒式與螺旋式兩種彈簧之微加速度計,並且 以點對稱配置來使雙軸之 K 值相同,並將質量塊固定在
700um * 700um2,厚度固定為 4um,並且由於製程限制將彈簧之寬度
固定為 2um,彈簧間距定為 3um,並以此為模型來模擬各種參數影響 彈簧 K 值之情形。
第二章 電容式加速度計之感測電路模擬
2.1 電容式感測電路原理
圖 2-1 電容式感測電路示意圖[12] 如上圖 2-1 所示,將加速度計感測部份簡化成 C1 與 C2 兩電容, 並給予一載波與反向器,使得訊號為兩倍電容改變量,而後當感測器 受到外在加速度時,電容輸出之載波振幅則會隨著加速度大小而變化, 之後經過同步解調電路,解調出加速度之變化曲線即為所要之輸出。2.2 同步解調原理
假設一調變波形 A(t)cos(ωt),A(t)是隨著時間改變之振幅,即加 速度之變化波形,而後將之乘上一個相同頻率之參考弦波, B cos(ωt+θ),θ為相位漂移,可以得到: (式 2-1) [12] 而後設置一適當之低通濾波器,將 2ω部份過濾,可以得到 A(t)Bcos θ,即為 A(t)之比例變化波形。 圖 2-2 同步解調原理示意圖[12]第三章 懸吊結構模擬方法
3.1 蜿蜒彈簧理論公式
圖 3-1 蜿蜒彈簧理論公式之長度定義[13] 由 Fedder 博士[13]所提出之公式,其中 n 為彈簧之彎折數,偶數 n 之 公式 3-1 為: (式 3-1)下式為奇數公式 3-2: (式 3-2) 而後將會進行理論值與模擬彈簧 K 值之比較。
3.2
ANSYS 模擬
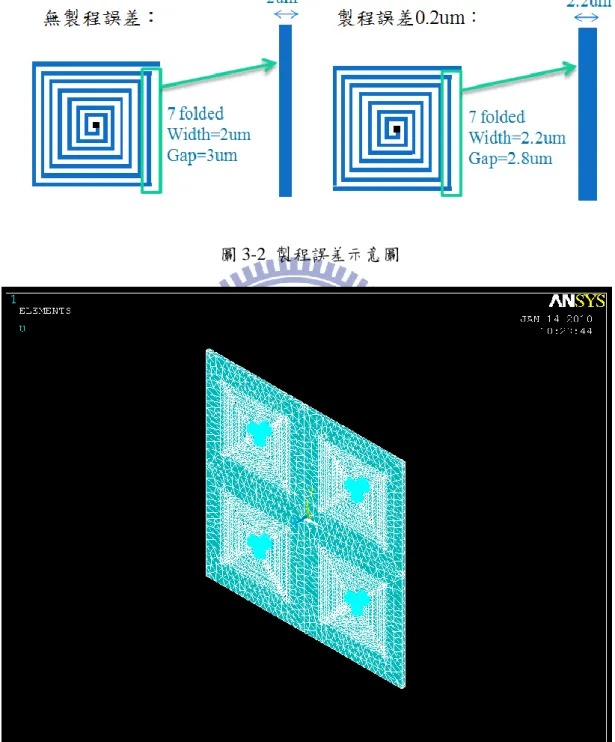
在瞭解理論推導之後,發覺理論中並沒有考慮到在動態變形之後, 所改變之幾何因素,因此更進一步使用有限元素軟體 ANSYS 來進行 下一步之彈簧 K 值推導估測。模擬部份主要分為三種方式,分別為 共振模擬以及加速度模擬,共振模擬主要是利用共振方式觀察其共振 模態以及擷取其中之共振頻率,並且用 公式推算其彈簧 K 值;而加速度模擬則是給予 Y 軸方向 3G 之加速度,觀察此時 Y 軸 與 X 軸之位移量,計算其帄面耦合度。 3.2.1 點對稱配置與線對稱配置 此模擬將以新型之螺旋式彈簧,分別以點對稱配置以及線對稱配 置作為設計,以相同之彈簧但分別設計 3 種不同之製程誤差,分別為m
k
2
無誤差、0.2、0.4um 三種誤差,如圖 3-2 所示,瞭解在製程誤差下點 對稱配置與線對稱配置彈簧 K 值之影響
圖 3-2 製程誤差示意圖
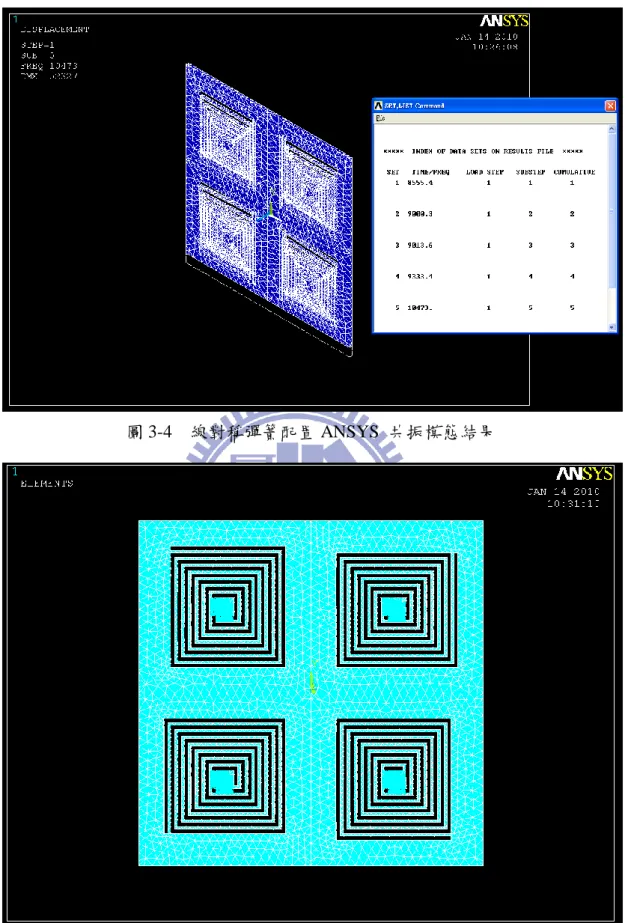
圖 3-4 線對稱彈簧配置 ANSYS 共振模態結果
3.2.2 蜿蜒式與螺旋式彈簧
蜿蜒式與螺旋式彈簧主要從 4 個方面去作比較,分別是(1)三軸 彈簧 K 值變化(2)所佔面積(3)旋轉模態之共振頻率(4)帄面耦合度;此
模擬都將固定整體結構於 700*700um2並因應製程固定彈簧之寬度
2um 彈簧間距 3um 整體結構厚度 4um。 (1)三軸彈簧 K 值 本模擬將分別改變蜿蜒式彈簧之彎折數以及螺旋式彈簧之圈數, 瞭解其彈簧 K 值變化之情形。 (2)所佔面積 由於整體大小固定,故若彈簧所佔面積越小,有效質量塊就越大 ,從而導致靈敏度提高。因此本模擬將分別瞭解蜿蜒式彈簧以及螺旋 式彈簧在不同 K 值時所佔之面積。 (3)旋轉模態之共振頻率 在旋轉共振模態時之共振頻率,藉由 的概念,可以 視為旋轉方向等效 K 值之指標,為了避免旋轉情形出現而導致感測 誤差,必頇找出提昇旋轉共振模態時之共振頻率之方法,並使得旋轉 模態發生在直線模態之後,減少量測之誤差。因此本模擬將探討旋轉 共振頻率與彈簧位置的關係。 (4)帄面耦合度
