利用近紅外光影像之近景攝影測量建立數值表面模型之研究 - 政大學術集成
119
0
0
全文
(2) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v.
(3)
(4) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v.
(5) 謝誌 「要怎麼收獲,先那麼栽」,在政大地政學系大學部儲備四年能量,並於碩 士班其間再接再厲耕耘兩年之後,終於獲得豐碩的果實,在即將踏向人生中另一 個階段之際,我要好好地感謝一直以來相助的貴人們。 感謝我的指導教授—黃灝雄老師,即便我剛進入研究所時,表現並不出色, 也缺乏與您之間的「默契」,但您還是非常包容我,時常提點及關心我的修課狀 況與研究進度,從您身上我看到學者的風範和做學問的態度,以及一生受用的待 人處事原則。也謝謝您的信任及肯定,我才能準時地完成學業。. 政 治 大 感謝詹進發、林老生、邱式鴻與林士淵老師,使我對專業領域的認知更上層 立. ‧ 國. 學. 樓,並對研究工具的使用上更為熟悉,同時也給予啟發,讓我的思考邏輯與研究 架構更為成熟。感謝口試委員黃金聰及林士淵老師,對我論文的細心指教與建議,. ‧. 使我獲益良多。. y. Nat. io. sit. 感謝好友宇倢、姵諠,和你們相見暢談,分享喜悅,總能讓我忘掉煩惱。感. n. al. er. 謝好哥兒們閔隆,你在 ACRS 所提出的問題,對於我構思研究上有很大的助益,. Ch. i Un. v. 也謝謝你時常北上聚餐。感謝六年同窗的梁平、思睿、勇恩、承一以及冠雄,在. engchi. 研究的路上有你們相伴,著實充滿歡笑。感謝 RS 與 GIS 研究室的各位:安勤、 豐毓學姊、彥廷學長、家翎、繁恩、翊甯、汝晏和舜閔,在撰寫論文其間不時鼓 勵及關心我;也特別感謝敏瑜和怡君,替我在實驗區爬高爬低的佈設黑白覘標, 令我備感溫馨。 感謝我的家人們,爸爸、媽媽一路支持我,使我沒有後顧之憂,能專心致志, 奮勇向前;外婆、阿姨與姨丈們、舅舅和舅媽們與表弟們,時常的關心及照顧, 讓求學在外的我有回到家的感覺;弟弟讓我笑口常開,排憂解慮。最後再次謝謝 所有幫助過我的貴人,有您們真好。 振廷謹誌於依山傍水的好環境—國立政治大學 民國一百零一年八月.
(6) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v.
(7) 摘要 點雲(point cloud)為以大量三維坐標描述地表實際情形的資料形式, 其中包含其三維坐標及相關屬性。通常點雲資料取得方式為光達測量,其 以單一波段雷射光束掃描獲取資料,以光達獲取點雲,常面臨掃描時間差、 缺乏多波段資訊、可靠邊緣線及角點資訊、大量離散點雲又缺乏語意資訊 (semantic information)難以直接判讀及缺乏多餘觀測量等問題。 攝影測量藉由感測反射自太陽光或地物本身放射之能量,可記錄為二. 政 治 大. 維多光譜影像,透過地物在不同光譜範圍表現之特性,可輔助分類,改善. 立. 分類成果。若匹配多張高重疊率的多波段影像,可以獲取包含多波段資訊. ‧ 國. 學. 且位於明顯特徵點上的點雲,提供光達以外的點雲資料來源。. ‧. 傳統空中三角測量平差解算地物點坐標及產製數值表面模型(Digital. sit. y. Nat. Surface Model, DSM)時,多採用可見光影像為主;而目前常見之高空間解. io. er. 析度數值航照影像,除了記錄可見光波段之外,亦可蒐集近紅外光波段影 像。但較少採用近紅外光波段影像,以求解地物點坐標及建立 DSM。. n. al. Ch. engchi. i Un. v. 因此本研究利用多波段影像所蘊含的豐富光譜資訊,以取像方式簡易 及低限制條件的近景攝影測量方式,匹配多張可見光、近紅外光及紅外彩 色影像,分別建立可見光、近紅外光及紅外彩色之 DSM,其目的在於探討 加入近紅外光波段後,所產生的近紅外光及紅外彩色 DSM,和可見光 DSM 之異同;並比較該 DSM 是否更能突顯植被區。 研究顯示,以可見光點雲為檢核資料,計算近紅外光與紅外彩色點雲 的均方根誤差為其距離門檻值之相對檢核方法,可獲得約 21%的點雲增加 率;然而使用近紅外光或紅外彩色影像,即使能增加點雲資料量,但對於. I.
(8) 增加可見光影像未能匹配的資料方面,其效果仍屬有限。 關鍵詞:近紅外光影像、近景攝影測量、點雲、數值表面模型。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. II. i Un. v.
(9) Abstract Point cloud represents the surface as mass 3D coordinates and attributes. Generally, these data are usually collected by LIDAR (LIght Detection And Ranging), which acquires data through single band laser scanning. But the data collected by LIDAR could face problems, such as scanning process is not instantaneous, lack of multispectral information, breaklines, corners, semantic information and redundancies.. 政 治 大. However, photogrammetry record the electromagnetic energy reflected or. 立. emitted from the surface as 2D multispectral images, via ground features with. ‧ 國. 學. different characteristics differ in spectrum, it can be classified more efficiently and precisely. By matching multiple high overlapping multispectral images,. ‧. point cloud including multispectral information and locating on obvious feature. y. Nat. er. io. LIDAR.. sit. points can be acquired. This provides another point cloud source aparting from. n. al. In most studies,. iv n C visible (VIS) images are h elight ngchi U. used primarily, while. calculating ground point coordinates and generating digital surface models (DSM) through aerotriangulation. Although nowadays, high spatial resolution digital aerial images can acquire not only VIS channel, but also near infrared (NIR) channel as well. But there is lack of research doing the former procedures by using NIR images. Therefore, this research focuses on the rich spectral information in multispectral images, by using easy image collection and low restriction close range photogrammetry method. It matches several VIS, NIR and color infrared III.
(10) (CIR) images, and generate DSMs respectively. The purpose is to analyze the difference between VIS, NIR and CIR data sets, and whether it can emphasize the vegetation area, after adding NIR channel in DSM generation. The result shows that by using relative check points between NIR, CIR data with VIS one. First, VIS point cloud was set as check point data, then, the RMSE (Root Mean Square Error) of NIR and CIR point cloud was calculated as distance threshold. Its data increment is 21% ca. However, the point cloud data amount can be increased, by matching NIR and CIR images. But the effect of. 政 治 大. increasing data, which was not being matched from VIS images are limited.. 立. Keywords: Near Infrared Images, Close Range Photogrammetry, Point Cloud,. ‧ 國. 學. Digital Surface Model (DSM).. ‧. n. er. io. sit. y. Nat. al. Ch. engchi. IV. i Un. v.
(11) 目錄 摘要 ...................................................................................................................... I Abstract ............................................................................................................ III 目錄 ..................................................................................................................... V 圖目錄 .............................................................................................................. VII 表目錄 ............................................................................................................... IX 第一章 緒論 ........................................................................................................ 1 第一節 研究背景 ........................................................................................ 1 第二節 研究動機及目的 ............................................................................ 4 一、研究動機 ...................................................................................... 4 二、研究目的 ...................................................................................... 6 第三節 研究方法及流程 ............................................................................ 7. 立. 政 治 大. ‧ 國. 學. 一、研究方法 ...................................................................................... 7 二、研究流程 ...................................................................................... 8 第四節 論文架構 ........................................................................................ 9. ‧. 第二章 理論基礎及文獻回顧 .......................................................................... 11 第一節 點雲來源 ...................................................................................... 12 一、光達 ............................................................................................ 12 二、攝影測量 .................................................................................... 13 三、光達及攝影測量點雲之比較 .................................................... 16 第二節 多光譜影像 .................................................................................. 19 一、近紅外光波段 ............................................................................ 19 二、結合點雲和多光譜影像之研究 ................................................ 21 第三節 影像匹配 ...................................................................................... 23 一、標準化互相關法 ........................................................................ 24. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v. 二、最小自乘匹配法 ........................................................................ 26 第四節 數值表面模型 .............................................................................. 28 一、規則網格 .................................................................................... 29 二、不規則三角網 ............................................................................ 29 第五節 小結 .............................................................................................. 31 第三章 實驗設計 .............................................................................................. 33 第一節 實驗規劃 ...................................................................................... 33 一、實驗區 ........................................................................................ 33 二、相機率定 .................................................................................... 36 三、資料來源 .................................................................................... 39 V.
(12) 第二節 資料處理...................................................................................... 41 一、近紅外光影像............................................................................ 41 二、紅外彩色影像............................................................................ 43 第三節 成果檢核方法.............................................................................. 44 一、絕對精度檢核............................................................................ 44 二、相對精度檢核............................................................................ 45 第四章 研究成果及分析.................................................................................. 47 第一節 相機率定成果.............................................................................. 47 一、率定成果.................................................................................... 48 二、率定成果探討............................................................................ 50 第二節 點雲及 DSM 產製成果 ............................................................... 54 一、不同基線距離之像對................................................................ 55 二、可見光點雲及 DSM .................................................................. 58 三、近紅外光點雲及 DSM .............................................................. 62. 政 治 大 四、紅外彩色點雲及 DSM .............................................................. 65 立 五、小結............................................................................................ 68. ‧ 國. 學. 第三節 成果檢核及探討.......................................................................... 69 一、絕對檢核成果............................................................................ 71. ‧. 二、相對檢核成果............................................................................ 78 三、建立 DSM .................................................................................. 83 四、小結............................................................................................ 87. y. Nat. sit. n. al. er. io. 第五章 結論與建議.......................................................................................... 89 第一節 結論.............................................................................................. 89 第二節 建議.............................................................................................. 92. Ch. i Un. v. 參考文獻............................................................................................................ 95 一、中文參考文獻............................................................................ 95 二、外文參考文獻............................................................................ 96 三、網頁參考文獻............................................................................ 97. engchi. 附錄.................................................................................................................... 99. VI.
