國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
近景攝影測量輔助技能競賽砌磚職類之評分工作 Assessment Methods of Bricklaying Competitions
Assisted by Close-range Photogrammetry
湯佳豪 Jia-Hao Tang
指導教授:徐百輝 博士 Advisor: Pai-Hui Hsu, Ph.D.
中華民國 108 年 01 月
致謝
三年前,我對「測量」的了解還停留在高職所學的內容。曾經榮獲工科技藝競 賽測量職種第一名的我,對測量感到非常自豪,還記得當時比完賽,我在科裡的佈 告欄海報寫上我是「測量神」的稱號,被科主任訓了一頓,她說她都沒有稱神了,
我怎麼敢這麼驕傲,但我不以為意。直到進入測量組就讀後,開始學習到其他測量 技術,包括攝影測量、資料平差、遙測、GPS、GIS 等。原來我以為的「測量」,
只不過就是「工程測量」,在空間資訊領域中,我所學的測量根本微不足道。三年 來,從土木到測量,一步一步克服困難,我終於畢業了。
在探索測量領域的過程中,十分感謝指導教授徐百輝老師的悉心教導,從論文 題目選定到研究方法改進,老師的提點都使我的研究方向更加明確,外業任務也讓 我學到許多寶貴的測量實務經驗。感謝韓仁毓老師、趙鍵哲老師在課業上的指導,
讓我對不同的專業技術有深入的了解,還有專題討論中一次又一次的問答,使我的 研究問題愈加清晰。感謝學位口試委員黃金聰老師、邱式鴻老師給予許多論文修改 的建議,使我的論文更臻完美。
很幸運能夠與測量組的各位夥伴們相遇,不管是打保齡球、交換禮物、迎新送 舊、組際盃羽球賽桌球賽、動物園、全員逃走中,或是熬夜寫程式、趕著期末報告 又要出外業,因為你們,讓這三年充滿回憶。特別感謝立恒,每一次的外業有你 carry,讓我們都能超前進度提早回家。感謝 RS 組的學長學姊毅俞、湘琳、士誠,
謝謝你們讓我很快地融入測量組這個大家庭。謝謝其他學長學姊們,謝謝 R05 的 同學們,謝謝學弟學妹們,你們讓測量組充滿活潑的氣氛。
一個學期的花蓮高工代理老師是非常特別的經歷,在我研究所最迷惘的時候,
有幸能夠到花蓮工作,暫時拋下研究所的煩惱,開啟嶄新的挑戰。在花工,除了教 導專業科目也分享參與技能競賽的經驗,我不只是一位新手老師,我更像是學生,
我受益良多。這段期間也欣賞許多花蓮美景,不管是山、海、縱谷,各個讓我流連 忘返,花蓮的米更是回味無窮,因此花東成為畢業後我第一個想去度假放鬆的地方。
衷心感謝花工建築科的老師們,冠勛、怡萱、美惠、晏伶、志鴻、寬崇、信美、信 吉、巧雲、筱潔、玉明以及小黑學長,好懷念每周四中午大家一起在會議室吃午餐 聊天,搭配各種私房料理和甜點。離開花蓮前曾許下承諾,要把大家的名字寫在論 文裡,希望用這小小的動力期許自己能夠克服困境完成論文。我做到了。謝謝你們 給我到花蓮的機會,謝謝你們給我歡樂的教師體驗,謝謝你們請我吃好吃的。另外 也謝謝花工的小朋友,你們使我進步、成長。謝謝花蓮。
我的女朋友彥彤,從高中認識妳到大學交往,現在我們要一起從測量組畢業了。
這幾年來,不管是出國比賽、研究所、打電動,生活中的點點滴滴都有妳的陪伴。
難免偶有爭吵,但都一一化解,互相包容。畢業後,我們有著共同的目標,未來的 日子還請妳繼續陪我走下去。我愛妳。
謝謝我的家人,總是支持我想做什麼就做什麼的決定。
謝謝台中高工的老師。
謝謝培訓技能競賽的老師。
謝謝瓦力砌磚的夥伴。
謝謝我的好朋友。
謝謝大合順磚窯廠經理黃英隆提供實驗用的清水紅磚。
湯佳豪 2019.01
摘要
技能競賽是技職教育的年度盛事,砌磚職類更是歷史悠久的競賽項目之一。砌 磚競賽的評分工作主要採人工量測方式,往往耗時費力,且砌磚作品不易保存。近 景攝影測量是一項發展成熟的技術,透過影像密匹配可以生成三維點雲模型,精準 地重建三維場景。本研究應用近景攝影測量輔助砌磚競賽之評分工作,透過建立可 靠的模型坐標系統及控制資訊,搭配適當的拍攝規劃,採用非量測型相機獲取砌磚 作品影像,並以三維建模軟體(ContextCapture)產製高密度點雲資料,最後應用本研 究所開發的點雲量測程序,以半自動化的方式在點雲中進行砌磚作品之尺寸、垂直、
水平、平整度等量測工作。經由實驗評估及測試所提研究方法之可行性,顯示半自 動化的點雲量測確實可以減少人工量測作業,並降低人為因素影響。此外點雲能完 整保存砌磚作品且方便於數位平台展示,亦可作為選手提出成績異議時重新審查 的依據。本研究應用近景攝影測量技術為砌磚競賽提供一項低成本但具有高品質 且提高現有量測作業效率之方案。
關鍵字:技能競賽、砌磚、近景攝影測量、點雲模型
ABSTRACT
Skills competition is an annual event for vocational education, and bricklaying is one of the long-established competitions. The assessment methods of the bricklaying competition mainly adopts the manual measurement method, which is time consuming and laborious, and the brick walls are not easy to save. Close-range photogrammetry is a well-developed technology that can generate 3D point cloud models and accurately reconstruct 3D surface through dense image matching. This study applies the close-range photogrammetry to assist in the scoring of brickwork competitions. By establishing a reliable model coordinate system with control points, and a adequate mission planning, , the non-metric camera is used to obtain numerous overlapping images of the brickwork.
Then the 3D modeling software (ContextCapture) is used to produce the high-density point cloud. Finally the point cloud measurement procedure developed by this study is applied to perform the measurement of the dimension, plumb, level and alignment of the brick walls in the point cloud in a semi-automatic manner. Through the experimental evaluation and testing of the feasibility of the proposed method, it is shown that semi- automated point cloud measurement can indeed reduce manual measurement and reduce the impact of human factors. In addition, the point cloud can completely preserve the brick wall and is convenient for digital platform display, and can also be used as a basis for re-assessment when the competitors raises the objection. This study uses close-range photogrammetry to provide a low-cost but high-quality measurement operations for bricklaying competition with improved efficiency in existing method.
