國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
基 於 立 體 視 覺 之 即 時 指 向 系 統 之 誤 差 分 析
Error Analysis of a Real-time Vision-based Pointing System
研 究 生:蔡易達
指導教授:莊仁輝 教授
基於立體視覺之即時指向系統之誤差分析
Error Analysis of a Real-time Vision-based Pointing System
研 究 生:蔡易達 Student:Yi-Ta Tsai
指導教授:莊仁輝 Advisor:Jen-Hui Chuang
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
June 2007
Hsinchu, Taiwan, Republic of China
基於立體視覺之即時指向系統之誤差分析
學生:蔡 易 達 指導教授:莊 仁 輝 博士
國立交通大學
資訊科學與工程研究所
摘 要
在本論文中,我們基於立體視覺,利用兩台攝影機實作一套即時指向系統。 此系統避開以往複雜的三維重建方式,改以影像分析技術,平面投影轉換及三維 幾何等數學理論,作為系統實作的基礎。而與傳統三維重建方法一樣,本系統亦 存有誤差的問題,故本論文在介紹系統運作流程後,先檢視本系統的所有誤差來 源,了解所擷取影像特徵的誤差範圍。而後,再由已知影像上的誤差範圍,探討 影像誤差與最終重建誤差之間的關係,也探討了在最大影像誤差的情況下,重建 點的誤差上限會如何分佈。最後則介紹我們嘗試在系統中降低誤差的方法,並探 討這些方法對靜態與動態指向點重建精確與穩定度之改進。由實驗結果可知,我 們將能根據誤差分析之結果,來設計使系統能精確且穩定運作的使用者介面。Error Analysis of a
Real-time Vision-based Pointing System
Student:Yi-Ta Tsai Advisor:Dr. Jen-Hui Chuang
Institute of Computer Science and Engineering
National Chiao Tung University
ABSTRACT
In this thesis, we use two cameras to implement a real-time vision-based pointing system. Without complex 3D reconstruction processes, the implementation of the pointing system is based on image analysis, homography, and 3D geometry. Similar to 3D reconstruction approaches, the reconstruction errors also exist in the proposed pointing system. Based on the procedure of the system, we first study the error sources, and the range of extraction errors of image features. Then, we investigate the relation between image errors and the ultimate reconstruction errors, and try to find the worst-case error range in the latter with respect to a fixed magnitude of the former. Finally, we develop some methods to reduce the error range for both static and dynamic pointing actions. Based on the derived characteristic of error range of reconstruction, as observable from the experimental results, pointing systems with more accurate and stable user interface can be developed.
誌謝
本論文得以順利完成,首先必須要感謝我的指導教授莊仁輝老師。因為老師 在研究上的耐心教導,讓我對研究的領域更加了解;在生活上的叮嚀及勉勵,更 成為我未來生活的助力。再者必須要感謝三位口試委員,李嘉晃教授、賴飛羆教 授、及雷欽隆教授的建議及指導,讓本論文的內容更加完整、更加充實。 謝謝實驗室的所有伙伴,尤其是同屆的佳昱、怡伶、郁婷、光兆與宗穎。由 於大家的相互扶持及鼓勵,使得大家得以一起順利畢業。也謝謝學弟妹及學長姐 們,由於你們帶給大家的歡樂,使得實驗室的氣氛一直很和樂,也因此使得在研 究的生活並不會孤單及煩悶。在此要特別感謝泓宏及肇宏學長,在我程式及學習 上有任何問題時,你們總是不吝惜的指導,讓我在研究上可以更上一層樓。 謝謝所有資科 94 的伙伴,從大學以來大家的一同學習,每年節日的聚會, 凝聚了一股令人稱羨的向心力。也要特別謝謝俊毅、慶臻、明潛、銘丞、冠婷等 同學在生活上的陪伴及學業上的切磋。 也謝謝我的社團伙伴,尤其是玉芳、承穎、及柏翰。感謝你們的陪伴與關心, 點滴我皆感受在心裡。最後要感謝從高中一直以來的好友,建今、育瑋、以恆及 家瑋等,認識你們這群好友真的很開心。 最後,感謝一直以來支持我、為我操心的家人,以及所有幫助過我的朋友們, 僅以此篇表達我誠摯的謝意。目錄
中文摘要... I 英文摘要... II 誌謝...III 目錄...IV 表目錄...VI 圖目錄... VII 第一章 緒論...1 1.1 研究動機...1 1.2 相關研究...2 1.3 系統流程...4 1.4 各章簡介...5 第二章 系統建置...6 2.1 硬體環境...6 2.1.1 系統運作空間...6 2.1.2 軟硬體配備規格...7 2.1.3 實驗器材...8 2.2 系統運作...8 2.2.1 影像擷取...8 2.2.2 指向物追蹤辨識...10 2.2.3 指向點重建...12 2.3 總結...13 第三章 系統誤差來源之探討...14 3.1 座標量測造成的誤差...14 3.2 取像造成的誤差...15 3.3 利用 PCA 方法造成的誤差...16 3.4 經由 Homography 計算造成的誤差 ...19 3.5 總結...22 第四章 影像誤差與重建誤差之關係...23 4.1 相關數學理論介紹...24 4.1.1 平面投影轉換...24 4.1.1.1 齊次線性解...24 4.1.1.2 求解平面投影轉換矩陣...25 4.1.2 相關三維幾何運算介紹...26 4.1.2.1 三維空間中平面方程式表示法...27 4.1.2.2 三維空間中三平面求交點...27 4.2 由不同誤差半徑與不同角度做探討...284.2.1 一維雜訊,垂直與水平方向之探討...28 4.2.2 固定距離,由不同方向作探討...30 4.3 在影像最大誤差的情況下求重建點的誤差上限...32 4.4 應用...39 4.4.1 由使用者不同站位來探討...40 4.5 結論...48 第五章 靜態與動態指向誤差之探討...49 5.1 部分系統實作設計介紹...50 5.2 減少影像與重建誤差的四種方法...50 5.2.1 平均重建點以求減少誤差...51 5.2.2 平均相同時間的影像點以求減少誤差...52 5.2.3 平均多點影像點以求減少誤差...53 5.2.4 平均前一秒影像點以求減少誤差...53 5.3 四種方法在靜態指向上的實驗...53 5.4 四種方法在動態指向上的實驗...60 5.5 結論...62 第六章 結論與未來展望...63 6.1 結論...63 6.2 未來展望...63 參考文獻...65
表目錄
表 1.1 D. Laberge.[3]所提出的系統效能表。 ...3 表 2.1 實作系統所使用的硬體規格表。...7 表 4.1 以 90 度倍數角、15 度倍數角與切點所得的重建點誤差上限數據表。 (單位:像素)...38 表 4.2 三次實驗所得的重建點誤差上限範圍數據表。(單位:像素)....43 表 5.1 四種方法所得的重建點分佈範圍數據表。(單位:像素)...57 表 5.2 四種方法所得的重建點分佈範圍數據表。(單位:像素)...59 表 5.3 四種方法平均的誤差範圍。(單位:像素)...59圖目錄
