以TOA為基礎應用於衛星及基地台混合定位方法之效能改進研究
44
0
0
全文
(2) 以 TOA 為基礎應用於衛星及基地台混合定位方法之效能改進研究 The Research of Performance Improving on the TOA-based Satellites and Base stations Hybrid Position Method. 研 究 生:李彥勳. Student:Yen-Hsun Li. 指導教授:王朱福. Advisor:Chu-Fu Wang. 國 立 屏 東 教 育 大 學 資 訊 科 學 系 碩 士 論 文. A Thesis Submitted to Department of Computer Science College of Sciences National Pingtung University of Education in partial Fulfillment of the Requirements for the Degree of Master in Computer Science June 2014 Pingtung, Taiwan, Republic of China. 中華民國一百零三年六月.
(3)
(4) 致謝 在屏東教育大學資訊科學系碩士班兩年中,感謝感測實驗室的老師們在我的請求下 同意我進入感測實驗室進行研究。剛進學校對資訊不是很了解的我,在研究及研讀期刊 及論文的過程中遇到了許多困難,但在王朱福老師循序漸進的教學中,得以一一克服, 施釗德老師也會對於我的觀念提出一些疑點,使得我對資訊的認知更為正確。王老師也 將實驗室交付給我管理,讓我能對組織統整更有經驗,除了學識之外,也學到組織管理 的學問。 在此也感謝口試委員丁建文老師及施釗德老師的指導,在提計畫時,施釗德老師及 王朱福老師的意見令我學位論文中的一些疑點能夠改進,讓我在口試中更有信心。丁老 師在口試時提出了寶貴的建議,使得口試論文能更為完善。 經過了兩年,我想最感謝的還是我的家人,能夠讓我不用擔心經濟的情況下安心地 完成碩士學業。感謝我的女朋友陳瑩珍在我研究灰心沮喪的時候提供給我精神鼓勵與支 持。在這邊也感謝我的學長們,邱暘智學長、鄭宗庭學長,在我碩一有問題時,能提出 建議讓我更容易找到問題點將它排除。感謝我的實驗室夥伴,孫慈蓮、洪文儀、洪裕凱, 感謝她們一起幫忙分擔實驗室的事情,以及出現問題時一起研究問題點。感謝學弟妹, 林峻崲、楊振舜、吳安庭、吳珮菱、陳新璋、方嘉俊,也一起分擔了實驗室的雜事,讓 實驗室整潔乾淨。 謹以此文獻獻給幫助過我的人。. 李彥勳 謹誌 中華民國一百零三年七月十四日 i.
(5) 摘要 在本研究中我們提出了改進全球定位系統(GPS)以提升定位精準的方法。由於在某 些缺乏可見衛星的區域中,GPS 定位會變得較為不準確甚至失去功能,此時基地台之定 位即可介入並輔助定位,當然,定位的精準度即會隨之提升,假若在可見衛星不滿最低 定位數量的四顆時,而基地台卻有多台之環境底下,我們提出一稱之為混合定位提升方 法(Hybrid Positioning Improved Method, HPIM)來綜合環境內可供使用之所有基地台組 合以提升定位效能。HPIM 之距離測量係以 TOA(Time of Arrival)的方法為基礎來進行計 算。在效能評估實驗上,我們將 HPIM 與傳統混合定位法 GPSone 做一比較,實驗結果顯 示,我們所提之方法比起 GPSone 在誤差範圍以及定位成功率上皆有不錯的表現。 關鍵詞:GPS 定位、TOA、基地台。. ii.
(6) Abstract In this thesis, a positioning method is proposed to improve the accuracy of the Global Position System(GPS). Due to the lack of visible satellites in some areas, GPS may become more inaccurate, and sometimes even lead to malfunction. Generally, the base stations can participate to increase the positioning accuracy. In some areas, the number of visible satellites is less than four but multiple base stations existed in the area, this thesis propose a method called Hybrid Positioning Improved Method (HPIM) to take this situation into consider to improve the positioning performance. The proposed HPIM adopted the TOA (Time of Arrival) method for distance calculation. The simulation results show that our proposed HPIM method outperformed the GPSone method on the comparison of error range and positioning success rate. Keywords: GPS positioning, TOA, base station.. iii.
