行政院國家科學委員會專題研究計畫 成果報告
需求分割之車輛路線問題啟發式解法研究
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 99-2221-E-009-089- 執 行 期 間 : 99 年 08 月 01 日至 100 年 07 月 31 日 執 行 單 位 : 國立交通大學運輸科技與管理學系(所) 計 畫 主 持 人 : 韓復華 計畫參與人員: 博士班研究生-兼任助理人員:朱佑旌 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 100 年 10 月 31 日
中文摘要: 分割配送之車輛路線問題(SDVRP)較傳統 VRP 問題可節省高達 50%之車輛及路線成本,是一重要研究課題。本研究針對 SDVRP 容許單一顧客需求被多條車輛路線配送之問題特性,新 設計三種啟發式解法,包括 SRC 起始解構建法,以及兩套路線 間區域搜尋法:2-opt**與 Ejection-chain*。本研究利用 SRC 產 生起始解,再以 2-opt**與 Ejection-chain*為基礎的變動鄰域尋 優(VND)機制進行求解。在未搭配巨集解法的情況下,57 題國 際標竿例題中即已突破 4 題文獻最佳解,另亦求得 3 題之現行 最佳解。顯示本研究所提出之啟發式方法日後若再適當搭配巨 集策略應用,必能在 SDVRP 求解上再創佳績。
英文摘要: Split delivery vehicle routing problem (SDVRP), which allows the demand of a customer to be split and delivered by multiple vehicles, is a variant of conventional vehicle routing problem (VRP). The potential savings due to the split delivery has been proved to be as much as 50%. In this paper, we propose three new heuristic methods tailor-made for SDVRP, i.e., SRC, 2-opt** and Ejection-chain*. The SRC is a route construction algorithm for generating an initial solution. The 2-opt** and Ejection-chain* are two innovative inter-route neighborhood search heuristics for solution improvement. Using a variable neighborhood descent solution framework, we have tested theses new heuristic methods on two sets of benchmark problems. It is found that our proposed approach has obtained four new best solutions, and three existing best solutions, for the 57 benchmark instances tested. Such results indicate a great potential of further applications of our proposed local search methods for
需求分割之車輛路線問題啟發式解法研究
1. 前言
本研究探討的主題為「分割配送之車輛路線問題」(split delivery vehicle routing problem, SDVRP),不同於傳統的 VRP,SDVRP 允許每個顧客的需求可分割由若干不同車輛路線予以 服務。SDVRP 由於放鬆 VRP 中「顧客需求不可分割」的條件,因此在其他條件相同下,SDVRP 必可求得較VRP 更小或至少相同成本的解答。文獻上最先探討 SDVRP 較 VRP 節省成本效益 的是由Dror 與 Trudeau[10]於1989 年提出。 [3]於2005 年證明 SDVRP 較 VRP 最多可以節省至 50%的距離成本。且 Archetti 等人[5]於2008 年證明允許分割配送時使用的車輛數目最多可以 節省一半。圖1 示意 SDVRP 的節省。假設各顧客需求為 10,車容量為 15。圖 1(a) 顯示 VRP 的求解結果,由於車容量限制使得每輛車只能服務一個顧客,因此完成所有服務需使用12 輛 車。然而,SDVRP 求解時允許需求可分割配送,因此僅需要 8 台車便能夠服務完所有需求。 圖1 SDVRP 節省之示意圖:(a) VRP 求解結果以及 (b) SDVRP 求解結果 (資料來源: Aleman 等人[1] ) SDVRP 容許需求的分割配送對消費者會造成不便,但對企業供應鏈或第三方物流公司的 內部物流,具有極大的節省成本之潛在效益。目前SDVRP 之研究尚不如傳統 VRP 成熟,且 若干新近方法局限在平面直線距離的問題求解,不易直接應用於實務上的路網距離問題。因 此,進一步研究SDVRP 求解方法,對實務之物流配送成本改善具有其重要之意義。
