國立交通大學
機械工程學系
碩士論文
順滑模態觀測速度控制應用於無轉速感測之直驅式
可變速風力發電機
Sliding Mode Observer for Sensorless Control of
Direct-driven Variable Speed Wind Generator
研 究 生:曾炫錡
指導教授:鄭泗東 博士
順滑模態觀測速度控制應用於無轉速感測之直驅式可變速風力發
電機
Sliding Mode Observer for Sensorless Control of Direct-driven
Variable Speed Wind Generator
研 究 生:曾炫錡 Student:Hsuan-Chi Tseng
指導教授:鄭泗東 Advisor:Stone Cheng
國 立 交 通 大 學
機械工程學系
碩 士 論 文
A ThesisSubmitted to Department of Mechanical Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
Mechanical Engineering
2012
Hsinchu, Taiwan, Republic of China
順滑模態觀測速度控制應用於無轉速感測之直驅式可變速
風力發電機
研究生: 曾炫錡 指導教授:鄭泗東博士
摘要
風力發電系統中可變速型發電機比定速型可獲取較多風能,其特色為發 電機的轉速需要控制以隨風速變化。大型風力發電機與小型風力發電機比較起來 造價高昂且需要維護,因此大型風力發電機轉速控制常安裝轉速感測器偵測發電 機轉速與轉子位置。然而對於小型風力發電機而言其成本受市場效益因素而受限 且必需保證長時間免維護,因此常採用無轉速感測轉速控制策略取代安裝轉速感 測器所帶來的成本與可靠度問題。本文以順滑模態觀測器估測發電機轉速與轉子 位置,其優點為對發電機參數變化敏感度低具強健性,此外運算程序簡易,可由 數位訊號處理器或微處理器實現其控制法則。本研究使用永磁同步發電機搭配實 作的周邊迴授電路、驅動電路與控制器軟硬體實現順滑模態觀測器於永磁同步發 電機的轉速估測與控制,從模擬與實驗上探討順滑模態觀測器應用在風力發電系 統無轉速感測轉速控制的可行性與強健性,最後搭配實驗數據與市面上風力發電 機規格分析其應用範圍。 關鍵詞: 順滑模態觀測器、無轉速感測轉速控制、風力發電、永磁同步發電機Sliding Mode Observer for Sensorless Control of
Direct-driven Variable Speed Wind Generator
Student :
Hsuan-Chi TsengAdvisor : Dr. Stone Cheng
Abstract
Variable speed wind turbines can obtain more wind energy than fixed speed
wind turbines in wind energy conversion system (WECS). To obtain maximum power
from wind, variable speed wind turbines need be controlled by rotor speed controller
as wind speed varied. Compare with large scale variable wind turbines with small
scale variable wind turbines, the former are expensive and need maintenance,
therefore, they usually install rotor speed sensor for speed control application.
However, the latter are restricted to low cost due to market consideration and
guarantee maintenance free for long time. Therefore, they preferred to adopt
sensorless control strategy. In this thesis, rotor position and speed estimation is
established via sliding mode observer (SMO). It is good at its robustness against
parameter variation and it can be implemented in microprocessors or digital signal
processors (DSP). Permanent magnet synchronous generator (PMSG) with peripheral
circuits, gate driver and DSP are used for PMSG sensorless speed controller
implementation in this thesis. Feasibility of SMO in WECS application is discussed
by simulation and experimental results. Finally, Applicable range of SMO is analyzed
by experimental data and wind turbine specification from market.
誌謝
本文能夠完成除了感謝指導教授鄭泗東博士無時不刻的指導外,還要感謝實 驗室學長權峰、敏瑞、志鴻、俊宏、志豪、國維、冠豪與靖哲的幫忙解決我學業 或研究上的疑惑,感謝伯謙學長指點我口頭與書面報告上的一些要領,感謝育丞 學長陪我跑步鍛鍊我的身心使我能夠在研究上有更高的專注力。而奇穎、家宏、 咨宏、以成與岳桓也要感謝您們對我在研究方面上所提出的一些建議使我看出自 己的盲點所在,金大仁老師實驗室的奕豪與振瑋也感謝您們願意花時間與我討論 研究理論上的問題,而士傑、仲翔、珺竹、歆苹等學弟妹們也感謝您們陪我度過 在實驗室最後一年的時光,而在背後支持我的家人雖然不太清楚我所研究的事 物,卻仍然給予我適當的關懷令我相當感動,此外也非常感激朋友們對我的關心 與照顧,身為研究生的這段時光即將要結束了,相信這些年是我難以忘懷的回憶。目錄
摘要... i Abstract ... ii 誌謝... iii 目錄... iv 圖目錄... vi 表目錄... x 第一章 緒論... 1 1-1 引言 ... 1 1-2 文獻回顧 ... 2 1-3 研究動機 ... 3 1-4 論文大綱 ... 5 第二章 風力發電系統架構... 6 2-1 風力發電系統 ... 6 2-2 風力發電原理 ... 11 2-3 座標轉換 ... 13 2-4 永磁同步發電機 ... 15 第三章 永磁同步發電機無轉速感測轉速控制理論... 19 3-1 順滑模態控制理論 ... 19 3-2 順滑模態觀測器 ... 23 3-3 永磁同步發電機向量控制理論 ... 27 3-4 永磁同步發電機轉速估測與控制模擬結果 ... 28 第四章 順滑模態觀測器週邊電路與控制器軟硬體介面... 28 4-1 永磁同步發電機線電壓與相電流迴授電路 ... 36 4-2 智慧功率模組 ... 39 4-3 智慧功率模組驅動電路與緩衝電路 ... 40 4-4 光學編碼器介面電路 ... 43 4-5 周邊電路硬體與配置 ... 45 4-6 數位訊號處理器 TMS320 F2812 與程式編輯軟體介面 ... 48 第五章 實驗帄台與實驗結果... 53 5-1 永磁同步風力發電機實驗帄台 ... 53 5-2 實驗量測參考點選擇方法 ... 54 5-3 永磁同步發電機直交軸電感量測實驗 ... 56 5-4 永磁同步發電機電壓與電流回授實驗 ... 57 5-5 智慧功率模組三相整流器與變流器實驗 ... 60 5-6 永磁同步發電機轉速估測與控制程式流程 ... 655-7 永磁同步發電機轉速估測與無轉速感測轉速控制實驗 ... 67 5-8 順滑模態觀測器於風力發電機應用範圍分析 ... 82 第六章 結論與未來展望... 85 6-1 結論 ... 85 6-2 未來展望 ... 85 第七章 參考文獻... 86
