國
立
交
通
大
學
電控工程研究所
碩
士
論
文
以 DSP 為主之電動式振動機數位化控制
DSP-Based Digital Control for Electrodynamic Shaker
研 究 生:林 育 慶
指 導 教 授:陳 鴻 祺 博士
以 DSP 為主之電動式振動機數位化控制
DSP-Based Digital Control for Electrodynamic Shaker
研 究 生:林育慶 Student:Yu-Ching Lin
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
July 2009
Hsinchu, Taiwan, Republic of China 中華民國九十八年九月
以 DSP 為主之電動式振動機數位化控制
研究生:林育慶
指導教授:陳鴻祺 博士
國立交通大學電控工程研究所
摘要
傳統的電動式振動機測試系統主要是由線性功率放大器予以供電激勵,優點是諧波 小,缺點是效率低、體積大,重量重。因此本論文就是要改善其缺點,採用全橋電路架 構及使用 TI 的 TMS320F2812 DSP 模組電路以全數位化來設計控制器,而在實作上空白 時間在高頻會對其電流追隨影響其大,故藉由本論文所提之空白時間補償控制器補償 後,使其達到和線性功率放大電路有其同樣的輸出性能,最後並以 PSIM 模擬軟體及實 作來驗證確實有達到其目地。DSP-Based Digital Control for Electrodynamic Shaker
Student:Yu-Ching Lin Advisor:Hung-Chi Chen
Institute of Electrical and Control Engineering
National Chiao Tung University
Abstract
The conventional electrodynamic system is fed by linear amplifier with the advantage of low output voltage harmonics and with the disadvantage of low efficiency, large volume and weight. In order to improve the amplifier performance, the digital switch-mode amplifier is used in this thesis to yield the similar out performance. The simulation and experimental results also demonstrates the proposed digital switch-mode amplifier.
誌謝
能夠完成這本論文,首先要感謝我的指導教授陳鴻祺博士,在我研究所二年的過程 中,不論在研究上或生活上皆給予我指導。當我在研究遇到瓶頸、開始迷惘的時候,總 能適時地指引方向,讓我能夠繼續前進;老師在研究上的嚴謹態度及熱忱,亦對我產生 極大的影響,對老師的感謝,不是三言二語可以形容。在此特別感謝口試委員廖德誠教 授及俆保羅教授給予本論文的批評指教及寶貴意見,使得本論文更加的完整。 在研究所二年的生活中,要感謝的人太多。首先感謝子揚學長、奕謙學長在研究和 生活上都能給我指導和意見;感謝暐舜同學、崇賢學弟在DSP上的互相指教;感謝曾經 跟我一起鑽研電動式振動機的昭男學弟;感謝庠澤同學、任浩同學常常開車帶著研究室 的同學們出去散心,辛苦你們了,感謝志杰同學、子安學弟,有你們的研究室真是歡樂 無限;感謝貼心的智豪學弟,還有研究室最認真的振宇學弟以及新進來的威諭學弟和宏 和學弟。研究室有大家共同的回憶,是我二年來最大的收獲。此外也要感謝大學同學澤 豪、豹哥、阿勇、柏良、朝傑、胖胖,常常來新竹找我談心,陪我渡過許多難忘的日子, 有你們真好;感謝青青文服的夥伴們,常常給我打氣、鼓勵;感謝表哥和表嫂在新竹對 我的照顧及幫忙;感謝嘿美在這二年來遠距離的關心與問候;感謝妹妹柔柔在生活上與 我相互扶持,在我低潮時的鼓勵及意見。要感謝的人實在太多、繁不及載。感謝老天的 安排,讓我遇見你們,這一路一起扶持成長的過程和磨練,都將成為我人生中無可取代 的回憶。 最後感謝最愛我最庝我的老媽、以及幫我分析事情及給我許多意見的老爸,還有教 我許多人生大道理的奶奶及已故的爺爺,有你們的支持是我在學二年最大的動力,使我 可以無後顧之憂的完成學業。
目錄
摘要 ...i Abstract...ii 誌謝 ...iii 圖目錄 ...vi 表目錄 ...xi 第一章 簡介 ...1 1.1 研究動機 ... 1 1.2 電動式振動機 ... 2 1.3 本論文架構 ... 3 1.4 文獻回顧 ... 5 第二章 電動式振動機動態模式建立 ...7 2.1 簡介 ... 7 2.2 主導方程式 ... 7 2.3 電流源激勵之頻率響應特性 ... 11 2.4 以線性功率放大器實測振動機之特性 ... 12 2.5 電流源激勵動態模式參數之估測 ... 20 2.5.1 機械參數之估測 ... 20 2.5.2 電樞線圈之電性參數 ... 22 第三章 電動式振動機之數位化控制 ...23 3.1 簡介 ... 23 3.2 反流器之設計 ... 23 3.3 電流控制 ... 28 3.3.1 磁滯電流控制 PWM...28 3.3.2 定頻電流控制 PWM...29 3.3.3 空白時間(dead time)影響... 29 3.4 所提電流控制器 ... 43 第四章 模擬驗證 ...46 4.1 PSIM 模擬軟體... 46 4.2 理想電源 ... 48 4.2.1 理想電壓源 ... 48 4.2.2 理想電流源 ... 554.4 電流模擬結果 ... 64
第五章 實作結果 ...72
5.1 數位訊號處理(DSP) ... 72
5.2 實作電路 ... 73
5.2.1 電力電路(Power Circuit) ... 75
5.2.2 數位類比轉換電路(A/D Circuit & D/A Circuit) ... 76
5.2.3 閘極驅動電路 ... 77
5.3 電流實作結果 ... 78
5.4 掃頻實作結果 ... 90
第六章 結論 ...92
圖目錄
圖 1.1 電動式振動機 V406/8 實體圖 ...2 圖 1.2 電動式振動機 V406 之結構圖 ...3 圖 1.3 電動式振動機測試系統組成方塊圖 ...5 圖 2.1 電動式振動機之機電等效電路 ...9 圖 2.2 電動式振動機之機電等效方塊圖:(a)電壓源激勵,(b)電流源激勵 ...11 圖 2.3 實測振動機架構圖 ...12 圖 2.4 實測頻率為 5Hz 之波形圖 ...13 圖 2.5 實測頻率為 20Hz 之波形圖 ...14 圖 2.6 實測頻率為 100Hz 之波形圖 ...14 圖 2.7 實測頻率為 500Hz 之波形圖 ...15 圖 2.8 實測頻率為 1000Hz 之波形圖 ...15 圖 2.9 實測頻率為 2000Hz 之波形圖 ...16 圖 2.10 HIA增益圖與相位圖 ...17 圖 2.11 HVA增益圖與相位圖...18 圖 2.12 電樞電阻與電感值 ...22 圖 3.1 全橋式反流器 ...24 圖 3.2 單極性電壓切換 ...26 圖 3.3 單極性電壓切換頻譜分析 ...27 圖 3.4 磁滯電流控制 PWM:(a)電路架構及示意圖;(b)控制架構 ...28 圖 3.5 定頻電流控制 PWM 之控制架構...29 圖 3.6 空白時間tΔ之效應 ...31 圖 3.7 tΔ對v 的影響... 32 o 圖 3.8 tΔ對正弦波輸出之影響 ...32 圖 3.9 三角波開關訊號( >圖 3.10 三角波開關訊號(iA < 0):(a)理想;(b)具有空白時間... 35 圖 3.11 鋸齒波開關訊號(iA > 0):(a)理想;(b)具有空白時間... 37 圖 3.12 鋸齒波開關訊號(iA < 0):(a)理想;(b)具有空白時間... 38 圖 3.13 三角波電壓輸出訊號模擬圖:(a)iA > 0;(b)iA < 0... 39 圖 3.14 鋸齒波電壓輸出訊號模擬圖:(a)iA > 0;(b)iA < 0... 40 圖 3.15 三角波電壓輸出訊號實作圖:(a)iA > 0;(b)iA < 0... 