海流發電系統之輸入功率田口方法分析及儲能轉換器設計
蘇琨祥1、李立翔1、郭見隆2 1. 國立高雄應用科技大學 電機工程學系 2. 國立高雄第一科技大學 系統資訊與控制研究所 E-mail : [email protected]摘 要
本文主要目的為海流發電系統之研究,利用造流單元模擬海流狀況,藉以評估海流能對一永磁同步發電機 之發電量的影響以及發電機特性。並藉由電機特性之參數進一步評估該海流發電系統之可行性。並且測試海流 發電系統後級轉換器,其中包括儲能系統以及穩壓電路,提高系統之穩定度,轉換器之控制是由Microchip 單晶 片 dsPIC30F4011 所控制。並且為了達到較佳發電機輸入功率效能,將利用田口方法對海流發電系統之水流流 速、扇葉內徑及齒輪比等參數進行最佳化設計。 關鍵詞:永磁同步發電機、儲能系統、田口方法、輸入功率1.前言
近年來,隨著工業科技的進步,人口的快速成長以及經濟的起飛全球對於能源的需求與日增,需要傳統能 源如煤、石油、天然氣等石化能源(Fossil Energy)來提供電能的轉換,不僅對於地球上有限的石化能源存量迅 速衰減之外,而轉換過程也對地球的生態環境造成不可彌補的破壞。因此無污染之再生能源(Renewable Energy) 的研究已經是世界各國重要的研究目標和重點方向之一,目前世界上較具發展潛力的再生能源有風能(Wind Energy)、太陽能(Solar Energy)、地熱(Geothermal Energy)、海洋能(包含海洋溫差、波浪、潮汐及海流)和生 質能(Biomass)等。 然而就目前的再生能源來看,台灣的水力發電發展有限,不穩定且風力強度不高;太陽能與生質能的發展, 受限於土地面積因素,發展也困難。黑潮發電是台灣很好的機會。黑潮發電的優點在於「乾淨」,零二氧化碳排 放且發電量大,發電裝置容量可達60GW(百萬瓩)。台灣目前總發電裝置容量約34GW[1]、[2]、[3]、[4]、[5]。2. 海流發電系統發電機之摸擬分析
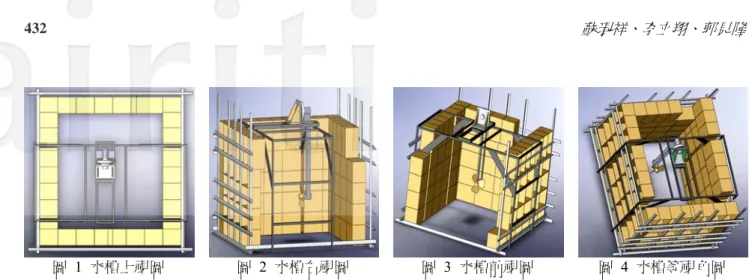
以目前發電機之設計與技術而言,感應發電機之使用仍是較為成熟的實用技術,但由於考慮的動能來源係 為一不穩定能量之海流,因此當發電機未能操作於適當轉速時,將造成效率低落的問題,因此本文將選用永磁 式發電機作為一發電主體,雖有同上的缺點,但相較於感應發電機而言,因永磁式發電機設置有永久磁鐵,相 對的將能提高整體的發電效率[6]、[7]。 2.1 模擬海流水槽之實驗 為了探討實際上海水流動情況,我們設計了一個水槽實驗,圖 1 至圖 4 為 3-D 立體圖各視角圖,水槽主要 是以支撐木架、角鋼以及帆布所搭建,本文造流機是利用一台直流馬達轉動皮帶帶動水渦輪機而產生水流,且 利用齒輪與鏈條結構,帶動發電機,利用面對面的渦輪結構,左邊的渦輪機則受到水流的作用,產生旋轉,經 由齒輪帶動發電機,如此便為水槽模擬實驗。在渦輪機結構設計方面,提出了六段變速齒輪鏈條結構,此結構 之優點為水流量不大時,產生的力矩過小不足以帶動水輪機,此時須用小齒輪帶動發電機,反之,若水流量很 大則可使用大齒輪帶動發電機,如此發電機便可提供更大的轉軸輸入功率效益。圖 1 水槽上視圖 圖 2 水槽右視圖 圖 3 水槽前視圖 圖 4 水槽等視角圖 2.2 永磁式發電機規格 本文中所用的永磁式發電機極數為24 極,定子槽數 36 槽,電樞繞組纏繞方式為單層集中繞法,匝數為 90 匝,永久磁石使用NEOMAX-48BH,矽鋼片則選用 M19-0.50mm,圖 5 至圖 8 所示為永磁式發電機各部位之實 體照片。 圖 5 發電機結構示意圖 圖 6 發電機轉子實體圖 圖 7 發電機定子實體圖 圖 8 發電機本體 2.3 發電機之模擬結果 本章節將田口法相關數據如表 1,田口法實驗方法是將發電機的三相交流電利用橋式整流器,將交流電轉 換成直流電,負載將選取200 的純電阻性負載加以分析,圖 9為量測示意圖,模擬軟體MagneForce也依此方 法模擬出發電機相關數據如表 2。模擬與實際値相差不遠,可提供往後實驗參考。 Ω Ω 圖 9 量測示意圖