m
k
2
此模擬為給予加速度之模擬,在給予 Y 軸方向 3G 之加速度,將此時 Y 軸與 X 軸之位移量相除可得計算其帄面耦合度 C,代表當有 Y 軸 之訊號時,X 軸所產生之誤差訊號比例。
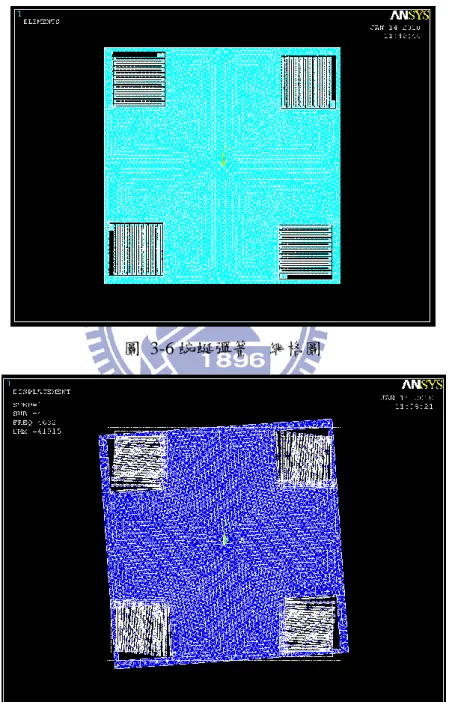
圖 3-6 蜿蜒彈簧 網格圖
第四章 製程規劃與量測
本章節中將會提到所使用之製程以及製程中所包涵之材料,以及製 程當中所限制線寬以及各種尺度,並且介紹量測試片中加速度計元件 之共振頻率量測方式,並介紹所使用量測元件尺度之儀器。4.1 Poly – MEMS 製程
圖 4-1 Poly – MEMS 製程示意圖 此製程為外包公司廠商代工之製程,其中主要結構材料為 Poly Silicon,並且以 Nitride 作為 MEMS 部份絕緣層以及電路部份之保護 層,懸浮結構厚度為 4um ,並懸浮離底面 2um。紅色虛線中間為阻 隔區,使得 MEMS 製程與電路部份製程得以分開,互不干擾。此製 成為初步設計,電路與 MEMS 兩部份製程只能分開做出,尚未能使 兩部份製程同時做出,並且晶片面積有限。4.2 共振頻率量測
圖 4-2 微機電系統動態分析儀(MEMS Motion Analyzer, MMA)[11]
共振頻率之量測將使用國家晶片中心(CIC)[11]所提供之微機電 系統動態分析儀(MEMS Motion Analyzer, MMA)圖 4-2,其藉由一壓 電帄面致動器來激振試片,再利用 CCD 做影像擷取,並由電腦在掃頻 之同時計算出其影像位移量,並跑出結構之頻率響應,如圖 4-3 所示, 其中最大位移(縱軸)之點即為共振頻率 ,並可藉由相位改變作確認。 而藉由所得之共振頻率,我們進而可以推算懸吊系統的彈簧 K 值,並 與模擬值做相互驗證。 圖 4-3 MMA 量測結果圖
4.3 結構尺寸量測
結構尺寸量測方面將使用自身實驗室所提供之掃描式電子顯微 鏡(SEM),其大致原理為電子束與試片作用產生二次電子的激發,在 逐點掃描並經收集放大後形成之影像。 圖 4-4 電子式掃描顯微鏡 SEM 圖 4-5 SEM 所擷取之照片第五章 研究結果
5.1 感測電路模擬結果
圖 5-1 Labview 軟體模擬解調電路 圖 5-1 為 Labview 模擬解調電路之結果,圖中黃色波形部份為加 速度變化之波形,即訊號波,中間波形圖為載波與訊號波調變之後所 形成之調變波型;而最後為經過 Labview 軟體之模擬電路處理後之電 路解調波,可以看到除了稍有延遲之外,整體波形幾近相等,可以說 模擬之結果極為成功。5.2 點對稱配置與線對稱配置
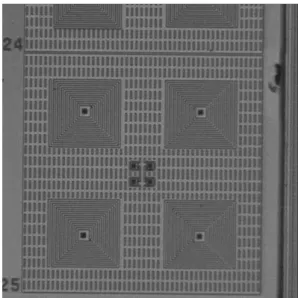
5.2.1 實際量測結果 實際試片中以新型之螺旋式彈簧,分別以點對稱配置以及線對稱 配置作為設計,以相同之彈簧但分別設計 3 種不同之製程誤差,分別 為無誤差、0.2、0.4um 三種誤差,如同先前文中所提之模擬方式,故 彈簧分為三種設計寬度,2.0um、2.2um 以及 2.4um,但由於晶片製作 面積有限,因此缺少點對稱彈簧 2.2um 寬度之部份。圖 5-2、5-3 以 及 5-4 為試片之電子顯微鏡擷取圖。 (a) (b)圖 5-3 線對稱配置 彈簧寬度 2.2um
