100 年度發展與應用多平台 遙測製圖技術工作案
工作總報告書 修訂本
計畫主持人:江凱偉 副教授 共同主持人:曾義星 教授
楊 名 教授 詹紹勳 副教授 饒見有 助理教授
委託單位:內政部
投標單位:財團法人成大研究發展基金會
執行單位:國立成功大學測量及空間資訊學系
中 華 民 國 1 0 0 年 1 2 月 2 3 日
中文摘要
現有空間資訊系統之效益建構在系統空間及屬性資料時效性以 及正確性,並藉此發揮它的功能並表示真實世界的現象。然而,傳統 測量以及屬性調查作業從開始收集資料到系統建置完成往往需要半 年以上的時間,已不符合科技發展的趨勢與成本效益。近年來測量與 空間資訊技術正在逐漸革新,移動遙測製圖系統結合攝影測量製圖的 技術與精密整合式定位定向系統,搭配多種的數位影像感測器來收集 空間資料,逐步實現快速即時移動式測量及空間資料收集技術。
自主研發適用不同平台之移動遙測製圖技術為各國發展移動遙 測製圖技術之理想目標,本案彙整多平台定位技術相關資料、合法引 進 具 備 高 階 光 纖 陀 螺 儀 之 慣 性 測 量 儀 , 並 自 行 研 製 含 軟 體 之 INS/GNSS 整合式定位定向系統;以近半的成本下能夠提供與商用系 統相匹敵之定位定向精度,並進一步評估引進及建立國內慣性測量儀 之 標 準 率 定 程 序 並 透 過 國 際 公 認 的 標 準 測 試 程 序 與 設 備 進 行 INS/GNSS 整合定位定向系統規格測試與分析,成功開發設計具顯著 效益之新解算模式定位定向演算法等關鍵技術,並利用這些基礎建置 空間資訊整合展示平台。同時針對發展空載傾斜攝影定位系統技術與 建置個人攜帶式定位系統之可行性初期評估與規劃,期進一步提升我 國自主組裝多平台移動遙測製圖設備能力與研發能量,厚植未來國際 自動化測繪技術競爭力。相關成果除可加速國土規劃外,並藉以培養 優質人才、提升學術水準及國家競爭力。
Abstracts
The efficiency and advantages of spatial information systems rely on the validity and time effectiveness of spatial and attribute information to work properly and
express the phenomena of real world. However,
traditional surveying techniques can’t fit the trend of technology revolution and cost reduction due to their heavy labor works and slow project progress. Generally speaking, survey and geomatics technologies have been revolutionized since the early nineties inthe
last century.Advances in satellite and inertial technology made it possible to think about mobile mapping in a new way. Instead of using ground control points as references for orienting the images in space, the trajectory and orientation of the imager platform can now be determined directly.
Cameras, along with positioning and orientation sensors, are integrated and mounted on a land vehicle for mapping purposes. Objects of interest can be directly measured and mapped from images that have been geo-referenced using positioning and orientation sensors.
The Self-development of mobile mapping technologies applied for various platforms can be considered as the ultimate objective of geomatics communities around the globe. This pilot project collects fruitful references considering multi-platform mobile mapping technologies in term of applications, historical overviews as well as regulations, develops a multi-sensor integrated positioning and orientation system based on a tactical grade FOG IMU with superior performance and less expanse compared to commercial systems with similar specification without ITAR export license control, evaluates the standard calibration and testing procedure and facilities to verify the performance of INS/GNSS integrated systems to guarantee the quality of mapping missions as well as implement novel and novel multi-sensor integration algorithms to enhance the performance mobile mapping systems significantly and develop software platform for spatial information visualization, processing and analysis. In addition, this project conducts plot study concerning the developments of airborne oblique image photogrammetricand portable mobile mapping platforms,
respectively, to enhance Taiwan’s capability of research and development for advanced mobile mapping technologies and to be comparable to regional and international geomatics and navigation communities. The progress of this project is beneficial to the development of national spatial planning program as well provide proper and professional training to young scholars and engineers thus enhance the competitiveness and academic achievement around the world.
目錄 摘要 I
目錄 III 圖目錄 VI 表目錄 XIII
第一章 前言 ... 15
第二章 多平台定位技術資料彙整 ... 10
2.1 多平台定位技術之沿革 ... 15
2.1.1 車載移動遙測製圖技術之回顧 ... 15
2.1.2 空載移動遙測製圖技術之回顧 ... 26
