國立臺灣大學電機資訊學院生醫電子與資訊學研究所 碩士論文
Graduate Institute of Biomedical Electronics and Bioinformatics College of Electrical Engineering & Computer Science
National Taiwan University Master Thesis
功能性電刺激應用於膝關節前十字韌帶之復健 Application of Functional Electrical Stimulation in
Anterior Cruciate Ligament Rehabilitation
侯政宏
Jheng-Hong Hou
指導老師:賴金鑫 教授
郭德盛 名譽教授 Advisor:Jin-Shin Lai, Professor
Te-Son Kuo, Professor Emeritus 中華民國 99 年 6 月
June, 2010
I
II
誌謝
在短短的研究生生活中有太多太多的感謝想說,首先要誠摯地感 謝我的指導老師郭德盛教授以及賴金鑫主任對於學生不厭其煩的諄 諄教誨,讓學生能夠有正確的研究方向,賴主任的寶貴建議讓學生能 夠適時解決醫學及工程領域的困惑,郭老師平時不斷的提醒也讓學生 受益匪淺。另外更要感謝我的口試委員陳適卿主任、陸哲駒博士、陳 友倫教授的撥冗指導並給予學生寶貴的意見,使得學生的論文能夠更 加完整嚴謹。
研究的日常生活裡,實驗室裡的夥伴扮演著非常重要的角色,
感 謝俊凡學長不厭其煩的教導我電機工程的學識以及動物實驗的技 巧,並對我展現出莫大的耐性
。感謝士維願意與我一同分享學習的 成果,在碩士求學過程中互相砥礪。
穎聰在許多大大小小的事情上 都給予我很好的建議及幫助。感謝易軒在這篇碩論中提供的莫大協 助,如果沒有易軒,這篇碩論也無法順利完成。感謝賴薇與芳宸的 陪伴與鼓勵,讓我在這段人生中,有了滿滿的回憶。
非常謝謝你們!最後,謹將本論文獻給我最敬愛的家人,給予我不虞匱乏的生活 及照顧,老爸、老媽,您辛苦了!再次感謝所有關心及幫助過我的師 長、同學、朋友們,願與你們分享這份榮耀及喜悅。
III
摘要
運動傷害常見之前十字韌帶斷裂會造成股四頭肌萎縮以及膝關 節活動不穩定等情形。為避免患者在進行股四頭肌等速肌力訓練時產 生脛骨前移的現象,本研究開發一套結合功能性電刺激之回授系統用 以取代制式防脛骨前移裝置,以解決先前相關訓練效果不彰的現象。
該回授系統之工作原理係利用等速肌力訓練儀所提供之角度、角速 度、及力矩等信號做為膝關節屈肌電刺激強度與模式之根據,藉由屈 肌適度的收縮以補償伸展時前十字韌帶的拉扯進而防止脛骨前移,以 提高伸肌自主運動之復健訓練效果。
透過自行開發之側錄攝影裝置可觀察到受試者於股四頭肌等速 肌力訓練時,使用功能性電刺激不但可達到與制式防脛骨前移裝置相 似之防脛骨前移功效,且能改善先前膝關節活動範圍受限及力矩平順 度減少的現象。此一系統將有助於運動員在受到類似傷害後能以最有 效的復健方式提早回復到受傷前的最佳狀態。
關鍵字:前十字韌帶、功能性電刺激器、脛骨前移、膕肌、股四頭肌
IV
Abstract
Rupture of anterior cruciate ligament (ACL) in knee is a common sports injury which may cause knee instability and quadriceps atrophy. In order to prevent anterior translation of the tibia during isokinetic training exercises of the quadriceps, a feedback system incorporating functional electrical stimulation (FES) is implemented to replace conventional anti-shear devices. The feedback system modulates FES parameters according to angle position, angle velocity, and torque signals acquired from the isokinetic dynamometer system to induce moderate contractions of the hamstrings to compensate ACL dysfunction and to avoid anterior translation of the tibia during voluntary exercises of the quadriceps. The restriction of tibial anterior translation induced by the feedback system is confirmed by image processing techniques of captured knee joint images during quadriceps contractions, while better results in terms of range of motion and smoothness of torque curves were measured as compared to the conventional device. This new FES system will accelerate functional recovery of quadriceps in athletes who suffer from rupture of ACL by facilitating more efficient rehabilitation exercises of their quadriceps muscles.
Key words: anterior cruciate ligament, functional electrical stimulation, tibial translation, hamstring, quadriceps
V
目錄
誌謝 ... II
摘要 ... III
Abstract ... IV
目錄 ... V
圖目錄 ... VII
表目錄 ... IX
第一章 前言與簡介 ... 1
1-1 前十字韌帶生理解剖構造、其損傷機制、及重建手術後復健 ... 1
1-2 前十字韌帶損傷之術後復健 ... 3
1-2-1 等長收縮訓練、等張收縮訓練、及等速收縮訓練 ... 3
1-2-2 閉鎖動力鏈運動與開放動力鏈運動... 5
第二章 系統內容與整合 ... 9
2-1 等速肌力訓練儀 ... 9
2-2 功能性電刺激器 ... 9
2-3 等速肌力訓練儀與功能性電刺激器之整合 ... 12
第三章 系統評估方法 ... 16
3-1 以等速肌力訓練儀本身所產生之信號進行評估 ... 16
3-2 以相關肌群之肌電圖信號進行評估 ... 17
3-3 以標記影像信號判斷脛骨位移 ... 17
第四章 臨床試驗結果 ... 22
4-1 最大力矩值、總功、及膕肌/股四頭肌強度比值 ... 22
4-2 對應力矩之肌電圖信號 ... 28
4-3 標記影像所產生之脛骨位移數據 ... 33