Keywords:Skills competition, Bricklaying, Close-range photogrammetry, Point cloud
目錄
致謝 ... i
摘要 ... iii
ABSTRACT ... iv
目錄 ... v
圖目錄 ... vii
表目錄 ... xi
第 1 章 緒論 ... 1
1.1 前言 ... 1
1.2 研究動機與目的 ... 2
1.3 論文架構 ... 3
第 2 章 技能競賽及砌磚職類介紹 ... 5
2.1 技能競賽 ... 5
2.2 砌磚介紹 ... 7
2.3 砌磚職類競賽方式及評分方法 ... 10
第 3 章 近景攝影測量基本原理 ... 13
3.1 透視投影 ... 13
3.2 像片坐標系統 ... 14
3.3 像片方位參數 ... 15
3.3.1 內方位參數率定 ... 18
3.4 物像對應模式 ... 19
3.5 共線方程式在攝影測量的應用 ... 20
3.6 影像匹配 ... 21
第 4 章 研究方法 ... 23
4.1 建立坐標系統 ... 24
4.2 拍攝規劃 ... 25
4.3 產製點雲 ... 28
4.5 點雲量測 ... 30
4.5.1 尺寸量測 ... 31
4.5.2 垂直度、水平度量測 ... 41
4.5.3 平整度量測 ... 45
4.6 小結 ... 46
第 5 章 實驗及成果分析 ... 47
5.1 實驗配置 ... 47
5.2 影像獲取 ... 49
5.3 實驗一 ... 50
5.3.1 實驗一成果檢核 ... 51
5.4 實驗二 ... 57
5.4.1 產製點雲模型 ... 58
5.4.2 點雲前處理 ... 59
5.4.3 尺寸量測 ... 61
5.4.4 垂直、水平、平整度量測 ... 67
5.4.5 實驗二成果檢核 ... 69
5.5 小結 ... 73
第 6 章 結論與建議 ... 75
6.1 結論 ... 75
6.2 建議 ... 76
參考文獻 ... 77
圖目錄
圖 1-1、地面光達點雲(莊子毅,2012) ... 1
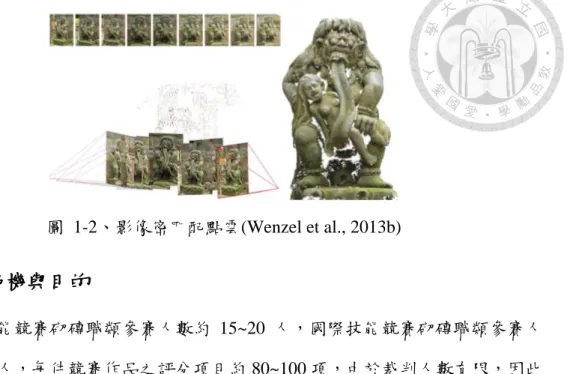
圖 1-2、影像密匹配點雲(Wenzel et al., 2013b) ... 2
圖 2-1、國際技能競賽徽章(WorldSkills, 2019) ... 6
圖 2-2、臺灣近年參加國際技能競賽獲獎情形(王尹伶,2017) ... 6
圖 2-3、磚造街屋 ... 7
圖 2-4、農村合院式建築 ... 7
圖 2-5、鋼筋混凝土加強磚造建築 ... 8
圖 2-6、清水磚裝置藝術 ... 8
圖 2-7、第 43 屆國際技能競賽砌磚試題 ... 10
圖 2-8、尺寸量測位置圖 ... 11
圖 2-9、裁判進行作品量測實況 ... 12
圖 3-1、針孔成像原理示意圖 ... 13
圖 3-2、像片坐標系統(左),影像坐標系統(右) ... 14
圖 3-3、物空間坐標系統 ... 14
圖 3-4、輻射透鏡畸變差與離心透鏡畸變差 ... 15
圖 3-5、輻射透鏡畸變差像點偏移示意圖 ... 16
圖 3-6、像片位置參數(XL, YL, ZL) ... 17
圖 3-7、像片姿態參數(ω, ϕ, κ) ... 17
圖 3-8、(a) PhotoModeler calibration grid(Photomodeler, 2019);(b)Matlab calibration pattern(Bouguet, 2019);(c)OpenCV circle grid pattern(OpenCV dev. team, 2019); (d)iWitness coded targets(iWitnessPRO, 2019) ... 18
圖 3-9、共線條件(修改自 Khalil, 2011) ... 19
圖 3-11、空中三角測量(Moffitt and Mikhail, 1980) ... 21
圖 3-12、影像密匹配產製之三維點雲模型(陳婉婷,2017) ... 22
圖 4-1、研究流程圖 ... 23
圖 4-2、尺度控制及 Z 軸方向控制示意圖 ... 24
圖 4-3、景深範圍示意圖(陳婉婷,2017) ... 27
圖 4-4、攝影站配置示意圖 ... 27
圖 4-5、ContextCapture 產製點雲模型流程 ... 28
圖 4-6、Lab 色彩空間 ... 29
圖 4-7、捲尺量測磚牆長度及高度 ... 30
圖 4-8、水準氣泡尺量測磚牆垂直度 ... 30
圖 4-9、由不同數量的平面來表示一塊磚 ... 31
圖 4-10、三平面交會獲得磚塊角點(藍*) ... 34
圖 4-11、建構三角網(林柏丞,2012) ... 34
圖 4-12、建立不規則三角網並找出邊緣點,紅點與藍點皆為磚塊邊緣點,藍點為 欲擬合磚塊頂面之邊緣點 ... 35
圖 4-13、三平面交會 ... 35
圖 4-14、磚塊角點(藍色+) ... 35
圖 4-15、建立不規則三角網並找出邊緣點,紅點與藍點皆為磚塊邊緣點,藍點為 欲擬合磚塊邊線之邊緣點 ... 36
圖 4-16、兩直線(橘線、藍線)交會出磚塊角點(藍+) ... 40
圖 4-17、垂直量測示意圖 ... 43
圖 4-18、屬於灰縫的紅磚點雲 ... 44
圖 4-19、RANSAC 擬合直線,藍點為內群,紅點為離群,離群資料對直線擬合結 果無影響 ... 44
圖 4-20、使用 RANSAC 剔除灰縫部分之紅磚點雲 ... 45
圖 5-1、實驗磚牆之立面圖及平面圖 ... 47
圖 5-2、尺度控制及重力方向控制之配置 ... 48
圖 5-3、攝影站配置 ... 49
圖 5-4、控制點及檢核點佈設 ... 50
圖 5-5、全測站觀測示意圖 ... 55
圖 5-6、量測位置圖 ... 57
圖 5-7、作品 A ... 57
圖 5-8、作品 B ... 57
圖 5-9、作品 A 點雲模型 ... 58
圖 5-10、作品 B 點雲模型 ... 58
圖 5-11、作品 A 點雲裁切成果 ... 59
圖 5-12、作品 A 點雲分群取出紅磚部分 ... 59
圖 5-13、作品 B 點雲裁切成果 ... 60
圖 5-14、作品 B 點雲分群取出紅磚部分 ... 60
圖 5-15、選取欲量測尺寸之兩磚塊角點 ... 61
圖 5-16、以 k-means 將不同法向量之平面分群 ... 61
圖 5-17、三平面交會 ... 62