(7) 目錄 致謝 ..................................................................................................................................... i 摘要 .................................................................................................................................... ii Abstract..............................................................................................................................iii 圖目錄 ................................................................................................................................ v 表目錄 .............................................................................................................................. vii 第一章 緒論 ...................................................................................................................... 1 第一節 研究背景與動機 .......................................................................................... 1 第二節 研究目的 ...................................................................................................... 2 第三節 論文架構 ...................................................................................................... 3 第二章 文獻探討 .............................................................................................................. 4 第一節 GPS系統介紹 ............................................................................................... 4 第二節 無線基地台定位 .......................................................................................... 7 第三節 衛星與基地台混合定位 ............................................................................ 12 第三章 問題描述 ............................................................................................................ 17 第四章 混合定位提升方法HPIM .................................................................................. 19 第五章 成果與討論 ........................................................................................................ 24 第一節 實驗工具與模擬環境 ................................................................................ 24 第二節 比較參數 .................................................................................................... 24 第三節 模擬結果與分析 ........................................................................................ 25 第六章 結論 .................................................................................................................... 32 參考文獻 .......................................................................................................................... 33. iv.
(8) 圖目錄 圖 1 GPS 衛星分佈示意圖(林傳傑繪圖) ......................................................................... 1 圖 2 GPS 系統架構(摘自北科大 鄭大偉) ............................................................................... 5 圖 3 GPS 定 位 概 念 示 意 圖 ( 林 傳 傑 繪 圖 ) .................................................................... 6 圖 4 偽距計算原理 .................................................................................................................. 6 圖 5 三角定位法原理 .............................................................................................................. 7 圖 6 TDOA 定位原理(摘自山東工商學院網路中心) .............................................................. 8 圖 7 AOA 定位原理 ................................................................................................................. 10 圖 8 AOA 計算方式 ................................................................................................................. 10 圖 9 混合抵達時間/角度定位法 .......................................................................................... 12 圖 10 RTD 計算方式 ............................................................................................................... 13 圖 11 只有三顆可視衛星 ...................................................................................................... 14 圖 12 只有兩顆可視衛星 ...................................................................................................... 14 圖 13 只有一顆可視衛星 ...................................................................................................... 15 圖 14 A-GPS 定位技術(摘自 www.navigadget.com) .............................................................. 16 圖 15 缺乏觀測值情形 .......................................................................................................... 17 圖 16 利用基地台補足缺乏的觀測值 .................................................................................. 18 圖 17 HPIM 定位方法實例說明 ............................................................................................. 20 圖 18 HPIM 定位方法實例說明 ............................................................................................. 21 圖 19 過濾超過此門檻值的誤差組 ...................................................................................... 22 圖 20 過濾後的接收器座標組平均 ...................................................................................... 23 圖 21 在相同基地台數量下改變可見衛星數量之分析比較誤差範圍 .............................. 25 圖 22 在相同基地台數量下改變可見衛星數量之分析比較定位成功率 ........................... 26 圖 23 基地台數量增加對 HPIM 誤差範圍的影響 ................................................................ 26 圖 24 基地台數量增加對 HPIM 定位成功率的影響 ............................................................ 27 圖 25 隨機搭配基地台數量比較誤差範圍 .......................................................................... 28 圖 26 隨機搭配基地台數量比較誤差範圍 .......................................................................... 28 圖 27 設定最大傳輸範圍為 0.5km 的誤差範圍 .................................................................. 29 圖 28 設定最大傳輸範圍為 1.0km 的誤差範圍 .................................................................. 30 v.
(9) 圖 29 設定最大傳輸範圍為 1.5km 的誤差範圍 .................................................................. 30 圖 30 設定最大傳輸範圍為 0.5km 的定位成功率 .............................................................. 30 圖 31 設定最大傳輸範圍為 1.0km 的定位成功率 .............................................................. 31 圖 32 設定最大傳輸範圍為 1.5km 的定位成功率 .............................................................. 31. vi.
(10) 表目錄 表 1 模擬環境 ........................................................................................................................ 30. vii.
