行政院國家科學委員會專題研究計畫 成果報告
軌道車輛之動態分析及實車測試驗證(2/2)
研究成果報告(完整版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 95-2221-E-002-229- 執 行 期 間 : 95 年 08 月 01 日至 96 年 10 月 31 日 執 行 單 位 : 國立臺灣大學機械工程學系暨研究所 計 畫 主 持 人 : 吳文方 計畫參與人員: 碩士班研究生-兼任助理:何鴻翔、韋鐘豪 臨時工:張耀文、陳予涵 報 告 附 件 : 出席國際會議研究心得報告及發表論文 處 理 方 式 : 本計畫可公開查詢中 華 民 國 96 年 12 月 13 日
行政院國家科學委員會補助專題研究計畫
■ 成 果 報 告
□期中進度報告
軌道車輛動態模擬分析與實車振動試驗(2/2)
Dynamic Analysis of Railway Vehicles and Its Verification through
Full-Scale Field Tests (2/2)
計畫類別:■ 個別型計畫
□ 整合型計畫
計畫編號:
NSC 95-2212-E-002-229
執行期間:95 年 8 月 1 日至 96 年 7 月 31 日
(申請並獲准延期至 96/10/31)
計畫主持人:
吳文方 國立台灣大學機械工程學系
共同主持人:
計畫參與人員:
何鴻翔、韋鐘豪 國立台灣大學機械工程學系
成果報告類型(依經費核定清單規定繳交):□精簡報告
■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
(另檔繳交)
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:
國立台灣大學機械工程學系
中
華
民
國
96
年
12
月
12
日
摘要
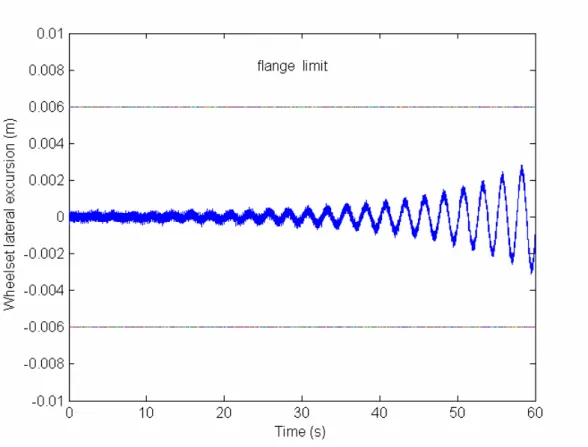
在以往的研究中,有許多學者建立過不同的軌道車輛動態分析模型,但這些 模型往往過於簡易,導致所算出的動態特性與列車的實際行駛狀況有所差異,本 研究不考慮車輛縱向加速度及上下顛簸的情況,但考慮車輪圓錐度、軌道不平整 與潛滑力等因素,提出了一具 28 個自由度的軌道車輛動態分析模型,並以美國聯 邦鐵路局所訂定的軌道不平整能量頻譜密度函數為主要輸入,模擬軌道車輛於各 種不同的行駛條件下的動態響應,並特別探討車輛於高承載狀況下,在直軌和彎 軌行駛時,動態響應的不同,同時以 Nadal ratio 與輪軸減重率兩種指標來進行安 全評估。本研究以台北捷運系統所使用的列車為分析的對象,研究結果顯示,列 車於高承載並行駛於彎軌時,輪軸組的橫向位移量較無承載時大了數倍,且隨著 曲率的增加而增大;而軌道等級的不同也影響橫向位移的大小,其中一級軌道狀 況對輪軸組所造成的位移量幾為其他軌道等級的數倍;此外,高承載下的行駛, 會使得輪軸組的橫向位移量較低承載時,提早超出規定的上限值 6 mm,並增加出 軌的風險。 關鍵詞:軌道車輛、動態分析、軌道不平整、出軌ABSTRACT
A 28-degree–of-freedom dynamical model is established in the present study to simulate the responses of rapid transit vehicles. The model takes wheel conicity, creep force, track irregularity, etc. into consideration. Among them, the power spectral density function of track irregularity proposed by US Federal Railroad Administration (FRA) is considered the major input. Dynamical simulation of rapid transit vehicles under various suspensions, vehicle velocities, loads, wheelflats, and track irregularities are performed and compared. The investigation also covers situations when the vehicle is fully loaded with passengers and moves on either straight or curved tracks. Both Nadal ratio and wheel-load reduction ratio are used to evaluate the possibility of vehicle derailment. Through the study, it is found that, when the railway vehicle is fully loaded with passengers and runs at curved tracks, the lateral displacement of the wheelset is several-time greater than that of the empty train. The displacement increases as the curvature increases. The degree of track irregularity also affects the lateral displacement of the wheelset. In particular, the displacement caused by track irregularity of level one is several-time greater than that caused by track irregularities of other levels. It may exceed the limit value of 6 mm set by Taipei Rapid Transit Corporation when the vehicle is fully loaded with passengers.
目錄
摘要...I ABSTRACT...II 目錄...III 表目錄...VI 圖目錄...VII List of Notations...XIII第一章 導論...1
1-1 前言...1 1-2 文獻回顧...1 1-3 本報告架構...2第二章 軌道車輛之建模分析...4
2-1 座標設定...4 2-2 輪軸組受力關係式...4 2-3 轉向架受力關係式...7 2-4 車體受力關係式...8 2-5 懸吊系統平衡關係式...9 2-6 潛滑力...12 2-7 運動方程式...12第三章 數值模擬與安全指標探討...28
3-1 軌道不平整輸入...28 3-2 振幅分析...29 3-3 安全指標...30 3-3-1 Nadal ratio...30 3-3-2 輪軸減重率...31 3-4 數值模擬...31第四章 懸吊系統設計與車輛穩定度分析...42
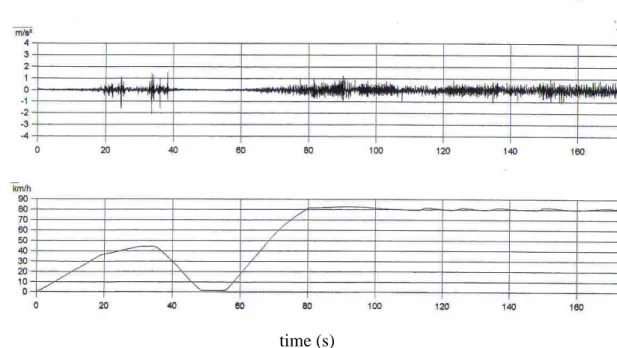
4-1 懸吊設計...424-1-1 次懸吊系統設計...42 4-1-2 主懸吊系統設計...43 4-2 軌道車輛穩定度分析...43 4-2-1 數值模擬結果...44 4-2-2 實車測試...45
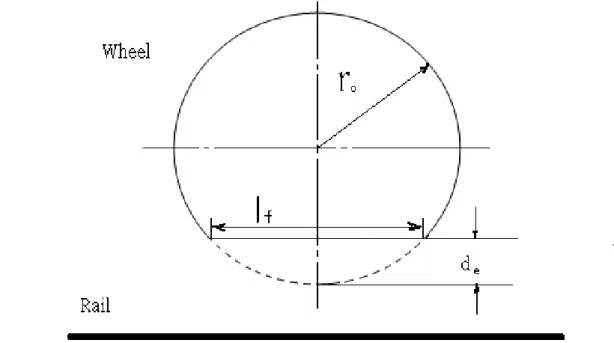
第五章 鋼輪磨平下的動態效應...60
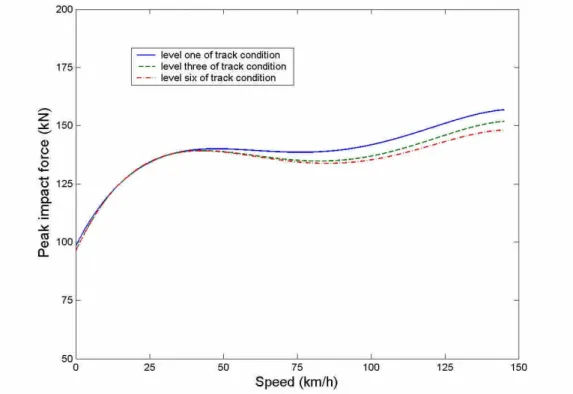
5-1 鋼輪磨平...60 5-2 鋼輪磨平的出軌評比...60 5-3 影響衝擊力的參數研究...61 5-3-1 負重和列車速度的影響...61 5-3-2 軌道不平整的影響...61 5-3-3 鋼輪磨平深度的影響...61 5-3-4 軌道勁度的影響...62 5-3-5 主懸吊系統勁度的影響...62 5-4 鋼輪磨平對橫向力的影響...62 5-4-1 鋼輪磨平對主懸吊系統垂直作用力的影響...62 5-4-2 鋼輪磨平對次懸吊系統垂直作用力的影響...63 5-4-3 鋼輪磨平對次懸吊系統橫向作用力的影響...63 5-4-4 鋼輪磨平對出軌比的影響...64第六章 高承載下的安全評估...79
6-1 承載狀況與彎軌...79 6-2 動態分析與安全評估...79 6-3 不同軌道等級下的行駛狀況...81第七章 軌道車輛遇地震時之模擬探討...106
