國
立
交
通
大
學
運輸科技與管理學系
碩
士
論
文
號誌路口時制轉換時段長度之模擬研究
A Study on Timing Transition Periods at Signalized
Intersections Using Simulation Approach
研 究 生:田永平
指導教授:卓訓榮 教授、林貴璽教授
號誌路口時制轉換時段長度之模擬研究
A Study on Timing Transition Periods at Signalized Intersections
Using Simulation Approach
研 究 生:田永平 Student:Yung-Ping Tien
指導教授:卓訓榮 Advisor:Hsun-Jung Cho
林貴璽 Guey-Shii Lin
國 立 交 通 大 學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
June 2006Hsinchu, Taiwan, Republic of China
中華民國九十五年六月
摘要
路網中的號誌路口是都市運輸系統中最重要的設施之一,而現今路口的號誌 控制器皆可建置多套時制計畫,能在預設的時間或有特定需求時進行時制轉換, 以因應不同的交通狀況。由於目前對不同號誌時制轉換方法的效率、轉換期間的 長短、時相補償程序對路口績效水準的影響等甚少實證,且在相關文獻中,亦鮮 少涉及前後不同的時制計畫的轉換與程序。本研究首先由文獻回顧綜合各種時制 設計方法與轉換原則,建構一同時具備多重與重疊時相遞換能力的時制轉換模 式,並經由TSIS 模擬平台的輔助,發展 RTE 外掛程式,提供時制轉換前後各時 相動態切換時間之用。本研究在不同的流量水準與前後時制組合之下,對八種不 同情境進行實驗設計與模擬,並對本研究模式與其他重要時制轉換法的輸出速率 與延誤績效進行交叉統計檢定、分析與比較,最後歸納最適時制轉換時段的長度 與檢討各補償週期對時制轉換過程產生的問題與效果。 關鍵詞:轉換時段、時相補償、多重時相、統計檢定Abstract
Signalized intersections are one of the most critical facilities of an urban transportation system. With multiple build-in timing plans, modern signal controllers have high flexibility to perform the function of timing switchovers to adapt to various traffic conditions. Unfortunately, neither of the practical tests showed that the existing approaches can operate timely and efficiently, nor of them provided insight to the traffic performance that various timing transition procedures may result. Based on some findings from the literature review, this study started with a model formulation to deal with timing transition under multiple and/or overlapping phasing conditions. Via TSIS simulation platform, a RTE program is also developed for dynamically tracing, activating, and terminating phases at the set switchover points. With various volume levels and timing combinations, this study proceeded a number of experimental designs and simulation to eight major scenarios. A series of sensitivity tests were also conducted. The analyses showed that the newly developed model could lead to a relatively good performance as compared with the others under most of the demand levels. Some transition periods for specific traffic and control conditions were also suggested based on statistical tests and comparisons.
目錄
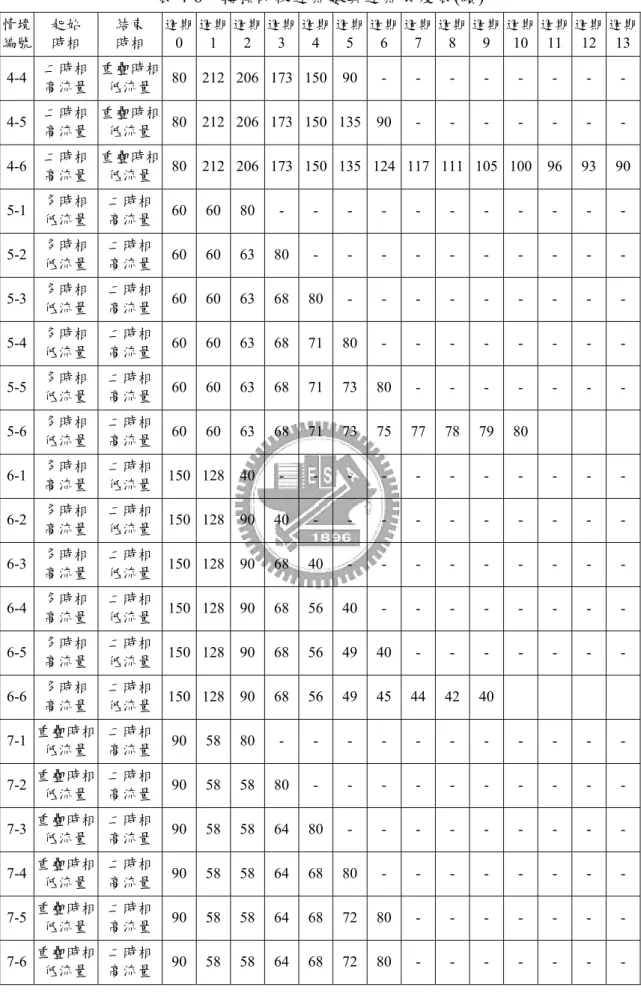
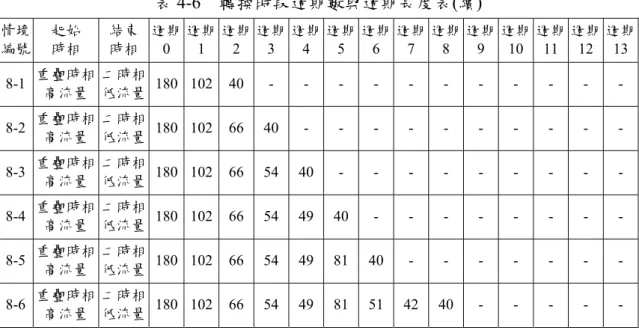
目錄...i 圖目錄...v 表目錄...vi 參數定義... viii 摘要...i Abstract ...ii 第一章 緒論...1 1.1 研究背景與重要性...1 1.2 研究目的...2 1.3 研究範圍...2 1.4 研究內容...3 1.5 研究步驟與流程...3 第二章 文獻回顧...6 2.1 獨立路口號誌時制設計...6 2.2 號誌時制轉換方式相關文獻... 11 2.3 路口績效衡量指標...18 2.4 車流模擬系統...20 2.4.1 巨觀車流模擬系統...20 2.4.2 中觀車流模擬系統...21 2.4.3 微觀車流模擬系統...22 2.5 小結...25 第三章 研究方法...28 3.1 系統界定...28 3.2 TSIS RTE ...30 3.3 時相補償模式...32 3.3.1 模式架構...32 3.3.2 實驗範例...41 3.4 最適轉換長度...43 3.5 小結...45 第四章 情境模擬與分析...46 4.1 模擬之各項假設...464.2 模擬情境之設定...49 4.3 輸出績效與趨勢...53 4.3.1 各轉換時段之輸出績效分析...53 4.3.2 不同轉換方式之績效輸出資料...65 4.4 小結...68 第五章 結論與建議...69 5.1 結論...69 5.2 建議...69 參考文獻...70
圖目錄
圖1-1 研究流程圖 ...5 圖2-1 突變氏轉換法範例圖 ... 11 圖2-2 主要道路綠燈延長法新時制大於舊時制範例圖 ...12 圖2-3 主要道路綠燈延長法新時制小於舊時制範例圖 ...12 圖2-4 主要道路綠燈延長法決策流程 ...13 圖2-6 基本突變轉換法 ...14 圖2-7 最大綠燈轉換法 ...15 圖2-8 傾斜轉換法 ...16 圖2-9 鞍點轉換法 ...16 圖3-1 TSIS 路口幾何架構圖 ...28 圖3-2 執行延伸介面 RTE 示意圖...31 圖3-3 道路狀態示意圖 ...32 圖3-4 時相補償模式流程圖 ...34 圖3-5 緩和係數與流量改變關係圖 ...36 圖3-6 兩時相轉三時相無分割週期轉換圖 ...40 圖3-7 兩時相轉三時相有分割週期轉換圖 ...41 圖3-8 時相與週期長度變化趨勢圖 ...43 圖3-9 最適轉換長度示意圖 ...44 圖4-1 高流量轉低流量之平均速率圖 ...56 圖4-2 高流量轉低流量之平均延誤時間圖 ...56 圖4-3 低流量轉高流量之平均速率圖 ...60 圖4-4 低流量轉高流量之平均延誤時間圖 ...61 圖4-5 不同轉換方式之平均速率比較圖 ...66 圖4-6 不同轉換方式之延誤時間比較圖 ...66表目錄