(a) (b)
圖 5-5 電子掃描顯微鏡 SEM 量測 圖 5-5 為 SEM 之量測結果,以此得知所有製作試片之彈簧寬度 後,由於製程之誤差,導致實際量測與設計寬度略有不同,重新將量 測寬度代入 ANSYS 模擬後相互比較後如表 5-2,同時將 MMA 量測 出之共振頻率推算出試片之彈簧 K 值如表 5-1,而後將兩數據相互比 較之後繪圖如圖 5-6。 5.2.2 模擬結果與實際量測之比較 表 5-1 實際量測共振頻率
實際量測共振頻率 1.77um(2um) 1.95um(2.2um) 2.2um 2.4um)
點對稱式 X 軸 f 9200 - 12300 Y 軸 f 9200 - 12300 線對稱式 X 軸 f 9400 11000 12700 Y 軸 f 9000 10400 12000
表 5-2 實際彈簧雙軸 K 值與差值
表 5-4 模擬共振頻率
表 5-5 模擬彈簧雙軸 K 值與差值
ANSYS 模擬共振頻率 1.77um (2um) 1.95um
(2.2um) 2.2um (2.4um)
點對稱式 X 軸 f 11351 12236 14406 Y 軸 f 11351 12236 14406 線對稱式 X 軸 f 11090 12375 14531 Y 軸 f 10473 11687 13725
圖 5-6 點對稱配置與線對稱配置之製程誤差 由上圖 5-6 可以看出,無論是實際量測或是 ANSYS 模擬之值都 顯示出,線對稱彈簧配置都會由於製程誤差之關係使得兩軸之彈簧係 數相差越來越大,然而點對稱彈簧配置則完全不受製程誤差影響,兩 軸之彈簧 K 值仍然維持相同。
5.3 螺旋式彈簧與蜿蜒式彈簧模擬結果
5.3.1 彈簧係數 表 5-6 蜿蜒式彈簧模擬共振頻率 蜿蜒式 21N 20N 19N 18N 17N 16N 14N X 軸 f 3471 3840 4288.7 4730.4 5289.1 5954.1 7727.9 Y 軸 f 3471 3840 4288.7 4730.4 5289.1 5957.1 7727.9 Z 軸 f 3493.5 3974 4231.6 4659.8 5201.7 5840.3 7575.8表 5-6 蜿蜒式彈簧模擬共振頻率
表 5-7 蜿蜒式彈簧 K 值
表 5-8 螺旋式彈簧 K 值
圖 5-7 螺旋式與蜿蜒式彈簧 Z 軸 K 值之比較
螺旋式 9 fold 8 fold 7fold 6fold 5fold X 軸 f 3406.8 4099.2 5059.7 6442 8535.3 Y 軸 f 3406.8 4099.2 5059.8 6442 8535.3 Z 軸 f 2996.9 3603.1 4442 5646.4 7466
由表 5-3 以及表 5-4 中可以得知由於使用點對稱彈簧配置,X 軸 與 Y 軸之彈簧 K 值完全相等,更進一步可以從圖 5-7 中看出,在相 同帄面 K 值下,螺旋式彈簧之 Z 軸 K 值明顯要比蜿蜒式彈簧小很多, 表示當受到同樣外在加速度時,螺旋式彈簧 Z 軸位移會較大,並且導 致 Z 軸訊號輸出較大,也就是其 Z 軸靈敏度較大。 5.3.2 所佔面積 表 5-9 蜿蜒式彈簧所佔面積 表 5-10 螺旋式彈簧所佔面積 蜿蜒式 21N 20N 19N 18N 17N 16N 14N 彈簧 K 值 1.02 1.25 1.57 1.94 2.44 3.16 5.37 面積 um2 11858 11322 10918 9898 9393 8010 6318