7-1 自由度的改變...106 7-2 地震輸入...106 7-3 遇地震時之直軌動態分析與安全評估...107第八章 結論...117
8-1 結論...117
參考文獻...119
計畫成果自評...122
表目錄
表2-1 軌道車輛運動模型各自由度代表變數...16 表2-2 自訂係數表(輪軸組)...17 表2-3 自訂係數表(轉向架)...19 表2-4 自訂係數表(車體)...21 表3-1 軌道不平整能量頻譜密度函數表(PSD)...33 表3-2 輪軸組與軌道不平整之位移與速度變數表...34 表3-3 世界各國軌道車輛系統所設定之Nadal ratio (出軌比)...35 表3-4 台北捷運局軌道車輛標準參數表...36 表3-5 潛滑係數與輪軌接觸參數表...37 表4-1 動態穩定性之模擬結果...47 表4-2 車體橫向位移量之模擬結果...48 表4-3 轉向架之最大橫向加速度...49 表5-1 鋼輪磨平深度1mm下Nadal ratio變化值...65 表5-2 時 速 80 km/hr 下 , 不 同 軌 道 等 級 與 鋼 輪 磨 平 深 度 之 Nadal ratio...66 表7-1 世界各國震度分級表...108 表7-2 地震輸入之位移與速度變數表...109圖目錄
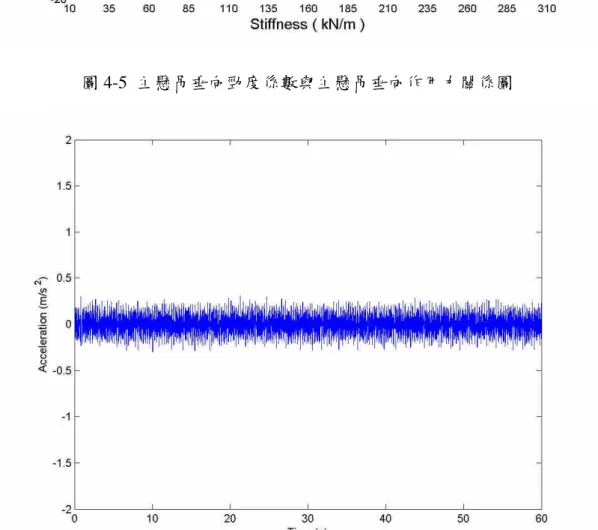
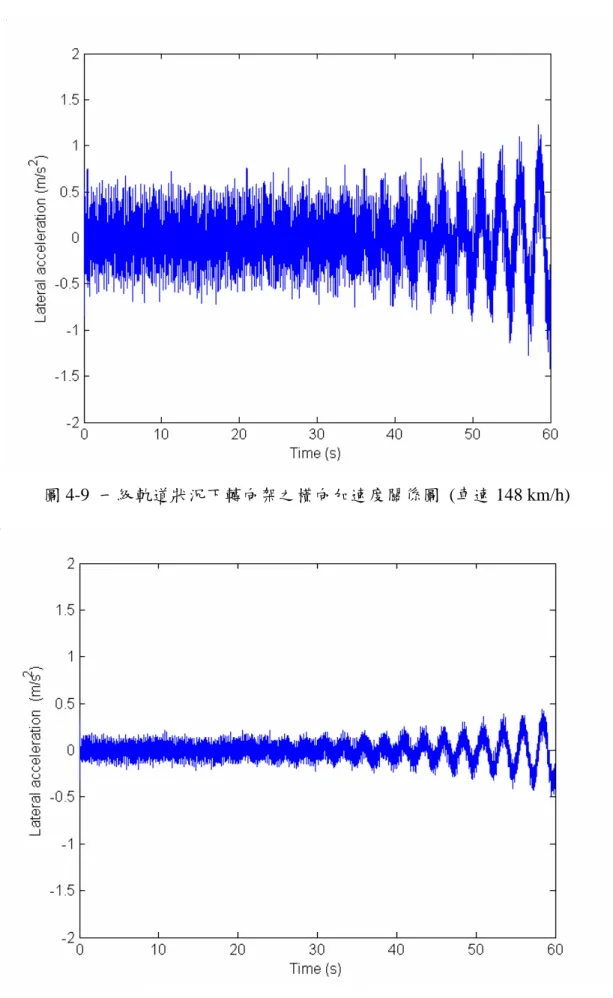
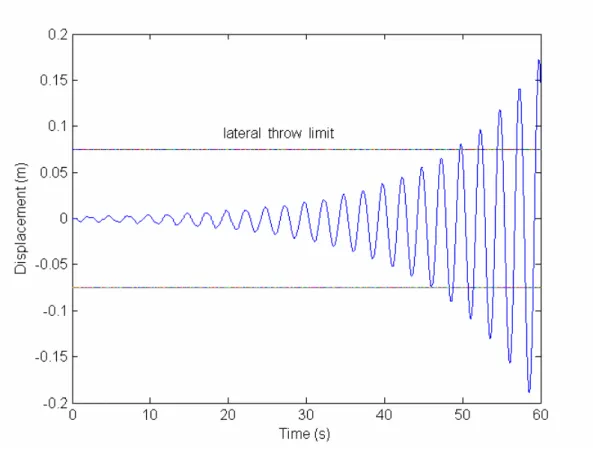
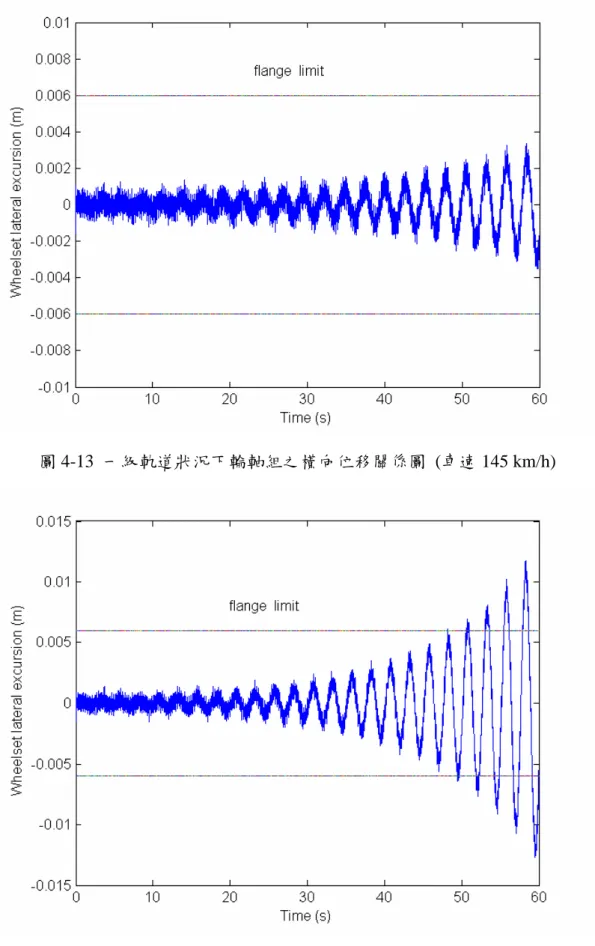
圖2-1 軌道車輛模型示意圖...23 圖2-2 軌道車輛運動座標系...23 圖2-3 第一組輪軸組自由體圖...24 圖2-4 第二組輪軸組自由體圖...24 圖2-5 第三組輪軸組自由體圖...25 圖2-6 第四組輪軸組自由體圖...25 圖2-7 前轉向架自由體圖...26 圖2-8 後轉向架自由體圖...26 圖2-9 車體之自由體圖...27 圖2-10 輪軌接觸力示意圖...27 圖3-1 高低不整與方向不整示意圖...38 圖3-2 水平與方向軌道不平整能量頻譜密度函數 (車速80 km/h)...38 圖3-3 軌道之勁度係數與阻尼係數示意圖...39 圖3-4 軌道車輛行駛於彎軌示意圖...39 圖3-5 軌道車輛行駛之衝擊角示意圖...40 圖3-6 爬上型出軌之過程圖...40 圖3-7 輪軌接觸受力示意圖...41 圖3-8 滾動接觸示意圖...41 圖4-1 次懸吊橫向勁度係數與次懸吊橫向振幅關係圖...50 圖4-2 次懸吊垂向勁度係數與次懸吊垂向作用力關係圖...50 圖4-3 主懸吊橫向勁度係數與主懸吊橫向振幅關係圖...51 圖4-4 主懸吊橫向勁度係數與主懸吊橫向作用力關係圖...51 圖4-5 主懸吊垂向勁度係數與主懸吊垂向作用力關係圖...52 圖4-6 一級軌道狀況下轉向架之橫向加速度關係圖 (車速80 km/h)...52 圖4-7 一級軌道狀況下轉向架之橫向加速度關係圖 (車速90 km/h)...53 圖4-8 一 級 軌 道 狀 況 下 轉 向 架 之 橫 向 加 速 度 關 係 圖 ( 車 速 145km/h)...53圖4-9 一 級 軌 道 狀 況 下 轉 向 架 之 橫 向 加 速 度 關 係 圖 ( 車 速 148 km/h)...54 圖4-10 六 級 軌 道 狀 況 下 轉 向 架 之 橫 向 加 速 度 關 係 圖 ( 車 速 150 km/h)...54 圖4-11 一 級 軌 道 狀 況 下 車 體 之 橫 向 位 移 量 關 係 圖 ( 車 速 148 km/h)...55 圖4-12 六級軌道狀況下車體之橫向位移量關係圖 (車速150 km/h)...55 圖4-13 一 級 軌 道 狀 況 下 輪 軸 組 之 橫 向 位 移 量 關 係 圖 ( 車 速 145 km/h)...56 圖4-14 一 級 軌 道 狀 況 下 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 車 速 150 km/h)...56 圖4-15 六 級 軌 道 狀 況 下 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 車 速 150 km/h)...57 圖4-16 六級軌道狀況下輪軸組之橫向位移關係圖 (車速160 km/h)...57 圖4-17 感測器裝置位置示意圖...58 圖4-18 空空車重量下軌道車輛之穩定度測試結果 (車速80 km/h)...59 圖4-19 空車重量下軌道車輛之穩定度測試結果 (車速90 km/h)...59 圖5-1 鋼輪磨平示意圖...67 圖5-2 有鋼輪磨平之Nadal ratio變化圖 (車速80 km/h)...67 圖5-3 有鋼輪磨平之Nadal ratio變化圖 (車速150 km/h)...68 圖5-4 不同負重且有無鋼輪磨平時之衝擊力對速度變化圖...68 圖5-5 不同軌道等級之衝擊力對速度變化圖 (考慮W1負重且無鋼輪磨 平)...69 圖5-6 不同軌道等級之衝擊力對速度變化圖 (考慮W1負重且有鋼輪磨 平)...69 圖5-7 不同鋼輪磨平深度之衝擊力對速度變化圖 (W1負重)...70 圖5-8 不同鋼輪磨平深度之衝擊力對軌道勁度係數變化圖 (考慮 W1 負重 且時速 80 km/h)...70 圖5-9 不同鋼輪磨平深度之衝擊力對主懸吊勁度係數變化圖 (考慮 W1 負
重且時速 80 km/h)...71 圖5-10 不同軌道等級之輪軸組橫向力對速度變化圖 (W1負重)...71 圖5-11 不同軌道等級之輪軸組橫向力對速度變化圖 (W3負重)...72 圖5-12 不同軌道等級之主懸吊系統垂向力對速度變化圖 (考慮W1負重且無 鋼輪磨平無鋼輪)...72 圖5-13 不同軌道等級之主懸吊系統垂向力對速度變化圖 (考慮 W1 負重且 有鋼輪磨平)...73 圖5-14 不同軌道等級之次懸吊系統垂向力對速度變化圖 (考慮 W1 負重且 無鋼輪磨平)...73 圖5-15 不同軌道等級之次懸吊系統垂向力對速度變化圖 (考慮 W1 負重且 有鋼輪磨平)...74 圖5-16 不 同 鋼 輪 磨 平 深 度 之 次 懸 吊 系 統 垂 向 力 對 速 度 變 化 圖 (W1 負 重)...74 圖5-17 次懸吊系統垂向力對鋼輪磨平深度變化圖 (考慮不同負重且時速80 km/h)...75 圖5-18 不同鋼輪磨平深度之次懸吊系統垂向力對軌道勁度變化圖 (考慮 W1 負重與時速 80 km/h)...75 圖5-19 不同軌道等級之次懸吊系統橫向力對速度變化圖 (考慮不同負重且 時速 80 km/h)...76 圖5-20 不同軌道等級之次懸吊系統橫向力對鋼輪磨平深度變化圖 (考慮不 同負重且時速 80 km/h)...76 圖5-21 不同軌道等級之前 15 秒 Nadal ratio 對速度變化圖 (考慮 W1 負重且 無鋼輪磨平)...77 圖5-22 不同軌道等級之前 15 秒 Nadal ratio 對速度變化圖 (考慮 W1 負重且 有鋼輪磨平)...77 圖5-23 不同鋼輪磨平深度之Nadal ratio對速度變化圖 (W1負重)...78 圖6-1 直軌高承載下第一輪軸組之橫向位移關係圖...83 圖6-2 直軌高承載下第四輪軸組之橫向位移關係圖...83
圖6-3 直軌高承載下第一輪軸組之垂向位移關係圖...84 圖6-4 直軌高承載下第四輪軸組之垂向位移關係圖...84 圖6-5 直軌高承載下輪軸組之橫向加速度關係圖...85 圖6-6 直軌高承載下輪軸組之垂向加速度關係圖...85 圖6-7 直軌高承載下前轉向架之橫向位移關係圖...86 圖6-8 直軌高承載下車身之橫向位移關係圖...86 圖6-9 直軌高承載下前轉向架之垂向位移關係圖...87 圖6-10 直軌高承載下車身之垂向位移關係圖...87 圖6-11 直軌高承載下之Nadal ratio變化圖...88 圖6-12 直軌高承載下之輪軸減重率變化圖...88 圖6-13 彎 軌 無 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 3,500 m)...89 圖6-14 彎 軌 無 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 3,500 m)...89 圖6-15 彎 軌 無 承 載 下 之 輪 軸 減 重 率 變 化 圖 ( 曲 率 半 徑 3,500 m)...90 圖6-16 彎 軌 高 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 3500 m)...90 圖6-17 彎 軌 高 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 3,500 m)...91 圖6-18 彎 軌 高 承 載 下 之 輪 軸 減 重 率 變 化 圖 ( 曲 率 半 徑 3,500 m)...91 圖6-19 彎 軌 無 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 1,500 m)...92 圖6-20 彎 軌 無 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 1,500 m)...93 圖6-21 彎 軌 高 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 1,500 m)...94 圖6-22 彎 軌 高 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 1,500