2.1.3 個人攜行移動測繪系統之回顧 ... 31
2.1.4 船載移動遙測製圖技術之回顧 ... 33
2.2 多平台定位技術應用實例之回顧 ... 34
2.3 多平台定位技術發展趨勢... 38
2.3.1 數位影像系統 ... 39
2.3.2 高精度定位定向系統 ... 40
2.4 多平台定位技術之比較與分析 ... 58
2.5 現有多平台定位技術自我檢核機制 ... 65
2.6 國內外多平台定位作業及驗收規範 ... 78
2.7 本章小結 ... 84
第三章 規劃整合慣性導航系統 ... 85
3.1 國內外慣性測量儀規格回顧... 85
3.2 引進戰術等級慣性測量儀並完成與雙頻載波相位 GNSS 接收 儀之機電整合 ... 95
3.3 研發慣性導航系統軟體模擬器 ... 98
3.4 評估自行研製戰術級慣性測量儀之可行性 ... 107
3.5 多元感測器定位定向系統之靜態與動態性能驗證 ...110
3.6 本章小結 ...118
第四章 評估引進及建立國內慣性測量儀之標準率定程序 ... 120
4.1 發展具備陀螺儀之慣性測量儀誤差校正模型 ... 123
4.2 建立慣性測量儀各系統誤差之率定模式 ... 131
4.2.1 率定模式介紹 ... 133
4.2.2 測試及結果 ... 136
4.3 研擬提升慣性測量儀穩定性之技術 ... 143
4.4 研發慣性測量儀率定實驗室與外業率定技術 ... 152
4.5 評估建立定位定向系統性能評估之標準程序 ... 156
4.6 評估建立專業慣性測量儀率定及校正實驗室之可行性 ... 162
4.6.1 評估引進適用於慣性測量儀率定專用之陀螺儀測試旋轉台165 4.6.2 評估引進適用於慣性測量儀率定專用之加速度計測試平台166 4.6.3 評估引進適用於慣性測量儀率定專用之溫度櫃 ... 167
4.7 本章小結 ... 168
第五章 設計新解算模式之定位定向演算法 ... 170
5.1 發展使用地平坐標系之慣性導航方程式軟體 ... 171
5.1.1 坐標系統簡介 ... 172
5.1.2 INS 導航方程式 ... 176
5.1.3 INS/GNSS 整合架構 ... 181
5.1.4 CAINS 軟體使用者介面與效能分析 ... 190
5.2 發展精密單點定位動態軌跡演算法 ... 196
5.3 評估精密單點定位動態軌跡演算法於定位定向技術之應用效 益 ... 208
5.6 分析主要 GNSS 之效能對於定位性能之影響 ... 226
5.7 評估結合 e-GPS 與 VRS 技術應用於多平台定位技術應用之可 行性 ... 231
5.8 本章小結 ... 237
第六章 評估發展多元空載傾斜攝影定位系統技術及其應用 ... 239
6.1 國內外空載傾斜攝影技術之沿革歷程文獻蒐集 ... 239
6.2 空載傾斜攝影技術應用實例相關文獻之蒐集(至少需含 3 個 領域) ... 242
6.3 評估自主空載傾斜影像軟硬體技術 ... 248
6.4 本章小結 ... 261
第七章 建置空間資訊整合展示平台 ... 262
7.1 完成潛在使用單位之訪談(至少包含 5 個領域) ... 262
7.2 完成空載傾斜攝影應用層面之規劃,進而評估未來多平台遙 測資訊整合系統的全面施行效益與實際成本 ... 264
7.3 空載傾斜攝影影像查詢與展示程式相關演算法之研發 ... 269
7.4 空載傾斜攝影影像單機版三維地理資訊應用系統開發工作 273 7.5 空載傾斜攝影影像網際網路展示查詢雛形系統開發工作 .... 280
7.4 本章小結 ... 288
第八章 評估建置個人攜帶式定位系統之可行性 ... 289
8.1 個人攜帶式定位系統之規劃與設計 ... 289
8.2 評估影像模組與定位定向系統機電整合之可行性 ... 289
8.3 建立個人攜帶式定位系統之相機透鏡畸變率定校正方式 .... 290
8.4 建立個人攜帶式定位系統之率定演算法 ... 293
8.5 研擬個人攜帶式定位系統之效能驗證方式 ... 295
8.6 評估建立個人通信定位系統之可行性 ... 297
8.7 本章小結 ... 297
第九章 教育訓練及推廣及論文期刊 ... 299
第十章 結論與建議 ... 304
10.1 結論 ... 304
10.2 建議事項 ... 306
第十一章 成果審查會議委員意見 ... 309
11.1 期中成果審查會議委員意見 ... 309
11.2 期末成果審查會議委員意見 ... 326
參考文獻... 330
圖目錄
圖 1. 1 移動遙測製圖系統之作業流程(a)與組成元件(b) ... 2
圖 1. 2 移動遙測製圖系統可拓展之領域... 3
圖 1. 3 自主的移動遙測製圖技術與其他產業之關連... 4
圖 1. 4 本案之執行主軸... 4
圖 1. 5 分月進度折線圖... 7
圖 2. 1 早期移動式測量及空間資料收集技術之範例... 10
圖 2. 2 衛星訊號遮蔽的效應... 11
圖 2. 3 環架式 INS 與固裝式慣性測量儀之比較 ... 12
圖 2. 4 INS 之誤差行為 ... 12
圖 2. 5 直接定位技術之演進... 13
圖 2. 6 Alberta MHIS... 16
圖 2. 7 Alberta MHIS 之 INS/GPS 整合設計 ... 16
圖 2. 8 GPSVan ... 16
圖 2. 9 VISAT 第一代 ... 17
圖 2. 10 VISAT 第二代 ... 18
圖 2. 11 VISAT 第三代 ... 18
圖 2. 12 Street mapper 車載 MMS ... 18
圖 2. 13 第一代(左)與第二代鷹眼平台(右) ... 19
圖 2. 14 系統直接定位成果與各檢核點坐標差異... 20
圖 2. 15 系統直接定位成果與各檢核點坐標差異直方統計圖... 20
圖 2. 16 Google Street View 介面 ... 22
圖 2. 17 TOPCON 公司開發的移動測圖系統 ... 23
圖 2. 18 Optech 的測量車 Lynx Mobile Mapper ... 24
圖 2. 19 立得空間測量車 LD-2000 RH ... 24
圖 2. 20 卡內基大學 Red Team 團隊自動車感測器整合架構 ... 25
圖 2. 21 自動車:Sandstorm(左)、Stanley (右) 、Hilander(中) ... 25
圖 2. 22 自動車:Boss(左)、Junior(右)、Talos(下圖左) ... 26
圖 2. 23 Google 自走車計畫 ... 26
圖 2. 24 第一部空載直接定位移動遙測製圖技術... 27
圖 2. 25 美國俄亥俄州立大學製圖中心發展之直接定位空載移動測繪系統... 28
圖 2. 26 商用空載移動遙測製圖技術之範例... 28
圖 2. 27 空載移動遙測製圖技術之航測製圖流程比較... 29
圖 2. 28 空載雷射掃描系統之原理... 30
圖 2. 29 空載雷射掃描系統之範例... 30
圖 2. 30 個人攜行移動測繪系統原型... 32
圖 2. 31 個人攜行移動測繪系統操作介面... 32
圖 2. 32 船載光達移動遙測製圖系統架構(上)與作業成果(下) ... 33
圖 2. 33 船載光達移動遙測製圖系統其他範例... 34
圖 2. 34 森林火點直接定位系統... 35
圖 2. 35 武漢大學所發展之車載移動測繪系統... 35
圖 2. 36 Visimind MMS 與作業實例... 36
圖 2. 37 個人攜帶系統與作業實例... 36
圖 2. 38 空載 IFSAR 製圖系統 ... 37
圖 2. 39 Yamaha RMAX Type II G ... 38
圖 2. 40 宅島火山監測成果... 38
圖 2. 41 GPS 星群(2011 年 7 月 25 日) ... 41
圖 2. 42 GLONASS 星群(2011 年 7 月 25 日) ... 42
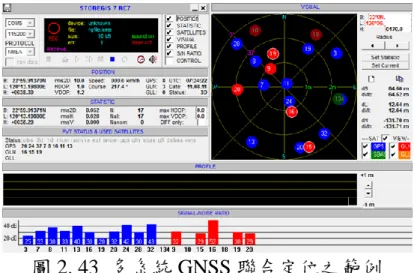
圖 2. 43 多系統 GNSS 聯合定位之範例 ... 43
圖 2. 44 慣性感測系統之分類... 45
圖 2. 45 戰術等級慣性測量儀之範例... 46