(11) 第一章. 第一節. 緒論. 研究背景與動機. 全球定位系統(Global Positioning System,簡稱 GPS),是以衛星定位服務為基 礎並應用於使用者的導航定位服務。GPS 是由美國國防部(U.S.. Department of Defense). 所開發的定位導航系統,原本用於軍事應用上,為防止敵國利用全球定位系統影響到自 身國家安全,故實施了選擇性效應(Selective Availability,簡稱 SA 效應),該效應 於星曆中加入誤差值以及使衛星時鐘頻產生抖動來降低即時單點定位的精準度。在西元 2000 年後,GPS 產業蓬勃發展,加上差分全球定位系統(DGPS)技術的產生以及軍方已可 在特定時地的情況實施 SA 的因素下,美國政府決定中止 SA 技術,此時導航技術慢慢轉 移到民間商業用途以及科學的研究,現今已廣泛運用於日常可見的汽車、飛機、船等交 通工具導航輔助。 GPS 總共使用了二十四個衛星來組成星座(Constellation),其分布在六個軌道上 (如圖 1)[11],每個軌道平均分佈四個衛星,在理想狀況下(亦即在無遮蔽、無建築、無 地形、不受天候情況影響下),全球 98%地區可接收到四至八個衛星的訊號進行定位服務。 在戶外的情形下,傳統的 GPS 定位服務運作通常會非常良好。但在文獻[1]提及,在室 內或衛星訊號無法到達的地方(即多障礙、遮蔽,及城市峽谷地形),效果則會變得較 差,若使用者位於未滿四顆衛星訊號可到達的地方,系統便無法實施定位服務。. 圖 1 GPS 衛星分佈示意圖(林傳傑繪圖) 1.
(12) 文獻[1]中提出了另一定位服務技術,該技術是以手機基地台為主的無線蜂窩定位 系統。目前的無線蜂窩定位技術可分為以下列不同參數計算來求出正確坐標的四種方法: (1)TOA( Time of Arrival ) 到 達 時 間 、 (2)AOA( Angle of Arrival) 到 達 角 度 、 (3)RSSI(Received Signal Strength Indication)訊號強度、(4) TDOA(Time Difference of Arrival)到達時間差。TOA 定位法利用三個以上的基地台與行動裝置之間的訊號傳播 延遲時間來計算距離,進而算出行動裝置的位置,訊號傳播速度若以光速計(2x108m ~ 3x108m/sec),由於非常之快,因此造成了 TOA 對於時間誤差非常敏感,即便是 1 微秒(10-6 秒)的時間誤差,也會有高達 300 公尺的誤差。而 AOA 的優點為基地台與行動裝置之間 無需同步,先由方向性天線收取訊號進而判斷訊號來源,再利用兩個以上的基地台的方 向性天線來算出行動裝置位置,它是利用行動裝置的訊號到基地台的方位角進行位置計 算來達到定位效果,但缺點則為在 NLOS(Non-Line-of-Sight)環境下會有較大的誤差, 且需複雜的天線結構。RSSI 方式為利用行動裝置接收基地台所發出的訊號強度來計算出 距離,進而得知行動裝置的位置,由於訊號強度會因障礙物與距離的因素呈現衰減現象, 此方法需實際測量,也需經驗與收集數據方能算出準確值,但也因電波傳播機制很複雜, 導致此一定位演算法並不精準。最後,TDOA 與 TOA 方法類似,並無太大差異,但 TDOA 則需更多基地台來獲得位置資訊,若要求解 TDOA 的方程式,需以泰勒級數展開後獲得 線性方程式,而此線性化方程式還需代入一組初始猜測值,若該初始猜測值不準確的話, 可能會導致收斂失敗的問題,另外 TDOA 與 TOA 有下列兩項同樣的缺點: (1)網路端需同步:若要求高同步,則需要高級昂貴同步計時器才能獲得測量值。因 訊號傳播速度非常快,若時間同步化太差,則會有大的時間延遲,導致算出的定位結 果不精準。 (2)TOA 與 TDOA 需足夠的定位距離與大範圍環境:若要實施測距及定位,需要一定足 夠的距離與大範圍的環境。室內環境常常因為有距離短、範圍小的特點而造成不精準 的定位結果。. 第二節. 研究目的. 本學位論文主要目的為在缺乏衛星可視數量的城市環境下搭配行動裝置基地台定 位技術,提出一以減少 GPS 定位誤差之定位方法,在此所探討的環境中,有下列兩項特 質: (1)大範圍環境。 2.