表2-1 延長或縮短轉換時相的準則 ...17 表2-2 時制轉換法比較一覽表 ...26 表3-1 轉換前後號誌時制計畫 ...42 表3-2 時相補償模式執行計畫 ...42 表4-1 各時相流量設定表 ...47 表4-2 二時相時制計劃表 ...48 表4-3 多時相時制計劃表 ...48 表4-4 重疊時相時制計劃表 ...48 表4-5 模擬情境說明表 ...49 表4-6 轉換時段週期數與週期長度表 ...50 表4-7 模擬編號表 ...53 表4-8 平均速率績效輸出表 ...54 表4-9 平均速率績效變異輸出表 ...54 表4-10 平均延誤時間績效輸出表 ...55 表4-11 平均延誤時間績效變異輸出表 ...55 表4-12 主情境三之平均速率差信賴區間表 ...57 表4-13 主情境四之平均速率差信賴區間表 ...57 表4-14 主情境六之平均速率差信賴區間表 ...57 表4-15 主情境八之平均速率差信賴區間表 ...58 表4-16 主情境三之平均延誤差信賴區間表 ...58 表4-17 主情境四之平均延誤差信賴區間表 ...58 表4-18 主情境六之平均延誤差信賴區間表 ...59 表4-19 主情境八之平均延誤差信賴區間表 ...59 表4-20 高流量轉低流量之平均速率差信賴區間表 ...59 表4-21 高流量轉低流量之延誤時間差信賴區間表 ...59 表4-22 高流量轉低流量綜合評比表 ...60 表4-23 主情境一之平均速率差信賴區間表 ...61 表4-24 主情境二之平均速率差信賴區間表 ...62 表4-25 主情境五之平均速率差信賴區間表 ...62 表4-26 主情境七之平均速率差信賴區間表 ...62表4-27 主情境一之平均延誤差信賴區間表 ...63 表4-28 主情境二之平均延誤差信賴區間表 ...63 表4-29 主情境五之平均延誤差信賴區間表 ...63 表4-30 主情境七之平均延誤差信賴區間表 ...64 表4-31 低流量轉高流量平均速率差信賴區間表 ...64 表4-32 低流量轉高流量延誤時間差信賴區間表 ...64 表4-33 低流量轉高流量綜合評比 ...64 表4-34 不同轉換方式平均速率績效輸出表 ...65 表4-35 不同轉換方式平均延誤時間績效輸出表 ...65 表4-36 不同轉換方式之平均速率差信賴區間表 ...67 表4-37 不同轉換方式之平均延誤差信賴區間表 ...67 表4-38 不同轉換方式之差異比較 ...68
參數定義
Φ PHF 時相Φ 的尖峰小時因素, PHF= Φ ) / ( cv 時相 Φ 之預設飽和度,=( cv/ ) Φ h 時相Φ 之預設飽和車間距(秒),=h L t 每一時相損失時間 (秒) ρ 流量變動緩和係數 a 路口轉向編號,a=1,2,... a′ Max{v(k,a),a∈M(k,Φˆ)}所對應之a值 k 週期順序編號 Φ 時相Φ , Φ =1~N k Φˆ 時相編號 k N 第k週期之總時相數 k C 第k週期之號誌週期長度 (秒) ) , (kΦ M 第k週期時相Φ 所包含轉向a之集合 ) , ( ak m 第k週期轉向a所屬時相Φ 之集合 old V(Φ) 舊時制之時相Φ 之臨界流量 (輛/小時) new V(Φ) 新時制之時相Φ 之臨界流量 (輛/小時) ) , (kΦ V 第k週期之時相Φ 之臨界流量 (輛/小時) ) , ( ak v 第k週期之轉向a之流量 (輛/小時) ) , (kΦ G 第k週期之時相Φ 之有效綠燈長度 (秒) new G(Φ) 新時制之時相Φ 之有效綠燈長度 (秒) ) , ( ak g 第k週期之轉向a之有效綠燈長度 (秒) ) , (kΦ R 第k週期之時相Φ 之紅燈長度(為第k-1週期時相Φ 執行結束至第k週期 時相Φ 開始前之時間長度) (秒) ) , ( ak r 第k週期轉向a紅燈長度(為第k-1週期最後包含轉向a之時相Φ 結束起至 第k週期第一個包含轉向a之時相Φ 開始止之時間長度) (秒) ) , ( ak Sr 第k週期內最後一個包含轉向a之時相結束起至第k週期結束時之紅燈長 度 (秒)a∈M(k,Φ) , =∑
× Φ 1 ) , (ka Ck- G(k,a)-Φ tL Sr) ,
( ak
q 第k−1週期內最後一個包含轉向a之時相Φ 結束起至第k週期第一個包 含轉向a之時相Φ 開始時,轉向a累積車隊長度 (輛)
第一章 緒論
1 . 1 研 究 背 景 與 重 要 性
道路交叉口是都市路往中最要的環節之一,來自不同方向的車流匯集在路口 進行穿越、併入、分出等行為,因而產生許多潛在衝突點,而透過號誌系統,以 交互更替方式分配時間與路權予各方向車流,可以管制並引導不同方向的車流依 序行進,降低路口肇事衝突,並提升道路的紓解流量。然而道路交通量會隨著時 間而變化,如每日上、下班之尖峰時段與一般離峰時段的交通量就有很大的差 異,故在號誌設計上可將一天的總時間分為若干時段,每個時段有對應的號誌時 制計畫,以配合不同的流量水準。隨著1980 年代以來科技與微機電的快速發展, 交通號誌控制器已由只能儲存少數時制的機電式系統,進步到可儲存多種時制, 並依照道路交通需求狀況來設計適宜時制之微電腦系統控制器;近年來更由於資 訊科技與網際網路之蓬勃發展,使得號誌控制系統得以大量收集路網偵測器之資 料,迅速儲存、分類並進行動態運算,發展即時之控制策略來因應路口之需求。 現今的號誌控制器,大都可內建多套時制計畫,可隨著時間或特定需求迅速轉換 因應。 不同的號誌時制計畫可以適應多變的交通需求,在執行不同號誌時制計畫 時,大都必須執行前後號誌時制間的轉換作業;所謂時制轉換作業是將正在執行 中之號誌時制計畫轉換為另一套號誌時制計畫的程序。然而過短的號誌時制轉換 時間或過於劇烈的時制變化,常會衝擊路口的交通運行,且駕駛人不易適應,容 易導致瞬間交通壅塞與異常的駕駛行為,甚至發生安全顧慮;過長的號誌轉換時 間,雖然轉換過程平緩,但容易落入使路口號誌時制執行過長時間的缺陷中,增 加運行延滯與駕駛人的不耐。因此,時制轉換期間的長短,以及轉換的方式是研 究時制轉換作業很重要的議題。 過去許多號誌時制轉換的方法與文獻[4]中,對於時制轉換作業都有一些簡 單的詮釋方法。如當到達號誌轉換起始時間時,系統會繼續將舊時制執行完成, 並在於下一個至數個週期中逐漸將舊時制各時相平均遞增或遞減為新時制長 度,以比較和緩之方式轉換新舊時制,可以減少對駕駛人的衝擊,使駕駛人逐漸 適應新號誌時制。雖然有許多研究與號誌控制系統使用以上的時制轉換方法,但 是往往缺乏有力的證據顯示這些轉換作業具有效率,且多長之時間才為最適合之 號誌轉換期間,除此之外,過去研究之極少對各號誌轉換方法作較深入的探討、 證明與比較,因此多長之轉換期間為最合適,也就是界定最適轉換長度,乃為本研究探討之重點。最後,在過往所有的文獻中,號誌的轉換作業多只探討前後號 誌相同時相數之轉換,但對於時制與時相數皆不同之轉換卻鮮少有人進行研究評 估,部分研究僅限制在非重疊的時相轉換,因此多時相與重疊時相轉換方式也是 本研究另一研究重點。有鑑於國內外以往從事不同時相數與重疊時相之號誌轉換 作業研究極為罕見,而實務單位所採行之轉換作業又大多基於主觀的判斷,而難 以通過嚴謹的學術檢驗;另外目前相關之書籍與研究報告仍不多見,顯見此方面 的研究為交通控制領域的一項重要課題,因而亟待進一步研究。
1 . 2 研 究 目 的
過去國內、外對於號誌時制轉換時間與週期,大都是依照自訂的週期數,由 立即轉換到最多四個轉換週期內,完成號誌時制的轉換。這段轉換時間與週期數 大多為自訂,因此,本研究希望在不同的流量水準與運行績效指標之下,檢討並 擴充既有之號誌時相補償方式,進一步發展在前、後時制轉換中因不同的時相數 與/或時相順序組合所需要的最適轉換長度,以使號誌時制轉換過程的時相補償 計畫更加完整。本研究之主要目的如下: 1. 進行時制轉換方式相關文獻之蒐集與整理,回顧與檢討現有時制轉換作 業的方式和效率。 2. 模擬軟體 TSIS 功能的檢討與外掛程式 RTE 的規劃和設計。 3. 經由初步流量與時制轉換的組合,界定號誌時制轉換點的起始時制切換 準則。 4. 研擬合宜的多時相時制之間的轉換方法,以提升路口的績效。 5. 由不同的流量水準與前後時制之組合,與對於各種績效指標值的分析和 比較,歸納最適時制轉換時段長度,以降低轉換時段對路口的衝擊與影 響。 6. 經由不同情境假設範例,探討最適時制轉換時段長度與各補償週期對時 制轉換作業所產生的問題與效果。1 . 3 研 究 範 圍