(13) 圖目錄 圖 1-1 圖 2-1. 研究流程圖 ............................................................................................ 8 空載光達整合 GPS 及 IMU 之示意圖(Vosselman and Maas, 2010). .................................................................................................................... 13 圖 2-2 共線條件式示意圖(Wolf and Dewitt, 2004) ................................. 14 圖 2-3 健康植物光譜反射曲線圖(Seager et al., 2005) ............................ 20 圖 2-4 標準化互相關法示意圖(Wolf and Dewitt, 2004) ......................... 25 圖 2-5 圖 2-6 圖 3-1 圖 3-2 圖 3-3. 最小自乘匹配次陣列位置示意圖(Wolf and Dewitt, 2004) ......... 27 以 TIN 準確呈現真實地表示意圖(McGlone et al., 2004) ........... 31 實驗區範圍圖 ...................................................................................... 34 控制點及檢核點分佈圖 ...................................................................... 35 Image Master 及 iWitnessPRO 率定模版圖 ....................................... 37. 圖 3-4 圖 3-5 圖 3-6 圖 3-7. 三維率定場佈設圖 .............................................................................. 38 測試 Canon EOS 5D 感測近紅外光能力圖 ....................................... 39 攝影位置設定圖 .................................................................................. 40 影像處理示意圖 .................................................................................. 43. 圖 3-8 圖 3-9 圖 4-1 圖 4-2 圖 4-3 圖 4-4 圖 4-5 圖 4-6 圖 4-7. 絕對精度檢核流程圖 .......................................................................... 44 相對精度檢核流程圖 .......................................................................... 46 率定成果 1 和 2 透鏡畸變差網格示意圖 .......................................... 51 率定成果 1 和 2 透鏡畸變差向量示意圖 .......................................... 52 輻射透鏡畸變差比較圖 ...................................................................... 53 重疊率 80%之 NCC、LSM 匹配可見光影像成果圖 ....................... 57 重疊率 80%之 NCC、LSM 匹配近紅外光影像成果圖 ................... 57 重疊率 80%之 NCC、LSM 匹配紅外彩色影像成果圖 ................... 58 地面控制點最大方向誤差位置圖 ...................................................... 59. 圖 4-8 圖 4-9 圖 4-10 圖 4-11 圖 4-12 圖 4-13 圖 4-14. 取樣距離 1 m 之 NCC、LSM 匹配可見光影像成果圖 ................... 60 取樣距離 0.5 m 之 NCC、LSM 匹配可見光影像成果圖 ................ 60 取樣距離 0.25 m 之 NCC、LSM 匹配可見光影像 DSM 成果圖.. 61 取樣距離 0.25 m 之 NCC、LSM 匹配可見光影像點雲成果圖 .... 61 取樣距離 1 m 之 NCC、LSM 匹配近紅外光影像成果圖 ............. 63 取樣距離 0.5 m 之 NCC、LSM 匹配近紅外光影像成果圖 .......... 63 取樣距離 0.25 m 之 NCC、LSM 匹配近紅外光影像 DSM 成果圖. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v. .................................................................................................................... 64 圖 4-15 取樣距離 0.25 m 之 NCC、LSM 匹配近紅外光影像點雲成果圖 64 圖 4-16. 取樣距離 1 m 之 NCC、LSM 匹配紅外彩色影像成果圖 ............. 66 VII.
(14) 圖 4-17 取樣距離 0.5 m 之 NCC、LSM 匹配紅外彩色影像成果圖 .......... 66 圖 4-18 取樣距離 0.25 m 之 NCC、LSM 匹配紅外彩色影像 DSM 成果圖 .................................................................................................................... 67 圖 4-19 取樣距離 0.25 m 之 NCC、LSM 匹配紅外彩色影像點雲成果圖 67 圖 4-20 濾除點雲示意圖 ............................................................................... 70 圖 4-21 濾除後點雲成果圖 ........................................................................... 70 圖 4-22 絕對檢核點空間分佈圖 ................................................................... 71 圖 4-23 NCC 絕對檢核點中誤差曲線圖 ...................................................... 74 圖 4-24 LSM 絕對檢核點中誤差曲線圖 ...................................................... 75 圖 4-25 絕對檢核 NCC 中誤差較大之檢核點位置圖 ................................. 76 圖 4-26 絕對檢核 LSM 中誤差較大之檢核點位置圖 ................................. 77 圖 4-27 相對檢核點空間分佈圖 ................................................................... 78 圖 4-28 NCC 相對檢核點中誤差曲線圖 ...................................................... 80 圖 4-29 LSM 相對檢核點中誤差曲線圖 ...................................................... 81. 點雲增加量成果圖 ........................................................................... 85 各組資料 DSM 成果圖..................................................................... 86. ‧. ‧ 國. 學. io. sit. y. Nat. n. al. er. 圖 4-30 圖 4-31 圖 4-32 圖 4-33. 政 治 大 相對檢核 NCC 中誤差較大之檢核點位置圖 ................................. 82 立 相對檢核 LSM 中誤差較大之檢核點位置圖 ................................. 82. Ch. engchi. VIII. i Un. v.
(15) 表目錄 表 2-1 光達及攝影測量點雲之比較表 .......................................................... 16 表 3-1 影像資訊及相關設定表 ...................................................................... 40 表 4-1 Canon EOS 5D 率定成果表 ................................................................ 49 表 4-2 影像匹配參數設定表 .......................................................................... 55 表 4-3 光束法平差成果表 .............................................................................. 59 表 4-4 各組點雲資料數量表 .......................................................................... 71 各組點雲增加率表 .............................................................................. 83. 立. 政 治 大. 學 ‧. ‧ 國 io. sit. y. Nat. n. al. er. 表 4-5. Ch. engchi. IX. i Un. v.
(16) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v.
(17) 第一章 緒論. 第一節 研究背景. 點雲(point cloud)為以大量三維坐標,描述地表實際情形的資料形式。 傳統上,主動式遙測系統—光達(LIght Detection And Ranging, LIDAR), 藉儀器發射雷射光束掃描地物,由光達相位中心和待測物體間之方向及距 離,可快速地測得待測物之三維空間坐標,同時可記錄雷射光束的反射強. 治 政 度值,作為該點坐標的光譜屬性資料。而依照不同的載臺,光達可簡分為 大 立 空載和地面兩種,雖然在不同載臺下,其點雲資料會有些許差異,例如: ‧ 國. 學. 平面及高程方向的精度及點雲密度等,但均為快速且大量獲取高密度點雲. ‧. 的方式;光達常以單一波段雷射光束掃描地物,例如:有限度穿越水體的. sit. y. Nat. 綠光波段(0.532 μm) 、對植物有高敏感度的近紅外光波段(1.04 至 1.06 μm). io. er. (Jensen, 2007; Mikhail et al., 2001) ,或是 Bell Labs 研發可同時發射三種不 同雷射波長,其範圍在 6.6 至 8.0 μm 之間的光達系統(Baltsavias, 1999),. n. al. ni Ch 卻缺乏以多波段掃描獲取地物點雲的能力。 U engchi. v. 同時,若以光達獲取點雲,仍會面臨,包含掃描時間差、缺乏可靠邊 緣線及角點資訊、大量離散點雲缺乏語意資訊(semantic information)、難 以直接判讀及點雲缺乏多餘觀測量等問題。雖然光達以快速發射之雷射光 束,獲取大量待測地物點雲,但在掃描時,相較於框幅式攝影測量直接記 錄相機曝光時的地物情形,仍會存有因掃描稜鏡旋轉而造成的時間差 (Detchev et al., 2011) 。而光達掃描時,即使獲取數量可觀的點雲,但由於 無法確認雷射光束是否精確地掃描到明顯特徵物,例如:橋樑斷線或建物 屋角點等,因此不能確定該特徵物資訊是否可靠(王蜀嘉及張祖勛,2006)。 1.
(18) 若僅從離散的點雲資料中,要判釋該點群屬於何種地物或物徵,而缺少輔 助的影像資訊,亦即語意資訊時,則無法有效判讀其中隱含的資訊,例如: 欲濾除樹林區之非地面點,但缺乏影像供判釋之用,濾除勢必困難 (Baltsavias, 1999; Detchev et al., 2011) 。相較於攝影測量匹配重疊影像中的 明顯地物特徵點,在平差求解過程,可獲得多餘觀測量,而光達掃描時獲 得的點雲,除了在重疊區域內有多餘觀測量,可供互相檢核外,其他部分 點雲均缺乏多餘觀測量(王蜀嘉及張祖勛,2006) 。綜合上述,即為以光達 獲取之點雲於測量用途中所遭遇的問題,因此,若能以包含多波段資訊的 記錄方式同步獲取點雲資料,且其包含有效的邊緣線、特徵點資訊、可供. 治 政 隨時調閱的語意資訊及足夠的多餘觀測量,理應有效彌補光達點雲的不 大 立 足。 ‧ 國. 學. 一般攝影測量,藉由感測反射自太陽光之能量,可記錄為二維多光譜. ‧. 影像,其常見波長為藍(0.45 至 0.52 μm) 、綠(0.52 至 0.60 μm) 、紅(0.63. sit. y. Nat. 至 0.69 μm)、近紅外(0.70 至 1.3 μm)等波段。因為不同種類地物,對於. n. al. er. io. 不同光譜範圍均有其特性,若採用多光譜影像於分類時,波段間相異性越. i Un. v. 高,通常可獲得越精確的分類成果;因此蒐集多光譜影像可有效辨識地類,. Ch. engchi. 例如:植物反射大量近紅外光,而水體則易吸收近紅外光,所以可藉近紅 外光波段搭配其他波段,輔助判釋植物及水體。若能匹配多張具重疊區域 的二維多波段影像,經過光束法平差求解後,也可產生具備高精度及高密 度的點雲(王蜀嘉及張祖勛,2006;陳英煥,2007) 。同時,以攝影測量方 式獲取之點雲,可滿足影像為多波段資訊的記錄方式、同步曝光獲取地物 資料、包含明顯的邊緣線及特徵點資訊、可檢視的來源影像及足夠的多餘 觀測量可作為篩檢點雲的依據。 綜合以上所述,因此,以攝影測量方式獲取之點雲,可維持其高精度;. 2.