(13) (2)可見衛星數量不滿四個的情況。 在考慮上述提過的四種無線蜂窩定位方法優缺點後,我們認為 TOA 方法適合在擁有 第一項特質的城市環境中,因此將 TOA 做為測距與定位的方法。在第二項特質中,文獻 [2]所提之 GPSone 方法是在缺乏衛星的情況下,以基地台與行動裝置間測距所得到的位 置測量值做為補足衛星定位中所缺少的位置測量值,避免計算使用者位置時可能會出現 的問題,我們採用 TOA 定位法以及基地台與衛星混合定位法等兩種方式合作,來解決可 視衛星缺乏區域中觀測值數量缺乏以及精準度不佳的問題,進而提出一混合之定位方法 以降低定位誤差。. 第三節. 論文架構. 本學位論文共分六章節,內容如下: 第一章節為緒論,包含研究背景與動機、研究目的及論文架構;第二章為文獻探討, 將探討 GPS 衛星定位、無線蜂窩定位、基地台與衛星混合定位等相關定位方法之文獻; 第三章為探討如何利用多個基地台來提升精準度;第四章為本學位論文所提出的混合定 位提升方法(Hybrid Positioning Improved Method, HPIM),HPIM 使用 TOA 定位法實施測 距、並利用基地台與衛星混合定位來得出估計座標;第五章為實驗模擬結果;第六章則 為結論。. 3.
(14) 第二章. 文獻探討. 現今衛星定位產業越來越發達,若無干擾因素影響,全球 98%地區皆可被太空中的 24 顆衛星所看見,也就是 GPS 實施定位服務會非常良好。但文獻[3]提及,天氣、遮蔽 物、地型…等干擾因素影響下,有些地區則無法被衛星所看見而造成定位誤差值變大或 甚至無法定位,這時候就需要地面的無線蜂窩網路進行輔助定位。文獻[4]提出以基地台、 衛星互補互輔的技術,這項技術可獲得足夠或更多的位置測量值,讓定位服務達到可實 施的程度。以下將針對衛星定位、基地台定位、混合定位等方法文獻,探討其原理。. 第一節. GPS系統介紹. 一、 GPS系統的組成 GPS衛星星座是由24個衛星所組成,在其中,21顆為主要工作衛星,另外3顆為備用 衛星,此24顆分布於6個軌道中,每個軌道置有4顆衛星,這樣的配置可使得GPS系統在 任何時間、地點,對地面的任一接收器都至少有4顆可視衛星來提供定位服務。GPS衛星 時鐘準確度隨著時代進步越來越高,定位精準度也跟著變高。早期試驗型衛星中安裝一 石英震盪器,定位誤差值為14m,相對頻率穩定度為10-11秒。1974年以後,變成使用銣 原子鐘,定位誤差值為8m,相對頻率穩定度為10-12秒。1977年以後,改採用銫原子鐘, 定位誤差值為2.9m,相對頻率穩定度降為10-13秒。1981年以後,再改採用氫原子鐘,定 位誤差值甚至可降低至1m之內,相對頻率穩定度為10-14秒。 GPS系統一般來說,可分為三個部門(如圖2)[12][13]: 1.. 太空衛星群(Space segment): 太空衛星群便是在太空中所分佈的定位衛星群,它們利用衛星上的時鐘取得時間同. 步,持續發射衛星訊號提供資料以實施定位服務。訊號中包含的資訊有時間資訊、衛星 軌道、系統資訊與電離層延遲修正。. 2.. 地面控制站(Control segment) 控制系統包含一座主控制站(Master monitor station) 、五座監控站(Monitor station) 及三座地面天線(Ground antenna) 。因衛星軌道會受到星體重力、太陽風、輻射塵 等干擾而出現擾動現象,因此地面控制站主要功能為追蹤GPS衛星傳送之訊號,並 4.