圖 5-18、磚塊角點(藍+) ... 62
圖 5-19、以 k-means 將不同法向量之平面分群 ... 63
圖 5-20、二平面交會 ... 63
圖 5-21、建立不規則三角網並找出邊緣點,紅點與藍點皆為磚塊邊緣點,藍點為 欲擬合磚塊頂面之邊緣點 ... 64
圖 5-22、磚塊頂面 ... 64
圖 5-23、三平面交會 ... 65
圖 5-25、選取欲量測垂直之點雲(藍) ... 67 圖 5-26、以 RANSAC 剔除灰縫部分之紅磚 ... 67 圖 6-1、皮數桿 ... 76
表目錄
表 2-1、國際技能競賽砌磚職類臺灣歷年獲獎 ... 9
表 2-2、砌磚競賽評分表 ... 11
表 5-1、Canon EOS 650D 規格(參考自 Canon 官方網站) ... 48
表 5-2、Trimble M3 DR2"規格(參考自 Trimble M3 DR Series 使用手冊) ... 48
表 5-3、拍攝規劃 ... 49
表 5-4、檢核點距離 ... 51
表 5-5、尺度約制置於磚牆前方之檢核點距離誤差 (單位:mm) ... 52
表 5-6、尺度約制置於磚牆後方之檢核點距離誤差 (單位:mm) ... 52
表 5-7、重力方向檢核點 CK34、35 之 X、Y 坐標差異及兩點連線與 Z 軸夾角 θ ... 53
表 5-8、技能競賽常見之水平氣泡尺量測精度 ... 53
表 5-9、控制點坐標 ... 54
表 5-10、控制點約制之尺度檢核及重力方向檢核 ... 54
表 5-11、控制點間之距離檢核 ... 54
表 5-12、控制點精度 ... 56
表 5-13、作品 A 點雲量測成果 ... 70
表 5-14、作品 B 點雲量測成果 ... 71
表 5-15、尺寸點雲量測成果與圖說要求比較 ... 72
表 5-16、點雲量測之後驗單位權標準差 ... 72
第1章 緒論
1.1 前言
近年來攝影測量(Photogrammetry)與電腦視覺(Computer Vision)領域相關技術 的整合,使得二維影像透過立體匹配(Stereo Matching)可以快速取得細緻且高精度 之三維點雲(Point Cloud)模型。點雲是以高密度具坐標的點位來描述三維空間資訊,
產製點雲的主要方法有影像密匹配(Dense Image Matching)及光達(LiDAR)。光達利 用主動式雷射掃描技術獲取三維資訊,成果精度高,但設備成本不低,若無同時搭 配光學相機取像將不具色彩資訊,如圖 1-1。隨著電腦軟硬體提升及影像匹配演算 法的改良,利用多角度影像產製密點雲亦逐漸展現其低成本、高精度的優勢,同時 擁有空間資訊及色彩資訊的點雲模型,在視覺上更能貼近真實樣貌,如圖 1-2。現 今影像匹配技術已經廣泛運用在災害調查、邊坡監測、結構體監測、都市計畫、營 建管理、建築古蹟維護、醫學等各種科學領域。
圖 1-1、地面光達點雲(莊子毅,2012)
圖 1-2、影像密匹配點雲(Wenzel et al., 2013b) 1.2 研究動機與目的
全國技能競賽砌磚職類參賽人數約 15~20 人,國際技能競賽砌磚職類參賽人 數約 25~30 人,每件競賽作品之評分項目約 80~100 項,由於裁判人數有限,因此 評分工作往往費時又費力。又因競賽場地限制,砌磚作品通常會在競賽結束後隔天 立即拆除,保存不易的問題使得選手對於成績有異議時,裁判只能檢查評分表是否 有計算錯誤或登錄錯誤,並無法針對作品進行重新量測。然而影像密匹配技術能夠 快速產製品質良好的點雲模型,且數位影像與資料儲存方便的優點,使得砌磚作品 能夠長期保存,隨時檢視。本研究將以影像三維重建為基礎,建立一套半自動化量 測的流程,來輔助技能競賽砌磚職類的評分工作,以期能減少人工量測作業,且降 低人為主觀因素影響評分結果。
1.3 論文架構
本論文依循下列章節進行詳細論述,其各章節內容概要如下:
第一章 緒論
說明本研究之動機與目的,並簡述論文架構。
第二章 技能競賽及砌磚職類介紹
了解技能競賽及砌磚職類之競賽方式。
第三章 近景攝影測量基本原理
敘述本研究相關的近景攝影測量基本原理。
第四章 研究方法
詳論本研究採用的坐標系統約制、拍攝規劃、點雲處理、點雲量測之方法。
第五章 實驗及成果分析
按照研究方法實際進行磚牆量測,驗證其可行性。
第六章 結論與建議
基於本研究獲得之成果提出結論與實務應用之建議。
第2章 技能競賽及砌磚職類介紹
2.1 技能競賽
臺灣自 1968 年開始舉辦第一屆全國技能競賽,每年均辦理競賽,由各職業訓 練機構、職業學校、企業等提名選手參加,目的在促進職業訓練與職業教育發展,
鼓勵學習技能,提高國家技術水準,同時肩負選拔優秀選手參加國際技能競賽的任 務。透過技能競賽增進技術交流、相互觀摩與切磋,促進職業訓練與職業教育之發 展,為技職教育之年度盛事。
為因應經濟快速發展對技術人才之需求,競賽職類亦由最初的 14 職類,增加 至 47 個職類,包括綜合機械、模具、集體創作、機電整合、CAD 機械設計製圖、
CNC 車床、CNC 銑床、冷作(金屬結構製作)、資訊技術(軟體設計)、銲接、外觀模 型創作、建築舖面、汽車板金(打型板金)、板金、配管與暖氣、電子(工業電子)、
網頁設計、電氣裝配(室內配線)、工業控制(工業配線)、砌磚、油漆裝潢(漆作)、石 膏技術與乾牆系統(粉刷)、家具木工、門窗木工、珠寶金銀細工、花藝、美髮(男女 美髮) 、美容、服裝創作、西點製作、汽車技術、西餐烹飪、餐飲服務、汽車噴漆、
造園景觀、冷凍空調、資訊與網路技術、平面設計技術、麵包製作、工業機械修護、
飛機修護、健康照顧、機器人、中餐烹飪、國服、鑄造及應用電子(視聽電子)。
國際技能競賽(WorldSkills Competition)在 1950 年由西班牙發起舉辦,這項被 喻為技職界的「奧林匹克」,是全球最大規模的技能競賽。目前國際技能組織 (WorldSkills International)會員國計有 80 個。國際技能競賽每 2 年舉辦一次,正式 之競賽職類有 50 項,可分為製造及工程技術、建築技術、創意藝術及時尚、資訊 及通訊科技、社會及個人服務、運輸及物流六大類群。參賽選手年齡限制在 22 歲 以下,且不得重複參賽。2015 年參賽選手數突破千位,參賽國 59 個,可見國際技 能競賽愈來愈受各界關注。
1970 年臺灣加入國際技能競賽組織,自第 20 屆國際技能競賽起,每屆均派選 手參賽,成績表現優異,深獲國際間重視。1993 年 32 屆國際技能競賽由臺灣主辦,
於 7 月 19 日至 8 月 2 日在台北舉行。第 43 屆國際技能競賽由巴西主辦,於 2015 年 8 月 11 日至 16 日在聖保羅(São Paulo)舉行,臺灣選派 41 位選手參加 39 職類競 賽,共獲得 5 金 7 銀 5 銅 19 優勝,國家排名世界第三名。近年臺灣參加國際技能 競賽獲獎情形如圖 2-2。
圖 2-2、臺灣近年參加國際技能競賽獲獎情形(王尹伶,2017) 圖 2-1、國際技能競賽徽章(WorldSkills, 2019)
2.2 砌磚介紹
早期的臺灣,紅磚是非常普遍的建築材料。城市裡的街道磚拱成列,打造親切 的騎樓空間,如圖 2-3,紅磚承重牆與木構密梁地板系統塑造二、三層樓的商住街 屋,成為臺灣都市特有風貌。鄉村裡的農戶大多以合院形式搭配木構架系統,紅瓦 屋頂搭配紅磚外牆,塑造台灣農村的建築風格,如圖 2-4。
圖 2-3、磚造街屋 圖 2-4、農村合院式建築
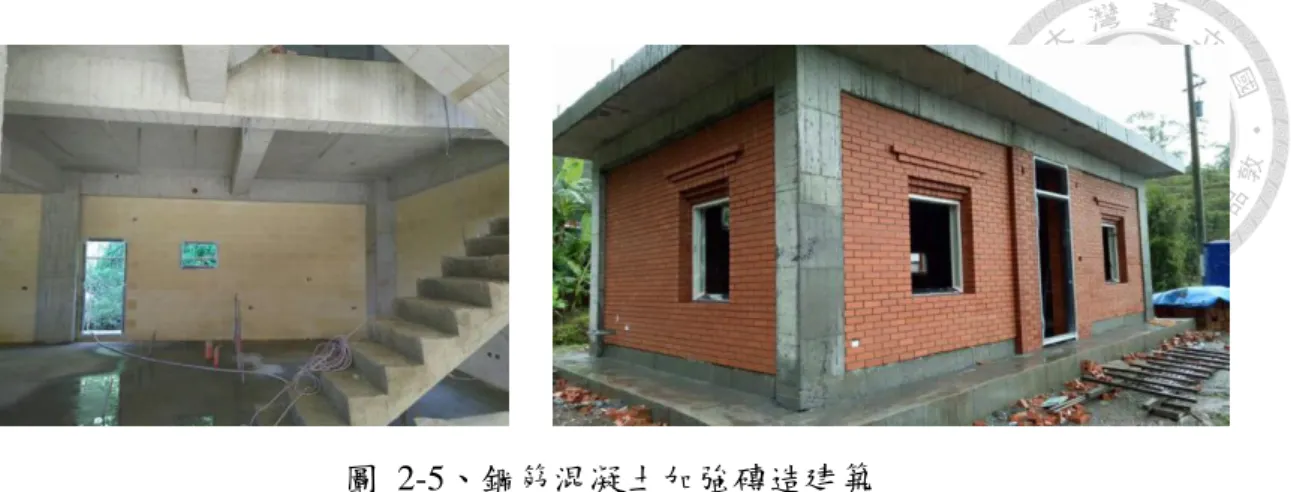
