國
立
交
通
大
學
土木工程學系
碩
士
論
文
軟岩河床遷急點倒退率模式發展與參數率定
Development and Parameter Calibration of a Knickpoint Retreat
Rate Model for Soft Rock Riverbed
研 究 生:徐婉容
指導教授:潘以文 博士
軟岩河床遷急點倒退率模式發展與參數率定
Development and Parameter Calibration of a Knickpoint Retreat Rate
Model for Soft Rock Riverbed
研 究 生:徐婉容 Student:Wan-Rong Syu 指導教授:潘以文 博士 Advisor:Dr. Yii-Wen Pan
國 立 交 通 大 學 土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
July 2013
Hsinchu, Taiwan, Republic of China
軟岩河床遷急點倒退率模式發展與參數率定
學生:徐婉容 指導教授:潘以文 博士 國立交通大學土木工程學系碩士班 中文摘要 1999 年時由於車籠埔斷層活動引發集集大地震。在斷層上盤隆起造成 台灣中西部之部分河道抬升,抬升之河道在地震後開始發生遷急點倒退情 形。遷急點倒退往往加速河道的下切作用,造成跨河構造物毀損,然而目 前仍缺乏有合適的模式詮釋國內軟岩河床上遷急點倒退之速率與歷程。本 研究先使用歷年航照資料進行多時期之地形重建,基於歷史地形及影像資 料分析、詮釋河道之變遷。大安溪自集集地震以來出現遷急點倒退,河道 急速下切,直到 2010 年地形方才重新達到平衡狀態;大甲溪埤豐橋上游受 到人為影響在 2008 年遷急點消失,但因為暴雨及設置中央排水道在河道順 層處又出現新的遷急點;大里溪則是在震後便進行整治,因此未受到地震 造成河道抬升影響;頭汴坑溪在近年影像可觀測到一江橋下游流況較不穩 定,但是在震後無法確認河道抬升情況,無法肯定與九二一地震之相關性; 乾溪則可觀測到遷急點倒退,但是並未確認倒退終止的時間。此外,本研 究針對和弦搜尋演算法進行適度改良,在演算過程中強制新的和弦必須與 和弦記憶不完全相同,並加入參數自由設定及粒子群法的概念,將改良後之和弦搜尋演算法在連續問題進行驗證分析後用於後續之模式參數率定。 本研究接著基於觀測結果,擷取影響遷急點倒退相關之主要因子,包含河 道坡度、抗沖蝕指數、河道落差、河道寬度及流量等,先透過定性分析發 現,上述因子與遷急點倒退速率有強烈之相關性,再採用上述因子建立遷 急點倒退模式,並藉由前述改良後之和弦搜尋演算法標定模式參數。經比 較模式計算值與實際發生之遷急點倒退情況,本研究所提出之模式可大致 描述國內軟岩河床上遷急點倒退之速率與歷程,應可作為後續進行遷急點 相關研究之參考。 關鍵字:遷急點倒退、河道變遷、岩質河床沖蝕、和弦搜尋演算法、地形 重建
Development and Parameter Calibration of a Knickpoint Retreat Rate
Model for Soft Rock Riverbed
Student:Wan-Rong Syu Advisor:Dr. Yii-Wen Pan Department of Civil Engineering
National Chaio Tung University
英文摘要
ABSTRACT
The rupture of the Chelungpu Fault in September 1999 resulted in some local riverbed uplift across a few rivers in the central western region of Taiwan; the local riverbed uplift created knickpoints on the river channels. The
sudden presence of a knickpoints tends to retreat quickly so that accelerates the riverbed incision and endangers the structures crossing the river. Yet, there is no suitable model for describing the rapid knickpoint retreat rate (KPR rate) in soft rock riverbed in Taiwan. The first step of this thesis was terrain
reconstruction and analysis: the tasks were to reconstruct digital surface model (DSM) from chronological aerial photographs and to analyze the
geomorphology changes of river-channel from multi-year DSMs and images. The evolutions of river channels of several target rivers (namely, the Daan River, the Dajia River, the Toubiankeng river, the Dali River and the Gan River) were carefully examined; the relevant geomorphology data were then retrieved. Next, this study proposed a KPR-rate model by taking the major factors affecting KPR rate into account; these factors include slope, erodibility index, fall height, channel width and discharge. The study made use of an improved
harmony search algorithm (HS) to calibrate the model parameters. The
improvement of the original HS method was attempted with various schemes: including parameter-setting-free harmony search (PSF-HS), particle-swarm harmony search”(PS-HS) and limiting duplicate harmony memory. The
improved HS method was tested and examined, then was used for the calibration of model parameters. Compared with the actual KPR data, it appears the
proposed model is able to quantitatively describe the progressive knickpoints recession for soft rock riverbed in central western region of Taiwan.
Key words: Knickpoint retreat; Channel evolution; Rock riverbed erosion; Harmony search; Terrain reconstruction
誌謝
終於走到這一步,回首過去兩年來的點滴,歡笑與淚水交織的樂章不 絕於耳。 感謝指導教授潘以文老師的悉心教導與鞭策,以及在 meeting 時給予需 多建議與方向的廖志中老師,兩年來受到兩位老師諸多指導與督促,得以 如期畢業,在此向兩位老師致上十萬分的謝意。 在此也必須感謝四位口試委員李德河老師、陳春宏老師、田永銘老師 與黃燦輝老師,老師們給予許多寶貴的意見並仔細的檢查論文內容與細節, 使我的論文可以順利完成,在此向四位委員致上十萬分的謝意。 在交大求學的日子裡,感謝方永壽老師、林志平老師、單信瑜老師以 及黃安斌老師傾囊相授的教學,在課堂上習得許多的知識。 接下來感謝潘廖大家庭的明萬學長、慧蓉學姐與貓脖學長,尤其在研 究初期,時常找明萬學長討論,謝謝學長不厭其煩的給予我許多意見。還 有給予我許多鼓勵的阿康學姐,以及教導我野外調查知識的楚鈞學長,與 我一起做了室內大安溪調查,檢核了數十筆大安溪現地調查資料及照片。 感謝名單絕對少不了麵包學長,一開始光想到演算法是什麼就感到恐 懼,但是由於學長留下來的資料及註解,使得在演算法的編寫上得以順利 進行,在此致上謝意。當然還有同實驗室的暉凱、王靖、阿村、包包還有歐阿,以及交大大 地組的同學們,謝謝你們讓我這兩年過得多采多姿。 還有雖然住在一起,但是不常見面的海倫,以及遠在美國,但是網路 無國界的拉拉,謝謝你們聽我吐苦水,當彼此的垃圾桶。 還要感謝親愛的學弟們,小短、俊廷、咪咪、阿宅、孝存、宥達、耕 白、阿啾和 Marco,口試的時候幫忙接待委員,並給予了許多的協助,真的 十分感謝。 此外還要感謝防災的助理們,特別是佳廷小姐,沒有你們的幫忙與照 顧,大概連生活都成問題,非常感謝你們。 以及雖然身在軍營還要被聽我碎碎念的妮翁,雖然不在身邊還是給我 許多的支持,謝謝你。 最後要感謝我的家人,體諒我為了進行研究沒有時常陪在他們的身邊, 並在背後默默給予我支持,讓我無後顧之憂的全力衝刺,對家人的感激之 情溢於言表。 謝謝所有在我求學的路途中給予協助的大家,將這本論文獻給愛我的 人以及我愛的人。
目錄
