IR:Item 987654321/4159
66
0
0
全文
(2) Campbell,1982) 。近網截擊以點擊式截擊(drop volley)為主, 而重擊式截擊和點擊式截擊是兩種明顯不同的截擊方式。重擊 式截擊利用小幅度後拉拍將球推送出,需要長時間的上半身活 動,故時間的拿捏很重要,且擊球瞬間將加快拍頭的速度。點 擊式截擊不強調後拉拍動作,球拍與球 短暫接觸的截擊,擊球 瞬間放慢拍頭的速度。專業的網球選手須具有重截擊與點截擊 兩種截擊技能,又因此兩種技能分別於遠網與近網截擊時為優 先選擇的截擊方式,而中場截擊則不然,故本研究以重截擊與 點截擊為研究主題。 事實上,網球截擊時,若因球員之間的距離縮短,則需瞬 間做出快速的移動和反應。球員對高速擊球都應有絕佳的反應 與判斷,這與上肢扮演的角色有直接關係(Groppel, 1992)。 截擊動作在網球擊球中屬於高技巧的動作,初學者常因不正確 動作導致運動傷害,藉由歸納優秀網球選手在不同截擊模式的 動作表現,可供初學者作為典範 。在 以往研究中截擊動作在軀 幹與上肢各關節、肢段的運動學資料明顯的不足 ,實有必要通 過結合影像與電腦自動運算模式而成的三度空間運動分析系 統進行研究,可以提供完整的運動學參數。. 第二節. 研究目的. 基於上述問題背景,本研究之目的在於: 一、探討重擊式與點擊式截擊在不同擊球側時,上肢各關節與 軀幹之運動學。 二、 比較重擊式與點擊式截擊動作之差異。 三、透過肢體動量傳遞的參數以及球速的差異,探討兩種截擊 動作的效果。 2.
(3) 第三節. 研究假設. 假設一:重擊式與點擊式截擊在不同擊球側,軀幹與上肢 各關節在動作過程的 運動學及上肢各肢段之動量參數有顯著 差異。 假設二:重擊式與點擊式截擊在軀幹與上肢各關節在動作 過程的運動學及上肢各肢段之動量參數有顯著差異。. 第四節. 研究範圍與限制. 本研究藉由六位男子網球選手,針對本研究實驗設計並蒐 集所得之資料為本研究範圍。 本研究在人體動作生物力學實驗室進行,以網球發球機從 事定點網球截擊動作之研究。為了減少實驗過程的變數, 而更 能仔細探討不同截擊動作的差異,因此採用同樣的球拍、球速 以及握拍方式進行實驗。. 第五節. 研究假定. 一、本研究將人體上肢及軀幹視為多剛體系統,其由手、前臂、 上臂、軀幹及骨盆所組成。同時並將假設每個肢段視為密 度均勻之剛體,而肢段間之關節皆視為球關節。 二、發球機架設距離為完成第二回球預備截擊位置,與實驗參 與者的距離約為八公尺。因為發球機可以以固定的速度與 來球型態發球,故各 實驗參與者 確實可以表現兩種截擊動 作。. 3.
(4) 第六節. 名詞解釋與操作性定義. 一、 重擊式截擊( punch volley) 小幅度後拉拍將球推送出特定場區,需較長時間的上半身 活動,故時間的拿捏決定擊球瞬間加快拍頭的速度。本研究要 求實驗參與者作十次重擊式截擊,並取其平均值進行分析。 二、 點擊式截擊( drop volley) 不強調後拉拍動作,球拍與球短暫接觸的截擊,將使擊球 瞬間放慢拍頭的速度。本研究要求實驗參與者作十次點擊式截 擊,並取其平均值進行分析。. 第七節. 研究的重要性. 通過結合影像與電腦自動運算模式而成的三度空間運動 分析系統,提供完整的上肢各肢段運動學及動量參數。以三維 運動分析系統來 瞭解網球截擊之上肢各關節與軀幹的動作變 化,提供網球選手正確的截擊動作技術與學理依據,進而減少 運動傷害發生的情形。在教學與訓練成效評估方面,針對個人 截擊動作的優、缺點加以修正,以提高教學效果和增進訓練技 術的水準。同時,亦有助於臨床 醫師及治療師在網球之運動傷 害的診斷及臨床治療。. 4.
(5) 第貳章. 文獻探討. 本研究之目的在於探討網球截擊上肢與軀幹之運動學。茲 分就網球擊球技術之研究、截擊動作之相關研究與截擊動作之 生物力學研究等三個部份,分別進行文獻探討,並歸納文獻探 討的結果。. 第一節. 網球擊球技術之研究. 在各項持拍及不對稱的運動項目中,藉由身體各個部位之 有效整合,將來自地面的反作用力,經由軀幹的旋轉力量,利 用慣用臂一連串的高機械動作完成擊球動作。所有的運動科學 家,教練與球員相當重視當運動進行時,因上肢各關節移動而 造成多次 重複及推進性壓迫而產生的運動傷害。所以,針對上 肢與軀幹之運動學研究顯得普遍且重要,網球運動亦同。 近年來網球都是以運動學及動力學的研究為主要課題,大 部份都是用照相攝影的方式,但是往往局限於二維或不完整的 三維分析。 一、 網球發球之研究 Balius 等人 ( 1995) 主要是分析職業網球選手的運動學資 料,增進職業選手的表現。實驗參與者分二次記錄資料,一為 訓練期,一為比賽期,分別利用二台及四台攝影機來收集訊號 (採樣頻率為 50Hz) 。並且使用直接線性轉換技術及 11 個參數 ( DLT-11) ,以計算在身體及球拍上所貼之 25 個 標記( 23 個貼 於身體, 2 個貼於球拍)的三維位置座標。他們比較兩個發球 之間的差異,經由運動生物力學的資料可提供教練對選手發球 較具體的評估資料。 5.
(6) Ito、Tanabe 和 Fuchimoto( 1995) 則利用三維動態分析系 統,來探討上肢各關節在網球平擊發球之運動學。他們使用兩 台攝影機(擷取頻率為 200Hz)來拍攝三名男子網球選手 的發 球動作,用反光球膚貼於持拍上肢的肩、肘、腕關節及球拍上, 從每一位實驗參與者的網球平擊發球動作抓取 12 次運動學資 料。研究結果指出:內旋可提高拍頭的速度,而內旋之前的外 旋則可增加內旋速度。在關節角速度方面,上臂之內旋運動 ( r=.70,p<.001)、尺骨的屈曲運動 ( r=0.64,p<.001)與旋後 運動( r=.51,p<.01)與球拍速度有明顯相關。而於擊球瞬間, 上臂內旋的速度增加,並達到最高速。 Elliott、 Marshall 和 Noffal( 1995)研究網球強力發球時上 肢肢段旋轉速度在擊球瞬間對球拍所產生的影響,經由三架 200Hz 的攝影機拍攝 11 位慣用右手的男子網球選手。結果顯 示:擊球瞬間球拍頭中心的速度平均達每秒 31.0m,而上臂內 旋、手掌屈曲、上臂的垂直屈曲外展旋轉速度在擊球瞬間佔拍 頭速度的百分比分別為 54.2%、 31.0%、 12.9%,而前臂在肘關 節伸張速度對拍頭速度有負面影響(-14.4%)。 二、 網球反拍擊球之研究 針對不同的網球技術,Morris、Jobe、Perry、Pink 和 Healy ( 1989) 以肌電圖和高速攝影術來探討肘關節在發球、正拍擊 球和反拍擊球的肌肉活動。針對九位職業水準之大專網球選手 評估八條肌群(三角肌、肱二頭肌、肱橈肌、旋前圓肌、伸指 肌、橈側伸腕長肌、橈側伸腕短肌和橈側屈腕肌)之作用情形。 結果顯示出反拍擊球預備期間,所有肌肉都顯示出低活動量; 加速度期間肌肉活動量增加,且有明顯的腕關節伸肌活動,此. 6.
(7) 可能成為受傷因素之一。Giangarra、Conroy、Jobe、Pink 和 Perry ( 1993)同樣針對肘關節在單手反拍與雙手反拍三階段中所扮 演角色加以探討,實驗參與者中單手反拍有十四位和雙手反拍 十 三 位 , 使 用 肌 電 圖 與 十 六 mm 高 速 攝 影 機 ( 採 樣 頻 率 為 200Hz) ,自側面和頂上拍攝記錄實驗參與者的動作和肌肉活動 情形。結果顯示出雙手反拍擊球時橈側屈腕肌以及加速度階段 的旋前圓肌在準備階段期間,活動量比單手反拍大,對於引起 網球肘的腕關節伸肌在肌電圖上卻無差異。 Blackwell 和 Cole( 1994) 比較專業網球選手(八名)與 初級網球員(八名),於單手反拍擊球之腕關節運動學參數和 握力的差異,並使用肌電圖檢測肌肉的活動情形。結果顯示在 擊球瞬間,專業網球選手腕關節伸張角度約為 23°,初級網球 員腕關節屈曲角度約為 13°。專業網球選手的橈側伸腕短肌於 擊球後,較初級網球員有較明顯的肌肉活動現象,唯初級網球 員手腕伸肌的離心收縮使得肌纖維受傷,是造成網球肘的原 因。 Ryu、 McCormick、 Jobe 和 Moynes( 1988) 以肌電圖配合 高速攝影來分析六名大專程度且未受過傷的網球球員,針對發 球、正拍擊球、反拍擊球等三項技術來研究肩關節的動作特 徵,他們將單手反拍擊球分為三個階段來分析,在加速度及跟 隨階段時,活動量最大的是三角肌中間( middle deltoid ) 、棘上 肌( supraspinatus)和棘下肌( infraspinatus)。他們認為網球各 種擊球動作都是由複雜連續的肌肉活動完成的,其中合併了四 肢與軀幹形成的協調模式來完成肌肉活動。 三、 網球正拍擊球之研究. 7.
(8) Elliott、 Marsh 和 Overheu( 1989)以三架攝影機(採樣頻 率分別為兩架每秒 200 張,一架每秒 100 張)從事正手拍抽球 的三 維運動分析,實驗參與者六名都是技術純熟的選手,以比 較水平式後拉拍與半圓式後拉拍在上肢所形成的特有動作特 徵。結果顯示,二者最大的差異在後拉拍完成時的肩關節和肘 關節,此時肘關節伸展範圍較大。半圓式後拉拍的平均角速度 比水平後拉拍大,亦即半圓式後拉拍的揮拍技巧能產生出球拍 和球的更快速度。在擊球瞬間二者並無顯著差異,此時肩關節 角度在半圓式後拉拍是 0.83rad,水平後拉拍是 0.84rad,表示 上臂與身體間保持了適當距離;肘關節角度分別是 2.42rad 和 2.44rad,由此得知上肢並沒有完全伸展;腕關節角度是 2.76rad 和 2.72rad , 腕 關 節 呈 現 屈 曲 , 而 腕 關 節 角 速 度 是 2.6 和 1.4rad/sec。 Van Gheluwe( 1989)採用攝影法研究技術純熟的網球選手 的正拍擊球,發現在接近擊球瞬間,肘關節最高的角速度是 870deg/sec,在擊球時降到 100deg/sec;腕關節則從 350deg/sec 降到大約 0deg/sec 。一般認為擊球時,腕關節置後( laid -back) 並保持穩定,其角度須為 158deg/sec 且是最小的角速度。他進 一步指出:擊球應具有穩定性,即左肩在擊球前不可偏移揮拍 的方向,而身體的重心在向前揮拍之際會逐漸往前,須一直到 擊球後的跟隨動作才提高重心。 Kundson( 1990)利用三度空間的觀念所重建的直接線性 轉換(DLT )方法,測試兩位大學代表隊的網球選手在正手拍 抽球時,肘關節和腕關節的運動學變異情形。使用兩攝影機(頻 率分別是每秒 100 和 200 張 ),結果擊球時腕關節的角速度是. 8.