VI
第五章 討論 ... 34
5-1 依據力矩資訊解釋相關表現 ... 34
5-2 依據肌電圖資訊解釋相關表現 ... 35
5-3 依據標記影像資訊解釋相關表現 ... 35
5-4 功能性電刺激所可能引發之交互抑制作用與韌帶肌肉保護性反射 ... 37
第六章 結論與未來工作 ... 39
參考文獻 ... 40
附錄 ... 42
台大醫工部功能測試及電性安全評估檢驗合格證明 ... 42
等速肌力訓練儀使用手冊 ... 43
國立台灣大學醫學院附設醫院 B 研究倫理委員會之臨床試驗許可書 ... 49
VII
圖目錄
圖 1-1、前十字韌帶於膝關節的位置 ... 2
圖 1-2、於關節活動範圍所產生之力矩強度(左) 以及等速肌力訓練與等張肌力訓練肌力 輸出百分比之差異(右) ... 4
圖 1-3、閉鎖式動力鏈運動之踏車系統(左)與開放式動力鏈運動之等速肌力復健系統(右) ... 6
圖 1-4、被動預防脛骨前移的機械裝置(左)與一般使用之固定裝置(右) ... 7
圖 1-5、使用一般固定裝置(左)以及使用機械性預防脛骨前移裝置(右) ... 8
圖 2-1、本研究團隊自行研發之功能性電刺激器 ... 10
圖 2-2、自製功能性電刺激器於 23Hz、30Hz、50Hz、70Hz 所輸出之非對稱雙相波 .. 10
圖 2-3、自製功能性電刺激器人機介面 ... 11
圖 2-4、電極貼片位置 ... 12
圖 2-5、結合等速肌力訓練儀(動力計)與功能性電刺激器之復健系統方塊圖 ... 13
圖 2-6、經由信號擷取盒所取得之等速肌力訓練儀角度位置信號(上)、力矩信號(中)以及 角速度信號(下),其中力矩信號包括股四頭肌伸展與膕肌屈曲交互呈現 ... 14
圖 2-7、前十字韌帶於主動與被動可動範圍內所承受之張力值 ... 15
圖 2-8、依膝關節角度決定電刺激介入時間點 ... 15
圖 3-1、本研究所使用之肌電圖擷取裝置 ... 17
圖 3-2、以標記攝影方式判斷脛骨位移時標記貼紙所在位置 1)股骨內側髁,2)脛骨內側 髁 ... 18
圖 3-3、本研究所開發之標記攝影系統 ... 19
圖 3-4、標記攝影系統之擺設 ... 19
圖 3-5、影像分析過程包括尋找標示點、確認標示點、及計算標示點間的距離 ... 20
圖 3-6、膝關節於 60 度時,六次伸展動作之脛骨前移量 ... 20
圖 3-7、膝關節於 40 度時,六次伸展動作之脛骨前移量 ... 21
圖 3-8、膝關節於 20 度時,六次伸展動作之脛骨前移量 ... 21
圖 4-1、受試者 1 於三種訓練模式下之力矩強度值 ... 24
圖 4-2、受試者 2 於三種訓練模式下之力矩強度值 ... 25
圖 4-3、受試者 3 於三種訓練模式下之力矩強度值 ... 26
圖 4-4、受試者 4 於三種訓練模式下之力矩強度值 ... 27
圖 4-5、受試者 1 於三種訓練模式下之伸展力矩強度值 ... 29
圖 4-6、受試者 2 於三種訓練模式下之伸展力矩強度值 ... 30
圖 4-7、受試者 5 於三種訓練模式下之伸展力矩強度值 ... 31
圖 4-8、配戴本研究之電刺激器進行等速肌力訓練時,膕肌肌電信號受干擾之情形 ... 32
VIII
圖 4-9、本研究自行開發之標記攝影系統所取得之脛骨位移值(畫素)與膝關節角度的關係 (左:未配戴任何防脛骨前移配件;右:配戴制式防脛骨前移裝置)其相互之間的關係 33 圖 5-1、前十字韌帶於膝關節各角度所承受之張力值 ... 36 圖 5-2、圖示伸展屈曲動作主動肌與拮抗肌之相互關係 ... 37 圖 5-3、膝關節相關肌群拮抗作用示意圖 ... 38
IX
表目錄
表 1-1、膝關節閉鎖式動力鏈運動及開放式動力鏈運動之比較 ... 5 表 4-1、受試者 1 於三種訓練模式下伸展與屈曲之最大伸展力矩值、最大屈曲力 矩值、伸展力矩總功、屈曲力矩總功、及膕肌/股四頭肌強度比值之平均值±標準 差及對應之變異係數... 24 表 4-2、受試者 2 於三種訓練模式下伸展與屈曲之最大伸展力矩值、最大屈曲力 矩值、伸展力矩總功、屈曲力矩總功、及膕肌/股四頭肌強度比值之平均值±標準 差及對應之變異係數... 25 表 4-3、受試者 3 於三種訓練模式下伸展與屈曲之最大伸展力矩值、最大屈曲力 矩值、伸展力矩總功、屈曲力矩總功、及膕肌/股四頭肌強度比值之平均值±標準 差及對應之變異係數... 26 表 4-4、受試者 4 於三種訓練模式下伸展與屈曲之最大伸展力矩值、最大屈曲力 矩值、伸展力矩總功、屈曲力矩總功、及膕肌/股四頭肌強度比值之平均值±標準 差及對應之變異係數... 27 表 4-5、受試者 1、2、及 5 於三種訓練模式下伸展動作之肌電圖最大峰對峰值之 平均值±標準差 ... 32
1
第一章 前言與簡介
1-1 前十字韌帶生理解剖構造、其損傷機制、及重建手術後復健
膝 關 節 主 要 韌 帶 包 括 前 十 字 韌 帶 (anterior cruciate ligament, ACL)、後十字韌帶(posterior cruciate ligament, PCL)、內側副韌帶 (medial collateral ligament, MCL)、以及外側副韌帶(lateral collateral ligament, LCL) [1],其中前十字韌帶以及後十字韌帶位於股骨(femur) 和脛骨(tibia)間,呈交叉十字狀(如圖 1-1 所示),因此得其名[2]。於上 述韌帶當中,部分或完全斷裂的情形好發於前十字韌帶,其主要的功 能是限制脛骨相對於股骨向前位移(anterior translation)。除此之外,
前 十 字 韌 帶 也 能 夠 減 少 脛 骨 相 對 於 股 骨 旋 轉 以 及 膝 關 節 內 翻 (inversion) 或 外 翻 (eversion) 的 應 力 , 並 提 供 調 節 螺 旋 機 轉 的 機 制 (screw-home mechanism),進而避免超出正常活動幅度[1]。其中螺旋 機轉主要由脛骨和股骨的接合面所導引,當膝關節由屈曲(flexion)動 作到伸展(extension)動作時,前十字韌帶張力開始慢慢增加,使得脛 骨隨著前十字韌帶的張力而外轉,故當膝關節彎曲在任何角度時,前 十字韌帶中總有一部分的纖維仍然維持一定的張力,其目的是為了要 維持此角度下膝關節的穩定度。
2
圖 1-1、前十字韌帶於膝關節的位置(依“Color atlas of anatomy: a photographic study of the human body.”(6th ed.) Fig.73.8, Fig.73.9[3]轉製)
前 十 字 韌 帶 損 傷 的 情 形 主 要 分 為 三 種 , 分 別 為 : 過 度 伸 展 (hyperextension) 、 脛 骨 外 旋 轉 (external rotation) 以 及 過 度 屈 曲 (hyperflexion)[1],其中以第一種情形之過度伸展最常發生,尤其是在 激烈運動當中,股骨前側受到激烈撞擊時,前十字韌帶可能過度拉扯 而產生斷裂或損傷的現象。
雖然近年來之前十字韌帶重建手術能夠經由微小鏡頭及纜線引 導(arthroscopic)避免較大手術傷口[4],但不論遭遇前十字韌帶斷裂後 是否進行重建手術,原則上均需配合長期的復健訓練才能恢復原來之 肌力狀態。其中復健訓練之成果好壞將決定患者恢復的時程,這對於 必須在短時間內回到運動場的頂尖運動員來說極為重要[5]。
