國
立
交
通
大
學
機械工程系
碩
士
論
文
開發一利用慣性感測器與肌電訊號分辨日常生活與
跌倒的偵測系統
Developing an inertial sensor system integrated with
electromyography for distinguishing falls from
activities of daily living
研 究 生:王致中
指導教授:楊秉祥 博士
開發一利用慣性感測器與肌電訊號分辨日常生活與跌倒的偵測系統
Developing an inertial sensor system integrated with electromyography for
distinguishing falls from activities of daily living
研 究 生:王致中 Student:Chih-Chung Wang 指導教授:楊秉祥 博士 Advisor:Bing-Shiang Yang, Ph.D. 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
2009
Hsinchu, Taiwan, Republic of China
中文摘要 開發一利用慣性感測器與肌電訊號分辨日常生活與跌倒的偵測系統 學生:王致中 指導教授:楊秉祥 博士 國立交通大學機械工程學系 摘 要 本研究以實驗評估肌電訊號於跌倒辨識之可行性,主要目標為開發一結 合慣性感測器與肌電訊號(electromyography)量測系統之跌倒辨識系統,期 能提高現有穿戴式跌倒辨識技術的速度與準確率,未來用以結合跌倒防護 系統降低跌倒傷害的發生率或嚴重性。 於實驗室環境中同步利用光學式動作擷取系統擷取運動學資訊,以及肌 電訊號量測系統取得肌肉活化程度,紀錄受測者進行日常生活動作(例如 坐到站、彎腰檢物與行走等)與行走中不預期遭絆倒之資料,用以建立跌 倒判別之數學模式。僅使用運動學資訊(速度與加速度)之跌倒辨識率約 為85%,而單獨使用肌電訊號之跌倒辨識率則約為 70%,然而使用肌電訊 號之辨識速度快於使用運動學資訊。除此之外,合併使用運動學與肌電訊 號辨識跌倒,可將跌倒辨識率提升至95%,同時辨識速度也有相當的提升, 相較於單獨使用運動學或肌電訊號資訊,有較佳之跌倒辨識率與較快之辨 識速度。此一成果證實了肌電訊號於跌倒辨識之潛力,以及結合慣性系統 取得運動學資訊以辨識跌倒的應用方式。
英文摘要
An inertial sensor system integrated with electromyography for
distinguishing falls from activities of daily living
student:Chih-Chung Wang Advisors:Bing Shiang Yang, Ph.D.
Department of Mechanical Engineering National Chiao Tung University
ABSTRACT
Falls are leading cause of unintentional injuries and deaths, especially in the elderly. To detect falls early and accurately, and activate fall protecting devices in time, is important and could reduce fall-related socioeconomic cost. Kinematic variables obtaining by inertia sensors, such as accelerometers and gyroscopes, have been used to distinguish falls from activities of daily living (ADLs). Using inertial sensors could detect a fall in 300-400 ms after the fall initiation. However, by using electromyography (EMG) of selective muscles, it is possible to reduce this time to ~200 ms. The purpose of this study is to
examine the possibility of combing inertial and EMG sensors to develop a fast and accurate fall detecting device. Laboratory simulated trip falls were corrected identified with 85% accuracy by kinematic data alone, with 70% accuracy by EMG alone, and 95% accuracy by using both kinematics and EMG. Among the corrected identified falls, the fall detect time was significantly shorter when using EMG as compared with using kinematic variables alone. Therefore, EMG sensors could be combined with inertial sensors for developing a faster fall detecting device.
誌謝
首先誠摯的感謝指導教授楊秉祥 博士,悉心的指導使我得以略窺學術 領域的深奧,不吝花費時間與學生討論,並指點正確的方向,使我在這些 年獲益匪淺。老師對研究的嚴謹與要求更是我的學習典範。 本論文的完成亦須特別感謝「動作生物力學與醫學應用實驗室」的各位 成員,尤其是博班學長玉瑭的大力協助修訂、同儕馨云、學箴與學弟顯庭 的建議與鼓勵。因為有你們的中肯建議及幫忙,使得本論文能夠更完整而 嚴謹。 感謝松緯提醒我各個生活與學業中的注意事項,補齊我腦袋裡少掉的好 幾條神經迴路;也感謝貽婷學姊在我碩一時三不五時陪我閒聊;感謝柏伽、 祥晴、廷昇,陪我吃飯玩鬧打電動發洩鬱悶;感謝碩一學弟妹,禮拜一三 老是要麻煩你們順便幫忙買正餐;感謝博班學長奕霖,讓我多了一張空桌 子可以用;也感謝目前還不是我女朋友的不知名女子,因為還沒認識妳, 所以我有很多時間專注於學業與自己的興趣。 兩年多的日子,實驗室生活雖然偶有苦悶,但實驗室裡共同的生活點 滴,學術上的討論、言不及義的閒扯跟胡說八道、死線趕進度的革命情感, 在論文完成時都成為閃耀的回憶。感謝各位實驗室夥伴的共同砥礪,大家 的陪伴讓兩年多的研究生活變得絢麗多彩,良師益友實為本實驗室最大的 資產。 最後,謹以此文獻給我摯愛的雙親,感謝你們的鼓勵、栽培與教誨,沒 有你們的支持我無法一路成長至今。 「得之於人者太多,出之於己者太少。」 「因為需要感謝的人太多,就感謝天吧。」 -陳之藩 謝天-目錄
中文摘要... i 英文摘要...ii 誌謝...iii 目錄... iv 表目錄... v 圖目錄... v 一、前言... 1 1.1 研究背景與動機... 1 1.2 研究目的... 4 二、文獻回顧... 6 2.1 跌倒相關研究... 6 2.1.1 跌倒的定義... 6 2.1.2 跌倒的風險因子... 6 2.1.3 年紀與性別對跌倒盛行之影響... 7 2.1.4 跌倒後之回復反應 (fall recovery)... 9 2.1.5 跌倒後之應對策略 (fall strategy) ... 12 2.1.6 模擬跌倒的形式... 13 2.2 跌倒與日常生活動作辨識... 15 2.2.1 跌倒辨識... 15 2.2.2 日常生活動作辨識... 21 2.3 跌倒相關肌電訊號(EMG)研究... 22 2.4 跌倒防護裝置... 23 2.5 小結... 24 三、研究方法... 27 3.1 量測與分析參數... 28 3.2 實驗設備... 29 3.2.1 光學式動作擷取系統... 29 3.2.2 肌電訊號(EMG)量測設備與 LabVIEW 8.5... 29 3.2.3 跌倒模擬設備... 29 3.3 受測者... 31 3.4 實驗步驟... 32 3.4.1 實驗準備... 32 3.4.2 一般日常活動... 33 3.4.3 模擬絆倒... 373.5 數據處理與分析... 38
四、實驗結果... 41
4.1 日常生活動作與跌倒的肌電訊號(EMG)峰值之比較... 41
4.2 絆倒與日常生活動作肌電訊號(EMG)之差異... 43
4.3 慣性辨識門檻與肌電訊號(EMG)門檻的辨識速度比較... 45
4.4 肌電訊號(EMG)與加速度辨識的 Sensitivity 與 Specificity ... 49
4.5 日常生活動作誤判列表 ... 50
五、討論... 53
六、參考文獻... 62
表目錄
表 1 Population of fall (%) by age group. (Campbell, Reinken et al., 1981) .... 14表 2 跌倒辨識率指標:Sensitivity 與 Specificity ... 15 表 3 跌倒感測器比較簡表... 19 表 4 初步跌倒模擬實驗數據 (單位:秒) ... 25 表 5 日常生活與跌倒的平均 EMG 峰值之比較結果... 42 表 6 加速度、EMG 與使用兩者综合判別之辨識率與辨識速度列表... 49 表 7 各受測者日常生活動作之加速度誤判列表 (次數)... 50 表 8 各受測者日常生活動作之肌電訊號誤判列表 (次數)... 51 表 9 回顧之感測系統综合比較... 57
圖目錄
圖 1 防護氣囊裝置 (Shi, G, Chan, CS et al., 2006) ... 23圖 2 模擬絆倒裝置之繩套與護踝... 30 圖 3 實驗流程圖... 32 圖 4 執行日常活動實驗時動作擷取系統攝影機配置圖... 34 圖 5 受測者的反光式標記(reflective markers)設置... 35 圖 6 皮膚表面肌電訊號(EMG)貼片設置 ... 35 圖 7 絆倒與日常生活之肌電訊號(EMG)平均峰值長條圖 ... 43 圖 8 獨立使用肌電訊號門檻、加速度門檻之平均辨識時間 ... 46 圖 9 辨識成功累計比率分布圖... 47 圖 10 每 100 毫秒時間區間內之成功辨識百分比... 48 圖 11 跌倒現象之歸納整理簡圖... 58
一、前言