圖 2. 46 微機電戰術等級慣性測量儀之範例... 47
圖 2. 47 微機電戰術等級慣性測量儀之範例... 47
圖 2. 48 現有與未來陀螺儀技術之比較... 47
圖 2. 49 高階微機電慣性測量儀之效能... 48
圖 2. 50 擴張卡曼濾波器/平滑器之鬆耦合多元感測器整合架構 ... 52
圖 2. 51 擴張卡曼濾波器/平滑器之緊耦合多元感測器整合架構 ... 52
圖 2. 52 有人機與無人機航測製圖流程之比較... 55
圖 2. 53 空載與車載移動測繪系統聯合資料處理範例一... 56
圖 2. 54 空載與車載移動測繪系統聯合資料處理範例二... 56
圖 2. 55 空載遙測製圖系統... 57
圖 2. 56 車載遙測製圖系統... 58
圖 2. 57 資料處理範例... 58
圖 2. 58 測試軌跡... 59
圖 2. 59 直接定位量測範例... 60
圖 2. 60 (左)低仰角(右)高仰角 GPS 衛星數量 ... 60
圖 2. 61 不同直接定位演算法姿態誤差比較... 61
圖 2. 62 不同直接定位演算法定位誤差比較... 62
圖 2. 63 鬆耦合應用於直接地理定位的定位誤差... 63
圖 2. 64 緊耦合應用於直接地理定位的定位誤差... 64
圖 2. 65 GPS/INS 定位誤差 ... 66
圖 2. 66 時鐘卡概念... 69
圖 2. 67 系統硬體概念圖... 69
圖 2. 68 前向濾波、後向濾波與平滑化誤差累積情況... 72
圖 2. 69 QC 與 ISO 流程比較... 74
圖 2. 70 核幾合關係... 75
圖 3. 1 整合式定位定向技術之關鍵技術... 85
圖 3. 2 導航等級慣性測量儀之性價比... 86
圖 3. 3 雷射陀螺儀範例與原理... 86
圖 3. 4 雷射陀螺儀慣性測量儀與效能範例... 87
圖 3. 5 光纖陀螺儀與慣性測量儀範例... 88
圖 3. 6 各慣性測量儀定位定向效益比較表(無 GNSS 訊號脫落) ... 94
圖 3. 7 各慣性測量儀定位定向效益比較表(10 秒 GNSS 訊號脫落) ... 94
圖 3. 8 各慣性測量儀定位定向效益比較表(60 秒 GNSS 訊號脫落) ... 95 圖 3. 9 (a)利用 GPS 1PPS 訊號實現 IMU/GNSS 觀測量同步 (b)
INS/GNSS/Camera 資料同步之方法 ... 97
圖 3. 10 LCI 慣性測量儀規格與尚未封裝前之照片 ... 97
圖 3. 11 多元感測器定位定向系統之整合架構 ... 98
圖 3. 12 慣性測量儀原始觀測量之擷取與顯示... 98
圖 3. 13 LCI 慣性測量儀所提供之原始觀測量 ... 98
圖 3. 14 整合式定位定向系統模擬器之主要架構... 99
圖 3. 15 整合式定位定向系統模擬器之操作介面... 100
圖 3. 16 多位置測試法率定模型(12 位置) ... 101
圖 3. 17 動態模擬軌跡... 102
圖 3. 18 陀螺儀及加速度計在動態模擬下之觀測量輸出... 102
圖 3. 19 平面位置誤差比較圖... 103
圖 3. 20 靜態模擬陀螺儀之三軸觀測量輸出... 103
圖 3. 21 靜態模擬加速度計之三軸觀測量輸出... 104
圖 3. 22 慣性測量儀 HG-1700 平面位置、速度、姿態誤差圖 ... 105
圖 3. 23 慣性測量儀 iMAR 平面位置、速度、姿態誤差圖 ... 105
圖 3. 24 慣性測量儀 LN-200 及 LCI 平面位置、速度、姿態誤差圖 ... 106
圖 3. 25 導航等級慣性測量儀平面位置、速度、姿態誤差圖... 106
圖 3. 26 路測使用之二套慣性測量儀... 111
圖 3. 27 路測車之內部配置... 111
圖 3. 28 路測車儀器在車頂之配置... 112
圖 3. 29 本次路測軌跡與衛星數量分佈(新竹) ... 112
圖 3. 30 本次路測平面測試與參考軌跡... 113
圖 3. 31 本次路測高度變化與參考高度變化... 113
圖 3. 32 定位誤差序列... 114
圖 3. 33 定向誤差序列... 114
圖 3. 34 本次路測軌跡(北宜) ... 116
圖 3. 35 本次路測平面測試與參考軌跡... 116
圖 3. 36 定位誤差序列... 117
圖 3. 37 定向誤差序列... 117
圖 3. 38 LCI 即時解之效能 ... 118
圖 4. 1 慣性測量儀之內部配置(以光纖陀螺儀為例) ... 120
圖 4. 2 1mg 指北加速度計飄移對慣性導航解之影響(4 小時) ... 122
圖 4. 3 1 度/小時指東陀螺飄移對慣性導航解之影響 ... 122
圖 4. 4 模擬中慣性測量儀之設置... 123
圖 4. 5 慣性測量儀靜態觀測量值理論輸出示意圖... 123
圖 4. 6 慣性測量儀各系統誤差之影響... 124
圖 4. 7 慣性測量儀偏差對觀測量之影響... 125
圖 4. 8 慣性測量儀偏差對觀測量影響之實際範例... 125
圖 4. 9 尺度因子對觀測量之影響... 126
圖 4. 10 軸交誤差... 126
圖 4. 11 軸交誤差對觀測量之影響 ... 127
圖 4. 12 隨機過程之自相關函數... 127
圖 4. 13 一階高斯馬可夫過程之自相關函數... 128
圖 4. 14 一階高斯馬可夫之範例... 129
圖 4. 15 高階雷射陀螺儀雜訊影響之範例... 129
圖 4. 16 高階慣性測量儀加速度計輸出範例(含各式系統誤差) ... 130
圖 4. 17 微機電加速度計輸出範例(含各式系統誤差) ... 130
圖 4. 18 IEEE 1554-2005 號標準文件所建議之測試程序... 133
圖 4. 19 率定模式之架構圖... 134
圖 4. 20 12 位置測試... 135
圖 4. 21 偏差及尺度因子率定原理... 136
圖 4. 22 第 1、2 位置觀測量... 137
圖 4. 23 第 3、4 位置觀測量... 137
圖 4. 24 第 5、6 位置觀測量... 138
圖 4. 25 第 7、8 位置觀測量... 138
圖 4. 26 第 9、10 位置觀測量... 139
圖 4. 27 第 11、12 位置觀測量 ... 139
圖 4. 28 12 位置誤差圖... 140
圖 4. 29 12 位置誤差圖... 143
圖 4. 30 阿倫變方時間區分... 143
圖 4. 31 理想值角速度資料之阿倫分析... 144
圖 4. 32 理想值加速度資料之阿倫分析... 145
圖 4. 33 阿倫變方分析法... 145
圖 4. 34 LCI 加速度計之阿倫變方分析 ... 146
圖 4. 35 LCI 陀螺儀之阿倫變方分析 ... 146
圖 4. 36 閉合式鬆耦合架構... 148
圖 4. 37 開放式鬆耦合架構... 148
圖 4. 38 測試軌跡圖... 149
圖 4. 39 回饋時間間隔為 1 秒之位置誤差變化... 149
圖 4. 40 回饋時間間隔為 1 秒之姿態誤差變化... 150
圖 4. 41 回饋時間間隔為 180 秒之位置誤差變化... 150
圖 4. 42 回饋時間間隔為 180 秒之姿態誤差變化... 151
圖 4. 43 外業多位置法... 152
圖 4. 44 影響定位定向系統性能之因子... 158
圖 4. 45 整合式定位定向系統之測試項目... 159
圖 4. 46 整合式定位定向系統之測試項目... 159
圖 4. 47 GNSS 接收儀定位精度測試項目 ... 160
圖 4. 48 整合式定位向系統精度測試項目... 160
圖 4. 49 慣性測量儀專業動態測試設備... 161
圖 4. 50 慣性測量儀專業溫度測試設備... 162
圖 4. 51 專業慣性測量儀率定及校正實驗室... 163
圖 4. 52 雙頻雙系統之 GNSS 訊號室內播放設備 ... 163
圖 4. 53 雙頻雙系統之 GNSS 訊號室內播放設備 ... 164
圖 4. 54 單軸轉台... 165
圖 4. 55 雙軸轉台... 165
圖 4. 56 三軸轉台... 165
圖 4. 57 單軸線性加速度測試台範例... 167