41 圖 3.16 鋸齒波電壓輸出訊號實作圖:(a)iA > 0;(b)iA < 0... 42 圖 3.17 電流控制反流器供電振動機系統 ...43 圖 3.18 反流器供電振動機之電流控制方塊圖 ...44 圖 3.19 加入空白時間補償控制器之控制方塊圖 ...45 圖 4.1 PSIM 功能模組概圖...46 圖 4.2 理想電壓源 PSIM 模擬電路圖...48 圖 4.3 理想電壓源 5Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...49 圖 4.4 理想電壓源 20Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...50 圖 4.5 理想電壓源 100Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...51 圖 4.6 理想電壓源 500Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...52 圖 4.7 理想電壓源 1000Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...53 圖 4.8 理想電壓源 2000Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...54 圖 4.9 理想電流源 PSIM 模擬電路圖...55 圖 4.10 理想電流源 10Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...56 圖 4.11 理想電流源 20Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...57 圖 4.12 理想電流源 30Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...58 圖 4.13 理想電流源 100Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ...59 圖 4.14 理想電流源 1000Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ....60 圖 4.15 理想電流源 2000Hz 模擬波形:(a)無載 (m=0.221kg);(b)加載(m=0.532kg) ....61
圖 4.17 kpwm方塊圖 ...64 圖 4.18 模擬所得頻率為 10Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 66 圖 4.19 模擬所得頻率為 20Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 67 圖 4.20 模擬所得頻率為 30Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 68 圖 4.21 模擬所得頻率為 100Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 69 圖 4.22 模擬所得頻率為 1000Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 70 圖 4.23 模擬所得頻率為 2000Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.532kg);(d)加補償器(m=0.532kg) ... 71 圖 5.1 系統示意圖 ...73 圖 5.2 實作電路照片 ...74 圖 5.3 電力電路 ...75 圖 5.4 輸入訊號轉換電路 ...76 圖 5.5 D/A 轉換電路 ...77 圖 5.6 閘極驅動電路 ...77
圖 5.7 量測所得頻率為 5Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 79 圖 5.8 量測所得頻率為 10Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 80 圖 5.9 量測所得頻率為 20Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 81 圖 5.10 量測所得頻率為 30Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 82 圖 5.11 量測所得頻率為 40Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 83 圖 5.12 量測所得頻率為 50Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 84 圖 5.13 量測所得頻率為 100Hz 之弦波電流追隨特性及由其激勵所生之加速度:
(c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 85 圖 5.14 量測所得頻率為 250Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 86 圖 5.15 量測所得頻率為 500Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 87 圖 5.16 量測所得頻率為 1000Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 88 圖 5.17 量測所得頻率為 2000Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 89 圖 5.18 量測掃頻 5Hz~2000Hz 之弦波電流追隨特性及由其激勵所生之加速度: (a)未加補償器(m=0.221kg);(b)加補償器(m=0.221kg); (c)未加補償器(m=0.377kg);(d)加補償器(m=0.377kg); (e)未加補償器(m=0.532kg);(f)加補償器(m=0.532kg)... 91
表目錄
表 1.1 參考文獻分類 ...6 表 2.1 特定頻率所量測之加速度峰值 ...13 表 2.2 HIA之極點與零點 ...17 表 2.3 HVA之極零點表...19 表 3.1 電樞電流在 DSP 的對應表...63 表 5.1 開關特性時間規格表 ...75第一章
簡介
1.1 研究動機
近幾年來,隨著時代的進步,工商業的發達,高科技產業已逐漸進入奈米化、精密 化,而產品愈小愈精緻時,對於振動的靈敏度要求就愈高,而振動機是振動實驗測試不 可或缺的電子設備[1~3]。而機械的振動測試通常是去研究振動的影響和去估測物質和結 構的物理特性以及機械能夠接受振動程度的範圍。其應用的範圍從太空到汽車,運輸工 業、建築、電子產品、大型機械和包裝,而最普通的用途與生產控制、動態特性和環境 測試有關[1]。產品的振動試驗主要的目的[4]為:(1)縮短產品之開發時間;(2)確保新產 品切合所定之目標;(3)減少產品在運輸過程中受損害,進而降低顧客之退貨率;(4)提 供產品在不當操作下可能出現的損害情形;(5)使產品獲得最大的適用範圍;(6)提供產 品周延之防振及耐振能力等。振動測試控制之主要任務為使振動平台負載待測物時,依 照所定之規格準確的振動。因此,在從事振動測試控制中,應該力求可以準確控制振動 平台(Vibration table)的振動行為。在控制上,一般直接以加速規感測加速度訊號,而所 需的速度以及位移再藉由積分得到。 振動機正弦波振動試驗通常都以可控制頻率之交流電流源經線性功率放大器激勵 電樞線圈,再配以適當之加速度回授控制,雖然線性功率放大器作為電樞之激勵源,具 有可產生寬廣變頻低諧波之振動特性,但其轉換效率低、體積及重量均大為其缺點。而 以 PWM 之開關切換控制電動式振動機是最近十年的趨勢[10,11],加上數位化控制慢慢 的受到重視,故本論文將研究以 TI 的 TMS320F2812 DSP 模組電路以全數位化來設計控 制器,再配以良好之電流控制 PWM 之開關切換控制來實現電動式振動機正弦波振動試 驗,以用來改善線性功率放大器之缺點,並獲得良好的電流追隨特性及其所激勵之加速 度。1.2 電動式振動機