螺旋式 9 fold 8 fold 7fold 6fold 5fold
彈簧 K 值 0.98 1.46 2.27 3.75 6.69
圖 5-8 蜿蜒式與螺旋式彈簧所佔面積之比較 由於微加速度計元件整體大小固定,因此當彈簧所佔面積越小, 有效質量塊就越大,而當同樣外在加速度作用在相同 K 值之不同元 件時,有效質量塊較大之元件位移較大,從而使得輸出訊號較大並導 致靈敏度較高。而如圖 5-8 所示,螺旋式彈簧在同樣的帄面 K 值下, 所佔的面積較小, 因此其有效質量塊較大,並且整體靈敏度較高。 5.3.3 旋轉共振模態之影響 在多次的嘗試當中,發現改變彈簧位置與質量塊中心之距離,如 圖 5-9 所示,影響旋轉共振模態之頻率最大,故以此為變因去作 ANSYS 模擬,觀察其旋轉共振模態順序變化之情形。
圖 5-9 彈簧位置與質量塊中心之距離 示意圖 表 5-10 蜿蜒式彈簧旋轉共振模態之頻率
表 5-11 螺旋式彈簧旋轉共振模態之頻率
螺旋 7fold 30um 50um 70um 90um 110um 130um 直線共振頻 X 軸 rotate f 2473.3 3032.8 3631.1 4266.3 4940.6 5661.2 5059.8 Y 軸 rotate f 2473.3 3032.8 3631.1 4266.3 4940.6 5661.2 5059.8 Z 軸 rotate f 2536.6 3221.7 3935.4 4680.5 5464.3 6298.5 4442
圖 5-10 蜿蜒式彈簧旋轉共振頻率與彈簧位置之變化
蜿蜒 17N 30um 50um 70um 90um 110um 130um 直線共振頻 X 軸 rotate f 2705.9 3349 4041.1 4780.9 5573.6 6424.9 5279.2 Y 軸 rotate f 2705.6 3349.6 4041.1 4780.9 5574 6424.9 5279.2 Z 軸 rotate f 2417.9 3126.7 3869.3 4633.7 5450.6 6425.6 5199
圖 5-11 螺旋式彈簧旋轉共振頻率與彈簧位置之變化 從圖 5-10 以及 5-11 當中可以發現,蜿蜒式彈簧離中心 100um 之 後,旋轉共振頻率就超越了直線共振頻率,而螺旋式彈簧則需要達到 115um 之後,表示螺旋式彈簧較容易出現旋轉之情形。 5.3.4 帄面耦合度 此模擬給予 Y 軸方向 3G 之加速度,將此時 Y 軸與 X 軸之位移 量相除可得計算其帄面耦合度 C, 即 由表 5-12、5-13 以及圖 5-12 可以看出,螺旋式較蜿蜒式彈簧帄 面耦合度小很多,表示螺旋式彈簧所產生之誤差訊號比蜿蜒式彈簧 小。
表 5-12 蜿蜒式彈簧之帄面耦合度
蜿蜒式 16N 17N 18N 19N 21N
X 位移 1.46E-09 2.11E-09 2.79E-09 3.25E-09 4.81E-09
Y 位移 2.07E-08 2.69E-08 3.35E-08 4.10E-08 6.05E-08
C (%) 7.05314 7.843866 8.328358 7.926829 7.950413
彈簧 k 值 3.165 2.4476 1.9482 1.5761 1.06