(19) 並透過匹配多光譜影像,更能保存其更豐富的多波段資訊。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 3. i Un. v.
(20) 第二節 研究動機及目的. 一、研究動機 以往於航空攝影測量中,當以空中三角測量平差解算地物點坐標及建 立數值表面模型(Digital Surface Model, DSM)時,多採用可見光影像為主; 而目前常見之高空間解析度數值航照影像,例如來自:Leica ADS 80 (Airborne Digital Sensor)、Vexcel UltraCam 及 Z / I imaging DMC(Digital Mapping Camera)等之影像,除了記錄可見光波段之外,亦蒐集近紅外光. 政 治 大. 波段影像。但較少直接採用近紅外光波段影像於空三平差,以求解地物點. 立. 坐標及產製 DSM。. ‧ 國. 學. 由於不同種類的地物,在各光譜範圍中的反射強度並不相同,若能取. ‧. 得其近紅外光波段影像,並以影像處理方式製成紅外彩色(color infrared,. sit. y. Nat. CIR)影像,即可利用其光譜特性,獲取特殊反射強度之地物,例如:健康. io. er. 植物反射大量近紅外光,因此可於紅外彩色影像中,有效地辨識植物所在 位置。而以資訊量較可見光影像高的紅外彩色影像,經由影像匹配所產生. n. al. ni Ch 的點雲資料,理應包含更豐富的地物資訊。 U engchi. v. 為獲取大比例尺高空間解析度之影像,以利於研究區域中,近紅外光 波段對不同地物的反射強度,而以非量測型相機獲取攝影測量之影像時, 除了可依航拍方式取得之外,從近景拍攝影像亦是可行的方法,且其和航 拍影像相比之下,其優點為取像方式簡易及拍攝限制條件低。以近景攝影 測量方式量測目標物,只需利用數位相機,拍攝多張目標物之重疊影像, 即可解算目標物之物空間坐標,進而構建其模型;惟在取像時,必須考慮 相機內方位參數率定之問題(鄒芳諭,2010;謝幸宜,2011)。. 4.
(21) 因此本研究利用多波段影像所蘊含的豐富光譜資訊,以近景攝影測量 方式,匹配多張可見光、近紅外光及紅外彩色影像,分別產生可見光、近 紅外光及紅外彩色之點雲資料,再分別建立其 DSM,目的在探討加入近紅 外光波段後,所產生的近紅外光及紅外彩色 DSM,和可見光 DSM 之異同; 並探討該 DSM 是否更能突顯植被區域。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 5. i Un. v.
(22) 二、研究目的 根據前述研究動機,歸納本研究之目的為以下兩點: (一)產製可見光、近紅外光及紅外彩色點雲資料,並分別建立 DSM。 (二)分析匹配所得點雲之有效增加量,並檢核其 DSM 精度。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 6. i Un. v.
(23) 第三節 研究方法及流程. 一、研究方法 本研究以國立政治大學校區之景美溪右岸河堤為實驗區,該區域包含 多種地物,例如:樹木、草地、水泥地、建物等,適合測試不同地物對於 近紅外光波段的反射強度。接著率定實驗用非量測型相機,由於近景攝影 測量中,其物距並非無窮遠,因此率定相機所得之焦距,與取像時的焦距 未必相同。為求得非量測型相機之焦距,需佈設合適之三維率定場,以便. 政 治 大. 求解其精確的內方位參數。. 立. 佈設三維率定場後,以 iWitnessPRO 攝影測量軟體率定實驗用非量測. ‧ 國. 學. 型數位單眼相機 Canon EOS 5D 後,利用近景攝影測量方式,拍攝多張可見. ‧. 光及近紅外光影像,且以影像處理獲得紅外彩色影像;並分別以 TOPCON. sit. y. Nat. Positioning Systems 的 Image Master 近景攝影測量軟體匹配多張高重疊率. io. er. 的影像產生點雲資料,再分別套疊兩組點雲,探討加入近紅外光影像,比 僅使用可見光點雲之助益,亦即,該近紅外光及紅外彩色點雲和可見光點. n. al. ni Ch 雲之異同,以及是否有效增加點雲資料量。 U engchi. v. 而後,選取均勻分佈於實驗區中的明顯特徵點,並實地測量作為檢核 點,接著使用 ESRI(Environment Systems Research Institute)的 ArcGIS 10 軟體,以便比較由 Image Master 自動匹配所獲得之可見光、近紅外光及紅 外彩色點雲,其物空間坐標之精度及增加量,並且分別建立 DSM,最後歸 納實驗結果,提出本研究之結論及建議。. 7.
(24) 二、研究流程 根據上述研究方法,研究流程整理如圖 1-1 所示。 選定實驗區. 率定相機. 攝影. 可見光影像. 近紅外光影像. 立. 政 治 大 紅外彩色影像. ‧ 國. 學. Nat. 近紅外光點雲. io. n. al. 紅外彩色點雲. er. 可見光點雲. sit. y. ‧. 匹配影像蒐集點雲. i n C 分析點雲增加量 U hengchi. v. 建立DSM. 可見光DSM. 近紅外光DSM. 成果檢核及探討. 結論與建議. 圖 1-1. 研究流程圖. 8. 紅外彩色DSM.
(25) 第四節 論文架構. 本論文各章節內容編排如下: 第一章緒論,包含研究背景、動機、目的、方法及流程,分別闡述本 研究重要性及發展性、實際內容與項目。 第二章文獻回顧及理論基礎,承續第一章所提的動機與目的,說明研 究中核心概念,包括:點雲來源、多光譜影像於遙測上之助益、影像匹配 方法及建立數值表面模型,並由其中成果及內容,評估與本研究之關連。. 政 治 大 第三章實驗設計及資料處理,依據第二章整理所得之結論,規劃實驗 立. ‧ 國. 述本研究檢核點雲精度及其增加量的方法。. 學. 內容及流程,分別介紹整體實驗架構,以及研究用資料和處理程序,後敘. ‧. 第四章研究成果及分析,以第三章所規劃之實驗方法展示研究成果,. y. Nat. io. sit. 其中包含率定相機、可見光、近紅外光及紅外彩色點雲產製成果、分析檢. er. 核成果以及建立 DSM。. al. n. iv n C 第五章結論與建議,接續第四章研究成果及分析,探討研究初始目的, hengchi U 歸納研究結論,並建議未來研究方向。. 9.
(26) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 10. i Un. v.
(27) 第二章 理論基礎及文獻回顧 光達可藉由高能量及掃描頻率的雷射光束,快速地獲取數量龐大及密 度極高的地物三維坐標,此資料稱為「點雲」 。依照作業目的及需求,可將 光達搭載於不同載臺,例如:飛機、直升機、火車、車輛及地面(Vosselman et al., 2010; Kremer, 2011; Minten, 2011)。該點雲有多種用途,例如:濾除 非地面點以產製數值高程模型(Digital Elevation Model, DEM)(鄭邦寧, 2008) 、重建三維模型(洪祥恩,2011) 、變遷偵測(黃智遠,2008) 、輔助. 政 治 大 製作樹冠高度模型(Canopy Height Model, CHM) (蕭淳伊,2008;楊旻憲, 立. 影像分類(張祥儀,2008;Haala and Brenner, 1999;Charaniya et al., 2004)、. ‧ 國. 學. 2009)等。而利用攝影測量立體觀測的方式,透過多張具重疊區域的影像, 經由影像匹配及光束法平差(bundle adjustment)求解後,也同樣可獲取大. ‧. 量代表地物三維坐標的點雲(王蜀嘉及張祖勛,2006;陳英煥,2007;蔡. io. sit. y. Nat. 建成,2009)。. n. al. er. 本研究即使用匹配多張數值影像的方式,以便獲得點雲資料,進而建. Ch. i Un. v. 立 DSM,且除匹配一般常見的光學可見光影像之外,同時亦匹配近紅外光. engchi. 及紅外彩色影像,以探討增加近紅外光波段影像匹配所得之點雲,是否比 可見光點雲資料量豐富,以及其 DSM 可否更突顯植被區。以下分為四節, 針對點雲來源、多光譜影像於遙測上的助益、常見影像匹配方法以及建立 數值表面模型,描述理論基礎及各項相關研究,並於最後一節總結文獻回 顧對於後續研究之連結性。. 11.
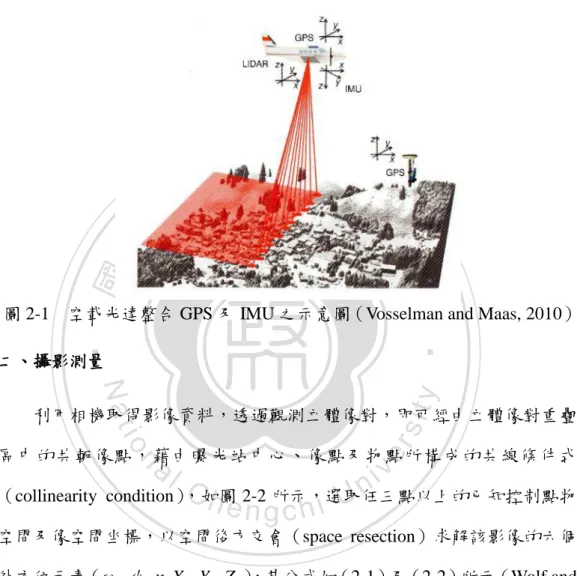
(28) 第一節 點雲來源. 點雲(point cloud)為使用三維坐標(X, Y, Z)記錄物空間實際情形的 資料格式,其中亦包含雷射光反射強度值(intensity)或色彩資訊(RGB) 等。本節旨在說明目前常見的點雲資料來源,包括以主動式雷射掃描技術 獲取點雲之光達,以及用被動式相機拍攝立體像對,並以攝影測量方式匹 配獲得之點雲,最後比較兩種點雲來源的優缺點。 一、光達. 治 政 光達使用雷射測距原理,記錄雷射自儀器發射至待測物,再由待測物 大 立 反射回儀器的時間,測定其距離;並同時記錄由雷射經反射稜鏡發射至待 ‧ 國. 學. 測物的角度,即可以儀器中心建構一極坐標空間,根據接收自物體的雷射. ‧. 光束之距離和角度,便能以向量方式,直接獲取待測物三維坐標。若將光. sit. y. Nat. 達置於飛機載臺上,如圖 2-1 所示,搭配全球定位系統(Global Positioning. io. er. System, GPS)及慣性量測單元(Inertial Measurement Unit, IMU),並歸算 各單元之坐標系統至光達坐標系統後,便可依空載雷射掃描方式,直接獲. al. n. iv n C 取地物精確的三維絕對坐標,而其高程精度通常較平面精度高二至五倍 hengchi U. (Baltsavias, 1999),此為雷射光束於平行測距方向時,具有較高精度的原 因。 而地面光達使用相同測距及測角原理,惟其在使用時,常需要經由多 站掃描後,再利用佈設於待測物表面已知坐標之特殊覘標或明顯特徵點, 套合多站掃描之點雲,並以三維坐標轉換方式,將相對於空間中的點雲對 位至絕對坐標系統中,以取得待測物表面完整的點雲資料,而地面光達之 測距方向精度則通常比其切線方向高。. 12.