圖 4. 58 溫度櫃之範例... 167
圖 5. 1 都市地區之 GNSS 訊號遮蔽影響 ... 171
圖 5. 2 慣性坐標系統(i-frame) ... 172
圖 5. 3 地心地固坐標系統... 173
圖 5. 4 當地水平坐標系統... 174
圖 5. 5 載體坐標系統... 174
圖 5. 6 當地水平坐標系統的導航方程式... 181
圖 5. 7 固定區間逆向平滑演算法之概念... 185
圖 5. 8 擴張卡曼濾波器與 RTS 平滑器於 GNSS 訊號脫落時之效益 ... 187
圖 5. 9 商用定位定向軟體所使用的傳統開放式鬆耦合架構... 189
圖 5. 10 CAINS-21 軟體使用之改良閉合式鬆耦合架構 ... 189
圖 5. 11 CAINS-21 軟體介面主視窗 ... 190
圖 5. 12 CAINS-21 使用者操作介面 ... 191
圖 5. 13 KINGSPAD 軟體之操作介面 ... 192
圖 5. 14 測試系統之配置... 192
圖 5. 15 平面參考軌跡... 192
圖 5. 16 高程參考軌跡... 193
圖 5. 17 擴張曼濾波器之定位誤差序列... 193
圖 5. 18 擴張卡曼濾波器及非諧和約制之定位誤差序列... 193
圖 5. 19 擴張卡曼濾波器、非諧和約制及輪速計更新之定位誤差序列... 194
圖 5. 20 擴張曼濾波器之定向誤差序列... 194
圖 5. 21 擴張卡曼濾波器及非諧和約制之定位誤差序列... 195
圖 5. 22 擴張卡曼濾波器、非諧和約制及輪速計更新之定向誤差序列... 195
圖 5. 23 IGS 之觀測網 ... 197
圖 5. 24 精密單點定位處理器主視窗系統畫面... 198
圖 5. 25 精密單點定位處理器主視窗系統畫面... 199
圖 5. 26 地球與月球的示意圖... 202
圖 5. 27 精密單點定位動態軌跡演算法之資料處理流程... 208
圖 5. 28 CAINS-21 與精密單點定位之整合架構 ... 209
圖 5. 29 車載定位定向系統之測試場地... 210
圖 5. 30 DGNSS 軌跡與 KINGSPAD 參考軌跡之比較... 210
圖 5. 31 PPP 軌跡與 KINGSPAD 參考軌跡之比較 ... 211
圖 5. 32 CAINS-21 軌跡(DGNSS)與 KINGSPAD 參考軌跡之比較... 212
圖 5. 33 CAINS-21 軌跡(PPP)與 KINGSPAD 參考軌跡之比較 ... 213
圖 5. 34 DGNSS 與 PPP 之動態軌跡誤差序列 ... 214
圖 5. 35 CAINS-21 於不同整合策略下之定位定向解誤差序列 ... 214
圖 5. 36 類神經網路訓練架構... 219
圖 5. 37 訓練後最終網路結構圖... 221
圖 5. 38 動態類神經網路嵌入式的鬆耦合定位定向演算法架構... 222
圖 5. 39 成大歸仁校區實驗之儀器設置... 223
圖 5. 40 成大歸仁校區實驗軌跡... 223
圖 5. 41 實驗期間 GPS 衛星顆數與 PDOP 值變化 ... 224
圖 5. 42 姿態參數誤差補償... 224
圖 5. 43 位置參數誤差補償... 225
圖 5. 44 本團隊持續開發中的 GNSS 軟體模擬器模擬器 ... 227
圖 5. 45 可視衛星數目,(a) GPS、(b) GLONASS ... 228
圖 5. 46 GNSS 不同基線距離下相對定位誤差比較 ... 231
圖 5. 47 新竹-台北測試軌跡與衛星分佈 ... 235
圖 5. 48 新竹-台北測試軌跡成果 ... 236
圖 5. 49 新竹-台北測試之定位誤差 ... 237
圖 5. 50 新竹-台北測試之定向誤差 ... 237
圖 6. 1 90 年代發展的 9 鏡頭及 8 鏡頭空載攝影系統... 240
圖 6. 2 Z/I Imaging KS-135 相機拍攝結果 ... 240
圖 6. 3 微軟 Bing Map 傾斜攝影應用範例 ... 240
圖 6. 4 Google Map 上傾斜攝影應用範例 ... 241
圖 6. 5 MIDAS 傾斜攝影範例 1 ... 242
圖 6. 6 MIDAS 傾斜攝影範例 2 ... 243
圖 6. 7 英國 Yell 電子地圖網站提供之傾斜攝影服務 ... 244
圖 6. 8 瑞典 Eniro 電子地圖網站提供之傾斜攝影服務 ... 244
圖 6. 9 瑞典 Eniro 電子地圖網站提供之街景影像服務 ... 245
圖 6. 10 瑞典 Eniro 電子地圖網站提供之空載正射及 GIS 圖資影像服務 ... 245
圖 6. 11 澳洲 Nearmap 的電子地圖網站,整合澳洲多時期的空照影像包括 2011 年澳洲大水災後影像,可以立即且清楚地掌握整各災情狀況 ... 246
圖 6. 12 澳洲 Nearmap 的電子地圖網站提供之水災前傾斜攝影影像 ... 246
圖 6. 13 利用空載傾斜攝影進行災前災後變遷分析及災損評估... 247
圖 6. 14 提升行人安全之規劃... 248
圖 6. 15 本團隊設計之五鏡頭攝影系統及相機機架外觀... 249
圖 6. 16 相機同步拍攝檢測之實驗狀況... 250
圖 6. 17 同步拍攝之範例... 251
圖 6. 18 非同步拍攝之範例... 251
圖 6. 19 本團隊於 2010 年 6 月 6 日拍攝之成大校園附近傾斜攝影照片... 252
圖 6. 23 應用軟體系統設計理念... 255
圖 6. 24 淡藍色系使用者人機介面... 256
圖 6. 25 灰黑色系與英文版使用者人機介面... 257
圖 6. 26 匯入內外方位參數... 257
圖 6. 27 內外方位參數編輯... 257
圖 6. 28 自動影像搜尋... 258
圖 6. 29 向量圖層套疊... 258
圖 6. 32 向量圖層 Symbology 設定後 ... 259
圖 6. 33 共軛點量測顯示核線... 259
圖 6. 34 前方交會... 260
圖 6. 35 單像或多像三維數化... 260
圖 6. 36 雙(多)螢幕觀測 ... 261
圖 7. 1 ADS 40 航測系統不同視角拍攝方式... 264
圖 7. 2 連續性空載傾斜攝影成像方式是條帶影像... 264
圖 7. 3 框幅式空載傾斜攝影成像方式是中心投影影像... 265
圖 7. 4 空載傾斜攝影影像進行影像空間與物空間轉換... 265
圖 7. 5 傾斜影像與物空間轉換示意圖... 266
圖 7. 6 資料結構建立階段程式架構圖... 269
圖 7. 7 主要執行階段程式架構圖... 271
圖 7. 8 單機版系統一開始執行的畫面... 274
圖 7. 9 單機版系統中顯示拍攝點位... 275
圖 7. 10 單機版系統的自動套疊影像功能... 275
圖 7. 11 在單機版系統中套疊空載影像與路網圖層 ... 276
圖 7. 12 單機版垂直影像自動偵測功能... 276
圖 7. 13 單機版向左(右)旋轉功能 ... 277
圖 7. 14 單機版前(後/左/右)移動功能 ... 278
圖 7. 15 單機版場景比對,左為套疊空載影像之效果,右為原始底圖... 278
圖 7. 16 單機版 GIS 量測功能:量測面積 ... 279
圖 7. 17 單機版模型建置功能... 279
圖 7. 18 空載傾斜影像網際網路展示查詢雛形系統介面... 281
圖 7. 19 網際網路展示查詢系統一開始執行的畫面... 281
圖 7. 20 網際網路系統自動判斷影像功能並套疊路網圖層... 282
圖 7. 21 網際網路系統垂直影像自動偵測功能... 282
圖 7. 22 網際網路系統向左(右)旋轉功能 ... 283
圖 7. 23 網際網路系統前(後/左/右)移動功能 ... 284
圖 7. 24 網際網路系統之相片查看功能... 284
圖 7. 25 網際網路版場景比對功能,左為套疊空載影像之效果,右為原始底圖 ... 285
圖 7. 26 網際網路系統之 GIS 量測功能:量測面積 ... 285
圖 7. 27 網際網路系統模型建置功能... 286