3
1-2 前十字韌帶損傷之術後復健
1-2-1 等長收縮訓練、等張收縮訓練、及等速收縮訓練
膝關節等長(isometric)收縮的訓練方式是指在訓練過程當中,肌 肉長度維持在一特定長度進行訓練,或者是膝關節角度維持在某特定 角度進行訓練;膝關節等張(isotonic)收縮訓練則指在一活動範圍時,
膝關節肌肉承受固定的張力值;膝關節等速(isokinetic)收縮訓練則是 在訓練的過程當中,訓練動作的速度是維持固定的,意即儀器所給予 的阻力值會根據受試者肌力而有所變化,當受試者能達到儀器預設速 度時,儀器會給予受試者適當阻力使得運動速度能夠維持在一預設值
[6]。此三種訓練方式皆已廣泛運用在膝關節復健訓練上,等長收縮 訓練能夠依特定角度(30 度、60 度、90 度等)進行靜態的動作訓練,
故在安全考量上較不像動態運動模式容易在訓練過程中再度使得韌 帶發生斷裂的意外。然而,這樣的訓練方式與日常生活中的動作較不 一致,訓練的成果將非常有限。等張收縮訓練雖屬於動態動作的訓練 方式,但為遷就前十字韌帶在膝關節各運動角度所能承受最大張力值 而必須選擇一最低張力值作為訓練標準以避免在訓練過程當中再度 發生斷裂等傷害,因此無法使得膝關節相關肌群在不同膝關節角度得 到最佳的訓練效果[7]。等速收縮訓練則改良此兩種模式之缺點,讓 復健訓練符合動態運動的訓練方式,亦能讓膝關節在不同的角度下依
4
不同的肌力表現得到不同的阻力。在一定的角速度訓練下,只要使用 者產生越大的力量則等速肌力訓練儀將相對提供越大的抵抗,使得整 體訓練過程能夠在一預設之特定角速度下進行,以達到最佳訓練成 效。
如圖 1-2 左圖所示,膝關節在一般活動範圍內(range of motion,
ROM),其肌力強度會在不同角度對應不同之最大力矩值。因此,在 等速肌力訓練以及等張肌力訓練兩種訓練過程中不同的肌力輸出百 分比會呈現如圖 1-2 右圖所表示之差異[7]。由此可知,等速肌力訓練 於不同之 ROM 均可產生 100%的肌力輸出。
圖 1-2、於關節活動範圍(range of motion, ROM)所產生之力矩強度(左) 以及 等速肌力訓練與等張肌力訓練肌力輸出百分比之差異(右) (圖式依 Davies GJ, “A compendium of isokinetics in clinical usage and rehabilitation techniques” (2nd ed.) Fig.1-2, Fig.1-6[7]轉製)
雖然等速肌力訓練有較好之訓練成效,但受限於等速肌力訓練下 特定運動模式所伴隨的問題,於實際應用上仍有許多急待克服之處,
其內容將詳述於下文中。
5
1-2-2 閉鎖動力鏈運動與開放動力鏈運動
一般來說,膝關節復健就訓練模式另可分為閉鎖式動力鏈運動 (CKCE: closed kinetic chain exercise)與開放式動力鏈運動(OKCE:
open kinetic chain exercise)兩種訓練模式,其定義上的差別是以受試 者腳底部是否承受阻力來做區分。CKCE 訓練模式指的是受試者在復 健訓練過程中,腳底部受到來自舉凡地板或踏板的反作用力;相反 的,OKCE 訓練模式則在沒有這些作用力的情形下進行復健訓練。兩 者在復健醫學上皆已行之有年,且於多項研究中皆表示具有類似之成 效[8-10]。
在施行閉鎖式動力鏈運動時,腳底部所承受阻力相當於在遠端給 予一固定作用,相較於開放式動力鏈運動讓遠端肢體不受限制的情 形,閉鎖式動力鏈運動相對較為安全。然而,由於閉鎖式動力鏈運動 受限於腳底部必須有承受阻力之運動模式,故其運動形態往往無法和 開放式動力鏈的運動型態相比而各有其優缺點(表 1-1)。
表 1-1、膝關節閉鎖式動力鏈運動(CKCE)及開放式動力鏈運動(OKCE)之比較 閉 鎖 式 動 力 鏈 運 動
(CKCE)
開 放 式 動 力 鏈 運 動 (OKCE)
安全性 腳底部所承受阻力相當
於遠端之固定作用,故相 對較安全
由於遠端肢體運動不受 限制,故相對較不安全
訓練方式 受限於腳底部必須承受
阻力之運動模式
運動模式較不受限
6
CKCE 訓練模式通常是以登階或踏車(圖 1-3 左)等方式來施行,
而 OKCE 訓練模式的訓練則較多樣化,包括了各式抬腿、踢腿、或 再以沙包綁腿增加阻力等方式進行。在 CKCE 訓練模式下,由於肢 體會受限於硬體的架構(階梯、踏車等設備),故無法針對特定肌肉進 行訓練。相反的,使用 OKCE 訓練模式則可以針對特定肌群做訓練 以提高特定肌群的訓練成效。其中等速肌力訓練儀(圖 1-3 右)即是針 對特定肌群而設計的 OKCE 訓練裝置,不過也因為如此,等速肌力 訓練儀所提供之訓練也伴隨了所有 OKCE 訓練模式之缺點。最明顯 的情形就是當前十字韌帶受損或斷裂後,於 OKCE 訓練模式下脛骨 向前位移的情形[8, 10]。由於脛骨前移會造成生理上的疼痛進而影響 訓練成果,故此類的復健訓練常常必須延後至開刀後三個月的時間,
以待膝關節穩定度提升至一定程度後方能實施。如此不但錯過一般復 健上的黃金時期,更可能導致更多相關肌群的萎縮。
圖 1-3、閉鎖式動力鏈運動之踏車系統(HASOMED GmbH)(左)與開放式動力 鏈運動之等速肌力復健系統(HUMAC NORM)(右)
7
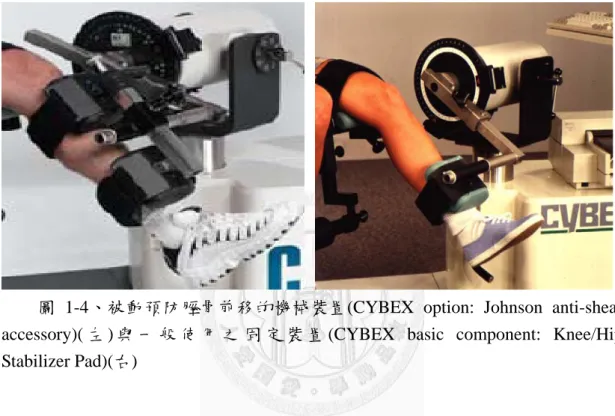
因此,為能夠及早以等速肌力訓練儀進行有效率之訓練,市面上 提供了一套被動預防脛骨前移的機械性裝置(圖 1-4 左)用以改善在使 用一般固定裝置(圖 1-4 右)時所產生的脛骨前移現象。
圖 1-4、被動預防脛骨前移的機械裝置(CYBEX option: Johnson anti-shear accessory)( 左 ) 與 一 般 使 用 之 固 定 裝 置 (CYBEX basic component: Knee/Hip Stabilizer Pad)(右)
8
然而,使用此預防脛骨前移裝置所得到之力矩值常常呈現不正常 之改變趨勢(圖 1-5 右所示之 10 至 40 度之間),故在臨床判讀上將會 面臨許多問題以致於無法正確評估膝關節等速肌力訓練之成效。有鑑 於此,本研究欲另開發一預防脛骨前移裝置用以同時改善脛骨前移以 及力矩值不正常等情形,並期待能夠以類似穿戴一般固定裝置的方式 (圖 1-4 右),安全的達到等速肌力訓練之成果。
圖 1-5、使用一般固定裝置(左)以及使用機械性預防脛骨前移裝置(右)
9
第二章 系統內容與整合
相較於傳統之機械性預防脛骨前移裝置,本研究提供以功能性電 刺激器為基礎之主動式預防脛骨前移裝置。其中等速肌力訓練之主要 肌群為產生膝關節伸展(extension)之股四頭肌(quadriceps),而所將施 予 電 刺 激 用 以 補 償 前 十 字 韌 帶 功 能 之 肌 群 則 為 產 生 膝 關 節 屈 曲 (flexion)之膕肌(hamstring),此系統之內容與整合方式分述如下。
2-1 等速肌力訓練儀
本研究使用台大醫院復健部之 CYBEX NORM 等速肌力訓練 儀,而所搭配之制式防脛骨前移裝置(Johnson anti-shear accessory)係 以物理性的抵擋方式限制脛骨前移量,此等速肌力訓練儀與配件之詳 細解說可參考附錄 2。
2-2 功能性電刺激器
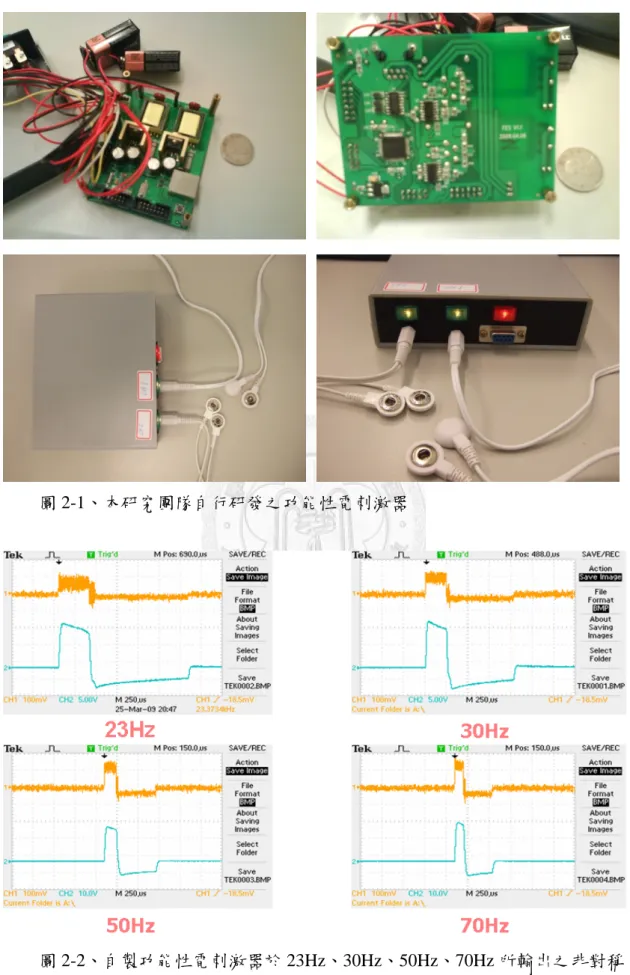