表 1 田口法實驗數據 發電機電壓 (V) 發電機電流 (A) 發電機頻率 (Hz) 發電機轉速 (r.p.m.) 發電機轉軸 輸入功(W) 發電機輸出 功(W) 發電機效 率 實驗1 104.6 0.54 47 235 73.85 54.71 0.74 實驗2 96.7 0.48 42.44 212.2 59.27 46.75 0.79 實驗3 132 0.67 61.32 306.6 119.54 87.12 0.73 實驗4 132.4 0.69 59.1 295.5 118.66 87.65 0.74 實驗5 36.3 0.23 15.95 79.75 10.67 6.59 0.62 實驗6 28.1 0.16 12.12 60.6 5.64 3.95 0.7 實驗7 69.4 0.34 30.06 150.3 29.74 24.08 0.81 實驗8 54.7 0.28 21.65 108.25 17.64 14.96 0.85 實驗9 103.8 0.53 46.8 234 72.17 53.87 0.75 實驗10 95.4 0.48 42.38 211.9 59.18 45.51 0.77 實驗11 136.2 0.7 61.99 309.95 126.26 92.75 0.73 實驗12 133 0.67 59.05 295.25 115.12 88.45 0.77 實驗13 32.2 0.15 15.75 78.75 6.87 5.18 0.75 實驗14 30.1 0.17 12.39 61.95 6.13 4.53 0.74 實驗15 65.8 0.33 30.34 151.7 29.13 21.65 0.74 實驗16 50.6 0.26 22.48 112.4 17.01 12.8 0.75 表 2 模擬結果 發電機電壓 (V) 發電機電流 (A) 發電機頻率 (Hz) 發電機轉速 (r.p.m.) 發電機輸入功 (W) 發電機輸出功 (W) 發電機效率 實驗1 103 0.517 47 235 74.1 55.6 0.75 實驗2 93.4 0.467 42 212.2 61.6 45.4 0.737 實驗3 135 0.673 61 306.6 120.4 93.8 0.779 實驗4 130 0.649 59 295.5 112.5 87.2 0.776 實驗5 34.5 0.173 16 79.75 11.26 6.37 0.566 實驗6 25.9 0.13 12 60.6 7.22 3.64 0.504 實驗7 66 0.33 30 150.3 33.2 22.8 0.687 實驗8 47.3 0.237 22 108.25 18.79 11.8 0.629 實驗9 103 0.515 47 234 73.5 55.1 0.75 實驗10 93.2 0.466 42 211.9 61.4 45.3 0.737 實驗11 136 0.68 62 309.95 122.8 95.8 0.78 實驗12 130 0.648 59 295.25 112.3 87.1 0.775 實驗13 34.1 0.17 15.75 78.75 11.03 6.21 0.563 實驗14 26.5 0.133 12.39 61.95 7.48 3.81 0.51 實驗15 66.6 0.333 30.34 151.7 33.8 23.3 0.688 實驗16 49.1 0.246 22.48 112.4 20.1 12.8 0.636
3. 系統硬體轉換器架構