本研究以預設時制之獨立號誌路口為對象,探討當尖離峰交通量改變或進行 時制變換計畫時所需採取的方式,以及最適時制轉換時段長度與補償週期。本研 究基於以下條件進行時制轉換作業分析與探討: 1. 路口於尖離峰各時段的號誌時制計劃資訊為已知。 2. 路口各臨近路段的歷史流量或動態車流偵測(含到達率、轉向等)資料為未知。 3. 路口各臨近路段的車流速率分佈資料為已知。 4. 時制轉換設計僅針對四輪以上之小汽車車輛進行作業,不考慮機慢車與 行人之影響。台灣的道路情況有龐大的機車數量,在道路上即使將機車 換算乘小客車單位,但其行進特性仍與汽車有很大之差異,因此本研究 不考慮將機車因素納入模式考量, 5. 號誌控制器具備支援時制轉換設計所需之燈色與時段設定功能需求和 彈性。
1 . 4 研 究 內 容
本研究主要的內容如下: 1. 綜合不同的時制設計方法與時制轉換原則,分析過去相關研究不足之 處,比較並界定本研究之範圍與目標。 2. 由文獻回顧遴選號誌路口常用之評估績效指標,作為統計與評比不同轉 換方式與轉換週期的基礎。 3. 時制轉換期間各補償週期模式之建立與 RTE 程式之發展。 4. 建構多重時相間之時制轉換模式,在預設的流量水準與時制組合之下, 進行範例設計,由模擬輸出績效比較本研究與其他相關之時制轉換法, 以了解在基本情況下各時制轉換法的效率。 5. 進行敏感度分析,針對不同情境假設進行模擬與分析,以瞭解所研擬之 時制轉換週期法在特定情境假設下的效率,並歸納最適時制轉換時段長 度與各補償週期長度。1 . 5 研 究 步 驟 與 流 程
本研究的執行步驟如下: 1. 確定研究的問題之背景 與此問題在國內外各文獻的研究成果,訂立所欲探討的重點和目標,並 根據問題之性質,決定研究之範圍與規模。 2. 相關文獻之彙整與啟發 參考合理可行之時制設計概念、時制轉換方式,以及號誌時相補償方法 等議題,並遴選適用之路口績效衡量指標。 3. 系統分析 了解在交通量變動的情況下,號誌轉換時間對於路口績效之影響,以發展號誌之時制轉換模式。 4. 時相補償方法之研擬,並與現有之時制轉換方法比較,以探討各方法之 特點與限制。 5. 進行範例設計,套用現有之時制轉換方法與本研究所研擬之時相補償方 法,以了解在基本情況下各時制轉換方法之效率。 6. 敏感度分析 針對不同情境假設進行模擬與分析,以了解本研究研擬之時制轉換方法 在特定情境假設下是否具有效率。 7. 根據分析之結果提出結論與建議。 本研究之研究流程圖如圖所示:
問題型態與定義 相關文獻收集與探討 時制設計 時制轉換 現有方式檢討 新時制轉換方式擬定 方案模擬與分析 方案差異檢定 結論與建議 最適轉換時段 多時相轉換 重疊時相轉換 TSIS 延伸執行介面 路口績效衡量 圖1-1 研究流程圖
第二章 文獻回顧
本章首先回顧有關獨立交叉路口號誌時制設計之相關文獻,以了解號誌時制 與路口各因素間之關聯性;其次,回顧過去所發展出的號誌轉換方式,並了解各 方式之優缺點與限制,以作為未來研究之基礎;再其次,回顧路口評估績效之相 關文獻,以作為比較優劣轉換作業之依據;最後則對於所使用的模擬分析工具進 行了解,以選擇適合作為本研究進行模擬分析之工具軟體。2 . 1 獨 立 路 口 號 誌 時 制 設 計
預設時制號誌控制利用不同之時相配置與長度來控制不同時間內之車流,獨 立交叉路口號誌時制之設計,應根據交叉路口交通量、流向、車速、路況、及行 人數等因素。在設計方法上,主要可分成下列四類[6]: 1.方程式法(Formula) 方程式法大都是以各臨界道路的臨界流量與飽和流量為基礎,進而提出相關 公式來計算週期之長度與各時相之長度,最後在以實際的道路流量與交通資料來 加以驗證。這些方法包括: (1)最小週期法[21] 號誌的每一個時相可以允許一到數個路口轉向流動,但其中有一個轉向流動 是最密集的,則該轉向所佔用的車道稱為「臨界車道」,而時相所設定之通行時 間必須足夠供應該臨界車道流動之需求。在每個週期中的每一個時相都有損失時 間(啟動延誤損失時間與變換時段損失時間),因此除了損失時間外,該路口永遠 都有一個臨界車道的車流在移動。依據此概念,可推得最小可行週期之公式如式 (1)為: h V t N C c L / 3600 1 min − × = ………(1) 其中 min C :期望之最小週期(秒) N :時相數 L t :每一時相損失時間(秒) c V :總臨界流量(輛/車道/小時)h :車間時距(秒) 有效綠燈時間的計算為式(2):
(
)
c i i V q L C g = − × ………(2) 其中 i g :時相i 之有效綠燈時間(秒) C :週期長度(秒) L :每一週期的總損失時間(秒) c i Vq : 臨界流量i 佔路口總臨界流量的比例 (2)韋布斯特(Webster)時制計算公式[22]: 韋布斯特將交叉路口之總延誤計算公式加以微分,得到最小延誤值的週期長 度公式如式(3)所示: Y L y y y L C n o − + = − − − + = 1 5 5 . 1 1 5 5 . 1 2 1 KK ………(3) 其中 o C :最小延誤週期長度(秒) n :總時相數 i y :時相 i 之臨界流量與對應飽和流量之比值,i=1~n Y :y 的總和i =∑
yi L :每一週期的總損失時間(秒) 有效綠燈時間可以由式(4)求得:(
C L)
Y y g i o i = − i=1~n………(4) 其中 L Co − :整個週期內所有有效綠燈之總和 以 Webster 公式計算而得之時制,具有使交叉路口延滯最小之效用,且有方 程式求解迅速之優點,但是在有重疊時相(Overlap)時,此法並不易求解且易放大 延誤。此外,以此公式計算之週期,會較實際所需者為長,導致綠燈時間的浪費。 (3)美國聯邦總署(FHWA)時制計算公式[23]: 美國聯邦總署(FHWA)在 1983 年提出獨立號誌路口時制計算步驟,以總需求 TD 與比例需求CD指標,來界定一天所需要的時制計劃數:TD=(N,S)max+(E,W)max………(5) 其中 TD :交叉路口總需求 max ) , (N S :往南或往北方向最高需求量 max ) , ( WE :往東或往西最高需求量 由上述之條件,可得到比例需求值為: TD S N CD=( , )max 或 TD W E CD= ( , )max ………(6) CD:交叉路口比例需求 當TD 小,則可考慮較短的週期時間。而比例需求CD則表示哪一方向的交 通需求量較大,需要較高的時間比例。 FHWA 的號誌週期是先計算最小綠燈時間乘以各時相臨界車道的流量比 值,將各方向調整後之綠燈時間加總起來,便得一個週期應有的綠燈時間。而最 小綠燈時間則是以行人通行綠燈時間為主,以行人能夠安全通過為目標,其公式 (7)為: GPi = +W −Y 4 7 i=1~n………(7) 其中 i GP :第i 時相之最小綠燈時間(秒) W :交叉路口寬度(英呎) Y :黃燈時間(秒) n :總時相數 i :時相順序,i=1~n (4)HCM 建議公式[24]: 1997 年版的公路容量手冊(HCM)採用臨界流動的概念來計算週期。以週期 內的損失時間應佔的比例反推最小週期時間,其中每一時相的綠燈時間是以臨界 流動所需最小綠燈時間為主,並在計算出期望週期後取整數週期,以利時制的設 定。每一時相的有效綠燈時間係以全週期的有效綠燈時間乘上臨界流動佔總流量 之比值而得。其中S 表示在某種服務水準下每車道每小時的飽和流量。 0
( )
v c PHF S V N C c des / 1 3 0 − = ………(8) 其中 des C :期望之最小週期(秒) N :時相數 c V :總臨界流量(vphpl) PHF :尖峰小時因素 c v / :飽和度 0 S :某服務水準下之飽和流率(vphpl) 有效綠燈時間的計算為下式(8):(
)