中文摘要 ... I 英文摘要 ... III 誌謝 ... V 目錄 ... VII 圖目錄 ... XI 表目錄 ... XVI 1 第一章 緒論 ... 1 1.1 研究動機與目的 ... 1 1.2 研究流程 ... 2 1.3 論文內容 ... 6 2 第二章 文獻回顧 ... 7 2.1 遷急點倒退模型建構 ... 7 2.1.1 遷急點概述 ... 7 2.1.2 遷急點倒退相關因子 ... 8 2.1.3 遷急點倒退模型 ... 14 2.2 工程最佳化演算法 ... 19 2.2.1 工程最佳化演算法 ... 192.2.2 啟發式最佳化演算法 ... 25 2.2.3 和弦搜尋演算法之改良 ... 38 2.3 航空攝影測量 ... 42 2.3.1 航空攝影測量基本作業方式 ... 42 2.3.2 物空間坐標系統與像坐標系統之關係 ... 44 2.3.3 空中三角測量 ... 48 2.3.4 數值地形模型 ... 48 2.3.5 正射影像 ... 50 2.4 小結 ... 51 3 第三章 研究方法與規劃 ... 52 3.1 遷急點倒退模型建構及規劃 ... 52 3.1.1 遷急點倒退相關因子 ... 52 3.1.2 遷急點倒退模型建構及參數率定規劃 ... 53 3.2 研究案例背景 ... 55 3.2.1 九二一地震引致之河道隆起 ... 56 3.2.2 研究案例背景 ... 58 3.3 模型因子選定 ... 63 3.3.1 地文因子 ... 63 3.3.2 流量因子 ... 68
3.3.3 河床抗沖蝕因子 ... 80 3.4 電腦輔助程式及最佳化方法之選擇 ... 82 3.4.1 MATLAB 計算軟體 ... 82 3.4.2 最佳化演算法之選擇 ... 82 3.5 最佳化演算法擬定流程 ... 83 3.5.1 最佳化演算法修改 ... 83 3.5.2 連續問題驗證規劃 ... 86 4. 第四章 研究河段地形演變分析 ... 87 4.1 大安溪 ... 87 4.1.1 影像判釋 ... 88 4.1.2 地形演變分析 ... 91 4.2 大甲溪 ... 95 4.2.1 影像判釋 ... 96 4.2.2 地形演變分析 ... 102 4.3 大里溪 ... 104 4.3.1 大里溪 ... 104 4.3.2 頭汴坑溪 ... 112 4.3.3 乾溪 ... 116 4.4 因子整理 ... 118
5 第五章 最佳化方法之驗證 ... 121 5.1 連續問題驗證 ... 121 5.1.1 OHS 與 HS-dup 之比較 ... 121 5.1.2 改良版和弦搜尋法加入和弦重複限制與否之比較 ... 127 5.2 可靠度分析 ... 129 5.3 小結 ... 131 6 第六章 遷急點倒退模型率定 ... 133 6.1 因子定性分析 ... 133 6.2 HS 演算法之參數設定 ... 136 6.3 率定結果與討論 ... 137 6.4 小結 ... 148 7 第七章 結論與建議 ... 149 7.1 結論 ... 149 7.2 建議 ... 153 8 參考文獻 ... 154 9 附錄一 ... 160
圖目錄
圖 1.1 大甲溪埤豐橋正射影像(1999/9/22 航照) ... 1 圖 1.2 大安溪 2003 年至 2005 年河道縱剖面 ... 2 圖 1.3 研究流程圖 ... 5 圖 2.1 遷急點倒退示意圖(Hayakawa,2003) ... 8 圖 2.2 遷急點倒退相關因子 ... 9 圖 2.3 水流越頂示意圖(Annandale,2006) ... 11 圖 2.4 遷急點坡度變化處沖蝕示意圖(Annandale,2006) ... 12 圖 2.5 能量消耗 v.s.沖蝕指數雙對數關係圖(Annandale,1995) ... 13 圖 2.6 遷急點倒退速率 v.s. FR 指數關係圖(Hayakawa 和 Matsukura,2003) ... 16 圖 2.7 遷急點倒退速率 v.s. FR 指數關係圖(Hayakawa 等人,2009) .... 18 圖 2.8 工程最佳化演算法(改繪自 Reklaitis 等人,1983) ... 20 圖 2.9 最佳化問題分類表(改繪自 Yang,2010) ... 21 圖 2.10 螞蟻族群演算法示意圖 ... 29圖 2.11 HS 模擬與設計變數對照圖(Lee & Geem,2005) ... 32
圖 2.12 隨機產生初始和弦記憶 ... 34
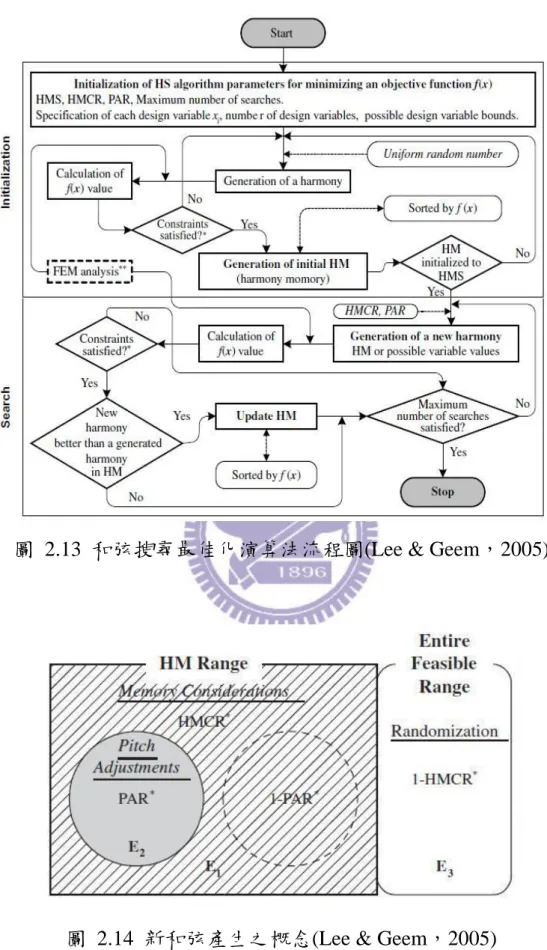
圖 2.13 和弦搜尋最佳化演算法流程圖(Lee & Geem,2005) ... 35
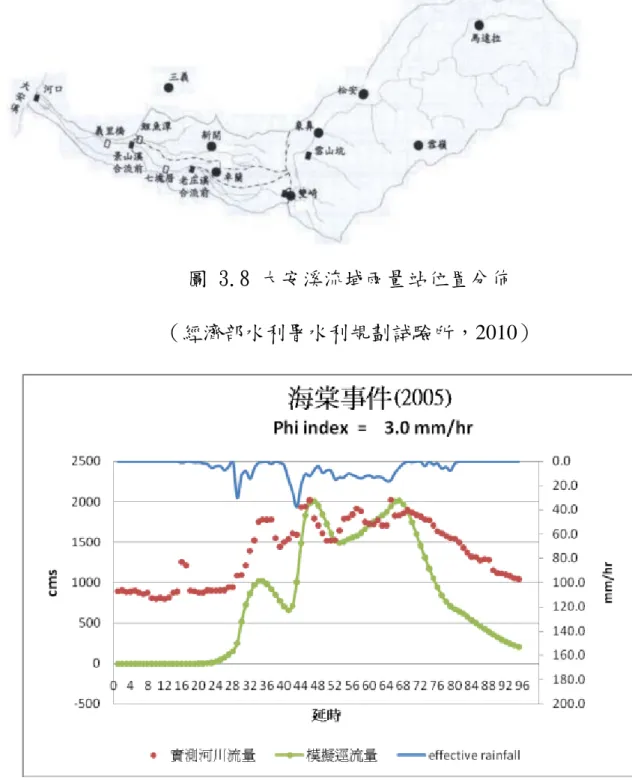
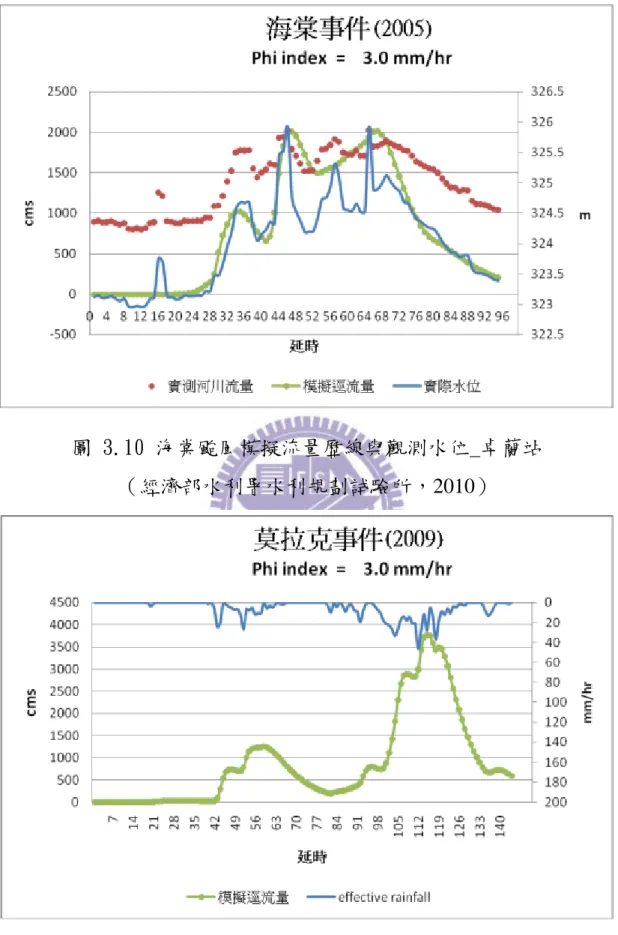
圖 2.15 Rehearsal 產生之記錄矩陣(Geem 等人,2009)... 40 圖 2.16 航空攝影測量作業流程圖 ... 42 圖 2.17 垂直攝影照片示意圖(修改自楊龍士等,2003)... 43 圖 2.18 垂直攝影示意圖(Arias,2005) ... 45 圖 2.19 正射投影及透視投影示意圖 ... 50 圖 3.1 車籠埔斷層地質圖—豐原以北(經濟部中央地質調查所,1999) 58 圖 3.2 大安溪 1999 年 9 月 21 日正射影像(Huang et al,2012) ... 59 圖 3.3 大安溪 1999~2010 年河道剖面(Huang et al,2012) ... 60 圖 3.4 大安溪歷年遷急點位置(Huang et al,2012) ... 60 圖 3.5 正射及地形資料的製作流程 ... 64 圖 3.6 2003 年 8 月 26 日大安溪遷急點剖面 ... 67 圖 3.7 卓蘭大橋洪颱水位觀測與水尺裝設 ... 71 圖 3.8 大安溪流域雨量站位置分佈 ... 74 圖 3.9 海棠颱風模擬流量歷線與實測流量、水位_卓蘭站 ... 74 圖 3.10 海棠颱風模擬流量歷線與觀測水位_卓蘭站 ... 75 圖 3.11 莫拉克颱風模擬流量歷線與降雨量_卓蘭站 ... 75 圖 3.12 莫拉克颱風模擬流量歷線與觀測水位_卓蘭站 ... 76 圖 3.13 各溪流與溪南橋水文站之關係圖 ... 78 圖 3.14 大安溪 2010 年 9 月 12 日之正射影像(Huang et al.,2012) ... 80
圖 3.15 XX’的地質剖面(Huang et al.,2012) ... 81 圖 3.16 本研究使用之和弦搜尋演算法計算流程 ... 85 圖 4.1 大安溪 1999 年 9 月 22 日正射影像 ... 89 圖 4.2 大安溪 2001 年 11 月 12 日正射影像 ... 89 圖 4.3 大安溪 2004 年 7 月 10 日正射影像 ... 90 圖 4.4 大安溪 2004 年 10 月 3 日正射影像 ... 90 圖 4.5 大安溪 2005 年 10 月 27 日正射影像 ... 90 圖 4.6 大安溪 2007 年 1 月 31 日正射影像 ... 91 圖 4.7 大安溪 2008 年 6 月 10 日正射影像 ... 91 圖 4.8 大安溪 1999 年 9 月 22 日地形 ... 92 圖 4.9 大安溪 2001 年 11 月 12 日地形 ... 92 圖 4.10 大安溪 2004 年 10 月 3 日地形 ... 93 圖 4.11 大安溪 2005 年 10 月 27 日地形 ... 93 圖 4.12 大安溪 2008 年 6 月 10 日地形 ... 93 圖 4.13 大安溪歷年河道剖面(Huang et al,2012) ... 95 圖 4.14 大甲溪 1999 年 9 月 22 日正射影像 ... 97 圖 4.15 大甲溪 2003 年 10 月 4 日航空照片 ... 98 圖 4.16 大甲溪 2004 年 7 月 10 日正射影像 ... 98 圖 4.17 大甲溪 2004 年 10 月 3 日航空照片 ... 99
圖 4.18 大甲溪 2005 年 11 月 20 日正射影像 ... 99 圖 4.19 大甲溪 2006 年 10 月 25 日正射影像 ... 100 圖 4.20 大甲溪 2008 年 11 月 28 日航空照片 ... 100 圖 4.21 大甲溪 2009 年 10 月 21 日正射影像 ... 101 圖 4.22 大甲溪遷急點倒退歷程(Hayakawa et al.,2012) ... 102 圖 4.23 大甲溪歷年河道剖面 ... 103 圖 4.24 大里溪 1999 年 9 月 22 日航空照片 ... 105 圖 4.25 大里溪 2000 年 10 月 7 日航空照片 ... 106 圖 4.26 大里溪 2003 年 7 月 10 日航空照片 ... 106 圖 4.27 大里溪 2004 年 7 月 13 日正射影像 ... 107 圖 4.28 大里溪遷急點倒退歷程(Hayakawa et al.,2012) ... 108 圖 4.29 大里溪 2005 年遷急點位置(Google Earth) ... 109 圖 4.30 大里溪 2003 年 7 月 10 日航照局部放大 ... 110 圖 4.31 大里溪 2004 年 7 月 13 日航照局部放大 ... 110 圖 4.32 大里溪 1999 年 9 月 22 日河道剖面 ... 111 圖 4.33 大里溪 2004 年 7 月 13 日河道剖面 ... 112 圖 4.34 頭汴坑溪 1999 年 9 月 22 日航空照片 ... 113 圖 4.35 頭汴坑溪 2001 年 5 月 23 日航空照片 ... 114 圖 4.36 頭汴坑溪 2003 年 7 月 10 日航空照片 ... 114
圖 4.37 頭汴坑溪 2004 年 7 月 13 日正射影像 ... 115 圖 4.38 頭汴坑溪 1999 年 9 月 22 日河道剖面 ... 115 圖 4.39 頭汴坑溪 2004 年 7 月 13 日河道剖面 ... 116 圖 4.40 乾溪 1999 年 9 月 22 日正射影像 ... 117 圖 4.41 乾溪 2004 年 7 月 13 日正射影像 ... 117 圖 4.42 乾溪歷年河道剖面 ... 118 圖 6.1 正規化因子迴歸結果(雙算數座標) ... 135 圖 6.2 正規化因子迴歸結果(雙對數座標) ... 135 圖 6.3 大安溪率定模型預測值與實際值比較圖 ... 139 圖 6.4 綜合資料模型預測值與實際值比較圖 ... 139 圖 6.5 大安溪率定模型預測值與實際值比較圖(三變數模型) ... 141 圖 6.6 大安溪率定結果三變數模型及四變數模型比較圖... 142 圖 6.7 採用大安溪資料率定之四變數模型參數預測大甲溪資料 ... 143 圖 6.8 採用大安溪資料率定之三變數模型參數預測大甲溪資料 ... 143 圖 6.9 本研究模型於 Hayakawa 模型之比較 ... 145 圖 6.10 有無坡度因子之模型採用大安溪資料迴歸結果... 147