(9) 5.2±3.4 和 6.5±1.2rad/sec 。 網球運動在發球、正拍和反拍擊球動作之上肢生物力學研 究,已有許多這方面的研究成果,除了提供教練在訓練及成果 評估之參考,進而提高訓練效果和增進網球技術的水準,同 時,亦有助於臨床醫師及治 療師在網球之運動傷害的診斷及臨 床治療。. 第二節. 截擊動作之相關研究. 由以往的文獻回顧可知,網球截擊的重要特徵,通常都是 在時間相當緊迫時候使用,因為球員之間的距離縮短,所以預 期結果、快速反應和快速移動都曾被評估。在快速反應方面, Chow 等 人( 1999a)檢測七位高級網球員在十八種實驗設計(兩 側 Í三 種 速 度Í三種高度)之網球截擊的動作特徵。將截擊動 作分為四個階段:預備期、反應期、向前揮拍以及擊球。研究 結果顯示:正拍和反拍截擊的平均反應時間(從球被釋出後到 球拍開始移動)是 226 及 205ms,具有統計上的差異。擊 球時 間的平均值範圍(從球拍開始移動到球被擊出)是 381(高速) 及 803ms(慢速)。百分之 75 的實驗發現在球被擊出之前,球 拍會立刻向前移動,在正拍與反拍實驗都有類似的情形。打擊 的時間(從球拍開始移動到球被打擊出去)證明具有高技術的 網球球員能夠在少於 0.4second 中完成一次成功的截擊球。 對於快速移動方面,Hughes 和 Moore( 1998)認 為在網球 賽中的無效率的動作對於球員連續往返擊球會造成負面的影 響。以 Wimbledon 網球複賽中的八位男性球員為研究對象。記 錄七場比賽、十四項網球動作表現,作為分析的 資料。結果顯 示,網球發球和截擊時足部移動模式對比賽是有直接的影響, 9.
(10) 即擊球前除了預備 ( ready position) 動作之外,還帶有輕跳動 作 (skipchecks) 的能完成 94%的成功回擊。為了完成擊球而 離開中心線的次數越高,贏球的機會越低( r=-.88,p<.05)。. 第三節. 截擊動作之生物力學研究. 在截擊動作之生物力學研究方面, Kernodle 等 人 ( 1982) 曾就重擊式和抽擊式截擊 (drive volley) 從事運動學分析,受 試 對 象 的 網 球 技 術 水 準 分 屬 三 個 等 級 ( 初 、 中 以 及 高 級 )。實 驗時,站在靠近球網的特定 點,向對面場區底線的特定目標擊 出重截擊和抽截擊,以高速攝影機(每秒 200 張)拍攝,高級 網球選手的兩種截擊都能很正確的將球回擊到目標區,中級程 度的網球選手在抽截擊時大多偏離拍面中心,網球初學者只能 完成重截擊。研究結果顯示:重擊式較抽擊式截擊精確,抽擊 式截擊藉著較大的後拉拍動作,以加強上肢及拍頭的力量,但 是在力量增加的同時,準確性卻因此喪失。技術純熟的網球選 手可以在要求的時間內擊出有效的抽截擊,但是控球能力則大 打折扣,就控球而言,重截擊較抽截擊易控制。 Elliott、 Overheu 和 Marse( 1988)從 發球線和靠近球網的 位置去檢測截擊的動作。球速採用慢速度(打擊前的球速平均 是 15.7m/sec),而且球的位置並不受控制。結果發現球員們能 做出重要的後擺(backswing),以及不論是正拍或是反拍的擊 球時,球拍移動都是在擊球側的肩膀後方。上肢與球拍的移動 都趨於單一關節式,但是在完成截擊動作時,肩關節、肘關節 和腕關節都有發生移動的現象,對於上肢各關節詳細的運動模 式並未加以贅述。 Van Gheluwe 和 Hebbelinch( 1986)從事網球發球、正拍擊 10.
(11) 球和正拍截擊動作的肌肉活化程度和地面反作用力的研究。由 三位 男性實驗參與者使用兩種形式的網球拍進行實驗,使用肌 電訊號收集上肢部位的九條肌肉活動資料,分別是姆指屈肌 ( flexor pollicis brevis) 、肱二頭肌(biceps brachii) 、肱三頭肌 ( triceps brachii )、 旋 前 圓 肌 ( pronator teres )、 肱 橈 肌 ( brachioradialis )、 三 角 肌 ( deltoid )、 胸 大 肌 ( pectoralis major) 、背闊肌( latissimus dorsi)以及棘下肌( infraspinatus), 另外使用測力板量測網球擊球時地面反作用力。該研究將截擊 動作劃分為四個階段︰初期的後擺(introductory backswing)、 向前加速( forward acceleration)、擊球瞬間( impact)和跟隨 動作( follow through)來加以分析。在地面反作用力方面,因 為只使用一塊測力板( force plate) ( 60 公分×90 公分)的緣故, 所以實驗參與者在開始做測試時被要求兩腳必須放置在同一 測力板上。因此,所記錄的地面反作用力就只是換算的截擊動 作的壓力中心,並不能客觀地呈現各下肢的地面反作用力的資 料。肌電圖的資料顯示:在正拍截擊時的加速階段除了肱二頭 肌和肱橈肌之外,其他的肌肉都顯示出非常強的活性,亦即正 拍截擊時較少肘關節屈曲動作,手臂擺動自然有限。正拍截擊 時的前三角肌活性很強,在擊球瞬間和跟隨動作時的胸大肌呈 現些微的活性。這項研究的其他限制就是在收集資料時,並非 在網球場上做這項實驗,而且實驗參與者不是使用自己的球 拍。 Chow 等人 ( 1999b)以七位擁有多年網球比賽經驗的實驗 參與者,檢視包括手臂、肩部、軀幹和下肢的十二條肌肉,在 不同球速( 26.3m/sec、23.1m/sec 以 及 16.5m/sec )、不同高度的. 11.
(12) 正、反拍截擊的肌電活動。使用一台經過修改的發球機置於離 測力板 4.5m 處、兩台高速攝影機( 120Hz)、兩塊測力板和肌 電訊號記錄系統。研究結果顯示:正、反拍截擊時的橈側伸腕 肌( extensor carpi radialis )比橈側屈腕肌( flexor carpi radialis) 活躍,顯示腕關節的伸張和外展動作和握力的重要性。在整個 擊球階段,前中( antero-middle)和後中三角肌(postero-middle deltoid ) 都較為活躍。 最近的研究提供在各種不同球路狀態下的資料,網球截擊 球瞬間的反作用力. 力 矩 ( torque)的特徵以及肌電訊號於肌. 肉(力學)行為表現的量化評估,在在為增加截擊球技術的最 佳表現。. 第四節. 總結. 如上所述,僅有少數學者從事網球截擊動作的研究,與網 球其他擊球技術的積極而廣泛的研究相較之下,倒是失色不 少。網 球截擊動作時,軀幹與上肢各關節的生物力學資料明顯 的不足。角動量的發展過程以及移轉地面反作用力經由身體各 肢段最終傳導到球拍的過程,是網球運動中,最陌生的一個概 念( Groppel, 1984)。至今,仍少有研究是檢視網球截擊時的 角動量。所以本研究的目的是分析重擊式和點擊式截擊在不同 擊球側,軀幹與上肢各關節之運動學以及重擊式與點擊式截擊 動作之差異。通過結合影像與電腦自動運算模式而成的三度空 間運動分析系統,可以提供全方位的運動學參數,如:肩關節、 肘關節、腕關節的運動角度和角速度以及軀幹的轉動角度和角 速度等。透過肢體動量傳遞的參數以及球速的差異,探討兩種 截擊動作的效果, 並藉由分析截擊時角動量的三維變化,以提 12.
(13) 供動作技巧參 考。藉原有之上肢運動分析模式,對優秀的網球 選手的截擊動作,做一詳細而深入的研究。探討不同的截擊方 式在軀幹與上肢各關節的差異,分析建立網球截擊的上肢模 式。. 13.
(14) 第參章. 研究方法與步驟. 本研究之研究方法與步驟共分為六節來加以說明:第一 節︰理論基礎,第二節︰研究對象,第三節︰實驗時間與地 點,第四節︰實驗設備,第五節︰實驗步驟以及 第六節︰資料 收集與處理。. 第ㄧ節. 理論基礎. 一、 模型之建立 本研究中利用生物力學之觀念,並配合人體解剖學之意義 來分析網球截擊之動作。本研究中,將人體上肢及軀幹視為多 剛體系統,其由手、前臂、上臂、軀幹及骨盆所組成( Hole & Koos, 1991)。同時並假設每個肢體為密度均勻之剛體,而肢 體間之關節皆視為球關節 ( ball and socket joint )。為了取得肢 體在 運動中之空間運動軌跡,共安置十六個反光標記於人體上 肢具解剖意義之位置,經由攝影機擷取反光標記軌跡來替代身 體之運動軌跡,以便分析實驗參與者網球截擊時上肢及軀幹各 關節的角運動,其位置如下(圖 3-1)。 (一)劍 突( processus xiphoideus ): A (二)胸骨切跡( sternal notch): B (三)第七頸椎( spinous process of the 7th cervical vertebra ): C (四)肩 峰( acromin process ): D (五)上肢參考架: N、 O 、 P (六)肱 骨內外上髁( medical and lateral epicondyles ): E、 F. 14.
(15) (七)尺骨及橈骨莖突( ulna and radial styloid processes ) :G 、 H (八)第二及第五掌骨頭 ( knuckle II and knuckle V): I 、 J (九)兩側之髂骨前上棘 ( anterior superior iliac pine ): K、 L (十)薦骨上緣( sacrum ): M B. D. C. P N. O. M. A. E. F. G. H I. 圖 3-1. K. L. J. 反光標記位置圖. 其中肱骨內外上髁之反光標記,在揮拍過程中,因皮膚與 骨頭間之滑動量相當大,故未置於身體上,由自然站立時相對 於上肢之反光標記架之位置向量來轉換求得。 二、 座標系的訂立 為取得人體在運動中之空間位置及計算其運動參數,共訂 立了七組空間座標系統。而在分析過程中,視各肢體為剛體, 但由於上肢在持拍揮擊網球之動作中,尺骨及橈骨間有相當大 的相對運動,造成皮膚滑動過量,因此在訂立空間座標時,為 15.
