國立交通大學
土木工程學系
碩 士 論 文
類神經網路橋梁結構延伸樁桿件之設計與
評估模式之建立
Development of Artificial Neural Network Based
Model for Bridge Extended Pile-Shafts Design
研 究 生:李綸桓
指導教授:洪士林 博士
類神經網路橋梁結構延伸樁桿件之設計與
評估模式之建立
研 究 生:李綸桓 Student:Lun-Huan Lee 指導教授:洪士林 博士 Advisor:Dr. Shih-Lin Hung
國 立 交 通 大 學 土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
June 2011
Hsinchu, Taiwan, Republic of China
類神經網路橋梁結構延伸樁桿件之設計與
評估模式之建立
研究生:李綸桓 指導教授:洪士林 博士 國立交通大學土木工程學系 摘要 橋梁延伸樁桿件為一種在美國加洲廣泛被使用的橋梁結構系統, 它直接將橋柱延伸到地表下,其地震下的破壞方式是會在地表下的樁 桿件形成一個塑性鉸。於 2006 年 6 月,Song 等人發表了一篇有關橋 梁延伸樁桿件初步耐震設計的文章,此篇文章提出了一套以結構耐震 性能為設計目標的橋梁性能設計方法,正因此方法詳盡的考慮各個設 計細節,導致其設計流程複雜且繁瑣。人工智慧(AI)中的類神經網路 是 AI 領域中重要且具學習能力的理論模式之一,並廣泛應用於不同 領域中。 因此,本研究希望利用類神經網路來建構一套橋梁延伸樁桿件輔 助設計與評估系統,以模擬人類專家完成整個設計流程。本研究共建 立了三個不同功能的類神經網路,其中一個用來輔助設計,另兩個則 用來檢驗與評估設計後的結果。首先,本研究利用 Matlab 依不同設 計參數來產生案例資料庫,並將其分為訓練與測詴案例,再將訓練案 例由多至少分成三至五組,分別使用不同訓練組別來訓練神經網路。 由測詴案例得到其相關測詴結果,並藉以驗證本系統的可行性與精確 度。驗證結果顯示網路訓練與測詴之判定係數(R2 )均達 0.9 以上。最 後,藉由執行一設計案例,證實類神經網路所建構之輔助設計與評估 系統是可行且正確的。 關鍵字:橋梁延伸樁桿件、性能目標、類神經網路。II
Development of Artificial Neural Network Based
Model for Bridge Extended Pile-Shafts Design
Student:Lun-Huan Lee Advisor:Dr. Shih-Lin Hung
Department of Civil Engineering, College Engineering National Chaio Tung University
Abstract
A common type of bridge foundation uses the so-called“extended pile-shafts”, where the circular column is continued below the ground level. Under the design level earthquake, however, extended pile-shafts for bridges may be expected to experience some level of damage below the ground level. A design procedure that incorporates soil properties into the process was developed by Song et al on 2006. The seismic design of extended pile-shafts requires a careful consideration of all the details, so the procedure was complicated and experience oriented. Artificial neural network (ANN), one of well-developed models in Artificial Intelligence (AI), is a learning-capability computing model and being widely used in different areas.
The aim of this work is to develop an ANN-based model for bridge extended pile-shafts design, to simulate the human experts to complete the entire design process. Three ANN sub-models were established. One for aided design and the other two are intended to test and assess the results. First, a case base about one million cases was created according to different design parameters using Matlab, and the cases were divided into training and test cases. The training cases were then randomly divided into three to five groups to test the learning performance of these sub-ANN models. The training results revealed the feasibility of these
models. Meanwhile, validation results revealed that the coefficients of determination(R2) were more than 0.9 for these models in training and testing. Finally, a complete design case was employed to test the feasibility and performance of the developed ANN-based bridge extended pile-shafts design model. The results confirmed that the system is feasible and the results are correct and engineering acceptable.
Keywords:Extended pile-shafts, Performance-based objective, Artificial neural network(ANN).
IV
誌謝
研究所階段即將來到尾聲,在交大兩年的磨鍊讓我成長許多,學 到許多的科學知識與做研究的方法,其中我認為對我收穫最多的則是 培養了我獨立思考的方式,而在做論文期間,經歷了很多困難,很高 興最後也能順利通過,其中要感謝的人首先為指導教授洪士林老師, 以及宋欣泰老師、詹君治學長,在我研究中遇到問題時,他們總是不 吝其煩的指導我、幫助我。 再來要感謝的是研究室的大家庭們,博班學長子軒、勇奇、玉邦, 以及學長姐志銘、彥伶、冠豪、夙修、麗松、家孙、穎泰,帶領我進 入研究所的生活,在我對未來感到疑惑時能適時的給我建議和方向, 同學思伶、江祥、孟軒、隔壁間的承澤和 417 的朋友們,在這裡和我 一同打拼,使我兩年的求學路途中有伴相隨,學弟宣治、俊佐、晟佑, 有你們的加入,使研究室的生活熱鬧不少。求學以來幸運的我在每個 階段及每個領域都有一些的好朋友相伴,我要感謝你們為我的生活增 添許多色彩,同時你們也都是扶持我的力量。 最後最重要的是要感謝我的父母、伯父伯母、爺爺奶奶,以及所 有愛護我的親戚們、兄弟姊妹,我想在我這一路上的求學路程,你們 的支持與鼓勵是我最大的動力,感激之情已難以言表,因為沒有你們 就沒有今天的我。然後,僅以此論文獻給所有愛我及我愛的人。目錄