表目錄
表 2.1 房總半島遷急點參數資料(修改自 Hayakawa 和 Matsukura,2003) ... 15 表 2.2 台灣地區參數目錄及估計結果(修改自 Hayakawa 等人,2009) 17 表 2.3 傳統與啟發式最佳化演算法之優、缺點比較 ... 24 表 2.4 Intensification 與 Diversification 之比較 ... 25表 2.5 Intensification 與 Diversification 之主控參數(Yang,2009) ... 37
表 2.6 常見最佳化方法適用性比較(Cheng 等人,2007) ... 37 表 3.1 斷層沿線流域及抬升高度(修改自盧泓佑,2012)... 57 表 3.2 製作正射及 DSM 所需基本資料 ... 65 表 3.3 各控制站流量與水位站觀測年份表 ... 69 表 3.4 卓蘭大橋莫拉克颱風期間水位觀測資料(經濟部水利署水利規劃試 驗所,2010) ... 72 表 3.5 本研究推估主要水文事件於卓蘭大橋洪峰流量表(經濟部水利署水 利規劃試驗所,2010) ... 77 表 3.6 流域面積資料 ... 79 表 3.7 大安溪河床各層之 Kh平均值 ... 81 表 4.1 大安溪資料時間及來源 ... 87 表 4.2 大甲溪資料時間及來源 ... 95
表 4.3 大里溪資料時間及來源 ... 104 表 4.4 頭汴坑溪資料時間及來源 ... 112 表 4.5 乾溪資料時間及來源 ... 116 表 4.6 本研究採用各個因子整理 ... 120 表 5.1 演算法參數及收斂條件設定 ... 122 表 5.2 測試 1-1,OHS 測試結果 ... 123 表 5.3 測試 1-1,HS-dup 測試結果 ... 123 表 5.4 測試 1-2,OHS 測試結果 ... 124 表 5.5 測試 1-2,HS-dup 測試結果 ... 124 表 5.6 測試 1-3,OHS 測試結果 ... 125 表 5.7 測試 1-3,HS-dup 測試結果 ... 125 表 5.8 測試 1-4,OHS 測試結果 ... 126 表 5.9 測試 1-4,HS-dup 測試結果 ... 126 表 5.10 演算法參數及收斂條件設定 ... 128 表 5.11 PSF-HS 修改一版測試結果(江長潤,2012) ... 128 表 5.12 PSF-HS 修改 1 版加和弦重複限制測試結果 ... 128 表 5.13 測試 1-2 及測試 1-4 可靠度分析結果 ... 129 表 5.14 加入和弦重複限制與否的可靠度分析結果 ... 130 表 5.15 測試 1-2 與 5.1.2 節測試之可靠度分析 ... 130
表 5.16 測試 1-2 與 5.1.2 節測試收斂失敗案例整理 ... 131
表 6.1 遷急點倒退模型各因子正規化結果 ... 134
表 6.2 演算法參數設定 ... 136
表 6.3 遷急點倒退模型率定結果 ... 138
1
第一章 緒論
1.1 研究動機與目的
台灣中部地區在 1999 年 9 月 21 日凌晨發生芮氏規模 7.3 強烈地震,震 央位於日月潭西方 12.5 公里,即南投縣集集鎮附近,震源深度 8 公里,此 地震是由於車籠埔斷層活動所引起。車籠埔斷層為一南北走向、向西逆衝 之斷層,斷層長度約一百公里,本次斷層活動造成上盤(東側)隆起一公 尺以下至八、九公尺不等,斷層活動範圍南至桶頭,北至豐原之後轉向東, 經過大甲溪流域的石岡東勢,並延伸至大安溪卓蘭內灣一帶。斷層沿線經 過之中央管河川有大安溪、大甲溪、烏溪及濁水溪等,上盤隆起造成部份 河道抬升,圖 1.1 為大甲溪埤豐橋,此處河道抬升約五公尺,河道坡度及 落差急遽變化,形成遷急點。 圖 1.1 大甲溪埤豐橋正射影像(1999/9/22 航照)根據地震過後歷年的影像資料顯示,部份河道上的遷急點有倒退情形 發生。圖 1.2 為大安溪 2003 年至 2005 的河道剖面,在上游側河道坡度及 落差變化不明顯,下游側坡度及落差急遽變化,河道下游即遷急點所在位 置,河道下切速率遠大於上游地區,顯示遷急點倒退會加速河道的下切作 用,此快速的下切作用有可能會造成跨河構造物毀損,例如水壩潰決或是 橋墩破壞等,進而對民眾的生命財產造成威脅,然而目前尚未有合適的模 型詮解釋國內遷急點倒退歷程。 圖 1.2 大安溪 2003 年至 2005 年河道縱剖面 由於以上理由,本研究目的為使用歷年航照資料進行地形重建,基於 歷史地形及影像資料觀察河道之變遷,進而建立遷急點倒退率模型,最後 藉由啟發式最佳化演算法標定模型參數,用以解釋自然及人文因素交互影 響下河道變化歷程。
1.2 研究流程
本研究主要目的有三部份,首先為蒐集研究地區歷年資料的以及重建 地形;其次是針對啟發式最佳化演算法的擬定及修改,以利於後續模型參數迴歸;接著則是建構遷急點倒退率模型,最後並使用啟發式最佳化演算 法進行模型參數率定。 研究流程第一步為文獻回顧,包含三個部份,首先為遷急點倒退相關 文獻的整理及探討,介紹並討論遷急點形成的因素及現有的倒退率模型, 由於現有模型無法合理解釋台灣地區遷急點倒退行為,因此需考慮不同型 態之模型;接著是整理與介紹工程最佳化方法以供研選模型參數率定之較 佳方法,依發展先後介紹傳統與啟發式演算法。由於傳統最佳化方法在應 用上存在許多限制且有求解上的缺陷,難以直接應用於實際問題,因此進 一步探討應用限制較少的啟發式演算法,由於本研究需考慮多時期之資料, 使用的數據量龐大,需要選用演算上較簡單且適用性高之演算法,採用和 弦搜尋演算法經修改後作為本研究所採用之最佳化演算法;又由於研究上 需要多時期的影像及地形資料,取得歷史航照雖然不難,但需要先進行校 正才能使用,故亦需參考航空測量相關之文獻,主要包涵影像校正,以及 利用航照進行地形數化兩部份。 本研究最終目的為建構遷急點倒退率模型並率定模型參數,然而前置 作業包含歷史資料蒐集與重建,以及最佳化演算法擬定與修改,此兩項工 作為同時進行,因此本研究分析與應用之流程可分為以下三個部份進行: 第一部份:歷史資料蒐集與重建 蒐集在九二一地震發生後有產生遷急點,且隨時間有倒退情形發生之
河川,重建該河道歷年之地形以獲取地文因子,藉由文獻或現地調查等方 式獲得水文及地質因子。 第二部份:最佳化演算法擬定與修改 基於和弦搜尋演算法,透過修改參數變動法則並結合其他演算法之優 點加以改進,最後對演算法之流程加入限制條件,將此修改後之演算法作 為後續標定模型之方法。由於本研究設定之遷急點倒退率模型率定屬於連 續問題,修改後之演算法則還需進行連續問題之驗證。 第三部份:建構遷急點倒退率模型並率定 基於影響遷急點倒退各因子與速率之正反比關係,建構遷急點倒退率 模型,代入研究地區實際量測資料,利用最佳化演算法進行模型參數率定。 最後探討藉由本研究模型迴歸之倒退率與實際倒退率之差異,瞭解此 模型之適用性以及遷急點因子之影響性,圖 1.3 為本研究之研究流程。
文獻回顧 最佳化演算法擬定及修改 遷急點案例資料蒐集 模型參數率定 結果與討論 連續問題驗證分析 歷年地形重建 現地資料調查 建立遷急點倒退模型 圖 1.3 研究流程圖
1.3 論文內容
本論文共分為七個章節,內容分別介紹如下: 第一章 緒論:說明本研究之動機與目的、研究流程和論文內容簡介。 第二章 文獻回顧:包含三種主題的文獻,首先介紹並討論遷急點形成 的因素及現有的倒退率模型;其次是最佳化演算法的沿革及相 關研究,並說明選定和弦搜尋法的理由;最後則對於航空攝影 測量相關文獻的整理。 第三章 研究方法與規劃:首先本研究之模型建構及率定方法;接著基 於模型因子,對本研究之案例背景及因子來源和使用方式做介 紹;最後則是最佳化方法的擬定和驗證規劃。 第四章 研究河段地形演變分析:本章節介紹各研究案例歷年的變化歷 程,以及因子的選取結果。 第五章 最佳化方法之驗證:探討修改後之和弦搜尋演算法應用於解析 解問題之結果。 第六章 遷急點倒退模型率定:本章為模型參數率定的結果與討論,並 探討各因子的影響性。 第七章 結論與建議2
第二章 文獻回顧
本研究之目的可分為模型建構及參數率定,因此在本章則分為參數率 定方法及模型建構兩部份文獻做討論。本章分為 4 節:2.1 節是遷急點的概 述,相關因子及過去的模型介紹;2.2 節介紹工程最佳化方法,包含概念及 最佳化方法的發展過程,最後介紹選定之方法及相關改良;2.3 節介紹航空 攝影測量相關之概念;2.4 節則為小結。2.1 遷急點倒退模型建構
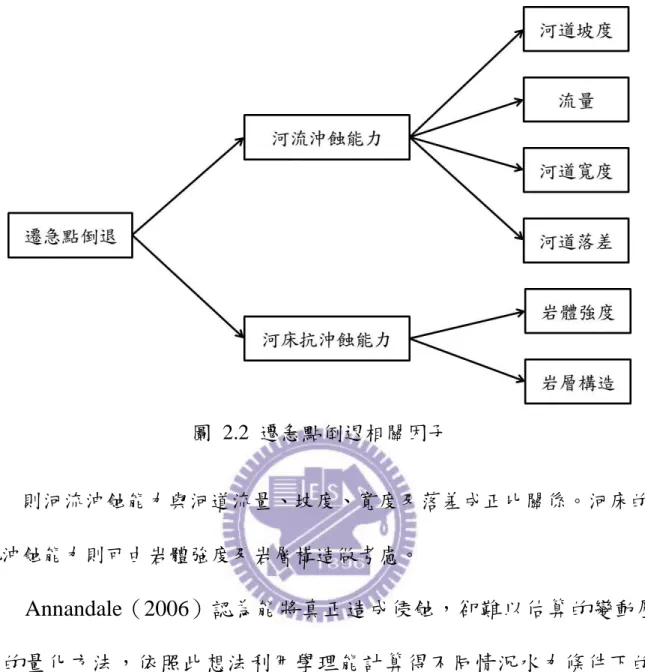
2.1.1 遷急點概述 遷急點(knickpoint)為河道縱剖面上一局部不連續的區域,因而造成 河道坡降不穩定。河道上遷急點的形成通常為侵蝕基準面突然改變或岩床 阻抗改變。侵蝕基準面改變的原因可能為氣候變化、海平面降低、地震造 成地表破裂等。 河道上遷急點受水流作用,遷急點附近陡峭處水流剪應力必然特別高, 則遷急點處會先發生沖蝕,因此常會有遷急點逐漸倒退(knickpoint migration)的現象,如圖 2.1。 常見的遷急點倒退量每年約數公釐至數公分,Hayakawa 和 Matsukura (2003)研究日本房總半島九個遷急點,每年的平均倒退量介於 0.0013~ 0.27 公尺之間,而美加交界之尼加拉瓜瀑布平均年倒退量為 1 公尺。然而 Huang 等人(2012)在台灣大安溪河道的資料顯示,年平均倒退量最大可達數百公尺,遠大於常見的倒退尺度,為探求差異來源,後續探討遷急點倒 退的相關因子。 圖 2.1 遷急點倒退示意圖(Hayakawa,2003) 2.1.2 遷急點倒退相關因子 遷急點倒退的發生原因,由河流沖蝕能力及河床抗沖蝕能力兩方面考 慮,則相關因子可簡單歸納如下圖 2.2 所示: W:深槽寬度 H:遷急點高度 D:遷急點倒退長度
圖 2.2 遷急點倒退相關因子
則河流沖蝕能力與河道流量、坡度、寬度及落差成正比關係。河床的 抗沖蝕能力則可由岩體強度及岩層構造做考慮。
Annandale(2006)認為能將真正造成侵蝕,卻難以估算的變動壓 力的量化方法,依照此想法利用學理能計算得不同情況水力條件下的 流功(stream power)計算公式,如自然明渠(Open channel)、水流越頂 (Hydraulic headcuts)、水流流過遷急點(Flow over a knickpoint)等, Annandale(2006)提出不同情況下可以直接使用的計算公式:
1.直線段明渠(Open channel flow─Straight reaches.)