圖 8. 1 系統整體建置... 290
圖 8. 2 室內相機率定場之圓盤... 290
圖 8. 3 Australis 解算及率定結果 ... 291
圖 8. 4 室內環場影像之相對方位率定場... 291
圖 8. 5 相對方位率定之拍攝與整體解算... 291
圖 8. 6 簡化上三角之運算矩陣... 292
圖 8. 7 坐標系統之統一與轉換關係... 293
圖 8. 8 室外大型率定場(實驗) ... 293
圖 8. 9 系統關係建立... 294
圖 9. 1 新解算模式之定位定向演算法之介紹與實作授課情形... 302
圖 9. 2 空間資訊整合展示平台之介紹與實作授課情形... 303
圖 9. 3 多平台定位技術之歷史回顧與未來發展展望授課情形... 303
圖 9. 4 移動式測繪系統直接定位技術及其應用授課情形... 304
表目錄
表 1. 1 分月進度表... 8
表 2. 1 可搭載之各式感測器... 13
表 2. 2 現有空間資訊擷取技術之優缺點... 14
表 2. 3 系統直接定位能力驗證... 20
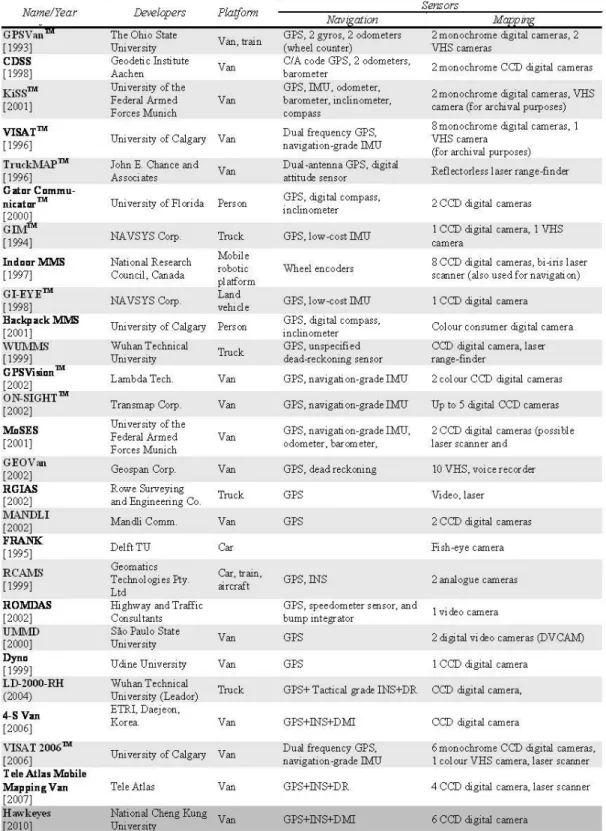
表 2. 4 國際上研究單位所發展的車載遙測製圖平台... 21
表 2. 5 不同定位模式之比較... 29
表 2. 6 未來各衛星系統的比較表... 43
表 2. 7 慣性測量儀之分類規格... 45
表 2. 8 INS/GNSS 整合式定位系統的性能提升策略 ... 51
表 2. 9 各式直接定位遙測平台之效益比較... 53
表 2. 10 多平台移動測繪系統間之互補性... 54
表 2. 11 多平台定位技術之演算法架構比較 ... 59
表 2. 12 定位誤差的比較分析... 63
表 2. 13 DG 的誤差分析比較 ... 64
表 2. 14 誤差來源與大小... 70
表 2. 15 現有影像處理流程之自我成果檢核... 78
表 3. 1 現有遙測製圖系統搭配之商用定位定向系統硬體使用之慣性測量儀(一) ... 90
表 3. 2 現有遙測製圖系統搭配之商用定位定向系統硬體使用之慣性測量儀(二) ... 91
表 3. 3 現有遙測製圖系統搭配之商用定位定向系統軟體... 92
表 3. 4 慣性測量儀之模擬參數設定... 101
表 3. 5 慣性測量儀之平面位置誤差統計表... 106
表 3. 6 慣性測量儀之姿態誤差統計表... 106
表 3. 7 雷射陀螺儀+石英加速度計之戰術等級慣性測量儀方案的 SWOT 分析表 ... 109
表 3. 8 光纖陀螺儀+石英加速度計之戰術等級慣性測量儀方案的 SWOT 分析表 ... 109
表 3. 9 微機電陀螺儀+石英加速度計之戰術等級慣性測量儀方案的 SWOT 分析 表 ... 110
表 3. 10 定位定向誤差統計表... 115
表 3. 11 定位定向誤差統計表 ... 118
表 4. 1 三軸方向示意圖... 135
表 4. 2 模擬之各項誤差真值... 136
表 4. 3 估算系統偏差之率定結果... 140
表 4. 4 估算系統偏差及尺度因子率定之結果... 142
表 4. 5 不同回饋時間間隔之位置誤差比較... 151
表 4. 6 不同回饋時間間隔姿態誤差比較... 151
表 4. 7 定位定向系統規格與作業平台之關係... 158
表 4. 8 整合式定位向系統精度測試範例... 161
表 4. 9 建立專業慣性測量儀率定及校正實驗室之可行性的 SWOT 分析表 ... 164
表 4. 10 可考慮採購之雙軸轉台之規格... 166
表 5. 1 正常重力的常數係數... 177
表 5. 2 GNSS、INS 及 INS/GNSS 整合之特色比較 ... 182
表 5. 3 一般 INS/GNSS 整合架構的簡易比較 ... 188
表 5. 4 定位定向解誤差統計表... 196
表 5. 5 GNSS 衛星天線相位中心偏差 ... 205
表 5. 6 目前精密單點定位技術與 IGS 產品搭配下所能獲得之精度 ... 208
表 5. 7 定位定向誤差之比較表... 215
表 5. 8 TGO 的 SWOT 分析表 ... 216
表 5. 9 GrafNav 的 SWOT 分析表 ... 217
表 5. 10 RTKLIB 的 SWOT 分析表 ... 217
表 5. 11 三種套裝軟體主要差異 ... 217
表 5. 12 詳細實驗狀況標示... 223
表 5. 13 位置、姿態測試結果統計表... 225
表 5. 14 四種星系結合使用之整理,數值為 120 天觀測時段之平均值... 229
表 5. 15 不同 GNSS 處理模式輔助的精密定位定向效益分析 ... 233
表 5. 16 結合 e-GPS 與 VRS 技術應用於多平台定位技術應用的 SWOT 分析表 ... 234
表 5. 17 新竹-台北測試之精度分析表 ... 237
表 6. 1 同步檢測相關參數及檢測成果... 250
表 7. 1 本訪談報告受訪者列表... 262
表 8. 1 相對方位之距離解算的成果... 292
表 8. 2 相對方位之旋轉矩陣與角度平差後之結果... 292
表 8. 3 PMMS 與 MMS 之效能比較驗證表 ... 296
表 9. 1 參與國內外學術會議及提送期刊論文情況... 299
表 9. 2 爭取主辦權之國際研討會... 300
表 9. 3 專利申請資料表... 300
表 9. 4 課程及授課時間表... 301
第一章 前言
現有空間資訊系統(spatial information systems)在空間資訊與地 理資料的採集與管理層次仍然存在很多技術上的問題。其效益建構在 系統空間及屬性資料時效性以及其正確性,並藉此發揮它的功能並表 示真實世界的現象。然而,利用傳統測量技術作為採集空間資訊的方 法並無法全然符合成本考量,傳統測量以及屬性調查作業從開始收集 資料到系統建置完成往往需要半年以上的時間,已不符合科技發展的 趨勢與成本效益。近年來測量與空間資訊技術正在逐漸革新,攝影測 量製圖的技術與精密整合式定位定向系統結合,搭配多種的數位影像 感測器來收集空間資料,逐步實現快速即時移動式測量及空間資料收 集 技 術 。 這 類 整 合 多 元 感 測 器 並 具 備 直 接 定 位 能 力 (Direct Geo-referencing, DG) 及多感測器系統的空間資訊獲取移動平台;移 動遙測製圖系統(Mobile Mapping Systems, MMS),正是國內外空間資 訊領域產官學各界因應此挑戰的最佳利器,值得一提的是這類系統最 早完全由空間資訊領域之學者為了因應空間資訊領域需求主導開 發,並與機電整合與軟體工程相關領域之工程師合作而設計的軟硬體 架構,目前已廣泛應用於非傳統測量之應用領域中,全球移動遙測製 圖系統相關之空間資訊與非空間資訊產業產值(含應用)迄今已成長 至高達每年數十億美元,未來還將持續成長(Schwarz and El-Sheimy, 2008)。
移動遙測製圖系統整合全球導航衛星系統 (Global Navigation Satellite System, GNSS)及慣性導航系統 (Inertial Navigation System, INS)形成高精度直接定位系統,並結合多種高效率影像感測器,搭配 高精度率定場,能快速獲取並儲存感測資料,直接解算並獲得感測器 方位,最後透過高度自動化的軟體系統進行資料處理,獲得所需的空 間資訊,移動遙測製圖系統之作業流程如圖 1.1a 所示。移動平台可 以是衛星、飛機、直昇機、船舶、汽車或人,所搭載的定位定向感測 器可能包括 GNSS 接收儀、INS 及航位推算感測器(Dead Reckoning, DR)感測器等,觀測感測器系統則可以是相機、攝影機、多光譜掃描 儀或雷射掃描儀(laser scanner)等,如圖 1.1b 所示。
如前所述,移動遙測製圖系統之核心為具備多元感測器整合架構 之整合式定位定向系統(Positioning and Orientation System, POS),此 架構包含不須使用外在電波訊號的自主連續相對定位的慣性導航系
資料擷取 GPS, INS 及 影像資料
直接地理定 位 給 定 影 像 姿 態及位置
測量及 GIS 應 用 取 得 重 要 特 徵 之 三 維 空 間 坐 標,儲存於 GIS 資料庫中
