國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
國道旅行時間資訊之時空無縫演算模型 A Spatio-Temporal Seemless Model for
Predicting of Highway Travel Time
楊傑理 Yang, Chieh-Li
指導教授:張堂賢 教授 Advisor: Tang-Hsien Chang, Ph.D.
中華民國 102 年 6 月
Jun. 2013
2
I
誌謝
初來乍到台北,這對我來說是一個完全陌生的環境,感謝恩師張堂賢教授願 意接受一個沒有交通背景,也不會寫程式的學生,願意從零開始「Training」,提 供我一個安定的研究環境。
感謝組內師長龍天立老師、周家蓓老師、張學孔老師、許添本老師、賴勇成 老師及陳柏華老師;儘管各位師長並非我的指導教授,但當學生於學術研究或是 做人處世遇到瓶頸時,各位師長總是不吝於伸出援手。
感謝兩位博士學長楊瓅凱、闕嘉宏;阿凱學長是我程式語言的啟蒙恩師,回 想起當初每週 Meeting 交出慘不忍睹的結果時,阿凱學長臉上那哭笑不得的表情,
至今仍令我汗顏…阿凱學長,我們還是約打球吧!
嘉宏學長則引領著我研究前進的方向,在研究陷入誤區時,習慣去找嘉宏學 長聊聊,學長給的建議每每可以將我由泥淖中拉起,令我少走許多彎路。嘉宏學 長,結婚時請記得發帖給我,祝你們百年好合!
感謝同家戰友伯嘉、姿君;研究所好友信宏、俊評、鴻軒、品竹、沛婕、道 中、軒宇、奕辰、巧筠、承晏、振宗、珮暄、宜穎等人,是你們給了我充實且愉 快的兩年時光!
最後,要感謝我的家人做我最堅實的後盾,無條件的支持我,令我沒有後顧 之憂。
兩年研究所求學生涯,至此劃下句點;這一路走來,得到許多貴人的幫助及 提攜;求學路上,因為你們,使我不致獨行。萬千謝意,僅以此篇誌謝,向各位 致上我最誠摯的謝意。
楊傑理 誌於土木館 312 2013 年七月
II
摘要
旅行時間預測,為先進用路人資訊服務(Advanced Traveler Information Services, ATIS)各項服務之重要核心參考。基於準確的旅行時間預測,方可做出 合理的路徑導引決策,進而判斷各項交通資訊對於個別用路人的必要性。
完善的歷史資料,是準確旅行時間預測的基礎;本研究對於歷史資料使用傅 立葉轉換處理,將歷史資料轉換為參數,不但節省了資料儲存空間、提升資料存 取速度,且將不連續的歷史資料轉為無縫連續型的函數。
後續之旅行時間預測模式則依預測時距長短,分為長期預測及短期預測兩種 模式。長期預測模式依據前述的傅立葉轉換歷史資料參數,經演算求得與預測時 距相對應的歷史資料以進行旅行時間預測;短期預測模式則使用卡曼濾波法,根 據即時資料趨勢進行旅行時間預測。長期預測模式與短期預測模式之分界門檻值 訂定為 15 分鐘。
本研究以國道一號為實驗對象進行旅行時間預測實驗。實驗結果顯示,在絕 大多數的情形下,預測旅行時間與真實旅行時間的誤差值(以 MAPE 計算)皆不大 於 10,依統計學家 Lewis (1982) 所提出的衡量標準,本研究之預測方法績效為 高精準度。
關鍵詞:旅行時間預測、漏失資料插補、資料融合、傅立葉轉換、卡曼濾波
III
Abstract
Travel time predicting is the important core reference of Advanced Traveler Information Services (ATIS). Only based on the accurate travel time predicting, we can make a reasonable route guidance decisions. Then we can judge the necessity of traffic informations for individual users.
A complete historical data is the corner stone of accurate travel time predictions.
This study dealt historical data with the Fourier transform, which transforms the data into the parameters. This process saved the storage space, improved data access efficiency, and made the discrete data transformed into seemless, continuous function.
The follow-up module of travel time prediction is divided by predicting temporal distance into two parts, which are long-term prediction and short-term prediction. The long-term prediction is based on the Fourier transform, and deduces the historical data corresponding the temporal distance. The short-term prediction is based on Kalman Filter, and does the prediction to react the real-time data. The threshold of long-term and short-term is 15 minutes.
In this study, we did a travel time predicting experiment on national freeway number one. The result shows that the error values, calculated by MAPE, are not greater than 10 in most cases. By statistician Lewis metrics proposed in 1982, this result is sorted in high accuracy.
Keywords: Travel time prediction, Missing data interpolation, Data fusion,
Fourier transform, Kalman filter.
IV
目錄
誌謝………..…….I
摘要………...…………...II
Abstract………..III
目錄……….IV 圖目錄………VII 表目錄………..VIII第一章 緒論 ... 1
1.1 研究動機 ... 1
1.2 研究目的 ... 2
1.3 研究方法與流程 ... 3
1.4 研究範圍 ... 6
第二章 文獻回顧 ... 7
2.1 先進旅行者資訊系統 (ATIS) ... 7
2.1.1 交通服務 e 網通 ... 8
2.1.2 台北市交通控制中心 ... 9
2.1.3 交通部高速公路局 ... 10
2.1.4 各縣市公車動態資訊系統 ... 11
V
2.2 漏失資料插補 ... 12
2.2.1 離線插補 ... 12
2.2.2 線上插補 ... 14
2.3 資料融合 ... 17
2.4 旅行時間預測 ... 18
2.4.1 車流理論 ... 18
2.4.2 類神經網路模式 ... 19