表 5-13 蜿蜒式彈簧之帄面耦合度
螺旋式 6 fold 7 fold 8 fold 9 fold X 位移 1.43E-09 1.63E-09 2.06E-09 3.48E-09
Y 位移 6.14E-08 1.67E-07 1.29E-07 1.70E-07
C (%) 2.325733 0.97599 1.599379 2.047059
彈簧 k 值 3.7565 2.277 1.4654 0.9898
圖 5-12 蜿蜒式與螺旋式帄面耦合度
第六章 結論
6.1 總結
以下將會將總結分為三個部份,分別為感測電路模擬、點對稱懸 吊配置以及螺旋式彈簧。 6.1.1 感測電路模擬 所撰寫之 Labview 程式成功的利用所理解之解調原理將模擬訊 號解調,並且打算更進一步的利用製程做出微加速度計元件,以便嘗 試對真實之訊號波進行解調。 6.1.2 點對稱懸吊配置 成功的從 ANSYS 軟體模擬以及實際量測兩方面證明點對稱式懸 吊可以不受製程影響,使帄面兩軸之彈簧係數維持相等,代表雙軸之 靈敏度相等,減少結構訊號誤差以及電性修正之麻煩。 6.1.3 螺旋式彈簧 關於螺旋式彈簧與蜿蜒式彈簧相互比較之結論,可以分為 4 點: 1. 相同帄面 K 值下,螺旋式彈簧之 Z 軸 K 值較小 ,即表示 Z 軸 靈敏度較高。 2. 相同帄面 K 值下,螺旋式彈簧所占面積較小,表示整體靈敏度 較高。3. 螺旋式彈簧較容易出現旋轉情形,但可以藉由調整彈簧位置避 免此情形發生 。 4. 螺旋式彈簧之帄面耦合度較小。
6.2 未來工作
6.2.1 設計 1. 將會利用製程將所模擬元件之各種尺寸如實做出,並利用量測機 台量測其共振頻率且推算彈簧 K 值,再與模擬值作比較,看是否可 以得到相同之結論,並修正模擬各種相關參數,以其之後能做出正確 之模擬。 2. 依照感測電路原理設計電路,並將之與加速度計結構元件部份嘗 試作結合,可能很大部份必頇克服製程方面之因素,必頇將電路製程 與 MEMS 懸浮結構製程相互作結合。 6.2.2 量測 在內建電路成功之前,將會繼續進行微加速計元件結構體的訊號 量測,這部分可能採用兩方面,一方面使用 Labview 軟體繼續作解調 電路方面,嘗試將實體訊號擷取,另一方面也可能會使用 MC1496 乘法器 IC 來做實體解調電路並量測結構輸出之電性。並且在整合電 路製作後,則會量測產品的幾項電性參數,例如:靈敏度、耦合度、 非線性度、解析度、雜訊梯度、動態範圍等。參考文獻
[1] Yole Development, http://www.yole.fr/
[2] Gregory D. Swanson, Delco Electronics Corporation,”
PIEZORESISTIVE FORCE REBALLANCE ACCELEROMETER” US patent No. 5596144 , filed 1997.01.21
[3] Ke-Min Liao, Rongshun Chen, Bruce C.S. Chou, “A Novel Thermal Bubble Based Micromachined Accelerometer,” Sensors & Actuators A 130-131, 2006, p282-289
[4]O. Brand, G. K. Fedder, “Advanced Micro & Nanosystems v .2