二十世紀初,臺灣建築開始局部採用鋼筋混凝土加固,方式是先砌好磚牆,再 以鋼筋混凝土搭建梁柱以束制磚牆,磚牆仍是承載結構重量與抵抗地震的主體,混 成了「梁柱結構」和「承重牆結構」彼此無法獨立,卻連體相依,互助共生的混血 系統,稱為加強磚造,如圖 2-5。這種構造在外觀上與鋼筋混凝土建築非常相似,
很容易讓人混淆誤會。因為鋼筋混凝土梁柱拆模之後,其粗糙表面須以水泥砂漿粉 光,磚牆也免不了一起被覆蓋的命運。磚造工法從「砌磚」演變成「排磚」,水泥 砂漿以容器倒在整皮磚上,再將紅磚魚貫排列其上,不須精確計算磚牆尺寸,不在 乎灰縫大小是否一致,甚至不填垂直灰縫。當紅磚不再露臉,儘管施工品質下降,
紅磚色澤、強度、尺寸參差不齊,它終將被水泥砂漿包容而不追究。加強磚造工法 不僅在台灣大量使用,在世界各地也屬普遍,但因地制宜的改善,使得磚造建築在 不同地方有了不同的演變。加強磚造的普及並沒有讓台灣的砌磚工藝保留下來。如 今在台灣營建市場上砌傳統清水磚牆的砌磚師傅已是鳳毛麟角。
圖 2-5、鋼筋混凝土加強磚造建築
「清水磚」是指高品質的窯燒紅磚,磚面平整,色澤均勻,尺寸一致,疊砌後 不須以水泥砂漿粉刷。清水磚牆對於施工品質要求極高,水泥砂漿需填滿壓實,灰 縫大小均一,需經過勾縫處理,且注重牆面平整度與清潔。如今清水磚不再是主流 的建築材料,室內設計所使用之磚牆多半也是以仿紅磚陶片取代。台灣紅磚產業消 失的同時,正有一些人努力推動紅磚文化,將清水磚轉型成為藝術,如圖 2-6,期 待創造出不一樣的台灣紅磚特色。
砌磚是技能競賽中歷史悠久的競賽項目之一。競賽內容為清水磚,須依照圖說 砌築各種直線與造型磚牆或圓拱形磚牆等構造,部分牆面水泥砂漿粉刷及地磚鋪 設,且完成牆面清潔及灰縫勾縫處理。臺灣從第 27 屆國際技能競賽開始參加砌磚 職類,自今共獲 2 金 3 銀 9 優勝之成績,如表 2-1。技能競賽為培育及傳承臺灣清 水磚工法的重要角色。
表 2-1、國際技能競賽砌磚職類臺灣歷年獲獎
屆數 姓名 名次 競賽地點
27 屆(1983) 賴榮秋 銀牌 奧地利 28 屆(1985) 黃朝雄 銀牌 韓國
29 屆(1988) 曾智仁 澳洲
30 屆(1989) 陳維崇 優勝 英國 31 屆(1991) 溥原挺 優勝 荷蘭 32 屆(1993) 粘錦成 金牌 臺灣 33 屆(1995) 黃盈嵐 優勝 法國 34 屆(1997) 邱耀慶 優勝 瑞士 35 屆(1999) 黃文慶 優勝 加拿大 36 屆(2001) 林士豪 金牌 韓國 38 屆(2005) 梁皓翔 優勝 芬蘭 39 屆(2007) 施衍至 優勝 日本
40 屆(2009) 郭展昌 加拿大
41 屆(2011) 吳佳諺 英國
42 屆(2013) 許 雍 優勝 德國 43 屆(2015) 湯佳豪 銀牌 巴西
44 屆(2017) 周承誼 優勝 阿拉伯聯合大公國
2.3 砌磚職類競賽方式及評分方法
全國技能競賽同時肩負選拔優秀選手參加國際技能競賽的任務,因此全國技 能競賽方式與規則已逐漸與國際技能競賽接軌。此節介紹之競賽方式及評分方法 將以國際技能競賽為主。
國際技能競賽通常有四天共 22 小時的競賽時程,砌磚職類選手須施作指定的 三個磚牆模組,如圖 2-7,總磚數約 600 塊磚,依照圖說完成磚塊放樣、鋸切、疊 砌、勾縫及牆面清潔等。賽後裁判量測作品進行評分,選出獲勝選手。
圖 2-7、第 43 屆國際技能競賽砌磚試題
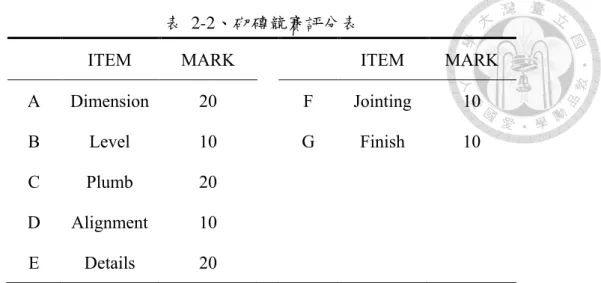
評分項目則有 7 項:尺寸、水平、垂直、直線(平整度)、細部量測、灰縫、完 成度,如表 2-2,分為客觀分數及主觀分數。客觀分數是指尺寸、水平、垂直、直 線、細部量測等,可用捲尺、水準氣泡尺、模板或是其他測量儀器量得作品是否符 合圖說要求。主觀分數則包含灰縫、整潔、美觀、完成度等由裁判心證之項目。
表 2-2、砌磚競賽評分表
ITEM MARK ITEM MARK
A Dimension 20 F Jointing 10 B Level 10 G Finish 10 C Plumb 20
D Alignment 10 E Details 20
客觀分數的評分是裁判依照公告之評分位置圖進行量測,如圖 2-8,實際裁判 量測情形如圖 2-9。每評分點誤差 1 mm 扣 0.1 分直到該評分點所占分數扣完為止。
尺寸量測使用捲尺量得磚牆長度、高度或特定造型的距離。垂直、水平量測利用水 準氣泡尺靠上欲量測位置,使水準氣泡居中後量得磚塊與水準氣泡尺之間的空隙,
以最大空隙作為該評分點扣分。直線量測又可稱為平整度量測,直接以水準尺靠上 欲量測的線段,量得最大縫隙進行扣分。
圖 2-8、尺寸量測位置圖
尺寸、水平、垂直、直線量測佔整體評分項目六成的比重,且評分位置較多,
本研究將著重於輔助尺寸、水平、垂直、直線量測之工作。
圖 2-9、裁判進行作品量測實況
第3章 近景攝影測量基本原理
攝影測量是經由像片紀錄所拍攝物體的反射電磁波,並經影像量測及判讀後獲 得物體及周遭環境之幾何或主題資訊的一種技術。依攝影方式來區分,大致可分為 航空攝影測量(aerial photogrammetry)、地面攝影測量(terrestial photogrammetry)等,
而近景攝影測量(close-range photogrammetry)是拍攝距離較短的攝影測量。相較於 傳統航空攝影測量屬於接近垂直攝影,拍攝到的地物幾乎只有其上端,無法仔細表 現其他複雜部分。近景攝影測量對於同一目標物可於不同角度和方向進行拍攝,完 整涵蓋目標物的細節,且因幾何性增強,使得測量精度大幅提高。同時,商用之非 量測型相機普及,高解析度,價格低廉,配合適當的拍攝規劃及像機率定,亦可得 到良好的成果。近景攝影測量愈來愈展現出經濟性及有效性。以下簡單說明與本研 究相關的近景攝影基本原理及方法。
3.1 透視投影
透視投影的基本幾何原理可由針孔成像方式來說明,如圖 3-1,光線經由物體 反射通過針孔成像在底片面上,成像清晰度則取決於光源強度、物體反射能量、針 孔大小、底片感光度及成像路徑距離等。假設光線為直線行進,則物點(object point)、
透視中心(perspective center)、像點(image point)應位於同一直線上,此三點共線 (collinearity)的特性建構攝影測量解析物像對應的數學函式。(趙鍵哲,2016)
圖 3-1、針孔成像原理示意圖
像點 物點
針孔(透視中心)
底片
3.2 像片坐標系統
像片是以二維空間來記錄三維空間資訊的平面。因此像片中像點坐標可用二 維坐標系統來表示,稱為像空間坐標系統。而攝影站位於三維空間中,紀錄三維空 間資訊,則用來表示此空間中的物點坐標及攝影站位置,稱為物空間坐標系統。
傳統攝影測量以像片框標連線交點作為像點量測之原點,以像片水平方向為 x 軸,垂直方向為 y 軸,稱為像片坐標系統。一般數位相機所得之數位影像並無框 標,但其感光元件基本上是整齊排列,可由像素的行數(column)及列數(row)來量測 像點坐標,以影像左上角為原點,稱為影像坐標系統。即使目前攝影測量所獲取之 影像大多為數位影像,習慣上仍以像片坐標系統來表示像點坐標,如圖 3-2。
圖 3-2、像片坐標系統(左),影像坐標系統(右)
常見的三維坐標系統有直角坐標系統、圓球坐標系統、橢球坐標系統等,但以 三維直角坐標系統最容易了解物點與像點坐標系之間的關係,如圖 3-3。
圖 3-3、物空間坐標系統
3.3 像片方位參數
像片之方位參數是用來表示物點通過透視中心在像片上成像的型態,可分為 內方位參數及外方位參數。
內方位參數包含像主距(principal distance)、像主點(principal point)偏移及透鏡 畸變差。像主距為透視中心至像平面的垂直距離,以 f 表示。像主點為透視中心垂 直投影至像平面的位置,理論上像主點應在像片正中心,但實際上會有些許偏移,