1.1 研究背景與動機 根據臺灣衛生署國民健康局與國家衛生研究院針對2003年臺灣地區中 老年身心社會生活狀況調查之成果報告(行政院衛生署國民健康局. 2006),與2005年國民健康訪問暨藥物濫用調查(財團法人國家衛生研究院. 2007)中顯示,臺灣地區六十五歲以上高齡人口過去一年之跌倒盛行率, 2003年與2005年之調查皆高達20%;此外,2005年高齡跌倒者當中高達 59.0%跌倒一次,17.7%跌倒兩次,19.3%跌倒三次以上,且將近一半的跌倒 意外發生於住家之中。依據行政院主計處2005年社會發展趨勢調查顯示: 65歲以上高齡人口最近三個月內的事故傷害類型,跌倒所佔的比例高達 72.8%。在國外對於高齡者跌倒盛行率之研究調查亦有相似之結果,每年有 將近30%之高齡者曾經跌倒,而有15%為經常性之高齡跌倒者(O'Loughlin, Robitaille et al., 1993; Tromp, Smit et al., 1998; Stel, Smit et al., 2003)。跌倒對於青壯年族群造成的傷害或許並非嚴重的問題,然而對於高齡族 群卻可能會帶來嚴重的肢體創傷與後遺症,例如:造成行動力下降、需要 輔助器具輔助高齡跌倒者行動。更嚴重的情況甚至可能造成高齡跌倒者癱 瘓,無法自由行動,必須額外聘請照護人員看護,增加社會資源的消耗(Nyan, M. N., Tay, F. E. H. et al., 2006)。除此之外,跌倒的發生不僅有可能造成高齡
族群生理上的傷害,也有可能帶來心理上的後遺症,使高齡跌倒者傾向於 減少日常活動或避免與外界交流以降低跌倒再次發生的風險(Scheffer, A. C., Schuurmans, M. J. et al., 2008),長久下來將會對高齡跌倒者的身心造成不良 影響。根據臺灣衛生署調查,1999 年至 2005 年中,經歷跌倒意外後害怕再 度跌倒的受訪者中,有將近六成藉由減少活動的頻率減低未來再次跌倒的 風險。這些資料顯示跌倒對於高齡族群是一不可輕易忽視的威脅(蔡益堅等. 2007)。2008 年內政統計通報的資料顯示,至 2007 年底止,我國 65 歲以上 之高齡人口計234 萬 3 千人,占總人口比例 10%以上,且呈現逐年上升之 現象,與國際間眾多高度工業化國家相似。臺灣此一高齡人口比例雖較歐 美及日本等已開發國家低,但較亞洲之其他國家為高(臺灣內政部統計處. 2008)。隨著臺灣社會高齡化的普及和人口的增長,醫療照護的資源將會越 來越難以應付日趨龐大的需求。於此高齡化以及醫療資源壓力日漸攀升的 背景下,致使本研究開始關注兩個深切相關的主要目標: 從積極避免跌倒的觀點出發,希望營造出合適的環境以積極減少高齡人口 跌倒的發生(Yang, Bing-Shiang and Hu, Hsin-Yun. 2008; Yang, Bing-Shiang, Hu, Hsin-Yun et al., 2009)。然而跌倒的風險因素尚有許多與年齡增長導致身 體機能退化的相關因素,無法完全藉由改善環境克服(Sheldon, J. H., 1960; Campbell, A. J., Reinken, J. et al., 1981; Blake, A. J., Morgan, K. et al., 1988; Wickham, C., Cooper, C. et al., 1989; Pluijm, S. M., Smit, J. H. et al., 2006)。因 此,希望減少跌倒對高齡人口造成的傷害,並不能完全仰賴環境的改善。
而與積極改善生活環境以防範跌倒相呼應的另一重要目標,即是在高齡人 口跌倒發生後,跌倒傷害發生前,關鍵時間內判斷跌倒的發生並且藉由其 他輔助防護裝置,例如:安全氣囊(Wu, G and Xue, S; Fukaya, K. 2002; Shi, G, Chan, CS et al., 2006; Fukaya, K and Uchida, M. 2008),於使用者發生跌倒時 充氣,使髖關節(hip joint)等重要部位得到適當的防護。而達成此重要目標 ─「及時防護」的首要步驟即是建構一迅速且可靠的跌倒辨識系統。
因此,本研究希望能夠經由研究人體運動學及肌肉特性,增進感測系統 對於跌倒的辨識能力與感測速度,提升「及時防護」目標之可行性,降低 高齡者跌倒傷害的嚴重性與發生率。
1.2 研究目的 因應高齡化社會的到來以及跌倒風險的威脅,本研究希望能夠對於跌倒 有更深入的防護與分析,預期結合由加速規(accelerometer)等慣性感測器以 及肌電訊號(electromyography, EMG)可以建構一新型的跌倒感測系統與跌 倒辨識標準,達成迅速且正確的跌倒辨識。因此,本研究之目的為評估肌 電訊號(EMG)在跌倒感測系統領域之適用性,並且希望能夠結合肌電訊號與 慣性感測器辨識跌倒的發生。 根據此一目標,綜合比較各種可做為動作擷取之元件的相關文獻,顯示 由加速規之慣性系統適合作為一般居家環境中簡單量測與判定人體活動的 感測器(Bouten, C. V. C., Koekkoek, K. T. M. et al., 1997; Aminian, K., Robert, P. et al., 1999; Mathie, M., 2003)。而本研究考量實驗數據之取得、不同儀器 之同步擷取、取樣頻率以及準確度,將會以光學式動作擷取系統之反光標 記模擬加速規所能取得之加速度資料。本研究希望開發此系統來辨識或解 析跌倒發生時的運動學狀態或特徵,藉由將此系統裝置在使用者身上,除 了可以作為跌倒感測器即時防護跌倒的發生,在未來此研究完成後追加資 料記錄功能,亦可以蒐集跌倒發生前後的所有運動學資料,作為日後對於 跌倒領域更深入的研究與追蹤評估跌倒風險之用。 評估肌電訊號(EMG)應用在跌倒辨識領域的適用性是本研究之主要目 標。肌電訊號是用以評估肌肉運動的重要指標,在人體欲進行動作時,由
大腦發出的訊號導致肌纖維內外離子濃度不均衡而產生肌肉收縮,即是所 謂的肌電訊號。一般而言,人體自主之動作應是先由大腦產生神經電訊號 促使肌肉收縮進而產生動作;反射機制(reflex)則不須經由大腦,可以產生 較自主動作迅速的肌電訊號反應。而人體在不預期失去平衡之情況下可能 會藉由反射機制或自主補償動作(voluntary compensatory movement),亦或兼 具兩者之機制產生回復平衡動作。所以本研究使用可能含有上述機制之肌 電訊號作為判斷跌倒辨識的參數,能夠快於使用速度與加速度等慣性資料 作為跌倒判斷門檻(threshold,當訊號超過門檻即判斷為跌倒,若無則判斷 為日常生活動作或其他情況)的辨識速度。而整合使用加速規以及肌電訊號 作為一隨身的動作感測器將可以提供更迅速與完善的跌倒辨識。
二、文獻回顧
2.1 跌倒相關研究 2.1.1 跌倒的定義
根據Shumway-Cook 與 Woollacott 著作之 ”Motor Control: Translating
Research into Clinical Practice” (2006)一書,在臨床上,跌倒通常定義為患者 跌落於地面,或是被發現躺在地面,除此之外也常被定義為不預期的接觸 到支撐面(supporting surface),如桌面或牆壁。而在研究領域,為了受測者 的安全考量,跌倒實驗通常以模擬的方式進行,並且以護具、軟墊及吊帶 保護受測者。在實驗方法的部份,舉例來說可能以移動受測者所站立的支 撐面,使受測者產生模擬跌倒(滑倒)的反應。在此情況下,跌倒的發生可 以定義為受測者的質心(center of mass)離開 base of support 的邊界導致受測 者失去平衡(Pai, YC and Iqbal, K. 1999; Maki, BE and McIlroy, WE. 2006) 。
2.1.2 跌倒的風險因子
目前已經有相當多的研究投入於調查與分析可能導致跌倒的影響因 素,其中包含:性別、年齡、肌肉力量、感覺受器衰退、感覺運動功能 (sensorimotor function)之影響、移動力、使用之輔助器材、過去曾有過的跌 倒經歷、慢性疾病、日常動作能力、藥物、環境與其他因素(Sheldon, J. H., 1960; Campbell, A. J., Reinken, J. et al., 1981; Blake, A. J., Morgan, K. et al.,
1988; Wickham, C., Cooper, C. et al., 1989; Pluijm, S. M., Smit, J. H. et al., 2006)。研究發現特定藥物的混合使用將會增加跌倒的風險,例如抗憂鬱與 降低血壓藥物的混合使用(Blake, A. J., Morgan, K. et al., 1988)。環境因素包 括採光影響視線、障礙物、地面摩擦力等。上述研究也發現性別將會影響 高齡族群的跌倒盛行率,年長女性發生跌倒的比例高於年長男性。
在感覺運動功能(sensorimotor function)的部份,Lord 與 Ward (1994)之
研究,對總共550 位高齡與年輕之受測者施行視覺、前庭平衡、感覺運動 功能、平衡功能的實驗。感覺系統、運動系統與平衡系統之測試結果,皆 隨著年齡改變有顯著差異。根據分析之結果,在一般的情況下,下肢的感 知能力為一重要的運動感知因子;而在更具挑戰性的平衡條件下,肌力、 反應時間與前庭(vestibule)功能則扮演更重要的角色。研究感知系統與視覺 能力對控制軀幹晃動(body sway)與平衡之貢獻,發現受測者較依賴視覺控 制平衡,而65 歲以上之高齡族群由於視覺能力的衰退將導致軀幹晃動之範 圍增加。 2.1.3 年紀與性別對跌倒盛行之影響 延續上述風險因素,根據研究調查之結果,年齡和性別與跌倒之發生具 有顯著相關(Campbell, AJ, Reinken, J et al., 1981; Blake, AJ, Morgan, K et al., 1988; O'Loughlin, JL, Robitaille, Y et al., 1993; Schultz, A, Ashton-Miller, JA et al., 1997)。而可能造成高齡者較易意外跌倒之原因包含:視覺衰退、前庭
(vestibule)功能異常、反應時間與神經系統遲緩、肢體肌肉與機動力(mobility) 之衰退(Manchester, D, Woollacott, M et al., 1989; Judge, JO, King, MB et al., 1995; Lord, SR, Lloyd, DG et al., 1996)等,以及前述所提及之跌倒風險因 子。這些生理衰退皆影響平衡之表現,例如視覺可以提供神經與認知系統 獲知環境內的資訊及危險源,研究顯示當人體閉上眼睛遮斷視覺站立時, 軀幹的晃動(body sway)相對於視覺未遮斷時,將增加 20%到 70%(Paulus, WM, Straube, A et al., 1984),顯示視覺能力與平衡息息相關。而這些生理機
能皆可能隨著年齡的提升而衰退,例如isometric muscle strength 一般約於二
十五歲到達最大值後逐漸降低,且約於六十五歲時降低至年輕時最大值的 三分之二(Cathcart, EP, Hughes, DER et al., 1935)。