圖目錄
圖 1-1 風力發電機無轉速感測轉速控制架構 ... 5 圖 2-1 水帄軸式風力發電機 ... 6 圖 2-2 垂直軸式風力發電機 ... 6 圖 2-3 傳動式大型風力發電機 ... 7 圖 2-4 傳動式大型風力發電機齒輪箱 ... 7 圖 2-5 直驅式大型風力發電機 ... 8 圖 2-6 400W 風力發電機 ... 9 圖 2-7 5kW 風力發電機 ... 9 圖 2-8 獨立型風力發電系統 ... 10 圖 2-9 小型風力發電系統控制器 ... 10 圖 2-10 小型風力發電系統剎車裝置 ... 11 圖 2-11 風能轉換效率係數曲線 ... 12 圖 2-12 2kW 風力發電機功率曲線 ... 12 圖 2-13 2.5MW 風力發電機功率曲線 ... 13 圖 2-14 三相定子座標向量空間 ... 13 圖 2-15 兩相靜止座標與同步旋轉座標 ... 14 圖 2-16 400W 永磁同步發電機結構 ... 16 圖 2-17 永磁同步發電機三相等效電路 ... 17 圖 2-18 三相靜止與同步旋轉座標上的永磁同步發電機 ... 17 圖 3-1 符號函數 ... 19 圖 3-2 迫近模態與順滑模態 ... 20 圖 3-3 實際上的順滑模態產生 ... 20 圖 3-4 飽和函數 ... 21 圖 3-5 順滑條件 ... 22 圖 3-6 順滑模態轉速觀測器結構圖 ... 26 圖 3-7 直軸電流迴路方塊圖 ... 27 圖 3-8 交軸電流迴路方塊圖 ... 28 圖 3-9 速度迴路方塊圖 ... 28 圖 3-10 隨時間變動的風場 ... 29 圖 3-11 隨風場變動的發電機轉速 ... 29 圖 3-12 轉速估測圖 ... 30 圖 3-13 轉速估測誤差圖 ... 30 圖 3-14 真實轉子位置 ... 30 圖 3-15 估測轉子位置 ... 31 圖 3-16 iα真實值 ... 31圖 3-17 iα估測值 ... 31 圖 3-18 iα估測誤差 ... 32 圖 3-19 發電機 400rpm 時的 eα ... 32 圖 3-20 K=5 時 400rpm 轉速估測結果 ... 32 圖 3-21 具轉速感測的轉速響應(命令為 250rpm) ... 33 圖 3-22 無轉速感測的轉速響應(命令為 250rpm) ... 33 圖 3-23 具轉速感測的直軸電流響應 ... 34 圖 3-24 無轉速感測的直軸電流響應 ... 34 圖 3-25 具轉速感測的交軸電流響應 ... 34 圖 3-26 無轉速感測的交軸電流響應 ... 35 圖 3-27 變動命令下具轉速感測的轉速響應圖 ... 35 圖 3-28 變動命令下無轉速感測的轉速響應圖 ... 35 圖 4-1 永磁同步發電機線電壓迴授電路 ... 37 圖 4-2 永磁同步發電機線電壓迴授數位化過程 ... 37 圖 4-3 永磁同步發電機相電流迴授電路 ... 37 圖 4-4 LA 55-P 電流感測器 ... 38 圖 4-5 永磁同步發電相電流迴授數位化過程 ... 38 圖 4-6 類比輸出電壓與待測電流關係 ... 38 圖 4-7 智慧功率模組內部結構 ... 39 圖 4-8 7MBP75RA060 功率模組實體結構 ... 39 圖 4-9 交流-直流雙輸出變壓器 ... 41 圖 4-10 光耦合器驅動電路 ... 41 圖 4-11 IGBT 與 RCD 緩衝電路 ... 42 圖 4-12 RCD 緩衝電路原理 ... 42 圖 4-13 光學編碼器介面電路 ... 44 圖 4-14 光學編碼器還原後的 A 相與 B 相方波 ... 44 圖 4-15 光學編碼器 Z 相脈衝輸出 ... 44 圖 4-16 周邊電路硬體 ... 45 圖 4-17 正負 15V 電源供應電路 ... 45 圖 4-18 焊線式變壓器 ... 46 圖 4-19 驅動電路與智慧功率模組間的配置 ... 46 圖 4-20 整體電路硬體配置圖 ... 47 圖 4-21 光學編碼器介面電路 ... 47 圖 4-22 F2812 eZdsp 開發板 ... 48 圖 4-23 F2812 內部功能結構圖 ... 50 圖 4-24 F2812 記憶體配置圖 ... 51 圖 4-25 F2812 eZdsp 外部記憶體 ... 51 圖 4-26 CCS 3.3 軟體介面 ... 52
圖 5-1 永磁同步風力發電機實驗帄台 ... 53 圖 5-2 轉軸扭力值與發電機轉速值 ... 53 圖 5-3 電性參數量測點示意圖 ... 55 圖 5-4 線電壓負半周被截掉的情形 ... 55 圖 5-5 轉子轉動時線電感最小值 ... 57 圖 5-6 轉子轉動時線電感最大值 ... 57 圖 5-7 線電壓量測結果 ... 58 圖 5-8 線電壓 ADC 結果 ... 58 圖 5-9 相電壓轉換結果 ... 59 圖 5-10 A 相電流量測結果 ... 59 圖 5-11 A 相電壓與電流轉換結果 ... 60 圖 5-12 智慧功率模組三相整流實驗架構 ... 60 圖 5-13 直流端電阻 1kΩ 時線電壓 ... 61 圖 5-14 直流端電阻 8Ω 時線電壓 ... 61 圖 5-15 直流端電阻 1kΩ 時直流端電壓 ... 61 圖 5-16 智慧功率模組三相變流實驗架構 ... 62 圖 5-17 未加入緩衝電路之線電壓 ... 62 圖 5-18 未加入緩衝電路之相電壓 ... 63 圖 5-19 加入緩衝電路之線電壓 ... 63 圖 5-20 加入緩衝電路之相電壓 ... 63 圖 5-21 濾波後的線電壓 ... 64 圖 5-22 濾波後的相電壓 ... 64 圖 5-23 永磁同步發電機轉速估測程式流程 ... 65 圖 5-24 永磁同步發電機無轉速感測轉速控制程式流程 ... 66 圖 5-25 永磁同步發電機轉速估測與控制實驗架構 ... 67 圖 5-26 永磁同步發電機轉速估測與控制實驗硬體架構 ... 67 圖 5-27 100rpm 時的轉速估測結果 ... 68 圖 5-28 200rpm 時的轉速估測結果 ... 68 圖 5-29 300rpm 時的轉速估測結果 ... 68 圖 5-30 500rpm 時的轉速估測結果 ... 69 圖 5-31 500rpm 時的轉速估測結果 ... 69 圖 5-32 300rpm 時 iα估測值與量測值 ... 69 圖 5-33 300rpm 時 iα估測誤差 ... 70 圖 5-34 300rpm 時 iβ估測值與量測值 ... 70 圖 5-35 300rpm 時 iβ估測誤差 ... 70 圖 5-36 任意調整轉速時的真實轉速與估測轉速 ... 71 圖 5-37 規律調整轉速時的真實轉速與估測轉速(一)... 72 圖 5-38 規律調整轉速時的真實轉速與估測轉速(二)... 72