摘要 ... I Abstract ... II 誌謝 ... IV 目錄 ... V 表目錄 ... VII 圖目錄 ... VIII 第一章 緒論 ... 1 1.1 研究背景 ... 1 1.2 研究動機 ... 2 1.3 研究目的 ... 3 1.4 論文章節及架構 ... 3 第二章 文獻回顧 ... 5 2.1 橋梁延伸樁桿件發展 ... 5 2.2 橋梁延伸樁桿件設計中引用的文獻 ... 6 2.3 類神經網路的發展 ... 7 2.4 類神經網路應用相關文獻 ... 9 第三章 研究方法 ... 11 3.1 橋梁延伸樁桿件設計流程 ... 11 3.2 類神經網路 ... 18 3.2.1 生物神經元 ... 18 3.2.2 人工神經元 ... 19 3.2.3 類神經網路架構 ... 19 3.2.4 類神經網路如何運作 ... 20 3.2.5 學習規則 ... 20VI 3.3 倒傳遞網路 ... 21 3.3.1 倒傳遞網路架構 ... 22 3.3.2 倒傳遞演算法 ... 23 3.3.3 倒傳遞演算法種類 ... 25 第四章 系統架構與結果 ... 26 4.1 類神經網路設計 ... 26 4.2 類神經網路的設計參數 ... 28 4.3 設計參數的界限 ... 29 4.4 倒傳遞網路架構 ... 30 4.5 訓練與測詴結果 ... 31 4.5.1 類神經網路 A ... 32 4.5.2 類神經網路 B ... 35 4.5.3 類神經網路 C ... 38 4.5.4 實際執行設計案例 ... 42 第五章 結論與建議 ... 45 5.1 結論 ... 45 5.2 建議 ... 46 參考文獻 ... 47 附表 ... 50 附圖 ... 54
表目錄
表 3-1 圓柱鋼筋比計算公式(採 Everard [15]方法) ... 50 表 4-1 鋼筋尺寸相關資料... 51 表 4-2 類神經網路的訓練案例數目與測詴案例數目 ... 52 表 4-3 三個類神經網路的架構型式 ... 52 表 4-4 三個類神經網路的網路計算值與期望值比較 ... 53VIII
圖目錄
圖 1-1 樁基礎(a)與橋梁延伸樁桿件(b) ... 54 圖 1-2 利用相當於固定端懸臂樑的概念 ... 54 圖 2-1 將樁桿件的反應分成三種界線(採用 Song [7]之圖) ... 55 圖 2-2 橋梁延伸樁桿件設計流程圖(採用 Song 等人 [5]之圖) ... 56 圖 3-1 地震反應譜(採用[13]方法) ... 57圖 3-2 pga/pgv 與(pga×pgd)/pgv2比值 (採用 PEER 數據,引用[5]) . 58 圖 3-3 橋梁延伸樁桿件(採用 Song 等人 [5]之圖) ... 59 圖 3-4 生物神經元 ... 60 圖 3-5 人工神經元 ... 60 圖 3-6 轉移函數 ... 61 圖 3-7 類神經網路架構圖... 62 圖 3-8 倒傳遞網路架構─多層前饋網路 ... 62 圖 4-1 類神經網路 A 的設計概念 ... 63 圖 4-2 類神經網路 B 的設計概念 ... 64 圖 4-3 類神經網路 C 的設計概念 ... 65 圖 4-4 類神經網路橋梁延伸樁桿件輔助設計與評估系統 ... 66 圖 4-5 類神經網路 A 輸入參數與輸出參數 ... 67 圖 4-6 類神經網路 B 輸入參數與輸出參數 ... 68 圖 4-7 類神經網路 C 輸入參數與輸出參數 ... 69 圖 4-8 類神經網路 A 倒傳遞網路架構及採用的轉移函數 ... 70 圖 4-9 類神經網路 A 神經數目與 R 值比較 ... 70 圖 4-10 類神經網路 B 倒傳遞網路架構及採用的轉移函數 ... 71 圖 4-11 類神經網路 B 神經數目與 R 值比較 ... 71
圖 4-12 類神經網路 C 倒傳遞網路架構及採用的轉移函數 ... 72 圖 4-13 類神經網路 C 神經數目與 R 值比較 ... 72 圖 4-14 類神經網路 A-訓練案例數 5061-訓練收斂圖 ... 73 圖 4-15 類神經網路 A-訓練案例數 5061-R 值結果 ... 73 圖 4-16 類神經網路 A-訓練案例數 5061-測詴結果相對誤差圖 ... 74 圖 4-17 類神經網路 A-訓練案例數 5061-測詴結果迴歸曲線圖 ... 75 圖 4-18 類神經網路 A-訓練案例數 9207-訓練收斂圖 ... 76 圖 4-19 類神經網路 A-訓練案例數 9207-R 值結果 ... 76 圖 4-20 類神經網路 A-訓練案例數 9207-測詴結果相對誤差圖 ... 77 圖 4-21 類神經網路 A-訓練案例數 9207-測詴結果迴歸曲線圖 ... 78 圖 4-22 類神經網路 A-訓練案例數 18812-訓練收斂圖 ... 79 圖 4-23 類神經網路 A-訓練案例數 18812-R 值結果... 79 圖 4-24 類神經網路 A-訓練案例數 18812-測詴結果相對誤差圖 ... 80 圖 4-25 類神經網路 A-訓練案例數 18812-測詴結果迴歸曲線圖 ... 81 圖 4-26 類神經網路 A-訓練案例數 31351-訓練收斂圖 ... 82 圖 4-27 類神經網路 A-訓練案例數 31351-R 值結果... 82 圖 4-28 類神經網路 A-訓練案例數 31351-測詴結果相對誤差圖 ... 83 圖 4-29 類神經網路 A-訓練案例數 31351-測詴結果迴歸曲線圖 ... 84 圖 4-30 類神經網路 A-訓練案例數 62866-訓練收斂圖 ... 85 圖 4-31 類神經網路 A-訓練案例數 62866-R 值結果... 85 圖 4-32 類神經網路 A-訓練案例數 62866-測詴結果相對誤差圖 ... 86 圖 4-33 類神經網路 A-訓練案例數 62866-測詴結果迴歸曲線圖 ... 87 圖 4-34 類神經網路 A–不同訓練案例數平均相對誤差比較圖 ... 88 圖 4-35 類神經網路 A–不同訓練案例數最大相對誤差比較圖 ... 88 圖 4-36 類神經網路 A–不同訓練案例數 R2比較圖 ... 89
X 圖 4-37 類神經網路 B-訓練案例數 1130-訓練收斂圖 ... 90 圖 4-38 類神經網路 B-訓練案例數 1130-R 值結果 ... 90 圖 4-39 類神經網路 B-訓練案例數 1130-測詴結果相對誤差圖 ... 91 圖 4-40 類神經網路 B-訓練案例數 1130-測詴結果迴歸曲線圖 ... 91 圖 4-41 類神經網路 B-訓練案例數 4678-訓練收斂圖 ... 92 圖 4-42 類神經網路 B-訓練案例數 4678-R 值結果 ... 92 圖 4-43 類神經網路 B-訓練案例數 4678-測詴結果相對誤差圖 ... 93 圖 4-44 類神經網路 B-訓練案例數 4678-測詴結果迴歸曲線圖 ... 93 圖 4-45 類神經網路 B-訓練案例數 11509-訓練收斂圖 ... 94 圖 4-46 類神經網路 B-訓練案例數 11509-R 值結果 ... 94 圖 4-47 類神經網路 B-訓練案例數 11509-測詴結果相對誤差圖 ... 95 圖 4-48 類神經網路 B-訓練案例數 11509-測詴結果迴歸曲線圖 ... 95 圖 4-49 類神經網路 B–不同訓練案例數平均相對誤差比較圖 ... 96 圖 4-50 類神經網路 B–不同訓練案例數最大相對誤差比較圖 ... 96 圖 4-51 類神經網路 B–不同訓練案例數 R2比較圖 ... 97 圖 4-52 類神經網路 C-訓練案例數 5061-訓練收斂圖 ... 98 圖 4-53 類神經網路 C-訓練案例數 5061-R 值結果 ... 98 圖 4-54 類神經網路 C-訓練案例數 5061-測詴結果相對誤差圖 ... 99 圖 4-55 類神經網路 C-訓練案例數 5061-測詴結果迴歸曲線圖 ... 100 圖 4-56 類神經網路 C-訓練案例數 9207-訓練收斂圖 ... 101 圖 4-57 類神經網路 C-訓練案例數 9207-R 值結果 ... 101 圖 4-58 類神經網路 C-訓練案例數 9207-測詴結果相對誤差圖 ... 102 圖 4-59 類神經網路 C-訓練案例數 9207-測詴結果迴歸曲線圖 ... 103 圖 4-60 類神經網路 C-訓練案例數 18812-訓練收斂圖 ... 104 圖 4-61 類神經網路 C-訓練案例數 18812-R 值結果 ... 104
圖 4-62 類神經網路 C-訓練案例數 18812-測詴結果相對誤差圖 .... 105 圖 4-63 類神經網路 C-訓練案例數 18812-測詴結果迴歸曲線圖 .... 106 圖 4-64 類神經網路 C-訓練案例數 31351-訓練收斂圖 ... 107 圖 4-65 類神經網路 C-訓練案例數 31351-R 值結果 ... 107 圖 4-66 類神經網路 C-訓練案例數 31351-測詴結果相對誤差圖 .... 108 圖 4-67 類神經網路 C-訓練案例數 31351-測詴結果迴歸曲線圖 .... 109 圖 4-68 類神經網路 C-訓練案例數 62866-訓練收斂圖 ... 110 圖 4-69 類神經網路 C-訓練案例數 62866-R 值結果 ... 110 圖 4-70 類神經網路 C-訓練案例數 62866-測詴結果相對誤差圖 .... 111 圖 4-71 類神經網路 C-訓練案例數 62866-測詴結果迴歸曲線圖 .... 112 圖 4-72 類神經網路 C–不同訓練案例數平均相對誤差比較圖 ... 113 圖 4-73 類神經網路 C–不同訓練案例數最大相對誤差比較圖 ... 113 圖 4-74 類神經網路 C–不同訓練案例數 R2比較圖 ... 114