m)...95 圖6-23 彎 軌 無 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 200 m)...96 圖6-24 彎 軌 無 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 200 m)...97 圖6-25 彎 軌 高 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 ( 曲 率 半 徑 200 m)...98 圖6-26 彎 軌 高 承 載 下 之 Nadal ratio 變 化 圖 ( 曲 率 半 徑 200 m)...99 圖6-27 直 軌 高 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 (class 3)...100 圖6-28 直 軌 高 承 載 下 轉 向 架 、 車 身 之 橫 向 位 移 關 係 圖 (class 3)...100 圖6-29 直 軌 高 承 載 下 第 一 輪 軸 組 之 垂 向 位 移 關 係 圖 (class 3)...101 圖6-30 直軌高承載下轉向架、車身之垂向位移關係圖 (class 3)...101 圖6-31 直 軌 高 承 載 下 第 一 輪 軸 組 之 橫 向 位 移 關 係 圖 (class 6)...102 圖6-32 直軌高承載下轉向架、車身之橫向位移關係圖 (class 6)...102 圖6-33 直 軌 高 承 載 下 第 一 輪 軸 組 之 垂 向 位 移 關 係 圖 (class 6)...103 圖6-34 直軌高承載下轉向架、車身之垂向位移關係圖 (class 6)...103 圖6-35 彎軌高承載下第一.輪軸組之橫向位移關係圖 (class 3,曲率半徑 3,500 m)...104 圖6-36 彎軌高承載下第一輪軸組之橫向位移關係圖 (class 6,曲率半徑3,500 m)...104 圖6-37 彎軌高承載下不同軌道等級之輪軸組橫向位移關係圖 (曲率半徑 1,500 m)...105 圖6-38 彎軌高承載下不同軌道等級之輪軸組橫向位移關係圖 (曲率半徑200 m)...105
圖7-1 前 半 車 體 的 轉 向 架 之 橫 向 加 速 度 關 係 圖 ( 車 速 80 km/h)...110 圖7-2 TAP005橫向地表加速度歷程...110 圖7-3 TAP005垂向地表加速度歷程...111 圖7-4 TAP005橫向地表位移歷程...111 圖7-5 TAP005垂向地表位移歷程...112 圖7-6 考慮地震與軌道不平整下前輪軸組之橫向 位移關係圖 (車速80 km/h)...112 圖7-7 考慮地震與軌道不平整下前輪軸組之垂向 位移關係圖 (車速80 km/h)...113 圖7-8 四級地震輸入之Nadal ratio (車速80 km/h)...113 圖7-9 四級地震輸入之輪軸減重率 (車速80 km/h)...114 圖7-10 僅考慮橫向地震與軌道不平整下前輪軸組之橫向位移關係圖 (車速 80 km/h)...114 圖7-11 僅考慮橫向地震與軌道不平整下前輪軸組之垂向位移關係圖 (車速 80 km/h)...115 圖7-12 僅考慮垂向地震與軌道不平整下前輪軸組之橫向位移關係圖 (車速 80 km/h)...115 圖7-13 僅考慮垂向地震與軌道不平整下前輪軸組之垂向位移關係圖 (車速 80 km/h)...116
List of Notations
Symbol Meaning
a Half gauge-length of rail track
a
A Roughness constant of alignment
c
A Roughness constant of cross-level
c Cant
C Damping matrix
px
C Longitudinal damping of primary suspension
py
C Lateral damping of primary suspension
pz
C Lateral damping of primary suspension
ry
C Lateral damping of rail
rz
C Vertical damping of rail
sx
C Longitudinal damping of secondary suspension
sy
C Lateral damping of secondary suspension
sz
C Vertical damping of secondary suspension
B
d Half clearance of primary suspension at bogie side
Bs
d Half clearance of secondary suspension at bogie side
cs
d Half clearance of secondary suspension at carbody side
w
d Half clearance of primary suspension at wheelset side
11
f Lateral creep force coefficient
12
f Lateral/Spin creep force coefficient
22
f Spin creep force coefficient
33
f Longitudinal creep force coefficient
ey
F Lateral force due to earthquake
ez
F Vertical force due to earthquake
lcy
lfy
F Lateral flange contact force at left wheel
lfz
F Vertical flange contact force at left wheel
rcy
F Lateral creep force at contact point of right wheelset
rfy
F Lateral flange contact force at right wheel
rfz
F Vertical flange contact force at right wheel
1
liy
F Lateral force of first wheelset due to left rail irregularity
2
liy
F Lateral force of second wheelset due to left rail irregularity
3
liy
F Lateral force of third wheelset due to left rail irregularity
4
liy
F Lateral force of fourth wheelset due to left rail irregularity
1
liz
F Vertical force of first wheelset due to left rail irregularity
2
liz
F Vertical force of second wheelset due to left rail irregularity
3
liz
F Vertical force of third wheelset due to left rail irregularity
4
liz
F Vertical force of fourth wheelset due to left rail irregularity
1
lpwy
F Lateral force of primary suspension of left first wheelset
2
lpwy
