國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
磁黏滯式線性致動器之設計開發與特性研究 Development and Characteristic Study of a
Linear Magnetorheological Actuator
林碩彥
SHUO-YEN, LIN
指導教授:黃光裕 博士
Advisor: Kuang-Yuh Huang,Dr.-Ing.
中華民國 97 年 6 月
口試委員審定書
磁黏滯式線性致動器之設計開發與特性研究 Development and Characteristic Study of a
Linear Magnetorheological Actuator
誌謝
研究生生活就要劃下句點了,這兩年遇到許多值得感謝的人,讓我得以成 長,更有信心去面對未來的挑戰。
首先要感謝的就是黃光裕老師,從進實驗室開始對於選課的建議、文獻蒐集 方向和閱讀方式、到論文的撰寫,老師都提供許多寶貴的意見,給予我摸索、思 考的方向,並從這過程當中學習,才能使我從一個學士成為一個碩士。此外在日 常生活中的閒聊也獲得很多學術以外的觀念和知識。讓我對一些事物的態度有所 體會和改變。
再來就是感謝實驗室的成員,感謝阿包和我討論論文撰寫的方法,讓我更有 效率完成這篇論文。同時也幫我調整一個研究生應有的心態;感謝查和信在實驗 室給我的幫助,讓我完成嚴謹的實驗,提高論文的水準;感謝一起研究同類型題 目的阿鵬和我討論磁黏滯液體的性質,釐清對磁黏滯液體的一些誤解。感謝佳霖 和阿良學長幫忙投影片的指導,使口試的內容更加嚴謹。
最後感謝家人在研究生生活中對我的鼓勵和支持。在不順遂的時候永遠有個 放鬆重新再出發的地方。讓我在論文的每個部份都能全力以赴的去完成。這兩年 將會成為影響我這生最重要的階段,感謝每一個關心我的人。
摘要 中文摘要
磁黏滯液體(Magnetorheological Fluid ,MR-fluid)是一種由導磁微粒與載液組成的 液體,可以透過磁場來改變其黏滯度,被應用在減振和制動裝置上。本論文利用 磁黏滯液體受到磁場變化時所產生的內聚力變化的現象來設計開發主動式線性 致動裝置。首先根據磁黏滯致動器功能需求,提出液囊和多樣化磁迴路之設計概 念。並透過理論模型以及電腦輔助分析方式,分析探討磁迴路設計和操作參數對 通過磁黏滯液體磁場強度之影響。最後以實驗測試對致動器之位移、致動力、及 反應速度進行觀察和量測。致動前,致動器驅動電流與磁迴路之工作間隙成正比 關係;致動後磁黏滯致動器可產生穩定之致動力。而磁黏滯液體的殘留特黏現象 可藉由磁場的消除和壓縮彈簧力予以解除,以提高回復速度。
關鍵字:磁黏滯液體、線性致動器、磁迴路、液囊、工作間隙、驅動電流
Development and Characteristic Study of a Linear Actuator Driven by Magnetorheological Fluid
Shuo-Yen, Lin
英文摘要
Abstract
Magnetorheological Fluids, MR-fluids, normally consist of iron powder suspended in some carrier fluids. The viscosity and the yield stress of MR-fluids can be controlled by the applied magnetic filed, thus the main applications of MR-fluids are dampers and breakers. By utilizing the condensation force of the MR-fluids under the influence of the magnetic field, an active linear actuator is designed and developed in this thesis. According to the functional requirement, the design concepts of bladder and diverse magnetic loop are derived. Through the theoretical model and computer assister analysis, the influence of the design and operating parameters on the field strength through the MR-fluids and studied and analyzed. Finally, through the experimental testings, the displacement, the actuation force, and the reaction speed of the MR-actuator are comprehensively inspected and measured. During the pre-actuation phase, the driving current is linearly dependent on the air gap of the magnetic loop. During the actuation phase, MR-actuator can provide a stable push force. The remnant super-strong viscosity situation of the MR-fluids can be relieved by removing the magnetic filed and using compressive spring, which can increase the recovery speed.
目錄
口試委員審定書
... I誌謝
... II中文摘要
...III英文摘要
...IV圖目錄
... VII表目錄
...IX符號表
...X第一章 緒論
...11.1 研究動機與背景...1
1.2 文獻回顧...3
1.3 內容簡介...10
第二章 磁黏滯液體
...112.1 磁黏滯液體之成分與性質...11
2.2 磁黏滯液體的應用與研究...19
第三章 磁黏滯式線性致動器之設計開發
...213.1 工作原理和概念設計...21
3.2 設計評估與實體設計...28
第四章 致動器之磁迴路
...354.2 磁迴路模擬分析...41
第五章 磁黏滯式線性致動器之測試與特性分析
...455.1 實驗架構...45
5.2 系統測試...46
5.2.1 驅動磁場量測實驗...46
5.2.2 負載能力量測實驗...48
5.2.3 反應速率量測實驗...52
第六章 結論與未來展望
...57參考文獻
...59附錄 A 磁黏滯液體性能表
...63附錄 B 光纖位移計規格與特性
...67附錄 C 訊號擷取卡規格與特性
...69附錄 D 霍爾元件 3503 型錄
...70圖目錄
圖1.1 氣囊結構[2]...5
圖1.2 氣壓式機械手臂外觀[2]...5