1
第一章 緒論
1.1 研究背景
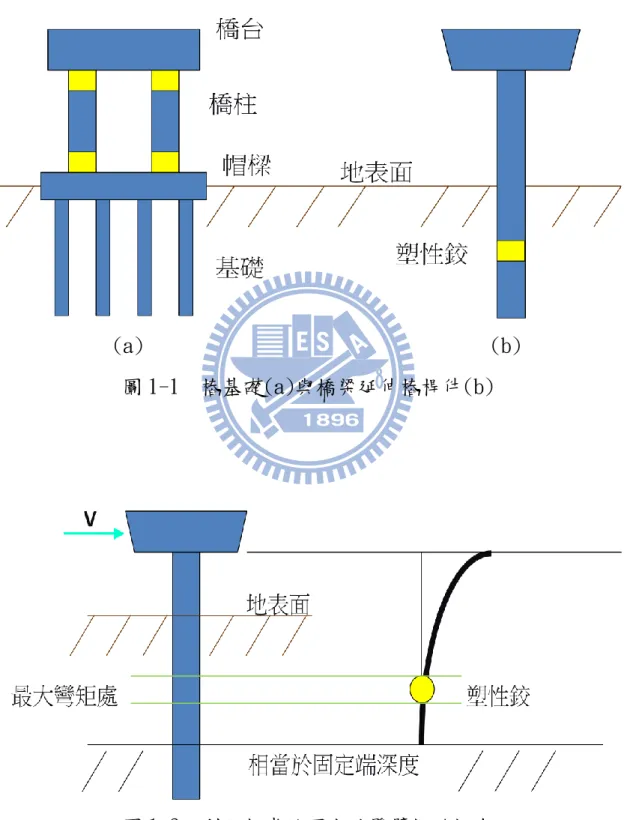
在台灣一般常見的橋梁結構,在底部會設置某種形式的橋梁基礎, 如樁基礎(圖 1-1(a))、沉箱或井式基礎等,而其作用是用以承受上部 結構傳來的全部荷載,並將它們傳至岩盤。但是在以往的經驗中,發 現在遭受嚴重的地震時,此橋梁結構系統容易在交接處產生破壞,如: 橋台與橋柱或橋柱與帽梁的交接處,如圖 1-1(a)淺色部分。既然無法 避免這種破壞情形,許多新的設計策略相繼被提出,其中在美國加洲, 就有一種被廣泛使用的橋梁結構系統能夠避免這種破壞方式,此種結 構系統與台灣一般常見的橋梁基礎不同,它直接將橋柱延伸到地表下, 稱為橋梁延伸樁桿件(如圖 1-1(b)),而橋梁延伸樁桿件在地震下的破 壞方式則是會在地表下的樁桿件形成一個塑性鉸,如圖 1-1(b)淺色部 分所示。橋梁延伸樁桿件的優點除了避免在交接處產生破壞外,還有 跟其它橋梁基礎作比較的話,它的成本效率較佳,對於在城市內或有 限制條件的建設地區時,挖掘造成現地的擾動也較小。 在 2002 年,Chai [1]利用了相當於固定端懸臂梁的概念(如圖 1-2), 建立一個解析模型,用以評估當結構物受側推力時,降伏桿件的局部 韌性需求。同年,Chai 等人 [2]用實驗數據來與此解析模型做比較。 Hutchinson 等人(2002) [3]使用了非線性動力有限元素分析橋梁延伸 樁桿件結構物。2003 年 Chai 和 Song [4]評估橋梁延伸樁桿件在遭受 地震後的性能表現,比較了結構性質與土壤性質對於曲率韌性需求之 間的影響。在 2006 年 6 月, Song 等人 [5]發表了一篇有關橋梁延伸 樁桿件初步耐震設計的文章,此篇文中提出了一套以結構耐震性能為設計目標的橋梁性能設計方法,此方法除了考慮結構因素外,更考慮 了周圍土壤對整體結構物造成的影響,故設計步驟中包含了許多有關 土壤性質的計算公式。正因此方法詳盡的考慮各個設計細節,導致其 設計流程複雜且包含了一個兩層的巢狀迴圈,最後整個設計流程是否 完成,依據的是結構耐震性能有無滿足規範之規定。
1.2 研究動機
從上一節敘述可知,整個橋梁延伸樁桿件設計流程是相當複雜的, 除了包含一個兩層巢狀迴圈外,其兩層迴圈也都有可能發生設計失敗, 所以設計流程更需要重複的進行,而外層迴圈收斂條件是依據結構耐 震性能有無滿足相關規範等規定,假若未能滿足規範之規定,則整個 設計流程必頇重新修正初始設計參數,才能繼續進行,如此一來,若 要能滿足結構耐震性能目標,多次的修正初始設計參數是必要而且費 時的。且由於設計流程中採用了許多結構與大地的專業知識,因此對 於一些缺乏相關經驗的工程師,該如何來決定初始設計參數是一大難 題,相信他們可能需要花上更多次的嘗詴才能完成設計流程。 人工智慧(AI)是一種模擬人類思考、分析、決策等行為的電腦系 統,其目的是讓電腦或機器具有人類的運用知識、學習或推理判斷的 能力而來解決問題。而人工智慧中的類神經網路更是 AI 領域中重要 的理論模式之一,且廣泛應用於不同領域中。因此,希望利用 AI 中 的類神經網路來建構一套輔助設計與評估系統,模擬人類專家完成整 個設計流程。3
1.3 研究目的
接續上述之動機,本研究之目的係先了解 Song 等人提出的橋梁 延伸樁桿件設計方法及其設計理論與步驟,並再深入探討利用類神經 網路模擬整個設計流程的可行性。本研究藉由類神經網路來建構一套 橋梁延伸樁桿件輔助設計與評估系統,以模擬人類專家完成整個設計 流程。其中本研究共建立了三個不同功能的類神經網路,其中一個用 來輔助設計,另兩個則用來檢驗與評估設計後的結果。 首先,本研究利用 Matlab 依不同設計參數來產生案例資料庫,並 將其分為訓練與測詴案例,再將訓練案例由多至少分成三至五組,分 別使用不同訓練組別來訓練神經網路,由測詴案例得到其相關測詴結 果,並藉以驗證本系統的可行性與精確度。最後,藉由執行設計案例, 來證實類神經網路所建構之輔助設計與評估系統是否可行且正確 的。1.4 論文章節及架構
本研究論文之架構分為五個章節: 第一章為緒論,引進本論文之主題,並說明其研究背景,接著概 述寫此論文的動機及目的。 第二章為文獻回顧,介紹歷年來與本研究的相關文獻,先介紹橋 梁延伸樁桿件的相關文獻,接著指出橋梁性能設計步驟中所引用的文 獻,再來為類神經網路的近年發展,最後介紹本研究室利用類神經網 路的相關應用。第三章為研究方法,首先將介紹初步耐震橋梁延伸樁桿件設計流 程。大略說明每一步驟之主要設計過程,接著介紹類神經網路的基本 原則與運作方式,然後指出倒傳遞網路的架構與倒傳遞演算法的概 念。 第四章為系統架構與結果,為研究步驟的說明和所獲得之成果的 整理,首先決定出類神經網路的網路架構及相關參數,分析各神經網 路的輸入參數與輸出參數。再利用 Matlab 產生案例資料庫,分為訓 練案例與測詴案例,最後,將其結果彙整與討論。 第五章為結論與建議,此章將對本研究的結果提出結論與建議。 最後為本論文之附錄,在整本論文中所提及的各種圖形、表格、 參考資料等都將置於此部分供讀者參閱。
5
第二章 文獻回顧
本章主要可分為四大部分:首先為介紹橋梁延伸樁桿件的相關文 獻,接著指出耐震橋梁延伸樁桿件設計流程中所參考的文獻,再來則 為類神經網路近年來的發展,最後為本研究室有關類神經網路應用方 面的相關文獻。2.1 橋梁延伸樁桿件發展
橋梁延伸樁桿件是將橋柱直接延伸到地底下的橋梁結構物。雖然 此種結構物在美國加洲被廣泛的使用,但是目前來說,是較有限的文 獻可以利用的。缺少了相關的研究,此種結構物在地震後的反應變得 無法確定,因此,結構物的安全性也就沒辦法有保障。但是在 2000 年後,相關的研究陸續地出現。 2002 年 Chai [1] 利用了相當於固定端懸臂梁的概念,建立一個解 析模型,用以評估當結構物受側推力時,降伏桿件的局部韌性需求。 此文中假設發生最大彎矩的深度在相當於固定端深度之上,如圖 1-2, 也用樁桿件的彎矩強度和土壤的側向力分佈狀況來計算結構物的側 推強度。更藉由假設在最大彎矩處會形成一個集中塑鉸,而建立一個 有關位移韌性需求和曲率韌性需求的運動方程式。因此,可由此方程 式來評估樁桿件的破壞程度。2002 年 Chai 等人 [2]做了相關實驗, 用來調查鋼筋混凝土柱的韌性容量與側推強度,並將此數據拿來與其 解析模型做比較。於 2002 年由 Hutchinson 等人 [3]使用了非線性動 力有限元素分析橋梁延伸樁桿件結構物,並分析了土壤性質對整體樁 桿件系統造成的影響。2003 年 Chai 和 Song [4]的研究中,評估橋梁 延伸樁桿件在不同的位移韌性需求、不同的土壤情況下,其耐震性能的情形。也將結構性質,如地面上的樁桿件高度、樁直徑、縱向鋼筋 比、軸向力,和土壤性質,如黏性土壤的不排水剪力強度、非黏性土 壤的摩擦角,比較這些因素跟曲率韌性需求之間的影響。2005 年 Song [6]使用了一種非線性分析方法,將上端為固定的樁桿件,受側推力 後的反應,分成三種極限狀態來做分析及評估其性能表現,如圖 2-1。 2005 年 Song 等人 [7]提出解析模型來分析上端為固定的樁桿件,也 評估其曲率韌性需求。 Song 等人 [5]於 2006 年提出初步耐震橋梁延伸樁桿件設計的方 法,在方法中仔細的評估周遭土壤對於整體結構物造成的影響,因此 在設計步驟中包含了許多有關土壤性質的計算公式。也採用了可靠的 方法,來決定結構物的側推強度。設計步驟中包含了疊代的程序來抵 達設計目標,輸出結果為側推勁度、側推強度、局部曲率韌性需求、 水平位移比…等,這些參數可以用來確保結構反應是否安全。總之, 它是一個以結構耐震性能為設計目標的橋梁性能設計方法。2008 年 Song [8]評估多柱式的橋梁延伸樁桿件受側向地震力後的性能表現。 2008 年 Song 和 Chai [9]提出以位移韌性為設計目標的耐震橋梁延伸 樁桿件設計。
2.2 橋梁延伸樁桿件設計中引用的文獻
介紹2006年Song等人 [5]提出的耐震橋梁延伸樁桿件設計流程 中所參考的文獻,其流程圖如圖2-2(採用Song等人 [5]之圖)。 首先,在此只先提出有使用到參考文獻的步驟,其它步驟暫先略 過。在一開始決定土壤性質中的分類時,黏性土壤和非黏性土壤的依7 據分別為不排水剪力強度(su)和有效摩擦角(Φ),其中水平反力模數(kh) 可以藉由不排水剪力強度(su)來估計,Davisson [10]的研究指出kh=67su。 而ATC-32 [11]指出水平反力模數(nh) 可以使用有效摩擦角(Φ)來估 算。 在步驟二中,採用NEHRP [12]地震反應譜,取Vidic等人 [13]放 大因子ca=2.5, cv=2.0, cd=1.8, 5%阻尼,接著,藉由已知該地區的最大