本章節主要探討海流發電後的硬體電路,其中硬體電路包含主動式功率因數校正(Power Factor Corrector)、 返馳式轉換器(Flyback Converter),推挽式轉換器(Push-Pull Converter)及單相全橋式換流器,整體硬體架構可參 考圖 10。可由圖 10可看出將海流發電經由功率因數校正後將交流電轉換成直流,再將直流電送至單相全橋式 換流器轉換為交流電送至負載端。在此也利用UPS概念,當海流發電時將對電池充電,若海流無法發電時,系 統將由電池供電,利用返馳式轉換器升壓供給負載所使用,其中各轉換器控制由Microchip單晶片30F4011所控 制,以上硬體電路本章節將一一介紹。 圖 10 整體硬體架構圖 3.1 功率因數校正原理 目前功率因數校正所使用方法主要可分為主動式功率因數校正與被動式功率因數校正兩種,而被動式功率 因數校正主要是經由被動元件所組成,應用低頻儲能元件將電流高頻訊號濾除與相位補償,藉此達到功率因數 校正目的,但因負載特性複雜且多變,故一般較常應用主動式功率因數校正,此方法也是本論文所使用之控制 方法。主動式功率因數校正中較常被使用的轉換器為升壓轉換器(Boost Converter),如圖 11所示為升壓轉換器 的電路圖與基本元件。 1 S 1 D 1 L
C
V
0 ACV
圖 11 升壓轉換器電路圖3.2 功率因數校正晶片 L4981 原理 L4981 為 ST 公司所生產應用平均電流控制法之主動功率因數校正晶片,其內部電路圖 12。 圖 12 L4981 內部電路圖 其各腳位說明如表 3。 表 3 腳位說明 腳位 說明 腳位1 功率級地端 腳位2 線電流峰值限制,此電壓為零時,PWM 輸出為低電位 腳位3 過電壓保護輸入,當此輸入電壓高於5.1V 時,PWM 輸出為低電位 腳位4 乘法器的輸入電流 腳位5 電流誤差放大器輸出 腳位6 取負載部分電壓輸入此接腳可修改內部乘法器之輸出電流,當未使用時將此腳位接至參考電壓 腳位7 VRMS 輸入,電壓範圍為 1.5 至 5.5V 腳位8 乘法器輸出腳位,亦為電流誤差放大器非反相輸入端 腳位9 電流誤差放大器反相輸入端 腳位10 輸出控制訊號地端 腳位11 参考電壓輸出 腳位12 軟啟動設定腳位 腳位13 電壓誤差放大器之輸出 腳位14 電壓迴授端 腳位15 可規劃下臨界電壓 腳位16 同步輸入與輸出控制腳位 腳位17 電阻控制 PWM 頻率腳位 腳位18 電容控制 PWM 頻率腳位 腳位19 電源輸入腳位 腳位20 功率晶體驅動訊號
3.3 推挽式轉換器 一般的基本直流-直流轉換器,若遇到下面場合將無法適用,輸入與輸出端之間需要隔離(Isolation),輸入與 輸出電壓之間大小相差倍數時。因此,為了符合上面兩點需求,則衍生一些具有隔離作用之高頻直流轉換器, 稱之為推挽式轉換器如圖 13 所示: C R L L i 1 D 2 D 0 I 1 S N 2 S N 1 P N 2 P N S i 1 Q 2 Q S V L V 0 V 1 P V VS1 圖 13 推挽式轉換器電路圖 3.4 返馳式轉換器 本論文將返馳式轉換器應用於隔離型升壓轉換器,此電路主要目的是將電池電壓12V 轉換為 140V 的直流 電壓,再透過全橋式換流器轉換成交流電壓提供交流負載,圖 14 為返馳式轉換器電路圖: 1 D 1 T 1 I S V 1: n 1 Q 0 I R 0 V C 2 I 2 V s N p N 圖 14 返馳式轉換器電路圖 3.5 單相換流器 將一直流電壓轉換成所需之交流輸出電壓及頻率,稱為變流器(inverter),又稱為直流-交流轉換器(DC-AC converters)。控制方法有以下兩種。 3.5.1 改變直流輸入電壓 可利用相位控制法,調整閘極觸發延遲角可以得到可變輸出電壓。此方法之優點在於輸出波形含有 諧波成分,不會因輸入直流電壓準位改變而有很大差異。缺點在於變流器之電流換向能力隨輸入直流準位而 變,且為了得到更平滑之輸入直流電壓必須前置一濾波器,不過,相對地使系統響應的時間降低。 3.5.2 脈波寬度調變控制 改變觸發信號脈波寬度可以控制其輸出電壓。此變流器又稱為脈波寬度調變型變流器。故由上述控制變 流器本論文選用第2 種脈波寬度調變控制,而理想換流器的輸出波形應為正弦波;不過事實上輸出波形是含 有諧坡成分之非正弦波。在低中功率應用場合上可接受,但若大功率輸出電壓之諧波成份。變流器相數大致 可分為單相變流器與三相變流器。
