一種以周向傳遞之脊緣波致動的超音波馬達
101
0
0
全文
(2) ㄧ種以周向傳遞之脊缘波致動的超音波馬達 A Rotary Ultrasonic Motor Actuated by Circumferentially Traveling Ridge Waves 研 究 生:鍾重光. Student:Chung-Kuang Chung. 指導教授:尹慶中 博士. Advisor:Dr. Ching-Chung Yin. 國 立 交 通 大 學 機械工程學系碩士班 碩 士 論 文. A Thesis Submitted to Department of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering July 2009 Hsinchu, Taiwan, Republic of China. 中華民國九十八年七月.
(3) ㄧ種以周向傳遞之脊缘波致動的超音波馬達. 研究生:鍾重光. 指導教授:尹慶中 博士. 國立交通大學機械工程學系碩士班. 摘. 要. 本研究研發一種以周向脊緣波驅動的超音波馬達,碟型定子的外側圓 周上設一脊緣,強化定子的扭轉剛性。以雙相交流電激發定子底部的壓電 圓環,產生兩組振幅相同、相位差 90 度的撓曲駐波。兩者經建設性干涉 成行進波,沿著定子外側脊緣作周向傳遞,藉摩擦力驅動轉子。依兩組駐 波的相位領先或落後,改變馬達的轉動方向。 碟型定子的外側脊緣設有 30 度斜角齒梳,放大行進波的振幅。以定 子的外徑、厚度及脊緣高度為設計參數,採用有限元素法進行數值模擬, 依據模態隔離的程度,選擇撓曲模態 F(1,3)作為定子的激振模態。另以定 子表面粒子的橢圓運動軌跡比值為目標函數,決定定子的最佳幾何尺寸。 本研究實驗量測超音波馬達原型機的性能曲線。表面鍍一層鐵氟龍耐磨材 料之不鏽鋼轉子的最大轉速達 101.6 rpm,最大扭矩為 8.16 mN-m,具有高 扭矩、低轉速、輸出穩定及靜音的特性。. 關鍵字:超音波馬達、周向脊緣波、模態隔離、橢圓軌跡比值. i.
(4) A Rotary Ultrasonic Motor Actuated by Circumferentially Traveling Ridge Waves Student: Chung-Kuang Chung. Advisor: Dr. Ching-Chung Yin. Department of Mechanical Engineering National Chiao Tung University. ABSTRACT. This thesis presents the development of an ultrasonic motor (USM) driven by circumferential ridge waves traveling along a disc-shaped stator.. A. stiffening ridge is provided around the outer periphery of the stator to reinforce its torsional rigidity. The piezoelectric annular disc adhered under the stator is excited by two sets of alternating voltages to generate two equal-intensity standing waves with 90 degree phase difference.. Both standing wave modes. interfere constructively with each other to induce a traveling wave whose direction can be switched by phase lag or lead between these modes. A number of projectors with 30 degree inclined surfaces deposit on the outer ridge to enlarge the amplitudes of traveling flexural waves.. Design. parameters of the stator including its outer diameter, thickness and height of the ridge are selected.. Numerical analysis on dynamic response of the USM was. carried out by use of finite element method.. Based on modal separation. results of the stator, the flexural mode F(1, 3) was considered to drive the USM. The optimal design has another objective seeking to maximize the aspect ratio of elliptical trajectory for the motion of a particle on the contact interface. The performance of a USM prototype was measured experimentally.. The. USM with stainless steel rotor coated by a wear resistant material, Teflon, ii.
(5) achieves the maximum revolution speed and torque up to 101.6 rpm and 8.16 Mn-m, respectively.. The presented USM has merits of high torque at low. speed, stable output and quiet performance.. Keywords:. ultrasonic motor, circumferential ridge waves, modal separation, aspect ratio of elliptical trajectory. iii.
(6) 誌 謝 就讀研究所兩年期間,承蒙指導教授 尹慶中博士的細心指導與照 顧,使得學生不僅在學業、生活以及待人處事上均獲益良多,並於本論 文定稿期間逐字斧正,論文始臻完成,在此對老師的照顧致上最誠摯的 謝意。同時也感謝馬劍清老師以及蕭國模老師撥冗擔任口試委員,為本 文提出寶貴的意見,使學生在專業知識的觀念上更明確,論文也更加完 備,對此深表感謝。在學期間,感謝學長游泰和、王多聞、許世明、温 子逵、劉育翔、曾世華、蔡汶志、潘權文、嚴承侯及鄭依烈提供作人處 事及研究學習上的寶貴經驗,讓重光的視野更加廣闊。感謝同學張逸涵 以及黃康哲在重光心情低落時,給予溫柔的鼓勵,同學張逸涵常幫忙買 早餐的這份心意,重光亦將永遠的記在心裡,也祝福你們畢業後順利朝 理想邁進。學妹吳昱瑾及學弟賴佑年、鄭博毅謝謝你們過去一年的陪伴 與幫助,讓重光的研究所生涯增色許多,在此也祝福你們論文順利。 重光最感謝的是父母親二十多年來的養育栽培之恩,以及家人在就 讀期間的支持與鼓勵,使我能毫無後顧之憂的順利完成學業。最後,僅 以此論文獻給父母和家人,以及所有曾經教導我、關心我的師長及朋友 們,願將方帽下的榮耀與你們一同分享。. iv.
(7) 目錄 頁次 中文摘要. i. 英文摘要. ii. 誌謝. iv. 目錄. v. 表目錄. viii. 圖目錄. ix. 第一章. 緒論. 1. 1.1 前言. 1. 1.2 研究背景. 1. 1.3 文獻回顧. 3. 1.3.1 行進波超音波馬達. 3. 1.3.2 接觸分析研究. 4. 1.3.3 摩擦層材料. 6. 1.4 研究目的. 7. 1.5 內容簡述. 7. 第二章. 理論分析. 8. 2.1 壓電效應. 8. 2.2 壓電材料的種類. 8. 2.3 壓電材料的本構方程式. 10. 2.4 壓電結構的運動方程式. 11. 2.5 模態分析. 15. 2.6 暫態分析. 15. 2.7 超音波馬達的雙相致動原理. 16. v.
(8) 第三章. 數值分析模擬與結果. 18. 3.1 三維有限元素分析. 18. 3.2 模態隔離. 19. 3.2.1 共振模態. 19. 3.2.2 模態隔離與共振頻率分佈. 19. 3.3 橢圓軌跡比值設計準則. 21. 3.3.1 雙相致動時諧分析. 21. 3.3.2 橢圓軌跡比值. 21. 3.4 馬達定子幾何尺寸決定. 22. 3.5 暫態響應分析. 23. 3.6 接觸分析. 24. 第四章. 3.6.1 剛體對變形體. 24. 3.6.2 變形體對變形體. 26. 實驗量測與結果討論. 27. 4.1 超音波馬達製作. 27. 4.2 共振頻率量測系統. 28. 4.2.1 阻抗響應分析. 28. 4.2.2 振動頻譜響應. 28. 4.3 實驗量測架構. 29. 4.4 超音波馬達性能量測. 30. 4.4.1 驅動頻率對轉速的關係. 30. 4.4.2 驅動電壓對轉速的關係. 30. 4.4.3 負載對轉速的關係. 31. 4.4.4 負載對扭矩的關係. 31. 4.4.5 扭矩對轉速的關係. 32. vi.
(9) 4.5 暫態響應量測 第五章. 32. 結論與展望. 34. 5.1 結論. 34. 5.1.1 數值分析結果. 34. 5.1.2 實驗量測結果分析. 35. 5.2 未來展望. 35. 參考文獻. 36. 附錄一. 39. 附表. 41. 附圖. 43. vii.
(10) 表目錄 頁次 表 1 不鏽鋼 SUS304 的材料參數. 41. 表 2 壓電陶瓷 PZT-4 的材料參數. 41. 表 3 鐵氟龍的材料參數. 42. viii.
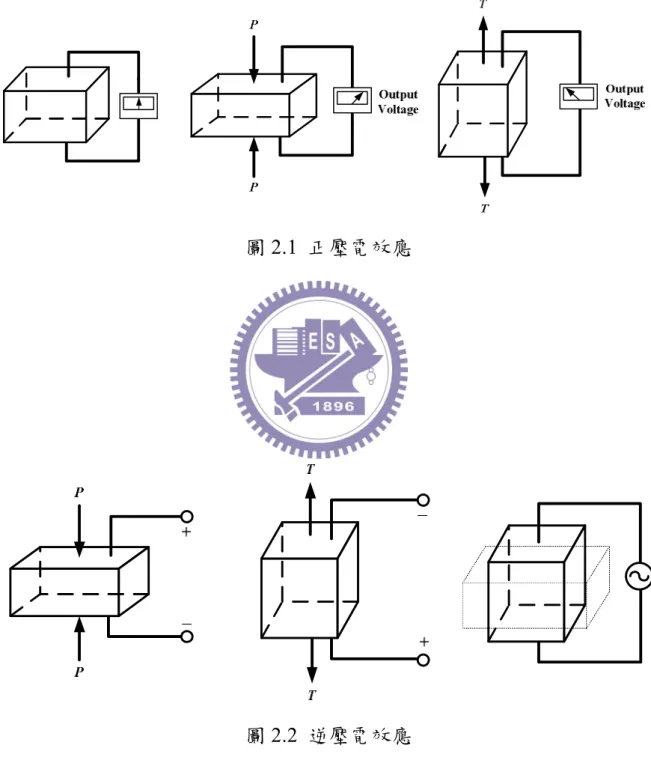
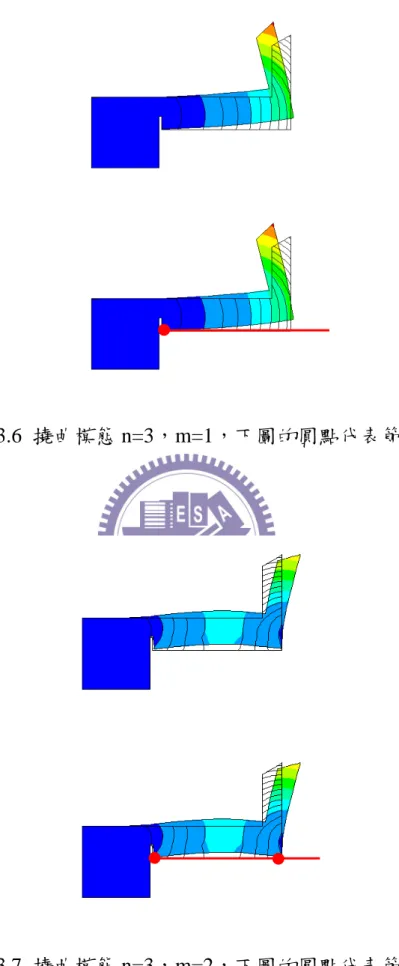
(11) 圖目錄 頁次 圖 1.1 駐波式超音波馬達驅動原理與構造[4]. 43. 圖 1.2 行波式超音波馬達驅動原理與構造[5]. 44. 圖 1.3 本研究提出之超音波馬達定子結構. 44. 圖 2.1 正壓電效應. 45. 圖 2.2 逆壓電效應. 45. 圖 2.3 壓電效應(a)縱效應,(b)橫效應[4]. 46. 圖 2.4 激發行進波之電極配置圖,正負號代表極化方向. 46. 圖 3.1 馬達定子結構示意圖(a)外徑小於壓電圓環,(b)外徑等於壓電 圓環. 47. 圖 3.2 定子的有限元素網格(a)外徑小於壓電圓環,(b)外徑等於壓電 圓環. 48. 圖 3.3 共振模態(a)縱向模態,(b)扭轉模態. 49. 圖 3.4 撓曲模態 m=1,n=3,右圖的直線代表節線. 50. 圖 3.5 撓曲模態 m=1,n=4,右圖的直線代表節線. 50. 圖 3.6 撓曲模態 n=3,m=1,下圖的圓點代表節點. 51. 圖 3.7 撓曲模態 n=3,m=2,下圖的圓點代表節點. 51. 圖 3.8 馬達定子在不同脊緣高度下的共振頻率分佈,t=1.5mm, OD=28mm. 52. 圖 3.9 馬達定子在不同脊緣高度下的共振頻率分佈,t=1.5mm, 53. OD=30mm 圖 3.10 馬達定子在不同脊緣高度下的共振頻率分佈,t=1.5mm, OD=32mm. 54. 圖 3.11 馬達定子在不同脊緣高度下的共振頻率分佈,t=1.5mm, OD=34mm. 55 ix.