地表加速度(pga),利用PEER Strong Motion [14]資料比值,根據不同 土壤來決定最大地表速度(pgv),最大地表位移(pgd),進而決定出 Spaa(pseudo-spectral-absolute-acceleration)。在步驟三中,利用Vidic等 人 [13] 提出的公式來決定力量折減因子(R)。在步驟四中,Chai [1] 的研究指出根據不同的土壤性質,使用不同的公式,可以來決定最大 彎矩深度(Lm)和樁桿件所承受的彎矩強度(Mu)。在步驟五中,採用 Everard [15]提出決定縱向鋼筋比的方法。在步驟六中,利用Kowalsky 等人 [16]提出的公式來計算有效面積慣性矩 (Ie)。 在步驟七中,採 用Chai [1]提出的方法來獲得彈性勁度Ksp。在步驟九中,利用Chai [1] 提出的公式來計算曲率韌性因子(μΦ),利用Hutchinson等人[3]提出的 公式來計算水平位移比(γu)。
2.3 類神經網路的發展
為了在語音及影像辨認獲至與人腦相似的功能,自1940年起,科 學家即著手從事此方面的研究,仿造最簡單的神經元模式,開始建立 最原始的類神經網路(Artificial Neural Network,ANN) 。而有關類神 經 網 路 發 展 歷 史 , 可 參 考 Anderson 和 Rosenfeld 在 1989 年 合 著 的“Neurocomputing: Foundations of Research“ [17]一書。以下摘要出 重要的歷史發展。 在1943年,心理學家McCulloch和數學家Pitts,介紹了第一個神經 元數學模型,在這裡神經元的輸入信號加權和與閥值比較再決定神經 元是否輸出。這是在那時候對計算元素認識的基礎上,第一次對大腦 工作原理描述的嘗詴。他們證明了簡單的神經網路可以計算任何數學 和邏輯函數,也是他們共同提出了神經元最早的數學模式(即MP模式), 開創了腦神經科學理論研究的時代。在1958年Rosenblatt首先引用感 知器觀念來模擬大腦感知和學習兩大能力,並受到人們的廣泛注意。 而感知器是由具活化轉移函數的神經元組成的層狀網路,它具有學習 功能。在1969年,Minsky和Papert合著的“Perceptron”,一本劃時代 的著作,其中包含了對什麼樣的感知機能夠學習這一問題的嚴密研究。 感知機的形式化處理不僅要解釋感知機的限制性,並且要指明克服它 們的方向。也指出由於感知器結構上的限制,使它不能產生複雜的邏 輯函數。最後,該書悲觀地預言感知機的限制性說明神經網路研究方 向是行不通的,而受到Minsky在M.I.T.學術地位的影響,類神經網路 的研究從該書發表後就一直陷入低潮無所進展。 所幸在1962年Widrow提出所謂的適應性線性元件(Adaline),由於 它是一種線性網路,而且具有適應學習能力,在訊號處理與系統識別 等領域受到廣泛的重視和應用。另外,在此挫折時期(1967年~1982年), 依然有不少學者從事類神經網路方面的研究,例如,Kohonen提出了 自組織映射圖(SOM)的網路,Grossberg提出了適應性共振理論(ART) 的網路等等,還有許多其他學者的共同努力,為類神經網路以後的發 展奠下了堅固的基礎。到了1980年代初期,著名的物理學家Hopfield
9
提出了HNN網路,他在此網路中首先引用了能量函數的觀念,為判 定網路的穩定性給了依據。Hopfield的研究論文推動了類神經網路的 研究。此後,美國國防的DARPA計劃更是大大地推動了類神經網路 的 研 究 和 進 展 。 當 1986 年 , Rumelhart 和 McClelland 共 同 編 著 的 “Parallel Distributed Processing: Explorations in the Microstructure of Cognition”[18]一書發表後,更是將類神經網路的研究帶入了新的里 程碑,書中所提的倒傳遞網路更是目前最廣為使用的網路,也是本論 文中將採用的網路。至此,類神經網路已進入了蓬勃發展階段。
2.4 類神經網路應用相關文獻
目前人工智慧中的類神經網路已經有許多成功的替代方法或是提供 相關經驗的輔助系統,以下介紹本研究室歷年來應用類神經網路的相 關文獻,如賴鴻成 [21]建立一個類神經網路學習模式,來解決混凝 土配比與抗壓強度間的問題。高清雲 [22]發展一個採用主動控制來 控制一個受動力擾動結構物的可調式神經控制器,其中包括了兩個部 分:(1)神經模擬網路:模擬受到控制的結構物行為。(2)神經行為網 路:決定施加在結構物上的控制力。李金進 [23]利用類神經網路來 發展一套新的最佳化結構主動控制理論。陳彥伶 [20]利用類神經網 路模式來模擬五樓~十樓的房屋結構設計之容量震譜系統,將來在進 行多目標最佳化設計時,由此類神經網路模式產生相同之容量震譜, 即可免去複雜的數值分析流程。呂夙修 [19]建立一套電腦輔助設計 混凝土配比的機制,提供使用者所需目標的混凝土配比,且提供多樣 的配比設計,讓不同環境下的使用者,依自身的需求使用不同的混凝 土配比設計,並利用電腦技術建立混凝土的強度模型及坍度模型,以此輔助設計並補充資料庫中缺乏的配比組合資料。當然還有其他相關 運用類神經網路等文獻,在此不加贅述。
11
第三章 研究方法
本章為介紹本研究中所使用的方法,首先將介紹初步耐震橋梁延 伸樁桿件設計的步驟及流程,第二部分則介紹類神經網路的基本概念 與運作方式,最後將介紹類神經網路中目前最廣為使用的網路─倒傳 遞網路,也是本論文主要使用的網路。3.1 橋梁延伸樁桿件設計流程
本篇論文主要採用Song等人 [5]於2006年提出的初步耐震橋梁延 伸樁桿件設計流程。在此介紹其設計流程,其流程圖如圖2-2。首先, 在開始設計流程之前,以下各參數為整個設計流程的已知條件,如 下: a.結構性質:樁桿件在地面上的高度(La)、上部結構的質量(m) 、 混凝土楊氏模數(E) 、混凝土壓力強度(fc’) 、縱向 鋼筋降伏強度 (fy) 、縱向鋼筋直徑(db)。 b.土壤性質:主要分為兩類。 (Ⅰ)黏性土壤─不排水剪力強度(su),水平反力模數kh估計 為kh=67su [10] (Ⅱ)非黏性土壤─有效摩擦角(Φ),水平反力模數nh可以 使用有效摩擦角(Φ)來估算 [11] 設計步驟依序如下: 步驟一: a.選擇樁桿件直徑(D)和系統彈性週期(Tn),其中限制條件如下:, , (3-1) 接著,根據ACI 318-02規範規定縱向鋼筋比(ρ)的上下限(0.75%和 4%)來找出最小系統彈性週期(Tmin)與最大系統彈性週期(Tmax),並 使Tmin≦Tn ≦Tmax。 b.決定彈性勁度 (3-2) 步驟二: a.獲得地震反應譜,如圖3-1(採用[13]方法) b.使用Vidic T. [13]提出的放大因子ca=2.5, cv=2.0, cd=1.8, 5%阻尼 。
然 後 , 藉 由 已 知 該 地 區 的 最 大 地 表 加 速 度 (pga, peak ground acceleration),採用PEER Strong Motion資料比值,引用[5]如圖3-2, 根據土壤類別 SE、SD、SC、SB、SA,選取各自pga/pgv比值和
(pga×pgd)/pgv2比值,因而決定出最大地表速度(pgv, peak ground velocity),最大地表位移(pgd, peak ground displacement),接著, 根據系統彈性週期(Tn)介於的區間 [13] 。 (3-3) (3-4) (3-5)
13 其中, (3-6) (3-7) 最後決定出 Spaa(pseudo-spectral-absolute-acceleration)。 步驟三: a.選擇位移韌性因子(μΔ )(ATC-32[11]建議從μΔ=3開始) b.根據Tn所在的範圍來決定力量折減因子( R) [15] (3-8) 其中, (3-9) 步驟四: a.獲得極限側推力 (3-10) b.根據土壤性質來決定最大彎矩深度(Lm)和樁桿件的所承受的彎 矩強度(Mu) [1],如圖3-3(採用Song [5]之圖),如下: (Ⅰ)黏性土壤─ 最大彎矩深度(Lm) (3-11)
其中, (3-12) 彎矩強度(Mu) (3-13) (Ⅱ)非黏性土壤─ 最大彎矩深度(Lm) (3-14) 其中, (3-15) 彎矩強度(Mu) (3-16) 步驟五: 使用(方法採Everard [15],公式參考表3-1)類似詴誤法的方式經由 不斷嘗詴找出合適的縱向鋼筋比 步驟六: 計算有效面積慣性矩 Ie [16]
15 (3-17) 步驟七: 根據土壤性質來決定彈性勁度(Ksp) [1] ,如下: (Ⅰ)黏性土壤─ 特徵值長度(Rc) (3-18) (3-19) 彈性勁度(Ksp) (3-20) (Ⅱ)非黏性土壤─ 特徵值長度(Rn) (3-21) (3-22) 彈性勁度(Ksp) (3-23) 步驟八:
a.比較Ko與Ksp誤差,若誤差>5%,則修正 ,使用公式 ,然後回步驟三。 b.比較Ko與Ksp誤差,若誤差<5%,則往步驟九。 步驟九: 計算以下之值: 降伏位移(Δy) (3-24) 極限位移(Δu) (3-25) 曲率韌性因子(μΦ) [1] (3-26) 其中, (3-27) (Ⅰ)黏性土壤─ (3-28) (Ⅱ)非黏性土壤─ (3-29)
17 水平位移比(γu ) [3]
(3-30)
而最後整個設計流程完成,依據的是結構耐震性能有無滿足規範 之規定。在此設計流程中,結構性能的安全檢查,主要是在檢查位移 韌性需求(displacement ductility demand, μΔ)、縱向鋼筋比(longitudinal