單相換流器之橋式電路架構可分為半橋式與全橋式,如圖 15所示,藉由控制開關元件可將直流電源轉 換為交流電輸出。本文則採用全橋式之架構,在相同的輸入電壓下,全橋式換流器的輸出電壓為半橋式的兩 倍,即在相同輸出功率下,全橋式開關容量及電流景為半橋式的一半,因此在較高功率的場合一般均使用全 橋式換流器。 2 S V 2 S V 1
S
SV
4S
3S
2S
U V 1S
2S
U V SV
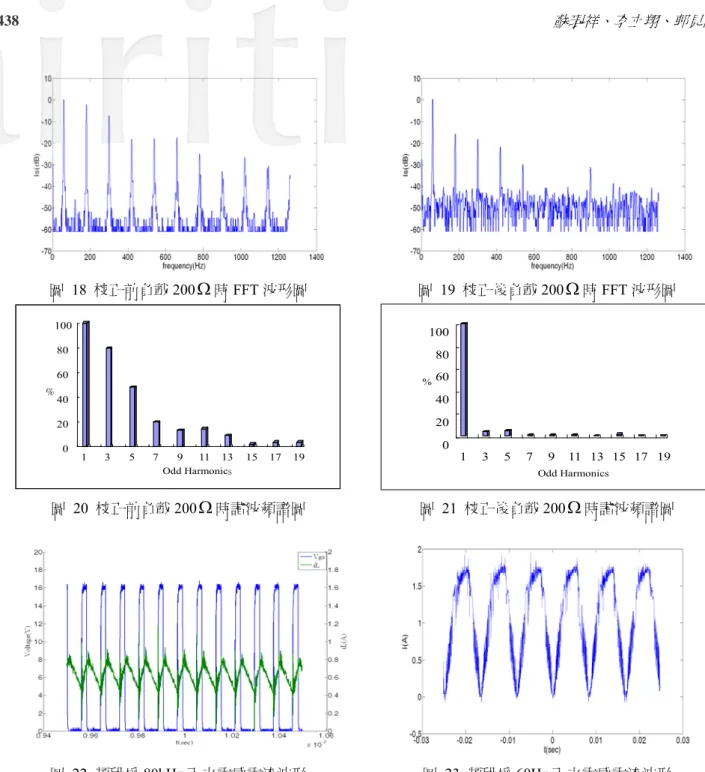
(a)半橋式換流器 (b)全橋式換流器 圖 15 單相換流器電路架構 3.6 硬體電路實驗結果分析與探討 本章節針對各轉換器做各項實驗,其中功率因數校正是以負載實驗做測試,針對各不同負載做校正前與校 正後的改善情形。推挽式轉換器則針對充電時定電流的暫態上升時間以及定電壓暫態上升時間。返馳式轉換器 針對穩壓暫態時間做探討。 3.7 功率因數校正電路校正量測 功率因數實驗方式是利用水泥電阻串並聯的方式作為純電阻性負載,電阻值分別為 200 輸出端電壓則穩 定輸出150V,分別做校正前與校正後之功率校正情形,分別量測不同負載狀況下的交流測電壓、電流以及總諧 波失真率,如圖 16,負載 200Ω可看出圖 16 與圖 17,修正狀況,可看出圖 17 的電流已修正為正弦波,且圖 19 也可看到奇次諧波也明顯改善,並可以由圖 22 可看出電感充放電狀況,並且操作在連續模式下,而圖 23 為頻 段60Hz 下的電感電流波形圖。Ω
圖 16 校正前負載 200 時電壓電流圖 Current Voltage Current VoltageΩ
圖 17 校正後負載 200Ω
時電壓電流圖圖 18 校正前負載 200
Ω
時FFT 波形圖 圖 19 校正後負載 200Ω
時FFT 波形圖 0 20 40 60 80 100 % 1 3 5 7 9 11 13 15 17 19 Odd Harmonics 0 20 40 60 80 100 % 1 3 5 7 9 11 13 15 17 19 Odd Harmonics 圖 20 校正前負載 200Ω
時諧波頻譜圖 圖 21 校正後負載 200Ω
時諧波頻譜圖 圖 22 頻段為 80kHz 下之電感電流波形 圖 23 頻段為 60Hz 下之電感電流波形 由上列各圖可看出電流與電壓相位校正之情形,經以上之量測數據後可得到總諧波失真率以及功率因數, 如表 4 所示,經過功率因數校正後功率因數可由 0.3 提升至 0.98。 表 4 校正前後比較表 負載 PF THD(%) H3(%) H5(%) H7(%) H9(%) 200 0.42 95.59527 79.5222 47.75593 19.4693 12.44965 400 0.6 103.3187 83.19785 55.44808 25.84596 3.21923 校 正 前 600 0.328 110.1048 85.23509 60.45681 33.05295 10.51286 200 0.987 6.594977 3.70678 5.21107 1.26999 0.99266 400 0.989 4.408619 2.20962 2.20962 1.79685 2.53819 校 正 後 600 0.985 4.737125 3.76684 2.35728 0.57497 1.53753.8 推挽式轉換器 推挽式轉換器輸出電壓是以穩壓14.5V 輸出,定電流以限流 2A 作為充電電流。