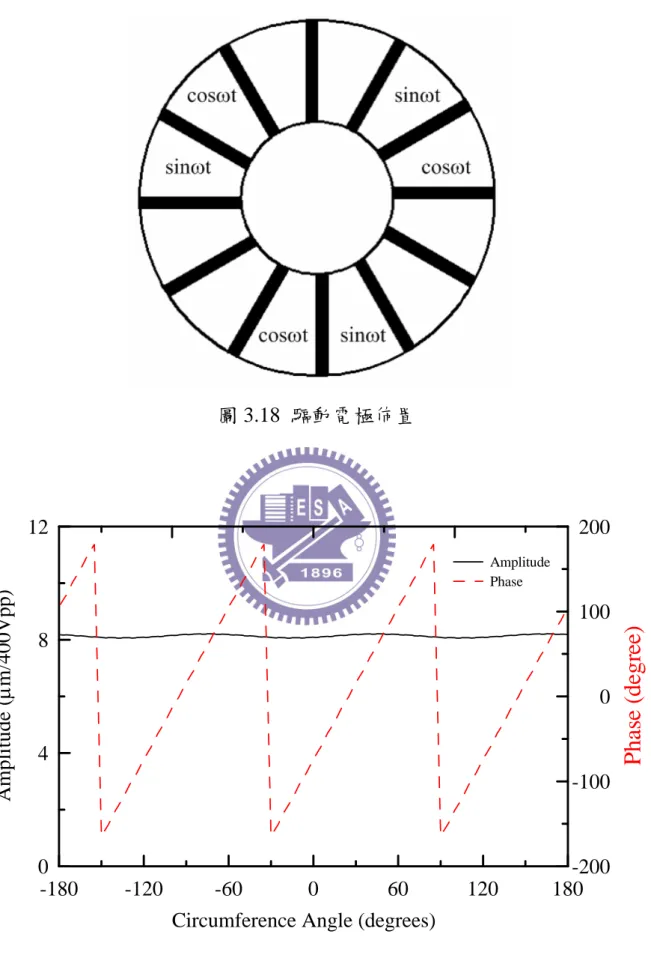
(12) 圖 3.12 馬達定子在不同脊緣高度下的共振頻率分佈,t=1.5mm, OD=35mm. 56. 圖 3.13 馬達定子在不同脊緣高度下的共振頻率分佈,OD=35mm, t=1mm. 57. 圖 3.14 馬達定子在不同脊緣高度下的共振頻率分佈,OD=35mm, t=1.1mm. 58. 圖 3.15 馬達定子在不同脊緣高度下的共振頻率分佈,OD=35mm, t=1.2mm. 59. 圖 3.16 馬達定子在不同脊緣高度下的共振頻率分佈,OD=35mm, t=1.3mm. 60. 圖 3.17 馬達定子在不同脊緣高度下的共振頻率分佈,OD=35mm, t=1.4mm. 61. 圖 3.18 驅動電極佈置. 62. 圖 3.19 撓曲模態 F(1,3)行進波的徑向振幅分佈與相位(OD=35mm, t=1.5mm,h=4mm). 62. 圖 3.20 撓曲模態 F(1,3)行進波的周向振幅分佈與相位(OD=35mm, t=1.5mm,h=4mm). 63. 圖 3.21 撓曲模態 F(1,3)行進波的軸向振幅分佈與相位(OD=35mm, t=1.5mm,h=4mm). 63. 圖 3.22 撓曲模態 F(1,4)行進波的徑向振幅分佈與相位(OD=35mm, t=1.5mm,h=4mm). 64. 圖 3.23 撓曲模態 F(1,4)行進波的周向振幅分佈與相位(OD=35mm, t=1.5mm,h=4mm). 64. 圖 3.24 撓曲模態 F(1,4)行進波的軸向振幅分佈與相位(OD=35mm, 65. t=1.5mm,h=4mm) 圖 3.25 橢圓軌跡比値的座標轉換. 65 x.
(13) 圖 3.26 馬達定子 F(1,3)在不同厚度下的橢圓軌跡比値,OD=35mm 66 圖 3.27 馬達定子 F(1,4)在不同厚度下的橢圓軌跡比値,OD=35mm 66 圖 3.28 馬達定子 F(1,3)在不同外徑下的橢圓軌跡比値,t=1.5mm. 67. 圖 3.29 馬達定子 F(1,4)在不同外徑下的橢圓軌跡比値,t=1.5mm. 68. 圖 3.30 馬達定子 F(1,3)在不同斜齒角度下的橢圓軌跡比値. 69. 圖 3.31 馬達定子 F(1,4)在不同斜齒角度下的橢圓軌跡比値. 69. 圖 3.32 馬達定子尺寸設計方塊圖. 70. 圖 3.33 電壓驅動 500 周期後的周向位移響應. 71. 圖 3.34 電壓驅動 400 周期的周向位移響應(a)驅動電壓,(b)周向位移 響應. 72. 圖 3.35 馬達定子 F(1,3)的周向位移頻率響應曲線,元素數目 900. 73. 圖 3.36 馬達定子 F(1,3)的周向位移頻率響應曲線,元素數目 82,260 73 圖 3.37 超音波馬達包含定子、轉子的有限元素模型. 74. 圖 3.38 超音波馬達包含定子、轉子以及摩擦層的有限元素模型. 74. 圖 4.1 壓電圓環,左為正面電極佈置,右為背面電極佈置. 75. 圖 4.2 放電加工的電極佈置模具. 75. 圖 4.3 超音波馬達定子成品正面. 76. 圖 4.4 超音波馬達定子成品背面. 76. 圖 4.5 超音波馬達的不鏽鋼轉子成品. 77. 圖 4.6 超音波馬達的 UPE 轉子成品. 77. 圖 4.7 超音波馬達的轉子表面鍍鐵氟龍表面處理. 78. 圖 4.8 超音波馬達測試平台. 78. 圖 4.9 實驗量測超音波馬達定子撓曲模態 F(1,3)的阻抗與相位頻譜 79 圖 4.10 實驗量測超音波馬達定子撓曲模態 F(1,4)的阻抗與相位頻譜 79 xi.
(14) 圖 4.11 雷射都卜勒測振儀量測馬達定子共振頻率示意圖. 80. 圖 4.12 LDV 量測馬達定子面外振動的振幅頻率響應曲線. 81. 圖 4.13 LDV 量測馬達定子面外振動的相位頻率響應曲線. 81. 圖 4.14 超音波馬達扭矩與轉速性能測試,實驗架構示意圖. 82. 圖 4.15 使用不同轉子時,超音波馬驅動頻率與轉速曲線. 83. 圖 4.16 使用不鏽鋼轉子時,超音波馬達驅動電壓與轉速曲線. 83. 圖 4.17 使用鐵氟龍轉子時,超音波馬達驅動電壓與轉速曲線. 84. 圖 4.18 使用 UPE 轉子時,超音波馬達驅動電壓與轉速曲線. 84. 圖 4.19 使用不同轉子時,超音波馬達預負載與轉速曲線. 85. 圖 4.20 使用不鏽鋼及鐵氟龍轉子時,超音波馬達預負載與扭矩曲線 85 圖 4.21 使用不鏽鋼轉子時,超音波馬達扭矩與轉速曲線. 86. 圖 4.22 使用鐵氟龍轉子時,超音波馬達扭矩與轉速曲線. 86. 圖 4.23 實驗量測馬達定子 F(1,3)的暫態徑向位移響應. 87. xii.
(15) 第一章. 緒論. 1.1 前言 超音波馬達(ultrasonic motor)又稱為壓電馬達(piezoelectric motor),利 用壓電材料的逆壓電效應,以高頻交流電壓驅動黏貼於彈性體結構之壓 電陶瓷材料,激發整體結構產生特定模態的機械振動,彈性體結構的表 面粒子以週期性橢圓軌跡運動,藉著摩擦驅動馬達轉子作旋轉運動或馬 達滑座作直線移動。由於超音波馬達的振動頻率高且振幅位移量小,故 能執行高精度的控制。 超音波馬達的工作頻率高於人耳所能聽到的範圍,適合應用於需要 安靜的場所。超音波馬達具備低轉速高轉矩、容易控制及精密定位,不 受電磁干擾又不需搭配減速機構的動力特性,使得超音波馬達在某些應 用領域可以取代傳統的電磁馬達。超音波馬達透過摩擦方式驅動,勢必 會產生磨耗,導致馬達扭矩降低。雖然有許多減少磨耗的設計及耐磨性 佳的材料被運用在超音波馬達上,相較於電磁馬達,超音波馬達的使用 壽命較短,是其缺點。 近年來,超音波馬達已經廣泛應用在相機、手錶、醫療設備、航太 工業、精密定位及機器人等精密機械。超音波馬達體積小、重量輕及結 構簡單,相較於同尺寸的馬達能夠輸出更大的扭矩。且不像電磁馬達需 要永久磁鐵,在太空梭、無人探測船、人造衛星等應用,超音波馬達亦 有很大的發展空間。. 1.2 研究背景 超音波馬達的發展可追溯至1973年,Barth [1]提出一駐波式超音波馬 達,利用壓電振盪子的變形,透過類似觸角的放大機構推動轉子旋轉, 1.
(16) 若選擇驅動的振盪子,即可控制馬達轉向,但礙於磨耗問題,沒有付諸 實際應用。 Lavrinenko et al [2]於1976年,提出多種不同結構的超音波馬達,歸 納出馬達具有結構簡單,高扭矩、低轉速、大輸出功率及精密定位等優 點。Vasiliev et al [3]於1979年,利用類似藍杰文(Langevin)振盪子的超音 波換能器產生縱向振動,驅動轉子旋轉,由於無法保持固定振幅以及溫 度、磨耗大等影響,亦無可應用的場合。 Sashida [5]於1980年,提出一楔型駐波式超音波馬達,以藍杰文振盪 子作為驅動源,提高振盪子的位移量,振盪子以橢圓軌跡運動間歇性推 動轉子旋轉,有效的改善因滑動造成能量的損耗。具備高精度、低速高 轉矩等特色,但僅能單向旋轉。直到1982年,Sashida [5]發展出一種新型 行進波式環型超音波馬達。將具有兩組極化方向相反的壓電圓環,黏著 於一具有梳齒狀放大機構的金屬圓環下方,分別輸入兩組頻率、振幅相 等具 90 相位差的正弦波電壓,激發出單方向轉動的行進波。將轉子放置 於金屬圓環上方,藉著兩者間的摩擦力驅動轉子,改變相位差可控制馬 達轉向。另外,在轉子與定子之間黏貼一層耐磨材料,大幅改善磨耗的 問題。此一馬達首先應用在照相機的自動對焦系統中,是第一個達到商 業應用價值的超音波馬達,往後便吸引了許多學者投入研究。 許多超音波馬達曾陸續被提出,根據轉子與定子的接觸形式或定子 被激發的波式,可分為兩類:第一類為駐波 (standing wave)式超音波馬 達,馬達定子以反覆方式振動,定子與轉子作間歇式的接觸,接觸點在 與轉子接觸的面上作一橢圓運動軌跡,推動轉子移動。參考圖 1.1 所示之 圓柱型定子,在階段(1)時,扭轉速度向右,縱向振動位移為最大正值, 使定子膨脹伸長接觸到轉子,並將切線方向振動傳至轉子使其旋轉。在 階段(2)時,縱向振動位移為零,轉子與定子分開,此時切線方向振動為. 2.