2. SDVRP 啟發式求解方法之回顧
Archetti 等人[2]於2005 年證明 SDVRP 為 VRP 的衍生問題,在複雜度上還是屬於 NP-hard 之問題,因此其求解之方法仍以啟發式法為主,關於精確解法的相關文獻則可參考 Aleman 等人[1]發表之文章。Dror 與 Trudeau[10]於1989 年首先提出 SDVRP 問題並以兩階段啟發式方 法求解。首先,作者以類似節省法的程序構建一個傳統的VRP 起始路線後,接以路線間 1-0、 1-1 及路線內 Or-opt 區域搜尋法進行改善。隨後,利用其針對需求分割特性所設計之「k-split 交換法」與「route addition」兩種改善機制加以改善求解,產生具分割配送特性的 SDVRP 解。 Archetti 等人[4]於 2006 年提出 SPILTABU 巨集啟發式方法求解 SDVRP。首先構建一個 TSP 的巨網 (giant tour),再依車容量分割成一個沒有分割配送的 VRP 起始解。產生起始解後,再 以k-split 交換法與 route addition 兩種區域搜尋機制[10]搭配禁制搜尋法的巨集指導原則反覆求解。最後將上一階段產生之最佳解續以GENIUS 分別對各條路線內進行改善以獲得最後的求 解結果。Boudia 等人[7]於2007 以瀰母演算法求解 SDVRP。該方法以基因演算法為基礎,反 覆搭配k-split 交換法[10]以及傳統的節線交換法強化求解深度,以及染色體族群密度的控制機 制加強求解廣度進行求解。作者測試了Archrtti 等人[4]提出之例題測試,求解結果突破許多當 時已知最佳解。Chen 等人[8]於2007 年提出 EMIP + VRTR 之混合啟發式演算法求解 SDVRP。 先使用節省法構建出VRP 起始解,再利用 EMIP 求解出最佳的端點 (endpoint) 顧客,在此階 段時便將需求分割的特性考慮到最佳化中以產生 SDVRP 解,最後以 VRTR 進行改善。作者 除了測試Archrtti 等人[4]提出之例題測試外,並提出21 題例題的新標竿題庫。 上述文獻除 Dror 與 Trudeau[10]具針對 SDVRP 特性所設計的啟發式方法外,其餘大都是 利用巨集啟發式策略提升求解的品質。而近年來開始有學者針對 split-delivery 的特性提出新 的解法,並且在求解的品質上有更近一步的突破。Ho 與 Haugland[12]於2004 年利用禁制搜尋 法求解具時窗限制的分割配送車輛路線問題 VRPTWSD,並考慮需求分割的特性提出四種改 良的區域搜尋法,分別命名為:relocate、exchange、 relocate split 以及 2-opt*。作者以 VRPTW
之國際標竿題庫進行測試求解VRPTWSD 以及 VRPTW 兩問題,求解結果在 VRPTW 突破了 5 題已知最佳解。Aleman 等人[1]於2010 提出一個具改善機制的路線構建方法 CA (construction algorithm) 搭配 VND 架構求解 SDVRP 問題,其 VND 中包含三個考慮需求分割特性的區域 搜尋法:shift、swap 以及 shift*。該文獻與標竿題庫比較,求解結果在 Chen 等人[8]
提出的21 題例題中突破了16 題當時最佳解。但其方法僅適用於歐幾里德距離的問題,在實際世界的問 題要運用便會遇到困難。Derigs 等人[9]於2010 提出一套區域搜尋基礎的巨集啟發式解法,將 三種原本使用於 VRP 的區域搜尋法加入分割配送的特性提出:2-OPT*、 EXCHANGE 以及 RELOCATE,並搭配模擬鍛鍊法、門檻接受法等等五種巨集啟發式方法求解 SDVRP。求解結 果在標竿題庫57 題中,突破了 51 題當時已知最佳解。
3. SRC + VND 之求解架構
由近幾年Aleman 等人[1]與Derigs 等人[9]之最新研究成果顯示,好的SDVRP 解法必須基 於具有針對需求分割特性設計的鄰域搜尋法。因此,本研究亦針對需求分割的特性,對SDVRP 設計出三種啟發式方法:(1) SRC 、 (2) 2-opt**以及 (3) Ejection-chain*,搭配傳統 2-opt 與 Or-opt 交換法,提出 SRC + VND 之求解架構。具體而言,整個求解架構可分為 SRC 起始解 構建模組與VND 變動鄰域尋優模組兩部分,如圖 2 所示。 在起始解構建方面,SRC 起始解構建模組之方法步驟如下: 步驟 1. 起始設定: 設 N 為所有顧客集合,編號 0 則代表場站;定義 N1、R1以及R2分別為未 完成服務之顧客集合、未滿載之路線集合以及以滿載之路線集合。設N1 =N、R1 =φ 以及R2 =φ。 步驟 2. 構建第一條路線:產生起始路線,尋找起始顧客 1,產生第一條起始路線 r1為0-1-0。 產生起始路線後,更新N1= N1\{1}以及 R1 = R1∪{r1}。