reinforcement ratio, ρ)、水平位移比(drift ratio, γu)與曲率韌性需求
(curvature ductility demand, μΦ)。其中各安全範圍的定義如下:
位移韌性需求─ ATC-32[11]規範規定 μΔ≦3。且≧1。 縱向鋼筋比─ ACI 318-02 規範規定 0.75%≦ρ≦4%,鋼筋量太小會 發生突然性開裂破壞,太大則會產生壓力破壞。 水平位移比─使用混凝土柱當作支撐的橋梁結構物,在遭受地震後, 若殘餘位移比(residual drift)≧1.75%會使橋梁結構物無 法修復而頇拆除,因此,在 1995 年,日本道路協會(Japen Road Association)規定殘餘位移比≦1%作為設計準則 。而研究[3]指出為了限制殘餘位移比≦1%,所以水平 位移比必頇≦8%。 曲率韌性需求─視材料斷面性質而決定出曲率韌性容量。 a.若結構耐震性能檢查不通過,則修改樁桿件直徑(D)或系統彈性 週期(Tn),返回步驟一重新進行。 b. 若結構耐震性能檢查通過,則設計完成。
3.2 類神經網路
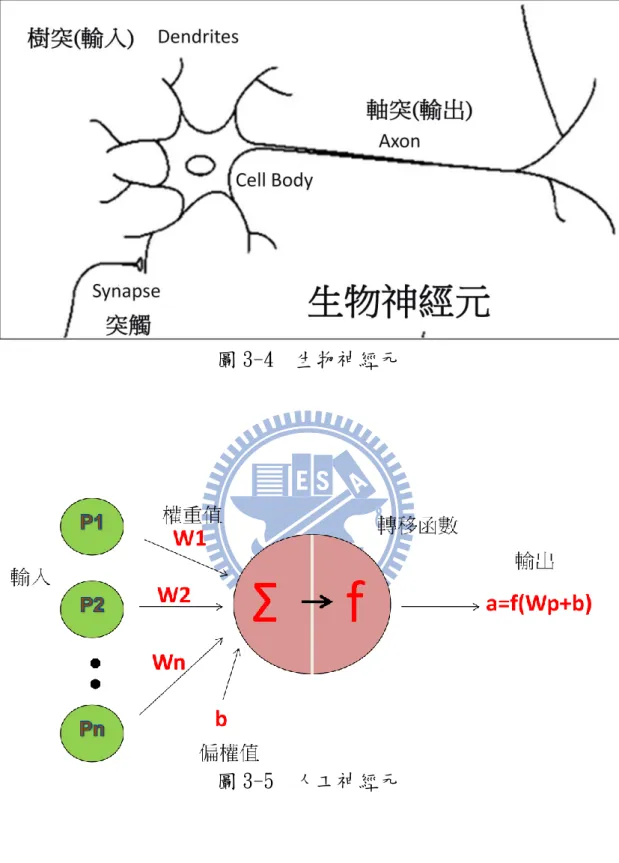
要了解大腦是如何思考運作的,就必頇要知道生物神經網路的奧 秘,而類神經網路就是人類製造出來的,用來模仿生物神經網路的資 訊處理系統,因此,要了解類神經網路就必頇先了解生物神經網路, 生物神經網路是由許許多多約 1011個神經細胞,又稱為神經元(Neuron) 所組成的,神經元是腦組織的基本單元,如圖 3-4,標示出神經元的 主要部分名稱。接下來就要簡單介紹神經元內部運作的機制。3.2.1 生物神經元
當外界各種不同形式的資訊或能量訊號(例如,聲、光、電、熱 等等刺激),透過感官器官轉換成電的訊號後,便會進入神經細胞中, 而在神經元內此輸入訊號是經由突觸(Synapse)間內部電位變化後,透 過樹突(Dentrites)傳送至細胞本體(Soma),再由軸突(Axon)傳送到樹突, 成為下一個神經元的輸入訊號。其中,突觸內的影響強度就是生物神 經網路儲存資訊的地方,生物神經網路的學習就是在調節突觸的強度。 因此,我們可以說樹突是細胞的輸入路徑,透過細胞本體間許許多多 聯絡的突觸來接受周圍細胞本體所傳出的訊號,那麼軸突就相當於細 胞本體的輸出路徑。19
3.2.2 人工神經元
而類神經網路則是利用生物神經元的概念,創造出了人工神經元, 如圖 3-5。其中,輸入(P)乘上權重值(W)加上偏權值(b),這個總和是 轉移函數(f)的自變數,輸出(a)則是轉移函數的應變數。值得注意的是, 神經元的權重值(W)和偏權值(b)都是可調整(Adjustable)的參數。跟生 物神經元相比,權重值和偏權值就像突觸的連接強度,細胞本體則對 應於加法器和轉移函數。其中,圖 3-6 列出了常用的轉移函數,以及 其圖示。 生物神經網路是由許許多多的人工神經元聯結所組成,因此,類 神經網路則是由許許多多的人工神經元聯結所組成的。所以類神經網 路是要對生物神經網路作出最簡單的模擬,而人工神經元則是最基本 的類神經網路單元,我們又可稱它為處理單元(Processing Element,PE) 或結點(Node)。3.2.3 類神經網路架構
我們可以引用 Robert Hecht-Nielson(1990)對類神經網路所下的定 義:“類神經網路是一種計算系統,由許多高度聯結的節點(或處理 單元)所組成,用來處理資訊並對外部的輸入以網路動態來回應。” 因此若把類神經網路視為黑盒子,則此黑盒子是由許許多多節點 所聯結成。其中,每一個節點都是獨立地進行運作,可視為一個單獨 的處理器,而且這些處理器都是以並行方式運行的。由圖 3-7 可知, 當我們將類神經網路視為一個透過輸入層的所有節點來輸入特定訊號的黑盒子時,類神經網路透過節點之間的相互聯接關係來作訊號的 處理,而且整個處理過程對我們而言是隱藏的,且將最終處理結果由 輸出層傳出。值得注意的是,在類神經網路中,訊號處理過程是以數 值方式來進行的,網路可以儲存訊號,而且所儲存的資訊是數值型態 的,因此,類神經網路可以用來作為多變數經驗建模的工具。
3.2.4 類神經網路如何運作
要了解類神經網路是如何運作,也就是網路是如何學習而具有功 能,就要從圖 3-7 來了解,在這個圖中,網路是如何來決定權重值(W) 和偏權值(b),而要回答這個問題就必頇了解網路內部是如何運作的。 基本上,類神經網路的運作分成兩個過程: 訓練過程─訓練目的在決定網路的權重值與偏權值。 模擬過程─目的在決定網路的預測輸出值或驗證網路的準確度。 類神經網路運作就是透過訓練,不斷地調整節點之間的權重值與 偏權值,使網路所計算的輸出為目標輸出,其運作目的就是要讓網路 能映射出正確的輸入─輸出關係模式。3.2.5 學習規則
在訓練過程中,網路遵循所謂的學習規則(Learning Rule)。同樣地, 各種類型的網路各有其不同的學習規則。 學習規則(Learning Rule)的定義如下:「用來修改網路權重值和偏21
權值的步驟,也可說是一種訓練演算法。」使用學習規則來訓練網路 執行一些特定的任務。一般將學習規則分成兩大類:監督式學習 (Supervised Learning)和無監督式學習(Unsupervised Learning)。
監督式學習─ 在監督式學習中,提供適當的網路行為訓練範例給學習規則,此 訓練範例如下: {p1,t1},{p2,t2},…, {pQ,tQ} 其中 pQ是網路的輸入,而 tQ是相對應正確的輸出(或稱目標),當輸 入給網路時,網路的輸出就會與目標做比較。接著,學習規則被用來 調整網路的權重值和偏權值,目的是為了讓網路的輸出更接近於目 標。 無監督式學習─ 在無監督式學習中,權重值和偏權值的修改只回應出網路的輸入, 沒有目標輸出可以獲得。此種演算法大部分會執行聚類(Cluster)運作。 這種演算法可將輸入圖樣分成有限個數的種類。在向量量化中使用此 種學習非常有用。
3.3 倒傳遞網路
倒傳遞網路是目前類神經網路學習模式中最具代表性,應用實務 最普遍的模式,也是本論文中將要採用的網路類型。在前面提到,在 訓練過程中,網路遵循所謂的學習規則來修改權重值與偏權值。所以,學習規則也可說是一種訓練演算法。
在 1958 年 Rosenblatt 提出的感知機學習規則和 Widrow 和 Hoff 的最小均方誤差演算法(Least Mean Square algorithm, LMS )都是設計 用來訓練單層的類似感知機的網路。這些單層網路路的缺點是只能解 線性可分的分類問題。Rosenblatt 和 Widrow 均意識到這些限制並且 都提出了克服此類問題的方法:多層網路。但他們未將這類演算法推 廣到用來訓練功能更強的網路。直到 1986 年,倒傳遞演算法(Back Propagation algorithm, BP)被提出,才使得多層感知機的網路架構得以 實現。 簡單來說,倒傳遞網路就是用倒傳遞演算法訓練多層感知機的神 經網路。若以學習規則來分的話,倒傳遞網路是屬於監督式學習網 路。
3.3.1 倒傳遞網路架構
多層網路擴展了單層感知機網路,功能更加強大。單層網路只能 區分線性可分的樣本,但多層網路能用於任意的分類問題。此外,多 層網路可用作通用型的函數近似器。研究表示,一個兩層網路只要在 其隱藏層中有足夠的神經元,且隱藏層神經元的轉移函數是 S 型類型 的,便可以近似任何實際的函數。 多層前饋網路也是最常見到採用倒傳遞演算法的網路架構,如圖 3-8。以下將簡要列出各層的功能: 輸入層─從外面接受訊號並將此訊號傳入類神經網路中,以方便進行23 訊號處理。 隱藏層─接受輸入層的訊號,對訊號進行處理,然而整個訊號處理過 程對網路使用者來說是看不見的。 輸出層─接受網路處理後的訊號,並將結果傳送到外面。 而多層前饋網路的內定性能函數是均方誤差(Mean Squared Error,MSE),就是在網路輸出和目標輸出之間平方誤差的平均。
3.3.2 倒傳遞演算法
倒傳遞演算法,它可用來訓練多層網路。根據 LMS 學習法則, 倒傳遞演算法也是最陡坡降演算法(Steepest Descent)的近似,其中性 能指標是均方誤差。LMS 演算法和倒傳遞演算法的區別在於它們對 導數的計算方式上。對單層的線性網路,誤差是網路權重值的顯現性 函數,其相對於權重值的導數較為容易求得。在具有非線性轉移函數 的多層網路中,網路權重值和誤差的關係更為複雜。為了計算導數, 需要使用微積分的鏈鎖法則。 而倒傳遞演算法的訓練過程,一般包含了三個階段。第一階段稱 之為資料向前匯入(data feedforward)前向運算主要是利用連結各層之 權重值來計算每個神經元的輸出值及誤差函數。輸出層中第 i 個節點 的計算輸出 yi定義如下: (3-31) 其中 Wij為隱藏層及輸出層節點之間的連接權值;Vij為輸入層及隱藏層節點之間的連接權值;θwi與 θvj為轉換函數 g 之門檻值;Xk為 輸入層第 k 個節點的輸入值。而 Ni、Nh及 N0則分別為輸入層、隱藏 層及輸出層的節點數目。而 g 為轉換函數,轉換函數之採用可取線性 或非線性。 第二階段為反向運算稱之為誤差向後推導(error back-propagation)。 在訓練的過程中,以一系統誤差函數來監測網路的學習表現。而此函 數通常定義如下: (3-32) 其中 P 為學習的案例數。 ; , 為 輸出節點 i 之期望值,而 (3-33) 訓練的最後階段為權值的修正。標準倒傳遞演算法係基於最陡梯 度法並使用固定的搜尋步幅(step length)或學習速率(learning ratio)來 訓練網路。其權值的修正如下: (3-34) (3-35) 其中 η 為學習率,一般介於 0~1 之間。上標(k)表示疊代第 k 次, 亦即網路經過 k 次的學習。