圖1.3 可撓性靜電式線性致動器[3]...6
圖1.4 靜電薄膜式線性致動器...8
圖1.5 串聯彈性致動器結構圖[5]...8
圖1.6 機器人腳踝步的擺動[5]...9
圖1.7 主動式腳踝關節輔具外觀圖[9]...9
圖2.1 磁黏滯液體外觀[6]...11
圖2.2 Rabinow 製成的磁黏滯液體活塞裝置重量測試情形[7] ...12
圖2.3 磁黏滯液體實驗裝置及特性實驗[6]...13
圖2.4 磁性液體黏度對溫度變化圖[15]...14
圖2.5 磁場作用導磁粒子的排列狀態[8]...14
圖2.6 特黏現象示意圖[8]...15
圖2.7 鐵粉比例對磁黏滯液體特性關係圖[8]...15
圖2.8 導磁顆粒種類對磁黏度之影響[8]...16
圖2.9 大小顆粒比與降服剪應力關係圖[8]...16
圖2.10 界面活性劑(Oleic Aid)對降伏剪應力之影響[8]...17
圖2.11 磁黏滯液體中鐵粉顆粒外型電子顯微鏡照片[8] ...17
圖2.12 各種磁黏滯液體的使用濃稠(IUT)現象[7] ...18
圖2.13 磁黏滯液體活塞長時間閒置後重新操作時黏滯力的表現[8]...18
圖2.14 美國 Lord 公司開發的磁黏滯吸震器[14] ...19
圖2.15 磁黏滯式離合器[10]...19
圖2.16 大阪大學古莊研究室開發的義足系統[11] ...20
圖3.1 磁黏滯液體的作用模型[25]...21
圖3.2 磁迴路形式...23
圖3.3 乳膠管外觀[6]...24
圖3.4 磁黏滯液管彎曲變形致動原理...24
圖3.5 矽膠囊外觀圖[7]...25
圖3.6 磁黏滯液囊之工作原理...25
圖3.7 磁迴路示意圖...28
圖3.8 市售電磁鐵之吸附力對空氣間隙關係...29
圖3.9 磁黏滯液體 MRF-122-2ED 降伏剪應力對磁場關係圖 ...30
圖3.10 液囊式磁黏滯線性致動器之架構...32
圖3.11 各種永久磁石之
B
− 曲線[32]...33H
圖3.12 磁黏滯致動器之磁迴路示意圖...34圖4.2 液囊式致動器磁迴路和等效電路圖...38
圖4.3 Maxwell 磁場分析軟體所建構之磁迴路立體模型 ...41
圖4.4 Maxwell 磁場分析之網格模型圖 ...42
圖4.5 磁黏滯線性致動器之磁通密度 B 分布圖...44
圖5.1 磁黏滯線性致動器之系統測試架構圖...45
圖5.2 工作間隙調整裝置...46
圖5.3 工作間隙與驅動電流關係圖...47
圖5.4 負載量測實驗系統架構...49
圖5.5 負載能力對致動位移之關係圖...49
圖5.6 磁黏滯致動器之致動力示意圖...50
圖5.7 致動器推力與驅動電流實驗結果...51
圖5.8 磁場反應速度量測架構...52
圖5.9 磁場反應速度實驗結果...52
圖5.10 致動器之軸向位移量測架構...53
圖5.11 步階電流訊號與軸向位移對時間關係圖...54
圖5.12 正弦波電流與軸向位移對時間關係圖...55
表目錄
表1.1 轉動式致動器之技術比較與檢討(譯自[1]的表 1)...3
表1.2 線性致動器之技術比較與檢討(譯自[1]的表 2)...4
表3.1 磁迴路及磁黏滯液管或磁黏滯液囊的變化設計方案...26
表3.2 強導磁性之材料...29
表3.3 常用永久磁石的特性[32]...33
表4.1 磁迴路模形各項材質及參數設定...42
符號表
符號 說明 單位
a A
1A
2A
3A
4A
g1A
g2A
MRB
MR加速度
導磁材料截面積 導磁材料截面積 導磁材料截面積 導磁材料截面積 主要空氣間隙面積 側向空氣間隙面積 磁黏滯液體截面積 磁黏滯液體磁通密度
m/s2 mm2 mm2 mm2
mm2 mm2
mm2 mm2 Tesla
C
物質比熱 JgKC
M 電磁線圈平均比熱 JgKd
3d
ind
outd
wireE F F
MRF
pushH
中心磁極直徑 鋁製線圈套筒內徑 鋁製線圈套筒外徑 銅線直徑
功 力 磁引力 推力 磁場
mm mm mm mm J N N N N/A-m
I k L l
1l
2l
3l
4l
g1l
g2l
MRm N N
evenN
oddn P
inP
lossP
outR R
1R
2R
3R
4R
coil驅動電流 線圈層數 線圈銅線總長 導磁材料長度 導磁材料長度 導磁材料長度 導磁材料長度 主要空氣間隙長度 側向空氣間隙長度 磁黏滯液體高度 物體質量
電磁線圈總圈數 奇數層電磁線圈圈數 偶數層電磁線圈圈數 單層電磁線圈圈數 輸入功率
熱損耗 輸出功率 電磁鐵電阻 導磁材料磁阻 導磁材料磁阻 導磁材料磁阻 導磁材料磁阻 電磁線圈內電阻
A
mm mm mm mm mm mm mm mm kg
W W W Ω H-1 H-1 H-1 H-1 Ω
R
g1R
g2R
MRT T
reft U
HV
MRα
μη ΔT μ
0μ
MRμ
refμ
sμ
Tν π ρ
φ 1φ 3
主要空氣間隙磁阻 側向空氣間隙磁阻 磁黏滯液體磁阻 溫度
參考溫度 時間
霍爾元件感應輸出電壓 磁黏滯液體體積
導磁溫度係數 能量轉換效率 溫度變化量 空氣導磁係數
磁黏滯液體導磁係數 參考導磁係數
SS400 鋼材導磁係數 溫度T 時的導磁係數 速度
圓周率
銅線電阻係數 外圍磁極之磁通量 中心磁極之磁通量
H-1 H-1 H-1 K K sec V m3
K N/A2 N/A2 N/A2 N/A2 N/A2 m/sec
Ω-m Tesla Tesla
1
φ g 主要空氣間隙磁通量 Tesla
2
φ g 側向空氣間隙磁通量 Tesla
第一章 緒論
1.1 研究背景與動機
機器人工學之目的在於創造與人體類似的系統,但近年來機器人工學的研 究多注重在動作控制與人工智慧等軟體的開發上,但對於機器人之硬體如結構設 計或是致動方式卻不如軟體般有顯著的發展。無論是機械手臂或是步行機器人,
大多利用伺服馬達安置在關節處,控制馬達轉到所需的角度,但人體運動是靠遍 佈全身的肌肉來控制,肌肉收縮和放鬆的動作與線性致動器較為接近。線性致動 器在機器人工學的發展尚未有突破性的應用。所以此即為本論文之動機,設計開 發用於機械人工學的線性致動器。
目前材料領域中已有人工肌肉的研究,是將特殊的合成塑膠浸泡在離子溶 液中,利用通電的方式刺激而致動,為最接近人體肌肉構造的致動器,在材質和 應用上都仍在起步階段。而機械領域中常用的致動器原理包含有電磁式、靜電 式、氣壓式及液壓式等;但電磁式致動需要線圈、電池或外接電源;靜電式致動 除了電源外還需要高電壓產生裝置;氣壓式和液壓式致動則需要唧筒和壓縮裝 置。這些基本裝置以及能源供應裝置都有相當大的重量,因此限制了行動方便性 和活動範圍。
本論文之目的在於應用磁黏滯液體(Magneto-Rheological Fluid, MR Fluid)
設計開發線性致動器。磁黏滯液體可藉由磁場的控制改變其黏度,在過去的研究 中多應用於止滑、減震和吸震等裝置的開發。唯磁黏滯液體直接與活塞或是轉盤 接觸會產生液體老化現象,使其裝置的壽命沒有傳統裝置來的久,且磁黏滯液體