F Lateral force of primary suspension of left second wheelset
3
lpwy
F Lateral force of primary suspension of left third wheelset
4
lpwy
F Lateral force of primary suspension of left fourth wheelset
1
lpwz
F Vertical force of primary suspension of left first wheelset
2
lpwz
F Vertical force of primary suspension of left second wheelset
3
lpwz
F Vertical force of primary suspension of left third wheelset
4
lpwz
F Vertical force of primary suspension of left fourth wheelset
1
lsBy
F Lateral force of secondary suspension of left front bogie
2
lsBy
F Lateral force of secondary suspension of left rear bogie
1
lsBz
F Vertical force of secondary suspension of left front bogie
2
lsBz
F Vertical force of secondary suspension of left rear bogie
1
riy
2
riy
F Lateral force of second wheelset due to right rail irregularity
3
riy
F Lateral force of third wheelset due to right rail irregularity
4
riy
F Lateral force of fourth wheelset due to right rail irregularity
1
riz
F Vertical force of first wheelset due to right rail irregularity
2
riz
F Vertical force of second wheelset due to right rail irregularity
3
riz
F Vertical force of third wheelset due to right rail irregularity
4
riz
F Vertical force of fourth wheelset due to right rail irregularity
1
rpwy
F Lateral force of primary suspension of right first wheelset
2
rpwy
F Lateral force of primary suspension of right second wheelset
3
rpwy
F Lateral force of primary suspension of right third wheelset
4
rpwy
F Lateral force of primary suspension of right fourth wheelset
1
rpwz
F Vertical force of primary suspension of right first wheelset
2
rpwz
F Vertical force of primary suspension of right second wheelset
3
rpwz
F Vertical force of primary suspension of right third wheelset
4
rpwz
F Vertical force of primary suspension of right fourth wheelset
1
rsBy
F Lateral force of secondary suspension of right front bogie
2
rsBy
F Lateral force of secondary suspension of right rear bogie
1
rsBz
F Vertical force of secondary suspension of right front bogie
2
rsBz
F Vertical force of secondary suspension of right rear bogie
g Acceleration of gravity
B
h Vertical distance frombogie’scenterofmassto primarysuspension
Bs
h Vertical distance frombogie’scenterof mass to secondary suspension
cs
h Vertical distance fromcarbody’scenterofmasstosecondary suspension
1
x
B
I Rolling moment of inertia of front bogie
2
x
B
I Rolling moment of inertia of rear bogie
1
z
B
2
z
B
I Yawing moment of inertia of rear bogie
x
c
I Rolling moment of inertia of carbody
z
c
I Yawing moment of inertia of carbody
1
x
w
I Rolling moment of inertia of first wheelset
2
x
w
I Rolling moment of inertia of second wheelset
3
x
w
I Rolling moment of inertia of third wheelset
4
x
w
I Rolling moment of inertia of fourth wheelset
1
y
w
I Spinning moment of inertia of first wheelset
2
y
w
I Spinning moment of inertia of second wheelset
3
y
w
I Spinning moment of inertia of third wheelset
4
y
w
I Spinning moment of inertia of fourth wheelset
1
z
w
I Yawing moment of inertia of first wheelset
2
z
w
I Yawing moment of inertia of second wheelset
3
z
w
I Yawing moment of inertia of third wheelset
4
z
w
I Yawing moment of inertia of fourth wheelset
K Stiffness matrix
K Safety factor for Nadal criteria
px
K Longitudinal stiffness of primary suspension
py
K Lateral stiffness of primary suspension
pz
K Vertical stiffness of primary suspension
ry
K Lateral stiffness of rail
rz
K Vertical stiffness of rail
sx
K Longitudinal stiffness of secondary suspension
sy
K Lateral stiffness of secondary suspension
sz
K Vertical stiffness of secondary suspension
B
cs
l Distance between center of bogie and center of carbody
M Inertia matrix
1
B
m Mass of front bogie
2
B
m Mass of rear bogie
c
m Mass of carbody
1
w
m Mass of first wheelset
2
w
m Mass of second wheelset
3
w
m Mass of third wheelset
4
w
m Mass of fourth wheelset