25
3.3.3 倒傳遞演算法種類
倒傳遞的一個主要問題是它需要較長的訓練時間。使用基本倒傳 遞演算法求解實際問題是不可行的,因為它需要用幾周的時間來訓練 網路,甚至要用大型電腦。由於倒傳遞演算法首先得以流行,已經有 了許多研究加速演算法收斂的工作。目前已有多種高效率的演算法, 其中使用標準的數值最佳化技巧有共軛梯度法、擬牛頓法、 Levenberg-Marquardt,而共軛梯度法又可再分 Fletcher-Reeves 更新法、 Polak-Ribiere 更新法、Power-Beale Restarts 更新法、比例共軛梯度演 算法。擬牛頓法包含 BFGS 演算法、One Step Secant 演算法。Levenberg-Marquardt 則就是 Levenberg-Marquardt 演算法。 要知道哪一種訓練演算法求解問題最快是困難的,這個任務受到 許多因素的影響,這當中包括了問題的複雜度、訓練用數據點的多寡、 網路中權重值和偏權值的數量、誤差目標值的大小和此網路是要應用 於圖樣辨識或是要用於函數被逼近。 一般而言,在函數逼近問題上,針對包含幾百個權重值的網路, Levenberg-Marquardt 演算法將有最快的收斂。如果要求很準確的訓練, 這個優勢特別值得注意。在許多案例中,此演算法比起任何其它演算 法要能夠獲得較低的均方誤差。然而,隨著網路中權重值的增加, Levenberg-Marquardt 演算法的優勢就降低了。因此,在本篇論文中, 我們決定採用比例共軛梯度演算法,因為此訓練演算法在不同類型問 題上似乎都執行的很好,尤其是具有大量權重值的網路,而且在函數 逼近問題上幾乎和 Levenberg-Marquardt 演算法一樣快,對於大型網 路則更快。
第四章 系統架構與結果
此章將說明本論文之研究步驟,以及所得到的結果。首先本論文 先決定類神經網路的網路架構及相關參數,再分析各神經網路的輸入 參數與輸出參數。接著,依初步耐震橋梁延伸樁桿件設計流程,來產 生類神經網路所需之案例,並將其分為訓練案例與測詴案例,最後, 將其結果彙整與討論。4.1 類神經網路設計
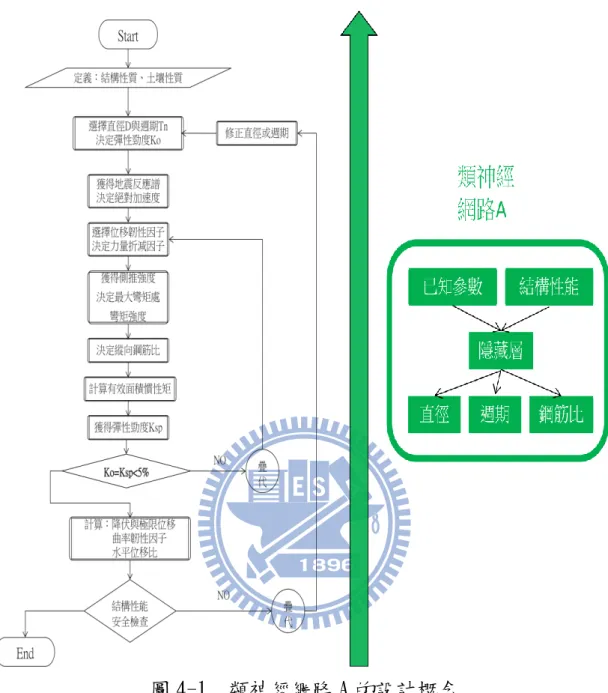
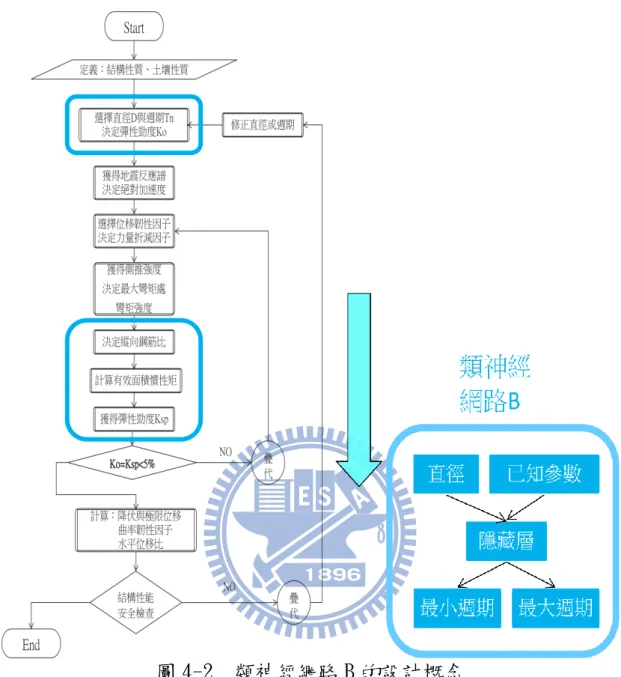
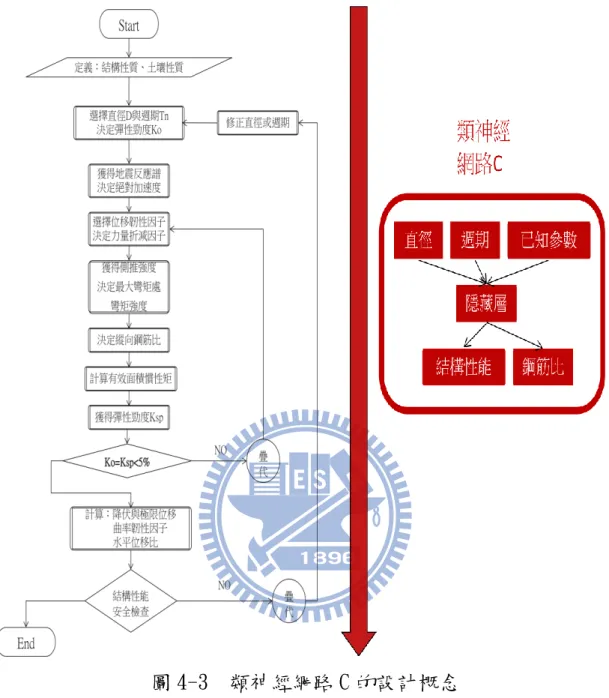
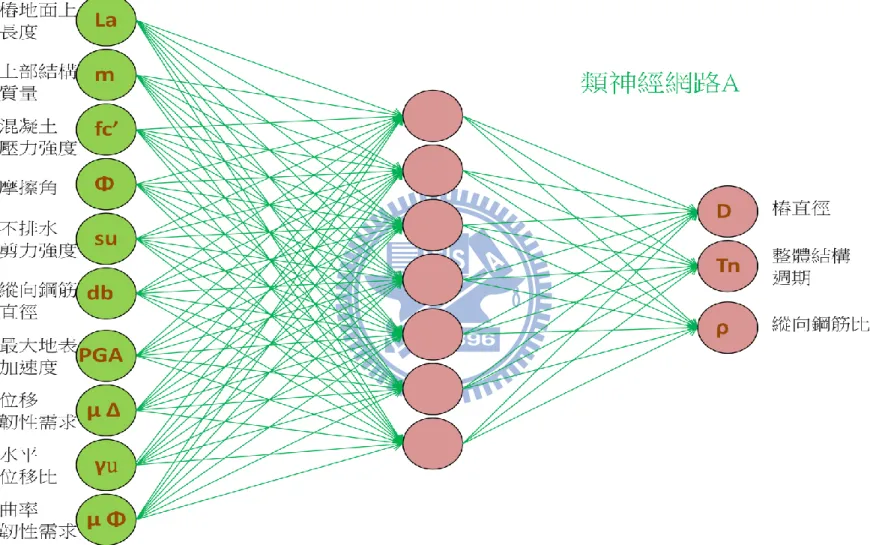
由此耐震橋梁延伸樁桿件設計中(如圖2-2),我們可以了解到此設 計流程,必頇由一開始的選擇樁桿件直徑(D)和系統彈性週期(Tn),再 經過整個設計流程後,才能得到結構耐震性能的目標值,也才能檢查 結構耐震性能有無滿足相關規範之規定。因此,假若有某一項結構耐 震性能未能滿足規定,則就必頇重新修正樁桿件直徑(D)和系統彈性 週期(Tn),也才可繼續進行設計流程,但是該如何修正其參數來使結 構耐震性能滿足相關規範之規定,則是一大難題。目前工程師們只能 藉由經驗累積與不斷地嘗詴來達到預期的設計目標。為了解決此問題, 我們希望能利用類神經網路的優點,建立一個與設計流程概念反向的 網路架構,就是將結構耐震性能中的位移韌性需求(μΔ)、水平位移比 (γu)、曲率韌性需求(μΦ)、已知結構性質和土壤性質當作輸入,而樁桿 件直徑(D)、系統彈性週期(Tn)與縱向鋼筋比(ρ)當作輸出,如圖4-1。 如此一來,工程師們即可藉由結構耐震性能需求得到相對應的初始設 計參數。 雖然類神經網路能幫助我們解決問題,也能達到一定的可靠性與 精準度,但是仍有誤差產生的機會,為了避免此情形,我們建構了其27 它類神經網路來作輔助設計後的檢驗與評估。在此橋梁耐震性能設計 流程中,發現系統彈性週期(Tn)根據設計的結構物幾何性質(如m,La, D,土壤狀況)與實務上鋼筋比的上下限值,而有最小系統彈性週期 (Tmin)與最大系統彈性週期(Tmax)之限制,而若一開始選擇系統彈性週 期(Tn)時,沒有介於此限制之間時,則很容易在巢狀迴圈的內層中產 生問題,所以根據了最小系統彈性週期(Tmin)與最大系統彈性週期(Tmax) 之限制,建構出第二個類神經網路,用來檢查系統彈性週期(Tn)是否 滿足其限制條件,如圖4-2。 最後再建構第三個類神經網路,如圖 4-3,與此橋梁耐震性能設 計方法的設計流程概念相同,由已知的結構、土壤性能、樁桿件直徑 (D)和系統彈性週期(Tn)當作輸入,而結構耐震性能中的位移韌性需求 (μΔ)、水平位移比(γu)、曲率韌性需求(μΦ)與縱向鋼筋比(ρ)當作輸出。 藉此類神經網路來評估,樁桿件直徑(D)和系統彈性週期(Tn)其相對應 的結構耐震性能。 經由類神經網路 A 輔助設計系統,依據結構耐震性能需求得到相 對應的初始設計參數,如樁桿件直徑(D)、系統彈性週期(Tn)和縱向鋼 筋比(ρ),再藉由類神經網路 B 和類神經網路 C,做輔助設計後的檢 驗與評估。將由類神經網路 A 得到的輸出結果,如樁桿件直徑(D)和 系統彈性週期(Tn),依照網路 B 與網路 C 所需的輸入參數分別置入, 進而得出輸出目標值,用以檢驗系統彈性週期(Tn)是否滿足最小系統 彈性週期(Tmin)與最大系統彈性週期(Tmax)之限制,且評估此結構耐震 性能是否為一開始預期的設計目標值。而圖 4-4,為三個類神經網路 之間的簡略關係圖。
4.2 類神經網路的設計參數
首先根據此橋梁性能設計流程,如圖 2-2,找出哪些參數是重要 的影響因子。在設計流程中,初始設計參數對整個設計流程影響非常 關鍵,如下: a.結構性質:樁桿件在地面上的高度(La)、上部結構的質量(m) 、 混凝土楊氏模數(E) 、混凝土壓力強度(fc’) 、縱向 鋼筋降伏強度 (fy) 、縱向鋼筋直徑(db)。 b.土壤性質:主要分為兩類。 (Ⅰ)黏性土壤─不排水剪力強度(su),水平反力模數kh估計 為kh=67su [10] (Ⅱ)非黏性土壤─有效摩擦角(Φ),水平反力模數nh可以 使用有效摩擦角(Φ)來估算 [11] 其中縱向鋼筋降伏強度,如表4-1,可以看到鋼筋尺寸#5以下,降 伏 強 度 皆 為 2800(kg/cm2 ) , 鋼 筋 尺 寸 #6 以 上 , 降 伏 強 度 皆 為 4200(kg/cm2),而一般在設計中,通常採用的鋼筋尺寸都是#6以上, 其降伏強度皆為4200(kg/cm2 ),對設計結果造成的影響都一樣,故縱 向鋼筋降伏強度不考慮為類神經網路的設計參數。接著,混凝土壓力 強度(fc’)和混凝土楊氏模數(E)有直接關係,故只採用混凝土壓力強度 來當作類神經網路的設計參數之一。同樣地,在土壤性質中,我們知 道水平反力模數kh與水平反力模數nh皆可以分別使用不排水剪力強度 (su)與有效摩擦角(Φ)來估算,故只採用不排水剪力強度和有效摩擦角 來當作類神經網路的設計參數。 在一開始選擇的樁桿件直徑(D)和系統彈性週期(Tn)也是相當重要29 因數,直徑影響了整個設計流程中其它相當多的因子,系統彈性週期 更是用來決定地震反應譜中的相關因數,而在設計流程中內層迴圈的 疊代條件,依據的即是由系統彈性週期推導出的系統彈性勁度。兩者 皆選為類神經網路的設計參數。在步驟二中的已知參數,該地區的最 大地表加速度(pga)也是重要因數,同樣選為類神經網路的設計參 數。 而最後整個設計流程是否完成,決定在結構耐震性能有無滿足相 關規範之規定。在此設計流程中,結構耐震性能的安全檢查,主要是 在檢查位移韌性需求(μΔ)、縱向鋼筋比(ρ)、水平位移比(γu)和曲率韌性 需求(μΦ)。因此,可以了解到這四個結構性能參數是如此重要,因此, 皆採用為類神經網路的設計參數。 至此,我們已決定出類神經網路的設計參數。如下: 樁桿件在地面上的長度 (La)、上部結構的質量 (m) 、混凝土壓力強 度 (fc’) 、縱向鋼筋直徑 (db) 、不排水剪力強度 (su) 、有效摩擦角 (Φ) 、樁桿件直徑 (D) 、系統彈性週期 (Tn) 、最大地表加速度 (pga)、 位移韌性需求 (μΔ)、縱向鋼筋比 (ρ)、水平位移比 (γu)、曲率韌性需 求 (μΦ)。總共 13 個。 而圖 4-5、圖 4-6、圖 4-7 分別指出類神經網路 A、B、C 的輸入 參數與輸出參數。
4.3 設計參數的界限