c i i V q L C g = − × ………(9) 其中 i g :時相i 之有效率燈時間(秒) C :週期長度(秒) L :每週期總損失時間(秒) c i Vq : 臨界流量i 佔路口總臨界流量的比例 2.數學規劃法(Mathematical Programming): 數學規劃法為界定目標式與相關的限制式,以數學規劃模式求解時制計畫。 當號誌系統的設立已有明確的目標與限制時,通常可以採用本法。以往的研究 中,大多以週期長度或延誤最小為目標,而以最小綠燈時間與滿足路口需求等條 件為限制求解。較常用之數學規劃法如下: (1) Martin-Lof (1967)[28] 以動態規劃法發展路口最佳化號誌控制模 式,並以紓解等候車隊作為模式的重點,並不需先行假設車隊抵達及疏 散之統計分配型態,但對於號誌時制計劃所產生的延滯、週期長度並未 加以評估,故所產生之時制計畫績效不佳。 (2) Allsop(1971)[26]採用 Webster 延滯簡化公式,目標式為使系統延滯 最小,限制式為週期時間限制、最短綠燈限制與容量限制三部份。本模 式主要著重各方向之飽和度 v/c <1,並設立一階段矩陣(Stage Matrix) 表示每一方向存在之車流,但此模式僅能應用於時相數固定且時相出現 順序不變的情況。 (3) Importa 與 Cantarella(1984)[27]發展一套二元混合整數線性規劃模式,包含交叉路口容量最大、週期時間最小,以及延滯最小等三項目標; 他們利用各車流方向的 v/c 小於 1 的條件建立車流衝突矩陣,並將不衝 突的方向歸入同一時相內,以縮短週期長度。 (4) Sakita(1986)[25]以線性規劃法來設計交叉路口的最佳時制,並以週 期時間最短為目標,限制式則為各車流方向之 v/c 小於 1。類似 Allsop 的模式,必須建立號誌時相與車流流動間之矩陣,但限制式無法避免選 擇互相衝突之車流,故使用受到限制。 3.搜尋程序法(Search Procedure)[3][29]: 搜尋程序法係事先設定評估的標準,然後對各種可能情況加以比較,逐步捨 棄較差設計,最後找出最佳的時制計畫。此法主要在透過一連串的搜尋程序,以 路口績效值為檢視標準,逐一淘汰較差的部份,獲得最佳路口號誌時制,較著名 的搜尋程序套裝軟體為SOAP(Signal Operation Analysis Package)。該軟體以交叉 路口延滯值最低為目標,求解路口號誌最佳週期、時比、時相等時制參數,並且 可對時制計畫進行評估。 搜尋程式法的優點為具有彈性,且可依使用者的需求制定一相關的程序來求 最佳解;缺點則為搜尋過程無法對每一時制設計均進行評估,只能在一定範圍內 針對相等時距的時間點進行搜尋,因此其時制計畫只是一個次等解。另外,SAOP 軟體在搜尋程序中,已將全日交通車流量所因應的號誌控制策略納入評估,以類 比指數做為控制策略的歸類,但其時段劃分的方式仍由人工判斷,且各控制策略 時制並非依各時間單元流量計算而得,係以平均數流量代之,忽略了同一控制策 略內各時間單元流量之變異。 除了 SOAP 外,還有 TRANSYT-7F 等這些套裝軟體都是以搜尋程序法尋找 最小延誤週期,但最後搜尋到的通常只是屬於某種特定條件之下的近似最佳解, 而非全域最佳解。 4.模擬法(Simulation)[2]: 構建一近似真實系統之模式,以各種時制計畫加以模擬,觀察模式中各項特性之 表現,從中遴選最佳之號誌時制計畫。模擬的方式分為兩類: (1)事件掃描法:當有事件產生時才進行掃描運算,系統每次掃描的時間並 不固定,適合用於大型系統之處理。 (2)時間掃描法:將週期分為許多時階(steps),對每一時階進行一次掃描 運算,紀錄當時交通系統之狀況,並可配合搜尋程序法來模擬尋求最佳 解。時階愈小,計算量愈大,也更能反應實際車流狀況。 根據模擬對象之不同,模擬法可分為三大類:
(1)巨觀:著重整體車流、車隊之移動及延滯的狀況。以平均數值的方式處 理車輛行為。 (2)中觀:著重於車隊的模擬,觀察車輛的推進,以事先調查或分析的平均 數值處理,但忽略車與車之間的互相干擾行為。 (3)微觀:以單一車輛為模擬對象,觀察與紀錄車輛在各路口或路段之駕駛 行為或行進軌跡。
2 . 2 號 誌 時 制 轉 換 方 式 相 關 文 獻
道路的交通流量會隨著一天中不同的時段而呈現高低不同的變化;一般而 言,大致上可分為上午尖峰(如上午七時到九時)與下午尖峰(如下午五時至七 時)等兩大時段。為了配合不同時段下交通流量的變化,各號誌化路口便需要有 不同的對應時制來加以因應;而不同的時制計畫會在其週期、時比、或時差上出 現程度之差異。交通部運輸研究所於民國九十年[4]曾比較與整理各種時制轉換 方法如下: (1)突變式轉換法(Sudden Transition) 為最簡易之時制轉換方式,不需考慮任何狀況,也沒有任何的補償機制,故 很容易對於號誌路口產生衝擊。本法當路口正在執行舊時制,而到達號誌轉換起 始時間時,立即由舊時制轉換為新時制並開始執行,並不考慮新舊時相銜接之問 題。 資料來源:交通部運研所[4] 圖2-1 突變氏轉換法範例圖(2)主要道路綠燈延長法(Extended Main Street Green Transition) 此方法使用於有明顯主次要道路區別之交叉路口,本法會比較新舊時制之週 期綠燈長度作為轉換時制之依據。當遇到時制轉換起始時間時,若新時制之週期 內有效綠燈長度大於或等於舊時制之週期內有效綠燈長度,則直接執行新時制之 綠燈時相;若新時制之主要幹道時相週期內有效綠燈長度小於舊時制之週期內有 效綠燈長度,則待舊時制幹道綠燈時相執行完畢後,才切換新時制的幹道綠燈時 相。本轉換方法會優先考慮補償綠燈時間給予幹道,以加速幹道的車流優先通 行,但在沒有明顯主次要道路區別之交叉路口較不適用。 資料來源:交通部運研所[4] 圖2-2 主要道路綠燈延長法新時制大於舊時制範例圖 資料來源:交通部運研所[4] 圖2-3 主要道路綠燈延長法新時制小於舊時制範例圖
新舊號誌轉換開始 比較新舊時制計劃 主幹道執行完新綠燈時段 新時制下一時相執行開始 新時制 週期綠燈時間 大於等於 舊時制週期 綠燈時間 是 主幹道執行新綠燈時段 主幹道執行完舊綠燈時段 否 圖2-4 主要道路綠燈延長法決策流程 (3)漸進式轉換法(Gradual Transition) 漸進式轉換法顧名思義是以逐漸變換的方式,由舊時制逐漸轉換為新時制。 資料來源:交通部運研所[4] 圖2-5 漸進式轉換法
當到達號誌轉換起始時間時,號誌會繼續將舊時制執行完成,並在於下一個至四 個週期逐漸將舊時制的各時相平均遞增或平均遞減為新時制長度。此種轉換模式 以比較柔和之方式轉換新舊時制,故可以減少駕駛人的衝擊,使駕駛人逐漸適應 新號誌時制;另外,在固定的清道時段長度之條件下,可使幹道號誌連鎖控制系 統所的路口,在不改變其連鎖號誌時差關係下完成時制轉換作業。
(4)基本突變轉換法(Basic Abrupt Method)
即當到達號誌轉換起始時間時,舊時制號誌時相會繼續執行至該時相結束為 止,並開始執行清道時段之後才執行新時制。而新時制中的起始時相乃是任意 的,不需注重轉換時相進行的順序,此轉換方法惟一的限制僅是在進行中的轉換 時相必須遵守最小綠燈的限制即可。
(5)改良式突變轉換法(Modified Abrupt Method)
此法與上述基本突變轉換法十分近似,僅有的差異係於時制轉換時段 (Changeover Time)中,必須決定在新時制計畫下執行的轉換「轉換時相」 (Stage);當到達轉換時間點時之時相,若尚未執行滿足最短綠燈時間,則至該 時相執行至最短綠燈時間後進入轉換時相,再執行新時制。 資料來源:交通部運研所[4] 圖2-6 基本突變轉換法
(6)最大綠燈轉換法(Maximum Green Method) 本法當遇到號誌轉換起始時間時,會將舊時制中尚未執行完畢與舊時制尚未 執行的剩餘時相中綠燈時間最長者為補償之基礎,並進行補償時段的分配,此一 轉換方式可以避免產生極短綠燈的情形。 資料來源:交通部運研所[4] 圖2-7 最大綠燈轉換法 (7)傾斜轉換法(Slope Method) 此轉換方式利用內插法來決定新舊號誌補償之長度。此轉換方式須先決定預 計之轉換週期長度(如兩個號誌週期),其次將號誌轉換起始時間點與號誌補償終 點相連成一直線,再將新舊週期相同一時相起始時間連接在一起,各時相之連線 與轉換時間連線的交點即為號誌補償時間長度。此轉換方式不會遺漏任何一個時 相,也不會造成極短綠燈的情形發生。此轉換模式只適合單一路口的計算,無法 應用於連鎖的號誌系統,因為其計算方式無法維持連鎖號誌路口所需要維持的時 差關係,故無法維持車流之續進。
資料來源:交通部運研所[4] 圖2-8 傾斜轉換法 * 4 t * 3 t * 2 t * 1 t 鞍點轉換法 新時制 轉換時段 時制轉換點 1 t t2 t3 t4 t1 t2 t3 t4 t1 t2 t3 t4 舊時制 n t 1 n t 2 n t 3 n t 4 轉換時段開始 2 t t3 t4 資料來源:交通部運研所[4] 圖2-9 鞍點轉換法