本論文致動器之主要設計概念採用磁黏滯液囊(液管)和電磁線圈,應用 磁黏滯液體能被磁場吸引的特性產生位移和出力,致動器也必須具備保護內部結 構的功能,遇到不當使用的環境或是外力時。由於磁黏滯液體的優點是性質介於 液體與固體中間,即使受到超過負荷的外力也可以避免致動單元受到損壞。同時 包覆磁黏滯液體採用軟彈性材料。避免磁黏滯液體直接與外界接觸,延長其使用 壽命。若磁黏滯液體的剛性不足也可以靠包覆材料來增加剛性。使致動器之設計 可以具有多變性。本論文開發之磁黏滯式致動器將採用模組化架構,使其能夠因 應致動性能之需求與予整合建構出所需之致動器。此致動器的開發可以給予磁黏 滯液體一個新的應用方向與探討相關特性。
1.2 文獻回顧
線性致動器在工程應用上有廣泛的使用,其原理有電磁,記憶合金,壓電 材料等。但利用磁黏滯液體的研究仍屬少數。
日本岡山大學的鈴森康一[1]蒐集了許多致動器料包括轉動及線性致動器的 資料,表1.1 和表 1.2 為各式致動器優缺點比較以及研發改善方向。
表1.1 轉動式致動器之技術比較與檢討(譯自[1]的表 1)
方式 優點 缺點 備註
1.電磁式 1
軸向間隙式 馬達
高出力
低電壓驅動
構造較2 簡單
構造略為複雜,難
以小型化
2. 電磁式 2
徑向間隙式
馬達
高出力
低電壓驅動
能量轉換效率高
構造複雜,難以小
型化
電磁馬達有高效率,高出力之優點,適合
作為工業用致動器。強力薄膜磁石及高占
積率線圈為開發重點。
3.壓電式 高出力
構造簡單
反應速度快
摩擦大,壽命短
效率低
高電壓驅動
雖有效率低、壽命短的問題,但構造簡單
利於微型化。電源關閉時機構會固定在接
觸狀態,適合用於遠端操作時的啟動開
關,但不適合時常轉動的機構。
4. 靜電式 1
軸向間隙
式馬達
構造簡單
低耗電
出力小
高電壓驅動
5. 靜電式 2
軸向間隙
構造較4 簡單
低耗電
出力小,若要高出
力需要減速機構
雖然出力小,高電壓是一問題,但致動器
體積小於毫米等級時效率跟出力都較電
磁式優秀,適合次毫米等級的馬達。若不
考慮4 間隙控制的困難性,構造簡單有利
於小型化,也可以得到比軸向間隙靜電馬
6.靜電式 3
波動馬達
低摩擦
不須組裝
低耗電
轉速低
出力小
高電壓驅動
相差運動的回轉會震動轉軸。雖需高電壓
驅動,但利用半導體製程不須組裝。適於
高扭力低轉速用途。也利於小型化。
表1.2 線性致動器之技術比較與檢討(譯自[1]的表 2)
方式 優點 缺點 備註
1.靜電式 構造簡單
堆疊結構可提高
出力
低耗電
出力小
高電壓驅動
可用IC 製程製作,適於小型低耗電致動
器
2. 記憶合
金(SMA)
構造機構簡單,
利於小型化
功率重量比高
低效率(熱能轉力
能)
反應速度慢
壽命短
能量轉換效率低,但本身即為致動器,應
用於微型機械可利於設計。但SMA 難以
加工、薄膜化,將是研究的主要方向。
3. 光驅動
式
構造簡單
不使用電
出力、位移小
效率低
反應速度慢
雖出力低,但可在無法用電的環境下(如
生物體內,有爆炸危險的地區)使用,並
不受電磁波的干擾。
4. 油壓式 出力大 構造複雜 若與供油源一體化(無控制閥門),則有
小型化的可能,適合高出力的工作。
5. 氣壓式 高出力
形狀簡單
不使用電
氣閥和氣壓損失的
問題,難以小型化
氣壓供給上雖有問題,但可提供一般加工
作業所需的力量。
6.壓電進行 速度快 出力小,摩擦問題 適合輕型物品的高速搬運。
7.壓電抓取
式
出力大 速度慢
構造複雜
電源關閉時機構會固定在接觸狀態,適合
用於遠端操作時的啟動開關。
8.電歪聚合
物
位移大
形狀簡單
效率高
高電壓驅動
出力較壓電材料小
位移和出力介於壓電材料和記憶合金之
間,但堆疊結構後所需的高電壓為研究重
點。
日本東京大學下山勳[2]利用氣壓致動器製作機械手臂,包含手腕和手指結 構。圖1.1 展示直徑約 3.5mm 的橡皮管製成致動器,灌入氣體膨脹時產生軸向收 縮,洩氣及回復原長度,利用尼龍網包覆以限制其膨脹程度。圖1.2 顯示 16 根 氣壓致動器置於前臂部的情形,透過線牽引控制手指動作以減少手掌所需的體 積。
圖1.1 氣囊結構[2]
圖1.2 氣壓式機械手臂外觀[2]
橡皮管
尼龍網
用方式如圖1.3(a),在厚度約 30 微米的固定導電薄膜上施加交錯的正、負和 0 電位,讓浮動薄膜產生相異的感應電荷,再經由改變固定薄膜的電荷,使浮動薄 膜因相同電荷產生斥力,而相異電荷可產生吸力,進而使浮動薄膜產生出力和位 移。為提升出力,採用如圖1.3(b)所示的積層結構。
(a) 結構與致動程序
(b) 積層結構
圖1.3 可撓性靜電式線性致動器[3]
並聯的方式設計出圖1.4(c)的致動單元,圖1.4(b)再串聯數個致動單元後累積位移及出力 的效果可控制伸長和彎曲的動作。
(a) 致動原理
(b) 聚合物薄膜的串聯結構
(d) 串聯致動單元結構 圖1.4 靜電薄膜式線性致動器
美國麻省理工學院Daniel Joseph Paluska[5]以無刷直流馬達配合螺桿、彈簧 碳纖管建構出如圖1.5的串聯彈性致動器(Series Elastic Actuator),將馬達的旋 轉轉變成線性移動。透過致動器結構中的應變規可直接量測彈簧的變形並立即回 饋給系統,作為位移伺服控制之訊號。
圖1.5 串聯彈性致動器結構圖[5]
此致動器應用在機器人雙足,如圖1.6所示將兩致動器並聯至於小腿的位 置,則可控制機器人腳板的滾翻和俯仰角度。在主動式腳踝關節輔具[6]的應用 上如圖1.7所示,使用一致動器置於小腿後側配置串聯彈性致動器,用於協助腿 部肌力衰退者增加出力,改善行走姿態。
(a) 下擺45度 (b)上提20度 (c)左右偏擺20度 圖1.6 機器人腳踝步的擺動[5]
圖1.7 主動式腳踝關節輔具外觀圖[9]
1.3 內容簡介
本篇論文分為五章,本章為緒論,分別介紹研究背景及研究動機,並且回 顧與致動器的相關研究文獻。
第二章介紹磁黏滯液體的各項性質和磁黏滯液體的主要應用範圍。
第三章探討磁黏滯致動器的設計開發,將磁黏滯致動器分為多個設計單元 進行多樣化設計並互相搭配,探討最佳的實體設計方案。
第四章針對磁黏滯致動器所需要的電磁線圈和磁迴路進行數學模型的建構 和電腦軟體的分析,針對公式推導結果與電腦分析結果進行比對分析。
第五章以實驗方式對致動器的位移、反應速度和負載能力進行測試,依據 功能需求完成建構實驗方法和架構,藉由系統測試深入了解影響參數和系統性能 之關係,並與第四章的分析結果進行比較。探索改善系統性能之方案。
最後一章彙整研究結果以及提出總結論,並提出改進以及未來發展方向。
第二章 磁黏滯液體
2.1 磁黏滯液體之成分與性質
磁黏滯液體是在載液中加入導磁性金屬微粒的黏滯液體,依照外部磁場的強 弱,可使被磁化的粒子互相吸引而提高黏度,在弱磁場就可以讓黏度和降伏剪應 力大幅上升,在強磁場作用下甚至能有固化的現象。目前在減振和能量吸收方面 已有一些應用和實驗性的產品。
圖2.1 磁黏滯液體外觀[6]
1950年代Rabinow和Winslow最先製作出了磁黏滯液體。Rabinow將羰基鐵粉 以重量比9:1的方式與矽油(礦物油或是煤油)互相混合並加入油脂或是界面活 性劑使鐵粉不易沉澱。圖2.2顯示一個磁黏滯液體做成的活塞裝置,此裝置可撐 起體重約53公斤的女士,相當於承受100kPa的壓力。
Winslow 則將羰基鐵粉和礦物油和重量比 10:1 互相混合,以及採用了不同 於 Rabinow 的界面活性劑如分散劑(環烷酸鐵或油酸化鐵)和金屬皂(硬酯酸鋰或 是硬酯酸鈉)。亦製造出可承受 100kPa 壓力的磁黏滯液體。