先決定出 13 個設計參數的上下界限值。首先,要遵孚設計流程中的限制條件,如下: 2≦ D La ≦8,0.05≦ Ag fc' mg ≦ 0.15,Ag= 4 πD2 接著,以下為本研究採用參數的範圍,如: 混凝土壓力強度 (fc’) ,取 27.61Mpa~55.23Mpa 之間 縱向鋼筋直徑 (db),如表 4-1,取鋼筋尺寸#10 以上 不排水剪力強度 (su)取 30(kN/m 2 )~180(kN/m2) 有效摩擦角 (Φ)取 29°~42° 系統彈性週期 (Tn)取合理範圍 0.5 秒~2 秒 最大地表加速度 (pga)取 0.3g~0.7g 接著,按照上述參數的範圍,利用 Matlab 依不同設計參數來進行 橋梁延伸樁桿件設計流程,而得到相對應的結構耐震性能目標:位移 韌性需求 (μΔ)、縱向鋼筋比 (ρ)、水平位移比 (γu)和曲率韌性需求 (μΦ)。再將介於安全範圍的結構耐震性能挑選出來。安全範圍如下: 位移韌性需求─1≦μΔ≦3 縱向鋼筋比─ 0.75%≦ρ≦4% 水平位移比─γu≦8% 最後,對所有產生的案例做分類,分為訓練案例與測詴案例,再 將訓練案例由多至少分成三至五組,如表 4-2。
4.4 倒傳遞網路架構
目前外部問題並沒有直接指明隱藏層需要的神經元數目,實際上,31 精準預測隱藏層所需要的神經元數目至今仍然存在一些在理論上還 沒有解決的問題。至於網路中的神經元層數,大多數實際的神經網路 僅僅只有 2 到 3 層,很少有 4 層或更多層。因此,本研究中的倒傳遞 網路架構,皆使用單層隱藏層。 類神經網路 A 隱藏層跟輸出層的轉移函數皆採用正切雙彎曲轉 移函數,如圖 4-8。經由測詴後找到神經元數目為 19 個較合適,測詴 結果如圖 4-9。 類神經網路 B 隱藏層的轉移函數採用正切雙彎曲轉移函數,而輸 出層的轉移函數採用線性轉移函數,如圖 4-10。經由測詴後找到神經 元數目為 16 個較合適,測詴結果如圖 4-11。 類神經網路 C 隱藏層跟輸出層的轉移函數皆採用正切雙彎曲轉移 函數,如圖 4-12。經由測詴後找到神經元數目為 19 個較合適,測詴 結果如圖 4-13。 最後,列出採用的網路架構型式。類神經網路 A 為 10-19-3 之網 路架構,類神經網路 B 為 6-16-2 之網路架構,類神經網路 C 為 9-19-4 之網路架構,整理如表 4-3。
4.5 訓練與測詴結果
以下分別對類神經網路 A、類神經網路 B、類神經網路 C 做訓練 與測詴。4.5.1 類神經網路 A
分別採用五組不同數目之訓練案例來對類神經網路 A 作訓練,再 使用測詴案例來作分析(如表 4-2)。訓練結果與測詴結果如下: a.訓練案例數目為 5061 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 3364 次時 達到收斂,如圖 4-14。訓練 R 值結果為 0.98436,如圖 4-15。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。樁桿件直徑(D)的平均相對 誤差為 3.65%,最大相對誤差為 24.69%,判定係數(R2 )為 0.9549。系 統彈性週期(Tn)的平均相對誤差為 4.45%,最大相對誤差為 19.84%, 判定係數(R2)為 0.8868。縱向鋼筋比(ρ) 的平均相對誤差為 11.98%, 最大相對誤差為 199%,判定係數(R2 )為 0.8426。如圖 4-16、圖 4-17。 b.訓練案例數目為 9207 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 2567 次時 達到收斂,如圖 4-18。訓練 R 值結果為 0.97924,如圖 4-19。 類神經網路之測詴結果:33 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。樁桿件直徑(D)的平均相對 誤差為 3.37%,最大相對誤差為 23.96%,判定係數(R2 )為 0.9597。系 統彈性週期(Tn)的平均相對誤差為 3.58%,最大相對誤差為 30.64%, 判定係數(R2 )為 0.9303。縱向鋼筋比(ρ) 的平均相對誤差為 10.6%,最 大相對誤差為 90.16%,判定係數(R2 )為 0.8924。如圖 4-20、圖 4-21。 c.訓練案例數目為 18812 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 3233 次時 達到收斂,如圖 4-22。訓練 R 值結果為 0.97969,如圖 4-23。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。樁桿件直徑(D)的平均相對 誤差為 3.01%,最大相對誤差為 26.00%,判定係數(R2 )為 0.9655。系 統彈性週期(Tn)的平均相對誤差為 3.42%,最大相對誤差為 19.01%, 判定係數(R2 )為 0.9347。縱向鋼筋比(ρ) 的平均相對誤差為 10.97%, 最大相對誤差為 58.3%,判定係數(R2 )為 0.8765。如圖 4-24、圖 4-25。 d.訓練案例數目為 31351 組 類神經網路之訓練結果:
採用比例共軛梯度演算法來訓練網路。在訓練次數為 5165 次時 達到收斂,如圖 4-26。訓練 R 值結果為 0.98533,如圖 4-27。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。樁桿件直徑(D)的平均相對 誤差為 3.59%,最大相對誤差為 25.68%,判定係數(R2 )為 0.9601。系 統彈性週期(Tn)的平均相對誤差為 2.97%,最大相對誤差為 17.07%, 判定係數(R2 )為 0.9511。縱向鋼筋比(ρ) 的平均相對誤差為 9.37%,最 大相對誤差為 54.34%,判定係數(R2 )為 0.9049。如圖 4-28、圖 4-29。 e.訓練案例數目為 62866 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 15887 次時 達到收斂,如圖 4-30。訓練 R 值結果為 0.98502,如圖 4-31。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。樁桿件直徑(D)的平均相對 誤差為 2.82%,最大相對誤差為 23.26%,判定係數(R2 )為 0.9764。系 統彈性週期(Tn)的平均相對誤差為 2.98%,最大相對誤差為 20.26%, 判定係數(R2 )為 0.9465。縱向鋼筋比(ρ) 的平均相對誤差為 8.35%,最 大相對誤差為 48.04%,判定係數(R2 )為 0.9321。如圖 4-32、圖 4-33。
35 f.不同訓練案例數目比較與討論 將五組不同訓練案例數目對類神經網路作訓練而得到的測詴結 果,分別對平均相對誤差、最大相對誤差、判定係數(R2 )作比較,如 圖 4-34、圖 4-35、圖 4-36。由圖中可以發現隨著訓練案例數目的增 加,測詴結果也越來越好,其中樁桿件直徑(D)與系統彈性週期(Tn) 的平均相對誤差雖然逐漸下降,但幅度較小,而最大相對誤差則是明 顯下降許多,至於縱向鋼筋比(ρ)不論是平均相對誤差、最大相對誤差 或判定係數(R2 )皆有的顯著的變佳趨勢。 其中挑選測詴結果最佳,訓練案例數目為 62866 組的情況來做討 論,一般設計情況下,樁桿件直徑(D)範圍通常差不多介於 1~3(m), 故平均相對誤差小於 5%已算是相當準確的結果,最大相對誤差若達 20%也算可以接受的範圍。至於系統彈性週期(Tn)的範圍通常位於 1.5~2(s)之間,因此,平均相對誤差小於 5%算是相當準確的結果,最 大相對誤差 20.26%也是可以接受的範圍。而 ACI318-02 規範規定縱 向鋼筋比(ρ)需介於 0.75%~4%之間,故平均相對誤差小於 10%算是很 好的結果,而最大相對誤差卻達 48.04%則不算滿意的結果,但由測 詴結果(圖 4-32)中可以發現,只有少數測詴案例有此反應,故以最後 三個網路計算輸出結果來說,判定係數(R2 )皆達 0.9 以上,顯示類神 經網路 A 具有一定的可靠性與精確度。
4.5.2 類神經網路 B
分別採用三組不同數目之訓練案例來對類神經網路 B 作訓練,再 使用測詴案例來作分析(如表 4-2)。訓練結果與測詴結果如下:a.訓練案例數目為 1130 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 540 次時達 到收斂,如圖 4-37。訓練 R 值結果為 0.99935,如圖 4-38。 類神經網路之測詴結果: 測詴案例數目為 640 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。最小系統彈性週期(Tmin)的 平均相對誤差為 11.64%,最大相對誤差為 101.2%,判定係數(R2 )為 0.8799。最大系統彈性週期(Tmax)的平均相對誤差為 9.7%,最大相對 誤差為 117.04%,判定係數(R2 )為 0.9011。如圖 4-39、圖 4-40。 b.訓練案例數目為 4678 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 1120 次時 達到收斂,如圖 4-41。訓練 R 值結果為 0.99972,如圖 4-42。 類神經網路之測詴結果: 測詴案例數目為 640 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。最小系統彈性週期(Tmin)的 平均相對誤差為 1.64%,最大相對誤差為 16.69%,判定係數(R2 )為 0.9891。最大系統彈性週期(Tmax)的平均相對誤差為 1.6%,最大相對 誤差為 15.26%,判定係數(R2 )為 0.9907。如圖 4-43、圖 4-44。