在尋找起始顧客時,若起點為 「距場站最近之顧客」稱為SRC_n;若為「距場站最遠之顧客」則稱為 SRC_f。 步驟 3. 尋找種子點:以最省插入法(cheapest insertion),在 N1集合中尋找顧客點j,插入 R1 集合內的路線k;並且計算其插入成本 IC。開始 結束 SRC 起始解構建模組 Solution VND 變動鄰域尋優模組 2-opt Or-opt 2-opt** Ejection-chain* 圖2 SRC + VND 求解架構圖 步驟 4. 新增路線:考慮新增一條路線 0-j-0 以及其路線成本為 RC。如果 RC < IC,則新增 一條路線m (0-j-0);更新 R1 = R1∪{m},N1\{j}並且至步驟 7。否,則繼續。 步驟 5. 插入顧客:將顧客點 j 插入路線 k 中可行且成本最小的位置,並設定 N1\{j}。 步驟 6. 顧客點移除:檢查路線 k 是否超載;是,則先計算超載量 q,然後在路線 k 中尋找一 個顧客點p,p 為需求量大於等於 q 且與場站距離最接近者。將顧客點 p 於路線 k 中 移走需求量q,並更新 N1 = N1∪{p}。檢查路線 k 是否為滿載;是,則將路線 k 由 R1 集合移至R2;否,則繼續。 步驟 7. 停止法則:若N1 =φ, 則停止構建;最後的解則為R1 ∪R2。否,則回到步驟3。 SRC 起始解構建模組因包含 SRC_n 與 SRC_f 兩種不同的起始解,為具有「多重起點」機 制的起始解構建方法。 VND 區域搜尋模組中所使用的啟發式區域搜尋法除包含求解傳統 VRP 問題時常見的 2-opt 與 Or-opt 兩種路線內的區域改善法外,VND 改善模組的主要特色是本研究新設計的 2-opt**與 Ejection-chain*兩種路線間交換法,分述如下: 2-opt**區域搜尋法為傳統的 2-opt*區域搜尋法[13]的延伸。主要是應用於求解改善具時窗 限制的 VRP。Ho 與 Haugland[12]於 2004 年將 2-opt*延伸應用於求解 SDVRP。但因為 2-opt* 在設計的最初是用來改善具有時間窗限制的問題,因此在搜尋時是不考慮任何需要反轉路線 方向的鄰解 (由於反轉路線方向容易使得具時窗限制之問題產生不可行解)。不過,這樣的特 殊搜尋方式在無時窗的問題應用時是可以被放鬆的。
本研究提出的2-opt**區域搜尋法是屬於路線間的一種啟發式交換法,除考慮了原本 2-opt*搜
尋的鄰解外,也考慮需要反轉路線方向的鄰解。圖3 為 2-opt**區域搜尋法示意圖。圖 3(a)為 傳統2-opt*所考慮的交換改善方式,圖 3(b)則為 2-opt**額外考慮的交換改善方式,因此 2-opt** 會產生一個較傳統2-opt*更大的鄰域解空間。在利用 2-opt**區域搜尋法進行搜尋改善時,若 發生鄰解中單一條路內有兩個需求量來自於同一位顧客點。本研究將選擇節省成本較多的方 式進行兩需求量的合併。
R1 j i+1 i j+1 (b) (a) R2 R1 j i+1 i j+1 R2 R1 j i+1 i j+1 R2 圖3 2-opt**區域搜尋法示意圖
Ejection chain 的名詞源自於 Glover[11],最初應用於TSP 單一路線之交換改善。Rego[14] 將 其延伸至多條路線但不容許需求分割的VRP,並稱之為 node-ejection chain。本研究考慮需求 分割的特性,進一步提出Ejection-chain*的區域搜尋法。圖 4 為 Ejection-chain*區域搜尋法的 示意圖,圖4(a)表示將點 i 於 R1 移往 R2,移動結果如圖 4(b)。圖 4(b)則可能會發生兩種情況, 4(b)上圖表示此移動結束後為可行解,若此情況發生則停止;而 4(b)下圖表示此移動結束後, R2 發生超載,此時則需進行驅逐部分需求量以保持解的可行性。驅逐的移動以成本最小為原 則,可選擇部分移出或整點移出,如圖4(c)表示。 圖4 Ejection-chain*區域搜尋法示意圖 在Ejection-chain*區域搜尋法執行的過程中,因不同情況而有不同的插入方式。若插入路
線上已有其他需求量屬於同一個顧客則插入方式為將兩需求合併;反之,則選擇最節省成本 的位置插入。Ejection-chain*區域搜尋法能夠綜合考慮多個不同的移動方式而創造出較大的搜
尋鄰域範圍,其中會包括Aleman 等人[1]提出的shift (1-0 exch ange), swap (1-1 exchange), shift*
以及Ho 與 Haugland[12]提出的relocate split 等區域搜尋法。
VND 變動鄰域尋優模組內所使用的鄰域順序依序為:2-opt, Or-opt, 2-opt** 最後為
Ejection-chain*。最後以兩種不同起始解改善後較佳的答案做為最後的求解結果。
4. 求解結果與分析
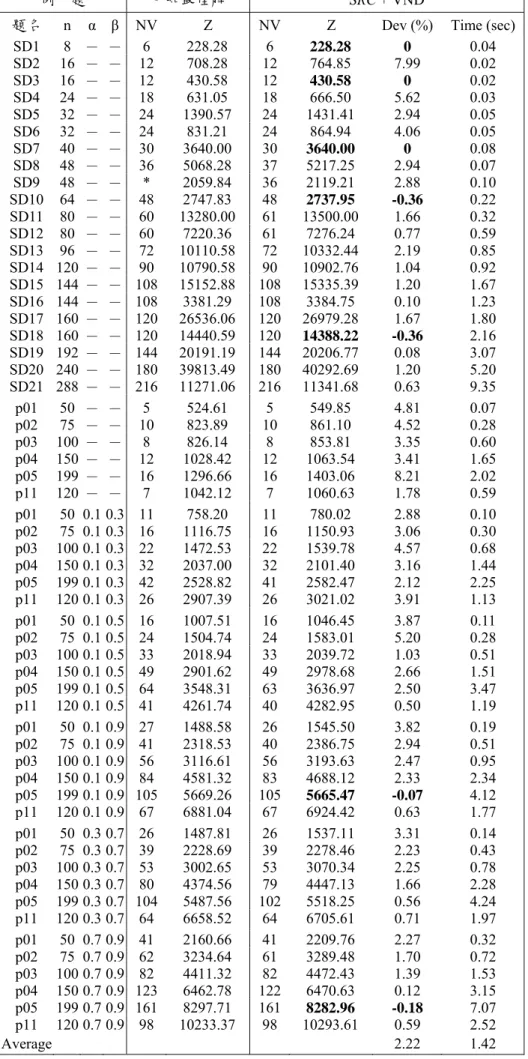