圖 5-39 符號函數下的轉速估測結果 ... 73 圖 5-40 飽和函數下的轉速估測結果 ... 73 圖 5-41 發電機轉速 400rpm 時的 eα ... 73 圖 5-42 K=5 時 400rpm 轉速估測結果 ... 74 圖 5-43 未補償角度時之真實與估測轉子位置 ... 75 圖 5-44 加入補償角度時之真實與估測轉子位置 ... 75 圖 5-45 轉速隨時間變動時真實與估測轉子位置 ... 75 圖 5-46 定子電阻值上升 20% ... 76 圖 5-47 定子電阻值上升 20%時對應的任意轉速 ... 76 圖 5-48 定子電阻值減少 20% ... 77 圖 5-49 定子電阻值減少 20%時對應的任意轉速 ... 77 圖 5-50 定子電阻值上升至 5Ω ... 77 圖 5-51 定子電阻上升至 5Ω 時對應的任意轉速 ... 77 圖 5-52 定子電阻值減少為 1Ω ... 78 圖 5-53 定子電阻值減少為 1Ω 時對應的任意轉速 ... 78 圖 5-54 濾波前後的線電壓 ... 78 圖 5-55 300rpm 命令下的轉速響應 ... 79 圖 5-56 300rpm 命令下的直軸電流響應 ... 80 圖 5-57 300rpm 命令下具轉速感測控制的交軸電流響應 ... 80 圖 5-58 300rpm 命令下無轉速感測控制的交軸電流響應 ... 81 圖 5-59 300rpm 命令下交軸電流命令響應 ... 81 圖 5-60 250rpm 命令下的轉速響應 ... 82 圖 5-61 變動命令下的轉速響應 ... 82 圖 5-62 直流電壓 12V 時的波形(轉速 362rpm) ... 84 圖 5-63 直流電壓 24V 時的波形(轉速 694rpm) ... 84 圖 5-64 直流電壓 48V 時的波形(轉速 1419rpm) ... 84
表目錄
表 2-1 併網功率範圍定義 ... 8 表 3-1 發電機模擬參數 ... 28 表 4-1 富士 7MBP75RA060 規格 ... 40 表 4-2 編碼器輸出腳位說明 ... 43 表 5-1 發電機參數 ... 54 表 5-2 LCR meter 測試方式 ... 56 表 5-3 讀數值與 QEP 計算值比較 ... 71 表 5-4 不同轉速範圍下的補償角度 ... 74 表 5-5 不同轉速範圍時的估測結果 ... 82 表 5-6 各種類型風力發電機的有功轉速範圍 ... 83第一章
緒論
1-1 引言
根據國際能源總署(International Energy Agency;IEA)的研究報告,地球上的
煤碳、天然氣與石油各約剩下二百年、五十年與三十年的存量供給人類使用。為 了避免上述的非再生能源消耗過度,尋找可替代性的能源是非常重要且急迫的, 近幾年來關於像是太陽能、風能、地熱能與海洋能等再生能源的使用量大增,其 原因是它們是永續的且永遠不會被消耗殆盡,風能為上述所提到的再生能源的其 中之一,其成因為地球上不均勻的溫度分布造成氣壓差,愈大的氣壓差將造成更 大的風力,風力發電系統是一種能將風的動能轉換成機械能然後再由發電機轉換 成電力的一種架構。丹麥於 1890 年推動世界上第一個風力發電計畫,而具螺旋 槳式葉片的風力發電機於 1931 年出現在蘇聯,在這之後風力發電機的建造於各 國開始風行,直至今日研究數據上顯示世界上大約有二百兆瓦的風能可利用其能 夠提供全球 8%至 9%的電力。 以台灣身為一個海島國家而言,其具有優良的風場位置因為東北季風與西南 季風提供了充沛的風源,一些研究報告顯示出台灣陸地上占約兩千帄方公里的帄 地地形其風速帄均約為五至六米每秒潛在風能約一億瓦,而海洋上的潛在風能則 為陸上的兩倍,陸地與海洋加起來總共三億瓦的風能將可帶來一千五百億台幣的 經濟效益。尤其像台灣這種高度依賴煤碳的國家(約佔 40%的總能源)更應在為了 減少溫室氣體的排放的目的下發展及使用乾淨的再生能源。 目前的風力發電系統依照風力發電機轉速可分成定速恒頻與變速恆頻兩 種,所謂的恆頻指的就是在風力發電電網端擁有頻率固定的交流電力輸出以與其 它電力來源併網才能夠穩定的供給用戶使用,定速恒頻風力發電機的轉速可由葉 片的可變螺距控制(Pitch Control)而維持一定的轉速而維持電網端定頻,然而這種 形式的發電系統無法捕捉到最大的風能故其效率較低,為了獲得較高的效率變速
恒頻的風力發電系統近年來成為各家風力發電廠商發展的目標,它能夠變動發電 機的轉速使其運轉在最佳值以捕捉較多風能,然而與定速恒頻風力發電系統比較 起來其電力系統端需要加入閉迴路電流控制以達到變動發電機轉速的目的而增 加系統的複雜性,不過在某些風能來源不甚穩定的區域而言發展此種形式的風力 發電系統將是勢在必行的。 除了依轉速分別風力發電系統外,依照風力驅動發電機的方式也可分成傳動 式及直驅式,傳動式的風力發電系統需要依靠齒輪組來帶動發電機而在風力長期 扭力負荷下造成齒輪的壽命縮短因而增加其維修成本,直驅式的風力發電系統不 需依靠齒輪傳動系統而使風力直接帶動發電機旋轉,在體積考量、噪音問題與維 修成本而言都優於傳動式。
1-2 文獻回顧
直驅式變頻恒速風力發電系統在硬體上如何在實驗室中模擬以及在有轉速 感測器時轉速控制策略的模擬及實現,以上兩者若同時建立的話便不需依靠風力 而擁有穩定的實驗環境;以永磁同步發電機為基礎的風力發電系統在風速變動時 其不同轉速估測方法的比較及順滑模態觀測器在永磁同步馬達的轉速控制應 用,以上各項研究將在以下文獻介紹:1. Junqi Wang 等人“Modeling and Real-Time Simulation of Non-Grid-Connected
Wind Energy Conversion System”[1],此篇論文以永磁同步發電機為架構建立 直驅式變頻恒速風力發電系統並以 DSP 數位訊號處理器實現風力發電機的轉
速控制策略,控制策略採用傳統比例積分控制器,從模擬與實驗結果證明風
速變化時發電機轉速能夠變化到最佳值,然而此篇文獻中直驅式變頻恒速風
力發電系統本身並非為硬體,而是建模在 RT-LAB 此套模擬軟體中,因此其
實驗環境較實際上來的理想。
2. Jemaa Brahmi 等人“A Comparative Study Between Three Sensorless Control
的方式探討了適應性參考模型系統、類神經網路與順滑模態觀測器三種應用
在風力發電系統中永磁同步發電機的轉速與轉子位置估測方法,模擬結果顯
示出在變動風場下,發電機定子電阻值未變化下這三者皆能有效的估測到轉
速與轉子位置且順滑模態觀測器估測結果具有切跳現象,然而當發電機定子
電阻產生變化時只有類神經網路與順滑模態觀測器仍然具有估測能力。
3. Shengwen Fan 等人“High Performance Sensorless Control of PMSM Based on
Sliding Mode Current Observer”[3],此篇文獻利用典型的永磁同步馬達轉速控
制架構搭配順滑模態觀測器從模擬與實驗上驗證了順滑模態觀測器應用在永
磁同步馬達無轉速感測轉速控制的可行性並且將順滑模態觀測器中符號函數
以飽和函數取代以減緩其切跳現象。
4. L.G. González 等人“Synchronization Techniques Comparison for Sensorless