圖2.2 Rabinow 製成的磁黏滯液體活塞裝置重量測試情形[7]
Rabinow與Winslow都指出磁黏滯液體的備製不難,經過實驗驗證提出磁黏 滯液體兩個重要的特性:降伏剪應力與沉澱速率。往後磁黏滯液體的研發,也大 都朝這兩個特性進行探討。
根據日本 SIGMA Hi-CHEMICAL[6]公司所得的實驗曲線如圖 2.3 所示,可 以完整呈現出磁黏滯液體和一般黏滯液體的性質差異。圖2.3(a)為實驗裝置,以 直徑50mm 的葉輪對磁黏滯液體以攪拌方式進行黏滯度和轉速的實驗。圖 2.3(b) 為無磁場作用下的實驗結果,磁黏滯液體的行為與一般黏滯液體的行為類似,黏 滯度會隨著葉輪轉速提昇而降低。
為了進行性質比較,首先將無磁場作用以及葉輪轉速 10rpm 所得之黏滯度 定為1。
圖2.3(c)呈現永久磁石作用距離 L 對黏滯度之影響曲線,磁場作用距離 L 越
但是相對黏度與轉速的變化趨勢卻大致保持不變。磁場比轉速更適於控制改變磁 黏滯液體的黏滯度。
(a) 實驗裝置 (b) 無磁場作用
(c) 固定轉速 10rpm (d) 固定磁場作用距離L=7.5mm 圖2.3 磁黏滯液體實驗裝置及特性實驗[6]
磁黏滯液體中的載液亦屬於黏滯液體,因此載液的絕對黏度會隨著溫度升 高而降低。圖2.4 顯示磁黏滯液體黏度在無磁場作用下對溫度的變化,從室溫至 100℃間絕對黏度變動的範圍約在 2.5Pa‧s 內。
轉速
相對黏度
相對黏度
扇葉轉速 轉速
絕對黏度
導磁材料 磁黏滯流體
永久磁鐵
圖2.4 磁性液體黏度對溫度變化圖[15]
依據Fernando D. Goncalves等人[8]的文獻,改變磁黏滯液體黏度的主要因素 為液體中鐵粉的行為,圖2.5展示磁場對鐵粉的影響示意圖,在未受到磁場影響 下,磁黏滯液體中鐵粉呈現布朗運動不規則分佈。施加外部磁場時,鐵粉則會沿 著磁力線規律的排列,液體的黏度和降伏剪應力因此提高。
(a) 無磁場 (b) 弱磁場 (c) 強磁場 圖2.5 磁場作用導磁粒子的排列狀態[8]
當排列好的磁黏滯液體受到擠壓時,會如圖2.6所示的堆積在一起,原先細 微的鏈狀結構會變得粗壯,讓黏度大幅上升,稱為特黏(super-strong Viscosity)現
碳氫化合物磁性流體
溫度T/℃
黏度η/Pa‧s
圖2.6 特黏現象示意圖[8]
磁黏滯液體的備製關鍵在於鐵粉的添加比例和沉澱速率。降伏剪應力與相對 黏度會隨著鐵粉的比例增加而提高,如圖2.7 所示。
(a)降伏剪應力 (b)黏度
圖2.7 鐵粉比例對磁黏滯液體特性關係圖[8]
材料的導磁性也會影響磁黏滯液體的表現。如圖2.8(a)所示,導磁性較高的 鐵鈷合金比羰基鐵粉所製成之磁黏滯液體其相對黏度隨磁場增強上升較多;圖 2.8(b)也展示經過防腐蝕處理的鐵粉比普通的鐵粉更容易隨磁場增強提高黏度。
F
F
YIELD STRESS (psi) VISCOSITY( cP)
VOLUME FRACTION VOLUME FRACTION
(a)金屬粉末種類 (b)鐵粉處理 圖2.8 導磁顆粒種類對磁黏度之影響[8]
鐵粉顆粒大小的一致性也會影響磁黏滯液體的表現,在 20%~40%鐵粉的 磁黏滯液體中,顆粒大越小不一致時降伏剪應力對磁場反應越強,如圖2.9 所示,
大小顆粒比例不同時在各種磁通密度下降伏剪應力與黏度關係圖。顯示相同的磁 場下,全數大顆粒鐵粉的液體雖有高黏度,但降伏剪應力卻比小顆粒混合比1:
3 低。小顆粒鐵粉在磁場中所建構的鏈狀結構很容易因為磁鍵合力不夠大而被破 壞,大顆粒鐵粉則會因為間隙過大而無法建立成穩固的鏈狀結構。
YIELD STRESS (psi)
VISCOSITY (cP)@40℃
磁黏滯液體的另外一項特性為沉澱速率。鐵粉的密度比基底溶液大上許多,
所以沉澱是必然現象。磁黏滯液體必須有均勻分布的鐵粉才能展現穩定的性能,
所以減緩鐵粉的沉澱速度便是界面活性劑的主要功能,圖2.10 展示界面活性劑
(Oleic Acid)對降伏剪應力之影響。降伏剪應力會隨著介面活性劑之濃度增加 而下降。界面活性劑提高了鐵粉與基底溶液間的相互作用,以致於使鐵粉不易沉 澱,但同時也促成鐵粉不易形成鏈狀結構而使降伏剪應力降低。
圖2.10 界面活性劑(Oleic Aid)對降伏剪應力之影響[8]
磁黏滯液體在長時間使用後,會因為鐵粉的結構被破壞,導致黏度上升,因 此使用壽命比一般黏滯液體短。圖 2.11 呈現的是活塞裝置中的磁黏滯液體經過 一百萬次運轉前後鐵粉顆粒外型的巨大變化。
(a)未使用過的鐵粉顆粒 (b)一百萬次週期後的鐵粉顆粒
YIELD STRESS (kPa)
Magnetic Field Strength (kG)
即便是微小粒子經過長時間的摩擦、碰撞也會有變形甚至產生結塊的情形。
這種液體變濃稠、黏度上升的現象稱為使用濃稠現象IUT(In-Use-Thickening),
圖2.12 展示美國 Lord 公司長時間測試磁黏滯液體黏度提高的情形,曲線#1 為該 公司最早開發的磁黏滯液體,曲線#2、#3、#4 為已上市的產品,#4 液體經過 2.5 百萬個週期仍沒有明顯的黏度變化。
圖2.12 各種磁黏滯液體的使用濃稠(IUT)現象[7]
磁黏滯液體長時間不使用時鐵粉便會沉澱,其沉澱比例將會影響再度操作時 的初始表現,圖 2.13 顯示一磁黏滯液體活塞利用加速沉澱的方法,使其達到靜 置一年的效果後再重新操作的情形,發現只需要操作一個週期便可恢復原來的功 能。
Off-Sate Load(N)
2.2 磁黏滯液體的應用與研究
依據磁黏滯液體的特性,磁黏滯液體大多用於避震、吸震或是制動裝置。德 國車廠AUDI 和美國凱迪拉克各別在生產的車輛上安裝了圖 2.13 由美國 Lord 公 司開發的磁黏滯液體避震器,此避震裝置以磁黏滯液體取代一般的避震器油,透 過電流控制隨時改變車輛避震性能,使行駛車輛能夠在不同道路狀況下也有很好 的避震效果。
圖2.14 美國 Lord 公司開發的磁黏滯吸震器[14]
大阪大學古莊研究室[10]將磁黏滯液體用於扭力傳遞上,圖 2.14 的磁黏滯式 離合器,利用電流調整磁場以改變磁黏滯流體的黏度,進而影響傳導之扭力矩,
磁場增加時磁黏滯液體的黏度因此增強輸出扭力矩則會較接近輸入扭力矩,可以 作為一種可調減速裝置,沒有複雜的齒輪機構。
大阪大學古莊研究室[11]亦將磁黏滯液體用於人工義肢上,利用圖 2.15(a)的 活塞裝置(MR Breaker)組成圖 2.15(b)的義肢系統,以磁控磁黏滯液體方式使活塞 鎖死在任意位置,將腳板之角度固定,避免行走時腳板受重力下垂阻礙行進。
(a) 磁黏滯活塞裝置
(b) 磁黏滯義足系統
圖2.16 大阪大學古莊研究室開發的義足系統[11]
第三章 磁黏滯式線性致動器之設計開發
3.1 工作原理和概念設計
應用在機器人上的致動器普遍結構過於複雜,而且需要體積龐大的能量提 供來源,大為影響移動性和配置便利性。為了減少慣性作用力所產生之殘振,阻 尼減振器提供了有效的方法,但也是機器人系統更加複雜,限制機器人的行動性。
使用磁黏滯液體的致動器可以整合其磁黏滯阻尼特性,透過致動和阻尼減 振的合併,可以使致動器系統體積更為緊緻,大為提升其應用範疇。本章首先從 磁黏滯液體的特性探討出發,以探尋合適的磁黏滯致動器的概念設計方案。