在直線段明渠的情況下,可以由下式計算得水流侵蝕能量:
Pchannel = 7.853ρ(τ𝑤
其中 𝜏𝑤 = 𝜌𝑔𝑦𝑠 (式 2.2) τw為牆面剪應力,ρ 為水的密度,g 為重力加速度,y 為水深,s 為河 道橫剖面的邊長 2.水流越頂(Headcut) 在水壩或是攔河堰的下游,水流的情形為 headcut 的狀態,如圖 2.3 所示,此時的水流侵蝕能量主要是由 q3的渦流控制,有關這種狀況侵 蝕能量的計算可以利用下式求得: SP𝑖𝑚𝑝𝑎𝑐𝑡 = 𝑟𝑞𝑦𝑐[∆𝑧 𝑦𝑐 + 3 2+ 𝑦1 𝑦𝑐 − 1 4( 3 2+ ∆𝑧 𝑦𝑐) (1 + 1.06 √𝑦𝑐∆𝑧+32) 2 ] (式 2.3) 其中 𝑦𝑐[∆𝑧 𝑦𝑐 + 3 2+ 𝑦1 𝑦𝑐 − 1 4( 3 2+ ∆𝑧 𝑦𝑐) (1 + 1.06 √∆𝑧𝑦𝑐+32) 2 ] = 能量消散∆E (式 2.4)
圖 2.3 水流越頂示意圖(Annandale,2006) 3.遷急點坡度變化(Flow over a knickpoint)
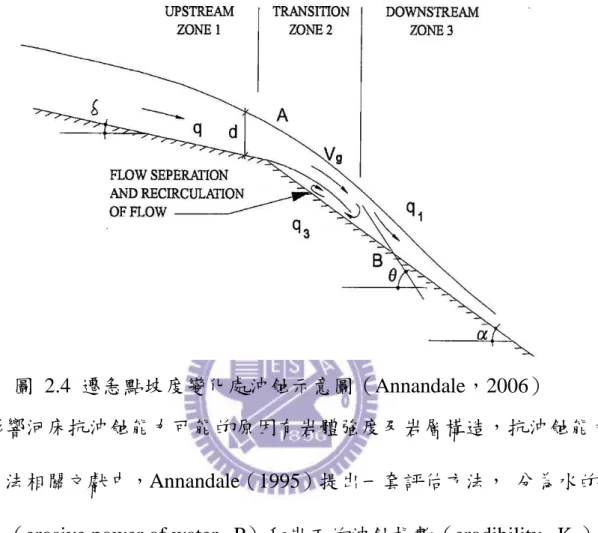
正常河床常會有遷急點的產生,如圖 2.4所示,當能夠明確的知 道遷急點上下兩側的坡度時,可以用下式來計算水流流過此遷急點對 下方造成的侵蝕威力,產生侵蝕威力的主要力量為 q3造成的渦流 𝑆𝑃𝑘𝑝 = γ𝑞𝐿[1−𝑐𝑜𝑠(𝜃−𝛼)1+𝑐𝑜𝑠(𝜃−𝛼)𝐾1𝑉2𝑔𝑔2 + 𝐿𝑆𝑓] (式 2.5) 其中 1 𝐿[ 1−𝑐𝑜𝑠(𝜃−𝛼) 1+𝑐𝑜𝑠(𝜃−𝛼)𝐾1 𝑉𝑔2 2𝑔+ 𝐿𝑆𝑓] = 能量消散∆E (式 2.6) L:轉換區長度 Sf:水流流過遷急點的平均能量坡降 K1:考慮非流體力學的能量計算,在下游區(zone3)的係數 其中 L 與 Sf的估算在 Annandale(2006)並沒有明確的公式與理論值,
僅建議可以依工程上的角度利用上下游能量坡降自行判斷,讓這個式 子的使用上有不確定因素。
圖 2.4 遷急點坡度變化處沖蝕示意圖(Annandale,2006)
影響河床抗沖蝕能力可能的原因有岩體強度及岩層構造,抗沖蝕能力 評估方法相關文獻中,Annandale(1995)提出一套評估方法, 分為水的侵 蝕能量(erosive power of water , P)和岩石的沖蝕指數(erodibility , Kh)兩 部份,其關係式為: P = f(𝐾ℎ) (式 2.7) 其中, P = γq∆E (式 2.8) γ 是水的單位重,q 為單位流量,ΔE 為能量損失; Kh = MsKbKdJs (式 2.9) Annandale 試圖建立一套仿造岩體品質評分系統之抗沖蝕指數指標
(erodibility index),此一指數為四項參數的乘積,這四項參數分別為 Ms 材料參數、Kb顆粒/塊體尺寸參數、Kd弱面或顆粒間之抗剪強度參數與 Js 地盤構造條件。各參數依不同條件給予不同之指定值,由四項參數之乘積 得到抗沖蝕指數。 Annandale 計算了一、兩百處不同河道之抗沖蝕指數。他又依不同河道 流況(如陡降、水躍、河床坡度突然改變、均勻明渠)依明渠流體力學理 論計算各處河道之能量消耗,並紀錄現場是否發生沖蝕,將能量消耗對抗 沖蝕指數繪出雙對數圖關係(如圖 2.5),進而推估對應特定抗沖蝕指數條 件恰發生沖蝕時所需之能量消耗門檻值。 圖 2.5 能量消耗 v.s.沖蝕指數雙對數關係圖(Annandale,1995) Annandale(1995,2006)之流功與沖蝕指數關係研究,依照沖蝕指數將 資料區分為兩種類型:粒狀材質與岩盤材質,分別將臨界流功 Pcrit(kW/m 2 )
與沖蝕指數 Kh之關係式如下: 𝑃𝑐𝑟𝑖𝑡 = {0.48𝐾ℎ0.44 , 𝐾ℎ ≤ 0.1 𝐾ℎ0.75 , 𝐾ℎ > 0.1 (式 2.10) 但是在經濟部水利署水利規劃試驗所(2010)中也提到,此指數是否 適用於台灣之軟弱岩層抗沖蝕評估,仍有待驗證與改良。 2.1.3 遷急點倒退模型 Hayakawa 和 Matsukura(2003)對日本房總半島地區的遷急點倒退進 行迴歸分析,其模型概念為利用單位面積沖蝕力 F 與岩床單位面積的阻抗 力 R,將 F 與 R 的比值視為遷急點倒退的指標,後續以 FR 表示, 決定單位面積沖蝕力 F 的主要參數為流量 Q,然而多數狀況下不易取 得,則利用上游集水區面積 A 與年降雨量 P 的乘積取代;另外計算河流沖 蝕作用面積,對照 2.1.1 節的圖 2.1 中遷急點位置河寬 W 及落差 H;最後 考慮水的單位重ρ,則可得到下列關係: 𝐹 ∝ (𝜌, 𝐴, 𝑃, 𝑊, 𝐻) (式 2.11) 此處忽略不連續面、強度異向性等,利用無圍壓縮強度 Sc作為阻抗力 R 的參數,即: 𝑅 ∝ (𝑆𝑐) (式 2.12) 將以上參數分為ρ、AP、WH 和 Sc四組進行無因次分析,可得到無因 次指標 FR 表示如下式 2.13: 𝐹 𝑅 = 𝐴𝑃 𝑊𝐻√ 𝜌 𝑆 (式 2.13)
將房總半島 9 筆遷急點資料進行迴歸,使用的參數資料如表 2.1 所示, 迴歸結果為式 2.14,其中 D 為倒退距離,T 為倒退時間,99.7 的單位為距 離除上時間(m/yr),遷急點倒退率與無因次指標 FR 的關係圖為圖 2.6。 𝐷 𝑇 = 99.7 [ 𝐴𝑃 𝑊𝐻√ 𝜌 𝑆𝑐] 0.73 (式 2.14) 表 2.1 房總半島遷急點參數資料(修改自 Hayakawa 和 Matsukura,2003) 編號 名稱 A 106(m2) P (mm/yr) W (m) H (m) Sc 106(Nm-2) 實際倒退率 (m/yr) 1 Soho Falls 0.29 1600 0.17 1.8 18.1 0.13 2 Oikawa-fudo Falls 2.0 2000 6 6.1 20.1 0.067 3 Fukasawa-no Falls 0.60 2000 6 11 37.2 0.018 4 Takisawa-no Falls 1.1 2000 8 12 37.2 0.016 5 Afuri Falls 14 2000 8.6 3.6 18.9 0.18 6 Zenzen Falls 11 2000 32 5 17.8 0.1 7 Ito-fudo Falls 0.18 1800 9 32 23.2 0.0013 8 Sanogawa-no Falls 3.6 1800 2 4.4 15.4 0.27 9 Ryogenji Falls 0.34 1800 4 30 23.7 0.0018
圖 2.6 遷急點倒退速率 v.s. FR 指數關係圖(Hayakawa 和 Matsukura,2003) 由迴歸結果可看出,資料 1 和 9 的部份,模型計算結果有高估的狀況, 但整體結果很一致,後續也將此模型應用於其他地區的資料做驗證 Hayakawa 等人(2009)進一步將此模型應用於台灣地區,試圖探討九 二一集集地震所引致的遷急點倒退,研究的河道為:大甲溪、大里溪、頭 汴坑溪及乾溪,倒退期間為 1999~2005 年共 6 年的時間。 參數取得的部份,集水區面積是使用 90 公尺精度的 SRTM-3 DEM 在 GIS 上進行計算求得;年平均降雨量 P 則是引用 Daly(2002)針對台灣地 區 1961~1990 年的降雨資料,在 GIS 上進行空間分析;遷急點的幾何因子
遷急點寬度 W 及落差 H 則是 2005 年進行現地調查,利用雷射測距儀量測 而得;無圍壓縮強度 Sc的部份,大甲溪及大里溪是在現地使用史密特錘測 得之反彈值(RN)換算而得,頭汴坑溪及乾溪的岩石較為脆弱,無法使用 史密特錘量測,則在頭汴坑溪遷急點下游側取樣,進行室內實驗以獲得無 圍壓縮強度。 台灣地區資料及代入式 2.13 的結果如表 2.2 所示,與其他地區資料套 疊之關係圖如圖 2.7 所示。 表 2.2 台灣地區參數目錄及估計結果(修改自 Hayakawa 等人,2009) 編號 名稱 A 106(m2) P (mm/yr) W (m) H (m) Sc (MPa) 實際倒退率 (m/yr) 估計倒退率 (m/yr) 1 大甲溪 1095.1 4000 160 6.6 17.81 3.3 0.64 2 大里溪 25.5 2200 8 2.4 14.28 58.2 0.53 3 頭汴坑溪 74.6 2200 25 3.2 0.29 22.8 1.71 4 乾溪 16.2 2000 5 3.6 0.29 35.2 1.56