本研究是以C#程式語言進行演算法撰寫,執行環境的 OS 為 Windows XP,CPU 為 3.01 GHz AMD 以及 3.25 GB 的 RAM。並以兩組國際標竿題庫,共 57 題例題作為測試所提出之 SDVRP 啟發式方法的求解效果。第一個題庫是由 Chen 等人[8]所提出之21 題測試例題。該題 庫中顧客數範圍為8-288 個,所有車容量限制皆為 100。第二個題庫是由 Derigs 等人[9]於2010 年所測試之36 題 Archetti 等人[6]的題庫。該題庫中顧客數為50-120,車容量為 140-200。搭 配6 組不同的需求擾動上下限參數 α 及 β 值,可將 36 題例題分為 6 組子題庫。需求擾動的公 式為[αQ, βQ],Q 為該例題對應之車容量。 本研究提出之SRC + VND 含有簡單的「多重起點」概念。在起始解構建模組分別以 SRC_n 與SRC_f 產生兩組不同的起始解後,以 VND 進行改善。SRC_n + VND 與 SRC_f + VND 這兩 種不同的起始解求解結果的比較,就57 個測試例題的整體平均誤差而言,分別為 3.02%與 2.77%,並無太大的差異。但再以個別例題為基準進行比較,則可發現兩種不同起始解在 57 題例題中卻有11 題的兩種結果差距大於 1%。顯示 SRC_n + VND 與 SRC_f + VND 有相當程 度的互補效果。在運算時間方面,兩種構建方式也極為快速,平均單題的運算時間分別為0.7 秒與0.73 秒。有關 SRC_n 與 SRC_f 兩個不同的起始解加上 VND 求解 57 題標竿題例的完整 結果請參考附錄A。 鑒於本研究提出演算法的高效率與兩種起始解的互補效果,本研究以SRC_n + VND 與 SRC_f + VND 兩者中較佳的答案做為 SRC + VND 的最後結果,運算時間的計算則為兩種不同 起點求解運算的時間總和,其結果詳見表1。表 1 中 57 題例題的前 21 題 (SD1 - SD21) 為 Chen 等人[8]之標竿題庫,其餘36 題為 Archetti 等人[6]的題庫例題。例題部分,n 為顧客點數。 結果部分,Z 為求解結果,Dev 則為 Z 與文獻已知最佳解的誤差率,粗體字表示突破以及求 得文獻最佳解的結果,Time (sec) 為求解運算時間。由表 1 得知,在 Chen 等人[8]題庫中,SRC+ VND 在例題 SD10 與 SD18 求得突破目前已知最佳解的結果,並於例題 SD1、SD3 與 SD7 求得平最佳解的結果。Derigs 等人[9]所測試之36 題例題中,SRC + VND 在 p05 (α = 0.1, β = 0.9) 以及 p05 (α = 0.7, β = 0.9) 兩題求得突破目前已知最佳解的結果。SRC + VND 求解兩組題庫 的平均誤差分別為1.73%與 2.51%,而 57 題的整體平均誤差為 2.22%。57 題標竿題庫的平均 單題運算時間為1.42 秒,且各題皆能夠在 9.35 秒內求得答案。 由表1 可以發現到兩個現象。首先,SRC + VND 求解顧客越多的問題效果越好,特別是 顧客點數大於100 的例題。例如,SD14 到 SD21 題與已知最佳解的誤差僅僅只有 0.7%。而在 小於50 點的例題,例如 SD1 到 SD9 題的平均誤差為 2.94%。除此之外,由表 1 中亦可觀察 到SRC + VND 求解顧客需求量越大的問題效果越好。例如 Derigs 等人[9]所測試之36 題例題 中,除了第一個子題庫外,另外的五個子題庫的顧客需求量受到參數(α, β)的影響,呈現遞增 的趨勢。在平均誤差表現上五組子題庫隨著需求的增加呈現遞減的趨勢,依序為3.28%、 2.62%、2.02%、1.79%以及 0.98%。
表1. 本研究求解結果與標竿題庫比較表 例 題 已知最佳解 SRC + VND
題名 n α β NV Z NV Z Dev (%) Time (sec) SD1 8 - - 6 228.28 6 228.28 0 0.04 SD2 16 - - 12 708.28 12 764.85 7.99 0.02 SD3 16 - - 12 430.58 12 430.58 0 0.02 SD4 24 - - 18 631.05 18 666.50 5.62 0.03 SD5 32 - - 24 1390.57 24 1431.41 2.94 0.05 SD6 32 - - 24 831.21 24 864.94 4.06 0.05 SD7 40 - - 30 3640.00 30 3640.00 0 0.08 SD8 48 - - 36 5068.28 37 5217.25 2.94 0.07 SD9 48 - - * 2059.84 36 2119.21 2.88 0.10 SD10 64 - - 48 2747.83 48 2737.95 -0.36 0.22 SD11 80 - - 60 13280.00 61 13500.00 1.66 0.32 SD12 80 - - 60 7220.36 61 7276.24 0.77 0.59 SD13 96 - - 72 10110.58 72 10332.44 2.19 0.85 SD14 120 - - 90 10790.58 90 10902.76 1.04 0.92 SD15 144 - - 108 15152.88 108 15335.39 