2.4.3 統計方法 ... 22
2.4.4 卡曼濾波 ... 24
2.4.5 頻率分析技術 ... 25
第三章 研究方法 ... 29
3.1 資料插補 ... 29
3.2 資料融合法 ... 30
3.3 傅立葉轉換法 ... 31
3.4 卡曼濾波法 ... 34
3.4.1 卡曼濾波系統基本描述 ... 34
3.4.2 卡曼濾波法 ... 36
3.4.3 濾波器 ... 38
第四章 系統建置 ... 40
4.1 系統開發環境 ... 40
4.2 資料庫模組 ... 41
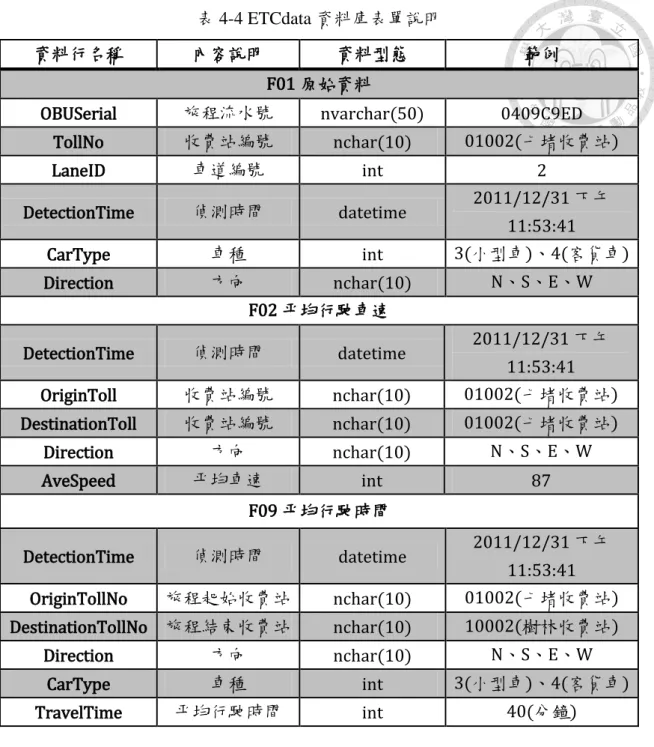
4.2.1 ETCdata 資料庫 ... 41
VI
4.2.2 VDdata 資料庫 ... 44
4.2.3 Result 資料庫 ... 46
4.3 歷史資料處理模組 ... 48
4.3.1 異常交通資料處理 ... 50
4.3.2 交通資料融合 ... 54
4.3.3 資料參數化 ... 59
4.4 旅行時間預測模組 ... 63
第五章 實驗設計與分析 ... 66
5.1 績效評估指標 ... 66
5.2 長短期預測模式門檻值訂定 ... 67
5.3 實驗方法 ... 68
5.4 相鄰站旅行時間預測結果 ... 72
5.5 相鄰站旅行時間預測績效分析 ... 81
5.6 非相鄰站旅行時間預測結果與分析 ... 84
第六章 結論與建議 ... 86
6.1 結論 ... 86
6.2 建議 ... 87
VII
圖目錄
圖 1-1 旅行時間預測示意時空圖 ... 2
圖 1-2 研究流程圖 ... 4
圖 1-3 研究範圍示意圖 ... 6
圖 2-1 交通服務 e 網通網站路網資訊圖 ... 8
圖 2-2 台北市交通控制中心路網資訊圖 ... 9
圖 2-3 交通部高速公路局路網資訊圖 ... 10
圖 2-4 台北市公共運輸處公車動態資訊系統 ... 11
圖 3-1 卡曼濾波演算流程圖 ... 38
圖 4-1 歷史資料處理流程圖 ... 49
圖 4-2 異常交通資料處理流程圖 ... 51
圖 4-3 VD 異常資料處理例... 53
圖 4-4 ETC 異常資料處理例 ... 54
圖 4-5 資料融合流程圖 ... 55
圖 4-6 以 ETC 平均速度推估 VD 通過時間點示意圖 ... 56
圖 4-7 以 VD 速率建構行駛速率函數 ... 57
圖 4-8 以 VD 速率倒數函數計算旅行時間 ... 58
圖 4-9 交通資料融合處理例 ... 59
圖 4-10 傅立葉轉換模式流程 ... 60
圖 4-11 交通資料參數化例 ... 61
圖 4-12 旅行時間預測流程圖 ... 64
圖 5-1 旅行時間預測實驗流程 ... 70
圖 5-2 相鄰站旅行時間預測結果分類圖 ... 81
圖 5-3 MAPE 分配區間直條圖 ... 82
圖 5-4 非相鄰站旅行時間預測結果分類圖 ... 85
VIII
表目錄
表 2-1 漏失值插補文獻回顧整理表 ... 16
表 2-2 資料融合文獻回顧整理表 ... 18
表 2-3 旅行時間預測文獻回顧整理表 ... 27
表 4-1 遠通電收 ETC 資料類別 ... 41
表 4-2 車輛事件內容 ... 41
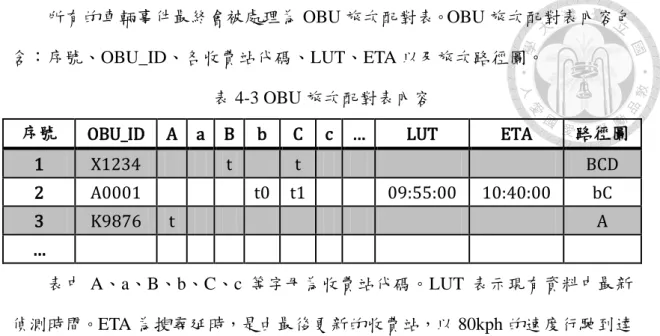
表 4-3 OBU 旅次配對表內容 ... 42
表 4-4 ETCdata 資料庫表單說明 ... 44
表 4-5 VD_N1 資料表單說明 ... 45
表 4-6 N1_VDSpeed_FT 資料表單說明 ... 47
表 4-7 N1_R2RTT 資料表單說明 ... 47
表 4-8 N1_R2RTT_FT 資料表單說明 ... 48
表 4-9 誤差限度與疊加餘弦波數目關係表 ... 60
表 4-10 林口交流道至桃園交流道旅行時間傅立葉歷史曲線 ... 62
表 5-1 MAPE 評估指標 ... 66
表 5-2 長短期預測模式門檻值驗證 ... 67
表 5-3 旅行時間預測驗證之資料組成 ... 69
表 5-4 汐止收費站至泰山收費站實驗結果 ... 72
表 5-5 汐止收費站至泰山收費站模式預測績效 ... 72
表 5-6 泰山收費站至楊梅收費站實驗結果 ... 73
表 5-7 泰山收費站至楊梅收費站模式預測績效 ... 73
表 5-8 楊梅收費站至造橋收費站實驗結果 ... 74
表 5-9 楊梅收費站至造橋收費站模式預測績效 ... 74
表 5-10 造橋收費站至后里收費站實驗結果 ... 75
表 5-11 造橋收費站至后里收費站模式預測績效 ... 75
表 5-12 后里收費站至員林收費站實驗結果 ... 76
表 5-13 后里收費站至員林收費站模式預測績效 ... 76
表 5-14 員林收費站至斗南收費站實驗結果 ... 77
表 5-15 員林收費站至斗南收費站模式預測績效 ... 77
表 5-16 斗南收費站至新營收費站實驗結果 ... 78
表 5-17 斗南收費站至新營收費站模式預測績效 ... 78
表 5-18 新營收費站至新市收費站實驗結果 ... 79
表 5-19 新營收費站至新市收費站模式預測績效 ... 79
表 5-20 新市收費站至岡山收費站實驗結果 ... 80
表 5-21 新市收費站至岡山收費站模式預測績效 ... 80
IX
表 5-22 路段分區預測績效 ... 83 表 5-23 星期別分類預測績效 ... 83 表 5-24 非相鄰站旅行時間預測績效整理 ... 84
1
第一章 緒論
1.1 研究動機
近 年 來 世 界 各 先 進 國 家 皆 致 力 發 展 智 慧 型 運 輸 系 統 ( Intelligence Transportation System, ITS),將先進科技帶來的便利性利用於運輸系統,以期改 善國民生活品質,提高人民「行」的舒適性。根據交通部運輸研究所於 2002 年 的定義,將 ITS 分為九大服務領域,其中先進用路人資訊服務(Advanced Traveler Information Services, ATIS)係藉由先進資訊、通訊或其他相關技術,提供旅行相 關的資訊給用路人;以資訊傳播的角度而論,ATIS 無疑為 ITS 九大領域中最為 核心的一項。而「旅行時間預測」一環,為 ATIS 各項服務之重要核心參考。基 於準確的旅行時間預測,方可做出合理的路徑導引決策,進而判斷各項交通資訊 對於個別用路人的必要性。
進行旅行時間預測的方式不勝枚舉,但每種方法皆需歷史資料或即時資料的 輔助。例如以車流理論方法推估路段旅行時間【Oh、Jayakrishnan、Recker,2002】
的研究即是使用點偵測器為資料來源。又或是使用統計迴歸分析方法【邱孟佑,
2010】則是使用電子收費系統及車輛偵測器的歷史資料為資料來源。
台灣目前對於各項交通資料的處理皆為定期結算的方式。結算週期長者,可 長達一日,每次結算整日資料;結算週期短者,可短至每五分鐘結算,甚或每分 鐘結算。不論各種資料結算週期長短,皆是以定期結算方式結算,而定期結算則 無可避免的將資料型態定為離散型資料,使得資料在結算週期間存在空白地帶;
而真實的交通狀態則為時變且連續,不論時間如何變動,交通狀態依然無縫,意 即在任何時間點間皆不存在資料空白地帶。因此本研究期望以合理可靠之方法,
2
將離散型歷史資料轉為連續型資料,以更加符合真實交通狀態;並據此連續型資 料應用於國道旅行時間預測,驗證其績效。
1.2 研究目的