(16) 了避免皮膚移動所產生的誤差,經參考過去之文獻( An、Morrey & Chao,1984;An、Browne、Korinek、Tanaka & Morrey,1991; Su、 Lin 、 Wu、 Chou、 Westreich & An, 1993; Su、 Wu、 Chou & An, 1994),採用了下列的方法來訂立出完整的三維上肢模 式。 (一)實驗室座標系 這個座標系是在實驗前校正時所建立,其由三維動態分析 系統中,共附有八個反光標記之固定立體校正鋼架置於實驗空 間中來建立。此座標系主要目的是建立實驗空間的座標系統, 以利求取各肢體在空間中的位置。如圖 3-2所 示 , M1M2 的方向 為 X軸的方向,並取其單位向量 x$ 。 M1M3 的方向為 Y軸的方向, 並取其單位向量 y$ 。 M1M2 及 M1M3 之外積的方向為 Z軸方向,並 取其單位向量 z$ 。. Z. Y. M3 M1. X. M2 圖 3-2. 校正用之固定鋼架. (二)軀幹座標系 如圖 3-1及 圖 3-3所示,這個座標系建立於軀幹上,將 AB 方 向視為 Z軸方向,並取其單位向量當作 z$ ,再由 CB 與 AB 之外積 決定 Y軸方向,並單位化成單位向量 y$ ,X軸方向之單位向量 x$ 由 y$ 及 z$. 之外積決定。如此,可得一正交之座標系。 16.
(17) Z. C B Y. A. X. trunk coordinate system. 圖 3-3. 軀幹座標系. (三)上臂座標系 如 圖 3-1及 3-4所示,對於右手上臂而言,此座標系原點位 於 D點(右肩峰與鎖骨關節上)。首先取 E、 F之中點為 Q 點,而 由 QD 作單位化得到 Z軸單位向量 z$ ,再由 QD 與 DF 的外積並作單 位化得到 X軸單位向量 x$ ,Y軸單位向量 y$ 則由 z$ 和 x$ 的外積所得。. right upperarm coordinate system. D. Z E. X F. 圖 3-4. Y. 上臂座標系. (四)前臂座標系 同理,其由 E、 F 、 H三點建立此座標系 (圖 3-1及 圖 3-5), 此座標系原點位於 E、 F 之 中 點 S 。 由 FE 方向決定 Y軸 方 向 , 並 作單位化得到 y$ 。再由 y$ 及 HS 的外積並作單位化得到 X軸單位向 量 x$ , Z軸單位向量 z$ 則由 x$ 與 y$ 之外積所決定。 17.
(18) right forearm coordinate system Z. E. X F. Y. H. 圖 3-5. 前臂座標系. (五)橈骨座標系 為了描述前臂的旋前與旋後動作,另外 訂立一橈骨座標 系。橈骨座標系相對前臂之運動可表示旋前與旋後之動作,此 座標系由 E、G、H 建立( 圖 3-1 及 圖 3-6) 。G、H 之中點為 T, Y 軸 由 HG 之單位向量訂立, X 軸 由 Y 軸 及 TE 之外積的單位向 量訂立, Z 軸 為 X 軸 及 Y 軸外積之單位向量決定。. right forearm coordinate system Z. E. X Y. G. H. 圖 3-6. 橈骨座標系. (六)手座標系 如圖 3-1及 圖 3-7, 其 由 G、 H、 I 、 J 四點建立此座標系,首 先 分 別 取 G 、 H及 I 、 J 之 中 點 U和 V, 再 由 VU 決 定 Z軸 之 方 向 ,. 18.
(19) 並作單位化得到 z$ ,再由 z$ 與 UJ 的外積並作單位化得到 X軸之單 位向量 x$ ,最後 Y軸之單位向量 y$ 由 z$ 與 x$ 之外積決定。 right hand coordinate system. Z. X. Y. G H I. J. 圖 3-7. 手座標系. (七)骨盆座標系 如 圖 3-1所 示 , 此 座 標 系 由 K、 L、 M三 點 建 立 此 座 標 系 , 由 LK 方向決定 Y軸方向,並作單位化得到向量 y$ 。再取 K、 L中 點 W , 並 由 WM 及 y$ 的 外 積 並 作 單 位 化 得 到 Z軸 單 位 向 量 z$ 。最 後, X軸方向之單位向量 x$ 由 y$ 及 z$ 之外積決定。 三、 關節運動之解剖意義 由上述所訂立之座標系,因配合了人體解剖之構造。因此, 其座標軸分別代表了人體運動中各關節面之轉軸。在此,先對 人體關節運動之解剖意義作一說明。肩關節運動之解剖意義 ( 圖 3-8 ), 其 繞 三 個 軸 轉 動 分 別 是 屈 曲 ( flexion/extension)、外展 及內旋. 伸張運動. 內收運動( abduction/adduction). 外旋( internal/external rotation)運動。肘關節之主要. 動作 為屈曲 包括了屈曲. 伸張運動(圖 3-9)。腕關節之運動(圖 3-10), 伸 張 運 動 及 尺 向 橈 向 運 動 ( ulnar/radial. deviation ) 。 前 臂 之 主 要 運 動 為 旋 前. 旋 後. (pronation/supination)( 圖 3-11)。至於軀幹而言,上身向前 19.
(20) 傾定義為屈曲 ( flexion),向後仰時則為伸張( extension),向 左 右 側 傾 則 分 別 定 義 為 左 傾 ( left bending ) 及 右 傾 ( right bending),向左右側轉動則分別定義為左旋( left rotation) 及 右旋 ( right rotation)。. (內收) Adduction. Abduction. (外展) Flexion Extension. (屈曲). (伸張). Internal rotation External rotation. 圖 3-8. 肩關節運動之解剖意義. Flexion. (屈曲). 圖 3-9. (內旋) (外旋). Extension. (伸張). 肘關節運動之解剖意義. 20.
(21) (伸張). Extension. (尺向偏移) Flexion. (屈曲). Radial deviation. Ulnar deviation. (橈向偏移). 圖 3-10. 腕關節運動之解剖意義. (旋前). (旋後). Pronation. Supination. 圖 3-11. 前臂 運動之解剖意義. 四、 關節的三維運動分析 一般在三維空間中,肢體相對於參考座標系之運動(本研 究中為實驗室座標系),可以一旋轉矩陣( rotation matrix ) 表 示( An 等人, 1984; An 等人, 1991; Haug, 1992)。如圖 3-8 肢 段 1 相 對 於 參 考 座 標 系 之 空 間 運 動 可 以 一 旋 轉 矩 陣 Rd 來 表 示。同理,肢段 2相對於參考座標系之空間運動,亦可以一旋 21.
(22) 轉矩陣 Rp 來表示。而肢段 1相對於肢段 2之運動則可以由旋轉矩 陣 R j 決定,其與 Rd 、 Rp 之關係式為: ( 1). R j = ( R p ) T ⋅ Rd. 如上式所示,分別將手相對於前臂、前臂相對於上臂、上 臂相對於軀幹及軀幹相對於骨盆之角運動視為腕關節、肘關 節、肩關節及軀幹的角運動。. 肢段 2. R. j. Rp Y. 肢段 1. Rd O. X. Z. 圖 3-12. 肢段相對運動示意圖. 此外,在本研究中,因採用膚貼之反光標記來求取肢體之 運動,故由反光標記所定義出之座標系與人體解剖學上的座標 系會有些許角度之差異,故上述之相對角運動之公式需作些修 正。因此,除了截擊的運動影像外,仍需另外收集一組實驗參 與者之自然站立影像資料,以作為各實驗參與者關節角度之基 準( baseline)。而由於本研究為三度空間的運動分析,各關節 之角度與自然站立時的角度相對差值,並不適合直接以角度值 相減,其必須以自然站立時的旋轉矩陣來修正,修正後之相對 22.
(23) 角運動式子為: R = R j ( o R j )T. ( 2). 其中, o R j 為實驗參與者自然站立時的相對角運動之旋轉矩 陣。在分析各關節在三維空間中之相對角運動時,以尤拉角 ( Euler angle ) 來描述其運動情形。至於在求取尤拉角時,配 合肢體解剖構造及模型中座標系之定義,假設其轉動順序依次 為 繞 Y − X ′ − Z ′′ 軸 旋 轉 。 其 中 , Y 軸 旋 轉 的 意 義 為 屈 曲 動;對 X 軸旋轉代表外展 為內旋. 伸張運. 內收運動;而對 Z 軸旋轉之意義則. 外旋運動。因此尤拉角與肢體間之旋轉矩陣的關係式. 為:. [ ]. R yx ' z' ' (α , β , γ ) = Γij. 3×3. SαSβSγ + CαCγ = CβSγ CαSβSγ − SαCγ. SαSβCγ − CαSγ CβCγ CαSβCγ + SαSγ. SαCβ − Sβ CαCβ . β = tan −1 2(− Γ23, Γ132 + Γ332 ). ( 3). α = tan −1 2( Γ13 / Cβ , Γ33 / Cβ ) γ = tan −1 2(Γ 21 / Cβ , Γ22 / C β ). 其中, S代表三角函數 sin (), C代 表 cos (), Atan2則 表 示 三角函數 tan 之反函數,在計算過程中則考慮到了象限之因素。 α :為繞 Y. 軸之旋轉角度(屈曲. 伸張之角度). 軸之旋轉角度(外展. 內收之角度). :為繞 Z 軸之旋轉角度(內旋. 外旋之角度). β :為繞 X γ. 23.
(24) 五、 動量的計算 線動量( linear momentum , L)是質量與速度的乘積。本 研究探討 上臂、前臂、手部和球拍在截擊動作的線動量, 因為 上述部位對於網球截擊是較有影響的。 ( 4). L = mv. 其 中 m是 每 一 肢 段 的 質 量 , v是 每 一 肢 段 的 質 量 中 心 的 速 度。球拍的質量是直接量得的,質量中心位置則是以攝影機拍 攝球拍上所黏貼的三個反光標記所求出。肢段質量中心是參考 McConville ( 1980) 的 屍體肢段資料而來的。 角動量( angular momentum, H)則為轉動慣量和其角速度 的乘積。本研究探討上肢之 角動量包括上臂、前臂、 手部 和球 拍。假設肢體三軸向均為均質分布,所以肢體角動量可表示為: H = I xω x + I yω y + I zω z. ( 5). 其 中 I x , I y , I z 是 每 一 肢 段 的 主 軸 質 量 慣 性 矩 ( principal 。 ω x,ω y,ω z是每一肢段在主軸的旋 mass momentum of inertia ) 轉 角 速 度 。 球 拍 之 角 動 量 計 算 是 參 考 Brody( 1985) 的 鐘 擺 方 法。. 第二節. 研究對象. 六位男性的全能型網球選手為本研究之實驗參與者,平均 年 齡 26.5±9.4歲 、 平 均 身 高 173.3±3.8公 分 、 平 均 體 重 67.3±11.0 公斤以及 平均球齡 12.5±5.6年( 見 表 3-1) 。所有實驗參與者都是 使用右手的,而且具有多年的網球單打和雙打比賽經驗。收集. 24.
(25) 資料時是在生理最佳狀態下,並且使用相同的球拍來進行的。 表 3-1 參與者. 實驗參與者基本資料 年齡 身高. 體重. 球齡. 握拍法. 最佳成績. (歲 )(公 分) (公斤) (年). 1. 18. 168. 56. 7. 東方式. 青 少 年 18歲 組 前 八. 2. 17. 175. 72. 10. 東方式. 青 少 年 18歲 組 前 八. 3. 37. 173. 65. 15. 東方式. 全國排名雙打季軍. 4. 33. 178. 87. 18. 東方式. 全國排名雙打冠軍. 5. 35. 170. 60. 19. 東方式. 全 國 排 名 單 打 第32. 6. 19. 176. 64. 6. 東方式. 國際青少年單打第9 雙打第5. 在正式實驗之前,每位實驗參與者均須詳細閱讀並完全瞭 解「實驗參與者須知」(附錄 A)的內容,並填具「實驗參與者 同意書」( 附 錄 B),確認願意接受實驗情境條件的規範。. 第三節. 實驗時間與地點. 一、 時間:預備實驗:九十一年一月廿日 正式實驗:九十一年二月四日至二月十日 二、 地點:國立成功大學醫學工程研究所 人體動作生物力學實驗室. 第四節. 實驗設備. 本研究的實驗設備如下: 一、 硬體 (一)動態分析量測系統( HiRES Motion analysis Corp.,Santa Rosa,CA, USA). 25.