在性別差異方面,上述肌力因素,成年女性之肌力通常約為成年男性的 三分之二(Schultz, AB. 1992)。關節力矩到達最大值之速率也是一個重要的 平衡相關生物力學參數,研究發現高齡女性的腳踝關節力矩到達最大值的 速率低於高齡男性(Thelen, DG, Schultz, AB et al., 1996)。同時,Thelen et al. 也發現關節力矩之速率與關節最大之力矩強度呈現高度相關之關係。
上述這些因素可能是造成年長女性相較於年長男性於平衡受到干擾時 較不易回復,或是較不容易避免跌倒之原因。
2.1.4 跌倒後之回復反應 (fall recovery) 一般人的平衡受到干擾之後,通常必須在三百到四百毫秒(Chen, HC. 1993)的短時間內藉由關節產生的力矩與運動回復平衡(Thelen, DG, Schultz, AB et al., 1996),如利用軀幹的擺動或使用下肢向前跨步(Luchies, CW, Alexander, NB et al., 1994)。然而關節之力矩卻未必能在如此短的時間內到 達最大值,因此除了最大肌力,關節力矩之最大值與產生時間可能也是影
響藉由跨步回復平衡的重要因素。上述Thelen, Schultz et al. (1996)之研究結
果發現:高齡者隨著生理的衰退,關節力矩需要耗費較多的時間達到指定 的力矩大小。
根據此研究結果,Thelen, Wojcik et al. (1997)假設隨著年齡的衰退,將 會降低高齡者藉由跨步回復平衡的能力。實驗藉由將高齡受測者與年輕受 測者之腰部以纜繩繫住,使其往前傾倒一固定角度後釋放纜繩,藉此評估 高齡受測者與年輕受測者藉由跨步回復平衡的能力。實驗結果顯示,在小 傾斜角度時高齡族群與年輕族群之結果相似;然而於最大傾斜角度時,高 齡族群成功藉由跨步以回復平衡之結果顯著小於年輕族群。此一結果證實 隨著年齡提升造成的生理衰退,將會降低高齡族群在失去平衡時,藉由跨 步回復平衡的成功率。Wojcik, Thelen et al. (2001)也發現隨著傾斜角度增 加,受測者也會以較大的膝蓋與髖關節(hip joint)運動範圍應對,且無論年 輕或著高齡之受測者通常會以最大之關節力矩嘗試回復平衡。因此,高齡
人口能否在跌倒之後關鍵的三百至四百毫秒短時間內,藉由身體軀幹及四 肢輸出合適的反應,將是避免嚴重跌倒傷害的關鍵因素。
在不同年齡族群使用的回復策略方面,除了上述所說之力矩展開速度與 大小差異外,高齡族群可能較為仰賴髖關節的運動以控制姿勢的穩定性, 而年輕族群則可能較依賴腳踝關節之運動(Okada, S, Hirakawa, K et al., 2001)。
Horak (2006)將回復平衡之策略整理為腳踝策略(the ankle strategy)、髖關 節策略(the hip strategy)、跨步(take a step)三種模式,其中前二項策略之腳步
不改變,而後者藉由跨步或抬手等方式改變base of support 之範圍(Horak,
FB. 1987; McIlroy, WE and Maki, BE. 1996)。腳踝策略(the ankle strategy),在 可靠穩固之站立平面將腳踝當作倒單擺之固定支點以維持身體平衡,應對 小範圍之軀幹晃動(body sway)。髖關節策略(the hip strategy),利用髖關節之 力矩迅速改變身體之質心,通常用於站立之平面不允許使用腳踝策略或需 要快速改變質心之情況。跨步(steping)則為行走中常見之回復平衡策略。Eng, Winter et al. (1994)將跨步的模式分為 elevating strategy 與 lowering strategy。
在elevating strategy 的部份,跌倒者在 swing phase 中受到障礙物阻礙之下
肢將會嘗試以升高下肢的方式克服(跨過)障礙物以繼續進行中的步態;而 lowering strategy 則是讓受到障礙物阻礙之下肢保持在障礙物之後,藉由未 受阻礙之下肢克服障礙物以回復平衡。
除了前後向的跨步之外,在失去平衡時有效的控制質心側向的運動也是 一個影響回復平衡動作重要的因素。研究顯示,側向的穩定性與跌倒風險 有相當之關係(Maki, BE, Holliday, PJ et al., 1994; Lord, SR, Rogers, MS et al., 1999)。且側向之跌倒也較容易導致髖關節骨折(Hayes, WC, Myers, ER et al., 1993; Nevitt, MC and Cummings, SR. 1993; Cumming, RG and Klineberg, RJ. 1994)。Rogers, Hedman et al. (2001)研究對年輕成人、高齡跌倒者與高齡且 未有跌倒經歷的三種受測族群,使用馬達系統與繩套隨機出力,從受測者 腰部進行前後向的平衡干擾,使受測者產生跨步。結果顯示高齡跌倒者相 較於其他受測者顯著在跨步側方向有較多的身體移動以及側向跨步。
在回復平衡反應的起始時間方面,Pijnappels, Bobbert et al. (2005)之研究
指出:支撐腳的肌電訊號(EMG)之起始反應與峰值約在跌倒發生後之 200 毫秒內。且模擬滑倒(slip)實驗之研究亦得到相似之結果(Hughes, M. A., Schenkman, M. L. et al., 1995; Marigold, D. S., Bethune, A. J. et al., 2003; Sakai, M., Shiba, Y. et al., 2008)。Chen, Ashton-Miller et al. (1994)使用虛擬光 柵(virtual light band)模擬障礙物之出現,藉由改變障礙物出現之時機,研究 受測者反應時間是否充足以克服(跨過或及時停止)虛擬光柵障礙。其結果顯 示,供受測者反應之時間越長,受測者將越容易克服忽然出現之障礙。顯 示當平衡受到干擾時,能夠反應之時間長短亦為平衡回復動作成功與否的 重要因素。
2.1.5 跌倒後之應對策略 (fall strategy)
DeGoede and Ashton-Miller (2002)研究受測者向前跌倒時雙手與地面接 觸時的衝擊力峰值,並且在實驗前要求受測者以三種不同的指示行動:(1) 自然的跌倒與接觸,(2)盡可能的保持頭部離地越遠越好,(3)盡可能的降低 手部會受到的衝擊力。實驗結果證實受測者手腕受力的峰值相關於跌倒衝 擊發生時手肘的角度與手腕速度,顯示受測者在跌倒發生時可以藉由選擇 不同的策略改變手腕部位受力的最大值,以避免手腕骨折或其他嚴重傷 害。相關於此結果,DeGoede and Ashton-Miller (2003)模擬跌倒時的上肢應 對策略與女性年齡造成的肌力衰退,結果顯示隨年齡增長的上肢肌力衰退 可能會影響跌倒時上肢防護策略的實行,而缺乏實行這些防護策略的能 力,將會提升軀幹或頭部發生撞撃的風險。 髖關節骨折為跌倒可能對高齡人口造成的眾多傷害中最嚴重的傷害,輕 則可能導致高齡跌倒者需要複雜的手術與復健,重則使其癱瘓。在美國因 為髖關節骨折而住院者,大約一半無法恢復原本活動機能之水準(Stevens, JA and Olson, S. 2000)。髖關節與跌倒風險相關的研究指出:高齡人口側向 的跌倒相較於其他方向的跌倒將會導致髖關節骨折的機率提升約三到五倍 (Nevitt, MC and Cummings, SR. 1993; Greenspan, SL, Myers, ER et al., 1994; Greenspan, SL, Myers, ER et al., 1998; Schwartz, AV, Kelsey, JL et al., 1998)。 另外,跌倒導致髖關節直接的撞擊或撞擊發生在髖關節附近也會大幅的提 升髖關節骨折的風險。綜合上述結果,高齡者於跌倒發生時應該盡量避免
髖關節直接的發生撞撃,以避免嚴重的跌倒傷害。
因此,教育與訓練高齡人口跌倒發生後的應對策略,包括以手部維持彈 性的保護軀幹、頭部,以及髖關節的保護、避免直接撞擊,培養高齡人口 持續運動的習慣、訓練四肢的肌力將有助於減低嚴重跌倒的相關傷害產生。
2.1.6 模擬跌倒的形式
Smeesters, Hayes et al. (2001)研究關於不同步伐速度與造成跌倒的方 式,對跌倒的方向與骨盆撞擊位置的影響,歸納可能跌倒的方式建立了四 種跌倒模型,分別為暈眩(faint)、滑倒(slip)、踩空(step down)與絆倒(trip)。 目前的模擬跌倒之研究通常可歸納於此四種模型或其調整型。如暈眩常以 受測者自主模擬暈眩的發生,在身體盡量不出力的情況下讓身體由站立傾 斜倒下至護墊;滑倒以不預期的移動受測者所站立的支撐面來模擬;踩空 則可將受測者行走之走道設置凹陷之機構,並且予以掩飾使受測者無法察 覺,進而模擬踩空;絆倒以走道上隱藏之拘束機構,於受測者行走經過時 不預期出現,拘束受測者之行進腳步使其模擬絆倒之發生。 研究結果顯示步伐速度與造成跌倒方式對於撞擊位置及方向有顯著影 響。絆倒與踩空通常無論步伐的速度皆容易造成前向的跌倒與撞擊,而在 快速的步伐速度時滑倒與暈眩一樣傾向於前向跌倒與撞擊;當步伐速度降 低時,滑倒則容易導致側向、後向的跌倒以及臀部的撞擊,暈眩則大多數 為側向跌倒。除此之外,高達一半以上的跌倒撞擊速度都落在可能會使高
齡人口股骨骨折的範圍內,顯示無論哪一種跌倒方式都會對於高齡人口的 身體安全造成相當的風險與威脅。
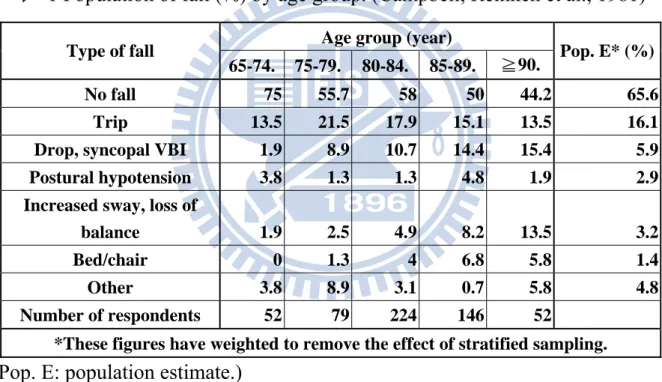
根據Campbell, Reinken et al. (1981)的研究調查發現:在 553 位高齡跌倒
經驗者中,絆倒(trip)的發生佔了最高的比率,如下表 1 引用自 Campbell, Reinken et al 著作 ”Falls in old age: a study of frequency and related clinical factors” 之 Table I,表中整理不同跌倒類型與不同年齡族群之跌倒盛行率:
表 1 Population of fall (%) by age group. (Campbell, Reinken et al., 1981)
Age group (year) Type of fall
65-74. 75-79. 80-84. 85-89. ≧90. Pop. E* (%)
No fall 75 55.7 58 50 44.2 65.6
Trip 13.5 21.5 17.9 15.1 13.5 16.1
Drop, syncopal VBI 1.9 8.9 10.7 14.4 15.4 5.9
Postural hypotension 3.8 1.3 1.3 4.8 1.9 2.9
Increased sway, loss of
balance 1.9 2.5 4.9 8.2 13.5 3.2
Bed/chair 0 1.3 4 6.8 5.8 1.4
Other 3.8 8.9 3.1 0.7 5.8 4.8
Number of respondents 52 79 224 146 52
*These figures have weighted to remove the effect of stratified sampling.