振動機為振動實驗測試不可或缺的電子設備[1~3]。而本論文所採用的電動式電動機
為 Ling Dynamic Systems (LDS)公司之 V406 電動式電動機,而實體圖如圖 1.1 所示,其 長度為 235mm,寬度為 165mm,高度為 274mm,最大隨機振動力為 89N。在控制上, 可以感測振動平台(Vibration table)之加速度、速度及位移,直接以加速規量得加速訊號, 而所需之速度及位移再藉由積分得之。 圖 1.1 電動式振動機 V406/8 實體圖 圖 1.2 為電動式振動機 V406 之結構圖,說明如由上而下分別為測試物品、測試平 台、電樞,轉子、振動膜、外殼、電樞線圈、彈簧、磁鐵結構及永久磁鐵,值得一提的 是電樞線圈打點的是表示電流流出,打叉的是表示電流流入,而永久磁鐵和磁鐵結構所 產生的磁場方向(N 極到 S 極)如圖 1.2 所標示,而根據佛來明左手定則{用來判斷於電動 機當電流流過導電體時,在有外加磁場時的運動方向。其手勢:食指、中指、拇指伸直, 各為 90 度。中指表示導電體上供應電流的方向;食指表示磁場方向(N 極到 S 極);拇指 表示導電體的運動方向}知道振動機之測試平台的運動方向此時為向上,而本論文之主 要目的在於從事 DSP 及切換式全橋電路以數位變頻控制電動式振動機之弦波測試,故 電流為弦波電流,當電流方向為負半週時,電樞線圈打點和打叉就會改變,再根據佛來
明左手定則知道振動機之測試平台的運動方向就會為向下,再以 DSP 去控制振動機的 振動頻率,達到我們所要的數位變頻控制電動式振動機之弦波測試。 N S Test specimen Table a 測試物品 測試平台 電樞,轉子 振動膜 外殼 電樞線圈 磁鐵結構 永久磁鐵 彈簧 圖 1.2 電動式振動機 V406 之結構圖
1.3 本論文架構
激勵振動機電樞線圈的電源需具備以下幾點:(1)能避開機械共振的低電流失真。(2) 在寬頻率範圍(5~2000Hz)內能產生良好弦波振動測試特性及有好的電流追隨響應。(3) 適當的額定功率。而本論文以全橋電路架構就可達到上述目的,以 TI 的 TMS320 F2812 DSP 模組電路來設計電流的控制架構中,並不需要太多復雜的控制器,而以一簡單的空 白時間補償控制器,就可以有良好的電流追隨。 圖 1.3 為一典型之電動式弦波振動機測試系統組成之方塊圖,主要由可控頻率之交 流電流源經線性功率放大器激勵電樞線圈,再配以適當之加速度回授控制。線性功率放 大器作為電樞之激勵源,具有可產生寬廣變頻低諧波之振動特性,但其轉換效率低、體 積及重量均大。為了克服這些缺點,可採全橋電路作為電樞之激勵源,然而全橋供電之電動式振動機推動易受到電流諧波之影響,必須配以良好的電流控制 PWM 調控技巧, 而本論文以 TI 的 TMS320 F2812 DSP 模組電路用全數位化方式計算處理,產生 PWM 訊 號,再以驅動電路放大訊號,推動全橋電路供電電動式振動機,將可取代傳統線性功率 放大器作為振動機激勵源之能力,並有良好的加速度及電流追隨特性。而一個具良好弦 波振動操控特性之變頻供電電動式振動機已被研製於[12],與本論文最大不同處則是以 全數位化進行研製。 本論文所採用的振動機為雙端式振動機[5-9],首先必需推導電動式振動機的動態模 式,還有電動式振動機之機械參數及電樞線圈電性參數的估測。本論文旨在從事全橋供 電之電動式振動機弦波測試系統的建立,而為了得到良好的全橋驅動操作及振動測試性 能,需徹底的了解電動式振動機之結構特微,為了更瞭解電動式振動機,本論文還利用 Dynamic Signal Analyzer(DSA)進行掃頻得到振動機 V406 之轉移函數及其極、零點分 佈,以致於讓電動式振動機之機械參數及電樞線圈電性參數的估測更為準確。 接下來的電流控制切換控制器[10-20],以 TI 的 TMS320 F2812 DSP 模組電路來設計 全數位化控制器。而欲使全橋供電之電動式振動機具有媲美線性功率放大器供電之振動 測試性能,就必需妥善設計其電流控制 PWM 切換控制機構,使電線圈電流具有低失真 弦波且快速響應特性。而此全橋電路架構採用定頻式電流控制且單極性電壓 PWM 切換 方式,以獲得更好的電流及加速度追隨特性。在電流控制方面,並不需要太多復雜的控 制器,而以一簡單的空白時間補償控制器,就足以得到良好的電流追隨。 本論文另外收集了外迴路加速度控制[21-29],採用多迴路控制方式,迴授振動機之 電樞電流及其所激勵之加速度,而加速度控制器採用命令前向控制器及具強健性之擾動 前向控制器來輔助迴控制器。 本論文之安排如下,第二章介紹電動式振動機之結構、操作原理及其動態模式, 以供控制器之分析和設計。第三章全數位化控制器,介紹全橋電路架構,以及電流控 制 PWM 調控技巧,並詳細介紹以全數位化之電流空白時間補償控制器之設計[30]。第 四章為實作電路部分,主要包含電力電路(POWER CIRCUIT)、數位類比轉換電路(A/D
章將作詳細介紹。第五章為實作結果,由實作結果知電流追隨特性及其所激勵的加速度 訊號都相當良好。最後第六章做一些結論,並提出後續的研究建議。 圖 1.3 電動式振動機測試系統組成方塊圖
1.4 文獻回顧
參考文獻為表 1.1 所示,其中打勾(V)為其文獻與其功能之對應,打問號(?)則是參 考文獻未提到其功能。表 1.1 為近十年來,對於振動機所提出之論文所作出之比較,發 現早期振動機控制器都是以類比電路來實現,而最近幾年來數位控制慢慢受到重視,而 發展出半數位半類比的控制器架構,致今尚未出現全數位化的控制器架構,本論文就是 用全數位化做為控制器架構,以 TI 的 TMS320 F2812 DSP 模組電路來設計控制器。而 數位化是近代科技一個很重要的趨勢與成就,數位化可以讓一個系統有可靠性高、精確 度高、抗干擾能力強、可程式規劃、維護容易、容易模組化設計等優點,這些優點可以 改進以往類比系統的限制。而數位也有必需克服及突破的地方,以 TMS320 F2812 DSP 來說只有 16Bit,所以可以處理的數學就有限,且還有溢位的問題,都是必需來克服的。 而在輸出電壓加上 LC 濾波器是為了讓輸出電壓的訊號更為漂亮,濾除一些雜訊及外在 因素的干擾,而本論文沒這方面的困擾,故不使用 LC 濾波器。在迴授電路的部份,在論文使用了電流迴路及加速度迴路作為迴授訊號,取得的訊號經由 A/D 電路,再進入 DSP 做訊號處理,可以參考[12,13]。而在自由度(Degrees Of Freedom,DOF)上參考資料 上[12,13,21,22,23,24,25,26]皆採用單一自由度,而僅[27]採用雙自由度,不過在實現上雙 自由度有較多的參數可以去控制,不過相對而言就復雜許多,而電動式振動機,僅需單 一自由度就可以控制良好,故本論文亦採用單一自由度控制。 表 1.1 參考文獻分類 [12] [13] [21] [22] [23] [24] [25] [26] [27] With LCfilter V V V V V V Without LCfilter V ? ? a,i loop V V a,v loop V V V V V A,i,v loop ? V 1DOF V V V V V V V V 2DOF V
Digital and analog controller V V
Analog controller ? V V ? V ? ?
第二章
電動式振動機動態模式建立
2.1 簡介
本章節的目地在於推導電動式振動機的動態模式,還有電動式振動機之機械參數及 電樞線圈電性參數的估測。本論文旨在從事全橋供電之電動式振動機弦波測試系統的建 立,而為了得到良好的全橋驅動操作及振動測試性能,需徹底的了解電動式振動機之結 構特微,為了更瞭解電動式振動機,本論文還利用 Dynamic Signal Analyzer(DSA)進行 掃頻得到振動機 V406 之轉移函數及其極、零點分佈,以致於讓電動式振動機之機械參 數及電樞線圈電性參數的估測更為準確。而主導方程式的公式推導過程中,還導出電壓 源激勵模式及電流源激勵模式,電壓源激勵模式其電流命令在頻率 5Hz~2000Hz 追隨下 相當良好,但電壓源激勵模式卻深受電樞參數之電阻値及電感值影響使得控制架構複雜 許多;相較之下,電流源激勵模式不受應電勢及電樞參數之電阻値及電感值的影響,且 其控制架構相對簡單,若以 TI 的 TMS320F2812 DSP 模組電路來設計其控制器比較實際 及可行,故本論文採用電流源激勵模式。在第四章會建立 PSIM 模擬電路來驗證其所建 立系統的正確性。2.2 主導方程式