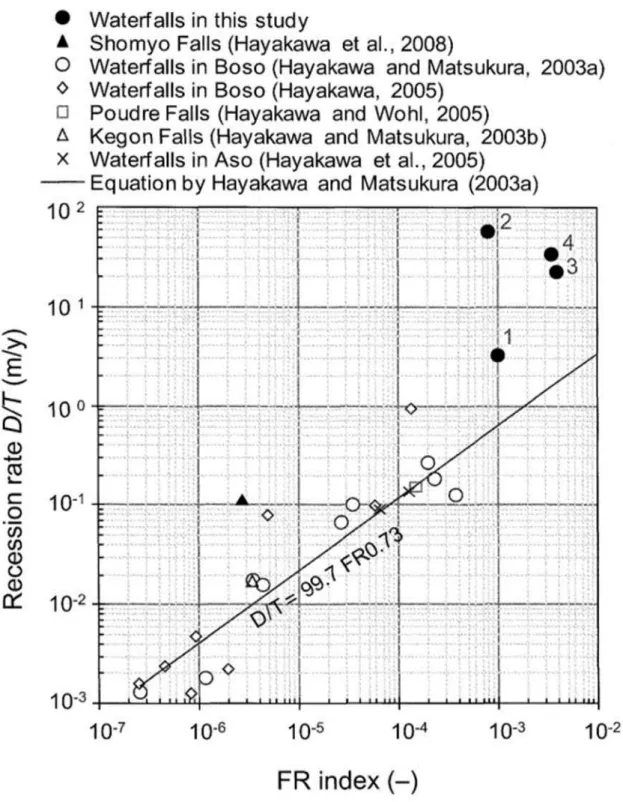
圖 2.7 遷急點倒退速率 v.s. FR 指數關係圖(Hayakawa 等人,2009) 由圖 2.7 可看出,此模型所估計的倒退速率遠小於實際倒退速率,尤 其在資料 2(大里溪)的部份相差約 100 倍,顯然將此模型不適用於台灣的 遷急點倒退資料,推測造成誤差的原因如下:
1. 未考慮岩層構造、河道坡度等因素。由於台灣地區岩層構造較複雜, 若忽略構造因素的影響,可能會高估岩床的阻抗力,進而低估倒退 速率;另外,在模式有使用落差,但並不討論坡度的因子,也能會 造成影響。 2. 遷急點倒退摸式唯一。在此模式下,考慮的狀況為在遷急點平行倒 退的狀況,但在台灣的資料顯然並不適用這樣的倒退模式。 基於以上理由,Hayakawa 和 Matsukura(2003)的模型無法解釋台灣 的遷急點倒退,因此,需要重新擬定遷急點倒退模型。
2.2 工程最佳化演算法
2.2.1 工程最佳化演算法 工程最佳化演算法是用來求解工程上最佳化問題,如工程的設計、規 劃與決策等分析問題,無非是想節省成本與時間,因此藉由此方法來求得 最大效益的結果以解決工程最佳化問題。 概略流程為將工程最佳化問題表示數學模式,透過最佳化理論求解, 最後由求得的解來解闡釋整個最佳化系統,此種不用真實操作求最佳解的 方式稱為「工程最佳化演算法」,如圖 2.8。圖 2.8 工程最佳化演算法(改繪自 Reklaitis 等人,1983) 在將真實系統推導程數學模式時,Reklaitis 等人(1983)將構成工程最佳 化演算法的基本數學架構,分成四個要件: 1. 定義最佳化問題系統邊界 2. 效能規範 3. 變數 4. 系統模式化 最佳化演算法基本數學架構組成順序說明如下: 1. 以適當的數學式來定義真實系統。這會影響整個最佳化問題是 否能有效求解,所求得的解是否有意義。應避免將問題過於簡化,或是 給太多不必要的考慮條件,甚至是關鍵因子完全被忽略了,因此要清楚 瞭解問題的需求,才能有效的定義最佳化問題系統邊界。 2. 決定問題之最佳化的目的是要滿足哪些要求。當考慮的目標多 於一個時,一般會選用一個為主要目標,其他則為限制條件,此類之要 求規定稱效能規範。 3. 選擇能夠充分反映問題特性的因子,即設計變數。變數的選擇 取決於問題考慮的仔細程度,若考慮太多不相關的變數或關鍵因子沒表
達出來,可能會得到非最佳解。 4. 系統模式化。也就是綜合上述三個步驟,使整個問題系統表示 為數學的模式。 最佳化演算法依問題複雜度、考慮條件或變數間的關聯性等條件,可 分為不同的問題型態,而設計者可以不同的問題型態選擇求解方式。Yang (2010)對最佳化問題型態做了簡單的分類如下圖 2.9 所示: 1. 單目標與多目標:單目標最佳化模式,目標函數只考慮一時, 稱之;相對的,當目標函數代表不只一個最佳化目標時,稱多目標最佳 圖 2.9 最佳化問題分類表(改繪自 Yang,2010)
化模式。 2. 限制性與非限制性:除了目標函數與目標變數外,不考慮任何 條件時,稱非限制性最佳化模式;反之,當變數值有上、下限或目標函 數需要滿足次要目標時,稱限制性最佳化模式。 3. 單峰與多峰圖形:當一個全域最佳化問題只存在一個最高點或 最低點,稱為單峰(unimodal);相反則稱為多峰(multimodal)。 4. 線性與非線性規劃:當目標函數與限制條件兩者為線性模式且x 為連續變數,稱之為線性規劃(Linear Programming,LP)問題;若目標 函數為非線性則稱非線性規劃(Nonlinear Programming,NLP)。 5. 連續、離散與複合型變數:若以數量、規格、尺寸或二選一等 方式為設計因子,稱離散變數;當變數在某設計值範圍內稱為連續變數; 當離散變數與連續變數同時存在,則稱為複合型變數。 6. 確定性與隨機性:當問題的設計變數、限制條件及目標函數沒 有不確定性和干擾,則為確定性問題;反之,當問題的設計變數、限制 條件及目標函數存在不確定性和干擾,則稱為隨機性最佳化問題
(stochastic optimization problem)。
除了上述的分類方式外,依據不同的要件可以再將問題型態細分。另 外一種特殊分類為靜、動態問題,其主要不同在於:當要求變數 * x 是否為 最佳解時,稱靜態最佳化問題;而動態問題則是要如何找出最佳解。 最佳化演算法的應用相當廣泛,涵蓋了各種學科及專業領域,甚至是 日常生活問題,如財務分配的規劃、送貨員問題等都是其應用。在大地工
能應用最佳化演算法求取最佳解。
最佳化演算法的源起可追溯至 Newton、Lagrange 與 Cauchy 的年代, 而後由 Bernoulli、Euler、Lagrange 與 Weirstrass 奠定利用變分學(Calculus of Variations)方法處理最佳化問題的基礎。由於最佳化計算過程耗時,在二十 世紀中期前發展緩慢,直到電腦問世之後,計算耗時的問題才得以解決。 之後發展出一系列與線性規劃(Linear Programming)相關之方法。在 20 世紀 末,最佳化演算法結合了人工智慧的啟發式演算法問世,如基因演算法 (Genetic Algorithms)、類神經網路法(Neural Network Method)等。最後近年 來發展出一系列擬生的「啟發式最佳化演算法」(Heuristic optimization algorithms),如螞蟻族群演算法(Ant Colony Optimization,ACO)、粒子群 法(Particle Swarm Optimization,PSO)等。
傳統最佳化演算法求解過程一般順序是:先給定起始值和初始條件, 以數值方法或技巧決定下一個搜尋點的移動方向和步長大小,漸漸地縮小 搜尋範圍並趨近鄰近的最佳解的求解法;相對的啟發式最佳化演算法的求 解方式,則是在整個問題系統中做有系統性的隨機搜尋,直到滿足設計者 期盼的目標值或目標條件為止。 啟發式演算法結合了隨機搜尋演算法的優點(如:能跳脫出,陷入局部 性搜尋的困境、比較不會有數值計算上的問題產生、搜尋原理簡單和能有 效搜尋到最佳解附近區域)與直接搜尋方法的優點(如:能使用當前或之前的
計算值資料,類似使用者能夠考慮以往的經驗來決定下一次迭代的設計值 一樣、加快收斂速度…等)。以下對傳統最佳化演算法與啟發式最佳化演算 法,在設計或求解上之優、缺點比較如表 2.3。 表 2.3 傳統與啟發式最佳化演算法之優、缺點比較 優點 缺點 傳 統 最 佳 化 演 算 法 演算法之參數設定簡單 主觀性給定起始值 適用簡化或假設性問題 需計算導數資料 以導函數搜尋之迭代次數少 需記憶體儲存導數資料 不需嘗試各種情況 屬區域性搜尋之局部最佳解 實際應用的限制相當多 適用範圍小 啟 發 式 最 佳 化 演 算 法 簡單搜尋概念求解 主觀性設定終止搜尋條件 不用給定起始值 演算法參數的設定需經過測試 才能得到適用的參數值 不需繁雜的數學式 全域性搜尋 隨機搜尋之迭代方式,其迭代 次數比能使用函數之導數搜尋 方法多。 能跳脫局部解情形 適用範圍廣
2.2.2 啟發式最佳化演算法 啟發式最佳化演算法,以理論概念將最佳化問題表示成一系列的設計 變數,配合模擬自然界現象等最佳化策略,啟發我們設計演算法架構,並 考慮先前搜尋結果來引導下一次迭代,以隨機方式而非以導函數資料來改 善最佳解的演算法。 Yang(2009)指出最佳化演算法之搜尋精神為 Intensification 與 Diversification,概念類似工程上探測(Exploration)與鑽探(Exploitation), 能克服傳統最佳化演算法計算上的缺陷。而此兩元素權重對於求解的優劣 效率有相當重要性,比較如表 2.4(改自康詩凰(2011))。 表 2.4 Intensification 與 Diversification 之比較 比較 翻譯 比喻 值域 解 效率 Intensification 加強版 開發 局部 收斂 快 Diversification 多樣化 探測 整體 發散 慢 這類方法最大優點是:求解效果佳,且相對於傳統求解最佳化法上, 較不受限於如何適當選取初始值的問題,並以隨機方式搜索得到的解較靈 活、較能跳脫局部解情形,因此也不用記錄求解過程大量函數導數資料, 應用範圍也較廣。 以下介紹常見的啟發式最佳化演算法:遺傳演算法、模擬退火法、禁 忌搜尋法、螞蟻族群演算法、粒子群法、和弦搜尋演算法及螢火蟲演算法。