圖 1.1 簡略系統流程圖。...5 圖 2.1 系統實驗實景。...6 圖 2.2 兩台攝影機在不同視角所拍攝擷取的畫面。...7 圖 2.3 實驗中當作指向物的雷射筆。...8 圖 2.4 僅僅執行影像擷取程式時,一秒鐘的時間,兩連接埠與使用的影像 畫格緩衝區的紀錄檔。其格式自左至右為編號、時間、連接埠編號、 影像畫格緩衝區的記憶體位置。...9 圖 2.5 執行所有系統程序時,一秒鐘的時間,連接埠與使用的影像畫格緩 衝區的紀錄檔。...10 圖 2.6 將圖 2.2 先轉至 HSI 色彩模型,再作二值化後的結果。 ...11 圖 2.7 從圖 2.6 找出指向物,並將之標示出來。...12 圖 2.8 指向物追蹤辨識流程圖。...12 圖 2.9 影像平面與參考平面轉換示意圖。...13 圖 2.10 指向系統的投影布幕,可看得到指向點與滑鼠游標。...13 圖 3.1 左相機所拍攝得到的連續兩張影像,(a)為It−1,(b)為I 。....15t 圖 3.2 將圖 3.1 轉換至 HSI 色彩模型後,相減得到的結果,即Idif。 ....16 圖 3.3 將圖 2.7 的雷射筆資料點放大。...16 圖 3.4 固定x座標,看 y 座標的範圍,(a)為實驗一,(b)為實驗二。17 圖 3.5 將圖 3.4(b)中的其中一群資料放大。...18 圖 3.6 x座標為時間軸,看 y 座標的變化。(a)為實驗一,(b)為實驗二。 ...18 圖 3.7 左右兩攝影機的視角影像,紅色圈起來的部份為特徵點。...19 圖 3.8 參考平面的八個特徵點座標位置示意圖。P1 ~P8為八個特徵點。 C 與1 C 則分別代表左右兩相機中心的位置。...202 圖 3.9 指向平面(布幕)的座標示意圖。...21 圖 3.10 指向平面與螢幕間的轉換示意圖。...21 圖 4.1 由指向物至指向點之三維幾何示意圖。...23 圖 4.2 改變ILS的座標,讓雜訊分佈在垂直方向。(a)為ILS的座標, (b)為重建的滑鼠座標。...29 圖 4.3 改變ILS的座標,讓雜訊分佈在垂直方向。(a)為ILS的座標, (b)為重建的滑鼠座標。...30 圖 4.4 改變ILS的座標,觀察在不同角度上,對重建點的影響。(a)為ILS 的座標,(b)為重建的滑鼠座標。...31 圖 4.5 改變IRS的座標,觀察在不同角度上,對重建點的影響。(a)為IRS 的座標,(b)為重建的滑鼠座標。...32圖 4.6 將ILS、ILE、IRS與IRE分別在90°倍數角取樣的分佈圖。...33 圖 4.7 ILS、ILE、IRS與IRE分別在90°倍數角取樣的所有重建點分佈圖。 ...33 圖 4.8 ILS、ILE、IRS與IRE分別在90°倍數角取樣,重建點誤差上限圖。 (a)x、 y 座標範圍分別設定在 0~640 與 0~480 之間,(b)將重 建點誤差上限放大觀察。...34 圖 4.9 將ILS、ILE、IRS與IRE分別在15°倍數角取樣的分佈圖。...35 圖 4.10 ILS、ILE、IRS與IRE分別在15°倍數角取樣,重建點誤差上限圖。 (a)x、 y 座標範圍分別設定在 0~640 與 0~480 之間,(b)將重 建點誤差上限放大觀察。...35 圖 4.11 ILS與ILE、IRS與IRE以數學理論求內公切線與切點,綠色與紅色點 為切點,線則為兩內公切線。(a)為ILS與ILE的模擬圖,(b)為IRS 與IRE的模擬圖。 ...36 圖 4.12 ILS、ILE、IRS與IRE以數學理論求內公切線與切點,重建點誤差上 限圖。(a)將重建點誤差上限放大觀察,(b)x、 y 座標範圍分別 設定在 0~640 與 0~480 之間。...36 圖 4.13 比較重建點的誤差上限,將在 90 度倍數角上取樣、15 度倍數角上 取樣,及以切點來求重建點誤差上限畫在一起。...37 圖 4.14 ILS與ILE、IRS與IRE以數學理論求外公切線與切點,綠色與紅色點 為切點,線則為兩外公切線。(a)為ILS與ILE的模擬圖,(b)為IRS 與IRE的模擬圖。 ...38 圖 4.15 (a)ILS、ILE、IRS與IRE以數學理論求外公切線與切點,重建點誤 差上限圖,(b)將內公切線與外公切線造成的誤差畫在一起。..39 圖 4.16 第一次實驗的站位。(a)左影像視角,(b)右影像視角。...40 圖 4.17 第一次實驗所計算出來的誤差上限。...41 圖 4.18 相對於第一次實驗,往右移約 80 公分的站位。(a)左影像視角, (b)右影像視角。...41 圖 4.19 第二次實驗所計算出來的誤差上限。...42 圖 4.20 相對於第一次實驗,往左移約 80 公分的站位。(a)左影像視角, (b)右影像視角。...42 圖 4.21 第三次實驗所計算出來的誤差上限。...43 圖 4.22 第一次實驗指向物在影像上的位置。(a)左影像視角,(b)右影像 視角。...44 圖 4.23 第一次實驗的重建點分布情況與誤差上限。...44 圖 4.24 第一次實驗左右影像做二值化後的結果。...45 圖 4.25 第二次實驗指向物在影像上的位置。(a)左影像視角,(b)右影像 視角。...45 圖 4.26 第二次實驗的重建點分布情況與誤差上限。...46
圖 4.27 第二次實驗左右影像做二值化後的結果。...46 圖 4.28 第三次實驗指向物在影像上的位置。(a)左影像視角,(b)右影像 視角。...47 圖 4.29 第三次實驗的重建點分布情況與誤差上限。...47 圖 4.30 第三次實驗左右影像做二值化後的結果。...48 圖 5.1 獲取影像時間點的分佈圖。...49 圖 5.2 將重建點以二、三、四、五點平均,再設定給滑鼠座標。(a)-(d) 分別為二、三、四、五點的平均。藍色與紅色分別表示重建點的x、 y 座標,x軸表示第幾次的重建。...51 圖 5.3 將ILS、ILE、IRS、IRE以二、三、四、五點平均,拿平均值作重建,再 設定給滑鼠座標。(a)-(d)分別為二、三、四、五點的平均。藍 色與紅色分別表示重建點的x、 y 座標,而綠色與黑色點則分別表 示ILS、ILE、IRS、IRE的 y 座標值, x軸表示第幾次的重建。...52 圖 5.4 系統畫面截圖。分別為左右兩攝影機視角的畫面。而圖中我們以藍 色線畫上的,是找到的指向物。...54 圖 5.5 利用 5.2.1 節的方法,在圖 5.4 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...54 圖 5.6 利用 5.2.2 節的方法,在圖 5.4 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...55 圖 5.7 利用 5.2.3 節的方法,在圖 5.4 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...55 圖 5.8 利用 5.2.4 節的方法,在圖 5.4 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...56 圖 5.9 系統畫面截圖。分別為左右兩攝影機視角的畫面。...57 圖 5.10 利用 5.2.1 節的方法,在圖 5.9 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統 ...57 圖 5.11 利用 5.2.2 節的方法,在圖 5.9 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...58 圖 5.12 利用 5.2.3 節的方法,在圖 5.9 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...58 圖 5.13 利用 5.2.4 節的方法,在圖 5.9 中的位置,重建出來的分佈點。 (a)-(i)分別表示系統在同個位置執行 9 次所得到的結果。 ...59 圖 5.14 利用 5.2.1 節的方法,沿著鉛直及水平的方向,各比劃六次的結果。 ...60 圖 5.15 利用 5.2.2 節的方法,沿著鉛直及水平的方向,各比劃六次的結果。 ...60 圖 5.16 利用 5.2.3 節的方法,沿著鉛直及水平的方向,各比劃六次的結果。 ...61