(8)鞍點轉換法(Minimax Method) 此轉換方式法是將交叉路口中的任一個時段命名為關鍵轉換時相,而舊時制 計劃就從此關鍵轉換時相開始進行轉換,以新、舊時制關鍵轉換時相的起始時間 差與新時制週期長度之間的關係,來決定應該延長或縮短轉換時相的長度。此轉 換方式的主要目的是維持主要街道的綠燈,再加上此方式不會遺漏任何一時相, 故可以產生比較良好之績效。 表2-1 延長或縮短轉換時相的準則 條件 決策 1) -2/3CYCLEn > TIMEkey 延長轉換時相 2) 0 >TIMEkey≧-2/3CYCLEn 縮短轉換時相 3) 1/3CYCLEn>TIMEkey>0 延長轉換時相 4) TIMEkey≧ 1/3CYCLEn 縮短轉換時相 註:此處之TIMEkey=(新時制計劃的關鍵轉換時相起始時間-舊時制計劃的 關鍵轉換時相起始時間);CYCLEn = (新時制計劃的週期) 資料來源:交通部運研所[4] (9)時相補償法與時制重設法 [1] 由姜智翔所發展出的號誌轉換模式。為處理轉換時段內新、舊時制計劃中時 相數不同的情況,本研究提出之兩種方法之轉換時段皆假設其週期數為大或等於 2 之偶數。其中,前半數之週期沿用舊時制之時相計劃,後半數之週期採用新時 制之時相計劃。若新、舊時制之時相數相同,則轉換時段可採用奇數之週期數。 預設時制式之號誌控制系統在不同時段中會使用不同的時制計畫以適應當時的 流量水準,以提供較佳的路口服務水準。然而在特定時段中,可能會面臨無法在 該時段結束時,將正在進行的週期執行完畢的情況。在此狀況下,有兩種 處理方式:
1. 時相補償法(Phase Compensation Method)處理方式是繼續執行該時段 的時制計劃,直到該時段結束後再進行時制轉換作業。
2. 時制重設法(Timing Reset Method)處理方式是在最後可完整執行完畢 的週期結束後即中斷該時段,並開始進行時制轉換作業。
在流量需求不變的情況下,週期長度一旦改變,即使由時相補償作業來紓解 該週期的車流,但仍會造成後續週期的額外停等車數。故無論經過多少週期皆無 法完全補償,因此週期長度永遠無法還原至原長度。當路口號誌某一時相之綠燈
時間被延長時,除相對導致延長衝突時相的紅燈時間外,之後亦需補償予衝突時 相相當的綠燈時間,以紓解該時相超額的需求,故週期長度會先增加,之後因流 量需求低於飽和流率,致使週期長度逐漸趨近原週期長度。有別於以往號誌時制 轉換方法之設計理念,該研究發現在轉換方法的設計上,可以由滿足流量需求的 角度著眼。
2 . 3 路 口 績 效 衡 量 指 標
有關路口績效之衡量,一般有延誤、停止數、等候車隊長度、燃料消耗、污 染物排放量,以及安全等。茲列舉如下[10]: (1)停止數:有關停止數的分析,一般皆直接牽涉到等候長度的估計,其公 式可分為兩類:平均等候長度及不同到達型態造成的溢流等候長度[6]。 (2)燃料消耗:交叉路口的燃料消耗主要為延誤及停止所致,但尚須評估交 通特性所引起的燃料消耗基本參數。吳水威[11]對於燃料消耗準則建立 一般化獨立號誌時制設計模式,對燃料消耗問題作深入之探討。 (3)安全:號誌化交叉路口係應用號誌時制將衝突之車流加以分隔,減少衝 突機會或衝突面積,以確保車流的安全運轉。依蔡育儒之整理[12],國 內研究大多以衝突點及肇事頻率分析為主,例如張應當[13]利用微觀模 擬模式分析路口肇事潛在危險;饒智平[14]分析路口衝突及肇事資料來 構建交叉路口之風險分析方法;林良泰[15]利用期望衝突量觀念分析路 口潛在危險性等均是。 (4)延誤:一般所謂的延誤乃指車流在運行當中遇到無法控制的因素,而造 成旅行時間上的損失[10]。車輛行經號誌化交叉路口所產生的「延滯」, 較為狹義定義為[7]「車流在路段上行駛時,被某種因素,如車流間的 摩擦干擾及交通管制設施等所影響或阻滯,以致使行駛時間發生阻延和 失誤」;而廣泛定義為[29]「車輛駕駛者或乘客行經一路口或路段,除 合理通行時間外,所額外增加的行車時間」。 對於號誌化路口效率的績效指標多採延滯時間為主,1985 年[31]及 1994 年 [32]美國公路容量手冊(Highway Capacity Manual ,HCM)均以延滯為號誌化路口 服務水準評估的主要指標,至於台灣地區公路容量手冊[5]亦以延滯為我國評估 號誌化路口服務水準的基礎,故在號誌化路口的效率指標以路口延滯為範疇。蔡輝昇[7]提出對延誤的定義是車流於路段上行進時受到若干因素之困擾或 影響,使得旅行時間增加或受到延宕,並將延誤分為:固定延誤、旅行時間延誤、
停等時間延誤、臨近路段延誤與運行延誤。何美瑩[16]依車輛操作行為與號誌之 作用影響將交叉路口延誤分為三種:路口延誤、等候延誤與平均停等延誤。 May[32]將號誌化交叉號口總延滯定義為當車輛在路口受干擾與不受干擾的旅行 時間差,其包括停等延滯和加減速所產生的損失時間。McShane 等人[31]則將延 滯分為四種。 1. 停等延滯 2. 臨近路段延滯或路口延滯 3. 旅行時間延滯 4. 等候延滯 各延誤模式中以 Webster 延誤公式最被廣泛應用與討論,其為同時考量均勻 到達與隨機到達的延誤模式。其公式(10)如下:
(
(
)
)
(
)
λ λ λ 3 2 5 1 2 2 2 65 . 0 1 2 1 2 1 × + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − + × − − = X q C X q X X C D ………(10) 其中 D :每車平均延誤(秒/車) C:週期長度(秒) λ :綠燈時比 X :飽和度 q :臨近路段車流平均到達率(車/秒) 2000 年 HCM [21]延續其於 1994 年修正之 Webster 延誤公式,加入車道群之 概念與車流到達型態參數,得式(12)[5]:(
)
(
) (
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − + − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ × − − = Ca mX X X X X C D 2 2 2 1 1 173 1 1 38 . 0 λ λ ………(11) 其中 D :每車平均延誤(秒/車) C:週期長度(秒) λ :綠燈時比 X :飽和度 Ca:車道群容量(車/秒) m:車輛到達型態調整係數2 . 4 車 流 模 擬 系 統
隨著各種科技新知的推陳出新,車流模擬器的發展也隨之蓬勃。然而世界各 國發展車流模擬器至今,不下數百種,而目前較廣為人知的,也有七十多種之多。 綜觀已發展之車流模擬器中,較多為用於某些特殊用途,如模擬圓環車流、單一 路口車流等,抑或僅供作離線分析車流之用。以下即針對目前世界各國已發展成 熟且較廣為人知的交通系統模擬器之特色,依巨觀、中觀與微觀之分,進行整理。2.4.1 巨 觀 車 流 模 擬 系 統
(1)CONTRAM 模擬器 CONTRAM 係由英國國家運輸研究實驗室(TRL)所發展的一種巨觀車流 模擬器,所使用方法類似"逐步增量指派"(Incremental Assignment)的觀念,其 發展之初的主要用途為交通指派之相關應用,目的在於評估都會區內的交通管理 措施。 (2)CORFLO 模擬器 CORFLO 是由美國聯邦公署(FHWA)所研發而成,包含三個次模組,即 FREFLO、NETFLO1 及 NETFLO2。CORFLO 主要適用於整合都會網路或走廊型 的交通指派巨觀分析,在單一、整合的環境下可區分小客車、卡車、公車及共乘 車輛,它可以模擬道路幾何條件改善情況、高乘載車道(HOV lanes)、公車操作、 車道封閉及交通事故之狀況。 (3)METACOR/METANETMATANET 是高速公路巨觀模擬模式,而 METACOR 是根據 MATANET 模 式擴充而成,以模擬平行幹道之車流情形。這兩個模式都是慕尼黑技術大學與 INRETS 運輸研究實驗室共同所發展出來,此模式交通流量模擬是建立在流量守 衡及動態速度─密度關係。METANET/METACOR 包含控制與動態交通指派模 組,因此可以模擬匝道儀控及可變標誌提供路線導引資訊之狀況,且由於運算速 度快,可用來作為即時的應用。 (4)SATURN SATURN 模擬器係由英國里茲大學運輸研究所於 1970 年代後期所發展。模 式基本上是由車流模擬模式與交通量指派模式以及附屬之輸入輸出程式所組合 而成,主要作為評估小範圍都市交通管理改善措施之參考,而不適用於一般大範
圍之長期運輸規劃,且並不具備求取路網最佳管理策略之功能,但是規劃者可透 過路網績效值的變化,逐漸修改管理策略,以選擇一較佳之可行方案。 (5)AIMSUN 模式 AIMSUN 交通模擬模式係西班牙巴塞隆納之 Catalunya 大學所發展,為歐洲 DRIVE 計畫的一部分,為評估交通措施之巨觀的模擬模式,本模式在高速公路 與地面道路的整合上較具效率。AIMSUN 的主要限制在於無法辨別路徑,不具 路徑處理與使用者決策的能力。此外,由於必須將微觀資料整合於原有之資料結 構中,致使模式僅能應用於小型路網。