統、輪速計(odometer)、與仰賴電波定位之絕對定位技術如全球導航 衛星系統,如此可在資料採集過程中無須使用地面控制點而直接計算 具備高採樣率之感測器方位。同時搭載如高頻高密度距離觀測之雷射 掃描儀,結合多解析、多波段光譜掃描儀及數位相機等多種類的影像 感測器,則可獲取各應用領域的幾何與屬性資訊。配合不斷進步之電 腦運算能力與容量,搭配各類移動平台機動性並考量各種需求,便能 在相應的領域上發揮相應價值,移動遙測製圖系統的應用面也隨之更 深更廣。
(a) (b)
圖 1. 1 移動遙測製圖系統之作業流程(a)與組成元件(b) (El-Sheimy, 1996)
在空間資訊相關應用領域方面,移動遙測製圖系統的機動性以及 對數位影像處理與蒐集的能力,可以顯著地節省許多傳統測量所需要 的人力及時間,其高自動化的地形測繪與影像製圖能力更是符合全自 動科技趨勢的潮流。都市規劃與設計方面,透過雷射掃描及影像處 理,可以建立一個三維的都市模型,做為區域設計與規劃的依據。而 把建立都市模型的相關屬性做進一步的擴充,並與空間資訊系統結 合,便可以建立一個三維數碼城市來模擬各種狀況。其中一個很重要 的應用就是模擬天然災害造成的損害,來建立都市對應天災的預防及 應變措施。
而在其他非傳統測量應用方面,如建立交通標誌資訊以規劃交通 路線,或用來調查都市地區的基礎公共建設,如人孔、變電箱、電線 桿,甚至透過影像處理技術獲取路牌、招牌上所隱含的屬性資訊,更 新導航電子地圖,整合並更進一步加值定位服務技術。在載具結合 上,透過無線通訊技術以發展無人控制載具,搭配直接定位技術滿足 即時監控及救災需求。若更進一步整合人工智慧技術,開發無人自動 駕駛車更能實質擴展到民生用途及軍事技術上,關於移動遙測製圖系
統更廣泛之應用請參考圖 1.2。
目前國內外運作中的商用或研究型的移動遙測製圖平台甚多,在 此無法逐一詳述,但這些商用移動遙測製圖平台之特性包含性能可靠 且精度符合製圖需求、大量生產效率高、價格昂貴、未有標準化規格 與軟硬體之升級彈性有所限制,且升級所費不貲。舉例來說,一套商 用空載遙測製圖系統之售價至少四千萬;相似地,一套商用車載遙測 製圖技術之售價至少三~四千萬,但其軟硬體成本其實往往不到售價 一半。國家或民間業者每年投入大筆資金採購相關軟硬體設備,但此 舉對於國內空間資訊產業技術升級是有限的。圖 1.3 說明發展自主移 動遙測製圖技術對於國內其他產業之影響。除了積極發展不同平台之 移動測繪技術外,未來更須發展多平台移動遙測製圖技術資料整合架 構提供更有效率的空間資訊採集、分析與應用。
圖 1. 2 移動遙測製圖系統可拓展之領域
空間資訊產業
自主國防工業 民用導航技術
相關產業
自動控制技術 相關產業
機器人相關產 業(AGV, UAV,
ROV)
石油產業
圖 1. 3 自主的移動遙測製圖技術與其他產業之關連
圖 1. 4 本案之執行主軸
本工作案在既有成果上進一步提升我國自主研製多平台移動遙 測製圖設備能力與應用軟體研發能量,厚植未來國際自動化測繪技術 競爭力。研發成果除可加速國土規劃外,並藉以培養優質人才、提升 學術水準及國家競爭力,圖 1.4 說明本案完整執行架構。根據工作計 畫書之內容,本案於九個月中完成的工作項目如下:
一、多平台定位技術資料彙整
1. 蒐集國內外多平台定位技術之沿革歷程。
2. 比較國內外現有多平台定位技術之計算方式、演算法差異及 誤差分析。
3. 蒐集多平台定位技術應用實例之相關文獻(至少需含 3 個領 域)。
4. 現有多平台定位技術自我檢核機制。
5. 國外內多平台定位作業及驗收規範。
6. 評估多平台定位技術發展趨勢。
二、規劃整合慣性導航系統
1. 蒐集國內外慣性測量儀規格、成本、效能、穩定性及規範等 相關文件,作為評估引進慣性測量儀及擬定相關規範之參考。
2. 引進可提供含速度變量、角度變量等原始觀測量,並支援輪 速計訊號之戰術級(Tactical)慣性測量儀。
3. 評估自行研製戰術級慣性測量儀之可行性,及評估慣性測量 儀組裝於空載、船載、車載及個人攜帶式等操作模式之可行 性。
4. 研發慣性導航系統軟體模擬器,並完成戰術級慣性測量儀之 動態與靜態定位理論性能模擬分析(含位置、速度與姿態誤 差,模擬器需含原始碼)。
5. 完成戰術級慣性測量儀、雙頻載波相位接收儀及感測器之機 電整合(多元感測器定位定向系統)、並設計觀測量同步演算 法及開發原始資料擷取系統。
6. 完成多元感測器定位定向系統之靜態與動態性能驗證。
三、評估引進及建立國內慣性測量儀之標準率定程序 1. 發展具備陀螺儀之慣性測量儀誤差校正模型。
2. 建立慣性測量儀各系統誤差之率定模式。
3. 研擬提升慣性測量儀穩定性之技術(具備原始碼)。
4. 研發慣性測量儀率定實驗室與外業率定技術。
5. 評估引進適用於慣性測量儀率定專用之陀螺儀測試旋轉台。
6. 評估引進適用於慣性測量儀率定之溫度櫃與加速度計測試平 台。
7. 評估建立定位定向系統性能評估之標準程序。
8. 評估建立專業慣性測量儀率定及校正實驗室之可行性。
四、設計新解算模式之定位定向演算法
1. 發展地平坐標系之慣性導航方程式,並評估其精度。(具備原 始碼)
2. 發展精密單點定位動態軌跡演算法(具備原始碼)。
3. 分析含現代化 GPS、現代化 GLONASS、Galileo 與 Compass 等主要 GNSS 之效能對於定位性能之影響。
4. 評估精密單點定位動態軌跡演算法於定位定向技術之應用。
5. 評估發展多系統 GNSS 載波相位差分定位動態軌跡演算法之 可行性。
6. 評估結合 e-GPS 與 VRS 技術應用於多平台定位技術應用之可 行性。
五、評估發展多元空載傾斜攝影定位系統技術及其應用 1. 蒐集國內外空載傾斜攝影技術之沿革歷程文獻。
2. 蒐集空載傾斜攝影技術應用實例之相關文獻(至少需含 3 個領 域)
3. 評估自行組裝多鏡頭空載傾斜攝影及定位攝影系統之可行性。
4. 開發空載傾斜影像資料搜尋與瀏覽模組(具備原始碼)。 六、建置空間資訊整合展示平台(含單機版及網路版)
1. 至相關單位進行訪談,具體規劃傾斜攝影之應用層面。
2. 研提單機版三維地理資訊應用系統。
3. 設計可對外提供一般民眾使用之空載傾斜攝影影像網際網路展 示查詢系統。
七、評估建置個人攜帶式定位系統之可行性 1. 個人攜帶式定位系統之規劃與設計。
2. 評估影像模組與定位定向系統機電整合之可行性。
3. 建立個人攜帶式定位系統之率定演算法。
4. 設計個人攜帶式定位系統之相機透鏡畸變率定校正方式。
5. 研擬個人攜帶式定位系統之效能驗證方式。
6. 潛在使用者之訪談報告(至少需含 3 個領域)。 7. 評估建立個人通信定位系統之可行性。
八、教育訓練及推廣 九、論文期刊
本團隊執行本案之各項任務時程,遵照本案之工作計畫書預定時 程進行,並於 100 年度 4 月起每個月工作專案月報回報至內政部地政 司,作為每月進度檢核依據。表 1.1 為執行本案之分月進度表,圖 1.5 為分月進度折線圖,統計至 12 月底止,本團隊於各項任務皆超前完 成進度,順利完成工作計畫書所規劃之各項工作。
圖 1. 5 分月進度折線圖
表 1. 1 分月進度表
任務名稱 權重 年度 100 年度
月份 3 4 5 6 7 8 9 10 11 12 多平台定位技術資料彙整 14% 預定 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
實際 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3.0 規劃整合慣性導航系統 14% 預定 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
實際 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3.0 評估引進及建立國內慣性測量 14% 預定 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
儀之標準率定程序 實際 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3.0 設計新解算模式之定位定位定
向定向演算法 14% 預定 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 實際 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3.0 評估發展多元空載傾斜攝影定