圖 5.17 利用 5.2.4 節的方法,沿著鉛直及水平的方向,各比劃六次的結果。 ...61
第一章 緒論
1.1 研究動機
近幾十年來,「人機互動」是相當熱門的研究領域,而人機介面的應用更是
廣泛。舉凡指向系統(Pointing System)、虛擬實境(Virtual Reality)、人臉辨識、
手勢與肢體語言的辨識等,皆屬於其範圍。在本論文中,主要則著重在「指向系 統」的部分。 「指向系統」近幾年發展出很多應用方向,一般較為廣泛應用的「簡報系 統」,即是一例。通常在大型的會議上,都會使用簡報系統,演講者透過雷射筆 射出紅點,此系統即會偵測此紅點,來判斷指向的位置並且輸入到電腦中,當此 點停留在事先定義的區域時,代表某些特定的指令輸入(如上下換頁)。另外,「智 慧型家電操控系統」也是指向系統的應用之一,先藉由分析場景空間,知道家電 設備與空間的相對位置,然後透過指向來操控家電系統。例如當使用者指向電視 機,則電視機會被開啟,如果對著電視機比劃其他手勢,則可以上下轉台。 不僅如此,指向系統還有其他許多不同的應用面,如電玩遊戲。在現今許多 遊戲機台中,有些是利用感應器來感應玩家的動作,以辨別玩家的動作軌跡。其 所須搭配的設備,包括搖桿、手槍等,有些還是較為昂貴。如果可以以立體視覺 的概念作定位,搭配影像處理的技術,則像射擊遊戲,只需要知道玩家手的朝向, 加上射擊的動作,即可完成,既不需要昂貴的設備,也可以由不同手勢與遊戲有 不同的互動。而像是「導覽系統」,現在幾乎都是讓使用者以觸碰感應、電腦滑 鼠操控、或播放影片,來進行瀏覽。但當需要對一批遊客同時進行解說時,解說 員如果使用觸碰感應式面版操控,則常會擋住使用者視線。如果使用指向系統, 則解說員即可站在較遠的位置,以手的方向作定位,既不會擋住遊客視線,亦可 以方便的和硬體設施作互動。 從上述的應用情境中可知道,根據不同的目的,系統所需要的準確度亦不相
同。在簡報系統中,如果演講者需透過指向系統來操控滑鼠,在螢幕的正確位置 下指令,則準確性就必須要高,否則將無法正確地下指令;射擊遊戲亦是需要較 高準確度的。至於家電操控系統,使用者只需要知道這些家電在環境中的相對位 置。由於家電體積較為龐大,所以只要朝向大略正確,即可作出正確的操控,其 準確度就不需要這麼高了。 無論何種指向系統,首先都必須要求指向的正確性,再者系統必須要穩定。 當系統能穩定且正確地判斷朝向後,系統即能追隨使用者的指向,而正確地移動。
1.2 相關研究
在指向系統的相關研究中,大致上是利用二維平面間的轉換關係,或以立體 視覺找出三維空間相對位置的方法,來計算出指向點。而在此節中,將介紹幾篇 與指向系統相關研究的論文,說明其系統的方法,也探討其系統效能與誤差。R. Sukthankar et al.[1]、J.-F. Lapointe. et al.[2]、D. Laberge et al.[3]提出的雷 射筆簡報系統,都只需要利用一台相機,是基於二維平面轉換的系統。在這些系 統中,都是利用平面投影轉換原理,來取得相機平面、投影平面與顯示平面間的 對應關係,然後把這些對應關係記錄下來,以供系統後續使用。當系統取得有包 含雷射點的影像時,經由影像處理的技術,找出雷射點所在位置,然後再算出其 在顯示平面的位置。當雷射點停留在事先定義的區域時,即代表某些特定的輸入 指令。在這些系統中,雷射光點在影像上的亮度必須要比背景亮,否則不易偵測 雷射點。而在[3]中提及的相關系統效能,則如表 1.1 所示,由於直接偵測雷射點 的關係,所以其準確度高,誤差範圍只在±3個像素點;當雷射筆是放置在固定 的平面上時,誤差更縮小至 1± 個像素點,且平均每秒約跳動一次。而相機與投 影平面間的距離、相機與投影機之間的角度、相機的解析度等,皆是影響準確度 的原因之一。
表 1.1 D. Laberge.[3]所提出的系統效能表。 在指向系統中,也有很多作法是利用手來當作指令或判斷朝向。A. A. Argyros et al.[4]所提出的系統中,先由影像中的色彩分佈(color distribution)來判斷出包 含膚色的部分,再利用貝式分類器(Bayesian classifier)來判斷出影像中手的座 標,最後求出指尖的位置。然後定義一些特殊的手勢動作(如手掌打開伸出五指, 代表按下滑鼠左鍵),藉以操控滑鼠,而此方法必須同時使用兩隻手。此系統亦 可使用兩台相機,根據 epipolar constraint 找到手在兩相機影像中的相對位置,再 重建出在空間中的位置。對於後者這種使用兩台相機,使用者只需使用一隻手即 可。 S. Sato et al.[5]所提出的系統,是利用手指尖與指根的連線方向,來當作朝向 。在系統中,先從影像中找出指尖,然後利用手指頭的樣板(template)來找出 指根的位置,有了指根與指尖的位置後,利用三維重建的方法去求出指向位置。 Y. P. Hung et al.[6]所提出的系統,則是考慮利用兩種方法來得到朝向,一種是利 用手指的些許像素點求其朝向,另一種則是利用指尖與眼睛的連線方向,來當作 指向的方向。而從此篇論文的描述中知道,用第一種方法作定位,很容易被雜訊 影響。而利用指尖與眼睛的連線方向的話,效果則較好,誤差約在一個像素點左 右。而由於利用 IIS(Institute of Information Science)head 這套立體視覺系統, 當指尖已經到達影像的邊界時,可以藉由回饋,更新相機參數,進而控制相機的 朝向,如此一來,在相機的視角範圍內,皆可得到正確的朝向。
而 E. Hosoyam et al.[7]所提出的系統則是家電操控應用的一例。在此篇論文
Parameter Result Range Line of sight
X accuracy ± screen pixels typical2
Y accuracy ±3screen pixels typical
Latency 52ms ±8msaverage
Update 60Hz ±1Hz(Overall)
Hz Hz 5
605 ± (Algo. only)
中,他們必須事先切割立體空間,將空間分割成好幾塊立方體,所有的家電設備 則位在這些立體空間中。在系統執行前,必須事先知道這些家電設備的位置。他 們先在影像中找出包含膚色的區域,然後辨別出臉部與手臂的位置,利用事先定 義好臉部重心與肩膀的距離,再根據已求得的臉部重心,即可算出肩膀的座標位 置。由於他們利用立體相機(stereo camera)的緣故,所以可以取得影像的深度 資訊,根據深度影像就能算出肩膀與手臂在三維空間中的座標位置。而肩膀與手 臂的連線方向,即定義為朝向。若在朝向上有家電設備的話,則可以根據遠端控 制器來控制該家電。而整體的系統反應時間,平均為 2.74 秒,標準差為 1.34 秒。 從以上我們介紹的論文中不難發現,[1][2][3]是直接偵測雷射點,當作指向 點,[4]是偵測手勢,來操控滑鼠;[5][6]則分別是以指尖與指尖和眼睛的連線方 向,定義指向,[7]則是以肩膀與手臂的連線方向來定義指向。在本篇論文中, 則是利用三維空間平面相交的觀念,先利用兩平面相交求指向方向,再與一目標 平面相交求指向點。所以,本論文所使用的方法與以上所介紹的論文有很大的差 異。
1.3 系統流程
有別於在前一節所提及的方法,本論文中的系統是參考[8][9]的作法,以立體 視覺為基礎,簡略系統流程圖如圖 1.1 所示,利用影像擷取卡擷取兩台攝影機連 續輸入的畫面,進行特定指向物的追蹤,並且正確地判斷出指向物所指的方向。 而後,再根據事先量測的空間座標資訊,以投影幾何轉換的方式,將指向物所指 的方向重建在三維空間座標上,再與目標平面交出指向點。最後將得到的指向點 指定給滑鼠游標,以此方法來判斷指向點是否準確。圖 1.1 簡略系統流程圖。
1.4 各章簡介
本論文總共分為六章,除了本章為緒論外,第二章為系統建置,將介紹本論 文所用的軟硬體設備與環境,並且說明本系統的細部運作流程。根據[8][9]的實 驗結果得知,指向物追蹤結果的好壞會影響系統的重建結果,故為了使重建結果 穩定,我們參考[9]的實驗結果,調整 HSI 數據。另外,從[8][9]得知,系統會有 一些誤差產生,故在第三章將詳細探討系統誤差來源,以及我們如何減少誤差。 第四章將介紹本系統在不考慮誤差來源的情況下,影像上的誤差與重建出指向點 的誤差間的關係。第五章則介紹四種不同方法來計算最後的指向點位置,並對靜 態指向與動態指向分別作探討,以及這四種不同方法的結果比較。最後則會為本 篇論文作個總結與本研究未來可應用的方向。第二章 系統建置