如圖 30 所示。另以負載做 定電壓暫態實驗,可由圖 29 負載以 3.5Ω 做量測,定電壓則是利用分壓定理將輸出電壓取一回授信號做為控 制,其中圖 24 至圖 25 為推挽式轉換器的閘極信號,圖 26 至圖 27 為汲極信號,圖 28 負載的電感電流,可 由圖看出電感之充放電以及漣波電流之情形,並且操作在連續模式下。電壓穩態時間約在1.7ms~32ms,而電流 響應上升暫態時間約在3.6ms。 圖 24 推挽式轉換器Vgs1信號 圖 25 推挽式轉換器Vgs2信號 圖 26 推挽式轉換器
V
ds1信號 圖 27 推挽式轉換器V
ds2信號 圖 28 負載 3.5Ω
之電感電流 圖 29 負載 3.5Ω
之輸出電壓上升時間 圖 30 定電流上升時間3.9 返馳式轉換器 本文之返馳式轉換器是用來作DC-DC 升壓轉換器,主要功能是將鉛酸電池輸出電壓升壓至 140V,供給單 相轉換器至負載,達到放電效果。本章節主要測試返馳式轉換器升壓然後到穩壓時之上升暫態時間其控制信號 如圖 31 為閘極信號,分別利用純電阻性負載 1000Ω測試,圖 32 為測試波形。由圖可看出返馳式轉換器約在 40ms~56ms 可達到穩態。 圖 31 返馳式轉換器之
V
gs信號 圖 32 負載 1000Ω
輸出電壓上升時間輸出電壓 3.10 全橋式單相換流器 此電路是將功率因數校正電路以及返馳式電路的輸出直流電轉換成交流電,控制方法則使用脈波寬度調變 控制之雙極性切換方法,切換波形如圖 33。測試負載則選用電風扇作為負載,使用強、中阻抗分別為 、 作為測試條件,如圖 34 以及圖 35。 306.82 21.6∠ oΩ 405 0∠ o Ω 上橋閘極信號 下橋閘極信號 輸出信號 圖 33 全橋式換流器閘極信號 圖 34 電風扇中檔 圖 35 電風扇強檔4. 海流發電系統之發電機轉軸輸入功率分析與探討
本論文中以一直流電動機藉由齒輪組與皮帶連接至水輪葉片,用以模擬與產生海流帶動永磁同步發電機, 本實驗環境使用自製搭建之水槽(200cm長*137cm寬*160cm高)注入水深115cm,總水量為3.151噸,實驗環境在 固定之水容量體積下進行,直流電動機之場激磁經由電源供應器固定供給電壓160V、電流2A之功率,電樞電壓 則由220V之市電藉由一最大輸出為15A之自耦變壓器控制,供給直流電動機。 實驗中藉由改變自耦變壓器之輸出電流,分別代表不同強度之海流流速,輸出電流越高則同步電動機轉速 越快,流速亦隨之增加,電樞電流所對應之流速為14A時2.6m/s、13A時2.41m/s、12A時2.23m/s、11A時2.04m/s、 10A時1.86m/s。本實驗之架構與使用之設備如圖 36所示。 圖 36 水槽與發電機組 4.1 發電機轉軸輸入功率之量測 本章節所定義之變數y 皆為發電機之轉軸輸入功率(W)。其中發電機轉軸輸入功率計算需要發電機KΦ 值, 參數量測方式則使用一直流電動機直接耦合於永磁同步發電機,進行實際運轉以量測相關的電路參數,作為海 流發電系統的依據。永磁同步發電機反電勢常數量測,由於在旋轉的轉子電樞線圈,每一個線圈皆會因為轉子 轉動切割磁力線而造成感應電動勢,在開路實驗中可得感應電勢並且得到發電機轉速,由式(1)可得 KΦ 值。 r E=Kφω (1) 圖 37 為量測 KΦ 值動力台示意圖。表 5 為量測 KΦ 值相關數據,其中 Va 為原動機輸入電壓分為五階段, 最後取得KΦ 平均值減少誤差。在由式(2)可得發電機轉軸輸入功率。 in rI P =Kφω
(2) 圖 37 動力台示意圖表 5 量測 KΦ 相關數據 Va(V) fm(Hz)
ω