lcx
M Rolling creep moment at contact point of left wheelset
lcz
M Yawing creep moment at contact point of left wheelset
rcx
M Rolling creep moment at contact point of right wheelset
rcz
M Yawing creep moment at contact point of right wheelset
1
lxBx
M Rolling moment of secondary suspension of left front bogie
2
lxBx
M Rolling moment of secondary suspension of left rear bogie
1
lsBz
M Yawing moment of secondary suspension of left front bogie
2
lsBz
M Yawing moment of secondary suspension of left rear bogie
1
rsBx
M Rolling moment of secondary suspension of right front bogie
2
rsBx
M Rolling moment of secondary suspension of right rear bogie
1
rsBz
M Yawing moment of secondary suspension of right front bogie
2
rsBz
M Yawing moment of secondary suspension of right rear bogie
1
lpwx
M Rolling moment of primary suspension of left first wheelset
2
lpwx
M Rolling moment of primary suspension of left second wheelset
3
lpwx
M Rolling moment of primary suspension of left third wheelset
4
lpwx
M Rolling moment of primary suspension of left fourth wheelset
1
lpwz
2
lpwz
M Yawing moment of primary suspension of left second wheelset
3
lpwz
M Yawing moment of primary suspension of left third wheelset
4
lpwz
M Yawing moment of primary suspension of left fourth wheelset
1
rpwx
M Rolling moment of primary suspension of right first wheelset
2
rpwx
M Rolling moment of primary suspension of right second wheelset
3
rpwx
M Rolling moment of primary suspension of right third wheelset
4
rpwx
M Rolling moment of primary suspension of right fourth wheelset
1
rpwz
M Yawing moment of primary suspension of right first wheelset
2
rpwz
M Yawing moment of primary suspension of right second wheelset
3
rpwz
M Yawing moment of primary suspension of right third wheelset
4
rpwz
M Yawing moment of primary suspension of right fourth wheelset
N Normal force
1
l
N Normal force at left first wheel contact point
2
l
N Normal force at left second wheel contact point
3
l
N Normal force at left third wheel contact point
4
l
N Normal force at left fourth wheel contact point
1
r
N Normal force at right first wheel contact point
2
r
N Normal force at right second wheel contact point
3
r
N Normal force at right third wheel contact point
4
r
N Normal force at right fourth wheel contact point
P Wheel load
Q Total vertical force
R Curving radius of rail track
0
r Nominal radius of wheel
a
S Alignment power spectral density
c
S Cross-level power spectral density
V Forward speed of rail vehicle
Y Total lateral force
Flange angle
Wheel conicity
Friction coefficient between wheelset and rail
x Longitudinal creepage y Lateral creepage sp Spin creepage Spatial frequency 1 Break frequencies 2 Break frequencies ct
第一章 導論
1-1 前言
交通運輸建設為許多國家努力的目標,它可以帶動一個國家的經濟發展,就 歷史的軌跡而言,軌道車輛的發展,影響交通運輸最深。軌道運輸系統藉著導軌 誘導軌道車輛,其包含的範圍非常廣泛,有台灣現有的台鐵、捷運及已通車的高 鐵等,以及木柵線膠輪捷運、單軌鐵路、磁浮鐵路、輕軌捷運等皆是軌道運輸系 統的一種。如最近中國的青藏鐵路,不僅能為當地帶來觀光商機,提升經濟效益 外,也讓全球的人都能更近一步的了解當地的人文;還有我國目前正在施工與測 試的高捷,以及已經營運的高鐵,皆讓往來人口運輸便捷許多。 交通運輸系統,在台灣已大致成熟,陸地上的運輸也呈現了現代化的風貌, 它屬於積極性的投資,能反映出我國對提升技術層面及持續經濟發展的重心;長 程運輸方面以高速鐵路為主,中短程運輸則為一般的傳統鐵路,都會區的運輸則 靠捷運,也就是說,融合了高速鐵路、傳統鐵路與捷運,接駁大量人潮。捷運車 輛的優點在於污染性低、節省能源、載客量多,因此,提高捷運車輛的技術水準、 運營時效、縮短等車時間、緩解都市交通阻塞等,皆是各國致力發展的目標,但 在發展同時,對於捷運車輛的要求也日亦增加,有關捷運車輛的設計,多朝安全、 快速、可靠、舒適等多方面研究,雖然現今的捷運車輛已具有良好的穩定性與舒 適性,但精益求精下,追求更優良的乘車品質仍是大家努力的目標,而在這些技 術突破之前,捷運車輛的動態特性研究、穩定性分析以及安全評估更是不容忽視。 以現今捷運的載客數來區分,有中運量電聯車和高運量電聯車兩種;中運量 電聯車乃採用膠輪電車,由電腦全自動操控列車,導軌導引方式運行,必要時可 採人工方式駕駛,以雙車為一組,兩組聯結,即四車的模式營運,最高時速 70 km/h; 而高運量電聯車係由二組車組所組成,每組三車,每一車組包括一節駕駛動力車 (DM1)、一節拖車(T)及一節調車動力車(M2),不論尖峰或離峰時段均以六車固定 編組方式營運,每車最高載客量為 370 人,最高時速為 80 km/h,而本研究欲模擬 的對象則以高運量電聯車為主。1-2 文獻回顧