本論文研究之目的,是以立體視覺為基礎,來開發的一套即時指向系統。在 本章中,會先對於系統實施的工作環境,以及所使用的軟硬體配備規格與實驗器 材做簡單的介紹;然後再從影像擷取至最後的指向點重建,一一描述本系統內部 的運作流程。2.1 硬體環境
2.1.1 系統運作空間
圖 2.1 系統實驗實景。 本系統的工作環境分為兩部分,包含中控室和實驗場所。中控室中包含本系 統程式的電腦,圖 2.1 為我們的實驗場所外觀,包含有投影機、投影布幕,遠端 連接中控室電腦的筆記型電腦,以及兩台攝影機,一台在使用者站位的左後方, 另一台在使用者站位的右前方,視角大小可參考圖 2.2。由於是以立體視覺為基圖 2.2 兩台攝影機在不同視角所拍攝擷取的畫面。
2.1.2 軟硬體配備規格
在本系統中,我們所使用的硬體配備,包含兩台 PTZ 攝影機,分別設置在使 用者的左後與右前方,另外在中控室的電腦主機中,插有一張影像擷取卡,此擷 取卡支援四個視訊訊號輸入。系統是在 Windows XP 作業系統上開發,程式平台 為 Microsoft Visual Studio 2005,所使用的程式語言為 C#,相關規格整理於表 2.1。
表 2.1 實作系統所使用的硬體規格表。
項目 規格
PTZ 攝影機 D7720 高速球型攝影機
P/T/Z:360°/90°/16X
Electronic Shutter:1/60~1/30k sec Minimum Illumination:1 lux 影像擷取卡 ADLINK Angelo RTV 24 影像擷取卡 Format:NTSC Resolution:CIF(320×240) Frame rate:30fps 主機 PC CPU:Pentium4 3.2GHz RAM:2.0GB OS:Windows XP SP2
2.1.3 實驗器材
我們是利用一支套有特殊顏色紙張的雷射筆,當作我們的指向實驗器材,如 圖 2.3 所示,長度約 40 公分,寬度約為 2 公分。之所以會選用雷射筆來當作我 們的指向物,是因為雷射筆所射出的紅色點,可當作我們最後重建點的目標點, 也就是希望最後的重建點可以和雷射筆所射出的紅色點吻合。由於使用者是將雷 射筆整體握住,會妨害我們辨識雷射筆,所以我們將雷射筆套上具有特殊顏色的 紙張,以方便辨識,且能加快我們處理計算的速度。 圖 2.3 實驗中當作指向物的雷射筆。2.2 系統運作
在上節中,已介紹了在本篇論文中所用到的配備。在本節中,我們將完整的 介紹系統的運作流程。簡略流程如圖 1.1 所述,而底下就針對這三部分分別作探 討。2.2.1 影像擷取
在實驗場所中的兩台 PTZ 攝影機分別取得視訊訊號後,便將之傳送至影像擷 取卡的兩個連接埠(port)。從表 2.1 可知,影像擷取卡的畫格速率(frame rate) 為每秒 30 張,即 30fps,所以若系統只有執行影像擷取的部分,則每個連接埠每 秒約會傳送 30 張影像。圖 2.4 是當僅執行影像擷取程式時,於一秒鐘的時間之 內,兩連接埠與使用的影像畫格緩衝區(frame buffer)的紀錄檔。在圖 2.4 中我們觀察到,使用中的兩個連接埠,各自有兩塊影像畫格緩衝區(連接埠 0: 54165504/56066048,連接埠 1:57966592/59867136),而同一個連接埠,其影像 畫格緩衝區是會輪替使用的。但兩個連接埠並非一定是交替使用,有可能會發生 連續取同一個連接埠上的影像(如:編號 150/151,171/172)。從連接埠得到的 影像會放在其中一塊影像畫格緩衝區。在系統運作中我們是利用 callback 的方 式,意即當某一畫格緩衝區滿的時候,會產生中斷(interrupt),告知系統可取得 此畫格緩衝區的資料,也就是我們的影像,最後我們再利用影像擷取卡所提供的 函示庫,即可取得影像。 圖 2.4 是系統只有執行影像擷取的情況,但當執行所有系統程序時,如圖 2.5 所示,每秒每個連接埠平均約只有 10 張影像,雖然如此,其速度大致不會影響 整個系統的運作。 圖 2.4 僅僅執行影像擷取程式時,一秒鐘的時間,兩連接埠與使用的影像畫格緩衝區的紀 錄檔。其格式自左至右為編號、時間、連接埠編號、影像畫格緩衝區的記憶體位置。
圖 2.5 執行所有系統程序時,一秒鐘的時間,兩連接埠與使用的影像畫格緩衝區的紀錄檔。
2.2.2 指向物追蹤辨識
在上一小節中,我們所擷取到的影像是 RGB24 的彩色影像,而因為我們希
望不要受到光線太多的干擾,所以我們將之轉換至 HSI 色彩模型(color model),
將色調(hue)、飽和度(saturation)、亮度(intensity)三者分離。而因為我們是
利用特定顏色(紅色)的紙張來做辨識,所以我們可以事先量測該顏色在影像上 所呈現出來的 HSI 範圍,進而當作我們已知的條件來使用。由於實驗環境與[9] 相 同,故根據[9]得知,在不同的光源下,量測到 HSI 的範圍約分別為(340°~20°)、 (0.5~0.9)、以及(0.35~0.7)。而因為我們希望所有指向物在影像上的點皆能夠 盡量被保留,所以我們放寬條件限制,將色調的範圍設定在(300°~40°),飽和 度的範圍設在(0.2~1.0),亮度的範圍設定在(0.3~1.0)。 接著我們設一門檻值,將影像二值化,以圖 2.2 為例,二值化後的影像如 圖 2.6 所示。由於雷射筆在影像上的像素應該是不間斷的,所以先利用連接物體 標記(connected components labeling)的方式,將影像中所有不間斷的區塊分別
記錄下來。我們觀察指向物在形狀上有兩項特性,(1)筆直且非彎曲的物體、(2) 長寬度比例必須使整體呈現細長型。利用這兩項特性,將所有不間斷的區塊做篩 選,符合此兩項特性的區塊中,取體積最大者,即可選出包含有指向物的區塊。 圖 2.7 就是在這一連串步驟後,從圖 2.2 中找到包含有指向物的區塊。
圖 2.6 將圖 2.2 先轉至 HSI 色彩模型,再作二值化後的結果。
接著,我們利用主成份分析法(principal components analysis,簡稱 PCA)
[10],求出代表此區塊內所有資料點間關係的共變異數矩陣(covariance matrix), 再於特徵向量分解(eigenvector decomposition)後,選取特徵值(eigenvalue) 較大者所對應的特徵向量(eigenvector),作為指向物在影像上的朝向。因為此 朝向可以用直線方程式來表示,所以我們只需要記錄在朝向線上的兩點即可。其 作法是紀錄朝向線與區塊邊界的交點,如以圖 2.7 為例,即找出的朝向線與綠色 bounding box 的兩個交點,我們以{ILS,ILE}、{IRS,IRE}來分別表示左右兩影像的 兩交點。指向物追蹤辨識的流程圖,整理於圖 2.8。
(a) (b) 圖 2.7 從圖 2.6 找出指向物,並將之標示出來。 圖 2.8 指向物追蹤辨識流程圖。
2.2.3 指向點重建
至此我們得到指向物在二維影像中的位置,接著則需要將這二維座標轉換至 三維空間座標系中,我們利用的是投影幾何轉換(homography)的方法。首先我 們選取兩攝影機視角照得到的地面為參考平面(reference plane),且分別事先算 好各影像平面(image plane)上四點與參考平面對應四點的轉換關係,如圖 2.9 所示,如此我們就能夠計算出指向物投影在參考平面上的座標,並分別以 } , {R R 、{R ,R }表示在左右影像上,指向物的直線上兩點,投影在參考平 Input ImagesHSI Color Extraction
Thresholding to Binary Image
Connected Component Analysis
Laser Pen Recognition
Principal Component Analysis
面上的座標。然後分別各自再跟相機中心CL、CR交出兩平面π 、L π ,最後這R 兩平面再與投影布幕π 三平面共同交出一點,這點即代表我們的指向點,指向P 點重建步驟與更詳細的討論,可見第四章。 圖 2.9 影像平面與參考平面轉換示意圖。
2.3 總結
在本章中,介紹了我們系統所用的硬體配備,以及系統運作的初步流程。在 圖 2.10 中的紅色點即是雷射筆的指向點,在該指向點右下方者為計算所得的滑 鼠游標。在此種方法下,系統可以正常的運作,也使得我們有了指向系統的雛形。 圖 2.10 指向系統的投影布幕,可看得到指向點與滑鼠游標。第三章 系統誤差來源之探討