(26) 動態分析量測系統是利用光學原理的運動分析量測系 統 , 其 包 括 視 訊 處 理 器 ( I.PC-610 )、 六 部 廣 角 攝 影 機 ( CCD camera)、顯示器 ( monitor) 以及工作站 ( Sun workstation)。 其作用原理與處理流程是由攝影機收集到反光標記所反射回 來的光線訊號,再將這些影視訊號經由視訊處理器轉換成數位 式訊號輸入工作站。接著使用動態分析量測系統的軟體程式 ( Expert Vision Advanced , EVa ),包含系統座標校正,反光標 記辨識及空間軌跡定位。 ( 二 ) 網 球 發 球 機 ( Tournament model 401 , Lobster Inc , Plainfield , NJ, USA) 此網球發球機之球管擺動方式有隨機水平. 垂直、隨機水. 平 以 及 單 一 點 射 出 。 球 送 出 的 間 隔 時 間 可 設 為 3、 6 和 12 second ,球速最高可達 37m/sec ,最低 14m/sec。 二、 軟體 (一) Expert Vision Advanced (二) MATLAB 6.1 (三) Fortran (四) Microsoft Office (五) SPSS 10.0 (六) Origin 7.0. 第五節. 實驗步驟. 一、 建立實驗室座標系 在實驗前,必須先作校正工作,訂出實驗室空間座標系, 以作為求出標記點在空間運動中位置之參考座標。校正方式是 由附有八個反光球之立體鋼架於運動空間範圍內,比較由攝影 26.
(27) 機所量得標記之距離與八個標記間之實際距離來作校正。至於 校正之程序為:在實驗參與者周圍安置六架攝影機,調整攝影 機位置及光圈,使所有標記皆至少能被二架攝影機取到,再藉 由 EVa 軟體,透過攝影機可擷取到八個反光標記之影像,便可 建立實驗室座標系。至於此座標系之可靠性,則可由 EVa 軟 體 中之殘數值( norm of residuals )來判斷。殘數值越小,準確性 越大,若殘數值過大,則必須重新作校正工作。待校正工作結 束後,攝影機之位置便已定位,不可再移動,以確保所有運動 皆在相同之實驗座標系中。本實驗中校正架訂立實驗空間範圍 內靜態資料抓取準確度達到 0.1% 以內。 二、 發球機之架設 在實驗的過程中,為使每個實驗參與者截擊時所接收的球 速和球的軌跡弧度一致,發球機的使用是必要的。本實驗採用 LOBSTER401 型發球機,球速設為 14m/sec,發球機架設在距 離實驗參與者八公尺處,為完成第二回球預備截擊位置。 球離 地高度, 重截擊球介於 實驗參與者肩部與腰部之間; 點截擊球 位於腰高處,為最佳截擊位置。 在每次的資料收集都會使用一 筒新的網球,以確保在各種不同實驗狀況下,球的軌跡能夠一 致。 三、 安置反光標記於肢體上 為了獲得上肢的運動軌跡,利用彈性透氣膠帶將反光標記 置於實驗參與者身體上,以避免反光標記鬆脫滑動,並經由攝 影機擷取反光標記軌跡來代表 身體之運動軌跡。本研究中共使 用十六個反光標記,其位置及個數如圖 3-1,另外四個置於球拍 頭以及拍框兩側以及網球上。其中肱骨內外上髁之反光標記,. 27.
(28) 因此處皮膚容易滑動,在運動過程中並未置於身體上,其可由 上肢之反光標記架來轉換求得。 四、 收集影像資料 (一)自然站立影像 由於上肢在運動中,尺骨及橈骨間有相當大的相對運動及 皮膚滑動量亦相當大,因此肱骨內外上髁之運動資料無法直接 取得,所以在此先收集其在自然站立時相對於上肢之反光標記 架之位置向量,以便在運動中轉換求得肱骨內外上髁之運動資 料。此外,自然站立時各關節的角度亦可以作為各實驗參與者 之基準,以修正各實驗參與者在反光標記黏貼時,反光標記所 定義座標系與解剖學上的座標系之差異。 (二)收集運動資料(圖 3-13) 本實驗利用 HiRES 三度空間運動分析系統,將六台攝影機 安置於實驗參與者周圍,收集各實驗參與者截擊時的肢體運動 軌跡影像資料。實驗參與者以預姿站立於測 試位置上,待啟動 發球機後,網球自發球機釋出,由後擺(back swing)、向前加 速( acceleration) 、擊球( impact)和跟隨動作( follow through) 等完成重擊式和點擊式截擊的全程動作,每 次收集八秒,頻率 為 240 赫 茲( Hz),間隔約為三分鐘,每位實驗參與者各收集 十次成功的截擊。. 28.
(29) 圖 3-13. 收集運動影像資料. 第六節. 資料收集與處理. 由實驗中所量得之肢體運動資料,必須進一步分析才能獲 得所要的關節角運動,其處理程序如下: 一、 由 EVa 軟 體 將 VAC 軟體收集的運動軌跡之影像,由 EVa 軟體先加以追蹤辨識 ( track)。接著,將各反光標記之原 始座標位置以 ASCII 格式輸出。求取各關節之角運動模式 及角度範圍等相關資料。 二、 再利用 Woltring 以 Fortran 語言所撰寫的 GCVSPL 程式 ( generalized. cross-validation. spline. smoothing. ). ( Woltring, 1986) 作 平 滑 化 ( smooth) 處 理 , 以 獲 得 各 標記在實驗室座標系中的位置座標值之軌跡,其截止頻率 (cutoff frequency)取 7.14Hz。由自行撰寫之 MATLAB 語 言程式,求取各關節之角運動、角速度與肢體動量等相關 資料。 三、將每位實驗參與者各十次成功截擊之關節角運動資料加以. 29.
(30) 平均,分別以 t 檢 定( t-test)方法比較截擊方式及不同擊 球側角運動的差異。本研究採用 SPSS10.0 版套裝軟體進 行資料處理,所有統計數值考驗均以α= .05 為顯著水準。 並利 用 Origin 軟體繪成圖表,以利於分析比較。. 30.
(31) 第肆章. 結果與討論. 本章主要是呈現實驗所得的資料經過統計處理之後的結 果,並作進一步的討論,共分四節。第一節是關節之角運動; 第二節是關節之角速度;第三節是肢體動量之傳遞以及第四節 是綜合討論。從以上的實驗結果顯示,各受試者本身的角運動 模式以及角速度變化模式皆非常相似,以下將放置受試者四的 結 果 。 截 擊 整個週期的時 間 , 正 拍 大 約 0.50second ,反拍大約 0.42second 。 此 外 , 各個關節的角度皆以相對於自然站立時的 關節角度來表示(自然站立時關節角度為 0°)。 本 實 驗 的 球 速 , 重 截 擊 正 拍 的 平 均 球 速 為 15.82±5.00m/sec,反拍的 平均球速為 21.62±6.68m/sec;點截擊 正 拍 的 平 均 球 速 為 7.27±3.56m/sec , 反 拍 的 平 均 球 速 為 8.94±2.40m/sec 。. 第一節. 關節之角運動. 本節擬就重截擊與點截擊動作週期:後擺期、加速期和跟 隨動作期,其軀幹、肩關節、肘關節、腕關節與前臂的角運動 模式,分別詳述如下: 一、 軀幹之角運動 (一) 正拍:重截擊時,軀幹之運動在後擺期較點截擊時趨向 右旋和前傾(見圖 4-1),由加 速中期至擊球瞬間則有較大的左 旋與後仰運動,並一直到完成跟隨動作。點截擊同樣先作右旋 和前傾運動,左傾一直持續至完成擊球,加速中期微幅右傾運 動。重截擊在正拍的軀幹前傾運動,在加速中期轉為後仰。. 31.
(32) Trunk. impact. follow through. 20. back swing. acceleration Punch, F(+)/E(-) Punch, L(+)/R bend.(-) Punch, L(+)/R rot.(-) Drop, F(+)/E(-) Drop, L(+)/R bend.(-) Drop, L(+)/R rot.(-). Angle (degree). 10. 0. -10. -20 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-1. 正拍軀幹角運動模式. (二)反 拍:由圖4-2可知,兩種截擊由後擺期就開始前傾運動, 以重截擊的前傾動作大於點截擊,在擊球瞬間達最大角 度。點截擊時,軀幹的左旋運動由後擺期開始一直持續到 結束;重截擊也同樣由後擺期開始作左旋運動,但在加速 中期轉為右旋運動。 Trunk. impact. 20. back swing. acceleration. follow through Punch, F(+)/E(-) Punch, L(+)/R bend.(-) Punch, L(+)/R rot.(-) Drop, F(+)/E(-) Drop, L(+)/R bend.(-) Drop, L(+)/R rot.(-). Angle (degree). 10. 0. -10. -20. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-2. 反 拍軀幹角運動模式. 32.
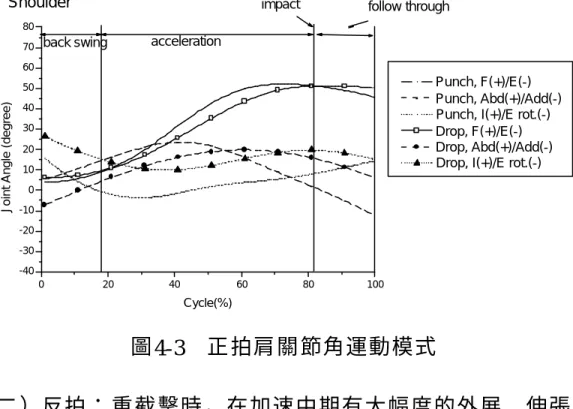
(33) 二、 肩關節之角運動 (一)正拍: 由 圖 4-3 可 知 ,重截擊相較於點截擊會有較 大的 屈曲. 伸張運動以及外展. 內收運動。兩種截擊運動模式. 都由後擺期開始,肩關節就作屈曲運動,直到跟隨動作。 點截擊由後擺起呈微幅外展運動,在擊球前轉而作內收運 動,重截擊則從加速中期有大幅度的內收運動。. Shoulder. impact. follow through. 80 70. back swing. acceleration. 60. Punch, F(+)/E(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 50 40 30 20 10 0 -10 -20 -30 -40 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-3. 正 拍肩 關 節角運動模式. (二)反拍: 重截擊時,在加速中期有大幅度的外展、伸張與 外旋運動(見圖 4-4),並持續至跟隨動作期結束。點截擊 的外展、伸張與外旋運動模式與重截擊相似,只是動作幅 度稍小。. 33.