要分析電動式振動機的主導方程式,首先必需先從彈簧機械系統分析起,可以參考 文獻[12,22],由圖 2.1 知振動機之電樞線圈所產生之電磁力 f ,及其上下移動所產生與em 振動平台速度成正比之感應電動勢e,可表示為: o o em Bli i f = =Γ Δ (2.1) v Blv e= =Γ Δ (2.2) 其中em f :電樞線圈產生的線性力量 B :磁通密度 l:電樞線圈作用導體的有效長度 o i :電樞線圈電流 Bl Δ = Γ :力量產生常數 e:感應電動勢 v:測試平台振動垂直速度 假設振動位移小,則應用彈簧虎克定律,彈簧之恢復力可以表示為: kx fsp =− (2.3) 又通常物體(質量)在空氣中移動之摩擦力與速度成正比,摩擦力可以表示為: cv dt dx c ff =− ( / )=− (2.4) 其中負號代表此摩擦力與速度反向。根據牛頓第二運動定律 f =ma可得: 2 2 dt x d m f f fem − f − sp = (2.5) 將(2.1) (2.3) (2.4)式所述之力量之定義代入(2.5)式可得: kx dt dx c dt x d m i fem =Γo = 2 + + 2 (2.6) 其中 sp f :彈簧之恢復力 f f :摩擦力 m:測試平台的質量 c:阻尼係數 k:彈簧係數
f f sp f o em i f =Γ x 0 = x 圖 2.1 電動式振動機之機電等效電路 根據電動式振動機之機電等效電路如圖 2.1 所示以及電路原理(KVL、KCL)可寫出 下列電路方程式: e Ri dt di L v o o o = + + (2.7) dt dx v= (2.8) dt dv a= (2.9) 其中: o v :振動機兩端電壓 o i :振機機的電流 L :振動機的電感值 R :振動機的等效電阻值 a:測試台面的振動加速度 由(2.6)~(2.8)式可得下列狀態方程式(2.10): ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − Γ Γ − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 0 0 1 0 0 0 L v v x i m c m k m L L R v x i dt d o o o (2.10) 為了方便觀察其動態特性,將(2.6)式及(2.7)式兩邊取 Laplace-Transform,並且設定
) ( ) ( ) ( ) ( ) ( 2 s i s F s kX s csX s X ms + + = em =Γo (2.11) ) ( ) ( ) ( ) (s RI s e s v s LsIo + o + = o (2.12) (2.11)式及(2.12)式顯示振動機包含有電機和機械兩種系統,分析(2.11)式及(2.12)式 可得兩種不同的激勵方式: A、電壓源激勵之動態模式: 將(2.2)式做 Laplace-Transform,可得到: ) ( ) ( ) (s v s sX s e =Γ =Γ (2.13) 整理(2.11)式得到: ) ( ) ( 2 s X k cs ms s io Γ + + = (2.14) 將(2.13)與(2.14)代入(2.12)式,套用A(s)=s2X(s)的關係式,移項整理可得其加速 度與端電壓的轉移函數如下: s R sL k cs ms s s v s a H o VA 2 2 2 ) )( ( ) ( ) ( Γ + + + + Γ = =Δ (2.15) B、電流源激勵之動態模式 : 整理(2.11)式可得到: k cs ms s i s X o + + Γ = 2 ) ( ) ( (2.16) 又A(s)=s2X(s),所以其加速度與電流源的轉移函數如下: k cs ms s s i s a H o IA + + Γ = =Δ 2 2 ) ( ) ( (2.17) 由(2.15)及(2.17)式兩種激勵方式可表示成如圖 2.2 之機電控制方塊圖。而由圖 2.2 可看出電壓源激勵方式深受電樞參數電阻值及電感值影響,其控制架構相當複雜;相反 地,電流源激勵方式的控制架構相對地簡單許多,其加速度不受振動機應電勢及電樞阻 抗壓降的影響。 由上述分析可知,若採用電流源激勵方式的控制架構可以避免受到電樞參數電阻值
論文採用電流源激勵方式的動態模式。 k cs ms s + + 2 Σ sL R+ 1 Γ s Γ o i v a f o v (a)電壓源激勵 k cs ms s + + 2 Γ s o i f v a (b)電流源激勵 圖 2.2 電動式振動機之機電等效方塊圖:(a)電壓源激勵,(b)電流源激勵
2.3 電流源激勵之頻率響應特性
由(2.17)式,在定電流激勵下,對電流微分為零,即sIo(s)=0,且加速度A(s)≠0, 其特性方程式如下: 0 2 + + = k cs ms (2.18) 將s= jω代入(2.18)式且令實部為零,可得: 0 2 = −mω k (2.19) 整理(2.19)式可得 m k mv n, = ω ,因此自然頻率為: m k fnmv nmv π π ω 2 1 2 , , = = (2.20) 此為撓性彈簧之機械共振頻率,由(2.20)式可知,此共振頻率會隨著振動待測物時 質量增加反而下降。除了上述分析所得到的共振現象外,尚有另一共振情況發生,在電 樞軸與其連結的支撐機械結構處,亦形成一機械動態系統,具有另一軸機械共振頻率 am n f , ,此共振行為由於不容易模式化,因此,在此不仔細推導分析。 一般而言, fn,am ≥ fn,mv,為避免由於外加激勵驅動造成電樞軸機械共振的情況發的驅動共振操作頻率 fn,mv。
2.4 以線性功率放大器實測振動機之特性
由前面幾節的討論,尚還缺少一些 Shaker 的特性,才能夠將系統的參數估測出來, 所以本節將實測振動機的特性,並附上其實測結果,來求解系統的等效參數。
實測儀器、器材採用 Agilent 公司製造之 Dynamic Signal Analyzer (DSA) 35670A, Ling Dynamic System (LDS)公司製造之功率放大器 PA100E 及 Ling Dynamic System (LDS)公司製造之電動式振動機 V406 型(最大隨機振動力為 89N),並使用加速規來量測 電動式振動機之加速度,實測振動機架構圖如圖 2.3 所示。 a o i o i (a) o v a o v (b) 圖 2.3 實測振動機架構圖 首先由 PA100E 產生定電壓大小之弦波電壓供電於電動式振動機,表 2.1 為各電壓 頻率下所量測之加速度峰值。圖 2.4~圖 2.9 為實測所得波形圖,分別為 5Hz~2000Hz。 其中, a的比例為 102.7mV/1g,( 2 / 8 . 9 m s g = )。
表 2.1 特定頻率所量測之加速度峰值 頻率 對應之加速度峰值 5Hz 0.941 m/s2 20 Hz 9.31 m/s2 100 Hz 35.476 m/s2 500 Hz 23.422 m/s2 1000 Hz 22.226 m/s2 2000 Hz 19.826 m/s2 2 / 96 . 0 m s 200ms o i o v a 1V 0.5A 0 0 0 圖 2.4 實測頻率為 5Hz 之波形圖
2 / 6 . 9 m s a o v o i 圖 2.5 實測頻率為 20Hz 之波形圖 2 / 48m s 10ms a 1V 0.5A o v o i 0 0 0 圖 2.6 實測頻率為 100Hz 之波形圖
2 / 2 . 19 m s a o v o i 圖 2.7 實測頻率為 500Hz 之波形圖 2 / 2 . 19 m s a o v o i 圖 2.8 實測頻率為 1000Hz 之波形圖
2 / 2 . 19 m s a o v o i 圖 2.9 實測頻率為 2000Hz 之波形圖 接著利用 DSA 進行掃頻得到電動式振動機 V406 轉移函數之波德圖,如圖 2.10 所 示HIA之增益圖與相位圖與圖 2.11 所示HVA之增益圖與相位圖,而本論文採用電流源激 勵,故圖 2.10 極為重要,在下一節利用此圖來估測電動式振動機的機械參數。而圖中的 無載重量會在下一節中做詳細的估測說明,估測出來無載重為 0.221kg,加載一個物體 總重為 0.377kg (無載重 0.221kg 加物體一重 0.156kg),加載二個物體總重為 0.532kg (無 載重 0.221kg 加物體一重 0.156kg 加物體二重 0.155kg)。由圖形近似技巧(Curve fitting technique)得到該轉移函數之極點與零點,建立表格如表 2.2 和表 2.3 所示。