有別於市售之功能性電刺激器必須採用手動旋鈕方式調整電流 輸出強度、介入時間點、刺激的時間長短與頻率等參數,本研究採用 實驗室所開發之自製功能性電刺激器(圖 2-1),並以非對稱雙相波(圖 2-2)提供有效且安全之刺激波形。
10
圖 2-1、本研究團隊自行研發之功能性電刺激器
圖 2-2、自製功能性電刺激器於 23Hz、30Hz、50Hz、70Hz 所輸出之非對稱 雙相波
11
此外,該自製功能性電刺激器採用 LabVIEW 圖形化介面(圖 2-3) 提供工程與臨床人員進行各種修改及控制作業,以便在使用上能夠選 擇以手動或自動等方式調變振幅、頻率、脈波寬度、刺激時間、及頻 道序列排程等參數。
圖 2-3、自製功能性電刺激器人機介面
此自製功能性電刺激器已通過台大醫院醫工部功能測試與電性 安全檢測,未來除了可應用於一般復健醫療用途外亦可應用於臨床研 究中(如本研究),其相關電路與檢測文件詳列於附錄 1。
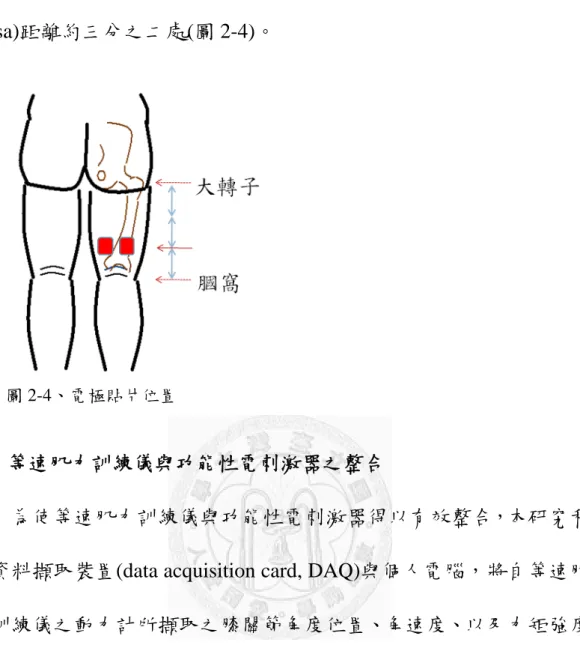
本研究於實際執行臨床試驗時,電刺激貼片(大小:1.5” x 2.0”) 將 擺 放 於 膕 肌 肌 腹 位 於 大 轉 子 (greater trochanter)至 膕 窩 (popliteal
12 fossa)距離約三分之二處(圖 2-4)。
圖 2-4、電極貼片位置
2-3 等速肌力訓練儀與功能性電刺激器之整合
為使等速肌力訓練儀與功能性電刺激器得以有效整合,本研究利 用資料擷取裝置(data acquisition card, DAQ)與個人電腦,將自等速肌 力訓練儀之動力計所擷取之膝關節角度位置、角速度、以及力矩強度 等信號進行電腦運算,再以一相對應值產生電刺激強度以便有效控制 膕肌收縮,進而補償前十字韌帶損傷後對脛骨前移之影響。其中個人 電腦所進行之各類型可適性運算應以減少脛骨前移以及產生該特定 角度最大之膝關節力矩強度為主要目的。以下將根據圖 2-5 之方塊圖 耦合關係解釋系統工作原理。
13
圖 2-5、結合等速肌力訓練儀(動力計)與功能性電刺激器之復健系統方塊圖
如圖 2-5 所示,本等速肌力復健系統係利用膝關節伸展或屈曲動 作產生之角度位置、角速度、力矩強度、以及肌電(electromyography,
EMG)等信號(分別經由動力計與肌電圖電路擷取而得),經過信號擷 取盒以 2000Hz 之取樣頻率進行類比至數位轉換(analog-to-digital
convert, ADC),產生可儲存及處理之資料(圖 2-6),再透過個人電腦計 算用以控制自製功能性電刺激器之參數,進而誘發膕肌適度的收縮以 補償前十字韌帶之功能,並回授影響膝關節伸展或屈曲動作產生之角 度位置、角速度、力矩強度、以及肌電等信號。
14
圖 2-6、經由信號擷取盒所取得之等速肌力訓練儀角度位置信號(上) 、力矩 信號(中)、以及角速度信號(下),其中力矩信號包括股四頭肌伸展與膕肌屈曲交 互呈現
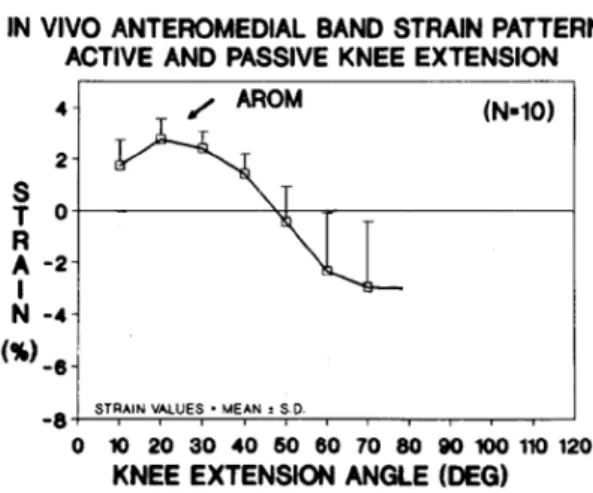
其中電刺激時間點與強度係根據參考文獻[11]所提供各個角度前 十字韌帶張力平均值(圖 2-7)而設定。該文獻指出,前十字韌帶於膝 關節伸展至約 10~48 度時將承受較高的張力而處於伸長的狀態。為避 免前十字韌帶斷裂或經過重建手術之病患在復健的訓練動作當中於 此一範圍內再次受到傷害或甚至發生斷裂的情形,本研究所開發之系 統設定以膝關節伸展至 60 度時做為開始電刺激的起始點(如圖 2-7 所 示,韌帶張力開始急劇增加),直到伸展至 0 度之極限才停止電刺激,
在屈曲的過程當中則不給予電刺激(圖 2-8)。
15
圖 2-7、前十字韌帶於主動與被動可動範圍內所承受之張力值[11]
圖 2-8、依膝關節角度決定電刺激介入時間點
由於每位受試者的肌膚阻抗不盡相同,在每次進行實驗之前都必 須先為受試者量測有反應的最低電壓值 Vmin、舒適範圍最高電壓值
Vmax、以及相對應之肌力伸展最大力矩值,當受試者在伸展訓練過程 中達到該最大力矩強度時即給予最大電壓 Vmax 強度之電刺激。電刺 激電壓大小將會依所測得之力矩強度而有所變化,因此本研究亦另外 設計多組不同的電刺激參數以便能提供膕肌最適當的電刺激量。
16
第三章 系統評估方法
為評估本研究之等速肌力訓練所搭配之主動式預防脛骨前移裝 置,本系統將以等速肌力訓練儀本身所產生之信號、肌電圖信號、以 及標記影像信號之分析結果,判斷受試者於等速肌力訓練下,A)未配 戴任何防脛骨前移裝置、B)配戴制式防脛骨前移裝置、以及 C)配戴 本研究之功能性電刺激器等三種模式在各項表現之優劣情形。本研究 目前僅針對健康受試者以每秒 60 度角速度進行等速肌力之臨床試 驗。為求客觀性及準確性,上述 A、B、及 C 三種模式將盡可能以隨 機的六種不同組合方式施行
3-1 以等速肌力訓練儀本身所產生之信號進行評估
在一般臨床應用上,等速肌力訓練儀可產生角度位置、角速度、
及力矩強度等數值,以圖形化的方式提供臨床人員判讀,而本研究直 接擷取等速肌力訓練儀動力計所提供之角度位置、角速度、及力矩強 度信號並予以數位化,再分別計算每次伸展或屈曲的最大力矩值、總 功、及膕肌/股四頭肌強度比值(H/Q ratio)[12],以便了解在未配戴任 何防脛骨前移裝置、配戴制式防脛骨前移裝置、以及配戴本研究之功 能性電刺激器時,等速肌力訓練儀本身所產生的信號是否能顯示任何 差異。
17
3-2 以相關肌群之肌電圖信號進行評估
為 配 合 等 速 肌 力 訓 練 儀 之 三 種 模 式 , 本 研 究 以 Biometrics
DataLINK(圖 3-1)同時記錄肌肉電位變化(肌電圖)以確認當膝關節在 伸展或屈曲時,股四頭肌以及膕肌兩者在不同的膝關節活動角度時,
肌肉電位比例上的差異。
圖 3-1、本研究所使用之肌電圖擷取裝置(Biometrics DataLINK)
3-3 以標記影像信號判斷脛骨位移
除上述兩種評估方法,本研究另以自行開發之標記攝影系統,判 斷在等速肌力訓練下脛骨位移之情形。此標記攝影方式係將標示貼紙 分別貼於股骨及脛骨內側髁(medial condyle)(圖 3-2),於試驗過程中以 動態攝錄方式針對標示位置進行拍攝,並將所攝錄之影片擷取、分
18
析、及運算。由於影像處理皆以後處理方式進行,因此為取得明確位 置改變量,可嘗試多種演算法以期能得最佳之判讀結果。
圖 3-2、以標記攝影方式判斷脛骨位移時標記貼紙所在位置:1) 股骨內側 髁,2)脛骨內側髁
如圖 3-3 所示,此標記攝影系統在電腦端開始記錄時,透過信號 擷取裝置(此裝置亦能輸出信號)傳達指令給予一遙控器以便將等速 肌力儀之信號、肌電圖信號、及標記攝影系統之信號予以同步,此功 能係用以避免人為控制下所可能產生的判斷誤差。
19 圖 3-3、本研究所開發之標記攝影系統
為減少動態攝影所產生之誤差,本系統之攝影器材盡可能架設於 固定位置拍攝(圖 3-4),並以標記貼紙的半徑進行正規化之影像分析 動作,以期影像誤差能夠降至最低。
圖 3-4、標記攝影系統之擺設
依據該標記攝影系統所擷取之影像,可經由軟體轉換為影像檔案
20
(.avi)並取得可後處理之圖片檔案(.emf),最後再透過 MATLAB 以 K-Means 的方式判斷標示貼紙中心位置及面積大小等參數以確認標 示距離之改變。如圖 3-5 所示,程式將尋找紅色標示點再分別變更為 可判讀之綠色標示點。圖 3-6~3-8 分別表示六次伸展動作當中膝關節 角度於 60 度、40 度、及 20 度時之脛骨前移量