Control applied to Wind Energy Conversion Systems”[4],此篇在前言中提到在 中小型風力發電機中常使用轉速估測法取代安裝轉速感測器以減少成本。
1-3 研究動機
無轉速感測轉速控制起初是在馬達控制領域所提出,其目的是為了免於安裝 轉速感測器帶來的可靠度與成本問題,無轉速感測轉速控制策略同樣的可套用於 發電機上尤其是在風力發電系統長壽命的需求下(帄均二十至二十五年),轉速感 測器的可靠度更顯得重要,大型風力發電機因造價高昂故安裝轉速感測器其成本 與維護相對而言並不是太大的問題,然而對小型風力發電機而言為了爭取最大的 市場效益且保證免維護,因此採用無轉速感測轉速控制是勢在必行的。 在馬達或發電機位置估測策略中卡爾曼濾波器[5](Kalman Filter)與順滑模態 觀測器皆利用定子電壓與電流值估算出轉子目前位置而進一步求得轉速值,然而 與順滑模態觀測器比較起來卡爾曼濾波器中的狀態預測、狀態轉移與狀態觀測矩 陣需要繁雜的計算因此需要高性能的微處理器才有機會實現。類神經網路(Neural Network)速度估測法[3]與順滑模態觀測器的特色都是在系統參數變動時仍然具有估測的能力,也就是對參數變化較不敏感,但是類神經網路的學習往往需要較
長的時間且同樣的有計算量大的問題存在。應用適應性參考模型系統(Model
Reference Adaptive System)[6]來估測轉速與順滑模態觀測器比較起來需要將定
子電壓做同步旋轉座標轉換而需要目前轉子位置值,然而轉子位置即是欲估測值 因此在程序上會比順滑模態觀測器來的多,且為了避免其估測能力在系統參數變 化時下降,因此需多一道參數估測程序而增加其複雜性。 綜合以上比較本文使用順滑模態觀測器來估測發電機的轉子位置與轉速,同 時利用直流馬達帶動永磁同步發電機來模擬直驅式變頻恒速風力發電系統,藉著 實作的電壓與電流迴授電路搭配 DSP 數位訊號處理器 TMS320 F2812 實現發電 機的轉子位置與轉速估測,藉由估測結果觀察順滑模態觀測器的估測能力並驗證 其強健性,此外更利用實作的驅動電路搭配智慧功率模組進行無轉速感測器的發 電機轉速控制實驗,實驗結果驗證了順滑模態觀測器應用於直驅式變頻恒速風力 發電系統的可行性,而在最後本文也將以實驗數據分析順滑模態觀測器適用的風 力發電機種類。 本文研究的風力發電機無轉速感測控制架構圖如圖 1-1 所示,風力發電機採
用 200W 永磁同步發電機(Permanent Magnet Synchronous Generator, PMSG),風
源的部分則以直流馬達來模擬,其詳細帄台架設將於第五章作介紹,順滑模態觀
測器利用發電機產生的相電壓與相電流靜止兩相座標轉換後的值估測到發電機
轉子位置與轉速後將轉速迴授至比例積分(Proportional Integral, PI)控制器的速度
迴路產生電流命令至電流迴路產生電壓命令,再藉由空間向量脈寬調變[7](Space
Vector Pulse Width Modulation, SVM)產生適當的脈波調變信號(Pulse Width
Modulation, PWM)控制全橋全控整流器[8]中的功率開關元件以改變連接發電機 的總負載大小進而改變發電機的轉速至轉速命令值,直流端電阻負載 RL能使整 個系統產生電流,電容 C0的作用為穩定直流電壓與吸收不必要的突波。
Sliding Mode Observer PI PI SVM Inverse Park Transform PMSG *
^
* qi
qi
di
* 0 d i abcv
* dv
* qv
v
* *v
abci
i
i
v
v
^
0 C PI Clarke Transform Park Transformi
i
PWM L R 圖 1-1 風力發電機無轉速感測轉速控制架構1-4 論文大綱
本論文架構安排如下: 第一章中,說明研究動機、研究背景與文獻回顧。 第二章中,介紹風力發電系統架構與永磁同步發電機。 第三章中,介紹順滑模態觀測器與永磁同步發電機向量控制原理, 同時以 Matlab/Simulink 模擬永磁同步發電機轉速估測與控制架構。 第四章中,說明週邊電路與軟硬體介面。 第五章中,實驗帄台與實驗結果。 第六章中,結論與未來展望。 第七章中,參考文獻。第二章
風力發電系統架構
2-1 風力發電系統
風力發電機依照葉片主軸軸向與風向的關係可以分成水帄軸式與垂直軸式 的風力發電機,其中水帄軸式風力發電機如圖 2-1 所示,而垂直軸式的風力發電 機則如圖 2-2 所示,垂直軸式的風力發電機與水帄軸式比較起來具有較低啟動風 速、不受風向限制等優點,但其結構造成風能轉換效率較水帄軸式為低,所以在 發電效益的考量上水帄軸式風力發電機普及率較高。 圖 2-1 水帄軸式風力發電機 圖 2-2 垂直軸式風力發電機水帄軸式的風力發電機依照發電機主軸被葉片主軸帶動的方式可分成傳動 式與直驅式兩種,傳動式的大型風力發電機如圖 2-3 所示,其內部擁有如圖 2-4 所示的齒輪傳動箱,藉由葉片主軸上的大齒輪帶動發電機軸上的小齒輪增加發電 機轉速以獲得較高的功率,然而圖 2-5 中的直驅式大型風力發電機葉片主軸並無 經過齒輪傳動而直接與發電機主軸相連,其與傳動式比較起來具有體積小、節省 維護齒輪箱成本、低噪音等優點,然而由於發電機轉速較低因此需要多極數的發 電機來提高產生的功率。 圖 2-3 傳動式大型風力發電機 圖 2-4 傳動式大型風力發電機齒輪箱 至葉片主軸 齒輪箱 至發電機主軸
圖 2-5 直驅式大型風力發電機
由於直驅式風力發電機擁有上述優點所以近年來除了在大型風力發電機上
蓬勃發展外,在小型風力發電機上更是因為其轉速高不需要齒輪傳動而廣泛使
用,小型風力發電機依照美國風能協會 (American Wind Energy Association,
AWEA)的定義為發電機功率100kW,其中1kW 的更細分為微小型風力發電 機如圖 2-6 所示的 400W 風力發電機,而圖 2-7 則是 5kW 的小型風力發電機,圖 2-6 與圖 2-7 的風力發電機皆屬於直驅式。併網與否依照發電機功率定義於表 2-1[9],離網型與併網型指的是風力發電系統最後是否與電網相連,若與電網相 連稱作併網,反之則是離網,亦稱為獨立型風力發電系統。 表 2-1 併網功率範圍定義 風力發電機功率 形式 大於等於 11kW 併網 1kW 至 10kW 併網或離網 小於 1kW 離網
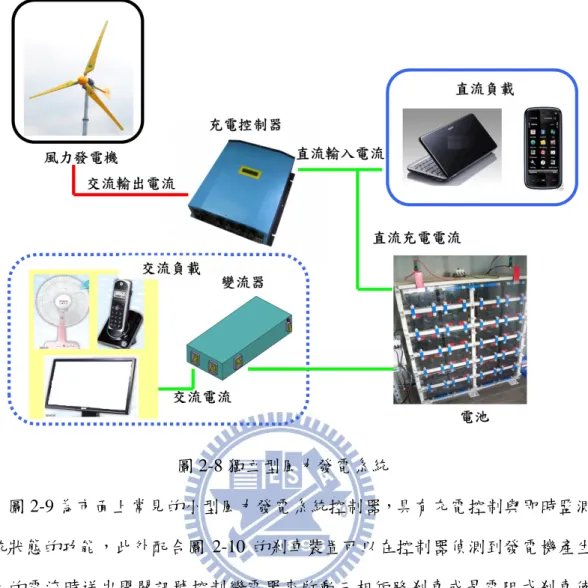
圖 2-6 400W 風力發電機 圖 2-7 5kW 風力發電機 本研究在實驗上沒有與台電的市電併網因此屬於獨立型風力發電系統,目前 在實際應用上其架構常如圖 2-8 所示,風力發電機產生的交流電經過充電控制器 中的整流器整流後對電池充電,視負載端需求而決定是否由變流器將電池直流電 轉換成交流電來使用。
圖 2-8 獨立型風力發電系統 圖 2-9 為市面上常見的小型風力發電系統控制器,具有充電控制與即時監測 系統狀態的功能,此外配合圖 2-10 的剎車裝置可以在控制器偵測到發電機產生 過大的電流時送出開關訊號控制繼電器來啟動三相短路剎車或是電阻式剎車使 風力發電機停機。 圖 2-9 小型風力發電系統控制器
圖 2-10 小型風力發電系統剎車裝置
2-2 風力發電原理
風力發電機發電的原理是將風的動能透過葉片轉換成機械能,再由發電機轉 換成電能,而由空氣動力學可以推導出風的動能能夠轉換出來的機械功率 P[10] 可以表示成 2 3 1 ( , ) 2 P P
C