2.4.2 中 觀 車 流 模 擬 系 統
中觀交通模擬為使用速度-密度模式以及細胞跟隨模式來作為模擬車輛移動 的模式。而路徑選擇模式與路徑轉換模式則可以來顯示出駕駛者路徑選擇的抉擇 狀態。其中,速度-密度模式用來計算在一個車隊中最後一台車的行車速率,細 胞跟隨模式則用來計算在一個車隊中第一台車的行車速率。而在車隊之中、介於 車隊頭與車隊尾之間的車輛之行車速率,則是以內插法,以車隊頭之車輛速率與 車隊尾之車輛速率來內插得到介於頭尾車隊車輛之間之車輛的行車速率。而較有 名的中觀車流模擬器列舉如下: (1)DYNASMART DYNASMART 係美國聯邦公路總署所贊助的計劃,由美國德州大學奧斯汀 分校所發展出來(1990),其前身是 Chang et al.(1985)用以模擬兩條平行道路交通 狀況之模擬模式,供作路網交通指派與模擬用之中觀(mesoscopic)模擬器。有關 車流模擬部分,主要是以連續性方程式及修正Greenshields 速度-密度關係式處 理;此外該模擬器亦可模擬號誌控制、交通事故及匝道儀控情形外,所模擬之動 態旅行時間還可計算最適行駛路徑,並可模擬車輛配有車內行車資訊情形下駕駛 者之路線選擇與車輛行駛。因此可以用個體需求模式進行駕駛者行為決策對路徑 之選擇。對於大型網路動態交通指派之系統績效評估確實不失為一值得考慮之車 流模擬器。 (2)成功大學交研所之「行車路線導引系統」模擬模式 VRGS 國內成功大學所發展「行車路線導引系統」模擬模式,其主要係針對交通資 訊系統與車輛導引系統所發展的模式,用以評估行車路徑導引效果。該模式已具 備模擬指派模式的雛形,但模式中對於駕駛者決策行為與交通資訊系統彼此的互動關係,路徑中不同種類車輛的處理,仍缺乏整體性的考慮。 (3)DynaTAIWAN[20] 國內交通鄰運輸研究所於 92 年度開始辦理「區域級智慧型運輸系統示範計 晝-核心交通分析與預測系統」兩年朗計晝,由交通郃運輸研究所與逢甲大學在 合作發展,核心交通分析輿預測系統軟體原型,系統發展目的為模擬路網車流整 體分布情形,提供交通管理人員以及運輸規劃人員進行相關管理規劃措施擬定之 協助,發展初期主要參考美國公路聯邦總署(FHWA)所發展的兩套動態指派模式 DYNASMART 以及 DynaMIT,並考量國岡駕駛者之行為特性、車流特性與交控 策略,建立一套本土化模擬系統。該系統已完成初步系統分析設計以及核心模擬 程式之開發,並命名為DynaTAIWAN (Dynamic Traffic Assignment and Information in Wide Area Work)。目前已經完成之階段包含了 DynaTAIWAN 系統的交通指 派、離線規劃模擬功能以及即時控制模組之細部架構。
2.4.3 微 觀 車 流 模 擬 系 統
微觀車流理論主要是探討車輛於道路上車輛自身與其他車輛間的相互影響 特性,由分析個別車輛或各與其他車輛之交互作用,及其運行特性對於整體車流 之影響,其中跟車理論為微觀車流中最重要的核心。 (1)TSIS 模擬器交通軟體整合系統 TSIS(Traffic Software Integrated System),為美國聯邦公路 總署(FHWA)所發展之一套軟體,裡面包含了多種交通模擬相關的子軟體,1997 年8 月發行之模擬軟體「CORSIM」,其功能是整合了原有的高速公路模擬模式 (FRESIM)及市區街道模擬模式(TRAF-NETSIM),並提供交通量指派(T.A.),可外 掛交通工程或分析工具軟體,並與Windows 相結合,成為一使用簡易、功能完 整的都市交通模擬軟體。TSIS 由 FHWA ATMS R&D Group 及 ITT Industries, Systems Division 研發,主要以 CORSIM 為核心所發展出的公開型介面圖形化車 流模擬軟體,可對於平面號誌控制型道路結構、高速公路系統、或是平面及高速 公路整體道路來進行車輛車流模擬。TSIS 包含四部份:CORSIM、TSHELL、 TRAFED、TRAFVU。 TSIS 的主要特色在於其內建的跟車模式與變換車道模式十分精細,跟車模 式採採匹茲堡大學所研發之『Pitt 模式』,而變換車道模式則包含了強迫性變換 車道、隨機性變換車道與自由性變換車道。此模式對於每一個車輛駕駛特性是以 駕駛人與車輛特性分布曲線隨機指定。除一般交通狀況外,亦可用以交通過飽和
狀態及事故發生情況下;而在高速公路與地區道路之次網路之模擬車流是以界面 的連接結點來處理,這種方式與CORFLO 模式十分類似。此外模擬器本身,亦 可直接用於模擬定時及觸動號誌控制,而所謂整合式高速公路匝道儀控模式,亦 正於發展中。 國內之研究如曾莉莉[17]以 FRESIM 車流模擬軟體,模擬中山高速公路內壢 交流道制中壢交流道中間路段之車流狀況,產生符合國內高速公路之幾何性質的 車流狀況與路段旅行時間資料,並進行統計分析;李謀和以FRESIM 應用於第二 高速公路西湖至大甲路段初步設計方案之評估[18];蘇梓見以模擬實驗法,採用 FHWA 所研發之 FRESIM 微觀車流模擬模式蒐集地區交通感應儀控所需的相關 交通資料;龔哲弘[19]以 FRESIM 模擬主線素線控制措施在我國高速公路環境下 的應用狀況,同時評估其實行的績效。 (2)INTEGRATION
INTEGRTION 係由 M Van Aerde 於 1985 年開始發展的一套車流模擬器。模 擬器設計之初主要在於評估整體的交通路網下的交通策略,其路網包含高速公路 與市區街道。INTEGRATION 以定時掃瞄(Time Scanning)的方式來指派路徑與 單一車輛,並根據此一路徑來移動車輛,在行進的過程中,車輛可依當時的交通 狀況來調整所選擇的路徑,但路線的選擇僅限於最短路徑。在每一個模擬時段 中,最短路徑將依據當時的交通狀況來計算,匝道儀控則以固定號誌方式來模擬 及控制進出高速公路之車輛數。另外,其內建之可接受車間距模式,主要用以模 擬停/讓標誌控制下車輛運行行為及交叉路口左轉車運行行為。 (3)TRANSIMS
TRANSIMS 是 LOS ALAMOS 國家實驗室於進行 FHWA 旅運模式改進計畫 時所一併發展的,主要是為了區域整合微觀模擬及預測交通品質與環境衝擊。 TRANCIMS 可以預測每一個家戶或個人的交通需求,因此結果可以模擬道路路 網的微觀狀況及包括車輛排放與擁擠等服務品質的衡量,均可進行預測。 TRANSIMS 使用細胞式自動程序(Cellular Automata Approach)來建立交通 車流模式,並將道路分為均勻的段落,每一段落即代表一個細胞,其長度恰為擁 塞車流的間距(2.5 呎或 7.5 公尺) 車輛在這些細胞中的位置是每一秒鐘均會予 以更新,因此可以在相當大的交通路網以合理`的電腦時間來模擬每一部車輛頗 為詳細的情況。
(4)VISSIM
GmBH)所發展的微觀車流與大眾運輸模擬模式。此模式可在某些條件下,諸如 車道佈設、交通組成、交通號誌、資訊可變標誌、大眾運輸停靠站、不同等級的 大眾運輸系統與號誌化路口輕軌運輸優先通行等,模擬分析複雜的交通狀況與大 眾運輸系統的營運。VISSIM 模式以微觀交通模擬模式 MISSION 為基礎(該模 擬模式乃是以行為門檻跟車模式為基礎)。交通車流模式(主程式)包含跟車行 為邏輯與變換車道邏輯,號誌控制模式(副程式)則根據每秒收集之偵測器資料 決定目前的號誌時制,若配合外掛的號誌狀態產生器VAP,則可用以分析使用者 自設之號誌控制邏輯,主要應用於都市街道或高速公路的車流模擬研究,並以介 面方式引入「交通控制系統」。VISSIM 具有圖形使用者介面,允許使用者在現 有的交叉路口、交流道與道路配置的基本圖加入交通與號誌的資料。此一獨特的 能力不僅能減低資料輸入時的工作負荷,而且可以大大地改善交通與大眾運輸系 統營運的動畫品質。 (5)PARAMICS 基於ITS研究發展上的需要,英國蘇格蘭一群具有專業交通背景的電腦工 程師,從西元1992年開始致力於研發先進的微觀車流模擬模式-Paramics (即Parallel Microscopic Simulation 之縮寫)。