r(rad/s) KΦ 轉速(r.p.m.) 50 1.49 9.35 5.35 89.30 100 2.60 16.36 6.11 156.25 150 4.17 26.18 5.73 250.00 200 5.95 37.40 5.35 357.15 250 7.58 47.60 5.25 454.55 KΦ 平均值 5.56 4.2 田口品質工程田口品質工程法,簡稱田口方法(Taguchi Method)是由田口玄一博士(Dr. Grenichi Taguchi)所提出的一套品管 方法,其主要的工具是直交表實驗(Orthogonal Array Experiment)和信號雜音比(Signal to Noise Ratio,S/N ratio)。 田口方法又稱田口式品質工程(Quality Engineering),同時田口法亦是目前在眾多最佳化設計中最為廣受大家所 應用,主要應用於品質工程的改善,在各領域中之最佳化問題,亦都能獲得最佳的品質改善,且能提高生產效 率並降低成本以及縮短產品上市時間,因此被學術界及業界認定提升產品品質最佳方法之一[9]、[10]。其信號 雜音比如(3)。 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − = ∑ = n i yi n MSD N S 1 2 1 1 log 10 ) log( 10 / 比η (3) 其主要的控制因子如表 6。 表 6 主要控制因子 水準一 水準二 水準三 A 齒輪比 16:24(第二齒) 18:21(第三齒) 21:18(第四齒) B 水流流速(m/s) 1.86 2.23 2.6 C 扇葉內徑(m) 0.045 0.06 0.075 其中A 因子為水輪機經由鏈條帶動發電機之齒輪比,比值關係為發電機(24):渦輪機(16),B 因子為水流流 速值,C 因子為扇葉內徑。爲了取得同一扇葉特性將內徑由小變大,是將同一扇葉套上塑膠管增加內徑。 4.2.1 田口法之發電機轉軸輸入功率分析 計算自由度之和=
( )
,適用 直交表做部份因子之實驗。由於部份實驗中直交表 只 使用到3 個因子數,分別以 A、B、C 代表 3 個控制因子,y 代表 A、B、C 各因子在 9 種不同水準組合下實 驗所量測之發電機轉軸輸入功率。實驗配置結果與回應表如表 7、表 8 所示。 6 3 1 -3 × = L (34) 9 L (3 ) 4 9 表 7 案例一實驗配置結果 發電機轉軸輸入功率(W) 平均值 平均平方差 信號雜音比 A B C 1 2 3 9 L MSD y η 1 1 1 1 61.52 64.61 62.99 63.0 2.52E-04 35.987 2 1 2 2 67.8 69.7 71.8 69.8 2.06E-04 36.866 3 1 3 3 22.8 23.5 23.6 23.3 1.84E-03 27.344 4 2 1 2 40.9 42.6 44.4 42.6 5.52E-04 32.580 5 2 2 3 12.2 13.6 14.5 13.4 5.63E-03 22.497 6 2 3 1 104.3 111.4 105.5 107.1 8.75E-05 40.582 7 3 1 3 4.5 4.7 4.4 4.5 4.88E-02 13.119 8 3 2 1 86.4 86.8 83.8 85.7 1.36E-04 38.653 9 3 3 2 100.2 97.6 99.9 99.2 1.02E-04 39.931由實驗值可求出: 平均值 = _y 3 3 2 1 y y y + + (4) 平均平方差 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = 2 3 2 2 2 1 1 1 1 3 1 y y y MSD (5) 信號雜音比 η = −10 log
(
MSD)
(6) 根據信號雜音比可求出回應表,如表 8。 表 8 案例一回應表 因子 水準 A B C 1 33.4 27.23 38.41 2 31.89 32.67 36.46 3 30.57 35.95 20.99 Max-Min 2.83 8.72 17.42(