一般路段旅行時間預測方式為旅次行經的路徑上所有路段之旅行時間預測 值算術和【Chen and Chien,2001;魏健宏等,民 92】。而路徑上各路段的旅行 時間預測值並非針對同一時間點做預測,而是將前綴路徑之旅行時間預測值納入 計算,累加旅行時間後,對於真正進入該路段的時間點做該路段的旅行時間預 測。
圖 1-1 旅行時間預測示意時空圖
圖 1-1 為旅行時間預測之示意圖,旅次出發時間為 08:00 AM,首先對「路 段一,08:00 AM」做旅行時間預測,得到預測結果為 30 分;因此將出發時間加 上 30 分,預計於 08:30 AM 進入路段二,於是對「路段二,08:30 AM」做旅行 時間預測,所得結果為 45 分;最後將進入路段二的時間加上 45 分,即對「路段
8:00 8:15 8:30 8:45 9:00 9:15 9:30 9:45
路段一 路段二 路段三
「路段二,08:30 AM」預測
「路段三,09:15 AM」預測
「路段一,08:00 AM」預測
3
三,09:15 AM」做旅行時間預測,所得結果為 30 分。本次路徑旅行時間預測結 果即為 105 分(30+45+30)。
為使用路人可依照個別需求,取得有效且穩定的旅行時間預測。本研究欲將 離散型的交通歷史資料;轉換以參數構築成連續型的交通狀態並紀錄。並且根據 前述連續型交通狀態,建構一套時間、空間資料皆無縫的國道旅行時間預測模 型。
1.3 研究方法與流程
本研究之主要發想為「以電子收費通行資料為基礎,融合高速公路之車輛偵 測器之資料,推得國道上各位置速率值。並根據前述速率融合值計算各路段之旅 行時間,進而預測各路段之後續旅行時間。」
研究流程如下:
4
圖 1-2 研究流程圖
如圖 1-2 所示,首先對研究問題進行界定,並回顧文獻,在了解現存系統與 研究後,界定出兩個研究重點,一為「資料無縫平滑」,二為「匝道間旅行時間 預測(Ramp to Ramp)」。
本研究使用 Java 程式語言與 MS-SQL 資料庫系統進行系統程式實作開發。
關於研究資料取得,在現行交控系統中,可取得資料可分為兩類型:點偵測資料 研究問題界定
文獻回顧
資料庫建立
歷史資料處理模組開發
旅行時間預測模組開發
.漏失資料插補
.資料融合
.資料平滑與儲存
.短期預測
.長期預測
實驗設計與結果分析
結論與建議
5
與區間偵測資料;前者如國道上設置之固定式車輛偵測器(Vehicle Detector, VD) 之資料,後者如電子收費系統(Electronic Toll Collection, ETC)之扣款資料。
VD 資料特性為偵測項目詳盡、資料蒐集來源密集但故障率高;為了將漏失 值與異常值去除,需先進行資料插補的程序,以確保歷史資料之正確性與完整性。
ETC 的資料特性為準確度高,但是資料蒐集來源數少,且只提供站間旅行時間,
而非用路人需要的匝道至匝道的旅行時間,為了進行匝道至匝道間旅行時間的計 算,必須整合兩種資料的優點,即為資料融合之意義所在。
經過資料融合的程序後必須儲存所產出之結果,而在實務處理上,國道全線 的整日資料量是非常龐大的。為了不使系統資源耗費過大,將會進行交通資料參 數化,將參數儲存於資料庫中,待日後取用時,只需取得參數即可經由演算法還 原出原始資料。參數化同時帶來另一個好處:離散型之原始資料經由參數化後,
即可轉為連續型函數。
6
1.4 研究範圍
本研究使用資料為高速公路局所提供之偵測器資料,以及遠通電收公司提供 之 ETC 資料,對於前述所取得之資料,本節由時間與空間兩個面向來界定研究 範圍。
時間面向,ETC 與 VD 資料之結算週期皆為半小時,每次結算可提供六份五 分鐘資料。但因資料量龐大,為確保資料可靠性,高速公路局以及遠通電收公司 的結算程序皆耗時良久,資料即時更新的效果不佳,目前所能取得最為即時的資 料僅為一小時前的交通資料。故使用 2011 年十二月一日至同年十二月二十八日,
共計 28 天的歷史資料;其中包含一般日 20 天、週末及假日 8 天,一般日定義為 週一至週五,週末則定義為週六及週日。
空間面向,則使用國道一號自汐止收費站(國道里程數 9)至岡山收費站(國 道里程數 346)間之資料;即國道一號最北端之 ETC 收費站至最南端之 ETC 收 費站路段。
圖 1-3 研究範圍示意圖
汐止收費站
岡山收費站
7
第二章 文獻回顧
本章首先瞭解國內外重要單位之先進旅行者資訊系統(ATIS)現況,瞭解系 統所提供之服務項目與其使用限制等情形。
其次,因本研究構建之系統必須處理大量的交通資料,而所獲得之資料經常 會出現資料缺漏的情形,對於此現象而回顧漏失資料插補之技術,以決定資料插 補之方法。
再者,本研究之資料來源為 ETC 及車輛偵測器,為兩種不同來源、不同格 式的資料,處理資料時將使用資料融合技術,因此對於資料融合亦需做一番探討 及了解。
最後,則對於旅行時間預測方面之文獻作探討回顧,以選擇適當的預測方法,
應用於本研究。
2.1 先進旅行者資訊系統 (ATIS)
先進旅行者資訊系統(Advanced Traveler Information Services, ATIS)為智慧 型運輸系統(Intelligent Transportation Systems, ITS)九大服務領域之一。ATIS 乃藉由先進資訊、通訊及其他相關技術,提供旅行者必要之資訊,使其能於車內、
家裡、辦公室、車站等地點方便地取得所需之資訊,作為旅次產生、運具與路線 選擇之決策參考,以順利到達目的地。以下列舉數項國內常見的 ATIS 系統作一 簡介。
8
2.1.1 交通服務 e 網通
「交通服務 e 網通」網站之推動與實施,為依據民國 92 年交通部研擬之「e 化交通」計劃所推行之服務。網站主要包含三個子系統:全國路況資訊中心、陸 海空客運資訊中心,及都市交通資訊中心;提供了路徑規劃(未包含旅行時間預 測)、全國路況資訊、各地公車,捷運及港務局營運者聯絡資訊、台鐵高鐵時刻 表及訂位連結、機場即時動態、各地天氣預報等各類資訊,供使用者於行前上網 查詢。於旅行時間資訊提供方面,目前交通服務 e 網通並無提供相關旅行時間預 測資訊。
圖 2-1 交通服務 e 網通網站路網資訊圖
9
2.1.2 台北市交通控制中心
台北市交通控制中心為台北市交通管制工程處下轄單位。交控中心利用偵測 器和 CCTV 蒐集市區路況資訊,可提供民眾於網路查詢台北市即時交通事件、
各路段 CCTV 即時影像、各處資訊可變標誌(CMS)資訊、各路段車輛偵測器 資訊、重要路段道路速率績效顯示、路徑規劃等服務。台北市交通控制中心網站 提供資訊十分詳盡,但惜未提供旅行時間預測之功能。於旅行時間資訊提供方面,
目前台北市政府交通管制工程處並無提供相關旅行時間預測資訊。
圖 2-2 台北市交通控制中心路網資訊圖
10
2.1.3 交通部高速公路局
交通部高速公路局提供國道一號、二號、三號、四號、五號、六號、八號、
十號及若干快速道路之交通資訊,包括即時影像、即時行車速率、CCTV 資訊、
施工、事件、路網壅塞圖等交通資訊。並依據車輛偵測器資料提供各交流道之間 的旅行時間資訊。透過即時路況語音查詢系統、網際網路查詢系統和資訊可變標 誌等傳播方式給予旅行者相關交通資訊。
圖 2-3 交通部高速公路局路網資訊圖
11
2.1.4 各縣市公車動態資訊系統
國內目前開辦動態公車查詢的單位包括:台北市、高雄市、桃園縣、台南市、
新北市、台中市等縣市。透過裝置於公車的全球定位系統(GPS)計算各路段旅 行時間。資訊發布則是藉由網站、電話語音查詢及手機應用程式等三種渠道。以 雙北市之公車動態旅行時間預測模式而言,一般是採用加權平均法計算平均旅行 時間,由於市區站位間距短且公車班次密集,旅行時間預測多可獲得準確性高之 結果。就雙北市而言,旅行時間預估模式主要是以加權平均法計算之平均旅行時 間值為基礎,由於市區站位間距短且公車數多可獲得準確性之旅行時間預測值。