在本論文所提出的系統中,我們將系統所算出來的指向點指定給滑鼠游標位 置,藉此來判別指向點與雷射筆所射出的紅色點是否吻合。然而,在我們實驗之 後發現,滑鼠游標位置與紅色點並不吻合,這表示著本系統會產生誤差,此一誤 差包含了機械誤差與系統計算誤差。所以在本章中,我們將探討在本系統中所有 的誤差來源,以及我們對這些誤差將如何進行改善。但機械誤差並不在我們的研 究範圍內,所以在此我們並不作探討。3.1 座標量測造成的誤差
首先,當我們要將影像平面上的點,重建至三維空間上時,必須先將之投影 至參考平面(可參考 2.2.3 節的說明)。由於我們是利用平面投影轉換的方法,所 以必須知道實驗場景中的一些特徵點在世界座標系(world coordinate)及在影像 平面的座標,才有辦法事先算出影像平面與參考平面間的轉換關係。然而,因為 這些特徵點的世界座標數據,我們是以人為測量的方式得到的,所以勢必會有一 些誤差產生,而這些特徵點在影像上的座標,也是由人為所估計出來的,所以得 到的投影轉換矩陣(homography matrix),並非百分之百的準確。 當我們要作重建指向點時,是在三維空間中,三個平面求其交點,其中兩平 面π 、L π ,必須分別通過兩相機中心R CL、CR(可參考 2.2.3 節的說明),一般 相機中心都是利用傳統重建的方法,求出內外部參數來得到,但在此我們直接以 人為量測的方式估計,以省去作校正的麻煩,卻也因此而產生誤差。再者,將電 腦螢幕投影在布幕上,也需要知道投影布幕與電腦螢幕間的轉換關係,因此必須 量測投影布幕的世界座標位置。 我們知道,在現實生活中,只要透過人為量測,勢必會有誤差產生,故我們 透過多次的量測,希望盡量降低人為因素所造成的誤差。3.2 取像造成的誤差
從第二章所介紹的內容知道,因為在攝影機端接收到的訊號是類比訊號,而 我們從影像擷取卡上所得到的影像是數位訊號,由此可以知道訊號本身已經被做 過取樣(sampling),所以訊號本身已經有失真了,但這種誤差是無可避免的, 所以在此我們並不多作探討。 另外,在實驗場所的光源是一般的日光燈,雖然背景環境皆相同,但因為光 源的閃爍,且光源彼此閃爍的時間又並非同步,故在系統流程中,便會產生雜訊。 我們以其中一台攝影機為例,對實驗場景連續取得兩張影像,如圖 3.1 所示,It−1 與I ,將t I 與t It−1相減,得Idif = −It It−1,由於是靜態影像,且實驗場景固定,我 們預期Idif 會得到一張全黑的影像,但如圖 3.2 所示,其結果並不如我們所預期, 而會有相異的資料點的產生,亦即所謂的雜訊。經觀察發現,這些雜訊點並非週 期性的產生,其分佈點也不一致。 (a) (b) 圖 3.1 左相機所拍攝得到的連續兩張影像,(a)為It−1,(b)為It。圖 3.2 將圖 3.1 轉換至 HSI 色彩模型後,相減得到的結果,即Idif 。 除此之外,我們將圖 2.7(a)的雷射筆部分,放大來觀察,如圖 3.3 所示, 可以發現雷射筆的資料點,並非完全的正確,雖然我們將 HSI 限制條件放寬, 希望所有屬於雷射筆的資料點皆能被保留,但我們發現,如紅色線條圈起來的部 份,邊緣還是會有些破碎的情況,有些應該屬於雷射筆的資料點卻呈現黑色,如 藍色線條圈起來的部份所示。而也因為雜訊的影響,也會使得一些非雷射筆的資 料點,卻成為其資料點,這些的誤差皆會對接下來的流程產生影響。 圖 3.3 將圖 2.7 的雷射筆資料點放大。
3.3 利用 PCA 方法造成的誤差
在指向物的追蹤辨識中,我們是利用 PCA 的方法求其指向線,(參考 2.2.2節的說明),因為 PCA 的方法可以將所有給予的點,求出其位置之最大變異量方 向,而此方向即可定義出指向線的朝向。 由於我們找出雷射筆的資料點是利用連接物體標記的方式,所以只要雷射筆 的邊界點,其外圍有和雷射筆上下左右其一方向相鄰(4-neighbor)的雜訊點, 皆會被誤判成雷射筆的資料點。我們再以圖 3.3 為例,從圖中我們可以發現,在 兩箭頭所指處會有疑似非雷射筆的資料點發生,而在 PCA 計算時,這些與雷射 筆相鄰的雜訊點皆會被當成雷射筆的資料點作處理。 底下,我們以靜態影像作觀察。首先,我們固定雷射筆的位置,如果沒有任 何雜訊的影響,則雷射筆的朝向應當是不會改變的,意即我們得到的交點應該是 固定的。但經由實驗發現,交點會一直的改變。為了方便觀察,我們固定 {ILS,ILE}、{IRS,IRE}的x座標,來看 y 座標的範圍。我們作了多次的實驗發現, 如圖 3.4 所示,在此我們只列出其中兩次的結果,(a)(b)分別表示兩次的實驗, 圖中x軸為x座標, y 軸為 y 座標,我們以(a)為例,圖上看到的四群分別為 {ILS,ILE}、{IRS,IRE}的座標。從結果發現, y 座標的值並不會固定,不過其大小 會落在一個範圍內,我們將其中變動範圍最大者來放大來觀察,如圖 3.5 所示, 得到的 y 座標範圍約在 2 個像素(pixels)大小。 (a) (b) 圖 3.4 固定x座標,看y座標的範圍,(a)為實驗一,(b)為實驗二。
圖 3.5 將圖 3.4(b)中的其中一群資料放大。 我們再從時間與 y 座標變化的角度來觀察,圖 3.6 為圖 3.4 中, y 座標隨時間 變化的表示圖。圖中我們可以發現, y 座標是跳動不定的,而且其跳動是沒有週 期性的,是不規律的跳動。而原因主要是來自於光源不穩定,以及取樣裝置會有 雜訊產生的影響,所以在影像上雷射筆的像素點一直在改變,導致 PCA 算出來 的結果一直改變。 (a) (b) 圖 3.6 x座標為時間軸,看y座標的變化。(a)為實驗一,(b)為實驗二。
3.4 經由 Homography 計算造成的誤差
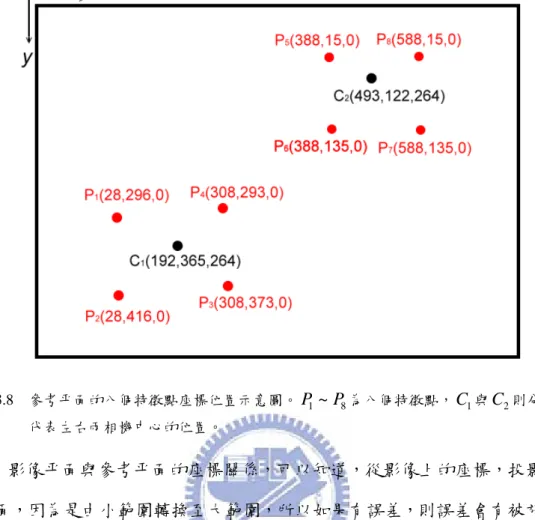
在整個系統當中,有兩個部份是利用平面投影轉換,分別為從影像平面轉換 至參考平面,和從指向平面(即布幕)轉換至螢幕,而底下將針對這兩次的轉換 所造成的誤差分別作探討。 如圖 3.7 所示,左右影像分別表示兩攝影機的視角,因為兩攝影機的視角無 法同時照到相同的參考平面,所以左右兩攝影機的參考平面是分開的。在圖上分 別以紅色點圈起來的四個標記點,即為我們用來作平面投影轉換的四個特徵點。 此四個特徵點我們在影像上是以手動方式去點選,而在地面上的座標我們則是以 量測的方式取得(可參考 3.1 節說明),參考平面的八個特徵點在世界座標系中 的座標位置示意圖如圖 3.8 所示,而C 與1 C 則分別代表左右兩相機中心的位置。2 以此方式,左右相機所得到的3 3× 平面投影矩陣HL、HR,分別為: -7 -5 -0.00231184 626042929 -0.00137555 370383911 -0.340319115902899 -0.00176139008075235 -0.00516421 929625191 0.94029008 261871 6.8813341479990 10 -1.07825415 75954 10 -0.000671808121441 L H ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ × × ⎥ ⎣ ⎦ -7 -6 -0.00178461532197717 0.00479595448795168 0.105894274445466 -0.00186676553362327 -0.00022812316168039 0.994362050347551 1.53311725714096 10 7.3934444947710 10 0.000890240732828 R H ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ × × ⎥ ⎣ ⎦ 圖 3.7 左右兩攝影機的視角影像,紅色圈起來的部份為特徵點。圖 3.8 參考平面的八個特徵點座標位置示意圖。P1~P8為八個特徵點,C1與C2則分別 代表左右兩相機中心的位置。 由影像平面與參考平面的座標關係,可以知道,從影像上的座標,投影至參 考平面,因為是由小範圍轉換至大範圍,所以如果有誤差,則誤差會有被放大的 效果。同樣的,當我們從指向平面要轉換至螢幕的座標時,也是利用平面投影轉 換。我們量測圖 3.9 中四個紅色標記點的座標位置,分別為(115,243)、(295,243)、 (295,108)與(115,108),然後求出此四點與螢幕角落四點的轉換關係。由於我 們將投影機所投射出來的螢幕平面四個角點分別設定為(0,0)、(640,0)、 (640,480)以及(480,0),所以我們將圖 3.9 中的P ~1 P ,分別與此四角點作對4 應,所得到的3 3× 平面投影矩陣為: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 790535711 0.00108958 0 0 061629 0.90404665 996122158 0.00373572 -0 2876532 0.42739964 -0 967435655 0.00374911 H ,