(15) 提供修正過的軌道資訊及時間資訊給衛星。主控站位於美國科羅拉多州的空軍基地, 功能為收集並彙整衛星觀測資料、計算衛星時鐘參數與衛星軌道。. 3.. 使用者接收端(User segment) 主要是導航接收器,它可追蹤GPS衛星訊號,接收訊號並解碼,從GPS衛星發射訊號 到接收器之間的傳播時間可算出使用者的三維位置與速度。. 圖 2 GPS 系統架構(摘自北科大 鄭大偉). 二、 GPS定位原理 GPS定位採用多邊定位法,乃利用三維空間中三球面交會於一點來得知衛星與地面 接收器的距離,用此得出的距離並計算出接收器的位置,簡而言之,定位原理為一空間 中測距交會點計算。GPS定位順序概念為(如圖3)[11]:第一顆衛星先創造出一圓體範圍(如 圖3 a),第二顆衛星與第一顆衛星重疊時會將位置範圍縮小為一圓形範圍(如圖3 b),第 三顆衛星訊號會與前兩顆衛星球面重疊,則範圍會縮小至兩個可能點(如圖3 c),因此, 第四顆衛星的功能則可作為修正位置誤差。一旦接收到第四顆衛星訊號後,即可創造出 第四顆球面,並確定前述之其中一可能點,經過接收端的迴歸修正後,修正前三顆球面 5.
(16) 計算出的位置誤差,進而得出一精確的位置座標。. 圖 3 GPS 定 位 概 念 示 意 圖 ( 林 傳 傑 繪 圖 ). 計算距離的方式有載波相位算法或者電碼相位算法等兩種,以下,我們只介紹電碼 相位算法中的偽距(Pseudo-range)計算(如圖 4),所謂的偽距即是衛星定位接收器的過程 中,所得出一衛星與接收器之間的估計距離,並非正確距離,所以稱作偽距。. 圖 4 偽距計算原理. 下列式子為偽距計算方程組[4]: = c‧(t1-△t) = c‧(t2-△t) = c‧(t3-△t) 6.
(17) = c‧(t4-△t) = c‧(tn-△t). (2-1). ρi 為第 1 i n 個衛星到接收器之偽距計算值,(xi , yi , zi)為可視衛星之座標,(x , y , z)為欲求出解的接收器之座標,c 為傳播速度(2x108m ~3x108m/sec),ti 為第 i 個衛星 到接收器之間的傳播時間,Δt 為修正衛星之時鐘差,亦即衛星時鐘與接收器時鐘之間 的差異值。. 第二節 無線基地台定位 一、TOA( Time of Arrival )到達時間定位法 到達時間定位法的原理為,以接收到從行動裝置發送電磁波訊號的基地台為圓心, 將行動裝置到基地台的距離(此一距離可由訊號接收時間估算而得)為圓的半徑畫一圓, 依此方法,將多個基地台為圓心畫圓後,取一交點,即可計算出行動裝置位置(如圖 5)。 以理論而言,二維空間下,只需兩個基地台即可定位,但現實環境較為複雜,通常至少 需要比維度再多一個基地台的數量才能進行定位,依此推論,若在三維環境下定位,至 少需要四個基地台才能定位。. 圖 5 三角定位法原理. 到達時間定位法是計算電磁波從行動裝置到基地台的傳播時間,再將該傳播時間乘 以傳播速度(2x108m ~3x108m/sec),便可得基地台與行動裝置之間的距離。缺點在於到 7.
(18) 達時間定位法會受到環境影響,在近郊與市區環境下會有樹、建築物等礙障物影響而產 生非視距(Non Line of Sight, NLOS)情況,非視距會在行動裝置與基地台之間的傳播訊號途 徑中產生散射、折射作用,對量測的時間會有重大影響,由於到達時間定位法對於時間 的敏感度非常高,連帶著對定位結果也有所重大影響。 以下為到達時間定位法在二維空間下的數學式子: (2-2) Ri 為第 i 個基地台至行動裝置的距離,(xi, yi)為第 i 個基地台的座標,(x, y)為行動裝 置的座標,c 為傳播速度(2x108m ~3x108m/sec),τi 為行動裝置到第 i 個基地台的傳播 時間。 建立聯立方程組並計算,即可得知行動裝置的實際座標(x,y),以下為數學聯立方程組: =. (2-3). =. (2-4). =. (2-5). 二、TDOA(Time Difference of Arrival)到達時間差定位法 到達時間差定位法定位方式類似到達時間定位法,但不同的是,到達時間定位法是 利用確切的傳播時間來計算定位,而到達時間差定位法是利用傳送行動裝置訊號到不同 基地台之間的到達時間差值進行定位計算[5]。到達時間差定位法原理為,以電磁波傳播 到某一基地台的到達時間為基準,再將其他基地台接收到行動裝置電磁波訊號的到達時 間與基準的到達時間得出差異值,再將得出的到達時間差做為定位的參數(如圖 6)[14]。. 圖 6 TDOA 定位原理(摘自山東工商學院網路中心). 參照圖 6,以下為數學聯立方程組(以三個基地台訊號為例): 8.