R V (2-1) 其中 P 的單位為 W,其他符號意義為 R:葉片半徑(m) ρ:空氣密度(kg/m3) V:風速(m/s) β:葉片攻角(deg) λ:尖端速度比,其定義如下R
V
(2-2) 其中ω 為風力發電機機械旋轉角速度(rad/s) Cp:風能轉換效率係數,為葉片尖端速度比λ 與葉片攻角 β 的函數如圖 2-11 所示。圖 2-11 風能轉換效率係數曲線
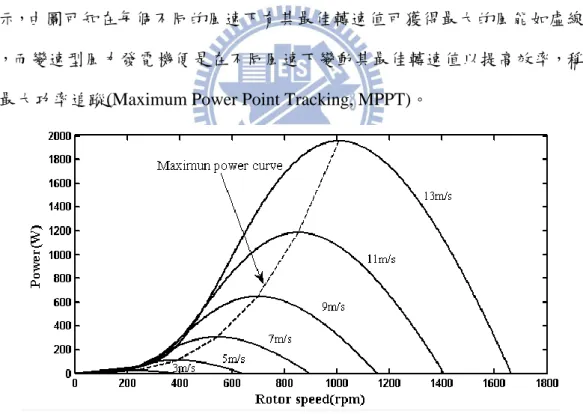
由(2-1)式與(2-2)式搭配 Matlab 模擬可以得到風力發電機在不同風速與轉速
下的功率曲線,以葉片長 1 米的 2kW 小型風力發電機而言其功率曲線如圖 2-12
所示,由圖可知在每個不同的風速下有其最佳轉速值可獲得最大的風能如虛線所
示,而變速型風力發電機便是在不同風速下變動其最佳轉速值以提高效率,稱之
為最大功率追蹤(Maximum Power Point Tracking, MPPT)。
圖 2-12 2kW 風力發電機功率曲線
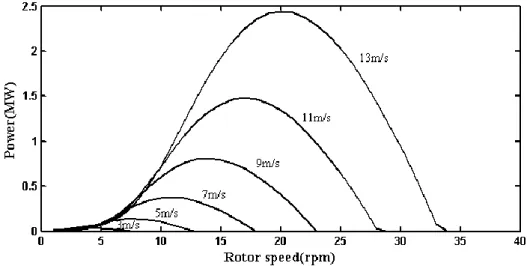
圖 2-13 為 2.5MW 大型風力發電機的功率曲線圖,與圖 2-12 比較起來其轉
速非常低但是由於其葉片長度長達 50 米故可產生相當大的功率,由圖 2-12 與圖
圖 2-13 2.5MW 風力發電機功率曲線
2-3 座標轉換
在介紹永磁同步發電機與推導其數學模型之前首先介紹座標轉換,由於永磁 同步發電機在三相定子座標下的數學模型具有非線性與彼此耦合的特性使其在 分析上較具複雜性,為了簡化上述的數學模型在此使用了將定子靜止參考座標轉 換成同步旋轉參考坐標的方法,三相定子座標向量空間如圖 2-14 所示。 as bs cs α β Fs 2 3 j bs f e as f 4 3 j cs f e 圖 2-14 三相定子座標向量空間 其中 as-bs-cs 座標與 α-β 座標分別為定子三相與兩相靜止座標,定子空間向量Fs 可定義為 2 4 3 3 ( j j ) s as bs cs s s F c f f e f e f j f (2-3)s F 在發電機中可以代表定子電壓、電流或磁通量的向量,c 為轉換常數其值 通常為 3 2 或 3 2 ,c 等於 3 2 時代表轉換前後的物理量是不變的,而當 c 等於 3 2 時 則代表轉換前後的能量大小是不變的,在本文中由於轉換前後物理量大小不變故 選擇 c 為 3 2 。假設α 軸與 as 軸重合,根據複數計算中實部與虛部各自相等的原 則,三相靜止座標與兩相靜止座標之間的關係可以表示成 0 1 1 1 2 2 2 3 3 0 3 2 2 1 1 1 2 2 2 s as as s s bs s bs s cs cs f f f f f T f f f f (2-4) 其中 Tss為 Clarke 轉換矩陣且其反矩陣(Tss)-1為 1 1 0 1 1 3 ( ) 1 2 2 1 3 1 2 2 s s T (2-5) α-β 靜止兩相座標與 d-q 同步旋轉座標(直-交軸座標)的關係如圖 2-15 所示。
α
d
q
θ
ef
αsf
dsf
qsF
sω
eβ
f
βs 圖 2-15 兩相靜止座標與同步旋轉座標 其中α 軸與 d 軸的夾角為 θe,同步旋轉座標以固定ωe的角速度旋轉,靜止兩相 座標與同步旋轉座標的轉換關係如下cos sin sin cos ds e e s d s s qs e e s s f f f T f f f (2-6) 1 cos sin ( ) sin cos e e d s e e T (2-7) 其中 Tsd稱為 Park 轉換矩陣,式(2-6)可以表示成 0 0 cos sin 0 sin cos 0 0 0 1 1 1 1 2 2 cos sin 0 2 3 3 sin cos 0 0 3 2 2 0 0 1 1 1 1 2 2 2 ds e e s qs e e s s s e e as e e bs cs f f f f f f f f f (2-8) 經由矩陣運算與三角函數和角公式後式(2-8)可以寫成 0 2 2
cos cos( ) cos( )
3 3
2 2 2
sin sin( ) sin( )
3 3 3 1 1 1 2 2 2 e e e ds as as qs e e e bs s bs s cs cs f f f f f K f f f f (2-9) 矩陣 Ks為靜止三相座標與同步旋轉座標間的轉換矩陣,下一節中將會介紹如何 套用座標轉換公式於永磁同步發電機數學模型的推導上。
2-4 永磁同步發電機
永磁同步發電機在構造上由內部永久磁鐵轉子與外部定子線圈繞組所組 成,所謂的同步電機其定義為機械轉速與產生的電氣頻率同步[11],它們之間的 關係可以表示成 120 e p f (2-10) 其中 fe為電氣頻率,ω 為機械轉速而 p 則是發電機的極數,永磁同步發電機轉子 上依照永久磁鐵排放的位置可以分成表面黏附式與內置式兩種而各有不同的用途,本文中所使用的則是表面黏附式。永磁同步發電機由於不需要電刷與滑環來 建立旋轉磁場,因此有體積小與節省維護成本等優點且廣泛運用於直驅式風力發 電機中,而其缺點是製造永久磁鐵所需的稀土材料昂貴尤其是在大型風力發電機 中更為明顯,以 400W 的永磁同步發電機來說,其實際構造如圖 2-16 所示。 圖 2-16 400W 永磁同步發電機結構 由圖中轉子永久磁鐵的排列方式可以判斷其為表面黏附式的永磁同步發電 機,而由永久磁鐵個數可以得知極數為 12 極,當風吹動葉片帶動轉子旋轉時其 磁力線切割定子繞組線圈使其產生與轉子旋轉頻率同步的三相交流電輸出。 圖 2-17 為永磁同步發電機的等效電路模型,間隔 120 度的任一相由相電流 變化產生的反電動勢、定子電阻與定子電感與定子電壓所組成,圖中的 Va、Vb 和 Vc依序代表 a、b 與 c 相的定子電壓,eas、ebs和 ecs依序代表 a、b 與 c 相的反 電動勢,而由於三相帄衡,在三相中的任一相電阻值皆為 Rs且任一相的電感值 皆為 Ls,由自感與互感的觀念能夠推得線電感為相電感大小的三倍之關係,而線 電阻則直觀的可以看出其為相電阻大小的兩倍。
永久磁鐵 定子三相繞組
ebs eas ecs Va Vb Vc n Rs Ls Rs Ls Rs Ls 圖 2-17 永磁同步發電機三相等效電路 永磁同步發電機在三相靜止座標與同步旋轉座標上的示意圖如圖 2-18 所 示,圖上座標軸與夾角的定義與上一節所介紹的座標轉換定義相同。 d-axis q-axis λf as-axis bs-axis cs-axis as’ as bs cs cs’ bs’ θe Rotor Stator coil ωe 圖 2-18 三相靜止與同步旋轉座標上的永磁同步發電機 由圖 2-18 可以推導出永磁同步發電機在三相靜止座標上的定子電壓方程式為 sin( ) 0 0 0 0 2 0 0 0 0 sin( ) 3 0 0 0 0 2 sin( ) 3 f e as s as s as bs s bs s bs f e cs s cs s cs f e v R i L i d d v R i L i dt dt v R i L i (2-11)
其中
va s vb s vcs
T與
ias ibs ics