1 2 3)
1 31 A = η + η + η (7)(
4 5 6)
2 3 1 A = η + η + η (8)(
7 8 9)
3 3 1 A = η + η + η (9)(
1 4 7)
1 3 1 B = η + η + η (10)(
2 5 8)
2 13 B = η + η + η (11)(
3 6 9)
3 31 B = η + η + η (12) ( 1 6 8 ) 1 13 C = η + η + η (13) ( 2 4 9) 2 13 C = η + η + η (14) ( 3 5 7 ) 3 31 C = η + η + η (15)根據表 8 可畫出回應圖,如圖 38。 15.00 20.00 25.00 30.00 35.00 40.00 A1 A2 A3 B1 B2 B3 C1 C2 C3 A因子水準 B因子水準 C因子水準 圖 38 案例一回應圖 由回應表可找出最佳水準組合為A B C1 3 1,故最佳推定值ηopt如(16)。
(
1) (
3) (
1)
4 3 .8 4 o p t A B C η =η + η −η + η −η + η −η = (16) 接著進行變異數分析,其分析結果如表 9,其中 e 為誤差,eT為誤差調和,T 為總和。 表 9 案例一變異數分析 因子 變動(S) 自由度(f) 變異(σy2) 純動(S') 變異比(F) 貢獻度(l
) A 12.04 2.00 6.02 12.04 0.86 1.75 B 116.50 2.00 58.25 116.50 8.33 16.90 C 546.69 2.00 273.34 546.69 39.11 79.32e
13.98 2.00 6.99 13.98 2.03 Te
- 0.00 - - - - T 689.20 8.00 675.23 100.00 各因子之變動如下。 2 _ 3 2 _ 2 2 _ 1 3 3 3 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = A η A η A η SA (17) 2 _ 3 2 _ 2 2 _ 1 3 3 3 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = B η B η B η SB (18) 2 _ 3 2 _ 2 2 _ 1 3 3 3 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = C η C η C η SC (19)∑
= − = 9 1 2 i i T CF S η CF (20) 為修正項 2 9 1 9 1 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ =∑
= i i CF η (21)由式(20)與式(21)可得如下。
∑
∑
= = ⎟⎟⎠ ⎞ ⎜⎜ ⎝ ⎛ − = 9 1 2 9 1 2 9 1 i i i i T S η η (22)(
A B C)
T eS
S
S
S
S
=
−
+
+
(23) C T e e S = S + S (24) 變異計算如下。 A A A f S V = (25) T T T e e e f S V = (26) 純變動計算如下。 T e A A A S f V S ' = − (27) ' ' A T e S S S T = − (28) 變異比計算如下。 T e A A V V F = (29) 最後由表 9 可以得到 B 因子和 C 因子之貢獻度最大,即影響海流發電機轉軸輸入功率之最大因素為扇葉內 徑和水流流速。可以得到A 因子、B 因子與 C 因子之貢獻度分別為 0.28,16.9 與 79.32,貢獻圖中可看出 B 因 子與因子為影響品質特性較大之因子。5. 結論