1.20 1.67 SD16 144 - - 108 3381.29 108 3384.75 0.10 1.23 SD17 160 - - 120 26536.06 120 26979.28 1.67 1.80 SD18 160 - - 120 14440.59 120 14388.22 -0.36 2.16 SD19 192 - - 144 20191.19 144 20206.77 0.08 3.07 SD20 240 - - 180 39813.49 180 40292.69 1.20 5.20 SD21 288 - - 216 11271.06 216 11341.68 0.63 9.35 p01 50 - - 5 524.61 5 549.85 4.81 0.07 p02 75 - - 10 823.89 10 861.10 4.52 0.28 p03 100 - - 8 826.14 8 853.81 3.35 0.60 p04 150 - - 12 1028.42 12 1063.54 3.41 1.65 p05 199 - - 16 1296.66 16 1403.06 8.21 2.02 p11 120 - - 7 1042.12 7 1060.63 1.78 0.59 p01 50 0.1 0.3 11 758.20 11 780.02 2.88 0.10 p02 75 0.1 0.3 16 1116.75 16 1150.93 3.06 0.30 p03 100 0.1 0.3 22 1472.53 22 1539.78 4.57 0.68 p04 150 0.1 0.3 32 2037.00 32 2101.40 3.16 1.44 p05 199 0.1 0.3 42 2528.82 41 2582.47 2.12 2.25 p11 120 0.1 0.3 26 2907.39 26 3021.02 3.91 1.13 p01 50 0.1 0.5 16 1007.51 16 1046.45 3.87 0.11 p02 75 0.1 0.5 24 1504.74 24 1583.01 5.20 0.28 p03 100 0.1 0.5 33 2018.94 33 2039.72 1.03 0.51 p04 150 0.1 0.5 49 2901.62 49 2978.68 2.66 1.51 p05 199 0.1 0.5 64 3548.31 63 3636.97 2.50 3.47 p11 120 0.1 0.5 41 4261.74 40 4282.95 0.50 1.19 p01 50 0.1 0.9 27 1488.58 26 1545.50 3.82 0.19 p02 75 0.1 0.9 41 2318.53 40 2386.75 2.94 0.51 p03 100 0.1 0.9 56 3116.61 56 3193.63 2.47 0.95 p04 150 0.1 0.9 84 4581.32 83 4688.12 2.33 2.34 p05 199 0.1 0.9 105 5669.26 105 5665.47 -0.07 4.12 p11 120 0.1 0.9 67 6881.04 67 6924.42 0.63 1.77 p01 50 0.3 0.7 26 1487.81 26 1537.11 3.31 0.14 p02 75 0.3 0.7 39 2228.69 39 2278.46 2.23 0.43 p03 100 0.3 0.7 53 3002.65 53 3070.34 2.25 0.78 p04 150 0.3 0.7 80 4374.56 79 4447.13 1.66 2.28 p05 199 0.3 0.7 104 5487.56 102 5518.25 0.56 4.24 p11 120 0.3 0.7 64 6658.52 64 6705.61 0.71 1.97 p01 50 0.7 0.9 41 2160.66 41 2209.76 2.27 0.32 p02 75 0.7 0.9 62 3234.64 61 3289.48 1.70 0.72 p03 100 0.7 0.9 82 4411.32 82 4472.43 1.39 1.53 p04 150 0.7 0.9 123 6462.78 122 6470.63 0.12 3.15 p05 199 0.7 0.9 161 8297.71 161 8282.96 -0.18 7.07 p11 120 0.7 0.9 98 10233.37 98 10293.61 0.59 2.52 Average 2.22 1.42
5. 結論與建議
SDVRP 是考慮容許需求分割的車輛路線問題,本研究提出三種針對需求分割特性設計的 啟發式演算法,其中包含了SRC 起始路線構建法、2-opt**區域搜尋法與 Ejection-chain*區域 搜尋法。SRC 起始路線構建法是一套以區域搜尋為基礎,利用插入以及新增路線的方式進行 構建的啟發式方法。不論是直線或是格子路網都能夠運用SRC 來構建一個可行的起始路線。 2-opt**延伸了 2-opt*的概念,額外考慮路線反轉的鄰域,使得搜尋時能夠考慮更大的範圍。 Ejection-chain*則考慮同一時間多點移動的連續交換方式,其中的移動包括了 Aleman 等人[1]提出的shift、swap 以及 shift*區域搜尋法,和 Ho 與 Haugland[12]提出的relocate split。