(Pop. E: population estimate.)
Roudsari, Ebel et al. (2005)與 Berg, Alessio et al. (1997)的研究得到相同結 果,絆倒(trip)之盛行率約 60%。在 Blake, Morgan et al. (1988)的研究調查中,
2.2 跌倒與日常生活動作辨識 2.2.1 跌倒辨識
在開始回顧跌倒或動作辨識系統之前,首先必須介紹感測器關於跌倒辨
識準確率的兩個重要指標Sensitivity 與 Specificity 於下表 2:
Sensitivity 的計算方式為(I)/[(I)+(II)],而 specificity 則為
(IV)/[(III)+(IV)]。Sensitivity 的意義為:跌倒實驗被正確辨識為跌倒的比例,
而specificity 則為日常動作實驗被正確辨識為非跌倒的比例。
表 2 跌倒辨識率指標:Sensitivity 與 Specificity
(圖中標記:「Actual Condition +」表示跌倒,「Actual Condition -」表 示為日常生活動作;「Test Result +」表示辨識為跌倒,「Test Result -」 表示辨識為日常生活。)
目前已經有相當的人體動作研究或是跌倒辨識方法使用慣性門檻辨識 跌倒的發生,在此整理這些跌倒辨識文獻如下:
Wu (2000)研究一般日常活動與絆倒、前向與後向跌倒時的數據資料, 發現一般活動的情況下軀幹的水平速度與垂直速度會控制在一定範圍內 (約1m/s),且通常只有水平或是垂直其中一個方向的速度增加幅度較大。 反之,跌倒時水平與垂直速度會同時劇烈增加為一般活動的二到三倍,且 通常發生於跌倒結束前約400 毫秒。Wu 認為此特性將可以作為一跌倒辨識 之門檻。
在使用加速規作為感測器的部份,Noury, Barralon et al. (2003)使用雙軸 加速規放置於受測者腋下作為傾斜計以量測矢狀面方向(sigittal plane)傾斜
角度α 與傾斜角速度 dα/dt。以角度判定 α 屬於站立、彎腰、平躺中的何種
姿勢以及傾斜速度dα/dt 屬於慢速、中等、快速的速度層級,最後以初始和
結束階段的姿勢與過渡階段的速度層級作為判別動作的標準。如 ”Standing - high speed - lying” 可能為跌倒發生,而 ”Standing - medium speed - lying” 則可能為躺下的動作。所進行的日常生活動作為:受測者坐到床上後躺下、 行走、彎腰、雙膝跪地、坐椅子與從坐到站立;模擬跌倒實驗由受測者自 主進行前向傾倒、後向傾倒、坐下後躺下等各項動作於防護厚墊上。模擬
跌倒的實驗結果:sensitivity(將跌倒正確辨識為跌倒)為 79%,specificity(將
日常生活正確辨識為非跌倒)為83%。
Diaz, Prado et al. (2004)同樣使用三軸加速規,但放置於人體腰部高度
判別為非日常活動。實驗則分為衝擊實驗與一般日常活動的實驗,一般活 動包含慢速行走、中等速度行走、快速行走、上樓梯與下樓梯等五種動作; 衝擊實驗則包含原地垂直跳躍、曲膝跌倒、從五十公分處水平翻落,且地
面分為軟硬材質。進行模擬實驗結果sensitivity(將跌倒正確辨識為跌倒)為
100%,specificity(將日常生活正確辨識為非跌倒)為 92.5%。
Bourke, O’Brien et al. (2007)則使用三軸加速規設置於前胸與大腿量測 受測者從站立往前向、後向、左側與右側向跌倒,並且分為大腿伸直與彎 曲,總共八種跌倒模式。而日常生活則進行從有扶手的椅子站起與坐下、 無扶手椅子站起與坐下、在床上從坐到躺與從躺到坐、行走十公尺、進出 車輛座位…等動作。受測者分為十名年輕受測者進行模擬跌倒實驗以及十 名高齡受測者進行日常生活實驗。所訂立之加速度門檻值:胸部3.52g、大 腿2.74g。進行模擬跌倒實驗得到不同日常生活的 specificity(將日常生活正 確辨識為非跌倒)與sensitivity(將跌倒正確辨識為跌倒)皆為 100%,且置於 胸部的加速規辨識率優於大腿。
在使用陀螺儀作為跌倒感測器的部份,則有Nyan, Tay et al. (2006)使用
雙軸陀螺儀研究後向、側向跌倒與一般日常活動的差異,陀螺儀貼於前胸、 前腰、右下臂。日常動作的部份從坐姿開始依序進行:從椅子上站立、行 走五秒、彎腰撿起地上物品、行走八秒、坐到床上、躺下、從床上坐起、 從坐姿到站立、行走回椅子並且坐下。在模擬跌倒實驗的部分使用一可以
利用氣壓推動的平台讓受測者站立其上產生不平衡跌倒於厚墊上,歸納其 跌倒模型為滑倒。經由受測者進行一般日常動作與跌倒實驗並且將數據統
計分析之後,訂立前胸的角速度門檻值為130°/s、前腰為 100°/s、右下臂則
為170°/s。以上述門檻值進行跌倒模擬實驗,sensitivity(將跌倒正確辨識為
跌倒)為100%,而 specificity(將日常生活正確辨識為非跌倒)為 84%。除此
之外,Nyan, Tay et al.也量測此感測方法從感測器辨識跌倒的發生,直到受 測者與地面接觸的時間(稱之為 lead time)約為 200 毫秒。
在進行上述研究之後,Nyan, Tay et al. (2008)改進 2006 年的辨識方法, 藉由判斷軀幹與大腿日常活動與受測者模擬暈眩自主跌倒時角速度的一致
性來判別跌倒的發生與否。最後的結果得到100%的 specificity(將日常生活
正確辨識為非跌倒)與100%的 sensitivity(將跌倒正確辨識為跌倒),同時
lead time 也提升到最高 700 毫秒。
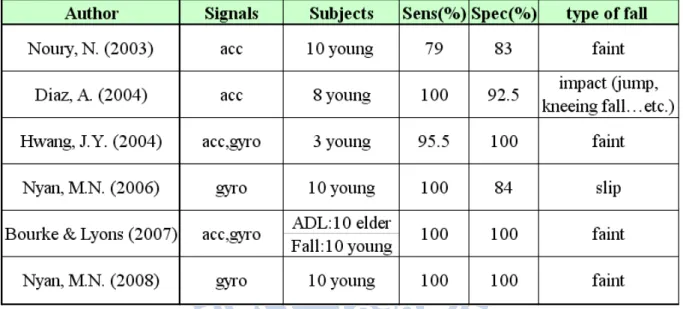
Hwang, Kang et al. (2004)同時使用加速規與陀螺儀置於受測者胸部,進 行前向、側向、後向的受測者自主跌倒以及行走與從坐到站的實驗,達成 了95.5%的 sensitivity(將跌倒正確辨識為跌倒)與 100%的 specificity(將日常 生活正確辨識為非跌倒),然而受測者數量只有三人以及日常行動的選擇只 有行走、坐、站三種動作為其主要限制。 本文將上述回顧之感測器辨識結果與實驗使用之跌倒類型依年份順序 列於表 3。由表可以發現,目前已經可以利用慣性感測器,在實驗室環境
中獲得相當的辨識率。且較多的模擬跌倒方式為受測者由站立自主模擬暈 眩後自由落體跌倒於防護軟墊,以及讓受測者站立於平台並且不預期的使 平台移動,導致受測者失去平衡的模擬滑倒方式。
表 3 跌倒感測器比較簡表
(acc: accelerometer, gyro: gyroscope, Sens: sensitivity, Spec: specificity, ADL: activities of daily living.)