本文是以自製造流單元模擬海流,而在實驗過程中遇到相當多問題,起先是想如何將製造一個容器能夠容 納3 噸的水以及耐壓問題,接下來就是機器上的維護,因為設備常時間的浸泡導致生鏽,再維護方面也是費一 番功夫。經水槽實驗後可歸納出因為海水偶合係數高,但是阻力也相對的高,所以與風力發電之扇葉設計有些 許不同,而選擇扇葉需要切角大,使阻力降低。海水鹽度高具有高腐蝕性易生鏽,而許多機組需要浸泡海中, 會造成機組的生鏽與損壞,所以要在海洋中架設需要考慮哪些機組放入海洋,還有維修問題都要事先考慮。而 海洋流是許多海中生物所依靠的重要資源,如何在不破壞而達到人類所需要的綠色能源,以上問題都接為探討 之議題。本文利用各級轉換器如:功率因數校正(AC-DC)、推挽式轉換器(DC-DC)、返馳式轉換器(DC-DC)以及 單相全橋換流器(DC-AC),將海流發電之能量直接饋入負載端以及儲能,有效利用海洋資源。利用田口法,可 以得知因子對海流發電的影響程度,可以利用此方法可提高本海流系統發電功率,達到最佳之組合。參考文獻
[1] H. Oman, “Magnetic braking of the Earth's rotation,” in IEEE Aerospace and Electronic Systems Magazine, Vol. 4, Issue 4, pp.3-10, April 1989.
[2] J. Werner, M. Evans and T. Bethem, “Real-time narrative summaries for NOAA’s PORTS®,“ Proceedings of MTS/IEEE, pp.1-3, , Sept. 2005.
[3] A. D. Trapp and M. Watchorn, “EB development of tidal stream energy,” in Proceedings, p.169-173, MAREC 2001.
[4] . T. Jones and A. Westwood, “Economic forecast for renewable ocean energy technologies,” presented at EnergyOcean 2004, Palm Beach, Florida, 2004.
[5] A. T. Jones and W. Rowley, “Global perspective: economic forecast for renewable ocean energy technologies,” MTS Journal, Winter, vol. 36. no. 4, pp. 85-90, 2002.
[6] K. Ouchi and T. Yamatogi, “A study on the entrainment with density current generator,” Oceans MTS Conference and Exhibition of IEEE, , pp.787-790, Sept. 11-14, 2000.
[7] H. Polinder, M.E.C. Damen and F. Gardner, “Linear PM generator system for wave energy conversion in the AWS,” IEEE Trans. on Energy Conversion, Vol. 19, Issue 3, pp.583-589, Sept. 2004.
[8] Datasheet of L4981, SGS-THOMSON, 1997.
[9] 葉怡成,實驗計劃法-製程與產品最佳化,五南,台北,2001。