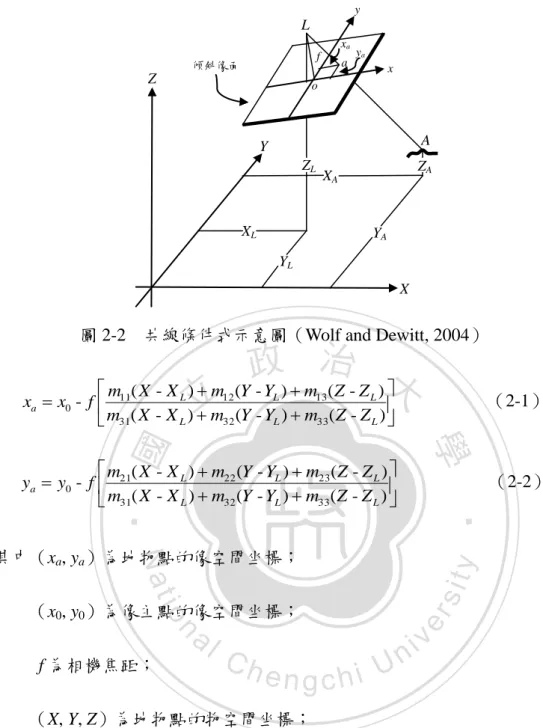
(29) 使用光達測量的優點為主動式遙測系統可於光譜均調區及夜晚或天候 狀況不佳時,仍能有效且快速地大量獲取點雲資料,而所得原始資料即為 三維坐標,可直接應用於量測用途,也較能經由自動或半自動化程序處理 後,做有效的應用。. 立. ‧ 國. 學. 圖 2-1. 政 治 大. 空載光達整合 GPS 及 IMU 之示意圖(Vosselman and Maas, 2010). ‧. 二、攝影測量. sit. y. Nat. io. er. 利用相機取得影像資料,透過觀測立體像對,即可經由立體像對重疊 區中的共軛像點,藉由曝光站中心、像點及物點所構成的共線條件式. al. n. iv n C condition),如圖 所示,選取任三點以上的已知控制點物 h e 2-2 ngchi U. (collinearity. 空間及像空間坐標,以空間後方交會(space resection)求解該影像的六個 外方位元素(ω, ψ, κ, XL, YL, ZL) ,其公式如(2-1)及(2-2)所示(Wolf and Dewitt, 2004):. 13.
(30) y. L xa f. 傾斜像面. Z. a. ya x. o. A. Y ZL. ZA. XA. XL. YA YL X. 圖 2-2. 政 治 大 m ( X - X ) m (Y - Y ) m ( Z - Z ) x - f 立 m ( X - X ) m (Y - Y ) m ( Z - Z ) 11. L. 12. L. 13. L. 31. L. 32. L. 33. L. (2-1). 0. 學. ‧ 國. xa. 共線條件式示意圖(Wolf and Dewitt, 2004). m ( X - X L ) m22 (Y - YL ) m23 ( Z - Z L ) ya y0 - f 21 m31( X - X L ) m32 (Y - YL ) m33 ( Z - Z L ) . (2-2). ‧. n. al. f 為相機焦距;. Ch. engchi. (X, Y, Z)為地物點的物空間坐標; (XL, YL, ZL)為曝光站的物空間坐標;. 14. sit er. io. (x0, y0)為像主點的像空間坐標;. y. Nat. 其中(xa, ya)為地物點的像空間坐標;. i Un. v.
(31) m11 至 m13 為旋轉矩陣元素,各元素公式如下列所示:. m11 cos cos m12 sin sin cos cos sin m13 cos sin cos sin sin m21 cos sin m22 sin sin sin cos cos m23 cos sin sin sin cos m31 sin m32 sin cos m33 cos cos . 政 治 大. (ω, ψ, κ)為曝光站的姿態參數。. 立. 求得各影像之外方位元素後,即可針對立體像對重疊區中,欲求得之. ‧ 國. 學. 地物,以空間前方交會(space intersection) ,即透過曝光站中心和待求地物 的像坐標,使用共線條件式求解,便能獲得其物空間坐標,而以航空攝影. ‧. 測量量測之地物點,其平面精度大約比高程精度高 1/3 倍(Baltsavias, 1999) 。. y. Nat. io. sit. 若依此方式求得大量待測地物的物空間坐標,亦能形成點雲資料(王蜀嘉. n. al. er. 及張祖勛,2006;陳英煥,2007;蔡建成,2009) 。甚至能透過匹配多波段. Ch. i Un. v. 及熱紅外影像,產生包含多波段資訊之點雲(Hoegner and Stilla, 2008;. engchi. Hoegner and Stilla, 2009;Fritsch et al., 2011)。 由於傳統底片式相機拍攝時,受制於底片成本及相機本身限制,拍攝 所得影像之前後重疊率多為 60%、左右重疊率則為 30%,但隨著數位式相 機的普及化,拍攝高重疊率達 80%至 90%的影像已非難題。因此,以透視 幾何方式量測地物點的攝影測量,可能會遇上因為建物高差位移而產生的 遮蔽(occlusion)問題,可藉由匹配多張具有高重疊率的影像,將遮蔽影 響降至最低。而高重疊率也同時代表相同地物點將同時出現在多張影像, 使得匹配影像時的多餘觀測量大幅度提升,改善以往僅有 60%重疊率的影 15.
(32) 像多餘觀測量較少的缺點(王蜀嘉及張祖勛,2006)。 而使用攝影測量獲取點雲之優點為取得之影像無時間差,亦即相機取 像時直接記錄當下的地物情形、可隨時調閱原始影像資料、豐富的多餘觀 測量、點雲位於邊緣線或明顯特徵點,包含多光譜資訊及整體成本較光達 低廉。 三、光達及攝影測量點雲之比較 根據上述兩小節,可依照天氣條件、資料時間差、獲取效率、多光譜 資訊、均調區資料、點雲可靠性、語意資訊、多餘觀測量、自動化程度及. 表 2-1. 光達及攝影測量點雲之比較表 光達. 攝影測量. ‧. 項目. 學. ‧ 國. 治 政 成本各方面,綜合比較光達點雲和攝影測量點雲之優缺點 大 (Baltsavias, 1999; 立 Detchev et al., 2011;王蜀嘉及張祖勛,2006),如表 2-1 所示。. sit. y. Nat. 主動式感測器,可於夜間或 被動式感測器,僅能於光線. 天氣條件. io. er. 較惡劣天候環境蒐集資料。 充足情形下蒐集資料。. al. 雷 射 光 束 經 稜 鏡 轉 動 反 曝光時即記錄當下地物分. iv n C 射,會形成掃描時間差。 h e n g c h佈情形。 i U n. 資料時間差. 高頻率雷射光束掃描,快速 需經過較多程序才可取得 資料獲取效率 且直接取得大量高密度的 代表待測物的三維坐標。 待測物三維坐標。 掃描波長範圍較短,常用於 可記錄的波長範圍長,包含 有限度穿越水體的綠光波 可見光(藍、綠、紅)、近 多光譜資訊 段、對植物有高敏感度的近 紅外光及熱紅外光等。 紅外光波段等。. 16.
(33) 接收反射的雷射光,因此於 色調均調區影像匹配成功 均調區資料. 色調均調區也可獲得大量 率較低,因此點雲密度比光 資料。. 達點雲低。. 無法確定點雲落在地物明 由影像匹配所得之點雲,可 點雲可靠性. 顯之斷線、邊緣線或轉角等 確定其位於明顯邊緣線或 特徵點。. 特徵點。. 透過大量點資料呈現三維 可調閱原始影像資料,核對 語意資訊. 治 政 空間情境,但難以判別該點 大 影像匹配產生的點雲,便於 立 刪除非地面點的依據。. 學. ‧ 國. 群為何處地物;亦難以衡量 判釋其實際對應的地物,有 利於編修點雲。. 觀測量。. 的多餘觀測量大幅度提 升,且利於除錯。. er. io. sit. y. Nat. 多餘觀測量. ‧. 僅能於重疊區內檢核多餘 高重疊率影像,使得匹配時. al. 原始資料即為三維坐標,因 經過影像匹配獲得之三維. n. iv n C 此可直接以適合之演算法 h e n g c h i U坐標較費時,且需要較多人. 自動化程度. 產製 DEM 等,其餘應用, 工介入編修,以獲得較高精 自動化程度高。. 度的 DEM 及其他產品,自 動化程度較光達點雲低。. 不論空載或地面光達,設備 航空影像成本較高,而地面 成本. 均昂貴,使用成本高。. 近景影像之取像設備簡 便,耗費成本低。. 17.