圖 3-5、影像分析過程包括尋找標示點、確認標示點、及計算標示點間的距 離
圖 3-6、膝關節於 60 度時,六次伸展動作之脛骨前移量(標示於圖中)
21
圖 3-7、膝關節於 40 度時,六次伸展動作之脛骨前移量(標示於圖中)
圖 3-8、膝關節於 20 度時,六次伸展動作之脛骨前移量(標示於圖中)
22
第四章 臨床試驗結果
初步試驗結果將以第三章所述之 A)未配戴任何防脛骨前移裝 置、B)配戴制式防脛骨前移裝置、以及 C)配戴本研究之功能性電刺 激器等三種模式,依等速肌力訓練儀(最大力矩值、總功、及膕肌/股 四頭肌強度比值)、肌電圖、以及標記影像所產生之脛骨位移數據做 分析比較,數值都將以平均值±標準差表示。
4-1 最大力矩值、總功、及膕肌/股四頭肌強度比值
圖 4-1~4-4 揭示四位受試者於既定三種模式下,力矩在時間上之 變化,而表 4-1~表 4-4 則對應於圖 4-1~4-4,列出四位受試者於每一 伸展或屈曲動作(各 5 次)所對應之最大力矩、總功、及膕肌/股四頭肌 強度比值,並以平均值、標準差及變異係數表示。其中伸展(第 1、3、
5、7、9 拋物波形)與屈曲(第 2、4、6、8、10 拋物波形)動作在時間 上交互產生,伸展之最大力矩值則普遍高於屈曲之最大力矩值。
在受試者資料當中(n=4),比較配戴制式防脛骨前移裝置以及配 戴本研究之功能性電刺激器之各項係數時,可發現配戴制式防脛骨前 移 裝 置 之 最 大 伸 展 力 矩 值 的 變 異 係 數 (0.16±0.060) 明 顯 (P=0.024, paired-samples T test)大於配戴本研究之功能性電刺激器之最大伸展 力矩值的變異係數(0.056±0.0078),而配戴制式防脛骨前移裝置之伸
23
展力矩總功的變異係數(0.16±0.079)亦明顯(P=0.03, paired-samples T test)大於配戴本研究之功能性電刺激器之伸展力矩總功的變異係數 (0.054±0.021)。由於受試者有限,故其他數據目前無法看出統計上的 意義。
24
圖 4-1、受試者 1 於三種訓練模式下之力矩強度值,其中伸展(第 1、3、5、
7、9 拋物波形)與屈曲(第 2、4、6、8、10 拋物波形)動作在時間上係交互產生,
且伸展之最大力矩值普遍高於屈曲之最大力矩值
表 4-1、受試者 1 於三種訓練模式下伸展與屈曲之最大伸展力矩值(5 次)、最大屈 曲力矩值(5 次)、伸展力矩總功(5 次)、屈曲力矩總功(5 次)、及膕肌/股四頭肌強 度比值(5 次),之平均值±標準差及對應之變異係數(cv=標準差/平均值),其中以*
號標示有統計上差異之項目(P<0.05)
未配戴任何配件 配戴制式防脛骨
前移裝置
配戴本研究電刺 激器 最大伸展力矩值
(呎-磅)
79±4.3 cv=0.055
64±15 cv=0.24*
61±2.8 cv=0.046*
最大屈曲力矩值 (呎-磅)
58± 1.7 cv=0.029
40± 5.3 cv=0.13
45±2.0 cv=0.044
伸展力矩總功 (呎-磅-度)
4700±390 cv=0.082
4000±1100 cv=0.26*
4000±220 cv=0.055*
屈曲力矩總功 (呎-磅-度)
3900±320 cv=0.083
2500±390 cv=0.15
3000±71 cv=0.024
膕肌/股四頭肌強
度比值(H/Q ratio) 0.74±0.058 0.65±0.096 0.75±0.049
25
圖 4-2、受試者 2 於三種訓練模式下之力矩強度值,其中伸展(第 1、3、5、
7、9 拋物波形)與屈曲(第 2、4、6、8、10 拋物波形)動作在時間上係交互產生,
且伸展之最大力矩值普遍高於屈曲之最大力矩值
表 4-2、受試者 2 於三種訓練模式下伸展與屈曲之最大伸展力矩值(5 次)、最大屈 曲力矩值(5 次)、伸展力矩總功(5 次)、屈曲力矩總功(5 次)、及膕肌/股四頭肌強 度比值(5 次),之平均值±標準差及對應之變異係數(cv=標準差/平均值) ,其中以
*號標示有統計上差異之項目(P<0.05)
未配戴任何配件 配戴制式防脛骨
前移裝置
配戴本研究電刺 激器 最大伸展力矩值
(呎-磅)
53±7.6 cv=0.14
63±9.2 cv=0.16*
70±4.0 cv=0.058*
最大屈曲力矩值 (呎-磅)
40±2.1 cv=0.052
43±2.4 cv=0.056
38±3.0 cv=0.079
伸展力矩總功 (呎-磅-度)
3900±660 cv=0.17
4200±490 cv=0.12*
4700±290 cv=0.063*
屈曲力矩總功 (呎-磅-度)
3100±180 cv=0.058
3100±230 cv=0.074
2800±240 cv=0.086
膕肌/股四頭肌強
度比值(H/Q ratio) 0.76±0.12 0.64±0.067 0.55±0.053
26
圖 4-3、受試者 3 於三種訓練模式下之力矩強度值,其中伸展(第 1、3、5、
7、9 拋物波形)與屈曲(第 2、4、6、8、10 拋物波形)動作在時間上係交互產生,
且伸展之最大力矩值普遍高於屈曲之最大力矩值
表 4-3、受試者 3 於三種訓練模式下伸展與屈曲之最大伸展力矩值(5 次)、最大屈 曲力矩值(5 次)、伸展力矩總功(5 次)、屈曲力矩總功(5 次)、及膕肌/股四頭肌強 度比值(5 次),之平均值±標準差及對應之變異係數(cv=標準差/平均值) ,其中以
*號標示有統計上差異之項目(P<0.05)
未配戴任何配件 配戴制式防脛骨
前移裝置
配戴本研究電刺 激器 最大伸展力矩值
(呎-磅)
56±2.6 cv=0.047
63±10 cv=0.16*
58±3.8 cv=0.065*
最大屈曲力矩值 (呎-磅)
38±3.1 cv=0.08
35±2.9 cv=0.081
31±4.8 cv=0.16
伸展力矩總功 (呎-磅-度)
2800±120 cv=0.04127
2600±450 cv=0.1778*
3700±280 cv=0.07384*
屈曲力矩總功 (呎-磅-度)
2400±220 cv=0.092
1800±110 cv=0.059
2100±180 cv=0.088
膕肌/股四頭肌強
度比值(H/Q ratio) 0.69±0.053 0.69±0.099 0.53±0.083
27
圖 4-4、受試者 4 於三種訓練模式下之力矩強度值,其中伸展(第 1、3、5、
7、9 拋物波形)與屈曲(第 2、4、6、8、10 拋物波形)動作在時間上係交互產生,
且伸展之最大力矩值普遍高於屈曲之最大力矩值
表 4-4、受試者 4 於三種訓練模式下伸展與屈曲之最大伸展力矩值(5 次)、最大屈 曲力矩值(5 次)、伸展力矩總功(5 次)、屈曲力矩總功(5 次)、及膕肌/股四頭肌強 度比值(5 次),之平均值±標準差及對應之變異係數(cv=標準差/平均值),其中以*
號標示有統計上差異之項目(P<0.05)
未配戴任何配件 配戴制式防脛骨
前移裝置
配戴本研究電刺 激器 最大伸展力矩值
(呎-磅)
49±2.1 cv=0.044
63±6.2 cv=0.098*
58±3.3 cv=0.056*
最大屈曲力矩值 (呎-磅)
31±3.4 cv=0.11
36±4.7 cv=0.13
34±2.0 cv=0.058
伸展力矩總功 (呎-磅-度)
2900±120 cv=0.040