1. 遺傳演算法(Genetic Algorithms,GA) 又稱基因演算法,由 John Holland 在 1975 年以達爾文進化論的「物 競天擇,適者生存」所發展的一種搜尋演算法,這是最早出現的啟發式 演算法,當時克服了許多傳統最佳化演算法的缺陷。此法是模擬生物過 程對環境的適應能力,適應力高者,表示生存能力強,因此遺傳給下一 代的機率相對較大。 搜尋步驟: 1. 先將變數進行編碼(Encoding),以二位元或實數方式表示成 染色體和基因的形式。 2. 定義目標函數與基因選擇的準則。 3. 隨機產生一組初始族群(Population),並評估初始族群中,由 不同染色體組成所代表的個體,即求函數值,並有各別被選取的機 率大小。 4. 接著運用遺傳演算法三個運算元,進行基因的選擇 (Selection)與複製(Reproduction)、交配(Crossover)和突變(Mutation), 產生下一代新的一組族群以改善當前的族群。 5. 重復更新直到到達目標為止。 方法特性: 適用於各種型態之問題,如:連續或不連續、線性或非線性、靜態 或動態等問題,應用上比較不受限。此方法最大的缺點在於需將變數進 行編碼與定義基因的遺傳準則,儘管如此,基因演算法仍是一套被廣泛 使用的啟發式演算法。
2. 模擬退火法(Simulated Annealing,SA) 主要是 Kirkpatrick 等人在 1983 年提出,以 Metropolis 等人在 1953 年以蒙地卡羅的統計機率觀念,模擬分子在高溫狀態下,分子隨機散佈 在範圍空間中移動,逐漸冷卻的行為。 搜尋步驟: 1. 定義初始溫度以及變數之初始值。 2. 設定最後的收斂溫度與迭代次數。 3. 定義冷卻準則(即接受機率,會隨溫度降低而變小)。 4. 接著在初始值附近找出一個新設計點目標值,判斷新設計值 是否小於當前值,若是的話就取代當前值,否則就以隨機亂數判斷 是否接受此設計值。 5. 重複更新直到到達目標為止。 方法特性: 模擬退火法相較於傳統最佳化法能跳出局部解,是因為允許搜尋過 程也可接受目標值較高的設計點。缺點為當設計問題的溫度區間太大時, 所需計算的時間久。應用上,適用不連續的問題。
3. 禁忌搜尋法(Tabu Search,TS) Glover,1986 年以模仿記憶方式所發展的一種最佳化演算法。記憶 之前搜尋結果以避免陷入局部解,也稱輔助式啟發性演算法。 搜尋步驟: 求解步驟與 SA 類似,搜尋概念一樣為選定一起始點,接著在起始 點附近,隨機搜尋不在短期記憶之禁忌列表(Tabu List)中的下一個移動 點,如果目標值比原本的點還差,則將此點加入禁忌列表並繼續搜尋, 如目標值比原本的點好,則將原本的點加入禁忌列表並且往新的點移動 若有則取代之,重複此步驟直到滿足終止條件止。 方法特性: 與 SA 相同要決定一起始點;短期記憶量越大,越不會陷入局部解, 相對地,要儲存整個記憶列表的容量也會隨之變大;雖可利用長期記憶 提升搜尋的多樣化,但全域性搜尋能力尚不足;應用上,特別適用工程 管理方面問題。
4. 螞蟻族群演算法(Ant Colony Optimization,ACO) Dorigo 等人於 1991 年由觀察螞蟻群覓食所發展的演算法,螞蟻搬 運食物回程時,會分泌一種荷爾蒙的費洛蒙(Pheromone),且荷爾蒙濃 度會隨時間消散蒸發,其他螞蟻可依不同濃度大小之路徑機率選擇覓 食路徑,依此方式重覆至最後,可發現幾乎所有螞蟻都走同一條接近 最短路徑,如圖 2.10。 圖 2.10 螞蟻族群演算法示意圖 搜尋步驟: 1. 定義目標函數。 2. 定義費洛蒙濃度消散率。 3. 透過位置移動公式決定螞蟻下一次移動點的位置重複更新 直到到達目標為止。 方法特性: 適用問題規模,廣特別適用路線規劃方面問題,於簡單問題可在短 時間得相近之最佳解,而複雜問題則比其他演算法更能得較好的解;缺 點為實際應用時需將問題轉換成路徑方式表示。而影響最大的是路徑選 擇的機率與費洛蒙更新的參數設定,決定是否能搜尋成功的關鍵。
5. 粒子群法(Particle Swarm Optimization,PSO)
由 Kennedy 和 Eberhart 在 1995 年提出,與 GA 與 ACO 一樣是以群體 為基礎所發展的一種最佳化演算法,模擬鳥群或魚群在空間中覓食的社 會行為,但是粒子群法相較之下概念簡單許多,不需要用到突變與交配 運算元,也不需要用到費洛蒙濃度,取而代之的是用空間中的距離與空 間中粒子群互相的溝通。 搜尋概念為將個體視為粒子,一開始隨機產生各粒子的初始位置和 初始速度;計算出表示各粒子適應力的函數值;接著每顆粒子會依本身 經驗與直覺,在範圍空間內移動至覺得較佳的位置,即產生修正的速度 與對應位置,比較函數值是否比當前好;當群體中有更佳的函數值時, 粒子之間會相互溝通,並引導各粒子漸漸地往當前所謂的全體最佳解移 動;依此方式不斷產生新的位置和速度直到滿足終止條件為止。 搜尋步驟: 1. 定義目標函數。 2. 隨機產生 n 個粒子與其初始位置和初始速度,計算每個粒子 的目標函數值。 1. 每顆粒子產生新的速度並移動到新的位置,並比較函數值是 否比當前好,如比較好則取代粒子當前的目標值以及其位置。當每
顆粒子更新完當前的目標值之後,再判斷每個粒子更新後的目標值 是否比原本群體的最佳目標值好,如比其好則取代之。 3. 重複更新直到到達目標為止。 方法特性: 考慮當前解群體的資訊;適用領域相當廣,大多情況下比 GA 收斂 快,特別是對於動態系統提供了一個高適應性的最佳化方法;各粒子擁 有各自的記憶與判斷力;屬於區域與全域共同評估的搜尋法。
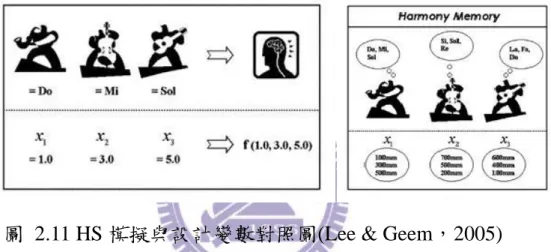
6. 和弦搜尋演算法(Harmony Search,HS) 2001 年由 Geem 等人所提出發表,為一種進化版的啟發式演算法, 發展至今已有 10 年之久。此方法模擬音樂家們使用不同樂器一起即興 演奏下,每位音樂家各自記憶所彈奏的曲調,並藉由每次合奏後來調音, 因此,經過數次的即興演奏後所演奏的音樂會越來越和諧、越美妙,依 此種方式產生的最佳演奏概念來求解,稱和弦搜尋演算法,如圖 2.11 所示。
圖 2.11 HS 模擬與設計變數對照圖(Lee & Geem,2005)
搜尋步驟:Geem (2010)說明最先進的 HS 演算法架主要分成 7 大 步驟
1. 問題公式化(problem formulation) 2. 參數設定(algorithm parameter setting)
3. 隨機產生初始記憶(random tuning for memory initialization) 4. 改善和弦:隨機選取、考慮記憶與調音 (harmony
improvisation : random selection, memory consideration, and pitch adjustment)
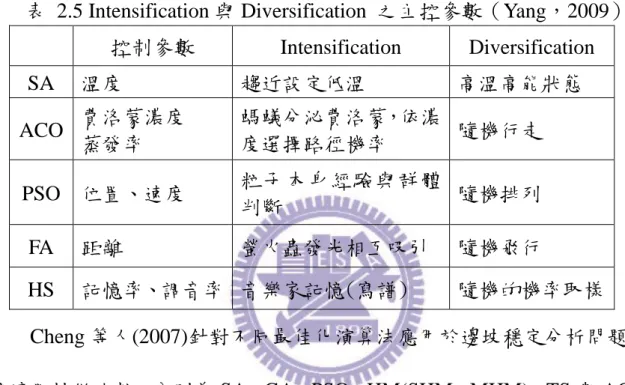
7. 終曲(cadenza) 一開始將問題以數學模式表示,即公式化;接著給定參數值或相關 參數設定後;以完全隨機模式產生一組解(和弦)作為初始和弦記憶向量 (HM),以上(步驟 1~3)歸類為問題的初始化,如圖 2.12;接下來(步驟 4~6)為問題的搜尋方式,設定演算法參數之機率(HMCR、PAR、bw)後 隨機產生一個解(和弦);此新產生的和弦若是比 HM 中任一個好,則剔 除最差者並取代之;接著一直重複步驟 4、5 直至達終止目標為止。步 驟 7 類似樂曲接近結尾的一段裝飾奏,將最佳解(和弦)再做一次演奏或 修飾後來收尾。演算法完整流程表示如圖 2.13。 假設搜尋解區間為一群離散的值(即 bw 為定值),形式如 {𝐷𝑖(1), 𝐷𝑖(2), … , 𝐷𝑖(𝑘), … , 𝐷𝑖(𝐾𝑖)},在改善和弦階段中分三種方式產生 新和弦,分別是隨機選取(式 2.15)、考慮記憶(式 2.16)與調音(式 2.17), 而決定以哪種方式產生新和弦是以和弦記憶比率(Harmony Memory Considering Rate,HMCR)與調整比率(Pitch Adjusting Rate,PAR)控制, 並以兩者參數關係來改善最佳化搜尋,其中第三種產生和弦的調音方法, 其調整量的大小為 bw(Bandwidth),三種產生新和弦之概念如圖 2.14。