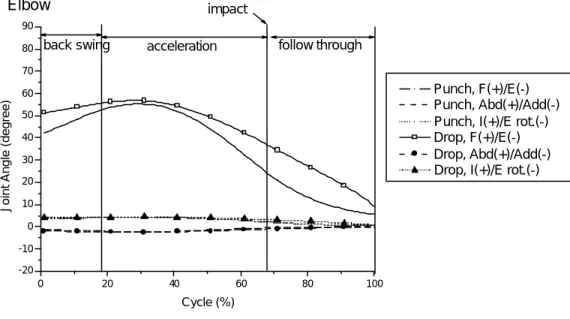
(34) Shoulder. impact. 70 60. back swing. acceleration. follow through. 50. Punch, F(+)/E(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 40 30 20 10 0 -10 -20 -30 -40 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-4. 反 拍肩 關 節角運動模式. 三、 肘關節之 角運動 (一) 正拍:無論點截擊或重截擊一開始於後擺期時皆為屈曲 (見圖 4-5) ,然後在加速期漸伸張並於擊球瞬間幾乎接近 完全伸直。跟隨動作期,點截擊之肘關節屈曲角度較大。. Elbow. impact. follow through. 90. back swing. 80. acceleration. 70. Punch, F(+)/E(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 60 50 40 30 20 10 0 -10 -20 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-5. 正 拍肘 關 節角運動模式. 34.
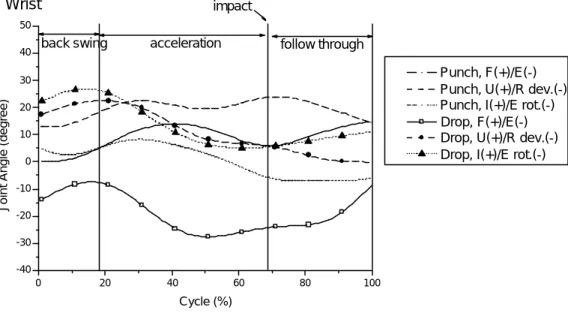
(35) (二)反拍: 由下圖看出,兩種截擊在加速中期作伸張運動 並一直持 續到跟隨期結束。. Elbow. impact. 90. back swing. 80. follow through. acceleration. 70. Punch, F(+)/E(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 60 50 40 30 20 10 0 -10 -20 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-6. 反 拍肘 關 節角運動模式. 四、 腕關節之 角運動 (一)正拍:圖 4-7所顯示的腕關節角運動 角度在整個擊球週期 皆是維持在伸張角度。點截擊在加速期中期出現伸張最大 值( 35°),在加速期後期,點截擊的腕關節會比重截擊時 來得較尺向偏移、較小的伸張角度及在擊球瞬間出現外旋 運動。. 35.
(36) Wrist. impact. follow through. 30. back swing. acceleration. 20. Punch, F(+)/E(-) Punch, U(+)/R dev.(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, U(+)/R dev.(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 10 0 -10 -20 -30 -40 -50 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-7. 正 拍腕 關 節角運動模式. (二)反拍:圖 4-8中,重截擊由後擺期就作屈曲和內旋運動至 加速初期,此時腕關節的橈向偏移運動達最大值。點截擊 由加速開始作伸張運動,並由加速期延續到跟隨期後期。. Wrist. impact. 50. back swing. 40. acceleration. follow through Punch, F(+)/E(-) Punch, U(+)/R dev.(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, U(+)/R dev.(-) Drop, I(+)/E rot.(-). Joint Angle (degree). 30 20 10 0 -10 -20 -30 -40 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-8. 反 拍腕 關 節角運動模式. 36.
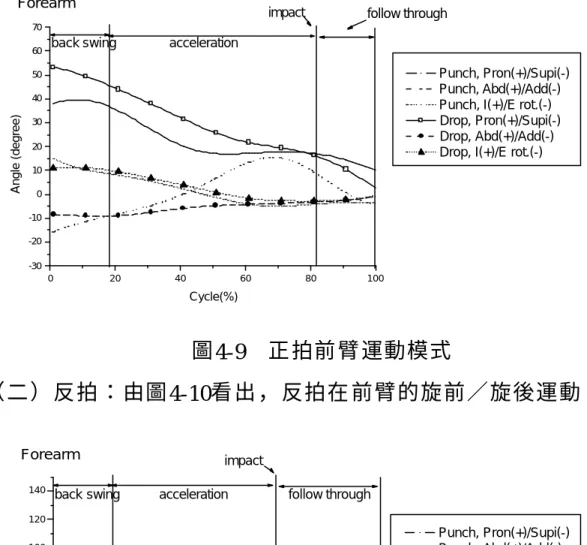
(37) 五、 前臂之運 動 (一)正拍:在前臂動作方面,兩種截擊方式皆是從旋前 40°-50° 左右開始,漸漸角度減小而於擊球瞬間為旋前約為 0°-20° 。 Forearm. impact. follow through. 70 60. back swing. acceleration Punch, Pron(+)/Supi(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, Pron(+)/Supi(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). 50. Angle (degree). 40 30 20 10 0 -10 -20 -30 0. 20. 40. 60. 80. 100. Cycle(%). 圖 4-9. 正 拍前 臂 運動模式. (二)反拍:由圖 4-10看 出 , 反拍在 前臂的旋前 Forearm 140. 旋後運動。. impact. back swing. acceleration. follow through. 120. Punch, Pron(+)/Supi(-) Punch, Abd(+)/Add(-) Punch, I(+)/E rot.(-) Drop, Pron(+)/Supi(-) Drop, Abd(+)/Add(-) Drop, I(+)/E rot.(-). Angle (degree). 100 80 60 40 20 0 -20 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-10. 反拍 前臂 運動模式. 37.
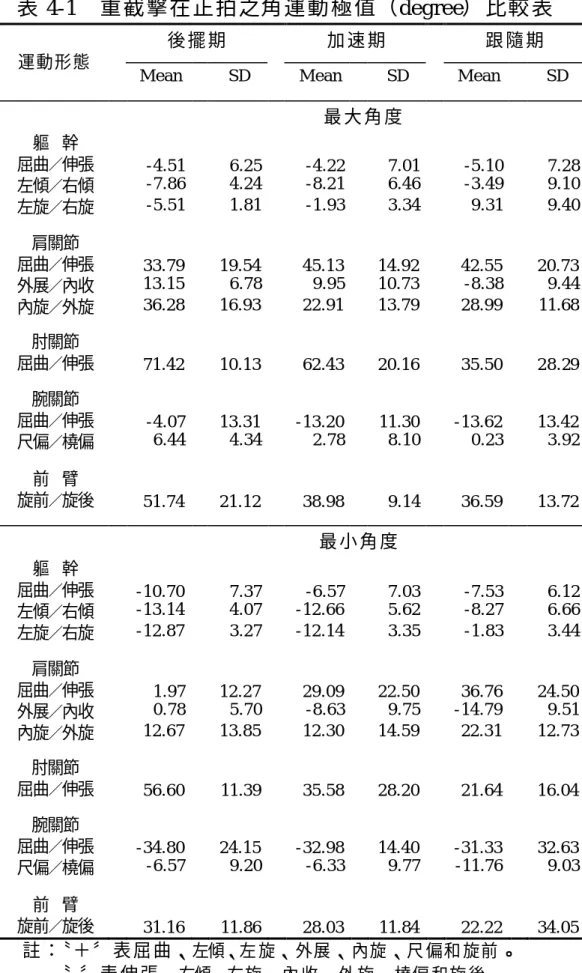
(38) 表 4-1. 重截擊在正拍之角運動極值(degree) 比較 表 後擺期. 運動形態. Mean. 加速期 SD. Mean. 跟隨期 SD. Mean. SD. 最大角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -4.51 -7.86 -5.51. 6.25 4.24 1.81. -4.22 -8.21 -1.93. 7.01 6.46 3.34. -5.10 -3.49 9.31. 7.28 9.10 9.40. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 33.79 13.15 36.28. 19.54 6.78 16.93. 45.13 9.95 22.91. 14.92 10.73 13.79. 42.55 -8.38 28.99. 20.73 9.44 11.68. 肘關節 屈曲 伸張. 71.42. 10.13. 62.43. 20.16. 35.50. 28.29. 腕關節 屈曲 伸張 尺偏 橈偏. -4.07 6.44. 13.31 4.34. -13.20 2.78. 11.30 8.10. -13.62 0.23. 13.42 3.92. 前 臂 旋前 旋後. 51.74. 21.12. 38.98. 9.14. 36.59. 13.72. 最小角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -10.70 -13.14 -12.87. 7.37 4.07 3.27. -6.57 -12.66 -12.14. 7.03 5.62 3.35. -7.53 -8.27 -1.83. 6.12 6.66 3.44. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 1.97 0.78 12.67. 12.27 5.70 13.85. 29.09 -8.63 12.30. 22.50 9.75 14.59. 36.76 -14.79 22.31. 24.50 9.51 12.73. 肘關節 屈曲 伸張. 56.60. 11.39. 35.58. 28.20. 21.64. 16.04. 腕關節 屈曲 伸張 尺偏 橈偏. -34.80 -6.57. 24.15 9.20. -32.98 -6.33. 14.40 9.77. -31.33 -11.76. 32.63 9.03. 前 臂 旋前 旋後. 31.16. 11.86 28.03 11.84 22.22 註 :〝 + 〞 表 屈 曲 、 左傾、左 旋、 外展 、 內旋 、尺 偏和 旋前 。 〝- 〞 表 伸 張 、右傾、右旋 、內 收 、外 旋、 橈偏 和旋 後。 Mean:平均數 SD: 標 準 差. 38. 34.05.
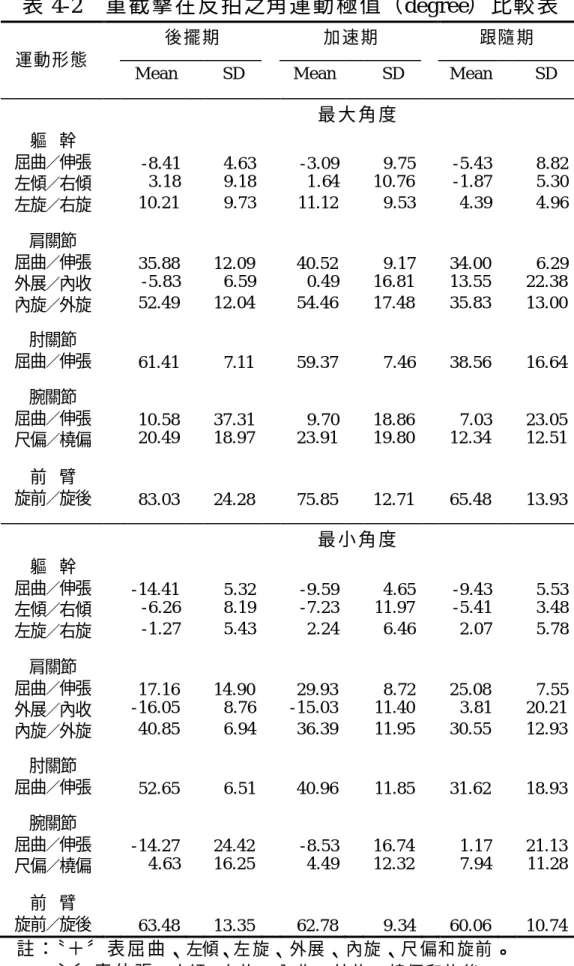
(39) 表 4-2. 重截擊在反拍之角運動極值(degree) 比較 表 後擺期. 運動形態. Mean. 加速期 SD. Mean. 跟隨 期 SD. Mean. SD. 最大角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -8.41 3.18 10.21. 4.63 9.18 9.73. -3.09 1.64 11.12. 9.75 10.76 9.53. -5.43 -1.87 4.39. 8.82 5.30 4.96. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 35.88 -5.83 52.49. 12.09 6.59 12.04. 40.52 0.49 54.46. 9.17 16.81 17.48. 34.00 13.55 35.83. 6.29 22.38 13.00. 肘關節 屈曲 伸張. 61.41. 7.11. 59.37. 7.46. 38.56. 16.64. 腕關節 屈曲 伸張 尺偏 橈偏. 10.58 20.49. 37.31 18.97. 9.70 23.91. 18.86 19.80. 7.03 12.34. 23.05 12.51. 前 臂 旋前 旋後. 83.03. 24.28. 75.85. 12.71. 65.48. 13.93. 最小角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -14.41 -6.26 -1.27. 5.32 8.19 5.43. -9.59 -7.23 2.24. 4.65 11.97 6.46. -9.43 -5.41 2.07. 5.53 3.48 5.78. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 17.16 -16.05 40.85. 14.90 8.76 6.94. 29.93 -15.03 36.39. 8.72 11.40 11.95. 25.08 3.81 30.55. 7.55 20.21 12.93. 肘關節 屈曲 伸張. 52.65. 6.51. 40.96. 11.85. 31.62. 18.93. 腕關節 屈曲 伸張 尺偏 橈偏. -14.27 4.63. 24.42 16.25. -8.53 4.49. 16.74 12.32. 1.17 7.94. 21.13 11.28. 前 臂 旋前 旋後. 63.48. 13.35 62.78 9.34 60.06 10.74 註 :〝 + 〞 表 屈 曲 、 左傾、左 旋、 外展 、 內旋 、尺 偏和 旋前 。 〝- 〞 表 伸 張 、右傾、右旋 、內 收 、外 旋、 橈偏 和旋 後。 Mean:平均數 SD: 標 準 差. 39.