(34) 由表 2-1 可得知,攝影測量點雲僅在天氣條件、資料獲取效率、均調 區資料完整性方面略遜於光達點雲,而在自動化程度上,視產品需求,通 常光達點雲的自動化程度也較攝影測量點雲高。其餘各方面,例如:資料 時間差、多光譜資訊、點雲可靠性、語意資訊、多餘觀測及成本均為攝影 測量點雲較占優勢。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 18. i Un. v.
(35) 第二節 多光譜影像. 被動式遙感探測系統藉由感測太陽光反射或地物本身放射之能量,可 記錄為二維多光譜影像,其常見波長為藍(0.45 至 0.52 μm)、綠(0.52 至 0.60 μm)、紅(0.63 至 0.69 μm)、近紅外(0.70 至 1.3 μm)、中紅外(1.3 至 3.0 μm)及遠紅外(3.0 至 14.0 μm) ,又稱為熱紅外波段(Thermal Infrared, TIR)(Jensen, 2007)。由於不同種類的地物,在不同光譜範圍中均有其特 性,若使用多光譜影像於分類時,波段間相異性越高,通常可獲得越詳細. 政 治 大 健康植物常反射大量近紅外光,所以可藉由近紅外光波段搭配如可見光之 立 的分類成果。因此,蒐集多光譜影像可有效地提升辨識地類的能力,例如:. ‧ 國. 學. 綠紅波段,即能有利於分類時判釋植物。. 地物對於反射電磁波的強度不盡相同,因此以感測器記錄不同波長之. ‧. 反射能量,並製成反射曲線圖,可協助了解不同地物在各個波長的反射率,. y. Nat. sit. 藉由其獨特的反射曲線判別地物。通常蒐集可見光影像,僅能得到波長 0.4. n. al. er. io. 至 0.7 μm 的地物反射曲線;而增加其他波段資料,如近紅外光(Near Infrared,. Ch. i Un. v. NIR),則可取得可見光波長範圍以外的反射曲線,能更有效增加分辨地類. engchi. 的依據。本節後續分為兩部分,分別說明近紅外光波段之特性,並整理相 關應用點雲及多光譜影像的研究。 一、近紅外光波段 近紅外光為接近紅光外側之波段,其波長範圍介於 0.7 至 1.3 μm 之間, 植物對於近紅外光波段的反射特性,有助於從影像中區分出植物和其他地 物,由光譜反射曲線圖當中,如圖 2-3 所示,即可發現健康植物在綠光波 段的反射率為一局部高峰,原因為植物中的葉綠素會吸收位於藍光及紅光 波段的能量,以便行光合作用製造養分,因此這兩個波段亦稱為「葉綠素 19.
(36) 吸收波段」 (chlorophyll absorption bands) (Jensen, 2007) ;由於反射較多綠 光,所以人眼看見的植物才會呈現綠色;而至紅光波段時,其反射率下降, 但在近紅外光波段時,其反射率則快速上升達到約 46%,主要原因是健康 植物中的葉綠素反射強烈的近紅外光波段,且在紅光至近紅外光波段,波 長約 0.7 至 0.8 μm 的部分,光譜反射曲線急遽的上升,稱為「紅邊效應」 (red edge) (Seager et al., 2005; Jensen, 2007) ,因此使其成為辨識植物健康 狀況的有利指標(蕭淳依,2008) ;而光譜曲線在接近中紅外光波段時,其 反射率在 1.5 μm 及 1.9 μm 處皆再度下降,起因於葉內細胞液及細胞膜的水 份吸收所致(潘國樑,2009)。. 政 治 大 因此,以可見光搭配近紅外光波段製成紅外彩色影像辨識地物時,可 立. ‧ 國. 學. 利用植物紅邊效應的特性,有效地區分天然植物和人工建物,此為使用近 紅外光波段最有利於辨識之地物(Henricsson et al., 1996)。. y. 水份. Nat. n. al. sit. 吸收 水份 吸收. er. io. 40. ‧. 50. 反 30. Ch. engchi. v. 水份. 射 紅邊效應 率. i Un. 吸收. 20. (%) 水份 10. 0. 圖 2-3. 葉綠素吸收波段. 0.5. 吸收. 1. 1.5 波長 (μm). 2. 2.5. 健康植物光譜反射曲線圖(Seager et al., 2005). 20.
(37) 二、結合點雲和多光譜影像之研究 關於整合光達點雲和遙測影像的應用方面,包含產製高精度的 DEM、 萃取樹木資訊、變遷偵測、輔助影像分類等,而以多波段影像經由攝影測 量方式獲取點雲資料,則應用於貼附建物材質和文物保存等。 鄭邦寧(2008)應用小波演算法內插生成網格化地形初始面,並以網 格資料結合 Geodesic Dilation 法、高程差及高程變化率,判斷重新篩選的機 制,逐步將光達點雲分類為地面點與非地面點,而其過程中亦參考多光譜 影像,計算常態化差異植生指數(Normalized Difference Vegetation Index,. 政 治 大. NDVI)值,以過濾植物點雲,進一步產製 DEM。. 立. 蕭淳依(2008)採用空載光達點雲和遙測影像,估算樹林分佈面積及. ‧ 國. 學. 覆蓋體積,先過濾空載光達非地面點建立 DEM,以此為樹林覆蓋體積的基. ‧. 礎面,再利用影像光譜特性,以共線條件式過濾樹林點雲,並以其和 DEM. sit. y. Nat. 計算 CHM,最後累計樹冠網格範圍再乘上高程差,求得樹林覆蓋體積。. n. al. er. io. 賴君怡(2008)亦採取空載光達點雲和航照多光譜影像,利用適應性. i Un. v. 點雲過濾演算法濾除非地面點,並由剩餘的非地面點和利用多光譜影像求. Ch. engchi. 得之 NDVI 影像,以共線條件式篩選出植物區點雲,再針對萃取之植物點 雲建置樹木模型。 楊旻憲(2009)則以空載光達點雲與 SPOT 5 多光譜影像,萃取阿里山 地區主要樹種之樹冠特徵,獲得 CHM,並將其二維網格化後,加入多光譜 影像,探討以不同尺寸罩窗運算所求得之樹高資訊及精度。 黃智遠(2008)以後期獲得的光達點雲之三維形狀資訊,即為描述真 實世界中地表覆蓋面高低起伏的情形;和二維多光譜資訊,以偵測前期實 驗區向量式房屋資料的變遷形態。 21.
(38) Haala 及 Brenner(1999)使用紅外彩色影像,包含近紅外光、紅光及 綠光,再加上正規化後的 DSM 為第四波段,並以非監督式分類,有效地萃 取出建物及植物區域,便於後續建置模型之用。 張祥儀(2008)以空載光達點雲之 DSM 為一新波段,加入原本的可見 光及近紅外光波段中,以監督式分類,將地物成功地分為樹木、植生地、 道路及裸露地及建物。 Hoegner 及 Stilla(2008; 2009)固定熱像儀視角並裝置於車輛上,沿著 道路攝取建物之熱紅外影像,以便偵測熱逸散情況。此研究利用尺度不變. 政 治 大. 特徵轉換(Scale-Invariant Feature Transform, SIFT)影像匹配法求得各組熱. 立. 紅外影像像對之點雲資料,而後套合該點雲至已知建物模型之絕對坐標系,. ‧ 國. 學. 並以共線式倒投影法製作材質影像貼附於建物表面,最終以三維視覺化方 式呈現建物之熱散失部位。. ‧. sit. y. Nat. Fritsch 等人(2011)設計一低成本的近景攝影測量載臺,包含五部非. io. er. 量測型相機及一組 Microsoft Kinect 訊號發射器,於距離欲保存之牆面石雕 約 70 cm 處,拍攝 2,000 組影像產製點雲資料,以便依數值方式保存石雕。. al. n. iv n C 由於牆面石雕色澤及紋理過於均調,使得影像難以成功匹配,因此利用 hengchi U. Microsoft Kinect 發射近紅外光點狀光源,作為匹配時的特徵點。載臺周圍 的四部相機各裝置 670 nm 的近紅外光濾鏡,以約 90%之前後及左右重疊率 獲取近紅外光影像,匹配影像產生點雲資料;中央的可見光相機則用以獲 取點雲之光譜資訊。 綜合以上各研究可得知,結合點雲和多光譜影像兩者之優勢,有利於 提升研究成果。因此本研究除使用可見光影像外,亦匹配近紅外光及紅外 彩色影像產生點雲資料,並建立 DSM,以探討包含豐富光譜資訊影像所生 成之 DSM,其幾何關係之精確性。 22.
(39) 第三節 影像匹配. 傳統攝影測量當中,欲從影像重疊區域中尋找共軛像點,以便後續立 體觀測作業,需以人工辨識方式選取左右像對中的明顯物徵點,雖然準確 度高,但作業效率較低;而數值攝影測量當中,以往以人工辨識方式找尋 共軛像點的步驟,可利用電腦視覺領域的影像匹配演算法,有效地自動化, 並提升作業效率。而影像匹配獲取共軛像點的主要目的可分為兩者,即為 解算重疊立體像對間的相對方位和自動化產製數值高程模型(McGlone et al., 2004)。. 立. 政 治 大. 根據不同影像匹配方法,可分為三大類別,分別為 區域匹配法. ‧ 國. 學. (area-based matching)、特徵匹配法(feature-based matching)以及混合匹 配法(hybrid matching) (Wolf and Dewitt, 2004) 。區域匹配法以參考影像上. ‧. 目標點為中心,利用罩窗運算,搜尋重疊像對中,影像區塊的灰階值最相. y. Nat. io. sit. 似區域,以便求得共軛像點;特徵匹配法需先萃取像對中的特徵,例如:. n. al. er. 點、線或面,之後,再比較相同特徵物之屬性及評估其一致性,以求得共. Ch. i Un. v. 軛像點;而混合匹配法則包含上述兩種影像匹配方法,首先偵測像對中明. engchi. 顯特徵物,再以區域匹配法求得共軛像點。 由於本研究所使用之近景攝影測量軟體 TOPCON Positioning Systems 的 Image Master,其運用最常見的區域匹配法,包含標準化互相關法 (Normalized Cross Correlation, NCC)及最小自乘匹配法(Least Squares Matching, LSM)兩種影像匹配演算法(TOPCON Positioning Systems Inc, 2008),因此以下分別說明此兩種影像匹配法之原理及優缺點。. 23.