T 分別代表三相靜止座標上的定子電壓與電 流,λf 為轉子磁通鏈,將(2-11)做座標轉換得到同步旋轉座標上的定子電壓方程 式為 0 s d e q d d q q e f e d s q d R L L v dt i v d i L R L dt (2-12) 其中vd vqT與id iqT分別代表同步旋轉座標上的定子電壓與電流,Ld與 Lq 分別為同步旋轉坐標直軸與交軸上的電感值,而對表面黏附式的永磁同步發電機 而言它們的大小相等其值為 L(Ld = Lq = L)且可表示成 s ls L L L 1.5 (2-13) Lls為漏電感,一般而言甚小所以可以忽略,也因此得到直交軸電感為相電感 1.5 倍的關係,此外永磁同步發電機的電磁轉矩方程式為 3 2 e f q t q p T
i K i (2-14) 上式中 Te為電磁轉矩,Kt為扭矩常數,而永磁同步發電機的機械方程式則為 e L d J T T B dt (2-15) 其中 J 為永磁同步發電機的轉動慣量,TL為負載扭矩而 B 為阻尼係數。第三章
永磁同步發電機無轉速感測轉速控制理論
3-1 順滑模態控制理論
順滑模態觀測器的理論是來自於非線性控制理論中的順滑模態控制(Sliding
mode control)理論。可變結構控制[12](Variable Structure Control)是一種使受控系 統產生兩個以上的子結構後藉著切換條件來達到控制目的控制策略,此種控制策 略在 1950 年代就曾經被前蘇聯的一些學者與工程師應用於馬達控制上並且發現 了順滑模態的系統行為,到了 1969 年前蘇聯學者 V. Utkin 以俄文發表的順滑模 態理論的著作被翻譯成英文發行後更因為其內容簡單易學而逐漸的吸引更多人 投入這方面的研究,除此之外,順滑模態控制理論吸引人的地方還有它的強健 性,亦即對於外界雜訊與參數變化較不敏感。順滑模態控制理論的定義為先使受 控系統產生兩個以上的子結構後再利用刻意加入的切換條件產生順滑模態以達 到控制目的且不連續的切換條件經由等效控制[13]證明可以產生連續的順滑模 態,此定義更進一步的說明如下,假設有一系統可以表示成
( , ( ))
x
f x u x
(3-1) 其中 x 為系統狀態,u(x)為控制輸入可以表示成下列的切換條件( )
( )
0
( )
( )
( )
0
u
x
S x
u x
u
x
S x
(3-2) 其中S(x)為順滑函數,(3-2)的切換條件可如圖3-1的符號函數(Sign Function)所示 u+(x) u-(x) S(x) u(x) 圖 3-1 符號函數在圖 3-1 中 S(x)分成大於零、等於零與小於零三個子空間,S(x)=0 時必頇是 連續的且包含系統狀態的帄衡點 x=0,而順滑模態控制的目的便是使 S(x)=0 時 產生順滑模態,此時的 S(x)又稱之為順滑帄面,當系統初始狀態 x(0)位於順滑帄 面之外時,在切換條件控制輸入作用下必需確保狀態軌跡在有限的時間 th之內接 觸到順滑帄面,這段過程叫做迫近模態(Reaching Mode),當狀態軌跡進入順滑帄 面後產生順滑模態(Sliding Mode),此時狀態軌跡便會朝著系統的帄衡點逼近並 且不再離開順滑帄面,上述的過程如圖 3-2 所示。 x(0) x(∞)=0 迫進模態 x(th) 順滑模態 帄衡點 S(x)=0 圖 3-2 迫近模態與順滑模態 在理論上若是切換條件的控制輸入擁有無限大的頻率,可以想像的是在圖 3-1中若是u+(x)與u-(x)同時存在則順滑模態將永遠存在,然而在實際物理系統上 皆有其有限的切換頻率或是必定存在的時間延遲故理想上的順滑模態不可能存 在,因此實際上系統狀態在順滑模態附近的行為常以圖3-3所示。 x(0) x(th) S(x)=0 S(x)=ε→0 S(x)=-ε→0 帄衡點 圖 3-3 實際上的順滑模態產生
在圖 3-3 中順滑帄面被夾在兩個一正一負的順滑函數中,它們的大小 ε 趨近 於零,當系統狀態軌跡進入此夾層時因為有限大的切換頻率因此無法固定的沿著 順滑帄面趨近帄衡點,而是在上下兩個夾層中來回跳動而造成所謂的切跳 (Chattering)現象,這種現象在高頻時往往會造成受控系統中未建模的高頻成分而 使系統不穩定,為了減緩這種現象需要用到順滑層[14]的概念,也就是將圖 3-1 中的符號函數以圖 3-4 所示的飽和函數取代。 1 -1 S(x) e -e 圖 3-4 飽和函數 將 S(x)簡寫成 S 後圖 3-4 所示的飽和函數 Sat(S)可以由下式表示之
1
( )
1
S
e
S
Sat S
e
S
e
e
S
e
(3-3) 在圖 3-4 中 S e這段範圍為邊界層的厚度,當順滑函數進入邊界層時其控制輸 入值縮小為 e S 因而減緩了切跳現象故邊界層厚度愈厚時切跳現象將愈不明顯,然 而同時卻必頇付出較低的控制精度的代價,其原因是較小的控制輸入使得系統狀 態不易逼近於帄衡點。 使受控系統在順滑帄面附近時產生順滑模態行為的條件稱為順滑條件,順滑 條件可由圖 3-5 來說明,當系統狀態位於順滑帄面附近時若是 S 大於零則其值頇 隨時間遞減,也就是其對時間微分必頇小於零才能迫使系統狀態朝順滑帄面移 動,相反的,當 S 小於零則其對時間微分必頇大於零。S(x)>0 S(x)<0 S(x)=0 圖 3-5 順滑條件 上述說明可由下式表示之 0
lim
0
sSS
(3-4) 要使受控系統產生順滑模態的先決條件便是要使系統狀態在順滑帄面外時 產生迫近模態,而使得系統狀態產生迫近模態的條件稱為迫近條件,其定義為使 系統狀態在有限時間內接觸到順滑帄面,而最常用的迫近條件為0
SS
S
S
(3-5) 其中σ 為一大於零的實數,為了證明上述條件能夠在有限時間內使得系統狀態進 入順滑帄面,因此選定以下的 Lyapunov 函數 V 20
V
S
(3-6) 對(3-6)微分得2
V
SS
(3-7) 當(3-5)成立時可推得2
2
0
dV
V
S
V
dt
(3-8) 由(3-8)知 V 的一次微分小於零滿足 Lyapunov 函數的定義,將(3-8)移項整理後得2
dV
dt
V
(3-9) 對(3-9)於時間 0 到 t 時積分得
( ) ( ) (0) (0)2
|
2
( )
(0
2
V t V t V VdV
V
V t
V
dt
V
(3-10) 由(3-10)可以得知下式成立0
V t
( )
V
(0)
t
(3-11) 由(3-12)可以求得 t 必頇滿足(0)
V
t
(3-12) (3-12)中的 t 為一有限值因此證明 V 能夠在有限時間內趨近於零,也證明了(3-5) 能夠滿足達到迫近模態的需求,當 σ 趨近於零時(3-5)與(3-4)是相同的所以(3-4) 又稱為迫近順滑條件,同時 V 也滿足了 Lyapunov 穩定性理論[15]中的漸進穩定。3-2 順滑模態觀測器
在介紹順滑模態觀測器首先介紹基本的全階觀測器(Full Order Observer),考
慮一線性系統如下
x
Ax
Bu
y
Cx
(3-13) 其中 x 為狀態向量,u 為控制輸入而 y 為系統輸出,A、B 與 C 為不為零的常數 矩 陣 且 C 為 滿 秩(Full rank) ,由 線 性系統 理 論 [16]知 若 (C, A) 是可 觀測 的 (Observable)則此系統的狀態可以由以下的全階觀測器估測之ˆ
ˆ
(
ˆ
)
x
Ax
Bu
L Cx
y
(3-14) 其中 ˆx 為估測的狀態向量,L 為不為零的常數矩陣,將(3-14)與(3-15)相減後得ˆ
(
)
e
A LC e
e
x
x
(3-15) 根據線性系統理論可任意指定 A-LC 的特徵值使得估測誤差 e 趨近於零,考慮以 下的順滑模態觀測器ˆ
ˆ
(
ˆ
)
x
Ax
Bu
Ksign y
y
(3-16)其中 ˆy 為估測輸出而 K 為常數向量矩陣又稱為觀測器增益,觀察(3-14)與(3-16) 可以發現它們的差異在於順滑模態觀測器將全階觀測器的連續輸出誤差取代成 不連續的符號函數,令 y=x,(3-16)之順滑模態觀測器變成:
ˆ
ˆ
(
ˆ
)
x
Ax
Bu
Ksign x
x
(3-17) 利用第二章所介紹的座標轉換可以推導永磁同步發電機在兩相靜止座標軸上的 數學模型如下0
0
s sv
e
R
i
i
d
L
L
L
i
i
R
v
e
dt
L
L
L
(3-18) 其中 iα、iβ為發電機靜止兩相座標上的定子電流,vα、vβ為發電機靜止兩相座標 上的定子電壓而 eα、eβ為發電機靜止兩相座標上的反電動勢可以表示成sin
cos
f e e f e ee
e
(3-19) 由(3-17),則順滑模態電流觀測器之控制方程式如下1
ˆ
0
(
)
ˆ
ˆ
ˆ
ˆ
1
ˆ
(
)
0
s sv
R
sign i
i
i
i
d
L
L
K
L
v
R
i
dt i
sign i
i
L
L
L
(3-20) 其中 ˆi與 ˆi為靜止兩相座標定子電流估測值,同時取電流估測誤差 i與 i為ˆ
ˆ
i
i
i
i
i
i
(3-21) 將(3-18)與(3-20)相減得1
0
( )
1
( )
0
s se
R
sign i
i
i
d
L
L
K
L
e
i
i
R
dt
sign i
L
L
L
(3-22)在 K 的作用下,電流估測誤差將趨近於零而(3-22)將變成
( )
( )
e
Ksign i
z
e
Ksign i
z
(3-23) 其中 zα與 zβ為符號函數所切換出來的靜止兩相座標軸反電動勢估測值,取順滑 函數為S
i
S
S
i
(3-24) 其中 Sα與 Sβ為順滑函數,因此順滑模態電流觀測器的設計目的便是要藉著切換 條件的輸入下使電流估測誤差狀態軌跡進入
T S 0 0 的順滑帄面後產生順滑 模態,最後估測誤差朝著帄衡點零趨近,將選取的順滑函數代入(3-4)中得
2 21
( )
1
( )
0
sR
SS
i
i
e i
Ki sign i
L
L
e i
Ki sign i
L
(3-25) 當 K 滿足上式時除了滿足迫近順滑條件之外也能確保此順滑模態觀測器為漸進 穩定,由(3-25)知選取的順滑函數若要滿足迫近順滑條件 K 的大小必頇滿足
max
,
K
e
e
(3-26) 然而由(3-23)得到的反電動勢估測值為不連續,必頇經過低通濾波器後才能得到 連續反電動勢估測值eˆ 與 eˆ ,此低通濾波器 H(s)的轉移函數可設計為 ( )
c cH s
s
(3-27) 其中ωc為截止角頻率,將連續反電動勢估測值搭配(3-19)可以推得永磁同步發電 機電氣角估測值ˆe為 1ˆ
ˆ
tan
ˆ
ee
e
(3-28)引入低通濾波器會造成估測的位置值相位落後真實值,因此需要加上角度補償如 1
ˆ
tan
e e c
(3-29) 其中Δθe為補償的角度而ˆ 為電氣角速度估測值,最後的轉子位置估測值e ˆm為ˆ
ˆ
e e mP
(3-30) 其中 P 為發電機極對數為極數的一半,將(3-30)代入下式可得發電機轉速ˆ
ˆ
d
mdt
(3-31) 順滑模態電流觀測器結構圖如圖 3-6 虛線方塊中所示。 SMO Based PMSG Model
K LPF Position Computation Angle compensation
i
vˆi
ˆe ˆ e e ˆ
i
z 1 P ˆ m d dt ˆ
m
圖 3-6 順滑模態轉速觀測器結構圖 為了使上述數學模型能應用於 DSP 數位訊號處理器中,在此將(3-20)離散化為 1 1ˆ
(
1)
ˆ
( )
ˆ
ˆ
(
1)
( )
s si n
i n
KT
A
B T
Z
i n
L
i n
(3-32) 其中 Ts為取樣時間,n 為正整數,A1、B1與 Z 定義如下: 1 1 0 1 0 s s s s R T L A R T L , 1 ( ) ( ) v n L B v n L , ˆ ( ( ) ( )) ˆ ( ( ) ( )) sign i n i n Z sign i n i n 而(3-27)的低通濾波器則離散化[17]如下
(
1)
( ) 2
c[ ( )
( )]
o n
o n
f i n
o n
(3-32)其中 o 為濾波器輸出而 fc與 i 分別為截止頻率與濾波器輸入。
3-3 永磁同步發電機向量控制理論
透過磁場向量控制(Filed Oriented Control)[18]理論將永磁同步發電機中非線
性且彼此耦合的部分轉換成線性解耦控制,而藉由解耦後直交軸的電流控制迴路 達到控制發電機轉速的目的,電流迴路中的直軸電流迴路如圖 3-7 所示。 1 Ls+Rs PI * 0 d i
Liqωe * dv
i
d 圖 3-7 直軸電流迴路方塊圖 由第二章的式(2-13)知直軸電流不影響表面黏附式的永磁同步發電機電磁轉 矩,因此將圖 3-7 中直軸電流命令設為零將可得到最大電磁轉矩,至於圖 3-7 中 的虛線方塊為耦合項其中含轉速成分,然而在風力發電機轉速不快的條件下可忽 略此耦合項,圖 3-8 為交軸電流迴路同樣的虛線方塊中的耦合項在此也可忽略。 速度迴路則如圖 3-9 所示,由圖 3-9 知轉速控制與交軸電流迴路有直接的關聯, 圖 3-7 至圖 3-9 中所有迴路中的比例積分控制器其比例增益與積分增益皆由觀察 響應圖形而做適當的調整。1 Ls+Rs PI * q i
* q v 1 Js+B p 2 λf
e qi
Kt L T
圖 3-8 交軸電流迴路方塊圖 iq PI *
Current Loop * qi
圖 3-9 速度迴路方塊圖3-4 永磁同步發電機轉速估測與控制模擬結果
經過本章前三節的理論推導搭配 Matlab/Simulink 軟體建立順滑模態觀測器 的數學模型並且與風場、電路模型結合進行模擬,模擬過程所使用的永磁同步發 電機參數如下表所示。 表 3-1 發電機模擬參數 永磁同步發電機模擬參數 轉子慣量 0.185×10-3kg·m2 定子電阻 1.6Ω 直軸電感 6.365mH 交軸電感 6.365mH 轉子磁通鏈 0.185Wb 極數 4為了模擬發電機轉速未受控制下時隨風而動的轉速響應而建立隨時間 t 變動的風 場[19],其數學式如下
3.25*(1 0.09sin(80
) 0.15sin(32
))
w
t
t
(3-30) 其中 w 為風速,而為了更貼近真實風速的變化而加入雜訊形成如圖 3-9 所示的風 場模擬圖,此時發電機轉速將隨風場在 0.2 秒內形成如圖 3-10 的變化。 圖 3-10 隨時間變動的風場 圖 3-11 隨風場變動的發電機轉速 此時順滑模態估測器估測到的轉速如圖 3-12 所示,與圖 3-11 比較得知估測 值將會在真實值附近抖動,這符合了切跳現象且由圖 3-13 可以觀察到其估測誤 差被限制在一定範圍(約0.6rad 之間)內抖動。圖 3-12 轉速估測圖 圖 3-13 轉速估測誤差圖 在同樣的風速變化影響下此時發電機的轉子真實位置將如圖 3-14 所示,同 時經過角度補償後的估測轉子位置則如圖 3-15 所示,由圖 3-15 知順滑模態觀測 器轉子位置估測值約需 0.005 秒收斂到真實值。 圖 3-14 真實轉子位置
圖 3-15 估測轉子位置 同樣的條件下電流觀測器的輸入與輸出,也就是定子電流在α 軸分量 iα的真 實值與估測值分別如圖 3-16 與圖 3-17 所示,由圖 3-18 的 iα估測誤差可以看出其 具有與轉速相同的切跳現象。 圖 3-16 iα真實值 圖 3-17 iα估測值
圖 3-18 iα估測誤差 當順滑模態觀測器中的觀測器增益 K 的大小無法滿足(3-25)中的迫近順滑條 件時將無法估測到真實轉速,在發電機轉速 400rpm 時圖 3-19 的反電動勢 eα峰 值絕對值大小約 14V,K 值等於 5 時將無法滿足(3-25)而使轉速估測能力失效而 產生如圖 3-20 之轉速估測情形。。 圖 3-19 發電機 400rpm 時的 eα 圖 3-20 K=5 時 400rpm 轉速估測結果