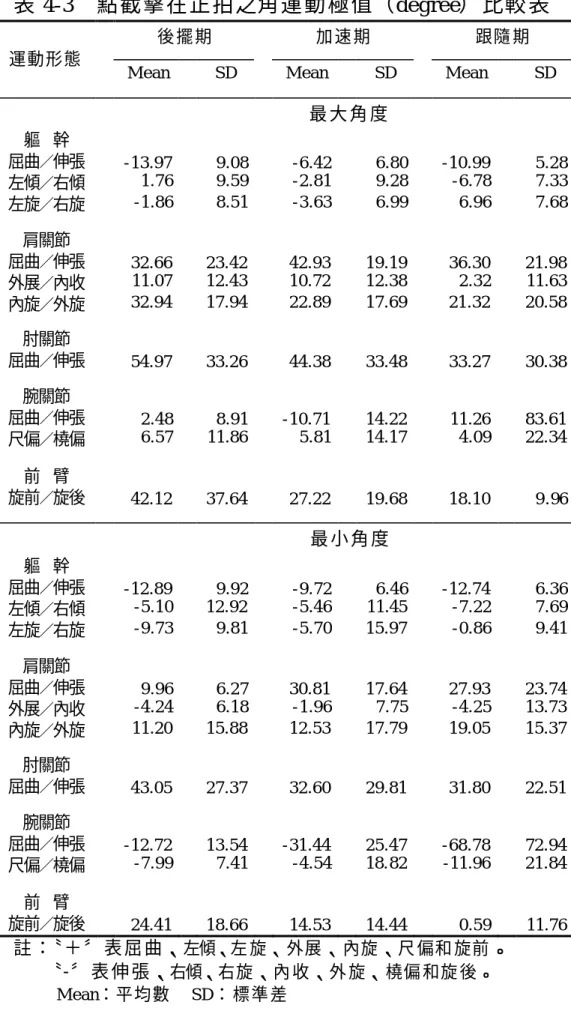
(40) 表 4-3. 點截擊在正拍之角運動極值(degree) 比較 表 後擺期. 運動形態. Mean. 加速期 SD. Mean. 跟隨 期 SD. Mean. SD. 最大角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -13.97 1.76 -1.86. 9.08 9.59 8.51. -6.42 -2.81 -3.63. 6.80 9.28 6.99. -10.99 -6.78 6.96. 5.28 7.33 7.68. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 32.66 11.07 32.94. 23.42 12.43 17.94. 42.93 10.72 22.89. 19.19 12.38 17.69. 36.30 2.32 21.32. 21.98 11.63 20.58. 肘關節 屈曲 伸張. 54.97. 33.26. 44.38. 33.48. 33.27. 30.38. 腕關節 屈曲 伸張 尺偏 橈偏. 2.48 6.57. 8.91 11.86. -10.71 5.81. 14.22 14.17. 11.26 4.09. 83.61 22.34. 前 臂 旋前 旋後. 42.12. 37.64. 27.22. 19.68. 18.10. 9.96. 最小角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -12.89 -5.10 -9.73. 9.92 12.92 9.81. -9.72 -5.46 -5.70. 6.46 11.45 15.97. -12.74 -7.22 -0.86. 6.36 7.69 9.41. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 9.96 -4.24 11.20. 6.27 6.18 15.88. 30.81 -1.96 12.53. 17.64 7.75 17.79. 27.93 -4.25 19.05. 23.74 13.73 15.37. 肘關節 屈曲 伸張. 43.05. 27.37. 32.60. 29.81. 31.80. 22.51. 腕關節 屈曲 伸張 尺偏 橈偏. -12.72 -7.99. 13.54 7.41. -31.44 -4.54. 25.47 18.82. -68.78 -11.96. 72.94 21.84. 前 臂 旋前 旋後. 24.41. 18.66 14.53 14.44 0.59 註 :〝 + 〞 表 屈 曲 、 左傾、左 旋、 外展 、 內旋 、尺 偏和 旋前 。 〝- 〞 表 伸 張 、右傾、右旋 、內 收 、外 旋、 橈偏 和旋 後。 Mean:平均數 SD: 標 準 差. 40. 11.76.
(41) 表 4-4. 點截擊在反拍之角運動極值(degree) 比較 表 後擺期. 運動形態. Mean. 加速期 SD. Mean. 跟隨 期 SD. Mean. SD. 最大角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -9.42 3.22 7.58. 7.64 7.59 6.56. -10.26 2.05 7.87. 5.87 5.37 4.65. -11.97 2.43 6.04. 3.60 5.69 4.59. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 32.75 -2.14 49.32. 18.33 7.75 10.35. 34.27 2.21 49.28. 12.02 5.84 11.86. 22.60 7.89 40.19. 13.26 16.31 9.71. 肘關節 屈曲 伸張. 60.25. 7.31. 57.47. 9.70. 48.86. 7.70. 腕關節 屈曲 伸張 尺偏 橈偏. 0.31 15.71. 18.98 5.97. -0.82 17.38. 14.56 7.03. -2.17 13.01. 21.95 7.03. 前 臂 旋前 旋後. 70.02. 7.61. 71.43. 5.35. 79.82. 10.69. 最小角度 軀 屈曲 左傾 左旋. 幹 伸張 右傾 右旋. -13.58 -4.20 -1.89. 7.02 4.25 4.61. -13.22 -1.75 2.53. 4.67 0.83 5.24. -15.28 -0.98 2.42. 2.46 4.79 4.69. 肩關節 屈曲 伸張 外展 內收 內旋 外旋. 9.20 -12.48 42.15. 12.72 6.62 7.20. 19.50 -10.05 38.86. 12.78 11.80 9.71. 9.67 0.85 30.08. 17.08 16.71 10.10. 肘關節 屈曲 伸張. 51.69. 8.59. 48.30. 7.63. 33.07. 6.92. 腕關節 屈曲 伸張 尺偏 橈偏. -14.45 3.24. 17.38 11.16. -10.94 9.80. 16.63 7.04. -11.67 3.48. 25.53 6.38. 前 臂 旋前 旋後. 55.08. 9.15 65.28 5.53 67.93 註 :〝 + 〞 表 屈 曲 、 左傾、左 旋、 外展 、 內旋 、尺 偏和 旋前 。 〝- 〞 表 伸 張 、右傾、右旋 、內 收 、外 旋、 橈偏 和旋 後。 Mean:平均數 SD: 標 準 差. 41. 7.17.
(42) 由以上結果可知,各關節之主要運動,在軀幹是左旋 旋運動、肩關節是外展 動、腕關節是屈曲 前. 內收運動、肘關節是屈曲. 伸張和尺向. 右. 伸張運. 橈向偏移運動以及前臂 是旋. 旋後運動。將上述各項結果以 t 檢 定( t-test)方法比較不. 同擊球側(見表 4-5)與不同截擊動作(見表 4-6)角運動範圍 的差異。 比較在不同擊球側重截擊與點截擊之角運動範圍(表 4-5),在後擺期與加速期各關節角運動範圍,以 t 檢 定都未達 統計上的顯著差異。 表 4-5. 不同擊球側在不同關節角運動 範圍之檢定 重截擊 t值. 軀幹 後擺期 加速期 肩關節 後擺期 加速期 肘關節 後擺期 加速期 腕關節 後擺期. 點截擊. p值. ES. t值. p值. ES. 1.070 -0.359. .310 .727. 0.62 0.21. 0.243 0.580. .814 .576. 0.15 0.35. -0.634 -0.536. .540 .603. 0.37 0.31. -0.834 -0.111. .426 .914. 0.50 0.07. -1.776 -0.854. .122 .413. 1.03 0.49. -0.850 -0.428. .417 .713. 0.51 0.26. -0.480. .641. 0.28. -0.088. .932. 0.05. -0.151 0.573. .883 .579. 0.09 0.33. -1.473 -0.260. .232 .804. 0.89 0.17. 1.604. 1.400. 0.93. -0.748. .474. 0.43. -0.134 0.476. .896 .644. 0.08 0.27. -0.304 -0.543. .768 .615. 0.18 0.36. (F/E). 加速期 後擺期 (U/D). 加速期 前臂 後擺期 加速期. 註 : ES: 處 理 效 果 ( effect size ). 42.
(43) 比較不同擊球動作在不同關節之角運動範圍(表 4-6),以 前臂(旋前. 旋後)之運動範圍在反拍加速期具有顯著差異. (p<.05)。 表 4-6. 不同截擊動作在不同關節角 運 動範圍之檢定 正拍. 軀幹 後擺期 加速期 肩關節 後擺期 加速期 肘關節 後擺期 加速期 腕關節 後擺期. 反拍. t值. p值. ES. t值. p值. ES. 0.083 -1.442. .936 .183. 0.05 0.87. -0.453 -9.480. .660 .366. 0.58 0.55. 0.492 -1.056. .644 .318. 0.32 0.64. 0.030 -0.754. .976 .468. 0.02 0.44. -0.654 -1.347. .529 .211. 0.40 0.82. -0.066 -1.829. .949 .116. 0.04 1.05. -1.617. .140. 0.98. -1.199. .258. 0.69. 0.079 0.193. .939 .851. 0.05 0.12. -1.475 -0.776. .171 .456. 0.85 0.45. 0.295. .775. 0.17. -1.917. .101. 1.11. -0.285 0.150. .782 .884. 0.61 0.09. -0.701 -2.621. .449 .026 *. 0.40 1.54. (F/E). 加速期 後擺期 (U/D). 加速期 前臂 後擺期 加速期. *p<.05 註 : ES: 處 理 效 果 ( effect size ). 43.