圖 3.9 指向平面(布幕)的座標示意圖。 轉換示意圖則如圖 3.10 所示,由圖上我們可以發現,長與寬分別從 180 轉成 640, 135 轉成 480,皆分別放大了32/9倍。而歸究其原因,主要是因為單位的不同, 在世界座標系當中,我們是以公分為單位,而在螢幕上則是以像素為單位,而由 小至大的轉換,只要有誤差,就會有被放大的效果。而經由平面投影轉換所造成 的誤差對系統所造成的影響,在下一章會有更深入的探討。 圖 3.10 指向平面與螢幕間的轉換示意圖。
3.5 總結
在本章中,我們說明了本系統所有可能的誤差來源。硬體設備所造成的誤差 是我們無法避免的。而在座標量測上,我們盡可能的避免人為上的疏忽,盡量使 得量測準確。而光源所產生的雜訊,以及 Homography 轉換所產生的計算誤差, 將在最後實驗章節時說明我們如何改善,降低誤差對我們系統的影響。
第四章 影像誤差與重建誤差之關係
從第二章的內容可以知道(參考 2.2.3 節),當我們求得指向物在影像上兩端 點的二維座標後,便利用投影幾何轉換(homography)的方法將二維座標轉換至 三維空間座標上。在此,我們再一次的簡略說明流程,以便於本章說明。 圖 4.1 由指向物至指向點之三維幾何示意圖。 圖 4.1 是重建指向物與其指向點的示意圖。當我們得到指向物在影像上兩端 點的座標後,經由平面投影轉換,可以得到圖 4.1 上的{RLS,RLE}、{RRS,RRE}此 四個座標點,{RLS,RLE}、C 交出平面L πL,{RRS,RRE}、C 交出平面R πR,πL、πR 與指向平面πP三平面交於一點 P ,此點 P 即是我們的重建點。由於我們將此點 設定給滑鼠游標,故必須再作一次平面投影轉換,將 P 轉換至螢幕座標上。 由第三章的探討可以知道,在影像端的種種誤差,會導致重建點的不正確。 所以在本章中,我們要探討在不考慮誤差來源時,影像上的誤差與重建點(滑鼠 座標)誤差之間的關係。我們會先對此流程中所使用的數學觀念作介紹,然後由 P π R C Right Camera L C Left Camera Rπ
Laser Pen L π Reconstructed Point不同的角度出發來作影像誤差與重建的探討,再由已知影像上的最大誤差求重建 誤差的上限,最後將探討在此種誤差分析之應用。
4.1 相關數學理論介紹
我們在不同平面間的轉換,是使用平面投影轉換的觀念,而在重建的部分, 則是利用三維幾何的觀念。所以在此節,我們則先對相關的數學理論,作簡單的 介紹,而詳細的數學理論與證明,可參考[11][12]。4.1.1 平面投影轉換
平面投影轉換的簡單定義為,有兩平面πA、πB,要將一群位在πA平面上的 點集合x ,透過透視投影對應到另一平面i πB上的點集合xi′。其間存在一個3 3× 的 投影轉換矩陣 H ,可將x 中的每個點轉換至i xi′ 中對應的點。如果以齊次座標表 示法表示,而x 與i xi′ 分別表示為xi =( , ,u v wi i i)T、 ' ' ( , , )T i i i i x′ = u v w′ ,則x 、i xi′ 與 H 間的關係為 4.1 式: ′ = i i x Hx λ (4.1) 其中λ是不為0的比例常數,H 則是可逆(non-singular)矩陣。4.1.1.1 齊次線性解
我們以外積的形式表示 4.1 式,則(4.1)可以寫成: xi'×Hxi =0, ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 9 8 7 6 5 4 3 2 1 h h h h h h h h h H (4.2) ′ i x 以齊次座標表示法來表示,且將 H 的第 j 列以hjT表示,再將 4.2 式外積展開, 則可以推導出 4.3 式:⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = × i T i i T i i T i i T i i T i i T i i i x h v x h u x h u x h w x h w x h v Hx x 1 2 3 1 2 3 ' ' ' ' ' ' ' (4.3) 因為hjTxi =xiThj,∀j∈N, 1≤ j≤3,藉由此關係式化簡後,4.3 式可以寫成以 H 列 向量為變數的式子,如 4.4 式: 0 0 ' ' ' 0 ' ' ' 0 3 2 1 = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − h h h x u x v x u x w x v x w T T i i T i i T i i T T i i T i i T i i T (4.4) 4.4 式雖然是由三個方程式構成,但只有前兩個方程式是線性獨立的(linear independent),所以只需要利用 4.4 式中,前兩個方程式即可,故(4.4)成為: 0 ' 0 ' ' ' 0 3 2 1 = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − h h h x u x w x v x w T i i T T i i T i i T i i T (4.5) 至此已經推導出以h為變數的方程式,接下來則要把 , 1hi ≤ ≤ 解出,即可解出i 9 H 。
4.1.1.2 求解平面投影轉換矩陣
投影轉換矩陣 H 有九個未知數,但因為其中一個為縮放係數(up to scale), 故其自由度為 8,也就是至少需要八條方程式才能解出 H 。而因為二維平面有x 和 y 座標,所以給予一組對應點,就可以得到兩條方程式,故需要四組對應點, 即能求出 H ,會完全符合這四組點的對應關係。而求解 H 的方法不只一種,我 們只介紹在本系統中的作法: (1) 每組x 與i x 中的對應點,可從 4.5 式中得到一個i′ 2×9的矩陣A 。 i (2) 因為有 4 組對應點,則可得到 4 個2×9的矩陣A ,將這些i A 結合成一個i 8×9 的矩陣 A 。角矩陣(diagonal matrix)、V 為 singular vector 所構成的正交矩陣(orthogonal
matrix)。我們所要求的H 是最小的 singular value 所對應的 singular vector,一
般而言,SVD 分解後的 D 會將 singular value 由大到小排列,意即V 中第 9 行 的九個元素:
[
]
T h h h h h h h h h1 2 3 4 5 6 7 8 9 ,為構成 H 的元素。 (4) hi, 1≤ ≤ 已計算出,則根據 4.2 式 H 的定義,即能求出 H 。 i 94.1.2 相關三維幾何運算介紹
在此節中,我們將針對系統中所使用的相關三維幾何運算作介紹,而我們會 用到的符號表示先整理如下: LS I :由左相機所得的指向線起始點,在影像平面上的座標點。 LE I :由左相機所得的指向線終點,在影像平面上的座標點。 RS I :由右相機所得的指向線起始點,在影像平面上的座標點。 RE I :由右相機所得的指向線終點,在影像平面上的座標點。 LS R :ILS,在三維參考平面上的投影點。 LE R :ILE,在三維參考平面上的投影點。 RS R :IRS,在三維參考平面上的投影點。 RE R :IRE,在三維參考平面上的投影點。 L C :左相機中心。 R C :右相機中心。 L π :由R 、LS RLE與CL三點所交出的平面。 R π :由R 、RS RRE與CR三點所交出的平面。 P π :指向平面。 P :由πL、πR與πP三平面所交出的點。4.1.2.1 三維空間中平面方程式表示法