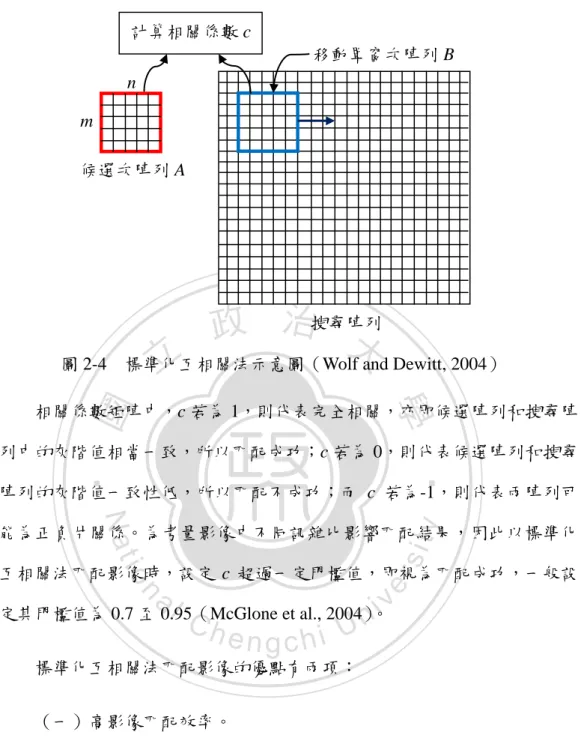
(40) 一、標準化互相關法 標準化互相關法為一以統計運算為基礎的影像匹配法,透過計算左像 及右像於候選陣列及搜尋陣列中,重疊區域之影像灰階值互相關係數 (Cross Correlation Coefficient)最大者,視為最佳匹配位置。而此方法可 於左像及右像中分別選取相同大小(例如:m × n)的次陣列 A 及 B,以計 算兩者之相關係數 c(Wolf and Dewitt, 2004),其公式如(2-3)所示:. A m. c. n. ij. i 1 j 1. . A Bij B . (2-3). m n m n 2 2 A A ij Bij B i 1 j 1 i 1 j 1 . 政 治 大. 立. ‧ 國. 學. 其中 c 為相關係數,值域介於 -1 至 1 之間; m、n 分別為次陣列 A、B 之列與行總數;. ‧. sit. y. Nat. Aij、Bij 分別為次陣列 A、B 中第 i 列第 j 行之像元位置;. n. al. er. io. A 、 B 分別為次陣列 A、B 中所有像元灰階值之平均數。. Ch. i Un. v. 以標準化互相關法匹配影像時,需先選定左像上一候選點像元為中心,. engchi. 選取一 m × n 陣列作為候選次陣列 A,再於右像上設計一較候選陣列大的 搜尋陣列,以便尋找共軛像點,而與候選陣列相同大小的移動罩窗次陣列 B, 即在搜尋陣列中,依公式(2-3)計算相關係數 c,取得相關係數矩陣。最 後,於相關係數矩陣中最大 c 值,若超過設定之門檻值,即視為匹配點位 置。其示意圖如圖 2-4 所示。. 24.
(41) 計算相關係數 c 移動罩窗次陣列 B n m 候選次陣列 A. 立. 標準化互相關法示意圖(Wolf and Dewitt, 2004). 學. ‧ 國. 圖 2-4. 政 治搜尋陣列 大. 相關係數矩陣中,c 若為 1,則代表完全相關,亦即候選陣列和搜尋陣 列中的灰階值相當一致,所以匹配成功;c 若為 0,則代表候選陣列和搜尋. ‧. 陣列的灰階值一致性低,所以匹配不成功;而 c 若為-1,則代表兩陣列可. y. Nat. io. sit. 能為正負片關係。為考量影像中不同訊雜比影響匹配結果,因此以標準化. n. al. er. 互相關法匹配影像時,設定 c 超過一定門檻值,即視為匹配成功,一般設. Ch. i Un. v. 定其門檻值為 0.7 至 0.95(McGlone et al., 2004)。. engchi. 標準化互相關法匹配影像的優點有兩項: (一)高影像匹配效率。 (二)像對間亮度差不會影響匹配成果。 由於該匹配演算法僅需計算影像中相關係數,因此於匹配時能維持其 高效率。而由公式(2-3)可得知,需將影像標準化後再計算相關係數,所 以可消除不同亮度對影像的影響;而缺點則為影像間不同的比例及旋轉因 子容易影響匹配成果。因為移動罩窗運算過程,僅考慮影像間平移問題, 25.
(42) 而對於不同拍攝視角所形成之透視幾何問題,則無法有效克服(TOPCON Positioning Systems Inc, 2008)。 二、最小自乘匹配法 最小自乘匹配法旨在求得候選陣列和搜尋陣列中,像元灰階值差異量 最小之處,視為最佳匹配位置。而此影像匹配法,因為以最小自乘法平差 求解最佳配置位置,所以可獲得次像元(subpixel)之精度等級,其最常見 的最小自乘匹配法,公式如(2-4)、(2-5)、(2-6)所示(Wolf and Dewitt, 2004):. 政 治 大 Ax, y h h Bx, y (2-4) 立 1. 學. ‧ 國. 0. (2-5). y b0 b1x b2 y. (2-6). ‧. x a0 a1x a2 y. sit. y. Nat. io. al. er. 其中 A(x, y)為左像候選次陣列中,(x, y)位置上的像元灰階值;. n. B x, y 為右像搜尋次陣列中, x, y 位置上的像元灰階值;. Ch. engchi. i Un. v. h0 為輻射平移參數;h1 為輻射比例參數; a0, a1, a2, b0, b1, b2 為仿射轉換參數。. 由(2-5)及(2-6)式,即可求得左像中(x, y)位置上的像元,對應至右 像 x, y 時的像元位置,如圖 2-5 所示。合併(2-4) 、 (2-5)及(2-6)式, 可得最小自乘間接觀測方程式,如(2-7)式:. f h0 h1Ba0 a1x a2 y, b0 b1x b2 y Ax, y VA 其中 f 為相關兩像數值函數; 26. (2-7).
(43) VA 為殘差,其他項係數和前述定義相同。 而(2-7)式為非線性式,因此於解算時,需以泰勒展開式線性化,再迭代 運算,求得八項未知參數 h0, h1, a0, a1, a2, b0, b1, b2 之改正數。 右像. 左像. 搜尋次陣列 B. 候選次陣列 A. y. x. 最小自乘匹配次陣列位置示意圖(Wolf and Dewitt, 2004). ‧. 圖 2-5. x’. 學. ‧ 國. 立. 政 治 y’ 大. sit. y. Nat. 最小自乘匹配法的優點有三項:. n. al. er. io. (一)可克服影像幾何變形。 (二)高精度。. Ch. engchi. i Un. v. (三)誤差傳播原理。 使用最小自乘匹配法匹配影像時,比起標準化互相關法僅能解決之平 移問題,其可同時克服像對間不同比例及旋轉因子的問題。由於此影像匹 配演算法以最小自乘平差解算,因此可求至次像元精度,若選取適當的匹 配次陣列,可達到約 0.01 至 0.02 個像元的精度。亦可利用最小自乘平差結 果,以評估轉換參數的精度。 惟缺點則為欲使用最小自乘匹配法時,由於其容易受到雜訊影像,因. 27.
(44) 此根據不同影像品質,需提供準確的初始值才可成功匹配影像(McGlone et al., 2004;TOPCON Positioning Systems Inc, 2008)。. 第四節 數值表面模型. 數值高程模型為以數值、離散化方式,描述並記錄地表之起伏,其資 料內容僅儲存地表裸土之高程資訊,並不包含其上之附加物,例如:植被、 建物等。而 DSM 與 DEM 不同之處,在於 DSM 中不僅包含地表裸土高程 資訊,同時亦儲存其上附加物之高程資訊,因此能完整呈現區域中的地表. 政 治 大. 面實際情形(McGlone et al., 2004) 。至於數值地形模型(Digital Terrain Model,. 立. DTM)則是利用 DEM 萃取地形特徵,例如:高程、坡度、坡向、曲率、. ‧ 國. 學. 粗糙度等,再加上水文、土壤、地質以及太陽輻射等資訊,經過數值地形 分析(Digital Terrain Analysis, DTA)後,所獲得之綜合資訊(周啟鳴及劉. ‧. 學軍,2006),而上述數值模型均為製圖及分析應用上的重要產品。. sit. y. Nat. io. er. DSM 的資料來源主要為地面測量、攝影測量、光達測量及雷達干涉技 術。地面測量使用全測站或 GPS 獲得地形特徵點之三維坐標,雖然精度高,. al. n. iv n C 但是耗時長亦費人力,且所獲取之資料點數量密度低,作業區域也較受到 hengchi U 地形限制。攝影測量則利用航空或衛星影像解算空中三角測量,求得地面 點坐標,進而建立 DSM,可用於大範圍製圖,且能到達地勢險峻區域,而 於地勢明顯變化之區域,如坡度變化極大之處,可獲取較高密度之資料, 便於在 DSM 中呈現;但其影像品質易受到雲霧等天候因素影像。光達測量 為快速取得地表三維坐標的方式,該點雲資料經由內插後,即可建立 DSM; 但需留意其斷線或邊緣線位置是否正確。雷達干涉技術適用於大範圍立體 製圖,且雷達波可穿透雲層及水氣,惟組成雷達干涉像對之條件較為嚴苛。 獲取建立 DSM 之資料後,可利用兩種常用的資料結構儲存並分析 DSM, 28.