101 102 103 0 10 20 30 40 50 60 101 102 103 -50 0 50 100 150 200 加載兩個物體 (m=0.532kg) 無載(m=0.221kg) 加載一個物體 (m=0.377kg) Frequency (Hz) Frequency (Hz) 無載(m=0.221kg) 加載一個物體 (m=0.377kg) 加載兩個物體 (m=0.532kg) 圖 2.10 HIA增益圖與相位圖 表 2.2 HIA之極點與零點 極點 零點 63 . 648 781 . 63 ± j 295.66± j511.81 8 . 459 32 . 308 ± j 8483.875± j627. 無載 214 . 36 229 . 1 ± j − −5.817± j17.141 3 111 . 12 + − e −101.75± j425.56 69 . 834 − −634.23 29 . 419 086 . 90 ± j − −25.512 加載一個物體 433 . 27 373 . 1 ± j − 15.528 75 . 474 371 . 7 ± j 157.245± j475. 95 . 441 443.61 346 . 23 3 95 . 861 e− ± j − −13.41 加載兩個物體 016 . 7
圖 2.11 HVA增益圖與相位圖 本論文採用電流源激勵,而利用 DSA 所畫出來的波德圖如圖 2.10 所示,亦得到其 極、零點如表 2.2,由表 2.2 知很多估測出來的極、零點都可以當作極、零點對消而忽略, 而除了主極點外,很多極點都在主極點的左邊十倍遠,對系統的影響極小,故亦可忽略 之,最後可整理出近似(2.17)式之轉移函數HIA。由表 2.2 知經化簡過後無載的主極點為 214 . 36 229 . 1 ± j − ,經計算過後可知無載時的共振頻率為(2.21)式,而有載(加二物體)的 主極點為−861.95e−3± j23.346,經計算過後可知無載時的共振頻率為(2.22)式,而主極 點又主導其系統的增益與相位趨勢,系統的主極點為成對的共軛根又屬於小ξ系統,故 在共振頻率處系統會有最大增益,同時相位會下降180 ,而由圖 2.10 中亦可得到相同的° 驗證。故在本節所得到的資料,將在下節作為電流源激勵動態模式參數之估測用。而電 壓源激勵的分析如同上述,因非本論文的研究範圍,故不贅述。 ) / ( 214 . 36 * 2 rad s oN π ω = (2.21) ) / ( 346 . 23 * 2 rad s oL π ω = (2.22)
表 2.3 HVA之極零點表 極點 零點 3 702 . 12 69 . 399 ± j e+ 88.903e+3 7 . 621 − 8.532e+3 3 551 . 1 4 . 153 ± + − j e −932.35 6 . 885 548 . 38 ± j − −174.13± j1.548e+3 15 . 342 456 . 10 ± j − 34−40.143± j877. 175 . 59 774 . 44 ± j − −9.439± j339.35 33 . 103 − 無載 887 . 9 3 463 . 32 e+ −8.074e+3 3 89 . 4 + − e 7.01e+3 3 609 . 1 71 . 24 ± + − j e −24.831± j1.611e+3 3 342 . 1 708 . 21 ± + − j e −21.116± j1.341e+3 2 . 880 371 . 20 ± j − −20.428± j877.28 98 . 376 39 . 26 ± j − −27.876± j373.2 55 . 230 − −356.83 869 . 39 28 . 31 ± j − −66.982 加載一個物體 914 . 9 3 293 . 4 e+ 3.187e+3 3 348 . 1 + − e −2.355e+3 3 426 . 1 317 . 83 ± + − j e −85.483± j1.42e+3 84 . 823 566 . 6 ± j − −3.766± j822.61 5 . 469 126 . 25 ± j − −24.899± j469.84 175 . 35 551 . 31 ± j − −108.57 加載兩個物體
2.5 電流源激勵動態模式參數之估測
由於振動機操作頻率範圍相當寬廣(通常 5Hz~2kHz),有些系統的參數會與頻率相 關。因此,利用估測技巧獲得精確之模式參數是必需的。以下簡要介紹一些電流源激勵 的動態模式參數之估測步驟[12]。 2.5.1 機械參數之估測 由(2.17)式知,電流源激勵的轉移函數在無載(m=mo)及有載(m=mo +mL)下可表示 為: ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + + + Γ = = + + Γ = = + = Δ = Δ k cs s m m s s i s a s H k cs s m s s i s a s H L o m m m o L IA o m m o N IA L o o 2 2 , 2 2 , ) ( ) ( ) ( ) ( ) ( ) ( ) ( (2.23) 假設振動機的電樞線圈是經由一全橋供電激磁,在發生共振的情況下,分別將無載 共振頻率 o oN m k = ω 及有載共振頻率 ) ( o L oL m m k + = ω 代入(2.23)式中,可得轉移函數如 下: ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + = Γ = = = Γ = = Δ Δ ) ( , ) ( ) ( ) ( , ) ( ) ( ) ( , , L o oL oL o oL L IA o oN oN o oN N IA m m k c j s i s a j H m k c j s i s a j H ω ω ω ω ω ω (2.24) 在發生共振情況下,可以很明顯地由(2.24)式看出,加速度a(s)相位角領先電樞電 流io(s)90 。若假設電流頻率很高時,由(2.23)式可得: o ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ >> + Γ = ∞ = >> Γ = ∞ = oL L o L IA L IA oN o N IA N IA m m H j H m H j H ω ω ω ω ω ω , ) ( ) ( , ) ( ) ( , , , , (2.25) 根據(2.23)~(2.25)式,機械參數的估測可分為三個步驟[12],說明如下:步驟一: 加上負載使得mL =0.311kg,在改變頻率下,可得到HIA的頻率響應圖如圖 2.10, 此時可以由圖 2.10 中找出或由計算得之,如(2.21)式、(2.22)式,無載時的共振頻率為 s rad oN = 2π ×36 .214 ω 以及有載時的共振頻率為 s rad oL =2π×23.346 ω ,將其代 入(2.24)式,解聯立可得: ) ( 11451 ), ( 221 . 0 m N k kg mo = = (2.26) 步驟二: 由圖 2.10 觀察出HIA,L(∞)=23.3775(約 27.376dB),並將其值與(2.26)式代入(2.25) 式,可得: ) ( 44 . 12 ) ( ) (mo +mL HIA,L ∞ = N A = Γ (2.27) 步驟三: 最 後 加 上 負 載 mL =0.311kg , 將 量 測 得 到 的 共 振 頻 率 轉 移 函 數 大 小 6307 . 353 ) ( ,L oL = IA j H ω (約 50.97dB),及(2.27)式代入(2.24)式可得: ) ( 16 . 5 ) ( , m s N j H c oL L IA oLΓ = ⋅ = ω ω (2.28) 由上所述可以得知,在操作頻率範圍(5Hz~2kHz)下,振動機的機械參數Γ、c及k與 頻率無相關性為定值,但是質量m卻會隨著我們外部所加的物體決定。 而本論文所採用之電動式振動機型號同參考資料[12],故本論文的電樞線圈之電性 參數採用參考資料[12],如(2.30)、(2.31)式所示,將這二式利用 Matlab 跑圖如 2.12 所示, 由圖 2.12 的結果可以看出 R 隨著頻率上升而增加、L 卻隨著頻率上升而減少。值得注意 的是,電樞線圈電性參數與振動機的機械參數的估測結果不同,其電性參數 R 、 L 為頻 率的函數,兩者的值均會受到操作頻率的影響。