(44) 第二節. 關節之角速度. 本節擬就重截擊與點截擊動作週期:後擺期、加速期和跟 隨動作期,其軀幹、肩關節、肘關節與腕關節的角速度模式, 分別詳述如下: 一、 軀幹之角速度 (一)正拍:由圖 4-11可知,重截擊右旋的角速度由後擺期就 開 始 大 幅 度 增 加 , 其 最 大 值 140deg/sec 出現在擊球前,隨 後減速。屈曲角速度在加速中期達最大值,隨後減速。點 截擊在後擺期為右旋角速度,加速期開始就轉為左旋加速 直到擊球前,隨之減速。 impact. Joint velocity (degrees/sec). 150. back swing. follow through. acceleration Punch, F(+)/E(-) Punch, L(+)/R bend.(-) Punch, L(+)/R rot.(-) Drop, F(+)/E(-) Drop, L(+)/R bend.(-) Drop, L(+)/R rot.(-). 100. 50. 0. -50. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-11. 正拍 軀 幹角 速度變化 模式. (二)反拍:在圖 4-12中,重截擊的右旋角速度由後擺期一直 加速至擊球前。點截擊左旋角速度由後擺期即加速,在加 速中期達到最大值。. 44.
(45) impact. Joint velocity (degrees/sec). 150. back swing. acceleration. follow through Punch, F(+)/E(-) Punch, L(+)/R bend.(-) Punch, L(+)/R rot.(-) Drop, F(+)/E(-) Drop, L(+)/R bend.(-) Drop, L(+)/R rot.(-). 100. 50. 0. -50. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-12. 反拍 軀幹 角速度變化 模式. 兩種截擊動作在不同擊球側的軀幹旋轉角速度方面,同樣 是在擊球前達到最大值,但是重截擊大於點截擊。點截擊的左 旋. 右旋角速度最大值都在擊球前,反拍較正拍出現時間較. 早。 二、 肩關節之角速度 (一) 正拍:重截擊與點截擊的內旋角速度同樣由後擺期一直 加速直到完成擊球(見圖 4-13) ,重截擊最大的內旋角速度 在擊球前( 185deg/sec );點截擊的內旋角速度則在加速中 期達到最大值。兩種截擊動作分期的屈曲. 伸張角速度變. 化模式極為雷同,重截擊屈曲最大角速度( 260deg/sec )。 此外, 點截擊的內收角速度由後擺期一直加速直到擊球前 達到 140deg/sec 。. 45.
(46) impact 300. back swing. follow through. acceleration Punch, Abd(+)/Add(-) Punch, F(+)/E(-) Punch, I(+)/E rot.(-) Drop, Abd(+)/Add(-) Drop, F(+)/E(-) Drop, I(+)/E rot.(-). Joint velocity (degrees/sec). 200 100 0 -100 -200 -300 -400. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-13. 正拍 肩關節角 速度變化模 式. (二)反 拍:以重截擊的外旋角速度變化最為明顯(見圖 4-14) , 由後擺期一直加速至擊球前達最大值(約 255deg/sec );點 截擊則是在擊球後達最大值(約 105deg/sec )。兩種截擊的 外展角速度同樣在加速後期才出現變化,一直到跟隨期結 束。. impact 300. back swing. acceleration. follow through. Joint velocity (degrees/sec). 200. Punch, Abd(+)/Add(-) Punch, F(+)/E(-) Punch, I(+)/E rot.(-) Drop, Abd(+)/Add(-) Drop, F(+)/E(-) Drop, I(+)/E rot.(-). 100 0 -100 -200 -300 -400. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-14. 反拍 肩關節角 速度變化模 式. 46.
(47) 三、 肘關節之角速度 (一) 正拍:重截擊與點截擊的最大伸張角速度都是出現在加 速 中 期 ( 圖 4-15 ), 重 截 擊 大 約 300deg/sec , 點 截 擊 大 約 270deg/sec 。. impact. back swing 300. follow through. acceleration. Joint velocity (degrees/sec). 200. Punch, Abd(+)/Add(-) Punch, F(+)/E(-) Punch, I(+)/E rot.(-) Drop, Abd(+)/Add(-) Drop, F(+)/E(-) Drop, I(+)/E rot.(-). 100 0 -100 -200 -300 -400. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-15. 正拍 肘關節角 速度變化模 式. (二)反拍:由圖 4-16可知,重截擊的伸張角速度由後擺期一 直 加 速 至 擊 球 前 , 大 約 275deg/sec ,隨後減速。點截擊至 加速中期才出現伸張角速度,一直到跟隨期結束。肘關節 在不同擊球側的角速度,以點截擊的角速度差異性較大。. 47.
(48) impact 300. back swing. acceleration. follow through. Joint velocity (degrees/sec). 200. Punch, Abd(+)/Add(-) Punch, F(+)/E(-) Punch, I(+)/E rot.(-) Drop, Abd(+)/Add(-) Drop, F(+)/E(-) Drop, I(+)/E rot.(-). 100 0 -100 -200 -300 -400. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-16. 反拍 肘關節角 速度變化模 式. 四、 腕關節之角速度 (一)正拍:加速中期重截擊尺向偏移角速度近 100deg/sec(圖 4-17),點截擊橈向偏移與外旋角速度,分別為 125deg/sec 和 180deg/sec ,而後同樣減速。重截擊的屈曲角速度在擊 球前出現最大值是 125deg/sec 。 impact. Joint velocity (degrees/sec). acceleration. back swing. 400. follow through. Punch, F(+)/E(-) Punch, U(+)/R dev.(-) Punch, I(+)/E rot.(-) Drop, F(+)/E(-) Drop, U(+)/R dev.(-) Drop, I(+)/E rot.(-). 200. 0. -200. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-17. 正拍 腕關節角 速度變化模 式. 48.
(49) (二)反拍:由圖 4-18看出,重截擊的伸張角速度由後擺期開 始直到加速初期( 550deg/sec ),隨之轉為屈曲角速度一直 加速至擊球前。外旋角速度由動作開始加速至加速中期就 不再變化,此時尺向偏移角速度加速至擊球前,大約 250deg/sec 。. impact 800. back swing. acceleration. follow through. Joint velocity (degrees/sec). 600. Punch, F(+)/E(-) Punch, U(+)/R dev.(-) Punch, E(+)/I rot.(-) Drop, F(+)/E(-) Drop, U(+)/R dev.(-) Drop, E(+)/I rot.(-). 400 200 0 -200 -400 -600 -800. 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-18. 反拍 腕關節角 速度變化模 式. 第三節. 肢體動量之傳遞. 本節擬就重截擊與點截擊在不同擊球側的線動量(上臂、 前臂、手部和球拍)與角動量(上臂、前臂 、手 部和球拍 )結 果,分別詳述如下: 一、 線動量 (一)正 拍截擊線動量( 圖 4-19) 重截擊時,其中上臂的線動量早在加速初期就開始增加, 前臂和手由加速中期線動量才增加,在擊球瞬間到達最高線動 量 。 此 時 以 前 臂 的 線 動 量 425kg·m/sec 最 高 , 上 臂 次 之 ( 300kg·m/sec )。 點 截 擊 的 前 臂 和 手 由 後 擺 期線動量開始增加 49.
(50) 至加速中期達到最高( 300kg·m/sec 和 200kg·m/sec ),上臂則至 加速後期達最高線動量。正拍截擊線動量都是以前臂的線動量 最高。 impact back swing. follow through. acceleration. Linear momentum (Kgm/sec). Punch, upper arm. (??4-5) Punch, forearm. 400. Punch, hand Drop, upper arm Drop, forearm Drop, hand Punch, racket Drop, racket. 200. 0 0. 10. 20. 30. 40. 50. 60. 70. 80. 90. 100. Cycle (%). 圖 4-19. 正拍截擊線動量. (二)反拍截擊線動量( 圖 4-20) 重截擊由後擺期開始,各肢段動量就減小並延續至加速中 期開始增加,並且都在擊球瞬間達最大線動量,分別是前臂達 到 400kg·m/sec、手部達到 255kg·m/sec 以 及上 臂 是 200kg·m/sec , 隨即減小。點截擊由後擺期就一直增加至擊球前 就減小。反拍 截擊線動量的最高線動量,重截擊是在擊球瞬間,點截擊則在 擊球前。. 50.
(51) impact. Linear momentum (Kgm/sec). back swing. acceleration. follow through Punch, upper arm Punch, forearm Punch, hand Drop, upper arm Drop, forearm Drop, hand Punch, racket Drop, racket. 400. 200. 0 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-20. 反拍截擊線動量. 重截擊的最高線動量都是在擊球瞬間,點截擊的最高線動 量發生時間,正拍(加速中期)較反拍(擊球前)為早。 二、 角動量 (一)正拍截擊角動量( 圖 4-21) 在正拍截擊之角動量,兩種截擊動作的動量變化極類似。 上臂與前臂開始都先減小,進入加速期主要是上臂動量在增 加,未到加速中期隨即減小。重截擊的前臂角動量此時正在增 加,在擊球前保持固定的動量完成擊球,此時,球拍 動量在擊 球前一直增加至完成擊球( 0.19kg·m2 ·rad/sec )。點截擊的上臂 動量在擊球前增加,手部動量在擊球瞬間達最大值,球拍的動 量幾近固定。. 51.
(52) impact. Angular momentum (kg-m2-rad/sec). 0.20. back swing. follow through. acceleration. 0.18. Punch, upperarm Punch, forearm Punch, hand Drop, upperarm Drop, forearm Drop, hand Punch, racket Drop, racket. 0.16 0.14 0.12 0.10 0.08 0.06 0.04 0.02 0.00 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-21. 正拍截擊角動量. (二)反拍截擊角動量(圖 4-22) 重截擊的上臂與前臂由後擺期角動量漸減, 前臂 在加速中 期 迅 速 增 加 角 動 量 , 直 到 擊 球 瞬 間 達 最 大 值 ( 0.08kg·m2 ·rad/sec ), 隨後再度減速至跟隨動作期結束;上臂 則在加速中期之後增加角動量,並一直跟隨動作期結束,球拍 角動量由加速中期增加至擊球 瞬間 ( 0.19kg·m2 ·rad/sec )。 點截擊與重截擊之角動量變化正好相反,上臂與前臂由後 擺期一直增加至加速期,而後角動量減小。前臂在擊球前增 加,上臂角動量減少至擊球瞬間再增加,球拍則漸增至加速中 期,而後減速至完成擊球再增加。. 52.
(53) impact 0.22. back swing. Angular momentum (kg-m2 -rad/sec). 0.20. acceleration. follow through. 0.18. Punch, upperarm Punch, forearm Punch, hand Drop, upperarm Drop, forearm Drop, hand Punch, racket Drop, racket. 0.16 0.14 0.12 0.10 0.08 0.06 0.04 0.02 0.00 -0.02 0. 20. 40. 60. 80. 100. Cycle (%). 圖 4-22. 反拍截擊角動量. 第四節. 綜合討論. 本節乃是根據以上的研究結果,作進一步的討論。 一、 不同擊球側上肢各關節與軀幹之運動學 網球截擊動作的特徵,是在近距離、短時間內的表現。宥 於 解 剖 構 造 上 , 使 得 正 拍 與 反 拍 在 使 用 的 習慣 上 就 已 有 所 不 同。根據研究所得,截擊時軀幹之運動,重截擊在不同擊球側 的右旋. 左旋、前傾和左傾運動,都在加速中期轉為左旋. 旋、後仰和右傾運動,反拍的右傾. 右. 前傾運動模式較小;點截. 擊由開始的旋轉模式一直持續到完成擊球。軀幹的角運動在不 同擊球側的重截擊與點截擊都具有相同的運動模式,差異性並 不大,重截擊較點截擊有較大的動作範圍(見表 4-1至 4-4)。軀 幹的角速度在不同擊球側,重截擊右旋角速度在擊球前達 140deg/sec ;點截擊的左旋. 右旋角速度最大值都在擊球前,. 反拍較正拍提前。處理反拍來球,能以軀幹的旋轉運動帶動持 拍臂,應有效化解上臂肱三頭肌、後中三角肌因過度拉長所造 53.