圖 2-4 台北市公共運輸處公車動態資訊系統
12
2.2 漏失資料插補
資料漏失的普遍認知為:在現實中實際存在的資料,因資料蒐集或測量過程 中發生內部或外部失誤,造成後端蒐集結果具有漏失現象,即稱為資料漏失。
例如車輛偵測器感應通過其上之車輛,測量各項數值,並定期傳送資料回交 通控制中心,將資料寫入中心資料庫紀錄。但若因通訊中斷無法傳輸資料,或是 偵測器故障無法正常蒐集資料,皆會導致中心資料庫裡沒有寫入該筆資料,造成 資料漏失。
J.W.C van Lint 等人於 2003 年,根據荷蘭高速公路控制中心蒐集之資料歸納 出三種造成資料漏失的狀況:通訊或電力中斷(incidental failures)、偵測器故障
(structural failures)以及偵測器偵測誤差(intrinsic failures)。
現今關於車輛偵測器的漏失資料插補研究大致可區分為兩類:離線插補
(Offline interpolation)以及線上插補(Online interpolation)。以下將依據此兩類 型整理相關文獻並回顧之。
2.2.1 離線插補
離線插補為系統觸發其結算期(通常為每日結算),對當日資料存在遺漏值 之時階進行補值,使得資料庫於結算完畢後能完整呈現出當日時階資料序列。目 前已被發表關於漏失資料插補的研究中,大多數使用離線插補,現今離線插補技 術趨勢為兩階段資料處理:第一階段為資料分群,根據資料型別、特性或是其他 映射方式進行分類,找出相關性最大之群組;第二階段為資料插補,依據分群後 之資料特徵,採用各式演算法進行漏失值推估。
Gold et al.(2000)第一階段選用期望最大值演算法(Expectation Maximization Algorithm, EM ) 做 為 車 輛 偵 測 器 之 分 群 技 術 ; 第 二 階 段 採 用 多 項 式 迴 歸
(Polynomial Regression)與核迴歸(Kernel Regression)針對偵測器 5 分鐘與
13
15 分鐘車流量與佔有率進行插補。實驗結果顯示,預先使用期望最大值演算法 之資料分群處理,對插補績效具有顯著的效果。
Chen et al. ( 2001 ) 於 兩 階 段 處 理 中 , 第 一 階 段 以 自 組 織 映 射 圖
(Self-Organising Map, SOM)將資料(車流量、速率、占有率)進行分群;第二 階段 採用自我迴歸移 動 平均法 (Autoregressive Integrated Moving Average, ARIMA)與兩種類神經網路-多層感知器(Multi-Layer Perception, MLP)和輻狀 基底函數類神經網路(Radial Basis Function Network, RBFN)進行插補。實證結 果顯示,SOM/ARIMA 插補績效明顯優於 SOM/MLP 與 SOM/RBFN。
Smith et al.(2004)於資料分群上採用道路服務水準進行分類,並建立出歷 史平均資料庫,同時將相鄰車道與上下游偵測器資料賦予不同資料權重值;第二 階 段 採 用 漏 失 資 料 發 生 的 前 後 一 筆 資 料 之 平 均 值 , 以 啟 發 解 法 ( Heuristic Techniques)、期望最大值演算法和資料擴增(Data Augmentation, DA)三種方法 進行分析,其中資料擴增法的插補績效優於其他兩者。
Huang and Lee(2004)以灰關聯最鄰近法(Grey-based Nearest)作為分群技 術;第二階段再以 k 最鄰近(k nearest neighbors, k-NN)法、多值插補法(Multiple Imputation)與均值替代法(Mean Substitution)進行資料補償。實證結果發現,
k-NN 法優於其他兩者,同時指出良好的分群技術可提升插補績效。
Li et al. (2009) 於第一階段處理採用主成分分析法(Probabilistic Principal Component Analysis, PPCA),對市區幹道之 50 個偵測器之歷史資料進行分析,
擷取關聯性最高之歷史資料;第二階段則選用最大概似法(Maximum Likelihood Estimation , MLE)對漏失值進行插補,分別與最鄰近歷史資料(nearest historical)和平均值與迴歸分析法進行比較。結果發現,以經由主成分分析法之 分群處理可大幅提高資料準確程度。
邱孟佑與汪進財(2010)藉由資料採集技術與統計迴歸分析建構一套高速公 路旅行時間的預測模式。此模式蒐集之資料包括線圈偵測器(VD)與電子收費
14
系統(ETC)之歷史資料。首先對線圈偵測器之歷史資料進行插補,插補程序以 集群分析方法對每個線圈偵測器之歷史資料作交通狀態分類處理,再根據某偵測 器所代表之次路段結合整體路段 ETC 之旅行時間來建立整體迴歸關係,並依照 不同遺漏時窗多寡來選用不同插補方法,如歷史均值法、移動平均法(MA)、分 類迴歸樹(CART)。接著,以 ETC 車輛通行於收費站間之通行資料所計算出之 旅行時間,作為旅行時間預測模式之校估依據。模式結果顯示其有相當良好之預 測能力。
林鈺翔(2010)探討使用偵測器關聯之時間、空間資料插補漏失值,欲尋求 最佳漏失資料插補組合。此研究第一階段使用 K-means 將偵測器資料分群,再以 回饋式類神經網路針對流量、速率及佔有率進行漏失值插補績效實證分析。
許程詠(2011)使用灰預測理論不需符合統計分配的優點發展漏失值插補方 法。此研究比較灰預測法 GM(1,1)和最小循環式殘差修正法(Minimum Recursive Residual GM(1,1), MRRGM(1,1))在不同資料遺失比例和不同遺漏情境下的插補 結果。實驗結果顯示當遺失比例高和插補次數多時,插補法 MGGRM(1,1)之插補 績效可優於 GM(1,1)法。
2.2.2 線上插補
Peeta 及 Anastassopoulos(2002)導入頻率分析技術的傅立葉轉換,偵測並 修正連線式交通控制系統中的錯誤資料,其利用歷史資料以及漏失資料發生當時 稍早的當日資料,發展具強健性(Robust)的插補方法,供即時交通控制系統能 逐分地預測交通參數,包含流量、速率及佔有率,並在交通參數發生錯漏時即時 進行補償;但根據 Huang(1998)等人的研究指出,Peeta 和 Anastassopoulos 等 人研究成果是將一連串的訊號經由傅立葉轉換所得之頻域資料,並無法展現訊號 頻率或能量隨時間變化的關係,故應用於非線性系統的訊號分析時,難以察覺短 暫且突然的頻率改變對系統所發生的影響。況且,動態系統所需之短期交通量資
15
料的時間序列常具有非線性或是混沌的特性,故傅立葉轉換在處理即時交通控制 系統突然且短暫發生少數漏失資料時,可能難以即時察覺並加以補救。此外,
Peeta and Anastassopoulos 的研究並未進一步廣泛地探討不同漏失比例或長時間 接連發生漏失資料之插補問題。
J.W.C van Lint 等人(2005),使用 state-space neural network(SSNN)進行 資料插補來預測短期旅行時間,使用 FOSIM 模擬與實際車流資料來進行資料漏 失下之插補績效評估,FOSIM 模擬路段長度 8.5km,切分為 12 區段,偵測器收 集之數據有速度、流量,每分鐘結算此區段偵測器之數據,類神經網路初始化變 數為 228 個,在資料漏失比率為 40%下,使用類神經網路結合移動平均法(Moving Average),其 RMSEP 為 9%,在實際車流應用上,在荷蘭 A13 公路上的 Rotterdam Airport 至 Rijswijk,全長 13 公里,每 500 公尺設置感應線圈量測速度、流量。