2.5.2 電樞線圈之電性參數 經由上述三個步驟之討論,得到振動機的機械參數,而電樞線圈之電性參數[12], 說明如下: 參考圖 2.1 的電路架構,令測試平台靜止(v=0),此時的感應電動勢為零(e=0), 可得到電壓與電流的相量形式如(2.29) 式: o o R j L i vˆ =(ˆ+ ωˆ)ˆ (2.29) 由(2.29)式可知,在操作頻率(5Hz~2kHz)下之電阻 R 及電感 L,可以藉由量測到的vo
和i 算出,利用圖形近似技巧(Curve fitting technique) ,可得圖 2.12: o
⎪⎩ ⎪ ⎨ ⎧ ≤ ≤ + ≤ ≤ + = ∧ 2000 45 , log 81 . 0 27 . 0 45 5 , log 19 . 0 30 . 1 f f f f R (2.30) ⎪⎩ ⎪ ⎨ ⎧ ≤ ≤ − ≤ ≤ − = ∧ 2000 330 , log 26 . 0 96 . 0 330 5 , log 97 . 0 75 . 2 f f f f L (2.31) 圖 2.12 電樞電阻與電感值
第三章
電動式振動機之數位化控制
3.1 簡介
本章節為本論文的核心,講解全橋電路硬體架構及以 TI 的 TMS320F2812 DSP 模組 電路來設計全數位化控制器。而欲使全橋供電之電動式振動機具有媲美線性功率放大器 供電之振動測試性能,就必需妥善設計其電流控制 PWM 切換控制機構,使電線圈電流 具有低失真弦波且快速響應特性。而此全橋電路架構採用定頻式電流控制且單極性電壓 PWM 切換方式,以獲得更好的電流及加速度追隨特性。而全數位化控制在電流控制方 面,並不需要太多復雜的控制器,而以一簡單的空白時間補償控制器,就足以得到良好 的電流追隨,而設計方法和結果會在本章做詳細的介紹。3.2 反流器之設計
相較於半橋式反流器,全橋式反流器具有較高的電壓利用率及適合較大容量應用場 合的優點。圖 3.1 中所示的全橋式反流器,具有四象限工作能力,欲使在寬廣頻率範圍 內(5Hz~2kHz)具有良好的電流追隨及負載擾動調控特性,在切換控制上宜採脈寬調變技 巧(PWM),以使其進而能有良好的弦波訊號追隨控制性能。 同樣全橋反流器電路組態,輸出電壓特性會因為採用之脈寬調變切換方式的不同而 有差異。常見之脈寬調變切換方式可分為單極性電壓切換及雙極性電壓切換。若切換頻 率及輸出電壓相同,則採單極性切換之反流器實值上其諧波頻率為雙極性電壓切換的兩 倍;輸出電壓變化上,單極性電壓切換為V
d而雙極性電壓切換則為 2V
d,前者所引起 之電壓應力、EMI 問題及雜訊相對於後者較小。故本計劃將採取單極性切換技巧,以下 簡要介紹單極性電壓切換 PWM 反流器的特性。圖 3.1 全橋式反流器 以圖 3.1 所示的弦波反流器為例,單極性電壓切換方式如圖 3.2(a)所示,弦波控制 訊號
v
cont與三角波v
tri之比較結果,控制 A 臂的開關切換;而控制 B 臂的開關切換所用 的控制訊號,則是−
v
cont與相同三角波v
tri比較。如此,所得到的四象限輸出特性為: (1)T
A+,T
B− on:v
AN=
V
d,v
BN=
0
;vpwm =Vd (2)T
A−,T
B+ on:v
AN=
0
,v
BN=
V
d ;vpwm =−Vd (3)T
A+,T
B+ on:v
AN=
V
d,v
BN=
V
d ;vpwm =0 (4)T
A−,T
B− on:v
AN=
0
,v
BN=
0
;vpwm =0 (3.1) 定義振幅調變指數m
a及頻率調變指數m
f 如下: tri cont a v v m ˆ ˆ Δ , cont s f f f m Δ (3.2)其中,vˆcont為正弦控制波的振幅,vˆ 為三角波的振幅,tri f 為三角波的頻率,s fcont為正
弦控制波的頻率。如圖 3.3 所示,如果m = 偶數,由諧波分析可得f vAN 、vBN 及 BN AN pwm v v v = − 的頻譜,其在線性調變(ma <1)下的主要特徵為: (i)輸出基本波電壓:
而開關利用率可推得為0.125ma。 (ii)輸出電壓: 由圖 3.3(a)~圖 3.3(c):如
m
f 為偶數,v
AN及v
BN的諧波頻譜為:奇數倍m 諧波會f 出現同時帶有偶次邊帶諧波(如mf ±2,mf ±4,……),偶次倍m
f 諧波不會出現,但 帶有奇次邊帶諧波(如2mf ±1,2mf ±3,……)。然而採用單極性電壓切換方式的反流 器,其輸出電壓諧波中奇數倍m 及其邊帶諧波均不復存在,亦即具有較高頻率的諧波f 成分特性。tri cont B on v v T , tri cont A on v v T , t (a) (b) ) ( BN B v T t A T (c) B T (d) (e) t ) ( AN A v T t t tri v cont v vcont t 4 1 2 3 1 , o v 1 , Lr i (f) d V d V o v 圖 3.2 單極性電壓切換
d h AN V V ) (
t
(a)
0.0 0.2 0.4 0.6 0.8 1.0 1 ( 4) mf f m (mf 4) (2mf 3) ) 1 2 ( mf (2mf 1) ) 3 2 ( mf (3mf 4) ) 2 3 (mf f m 3 ) 2 3 (mf ) 4 3 ( mf d h BN V V ) (t
0.0 0.2 0.4 0.6 0.8 1.0 1 f m ) 4 (mf ) 2 (mf (mf 2) ) 4 (mf ) 3 2 ( mf ) 1 2 ( mf (2mf 1) ) 3 2 ( mf ) 4 3 ( mf ) 2 3 (mf f m 3 ) 2 3 (mf ) 4 3 ( mf -1.0 -0.2 -0.4 -0.6 -0.8 ) 2 (mf (mf 2)(b)
d h o V V ) (t
0.0 0.2 0.4 0.6 0.8 1.0 1 (2mf 3) ) 1 2 ( mf (2mf 1) ) 3 2 ( mf(c)
圖 3.3 單極性電壓切換頻譜分析3.3 電流控制
3.3.1 磁滯電流控制 PWM 磁滯控制方法可由圖 3.4(a)中一臂的電路說明之,圖中的參考電流訊號可以依照系 統需要的振幅及頻率獨自產生,由圖 3.4(b)得知,參考訊號與實測電流訊號相比較後的 誤差訊號送至磁滯控制器,產生開關控制觸發訊號,當實測電流超過上限範圍時,開關 − A T 導通,TA+截止,此造成實測電流下降;又當實測電流降至下限範圍時,開關TA+導 通,TA−截止,造成實測電流上昇。如此,可使實測電流限制在磁滯帶中,追隨著參考 電流。理論上磁滯帶越窄,脈寬調變訊號越頻繁,實測電流越近似於參考電流,此控制 方法簡單實用,但是因為切換之頻率不固定且會隨著負載變化,造成設計濾波器時,無 法決定其截止頻率,同時也必需使用頻寬較大之電流感測元件。 (a)3.3.2 定頻電流控制 PWM 定頻電流控制又稱為次諧波 PWM(Subharmonic PWM)或斜率比較 PWM(Ramp comparison PWM),如圖 3.5 所示,可用頻寬較低的電流感測元件迴授電流與參考電流 比較的誤差訊號經迴授控制器調控所產生之控制訊號vcont與一定頻定幅之三角波v 比tri 較,所得之結果做為開關的切換控制訊號,此電流控制 PWM 法克服磁滯電流控制 PWM 法非固定切換頻率的缺點。然而迴授控制須妥善設計才可成功地執行定頻電流控 制 PWM 操作。 Switch -mode converter * A i A i ib G contA v , tri v A i Current controller Comparator 圖 3.5 定頻電流控制 PWM 之控制架構 3.3.3 空白時間(dead time)影響 由參考資料[20,30]說明,以單臂反流器來說明空白時間對 PWM 反流器輸出電壓之 影響。如圖 3.6(a)所示,假設開關為理想,則單臂反流器上之二開關可以同時且瞬間一
由 on 至 off,一由 off 至 on。若 mf 夠大,控制電壓vcont在一切換週期內可以視為定值,