3000±250 cv=0.083*
3900±94 cv=0.024*
屈曲力矩總功 (呎-磅-度)
2100±230 cv=0.11
1900±150 cv=0.079
2500±180 cv=0.071
膕肌/股四頭肌強
度比值(H/Q ratio) 0.63±0.075 0.63±0.062 0.59±0.037
28
4-2 對應力矩之肌電圖信號
受試者 1、2、及 5 (受試者 3 與 4 未擷取)在既定三種模式下,經 股四頭肌所測得之肌電圖信號以圖 4-5~4-7 表示之。此外,圖中每一 相對伸展動作之肌電圖最大峰對峰值係以平均值與標準差表列於表
4-5 中。由於電刺激信號會嚴重干擾肌電圖之擷取(本研究之膕肌肌電 圖,圖 4-8),因此此處僅以股四頭肌之肌電信號進行分析。
目前以有限的受試者(n=3)數據無法得到任何統計上的意義,但 由圖表內容可看出力矩強度與肌電圖峰對峰值的正相關趨勢。
29
5 10 15 20
10 20 30 40 50 60 70 80 90
未未未未未未未
股股股股股股(呎·磅)
5 10 15 20
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
6 8 10 12 14 16 18 20 22
10 20 30 40 50 60 70 80 90
未未配配配配配配配配配
股股股股股股(呎·磅)
6 8 10 12 14 16 18 20 22
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
8 10 12 14 16 18 20 22 24
10 20 30 40 50 60 70 80 90
未未配配配配股配配配
股股股股股股(呎·磅)
8 10 12 14 16 18 20 22 24
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
圖 4-5、受試者 1 於三種訓練模式下之伸展力矩強度值(第 1、3、5、7、9 拋 物波形)及其對應之肌電圖信號
30
8 10 12 14 16 18 20 22 24
10 20 30 40 50 60 70 80 90
未未未未未未未
股股股股股股(呎·磅)
8 10 12 14 16 18 20 22 24
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
6 8 10 12 14 16 18 20 22
10 20 30 40 50 60 70 80 90
未未配配配配配配配配配
股股股股股股(呎·磅)
6 8 10 12 14 16 18 20 22
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
6 8 10 12 14 16 18 20 22
10 20 30 40 50 60 70 80 90
未未配配配配股配配配
股股股股股股(呎·磅)
6 8 10 12 14 16 18 20 22
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
圖 4-6、受試者 2 於三種訓練模式下之伸展力矩強度值(第 1、3、5、7、9 拋 物波形)及其對應之肌電圖信號
31
12 14 16 18 20 22 24 26 28
10 20 30 40 50 60 70 80 90
未未未未未未未
股股股股股股(呎·磅)
12 14 16 18 20 22 24 26 28
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
10 12 14 16 18 20 22 24 26
10 20 30 40 50 60 70 80 90
未未配配配配配配配配配
股股股股股股(呎·磅)
10 12 14 16 18 20 22 24 26
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
10 12 14 16 18 20 22 24 26
10 20 30 40 50 60 70 80 90
未未配配配配股配配配
股股股股股股(呎·磅)
10 12 14 16 18 20 22 24 26
0.5 1 1.5 2 2.5 3 3.5 4
股股股股股股股
時時(秒)
股電(伏伏)
圖 4-7、受試者 5 於三種訓練模式下之伸展力矩強度值(第 1、3、5、7、9 拋 物波形)及其對應之肌電圖信號
32
表 4-5、受試者 1、2、及 5 於三種訓練模式下伸展動作之肌電圖最大峰對峰值(5 次)之平均值±標準差 (V, Gain:4950)
肌電圖
最大峰對峰值 未配戴任何配件 配戴制式防脛骨
前移裝置
配戴本研究電刺 激器
受試者 1 3.1±0.050 2.4±0.20 2.9±0.064
受試者 2 1.6±0.35 2.2±0.23 2.4±0.36
受試者 5 2.3±0.085 2.8±0.22 2.5±0.16
圖 4-8、配戴本研究之電刺激器進行等速肌力訓練時,膕肌肌電信號受干擾 之情形
33
4-3 標記影像所產生之脛骨位移數據
利用本研究所開發之標記攝影系統擷取影像可獲得如圖 4-9 之膝 關節角度與脛骨位移值(單位為畫素)之相對關係,其中可看出在未配 戴任何防脛骨前移的配件時(圖 4-9 左),當膝關節伸展至 40 度左右脛 骨位移畫素值會緩緩增加,而到達約 20 度時則開始緩緩減少。然而,
當配戴制式防脛骨前移裝置時(圖 4-9 右),脛骨位移畫素值會緩緩增 加直到膝關節伸展角度到達 20 度左右為止,20 度之後脛骨位移畫素 值僅剩少量的改變。
圖 4-9、本研究自行開發之標記攝影系統所取得之脛骨位移值(畫素)與膝關 節角度的關係 (左:未配戴任何防脛骨前移配件;右:配戴制式防脛骨前移裝置) 其相互之間的關係
34
第五章 討論
功 能 性 電 刺 激 在 臨 床 復 健 上 已 有 許 多 相 關 的 應 用 與 研 究
[13-14],故在學理上,等速肌力訓練與功能性電刺激可有效的整合,
而本研究之特點是利用功能性電刺激觸發膕肌適度的收縮以便補償 前十字韌帶所可能產生的過度拉扯情形。初步成果顯示可藉由此特定 的回授控制方式讓伸展以及屈曲運動穩定且有效率的完成。以下將針 對力矩、肌電圖、標記影像分析、以及功能性電刺激所可能遭遇之設 定問題,分別進行討論。
5-1 依據力矩資訊解釋相關表現
由於相關文獻[15]顯示在等速肌力訓練下,比較未配戴任何防脛 骨前移裝置與配戴制式防脛骨前移裝置之相對應力矩值缺乏實質比 較意義,因此表 4-1~4-4 另外提供了變異係數,即標準差除以平均值,
用以顯示每組數據相對應的穩定性。
很明顯的,所有受試者在配戴制式防脛骨前移裝置時,其最大伸 展力矩值及最大伸展力矩總功之變異係數皆大於配戴本研究之電刺 激器。這代表在配戴制式防脛骨前移裝置時,可能無法在等速肌力訓 練下,以伸展運動的方式產生穩定之最大力矩值。因此,一般十字韌 帶損傷之患者在配戴制式防脛骨前移裝置時,股四頭肌的伸展訓練可
35 能無法穩定且有效的完成。
根據目前的數據可觀察到不論是未配戴任何防脛骨前移裝置、配 戴制式防脛骨前移裝置、或是配戴本研究之功能性電刺激器,其膕肌
/股四頭肌強度比值都接近文獻所表示的數值(約 0.6)[12]。因此,本研 究之既定三種模式對膕肌/股四頭肌強度比值並無明顯影響。