本研究利用SRC 產生一個可行的起始解後,運用 VND 加以改善求解。在 57 題標竿題庫
中共突破4 題文獻最佳解,另亦求得 3 題現有已知最佳解。平均單一題求解的時間僅需要 1.42 秒的CPU 時間。由此可知,在未來 SDVRP 求解方法若能運用本研究提出的啟發式方法搭配 其他巨集啟發式策略,是極具潛力再創更佳的成果。
參考文獻
1. Aleman, R.E., X. Zhang and R.R. Hill (2010), “An adaptive memory algorithm for the split delivery vehicle routing problem,” Journal of Heuristics, Vol. 16, No. 3, pp. 441-473.
2. Archetti, C., R. Mansini and M.G. Speranza (2005), “Complexity and reducibility of the skip delivery problem,” Transportation Science, Vol. 39, No. 2, pp. 182-187.
3. Archetti, C., M.W.P. Savelsbergh and M.G. Speranza (2006), “Worst-case analysis for split delivery vehicle routing problems,” Transportation Science, Vol. 40, No. 2, pp. 226–234. 4. Archetti, C., A. Hertz and M.G. Speranza (2006), “A tabu search algorithm for the split
delivery vehicle routing problem,” Transportation Science, Vol. 40, No. 1, pp. 64–73.
5. Archetti, C., M.W.P. Savelsbergh and M.G. Speranza (2008), “To split or not to split: That is the question,” Transportation Research Part E, Vol. 44, No. 1, pp. 114-123.
6. Archetti, C., M.G. Speranza and M.W.P. Savelsbergh (2008), “An optimization-based heuristic for the split delivery vehicle routing problem,” Transportation Science, Vol. 42, No. 1, pp. 22-31.
7. Boudia, M., C. Prins and M. Reghioui (2007), “An effective memetic algorithm with population management for the split delivery vehicle routing problem,” in Bartz-Beielstein, T., M.J.B. Aguilera, C. Blum, B. Naujoks, A. Roli, G Rudolph. and Sampels (Eds.) M., HM,
LNCS, Vol. 4771, Springer, Berlin, pp. 16–30.
8. Chen, S., B. Golden and E. Wasil (2007), “The split delivery vehicle routing problem: Applications, algorithms, test problems, and computational results,” Networks, Vol. 49, No. 4, 318–329.
9. Derigs, U., B. Li and U. Vogel (2010), “Local search-based metaheuristics for the split delivery vehicle routing problem,” Journal of the Operational Research Society, Vol. 61, No. 9, pp. 1356-1364.
10. Dror, M. and P. Trudeau (1989), “Savings by split delivery routing,” Transportation Science, Vol. 23, No. 2, pp. 141–145.