張堂賢、黃宏仁(2008)利用歷史平均資料、傅立葉轉換平均資料、α-β-γ 濾波器結合歷史平均資料、α-β-γ 濾波器結合傅立葉轉換平均資料等四種方法進 行資料漏失插補,在漏失資料比例為 20%以下,使用 α-β-γ 濾波器結合歷史平均 資料、α-β-γ 濾波器結合傅立葉轉換平均資料進行插補,明顯提升插補績效,同 時使用α-β-γ 濾波器具有考量歷史資料及漏失資料發生時稍早的資料走勢,且能 進行線上即時插補之優點。
16
表 2-1 漏失值插補文獻回顧整理表
年代 作者 插補方式 特點
2000
Gold
&
Bentler
離線插補 分群處理:期望最大值演算法之資料 漏失值補償:多項式迴歸與核迴歸 2001 Chen
et al. 離線插補 分群處理:自組織映射圖分群 漏失值補償:ARIMA、類神經網路 2004 Smith
et al. 離線插補 分群處理:道路服務水準 漏失值補償:前後一筆資料之平均值 2004
Huang
&
Lee
離線插補
分群處理:灰關聯最鄰近法 漏失值補償:k-NN 法、多值插補法、均
值替代法 2009 Li
et al. 離線插補 分群處理:主成分分析法 漏失值補償:最大概似法 2010 汪進財、邱孟佑 離線插補
分群處理:交通狀態分類
漏失值補償:歷史均值法、移動平均法、
分類迴歸樹 2010 林鈺翔 離線插補 分群處理:K-means
漏失值插補:回饋式類神經網路
2011 許程詠 離線插補 灰預測理論
2002
Peeta
&
Anastassopoulos
線上插補 利用歷史資料以及漏失資料稍早的 當日資料配合傅立葉轉換補償漏失值 2005 J.W.C van Lint
et al. 線上插補 FOSIM 模擬,類神經網路 結合移動平均法插補
2008 張堂賢、黃宏仁 線上插補
歷史平均資料插補、
傅立葉轉換平均資料插補、
α-β-γ 濾波器結合歷史平均資料插補、
α-β-γ 濾波器結合傅立葉轉換平均資料插 補
資料來源:本研究整理
17
2.3 資料融合
資料融合的主要目的為將來源不同、格式相異的資料,經由演算法的處理,
成為規劃者所需之資料類型。在交通工程方面,一般資料來源不外車輛偵測器、
影像偵測器、探針車(Probe)或是電子收費系統等設備。透過資料融合技術篩 選上述資料並進行融合過程,可將處理過後的有效資料提供給交通控制中心進行 控制策略擬定,或整理彙集成交通資訊向用路人發布。
吳金杰(2005)之研究中融合車輛偵測器與探針車資料,運用類神經網路構 建雙資料來源之類神經資料融合旅行時間預測模式,進而探討不同流量型態、不 同資料收集時距、不同探針車比例等相關參數之實驗組合,再以真實資料對模式 輸出結果進行驗證。模式結果驗證依據 Lewis 對 MAPE 值的分類可歸類於高精 準預測。
李穎(2007)的研究中使用的資料來自裝有全球定位系統(GPS)設備的國 道客運班車運行資料、迴圈式車輛偵測器之車流資料以及事件資料庫之事件資料,
利用上述資料融合並進行旅行時間預測。此研究討論了不同資料來源融合下的旅 行時間預測值的預測績效。並另有討論資料組合、資料集群以及基因演算法等三 種資料簡化方法對於模式績效的影響以及分析比較事件發生與未有事件發生時 的模式績效。
何旺宗(2010)將車輛偵測器資訊與警察廣播電台提供的道路事件資訊,進 行數值格式統一與資料過濾,經過資料融合的程序以供後續類神經網路預測模式 使用。事件延時預測模式績效之 MAPE 值為 26.53%,為合理預測值。
18
表 2-2 資料融合文獻回顧整理表
年代 作者 融合資料來源 研究方法 模式目的
2005 吳健生、吳金杰 車輛偵測器/探針車 類神經網路 旅行時間預測 2007 魏健宏、李穎 探針車/車輛偵測器
/事件資料庫 類神經網路 旅行時間預測 2010 魏健宏、何旺宗 車輛偵測器/
廣播電台事件資訊 類神經網路 旅行時間預測 資料來源:本研究整理
2.4 旅行時間預測
高速公路因具車種單純、車流狀態穩定、方向性車流明確、無號誌干擾、偵 測器資料相對完整、旅行距離長等特性,國內、外關於旅行時間預測之研究多以 高速公路為對象。結合不同偵測方式(固定式偵測器與移動式偵測器)及交通環 境(事件發生、幾何設計)獲得相關交通參數來進行旅行時間預測。以下根據統 計方法、交通工程學與控制工程學等領域進行文獻回顧與分析。
2.4.1 車流理論
從車流行為角度做為演算基礎,根據巨觀、微觀車流分類,其操作變數可包 含道路幾何型態、號誌時制計畫、尖離峰流量變化、路側活動與行人干擾,甚至 駕駛人特性等等,但基本上利用基本車流理論的流量-密度-速度(Q-K-U)的 交互關係式及等候分析 (Queuing Analysis) 與衝擊波分析 (Shockwave Analysis)
之巨觀模式,結合上、下游車流關係,推估該時間點路段之平均旅行時間,亦或 透過單一車輛偵測器蒐集之交通參數推估路段旅行時間。
Oh 等人(2002)利用流量守恆的觀念,發展推估路段旅行時間之模式。文 獻中資料的來源為點偵測器,透過車流之時空關係,將偵測器所回傳之資料利用 流量-密度-速度之關係式加入系統流量均衡參數來轉換為路段旅行時間,其研究 同時採用車流模擬軟體之輸出資料與加州 I-880 高速公路之現場調查資料進行
19
模式之實證分析,研究結果顯示其誤差一般在 3%以內。Oh 模式廣泛地應用於 國外相關車流資料,不論以車流模擬軟體輸出資料或真實調查資料作為輸入項,
均有相當良好的結果;董啟崇與胡守任亦曾選用 Oh 模式作為研究模型的基礎,
於實證分析結果顯示該模式在國內特定的交通環境與都市幹道亦適用。
Nam and Drew(1998)推估高速公路擁擠情況下之旅行時間,研究中以等候 分析 (Queuing Analysis) 與衝擊波分析 (Shockwave Analysis) 之巨觀模式 為分析基礎並比較兩個模式的適用性。研究結果發現兩個模式為交通基礎模式;
另外,等候分析與衝擊波分析相比,等候分析之旅行時間值會低估於所有延滯公 式之旅行時間值。
Paterson 與 Rose (2008)等人於 2008 年將路段依據偵測器設置位置,劃 分為各個細胞路段(cell),配合巨觀車流模式與確定性排隊理論,以車輛速度和 路段長度來推估旅行時間。文獻中引入車流延滯概念,採用特定路段延滯的疏解 處理時間等於車輛數除以該特定路段的最大流出率來進行推算,並透過實驗路段 - 澳 洲 Melbourne 高 速 公 路 進 行 實 測 , 研 究 結 果 顯 示 以 遞 迴 細 胞 程 序 模 式
(Recursive Cell Processing Model)為最佳估算模型。
2.4.2 類神經網路模式
類神經網路乃是利用人工神經元模仿生物神經元的運作,是由很多非線性的 運算單元(神經元 Neuron)和位於這些運算單元間的眾多連結所組成,以高度 學習能力及容錯修正能力來應用於判斷與預測的工作,並以平行且分散的方式作 運算,如此可以同時處理大量資料,並應用於各種需要大量資料運算的程序。交 通運輸領域常見應用於運量預測及旅行時間議題分析上。
Singh(1996)等人採用 SSNN(State-Space Neural Network)系統狀態類神 經網路進行號誌化路網路段旅行時間預測,其操作變數包含巨觀車流之車流量、
20
速度以及微觀車流之號制時制計畫與路口間號誌時差來進行推算,實證結果發現 可於長期的歷史資料訓練下獲得高精準的旅行時間推估結果。