平面方程式皆可以一般式ax+by+cz=d 來表示,其法向量為x、y、z項的係 數所組成,記成N =(a,b,c)。因為 N 與平面上的任意向量皆垂直,故可以用平面 上的兩向量的外積求得 N 。我們以左相機為例,先由R 與LS RLE求出RLSRLE,RLS 與CL求出RLSCL ,經由此兩向量外積可求得法向量 N ,算式為: ) ( ) , , (a b c RLS RLE RLSCL N = = α × (4.6) α 為比例常數,一般我們皆當作1來計算。接下來將R 或LS RLE帶入ax+by+cz=d 即可求出d。因為參考平面為z=0,若RLS =(xLS,yLS,0),則: LS LS 0 d =ax +by + ⋅ c (4.7) d求出後則平面πL即求出,π 亦由相同的方法求出。 R4.1.2.2 三維空間中三平面求交點
在三維空間中,給予任意三個平面,其三平面間的相互關係有以下幾種: (1) 三平面皆平行。 (2) 兩平面平行,第三平面與此兩平面各交於一條線。 (3) 三平面兩兩交於一直線,而這三直線不相交。 (4) 三平面交於一直線。 (5) 三平面交於一點。 而因為兩平面πL、π 和指向平面R π 在系統中的相對位置固定,必定不會平行,P 故我們可以確定在系統中只會發生上述(5)的情況。接下來我們只需要再用 Cramer’s rule 即可解出交點。 我們是利用三平面求交點,所以只要固定其中兩平面,就會交出一條線,而 重建點勢必會位在這條線上。由於π 是固定的,所以重建點的位置會由P π 與L πR 決定。又在本系統中CL與CR固定,所以,R 、LS RLE、R 與RS RRE此四點的位置,會決定重建點的位置。而R 、LS RLE、R 與RS RRE則分別是由ILS、ILE、IRS與IRE 作一次投影轉換所得,故接下來,我們要探討ILS、ILE、IRS與IRE變化時,對重 建點造成的影響。
4.2 由不同誤差半徑與不同角度做探討
以下我們所作一個實驗,是先將左右兩影像拍攝下來,而計算出ILS、ILE、 RS I 與IRE的座標位置約在(188,158)、(247,189)、(159,142)與(226,155),並 利用上述的方法求得重建座標為(497.235,363.03)。上述的這五個座標點,我們 則當作我們在 4.2 與 4.3 節中,探討的基準點。 在此節,我們要探討,當我們固定基準點,再改變ILS、ILE、IRS或IRE其中 一點之位置,讓此點座落於與基準點 1± 個像素點的位置範圍內,分別探討其對 重建點位置的影響。4.2.1 一維雜訊,垂直與水平方向之探討
首先,我們欲觀察雜訊分佈在垂直方向時,對重建出來的滑鼠座標位置有何 影響。我們固定ILE、IRS與IRE在基準點上,只改變ILS的座標,讓雜訊垂直分佈 在以基準點為中心, 1± 個像素點的範圍內,間隔為 0.2 個像素點上,如圖 4.2(a) 所示,重建出來的滑鼠座標位置則為圖 4.2(b)。圖中所標示的黑色「x」為以基 準點作重建得到的重建點。在圖 4.2(a)中,我們讓藍色點與紅色點成對稱分佈, 可以發現,重建出來的滑鼠座標位置亦呈現對稱分佈。且當ILS距離基準點越遠, 則得到的重建點離基準的滑鼠座標點也越遠,x座標的最大差距約為 12 個像素 點, y 座標的最大差距則約為 9 個像素點。這些重建點皆座落在一直線上,此直 線是由π 與R π 的交線所決定。 P(a) (b) 圖 4.2 改變ILS的座標,讓雜訊分佈在垂直方向。(a)為ILS的座標,(b)為重建的滑鼠 座標。 接著,我們將雜訊分佈在水平方向,觀察水平方向的雜訊對重建出來的滑鼠 座標位置有何影響。我們一樣固定ILE、IRS與IRE在基準點上,只改變ILS的座標, 讓雜訊水平分佈在以基準點為中心, 1± 個像素點的範圍內,間隔為 0.2 個像素 點上,如圖 4.3(a)所示,重建出來的滑鼠座標位置則為圖 4.3(b)。相同的, 在圖 4.3(a)中,我們讓藍色點與紅色點成對稱分佈,可以發現,重建出來的滑 鼠座標位置亦呈現對稱分佈。且在影像上的指向點距離基準點越遠,則得到的重 建點離基準的滑鼠座標點越遠,不過其誤差卻比在垂直方向的小,x與 y 座標皆 在 10 個像素點內, y 座標甚至在 5 個像素點左右。 我們改變I 、LS ILE、IRS或IRE其中一點,將雜訊分佈在垂直與水平方向上, 由多次的實驗發現,距離基準點越遠,則所得到重建點離基準的滑鼠座標點越 遠,但其誤差範圍卻不盡相同。從垂直與水平方向的實驗中,我們發現,在垂直 方向的雜訊對系統重建點的影響較大,也因此引發了我們探討,雜訊分佈在其他 的方向對系統重建點的分布與誤差有什麼影響。
(a) (b) 圖 4.3 改變ILS的座標,讓雜訊分佈在垂直方向。(a)為ILS的座標,(b)為重建的滑鼠 座標。
4.2.2 固定距離,由不同方向作探討
探討完在垂直及水平方向的影像點,對重建點的影響後,我們固定距離,來 探討相同距離但不同角度的影像點對重建點的影響。我們依舊只改變ILS,以利 我們作比較。我們在以基準點為圓心,半徑為 1 的圓上,每 30o角取樣一次,圖 4.4(a)為ILS的分佈圖,而重建點則為圖 4.4(b)所示。經觀察發現,當ILS的 點分佈在對稱於基準點的位置上時,其重建點也會對稱於基準點。而不同的角 度,其距離基準點的誤差也不同。由圖 4.4(b)可以發現,當ILS在30°角與210° 角時,所產生的誤差最小,x座標的誤差約為 0.5 個像素點, y 座標的誤差則約 為 0.4 個像素點。但在120°角與300°角時,則會產生最大誤差,x座標的誤差約 為 13 個像素點, y 座標的誤差則約為 10 個像素點。(a) (b) 圖 4.4 改變ILS的座標,觀察在不同角度上,對重建點的影響。(a)為ILS的座標,(b)為重 建的滑鼠座標。 接著我們固定I 、LS ILE與IRE,改變IRS,一樣以基準點為圓心,在半徑為 1 的圓上,每30o角取樣一次。圖 4.5(a)為IRS的分佈圖,而重建點則為圖 4.5 (b)所示。由圖 4.5(b)可以發現,其重建點分佈也是呈現對稱,當IRS在0° 角與180°角時,所產生的誤差最小,x座標約為 2 個像素點, y 座標則約為 1.5 個像素點。但在90°角與270°角時,則會產生最大誤差,x座標的誤差約為 10 個像素點, y 座標的誤差則約為 8 個像素點。在圖 4.4 中,因為固定IRS與IRE, 所以π 會被固定,故重建點會分佈在R π 與R π 的交線上;同理,在圖 4.5 中,P 則是固定ILS與ILE,所以π 會被固定,故重建點會分佈在L π 與L π 的交線上。 P
(a) (b) 圖 4.5 改變IRS的座標,觀察在不同角度上,對重建點的影響。(a)為IRS的座標,(b)為重 建的滑鼠座標。 經由不同角度的簡單模擬,我們發現在不同的角度上,所造成的誤差會不一 樣。而經由上述簡單的模擬,引發了我們探討,ILS、ILE、IRS與IRE的座標如何 分佈,會造成重建點的最大誤差。
4.3 在影像最大誤差的情況下求重建點的誤差上限
在 4.2 節的模擬皆是只改變ILS、ILE、IRS或IRE其中一點,不過因為無法預 期在影像上的雜訊,會導致ILS、ILE、IRS與IRE怎麼變化,但經由圖 3.5(參考 3.3 節)可知,雜訊在影像上造成約為 2 個像素點的誤差,所以可以將雜訊分別 分佈在以ILS、ILE、IRS與IRE為圓心,半徑為 1 的圓上作探討。由於我們並不知 道ILS、ILE、IRS與如何分佈,會造成重建點的最大誤差,所以我們一步步的作 逼近,來找出重建點的誤差上限。 首先,如圖 4.6 所示,我們將ILS、ILE、IRS與IRE,分別以基準點為圓心, 半徑為 1,在90°倍數角點上取樣,然後各取ILS、ILE、IRS與IRE一點,作 4 4 次 的組合,分別求出重建點,其重建點如圖 4.7 所示。我們再從這些重建點求出x座 標和 y 座標的最大與最小值,這就構成重建點的誤差上限。187 187.5 188 188.5 189 157 157.5 158 158.5 159 x coordina te (pix e l) y c o ordi n a te ( p ix e l) ILS 246 246.5 247 247.5 248 188 188.5 189 189.5 190 x coordina te (pix e l) y c o ordi n a te ( p ix e l) ILE 158 158.5 159 159.5 160 141 141.5 142 142.5 143 x coordina te (pix e l) y co o rd in a te ( p ix e l) IRS 225 225.5 226 226.5 227 154 154.5 155 155.5 156 x coordina te (pix e l) y c o or di na te ( p ix e l) IRE 圖 4.6 將ILS、ILE、IRS與IRE分別在90°倍數角取樣的分佈圖。 0 100 200 300 400 500 600 0 50 100 150 200 250 300 350 400 450 x coordina te (pix e l) y c o or di na te ( p ix e l)