方法特性: 離散、連續或不連續變數均能使用;不用給定初始值;較不受區 域性限制;原理簡單,使用容易;搜尋解的量不會因變數量增加而大 幅度上升。 𝐷𝑖𝑁𝑒𝑤 ← 𝐷𝑖(𝑘), 𝐷𝑖(𝑘) ∈ {𝐷𝑖(1), 𝐷𝑖(2), … , 𝐷𝑖(𝐾𝑖)} (式 2.15) 𝐷𝑖𝑁𝑒𝑤 ← 𝐷 𝑖(𝑙), 𝐷𝑖(𝑙) ∈ {𝐷𝑖1, 𝐷𝑖2, … , 𝐷𝑖𝐻𝑀𝑆} (式 2.16) 𝐷𝑖𝑁𝑒𝑤 ← 𝐷 𝑖(𝑙 ± 1), 𝐷𝑖(𝑙) ∈ {𝐷𝑖1, 𝐷𝑖2, … , 𝐷𝑖𝐻𝑀𝑆} (式 2.17) 圖 2.12 隨機產生初始和弦記憶
圖 2.13 和弦搜尋最佳化演算法流程圖(Lee & Geem,2005)
7. 螢火蟲演算法(Firefly Algorithms,FA) 此演算法為 Yang 在 2007 年所提出,透過模擬螢火蟲利用閃爍的 螢光吸引異性的行為所發展的演算法。 搜尋策略:螢火蟲在吸引異性時,會閃爍螢光,而螢光的強度除 了與自身的發光強弱有關外,與其他螢火蟲間的距離也有關係,因此當一 隻螢火蟲要尋找,另外一隻異性螢火蟲時,起初可能相距太遠因此採隨機 飛行的方式尋找,當兩隻螢火蟲靠近時可以透過閃爍的螢光吸引而尋找到 目標。 方法特性:由於此方法是在解集合空間中平均散佈 N 隻螢火蟲, 再開始做搜尋,不會有陷入局部解之問題,收斂速度快。適用問題範圍廣, 離散與連續的函數皆可使用。其主要控制因子為螢光的強度(式 2.18): I = I0e−γr (式 2.18) I0為螢光源之強度,I 為螢光傳遞距離 r 後的強度,γ 為光吸收率。 當離目標值越近時,I 的值就會越大,收斂速度快。如果散佈於解集合 空間的螢火蟲數量太少時,容易錯過全域最佳解,因此如何在此兩參數間 做平衡是搜尋是否成功的關鍵。
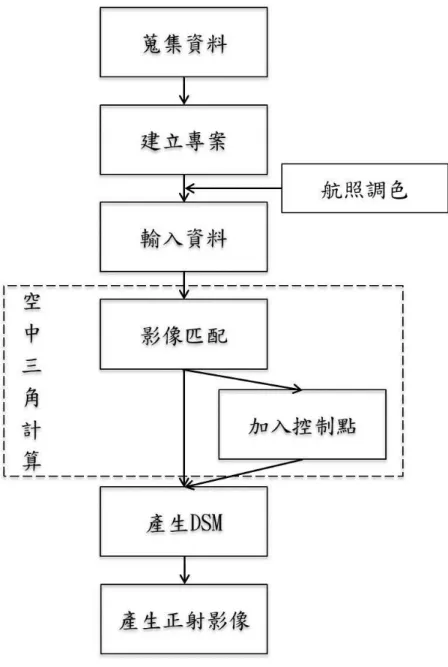
在介紹完上述幾種常見的最佳化演算法後,從先前介紹的啟發式演算 法可知 Intensification 與 Diversification 對於求解的優劣效率有相當重要性, Yang (2009)整理幾個常見的最佳化演算方法(SA、ACO、PSO、FA、HS) 比 較 Intensification 與 Diversification 之主控參數與說明如表 2.5。
表 2.5 Intensification 與 Diversification 之主控參數(Yang,2009) 控制參數 Intensification Diversification SA 溫度 趨近設定低溫 高溫高能狀態 ACO 費洛蒙濃度 蒸發率 螞蟻分泌費洛蒙,依濃 度選擇路徑機率 隨機行走 PSO 位置、速度 粒子本身經驗與群體 判斷 隨機排列 FA 距離 螢火蟲發光相互吸引 隨機飛行 HS 記憶率、調音率 音樂家記憶(寫譜) 隨機的機率取樣 Cheng 等人(2007)針對不同最佳化演算法應用於邊坡穩定分析問題深 淺適用性做比較,分別為 SA、GA、PSO、HM(SHM、MHM)、TS 與 ACO, 如表 2.6 所示。 表 2.6 常見最佳化方法適用性比較(Cheng 等人,2007) 問題複雜性 適用方法 一般~簡單(變數<20) 每種方法都適用,以 HS 和 GA 最有效。 TS 和 ACO 視問題而定。 一般~簡單(變數>20) MHM 和 PSO,求解時間不因問題複雜程 度不同而太大變化。 更複雜或大量變數 PSO。 有軟弱薄層 PSO。 特殊作用情況 收斂較易失敗,SA 和 PSO。
本研究使用最佳化方法進行參數率定,變數量可能不至於大於 20 個, 但是由於需要使用長時間的資料,計算數據量較多,因此先排除 GA、ACO 兩種方法,GA 需先將問題變數編碼,而 ACO 需將問題轉換成路徑方式表 示,這兩種方法本身較複雜,在數據量多的狀況下計算時間可能會被拉長; 接著 SA 與 TS 則容易受限於問題的搜尋區間大小,因此也排除在外;最後 考慮 PSO、FA 與 HS 三種方法,PSO 是利用當前最佳解來引導其他解移動 的方向,相較於 HS 隨機搜尋性較差,FA 則是先將所有可能解均勻散布於 解的空間中,再快速收斂至最佳解的區域,然而相較於 HS 收斂的參數設定 較複雜。 因此,本研究使用的方法為和弦搜尋演算法,後續針對此演算法介紹 近期相關的改良方法。 2.2.3 和弦搜尋演算法之改良 近年發展許多改良的和弦搜尋演算法,Alia 和 Mandava(2011)將改 良的方式分為兩類:第一類為針對和弦搜尋演算法的參數做改良,第二類 為混合和弦搜尋演算法與其他啟發式演算法的元素做改良。以下沿用前二 種分類,另外加上針對和弦搜尋演算法本身流程做改良,共三種分類方式, 以下為近年之改良方法: 2.2.3.1 針對和弦搜尋演算法的參數做改良 Mahdavi 等人(2007)針對搜尋過程中 PAR、bw 兩參數做動態修正,
使參數隨迭代增加而遞減,並以例子比較和驗證其有效性。 Mukhopadhyay 等人(2008)以統計分析方式推導並證明母體變異數 (Population-variance)與 HS 搜尋解之性能,並做一些參數探討。 Geem 等人(2010)針對和弦搜尋演算法提出了一套參數自由設定的方法 (Parameter-setting-free technique),主要的目的是將原本為定值的 HMCR 與 PAR 調整為可隨迭代次數改變,此方法包含三個步驟: (1) Random tuning:與原版和弦搜尋演算法相同,隨機產生與和弦記憶 大小(HMS)一樣多的初始和弦記憶。 (2) Rehearsal:利用初始的 HMCR 與 PAR 產生 m 倍 HMS 的新和弦(一 般設定初始 HMCR 與 PAR 為 0.5,HMS 為 30,m 為 3),並額外設置一個 與 HMS 大小相同的記錄矩陣,記錄每次產生新和弦時的操作為隨機產生、 選取和弦記憶或是調音產生,如圖 2.15。 (3) Performance:在每次迭代前利用式 2.19 與式 2.20 計算出 HMCR 與 PAR 以產生新和弦,如果新和弦有更新 HMS,則同步更新記錄矩陣。 M = bers( e r ) (式 2.19) P = bers( ch) (式 2.20)
圖 2.15 Rehearsal 產生之記錄矩陣(Geem 等人,2009) Pan 等人(2010)將 bw、HMCR 和 PAR 三參數均做修正,將 bw 視為 迭代次數的函數,隨次數增加而下降。HMCR 和 PAR 則假設為常態分佈曲 線,初始隨機選取 HMCR 及 PAR,之後隨迭代次數更新常態分佈曲線的平 均值與標準差,作為新的常態分佈曲線。 2.2.3.2 混合和弦演算法與其他啟發式演算法的元素做改良 Omran 和 Mahdavi(2008)將 HS 加入粒子群法的概念,在調音階段, 新的和弦其中一參數由當前最佳組合的參數更新,利用此概念取代 HS 對 bw 的需求性。 Geem 等人(2009)將和弦搜尋演算法加入了粒子群法的概念(藉由群體 中當前的最佳粒子來引導群體的往最佳解移動),與原版本之差別為選取 HM 產生新的和弦時加入一 PSR(Particle Swarm Rate)機率參數判斷考 慮是否要選取當前 HM 中目標值最佳的和弦。
Zou 等人(2010)加入粒子群法和基因演算法概念,HMCR 和 PAR 參 數均不使用,加入基因突變機率,利用更新位置和基因突變產生新的和弦, 並與其他改良的和弦演算法做比較,在非限制性問題上有較好的表現。
江長潤(2012)基於 Geem 等人(2009)和 Geem(2010)的概念,將原 始和弦搜尋演算法加入粒子群法和參數自由設定的方法,並利用數值微分 加強收斂速度及精確度,相較於原始和弦搜尋演算法在反算分析上有較佳 的成果,但數值微分的適用性則有待商榷。 2.2.3.3 針對和弦搜尋演算法本身流程做改良 Ye 等人(2012)針對限制性問題做改良,將符合限制與否作為目標函 數的一種,利用中國大陸對建築物設計振動規範進行模擬。 Ashrafi 和 Dariane(2012)基於和弦搜尋演算法的概念,提出旋律搜尋 演算法(Melody Search,MS),將搜尋過程分為兩階段,先第一次搜尋使 範圍縮小再進行第二次搜尋,在多變數問題有較好的成果。 Geem(2012)提出在搜尋過程中,限制在 HM 中重複和弦的數量,以 避免過早收斂,並提高找到最佳解的頻率,實際應用於不連續問題上有不 錯的成效。 基於以上文獻,本研究使用之和弦搜尋演算法,由於參數變化和迭代 次數之間關係可能非線性,因此採用參數自由設定的方法。除此之外加入 粒子群法做改良,另外由於數值微分的適用性有待商榷,因此在搜尋過程 中加入限制在 HM 中重複和弦的數量的概念,但是此方法應用於連續變數 的效率有待驗證。