11. Glover, F. (1992), “Ejection chains, reference structures and alternating path methods for traveling salesman problems,” Discrete Applied Mathematics y, Vol. 65, No. 1-3, pp. 223–253. 12. Ho, S. and D. Haugland (2004), “A tabu search heuristic for the vehicle routing problem with
time windows and split deliveries,” Computer and Operational Research, Vol. 31, No. 12, pp. 1947–1964.
13. Potvin, J.Y. and J.M. Rousseau (1995), “An exchange heuristic for routeing problems with time windows,” Journal of the Operational Research Society, Vol. 46, No. 12, pp. 1433−1446. 14. Rego, C. (2001), “Node-ejection chains for the vehicle routing problem: Sequential and
parallel algorithms. Parallel Computing, Vol. 27, No. 3, pp. 201-222.
附錄: 兩種不同的起始解求解結果與比較
SRC_n + VND 與 SRC_f + VND 這兩種不同的起始解求解結果的比較,彙整如下頁之附表
A。附表中 57 題例題的前 21 題 (SD1 - SD21) 為 Chen 等人[8]之標竿題庫,其餘36 題為 Archetti 等人[6]的題庫例題。例題部分,n 為顧客點數。結果部分,Z 為求解結果,Dev 則為 Z 與文獻 已知最佳解的誤差率,粗體字表示突破以及求得文獻最佳解的結果,Time (sec) 為求解運算 時間。
附表A. 兩種起始解求解結果與比較
例 題 已知最佳解 SRC_n + VND SRC_f + VND
題名 n α β NV Z NV Z Dev (%) Time (sec) NV Z Dev (%) Time (sec) SD1 8 - - 6 228.28 6 256.57 12.39 0.03 6 228.28 0.00 0.01 SD2 16 - - 12 708.28 12 764.85 7.99 0.01 12 765.76 8.12 0.01 SD3 16 - - 12 430.58 12 477.13 10.81 0.01 12 430.58 0.00 0.01 SD4 24 - - 18 631.05 18 673.87 6.79 0.01 18 666.50 5.62 0.02 SD5 32 - - 24 1390.57 24 1431.41 2.94 0.03 24 1468.31 5.59 0.02 SD6 32 - - 24 831.21 24 867.96 4.42 0.02 24 864.94 4.06 0.03 SD7 40 - - 30 3640.00 30 3640.00 0.00 0.04 30 3660.00 0.55 0.05 SD8 48 - - 36 5068.28 37 5217.25 2.94 0.04 37 5237.39 3.34 0.03 SD9 48 - - * 2059.84 36 2119.21 2.88 0.06 36 2120.51 2.95 0.04 SD10 64 - - 48 2747.83 48 2739.60 -0.30 0.11 48 2737.95 -0.36 0.11 SD11 80 - - 60 13280.00 61 13500.00 1.66 0.15 61 13650.29 2.79 0.16 SD12 80 - - 60 7220.36 61 7276.24 0.77 0.29 61 7276.24 0.77 0.29 SD13 96 - - 72 10110.58 72 10332.44 2.19 0.43 72 10332.44 2.19 0.43 SD14 120 - - 90 10790.58 90 10959.77 1.57 0.44 90 10902.76 1.04 0.49 SD15 144 - - 108 15152.88 108 15350.20 1.30 0.81 108 15335.39 1.20 0.86 SD16 144 - - 108 3381.29 108 3384.75 0.10 0.61 108 3409.89 0.85 0.62 SD17 160 - - 120 26536.06 120 27068.38 2.01 0.87 120 26979.28 1.67 0.93 SD18 160 - - 120 14440.59 120 14403.46 -0.26 0.98 120 14388.22 -0.36 1.19 SD19 192 - - 144 20191.19 144 20420.18 1.13 1.47 144 20206.77 0.08 1.60 SD20 240 - - 180 39813.49 180 40366.84 1.39 2.11 180 40292.69 1.20 3.10 SD21 288 - - 216 11271.06 216 11345.79 0.66 4.73 216 11341.68 0.63 4.62 p01 50 - - 5 524.61 5 571.11 8.86 0.04 5 549.85 4.81 0.03 p02 75 - - 10 823.89 10 861.10 4.52 0.13 10 869.94 5.59 0.16 p03 100 - - 8 826.14 8 860.26 4.13 0.28 8 853.81 3.35 0.32 p04 150 - - 12 1028.42 12 1063.54 3.41 0.72 12 1088.46 5.84 0.93 p05 199 - - 16 1296.66 16 1420.82 9.57 1.14 16 1403.06 8.21 0.88 p11 120 - - 