過去,許多學者對軌道車輛作過各方面的探討,對本研究皆有相當的助益, 經過筆者的涉獵後,整理出相關之文獻如下: Hertz 的接觸力學理論中,提到當兩彈性體接觸時,兩接觸面為一橢圓[1]; Wickens 曾提出軌道車輛動力學的發展過程,Carter 曾依Hertz 的接觸力學理論, 提出輪軌間潛滑力(creep force)之觀念及車輪圓錐度(conicity)對軌道車輛的影響, 並且定義縱向及橫向潛滑率[2];Kalker 曾提出線性潛滑理論,說明縱向、橫向潛 滑力和自旋潛滑力矩,此觀念可廣泛地應用於模擬軌道車輛之橫向穩定度,以及 建立彎軌行駛時之彎軌作用力,但此理論只適用於小潛滑率之情況的線性接觸力 理論[3];Han 曾應用非線性接觸力探討軌道車輛在平直軌道行駛時之穩定性[4]; Hague and Lieh 曾應用線性接觸力理論和車輪圓錐度參數之非線性變化,求解臨界 速度的穩定邊界[5];Ahmedian and Yang 曾探討橫向懸吊系統的改變,對轉向架 臨界速度的影響[6];Richard 曾探討車輪圓錐度和車輛穩定性之關係[7];Delfosse 曾量測法國高速鐵路(TGV)轉向架穩定度、車輛舒適度、輪軌作用力等數據,並得到與模擬計算值相接近之結果[8];台北捷運局范揚材博士建立全車體的28個自由
度模型來模擬列車行駛的穩定度與舒適度以及輪緣磨平與行經轉撤器對列車的影 響[9];Chang 等人曾以軌道不平整為動態輸入,探討主懸吊系統勁度和阻尼係數 改變時,在時間域下線性系統和非線性系統響應的比較[10];Yang and AppaRao 曾 探討軌道車輛之橫向動態響應,並與實驗結果作一比較[11];Law and Cooperrider 曾對軌道車輛的動態響應做實際測量與研究[12];Zhai 等人曾提出車輪與軌道系 統的交互作用模式,並考慮車輪與軌道的側向交互作用力,建立偶合的垂直和側 向交互作用之模型,以分析車輛與軌道間之動態交互作用[13];李千運曾探討列車 與軌道系統之垂直振動,以分析系統振動動態反應[14];Bell 等人曾探討軌道車輛 行經曲線軌道時,曲率半徑、車輪圓錐度等幾何參數對臨界速度的影響[15,16]; Gilchrist and Brickle 曾探討潛滑力對出軌可能性之影響,並建議納入出軌的力學模 式[17];Cherchas 等人曾利用Nadal公式探討出軌可能性[18];Elkins and Carter 曾 比較北美、英國和歐洲各國對出軌性能的安全性評估[19];Miyamoto 曾歸納出三 種可能出軌的模式,並對出軌現象作完整的討論[20];張家豪曾探討轉向架之各個 參數對臨界速度及出軌係數之關係,及軌道車輛於曲線軌道行駛時之出軌行為與 穩定性[21];Steenbergen 曾探討單點和多點的輪軌接觸對軌道列車鋼輪衝擊力的 影響[22];Pombo 等人曾利用卡克線性化理論探討輪軌間的接觸情形,並模擬轉 向架與輪軸組的橫向位移和橫向力[23];陳水可曾運用拉格蘭吉的原理導出軌道車 輛的運動微分方程式,並藉由動態反應的分析,來研究軌道車輛線性與非線性的 動態行為[24]。 學術界裡,許多軌道車輛的研究是以車輛的製造技術和土木方面的軌道研究 為主,就軌道車輛本身的系統分析並不常見,或是建立的車輛模型太過簡易以致 無法完整的顯示出它的動態特性。本研究的目的,在於建立一個完整的捷運車輛 模型,考慮各種不同的行駛條件下,探討車輛本身的各種動態響應,並討論其特 性;首先我們建立一個28自由度的軌道車輛動態分析模型,並模擬列車行駛於平 面段時,所呈現的各種動態響應,研究內容包括懸吊系統的設計和鋼輪磨平的深 淺對軌道車輛本身有何影響,還有列車在高承載時,行駛於直軌與彎軌的動態響 應與安全評估,最後,針對台北捷運局規定捷運列車行駛時突遇四級地震,是否 必須停駛的這項措施做探討。
1-3 本報告架構
本報告總共分為八章: 第一章為導論,介紹軌道車輛之發展,相關文獻回顧和本研究的重點。 第二章為軌道車輛之建模分析,依多自由度系統動力學,先建立軌道車輛運 動模型,並導出各子系統和懸吊系統之受力關係式,而後考慮以軌道不平整為輸 入。 第三章為數值模擬與安全指標探討,針對模擬內容作一概述,包括動態響應 及安全評估,再針對模擬的軟體、方程式的降階與軌道不平整輸入作一介紹。 第四章為懸吊系統設計與車輛穩定度分析,探討列車的懸吊系統勁度係數強 弱,對捷運軌道車輛動態效應的影響,並探討列車在不同時速、不同軌道等級下 的穩定度,也介紹實車測試。 第五章為鋼輪磨平下捷運軌道車輛的各種動態效應,針對鋼輪磨平對軌道列 車衝擊力的影響,並考慮多項和衝擊力有關的因素,如軌道不平整、負重等,再 進行相關的模擬,並分析出軌比。第六章為高承載下捷運軌道車輛之安全評估,探討捷運在尖峰時刻,乘車人 數達最大數量370人下,不同過彎半徑對軌道車輛所造成的影響,並作安全評估, 另有在不同的軌道等級下,高承載列車所呈現的輪軸組橫向位移。 第七章為軌道車輛遇地震時之模擬探討,在軌道不平整輸入外,再加上四級 地震的輸入,探討捷運軌道車輛在正常行駛中,突然遭遇四級地震時所呈現的動 態響應與安全評估。 第八章為報告總結。
第二章 軌道車輛之建模分析
2-1 座標設定
捷運軌道車輛是由許多子系統所構成,子系統包括車身、轉向架、輪軸組等 等,若缺少任何一個子系統,則此車輛視為不完全。本章首先探討軌道車輛各子 系統間的受力關係式,並且考慮軌道不平整的輸入,模擬的對象為台北捷運局的 無動力客車廂,包括ㄧ個全車體(carboby)、二個無動力轉向架(conventional bogie) 和四組輪軸組(wheelset)。 在受力探討之前,須先建立座標系統,如圖 2-1 所示[9],定義行車方向為正, 圖中的 A 點、B 點和 C 點分別為車體、轉向架和輪軸組的質心,共有七個相對座 標系,每ㄧ個座標系的定義如圖 2-2 所示,以卡氏座標右手定則為基準, x 方向為 行車方向,y方向為橫向,z方向則為垂向,除此三個方向外,尚有繞 x 軸旋轉的滾動(rolling)、繞y軸旋轉的上下顛簸(pitching)和繞z軸旋轉的擺動(yawing),共有
六個自由度[25]。由於只探討車輛穩態行駛的狀況,不考慮縱向加速度,故 x 方向 的考量忽略不計,並且繞y軸旋轉的上下顛簸也不列入考慮,因此七個座標系各考 慮四個自由度,共有二十八個自由度,各自由度代表的變數如表 2-1 所示。
2-2 輪軸組受力關係式
在座標系統設定後,接著探討軌道車輛各子系統的受力關係式,本節首先考 慮輪軸組。輪軸組包含了一根鋼軸和兩個鋼輪,鋼輪直接與鋼軌接觸,材料的選 用與設計須配合車輛及軌道的特性,才能表現出優良的運轉品質、節省維修費用; 車軸方面,為了避免車軸的疲勞破壞,須儘量減少形狀上的局部不連續性,即降 低應力集中的機會,而在高速運轉時,負荷溫度及可靠度上,皆要有嚴格的規定 與限制。 軌道列車在模擬直軌行駛時,因鋼輪輪緣不會和軌道面接觸,所以不考慮輪 緣接觸力,而在模擬彎軌時,則將之列入計算,我們首先探討軌道車輛在直軌段 穩態行駛之受力情形,以建立運動方程式[26]。 輪軸組的受力和力矩內容如下,其中下標1代表1號輪軸組,下標2代表2號輪 軸組,下標3代表3號輪軸組,下標4代表4號輪軸組: A. 作用於質心處的四組輪軸組質量 1 w m 、m 、w2 m 、w3 mw4(本研究所模擬的模型假設四組輪軸組質量相同)。 B. 左右主懸吊系統的力與力矩,四組輪軸組的四個自由度各分別為 1 lpwy F 、Frpwy1、Flpwz1、Frpwz1、Mlpwx1、Mrpwx1、Mlpwz1、Mrpwz1、 F 、F 、F 、F 、M 、M 、M 、M 、3 lpwy F 、Frpwy3、Flpwz3、Frpwz3、Mlpwx3、Mrpwx3、Mlpwz3、Mrpwz3、 4 lpwy F 、Frpwy4、Flpwz4、Frpwz4、Mlpwx4、Mrpwx4、Mlpwz4、Mrpwz4。 下標英文符號中,l代表左邊,p代表主懸吊系統, w 代表輪軸組。 C. 軌道不平整 1 liy
F
、
Friy1、
Fliz1、
Friz1、Fliy2、
Friy2、
Fliz2、
Friz2、3
liy
F
、
Friy3、
Fliz3、
Friz3、Fliy4、
Friy4、
Fliz4、
Friz4。
D. 輪軌接觸點的正向力 1 l N 、N 、r1 N 、l2 N 、r2 N 、l3 N 、r3 N 、l4 N 。r4 E. 潛滑力與潛滑力矩 lcy F 、Frcy、Mlcx、Mrcx、Mlcz、Mrcz(四組輪軸組設為相同)。 F. 輪緣接觸力 lfy F 、Frfy、Flfz、Frfz(直軌模型不討論,四組輪軸組視為相同)。 G. 前後轉向架的一半重量和車體的四分之ㄧ重量 1 2 1 B m 、 2 2 1 B m 、 mc 4 1 。 四組輪軸組的自由體圖如圖2-3 ~圖2-6所示,行駛方向為圖中的 x 軸方向,而y軸 和z軸方向則依卡氏右手定則來定義,綜合以上的力與力矩,所導出四組輪軸組質 心處的力與力矩平衡方程式如下(r 代表鋼輪滾動半徑,a 代表二分之ㄧ軌距,V0 代 表列車行駛速度): 第一輪軸組: 1. y橫向(lateral): rfy lfy riy liy rcy lcy rpwy lpwy w w y F F F F F F F F m 11 1 1 1 1 (2-1) 2. z垂直向(vertical): rfz lfz riz liz r l rpwz lpwz w w z F F N N F F F F m 11 1 1 1 1 1 1 (2-2) 3. 滾動向(roll):