(19) (2-6) (2-7) (2-8). (xi ,yi,zi)為第 i 個基地台的座標,(x,y,z)為行動裝置的座標,ti 為訊號從行動裝置到第 i 個基地站的到達時間,c 為傳播速度(2x108m ~3x108m/sec),(ti-tj) 就是所謂的到達時 間差。在二維空間下,至少需要三個基地台,在上述式子(2-6)至(2-8)可看見三個基地台 可生成聯立方程組,求出解後,即為行動裝置的位置。. 三、RSSI(Received Signal Strength Indication)訊號強度定位法 文獻[6]介紹,此方法是由接收到的訊號作量測強度,以此訊號強度與已知的頻道衰 退模型來得出基地台與使用者之間的距離,再以類似 TOA 方式獲得接收器位置。其定 位細節為,訊號強度定位法會先利用一數學模型依照距離的長短而製作不同的通道模組, 該模組會表示出訊號在通道內衰退的程度,若量測出定位訊號強度與模組中某一個準位 相符合,便可利用該準位代表的距離得知出基地台與使用者之間的距離,接著以基地台 為圓心、用該距離當半徑畫出一圓,其他基地台以同樣方式形成的圓,與其圓得出一交 點(至少需三個基地台),這便是使用者的位置。 訊號強度定位法的最大優點為易於實現。當行動裝置的狀態位於通話中或閒置時, 行動裝置會自動偵測附近訊號較強的基地台做連結或換手(Hand off)動作,那麼便可使 用被挑選出的基地台的訊號求出該基地台與行動裝置間的距離來實施定位。缺點在於(1) 需要事先收集數據資料,再建構該環境的傳播衰退模型,才能讓訊號配對模型中的準位 來得知基地台與行動裝置間的距離;(2) 訊號強度定位法誤差來自遮蔽效應(Shadowing) 與多路徑衰減效應(Multipath Fading),此兩種干擾效應會造成接收訊號強度與傳播結果 有極大的誤差,連帶著所預估的距離也會有誤差。這樣便會有一種情況,預估位置並不 會是相交的一點,而是預估位置會變成在某一區域內。 四、AOA( Angle of Arrival)到達角度定位法 到達角度定位法[7]是利用方向性天線(Directional antenna)及天線陣列(Antenna array)來得知行動裝置訊號到基地台的傳送方向。理論來說,此一方法只需兩個基地台 就可以計算出行動裝置的位置,將兩個基地台傳送的訊號方向畫出方向線,得出交點, 該交點即為行動裝置位置(如圖 7),實際情況下,為求更加精準,會使用更多基地台來 9.
(20) 做定位以修正誤差。. 圖 7 AOA 定位原理. 我們利用兩基地台在二維地圖上做定位(如圖 8),(x,y)為行動裝置的座標,(x1,y1) 為第一個基地台的座標,(x2,y2)為第二個基地台的座標,r1 為行動裝置到第一個基地台 的距離,r2為行動裝置到第二個基地台的距離,θ1 及θ2 分別為第一及第二個基地台訊 號到達行動裝置的角度。. 圖 8 AOA 計算方式. 以下為 AOA 計算數學式子:. 10.