理想開關vcont與三角波v ,PWM 比較結果之開關信號如圖 3.6 (b)所示。 tri 考慮開關之非理想性,即其導通與截止過程均需要時間,因此同一臂上二關關切換 時間必須錯開一小段時間,稱為空白時間,以避免二開關同時在非完全導通或截止狀態 下發生短路之情況。空白時間之作法乃將每一開關由 off 至 on 之瞬間往後延遲一時間 Δ t ,如圖 3.6 (c)之開關信號所示。此空白時間tΔ大小必須配合開關之切換速度,例如較 快速之 MOSFETs 只要幾個 sμ 即可。 在此空白時間內,二開關同時截止,v 的波形視i 方向而有所變化。圖 3.6 (d)及
圖 3.6 (e)所示分別為iA> 0 與iA< 0 之vAN 波形,其中斜線部份所示為理想開關者。比較 理想之vAN 波形與實際加入空白時間者可得二者之電壓差為 ideal AN actual AN v v v∋=( ) −( ) (3.4) 將對一切換週期求平均值,可得由Δt所造成之電壓變化: ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ < + > − = Δ Δ Δ 0 0 A d s A d s AN i v T t i v T t v (3.5) (3.5)式指出:ΔvAN與電流大小無關但與電流之方向有關。此外ΔvAN 與空白時間tΔ及 切換頻率 ( 1) s s T f = 成正比,因此對於切換頻率高之情況,Δt必須儘可能地小。 應用同樣的分析方法於圖 3.7 (a)中單相反流器之臂,且利用iA =−iB可得 ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ < − > + = Δ Δ Δ 0 0 A d s A d s BN i v T t i v T t v (3.6) 由於v0 =vAN −vBN且io = ,故輸出電壓與理想波形之電壓差的平均值為 iA ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ < + > − = Δ − Δ = Δ Δ Δ 0 2 0 2 A d s A d S BN AN o i v T t i v T t v v v (3.7) 具有及不具有空白時間之瞬時平均(instantaneons average)輸出電壓v 與控制電壓o cont v 之關係如圖 3.7 (b)所示。對於vcont為正弦波之單相全橋式 PWM 反流器,其瞬時平 均輸出電壓vo(t)之波形,如圖 3.8 所示,其中負載電流i 乃假設為正弦且落後o vo(t)。由 空白時間所引起在i 電流零交越點時o vo(t)之失真將造成輸出電壓之低頻諧波(如三次、 五次、七次等)。
0 + A T tri v + A T − A T A N + A D − A D A i d v
+
t 0 t 0 t − A T cont v + A T 0 t 0 t − A T 0 t 0 t Δ t Δ t AN v AN v(
iA>0)
(
iA <0)
S T ) (a ) (b ) (c ) (d ) (e (理想) (理想) 實際 損失 理想 實際 理想 增益 圖 3.6 空白時間tΔ之效應圖 3.7 tΔ對v 的影響 o 實際 理想 圖 3.8 tΔ對正弦波輸出之影響 然而為了讓大家更了解空白時間對開關訊號的特性,本論文特地將四個開關訊號 (TA+、TA-、TB+、TB-),以及vAN、vBN、v 訊號畫出來,再以理想的開關訊號和具有o 空白時間的開關訊號做比較,以圖 3.9 來做說明,圖 3.9(a)為三角波理想的開關訊號 (iA > 0),在 mf 夠大,控制電壓vcont在一切換週期內可以視為定值,且 PWM 切換方式
為單極性電壓切換,TA+為v 和tri +vcont訊號比較下的結果,當+vcont大於v 時,TA+為tri
互為反相。在理想狀態下vAN的 on、off 時間和 TA+相同,所以vAN和 TA+的波形相同, BN v 的 on、off 時間和 TB+相同,所以vBN和 TB+的波形相同,v 的波形則為o vAN-vBN。 圖 3.9(b)為三角波具有空白時間的開關訊號(iA > 0),在圖上的斜虛線表示空白時 間,同時也表示和圖 3.9(a)的差異性,以方便大家做比較。將圖 3.9(b)的四個開關訊號 (TA+、TA-、TB+、TB-)加上空白時間,即在圖 3.9(a)的四個開關訊號(TA+、TA-、TB+、 TB-)off 到 on 的瞬間往後錯開一小段時間tΔ,如圖 3.9(b)所示,如此的話,就不會有上 下臂同時導通的問題。若iA > 0時,vAN的 on、off 時間由圖 3.9(b)的 TA+決定,所以vAN 和 TA+的波形相同,而vBN的 on、off 時間由圖 3.9(b)的 TB-決定,波形如圖 3.9(b)所示, o v 的波形則為vAN-vBN。若iA < 0時,可參考圖 3.10(b),四個開關訊號(TA+、TA-、TB+、 TB-)都不變的情狀下,圖 3.9(b)和圖 3.10(b)的差異性就在vAN此時的 on、off 時間是由圖 3.10(b)的 TA-決定,如圖 3.10(b)所示,而vBN的 on、off 時間由圖 3.10(b)的 TB+決定, 所以vBN和 TB+的波形相同,v 的波形則為o vAN-vBN。 而在iA > 0的情況下,圖 3.9(a)中的vAN和圖 3.9(b)中的vAN做比較,可以發現到圖 3.9(b)中的vAN損失了一塊 d s AN v T t v = Δ Δ ,由(8.5)式和圖 3.6(d)可知,而圖 3.9(a)中的vBN和 圖 3.9(b)中的vBN做比較,可以發現到圖 3.9(b)中的vBN增加了一塊 d s BN v T t v = Δ Δ ,由(8.6) 式可知。所以在圖 3.9(a)中的v 和圖 3.9(b)中的o V 做比較,就會相差了o Δ ,等同於在一vo 個週期內損失了二塊 d s v T tΔ ,由(3.7)式可知。同理可證,在iA < 0的情況下,圖 3.10(a) 中 的vAN 和 圖 3.10(b) 中的vAN 做 比 較 , 可 以 發 現 到 圖 3.10(b) 中的vAN 增 加 了 一 塊 d s AN v T t v = Δ Δ ,由(8.5)式可知,而圖 3.10(a)中的vBN和圖 3.10(b)中的vBN做比較,可以發 現到圖 3.10(b)中的vBN損失了一塊 d s BN v T t v = Δ Δ ,由(8.6)式可知。所以在圖 3.10(a)中的vo 和圖 3.10(b)中的v 做比較,就會相差了o Δ ,等同於在一個週期內增加了二塊vo d s v T tΔ , 由(8.7)式可知。
o v tri v cont v + cont v − 0 + TA − TA + TB − TB BN v AN v + TA − TA + TB − TB tri v cont v + cont v − 0 ) (a ) (b o v BN v AN v 圖 3.9 三角波開關訊號( >
tri v 0 + TA − TA + TB − TB + TB − TB tri v 0 ) (a ) (b cont v + cont v − cont v + cont v − + TA − TA o v BN v AN v o v BN v AN v 圖 3.10 三角波開關訊號(iA < 0):(a)理想;(b)具有空白時間
圖 3.11(a)為鋸齒角波理想的開關訊號(iA > 0),圖 3.11 (b)為鋸齒波具有空白時間 的開關訊號(iA > 0)和圖 3.12(a)為鋸齒角波理想的開關訊號(iA < 0),圖 3.12 (b)為鋸齒 波具有空白時間的開關訊號(iA < 0),本論文也將鋸齒波對空白時間的影響拿來做分 析,分析方式如同三角波(圖 3.9、圖 3.10)的分析方式相同,就不再一一陳述。 本論文還將三角波與鋸齒波的電壓輸出訊號模擬圖放上來,如圖 3.13 和圖 3.14,圖 3.13 (a)為三角波電壓輸出訊號模擬圖(iA > 0),(b)為三角波電壓輸出訊號模擬圖 (iA < 0)。圖 3.14 (a)為鋸齒波電壓輸出訊號模擬圖(iA > 0),(b)為鋸齒波電壓輸出訊號 模擬圖(iA < 0)。另外將三角波與鋸齒波的電壓輸出訊號實作圖放上來如圖 3.15 和圖 3.16,圖 3.15 (a)為三角波電壓輸出訊號實作圖(iA > 0),(b)為三角波電壓輸出訊號實作 圖(iA < 0)。圖 3.16 (a)為鋸齒波電壓輸出訊號實作圖(iA > 0)(b)為鋸齒波電壓輸出訊號 實作圖(iA < 0)。而本論文的模擬圖與實作圖的空白時間皆設為1μs。藉由模擬圖和實 作圖的對照,讓大家對空白時間應該了解的更深入。