位系統技術及其應用 14% 預定 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 實際 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3.0 建置空間資訊整合展示平台訪
談報告 2.5% 預定 0.5 1.0 1.0 實際 0.5 1.0 1.0 單機版三維地理資訊應用雛型
系統 7% 預定 0.2 1.2 1.4 1.4 1.4 1.4 實際 0.2 1.2 1.4 1.4 1.4 1.4 空載傾斜攝影影像網際網路展
示查詢雛型系統 7% 預定 0.0 1.4 1.4 1.4 1.4 1.4 實際 0.0 1.4 1.4 1.4 1.4 1.4 評估建置個人攜帶式定位(及測
圖)系統之可行性 7% 預定 0.0 1.4 1.4 1.4 1.4 1.4 實際 0.0 1.4 1.4 1.4 1.4 1.4
教育訓練及推廣 1% 預定 1.0
實際 0.5
論文期刊 2.5% 預定 1.2 1.3
實際 1.2 1.3
工作計畫書 1% 預定 0.5 0.5 實際 0.5 0.5
期中報告 1% 預定 1.0
實際 1.0
期末報告 1% 預定 1.0
實際 1.0
總進度 100% 預定 3.7 16.7 29.4 41.1 55.0 66.7 74.2 81.7 92.5 100.0 實際 3.7 16.7 29.4 41.1 55.0 66.7 74.2 81.7 99.5
第二章 多平台定位技術資料彙整
測量及空間領域對於移動式測量及空間資料收集技術之需求始 於攝影測量發展初期,如圖 2.1 所示。故移動遙測製圖系統的觀念可 溯及 20 世紀初航空攝影測量之始,以飛機為平台搭載相機,利用地 面控制點及影像重疊共軛點量測反算影像方位,此種定位方式稱為間 接式定位(Indirect Geo-referencing),此為移動遙測製圖系統的原始形 式。而自 1980 年代起隨著衛星定位技術之發展,從早期使用美國 GPS (Global Positioning System) 的 單 一 系 統 , 接 下 來 伴 隨 俄 羅 斯 的 GLONASS (GLObal NAvigation Satellite System)之發展提供早期多系 統衛星定位技術之雛型,故航空攝影測量結合雙系統衛星動態定位技 術,使得求解影像方位的過程僅需少量控制點,如此可大幅節省外業 人事成本與提升作業效率。歐美的空間資訊工程相關研究機構也約略 在此時期陸續提出來整合衛星定位技術及數位相機的車載移動遙測 技術(El-Sheimy, 1996),但在此階段車載移動遙測只侷限於可行性探 討、雛型設計與系統整合及原型系統測試。
圖 2. 1 早期移動式測量及空間資料收集技術之範例
但衛星定位技術在市區、地下道、隧道、森林等地區仍然會受到 訊號遮蔽的效應所影響,一般來說,第一種狀況為使用者接收儀無法 鎖定超過 4 顆衛星,故無法獲得定位解;而第二種狀況為使用者雖鎖 定超過 4 顆衛星,但其觀測量品質不佳,導致定位精度不佳,如圖 2.2 所示。同時在空載系統之應用時亦常因劇烈的姿態變化而導致衛 星失鎖而無法獲得定位解之狀況。
圖 2. 2 衛星訊號遮蔽的效應
早期的慣性導航技術皆是為符合軍事平台之需求所建立的,因此 一直被視為敏感度極高且受相關國家管制的導航系統。早期的 INS 使用機械環架式設計,其精度高但體積龐大,無法應用於移動遙測製 圖中,如圖 2.3 右所示。自 1980 年起,固裝式(strapdown)慣性測量儀 (Inertial Measurements Unit, IMU)之發展因光學陀螺儀與石英加速度 計技術發展普及而逐漸成為主流,這類慣性測量儀具備精度高與體積 小等特性,如圖 2.3 左所示。故吸引歐美空間資訊領域研究學者深入 探討將慣性導航技術引入移動遙測製圖技術之可行性。
慣性導航技術需要初始的位置及姿態供加速度的轉換及積分運 算。載體的初始位置可以透過輔助感測器(如衛星定位技術)給定,但 姿態部分則需要一段10至15分鐘的初始對準(alignment)的程序,初始 的水平姿態可藉由加速度計在完全靜止的模式下的輸出來決定,而初 始的方位角則要透過陀螺儀偵測地球自轉的速度來計算。因為地球自 轉的速度很慢,所以需要較精密的陀螺儀(陀螺儀之飄移要小於10度/
小時)才有辦法偵測。這個相對於載體及導航坐標系的初始姿態矩陣 確定之後,整個INS可切換至自由導航模式。此時的INS不像衛星接 收儀需要接收外來的信號進行導航,裝載有INS的載體可以進行自主 導航(autonomous navigation)(Titterton and Weston, 2004),慣性導航技 術具有高採樣頻率及短時間內高精度之特性,所以可以被使用來解決 衛星定位所遭遇諸如訊號遮蔽、低採樣頻率、週波脫落、易被干擾等 限制。但INS在獨自運作的模式下其定位誤差在五分鐘之內約略與時 間的平方成正比,如圖2.4所示。而整合式定位及定向系統能夠克服 單一系統之缺點且提供更穩定的定位及定向成果,故目前不管在軍用 或民用的整合系統發展皆趨向於使用慣性導航及衛星定位技術。主要 的動機在於此二系統具有互補之特徵,衛星定位技術在無訊號遮蔽的 環境下可以提供穩定的定位及導航資訊,故它可用來減低慣性導航因 為積分加速度計及角速度之系統誤差所造成隨時間累積的定位誤 差,對於高動態運動的物體而言,衛星定位技術無法提供足夠的採樣
頻率來追蹤載體的運動。另外慣性導航技術可以提供衛星定位技術所 無法提供的高採樣率姿態參數。國外相關研究機構曾經嘗試以GNSS 天線陣列的方式來獲取載體的姿態參數,唯受限於基線長度、採樣率 與精度不符合移動遙測製圖應用領域的需求。故約於1995年前後,整 合INS及GNSS的直接定位系統於是實現,並開始應用於飛機及汽車 移動遙測製圖平台,1996年加拿大Applanix公司所發展的POS系列產 品是第一個商用的直接定位系統,圖2.5所示為直接定位技術的發展 流程。
固裝式慣性測量儀 (IMU)
環架式慣性導航 系統(INS) 封裝後直接安裝於
載體 3軸加速度計與3軸
陀螺儀模組
伺服馬達
穩定平台
機械環架 3軸加速度計與3軸
陀螺儀模組
圖 2. 3 環架式 INS 與固裝式慣性測量儀之比較
IMU計算 得之位置
實際位置
誤差位置
失去衛星 訊號之始
失去衛星 訊號之末
圖 2. 4 INS 之誤差行為
如前所述,移動遙測製圖移動平台可以是衛星、飛機、直昇機、
船舶、汽車或人,所搭載的定位定向感測器可能包括 GNSS 接收儀、
INS 及里程計數器等,觀測感測器系統則可以是相機、攝影機、多光 譜掃瞄儀或雷射掃瞄儀等。表 2.1 所示為各式移動遙測製圖相關感測 器與其所提供資料之屬性。配合不斷進步之電腦運算能力與容量,搭 配各類移動平台之機動性並考量各種需求,便能在相應的領域上發揮 相應價值,移動遙測製圖的應用面也隨之更深更廣。
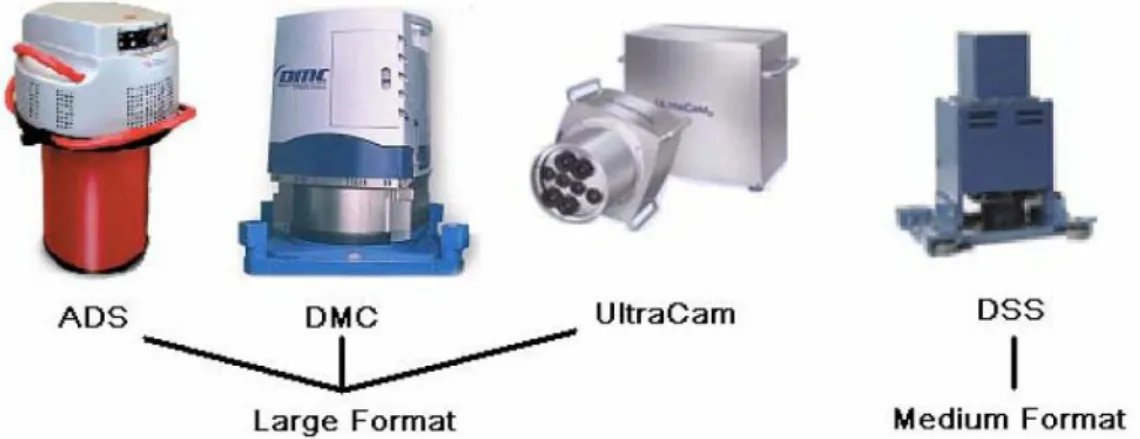
精密整合式定位定向系統與空載多光譜影像感測器(或數位相機) 結合,是目前航空攝影測量領域最先進的移動遙測製圖技術,如 Leica ADS40、Z/I Imaging 及 Vexcel UltraCam 等;精密整合式定位定向系
統與空載雷射掃描儀結合則形成空載光達(Airborne LiDAR),是目前 直接獲得三維空間資訊的先進系統,如 Leica ALS50 及 Optech ALTM;而直接定位系統與近景數位相機、攝影機或雷射掃描儀結合 於汽車平台上,則形成所謂的車載移動遙測製圖系統,是相當有效率 的空間資訊收集利器,如加拿大 Calgary 大學的 VISAT 即為一例。
間接定位 Indirect Georeferencing 只能依賴地面控制點提 供地理定位坐標資訊,
透過空中三角測量抑制 誤差量.
1960-1970
GPS輔助空三 GPS-AT
航空攝影測量中可直 求解定外方位參數之濫 觴。
在空中三角測量中使 用GPS資訊求解投影中 心座標
1980 - 1990
直接地位 Direct Georeferening
最早發展(1990初期) 直接定位技術的研究機 構為美國俄亥俄州立大 學與加拿大卡加立大學
最早(1996年)銷售直接 定位產品(軟硬體)之公司 為加拿大ApplAnix Corp.