此模式主要包含五套應用軟體,:模式程式器(Paramics Modeller)為模擬 路網建構的最主要模組,提供模擬路網構建、模擬過程動畫顯示(包括三度空間 立體顯示),以及互動式圖形化介面的統計值即時輸出。使用者可透過模組提供 的圖形介面來輸入道路與交通資料以構建路網。處理程式器(Paramics Processor) 可提供使用者設定批次(Batch)處理模擬之功能,以增加模擬速度,便於進行 各項敏感度測試。分析程式器(Paramics Analyser)用來顯示並分析模式程式器 與處理程式器所得結果之模組,功能包括讀取模擬模式、提供GUI(Graphic User Interface)比較模式、及分析不同的測試結果。監測程式器(Paramics Monitor) 可依據使用者定義的污染物形式,模擬污染水準以及汽車速度及加速度所造成的 污染程度。程式開發器(Paramics Programmer)是 Paramics 模擬程式與使用者定 義之程式間的有利介面。本模組以功能性介面(Functional Interface)、應用程式 介面(Application Programming Interface)等兩種介面為主。實作上,亦可利用 網路模組(Network Socket)的服務,利用網路與另一台機器執行系統模組,平 行處理交換模擬資料。
(6)MIcroscopic Traffic Simulation (MITSIM)
Microscopic Traffic SIMulator 這套軟體的功能是為了建構路網中之交通車 流,且包括提供先進交通控制與路徑指引系統,而此軟體所提供的微觀交通模擬
所用到的模式包含跟車模式、車道變換模式、交通號誌反應邏輯、路線選擇模式 以及路線轉換模式。
路線選擇模式針對未被指派路徑的車輛進行指派,其旅行成本之計算是根據 歷史資料的記錄或者即時路徑旅行時間,計算方式決定於該車輛是否有路徑導引 系統與否,若有,則以及時資料為主;無者則以歷史資料來推估。其路徑選擇所 使用的演算法是使用Label Correcting Algorithm。路線變換模式是在車輛已被事 先預定路徑的情況下才會被使用到。當行駛途中碰到車禍或者種種道路堵塞的原 因,則車輛還必須選擇另一條替代道路來行走。跟車模式用來代表車輛與前車之 間的關係,以計算車輛的加速度。在某些情況下,此模式還會由子模式來計算加 速度,即:A. 在有兩條以上的車道合併成單一車道時的跟車狀況;B. 讓其他車 超車併入該車道時。依據車間時距 (headway) 的大小,跟車階段 (regime) 又可 分為自由流動、跟車與緊急減速三種。執行車道變換的時候必須考量到當時的交 通狀況、該車起訖點、駕駛行為。
2 . 5 小 結
交通運輸領域將要跨入智慧型運輸系統(ITS)的時代,在發展眾多理論之 時,普遍的瓶頸都在於對各種理論策略無法預先評估其優缺點;且若每個理論都 在實務上應用,容易造成重大社會成本。另外一般而言,在真實情境(real world) 下所產生之真實交通資料(real data)較不易蒐集;因此,模擬資料便成為另一 可用之主要資料來源。所以,可供模擬ITS 交通系統環境之先進式車流模擬器, 便成為ITS 研究發展領域中,賴以測試與評估的重要工具之一。 在號誌設計的考量下,大都以甲種車為主要考量,而非以機踏車輛為主要考 量,且因交通部運研所過去有對於TSIS 於國內道路狀況適用性進行測試,因此 本研究使用TSIS 為主要模擬分析之工具。在各種號誌時制轉換方式中,由姜智 翔[1]以運研所時制轉換方法為基礎,以需求變動的角度來研擬時制轉換方法, 以決定轉換時段中各時相的長度,使轉換時段內之車流在較合理的情況下紓解的 時相補償法與時制重設法有較佳之績效,該研究只有針對二時相號誌進行研究分 析,本研究將延續其轉換方式精神,改善後,對於轉換方式進行較詳細實驗,其 中將包含多時相轉換、重疊時相轉換以及界定最佳轉換長度。在績效指標部分, 對照TSIS 模擬所提供之分析指標與文獻回顧,選定以平均速率、平均延誤時間 做為評估績效指標。表2-2 時制轉換法比較一覽表 方法 名稱 特點 限制 不同 時相數 轉換 重疊 時相 轉換 突變氏 轉換法 可於時制轉換點時立即執行 新時制,以符合目前之流量水 準,使新時制得以提供其最大 效率 無法處理由於時相突 然轉換以及新、舊時制 中各時相長度差距過 大時可能產生的衝 突、危險及停等。 可使用 可使用 主要道 路綠燈 延長法 可確保大部分的幹道車流在 無意外狀況下得以於路口紓 解。 僅限於時制轉換點恰 落在幹道綠燈時相時 適用,且可能使得幹道 綠燈時間過長,造成其 他臨進路段之流量較 大的平均停等延誤。 可使用 可使用 漸進式 轉換法 在新、舊時制中各時相長度差 距過大時,可以較平緩的方式 進行轉換,以避免由於綠燈時 間巨幅縮短造成上游車輛壅 塞,或是綠燈時間巨幅增加, 造成其他路段車輛壅塞的情 形。 所需之轉換時段較 長,無法立即執行新時 制,以符合目前之流量 水準,使新時制得以提 供其最大效率。 無法 使用 無法 使用 基本突變 轉換法 即當到達號誌轉換起始時間 時,舊時制號誌時相會繼續執 行至該時相結束,並開始執行 清道時間,到清道時間結束 後,就可執行新時制週期。新 時制中的起始時相乃是任意 的實施,並且不需注重轉換時 相進行的順序。 在進行中的轉換時相 必須遵守最小綠燈的 限制 可使用 可使用 改良式突 變轉換法 與上述基本突變轉換法十分 近似,僅有的差異係於時制轉 換時段中,必須決定在新時制 計畫下執行的轉換'轉換時 相。 可使用 可使用 最大綠燈 轉換法 可完全避免任一時相產生極 短綠燈的情形,以避免可能產 生的衝突及危險,並且確保各 時相之車流有充分的綠燈時 間得於路口紓解。 由於轉換時段中各時 相之長度皆較長,可能 不符合當時的流量水 準,而造成路口績效較 無效率,且無法在較短 時間內開始執行新時 制計畫 無法 使用 無法 使用
傾斜 轉換法 確保任一時相皆不會在時制 轉換過程中被遺漏,且各時相 亦不會產生極短綠燈的情形。 所需之轉換時段較 長,無法立即執行新時 制,以符合目前之流量 水準,使新時制得以提 供其最大效率。 無法 使用 無法 使用 鞍點 轉換法 可確保所關切時相(關鍵轉換 時相)之綠燈時間滿足於目前 之流量水準,且亦可維持妥善 的時相順序,確保任一時相不 會在時制轉換過程中被遺漏。 若在不會違反最小或 最大綠燈的情況下,僅 限於將轉換時段中之 各時相延長或縮短三 分之一。因此若違反上 述原則,此方法可能即 無法作業。 可使用 可使用 時相補償 法與時制 重設法 以需求變動的角度來研擬時 制轉換方法,以決定轉換時段 中各時相的長度,使轉換時段 內之車流在較合理的情況下 紓解。 可使用 缺少 例證 可使用 缺少 例證
第三章 研究方法
本章節將逐一說明整個研究之範圍暨相關假設、所使用之模擬器與外掛程 式,以及對於簡單二時相、複雜多時相與/或重疊時相所訂定之號誌時制轉換流 程與模式架構。3 . 1 系 統 界 定
本研究以獨立號誌路口預設時制為對象,並基於以下假設條件進行時制轉換 設計與分析: 1. 可獲得的資訊僅限於路口各時段的預設時制計劃。 2. 路口無車流偵測器,無車流轉向等歷史資料;車流到達型態為已知;號 誌路口相關條件,包含尖峰小時因素、預設飽和度、飽和車間距等參數 為已知。 3. 假設各路段之自由車流速率為一固定值。 4. 基於號誌路口車隊依序紓解之特性,故僅針對四輪以上之小汽車車種進 行分析,不考慮機慢車與行人對時制設計之影響。 5. 路口幾何型態與車道佈設如圖 3-1 所示。多時相與重疊時相號誌設置之 目的為紓解某特定轉向(如左轉)而設置,因此本研究設置東西方向之左 轉槽化專用道。 圖3-1 TSIS路口幾何架構圖基於以上之假設條件,本研究在建立與探討當需求型態改變連帶號誌時制也 須改變時,不同號誌時制間之轉換流程。為因應不同時制計畫的時相組合與順 序,本研究同時研擬多時相時制與/或重疊時相轉換設計所應採取的方式。 時相轉換方法是在使路口某一流動方向之車流於對應的時相內全數紓解的 前提下,進行時制轉換時間的計算與分配之方法,所謂全數紓解是指某一時相之 綠燈時間,可以恰好將之前紅燈時間產生之車隊與綠燈時間到達之車輛數消散而 言。在沒有路口歷史流量資料之情況下,本研究以美國1997 年版公路容量手冊 (HCM)採用臨界車道及臨界流動的概念來計算號誌週期,以之作為時制設計方法 之基礎;週期長度與路口總臨界流量之關係為式(12):
( )
v c PHF h V N t C k N k k L k / ) / 3600 ( 1 1 ( , ) × × − × =∑
Φ ………(12) h PHF( )