1 1 1 1
1 1 1 0 1 1 1 w w w lpwx rpwx lcx rcx liz riz l r w M M M M a F F N N r V I I y x (2-3) 4. 擺動向(yaw):
riy liy rcy lcy
w rcz lcz rpwz lpwz w w w w M M M M a F F F F r V I I z y 1 1 1 1 1 1 0 1 1 1 (2-4)I 分別為繞其下標所指第一輪軸組之轉動慣量。 第二輪軸組: 1. y橫向(lateral): rfy lfy riy liy rcy lcy rpwy lpwy w w y F F F F F F F F m 22 2 2 2 2 (2-5) 2. z垂直向(vertical): rfz lfz riz liz r l rpwz lpwz w w z F F N N F F F F m 22 2 2 2 2 2 2 (2-6) 3. 滾動向(roll):
2 2 2 2
2 2 2 0 2 2 2 w w w lpwx rpwx lcx rcx liz riz l r w M M M M a F F N N r V I I y x (2-7) 4. 擺動向(yaw):
riy liy rcy lcy
w rcz lcz rpwz lpwz w w w w M M M M a F F F F r V I I y z 2 2 2 2 2 2 0 2 2 2 (2-8) I 分別為繞其下標所指第二輪軸組各座標軸之轉動慣量。 第三輪軸組: 1. y橫向(lateral): rfy lfy riy liy rcy lcy rpwy lpwy w w y F F F F F F F F m 33 3 3 3 3 (2-9) 2. z垂直向(vertical): rfz lfz riz liz r l rpwz lpwz w w z F F N N F F F F m 33 3 3 3 3 3 3 (2-10) 3. 滾動向(roll):
3 3 3 3
3 3 3 0 3 3 3 w w w lpwx rpwx lcx rcx liz riz l r w M M M M a F F N N r V I I y x (2-11) 4. 擺動向(yaw):
riy liy rcy lcy
w rcz lcz rpwz lpwz w w w w M M M M a F F F F r V I I y z 3 3 3 3 3 3 0 3 3 3 (2-12) I 分別為繞其下標所指第三輪軸組各座標軸之轉動慣量。 第四輪軸組: 1. y橫向(lateral): rfy lfy riy liy rcy lcy rpwy lpwy w w y F F F F F F F F m 44 4 4 4 4 (2-13) 2. z垂直向(vertical): rfz lfz riz liz r l rpwz lpwz w w z F F N N F F F F m 44 4 4 4 4 4 4 (2-14) 3. 滾動向(roll):
4 4 4 4
4 4 4 0 4 4 4 w w w lpwx rpwx lcx rcx liz riz l r w M M M M a F F N N r V I I y x (2-15) 4. 擺動向(yaw):
riy liy rcy lcy
w rcz lcz rpwz lpwz w w w w M M M M a F F F F r V I I y z 4 4 4 4 4 4 0 4 4 4 (2-16) I 分別為繞其下標所指第四輪軸組各座標軸之轉動慣量。
2-3 轉向架受力關係式
轉向架為捷運軌道車輛高速行駛之關鍵設備,它提供列車之主要支撐及穩 定,是一種車身承載裝置,在舒適性及穩定性方面,轉向架更居於重要地位。轉 向架有各種不同型式,以車軸數來區分的話,有單軸、二軸及三軸轉向架三種型 式;而若要考慮軸重的限制及達到列車的最佳過彎性能,二軸轉向架為最佳的選 擇;若以車種來區分時,則有客車轉向架及動力車轉向架兩種,此兩種轉向架的 差別在於動力車轉向架有牽引馬達與相關之配備,而客車轉向架則有較多的減震 系統,轉向架框架大部分是由鋼鈑焊接而成,以外觀而言,通常有 H 形及日字形 二種[27]。 轉向架的受力和力矩內容如下,其中下標 1 代表前轉向架,下標 2 代表後轉 向架: A. 作用於質心處的二組轉向架質量 1 B m 、m (本研究所模擬的二組轉向架質量設為相同)。B2 B. 左右主懸吊系統的反作用力和反作用力矩。 C. 次懸吊系統的力和力矩,二組轉向架的四個自由度分別為 1 lsBy F 、FrsBy1、FlsBz1、FrsBz1、MlsBx1、MrsBx1、MlsBz1、MrsBz1、 2 lsBy F 、FrsBy2、FlsBz2、FrsBz2、MlsBx2、MrsBx2、MlsBz2、MrsBz2。 D. 車體重量的一半, mc 2 1 。 其前後二組轉向架的自由體圖如圖 2-7、圖 2-8 所示,行駛方向為圖中的 x 軸方向, 而y軸和z軸方向則依卡氏右手定則來定義,綜合以上的力與力矩,導出前後轉向 架質心處的平衡方程式如下: 前轉向架: 1. y橫向(lateral): 2 2 1 1 1 1 11 B lsBy rsBy lpwy rpwy lpwy rpwy
B y F F F F F F m (2-17) 2. z垂直向(vertical): 2 2 1 1 1 1 1 1 B lsBz rsBz lpwz rpwz lpwz rpwz B z F F F F F F m (2-18)
3. 滾動向(roll): 2 2 1 1 1 1 1 1 B lsBx rsBx lpwx rpwx lpwx rpwx B M M M M M M I X (2-19) 4. 擺動向(yaw): 2 2 1 1 1 1 1 1 B lsBz rsBz lpwz rpwz lpwz rpwz B M M M M M M I z (2-20) I 分別為繞其下標所指前轉向架各座標軸之轉動慣量。 後轉向架: 1. y橫向(lateral): 4 4 3 3 2 2 2
2 B lsBy rsBy lpwy rpwy lpwy rpwy
B y F F F F F F m (2-21) 2. z垂直向(vertical): 4 4 3 3 2 2 2 2 B lsBz rsBz lpwz rpwz lpwz rpwz B z F F F F F F m (2-22) 3. 滾動向(roll): 4 4 3 3 2 2 2 2 B lsBx rsBx lpwx rpwx lpwx rpwx B M M M M M M I X (2-23) 4. 擺動向(yaw): 4 4 3 3 2 2 2 2 B lsBz rsBz lpwz rpwz lpwz rpwz B M M M M M M I z (2-24) I 分別為繞其下標所指後轉向架各座標軸之轉動慣量。
2-4 車體受力關係式
軌道車輛的車體結構為車上所有的設備及旅客之載重提供支撐,與轉向架及 聯結器連接。車體結構包含了車頂、車底架、車體側面及車端,主要結構連接處 利用鎖緊螺栓(Huck lock bolts)連接,特性為高強度、簡易、安裝快速、抗震與牢 固等優點。 車體的受力和力矩內容如下: A. 作用於質心的車體質量m 。c B. 左右次懸吊系統的反作用力和反作用力矩。 其車體的自由體圖如圖2-9所示,行駛方向為圖中的 x 軸方向,而y軸和z軸方向則 依卡氏右手定則來定義,綜合以上的力與力矩,導出車體質心處的力與力矩平衡 方程式如下: 1. y橫向(lateral): rsBy lsBy c cy F F m (2-25)2. z垂直向(vertical): rsBz lsBz c zz F F m (2-26) 3. 滾動向(roll): rsBx lsBx c c M M I x (2-27) 4. 擺動向(yaw): rsBz lsBz c c M M I z (2-28) I 分別為繞其下標所指車體各座標軸之轉動慣量。
2-5 懸吊系統平衡關係式
捷運軌道車輛的懸吊系統有主懸吊系統和次懸吊系統兩種,除了支撐車身的 重量外,還有降低行駛時的振動,以及提高車輛行駛的操控性能等功用。主懸吊 系統共有四組,為第一、第二、第三和第四主懸吊系統,分別和下方的四個輪軸 組連接,用的是錐形彈簧,吸收因軌道不平整而造成的振動;次懸吊系統則有兩 組,為前次懸吊系統和後次懸吊系統,分別連接前後轉向架與車身,用的是空氣 彈簧,藉由自動控制充氣放氣,來吸收轉向架於行駛時的振動,也可在左右重量 不平均時,平衡車身。 我們將模擬的懸吊系統簡化,視為一組彈簧和阻尼,並將左右的勁度係數和 阻尼係數設為相同,主懸吊系統的縱向、橫向和垂向阻尼係數分別為為Cpx、Cpy、 pz C ,勁度係數為Kpx、Kpy、Kpz,而次懸吊系統縱向、橫向和垂向阻尼係數則為 sx C 、Csy、C ,勁度係數為sz K 、sx Ksy、K ,所導出的懸吊系統關係式如下:sz 第一主懸吊系統: 1. y橫向(lateral):