Park, Rilett, and Han(1998)研究中指出,欲建置成功的路徑導引系統,所 需之資料包括歷史資料和即時資料,而且需具備能預先通報旅行時間資訊的能力。
其研究試驗了類神經網路模式、卡曼濾波器、指數平滑、歷史資料剖析、即時資 料剖析。試驗結果發現,類神經網路模式具有較佳之預測能力。
Dia(2001)利用類神經網路模式進行短期旅行時間之預測工作,提出物件 導向網路模型(Objected-oriented neural network)的概念並利用 Time-lag Recurrent Network (TLRN)實作,以感應式偵測器蒐集 Pacific 高速公路之交通資料,
分析範圍為 1.5 公里長之路段,約每隔 500 公尺佈設偵測器,並以流量和速度 為模式輸入項,旅行時間為模式輸出項,建立輸入項與輸出項間之對映關係
(Mapping)後,可預測未來 20 秒至 15 分鐘之旅行時間,其研究結果顯示預測 準確率約 90%。
李穎(2001)應用類神經網路於國道客運班車的旅行時間預測模式,以西螺 至永康交流道約 89 公里為研究範圍,並將預測模式的輸入變數來源訂定為三大 類:客運車輛 GPS 資料(時段、星期、目前車速等參數)、.車輛偵測器資料(現 在時刻之佔有率、現在速度等參數)及事件資料(本切分路段現在時刻存在之總 事件數、本切分路段現在時刻存在之各類型事件數等參數)。取得三類的變數來 源資料後,建構出綜合、客運 GPS 資料配合車輛偵測器資料、客運 GPS 資料配 合事件資料等三種資料融合模式,再分別與四種路段切分法搭配,以倒傳遞法取 一層隱藏層得到每一種組合狀況下的旅行時間預測值。研究結果顯示,總體資料 融合建構的旅次時間預測模式,個別模式之平均絕對誤差( Mean absolute percentage error, MAPE)值範圍在 2.7~26.2 之間,各切分路段方式 MAPE 值約在 12.4%~16.7%之間,是屬於預測績效優良且合理的旅行時間預測模式。其切分法 中以旅行時間約 1300 秒來切分路段所建構的旅行時間預測模式平均誤差最低。
21
以客運 GPS 資料-事件資料融合之旅次時間預測模式中,有些路段模式 MAPE 績 效大於 20%,但整體仍屬於預測績效優良且合理的旅行時間預測模式,此資料融 合法以簡單幾何條件切分路段建構模式平均誤差最低。以車輛偵測器資料-事件 資料融合之旅次時間預測模式亦屬於預測績效優良且合理的旅行時間預測模式,
其以相同旅行時間長度切分路段方式模式誤差最小。而最終仍以總體資料融合模 式表現最為穩定,並証明不論何種資料融合模式,當個別切分路段距離增長時,
其旅行時間預測誤差將會明顯減少。
張修榕(2001)利用車流模擬方式產生交通資料,並配合類神經之倒傳遞演 算法來建立不同流量型態、偵測器間距之高速公路旅行時間預測模式,期望能透 過偵測器所偵測之交通資料,提供精準之旅行時間預測。研究結果顯示,其旅行 時間預測模式是屬於高精準預測之模式,其均方差平方根(Root mean square error, RMSE)值為 5%以內。研究以模擬資料為模式輸入資料,但在未來實務應用上 之真實性與變異性的掌握仍顯不足。
其後續研究仍利用類神經網路模式,並加入其他車輛偵測器進行探討。例如:
李季森(2002)針對用路者之變換車道行為與變換車道時間進行探討,另外以探 針車蒐集之交通資料,針對不同預測時間、探測車混合比例、流量型態與預測時 間等四項影響變數,透過倒傳遞演算法進行旅行時間預測,其結果得知旅行時間 預測模式是屬於高精準預測之模式 RMSE 值約為 6%。
魏健宏等(2003)依高速公路幾何特性與交通瓶頸特性分成數個群組路段,
分別蒐集車輛偵測器(如速率)、高速公路道路幾何型態資料(如車道數、匝道 數、收費站)、交通量調查與國道客運車輛 GPS 資料(如旅行時間、速度)和時 間資料(如假日、非假日、尖離峰)等資料。研究中將個別群組路段依不同資料 來源、不同輸入變數組合各自建立類神經網路預測模式,探討單一資料來源(如 VD 與 GPS 資料)或融合多樣資料來源(如國道客運 GPS 資料、車輛偵測器、
事件、交通幾何特性、上游路段交通狀況等)之預測能力。研究結果顯示運用類
22
神經網路模式於 1 公里至 70 公里的路段長度皆能提供穩定預測結果。各模式之 旅行時間平均每車誤差值約在 4.5%~8.5%之間,其中以融合多樣資料來源的 ANN6 類神經網路最為穩定且預測能力佳。
2.4.3 統計方法
Arem(1994)等人在 GERDIEN 計畫中提出一套路網監測與預測系統 NSMP (Network State Monitoring and Prediction system),NSMP 利用感應式迴圈偵測器 進行數據蒐集, 並以自我迴歸與移動平均模式 ARMA(Autoregressive Moving Average Model) 建構預測模型,提供每分鐘、每車道連續的交通狀態資料,資料 內容包含:速率、流量、佔有率等。整體預測模型可推估 3 至 5 公里長之高速公 路的路段旅行時間,並依據路段壅塞狀態與否,切換不同的預測程序。若路段為 壅塞狀態下,預測基礎採用流量守恆模式進行推估,導入速度門檻值、路段容量 下的車輛疏解率以及觀測樣本數據進行旅行時間預測;若路段狀況為非壅塞狀態 時,則直接估計路段旅行時間。
Matsumura(1998)等人則提出利用動態路徑導引系統提供資訊,使駕駛人 可以選擇最佳路徑,該研究有關旅行時間預測模式是利用歷史資料庫的統計旅行 時間值和現行觀測值進行比對,推估出下個時階的旅行時間。該研究同時將一個 路徑(Path)分成多個路段(Links),並以 5 分鐘為時間間隔加以推估。
Zhang and Rice ( 2003 ) 研 究 中 提 出 線 性 時 變 係 數 模 式 ( Time-varying coefficient, TVC)預測短期旅行時間,模式結合歷史平均旅行時間值和即時旅行 時間方法。在即時旅行時間方法計算方面,研究指出真實旅行時間和瞬時旅行時 間為一線性關係式。真實旅行時間為進入路段起點至到達路段迄點所花費之實際 旅行時間。透過固定式車輛偵測器之速率和路段長度可求得瞬時旅行時間,線性 模式的截距和係數皆依時間而變化,最後以遞迴最小平方法推估截距與係數。研 究使用兩個不同地區偵測器資料,第一部分地點為美國 I-880 高速公路,蒐集資
23
料包含浮車和雙環路線圈偵測器資料,平均絕對預測誤差( Mean absolute percentage prediction error, MAPPE)為 5%至 10%,由於資料規模較小因此有不 錯的預測結果。第二部分則為洛杉磯地區,若無偵測器資料傳輸至中心端延遲現 象產生,模式誤差為 8%。
D'Angelo 等人、Kwon 等人以及 Rice 等人皆應用線性或非線性時間序列模 式技術,其操作參數包括了:流量、密度、佔有率、出發時間與日期型態 (day of the week),總體的實證經驗上得知,即時資料預測高速公路旅行時間可得到較好 的預測績效,但在進行長期時階預測情形時,採用歷資料預測高速公路旅行時間 可得到較好的預測績效。
卓訓榮等人利用我國電子收費系統之歷史資訊及高速公路偵測器所收集到 的即時與歷史交通資訊進行速度與流量分析,採用 KNN 演算法(k-Nearest Neighbor Method)對路段旅行時間進行預測,並考量在不同偵測器下交通特徵的 差異,導入偵測器的權重以進行交叉分析。解析出不同的資料分群下的準確率提 升績效。
許雅惠(2004)利用 PARAMICS 模擬實驗為基礎,以 Oh and Recker(2001)