在確認成功可採用之模擬跌倒的發生方面,據前述文獻回顧「2.1.5 跌 倒後之應對策略」小節,不同之模擬跌倒方式將會影響受測者使用不同的 跌倒回復策略以應付跌倒的發生(Horak, FB. 1987; Horak, FB. 2006)。因此, 不同模擬跌倒實驗需要依據可能之跌倒反應策略,定義成功模擬跌倒之條 件。一般來說,使用移動支撐面方式造成模擬滑倒,或是受測者自主假裝 暈眩的情況,可能會以受測者身體軀幹或大腿傾斜的角度(Nyan, MN, Tay,
FEH et al., 2008)以及受測者身體倒下與防護軟墊的接觸,作為成功模擬跌
倒發生的確認、或是如同Mathie (2003)藉由研究日常生活上半身的運動範
圍確認成功模擬跌倒的發生。而在較複雜的模擬絆倒實驗中,除了同樣以 受測者身體角度以及肢體與防護墊接觸以外,也有以懸吊防護裝置於受測 者向前傾倒時所撐起受測者的體重百分比或是以目視判定受測者是否由懸 吊防護裝置支撐體重的方式(Pijnappels, M, van der Burg, JCE et al., 2008)確 認何者為成功之模擬跌倒。 在決定門檻值的部份,若是將門檻值定的太低容易產生日常活動被誤判 為跌倒的情況,即specificity 降低。可能導致所使用的防護裝置如安全氣囊 (Fukaya, K. 2002)於誤判之後啟動,將可能會造成使用者的困擾與徒增器材 消耗。而門檻值太高則可能造成較低的sensitivity,代表使用者有發生跌倒 但是感測器沒有辨識出跌倒的情形提升,降低感測器的周全性。因此,如 何合適的制定門檻值與演算法以使感測器具有完美的sensitivity 與 specificity 也成為感測器從跌倒模擬實驗進入實際應用的重要課題。
2.2.2 日常生活動作辨識
在人體動作辨識的部份則有較多的研究同時使用陀螺儀與加速規,例如 Najafi, Aminian et al. (2003)便結合加速規與陀螺儀為一感測器並放置於胸 前量測。藉由重力加速度、加速規的量測結果及判斷動作的演算法來區別 一些日常動作(站、坐、走、躺),例如躺下的情況,垂直方向的加速規量
到的值近似於0g (m/s2);反之如果為坐或站則垂直方向會量到近似 1g (m/s2)
的加速度,躺下的狀況為側躺或仰躺則由水平加速規與重力加速度的夾角 判別。
而Vlasic, Adelsberger et al. (2007)則結合超音波、加速規與陀螺儀的混
合式感測器系統,以演算法(Extended Kalman Filter)結合加速規與陀螺儀量 測資料,再輔以超音波判定各感測器與接受器之間的距離做位置的判定, 藉由資料重建之後得到與受測者動作相當接近的成果。上述研究雖然不直 接辨識跌倒的發生,然而若能建立判斷一般日常生活的門檻值與演算法, 則跌倒應也能以相仿方式制定門檻值。
2.3 跌倒相關肌電訊號(EMG)研究
在人體失去平衡時會以手抓取臨近物體,或以手進行保護性的動作是人 體的重要保護機制,McIlroy and Maki (1995)利用肌電訊號(EMG)及動作擷 取系統,發現當受測者站立的平台快速移動使受測者發生不預期滑倒(slip) 時,肩膀的肌肉短時間內就開始活化,其時機與腳踝為了維護身體平衡而
快速反應的時間相當接近,且反應時間隨著平台移動速度改變,約為90 到
106 毫秒。Hughes, Schenkman et al. (1995)則使用肌電訊號(EMG)與動作擷 取系統觀察受測者站立的平台急速前進或後退時受測者下肢的反應,實驗 結果顯示這些下肢部位對於不預期滑倒(slip)的反應時間都在 100 至 200 毫
秒之間。除此之外,Marigold, Bethune et al. (2003)與 Sakai, Shiba et al. (2008)
於研究模擬滑倒實驗時人體肌肉的反應時間也約在100 到 200 毫秒左右,
Pijnappels, Bobbert et al. (2005)研究模擬絆倒(trip)實驗的結果同樣顯示人體
回復平衡反應之起始肌電訊號約在跌倒起始後60 毫秒至 100 毫秒間,而可
2.4 跌倒防護裝置
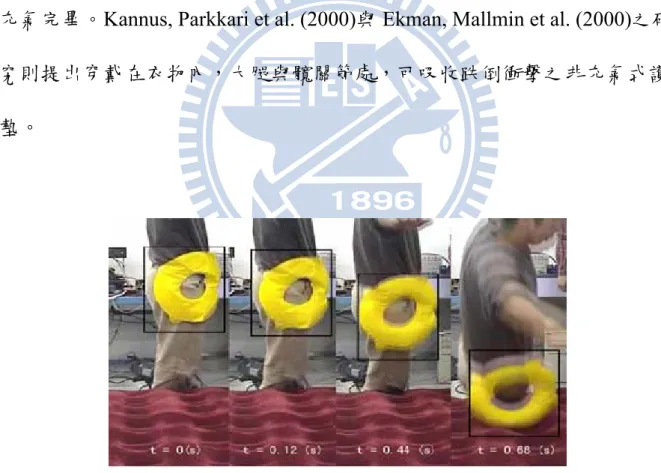
Fukaya (2002)的研究中提出夾克形式的跌倒防護氣囊裝置,包含充氣裝 置與氣囊,此夾克能夠在感測到跌倒後充氣以吸收跌倒撞撃時的能量。 Fukaya and Uchida (2008)同樣以夾克形式製作防護裝置,並且爲了因應:從 較高處落下、自輪椅上因急轉翻落、自行走高度跌倒三種情況而各自設計 了針對三種不同意外形式特化的氣囊防護裝置。Shi, Chan et al. (2006)設計
之防護氣囊裝置則穿戴於腰間,能夠在氣壓0.4Mpa 的條件下於 300 毫秒內
充氣完畢。Kannus, Parkkari et al. (2000)與 Ekman, Mallmin et al. (2000)之研 究則提出穿戴在衣物內,大腿與髖關節處,可吸收跌倒衝擊之非充氣式護 墊。
2.5 小結 目前跌倒感測器領域對於加速規的應用已有相當程度的研究,判斷跌倒 的加速度門檻值與辨識一般簡單日常動作的演算法也因應不同情況發展出 各式的方法;陀螺儀於跌倒判斷的應用雖然較晚起步,但是與加速規結合 量測將能使跌倒辨識的研究更進一步發展。肌電訊號則為神經與肌肉相關 科學領域的重要指標,通常用於解析人體動作、分析肌肉作動時機、使用 程度與效率。 然而,回顧目前跌倒感測器領域的研究,發現大部分的研究專注於跌倒 感測器的準確率,而且已經可以在受測者自主模擬暈眩的情況下獲得相當 優異的準確率。但是上述研究對於跌倒發生至跌倒感測器辨識出跌倒所需 的時間,以及受測者自主跌倒至軟墊上模擬暈眩(faint)以外的其他三種跌倒 模式:滑倒(slip)、絆倒(trip)、踩空(step down)卻較少為研究者所注目,而 此三者之中尤以盛行率最高,卻較少被研究的絆倒(trip)實驗之模擬令我們 感興趣。此外,上述所整理之跌倒實驗皆著重於已確認受測者失去平衡後 落下過程之模擬;然而現實生活中受測者遭遇到跌倒後,可能會藉由各種 反應嘗試回復平衡,而這些人體反應並非百分之百能夠避免跌倒的發生或 避免可能遭遇到的跌倒傷害。因此,本研究認為跌倒之模擬實驗不應停留 於已確認跌倒發生之落下過程,而應納入更大範圍的遭遇跌倒反應,如: 失去平衡後之跨步或移動四肢等試圖回復平衡之動作。
依據Mathie (2003)的研究,一般日常生活站立動作時上半身傾斜角度約 為20°左右,假定以此範圍界定為跌倒發生起始點而軀幹碰撞地面為跌倒結 束,並且以Wu 所發現之跌倒速度特性:「一般日常生活垂直面與水平面速 度約在1m/s 內」為跌倒發生的運動學辨識門檻。依上述文獻回顧之結果, 於本實驗室使用光學式動作擷取系統進行簡單的自站立高度落下至護墊的 模擬跌倒實驗。實驗數據附於下表 4。 表 4 初步跌倒模擬實驗數據 (單位:秒) Trial detecting time lead-time 02 0.280 0.452 03 0.300 0.404 05 0.304 0.460 06 0.388 0.536 07 0.328 0.580 08 0.636 0.480 09 0.252 0.576 10 0.336 0.504 13 0.256 0.436 14 0.240 0.556 Mean 0.332 0.498 Std. Dev. 0.116 0.062
(Detecting time 為自跌倒發生至偵測所需時間,Lead time 為自偵測至跌倒碰 撞所需之時間,Std. Dev.為 Standard deviation)
實驗1 為起始測試實驗故不採用、實驗 04 與實驗 11 數據為極大值與極
為自跌倒發生後至跌倒被判斷所需之時間,而lead-time 則為自跌倒發生被 感測器判斷後至受測者跌倒結束之時間。從數據結果可以得知,以速度特 性作為跌倒辨識門檻,從跌倒發生至跌倒判定平均所需時間約為330 毫秒。 此一結果顯示,若EMG 訊號反應時間約為 100 至 200 毫秒,則以 EMG 訊 號作為跌倒辨識門檻值,將可大幅增進跌倒辨識的速度。另外,本實驗進 行之自站立自由落下之lead time 約為 500 毫秒,若在行進中絆倒、滑倒或 是跌倒落下過程中,人體髖關節與家具撞擊等情況,皆有可能大幅縮短lead time 而導致防護裝置來不及啟動保護人體。 綜合上述,本研究認為結合慣性感測器與肌電訊號(EMG)判別跌倒的發 生,以及盛行率高的絆倒之模擬還有相當的研究空間,其中肌電訊號能夠 迅速判斷跌倒發生的可能性,是本研究關注的焦點。