(17) 最大值,速度為零。在階段(3)時,定子軸向長度縮短,縱向振動位移為 最大負值,切線方向振動位移為零,扭轉速度向左,並開始返回到原點。 在階段(4)時,縱向振動位移為零,切線方向振動位移為最大負值,速度 為零,此時圓柱體定子保持原來大小,未與轉子接觸。如此週而復始, 便能帶動馬達作單一方向旋轉運動。一般而言,駐波式超音波馬達的成 本低(只需一個振動源)、高效率(理論上可達 98%),但方向不易控制。 第二類為行進波(traveling wave)式超音波馬達,如圖1.2所示,在壓 電體上設置兩組電極,電極產生的電場與壓電體的極化方向相同或反 向,構成兩組換能器,驅動兩組換能器的正弦波訊號頻率與振幅相等, 兩組訊號之間的相位差為 90 ,兩組換能器激振出的共振模態干涉成為一 行進波。定子與轉子保持接觸,接觸點的運動軌跡呈現一橢圓,藉著摩 擦作用驅動轉子旋轉。與駐波馬達不同之處在於其轉子與定子接觸點非 固定,轉子的運動方向與行進波傳遞方向相反。行進波無駐波的節點, 轉子的固定點比較遠離接觸面。行進波式超音波馬達的轉向容易控制, 體積、重量、外型結構設計上較具有彈性,近年來,相關的研究多以行 進波超音波馬達為主。. 1.3 文獻回顧 1.3.1 行進波超音波馬達 Hagood與McFarland [6]於 1995 年,以能量法推導超音波馬達的力學 模型,利用漢彌頓原理與Rayleigh-Ritz模態假設法,將馬達的分析分為定 子振動位移、定子與轉子間的接觸力學以及摩擦力驅動轉子旋轉三種情 形,提出一套分析馬達性能的方法。以數值分析進行暫態響應,模擬不 同預負載下的馬達轉速、扭矩及效率的關係。. Hao與Chen [7]於2006年,提出一環狀行進波式超音波馬達,馬達定 3.
(18) 子類似薄圓盤,其圓盤上分佈70個高度為2mm的梳齒結構,藉以放大振 動位移。以有限元素軟體進行模態分析後,選擇撓曲模態F(1,6)作為激振 模態,並實際製作超音波馬達原型機,在轉子表面鍍上一層耐磨材料-鐵 氟龍。實驗結果顯示,最大扭矩可達0.26Nm,轉速最快可到88rpm。. Kuhn et al [8]於2007年的研究發現,壓電圓盤在厚度0.1~1mm之間, 撓曲模態F(3,6)的最大應變分佈範圍會隨著厚度的增加,由內徑轉移到外 徑圓周上,並在厚度0.9mm時,有最大應變値。建議在設計馬達初期, 應考量到壓電圓盤厚度的影響。. Oh et al [9]於 2009 年,提出類似 Sashida [5]於 1982 年所設計的馬達 定子結構,相異之處在於將定子上的梳齒狀結構分割成 48 個,且製作成 雙側式上下對稱、直徑為 48mm 的金屬圓碟,以壓電圓環黏貼於金屬圓 碟的上下側,能增加振動變形量。超音波馬達原型機採用撓曲模態 F(1,6) 作為激振模態。實驗量測顯示最大扭矩高達 1.8Nm,具有高扭矩低轉速 的能力,優於 Sashida 所提出的馬達,在無負載作用下的轉速可達到. 140rpm。. 1.3.2 接觸分析研究 Maeno et al [10]於 1992 年,以有限元素法分析定子的振動模態,假 設定子不受接觸力影響並忽略轉子的慣性力,計算出定子齒狀凸起的橢 圓運動軌跡與實驗結果有良好一致性。其次,計算定子與轉子間粘滯. (stick)、滑動(slip)的行為,求出位移與速度的分佈、轉子轉速及馬達的功 率損失。. Frangi et al [11]於2005年,應用三維有限元素分析,計算行進波馬達 在驅動頻率、輸入電壓及預負載變化下的機械輸出性能。在忽略阻尼且 無摩擦層狀態下,假設定子為可變形彈性體、轉子為剛體、定子與轉子. 4.
(19) 間的摩擦係數設為0.4,將目標元素加於轉子表面,亦即定子將不會貫穿 轉子。雖然成功地分析出轉速對扭矩之關係,但是數值結果與實驗量測 值誤差過大,最多相差50%。同年,Duan et al [12][13]也提出類似的數值 分析方法,模擬馬達的暫態響應與穩態現象。採用隱式法中的Newmark 時間積分法,施加0.5%Rayleigh阻尼於馬達定子,時間增量分割成輸入電 壓週期的 44 分之一。假設轉子為剛體,以拉格朗日乘數法 (Lagrange. multiplier method)計算切線與法線方向的接觸力。若不考慮接觸、撞擊 (contact-impact)問題時,可由下列四個步驟求得馬達性能:(一)進行模態 分析,求得馬達模態頻率;(二)以共振頻率驅動定子產生行進波,計算定 子的穩態位移與速度;(三)將步驟(二)得到的速度施加於轉子,並給定預 負載完成穩態分析,計算切線、法線方向的接觸力及接觸位移後,計算 出馬達扭矩;(四)重複施加不同的預負載,直到定子的接觸位移達到合理 值。. Pirrotta et al [14]於2006年,分別以解析解及數值分析軟體模擬行進 波式超音波馬達的動態行為,評估預負載對於馬達工作頻率的影響。將 定子與轉子視為不同的系統,假設彼此的接觸壓力為ㄧ線性剛性關係, 在接觸力與扭矩作用下,推導系統動態方程式。模擬結果顯示,預負載 增大時共振頻率有升高的趨勢。. Vasiljev et al [15]於2007年,利用套裝軟體ANSYS模擬超音波馬達的 暫態響應,考慮定子與轉子的接觸問題。馬達轉子由滑塊與摩擦層組成, 使用目標元素 TARGET 170 以及接觸元素 CONTA 174 ,在定子與摩擦 層、摩擦層與滑塊之間建立兩組參數不同接觸對,模擬驅動電壓的前三 個週期內,定子與轉子的接觸點在x、y方向上的位移變化。實驗採用雷 射測振儀量測接觸點的振動振幅,與數值模擬結果誤差在5~8%之間。. 5.
(20) 1.3.3 摩擦層材料 Ueha 與 Tomikawa [4]於 1993 年,回顧多種不同摩擦材料對馬達能量 轉換效率、輸出轉速及最大扭矩的關係,在摩擦層厚度、預負載及驅動 頻率均相同的條件下,聚苯硫醚(PPS)能產生最大的扭矩 0.79Nm 及轉速. 80rpm,輸出功率與轉換效率最佳。此外,摩擦材料的楊氏模數也將影響 馬達的轉換效率。. Ko et al [16]於 2005 年,將摩擦層材料鍍在定子。分別以熱處理方式 製作玻璃嵌入鐵氟龍(glass embedded Teflon, GET),噴霧技術製作氮化鈦. (TiN)、氮化鋁鈦(TiAlN),以及利用 CVD 化學氣相沉積法製作類鑽石碳 膜(DLC)、矽-類鑽石碳膜(Si-DLC)薄膜,考慮薄膜厚度為 0.5、1、1.5、2、. 2.5 以及 3m。實驗結果顯示,氮化鈦與矽-類鑽石碳膜(Si-DLC)均能提供 極佳的馬達性能,矽-類鑽石碳膜的厚度增加能產生更高的扭矩,在厚度. 2.5m 時有最大值,轉速穩定範圍為 5~20hrs。其次,最大轉速則發生在 鍍膜厚度 2.5m 的氮化鈦(TiN)材料,約 122rpm,類鑽石碳膜的機械性能 輸出為最差。. Ding et al [17]於 2008 年,探討轉子表面硬度在五種情況下,對於馬 達轉速、扭矩及啟動關閉暫態響應時間的影響。實驗以鐵氟龍(PTFE)、 環氧樹脂複材(epoxy composites)、酚醛複材(phenolic composites)及燒結碳 化物(cemented carbide)在轉子與定子接觸面,製作一層厚度 0.2mm 的摩 擦材料。另外,還使用電鍍的方式,但厚度無法控制。結果顯示,當硬 度越高時,例如:燒結碳化物最硬,由於接觸面積較小,雖然轉速會增 加,但是造成扭矩降低,並且產生雜音。反之,硬度低時,例如:鐵氟 龍,轉速會降低,卻能提供轉動的扭矩最大。由暫態響應結果發現,儘 管馬達啟動時間大約 1ms,但其與關閉時間、轉子硬度之間並無關聯性, 猜測可能是摩擦材料太薄導致切線方向變形量不大,實驗觀察不好進行。 6.
(21) 1.4 研究目的 本研究提出一行進波式超音波馬達,定子是由碟型不鏽鋼製成,外 緣設有加勁突起及斜齒狀放大機構,如圖1.3所示。以兩組相位差 90 的交 流電壓雙相致動,在定子外緣的加勁突起上產生沿周向波傳的指向性行 進波,推動轉子以順時針或逆時針轉動。並製作超音波馬達原型機,進 行機械性能量測。 本研究提供ㄧ有效率的設計程序方法分析超音波馬達的定子,利用 模態隔離概念以及定子與轉子間的接觸橢圓軌跡比值,有條理的找出馬 達定子的適當設計尺寸,決定馬達的最佳幾何參數。 最後,進行超音波馬達的暫態響應分析,驗證模態隔離的效果。並 實驗量測穩態後的轉速與扭矩,探討不同摩擦層材料對馬達性能的影響。. 1.5 內容簡述 本文共分成五章。第一章為研究背景與動機及文獻回顧。第二章是 理論分析,介紹壓電效應及壓電材料的優缺點,並推導超音波馬達定子 的運動方程式,最後說明行進波式超音波馬達的雙相致動原理。第三章 說明應用套裝軟體 ANSYS 進行超音波馬達定子的模態分析及時諧分 析,以馬達定子的外徑、厚度與脊缘高度為設計參數,探討定子撓曲模 態 F(1,3)與 F(1,4)的共振頻率變化及模態隔離的優化,計算行進波位移響 應在定子斜齒面上的橢圓軌跡比值,決定馬達定子的最佳幾何參數,最 後以暫態分析觀察馬達定子的位移響應。第四章則依據第三章所設計的 定子參數,製作超音波馬達原型機,進行性能量測,探討表面塗有鐵氟 龍之三種不同材質的轉子,對超音波馬達輸出轉速與扭矩的影響。第五 章為本研究的結論及展望。. 7.