5-2 依據肌電圖資訊解釋相關表現
受限於數據量,表 4-5 無法顯示任何統計上的意義。因此,期待 未來有更多受試者或甚至是十字韌帶損傷患者,能夠進行更深入的測 試以了解在各模式之等速肌力訓練下,肌電圖是否能夠提供任何實質 有效之訊息做為比較與研究之用。
5-3 依據標記影像資訊解釋相關表現
膝關節角度對應之十字韌帶張力值[11] (圖 5-1)與本研究自行開 發之標記攝影系統所取得之股骨與脛骨內踝之相對距離似乎有著相 對應的關係。
36
圖 5-1、前十字韌帶於膝關節各角度所承受之張力值(圖式依 Beynnon, B., et al., The measurement of anterior cruciate ligament strain in vivo. International orthopaedics, 1992. 16(1): p. 1-12., Fig.2-7 [11]轉製)與圖 4-9 攝錄而得之脛骨前移 量極為相似
雖然標記影像之數據分析過程仍在做修正與測試,但由圖 4-9 可 知,利用脛骨位移畫素值(股骨與脛骨內踝之相對距離)可大致推測前 十字韌帶之張力值。於圖 4-9 當中,膝關節自 40 度伸展至約 10 度時,
其脛骨位移畫素值的改變與圖 5-1 前十字韌帶張力值自 40 度伸展至 約 10 度極為相似。此外,圖 4-9 亦顯示在使用制式之防脛骨前移裝 置時,脛骨位移畫素值於特定範圍內(約 0 至 20 度間)會達到一相對 固定值,若同樣將脛骨位移畫素值對應於前十字韌帶之張力值,則代 表在此特定範圍內前十字韌帶之張力值為一相對固定值,意即制式之 防脛骨前移裝置可協助減少前十字韌帶之張力。此結果將有助於證實 本研究所開發之標記攝影系統能夠有效的以非侵入的方式估測前十 字韌帶之張力值。
37
5-4 功能性電刺激所可能引發之交互抑制作用與韌帶肌肉保護性反
射
利用功能性電刺激以補償前十字韌帶功能時,必須著重於膝關節 在伸展運動以及屈曲運動當中主動肌(agonist)以及拮抗肌(antagonist) 的協調訓練。如圖 5-2 所示,在伸展動作時,股四頭肌扮演著主動肌 的角色,膕肌則扮演著拮抗肌的角色。相反的,在屈曲動作時,膕肌 變成主動肌,而股四頭肌則是拮抗肌[16]。
圖 5-2、圖示伸展屈曲動作主動肌與拮抗肌之相互關係
於文獻中指出[17],主動肌與擷抗肌透過 Ia 感覺神經元(Ia sensory
neurons)與 Ia 抑制性中間神經元(Ia inhibitory interneurons),產生交互 抑制作用(reciprocal inhibition)(圖 5-3)。因此,為避免所誘發之膕肌收 縮產生交互抑制作用而影響股四頭肌之等速肌力伸展運動(力矩表 現),本研究之功能性電刺激器盡可能使用低頻(20Hz)與低脈波寬度 (雙相 0.3ms)以減少交互抑制作用產生的機會,因為根據相關文獻表
38
示[18],高頻或較大脈波寬度之電刺激相較於低頻或較小脈波寬度之 電刺激容易誘發 Ia 感覺神經元產生反射作用。
圖 5-3、膝關節相關肌群拮抗作用示意圖[17]
除上述交互抑制作用外,另外需注意的是一般體關節所存在的一 種 韌 帶 肌 肉 保 護 性 反 射 (ligamento-muscular protective reflex) 機 制
[19]。此作用存在於前十字韌帶與膕肌之間,於動態運動時膕肌之反 射性收縮可保護前十字韌帶的過度拉扯。然而,當前十字韌帶發生過 斷裂或損傷後,原先的保護機制將無法正常運作[19]。因此,本研究 之功能性電刺激器必須模擬此保護機制,以取代受損之前十字韌帶。
然而,雖然必須以足夠的電刺激能量使膕肌產生足夠的收縮力量以模 擬受損之韌帶肌肉保護性反射,但仍須避免產生前述之交互抑制作用 (膕肌作用抑制股四頭肌),以獲得最佳之訓練效果。
39
第六章 結論與未來工作
本研究結果顯示,配戴自行研發之功能性電刺激器與制式防脛骨 前移裝置,在等速肌力訓練時,對於預防脛骨前移皆有類似的保護機 制,但卻呈現不同之訓練效果。雖然目前因健康受試者人數不足,其 數據無法達到統計上顯著差異的意義,但未來若能以足夠的前十字韌 帶損傷患者做為臨床試驗對象,預期可獲得更具說服力之成果。目前 已取得國立台灣大學醫學院附設醫院 B 研究倫理委員會之臨床試驗 許可書(倫委會案號:201002029D),待通過衛生署之臨床試驗許可審 核後,則可進行正式之臨床試驗,並依其結果繼續改良研發出一套嶄 新之膝關節前十字韌帶復健系統。
40
參考文獻
1. King, S., D. Butterwick, and J. Cuerrier, The anterior cruciate ligament: a review of recent concepts. The Journal of orthopaedic and sports physical therapy, 1986. 8(3): p. 110-122.
2. Marshall, J., F. Girgis, and R. Zelko, The biceps femoris tendon and its functional significance. The Journal of bone and joint surgery. American volume, 1972. 54(7): p. 1444-1450.
3. Rohen, J., C. Yokochi, and E. Lutjen-Drecoll, Color atlas of anatomy: a photographic study of the human body. 2006: Schattauer Verlag.
4. Tsuda, E., et al., Restoration of anterior cruciate ligament-hamstring reflex arc after anterior cruciate ligament reconstruction. Knee Surgery, Sports Traumatology, Arthroscopy, 2003. 11(2): p. 63-67.
5. Noyes, F., et al., The symptomatic anterior cruciate-deficient knee. Part II: the results of rehabilitation, activity modification, and counseling on functional disability. The Journal of Bone and Joint Surgery, 1983. 65(2): p. 163-174.
6. Anderson, M., et al., The Relationships among Isometric, Isotonic, and Isokinetic Concentric and Eccentric Quadriceps and Hamstring Force and Three Components of Athletic Performance. The Journal of orthopaedic and sports physical therapy, 1991. 14(3): p. 114-120.