三、研究方法
為了驗證肌電訊號(EMG)於模擬絆倒之跌倒感測的準確率與感測速 度,本研究使用動作擷取系統與肌電訊號量測裝置同步量測受測者在日常 生活動作與模擬絆倒的運動學資料與肌電訊號,並將量測所得之資料予以 比較。 在動作擷取方面,使用動作擷取系統可以精確取得人體在一般活動與跌 倒時運動學資料的差異。參照文獻回顧數個跌倒感測器的放置部位,如薦 骨(Diaz, A., Prado, M. et al., 2004)、軀幹脊椎處(Wu, G., 2000; Bourke, A. K., O’Brien, J. V. et al., 2007),以及四肢參考位置貼上反光式標記(reflective markers),並使用光學式動作擷取系統量測在一般日常活動(如:站、蹲、坐、 彎腰撿物)與模擬跌倒實驗時的運動學資料,並且同步量測肌電訊號 (EMG)。在完成實驗之後利用統計分析方法訂立日常生活與模擬跌倒的運動 學門檻與肌電訊號門檻,當訊號超過門檻即將其判定為跌倒,若無則判定 為日常生活動作。經確立跌倒辨識之門檻值後,便可以驗證此感測方法的 辨識能力與辨識速度。3.1 量測與分析參數 1. 同步量測受測者的肌電訊號(EMG)與光學式動作擷取系統之軀幹慣 性資料。 2. 分析肌電訊號在日常活動與跌倒之平均峰值(特徵值)是否有顯著 差異。 3. 以預訂之分辨日常生活動作與跌倒門檻值,計算慣性辨識與肌電訊 號辨識之辨識速度與辨識率。 4. 比較獨立使用慣性門檻辨識跌倒,與獨立使用肌電訊號門檻辨識跌 倒之辨識速度與辨識率,以及評估結合慣性系統與肌電訊號於跌倒 辨識領域之適用性。
3.2 實驗設備
3.2.1 光學式動作擷取系統
此研究使用之動作擷取系統為光學反射式動作擷取系統:BTS
Bioengineering SMART-D (BTS Bioengineering, Milano, Italy),擷取頻率: 250Hz,準確率:3×3×2 立方公尺的體積內小於 0.2mm 的誤差,解析度: 800×600 pixels。以六台動作擷取攝影機量測受測者的運動學資料。
3.2.2 肌電訊號(EMG)量測設備與 LabVIEW 8.5
肌電訊號量測系統(Bortec Biomedical, AMT-8 EMG system, 8 channels ,
Canada),用以量測人體動作時肌肉的作動時機與出力,採用表面肌電訊號
量測系統。EMG 貼片使用前須先將該部位剔除體毛並以肥皂或清潔劑清洗 之後再以去角質專用洗潔劑與酒精清理皮膚表面以確保擷取肌電訊號之品 質。
LabVIEW 8.5 (Laboratory Virtual Instrument Engineering Workbench, National Instruments, Texas, USA),由 National Instrument 公司開發的圖形介 面軟體,可供使用者依照需求自行開發及撰寫所需功能。用於擷取肌電訊 號(EMG)及實驗後數據的分析與處理。
3.2.3 跌倒模擬設備
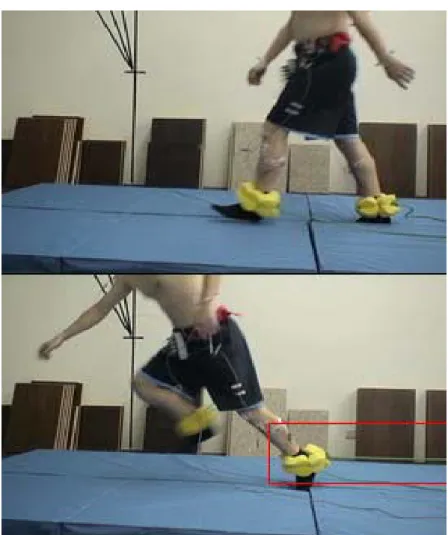
使用兩條登山繩以及海棉與護踝做成一繩套,用以拘束受測者的雙腳腳 踝,模擬受測者行走中跌倒的產生。下頁圖 2 為實際實驗中錄影之截圖。
肌電訊號(EMG)量測系統之前置放大器訊號線由透氣膠帶固定於皮膚表面 以便受測者自由行動。
圖 2 模擬絆倒裝置之繩套與護踝
3.3 受測者
受測者為12 名健康成年人,身高 174.8±4 公分,體重 76.1±13.7 公斤,
年齡23.3±1 歲。受試者在實驗前 6 個月內皆無下肢骨骼肌肉損傷之病史及
平衡感覺缺失(視覺、前庭損傷)、在受測前亦無下肢疼痛。同時排除一般 運動習慣以外受過特別加強平衡訓練的受測者。
3.4 實驗步驟 圖 3 為進行實驗儀器的設置流程,包含光學式動作擷取系統的校正、 將擷取系統所用的反光式標記以及表面肌電訊號(EMG)貼片貼於受測者,確 認可以正確量測得到訊號之後進行一般日常活動與模擬跌倒實驗量測受測 者運動學資料。待資料收集完畢後進行後續之統計分析與評估。 圖 3 實驗流程圖 3.4.1 實驗準備 實驗前需向受測者說明實驗流程及可能遭遇之狀況,經受試者同意並簽 實驗儀器設置、校正 擷取日常生活資料與 EMG 擷取跌倒資料與 EMG 統計分析 EMG 與運動學資料 感測系統辨識率與辨識速度 實驗結果評估
署實驗同意書後,方進行實驗。實驗中若受測者感覺身體不適,施測者應 立即中斷實驗,且該次實驗不納入數據分析。
3.4.2 一般日常活動
使用光學式動作擷取系統獲得受測者進行日常生活動作與模擬絆倒實 驗時,軀幹的運動學資料,如加速度,以便量化分析後可以藉由統計方法 取得區分日常生活動作(Activities of daily living, ADLs)與跌倒的門檻值,同 時以肌電訊號(EMG)量測系統量測跌倒時可能做動的肌肉之肌電訊號值與 活化時機。光學式動作擷取系統的攝影機架設於受測者的前方與後方各三 台,爲求有較好的資料擷取成果,每台攝影機的高度及拍攝受測者的角度 各不相同,以確保同一時間每一個反光式標記(reflective markers)至少能被 兩台以上攝影機拍攝、擷取資料。如圖 4,中間之長方區域為前後六台動 作擷取系統攝影機所建構之虛擬空間,受測者黏貼反光式標記後於此空間 之動作將會被動作擷取系統記錄。
圖 4 執行日常活動實驗時動作擷取系統攝影機配置圖
光學式動作擷取系統的反光式標記(reflective markers)主要黏貼於受測 者的頸椎第七節處(c7)與薦骨(sacrum)以量測軀幹之慣性資料,並且以薦骨 (sacrum)所量得反光式標記之加速度代表慣性感測器所得之訊號。此外還有 其他參考用之反光式標記,黏貼於:手腕兩側骨頭凸起處(styloid process of radius, styloid process of ulna)、手肘(elbow)、肩膀(shoulder)、腸骨前上脊 (anterior superior iliac spine, ASIS)、腳踝兩側,參照下頁圖 5。肌電訊號貼 片貼於受測者身體四肢於回復平衡動作中可能用到的肌肉,包括可能影響 跌倒時伸手扶物或倒下時撐地之上肢肌肉:三角肌(deltoid)、斜方肌 (trapezius),以及可能用於回復平衡動作的下肢肌肉:脛前肌(tibial anterior)、 腓腸肌外側(gastrocnemius lateralis)。身體左右兩側四個肌肉部位共八個貼 片,此四個部位肌肉都是靠近體表,較容易尋找位置以及量測肌電訊號的 肌肉群。貼片方向與肌肉纖維方向平行且貼於肌肉纖維中間處(軸向收縮方 動作擷取攝影機 建構之虛擬空間
向)之皮膚表面,參照下圖 6。肌電訊號之前置放大器訊號線將會以透氣膠 帶預留人體活動之自由度後固定於體表,以避免妨礙受測者自由活動。
圖 5 受測者的反光式標記(reflective markers)設置
在肌電訊號量測之前,必須先讓受測者按照規定的動作,進行各個肌電 訊號量測處之肌肉的最大自主收縮(Maximal Voluntary Contraction, MVC)肌 電訊號的量測,請受測者依序讓各量測部位的肌肉使出最大的出力維持六 秒並且紀錄大小,以便不同受測者間肌肉活化資料分析時之正規化。在進 行最大自主收縮動作的部份,量測三角肌的動作以受測者手臂平舉 (abduction),以外力固定受測者手肘後讓受測者出力抬手以收縮三角肌;肩 膀之斜方肌的量測動作以外力於肩膀處向下拘束受測者肩膀,並請受測者 以向上抬肩之動作收縮斜方肌;脛前肌,請受測者站立,以外力拘束腳背 前端,並進行以足踵(heel)為支點全力抬起足部之動作(dorsiflexion),以收縮 脛前肌;腓腸肌則請受測者坐於一椅,腳部向前伸直與軀幹成垂直,以外 力拘束足部前端,後請受測者伸展足部(plantarflexion),全力收縮腓腸肌。 待施測者下達口令後,請受測者依序在光學式動作擷取系統攝影機建構 出的虛擬空間中,由施測者亂數選取並指示受測者做出下列動作: 1.蹲下 2.由蹲下到站立 3.由站立到坐在無扶手的椅子上 4.從無扶手的椅子上起身 5.彎身撿地板上的物品 6.行走