7 1042.12 7 1060.63 1.78 0.25 7 1203.54 15.49 0.34 p01 50 0.1 0.3 11 758.20 11 780.02 2.88 0.05 11 783.84 3.38 0.06 p02 75 0.1 0.3 16 1116.75 16 1188.09 6.39 0.09 16 1150.93 3.06 0.22 p03 100 0.1 0.3 22 1472.53 22 1539.78 4.57 0.32 22 1544.19 4.87 0.36 p04 150 0.1 0.3 32 2037.00 32 2104.66 3.32 0.80 32 2101.40 3.16 0.64 p05 199 0.1 0.3 42 2528.82 41 2649.40 4.77 0.97 41 2582.47 2.12 1.28 p11 120 0.1 0.3 26 2907.39 26 3021.02 3.91 0.45 26 3076.00 5.80 0.69 p01 50 0.1 0.5 16 1007.51 16 1051.43 4.36 0.05 16 1046.45 3.87 0.06 p02 75 0.1 0.5 24 1504.74 24 1583.01 5.20 0.15 24 1584.68 5.31 0.13 p03 100 0.1 0.5 33 2018.94 33 2039.72 1.03 0.27 33 2056.63 1.87 0.24 p04 150 0.1 0.5 49 2901.62 49 3005.84 3.59 0.50 49 2978.68 2.66 1.01 p05 199 0.1 0.5 64 3548.31 63 3640.44 2.60 1.66 63 3636.97 2.50 1.81 p11 120 0.1 0.5 41 4261.74 40 4316.38 1.28 0.46 40 4282.95 0.50 0.72 p01 50 0.1 0.9 27 1488.58 26 1560.57 4.84 0.10 26 1545.50 3.82 0.10 p02 75 0.1 0.9 41 2318.53 40 2386.75 2.94 0.22 40 2441.77 5.32 0.28 p03 100 0.1 0.9 56 3116.61 56 3198.32 2.62 0.51 56 3193.63 2.47 0.45 p04 150 0.1 0.9 84 4581.32 83 4692.92 2.44 1.14 83 4688.12 2.33 1.20 p05 199 0.1 0.9 105 5669.26 105 5665.47 -0.07 2.40 105 5668.73 -0.01 1.72 p11 120 0.1 0.9 67 6881.04 67 6924.42 0.63 0.91 67 6931.15 0.73 0.87 p01 50 0.3 0.7 26 1487.81 26 1537.11 3.31 0.09 26 1540.29 3.53 0.06 p02 75 0.3 0.7 39 2228.69 39 2307.96 3.56 0.20 39 2278.46 2.23 0.22 p03 100 0.3 0.7 53 3002.65 53 3070.34 2.25 0.38 53 3079.97 2.58 0.41 p04 150 0.3 0.7 80 4374.56 79 4447.13 1.66 1.15 79 4462.19 2.00 1.12 p05 199 0.3 0.7 104 5487.56 102 5518.25 0.56 2.51 102 5526.76 0.71 1.73 p11 120 0.3 0.7 64 6658.52 64 6705.61 0.71 0.98 64 6765.66 1.61 0.99 p01 50 0.7 0.9 41 2160.66 41 2209.76 2.27 0.16 41 2214.48 2.49 0.15 p02 75 0.7 0.9 62 3234.64 61 3289.48 1.70 0.32 61 3289.56 1.70 0.40 p03 100 0.7 0.9 82 4411.32 82 4499.79 2.01 0.59 82 4472.43 1.39 0.93 p04 150 0.7 0.9 123 6462.78 122 6483.92 0.26 1.65 122 6470.63 0.05 1.51 p05 199 0.7 0.9 161 8297.71 161 8303.25 0.07 3.77 161 8282.96 -0.18 3.29 p11 120 0.7 0.9 98 10233.37 98 10308.79 0.74 1.12 98 10293.61 0.59 1.39 Average 3.02 0.70 2.77 0.73
國科會補助計畫衍生研發成果推廣資料表
日期:2011/10/31國科會補助計畫
計畫名稱: 需求分割之車輛路線問題啟發式解法研究 計畫主持人: 韓復華 計畫編號: 99-2221-E-009-089- 學門領域: 交通運輸無研發成果推廣資料
99 年度專題研究計畫研究成果彙整表
計畫主持人:韓復華 計畫編號:99-2221-E-009-089-計畫名稱:需求分割之車輛路線問題啟發式解法研究 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 0 0 100% 篇 論文著作 專書 0 0 100% 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 2 2 100% 博士生 1 1 100% 博士後研究員 0 0 100% 國內 參與計畫人力 (本國籍) 專任助理 0 0 100% 人次 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 1 1 100% 篇 16th HKSTS International Conference 論文著作 專書 0 0 100% 章/本 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 0 0 100% 博士生 0 0 100% 博士後研究員 0 0 100% 國外 參與計畫人力 (外國籍) 專任助理 0 0 100% 人次其他成果