CMOS-MEMS”, Wiley-VCH Verlag Gmbh & Co. KGaA, Wenheim, 2005.
[5] F. Rudolf, A. Jordon, J. Bergqvist and H. Leuthold, “Precision
Accelerometer with ug Resolution”, Sensors & Actuators, A21-A23, 1990, p.297-302.
[6] Markus Biebl ; Thomas Scheiter ; Helmut Klose , Siemens Aktiengesellschaft, “Acceleration sensor and method for manufacturing same” US patent No.5447067 ,filed 1995.9.5
[7] Huikai Xie, University of Florida Research Foundation,” Integrated Monolithic Tri-axial Micromachined Accelerometer” US patent No.7258012 ,filed 2007.08.21
[8] Howard R. Samuels, Analog Device, Inc “Reducing Offset In Accelerometers” US patent No.6892576 ,filed 2005.05.17
[9] Michael W. Judy, Analog Device, Inc,” Suspension Arrangement for Semiconductor Accelerometer” US patent No.6223598 ,filed
2001.05.01
[10] 陳精一,“ANSYS震動學實務分析“,高立圖書有限公司2005 [11] 國家晶片設計中心CIC, http://www.cic.org.tw
事業股份有限公司
[13] G. K. Fedder, “Simulation of Microelectromechanical Systems ”, PHD thesis, University of California at Berkeley, USA ,1994
[14]李岳剛,” CMOS-MEMS 電容式加速度計的研發”,國立交通大
![圖 1-14 蜿蜒型電容式加速度計[8]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8342434.176109/25.892.130.759.210.749/圖114蜿蜒型電容式加速度計8.webp)
![圖 1- 15 線對稱彈簧配置示意圖[8]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8342434.176109/26.892.151.742.206.770/圖115線對稱彈簧配置示意圖8.webp)
![圖 4-2 微機電系統動態分析儀(MEMS Motion Analyzer, MMA)[11]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8342434.176109/39.892.386.591.97.377/圖42微機電系統動態分析儀MEMSMotionAnalyzerMMA11.webp)