(21) (2-9). (2-10). (x1,y1)、(x2,y2) 、θ1、θ2 均是已知數值,經過式子(2-9)及(2-10) 解聯立後,即 可得知(x,y)座標。 到達角度定位法的缺點有下列幾項:(1)若使用到達角度定位法,在硬體方面會有 額外的負擔,由於會使用到方向性天線及天線陣列,對現有的通訊系統是較不接受的, 基地台設備需做進一步更新;(2)環境因素對於到達角度定位法有著很大的影響力,在 行動裝置附近存在著散射物體,會導致行動裝置與基地台間無法直視,使得行動裝置傳 送至基地台的訊號經過散射物體而讓訊號方向因散射效應而有所誤差;若基地台附近存 在著散射物體,這個環境產生的誤差會比行動裝置附近存在著散射物體的誤差還要來的 大;(3)接著上述所說的散射問題,在一般城市環境,行動裝置與各基地台位置相近, 訊號常常會因散射問題使得各種方向都有訊號,這麼一來,來源便無從判斷、無法實施 定位,行動裝置與基地台間的遠近對於到達角度定位法的定位精準度也是一大問題。. 五、HTAP(Hybrid TOA/AOA Positioning) 混合抵達時間/角度定位法 混合抵達角度/時間定位法[8]為結合了抵達時間定位法及到達角度定位法來進行 定位的方法。其優點為,因為混合了抵達時間定位法及到達角度定位法使得定位的參數 比單一的定位法多了很多,能夠擁有更準確的定位估計值,而且最低需求基地台數量只 需一個即可(如圖 9)。. 11.
(22) 圖 9 混合抵達時間/角度定位法 參照圖 9,數學式子如下: (x,y)=(Rcosθ+x1 , Rsinθ+y1). (2-11). (x,y)為行動裝置的座標,(x1,y1)為基地台的座標,R 為估計距離,R 為上述所說 的 TOA 方法中計算基地台與行動裝置之間距離的方式,即為傳播速度乘以傳播時間;θ 為 AOA 所測量的角度。 HTAP 的缺點在於,因同時使用了 TOA 與 AOA 的方法,在計算上會較為複雜且花時間。. 第三節. 衛星與基地台混合定位. 4-3-1 GPSone GPSone 為高通公司所開發的混合定位方案,基本運作原理是由 CDMA 地面網路定位 及 GPS 定位兩定位技術互補覆蓋率來增加定位精準度以及定位範圍的技術。地面定位技 術計算有上行連結及下行連結,上行連結為行動裝置傳送給基地台的導頻訊號相位,下 行連結為基地站傳送給行動裝置的訊號到達時間。CDMA 地面定位通常採用 AOA( Angle of Arrival)、TOA( Time of Arrival )、TDOA(Time Difference of Arrival)三種技術。 能夠使行動裝置被實施定位服務,有以下四項要求:(1)要有 TOA 測量值;(2)至少需要 三個來源點才能做三角測量,並獲得三個來源點的 TOA 測量值;(3)訊號強度高;(4)無 障礙物阻擋(即是可直視環境)。. 12.
(23) 一、衛星定位 文獻[9]表示,GPSone 的衛星定位公式如同一般衛星定位公式(式子 2-12) = c‧(ti-△t). (2-12). ρi 為第 i 個衛星到接收器之偽距計算值,(xi , yi , zi)為可視衛星之座標,(x , y , z)為 欲求出解的接收器之座標,c 為傳播速度(2x108m ~3x108m/sec),ti 為第 i 個衛星到接 收器之間的傳播時間,Δt 為修正衛星之時鐘差,亦即衛星時鐘與接收器時鐘之間的差 異值。. 二、RTD(Round Trip Delay)往返延遲時間 CDMA 系統中,基地台的上行連結導頻訊號時間是與 GPS 衛星時鐘同步的。行動裝置 上的參考時間是由行動裝置上的天線所檢測並進行調整過的時間,而這個參考時間是用 來計算下行連結傳送訊號的時間。若上下行連結傳輸特性一樣,行動裝置傳送訊號給基 地台的時間為τ,則此訊號從行動裝置到基地台再從基地台回到行動裝置的時間為 2τ, 我們可以得知,基地站到移動台的真實距離乘以二的話,就是該訊號往返時間所算出的 距離(如圖 10)[2]。. 圖 10 RTD 計算方式. 三、只有三顆可視衛星的情況 上述已有解說,在行動裝置從基地站獲得 CDMA 訊號,得知了基地站的時鐘並生成 13.