提出的車流理論模式進行資訊轉換,此模式是利用上、下游兩偵測器在即時提供 之點資訊中推算路段平均密度,當速率與密度兩變數皆已知時,進行資訊轉換以 利轉換函數模式推估旅行時間,最後搭配時間序列的滾動平面法進行離線旅行時 間預測。研究以模擬資料為模式輸入資料,但在未來實務應用上之真實性與變異 性的掌握仍顯不足。
邱孟佑與汪進財(2010)藉由資料採集技術與統計迴歸分析建構一套高速公 路旅行時間的預測模式。此模式蒐集之資料包括線圈偵測器(VD)與電子收費 系統(ETC)之歷史資料。以 ETC 車輛通行於收費站間之通行資料所計算出之 旅行時間,作為旅行時間預測模式之校估依據。此研究所構建迴歸模式乃以兩收 費站之電子收費通行車輛所計算之旅行時間與該區間之各次路段旅行時間為基
24
礎,理論上透過偵測器蒐集之交通資料推估路段之旅行時間,其結果應與 ETC 車 輛旅行時間一致,然而觀測結果並不一致。但因兩者所對應之交通狀況基本上是 一致的,可預期其間必有相當高之相關性;該路段旅行時間應為自由流下之旅行 時間,加上車流於路段上延誤時間之和,以此一觀念以及等候理論之應用,發展 出一遞迴推估路段旅行時間之方法。模式結果顯示其有相當良好之預測能力。
2.4.4 卡曼濾波
卡曼濾波器技術乃為控制系統理論裡廣泛使用於系統狀態估計、預測(State Estimation and Forecasting) 與軌跡追蹤 (Signal Tracking)之技術,根據適當的狀 態方程式與量測方程式設計,卡曼濾波器即可成為旅行時間成本預測工具。
Chen 與 Chien(2001)採用卡門濾波演算法進行旅行時間之預測,以紐澤 西洲 I-80 公路做為研究區域,選取 I-80 公路中含有 5 個匝道之路段,分為 9 個節點 (node) 與 8 個節線 (link),利用 CORSIM 車流模擬軟體建立出與現實 交通車流狀態相似之車流資料,配合抽樣模擬資料建立預測模式,進行每 5 分 鐘進行預測,預測模式分為 Path-based:貣點至終點的旅行時間,以及 Link-based:
各節點之間的旅行時間,但其模式並非採用真實交通環境之資料,亦無考慮事件 對於旅行時間之影響,故仍有改善空間。
Chandra And Steven(2002)應用卡曼濾波理論進行旅行時間之預測,採用 設計時階內 85%之車輛平均旅行時間做為觀測值輸入,更新狀態方程式來進行卡 曼濾波器滾動預測。由於旅行時間具高度隨機性且因時段之不同而有所差異,該 研究整合即時、歷史旅行時間資料各優點,發展為複合型預測模式(Hybrid Model),依據不同的時區的預測需求,有效率地結合即時、歷史旅行時間資料,
採取各時區中預測績效較好的模式,達到績效最佳化(Optimal Performance)目 的。
25
Kaan (2001)等人於研究中認為旅行時間受許多因素影響,如交通量、道 路幾何情況、速度限制、事故、車輛組成和天氣狀況等等,要建立這些參數間的 關係極為困難,尤以交通量趨近於道路容量時最具挑戰性,也因此其研究採用卡 曼濾波理論,以根據 microscopic traffic simulation 所產生之模擬交通資料與真實 偵測器蒐集之速度、交通量估計值資料相融,使狀態方程式獲得持續更新。而模 擬模式透過調整跟車敏感程度、路徑變化反應與期望自由車流速度等參數,反應 其真實的交通運作狀態並加以對旅行時間成本進行預測輸出。
Chien and Kuchipudi(2003)以紐約州高速公路為主要研究對象,選取其中 5 個固定式偵測器,分為 5 個節點與 4 個節線,固定式偵測器紀錄車輛編號、日 期、通過時間和偵測器編號,因此可記錄每個路段旅行時間。研究中使用卡曼濾 波演算法進行旅行時間預測,每 5 分鐘進行一次預測,其預測模式分為以路徑基 礎(Path-based)和以路段基礎(Link-based)之旅行時間預測模式。路徑基礎為 計算起點至終點的旅行時間;路段基礎為計算各節點之間的路段旅行時間和。研 究主要探討以即時或是歷史旅行時間為輸入資料之模式的績效表現,在歷史旅行 時間的部分,探討資料取樣天數與模式預測誤差關係,研究中發現,蒐集較多個 工作日資料以及以即時資料輸入的預測績效表現最好。研究結果發現,上午尖峰 之歷史旅行時間為輸入資料情況下,路徑基礎模式績效優於路段基礎模式,由於 路徑基礎之旅行時間變異較小且蒐集之樣本數多的原因,所以路徑基礎預測旅行 時間績效值較好,整體而言卡曼濾波演算法之預測值績效良好。
2.4.5 頻率分析技術
工程數學領域中,訊號分析技術多使用傅立葉模式進行頻率分析,該模式可 描繪出旅行時間歷史資料曲線,有效掌握過去資料之變化趨勢並加以應用於未來 可能之變化預測之用。
26
郭中天(2002)採用傅立葉轉換技術將目標公車之 GPS 資料與 GIS 系統 加以整合,有效掌握公車到站時間與離站時間資訊。透過歷史資料和即時資料之 蒐集建構公車各路段之旅行時間資料庫,經由遞迴最小平方法的短期旅行時間預 估模式和傅立葉變換之長期旅行時間預估模式演算加以結合,提供旅客可靠的公 車到站資訊。資訊提供的對象包括已在公車上之乘客、正欲前往搭車之乘客或未 來長期欲搭車之乘客。在長期公車旅行時間預估模式中,應用動態隨機性旅行時 間模式計算旅行時間之期望值與變異數,並利用快速傅立葉變換有效推估出函數 型態,可掌握平均旅行時間之動態變化。研究結果顯示長期公車旅行時間預估模 式所得之 MAE 會隨著預測站數之增加誤差也跟著增大,而 MAPE 則會隨著預 測站數之增加,其值越小。模式除在預測單站時 MAPE 較大,其餘均小於 20% , 屬良好預測結果。另外,研究中亦透過模式績效分析界定長期與短期模式公車旅 行時間預估模式之分界點,其分界點訂為三十五分鐘,亦即旅客欲在三十五分鐘 內搭乘公車時,則建議以短期模式運算結果提供資訊,反之亦然,如此提供可靠 公車動態資訊。
27
表 2-3 旅行時間預測文獻回顧整理表
年代 作者 理論 特點
1998
Nam
&
Drew
車流理論 等候分析與衝擊波分析之巨觀模式。
2002 Oh et al. 車流理論
使用流量-密度-速度之關係式加入 系統流量均衡參數來轉換為路段旅行時
間。
2008
Paterson
&
Rose
車流理論
依偵測器位置劃分細胞路段,配合巨觀車 流模式與確定性排隊理論,以車輛速度和
路段長度來推估旅行時間。
1996
Singh
&
Harmancioglu
類神經網路 SSNN (State-Space Neural Network)
1998 Park, Rilett, &
Han 類神經網路
比較類神經網路模式、卡曼濾波器、指數 平滑、歷史資料剖析、即時資料剖析等數
種模式。
2001 Dia 類神經網路
以流量和速度為模式輸入項,
旅行時間為模式輸出項,
建立輸入項與輸出項間之對映關係。
2001 李穎 類神經網路 倒傳遞類神經網路
2001 張修榕 類神經網路 以車流模擬方式產生交通資料 2002 李季森 類神經網路
對不同預測時間、探測車混合比例、流量 型態與預測時間四項變數,
使用倒傳遞演算法進行旅行時間預測。
2003 魏健宏 類神經網路
蒐集車輛偵測器、高速公路道路幾何資 料、國道客運車輛GPS 資料與時間資料。
探討單一資料來源及融合資料來源之預測 能力。
1994 Arem
et al. 統計方法 使用感應式迴圈偵測器進行數據蒐集,並 以ARMA 建構預測模型
28
表 2-3 旅行時間預測文獻回顧整理表(續)
年代 作者 理論 特點
1998 Matsumura
et al. 統計方法 使用歷史資料庫與現行觀測值進行比對,
推估出下個時階的旅行時間 2003
Zhang
&
Rice
統計方法 以遞迴最小平方法推估真實旅行時間和瞬 時旅行時間之線性關係式
2004 許雅惠 統計方法