(22) 第二章. 理論分析. 本章首先介紹壓電原理,探討超音波馬達致動時的壓電效應,並介 紹壓電材料的基本性質,且參考Hagood與McFarland [6]及Lerch [18]的研 究,應用漢彌頓原理與有限元素法,推導超音波馬達定子的運動方程式。 簡介ANSYS暫態響應分析的數值理論及行進波式超音波馬達的致動原 理。. 2.1 壓電效應 壓電效應(piezoelectric effect)包含正壓電效應與逆壓電效應。當壓電 材料承受正向壓力時,壓電材料為了抵抗電偶極矩受到壓縮而變短之趨 勢,產生電壓抗衡以維持原狀態,稱為機械能轉換為電能的正壓電效應, 如圖 2.1。壓電材料受到電場作用時,電偶極矩受電場影響被拉長,壓電 材料會依電場作用的方向變形,此為電能轉換為機械能的逆壓電效應, 如圖 2.2 所示。 材料是否具有壓電性取決於材料本身的晶體結構,結構缺乏對稱中心 的晶體,才具有壓電性。壓電材料的應力 T、應變 S、電場強度 E、電位 移 D 或 極 化 (poling)P 的 電 性 有 相 互 的 關 聯 , 稱 為 機 電 耦 合 (electromechanical coupling)。壓電效應有縱效應與橫效應,當壓電材料形 變與激發電場平行時稱為縱效應(longitudinal effect),若形變與激發電場 垂直則為橫效應(transverse effect),如圖 2.3 所示。. 2.2 壓電材料的種類 具有壓電效應的材料大致可分為五大類,第一類為單晶類(single crystal),例如:石英、羅德鹽、電氣石、鈮酸鋰(lithium niobate,LiNbO 3 )、. 8.
(23) 鉭酸鋰(lithium tantalate,LiTaO 3 )等。第二類為薄膜類(thin film),例如: 氧化鋅等。第三類為高分子聚合物(polymer),例如:PVDF 等。第四類為 陶瓷 (ceramics)類,例如:鈦酸鋇(BaTiO 3 )、鋯鈦酸鉛(lead zirconate titanate,PZT)等。第五類為複合材料(composite material),例如:AFC(active fiber composites)等。 在所有壓電材料中以羅德鹽的壓電常數最大,容易受到空氣的濕氣 而潮解,失去壓電性。其居里溫度僅有攝氏二十四度,超過此溫度便失 去壓電性,不耐高溫,只能在低溫下使用,須作防濕處理。石英為壓電 材料中耐溫最高者,其壓電常數與機電耦合係數均較小,鮮少使用於機 械與電能量轉換率需求較大的場合。 各種壓電材料都有優缺點,例如單晶類有良好溫度特性,但製造困 難,需要有特殊的晶體成長(crystal growth)技術,特性受切面(cut)影響, 某些壓電材料(例如電氣石,羅德鹽等)遇水會潮解。薄膜類壓電材料的製 造需要真空技術,不同真空條件會產生不同的特性。高分子類性質柔軟, 可以做成非常薄的元件,但壓電參數小,需甚高的極化電場,例如:PVDF 在室溫時之極化電場(poling field)高達 4MV/mm。陶瓷類壓電材料的活性 (piezoelectric activity)安定,耐酸鹼,可製成任何形狀,但居里溫度係數 大,與高分子聚合物、複合材料一樣,在製程中需要高壓極化處理,通 常極化電場強度較高分子聚合物與壓電複合材料低甚多,例如:PZT 的 極化電場約只有 3KV/mm 左右。壓電複合材料的特性大約介於聚合物與 陶瓷類之間。 鈦酸鋇的發展較早,是應用普遍的壓電陶瓷,其化學性質穩定,操 作溫度範圍大,機電耦合係數高。後人持續研究其他鈣鈦石(perovskite) 的結構,繼而發展出PZT的壓電材料。本文所採用的超音波馬達致動器即 為壓電陶瓷材料PZT-4。. 9.
(24) 2.3 壓電材料的本構方程式 壓電材料存在機、電能量轉換特性,當壓電結構受電場或機械力作 用時,壓電本構方程式如下:. T cES eT E. (2.1). S. D eS ε E 其中, T 、 S 為應力矩陣及應變矩陣, c E 是固定電場下的彈性剛性矩陣 (matrix of elastic stiffness), e 是壓電常數矩陣(matrix of piezoelectric constants),而 eT 表示 e 的轉置張量(transport matrix), D 是電位移, E 是 電場強度, ε S 是固定應變(constant strain)下的介電常數矩陣(matrix of dielectric constants)。 以圓柱座標表示壓電材料的本構方程式,其中 r 、 、 z 方向以下標 1、2、3 表示,考慮壓電材料的極化(polarization)方向為 z ( x3 )軸方向,具 有橫向等向性(transversely isotropic material)之壓電陶瓷的材料矩陣分別 表示如下: 固定電場之彈性剛性矩陣為 E E E c11 c12 c13 0 0 0 E E E c12 c11 c13 0 0 0 E E E c13 c13 c33 0 0 0 E c 0 0 0 cE 0 0 44 E 0 0 0 0 c44 0 E 0 0 0 0 0 c66 . (2.2). 壓電常數矩陣為. 0 0 0 0 e15 0 e 0 0 0 e15 0 0 e31 e31 e33 0 0 0 . (2.3). 10.
(25) 固定應變之介電常數矩陣為. 11S 0 0 ε S 0 11S 0 S 0 0 33 . (2.4). 應力矩陣 T 、應變矩陣 S 、位移向量 u 、電位移 D 、電場強度 E 與電位能 Φ 分別定義如下:. T r z z rz r . T. S r z 2 z 2 rz 2 r . T. u ur u u z . T. (2.5). D Dr D Dz . T. E Er E Ez . T. Φ Φ 其中,電場強度 E Φ ,應變矩陣 S Bu ,. 0 0 r 1 1 0 r r 0 z 0 B 1 1 r 0 r r 1 0 z r z r 0 . (2.6). 2.4 壓電結構的運動方程式 超音波馬達定子包含壓電陶瓷與金屬彈性體,不考慮定子與轉子間 的接觸正向力與切線力作用,根據漢彌頓原理(Hamilton’s principle),系 統總勢能的一次變分為零,. 11.
(26) t2. T U W dt 0. (2.7). E. t1. 且在時間 t1 與 t 2 之所有場變數(field variables)的一次變分為零。方程式(2.7) 中, T 為馬達定子的總動能,. T. 1 T 1 u ρeu dVe u T ρ pu dV p 2 Ve 2 Vp. (2.8). 此處, Ve 與 V p 分別代表彈性體與壓電陶瓷的體積。 U 為馬達定子的總位 能,. U. 1 T 1 S Τ dVe ST Τ dV p 2 Ve 2 Vp. 1 1 ST ceS dVe ST c E S ST eT E dV p 2 Ve 2 Vp. (2.9). WE 是由於壓電材料所產生的電勢能,. WE . 1 1 ET D dV p ET eS ET ε S E dV p 2 Vp 2 Vp. (2.10). 其中, ce 為彈性體的剛性矩陣, ρe 、 ρ p 為一 3 3 的對角矩陣,分別代表 彈性體與壓電材料的密度,上標點(overdot)代表對時間的偏微分。由有限 元素法[19][20],將馬達定子離散成許多個具有n個節點的連續小元素, 元素內任意點的位移、電位分別表示為內插函數(interpolation functions) 與節點位移、電位的乘積,. u(r , , z ) N u (r , , z ) u(ri ,i , zi ), i 1,2,3, n. (2.11a). Φ N φ. (2.11b). 其中, N u 為位移的內插函數, N 為電位的內插函數, u 為節點的位移向 量, φ 為節點的電位向量。將應變 S 與電位能 Φ 表示成矩陣的形式,則. S Bu B u u. (2.12a). E B φφ. (2.12b) 12.
(27) 將(2.11)式與(2.12)式之單位元素中任意點位移 u 、應變 S 、電位能 Φ 、電 場 E 與內差函數的表示式,代入(2.8)、(2.9)、(2.10)式中,分別表示如下,. T. 1 T 1 u M eu u T M p u 2 2. (2.13a). U. 1 1 (uT k eu) (uT k p u uT k u φφ) 2 2. (2.13b). WE . 1 (φT k φu u φT k φφφ) 2. (2.13c). 其中,. M e NTu ρe N u dVe. (2.14a). M p NTu ρN u dV p. (2.14b). k e BTu c e B u dVe. (2.14c). k p BTu c E B u dV p. (2.14d). k u φ BTu eT Bφ dVp. (2.14e). k φu BTφ eB u dV p. (2.14f). k φφ BT ε S B dVp. (2.14g). Ve. Vp. Ve. Vp. Vp. Vp. Vp. 將(2.13)式代入(2.7)式,整理可得 t2. 1 2 t1 . (u T M e u u T M p u. (2.15). uT k e u uT k p u uT k u φ φ φT k φu u φT k φφ φ) dt 0 對(2.15)式進行變分運算,透過部分積分(integration by part),考慮在時間. t1 與 t 2 時, uT u 0 的限制條件,將(2.15)式整理,並提出 uT 、 φT 、. 13.
(28) u 及 φ ,可得 t t2 1 T 2 T u (M e u M p u k eu k pu k u φφ)dt φ (k φuu k φφφ)dt 2 t1 t1 t2. T M e u T M p uT k e uT k p φT k φu )dt u ( u t1. (uT k u φ φT k φφ ) dt φ 0 t1 t2. (2.16). 因此,馬達定子之運動方程式可表示如下:. M u k u k φ 0 k u k φ 0 u M u k φ k 0. (2.19). uT k u φ φT k φφ 0. (2.20). uu. φu. φφ. T. T. (2.17). uφ. (2.18). T. uu. φu. 其中,M M e M p 為馬達定子的總質量矩陣(mass matrix),k uu k e k p 為馬達定子與機械位移有關的剛度矩陣,各元素的質量矩陣 M 、剛度矩 陣 k uu、k φφ、k φu ( k Tu )均為對稱的實數矩陣,故(2.17)與(2.19)兩式恆等, 同理,(2.18)與(2.20)兩式也恆等。整理(2.17)與(2.18)式,將離散後的元素 組合成全域矩陣(global matrix),可獲得整個系統的運動方程式,. K uu K u φ U 0 M 0 U 0 0 K Φ φu K φφ Φ 0 . (2.21). 若考慮馬達定子受阻尼及外力作用下,可將(2.21)式改成. C 0 U K uu K u φ U F M 0 U 0 0 0 0 K Φ Φ φu K φφ Φ Q . (2.22). 其中,阻尼矩陣 C M K uu , F 為馬達定子與轉子間的接觸正向力與 切線力, Q 為外加電場作用於壓電材料的總電荷量。. 14.
(29) 2.5 模態分析 假設馬達定子系統無阻尼,且無外力作用下,若節點的位移具有時 2 U*e it 、Φ Φe it 與 Φ 2Φe it , 諧因子 e it ,將 U U*e it 、U. 分別代入(2.21)式改寫為. K uu K u φ * 2 M 0 U 0 K K 0 0 φ φφ u Φ . (2.23). 此為特徵值問題,方程組非零解(non-trivial solution)成立的充分條件為. K uu det K u. K u M 0 2 0 K 0 0 . (2.24). 上式即為特徵值行列式, (2.24) 式的 n 個解 ,即為自然頻率 (natural. frequency)。. 2.6 暫態分析 在套裝軟體 ANSYS 的暫態動力學分析中,採用的直接積分法可分為 顯式法(explicit method)與隱式法(implicit method)。顯式法在空間域採用 有限元素法,時間域則採用有限差分法處理各時間的物理量,屬於有條 件穩定(conditionally stable),其時間增量必須足夠小,比較適合短時間的 非線性碰撞力學與波傳問題。ANSYS 的隱式法[21]是採用 Newmark 時間 積分法進行數值分析,其原理是將時間離散成數個積分步驟,前一步驟 的解設為初始條件,代入下一步驟,逐次積分後,求得最後的暫態響應。 其疊代關係如以下二式: n u n 1 ]t u n 1 u n [(1 )u. (2.25). 1 n u n 1 ]t 2 u n 1 u n u n t [( )u 2. (2.26). 其中 u n 代表在時間 tn 的節點位移向量,時間增量 t tn1 tn , 與 是. 15.