圖3.1 表示磁黏滯液體常用的工作方式有三種:(a) 剪力模式、(b) 流動模 式、(c) 變形模式;主要是利用磁場改變磁黏滯液體之黏度和降伏剪應力,進而 開發出減振或制動裝置。除此之外,磁黏滯液體也具有導磁特性會受到磁場吸引 而產生位移和出力,本論文則依據上述兩種特性進行具有阻尼減振功能致動器之 設計開發。
(a) 剪力模式 (b) 流動模式 (c) 變形模式
本論文將磁黏滯致動裝置之功能結構主要分成磁場產生單元、磁黏滯致動 單元和輸出作用單元。
磁場產生單元提供工作所需的磁能,其中包括永久磁石和電磁線圈,磁迴 路則負責導引磁能到工作位置。磁黏滯致動單元進行能量轉換,透過磁能變動來 改變磁黏滯液體性質,進而產生作用力或位移的變化輸出作用單元則負責將磁黏 滯液體所產生的變動予以展現輸出。
磁場產生的磁迴路形式可以設計成U 型、同心圓及多磁極三種,圖 3.2(a) 為U 型磁迴路,U 形結構由電磁線圈線圈和導磁元件構成,磁場透過兩個磁極 垂直導入磁黏滯液體中。同心圓型磁迴路配置則如圖3.2(b)所示,磁場由中心磁 極流出,磁黏滯液體則放置在磁迴路空間中。經過磁黏滯液體再導入外圍磁極圓 筒。多磁極式磁迴路配置如圖3.2(c)所示,利用電磁線圈之磁極搭配,來引導磁 力線流向磁黏滯液體之工作處所。
(a) U 型磁迴路結構
(b) 同心圓式磁迴路結構
導磁元件
電磁線圈 磁黏滯液體
(c) 多磁極式磁迴路結構 圖3.2 磁迴路形式
U 型磁迴路以垂直導入磁黏滯液體中。配置的分布將影響致動力的均勻性。
同心圓式磁迴路有較對稱的磁場分布,但是磁場強度將隨著離中心磁極之距離增 大而急驟下降。多磁極式磁迴路與同心圓式磁迴路類似,調整磁極的位置可創造 均勻的磁場分布,磁場強度衰減方式亦與同心圓式磁迴路相同,但結構內互斥的 磁場能些微集中發散的磁力線。
本論文利用液囊或液管將磁黏滯液體限制在一定的作用空間中,提供保護 及轉換磁力為致動力的功能。材料之彈性性質和幾何尺寸是磁能轉換致動能量的 關鍵影響因素。矽膠管和戲膠囊是性質穩定的材料,被廣泛應用在醫學工程上,
本研究選用矽膠管和矽膠囊作為磁黏滯液體的容器。
矽膠管的外觀如圖3.3 所示,彈性和撓性極佳,同時有很好的氣密性。根據 多樣化設計原則,磁黏滯液管可以作串聯式或並聯配置的變化設計,串聯可以提 升變形位移的累積,並聯可以提升變形出力。圖3.4 展示矽膠管的一種致動方式,
以磁力吸引矽膠管中磁黏滯液體,而產生彎曲變形。
圖3.3 乳膠管外觀[6]
(a)未施加磁場 (b) 施加磁場 圖3.4 磁黏滯液管彎曲變形致動原理
圖3.5 為矽膠囊之外觀,大多為訂製品使磁黏滯液體的填充或是更動較為困 難。但球狀液囊使變形較均勻,受外力時也不像乳膠管會有挫曲的現象發生。工 作原理可分兩種,第一種是厚度吸附致動變形,如圖3.6(a)所示,利用磁引力吸 引矽膠囊外圍未被吸附的部份,使矽膠囊緊吸附於磁極液囊因而厚度縮小變形。
第二種是厚度伸長變形致動原理,如圖3.6(b)所示,在周圍設置導磁材料將發散 的磁力線加以導引,液囊中的磁黏滯液體便會隨著磁力線排列,液囊產生厚度深 長。
線圈 導磁材料
磁黏滯液管
圖3.5 矽膠囊外觀圖[7]
(a)未施加磁場 (b) 施加磁場 (a) 厚度吸附變形致動原理
(b) 厚度深長變形致動原理 H H
電磁線圈 導磁材料
磁黏滯液管
依據前述兩種致動概念原理,可將各種磁迴路以及磁黏滯液管或磁黏滯液 囊的空間配置作變化設計,表3.1 展示了幾種不同的設計概念。
表3.1 磁迴路及磁黏滯液管或磁黏滯液囊的變化設計方案
No 示意圖 說明
1 並排磁黏滯液管+U 型磁迴路
磁黏滯液管被兩端磁極吸引 產生彎曲,進而造成軸向距 離縮短。
2 並排磁黏滯液管+雙磁迴路
以 複 數 線 圈 形 成 多 個 磁 迴 路。並以磁極吸引磁黏滯液 管產生彎曲變形,進而造成 軸向距離縮短。
3 並排磁黏滯液管+同心圓式磁迴路
同心圓式磁極、導磁材料和 磁黏滯液管形成磁迴路。磁 極 吸 引 磁 黏 滯 液 管 產 生 彎 曲,進而造成軸向距離縮短。
磁黏滯液管 電磁線圈
磁黏滯液管
電磁線圈
4 橫向磁黏滯液管+同心圓式磁迴路
以同心圓式之中心磁極吸引 磁黏滯液管產生彎曲變形。
5 磁黏滯液囊+U 型式磁迴路(側向變形)
兩端磁極使液囊產生拉伸變 形,進而此液囊中心區域產生 凹陷變形。
6 磁黏滯液囊+同心圓式磁迴路(縱向變形)
利用磁黏滯液囊上下兩側的 相異磁極作用,使液囊產生厚 度拉伸變形。
由表3.1 所展示的各種變化設計中可以看出,致動性能關鍵是如何在磁黏滯 致動單元中產生足夠的磁能變化,而磁極間隙又會影響致動行程和磁迴路的磁 阻,兩者非同調變化,並須進行最佳化設計。
磁黏滯液囊 電磁線圈
磁黏滯液管
電磁線圈
電磁線圈
磁黏滯液囊
3.2 設計評估與實體設計
良好磁迴路的設計原則為減少磁漏發生和降低磁迴路中的磁阻。磁漏通常 發生在磁迴路截面變化過大以及空氣間隙過大的位置,磁力線將會流出預先規劃 的磁迴路路徑,致使磁能無法有效充分提供給所需工作處所。降低磁阻則要靠選 用高導磁係數的導磁材料和限制空氣間隙。
根據Lord 公司提供的磁黏滯液體之磁通密度與磁場關係曲線圖(附錄 A),
可以得知磁黏滯液體只有較小的導磁性。因此磁黏滯致動單元和空氣間隙在磁迴 路所佔空間比例會影響磁迴路之導磁效果。
從磁黏滯致動單元與磁迴路的關係來看,表3.1(2)、(3)和(4)的磁黏滯液管 則佔整體磁迴路較大比例,所以磁通量會損失較多。以圖3.7 的同心圓式磁迴路 為例,磁力線從中心磁極發出導入磁黏滯液管中,最後再經由徑向配置的導磁元 件回流電磁線圈底部。就磁迴路的設計而言,元件相接處過多也會產生或多或少 的磁阻和磁漏。,所以也必須考量磁迴路元件以及接觸面數量。
導磁棒
磁黏滯液管
導磁片
電磁鐵
磁力線流向 導磁栓塞
以表3.1(6)的設計方案而言,磁力線從中心磁極流出,經過空氣間隙後被磁 黏滯液管或導磁材料流向兩側,最後回到電磁線圈的底部。磁迴路元件和接合處 最少,有利於提升磁迴路之導磁效能,同時製造和組裝也較容易因此本論文採用 此種磁迴路和液囊配置之設計方案作為致動器結構之基礎。
同心圓式磁極可以選用市售的電磁鐵,其最大工作電流為350 毫安培。特 性曲線如圖3.8 所示,對 50mm 厚的 SS400 熱軋鋼板所產生的吸附力會隨著空氣 間隙的縮小而呈等比級數增強,空氣間隙的增加則會快速減少減少吸附力。
圖3.8 市售電磁鐵之吸附力對空氣間隙關係
除了 SS400 熱軋鋼板之外,還有相當具有強導磁效能的導磁材料如表 3.2 所示,選用時必須考量可取得性和加工製造性,甚至熱處理程序。
表3.2 強導磁性之材料
矯頑磁力 飽和磁通量
名稱 成份%
初導磁率 (μ0)
最大導磁率
(μr) (Oe) (Gauss)
0 0.1 0.2 0.3 0.4 0.5 空氣間隙h(mm)
400
200
0
吸附力(N)
電磁鐵
SS400
h
矽鋼1 4Si、96Fe - 7,000 0.6 19,700 矽鋼2 3Si、97Fe - 10,000 0.2 20,000 玻莫合金1 45Ni、54Fe 27,000 25,000 0.3 16,000 玻莫合金2 79Ni、4Mo、16Fe 20,000 80,000 0.05 8,700