v c C N t V k k L k, ) (1 ) (3600/ ) / ( × × × × − =∑
Φ ………(13) Ck =∑
G(k,Φ) +tL×Nk………(14)∑
Φ Φ Φ = − × × Nk k k k L k k V V N t C G 1 ) , ( ) , ( ) , ( ( ) ………(15) 其中 h 飽和車間距 (秒) L t 每一時相損失時間 (秒) k C 第k週期之號誌週期長度 (秒) k N 第k週期之總時相數 Φ 時相Φ , Φ =1~N k ) , (kΦ V 第k週期之時相Φ 之臨界流量 (輛/小時) k 週期順序編號 PHF 尖峰小時因素 c v / 飽和度 ) , (kΦ G 第k週期之時相Φ 之有效綠燈長度 (秒) 由上式(13)~式(15)可以在沒有路口車流資訊之情形下,以號誌週期與各時相 時間推估各時相之臨界流量;而在本研究的轉換流程中,則是會推估各時相之臨界流量,再以式(15)計算每個週期中每個時相所需要的綠燈時間與週期長度。獲 得的週期長度與時相長度資料,在傳輸給TSIS 的外掛程式-執行延伸介面 (run-time extension , RTE),由該程式來控制 TSIS 中路口號誌時制的執行。
3 . 2 T S I S R T E
本研究使用美國聯邦公路局所研發之交通軟體TSIS 進行號誌路口之車流模 擬與分析,以探討本研究所設計之號誌轉換模式,在各項測試條件之下的績效。 本研究因為使用TSIS 為模擬分析工具,但因為 TSIS 主程式的號制設定需要在進 行模擬前設定完成,無法使用演算法之方式進行變化時制的設定而顯得彈性不 足,因此使用TSIS 之外掛軟體「執行延伸介面」(run-time extension , RTE),進 行轉換時制之演算法撰寫與模擬分析。 美國聯邦公路局 (FHWA)所發展的整合交通系統軟體(TSIS)是一種可提供 使用者處理多種交通運行環境的平台,它也是許多交通研究中所廣泛使用的專業 軟體。TSIS 以 CORSIM 為執行核心,使用者使用其介面輸入模擬的參數資訊, CORSIM 在依據這些參數的設定呼叫其內部的屬性以及計算模式,經由計算後的 路網與車輛等資訊會暫存在記憶體中,作為下一個模擬流程的輸入資訊,最後在 經由其介面將結果輸出成檔案資訊。為增加一般使用者使用上的方便,TSIS 的 號誌有預設號誌轉換流程,及可設定號誌週期數量上的限制,而為讓進階使用者 可依據其需求進行號誌等資料設定, TSIS 提供一個開放式架構之外掛程式能與 CORSIM 執行核心直接聯繫。 上述之外掛程式稱為執行延伸介面(RTE),此程式不但可以改變號誌時誌之 設計,也可以提供道路監控、事件偵測與產生(封閉或開放任意車道)、以及匝道 儀控、公車監控等相關功能。執行延伸介面(RTE)可用於建立新的號誌邏輯,以 取代CORSIM 預設邏輯,也可補充或替換目前現有的號誌邏輯,以填補中預設 邏輯的不足。執行延伸介面是以開放軟體方式撰寫,只要使用C++程式語言軟體 即可編撰。 圖3-2 說明了 TSIS 中 CORSIM 的各項操作架構,包含了各個介面以及執行 延伸介面的運作。每個方塊代表了一個組件模式(Component Object Model , COM) 介面,各介面間則依靠動態連結程式庫(dynamic -link library , DLL)進行鏈結。在 這些模組中,CORSIM 驅動元件可將 CORSIM 各項屬性資料傳輸至核心程式使 用,並將計算後之資料傳輸至TShell 介面以圖形方式呈現至視窗中。
在模擬程式中,每次程式之迴圈稱為一個時間步階(Time Step),在一個步階 起始時CORSIM 核心程式會將其需要之功能與參數屬性由驅動元件呼叫至主程 式中,以協助各項子程式之模擬。當啟動執行延伸介面時,CORSIM 主程式會呼 叫函數輸出功能,在每個時間步階執行前,將執行延伸介面所需要的資訊傳送給 執行延伸介面,如圖中所示之「1」;而經由執行延伸介面所計算出的模擬相關資 訊或需要輸出的文字訊息也可在執行延伸介面處理後,傳送回CORSIM 主程式 修改屬性或作為傳送文字訊息用,其流程如圖中所標示之「2」;除此之外,執行 圖3-2 執行延伸介面RTE示意圖 延伸介面也可以由兩者使用之共享記憶體,直接存取CORSIM 中的資料結構。 共享記憶體所包含之資訊,可讓執行延伸介面擷取模擬時的即時資訊,也可以讓 執行延伸介面直接修改模擬中的資料。如圖中所標示之「3」;最後,執行延伸介 面可以直接呼叫CORSIM 輸出函數,作為輸出其他文字結果之用。如圖中所標 示之「4」。 本研究採用執行延伸介面,將時相補償模式編寫為號誌轉換邏輯的執行程
式,用以取代TSIS 預設之號誌轉換邏輯,再經由模擬技術將現實中難以達成的 相同假設環境做多次實驗,以進行時相補償模式的情境分析。
3 . 3 時 相 補 償 模 式
本節針對前述時相補償模式之觀念進行建構,並以二時相時制轉換為多時相 時制為例加以說明。3.3.1 模 式 架 構
本時相補償模式,除了可適用於一般相同時相數與時相順序之時制轉換外, 也可應用於不同時相數之間 與/或 重疊時相之間的時制轉換;換言之,對於時制 轉換前、後時相型態與時相數不相同之時制控制計畫都可使用本時相補償模式進 行轉換。 本模式的發展是以時制設計的角度為出發,為配合考量多時相與/或重疊時 相間之轉換,假設車輛轉向型態是以每個車流轉向佔用一車道為基礎。其理由如 下:一般道路幾何設計典型之車道佈設型態如圖3-3 所示,就簡單二時相設計而 言,圖3-3 中的各佈設型態皆可適用,但型態一的共用車道方式無法在時制轉換 時改為多時相設計,因此在號誌設計時,可將左、右轉車流量乘以一轉向當量後 併入直行車流量中;車道佈設型態二之左車道,為左轉兼直行車輛使用,但在左 轉車流量較高時會阻擋直行車輛,故常導致直行車輛改用右車道行駛,左車道事 實上可視為左轉專用道 (a defacto left turn lane),而右車道之右轉車流量則可併 入直行車流量計算;同理車道佈設型態三與型態二類似。在號誌設計時,型態一 由於幾何型態的關係,無法設置多時相號誌,多時相號誌常只使用於型態二、 三、,因此,本研究在時制設計時採每一個轉向車流佔用一車道為之假設。一號誌時制中之時相Φ 係取決於臨近路段時相 Φ 內各轉向a之總和為計算 之基礎,稱之為臨界流量,因此在第k週期中總臨界流量乃為
∑
k Φ N k V 1 ) , ( ………... ….... …...……(16) 每一時相之臨界流量 ( ,Φ) Max{ ( , ), (k,Φ)} a a k k v a M V =∑
∀ ∈ 其中: ) , (kΦ M 第k週期時相Φ 所包含轉向a之集合 ) , (kΦ V 第k週期之時相Φ 之臨界流量 (輛/小時) ) , ( ak v 第k週期之轉向a之流量 (輛/小時) a 路口轉向編號, a=1,2,... k 週期順序編號 Φ 時相Φ , Φ =1~N k 號誌週期之計算方式如式(17) 所示,其中之飽和車間距、飽和度,以及尖 峰小時因素採用路口平均值進行計算:( )
Φ Φ Φ Φ × × − × =∑
c v PHF h V N t C k N k k L k / ) / 3600 ( 1 1 ) , ( ………(17) 其中: k C 第k週期之號誌週期長度 (秒) Φ PHF 時相Φ 的尖峰小時因素 Φ ) / ( cv 時相Φ 之飽和度 Φ h 時相Φ 之飽和車間距(秒) L t 每一時相損失時間 (秒) k N 第k週期之總時相數步驟二 步驟三 步驟五 推算在此號誌週期內 之流量所產生之改變 計算之前週期所產生 紅燈車輛累積加上該 時相綠燈時間所累積 之車輛數,需要由該 時相綠燈時間紓解 下一時相進行分析 至一週期內所有時相 皆已經完成計算 比對時制轉換作業 所形成之號誌時制週期 是否與轉換後號誌時制 週期相符 轉換完成 以轉換後號誌時制週期 執行 獲得轉換前後號誌 時制資料及轉換點 時間並以最小可行 週期方法推算轉換 前後各時相臨界流量 至轉換點時是否仍有 時相尚未執行完畢 是 至轉換點時所執行之 時相已經執行長度 是否達到最小綠燈時間 否 進入轉換作業 補償模式 步驟一 步驟四 至轉換點時就時制剩餘 未執行之時相皆執行至 最小綠燈時間 是 否 結束該時相 該時相執行至 最小綠燈時間 累計時相結束時 各方向產生之累積 執行所計算出的 號誌週期時相 依照新號誌時制臨界方向 與路口到達率計算所需要 之各時相號誌時間 圖3-4 時相補償模式流程圖