(30) Newmark 積分的參數,根據積分精度及穩定性決定。在本研究的分析中, 採用線性加速度法,使 =0.25, =0.5。由(2.26)式可得. n1 u. 1 1 1 n (u n1 u n ) u n 1 u 2 t t 2 . (2.27). 考慮時間 t n + 1 的有限元素運動方程式. n1 Cu n1 Ku n1 Fn1 Mu. (2.28). 將(2.27)式代入(2.25)式的結果,與(2.27)式代入(2.28)式可得. u n1 . 1 Fn1 M 1 1 n 1 u u n n u t K K t 2 2 . C n u n 1 u n 1 t u K t 2 . (2.29). 其中,. K K. 1 M C t t 2. 由 (2.29) 式 即 可 得 位 移 解 。 Newmark 時 間 積 分 法 屬 於 無 條 件 穩 定. (unconditionally stable),可取較大的時間增量 t ,但仍須足夠小,才能收 斂至準確的結果。. 2.7 超音波馬達的雙相致動原理 超音波馬達定子內激發行進波的原理如圖2.4所示。在壓電陶瓷表面設 有A、B兩組電極,若施加相同振幅的交流電壓,這兩組致動器會產生振 幅相同、分別順時針、逆時針方向傳遞的撓曲波,若周向模態數為整數, 會形成駐波,其位移分別以 uA 與 uB 表示。. u A ei ( n t ) ei ( n t ). uB e . i n ( ) ( t ). (2.30). e. i n ( ) (t ). (2.31). 其中 n 代表周向匝數(circumferential number),也等於周向模態數, 代. 16.
(31) 表兩組致動器之間的弧角, 代表 A 、 B 兩組致動器激振的時間差。若這 兩組駐波進行干涉,位移可表示為. . . . u A u B ei ( n t ) 1 e i ( n ) ei ( n t ) 1 e i ( n ). . (2.32). 假設. ei ( n ) 1 , ei ( n ) 1. (2.33). 則這兩組駐波合成為振幅倍增,沿著順時針方向波傳的行進波,表示為. u A u B 2ei ( n t ). (2.34). (2.33)的充分必要條件為 n 2 p , n (2 p 1). (2.35). 此處, p 為整數。經由整理可獲得 A 、 B 兩相致動器之間的弧角 與驅 動時間 關係式為. . T 2 1 (p ), 4 n 4. (2.36). 其中 T 代表週期。. 17.
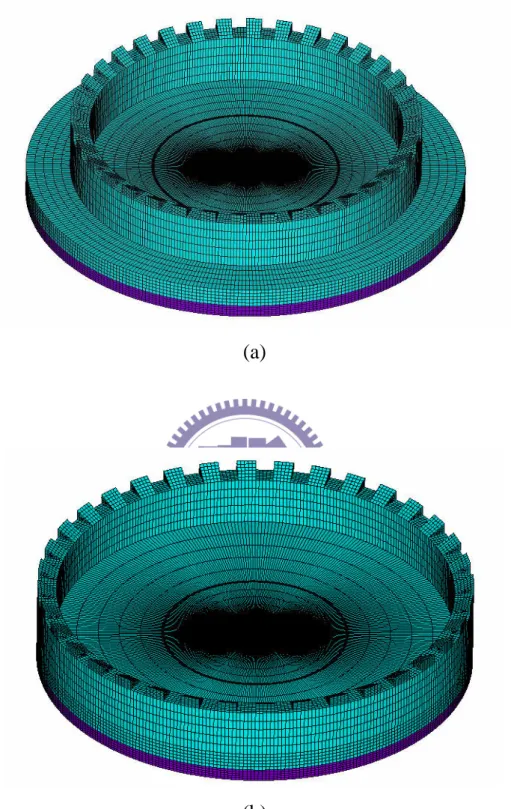
(32) 第三章 數值分析模擬與結果 本研究以有限元素法進行數值分析,採用套裝軟體 ANSYS 10.0 (ANSYS Inc., Canonsburg, PA, USA)模擬超音波馬達定子的動態行為,包 括模態分析(modal analysis)、時諧分析(harmonic analysis)、暫態分析 (transient analysis)等。本章共分為兩部分,第一部分以模態隔離及定子表 面粒子之橢圓軌跡長短軸比值作為設計準則,尋找最佳的激振模態及定 子幾何參數;第二部分針對所設計的馬達定子進行暫態分析,觀察啟動 與停止瞬間,定子周向位移的暫態變化。. 3.1 三維有限元素分析 ANSYS 有限元素套裝軟體的結構動態分析程序主要分成前處理、 分析、後處理三個部份。在前處理部份,先建立馬達定子的幾何模型, 其幾何尺寸如圖 3.1 所示,以碟型定子的外徑 OD、厚度 t 及脊缘高度 h 為設計的變動參數,材料選用不鏽鋼(SUS304)(材料參數列於表 1),碟型 定子底部黏貼外徑 35mm、內徑 15mm、厚度 1mm 的壓電圓環 PZT-4, 材料參數列於表 2(引用 Buchanan[22])。壓電材料的元素型態(element type) 採用 SOLID5 元素,此為 8 節點之三維耦合元素(3-D coupled-field solid), 每個節點有 x、y、z 三個方向的位移自由度及電位,不鏽鋼金屬的元素 型態採用 SOLID45 元素,此元素型態同樣為 8 節點之三維元素,每個節 點有 x、y、z 三個方向的位移自由度,以適當元素數量將模型網格化 (mesh),如圖 3.2 所示。當外徑為 28~34mm 時,元素數目共 100,260,節 點數目為 118,800;外徑固定為 35mm 時,元素數目共 82,260,節點數目 為 99,000。在邊界條件設定上,將定子固定邊的元素各節點之位移自由 度與電位設為零,在壓電圓環電極部份的上下表面元素之電位設為零, 18.
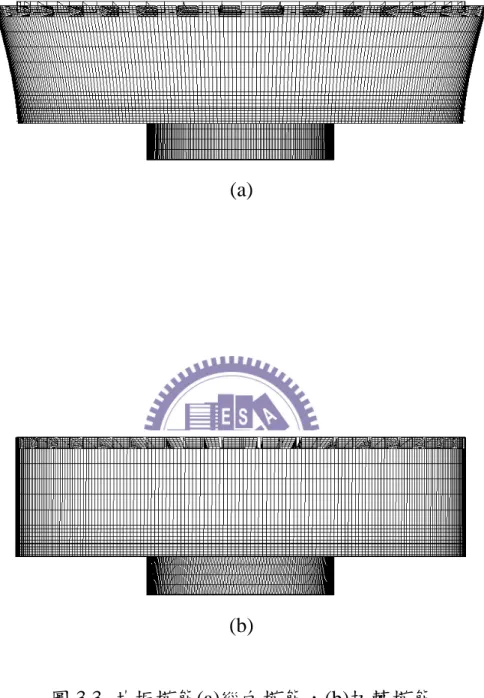
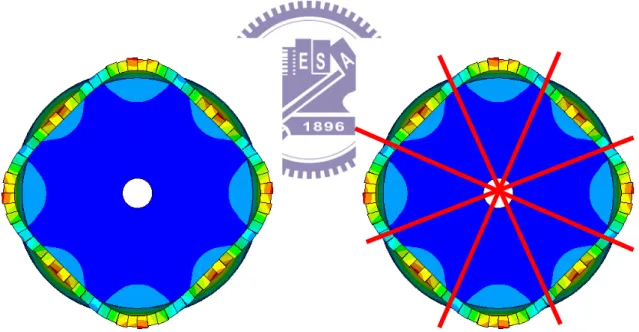
(33) 分別以模態分析、時諧分析與暫態分析模擬共振模態與振動響應。後處 理則是將分析所獲得的數據進行後續圖型化處理。ANSYS 軟體的壓電材 料的剛性矩陣輸入方式與彈性力學教科書的習用規則略有不同,兩者的 差異詳見於附錄一。. 3.2 模態隔離 3.2.1 共振模態 超音波馬達定子的共振模態分為縱向模態(longitudinal mode)、扭轉 模態(torsional mode)及撓曲模態(flexural mode)。圖 3.3 所示分別代表縱向 模態與扭轉模態的變形圖,縱向模態是沿著徑向與軸向運動變形,與周 向(circumferential)位移無關,而扭轉模態則是僅沿著周向運動變形,與周 向位置 θ 無關。本研究是採用撓曲模態的振動驅動超音波馬達,以整數 對(m,n)描述此種模態,其中 m 與 n 均為整數,m 代表碟型定子的徑向模 態數,n 則代表碟型定子的周向模態(circumferential mode)數。參考圖 3.4、 圖 3.5 所示,當 m=1 時,定子的外側脊緣分別產生 3、4 個波形,波形的 個數則代表周向模態數 n。如圖 3.6、圖 3.7 所示,當 n=3,定子外側脊 緣之厚度方向變形有位移為零的節點,節點數目代表徑向模態數 m=1、2。. 3.2.2 模態隔離與共振頻率分佈 超音波馬達是以特定的共振頻率激發出撓曲模態,驅動轉子旋轉。 為了避免激振出鄰近的共振模態,影響振動波形與振幅,甚至降低馬達 的性能與控制性,採用模態隔離(modal separation)的概念,改變定子的幾 何參數,觀察各模態之間的共振頻率關係,使設計的超音波馬達驅動頻 率與相鄰前後兩個共振頻率隔離較遠,至少相隔 3kHz以上,確保不產生 其它共振模態,影響超音波馬達啟動與停止時的暫態響應。 19.
(34) 本研究考慮以撓曲模態 F(1,3)、F(1,4)作為激振馬達轉動的模態。由 馬達碟型定子的外徑 OD、厚度 t 及脊缘高度 h 為設計的變動參數。觀察 與撓曲模態 F(1,3)、F(1,4)鄰近的扭轉模態 T(1,0)、縱向模態 L(1,0)及撓曲 模態 F(2,1)、F(2,2)、F(3,1)、F(1,5),彼此間共振頻率的隔離程度,作為 設計幾何尺寸的考量之ㄧ。模態分析獲得的共振頻率分佈與脊緣高度 h 的 關 係 如 圖 3.8~3.12 所 示 , 其 中 馬 達 定 子 外 側 脊 緣 的 厚 度 固 定 為 t=1.5mm、脊缘高度 h=3~8mm,碟型定子外徑 OD 的範圍為 28~35mm。 圖 3.8 與圖 3.9 顯示,碟型定子外徑從 28mm 增加到 30mm,僅有撓曲模 態 F(1,3)、F(1,4)及 F(1,5)的共振頻率在 h=3、4mm 時,有增加的趨勢, 其餘的共振頻率均降低。碟型定子的外徑從 28mm 變化到 35mm 時,撓 曲模態 F(1,4)與 F(1,5)於 OD=32mm、h=3、4mm 時,出現最大共振頻率。 就本研究設計的定子幾何結構而言,碟型定子的外徑變化對於定子結構 的模態隔離程度影響不大。參考圖 3.10~3.12 所示,當 OD=32、34、35mm, h=8mm 時,撓曲模態 F(1,3)與 F(1,4)與鄰近模態的共振頻率均小於 3kHz, 隔離效果不佳。 圖 3.12~3.17 所 示 為 碟 型 定 子 外 徑 設 為 OD=35mm 、 脊 缘 高 度 h=3~8mm,不同定子厚度的共振頻率分佈圖。觀察可知,隨著厚度增加, 扭轉模態 T(1,0)與撓曲模態 F(2,1)的共振頻率將逐漸降低,其他模態則有 增加的趨勢。以撓曲模態 F(1,3)為例,在碟型定子厚度大於 1.3mm,脊缘 高度 h=3、4、5mm 時,與鄰近模態的共振頻率至少相隔 3kHz 以上,當 厚度增加為 1.5mm 時,在脊缘高度 h=3~7mm 的模態隔離效果將會最好。 其次,當碟型定子的厚度從 1mm 遞增到 1.5mm 時,撓曲模態 F(1,4)的共 振頻率起初均落在撓曲模態 F(2,1)的下方。亦即,當碟型定子的厚度較薄 時,模態隔離的效果在脊缘高度 h=6~8mm 較明顯,隨著厚度遞增,共振 頻率將逐漸超越撓曲模態 F(2,1)並且相交。當碟型定子逐漸變厚,若脊缘. 20.