每次實驗的每個動作受測者皆需要執行十次重複試驗,並且以光學式動 作擷取系統及肌電訊號成功量測資料為完成一次實驗。於各項動作執行實 驗前,施測者須先請受測者練習該項動作數次以使受測者的動作能夠自然 如同一般日常生活動作,若受測者自覺該次實驗動作不自然可以立即暫停 並且重複練習直至受測者覺得動作自然不窒礙。 3.4.3 模擬絆倒 使用上述的繩套分別繫於受測者的左右腳腳踝處,並且貼上反光式標記 (reflective markers)後,請受測者行走於覆有防護用軟墊之走道上。施測者 將會依照隨機抽取決定於受測者行走中利用繩套拘束住受測者的左腳或是
右腳,並於受測者行走抬腳時,swing phase 中之 initial swing(Perry, J. 1992)
階段固定繩索長度,使受測者因為腳踝被拘束而產生例如:跨步、跪下、 趴倒、抬手,諸如此類面臨意外絆倒可能出現的跌倒反應或是嘗試由失去 平衡中取回平衡的反應。定義成功之模擬絆倒試驗,分為跌倒與回復平衡 動作兩個部份,皆為具有跌倒傷害風險之可能情況。跌倒為受測者腳踝受 到拘束後膝蓋以上任一身體部位與防護軟墊接觸,而回復平衡動作包括: 腳踝被拘束後之另一隻腳跨步(定義超過平均步伐三個標準差或低於平均步 伐三個標準差、且此步之後無法繼續進行步伐稱之為跨步)、腳踝被拘束後 受測者爲保持平衡彎腰使上半身改變角度超過30 度(依據前述文獻回顧之 小結部份,Mathie (2003)研究之人體上半身日常動作角度變化通常於 20 度
以內,本研究考量訂為30 度)。此部分實驗將試驗行走總次數限制於四十 次,以隨機方式取得十次以上、二十次以下的成功模擬跌倒數據。
3.5 數據處理與分析
我們選用有限脈衝響應濾波器(Finite Impulse Response Filter)去除肌電 訊號中的雜訊。Moving average 演算法將會以一滑動之視窗一次讀入二十五 資料點,用此資料點之平均值取代這視窗之第十三點資料值。每移動一點 重複運算下一批進入視窗之資料。所有的肌電訊號數據將會以前述之最大 自主收縮(MVC)之 EMG 平均值正規化,以便進行不同受測者間肌肉活化程 度之比較。正規化過程以所量測得之六秒間肌肉自主收縮的肌電訊號,取 中間三秒之數據資料整流後計算平均值,並將各部位肌肉的所有量得之肌 電訊號除以各肌肉之MVC 平均值正規化。此正規化之過程將會由於量測 MVC 時不同量測動作的適用範圍,或是由於肌肉之反射機制,而導致正規 化後之肌電訊號資料具有超過100%之可能性,但此情況並不影響數據之相 對比較。 受測者每一次日常生活試驗的各部位肌肉之肌電訊號(EMG)將會被記 錄,並且以所有日常生活實驗的峰值計算出各肌肉在此日常生活動作試驗 中可以出力的平均最大峰值與標準差。各肌肉的平均值與標準差將會用以 訂立辨識日常生活與模擬絆倒之門檻值,即每一個受測者將會依照日常生 活實驗的表現針對八個肌肉分別設立八個門檻值。而門檻值的訂定標準則
為各肌肉群的日常生活肌電訊號峰值之平均加上2 倍標準差(此門檻訂定標 準為:經由測試平均值加數倍標準差為門檻後,以下述之方法辨識,並且 以95%以上之 specificity 為前提下,sensitivity 最高者選定作為各肌肉之門 檻訂定方式)。 在使用上述肌電訊號門檻分辨模擬跌倒與日常生活的方法部份,本研究 設定在兩百毫秒的時間區間內如果八個肌肉群中有任意三個肌肉的肌電訊 號超過預設的門檻值即判定為跌倒的發生。選擇任三個肌肉作為判斷標準 是爲了避免只以單一肌肉判斷,可能因為受測者單一肌肉持續的過度用力 或反射機制而導致訊號超過此門檻,而若以四個肌肉的肌電訊號超過門檻 才判定跌倒的發生,可能讓門檻過於嚴苛導致sensitivity 降低。 在慣性的門檻部分,本研究以量測所得之加速度代表常見之慣性感測器 (如加速規),爲sacrum 處反光式標記所擷取得到之總合加速度資料設置約 0.85g (m/s2)之加速度作為慣性資料的跌倒辨識門檻,門檻設定之選擇依據 同樣為:在95%以上的 specificity 前提下,能夠達到最高之 sensitivity。此 外,本研究設定慣性與肌電訊號有效判斷跌倒的時間區間為跌倒發生至發 生後的700 毫秒。此 700 毫秒之區間是依據 Nagata 與 Ohno (2007)使用一急 速滑動之平台與假人(dummy)模擬人體向後跌倒的落地時間之研究,得出假 人自實驗開始最快碰撞至地面的時間約為800 毫秒,本研究爲了安全之考 量,選擇700 毫秒定為跌倒發生後成功判定跌倒的區間。
在日常生活動作與絆倒的肌電訊號之比較,本研究將所有日常生活動作 及絆倒實驗之肌電訊號峰值依受測者八個肌肉各自平均作為日常生活動作 與絆倒實驗各肌肉之特徵值後,分日常生活動作與絆倒,依照受測者順序, 進行各肌肉之配對T 檢驗(paired T-test)。設定「*」為 p 值小於 0.01,「**」 為 p 值小於 0.001,以此方法比較兩種不同情況下之肌肉活化程度是否具有 顯著差異。
四、實驗結果
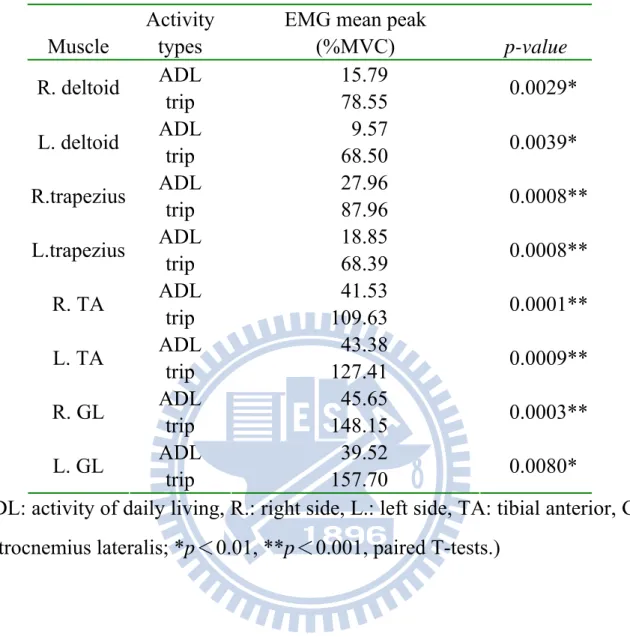
4.1 日常生活動作與跌倒的肌電訊號(EMG)峰值之比較 受測者八個肌肉所量測得到的EMG 訊號以 MVC 值正規化後,將各肌 肉之日常生活動作及絆倒實驗的肌電訊號峰值數據,各自取平均作為該肌 肉日常生活動作與絆倒實驗的特徵值。將日常生活動作與絆倒實驗的肌電 訊號特徵值,依序排列並進行比較,得到表 5 之結果。結果顯示八條肌肉 群皆有顯著差異(p<0.01, paired T-test),左右之斜方肌與右腳小腿之脛前肌 與外側腓腸肌具有特別顯著之差異(p<0.001, paired T-test),且於模擬絆倒時 之平均峰值皆大於一般日常生活之表現。表 5 日常生活與跌倒的平均 EMG 峰值之比較結果 Muscle
Activity types
EMG mean peak
(%MVC) p-value ADL 15.79 R. deltoid trip 78.55 0.0029* ADL 9.57 L. deltoid trip 68.50 0.0039* ADL 27.96 R.trapezius trip 87.96 0.0008** ADL 18.85 L.trapezius trip 68.39 0.0008** ADL 41.53 R. TA trip 109.63 0.0001** ADL 43.38 L. TA trip 127.41 0.0009** ADL 45.65 R. GL trip 148.15 0.0003** ADL 39.52 L. GL trip 157.70 0.0080*
(ADL: activity of daily living, R.: right side, L.: left side, TA: tibial anterior, GL: gastrocnemius lateralis; *p<0.01, **p<0.001, paired T-tests.)
4.2 絆倒與日常生活動作肌電訊號(EMG)之差異
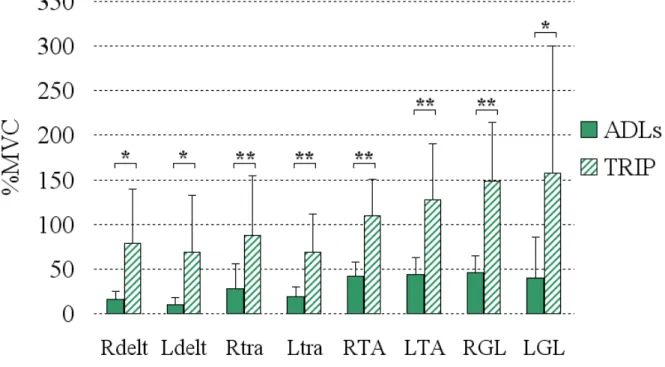
將上述結果之平均峰值繪製成長條圖。實心長條為日常生活動作實驗之 平均峰值,斜線長條為模擬絆倒實驗之平均峰值,峰值大小在縱軸以最大 自主收縮(Maximal Voluntary Contraction, MVC)之百分比表示,如圖 7。
圖 7 絆倒與日常生活之肌電訊號(EMG)平均峰值長條圖
(MVC: Maximal Voluntary Contraction, ADL: activities of daily living, L: left side, R: right side, delt: deltoid, tra: trapezius, TA: tibial anterior, GL:
gastrocnemius lateralis. *p<0.01, **p<0.001, paired T-tests.)