7. Davies, G., A compendium of isokinetics in clinical usage:(workshop and clinical notes). 1985: S&S Publishers.
8. Hooper, D., et al., Open and closed kinetic chain exercises in the early period after anterior cruciate ligament reconstruction. The American Journal of Sports Medicine, 2001. 29(2): p. 167-174.
9. Perrin, D., Open chain isokinetic assessment and exercise of the knee. J Sport Rehabil, 1994. 3: p. 245-254.
10. Witvrouw, E., et al., Open versus closed kinetic chain exercises in patellofemoral pain. The American Journal of Sports Medicine, 2004. 32(5): p.
1122-1130.
11. Beynnon, B., et al., The measurement of anterior cruciate ligament strain in vivo. International orthopaedics, 1992. 16(1): p. 1-12.
12. Coombs, R. and G. Garbutt, Developments in the use of the hamstring/quadriceps ratio for the assessment of muscle balance. Journal of Sports Science and Medicine, 2002. 1(3): p. 56-62.
13. Van Boxtel, A., Skin resistance during square-wave electrical pulses of 1 to 10
41
mA. Medical and Biological Engineering and Computing, 1977. 15(6): p.
679-687.
14. Crago, P., et al., The choice of pulse duration for chronic electrical stimulation via surface, nerve, and intramuscular electrodes. Annals of Biomedical Engineering, 1974. 2(3): p. 252-264.
15. Malone, T., Clinical use of the johnson anti-shear device: how and why to use it. The Journal of orthopaedic and sports physical therapy, 1986. 7(6): p.
304-309.
16. Passaro, A., et al., Mechanisms of agonist and antagonist activation in the knee of individuals with anterior cruciate ligament reconstruction: kinetic and eletromyographic study. Acta Ortopedica Brasileira, 2008. 16: p. 117-121.
17. Chalmers, G., Re-examination of the possible role of Golgi tendon organ and muscle spindle reflexes in proprioceptive neuromuscular facilitation muscle stretching. Sports biomechanics/International Society of Biomechanics in Sports, 2004. 3(1): p. 159-183.
18. Baldwin, E., P. Klakowicz, and D. Collins, Wide-pulse-width, high-frequency neuromuscular stimulation: implications for functional electrical stimulation.
Journal of Applied Physiology, 2006. 101(1): p. 228-240.
19. Solomonow, M. and M. Krogsgaard, Sensorimotor control of knee stability. A review. Scandinavian journal of medicine & science in sports, 2002. 11(2): p.
64-80.
42
附錄
台大醫工部功能測試及電性安全評估檢驗合格證明
43 等速肌力訓練儀使用手冊
http://www.csmisolutions.com/
44
45
46
47
48
49
國立台灣大學醫學院附設醫院 B 研究倫理委員會之臨床試驗許可書
![圖 1-1、前十字韌帶於膝關節的位置(依“Color atlas of anatomy: a photographic study of the human body.”(6 th ed.) Fig.73.8, Fig.73.9[3]轉製)](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607953.633619/12.892.144.761.120.715/圖11前十字韌帶於膝關節的位置依ColoratlasofanatomyaphotographicstudyofthehumanbodyFig轉製.webp)
![圖 1-2、於關節活動範圍(range of motion, ROM)所產生之力矩強度(左) 以及 等速肌力訓練與等張肌力訓練肌力輸出百分比之差異(右) (圖式依 Davies GJ, “A compendium of isokinetics in clinical usage and rehabilitation techniques” (2 nd ed.) Fig.1-2, Fig.1-6[7]轉製)](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607953.633619/14.892.140.756.498.883/關節活動範圍所產生之力矩強度以及等速肌力訓練與等張肌力訓練肌.webp)

![圖 5-3、膝關節相關肌群拮抗作用示意圖[17]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607953.633619/48.892.151.746.182.764/圖53膝關節相關肌群拮抗作用示意圖17.webp)