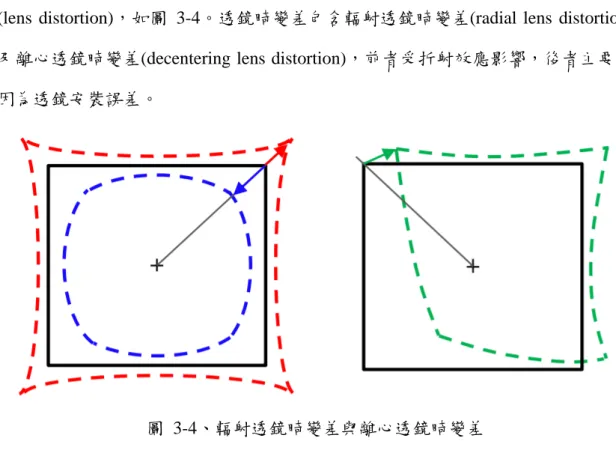
則像主點偏移量以(x0, y0)表示。然而光線經由不同角度穿過透鏡,折射影響造成靠 近影像邊緣的成像點不理想,因此必須進行像點改正,此改正量稱為透鏡畸變差 (lens distortion),如圖 3-4。透鏡畸變差包含輻射透鏡畸變差(radial lens distortion) 及離心透鏡畸變差(decentering lens distortion),前者受折射效應影響,後者主要成 因為透鏡安裝誤差。
輻射透鏡畸變差是由光線折射所引起,與像點至像主點的距離有關,愈接近像 主點位置的像點其光線經過透鏡時受折射影響較少,反之愈遠離像主點位置其光 線折射角度較大,因此成像位置偏移破壞了直線特徵透視投影的不變性。輻射透鏡 畸變差可透過特殊的鏡頭設計來減少光線折射造成的影響,亦可使用數學公式進 行像點坐標改正,輻射透鏡畸變差改正公式如式 3-1(Fryer and Brown, 1986):
圖 3-4、輻射透鏡畸變差與離心透鏡畸變差
∆𝑟 = 𝑘1𝑟1+ 𝑘2𝑟3 + 𝑘3𝑟5 + 𝑘4𝑟7 3-1 其中,𝑟 = √𝑥̅2+ 𝑦̅2,𝑥̅ = 𝑥 − 𝑥0,𝑦̅ = 𝑦 − 𝑦0。
接著可依幾何關係求得像點坐標在 x 方向及 y 方向上的改正量,如式 3-2、圖 3-5:
δ𝑥 =∆𝑟
𝑟 𝑥̅,δ𝑦 =∆𝑟
𝑟 𝑦̅ 3-2
其中,∆𝑟:輻射透鏡畸變差
𝑘1、𝑘2、𝑘3、𝑘4:輻射透鏡畸變差係數 𝑟:像點至像主點的距離
𝑥̅、𝑦̅:像主點為原點之像點坐標 δ𝑥、δ𝑦:像點輻射畸變差改正量
離心透鏡畸變差是由於鏡頭組裝時,鏡片排列中心未能精準對齊,造成成像點 偏移。一般來說輻射透鏡畸變差遠大於離心透鏡畸變差,是破壞透視投影共線特性 的主因之一。離心透鏡畸變差改正公式如式 3-3:
∆𝑥 = (1 + 𝑝3𝑟2 + 𝑝4𝑟4)[𝑝1(𝑟2+ 2𝑥̅2) + 2𝑝2𝑥̅𝑦̅]
∆𝑦 = (1 + 𝑝3𝑟2 + 𝑝4𝑟4)[2𝑝1𝑥̅𝑦̅ + 𝑝2(𝑟2 + 2𝑦̅2)]
3-3
其中,∆𝑥、∆𝑦:像點離心透鏡畸變差改正量 𝑝1、𝑝2、𝑝3、𝑝4:離心透鏡畸變差係數
圖 3-5、輻射透鏡畸變差像點偏移示意圖
外方位參數為(XL, YL, ZL, ω, ϕ, κ),(XL, YL, ZL)用來表示透視中心在物空間中 的坐標,指攝影機曝光時的位置,稱為位置參數,如圖 3-6。(ω, ϕ, κ)表示像片坐 標系統旋轉至物空間坐標系統所需轉動的角度,ω 為繞 x 軸旋轉,ϕ 為繞 y 軸旋 轉,κ 為繞 z 軸旋轉,(ω, ϕ, κ)稱為姿態參數,如圖 3-7。
圖 3-6、像片位置參數(XL, YL, ZL)
圖 3-7、像片姿態參數(ω, ϕ, κ)
3.3.1 內方位參數率定
依相機內方位參數的穩定度可分為量測型相機(Metric Camera)與非量測型相 機(Non-Metric Camera)。量測型相機大多作為專業攝影測量之用,例如航空攝影測 量,其鏡頭、感光元件、及相機內部構造較非量測型相機更為精密,此類相機一般 透過實驗室以高精度的相機率定器(Camera Calibrator)進行相機內方位參數率定,
並提供詳細的率定報告作為後續物像對應的轉依據。然而市面上常見的數位相機 屬於非量測型相機,其透鏡與感光元件等構件之精度皆較量測型相機差,且無實驗 室之率定報告,因此再進行攝影測量工作前必須自行完成相機率定的工作。雖然非 量測型相機內方位參數較不穩定,且具有較大的透鏡畸變差,但經過適當率定之非 量測型相機仍可獲取相當高精度的影像。(Wolf and Dewitt, 2000;鄒芳諭,2010)
一般非量測型相機之內方位參數率定大多使用率定場法或自率光束法。率定 場法是透過佈設精確量測的控制點,且考慮控制點幾何分佈,來反算內方位參數。
自率光束法則是以多張重疊影像量測分佈均勻的連結點,利用共線條件同時求解 相機內、外方位參數以及連結點物空間坐標。目前已有許多相機率定軟體,透過拍 攝特殊設計的率定模板,軟體自動化辨識模板標點,簡化非量測型相機的率定程 序。常見的相機率定軟體有PhotoModeler、Camera Calibration Toolbox for Matlab、
OpenCV、iWitness 等,其不同軟體之率定版如圖 3-8。
(a) (b) (c) (d)
圖 3-8、(a) PhotoModeler calibration grid(Photomodeler, 2019);(b)Matlab calibration pattern(Bouguet, 2019);(c)OpenCV circle grid pattern(OpenCV dev. team, 2019);
(d)iWitness coded targets(iWitnessPRO, 2019)
3.4 物像對應模式
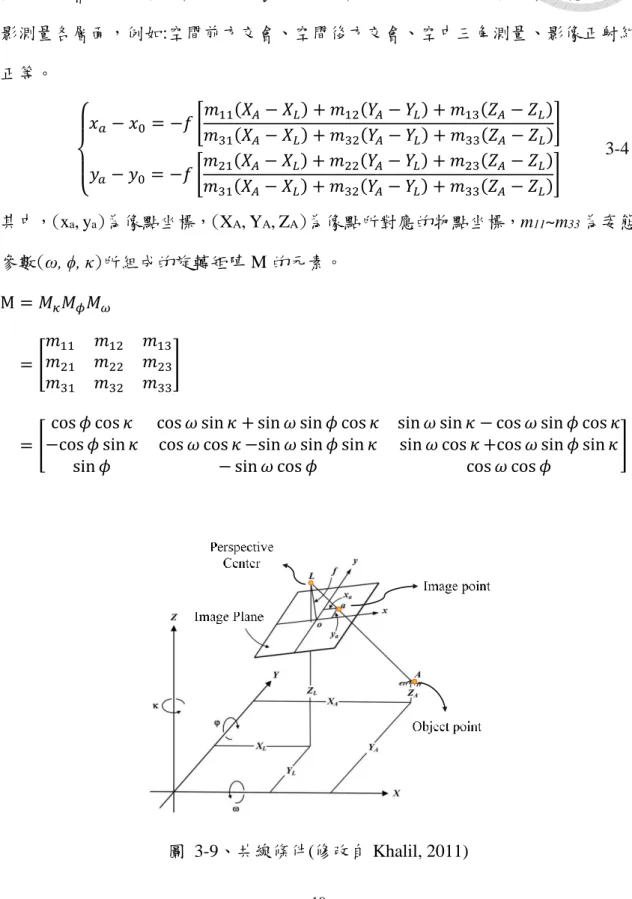
攝影成像的幾何性質是基於透視投影的原則,物點、透視中心、像點應在同一 直線上,稱為共線條件(Collinearity Condition),如圖 3-9。共線條件廣泛應用在攝 影測量各層面,例如:空間前方交會、空間後方交會、空中三角測量、影像正射糾 正等。
{
𝑥𝑎− 𝑥0 = −𝑓 [𝑚11(𝑋𝐴 − 𝑋𝐿) + 𝑚12(𝑌𝐴− 𝑌𝐿) + 𝑚13(𝑍𝐴 − 𝑍𝐿) 𝑚31(𝑋𝐴 − 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿)] 𝑦𝑎 − 𝑦0 = −𝑓 [𝑚21(𝑋𝐴− 𝑋𝐿) + 𝑚22(𝑌𝐴− 𝑌𝐿) + 𝑚23(𝑍𝐴 − 𝑍𝐿)
𝑚31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴 − 𝑍𝐿)]
3-4
其中,(xa, ya)為像點坐標,(XA, YA, ZA)為像點所對應的物點坐標,m11~m33為姿態 參數(ω, ϕ, κ)所組成的旋轉矩陣 M 的元素。
M = 𝑀𝜅𝑀𝜙𝑀𝜔
= [
𝑚11 𝑚12 𝑚13 𝑚21 𝑚22 𝑚23 𝑚31 𝑚32 𝑚33]
= [
cos 𝜙 cos 𝜅 cos 𝜔 sin 𝜅 + sin 𝜔 sin 𝜙 cos 𝜅 sin 𝜔 sin 𝜅 − cos 𝜔 sin 𝜙 cos 𝜅
−cos 𝜙 sin 𝜅 cos 𝜔 cos 𝜅 −sin 𝜔 sin 𝜙 sin 𝜅 sin 𝜔 cos 𝜅 +cos 𝜔 sin 𝜙 sin 𝜅 sin 𝜙 − sin 𝜔 cos 𝜙 cos 𝜔 cos 𝜙
]
圖 3-9、共線條件(修改自 Khalil, 2011)
前述共線條件是基於理想得成像條件下,實際成像路徑因受鏡頭畸變差、底 片變形、大氣折光差及地球曲率差影響。近景攝影測量通常不考慮大氣折光差及 地球曲率差,使用數位相機亦可忽略感測器變形因素,則實際成像點偏移主要來 自透鏡畸變差,為了消除系統誤差可將透鏡畸變差之像點改正量加入共線式中進 行像點精化,以符合共線條件,如式 3-5。
{
𝑥𝑎− 𝑥0+ δ𝑥 + ∆𝑥 = −𝑓 [𝑚11(𝑋𝐴− 𝑋𝐿) + 𝑚12(𝑌𝐴 − 𝑌𝐿) + 𝑚13(𝑍𝐴− 𝑍𝐿) 𝑚31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿)] 𝑦𝑎− 𝑦0+ δ𝑦 + ∆𝑦 = −𝑓 [𝑚21(𝑋𝐴− 𝑋𝐿) + 𝑚22(𝑌𝐴 − 𝑌𝐿) + 𝑚23(𝑍𝐴 − 𝑍𝐿)