(45) 分別為規則網格及不規則三角網,以下分別說明,並敘述其優缺點。 一、規則網格 內插點雲成為 XY 平面的規則網格,而把高程值 Z 視為該網格的灰階 值。以此種方式儲存資料的優點為有效減少資料量,且規則化的網格亦可 加快資料搜尋速度,同時可利用二維影像處理技術,例如:偵測邊緣線、 區域成長法等,作為資料處理工具,萃取其點、線及面特徵。但缺點為點 雲資料中,若同一組平面坐標 XY 對應到許多不同的高程值 Z,因為受制 於資料格式,則單一網格中,僅能儲存一項高程值 Z,因而失去原始資料 的精度。. 立. 政 治 大. 若內插點雲時,選用不同空間內插法,例如:最鄰近法(Nearest. ‧ 國. 學. Neighbor) 、距離反比加權法(Inverse Distance Weighted)及克里金法(Kriging). ‧. 等,則所得之規則網格 DSM 會略有不同;加上內插點雲為規則網格時,選. sit. y. Nat. 擇不同的地面解析度(Ground Sampling Distance, GSD)亦會獲得不同的結. io. er. 果。若 GSD 太大,則地表細節或變化劇烈之區域無法於 DSM 中呈現,例 如:建物邊緣線或地形斷線非位於網格整數位置上,或者山區於小範圍內. al. n. iv n C 高程變化劇烈,因而遭到忽略;反之,若 U 太小,則高程變化不明顯的 h e n g c h iGSD. 地區會佔用過多資料儲存空間,例如:平坦地高程一致,卻耗費儲存空間 記錄多筆相同資料。 二、不規則三角網 以不規則三角網(Triangulated Irregular Network, TIN)結構化點雲時, 各筆點資料都是 TIN 中的節點,此節點於物空間均視為地形特徵點,因此 構成一系列互相不垂直、不相交的三角形,而眾多三角形再形成三角網, 以描述地表起伏變化。而此三角形的建立方法需遵循以下三項原則(周啟. 29.
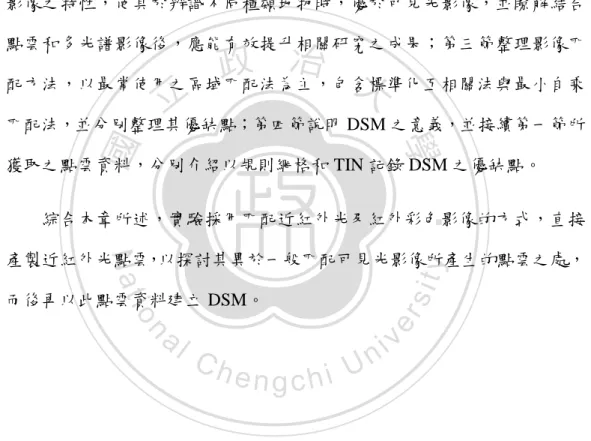
(46) 鳴及劉學軍,2006),分別為: (一)形狀盡量接近正三角形。 (二)以最鄰近點構成三角形。 (三)此三角網為唯一。 由於 TIN 當中,越狹長的三角形其內插精度比三邊越接近的三角形低, 因此組成 TIN 時,各三角形若越接近正三角形,則整體精度越佳;而其所 組成的三角形需為最鄰近點,並且構成唯一解,亦即輸入相同的點雲資料,. 政 治 大. 經過 TIN 結構化以後,每次運算均得到相同之 TIN 結構。. 立. 若比較 TIN 和規則網格對於描述真實地表的準確性,可由圖 2-6 說明,. ‧ 國. 學. 其中較為曲折的綠色線段、藍色線段及紅色虛線分別表示真實地表、以規 則網格和以 TIN 呈現之地表,因為 TIN 和規則網格均為近似表達真實地表. ‧. 起伏的資料結構,所以與真實地表相比尚存在些許差異。由圖 2-6 中可知,. y. Nat. io. sit. TIN 於地形特徵變化明顯處其呈現較規則網格準確,例如:左側山坡起伏. n. al. er. 及右側山頂處即有明顯差異。而 TIN 可於地表高程明顯變化處呈現斷線資. Ch. i Un. v. 訊,因此能完整保留重要地形特徵,並且於地形平坦處,TIN 則能以面積. engchi. 較大的三角網呈現高程變化,可有效消除高程相同,卻耗費過多儲存空間 的問題。因此 TIN 和規則網格比較下,優點為忠實地呈現斷線資訊,且可 避免因內插處理而喪失原始資料精度的問題,但會面臨的問題為 TIN 需要 額外儲存點、線及面關係,對於資料量龐大的點雲而言,將是一大負擔(王 淼 等人,2005)。. 真實地表 以規則網格呈現 以 TIN 呈現 30.
(47) 圖 2-6. 以 TIN 準確呈現真實地表示意圖(McGlone et al., 2004). 第五節 小結. 本章回顧及整理與本研究相關之研究,從獲取點雲資料到加入多波段 影像,影像匹配方式及建立 DSM 之方法。由第一節可知如何以空間交會方 式獲取攝影測量點雲,以及其相較於光達點雲之優勢;第二節回顧多光譜 影像之特性,使其於辨識不同種類地物時,優於可見光影像,並瞭解結合 點雲和多光譜影像後,應能有效提升相關研究之成果;第三節整理影像匹. 治 政 大 配方法,以最常使用之區域匹配法為主,包含標準化互相關法與最小自乘 立 匹配法,並分別整理其優缺點;第四節說明 DSM 之意義,並接續第一節所. ‧ 國. 學. 獲取之點雲資料,分別介紹以規則網格和 TIN 記錄 DSM 之優缺點。. ‧. 綜合本章所述,實驗採用匹配近紅外光及紅外彩色影像的方式,直接. sit. y. Nat. 產製近紅外光點雲,以探討其異於一般匹配可見光影像所產生的點雲之處,. n. al. er. io. 而後再以此點雲資料建立 DSM。. Ch. engchi. 31. i Un. v.
(48) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 32. i Un. v.
(49) 第三章 實驗設計 本章主要敘述實驗規劃、資料處理流程及成果檢核方法,包括介紹實 驗區、相機率定、資料來源、影像處理與檢核方式。. 第一節 實驗規劃. 以下分別介紹實驗區相關資訊,包含選擇原因、控制點與檢核點空間 分佈位置、相機率定設置及取像設定。. 立. 一、實驗區. 政 治 大. ‧ 國. 學. 為了研究加入近紅外光影像匹配產生點雲之成果,實驗區選用富含植 物生長、多種地形環境的景美溪畔河堤,其全長約 200 m,寬約 60 m,總. ‧. 涵蓋面積約為 14,000 m2,如圖 3-1 所示;地面平坦處包含草地、裸土及柏. y. Nat. io. sit. 油路面,其上則有高程變化明顯的樹木、呈規則間距分佈的路燈及欄杆;. er. 河堤至路面則為斜坡面。. al. n. iv n C 由於實驗區缺乏足夠數量的明顯物徵點,因此先行於實驗區,佈設均 hengchi U 勻分佈於實驗區的黑白覘標,視之為控制點。控制測量則以即時動態測量 GPS-RTK(Real Time Kinematic),求得平面坐標及引測自臺北市政府都市 發展局公告之水準點,求得其高程值,獲取實驗區對岸道路上共 8 個包含 X、Y、Z 坐標之已知點,如圖 3-1 ( a )所示;再於已知點上架設全測站,觀 測對岸實驗區中明顯物徵點及黑白覘標作為攝影三角測量 (phototriangulation)解算之用,最終測得 64 個地面控制點。本研究選擇 其中 28 個控制點,其餘 36 個則作為檢核 DSM 成果之檢核點,而空間分佈 如圖 3-2 所示,相關控制點及檢核點點位資料與精度,詳見附錄。 33.
(50) 實驗區範圍. P1 至 P8 為已知點. 立. 政 治 大. ‧ 國. 學 ‧. ( a ) 俯視圖(取自 Google Earth). n. er. io. sit. y. Nat. al. Ch. engchi. ( b ) 側視圖 圖 3-1 實驗區範圍圖. 34. i Un. v.
(51) S R C. B. F G. E. TU. V. 控制點 共 28 個. H L. M O. D J. I. A. N P. W Y. Q. 檢核點 共 36 個. X Z. AA BB. ( a ) P2 點視角 S R. 政 治 大 NN KK. 立. ‧ 國. EE GG. DD. Nat. PP. sit. y. II. io. al. ( b ) P4 點視角. n. KK. WW. FF HH JJ. CC. U. LL MM. VV. SS. Ch. V. engchi. NN. TT QQ. i Un. v. FFF. SS. AAA. UU VV. PPP QQQ RRR SSS ZZ. NNN. BBB CCC. ( c ) P7 點視角 圖 3-2. III. EEE. WW YY. KKK GGG. RR. OO. PP. er. Z. AA. TT UU QQ. ‧. Y. X. OO RR. 學. W. V LL MM. U. T. 控制點及檢核點分佈圖 35.
(52) 二、相機率定 本研究為考量近景攝影測量中,由於物距非無窮遠,而造成率定所得 之焦距,和實際取像時的焦距不同。因此於率定相機時,除了固定焦距, 並且對焦至無窮遠處以外,亦需考量率定時的取像距離,應接近實際取像 時之距離,才可獲得較精確之內方位參數,包含焦距、像主點位置、透鏡 輻射及離心畸變差等參數。 而本研究使用之近景攝影測量軟體 Image Master,雖然具備率定功能, 但僅提供平面率定模版,如圖 3-3 ( a )所示,其無法有效符合實際拍攝實驗. 政 治 大. 區影像時,不同景深的情況;而 Photometrix 的 iWitnessPRO 則提供可三維. 立. 佈設之率定模版,於率定相機時,可將共 20 組不同形狀的模版,如圖 3-3 ( b ). ‧ 國. 學. 所示,均勻分佈於率定場中,且需佈設率定模版於相異平面上,維持不同 景深達 15 至 20 cm,其率定效果較佳(Photometrix, 2010)。. ‧. sit. y. Nat. 因此,為符合本研究之取向距離較遠的緣故,因此選用可於較長攝影. io. er. 距離,拍攝率定用影像的攝影測量軟體— iWitnessPRO,為本研究之率定軟 體,並以實地率定法(field methods) (Wolf and Dewitt, 2004) ,其中各率定. al. n. iv n C 模版之相對位置均為已知值,再設置兩個不同之三維率定場,並固定相機 hengchi U. 焦距,且對焦至無窮遠處後,於距離率定模版 10 m 處拍攝率定用影像,以 便率定研究用之非量測型相機。該設置如圖 3-4 ( a )與( b )所示,而佈設兩 個率定場的目的,為比較佈設於不同景深與幾何分佈的率定模版,可否求 得相同精確的內方位參數,其中三維率定場 1 的特色為中央部分率定模版 的景深,較其餘牆面處的率定模版突出約 1.2 m,而窗戶處率定模版則較牆 面凹陷約 0.6 m;三維率定場 2 的特色為率定模版幾何分佈較接近影像形狀 之長方形,而其率定模版的景深差距,則約為 1 m。兩率定場解算之率定 成果,詳見第四章第一節。 36.