1990 - date
圖 2. 5 直接定位技術之演進
表 2.2 比較現有空間資訊擷取技術之優缺點。與現有其他空間資 訊擷取技術相較之下,多平台移動遙測製圖技術並不一定可以提供更 好之定位精度,但仍具備如下之優點(Ellum, 2001):
1. 以遙測技術快速獲取空間與屬性資料。
2. 資料可以重複使用與更新。
3. 作業效率高。
4. 提昇製圖技術自動化之程度。
5. 大幅減少作業成本(泛指施測面積之單價)。
表 2. 1 可搭載之各式感測器(摘自 El-Sheimy, 1996)
感測器種類 資料屬性 資料特性
多光譜線性掃描儀
(推掃式) 影像/幾何 多光譜影像,幾何精度取決與解析度
CCD 相機 影像/幾何 影像,幾何精度取決與解析度
雷射掃描儀 影像/幾何 影像、距離與方位角
雷達 影像/幾何 物體厚度
超音波感測器 幾何 距離
GNSS 定位及定向技
術 幾何 高精度之位置與中精度之姿態訊息(需
多天線陣列)
慣性定位定向技術 幾何 低至高精度位置與姿態訊息(精度取決
於慣性測量儀等級)
輪速計 幾何 距離(精度與行走距離有關)
表 2. 2 現有空間資訊擷取技術之優缺點(摘自 Ellum, 2001)
空間資訊擷取技術 優點 缺點
近景攝影測量
非侵入性的資料蒐 集技術
資料可以重複使用
資料擷取快速
需大量控制點
作業成本高
全測站
高精度 需大量人力
作業成本高
作業時間長
侵入的資料蒐集
不適用大區域高密度的 空間資訊蒐集
GNSS
高精度
作業模式簡易
需大量人力
作業成本高,時間長
侵入式的資料蒐集
不適用 GNSS 訊號遮蔽 區域
傳統航測
非侵入性的資料蒐 集技術
資料可以重複使用
資料擷取快速
需大量控制點
作業成本高
天候限制
多平台移動遙測製 圖技術
無控制點需求
非侵入性的資料蒐 集技術
資料可以重複使用
資料擷取快速
作業時短
作業成本低
硬體成本昂貴
操作模式複雜
2.1 多平台定位技術之沿革
如前所述,移動遙測製圖技術可搭載於飛機上,但其可涵蓋作業 範圍與天氣依賴性之缺點與傳統航測技術相似。與傳統測量技術相較 之下,車載移動遙測製圖技術具備低的侵入性與較佳的空間資訊擷取 效率,同時因為待測目標與影像系統距離遠小於空載系統,故車載系 統可以提供較完整的涵蓋面,同時車載系統可於較差天氣條件下運 作,然而車載系統之缺點為其定位精度隨待測目標與影像系統距離增 加而變差,整合式定位定向系統精度受 GNSS 訊號遮蔽狀況遠較空載 系統嚴重而其作業環境亦受既有路網的限制。個人攜行式的移動遙測 製圖技術的機動性遠較上述二者高,具備更佳的作業彈性,唯因為個 人負重的限制,所以其可攜帶的系統精度自然較上述二者為低。所以 本案之目的除了移動遙測製圖技術核心技術外,更將著重於探討未來 多平台移動遙測製圖技術之作業模式與其成果之聯合處理架構,故本 節首先針對多平台定位技術之沿革歷程擇要提供精簡的回顧。
2.1.1 車載移動遙測製圖技術之回顧
車載移動遙測製圖技術的濫觴可追溯至 1980 年代初期部分加拿 大 的 省 政府 及美國 州 政 府提 出的移 動 式 高速 公路設 施 維 護系 統 (Mobile Highway Inventory System, MHIS)之需求(Lapucha, 1990)。從 1980 年代迄今,目前初估至少 1000 台車載移動遙測製圖系統(含街景 車)正遍布世界各地提供快速的空間資訊擷取方案,其中重要的里程 碑可分為三個階段;第一階段為前 INS 時期,約自 1983 年自 1993 年;第二階段為後 INS 時期,約自 1993 年起至 2000 年;而最後一個 階段為車載光達時期,約自 2000 年起至迄今。為因應不同使用者之 需求,車載移動遙測製圖技術在這 30 年來其定位定向系統與觀測系 統皆有明顯的變化,以下就分這三個時期簡單介紹代表性的系統與參 考文獻。
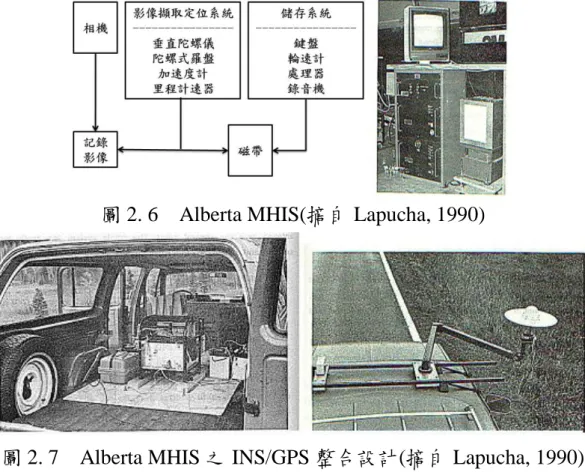
前 INS 時代的第一個代表性系統為加拿大亞伯達省政府與卡加 利大學(University of Calgary)共同發展 Alberta MHIS,請參考圖 2.6。
早 期 的 車載 移動遙 測 製 圖技 術使用 航 位 推算 感測器 , 如 陀螺 儀 (gyroscopes) 、 加 速 度 計 (accelerometers) 及 里 程 計 速 器 (odometer) 等,利用相對定位的原理求取定位解(Schwarz et al., 1993)。此時期所 用的感測器多為類比式相機,所拍攝的照片詳實記錄公路設施的狀 況,提供維修單位近即時的公路資訊。1988 年加拿大 Alberta MHIS
在車載移動遙測製圖技術上,首先應用差分全球定位技術(Differential GPS, DGPS) 來提供相機投影中心的位置參數,隨後並在 1990 年評 估引入 INS 來提供投影中心精確的姿態參數以及適時在 GPS 衛星失 鎖導致無導航解時提供高精度的位置參數(Lapucha, 1990),當時所使 用的 Litton-LN 90-100 INS 與 GPS 接收儀設置圖請參考圖 2.7。而此 時 期 第 二 個 代 表 性 系 統 為 美 國 俄 亥 俄 州 立 大 學 (The Ohio State University)製圖中心(Center for Mapping)研發車載移動遙測製圖系 統,稱為 GPSVan。該系統使用 GPS 及里程計數器提供導航參數,該 系統主要感測器為兩部可動態連續拍攝立體像對的相機,透過近景攝 影測量的原理可獲得特徵物的三維空間坐標,其定位精度界於 0.3m 至 3m 間(Grejner-Brzezinska, 2001),細節請參考圖 2.8。
圖 2. 6 Alberta MHIS(摘自 Lapucha, 1990)
圖 2. 7 Alberta MHIS 之 INS/GPS 整合設計(摘自 Lapucha, 1990)
圖 2. 8 GPSVan (摘自 Grejner-Brzezinska, 2001)
後 INS 時代的代表系統為加拿大卡加利大學所研發的 VISAT 系 列,該校投入車載移動遙測製圖技術的研發已將近 30 年,首先於 1993 年順利將 INS/GPS 系統整合至 Alberta MHIS 中並發展出第一代的遙 測製圖技術架構,稱為 VISAT Van 第一代(Schwarz et al., 1993)。接下 來提出的 VISAT 第二代整合了 INS/GPS、里程計數器、彩色 CCD 相 機、攝影機等完整架構 (El-Shiemy, 1996)。這套系統為全球首度引入 使用雷射陀螺儀(Ring Laser Gyroscope, RLG)之導航等級 INS(陀螺飄 移<0.01 度/小時)之系統,其定位精度為 0.1 至 1 公尺。該系統具備可 調式的攝影間隔與較高的拍攝行車速度(100km/hr)。2003 年該系統亦 獲得加拿大研究學會大筆研究資金,在 VISAT 第二代的基礎上,針 對硬體及相關軟體性能進行升級並打造全新的車輛,稱為 VISAT 第 三代。與 VISAT 第二代相較之下,除電力系統大幅升級之外,控制 電腦體積也大幅縮小,CCD 相機之性能大幅提昇並使用更高等級的 INS/GPS 整合系統,VISAT 系統之細節請參考圖 2.9 至圖 2.11。
後光達時期約自迄今,與前二個階段的遙測製圖技術相較之下,
其主要差異在影像擷取感測器部分新增的車載雷射掃描儀或光達(Li et al., 2001)。圖 2.12 所示為 Street Mapper 公司於 2005 年所發展搭載 雷射掃描儀的車載移動遙測製圖。
圖 2. 9 VISAT 第一代(摘自 Schwarz et al., 1993)
圖 2. 10 VISAT 第二代(摘自 El-Sheimy, 1996)
圖 2. 11 VISAT 第三代(University of Calgary 提供)
圖 2. 12 Street mapper 車載 MMS(Street Mapper 提供)
國內關於車載移動遙測製圖系統相關的完整研發工作始於 2008 年,成功大學於 2008 年起在國科會連續三年資助下開始嘗試自主研 發車載移動遙測製圖技術(含軟硬體),目前成果顯示無控制點直接平 面定位精度為 15 公分(均方根誤差),三維定位精度為 28 公分(均方根 誤差) (Li, 2010)。該系統使用的整合式定位定向系統為使用包含使用