Mouse Cursor Position
圖 4.8 則是求出的重建點誤差上限,(a)是將x座標和 y 座標範圍分別設定 在 0~640 與 0~480 之間,模擬在螢幕畫面滑鼠分佈的誤差範圍,(b)則是將重 建點誤差上限放大觀察。 (a) (b) 圖 4.8 ILS、ILE、IRS與IRE分別在90°倍數角取樣,重建點誤差上限圖。(a)x、y座標範 圍分別設定在 0~640 與 0~480 之間,(b)將重建點誤差上限放大觀察。 接著我們增加在圓上的取樣點,每15°角取樣一次,ILS、ILE、IRS與IRE取 樣分佈圖如圖 4.9 所示。我們以相同的方法計算重建點,得到的誤差上限為圖 4.10。與圖 4.8 比較,圖 4.10 所得到的誤差上限比較準確。我們觀察到,當我們 取樣的越密,則誤差上限越準確,而在此引起我們關注的是,I 、LS ILE、IRS與IRE 分別取樣在哪個點時,會構成圖 4.8(b)與圖 4.10(b)中的這些誤差上限點? 而經由我們多次的模擬,發現當ILSILE 、IRSIRE的斜率為最大與最小時,所得到 的重建點,會是構成誤差上限。
187 187.5 188 188.5 189 157 157.5 158 158.5 159 x coordina te (pixe l) y c o or dina te ( p ix e l) ILS 246 246.5 247 247.5 248 188 188.5 189 189.5 190 x coordinate (pix e l) y c o or dina te ( p ix e l) ILE 158 158.5 159 159.5 160 141 141.5 142 142.5 143 x coordina te (pixe l) y c o or dina te ( p ix e l) IRS 225 225.5 226 226.5 227 154 154.5 155 155.5 156 x coordinate (pix e l) y c o or dina te ( p ix e l) IRE 圖 4.9 將ILS、ILE、IRS與IRE分別在15°倍數角取樣的分佈圖。 (a) (b) 圖 4.10 ILS、ILE、IRS與IRE分別在15°倍數角取樣,重建點誤差上限圖。(a)x、y座標 範圍分別設定在 0~640 與 0~480 之間,(b)將重建點誤差上限放大觀察。 我們所模擬的四個圓,是以指向物在左右影像中所得到的端點為圓心,半徑 為 1 所構成的。故從相對位置來看,ILS與ILE所構成的兩圓的關係是外離、IRS與 RE I 所構成的兩圓的關係亦是外離。因為指向物夠長,兩端點在影像上的距離夠
遠,且兩圓的相對位置並非一上一下,故此兩圓的內公切線,分別是構成兩圓上 點連線的最大與最小斜率。所以我們可以直接以數學理論求得內公切線與兩圓的 切點,再由這些切點作重建,即可找出重建點的最大誤差。 我們延續上述的模擬,分別求出內公切線與切點,然後求得重建點的誤差上 限。圖 4.11 為所得到的切線與切點,而圖 4.12 則為由這些切點所求得重建點的 誤差上限。 (a) (b) 圖 4.11 ILS與ILE、IRS與IRE以數學理論求內公切線與切點,綠色與紅色點為切點,線則為 兩內公切線。(a)為ILS與ILE的模擬圖,(b)為IRS與IRE的模擬圖。 (a) (b) 圖 4.12 ILS、ILE、IRS與IRE以數學理論求內公切線與切點,重建點誤差上限圖。(a)將重 建點誤差上限放大觀察,(b)x、y座標範圍分別設定在 0~640 與 0~480 之間。
經由觀察可發現圖 4.11 中的{p,p’,r,r’}四點構成圖 4.12(b)中的 a 點, {q,q’,s,s’}、{p,p’,s,s’}與{q,q’,r,r’}則構成了 b、c 與 d 點。所以假若我們在左影像 中ILS與ILE分別固定於 p 與 p’,則所得到的重建點會落在圖 4.12(b)中 a 點與 c 點的連線上,同理若IRS與IRE分別固定於 s 與 s’,則所得到的重建點會落在圖 4.12(b)中 b 點與 c 點的連線上,其餘同理可得。 我們將以90°倍數角、15°倍數角取樣,以及以切點來重建的重建點誤差上 限畫在一起,如圖 4.13 所示。藍色線為90°倍數角所畫出的誤差上限,黑色線為 15°倍數角所畫出的誤差上限,而紅色線則為以切點畫出的誤差上限。可以發現 幾乎看不到黑色線,因為黑色線與紅色線幾乎重疊,也就表示以15°倍數角取樣 所得到的誤差上限與以內公切線所得到的誤差上限差距很小。 450 460 470 480 490 500 510 520 530 540 320 330 340 350 360 370 380 390 400 x coordinate (pixel) y co o rd in a te ( p ix el ) Draw Together 圖 4.13 比較重建點的誤差上限,將在 90 度倍數角上取樣、15 度倍數角上取樣,及以切點來求 重建點誤差上限畫在一起。
我們把以90°倍數角、15°倍數角取樣,以及以切點來重建的重建點誤差上限
數據整理如表 4.1。可以發現以切點求得的誤差上限為最大,但15°倍數角幾乎與
切點求得的誤差上限重合,誤差只在小數點下幾位。
表 4.1 以 90 度倍數角、15 度倍數角與切點所得的重建點誤差上限數據表。 (單位:像素)
xMax xMin yMax yMin
90 degree 535.9857 455.96 395.6483 330.5393 15 degree 539.2251 453.4022 397.8248 328.1907 內公切線 539.2422 453.2395 397.8823 328.1027 在我們的系統中,內公切線反應在指向物上,是使用者以指向物的一半長度 為中心,將指向物作最大角度旋轉。而外公切線反應在指向物上則為最大的平 移,故也因此引發我們探討,若ILS、ILE、IRS與IRE剛好座落在外公切線與圓的 切點上,則重建點會有多大的誤差範圍。所以我們分別求出外公切線與圓的切 點,然後求得重建點的誤差上限。圖 4.14 為所得到的切線與切點,而圖 4.15 則 為由這些切點所求得重建點的誤差上限。 (a) (b) 圖 4.14 ILS與ILE、IRS與IRE以數學理論求外公切線與切點,綠色與紅色點為切點,線則為 兩外公切線。(a)為ILS與ILE的模擬圖,(b)為IRS與IRE的模擬圖。
![表 1.1 D. Laberge.[3]所提出的系統效能表。 在指向系統中,也有很多作法是利用手來當作指令或判斷朝向。A. A. Argyros et al.[4]所提出的系統中,先由影像中的色彩分佈(color distribution)來判斷出包 含膚色的部分,再利用貝式分類器(Bayesian classifier)來判斷出影像中手的座 標,最後求出指尖的位置。然後定義一些特殊的手勢動作(如手掌打開伸出五指, 代表按下滑鼠左鍵) ,藉以操控滑鼠,而此方法必須同時使用兩隻手。此系統亦 可使用](https://thumb-ap.123doks.com/thumbv2/9libinfo/8392688.178775/15.892.229.665.140.372/在指向來判斷出含膚色的部分再利用貝式分類器出指尖五指代表按下.webp)
![圖 1.1 簡略系統流程圖。 1.4 各章簡介 本論文總共分為六章,除了本章為緒論外,第二章為系統建置,將介紹本論 文所用的軟硬體設備與環境,並且說明本系統的細部運作流程。根據[8][9]的實 驗結果得知,指向物追蹤結果的好壞會影響系統的重建結果,故為了使重建結果 穩定,我們參考[9]的實驗結果,調整 HSI 數據。另外,從[8][9]得知,系統會有 一些誤差產生,故在第三章將詳細探討系統誤差來源,以及我們如何減少誤差。 第四章將介紹本系統在不考慮誤差來源的情況下,影像上的誤差與重建出指向點 的誤](https://thumb-ap.123doks.com/thumbv2/9libinfo/8392688.178775/17.892.262.639.100.733/系統流本論文總共分文所用統會一些誤差產生故在三章系統在的誤.webp)