𝑚31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴 − 𝑌𝐿) + 𝑚33(𝑍𝐴 − 𝑍𝐿)] 3-5
3.5 共線方程式在攝影測量的應用
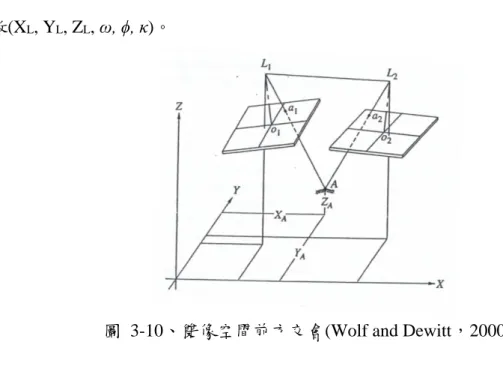
共線方程式是解析攝影測量物像對應的基礎方程式,式中每個元素都可以作 為測量的對象,例如在已知兩張像片內外方位參數下,量測影像中相對應的物點坐 標,由此兩空間中的直線交會即可求解物點之三維空間坐標,此方法為攝影測量之 空間前方交會(space intersection),如圖 3-10。如單像片中包含三個以上已知三維 空間坐標之像點,則可利用空間後方交會(space resection)求得像片之六個外方位參 數(XL, YL, ZL, ω, ϕ, κ)。
圖 3-10、雙像空間前方交會(Wolf and Dewitt,2000)
在多張像片下量測重疊區域連結點並搭配少量控制點,在共線條件約制下利 用光束法區域平差(bundle block adjustment)一併求解多張像片之外方位參數及連結 點三維坐標,此方法稱為空中三角測量(aerial triangulation),如圖 3-11。空中三角 測量也可以進行相機率定,將未知的內方位參數代入光束法平差中同時求解,稱為 自率光束法區域平差(self-calibrating bundle block adjustment)。
共線方程式在攝影測量的應用相當廣泛,其他包含正射影像製作等,本文將不 再詳述。
圖 3-11、空中三角測量(Moffitt and Mikhail, 1980) 3.6 影像匹配
影像匹配(Image Matching)是透過影像灰階值或幾何特徵,在兩幅或多幅影像 間搜尋相互對應的點位,稱為共軛點(conjugate points)。藉此利用前方交會法獲得 三維空間資訊。影像匹配方法大致可分為區域式匹配(Area-based Matching)及特徵 式匹配(Feature-based Matching)。區域式匹配透過搜尋罩窗計算灰階值的相關性找 出共軛點,常見的方法有標準互相關法(Normalized Cross-Correlation Matching)及 最小二乘匹配法(Least-Squares Matching)。然而區域是匹配容易受到影像尺度變化 及視角不同的影響,造成共軛點匹配錯誤,此時特徵式匹配將優於區域式匹配,常 見的特徵式匹配方法有尺度不變特徵轉換(Scale-Invariant Feature Transform)、加速 穩健特徵(Speeded Up Robust Features)。
影像密匹配是攝影測量發展的主軸之一,透過多張重疊影像,逐像元匹配 (pixelwise matching),取得細緻的三維空間資訊,如圖 3-12。Hirschmüller(2005)提 出的半全域匹配法(Semi-Global Matching,SGM),大幅減少全域匹配法的計算量,
且提升可靠度,密匹配成果更優於光達點雲。攝影測量成為獲取三維空間資訊經濟 且方便快速的一種方法。
圖 3-12、影像密匹配產製之三維點雲模型(陳婉婷,2017)
第4章 研究方法
本研究的目標是以非量測型相機獲取砌磚作品影像,產製高密度三維點雲模型,
以利後續進行模型評分量測工作。本研究工作包含三個主要項目,一為產製高密度 點雲模型,為了確保每件作品模型應有相近的品質,因此需制定合適的坐標系統約 制及拍攝規劃,以完整重建三維場景。二為點雲模型前處理,包括磚牆點雲裁切及 紅磚與灰縫點雲的分群,獲得僅有磚塊的點雲模型。三為點雲量測方法,將著重於 尺寸、水平、垂直、平整度量測。研究流程如圖 4-1,以下將依序詳述。
圖 4-1、研究流程圖
4.1 建立坐標系統
砌磚競賽評分主要以捲尺及水準氣泡尺作為量測工具,尺寸量測是由裁判使 用捲尺量得磚牆長度、高度或特定尺寸,在點雲模型中則可以兩點三維坐標計算出 距離,因此模型需有良好的尺度控制。垂直及水平使用水準氣泡尺進行量測,然而 水準氣泡是依靠重力來獲得垂直及水平的依據,因此需建立可靠的重力方向基準。
本研究以尺度及重力方向基準作為建立坐標系統的兩個要素,如圖 4-2。尺度 控制以測量專用之標尺作為尺度約制條件。重力方向基準以垂球的原理架設兩點 連線平行於重力方向之控制點,並以兩控制點方向作為 Z 軸,建立卡式坐標系統。
然而模型量測只需考慮單一模型中各點位的相對關係,不須與其他模型進行比較,
因此每個作品都是獨立的坐標系統,但有著相同的尺度及 Z 軸方向。
圖 4-2、尺度控制及 Z 軸方向控制示意圖
4.2 拍攝規劃
攝影規劃是攝影測量工作最重要的作業,目的是為了完整重建場景,且有良好 的品質。Wenzel et al.(2013b)提出針對近景攝影測量影像獲取的建議及相機設定,
以下是幾項 Wenzel et al.提出的建議:
確保有 80%的影像重疊率
確保每個區塊至少能夠出現在 3 張影像中
針對複雜的表面適當縮小像基距
每個相機站從不同高度獲取影像
較低的 ISO,較快的快門速度,較小的光圈
確保場景有足夠的光源
本研究設計一個適合砌磚競賽使用的攝影規畫流程。首先決定地面取樣距離 (ground sample distance, GSD),地面取樣距離是指像片中單一像元對應到物空間的 距離,是用來衡量影像解析度的重要指標。本研究使用 Bentely ContextCapture 作 為產製點雲模型之軟體,此軟體提供之影像獲取手冊中提及模型的相對精度 P 為 (ContextCapture, 2019):
𝑃=3 × 𝐺𝑆𝐷 4-1
然而砌磚競賽量測的最小單位為 1 mm,因此 GSD 須小於 1/3 mm。接著決定像片 解析度(C×R pixel),令磚牆高度為 H,磚牆在像片中的比例為 S,S 是確保像片能 夠涵蓋整個磚牆高度以及周圍之坐標系統配置,可取 0.6~0.8 左右,依下式計算像 片最小列數(Rmin),根據 Rmin選擇相機適當的像片解析度:
𝑅𝑚𝑖𝑛× 𝐺𝑆𝐷 ≥𝐻
𝑆 4-2
為了維持磚牆在像片中的比例為 S,鏡頭焦距與拍攝距離成正比,選用長焦距 的鏡頭雖然能降低透鏡畸變差的影響,但拍攝距離也就需要越長,考慮競賽場地相 鄰作品之間的距離決定適合之拍攝距離之後,依下式計算鏡頭焦距 f:
𝑓 =𝑍 × 𝑝𝑖𝑥𝑒𝑙𝑠𝑖𝑧𝑒
𝐺𝑆𝐷 4-3
像基距(base line)是指相鄰攝影站之間的距離,又可稱基線長。基線航高比是 指航空攝影測量中兩相鄰曝光站之間的距離,與飛機航高(flight height)之比值,簡 稱基高比。基高比在航測中代表的物理意義是兩像片前方交會的交會角度,基高比 小,則交會角度小,則在高程方向精度較差。在近景攝影測量中,航高改為拍攝距 離,因此稱基線物距比更為合適。理想中幾何性最佳的交會角度為 90∘,然而實 際上將出現兩像片間幾何變形過大及出現大量遮蔽點位,因此實務上以提高攝影 站數及重疊率,增加交會光線的多餘觀測數來提高精度。像基距 B 可由影像重疊 率 a 來推算,一般影像密匹配重疊率至少達 80 %:
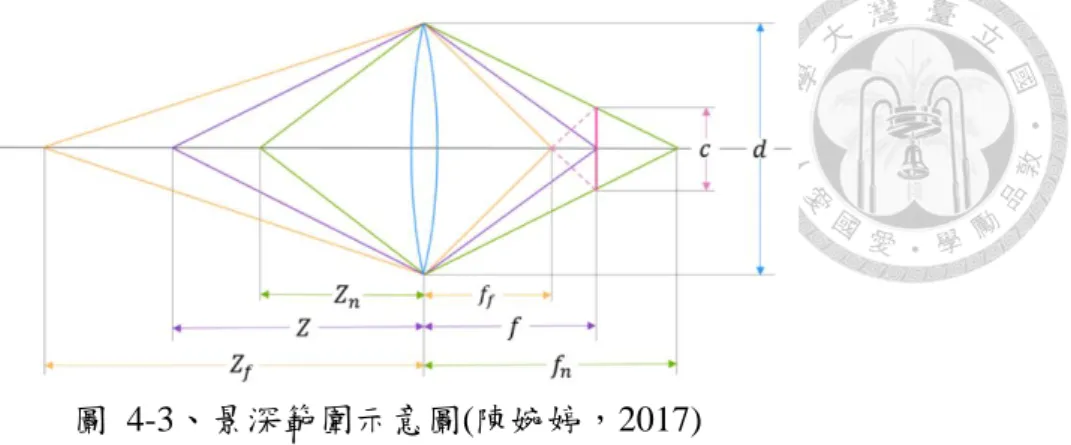
B = C × GSD × (1 − a) 4-4 當相機對焦於某一點時,其他點位會產生模糊圓(circle of confusion),距離對 焦點越遠其模糊圓越大,若模糊圓夠小,則可視為一個的點,在對焦點沿物距方向 前後會有一個可接受的清晰範圍,稱為景深(depth of field)。景深範圍如圖 4-3,可 由最近的對焦距離 Zn及最遠的對焦距離 Zf來表示。(Mikhail et al., 2001)