(35) 高度較小,才有良好的模態隔離效果。. 3.3 橢圓軌跡比值設計準則 3.3.1 雙相致動時諧分析 本研究以時諧分析,模擬馬達定子的合成行進波位移響應。馬達定 子上的兩組壓電換能器分別受到正弦函數 sin(t ) 與餘弦函數 cos(t ) 的激 振,由套裝軟體ANSYS的時諧分析結果,可以獲得正弦與餘弦函數激振 的定子位移響應,包含振幅及相位,將之線性相加,計算行進波的位移 振幅及相位。假設馬達定子的阻尼係數為 0.2% ,以振幅 400V p-p 交流 電壓輸入圖 3.18 所示之A、B相致動器的表面電極。馬達定子與轉子的接 觸點為斜齒面中點,繞圓周一圈,以此作為參考點,計算馬達定子行進 波振幅與相位。 圖 3.19~圖 3.24 所示分別為馬達定子與轉子接觸參考點的撓曲模態. F(1,3)及 F(1,4)之位移分量,計算例中,碟型馬達定子的外徑 OD=35mm、 厚度 t=1.5mm 及脊緣高度 h=4mm。觀察定子脊緣斜齒內側接觸參考點的 行進波振幅與相位分佈,發現相位幾乎呈現線性分佈,代表行進波的相 速度在碟型定子各角度為一個定值。由振幅的分佈可以很明顯的發現, 周向位移比徑向以及軸向位移小,撓曲模態 F(1,3)的波形振幅都很均勻, 代表定子的周向任意位置之表面粒子都具有均勻的運動速率。模擬結果 顯示撓曲模態 F(1,3)比 F(1,4)產生行進波的效果要好,定子周向模態愈高 階,表面質點產生的位移量愈小。. 3.3.2 橢圓軌跡比值 超音波馬達是利用定子與轉子接觸表面質點的橢圓軌跡運動,以摩 擦力推動轉子轉動。Ueha與Tomikawa [4]於1993年曾指出,橢圓軌跡運動 21.
(36) 中的周向位移愈大,則馬達的性能越好、轉速越快。基於此原因,將橢 圓軌跡長短軸比值 U U n 作為超音波馬達的設計準則之一。參考圖3.25 所示,取周向脊緣波的徑向與軸向位移振幅平均值,分別投影到斜齒面 上的切線與法線方向,得到周向位移振幅對法線方向位移振幅的比值, 亦即 U U n 。若 U U n 比值越大,則馬達的周向推動能力越好,壓電圓 環換能器的變形量不需很大即可造成馬達定子斜齒面粒子的周向位移很 大,致動能力佳。 圖 3.26 、圖 3.27 為碟型馬達定子外徑 OD 為 35mm 之定子撓曲模態. F(1,3) 、 F(1,4) 在不同定子厚度及脊缘高度下的接觸參考點橢圓軌跡比 値。結果顯示,橢圓軌跡比値將隨著脊緣高度增加而衰減,F(1,3)的橢圓 軌跡比值均大於F(1,4),在定子厚度為1.5mm時,有最大橢圓軌跡比值曲 線。依據此結果,考慮固定碟型定子的厚度為1.5mm,模擬不同外徑及 脊缘高度下的接觸參考點橢圓軌跡比值,如圖3.28、圖3.29所示。僅在脊 緣高度h=3、4mm之撓曲模態F(1,3)以及脊緣高度3mm之F(1,4)模態時,橢 圓軌跡比值大於1。當定子外徑為34mm,F(1,3)模態有最大橢圓軌跡比値. 1.87。此外,考慮馬達定子之放大機構的斜齒角度對於橢圓軌跡比値的影 響,由圖3.30、圖3.31所示,30度時比値最大。同樣地,驗證了在幾何參 數變動下,F(1,3)模態的橢圓軌跡比值均大於F(1,4)模態。綜合以上三種 模擬結果發現,撓曲模態F(1,3)的周向推動能力將大於F(1,4)模態。. 3.4 馬達定子幾何尺寸決定 本節根據3.2、 3.3 節所得到的模態隔離程度與橢圓軌跡比值設計準 則,決定馬達定子的幾何參數。設計流程以方塊圖表示,如圖3.32所示, 根據橢圓軌跡比值可知,撓曲模態F(1,3)致動能力將優於F(1,4)模態,且 在碟型定子厚度1.5mm時有最大值。此外,碟型定子外徑34、35mm,脊 22.
(37) 缘高度3、4mm都有不錯的比值。基於橢圓軌跡比值準則的分析結果,當 碟型定子厚度為1.5mm、外徑OD為35mm、脊缘高度h為4mm時,模態隔 離的效果最佳,F(1,3)模態的共振頻率與前後相鄰模態相隔至少6kHz,故 以此作為超音波馬達定子的幾何外型尺寸。. 3.5 暫態響應分析 本節針對所設計的超音波馬達定子進行暫態響應分析,考慮電壓隨 時間改變,輸入兩相位差 90 的弦波電壓至 A 相與 B 相壓電換能器後, 激振整體定子結構,觀察馬達定子在啟動瞬間與穩態的位移變化量。馬 達定子的有限元素模型之元素數目共 900,節點數目為 1,800。 本研究採用直接積分隱式法中的 Newmark 法 ,考慮施加的電壓為. 400V p-p,以交流電型態施於定子的六個分佈電極,以撓曲模態F(1,3)之共 振頻率f=24.563 kHz作為施加頻率。根據Bathe[19]指出,暫態分析的時間 增量(time step) t 須滿足 t T 0.01 ,才能求得準確的暫態解。求解時將 驅動週期分成十六等份的負荷增量,時間增量採用自動分割方式,依據 收歛性判斷分割數目,設定程式最多可分割 100 段計算,最少分割 10 段。 定子上各點的初始位移與速度均假設為零。 整體結構的材料阻尼假設為Rayleigh阻尼,根據第二章推導的運動方 程式(2.22)式,阻尼矩陣 C M K ,其中 M 與 K 分別代表結構阻 尼及庫倫摩擦阻尼。假設整個結構阻尼比不隨振動頻率改變,阻尼係數. 0.2% ,以撓曲模態F(1,3)共振頻率與其較高的鄰近模態F(2,1)之共振 頻率,決定 (alpha damping)與 (beta damping),根據公式[21]. i2 2i i. (3.1). 可求得 366.97 , 1.051 108 。 根據上述條件進行超音波馬達定子的暫態響應分析,以周向位置 23.
(38) 等於零度,斜齒狀放大機構的尖端節點作為參考點,周向的位移變化量 如圖 3.33 所示,位移的振幅會逐漸遞增,直到 1.7 msec 出現最大值,之 後,振幅呈現波動狀態增加與減少,一直到了 12.2 msec,也就是 300 周 期以後,定子位移響應的振幅才達到穩定,此時振幅的變化量在穩態平 均值的 1%以內。倘若以雙相弦波驅動定子 400 周期(即時間 16.2 msec) 後,將驅動電壓關掉,如圖 3.34 所示,馬達定子振動位移立即呈現衰減, 約莫在時間 28.5 msec 時,馬達定子達到了靜止狀態。所設計的超音波馬 達在關掉電壓後的 12.3 msec (300 周期)內,即可停止運轉。 將馬達定子撓曲模態 F(1,3)的周向位移響應進行快速傅立葉轉換. (fast fourier transform, FFT)運算,振幅頻譜如圖 3.35 所示。在頻率範圍 0~50 kHz 內,撓曲模態 F(1,3)的共振頻率 f=24.563kHz 處,確實有最大 峰值,其他模態沒有被激振出來,證實前述之模態隔離的效果良好。此 外,在頻率 400 Hz 下,存在一小峰值,原因可能是有限元素的元素數目 不夠,或是元素形狀不適合,造成的數值誤差。圖 3.36 所示係將馬達定 子離散成 82,260 個元素所計算的周向位移振幅頻譜,同樣地,在撓曲模 態 F(1,3)的共振頻率 f=24.058kHz 處,亦有最大值,但在低頻範圍內,並 無明顯的大小值變化。. 3.6 接觸力學分析 本 研 究 將 延 續 3.5 節 的 暫 態 響 應 分 析 , 以 剛 體 對 變 形 體. (rigid-to-flexible)及變形體對變形體(flexible-to-flexible)的假設,進行馬達 定子與轉子的接觸力學分析,模擬超音波馬達實際運作時的轉速與扭矩。. 3.6.1 剛體對變形體 超音波馬達的接觸力學分析包含定子與轉子的有限元素模型,如圖 24.
(39) 3.37所示,轉子材料選用不鏽鋼(SUS304),馬達轉子採用SOLID45元素予 以離散化,轉子視為剛體,定子則為變形體,在轉子與定子的斜齒面上 建立接觸對(contact pair)。定子與轉子在三維空間內作面對面(surface to. surface) 的 接 觸 , 將 目 標 元 素 TARGE170 附 著 在 轉 子 表 面 , 接 觸 元 素 CONTA173附著於定子表面,共用一組實常數,稍後將介紹實常數。 接觸分析屬於非線性分析,其困難在於接觸區域會在每一次疊代時 發生變化,倘若變化過大,或是材料、邊界條件及摩擦係數的變化,都 可能造成無法收斂,必須調整接觸對的關鍵選項,才能收斂至正確的結 果 。 本 研 究 的 分 析 , 接 觸 力 演 算 法 採 用 延 伸 拉 格 朗 日 法 (augmented. Lagrangian method) ,考量接觸剛度 (contact stiffness)FKN 以及貫穿公差 (penertation)FTOLN兩實常數。如果接觸剛度越大,馬達定子與轉子間的 穿透量將會越小,越接近實際情況,但會造成計算收斂困難。但接觸剛 度過小,則求解結果不合理,必須藉由試誤法不斷嘗試以求出較大且合 理結果的接觸剛度。貫穿公差的設定類似接觸剛度,若貫穿量小就越接 近真實,但過小則會造成發散,必須不斷測試以得到夠小的值。此外, 避免接觸正向應力太大造成結果不合理,設定摩擦面的最大剪應力為. max S y. 3 ,其中 S y 為材料之拉伸降伏強度,並將不鏽鋼轉子的接觸摩. 擦係數納入考量, 調整接觸元素與目標元素的關鍵選項(key options),以符合超音波馬 達的研究需求。為了防止接觸對穿透,因此接觸的判斷點採用節點而非 高斯點。當馬達定子與轉子作動時,接觸區域不斷的變化將導致系統剛 度改變,需設定自動更新接觸剛度值,並打開間隙閉合選項,使馬達定 子與轉子一開始即保持接觸狀態。完成建模及接觸對後,邊界條件設為 馬達轉子的徑向位移為零,且受到軸向的預負載作用,接著進行非線性 暫態動力學的分析求解。 25.