當發電機的真實轉速與轉子位置都能被估測到時便能利用它們來進行風力 發電機無轉速感測轉速控制的模擬,圖 3-21 模擬的是在風速固定下,命令為 250rpm 時具轉速感測的轉速控制響應圖,由此圖可以得知其需 0.01 秒的時間收 斂到命令值。 圖 3-21 具轉速感測的轉速響應(命令為 250rpm) 圖 3-22 是當發電機採用無轉速感測轉速控制時的響應圖,將此圖與圖 3-21 比較發現兩者響應圖形類似但圖 3-22 具有明顯的切跳現象。 圖 3-22 無轉速感測的轉速響應(命令為 250rpm) 圖 3-23 與圖 3-24 為發電機直軸電流控制響應圖,在直軸命令為零之下由圖 3-23 可以看出當使用轉速感測控制策略時發電機直軸電流約需 0.015 秒收斂到命 令值而無轉速感測時由圖 3-24 可以看出直軸電流則在 0.02 秒時在收斂至命令附
近抖動。圖 3-25 與圖 3-26 兩種不同控制策略下的交軸電流響應圖也有同樣的現 象,此外也看出無轉速感測的交軸電流響應比具轉速感測時慢了約 0.05 秒,綜 合以上敘述,雖然無轉速感測時的電流迴路需要比較多的時間來追蹤命令,然而 此差距非常短而不會對轉速控制造成明顯的影響。 圖 3-23 具轉速感測的直軸電流響應 圖 3-24 無轉速感測的直軸電流響應 圖 3-25 具轉速感測的交軸電流響應
圖 3-26 無轉速感測的交軸電流響應 由於在真實自然環境中風速往往會隨著時間變動,因此發電機的轉速命令需 要隨著風速而改變,圖 3-27 與圖 3-28 便是模擬在風速改變下發電機轉速命令在 0.05 秒時由 250rpm 變動至 500rpm 的響應圖,圖 3-28 顯示出無轉速感測的轉速 控制能夠在命令瞬間變動時仍然擁有良好的追蹤能力。 圖 3-27 變動命令下具轉速感測的轉速響應圖 圖 3-28 變動命令下無轉速感測的轉速響應圖
第四章
順滑模態觀測器週邊電路與控制器軟硬體介面
4-1 永磁同步發電機線電壓與相電流迴授電路
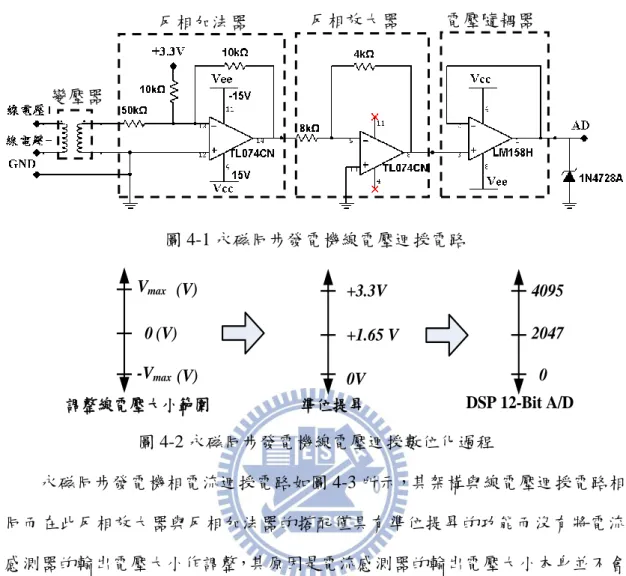
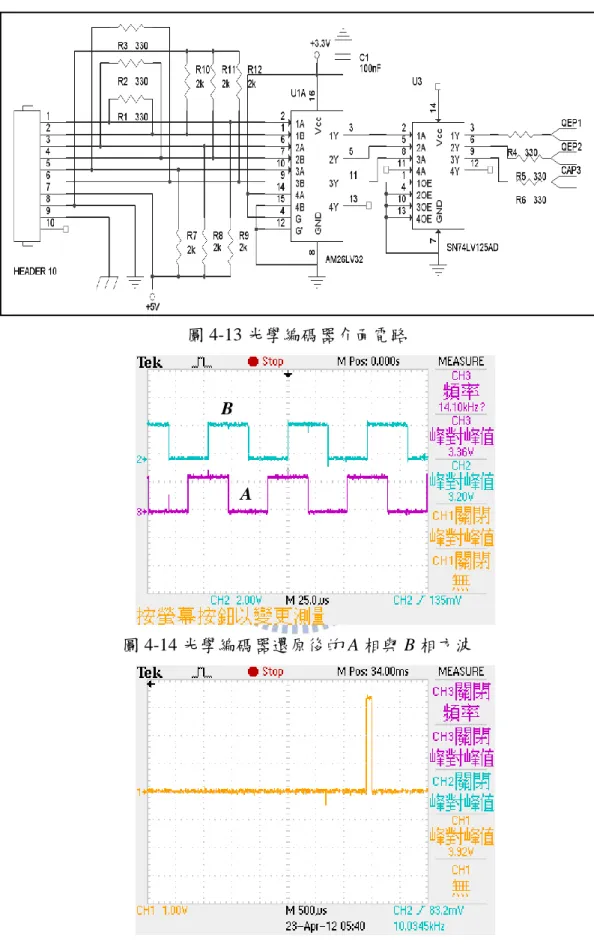
永磁同步發電機轉速估測以及控制實驗需要硬體與軟體互相配合才能進 行,由於順滑模態觀察器計算發電機轉子位置與轉速時需要發電機相電壓與相電 流的資訊,因此在硬體方面首先需要的便是發電機相電壓與相電流的量測電路然 後再將量測到的類比電壓/電流值由 DSP 轉換成數位值後進到順滑模態觀測器的 程式中運算,由於實驗中所用的永磁同步發電機並無引出中性線故無法量測其相 電壓,因此在第五章將會提出將量測到的線電壓轉換成相電壓的方法。 永磁同步發電機線電壓迴授電路如圖 4-1 所示,由於發電機產生的額定電壓 峰值大小為正負 80V 遠超過一般運算放大器可接受的輸入電壓範圍,因此在進 入運算放大器之前必需經由變壓器(規格: 110Vrms:12Vrms)經過一次降壓後再將 二次側的電壓值輸入運算放大器,除了達到降壓的目的外也由於其一次側與二次 側不共地的關係而隔離了發電機與 DSP 數位訊號處理器,兩個變壓器接法以 A 相為共地如此方能消去電壓諧波成分[20],圖 4-1 所示的電路除了剛才所提到的 變壓器之外還包括了反相加法器、反相放大器及電壓隨耦器,適當的調整反相加 法器與反相放大器的外接電阻後使其將變壓器二次側線電壓縮小為原來的十分 之 一 且 提 供 了 1.65V 的 準 位 提 昇 以 符 合 DSP 類 比 電 壓 輸 入 大 小 的 限 制 (0~3V)[21],其中輸入的 3.3V 與地來自於 DSP 的類比輸出腳位,至於電壓隨耦 器的功能為將輸入電壓大小以原來大小輸出但是藉由運算放大器高阻抗的特性 能夠再度將量測端與輸入端做隔離,最後在 DSP 的類比輸入與地之間並聯一齊 納二極體(Zener Diode),其功能為限制前端電路輸出大小最多不超過其崩潰電壓 3V,也就是 DSP 類比輸入大小的限制,線電壓由類比到數位化的整段過程如圖 4-2 所示。圖 4-1 永磁同步發電機線電壓迴授電路 Vmax -Vmax 0 0V +1.65 V (V) (V) (V) +3.3V 0 2047 4095 準位提昇 調整線電壓大小範圍 DSP 12-Bit A/D 圖 4-2 永磁同步發電機線電壓迴授數位化過程 永磁同步發電機相電流迴授電路如圖 4-3 所示,其架構與線電壓迴授電路相 同而在此反相放大器與反相加法器的搭配僅具有準位提昇的功能而沒有將電流 感測器的輸出電壓大小作調整,其原因是電流感測器的輸出電壓大小本身並不會 超過 DSP 類比輸入大小的限制(0~3V),電流感測器 LA 55-P 如圖 4-4 所示,其類 型為霍爾效應環路型,能夠將感測電流衰減成 1000:1 的電流訊號後經過 330Ω 的電阻轉換成電壓訊號輸出。相電流由類比到數位化的過程如圖 4-5 所示。 圖 4-3 永磁同步發電機相電流迴授電路 變壓器 反相加法器 反相放大器 電壓隨耦器 反相放大器 電壓隨耦器 反相加法器
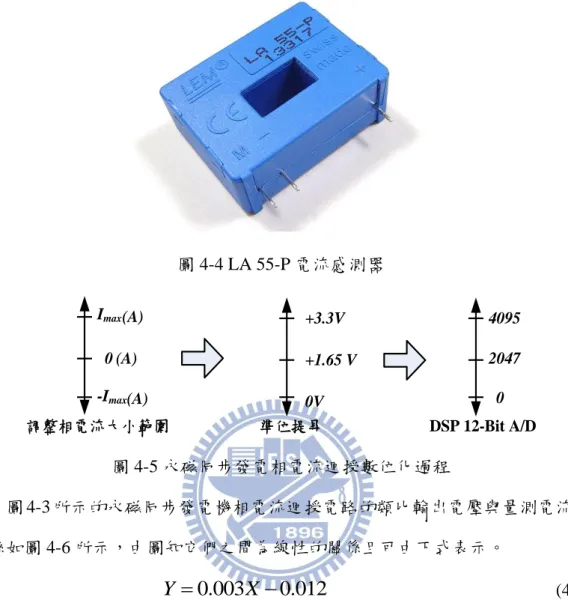
圖 4-4 LA 55-P 電流感測器 Imax -Imax 0 0V +1.65 V (A) (A) (A) +3.3V 0 2047 4095 DSP 12-Bit A/D 準位提昇 調整相電流大小範圍 圖 4-5 永磁同步發電相電流迴授數位化過程 圖 4-3 所示的永磁同步發電機相電流迴授電路的類比輸出電壓與量測電流的 關係如圖 4-6 所示,由圖知它們之間為線性的關係且可由下式表示。
0.003
0.012
Y
X
(4-1) 其中 Y 代表的是待測電流(A)而 X 則為輸出電壓(mV)。 圖 4-6 類比輸出電壓與待測電流關係4-2 智慧功率模組
智慧功率模組(Intelligent Power Module, IPM)常應用於交流馬達驅動器與變
頻電源系統中,IPM 將功率元件縮小後封裝於一塊模組之內因此具有體積小的優 點,但其散熱為重要的問題,IPM 內部的前級驅動電路可使外部的光耦合器驅動 電路的設計較為簡化,應用於三相交流電源系統中的 IPM 如圖 4-7 中的虛線方 塊所示,內部由六個 IGBT 功率開關元件(標註於圖中紅框處)、六個二極體與四 組 前 級 驅 動 電 路 (Pre-driver) 所 組 成 。 在 本 文 中 所 使 用 的 IPM 為 富 士 的 7MBP75RA060,其規格如表 4-1 所示而實體結構則如圖 4-8 所示。 圖 4-7 智慧功率模組內部結構 圖 4-8 7MBP75RA060 功率模組實體結構 IPM IGBT Cs

![圖 2-10 小型風力發電系統剎車裝置 2-2 風力發電原理 風力發電機發電的原理是將風的動能透過葉片轉換成機械能,再由發電機轉 換成電能,而由空氣動力學可以推導出風的動能能夠轉換出來的機械功率 P[10] 可以表示成 2 31 ( , ) 2 PPC R V (2-1) 其中 P 的單位為 W,其他符號意義為 R:葉片半徑(m) ρ:空氣密度(kg/m 3 ) V:風速(m/s) β:葉片攻角(deg) λ:尖端速度比,其定義如下 R V (2-2)](https://thumb-ap.123doks.com/thumbv2/9libinfo/8758657.207695/23.892.236.695.109.450/系統剎車轉換出來機械功率可以表示葉片V風速ms速度定義如下R.webp)