(53) 1. 1. 2. 2. 1. 1. 2. 2. 3. 3. 4. 4. 3. 3. 4. 4. 立. 政 治 大. ( a ) Image Master 率定模版 (TOPCON Positioning Systems Inc., 2008). ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. v. ( b ) iWitnessPRO 率定模版 (Photometrix, 2010) 圖 3-3 Image Master 及 iWitnessPRO 率定模版圖. 37.
(54) 學. ‧ 國. 立. 政 治 大. ( a ) 三維率定場 1. ‧. n. er. io. sit. y. Nat. al. Ch. engchi. i Un. ( b ) 三維率定場 2 圖 3-4 三維率定場佈設圖. 38. v.
(55) 三、資料來源 本研究以非量測型數位相機獲取近紅外光影像,首先需測試研究用之 Canon EOS 5D 數位單眼相機是否具備感測近紅外光能力,因此設定測試環 境,如圖 3-5 所示在相機透鏡前,安裝可通過 0.72 μm 以上波長的近紅外光 濾鏡,並安裝相機於腳架後,次面對相機,操縱一般遙控器,發射近紅外 光,並於影像中確認該相機是否具備近紅外光感測能力,以蒐集研究用之 近紅外光影像。 確定此相機可攝取近紅外光影像後,即固定相機於腳架上,並且固定. 政 治 大. 焦距,對焦至無窮遠處,拍攝實驗區之可見光影像,再於鏡頭前裝置近紅. 立. 外光濾鏡,攝取同一視角之近紅外光影像,而後以平行於實驗區的方向搬. ‧ 國. 學. 動腳架,移往下一個位置,拍攝可見光及近紅外光影像,依此近似於航空 攝影之方式攝取影像,惟攝影方向由 Z 軸變為 X 軸,如圖 3-6 所示。本研. ‧. 究在實驗區內,以攝影距離約 100 m,獲得左右重疊率 96%的可見光及近. y. Nat. io. sit. 紅外光影像共 35 組。加裝近紅外光濾鏡後,因光通量較低,故取像時,需. n. al. er. 延長曝光時間,以便獲取較清晰的影像,供後續攝影三角測量解算之用,. Ch. 其影像資訊及相關設定如表 3-1 所示。. engchi. i Un. v. ( a ) 測試設置 ( b ) 可感測近紅外光 圖 3-5 測試 Canon EOS 5D 感測近紅外光能力圖. 39.
(56) N. Y 實. X. S1. 驗. ……. S2. 區. S34. S35. 相機移動方向 圖 3-6. 立. 政 治 大 攝影位置設定圖. ‧. ‧ 國. 學. n. 濾鏡波長(μm). al. 影像資訊及相關設定表 可見光. Ch. e--n g c h i. er. io. sit. y. Nat 表 3-1. 影像類別. S 為曝光站位置. i Un. v 近紅外光. 像素(pixels). 4368 × 2912. 0.72 4368 × 2912. ISO 值. 640. 640. 光圈. F / 16. F / 16. 曝光時間(秒). 1 / 500. 1.6. 40.
(57) 第二節 資料處理. 利用非量測型相機,取得 35 組可見光及近紅外光影像後,次處理這些 數值影像,獲得近紅外光及紅外彩色影像,提供後續解算攝影三角測量及 產製點雲之用。以下分別敘述近紅外光影像與合成紅外彩色影像之處理方 式。 一、近紅外光影像 實驗用可見光及近紅外光影像如圖 3-7 ( g )與( h )所示,而圖 3-7 ( h ). 治 政 所指的原始近紅外光影像為裝置近紅外光濾鏡時,拍攝所得之影像。由於 大 立 取像時,使用腳架固定拍攝之緣故,所以取得之近紅外光影像和可見光影 ‧ 國. 學. 像均為相同取像距離、視角及涵蓋範圍。. ‧. 數位相機拍攝所得之近紅外光影像,又可分為紅、綠、藍三個影像位. sit. y. Nat. 元面,簡稱為紅、綠、藍像面,如圖 3-7 ( d )、( e )與( f )所示,此三個像面. n. al. er. io. 即和可見光影像經過分解所獲得之紅、綠、藍波段相同,如圖 3-7 ( a )、( b ). i Un. v. 與( c )所示。其中近紅外光紅像面影像保留最豐富的資訊;而近紅外光綠像. Ch. engchi. 面影像,雖然仍保有影像資訊,但整體灰階值偏低,影像偏暗,需增強影 像才能有效辨識當中細節;近紅外光藍像面影像則缺乏影像資訊,其影像 呈黑色,難以辨識影像內容。經由前述影像處理方式評估後,本研究決定 使用的近紅外光影像為近紅外光紅像面影像,而後續研究所提及之近紅外 光影像,意指近紅外光紅像面之灰階影像。. 41.
(58) ( a ) 可見光紅像面 紅像面 綠像面 藍像面. 可見光影像. ( b ) 可見光綠像面. 立. 政 治 大. ‧ 國. 學. ( c ) 可見光藍像面. ‧. n. er. io. sit. y. Nat. al. Ch. i Un. v. ( d ) 近紅外光紅像面. engchi. 紅像面. 綠像面 近紅外光影像. 藍像面. ( e ) 近紅外光綠像面. ( f ) 近紅外光藍像面. 42.
(59) ( g ) 可見光影像. 紅像面 綠像面 紅外彩色影像 藍像面. 立. 政 治 大( h ) 原始近紅外光影像. ‧. ‧ 國. 學. n. al. 影像處理示意圖. sit. 圖 3-7. er. io. 二、紅外彩色影像. y. Nat. ( i ) 紅外彩色影像. Ch. engchi. i Un. v. 紅外彩色影像亦稱為假彩色(false color)影像,其影像組成方式為紅、 綠與藍像面,分別以近紅外光、紅光及綠光波段表示,因此反射強烈近紅 外光的植物,在紅外彩色影像中呈現紅色,如圖 3-7 ( i )所示。 而本研究中之紅外彩色影像,即分解可見光影像為紅、綠和藍三像面, 如圖 3-7 ( a )、( b )與( c )所示,搭配前述影像處理所得之近紅外光紅像面為 近紅外光影像,組合成紅、綠與藍像面分別為近紅外光紅波段、可見光紅 波段及可見光綠波段之紅外彩色影像,其影像處理方式詳見圖 3-7。. 43.
(60) 第三節 成果檢核方法. 經由 Image Master 匹配所得之各組點雲資料,需透過檢核點,以求得 該組資料之均方根誤差(Root Mean Square Error, RMSE) ,提供評估後續建 立 DSM 品質之依據。此部分分別使用 ESRI 的 ArcMap 10 及 ArcScene 9.3 執行之,而本節說明後續檢核成果的方法,各為絕對精度和相對精度兩種, 以下分別敘述之。 一、絕對精度檢核. 治 政 Image Master 於解算攝影三角測量時,可提供地面控制點坐標,因此 大 立 於產生點雲資料時,各筆點資料均已位於實際物空間位置,不需再透過任 ‧ 國. 學. 何三維坐標轉換,即可計算其和檢核點之間的中誤差,進而求取 RMSE,. ‧. 此為絕對精度檢核。. sit. y. Nat. 而實際檢核方法如圖 3-8 所示,由 Image Master 分別獲取可見光、近. er. io. 紅外光及紅外彩色點雲資料,並利用前述第一節中所提及的實地測量之明. n. al. i Un. v. 顯物徵點為檢核點,而後以人工方式分別找出各組相對應的點資料,並計. Ch. engchi. 算其和檢核點間的中誤差,最後計算 RMSE,以評估各組點雲資料之絕對 精度。. 可見光點雲. 近紅外光點雲. 紅外彩色點雲. 實地測量之檢核點. 可見光點雲 RMSE. 圖 3-8. 近紅外光點雲 RMSE. 紅外彩色點雲 RMSE. 絕對精度檢核流程圖. 44.
數據

+2
相關文件
國立政治大學應用數學系 林景隆 教授 國立成功大學數學系 許元春召集人.
例如,參閱:黃啟江,《因果、淨土與往生:透視中國佛教史上的幾個面 相》〈第六章·從佛教研究法談佛教史研究書目資料庫之建立〉,(台北:臺 灣學生書局,2004 年),頁 237-252; Yasuhiro
學博士,現為上海大學文學院教 授,兼任佛光山人間佛教研究院
「臺北中學校」 ,至民國 36 年奉令更 名為 「臺北市私立泰北中學」 ,除音相 近外,更取 「泰山北斗」 之義。泰山為 五嶽之長,古代帝王常以來此封禪為大
樹、與隨機森林等三種機器學習的分析方法,比較探討模型之預測效果,並獲得以隨機森林
近年來,國內外已經有很多學術單位投入 3D 模型搜尋的研究,而且在網路 上也有好幾個系統提供人使用,例如台灣大學的 3D Model Retrieval
中華大學應用數學研究所 研 究 生:黃仁性 敬啟 指導教授:楊錦章 教授 中華民國九十六年..
本研究探討空氣流量及轉爐石量對於 Chlorella sp.生長之表面物 化特及釋出有機物性質影響,可透過傅立葉轉換紅外線光譜(Fourier transform