(40) 3.6.2 變形體對變形體 第二種情形是將一層摩擦層-鐵氟龍材料黏結於轉子斜面上,材料 參數列於表3,定子與轉子皆設為彈性體。鐵氟龍屬於軟材料,所以將接 觸元素CONTA173附著在其表面,目標元素TARGE170附著於定子的斜齒 面上,有限元素模型如圖3.38所示,其他設定的參數則與3.6.1小節相同。. 26.
(41) 第四章 實驗量測與結果討論 本章根據數值分析結果,決定馬達定子最佳幾何外形,製作超音波 馬達原型機。馬達轉子分別選用不鏽鋼及超高分子聚乙烯 (ultra-high-molecular-weight polyethylene, UPE)塑膠材料製成,並探討轉子 鍍上一層耐磨材料-鐵氟龍,對馬達性能所造成的影響。實驗量測包含馬 達的轉速及扭矩性能。. 4.1 超音波馬達製作 超音波馬達的主要結構包含定子與轉子,其中以定子的結構較為複 雜。定子結構是由碟型不鏽鋼材料及環形壓電致動器所組成。壓電致動 器採用寰辰科技公司(eleceram Inc.)提供的 PZT4 壓電圓環,以粉末冶金 的方式製作。電極佈置如圖 4.1 所示,依據圓周方向生成三個波長的行進 波所設計,極化方法採用潘權文[24]在 2008 年建立的極化程序,但本研 究只採用厚度方向的正向極化,避免壓電材料內部的電偶極矩受雙向極 化影響,導致排列不整齊或甚至於產生內部瑕疵,影響壓電材料的極化 強度,致使超音波馬達的 A、B 相激振強度差異過大。碟型馬達定子是 先以車床加工,外側脊緣製作成頂部具有 30 度的斜錐狀結構,再以放電 加工切割出 36 個斜齒的放大機構,放電加工電極佈置如圖 4.2 所示。最 後採用厭氧膠 Loctite No.648,黏貼壓電圓環於碟型定子的下方,以多芯 線錫銲於 A、B 相致動器,圖 4.3、圖 4.4 為製作完成的馬達定子的正面 與背面。 超音波馬達轉子設計成具有 30 度的斜錐面,與馬達定子內緣作平面 接觸,能承受較多的周向推力,助於提昇轉速。轉子分別選用不鏽鋼以 及 UPE 材料製作,如圖 4.5、4.6 所示,不鏽鋼轉子是以車床加工,ㄧ體 27.
(42) 成形。此外,在不鏽鋼轉子的另ㄧ面進行表面處理,鍍上一層摩擦層材 料-鐵氟龍,如圖 4.7 所示。UPE 轉子則是先以車床分別加工轉軸及圓盤 轉子後,再將兩者黏結在一起。. 4.2 共振頻率量測系統 本研究採用兩種方式量測超音波馬達的共振頻率,一是以網路分析 儀HP-8751A (Agilent Technologies, Santa Clara, CA, USA),量測超音波馬 達 定 子 的 阻 抗 曲 線 圖 ; 另 一 是 以 雷 射 測 振 儀 LV-1720A (Ono Sokki Corporation, Tokyo, Japan)配合頻譜分析儀NF-FRA5087 (NF Corporation, Yokohama, Japan),量測超音波馬達定子機械振動的面外(out-of-plane)位 移之頻率響應,並比較數值模擬與實驗量測的共振頻率之誤差。. 4.2.1 阻抗響應分析 以網路分析儀 HP-8751A 量測馬達定子結構的阻抗響應時,將馬達 定子固定在測試平台上,如圖 4.8 所示,其邊界條件與數值模擬相符合。 網路分析儀提供一正弦波電壓訊號,輸入至定子的 A 相換能器,再由 B 相換能器接收變形產生的電流訊號,輸出至網路分析儀,量測結果如圖 4.9、圖 4.10 所示。在掃頻範圍 20~30 kHz 內,撓曲模態 F(1,3)的共振頻 率為 22.88 kHz,與數值分析所得到的結果 F(1,3)=24.058 kHz,兩者的誤 差約 4.9%。在掃頻範圍 30~40 kHz 之間,撓曲模態 F(1,4)的共振頻率為 37.875 kHz,數值分析獲得 F(1,4)=39.576 kHz,兩者誤差約 4.29%。此外, 撓曲模態 F(1,3)與鄰近模態的共振頻率至少相隔在 6 kHz 以上,實際驅動 超音波馬達時,應該不會有其他的模態被激振出來。. 4.2.2 振動頻譜響應 28.
(43) 都卜勒效應為觀察者與波源間有相對運動時,觀察者所接收的頻率 會隨兩者間的相對速度變化而改變,雷射都卜勒測振儀(laser Doppler vibrometer, LDV)即是依據此原理,利用雷射光照射待測物產生的頻率改 變量,判斷物體表面移動的位移與速度,近年來廣泛的應用於非接觸量 測結構振動位移與速度。本研究以LDV量測振動頻譜的儀器及實驗架構 如圖4.11所示,先以頻譜分析儀NF-FRA5087輸出的正弦波訊號,透過電 源功率放大器NF-HSA4051將訊號增益40倍後,將電壓訊號輸出至黏貼於 馬達定子的壓電圓環A相電極,產生振動。以雷射都卜勒測振儀量測馬達 定子機械振動之面外位移,選擇碟型定子上方兩斜齒放大機構之間作為 量測點,黏貼反光貼紙,將雷射測振儀LV-1720A量測所得的位移訊號輸 入至頻譜分析儀後,即可得到系統的頻率響應曲線。 圖4.12、圖4.13所示,為馬達定子面外振動的頻率與相位響應曲線, 量測結果顯示,撓曲模態F(1,3)、F(1,4)的共振頻率分別為22.8kHz與 37.2kHz,並且與網路分析儀HP-8751A所量測出的馬達定子共振頻率幾乎 一致。. 4.3 實驗量測架構 本研究的實驗架構如圖 4.14 所示,以函數產生器(Agilent 33250A)輸 出弦波訊號,再經由相移器輸出兩相位差 90 的訊號至功率放大器(piezo. amplifier, AccuSource Electronics Inc., Atlanta, GA, USA, EPA-104),放大電 壓訊號激振馬達定子,控制相移器輸出訊號間的相位領先或落後,可使 馬達正轉或反轉。預負載(preload)是直接由放置於轉子上方的砝碼重量決 定,透過聯軸器連接轉軸與譯碼器(encoder HTR-3A , 1,000 ppr, Hontko. Inc.) ,擷取訊號計算馬達轉速。本實驗以編碼器配合荷重元 (load cell, LSM400),量測馬達在不同扭矩下的轉速。轉子與鋼絲間是可滑動的, 29.
(44) 轉子另一端切線方向懸掛不同重量的砝碼,以 Futek 公司的荷重元與砝碼 量測馬達的扭矩,荷重元輸出的電壓訊號經由 Vishay 2210B 信號放大器. (Vishay Micro-Measurement, Inc., Munich, Germany)放大並濾波。實驗自動 化量測系統採用 NI 公司之 PXI -6251 訊號擷取卡,讀取扭矩及編碼器的 數位訊號,透過圖形化程式語言 LabVIEW 8.5 軟體量測超音波馬達的轉 速與扭矩值。. 4.4 超音波馬達性能量測 超音波馬達輸出的機械性能優劣是以轉速及扭矩作為評估的標準, 本節以撓曲模態F(1,3)驅動之超音波馬達原型機的實驗量測結果,討論不 同材料製作的轉子及增設摩擦層,對馬達性能的影響。. 4.4.1 驅動頻率對轉速的關係 超音波馬達是在共振頻率下操作,選擇的驅動頻率將會影響其輸出 性能。實際驅動馬達時,轉子的重量及預負載會造成定子的共振頻率偏 移。故先量測不同操作頻率下,馬達的最大轉速,找出對應的最佳驅動 頻率。如圖4.15所示,為施加輸入電壓400V p-p 、預負載0.2N,掃頻範圍. 22~23kHz之下,驅動頻率與馬達轉速的關係曲線。結果顯示,不鏽鋼轉 子在驅動頻率為22.77kHz時,馬達轉速最快,可達97rpm,鐵氟龍及UPE 轉子則是在頻率為22.67kHz時,具有最大轉速。為了充分得到超音波馬 達的最佳性能,往後的實驗將根據使用的轉子,選擇最大轉速對應的工 作頻率作為驅動頻率。. 4.4.2 驅動電壓對轉速的關係 圖4.16、4.17、4.18為超音波馬達於不同預負載下,變化驅動電壓所 30.
(45) 量測到的轉速。實驗結果發現,輸入電壓至少要高於160V p-p ,馬達才會 開始轉動,若使用UPE轉子,驅動電壓臨界值需提升至200V p-p 。隨著預 負載的增加,輸入電壓也必須提昇,才能提供馬達定子產生更大的周向 位移,推動轉子。由於本研究採用的壓電放大器輸出交流電振幅極限為. 400V p-p ,不鏽鋼轉子在承受0.5N以上的預負載時,將無法量測轉速與扭 矩,而UPE及表面鍍鐵氟龍的轉子之預負載極限為0.8N。在無負載、最 大驅動電壓400V p-p 的作用下,採用不鏽鋼轉子的超音波馬達的轉速可高 達104.6 rpm;使用鐵氟龍的轉子,最高轉速為101.6rpm。以塑膠材料製 成的UPE轉子,因為重量太輕,在無預負載狀態下,轉子與定子間無法 緊密接觸,必須施加至少0.3N的預負載,馬達才能轉動,在預負載為0.3N 時,最高轉速可達101rpm。. 4.4.3 負載對轉速的關係 圖4.19為將驅動電壓固定在400V p-p ,採用上述三種轉子所量測的超 音波馬達負載與轉速曲線。當預負載越大時,轉速均有逐漸降低的趨勢。 以這三種情況而言,使用鐵氟龍轉子的超音波馬達在預負載0.4~0.7N作用 下,轉速變化較平穩,UPE轉子的機械輸出性能最佳,在較大的預負載 作用下,也能保持較高的轉速,但缺點是金屬與塑膠接觸所發出的噪音 很尖銳,讓人感到不舒服。. 4.4.4 負載對扭矩的關係 根據扭矩量測實驗的架構,必須將鋼絲繞過轉子上方銅圓柱體的凹 槽,使轉子沿切線方向受拉力影響,在實際驅動時,超音波馬達的定子 與轉子間會產生大間隙,無法緊密接觸,至少需要施加0.1N的預負載作 用,馬達才能轉動及量測扭矩。此外,UPE塑膠轉子的重量太輕,本實 31.