日常生活動作之肌電訊號平均峰值皆於50%MVC 以下;而在模擬跌倒
實驗時之訊號,上肢之平均峰值超過50%MVC,下肢則超過 100%MVC。
然適用實驗中可能出現之動作,以及反射機制爲了快速活化肌肉群產生的
大量肌電訊號所造成。然而此現象並不影響以MVC 正規化各受測者間比較
4.3 慣性辨識門檻與肌電訊號(EMG)門檻的辨識速度比較 在此以加速度訊號代表慣性感測器,從模擬跌倒實驗中取獨立使用肌電 訊號門檻與獨立使用加速度門檻,皆正確辨識出絆倒之實驗共133 組模擬 跌倒,以計算平均辨識速度。此處所指之辨識速度僅為加速度或肌電訊號 自跌倒發生至訊號達到跌倒辨識門檻之時間,不為實際之隨身感測系統辨 識跌倒所需要耗費之時間,實際之辨識速度仍須考量計算與傳輸等過程所 可能耗費之時間。 肌電訊號門檻辨識時間:平均161 毫秒,標準差 181 毫秒;加速度門檻 辨識時間:平均282 毫秒,標準差 130 毫秒。兩者數據經過比較,顯示肌 電訊號門檻辨識速度顯著快於加速度門檻辨識速度(p<0.01, paired T-test), 如下頁圖 8。
圖 8 獨立使用肌電訊號門檻、加速度門檻之平均辨識時間
(EMG only: 僅使用肌電訊號門檻辨識跌倒,Acc only: 僅使用加速度門檻辨 識跌倒。) 另外,本研究統計上述成功辨識之133 組模擬跌倒實驗,自跌倒發生至 跌倒後700 毫秒內,以 100 毫秒遞增的時間區間,累計截至該時間點前之 辨識成功次數,以累計比例(%)表示如下頁圖 9。橫軸為時間區間(ms),縱 軸為累計比率(%)。 Fall initiation *(P<0.01)
圖 9 辨識成功累計比率分布圖 獨立使用肌電訊號(EMG)門檻於跌倒發生後之 100 毫秒內可辨識出 133 組總絆倒實驗的53.4%(71 組絆倒實驗),於跌倒發生後的 300 毫秒內可辨識 出81.2%(108 組實驗),於跌倒後 500 毫秒內可辨識出 90%之絆倒。而獨立 使用加速度門檻於跌倒發生後之100 毫秒內僅辨識 133 組總絆倒實驗的 6%(8 組絆倒實驗),於跌倒後 300 毫秒內可辨識出約 61%(81 組實驗),同樣 約於500 毫秒內可辨識出 90%之絆倒。 此分析結果顯示,在跌倒可供反應時間越急促的情況下(如本研究之行 走中絆倒,或於居家環境中,跌倒落下過程中髖關節可能撞擊到傢俱之情 況),使用肌電訊號辨識跌倒較有安全考量上之優勢;但若跌倒者為自靜止 站立之高度跌落至地面(如暈眩),且無落下途中遭遇撞擊、具有較長反應時
間之情況,則肌電訊號門檻辨識與加速度門檻辨識兩者優勢相當。 再以上述之133 組肌電訊號門檻以及加速度門檻皆成功辨識之數據,呈 現自跌倒開始至700 毫秒時,每 100 毫秒之區間內成功辨識次數佔總實驗 次數之百分比,如圖 10。 圖 10 每 100 毫秒時間區間內之成功辨識百分比 此圖較直接呈現肌電訊號門檻辨識,以及加速度門檻辨識絆倒,於不同 時間區間辨識成功之分布趨勢,圖上方之肌電訊號門檻主要辨識區間為自 絆倒開始後的0 至 300 毫秒以內(累積約 80%總實驗次數),而加速度門檻主 要辨識時間區間則集中於自絆倒發生後的100 至 400 毫秒之區間(累積約 80%總實驗次數)。此處呈現之結果呼應上圖 9。
4.4 肌電訊號(EMG)與加速度辨識的 Sensitivity 與 Specificity 表 6 為使用不同感測參數之跌倒辨識率與辨識時間。Acceleration 表示 獨立使用加速度門檻辨識,EMG 表示獨立使用肌電訊號門檻辨識, Combined 則為以 OR 邏輯閘結合兩者共同辨識。Sensitivity 為模擬跌倒實驗 正確辨識為跌倒之比例,Specificity 則為日常生活動作正確辨識為非跌倒之 比例。Detecting time 為平均辨識所需之時間,定義為自跌倒發生到被感測 器辨識為跌倒之時間。 表 6 加速度、EMG 與使用兩者综合判別之辨識率與辨識速度列表
Acceleration EMG Combined
Sensitivity 87.76% 76.02% 95.92% Specificity 95.42% 99.30% 95.42% Detecting Time (ms) 282±130 161±181 135±120 (Combined:合併使用加速度門檻與肌電訊號門檻辨識跌倒,Detecting Time:自跌倒發生至跌倒辨識所需之時間。) 分析結果為加速度門檻辨識之sensitivity: 87.76%、specificity: 95.42%、 平均辨識時間282 毫秒。肌電訊號辨識之 sensitivity: 76.02%、specificity: 99.30%、平均辨識時間 161 毫秒。而合併使用加速度與肌電訊號辨識之結 果sensitivity: 95.92%、specificity: 95.42%、平均辨識時間 135 毫秒。結果顯 示結合兩者共同辯識絆倒之sensitivity,相較於獨立辨識具有相當之提升。
4.5 日常生活動作誤判列表 在日常生活動作實驗的部份,各項動作之實驗進行十次,十二位受測者 各自進行六種日常動作,共計720 個實驗數據。將使用加速度門檻辨識各 受測者之日常生活辨識結果列於表 7: 表中數字為各受測者進行日常生活動作實驗之誤判次數。Pick:站立原 地彎腰撿物,Sq2st:由蹲下到站立,Squat:由站立到蹲下,Walking:直線 行走,Si2st:由坐姿到站立,St2si:由站立到坐下。 表 7 各受測者日常生活動作之加速度誤判列表 (次數) Subject
ID pick sq2st squat walk si2st st2si
01 0 0 0 0 0 0 02 0 0 0 0 0 1 03 0 0 0 0 0 0 04 0 0 0 0 0 0 05 0 0 8 0 0 1 06 0 5 8 0 0 1 07 0 1 0 0 1 2 08 0 0 0 0 0 3 09 0 0 0 0 0 0 10 0 0 0 0 0 0 11 1 1 0 0 0 0 12 0 0 0 0 0 0 total 1 7 16 0 1 8
(pick: bending to pick an object, sq2st: from squat to stand, si2st: from sit to stand, st2si: from stand to sit.)
下、站立到坐下、蹲下到站立三者。列表之結果顯示:較多之誤判發生於 蹲下之動作,共計16 次;其次則為由站立到坐之動作,共計 8 次;再其次 則為由蹲下至站立之動作,共計7 次。720 組日常生活動作資料中,加速度 門檻辨識之specificity 為 95.42%。 將使用肌電訊號(EMG)門檻辨識各受測者之日常生活辨識結果列於表 8: 表 8 各受測者日常生活動作之肌電訊號誤判列表 (次數)
EMG pick sq2st squat walk si2st st2si
subject01 1 0 0 0 0 0 subject02 0 0 0 0 0 0 subject03 0 0 0 0 0 0 subject04 0 0 0 0 0 0 subject05 0 0 1 0 0 0 subject06 0 0 0 0 0 0 subject07 0 0 0 0 0 0 subject08 1 0 0 0 0 0 subject09 0 0 0 1 1 0 subject10 0 0 0 0 0 0 subject11 0 0 0 0 0 0 subject12 0 0 0 0 0 0 total 2 0 1 1 1 0
(pick: bending to pick a object, sq2st: from squat to stand, si2st: from sit to stand, st2si: from stand to sit.)
在使用肌電訊號之誤判部份,結果顯示在所有受測者中,各項日常生活 動作之誤判僅蹲、行走、由坐椅至站立各出現一次誤判,以及彎腰撿物出 現兩次誤判。720 組日常生活動作資料中,肌電訊號門檻辨識之 specificity
為99.31%。比較加速度門檻與肌電訊號門檻辨識日常生活動作之結果,可
五、討論
在上一章節之 4.1 與 4.2 中,以肌電訊號(EMG)之平均峰值作為各實驗 特徵值,根據比較之結果,模擬絆倒時各肌肉的肌電訊號峰值皆顯著大於 進行一般日常活動的肌電訊號峰值(p<0.01, paired T-test),此一結果顯示利 用肌電訊號(EMG)將跌倒從日常活動中分辨出來確實具有可行性。將此結果 畫成長條圖,可以發現若試圖將肌電訊號之貼片數量最佳(最小)化,雙腳之 脛前肌(tibial anterior)與外側腓腸肌(gastrocnemius lateralis)在日常生活與模 擬跌倒之肌電訊號峰值表現相差較大,應為較良好之選擇。而脛前肌與腓 腸肌之肌電訊號峰值差異較大之原因可能由於受測者在遭遇不預期之絆倒 時採用了「跨步」的回復平衡策略,從前述文獻回顧可以得知跨步之回復平衡策略可分為elevating strategy 與 lowering strategy(Eng, JJ, Winter, DA et
al., 1994),為了因應危急情況下不同策略之被拘束腳與跨步腳的動作,可能 因此提升脛前肌與腓腸肌的活化程度。然而從跨步的回復平衡策略而言, 若欲觀察進行跨步策略時之肌肉活化程度,則肌電訊號貼片位置應選擇以 大腿與髖部相關之肌肉作為觀測對象,本研究所選擇之脛前肌與外側腓腸 肌可能較適合作為針對ankle strategy 之研究應用。此肌電訊號貼片之位置 選擇,於實驗設計階段考慮不夠周全為本研究限制之一。 右腳脛前肌與右腳外側腓腸肌相較於左腳之表現,在絆倒時產生之肌電
訊號特別顯著大於日常生活動作(p<0.001, paired T-test),此一結果可能由於 本研究之受測者慣用側皆於右手側,導致失去平衡時使用右腳產生嘗試回 復平衡之現象較為活躍。實驗設計模擬絆倒之拘束部位為受測者之腳踝, 亦有可能在模擬實驗拘束受測者腳踝時影響脛前肌與腓腸肌之表現導致此 一結果。此外,受測者雙手之斜方肌在絆倒實驗亦有特別顯著大於日常生 活動作肌電訊號之表現(p<0.001, paired T-test),且差異程度大於三角肌。本 研究認為與受測者面臨絆倒,軀幹產生前向的傾斜時,提昇手臂向前或向 下撐住防護墊之保護軀幹動作相關,而三角肌之收縮通常影響上肢動作之 外展(abduction)與內引(adduction)動作,故在前後向傾倒狀況之應用相對少 於斜方肌。 在跌倒辨識速度的部份,肌電訊號之平均辨識時間為161 毫秒,而加速 度訊號之平均辨識時間則為282 毫秒,顯示肌電訊號在辨識速度上可能較 速度或加速度等慣性資訊有優勢。圖 9(於 49 頁處)之辨識成功累計比率分 布圖結果,亦顯示在可供辨識之時間區間越短的情況下,使用肌電訊號門 檻辨識之速度優勢將大於使用加速度門檻辨識。 然而,除了辨識跌倒所需要的辨識時間外,若要獨立以肌電訊號作為跌 倒辨識的門檻,仍需要比較肌電訊號與慣性門檻的辨識率。將加速度、肌 電訊號以及以OR 邏輯閘合併肌電訊號門檻與加速度門檻判別跌倒與日常 生活之辨識率、平均辨識時間列於表 6(於 49 頁處)。加速度之 sensitivity