(54) 成的運動傷害。面對近距離來球,常常在倉促間行使動作而無 法達成這項動作模式,就有賴於平時加強肌力訓練。 肩關節在持拍運動的角色是上肢帶動球拍揮擊的軸 ( Elliott, 1982)。重截擊與點截擊在不同擊球側都有相似的運 動模式,正拍由加速中期開始作內收、屈曲與內旋運動;在反 拍同樣由加速中期作外展、伸張與外旋,重截擊動作幅度稍大。 肘關節屬單一自由度的關節,主要的動作為屈曲及伸張 ( Hay & Reid , 1988; Hole & Koos, 1991)。肘關節在正拍截 擊時,較少屈曲運動與 Van Gheluwe 和 Hebbelinch( 1986) 以 肌電訊號量測上肢部位的肌群的研究所得相同, 在正拍截擊時 的加速階段除了肱二頭肌和肱橈肌之外,其他的肌肉都顯示出 非常強的活性,亦即正拍截擊時較少肘關節屈曲動作,手臂擺 動自然有限。 肘關節運動角度反拍較正拍小,重截擊的伸張角 速度是正拍大於反拍,最大伸張角速度正拍(加速中期)提前 於反拍(擊球前)。 腕關節為維持拍面的穩定性,在整個擊球週期皆維持在伸 張的角度,以點截擊最明顯。腕關節角 速度在正反拍的差異, 在於點截擊的角速度變化在正拍的模式較反 拍明顯,重截擊則 正好相反。 上肢各關節與軀幹在不同擊球側的角運動與角速度模式 都顯示出,重截擊都比點截擊有較大的運動角度與角速度。但 是以 t 檢 定都未達統計上的差異(表 4-5), 因實驗參與者的截 擊動作無法趨於一致性,個別差異無法以平均數檢驗。 二、 比較重擊式與點擊式截擊動作之差異 重擊式與點擊式截擊動作之差異,最主要在於後擺後期與. 54.
(55) 加速期。 重截擊時,軀幹之運動在後擺期與加速期都有較大的 左旋. 右旋運動,重截擊藉軀幹的先右旋再左旋動作,使得上. 半身具有長時間的活動, 可增加軀幹在重截擊時之旋轉力矩。 重 截 擊 在 正 拍 的 肩 關 節 內 旋 角 速 度 ( 185deg/sec)與反拍 的外旋角速度( 255deg/sec) 、肘關節的伸張角速度( 275deg/sec) 以 及 腕 關 節 的 尺 向 偏 移 角 速 度 ( 250deg/sec)都是在擊球前達 到最大值。在以往有關網球其他擊球技術的研究中 ( Elliott 等 人 , 1989; Wang、 Lo 、 Wu & Su 等 人 , 1998; Kundson & Bahamonde,2001),對於在擊球前各關節出現最大值隨即減速 擊球的現象,認為是在避免擊球瞬間加速過大,腕部伸張太快 而造成網球肘。由此可知,重截擊動作在反拍面臨運動傷害的 發生與其他擊 球技術是相同的。點截擊反拍的肩關節外旋角速 度最大值則出現在擊球後( 105deg/sec ),以及肘關節的伸張角 運動,點截擊在跟隨動作期呈屈曲運動較有利於力量的吸收。 不同截擊動作在不同關節之運動範圍(表 4-6),以前臂(旋前 旋後)運動範圍在反拍加速期具有顯著差異(p<.05), 此現 象可能與能量吸收有關。Tomas 、Salazar 和 Lander( 1991) 指出 處理效果 比 0.2 小者為小處理效果、處理效果在 0.5 左右 者為中度處理效果、處理效果 比 0.8 大者屬於高處理效果。雖 然,腕關節(尺向. 橈向偏移)( ES=1.11)和肘關節(屈曲. 伸張)( ES=1.05) 之運動範圍在反拍加速期沒有顯著的差異, 可是自處理效果看來研究若增加實驗參與者人數,則可達到顯 著的不同。點截擊時腕關節在加速後期的屈曲、尺向偏移及內 旋運動為減緩球速,可產生球過網後即落地之效果。 本 研 究 之 上 述 結 果 合 理 的 顯 示 出 , 當 重 截 擊 時 軀幹及肩. 55.
(56) 關節會產生較大運動範圍,如此,可產生較多動能而在腕關節 的運動較少,其主要功能為維持腕關節穩定並將球之動能反彈 回去。相反地,在點截擊時,腕關節會有較大的運動角度,其 主要目的是用來吸收球之動能使大部分能量藉由腕關節來吸 收並 控制球之反射方向。同理, 反拍截擊在重截擊及點截擊中 亦有類似的情形發生。 三、 重擊式與點擊式截擊動作的效果 根據圖 4-19和 圖 4-20得悉,重截擊動作在加速期前小幅度 後拉拍,長時間的上半身活動,在擊球前加快拍頭的速度,球 拍線動量在此時達到最高值( 200kg·m/sec ) ,由 圖 4-22得知,反 拍重截擊的前臂角動量較上肢其他肢段動量為高,以此加速帶 動球拍擊球,球拍動量在擊球瞬間達到 0.19kg·m2 ·rad/sec。正拍 重 截 擊 ( 圖 4-21 ) 的 球 拍 角 動 量 增 加 至 完 成 擊 球 同 樣 達 到 0.19kg·m2 ·rad/sec。重 截 擊在不同擊球側的球速並沒有顯著的差 異。點截擊不強調後拉拍動作,為使球過網後就著地,球拍與 球短暫的接觸,擊球瞬間更須放慢拍頭的速度。其球拍動量變 化較重截擊為小,肢段線動量最大值正拍是在加速中期,反拍 則在擊球前, 兩種截擊的線動量都是以前臂的線動量最高,表 示截擊動作主要動量是由前臂而來。 正拍點截擊的手部動量在擊球瞬間達最大值(圖 4-21) ,反 拍點截擊為使 球過網後急速下墜並造成低反彈點,球拍由加速 中期就減速至完成擊球再增加,兩種截擊在手部的角動量都趨 於固定,在整個擊球過程中,尤其在反拍截擊,這樣的表現可 減輕過於活躍的橈側伸腕肌的負擔。. 56.
(57) 由圖 4-21可知,兩種截擊在正拍的角動量變化極類似,加 速初期上臂先增加,到了中期轉由前臂增加,此後重截擊的前 臂力量保持固定的動量完成擊球,圖 4-22中,反拍的重截擊在 擊球前的角動量都繼續增加。點截擊的前臂在擊球前都減少, 即持拍運動項目,為了改變球體的動量與最後的速度在即將完 成擊球時,必須延長球拍與球接觸的時間。. 57.
(58) 第伍章. 結論與建議. 第一節. 結論. 本 研 究 以 六 名男 性 的 全 能 型 網 球 選 手 為 本 研 究 之 實 驗 參 與者,探討重擊式與點擊式截擊在不同擊球側時,上肢各關節 與軀幹之運動學與動量參數的差異。各項實驗所得資料,經統 計、分析與討論之後,獲 得以下結論: 一、 角運動方面 加速期軀幹將來自下肢的力量以右旋動作轉移到上肢成 為截擊動力的來源,並且以相對於骨盆的左傾動作加大向前揮 拍的距離。軀幹的角運動在不同擊球側的重截擊與點截擊都具 有相同的運動模式,差異性並不大。在加速中期,肩開始作伸 張. 屈曲、外展. 內收與內旋. 外旋運動; 肘關節較少屈曲動. 作,手臂動作自然有限以及 前臂的旋前與旋後運動,以反 拍截 擊最為明顯 (p<.05)。 腕關節為維持拍面的穩定性,在整個擊 球週期皆維持在伸張的角度。 上 肢 與 軀 幹 在 不 同 擊 球 側 的 角 運 動 與角 速 度 模 式 都 顯 示 出,重截擊都比點截擊有較大的角運動模式。個人技術水準和 調整的結果將影響兩種截擊動作模式。 二、 角速度方面 加速期開始,截擊的 軀 幹右旋角速度最大值都出現在擊球 前(重截擊達 140deg/sec);肩關節內旋角速度( 185deg/sec) 與 反 拍 的 外 旋 角 速 度 ( 255deg/sec )、 肘 關 節 的 伸 張 角 速 度 ( 275deg/sec)以及腕關節的尺向偏移角速度( 250deg/sec )都 是在擊球前達到最大值。避免擊球瞬間加速過大,腕部伸張太 快而造成網球肘。重截擊比點截擊有較大幅 度 的角速度。 58.
(59) 三、 肢體動量之傳遞 兩種截擊的線動量都是以前臂的線動量最高,表示截擊動 作主要動量是由前臂而來。在上肢肢段的角動量,以正拍點截 擊動作的手部主要在擊球瞬間加速,為了改變球體的動量與最 後的速度,在此必須延長球拍與球接觸的時間,增加揮拍力量 的衝量。 重截擊時軀幹及肩關節會產生較大運動範圍,如此,可產 生較多動能,而在腕關節的運動較少,其主要功能為維持腕關 節穩定並將球之動能反彈回去。腕關節會有較大的運動角度, 主要是吸收球之動能使大部分能量藉由腕關節來吸收並控制 球之反射方向。前臂和腕關節對截擊球的控制具有重要的功 能。. 59.
(60) 第二節. 建議. 針對本研究之實施,提出以下建議事項 : 一、本研究中運用三維 上肢運動分析模式,可加以運用在其他 上肢運動分析上,提供教練在量化分析上肢運動模式的參 考。 二、本研究僅分析我國優秀網球選手的截擊動作,可再檢視高 級、中級以及初學者之間的生物力學差異,對於修正動作 技術可提供更具體的方向。 三、 本研究或因實驗參與者的非一致性,無法以平均數檢驗, 建議往後研究應注意個別因素 。 四、建立我國網球運動技術分級的常模,對於實驗參與者的資 料收集方式將有所依據。. 60.
數據



+7
Outline
相關文件
• 在確定了桿件的軸力後,還是不能立即判 斷桿在外力作用下是否會因強度不足而破
WILLIAM HEARD KILPATRICK
3.張貼本節課教學重點海報,提示學
3.欄位不敷使用時,請自行延伸接續,並請以 A4 格式紙張、標楷體 14 號字體繕打。本 表資料除紙本 1 份外,並請繳交 WORD
監察委員葉大華於 12 日公布申請立案調查國中借課問題。葉大華表示,教育部於 2010 年組 成「教學正常化防治小組」,並於
各位小文豪們,歡迎你將自己寫的「心得分享區」答案拍照或打成 Word 檔寄到徵稿信箱,也可以直接掃描下方的 QR Code 圖檔,連結至
美國國家航空暨太空總署(NASA)首度公開將太空人送上月球的阿提米絲計畫時 間表,由計劃表可看見 NASA 計畫於 2024
(一) 所有必修部分和延伸部分的課節都納入時間表內,所有班級的數學課節畫 一為七堂,全班修讀相同的課題內容(見圖