1 1 1 1
1 1 1 1
1 1 rpwy 2 py w B B B B B 2 py w B B B B B lpwy F K y y l h C y y l h F (2-29) 2. z垂直向(vertical):
1 1
1 1
1 1 rpwz 2 pz B w 2 pz B w lpwz F K z z C z z F (2-30) 3. 滾動向(roll):
1 1
1 1
1 1 rpwx 2 pz w w w B B 2 pz w w w B B lpwx M K d d d C d d d M (2-31) 4. 擺動向(yaw):
1 1
2 1 1 2 1 1 rpwz 2 w px w B 2 w px w B lpwz M d K d C M (2-32)式子中,2lB代表第一、第二輪軸組或第三、第四輪軸組之間的質心距離,h 代表B 轉向架質心到主懸吊系統質心的垂直距離,2dB代表左右兩垂向主懸吊質心的距 離、2dw代表左右兩橫向主懸吊系統質心的距離。 第二主懸吊系統: 1. y橫向(lateral):
2 1 1 1
2 1 1 1
2 2 rpwy 2 py w B B B B B 2 py w B B B B B lpwy F K y y l h C y y l h F (2-33) 2. z垂直向(vertical):
1 2
1 2
2 2 rpwz 2 pz B w 2 pz B w lpwz F K z z C z z F (2-34) 3. 滾動向(roll):
2 1
2 1
2 2 rpwx 2 pz w w w B B 2 pz w w w B B lpwx M K d d d C d d d M (2-35) 4. 擺動向(yaw):
2 1
2 1 2 2 2 2 rpwz 2 w px w B 2 w px w B lpwz M d K d C M (2-36) 第三主懸吊系統: 1. y橫向(lateral):
3 2 2 2
3 2 2 2
3 3 rpwy 2 py w B B B B B 2 py w B B B B B lpwy F K y y l h C y y l h F (2-37) 2. z垂直向(vertical):
2 3
2 3
3 3 rpwz 2 pz B w 2 pz B w lpwz F K z z C z z F (2-38) 3. 滾動向(roll):
3 2
3 2
3 3 rpwx 2 pz w w w B B 2 pz w w w B B lpwx M K d d d C d d d M (2-39) 4. 擺動向(yaw):
3 2
2 2 3 2 3 3 rpwz 2 w px w B 2 w px w B lpwz M d K d C M (2-40) 第四主懸吊系統: 1. y橫向(lateral):
4 2 2 2
4 2 2 2
4 4 rpwy 2 py w B B B B B 2 py w B B B B B lpwy F K y y l h C y y l h F (2-41) 2. z垂直向(vertical):
2 4
2 4
4 4 rpwz 2 pz B w 2 pz B w lpwz F K z z C z z F (2-42) 3. 滾動向(roll):
2
2K d d d C d d d M M (2-43)4. 擺動向(yaw):
4 2
2 2 4 2 4 4 rpwz 2 w px w B 2 w px w B lpwz M d K d C M (2-44) 前次懸吊系統: 1. y橫向(lateral):
1 1
1 1
1 1 rsBy 2 sy c B cs c cs c Bs B 2 sy c B cs c cs c Bs B lsBy F K y y h l h C y y h l h F (2-45) 2. z垂直向(vertical):
1
1
1 1 rsBz 2 sz c B 2 sz c B lsBz F K z z C z z F (2-46) 3. 滾動向(roll):
) ( 2 2 1 1 1 1 c cs sy c cs sy B sy B sy c cs sy c cs sy c sy c sy Bs c cs sz c cs sz Bs rsBx lsBx l C l K y C y K h C h K y C y K h d C d K d M M (2-47) 4. 擺動向(yaw):
1 1
2 1 1 rsBz 2 Bs sx B sx B lsBz M d K C M (2-48) 式子中,l 代表轉向架質心到車體質心的水平距離,cs h 代表車體質心到次懸吊系cs 統質心的垂直距離,h 代表轉向架質心到次懸吊系統質心的垂直距離,Bs 2dcs代表 左右兩橫向次懸吊系統質心的距離,2dBs代表左右兩垂向次懸吊系統質心的距離。 後次懸吊系統: 1. y橫向(lateral):
2 2
2 2
2 2 rsBy 2 sy c B cs c cs c Bs B 2 sy c B cs c cs c Bs B lsBy F K y y h l h C y y h l h F (2-49) 2. z垂直向(vertical):
2
2
2 2 rsBz 2 sz c B 2 sz c B lsBz F K z z C z z F (2-50) 3. 滾動向(roll):
) ( 2 2 2 2 2 2 c cs sy c cs sy B sy B sy c cs sy c cs sy c sy c sy Bs c cs sz c cs sz Bs rsBx lsBx l C l K y C y K h C h K y C y K h d C d K d M M (2-51) 4. 擺動向(yaw):
2 2
2 2 2 rsBz 2 Bs sx B sx B lsBz M d K C M (2-52)2-6 潛滑力
輪軌之間的交互作用力影響著軌道車輛的動態特性,軌道車輛於行駛時,鋼 輪和鋼軌是為兩剛性體,而在此兩剛性體的接觸面,切線方向上的接觸力,我們 稱為潛滑力。有關潛滑力,鋼輪或軌道的材料性質扮演著重要的角色,兩剛體間 的接觸面積也是影響的關鍵要素,根據 Hertz 的接觸理論[1],輪軌接觸面是呈橢 圓分布,如圖 2-10 所示,而 Carter 是第一位將潛滑力的觀念應用在輪軌接觸的人,他定義的縱向潛滑率(Longitudinal creepage) 、橫向潛滑率(Lateral creepage)x 和y
自旋潛滑率(Spin creepage) 如下:sp rolling to due velocity forward velocity forward rolling pure velocity forward actual x (2-53) rolling to due velocity forward velocity lateral rolling pure velocity lateral actual y (2-54) velocity rolling al min no body lower of velocity angular body upper of velocity angular sp (2-55) 縱向潛滑率和橫向潛滑率並無單位,自旋潛滑率的單位為[L-1 ],潛滑率的分母為純 滾動前進速度,分子為行駛速度與輪軸轉速差,亦即各種潛滑率與各子系統所設 座標系質心的行駛速度或者角速度有關。另一個和潛滑力有關的參數為潛滑係 數,與材料的性質與接觸面積有關,本模型將它簡化為定值,其代表意義如下: 11
f : lateral creep force coefficient
12
f : lateral/spin creep force coefficient
22
f : spin creep force coefficient
33
f : longitudinal creep force coefficient
將上述潛滑率和潛滑係數相乘即為潛滑力和潛滑力矩[22]。
![圖 3-1 高低不整與方向不整示意圖[25]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8840647.238776/59.892.136.760.132.448/圖31高低不整與方向不整示意圖25.webp)
![圖 3-7 輪軌接觸受力示意圖[28]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8840647.238776/62.892.187.704.140.611/圖37輪軌接觸受力示意圖28.webp)