2.3 航空攝影測量
航空攝影測量是在飛行載具上設置航空照相機,對地面進行拍攝,再 利用攝影測量之原理,組成立體模型並進行影像校正,以從事各式地圖測 繪及地物判讀等工作。 2.3.1 航空攝影測量基本作業方式 航空攝影測量作業項目包含飛航規劃、航空攝影、像片掃描、空中三 角測量、製作數值地形模型及影像正射糾正,流程如圖 2.16。 圖 2.16 航空攝影測量作業流程圖飛航規劃要項如下列所示: 1. 照片種類:依據不同的目的使用不同的比例尺、相片種類、感測 系統、時間等。 2. 照片重疊度 為使各像片能銜接成連續圖幅及供立體相對觀察之用,要求相片 前後重疊率約 60℅~90℅,左右重疊率約 30℅,如圖 2.17 所示。 圖 2.17 垂直攝影照片示意圖(修改自楊龍士等,2003) 3. 照片比例尺 台灣在航帶規劃上多以南北向為主,除非特殊用途用東西向。 照片比例尺≒照相機焦距(f)/航高(h) 4. 空中照相機焦距 依相機不同有不同的焦距,影響景深及視角等。 5. 航高 可由照片比例尺推求航高,一般測量公司實際作業之飛行高度, 平地為 1500~3000 公尺;山地為 3500~6000 公尺,並依攝影區
內之海拔高度採行分段攝影。 6. 偏流與偏向 飛行中遇有側風時,使機首方向與實際進行方向發生偏離,產生 x、y、z 三軸偏向角ω、ψ、κ,將會影響立體覆蓋及有效寬度, 因此必須修正偏流角,使框標 X 軸與進行方向一致,否則立體照 片不能用於立體測圖,一般立體測圖儀之偏向旋轉角大都在 5 度 左右。 7. 考慮因子 a. 天候條件--晴朗無雲(<10%)、無煙霧濛氣、風不強及無大氣亂流。 一般在上午十時至下午二時為佳。 b. 攝影季節—台灣多在夏季及秋季。 c. 太陽高度--一般平地攝影應選太陽高度 30 度以上為佳,高山急峻 地區應有 35 度以上較為理想。根據研究,最佳太陽高度為地平面 上 45 度。 2.3.2 物空間坐標系統與像坐標系統之關係 航空攝影測量中有一重要的部份,也就是將像片的坐標(像空間坐標 系統)轉換為真實世界的坐標(物空間坐標系統),物空間坐標系統和像空
間坐標系統可以藉由中心透視投影(Central Perspective Projection)進行描 述,此關係是基於光線的直進性,物體所發出或反射的光線,經由透視中
心投影在像平面。如圖 2.18 所示,三維物空間之點 A(XA,YA,ZA)穿過透 視投影中心 O(XO,YO,ZO),投影在像平面的 a(xa, ya),其三點共線。P 點 為像主點(Principal Point, PP),P 點與透視中心之距離為像主距,當物距遠 大於像主距時可視為焦距。 圖 2.18 垂直攝影示意圖(Arias,2005) 此三點共線關係可以用共線條件式描述,在兩張重疊相片區內,找出 共軛點代入共線方程式,即可求出點位之三維物空間坐標。在此之前必須 先恢復攝影時之相機姿態,即內、外方位參數,才能獲得正確的三維物空 間坐標。 2.3.2.1 內方位參數 相片之內方位(Interior Orientation)作為恢復拍攝時,相機的透視投影 中心與像片間的相對關係,包含率定後的焦距、像主點在像空間坐標系統 的改正值以及透鏡畸變差,以上的參數可由相機率定報告中獲得。 1. 率定後焦距
相機製造時,會盡量將率定後焦距接近光學透鏡焦距,但仍有差異, 因此以率定後焦距稱之。一般以 f 標記之。 2. 像主點 相機攝影光軸垂直於像平面之交點,此為像空間坐標的原點。傳統 光學量測相機會在影像邊框四角或中點設置框標,對邊框標連線之 交點為影像中心,稱框標中心(Fiducial Center,FC)。理論上,框 標中心和像主點應為同一點,實際上仍有偏差量應進行改正。 3. 透鏡畸變差 這是由於相機鏡頭為球面透鏡,投射光線通過鏡頭發生折射現象, 造成影像變形而無法投射在像點正確的位置。主要分為輻射透鏡畸 變差(Radial Lens Distorsion)和離心透鏡畸變差(Decentric Lens Distorsion)。
2.3.2.2 外方位參數
相片之外方位(Exterior Orientation)用以重建攝影時,透視投影中心 在物空間坐標系統之位置及姿態,包含物空間的位置參數(XO,YO,ZO),以 及姿態為三軸旋轉角(ω,φ,κ),藉由六個參數進行描述。
2.3.2.3 共線條件式 數學上物點、像點及透視投影中心之關係,可用共線條件式(Collinearity Condition Equations)來表示,其方程式如下: 𝑥𝑎 − 𝑥𝑜 = −𝑓𝑚11(𝑋𝐴−𝑋𝑂)+𝑚12(𝑌𝐴−𝑌𝑂)+𝑚13(𝑍𝐴−𝑍𝑂) 𝑚31(𝑋𝐴−𝑋𝑂)+𝑚32(𝑌𝐴−𝑌𝑂)+𝑚33(𝑍𝐴−𝑍𝑂) (式 2.21) 𝑦𝑎 − 𝑦𝑜 = −𝑓𝑚21(𝑋𝐴−𝑋𝑂)+𝑚22(𝑌𝐴−𝑌𝑂)+𝑚23(𝑍𝐴−𝑍𝑂) 𝑚31(𝑋𝐴−𝑋𝑂)+𝑚32(𝑌𝐴−𝑌𝑂)+𝑚33(𝑍𝐴−𝑍𝑂) (式 2.22) 其中,x𝑎, 𝑦𝑎:a 點之影像坐標 x𝑝, 𝑦𝑝:像主點偏移量 f:相機焦距長 𝑋𝐴, 𝑌𝐴, 𝑍𝐴: 點物空間坐標 𝑋𝑂, 𝑌𝑂, 𝑍𝑂:投影中心之物空間坐標 𝑚11~𝑚33:旋轉矩陣 之元素 旋轉矩陣 R 為三軸旋轉角ω,φ,κ之函數,如 = [ 𝑚11 𝑚12 𝑚13 𝑚21 𝑚22 𝑚23 𝑚31 𝑚23 𝑚33] (式 2.23: = [ 𝑚11 𝑚12 𝑚13 𝑚21 𝑚22 𝑚23 𝑚31 𝑚23 𝑚33] (式 2.23) 其中,𝑚11 = 𝑐𝑜𝑠𝜑𝑐𝑜𝑠𝜅 𝑚12 = 𝑠𝑖𝑛𝜔𝑠𝑖𝑛𝜑𝑐𝑜𝑠𝜅 + 𝑐𝑜𝑠𝜔𝑠𝑖𝑛𝜅 𝑚13 = −𝑐𝑜𝑠𝜔𝑠𝑖𝑛𝜑𝑐𝑜𝑠𝜅 + 𝑠𝑖𝑛𝜔𝑠𝑖𝑛𝜅 𝑚21 = −𝑐𝑜𝑠𝜑𝑠𝑖𝑛𝜅 𝑚22 = −𝑠𝑖𝑛𝜔𝑠𝑖𝑛𝜓𝑠𝑖𝑛𝜅 + 𝑐𝑜𝑠𝜔𝑐𝑜𝑠𝜅 𝑚23 = 𝑐𝑜𝑠𝜔𝑠𝑖𝑛𝜑𝑠𝑖𝑛𝜅 + 𝑠𝑖𝑛𝜔𝑐𝑜𝑠𝜅
𝑚31 = 𝑠𝑖𝑛𝜑 𝑚32 = −𝑠𝑖𝑛𝜔𝑐𝑜𝑠𝜑 𝑚33 = 𝑐𝑜𝑠𝜔𝑐𝑜𝑠𝜑 2.3.3 空中三角測量 空中三角測量(Aerial Triangulation)是依據像點坐標來決定該點之物 空間坐標的作業程序,利用影像匹配的方式,接著空三平差解算。 影像匹配(Image Matching)是利用兩張影像的訊號相關函數或是人工 的方式,判定影像點的相似性,並判斷為共軛點(conjugate point)。可依採 用人工量測或是自動化匹配。 2.3.4 數值地形模型
數值地形模型(Digital Terrain Model,DTM)一詞的出現是在 1950 年 代末期,電子計算機萌芽的時代,由美國麻省理工學院土木系所提出。後 來在測繪領域內則出現的不同的名詞:
1. 數值地形模型(Digital Terrain Model,DTM)
任何以數值或數位的方式,用以表現地表特性的資料,包含下列的 DEM 及 DSM。
2. 數值高程模型(Digital Elevation Model,DEM)
利用數值或數位的方式,表現出不含地表植被或人工構造物之地球 表面自然起伏的模型。
用以表現地形的資料格式可分為三種: 1. 規則網格(Regular Grid Network)
即對地面的取樣方式為一垂直正交的網格,在每個網格中紀錄其 XY 坐標和地形高程屬性(X,Y,H)。
2. 不規則三角網(Triangulate Irregular Network,TIN)
依地形的複雜程度擷取具有代表性的特徵點,依特徵點圍成連續的 三角面來表現地形起伏。
3. 數值等高線(Digital Contour-Base Network)
即傳統地圖的等高線,由一連串的離散點以(X,Y,Z)來表現地形。 DEM 應用的領域除了在土木工程的土方計算、斷面圖繪製、地表坡度 及坡向計算等,還有淹水區分析、地形導航、三維飛行模擬等各式用途。
2.3.5 正射影像 正射投影(Orthographic Projection)為地表上任一點均垂直投影於參考 面的投影方法,如圖 2.19 所示,左為正射投影,右為透視投影,正射投影 影像中不存在高差位移及傾斜位移,但是一般像片採用透視投影則反之。 正射影像則是以連續色調的像片取代地圖的表現方式。幾何校正的步 驟包含選取控制點、轉換函數求解及重新取樣。影像正射化採用前述共線 條件式作為轉換函數,利用最小二乘法平差後,用雙線性內插作為產製正 射影像。 圖 2.19 正射投影及透視投影示意圖