(46) 驗架構無法量測其扭矩。 同樣地,驅動電壓固定在400V p-p 時,負載對扭矩的量測結果如圖4.20 所示,當預負載增大後,超音波馬達能提供更大扭矩,其中,又以鍍鐵 氟龍的轉子產生的扭矩均大於不鏽鋼轉子,並在預負載0.6N作用下,能 提供最大的轉動扭矩8.16 mN-m。. 4.4.5 扭矩對轉速的關係 圖4.21、4.22為超音波馬達的扭矩對轉速之性能指標曲線。使用不鏽 鋼轉子的超音波馬達若要提供大於3.67 mN-m的扭矩,帶動其它機構元件 時,轉速將會急速下降。採用鐵氟龍轉子的馬達則在高扭矩輸出範圍. 6.9~8.14 mN-m時,具穩定的低轉速特性。 綜合以上實驗結果,當實際驅動超音波馬達時,若以轉速為考量, 可採用不鏽鋼轉子,缺點是不鏽鋼轉子與定子相互碰撞會發生噪音,長 時間的驅動會造成金屬表面磨耗嚴重,影響馬達性能與壽命。若以高扭 矩為考量時,則必須於轉子表面鍍上一層抗磨耗材料,例如:鐵氟龍, 有助於減少磨耗,馬達也不會發出尖銳的噪音。. 4.5 暫態響應量測 本研究以雷射都卜勒測振儀量測馬達定子驅動時的暫態位移響應。 先以振動頻譜響應測得馬達定子撓曲模態 F(1,3) 的共振頻率為 f=22.8. kHz,以此作為驅動頻率及輸入電壓 400V p-p 激振馬達定子,量測參考點 設為碟型定子脊緣斜齒放大機構的外側,以示波器即時接收雷射都卜勒 測振儀輸出的訊號,量測結果如圖 4.23 所示。馬達定子在時間 0.38s時啟 動,量測點的位移會發生跳動向下-150m,然後向上位移約 33m,隨後 逐漸遞減,最後在關閉電壓處(時間 4.4s),有一瞬間向上約 56m的跳動 32.
(47) 值。在實際驅動時間內,馬達定子位移量無明顯的變化,猜測是位移量 的訊號小於電磁波雜訊,導致實驗觀察有困難,故無法定量量測馬達定 子的暫態位移量。. 33.
(48) 第五章. 結論與展望. 本研究研發出ㄧ種以脊緣波致動,在碟型定子上產生指向性行進波 的超音波馬達,成功地製造出馬達原型機。藉助套裝軟體ANSYS進行數 值分析,包含模態、時諧以及暫態響應分析。根據模態隔離的概念及定 子與轉子間接觸點的橢圓運動軌跡比值,作為設計超音波馬達定子的準 則,建立適用初期設計超音波馬達的方法。馬達性能量測實驗包括轉速 及扭矩,考慮驅動電壓、工作頻率及預負載對於馬達性能的影響。本章 總結數值分析與實驗量測結果,提供日後相關研究參考。. 5.1 結論 5.1.1 數值分析結果 本研究根據馬達定子的模態分析結果,由模態隔離的程度決定定子 結構的尺寸。改變碟型定子的外徑 OD,F(1,3)撓曲模態與鄰近的共振模 態之間保持良好隔離。改變碟型定子的厚度參數,將嚴重影響模態隔離 的程度,必須在厚度大於 1.3mm 時,撓曲模態 F(1,3)於脊緣高度 h=3、4、 5mm 時,才與鄰近模態的共振頻率相差至少 3kHz 以上,最佳的模態隔 離發生在定子厚度為 1.5mm,且脊緣高度 h=4mm 時,與鄰近模態的共振 頻率相隔至少 6kHz 以上。 時諧分析的結果顯示,以F(1,3)撓曲模態驅動定子之周向行進波的振 幅與相速度,幾乎為一個定值,比F(1,4)撓曲模態驅動之行進波振幅更大 且穩定。周向模態愈高階,周向位移分量將愈小。碟型定子厚度為 1.5mm 時,在外徑OD=34、35mm、脊緣高度h=3、4mm下,馬達定子表面粒子 的橢圓運動軌跡有較佳的比値。根據以上的兩項設計準則,選定碟型定 子幾何尺寸為外徑OD=35mm、厚度 1.5mm及脊緣高度h=4mm,進行超音 34.
(49) 波馬達原型機的細部設計製造。 由暫態響應結果可知,以固定交流電壓振幅驅動,馬達定子的周向 位移之振幅隨著驅動時間而遞增,但是位移的振幅會繼而增加或減少, 直到 300 周期(12.2msec)後,定子的位移響應才到達了穩態,此時位移振 幅的變化量小於穩態平均值的 1%。若關掉驅動電壓後,在 300 周期 (12.2msec)內,周向位移的變化量將衰減為零,馬達停止運轉。. 5.1.2 實驗量測結果分析 馬達的性能測試實驗結果顯示,馬達定子於實際運轉時,最佳性能 的驅動頻率受到轉子及預負載的影響,會略低於網路分析儀量測的共振 頻率値。驅動電壓必須在 160V p-p 之上,馬達才會轉動,若是使用UPE轉 子,則驅動電壓門檻值需提升至 200V p-p。使用不鏽鋼轉子的馬達,雖然 轉速可高達 104.6rpm,但與UPE轉子同樣會產生接觸噪音,故不建議使 用。將馬達轉子經過表面處理,鍍上一層耐磨材料鐵氟龍後,實際運作 時,不會有尖銳的噪音產生。在輸出最大扭矩為 8.16 mN-m時,轉速為 19.4rpm,具有高扭矩、低轉速的特性。. 5.2 未來展望 超音波馬達的振動位移量為微米(m)等級,未來可以採用光學量測 技術-電子斑點干涉術(electronic speckle pattern interferometry, ESPI),測量 馬達定子表面的面內位移變形,驗證實際驅動時,馬達的共振模態,與 數值分析的結果相互比較。 本研究尚未求得馬達定子與轉子之間的接觸力學數值模擬完整結 果,未來可繼續針對摩擦層厚度、材料及接觸應力進行暫態分析,模擬 馬達運轉的真實情況,並計算馬達穩態的轉速與扭矩。 35.
(50) 參考文獻 [1]. H. V. Barth (1973), “Ultrasonic driven motor,” IBM Tech. Disclosure Bull., 16(7), 2263.. [2]. V. V. Lavrinenko, V. S. Vishnevski, I. A. Kartashev (1976), “Equivalent circuits of piezoelectric motor,” Bulletin of Kiev Polytechnical Institute Series, Radio-Electronics, 13, 57-61.. [3]. P. E. Vasiliev, P. A. R. Klimavichjus, A. V. Kondratiev, J. J. Matsjukyavichjus, G. V. L. Beksha, V. A. Kaminskas (1979), “Vibration motor control,” UK Patent Application GB2020857(A). [4]. S. Ueha and Y. Tomikawa (1993), Ultrasonic Motors Theory and Applications, Clarndon Press, Oxford.. [5]. S. Sashida and T. Kenjo (1993), An Introduction to Ultrasonic Motors, Clarndon Press, Oxford.. [6]. N. W. Hagood and A. J. McFarland (1995), “Modeling of a piezoelectric rotary ultrasonic motor,” IEEE Transactions on Ultrasonic, and Frequency Control, 42(1), 210-224. [7]. M. Hao and W. Chen (2006), “Analysis and design of a ring-type traveling wave ultrasonic motor,” IEEE International Conference on Mechatronics and Automation, 1806-1810.. [8]. G. G. Kuhn, C. R. Rodrigues, R. S. Pippi (2007), “Analysis of PZT layer thickness in traveling wave ultrasonic motor performance,” Proceedings of 2007 IEEE Ultrasonics Symposium, 2551-2553.. [9]. J. H. Oh, H. E. Jung, J. S. Lee, K. J. Lim, H. H. Kim, B. H. Ryu, and D. H. Park (2009), “ Design and performances of high torque ultrasonic motor for application of automobile,” J. Electroceram, 150-155.. [10] T. Maeno, T. Tsukimoto, and A. Miyake (1992), “Finite-element analysis of the rotor stator contact in a ring-type ultrasonic motor,” IEEE Transactions on Ultrasonic, Ferroelectrics, and Frequency 36.
(51) Control, 39(6), 668-674. [11] A. Frangi, A. Corigliano, M. Binci, P. Faure (2005), “Finite element modelling of a rotating piezoelectric ultrasonic motor,” Ultrasonics, 43(9), 747-755. [12] W. H. Duan, S. T. Quek, S. P. Lim (2005), “Finite element analysis of a ring type ultrasonic motor,” Smart Structures and Materials, 5757, 575-585. [13] W. H. Duan, S. T. Quek, S. P. Lim (2007), “Finite element solution for intermittent-contact problem with piezoelectric actuation in ring type USM,” Finite Elements in Analysis and Design, 43(3), 193-205. [14] S. Pirrotta, R. Sinatra, A. Meschini (2006), “Evaluation of the effect of preload force on resonance frequencies for a traveling wave ultrasonic motor,” IEEE Transactions on Ultrasonic, Ferroelectrics, and Frequency Control, 53(4), 746-753. [15] P. Vasiljev, D. Mazeika,G. Kulvietis (2007), “Modelling and analysis of omni-directional piezoelectric actuator,” Journal of Sound and Vibration, 308(5), 867-878. [16] H. P. Ko, S. Kim, J. S. Kim, H. J. Kim, S. J. Yoon (2005), “Wear and dynamic properties of piezoelectric ultrasonic motor with frictional materials coated stator,” Materials Chemistry Physics, 90(2-3), 391-395. [17] Q. J. Ding, L. Yang, and C. S. Zhao (2008), “Effect of hardness of frictional materials on properties of ultrasonic motors,” Proceedings of Symposium. on. Piezoelectricity,. Acoustic. Waves,. and. Device. Applications, 434-438. [18] R. Lerch (1990), “Simulation of piezoelectric devices by two- and three-dimensional finite elements,” IEEE Transactions on Ultrasonic, and Frequency Control, 37(2), 233-247. [19] K. J. Bathe (1996), Finite Element Procedures, Prentice-Hall, New 37.
(52) Jersey, USA. [20] O. C. Zienkiewicz (1971), The Finite Element Method in Engineering Science, McGraw-Hill, New York. [21] ANSYS, Inc., Release 10.0 Documentation for ANSYS: Structural Analysis Guide, Transient Dynamiic Analysis, SAS IP, Inc., USA, 2005. [22] R. C. Buchanan (ed.), Ceramic Materials for Electronics, 3rd Edition, Marcel Dekker, Inc., New York, NY, 2004. [23] ANSYS, Inc., Release 10.0 Documentation for ANSYS: Coupled Field Analysis Guide, SAS IP, Inc., USA, 2005. [24]. 潘權文(2008), 高階周向波式碟型超音波馬達的研發, 國立交通大 學機械工程學系碩士論文, 新竹市, 台灣.. 38.
數據


![圖 1.2 行波式超音波馬達驅動原理與構造[5]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8028310.161288/58.892.136.750.192.1064/圖12行波式超音波馬達驅動原理與構造5.webp)
+7

相關文件
實習老師 教 甄試教者 實 習老師 輔導 老師 正式教 師 教授,研 究員 同事..
This research attempts to establishment the whole valuation mode that cures of a stream, providing a valid and complete valuation method, with understand the engineering whole
中華大學應用數學研究所 研 究 生:黃仁性 敬啟 指導教授:楊錦章 教授 中華民國九十六年..
A diamagnetic material placed in an external magnetic field B ext develops a magnetic dipole moment directed opposite B ext.. If the field is nonuniform, the diamagnetic material
10 Magnetism of Matter 磁 性 Electromagnetic Waves 電磁 波. How can a clay-walled kiln reveal
之意,此指依照命令動作的意義。所謂伺服 系統,就是依照指示命令動作所構成的控制
根據冉雲華教授〈中國早期禪法的流傳和特點〉一文的研究,中國佛教從第五世紀後期 到第七世紀初,禪法開始在各地流傳開來,大致發展成四個不同的流派: (一)
教授 电视播音主持 电视播音主持业务 播音主持业务研究 业务研究.. 教授