高導磁合金
75Ni、2Cr、5Cu、
18Fe 20,000 110,000 0.03 7,200 超導磁合金 79Ni、5Mo、15Fe 100,000 800,000 0.004 8,000
美國Lord 公司的兩種磁黏滯液體 MRF-122-2ED 和 MRF140CG,其材料性 質如附錄A 所示。MRF-122-2ED 的磁粉含量最少,所以密度最低,流動性也最 高,但是相對導磁性也最小。MRF-140CG 的黏度最高,導磁性最好,對磁場反 應較敏感;但因為高黏度性質也較不易變形或變形緩慢。磁黏滯液體中的承載液 必須注意其揮發性質,必須防止揮發而改變液體性質。圖 3.9 為 MRF-122-2ED 降伏剪應力對磁場強度的關係圖,顯示磁黏滯液體的降伏剪應力在低磁場時呈線 性上升,高磁場時則達飽和。在減震和制動裝置上磁黏滯液體多操作在低磁場範 圍的線性區域。而磁黏滯致動器必須操作在高磁場範圍,磁引力必須大於磁黏滯 液體的降伏剪應力,才能讓磁黏滯液體產生變形位移。
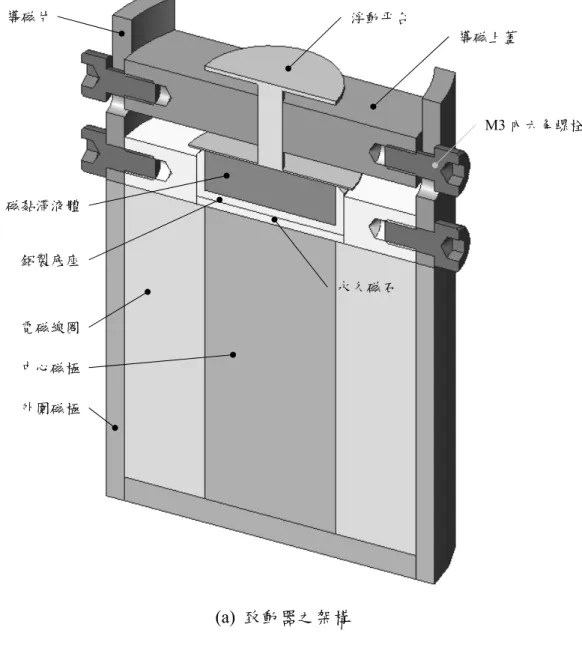
圖 3.10(a)展示了液囊式磁黏滯線性致動器之架構,永久磁石提供預磁吸 力,使磁黏滯液體能保持住基本狀態且提高磁黏滯液體的降伏剪應力至高磁場區 段。驅動電磁鐵所產生的磁場和永久磁石之磁場相互增減作用,進而使磁黏滯液 體有較大的磁場強度變化,有助於提升致動器的位移和出力。磁黏滯液囊的結構 如圖 3.10(b),磁黏滯液體置於鋁皿中,上方附上撓性塑膠片,提供變形空間之 外還用以避免液體外漏。致動器之外觀如圖 3.10(c)所示,由於致動器和電磁鐵 分別設計成模組化架構,因此加上最外圍的鋁套筒提供保護和固定的功能。
(a) 致動器之架構
導磁上蓋 浮動平台
鋁製底座 磁黏滯液體
M3 內六角螺栓
永久磁石 導磁片
電磁線圈
中心磁極
外圍磁極
(b) 磁黏滯液囊
(c) 致動器之外觀
圖3.10 液囊式磁黏滯線性致動器之架構
圖3.11 和表 3.3 為常用永久磁石之特性一覽表。銣鐵硼磁石 NdFeB 具有最 大的體積磁能乘積(BH)max=320kJ/m3,單位體機能提供最大磁能,同時抗磁場強 度也高達696kA/m,較不易被消磁。此外導磁係數 μs=1.05 很接近空氣的導磁係 數
μ
0=1,所以磁迴路設計上就不需要嚴格的尺寸限制,同時工作間隙變化對磁 通密度之影響也較不顯著塑膠片
鋁製皿 磁黏滯液體
鋁製外殼
電磁鐵
圖3.11 各種永久磁石之
B
− 曲線[32]H
表3.3 常用永久磁石的特性[32]
Material Composition Remanenc
e (T)
Coercivity (kA/m)
(BH)max
(kJ/m3) Steel 99 % Fe, 1 % C, 0.9 4 1.59 36Co Steel 36 % Co, 3.75 % W, 0.96 18.25 7.42
5.75 % Cr, 0.8 % C
Alnico 2 12 % Al, 26 % Ni, 0.7 52 13.5 3 % Cu, 63 % Fe
Alnico 5 8 % Al, 15 % Ni, 1.2 57.6 40 24 % Co, 3 % Cu,
50 % Fe
Alnico DG 8 % Al, 15 % Ni, 1.31 56 52 24 % Co, 3 % Cu,
50 % Fe
Ba Ferrite BaO.6Fe2O3 0.395 192 28 PtCo 77 % Pt, 23 % Co 0.645 344 76
Remalloy 12 % Co, 17 % Mo, 1.0 18.4 9 71 % Fe
Vicalloy 13 % V, 52 % Co, 1.0 36 24 35 % Fe
Samarium-cobalt SmCo5 0.9 696 160 Neodymium-
iron-boron
Nd2Fe14B 1.3 1120 320
致動器磁迴路構成如圖3.12 所示,磁力線磁迴路由中心磁極發出,經過空 氣間隙後,透過導磁上蓋導向外圍導磁套筒,再流回電磁鐵之底部。磁迴路在中 心磁極和導磁上蓋之間形成磁場工作區域,並通過磁黏滯液體,磁黏滯液體會隨 磁場強度產生軸向排列變形,進而轉變成所需位移和出力。
圖3.12 磁黏滯致動器之磁迴路示意圖
磁力線流向
電磁線圈
導磁套筒
第四章 致動器之磁迴路
4.1 磁迴路理論分析模型建構
致動器設計中磁迴路可粗分為:電磁線圈與磁迴路兩部分。電磁線圈模型能 找出一定體積下線圈線徑與圈數的關係,再考慮電流產生的熱變化對磁場的影 響,以計算出所能產生的最大磁場。
圖4.1 為鋁製線圈套筒,外徑為
d ,內徑為
outd ,高度為
inh 。在此空間中
coil 可以繞線直徑d
wire的銅線n 層。(4.1)式為線圈之幾何參數關係式(
1)
2 3
2−
d
=d
+d n
−d
wire in wire
out (4.1)
圖4.1 電磁線圈幾何尺寸關係圖
此種堆疊繞線方式會使奇數層圈數會比偶數層圈數多1 圈,而奇數層可繞 圈數為
h
coilN
= ,N
取整數, (4.2)d
outd
ind
wireh
coil所以總繞圈數為。
∑ +∑
=
N
evenN
oddN
(4.3)磁場強度受到線圈圈數和電流直接影響,但是熱耗損
P
loss卻與驅動電流和 線圈電阻有關。t R P
lossI
coil2
= (4.4)
線圈的總線長
L 為
( )
[ ]
∑[ ] ( )
∑ + − × + + × −
=
d
3d k
1N d
3d m N
1L π
in wireπ
in wire , (4.5) 其中k =1,3,5,7…為奇數,m=2,4,6,8…為偶數而電磁線圈銅線的內電阻直接與線圈長度
L 和導線的截面積 A
wire有關2
4
wire wire
coil
d
L A
R L
ρ π ρ
== (4.6)
其中
ρ
為銅線電阻係數,A
wire為銅線截面積電磁線圈產生的溫度變化Δ 則與熱耗損 P
T
loss 產生和線圈本身熱容量以及 線圈散熱特性有關M coil
mC t R T
=I
2Δ (4.7)
其中
t 為操作時間;
m是電磁線圈整體質量;CM表電磁線圈平均比熱。導磁材料的磁導率溫度係數
α
μ定義為導磁率μ
T與μ
ref和溫度變化T 與 T
ref 之關係( T T
ref)
TrefT
refref ref T
Δ
= −
−
= −
μ μ μ μ
μ
α
μμ
(4.8)依據安培定律可推導電磁線圈產生的磁通量
l μ NIA
φ
= (4.9)其中
μ
為導磁係數;NI 是電磁線圈之電動勢; A 為磁迴路之截面積;
l表作 用長度。將(4.4)式、(4.7)式和(4.8)式代入磁通量(4.9)式中,經整理可得
l NIA d
L mC
t I
line M
ref ⎥×
⎦
⎢ ⎤
⎣
⎡
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ ×
+
= 2 4 2
1
α ρπ
μ
φ
μ (4.10)(4.10)式可知電磁鐵長時間使用下會發熱導致的磁場衰減量,溫度上升也會 造成電磁鐵電阻的提高。因此在操作磁黏滯致動器時必須考慮電磁鐵的電流和操 作時間。避免電磁鐵過熱對磁黏滯致動器的性能產生影響。