利用上、下游兩偵測器路段平均密度,將 速率與密度兩變數進行資訊轉換,後以函
數模式推估旅行時間。
2010 邱孟佑 統計方法
以ETC 車輛通行於收費站間之通行資料所 計算出之旅行時間,作為旅行時間預測模
式之校估依據。
2001
Chen
&
Chien
卡曼濾波
利用車流模擬軟體建立出與現實交通車流 狀態相似之車流資料,配合抽樣模擬資料
建立預測模式。
2001
Kaan
&
Altintas
卡曼濾波 以模擬之交通資料與真實偵測器蒐集之交 通資料相融,使狀態方程式持續更新。
2002 Chandra
et al. 卡曼濾波
複合型預測模式,依據不同的時區的預測 需求,採取各時區中預測績效較好的模
式,達到績效最佳化。
2003
Chien
&
Kuchipudi
卡曼濾波 預測模式分為路徑基礎和路段基礎兩種旅 行時間預測模式。
2002 郭中天 頻率分析
以歷史資料和即時資料建構公車之旅行時 間資料庫,結合短期旅行時間預估模式(使
用遞迴最小平方法)和長期旅行時間預估 模式(使用傅立葉變換)
資料來源:本研究整理
29
第三章 研究方法
經由前章文獻回顧後,為求得良好之旅行時間預測結果,本研究將對於資料 插補、資料融合及旅行時間預測等程序,分別選擇適用之研究方法。
3.1 資料插補
想要取得良好的預測結果,必先仰賴於結構完整、分布合理且來源可靠的歷 史資料,國道上所佈設的車輛偵測器(Vehicle Detector, VD)可提供預測所需之交 通資料,包括流量、速度、佔有率…等項目。但在實際狀況中,車輛偵測器 VD 的資料並不如理想中完整,原始歷史資料中可能包含許多遺漏值以及異常值,統 稱為無效資料。而無效資料的成因可能為機器故障、通訊傳輸斷線或是程式異常 等等,這些情況皆可能造成回傳的資料產生遺漏或是誤植異常值。
假若歷史資料中包含過多的漏失值及異常值,所描述的歷史交通狀況即會失 真,據此歷史狀況所預測之結果亦會失準。因此在進行預測之前,必須將歷史資 料之遺漏與異常值以合理可靠的數據取代。
本研究係依靠國道上佈設之 VD 偵測各地點車輛瞬時速率以推估國道旅行 時間,在插補邏輯中引用中央極限定理的特性,將同一路段中各偵測器之數據視 為由同一母體取得之樣本,則所取得數據分布應服從常態分配。藉由常態分配的 特性,計算樣本平均值與樣本標準差,而後篩選出離群值(異常值)而以合理值 取代。
根據前述文獻回顧,本研究之漏失資料插補方法選用線性插補法;線性插補 法之優點為運算效率高,演算時間短,且具備數值趨勢之觀念。運算公式簡述如 下:
30
由線性關係
0 1
0 1
0 0
x x
y y x x
y y
,可推得 0 00 1
0
1 (
x x
)y
x x
y
y y
,其中 ,x y 為漏
失值當期參數;
x y
0,
0為漏失值前一期之有效資料參數;x y
1,
1為漏失值後一期之 有效資料參數。3.2 資料融合法
旅行時間預測演算模型,最終目的為預測用路人自上匝道起至下匝道止,所 花費的旅行時間,提供用路人參考。如前小節所述,想要取得良好的預測結果,
必先仰賴於結構完整、分布合理且來源可靠的歷史資料。現今可取得的國道旅行 時間相關資料,以準確性而論,準確性最高的資料為電子收費系統(Electrical Toll Collection, ETC)扣款資料;而以泛用性而論,車輛偵測器(Vehicle Detector, VD)
所提供之車輛速率資料,亦可供參考換算旅行時間。
VD 資料特性為資料項目詳盡、資料蒐集來源密集但故障率高;國道上的 VD 佈設密度相當高,佈設密度雖因區域而異,但原則上每五百公尺至一公里的 距離即會布設一組 VD,因此,本研究將 VD 區間視為國道的最小單位,以此推 斷國道上的交通行為。國道一號全線共設置有 540 組 VD,但在所取得的 VD 資 料中,約有 100 組左右的偵測器為故障偵測器,所回傳之資料常為異常值或漏失 值,故需先經過資料插補後方可使用。相對而言,ETC 的資料特性即為準確度 高,但是資料蒐集來源少;ETC 資料比對相同車輛通過不同收費站的時間點,
來計算兩收費站間的旅行時間,排除掉車輛進入休息區或是於中途下匝道等例外 情形,此種旅行時間計算方法是相當可靠的,但以現行 ETC 計次收費的形式,
收費站數目稀少(國道一號全線共 10 站),收費站至下一相鄰收費站的距離是相 當遙遠的,所提供的旅行時間紀錄為長距離紀錄,對短程旅次參考性不高;另,
ETC 系統提供的旅行時間為收費站至收費站的旅行時間,而非用路人希望的匝 道至匝道的旅行時間。
31
另外,兩種資料在測量形式上亦有差異,VD 所測得之資料為點資料(Spot data),為一時一地所測得之瞬時資料;而 ETC 資料屬空間資料(Space data),
是以兩點以上的資料來源推算區間平均資料。一般情況下,點資料型式的數據會 大於空間資料型式,例如路段上所測得之車輛瞬時速率會大於整路段的旅行平均 速率。兩種形式的資料差異係因測量方式不同所導致,各有其意義存在,且此兩 型式資料之間有一定的關聯性。
本研究為了進行匝道至匝道間旅行時間的計算,整合兩種資料的優點:ETC 資料在長距離的旅行時間計算十分可靠,VD 資料則可將國道細分為許多小區間 描繪交通行為,細緻的表現各區間的速率變化。
3.3 傅立葉轉換法
在實務處理上,國道全路段的整日資料量是非常龐大的。如原始資料不作任 何處理便即儲存,不但相當耗費系統資源,在將來取用資料時也不甚方便。
本研究採用離散時間傅立葉轉換法(DTFT,Discrete-time Fourier Transform), DTFT 是傅立葉轉換的一種,以不同頻率的餘弦波函數不斷疊加,轉化出一條連 續型的頻率域曲線,擬合(fit)原始離散型的時間域資料。在擬合時為免傅立葉 轉換曲線與原始資料間之誤差過大,將設定一個誤差限度,傅立葉轉換程序將不 斷疊加擬合,直至與原始資料之誤差小於此限度後才會停止。
傅立葉原理的大意為:任何連續的信號,都可以表示為不同頻率的正弦波或 餘弦波的無限疊加。而根據該原理引申出的傅立葉轉換法,則是利用直接測量到 的原始信號,以累加的方式計算該信號中不同正(餘)弦波的頻率、振幅以及相 位。
從純粹的數學意義上看,傅立葉轉換是將一個函數轉換為一系列的週期函數 累加來處理;而從物理意義說明,則是將信號由時間域(Time domain)轉換到 頻率域(Frequency domain),或是利用其逆轉換,將信號由頻率域轉換回時間域。
32
頻率域中F
與時間域中 f
t 互相轉換的公式為:
i2 tF f t
f t e
dt
F
1 2
( ) [ ( )] ( )
i tf t
F
F e
d
F
上述二式為連續型訊號之轉換,但由於交通資料在時間域中並非連續型資料,
因此必須使用離散時間傅立葉轉換法(DTFT),將離散型的時間域資料轉換為連 續型的頻率域資料。
若 f
t 具有週期性,且已知一週期上的 N 個樣本,並對時間間隔 t
進行波 形抽樣,則可將 f
t 之離散傅立葉變換定義為:
1
0
/ 2 N
k
N kn
e
it k t f
N
F n
其中,
n
0,
1,
, N
1 而其逆變換對為:
1
0
1 N 2 n
N / kn
e
it N F n t N
k
f
其中,
k
0,
1,
, N
1首先透過正變換的計算將時間域資料轉換為頻率域資料,此頻率域資料可表
示為實部與虛部之共軛複數組合,意即
t N F n
可表示為複數型式:cos sin
i n N t
n
n n n
F R iX
N t N t N t
n n n
F i
N t N t N t
F n e F
N t
再由下列公式計算振幅與相位角:
振幅:
2 2
t N X n t N R n t
N F n