37 c.訓練案例數目為 11509 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 2119 次時 達到收斂,如圖 4-45。訓練 R 值結果為 0.99973,如圖 4-46。 類神經網路之測詴結果: 測詴案例數目為 640 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。最小系統彈性週期(Tmin)的 平均相對誤差為 1%,最大相對誤差為 7.35%,判定係數(R2 )為 0.9976。 最大系統彈性週期(Tmax)的平均相對誤差為 0.94%,最大相對誤差為 5.97%,判定係數(R2)為 0.9982。如圖 4-47、圖 4-48。 d.不同訓練案例數目比較與討論 將三組不同訓練案例數目對類神經網路作訓練而得到的測詴結 果,分別對平均相對誤差、最大相對誤差、判定係數(R2 )作比較,如 圖 4-49、圖 4-50、圖 4-51。由圖中可以發現隨著訓練案例數目的增 加,不論是平均相對誤差、最大相對誤差或判定係數(R2 )的測詴結果 都明顯變佳的趨勢。 類神經網路 B 是用來檢驗系統彈性週期(Tn)是否介於最小系統彈 性週期(Tmin)與最大系統彈性週期(Tmax)此限制之間,而訓練案例數目 為 1130 組時,最小系統彈性週期(Tmin)與最大系統彈性週期(Tmax)的最 大相對誤差皆超過 100%,此測詴結果顯示此時的類神經網路 B 檢驗
效果沒有太大用處,但是隨著訓練案例數目的增加,相對誤差皆大幅 下降(如圖 4-39、圖 4-43、圖 4-47),其中訓練案例數目為 11509 組時, 最大相對誤差已小於 10%,平均相對誤差更是小於 1%,判定係數(R2 ) 也都高達 0.99 以上,而最小系統彈性週期(Tmin)與最大系統彈性週期 (Tmax)的範圍通常為 1~4(s),以此測詴結果而言,類神經網路 B 的精 確度是相當高的。
4.5.3 類神經網路 C
分別採用五組不同數目之訓練案例來對類神經網路 C 作訓練,再 使用測詴案例來作分析(如表 4-2)。訓練結果與測詴結果如下: a.訓練案例數目為 5061 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 2285 次時 達到收斂,如圖 4-52。訓練 R 值結果為 0.9883,如圖 4-53。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。位移韌性需求(μΔ)的平均相 對誤差為 12.29%,最大相對誤差為 141.83%,判定係數(R2 )為 0.5172。 縱向鋼筋比(ρ)的平均相對誤差為 9.26%,最大相對誤差為 104.47%, 判定係數(R2 )為 0.9115。水平位移比(γu)的平均相對誤差為 10.85%, 最大相對誤差為 104.2%,判定係數(R2 )為 0.5189。曲率韌性需求(μΦ) 的平均相對誤差為 27.56%,最大相對誤差為 562.41%,判定係數(R2)39 為 0.381。如圖 4-54、圖 4-55。 b.訓練案例數目為 9207 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 2981 次時 達到收斂,如圖 4-56。訓練 R 值結果為 0.98875,如圖 4-57。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。位移韌性需求(μΔ)的平均相 對誤差為 4.66%,最大相對誤差為 40.95%,判定係數(R2 )為 0.9349。 縱向鋼筋比(ρ)的平均相對誤差為 6.74%,最大相對誤差為 41.46%, 判定係數(R2 )為 0.9587。水平位移比(γu)的平均相對誤差為 4.16%,最 大相對誤差為 35.23%,判定係數(R2 )為 0.9603。曲率韌性需求(μΦ)的 平均相對誤差為 10.47%,最大相對誤差為 93.61%,判定係數(R2 )為 0.9119。如圖 4-58、圖 4-59。 c.訓練案例數目為 18812 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 6133 次時 達到收斂,如圖 4-60。訓練 R 值結果為 0.98915,如圖 4-61。 類神經網路之測詴結果:
測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。位移韌性需求(μΔ)的平均相 對誤差為 4.51%,最大相對誤差為 44.2%,判定係數(R2 )為 0.9333。 縱向鋼筋比(ρ)的平均相對誤差為 5.69%,最大相對誤差為 55.99%, 判定係數(R2 )為 0.9732。水平位移比(γu)的平均相對誤差為 3.88%,最 大相對誤差為 34.03%,判定係數(R2 )為 0.961。曲率韌性需求(μΦ)的平 均相對誤差為 9.64%,最大相對誤差為 81.51%,判定係數(R2 )為 0.9241。 如圖 4-62、圖 4-63。 d.訓練案例數目為 31351 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 6372 次時 達到收斂,如圖 4-64。訓練 R 值結果為 0.98899,如圖 4-65。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。位移韌性需求(μΔ)的平均相 對誤差為 4.32%,最大相對誤差為 42.9%,判定係數(R2 )為 0.9478。 縱向鋼筋比(ρ)的平均相對誤差為 5.68%,最大相對誤差為 28.56%, 判定係數(R2 )為 0.9718。水平位移比(γu)的平均相對誤差為 4.06%,最 大相對誤差為 29.66%,判定係數(R2 )為 0.9631。曲率韌性需求(μΦ)的 平均相對誤差為 9.74%,最大相對誤差為 98.11%,判定係數(R2 )為 0.93。 如圖 4-66、圖 4-67。
41 e.訓練案例數目為 62866 組 類神經網路之訓練結果: 採用比例共軛梯度演算法來訓練網路。在訓練次數為 5222 次時 達到收斂,如圖 4-68。訓練 R 值結果為 0.98899,如圖 4-69。 類神經網路之測詴結果: 測詴案例數目為 900 組,分別比較期望值與網路輸出的平均相對 誤差、最大相對誤差,還有判定係數(R2 )。位移韌性需求(μΔ)的平均相 對誤差為 4.25%,最大相對誤差為 22.91%,判定係數(R2 )為 0.9513。 縱向鋼筋比(ρ)的平均相對誤差為 5.49%,最大相對誤差為 30.95%, 判定係數(R2 )為 0.9744。水平位移比(γu)的平均相對誤差為 4.13%,最 大相對誤差為 27.39%,判定係數(R2 )為 0.9654。曲率韌性需求(μΦ)的 平均相對誤差為 9.49%,最大相對誤差為 73.29%,判定係數(R2 )為 0.9431。如圖 4-70、圖 4-71。 f.不同訓練案例數目比較與討論 將五組不同訓練案例數目對類神經網路作訓練而得到的測詴結 果,分別對平均相對誤差、最大相對誤差、判定係數(R2 )作比較,如 圖 4-72、圖 4-73、圖 4-74。由圖中可以發現訓練案例數目超過 9207 組後,測詴結果的變佳幅度都很小。 其中挑選測詴結果最佳,訓練案例數目為 62866 組的情況來做討 論,ATC-32[11]規範規定位移韌性需求(μΔ)需介於 1~3,故平均相對

![圖 2-1 將樁桿件的反應分成三種界線(採用 Song [7]之圖)](https://thumb-ap.123doks.com/thumbv2/9libinfo/8759253.207795/68.892.138.762.122.399/圖21將樁桿件的反應分成三種界線採用Song7之圖.webp)
![圖 2-2 橋梁延伸樁桿件設計流程圖(採用 Song 等人 [5]之圖)](https://thumb-ap.123doks.com/thumbv2/9libinfo/8759253.207795/69.892.139.763.108.1000/圖22橋梁延伸樁桿件設計流程圖採用Song等人5之圖.webp)
![圖 3-2 pga/pgv 與(pga×pgd)/pgv 2 比值 (採用 PEER 數據,引用[5])](https://thumb-ap.123doks.com/thumbv2/9libinfo/8759253.207795/71.892.136.762.104.1011/圖32pgapgv與pga×pgdpgv2比值採用PEER數據引用5.webp)