𝑍𝑛 = 𝑍 × 𝑓2
𝑓2+ (𝑍 − 𝑓) × 𝑐 × 𝑁 𝑍𝑓 = 𝑍 × 𝑓2
𝑓2− (𝑍 − 𝑓) × 𝑐 × 𝑁
4-5
其中,c 為模糊圓直徑,一般使用 0.1 mm(何維信,1995),N 為 f-number,焦距和 光圈的比值,數位相機通常以 f-number 來表示光圈大小,若焦距固定,f-number 越 大光圈越小,景深範圍也越大。
圖 4-3、景深範圍示意圖(陳婉婷,2017)
然而影像清晰度仍受場景照明度、相機快門速度、感光度 ISO 等因素影響,
因此實務上應確保場景光線充足,避免使用高感光度,若快門速度過長則可搭配腳 架使用,綜合調整確保影像清晰。
完成拍攝參數規劃之後需決定攝影站數,假設磚牆長度為 L,磚牆高度為 H,
磚牆長度決定延基線方向需要幾張相片才能涵蓋,若影像重疊率為 a,影像行數為 C,像基距 B,則相機站數 SC如下式:(⌈ ⌉表示上取整函數)(陳婉婷,2017)
𝑆𝐶 = ⌈𝐿 − 𝐶 × 𝐺𝑆𝐷 × 𝑎
𝐵 + 3⌉ 4-6
然而 SC是指磚牆正面所需拍攝站數,磚牆側面及上面也需完整重建,由於砌磚競 賽之磚牆通常為 1b 厚度(b:砌磚用語,表示整磚長度),側面的面積通常遠小於正 面,為了確保每個區域至少都被三張影像拍攝,因此可以磚牆兩側角落為圓心,拍 攝距離為半徑,分別增加數個測站,以利完整重建側面部分。磚牆頂部則提高拍攝 高度,增加第二個拍攝航帶,使用由上往下的角度拍攝,拍攝高度以能夠拍到磚牆 頂部為考量。整體攝影站配置如圖 4-4。
圖 4-4、攝影站配置示意圖
4.3 產製點雲
目前市面上許多軟體皆能自動解算像片方位,並產製高密度點雲,例如:Agisoft PhotoScan、Pix4Dmapper、VisualSfM 等。Bentely ContextCapture 是款測繪業界常 用的影像密匹配軟體之一,具有快速產製高精度及高密度點雲模型的能力,產製成 果擁有精細的紋理細節及銳利的邊緣,高品質及高效能的特性使得 ContextCapture 在製作大範圍的數值地表模型或是小區域的三維場景重建表現都相當出色。本研 究採用 ContextCapture 來做為像片方解算及產製磚牆三維點雲模型的軟體,相機內 方位參數率定則在像片方位重建程序中以自率光束法區域平差的方式解算。產製 點雲模型之流程如圖 4-5。
4.4 點雲前處理
點雲模型產製完成後即可進行模型量測的工作,本研究以 MATLAB 撰寫點雲 前處理及點雲量測的程式。由 ContextCapture 產製出的點雲模型可能包含許多背 景,這些背景資訊在點雲量測中並不會使用到,因此需將磚牆點雲裁切分割出來,
除了可降低不必要的點雲數量,提升程式運算效能,也對後續處理有很大的幫助。
在點雲模型中量測垂直、水平、平整度,可以選取兩點間欲量測之點雲區塊,
進行平面擬合,接著計算點雲與平面的距離來獲得該線段的垂直、水平及平整度。
由於實際競賽評分只量測磚塊與水準氣泡尺之間是否貼其吻合,並不考慮灰縫凹 入所造成的間隙,因此在點雲擬合至平面前,需事先剔除灰縫點雲。然而紅磚與灰 縫最明顯的差異在於顏色,使用 k-means clustering 針對點雲的色彩資訊進行分群,
圖 4-5、ContextCapture 產製點雲模型流程 匯入影像
建立尺度控 制及Z軸方
向控制
空中三角測 量重建像片
方位
密匹配產製 高密度點雲
匯出點雲及 品質報告
k-means clustering 是分割式分群法中,最基本的演算法,其主要目標是要在大 量的資料點中找出具有代表性的資料點,這些資料點可以稱為是群中心(cluster centers),然後在根據這些群中心,進行資料壓縮、資料分群等處理。
透過事先設定群集的數量 k,初步將資料點分為 k 群,重新計算資料群中心,
更新資料點所對應之分群,不斷迭代計算,最終使得所有資料點𝑥𝑗與其群中心𝑢𝑖之 距離平方合為最小,達成資料分群的目的(Arthur and Vassilvitskii, 2007)。
𝐽 = ∑ ∑ (𝑥𝑗− 𝑢𝑖)2
𝑥𝑗∈𝑆𝑖 𝑘
𝑖=1
4-7
點雲模型的色彩資訊通常以 RGB 顏色模型來表示,但使用 RGB 色彩資訊進 行 k-means 分群時,可能受到光線明亮度影響造成分群結果不理想,無法順利將紅 磚及灰縫區分出來,因此可將 RGB 轉換至 Lab 色彩空間(Lab color space)。Lab 色 彩空間被設計用來貼近人類視覺,人的肉眼能感知的色彩都能通過 Lab 模型表現 出來,它的全域(gamut)超過 RGB 和 CMYK 色彩空間。Lab 色彩空間是一個三維 色彩模型,L 表示亮度,a 代表紅色到綠色之間的位置,b 代表黃色到藍色之間的 位置,如圖 4-6,所有顏色就以這三個值來組成,不受顯示器等設備影響,為一種 絕對色彩空間。因此將 RGB 轉換至 Lab 色彩空間,以 a、b 兩個色彩資訊進行 k- means 分群,即可避免因亮度造成的顏色差異,可精準將紅磚及灰縫分群。
圖 4-6、Lab 色彩空間
4.5 點雲量測
本研究著重的砌磚評分項目為尺寸、垂直、水平、平整度量測。在砌磚競賽中,
尺寸量測是由裁判使用捲尺量得磚牆長度、高度或特定距離,如圖 4-7。由於點雲 模型中任何一點皆帶有一組三維坐標,選取兩點坐標即可計算兩點距離。為了能夠 準確選取磚塊角點,減少人工選點的誤差,本研究採用平面交會或直線交會的方式 來獲得準確的磚塊角點坐標。垂直、水平量測是利用水準氣泡尺靠上欲量測的位置,
使水準氣泡居中之後,量得磚塊與水準氣泡尺之間的空隙,以整段長度中最大的空 隙作為該位置扣分標準,該最大空隙在砌磚競賽中稱為垂直或水平誤差,磚牆垂直 度量測方法如圖 4-8。平整度量測,又可以稱為直線量測,量測磚塊疊砌是否成一 直線,與垂直水平量不同,不須使水準氣泡居中,直接以水準尺靠上欲量測的直線 段,量得最大縫隙進行扣分,該最大縫隙在砌磚競賽中稱為平整度誤差。以下將依 序詳述尺寸、垂直、水平、平整度在點雲模型中的量測方式。
圖 4-7、捲尺量測磚牆長度及高度
(a)將水準氣泡尺靠上 欲量測垂直度之位置
(b)調整水準氣泡尺使 氣泡居中
(c)若磚牆不垂直則磚 塊與水準氣泡尺之間 會產生空隙
(d)使用間隙尺量得最 大空隙作為垂直誤差
4.5.1 尺寸量測
觀察點雲模型可以發現模型中的磚塊大致可分為三種,如圖 4-9,一為位於磚 牆最上方角落的兩塊磚,此類磚塊由三個面來表示,可由三平面交會獲得磚塊角點。
二為磚牆側邊的磚塊,由兩個面來表示,可先由點雲擬和出兩平面,再以磚塊邊緣 點雲擬合出第三個平面,最後以三平面交會出磚塊角點。三為磚牆中間的部分,只 有一個面來表示的磚塊,此類磚塊可由磚塊邊緣點雲擬合出兩直線,以兩直線交會 出磚塊角點即可。
首先探討由三平面組成之磚塊點雲類型,進行平面擬合計算三平面方程式前,
須將磚塊每個面獨立分割出來,由於不同平面其法向量不同,因此利用各點之法向 量進行 k-means 分群,即可分割出不同平面之點雲。接著將分群後的點雲利用最小 二乘法擬合出屬於各自的平面方程式。空間中的平面方程式可由下式來表示:
𝑎𝑋 + 𝑏𝑌 + 𝑐𝑍 + 1 = 0 4-8 其中,(X, Y, Z)為平面上任一點坐標,(a, b, c)為平面方程式係數,(𝑎, 𝑏, 𝑐) ∈ R,且 𝑎2+ 𝑏2+ 𝑐2 ≠ 0。
(a) (b) (c)
圖 4-9、由不同數量的平面來表示一塊磚
平面擬合採用廣義最小二乘平差(General Least Squares Adjustment)(Mikhail and Gracie, 1981),觀測方程式如下:
𝐹(𝑥, 𝑙) = 𝑎(𝑋 + v𝑋) + 𝑏(𝑌 + v𝑌) + 𝑐(𝑍 + v𝑍) + 1 = 0 4-9 其中,(𝑋, 𝑌, 𝑍)代表觀測量𝑙,即點雲坐標,(a, b, c)代表未知參數𝑥,(v𝑋, v𝑌, v𝑍)為 觀測量改正數 v。
若有 n 個觀測量則可列出 n 條觀測方程式,將觀測方程式整理成矩陣式如下:
𝐴v + 𝐵∆= 𝑓 4-10
其中,𝐴 =𝜕𝐹
𝜕𝑙,代表方程式對觀測量偏微分的係數矩陣,𝐵 =𝜕𝐹
𝜕𝑥,代表方程式對未 知參數偏微分的係數矩陣,v為觀測量改正數矩陣,∆為未知參數𝑥的修正量矩陣,
𝑓 = −𝐹(𝑥0, 𝑙0) − 𝐴(𝑙 − 𝑙0),𝑥0為未知參數近似值,𝑙0為觀測量近似值。
𝐴 =𝜕𝐹
𝜕𝑙 = [
𝜕𝐹1
𝜕𝑋1 0
⋮ 0
0
𝜕𝐹2
𝜕𝑋2
⋮ 0
⋯
⋯
⋱
⋯ 0 0
⋮
𝜕𝐹𝑛
𝜕𝑋𝑛
𝜕𝐹1
𝜕𝑌1 0
⋮ 0
0
𝜕𝐹2
𝜕𝑌2
⋮ 0
⋯
⋯
⋱
⋯ 0 0
⋮
𝜕𝐹𝑛
𝜕𝑌𝑛
𝜕𝐹1
𝜕𝑍1 0
⋮ 0
0
𝜕𝐹2
𝜕𝑍2
⋮ 0
⋯
⋯
⋱
⋯ 0 0
⋮
𝜕𝐹𝑛
𝜕𝑍𝑛]𝑛×3𝑛
4-11
𝐵 =𝜕𝐹
𝜕𝑥 = [
𝜕𝐹1
𝜕𝑎
𝜕𝐹2
𝜕𝑎
⋮
𝜕𝐹𝑛
𝜕𝑎
𝜕𝐹1
𝜕𝑏
𝜕𝐹2
𝜕𝑏
⋮
𝜕𝐹𝑛
𝜕𝑏
𝜕𝐹1
𝜕𝑐
𝜕𝐹2
𝜕𝑐
⋮
𝜕𝐹𝑛
𝜕𝑐 ]𝑛×3
4-12
v =
[ v𝑋1
⋮ v𝑋𝑛
v𝑌1
⋮ v𝑌𝑛 v𝑍1
⋮ v𝑍𝑛]3𝑛×1
𝑙 =
[ 𝑋1
⋮ 𝑋𝑛
𝑌1
⋮ 𝑌𝑛 𝑍1
⋮ 𝑍𝑛]3𝑛×1
∆= [ 𝛿𝑎 𝛿𝑏 𝛿𝑐 ]
3×1
4-13
根據廣義最小二乘平差原理可推導出:
(𝐵T𝑊𝑒𝐵)∆= (𝐵T𝑊𝑒𝑓) 4-14 v = 𝑄𝐴T𝑊𝑒(𝑓 − B∆) 4-15 其中𝑊𝑒為廣義平差中的權矩陣,Q 代表觀測量的 cofactor matrix。
𝑊𝑒 = 𝑄𝑒−1= (𝐴𝑄𝐴T)−1 4-16 令N = (𝐵T𝑊𝑒𝐵),t = (𝐵T𝑊𝑒𝑓)。則∆可寫為:
∆= N−1t 4-17
更未知參數近似值:
𝑥0,𝑛𝑒𝑤 = 𝑥0 + ∆ 4-18
更新觀測量近似值:
𝑙0,𝑛𝑒𝑤= 𝑙 + v 4-19
使用新的未知參數近似值及觀測量近似值計算∆,重複步驟直到∆趨近於 0 後,
更新未知參數近似值,即可獲得平面方程式係數(a, b, c)。
獲得磚面各自的平面方程式之後,由於磚塊為立方體,因此三平面之法向量不 共面,三平面必交於一點,該交點即為磚塊角點。三平面交點坐標可由克拉瑪公式 (Cramer's rule)求解,若三個平面方程式如下:
{
𝑎1𝑋 + 𝑏1𝑌 + 𝑐1𝑍 + 1 = 0 𝑎2𝑋 + 𝑏2𝑌 + 𝑐2𝑍 + 1 = 0 𝑎3𝑋 + 𝑏3𝑌 + 𝑐3𝑍 + 1 = 0
4-20
其中,(𝑎, 𝑏, 𝑐, 𝑑) ∈ R,𝑎2+ 𝑏2+ 𝑐2 ≠ 0。
令 ∆= |
𝑎1 𝑏1 𝑐1 𝑎2 𝑏2 𝑐2 𝑎3 𝑏3 𝑐3
| 、∆𝑋= |
1 𝑏1 𝑐1 1 𝑏2 𝑐2 1 𝑏3 𝑐3
| 、∆𝑌= |
𝑎1 1 𝑐1 𝑎2 1 𝑐2 𝑎3 1 𝑐3
| 、∆𝑍= |
𝑎1 𝑏1 1 𝑎2 𝑏2 1 𝑎3 𝑏3 1
|
由於三平面之法向量不共面,因此 ∆ ≠ 0,則三平面交於一點(Xp, Yp, Zp),如 圖 4-10。
𝑋𝑝 =−∆𝑋
∆ 、𝑌𝑝 =−∆𝑌
∆ 、𝑍𝑝 =−∆𝑍
∆ 4-21
若磚塊點雲由兩個平面組成,亦可使用三平面交會計算磚塊角點。首先利用各 點之法向量進行 k-means 分群,即可分割出兩平面點雲。接著將分群後的點雲利用 最小二乘法擬合出屬於各自的平面方程式,即可獲得二平面方程式。
第三個平面方程式代表磚塊頂面,由於此類型磚塊沒有磚塊頂面點雲,但可由 磚塊邊線擬合出頂面。首先將磚塊點雲建立 Delaunay 不規則三角網,由於磚塊有 轉折,為了不讓兩個面的點雲經由斜邊互相連接,因此需透過門檻值刪除過長的邊,
如圖 4-11 中虛線所示,確保三角網格能準確描述磚塊的兩個面。在不規則三角網 中,位於外圍的三角網格至少會有一個邊沒有相鄰的三角網格,如圖 4-11,A 三 角網格有一個邊沒有相鄰的三角網格,B 三角網格有兩個邊沒有相鄰的三角網格。
根據這樣的規則,任何一個三角網格只要有一個邊沒有相鄰的三角網格,就將此邊 的兩個端點視為磚塊面的邊緣點,邊緣點即可代表磚塊邊線(Pu and Vosselman, 2007)。再選取欲擬合出頂面之邊緣點進行平面擬合,如圖 4-12,獲得第三個平面 方程式。最後利用克拉瑪公式即可計算三平面交點,完成磚塊角點計算,如圖 4-13、
圖 4-14。
圖 4-10、三平面交會獲得磚塊角點(藍*)
圖 4-12、建立不規則三角網並找出邊緣點,紅點與藍點皆為磚塊邊緣點,
藍點為欲擬合磚塊頂面之邊緣點
圖 4-13、三平面交會
圖 4-14、磚塊角點(藍色+)
最後,若磚塊只由一個平面表示,則可利用磚塊邊緣線交會出角點,首先建立 Delaunay 不規則三角網,找出三角網格的邊緣點,選取欲量測角點附近之邊緣點 進行直線擬合獲得二直線,如圖 4-15。
三維直線方程式之參數式可由下式來表示:
{
𝑋 = 𝑋𝑝+ 𝑛𝑥𝑡 𝑌 = 𝑌𝑝+ 𝑛𝑦𝑡 𝑍 = 𝑍𝑝+ 𝑛𝑧𝑡
4-22
其中,(X, Y, Z)為直線上任一點坐標,(Xp, Yp, Zp)為已知直線通過一點,(nx, ny, nz)為 直線之方向向量,𝑡 ∈ R。
最小二乘直線擬合採用間接觀測平差(Least Squares Adjustment of Indirect Observations)(Mikhail and Gracie, 1981),觀測方程式如下:
𝐹(𝑥, 𝑙) = {
𝑋 + v𝑋− 𝑋𝑝− 𝑛𝑥𝑡 = 0 𝑌 + v𝑌− 𝑌𝑝− 𝑛𝑦𝑡 = 0 𝑍 + v𝑍− 𝑍𝑝− 𝑛𝑧𝑡 = 0
4-23
其中,(X, Y, Z)代表觀測量𝑙,即點雲坐標,(v𝑋, v𝑌, v𝑍)為觀測量改正數 v。而已知 直線通過一點(Xp, Yp, Zp),若假設點雲在 X、Y、Z 方向上之精度相同,則(Xp, Yp, Zp) 可由觀測量平均值獲得,𝑋𝑝 =∑ 𝑋
𝑛 、𝑌𝑝 = ∑ 𝑌
𝑛 、𝑍𝑝 = ∑ 𝑍
𝑛 。由於直線向量(nx, ny, nz)有 圖 4-15、建立不規則三角網並找出邊緣點,紅點與藍點皆為磚塊邊緣點,
藍點為欲擬合磚塊邊線之邊緣點
若有 n 個觀測量則可列出 3n 條觀測方程式,將觀測方程式整理成矩陣式如下:
v + 𝐵∆= 𝑓 4-24
其中,𝐵 =𝜕𝐹
𝜕𝑥,代表方程式對未知參數偏微分的係數矩陣,v為觀測量改正數矩陣,
∆為未知參數𝑥的修正量矩陣,𝑓 = −𝐹(𝑥0, 𝑙),𝑥0為未知參數近似值。
𝐵 =𝜕𝐹
𝜕𝑥 =
[
𝜕𝐹1
𝜕𝑛𝑦
𝜕𝐹1
𝜕𝑛𝑧
𝜕𝐹1
𝜕𝑡1
𝜕𝐹1
𝜕𝑡2 ⋯ 𝜕𝐹1
𝜕𝑡𝑛
𝜕𝐹2
𝜕𝑛𝑦
𝜕𝐹2
𝜕𝑛𝑧
𝜕𝐹2
𝜕𝑡1
𝜕𝐹2
𝜕𝑡2 ⋯ 𝜕𝐹2
𝜕𝑡𝑛
⋮ ⋮ ⋮ ⋮ ⋱ ⋮
𝜕𝐹𝑛
𝜕𝑛𝑦
𝜕𝐹𝑛
𝜕𝑛𝑧
𝜕𝐹𝑛
𝜕𝑡1
𝜕𝐹𝑛
𝜕𝑡2 ⋯ 𝜕𝐹𝑛
𝜕𝑡𝑛]3𝑛×(2+𝑛)
4-25
v =
[ v𝑋1 v𝑌1 v𝑍1
⋮ v𝑋𝑛 v𝑌𝑛 v𝑍𝑛]3𝑛×1
∆=
[ 𝛿𝑛𝑦 𝛿𝑛𝑧 𝛿𝑡1 𝛿𝑡2
⋮
𝛿𝑡𝑛](2+𝑛)×1
4-26
根據最小二乘平差原理可推導出:
(𝐵T𝑊𝐵)∆= (𝐵T𝑊𝑓) 4-27 其中𝑊為觀測量之權矩陣,假設點雲坐標在 X、Y、Z 方向上之精度相同,則各觀 測量之權重相等,𝑊為單位矩陣。
令N = (𝐵T𝑊𝐵),t = (𝐵T𝑊𝑓)。則∆可寫為:
∆= N−1t 4-28
更未知參數近似值:
𝑥0,𝑛𝑒𝑤 = 𝑥0 + ∆ 4-29
使用新的未知參數近似值重新計算∆,重複步驟直到∆趨近於 0 後,即可獲得 三維直線方程式之參數式,如式 4-22。