從電磁線圈產生的磁通量中以及磁迴路之建構如圖4.2(a)所示,可以進一步 計算導磁上蓋在工作間隙
l
g1對磁黏滯液體所產生的磁引力。l
3l
2l
g2l
4l
MRl
g1l
1A
3A
2A
1A
4l
1l
4d
3(b) 等效電路圖
圖4.2 液囊式致動器磁迴路和等效電路圖
圖4.2(b)為磁迴路類比等效電路圖各部磁阻可表為
1 1 1
A l μ
s=
R ,
2 2 2
A l μ
s=
R ,
3 3 3
A l μ
s=
R ,
4 4 4
A l μ
s=
R ,
1 0
1 1
g g
g
A
l
=
μ
R ,
2 0
2 2
g g
g
A
l
=
μ
R ,
MR MR MR MR
A l
=
μ
R ,
其中
μ
s是SS400 熱軋鋼板之導磁係數,μ
0為空氣之導磁係數,而μ
MR是磁黏滯液體之導磁係數。
對稱的磁迴路設計使l1=l4,
l
2 =l
3+l
MR +l
g1,假設導磁元件的截面積皆相 等即A
1 =A
2 =A
3 =A
4,此外空氣間隙面積A 、磁黏滯液體截面積
g1 AMR相同於磁極中心面積
A ,
3A
3 =A
MR =A
g1;側向空氣間隙面積A 則相當於鋁製皿的側面
g2 面積φ 1 φg2 φg1
R1
R3
R1
R2
R2
R4
R4
Rg1
Rg2
Rg2
RMR
φ 3
φ1
2
φg φg1
NI
( )
4 2 1
4 1 2
R R R
R R R R
+ +
= +
g g
g g
g (4.11)
由於
l 遠大於
g2l ,所以
g1 R 遠大於g2 R , 則g1 R 可再簡化為g Rg1+R4,忽 略側向磁漏的情形下。工作間隙的磁通量定會全通過磁黏滯液體。,因此1
1
φ
φ
g ≈ (4.12)從磁動勢與磁通量和磁阻之關係
(
3) (
1 1 2)
1 03 R +RMR +
φ
R +R +φ
Rg −NI
=φ
(4.13)以及對稱的磁迴路建構將φ3 =2φ1代入(4.13)式可計算出通過磁黏滯液體的 磁通量
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ +
+ +
= +
0 1 1
3 2 1
1 2 2 2
μ μ
μ φ
MR g MR MR
MR
s A
l A
l A
l l l
NI
(4.14)
因此磁黏滯液體與導磁上蓋之間的磁通密度
B
MR為MR
MR
A
B
= 2φ
1(4.15) 所以導磁上蓋吸引磁黏滯液體的磁引力
F
MR可表示為2
2 0 MR MR MR
F B A
=
μ
(4.16)磁黏滯線性致動器的致動機制是磁引力
F
MR 大於磁黏滯液體的降伏剪應 力,使磁黏滯液囊產生拉伸變形。因此再詳細考慮磁黏滯液囊變形前後的數學模 型。若選用導磁係數
μ
s很高的材料則1 3 2
1 2
2
A
l l l
μ
s+
+ 會趨近於0 可忽略,因此 4.14
式可簡化為
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ +
=
0 1
1 2
μ μ
φ
MR g MR MR
MR
A l A
l NI
(4.17)
磁黏滯液囊尚未產生變形則
l
MR、AMR為定值,可將4.15 式整理為 )( 1 2 1
1
C C l
gI
=φ
+ (4.18)其中
A N
C l
MR MR
MR
μ
21= ,
N C A
MR 0 2
1
=
μ
皆為常數,可知在一定的工作間隙l
g1下,驅動電流
I
和磁通量φ 呈線性關係,或是要得到一定的磁通量1 φ ,驅動電流1I
和 工作間隙l
g1呈線性關係。將(4.15)式、(4.16)式和(4.18)式整理可得磁引力 FMR與驅動電流
I 和工作間
隙l
g1的關係2
1 2 1 3 2 1 0
2 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
= +
=
g MR
MR
C C l
C I
F A φ
μ
(4.19)其中
0 3
2
μ A
MRC
= ,可知要得到使磁黏滯液囊變形的磁引力,驅動電流I 會和
工作間隙l
g1呈線性關係。當磁黏滯液囊產生變形,磁黏滯液體的體積為定值,因此
MR MR
MR l A
V = × (4.20)
又導磁上蓋與電磁鐵間的距離為工作間隙
l
g1與磁黏滯液體高度l
MR之和1 3
2
l l
MRl
gl
− = + (4.21)帶入(4.19)式可得到磁引力 FMR與磁黏滯液體高度
l
MR的關係式( )
2
0 3 0 2
2
2 2
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ + − −
=
μ
μ μ
MRMR MR MR MR
MR
l l l l
V l F NI
(4.22)
由(4.19)式和(4.22)式顯示了磁引力與工作間隙 lg1、電流大小
I、磁黏滯液體
高度l
MR的關係。磁引力與驅動電流呈平方正比關係,與磁黏滯液體高度呈三次 方反比關係。另外要得到使磁黏滯液囊變形的磁引力,驅動電流和工作間隙呈一4.2 磁迴路模擬分析
理論模型模擬分析可以詳細得知幾何設計參數對磁場的影響,但礙於為了 使分析能效率進行必須簡化模型,所以會犧牲一些細節考量。除了理論模型推倒 分析之外,還運用電腦模擬分析對實體設計模型進行更詳細探討,以填補簡化理 論模擬分析之缺失
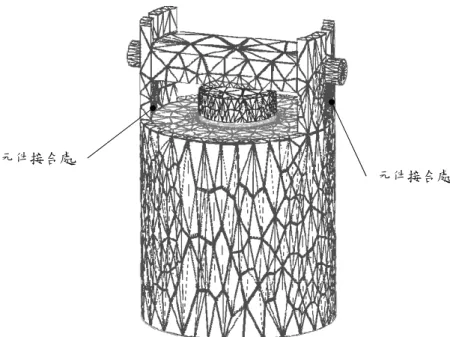
本論文利用Maxwell 軟體針對液囊式磁黏滯致動器進行磁迴路分析,外觀 模型如圖4.3 為了增加運算速度,簡化磁迴路中部份元件的形狀,同時也省略了 不會影響磁迴路架構的非導磁材料如油封環和鋁製元件等。除了要觀察磁場和磁 力線的分布及流向外,在導磁片、螺栓和工作間隙的磁漏現象也是觀察重點,同 時與數學模型做對照。並且將分析結果與理論模型做比較探討。
圖4.3 Maxwell 磁場分析軟體所建構之磁迴路立體模型
圖4.4 顯示立體模型在 Maxwell 軟體中的網格,因為磁漏多發生於元件相接
磁黏滯液體 導磁上蓋
導磁片
線圈
電磁鐵
圖4.4 Maxwell 磁場分析之網格模型圖
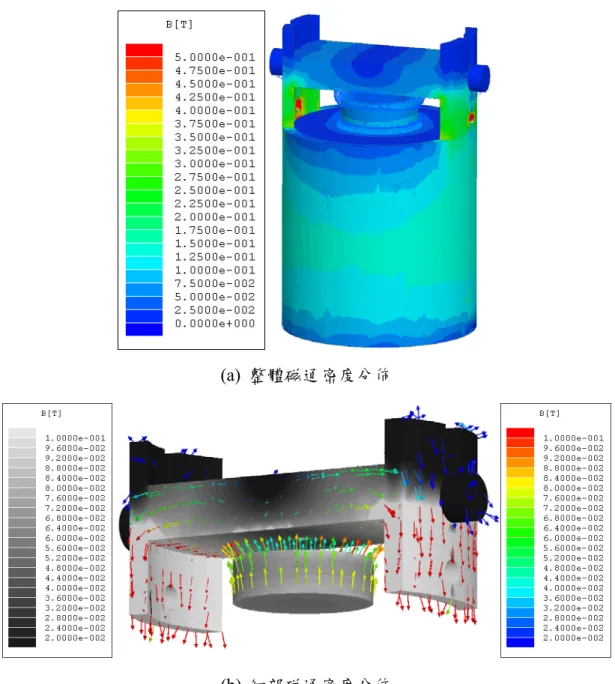
以表4.1 所設定的各項元件材質及參數進行磁通密度與磁場密度的分析。圖 4.5 顯示了磁通密度和磁場密度的分析結果。
表4.1 磁迴路模形各項材質及參數設定 (a) Maxwell 材質設定
元件名稱 材質 外圍磁極 Steel 中心磁極 Steel 導磁上蓋 Steel 導磁栓塞 Steel 導磁片 Steel 線圈 Copper
元件接合處
元件接合處
(b) 各項參數設定(對應圖 4.3)
參數 參數說明 設定值
h
MR 液皿式致動器中磁黏滯液體厚度 5 mml
1電磁鐵的直徑
40 mml
2磁迴路的高度
50 mml
3中心磁極的長度
20 mml
4導磁上蓋的半寬度
20 mml
g1 液皿式致動器工作間隙 3 mml
g2 液皿式側向空氣間隙 12 mmA
1電磁鐵底部磁極面積
1256.6 mm2A
2導磁片截面積
37.2 mm2A
3 液皿式致動器中磁黏滯液體面積 200 mm2A
4導磁上蓋截面積