tri v cont v + cont v − 0 + TA − TA + TB − TB + TA − TA + TB − TB tri v cont v + cont v − 0 ) (a ) (b o v BN v AN v o v BN v AN v 圖 3.11 鋸齒波開關訊號(iA > 0):(a)理想;(b)具有空白時間
tri v 0 + TA − TA + TB − TB + TA − TA + TB − TB tri v 0 ) (a ) (b cont v + cont v − cont v + cont v − o v BN v AN v o v BN v AN v 圖 3.12 鋸齒波開關訊號( <
s μ 5 tri v cont v + cont v − + TA − TA AN v BN v o v tri v cont v + cont v − + TA − TA AN v BN v o v ) (a 5μs ) (b 圖 3.13 三角波電壓輸出訊號模擬圖:(a)iA > 0;(b)iA < 0
s μ 5 s μ 5 ) (b ) (a tri v tri v cont v + cont v − cont v + cont v − + TA + TA − TA − TA AN v AN v BN v BN v o v o v 圖 3.14 鋸齒波電壓輸出訊號模擬圖:(a) > ;(b) <
A i AN v BN v o v 1A 100V 100V 100V s μ 5 A i AN v BN v o v 1A 100V 100V 100V s μ 5 ) (a ) (b 圖 3.15 三角波電壓輸出訊號實作圖:(a)iA > 0;(b)iA < 0
A i AN v BN v o v s μ 5 A i AN v BN v o v s μ 5 ) (a ) (b 圖 3.16 鋸齒波電壓輸出訊號實作圖:(a) > ;(b) <
3.4 所提電流控制器
由上一小節知,空白時間對 PWM 反流器電壓之影響極為嚴重,且對於回授電流造 成極大失真,所以本論文將提出空白時間補償控制器,將在本小節做詳細介紹。 (1) 回授控制器: 圖 3.17 為電流控制反流器供電振動機之系統組成,脈寬調變切換方式採用單極性電 壓切換控制,在考慮空白時間下,如果忽略高頻特性,則開關之切換函數可以近似為下 式: ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ + − = − + = Δ Δ ) ( * ) ˆ 1 ( 2 1 ) ( * ) ˆ 1 ( 2 1 o s tri cont B o s tri cont A i sign T t v v S i sign T t v v S (3.8) 其中,SA及SB代表第 A 臂及第 B 臂之開關函數,開關函數為 1 表開關 on,0 表開關 off。 反流器之輸出由此可表為: d B A o S S V v =( − ) (3.9) 將(3.8)式代入(3.9)式可得: ) ( * * 2 ) ( * 2 ˆ o d s cont pwm d o s tri cont o i sign V T t v k V i sign T t v v v Δ Δ Δ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = (3.10) 其中,kpwm代表反流器之脈寬調變增益。 o v o i由圖 2.1 利用 KVL,可列出反流器的電壓方程式: e Ri dt di L v o o o = + + (3.11) 又誤差訊號,經過電流控制機構G 產生的控制訊號為: cb ) (o* s o cb cont G i k i v = − (3.12) 由(3.11)及(3.12)兩式,可推得振動機電流強迫控制機構的等效方塊圖,如圖 3.18 所示。 本論文中迴授控制器G 採取 PI 控制器,即cb s k k G i p cb = + 。 s k R sL+ 1 circuit Armature Σ Σ PI Γ 1/s IA H pwm k ∗ o i ′ o i o i v a o v cont v ) (Back EMF e cb G 圖 3.18 反流器供電振動機之電流控制方塊圖 (2) 空白時間補償控制器: 考慮開關之非理想性,即其導通與截止過程均需要時間,因此同一臂上二關關切換 時間必須錯開一小段時間,稱為空白時間(dead time),以避免二開關同時在非完全導通 或截止狀態下發生短路之情況。空白時間之作法乃將每一開關由 off 至 on 之瞬間往後延 遲一時間tΔ,而往後延遲這段時間tΔ,將對輸出電流波型造成嚴重失真。 為了改善空白時間所造成的失真,可參考[30],在電流全橋供電振動機之控制系統 方塊圖中加入空白時間補償控制器如圖 3.19 所示,此控制器的目地在判別io >0時, v
vcont+Δ ,而io <0時,vcont−Δv,而Δv值說明如下,當三角波振幅為vˆ ,週期為tri T ,假s
設空白時間為tΔ,為了補償空白時間所造成的失真,Δv為(3.13)式所示,加了補償器後,
) ( ˆ 2 tri o s dtc v sign i T t v v =Δ = Δ ∗ (3.13) 加上空白時間補償後的vcont為: ) ( ˆ 2 tri o s cont cont cont i sign v T t v v v v ∗ + = Δ + = Δ (3.14) 將(3.14)式代入(3.10)式,可整理成下式: cont pwm d tri cont o V k v v v v Δ = = ˆ (3.15) 也就是說,空白時間補償後,可以完完全全的將空白時間所造成的影響消掉,使得電流 追隨效果合乎預期。而一些其它的系統參數如下所示: ) / ( 44 . 12 ) / ( 11451 ) ( 16 . 5 ) ( 221 . 0 01668 . 0 . 0 80 ) ( 81 . 0 ) ( 89 . 1 A N m N k m s N c kg m k k mH L R pwm s = Γ = ⋅ = = = = = Ω = , , , , , , , (3.16) 其中 R 和 L 是在頻率為 100Hz 所量測到的, m 為無載時的重量。操作頻率為 Hz Hz fo =5 ~2000 ,切換頻率為 fs =50kHz,tΔ =0.5μs。 s k R sL+ 1 Circuit Armature Σ Σ PI Γ 1/s pwm k ∗ o i ′ o i o i v a o v cont v ) (Back EMF e Σ r Compensato Time Dead cb G cb v dtc v v Δ + v Δ − IA H 圖 3.19 加入空白時間補償控制器之控制方塊圖
第四章
模擬驗證
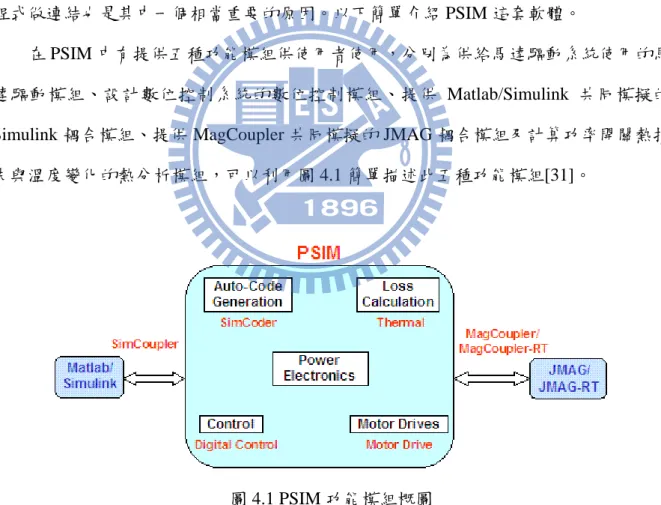
4.1 PSIM 模擬軟體
在此利用來模擬的軟體為 PSIM,這套軟體廣泛的使用在電力電子領域的研究中。 由於其簡單的操作介面,以及模擬快速的特性,使得使用者更利於在繁複的驗證中,更 快速的取得需要的資訊。 另外 PSIM 廣受電力電子領域研究所使用的原因,莫過於其內部的馬達驅動零件庫 相當豐富,以及很強的控制系統模擬能力,在頻率響應的分析方便,另外它可以和 C/C++ 程式做連結也是其中一個相當重要的原因。以下簡單介紹 PSIM 這套軟體。 在 PSIM 中有提供五種功能模組供使用者使用,分別為供給馬達驅動系統使用的馬 達驅動模組、設計數位控制系統的數位控制模組、提供 Matlab/Simulink 共同模擬的 Simulink 耦合模組、提供 MagCoupler 共同模擬的 JMAG 耦合模組及計算功率開關熱損 失與溫度變化的熱分析模組,可以利用圖 4.1 簡單描述此五種功能模組[31]。圖 4.1 PSIM 功能模組概圖
在馬達驅動模組中,由於電動機模型與控制迴路相當複雜,因此對於馬達驅動系統 設計與分析工作具有高度的挑戰性,利用 PSIM 的馬達驅動模組中的電動機模型與負載