100 mm2NI 線圈截面積總電流大小
500 A圖4.5(a)展示液皿式致動器的磁通量的分析結果,導磁片和螺栓處都呈現無 磁力線經過的現象,所以不會產生側向磁漏,可以忽略側向空氣磁阻。圖4.5(b) 展示磁黏滯液體工作區域分析,可觀察到導磁片的磁通密度最大,由磁黏滯液體 流出的磁力線都可以被導磁片引導回電磁鐵。此外磁黏滯液體與導磁上蓋間的磁 通密度約0.8 特斯拉大部份的能量在此聚集,也可以提高磁黏滯線性致動器的效 能。
(a) 整體磁通密度分佈
(b) 細部磁通密度分佈
圖4.5 磁黏滯線性致動器之磁通密度 B 分布圖
第五章 磁黏滯式線性致動器之測試與特性分析
5.1 實驗架構
根據磁黏滯線性致動器所需具有的性能,來建構測試系統。圖5.1 為測試系 統之功能架構其中包含了,位移量測、負載量測以及反應速度量測。
圖5.1 磁黏滯線性致動器之系統測試架構圖
影響磁黏滯線性致動器性能的關鍵因素為磁迴路效能以及磁黏滯液體與導 磁上蓋之間的工作間隙,除此之外工作間隙又會直接影響致動行程、負載性及動 態特性。因此實驗架構中先以驅動磁場量測實驗決定此致動器適當的工作間隙後 再進行其他實驗。
磁黏滯液體與一般黏滯液體相同,黏度隨溫度上升而降低。所以將實驗環 境控制在室溫25 度。此外電磁鐵的工作電流雖無特別限制,但長時間操作時會 發熱影響磁黏滯液體的性質。因此依照各實驗所需電磁鐵操作時間的長短選擇適
效能量測系統
磁黏滯液體線性致動器 驅動磁場量測系統 光纖測距儀
負載能力量測系統 荷重計
霍爾元件
反應速度量測系統 光纖測距儀
Labview 程式
5.2 系統測試
5.2.1 驅動磁場量測實驗
驅動磁場量測實驗之目的為量測使磁黏滯液體產生變形的磁場。磁黏滯液 體不施加磁場就有一定的降伏剪應力。施加磁場後降伏剪應力會上升,使液體更 難變形或推動。但超過一定磁場強度後,磁黏滯液體的降伏剪應力的上升幅度會 趨於平緩。若再增強電流,導磁上蓋對磁黏滯液體的吸引力會大於降伏剪應力使 磁黏滯液體產生變形。
此實驗使用磁黏滯液體採用MRF-122-2ED 和 MRF-140CG-250 兩種磁黏滯 液體,量測變形的難易度。圖5.2 為驅動磁場之實驗量測架構,以精密位移平台 調節導磁上蓋的位置,決定工作間隙的大小,記錄下浮動平台產生位移時的驅動 電流,藉此以瞭解能驅動磁黏滯液體產生變形時的磁場。
精密位移平台
![圖 1.5 串聯彈性致動器結構圖[5]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/21.892.309.581.107.327/圖15串聯彈性致動器結構圖5.webp)
![圖 2.2 Rabinow 製成的磁黏滯液體活塞裝置重量測試情形[7] Rabinow與Winslow都指出磁黏滯液體的備製不難,經過實驗驗證提出磁黏 滯液體兩個重要的特性:降伏剪應力與沉澱速率。往後磁黏滯液體的研發,也大 都朝這兩個特性進行探討。 根據日本 SIGMA Hi-CHEMICAL[6]公司所得的實驗曲線如圖 2.3 所示,可 以完整呈現出磁黏滯液體和一般黏滯液體的性質差異。圖 2.3(a)為實驗裝置,以 直徑 50mm 的葉輪對磁黏滯液體以攪拌方式進行黏滯度和轉速的實驗。圖 2.3(b)](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/25.892.314.581.110.509/Rabinow製成磁黏滯液體活塞裝置重量測試情Rabinow都指出磁黏滯液體的備製.webp)
![圖 2.4 磁性液體黏度對溫度變化圖[15] 依據Fernando D. Goncalves等人[8]的文獻,改變磁黏滯液體黏度的主要因素 為液體中鐵粉的行為,圖2.5展示磁場對鐵粉的影響示意圖,在未受到磁場影響 下,磁黏滯液體中鐵粉呈現布朗運動不規則分佈。施加外部磁場時,鐵粉則會沿 著磁力線規律的排列,液體的黏度和降伏剪應力因此提高。 (a) 無磁場 (b) 弱磁場 (c) 強磁場 圖 2.5 磁場作用導磁](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/27.892.281.611.128.445/磁性液體黏度對溫度變化圖依據Fernando等人文獻改變無磁場弱磁場強磁場.webp)
![圖 2.6 特黏現象示意圖[8] 磁黏滯液體的備製關鍵在於鐵粉的添加比例和沉澱速率。降伏剪應力與相對 黏度會隨著鐵粉的比例增加而提高,如圖 2.7 所示。 (a)降伏剪應力 (b)黏度 圖 2.7 鐵粉比例對磁黏滯液體特性關係圖[8] 材料的導磁性也會影響磁黏滯液體的表現。如圖 2.8(a)所示,導磁性較高的 鐵鈷合金比羰基鐵粉所製成之磁黏滯液體其相對黏度隨磁場增強上升較多;圖 2.8(b)也展示經過防腐蝕處理的鐵粉比普通的鐵粉更容易隨磁場增強提高黏度。 FF](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/28.892.245.649.109.376/特黏現象示意磁黏滯液體的備製關鍵在於鐵粉添加比例和沉澱速率降.webp)
![圖 3.3 乳膠管外觀[6] (a)未施加磁場 (b) 施加磁場 圖 3.4 磁黏滯液管彎曲變形致動原理 圖 3.5 為矽膠囊之外觀,大多為訂製品使磁黏滯液體的填充或是更動較為困 難。但球狀液囊使變形較均勻,受外力時也不像乳膠管會有挫曲的現象發生。工 作原理可分兩種,第一種是厚度吸附致動變形,如圖 3.6(a)所示,利用磁引力吸 引矽膠囊外圍未被吸附的部份,使矽膠囊緊吸附於磁極液囊因而厚度縮小變形。 第二種是厚度伸長變形致動原理,如圖 3.6(b)所示,在周圍設置導磁材料將發散 的磁力線加](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/37.892.323.574.112.366/乳膠管外未施加磁場b施加磁場磁黏滯液管彎曲變形致動原為矽.webp)
![圖 3.5 矽膠囊外觀圖[7] (a)未施加磁場 (b) 施加磁場 (a) 厚度吸附變形致動原理 (b) 厚度深長變形致動原理 H H電磁線圈導磁材料磁黏滯液管](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/38.892.266.627.120.420/矽膠囊外觀圖未施加磁場b施加磁場厚度吸附變形致動原理b.webp)
![圖 3.11 各種永久磁石之 B − 曲線[32] H 表 3.3 常用永久磁石的特性[32] Material Composition Remanence (T) Coercivity(kA/m) (BH) max(kJ/m3 ) Steel 99 % Fe, 1 % C, 0.9 4 1.59 36Co Steel 36 % Co, 3.75 % W, 0.96 18.25 7.42](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607607.633307/46.892.194.704.116.452/各種永久磁石−曲線H表常用永久磁石特性MaterialRemanenceTCoercivitykAmBHSteelFeCCo.webp)