(24) 行動裝置的參考時間。以圖 11 為例[2],行動裝置的參考時間與基地台時鐘之間的差值 為行動裝置與基地台之間的傳輸時間τ,而此傳輸時間τ=RTD/2,這項估計值可用來修 正參考時間與 GPS 時鐘的時鐘差,將修正過的時鐘來計算 GPS 偽距,以此方式,便可只 使用三顆衛星就可實施定位。. 圖 11 只有三顆可視衛星. 四、只有兩顆可視衛星的情況 在此一情形需採用兩個地面基地台來補足衛星之缺失,另外使用 RTD 修正時鐘差, 也可用來測量基地台與行動裝置的距離,R=cτ,c 為傳播速度(2x108m ~3x108m/sec), 圖 12 所示。. 圖 12 只有兩顆可視衛星 14.
(25) 五、只有一顆可視衛星的情況 此情況下需要從地面蜂窩網路中拿取三個輔助的測量值,此輔助的測量值可以是第 二個基地台的 RTD 或是上行連結的導頻相位差(如圖 13)[2],為了減少多路徑干擾因素, 基地站會取最快到達的導頻訊號為參考導頻。. 圖 13 只有一顆可視衛星. 本學位論文會針對在第三章描述目前定位所遇到之問題,並修改文獻探討中的方法, 進行定位誤差值的改善。. 4-3-2 A-GPS (Assisted GPS) 一、定位原理 AGPS 系統為一行動定位技術。做為定位端的手機必須裝備 GPS 接收器,若手機位 於某一基地台的定位細胞範圍內,手機可偵測到基地台訊號,而 A-GPS 伺服器與基地台 相連,由於基地台位置是固定且已知的,便可得知基地台的準確座標,因此可利用此基 地台進行定位,加上偵測到天上衛星的 GPS 訊號令觀測值增加(如圖 14),便可達到提升 精準度的效果。. 15.
(26) 圖 14 A-GPS 定位技術(摘自 www.navigadget.com). 二、行動定位系統 除了 GPS 可以提供定位服務外,手機在基地台的定位細胞範圍內也可以進行定位服 務,以下為常用的行動定位技術: AOA(Angle of Arrival):利用方向性天線(Directional antenna)及天線陣列(Antenna array)來得知行動裝置訊號到基地台的傳送方向來判斷手機的位置。 CI/CSI(Cell-ID/Cell-Sector Identification):利用行動裝置所處的基地台細胞位置 與行動裝置細胞識別碼來進行定位,精準度會隨著周遭行動裝置連線基地台的數量而有 所改變。 TOA/TDOA(Time of Arrival/Time Difference of Arrival):利用三個以上的基地台與 手機之間的訊號傳播延遲時間來計算彼此的距離,以此距離來判斷手機的位置。 EOTD(Enhanced Observed Time Difference):採用三角定位,綜合了 CSI 與 TOA 技術 來提供定位服務。. 16.
(27) 第三章. 問題描述. 本學位論文提出了改進部分地區無法實施傳統 GPS 定位及無線蜂窩定位,或會讓定 位不精準的問題,因此,論文以混合 GPS 衛星及基地台兩者一起實施定位,使可定位範 圍更廣闊與精準。在文獻[10]中顯示,混合衛星與基地台定位可以使定位服務範圍更加 擴大,因此,本學位論文亦將採用 GPS 衛星與基地台混合定位,並提出降低文獻[3]提出 之混合定位誤差值。 文獻[10]指出,傳統 GPS 定位與基地台定位所遇到的主要問題便是在部分地區無法 實施定位,在這些地區會因建築物、遮蔽物等障礙影響 GPS 衛星直視性,造成可視衛星 數量不足四顆(如圖 15),以及該地區附近的基地台數量不足三個的情況也會發生無法定 位的情況,這種情況將會造成觀測值不夠,使得定位不精準或無法定位。假設我們位在 可視衛星不足四顆且基地台未滿三個基地台的環境下開啟了行動裝置的定位服務後發 現無法進行定位或誤差值很大(人在大馬路上,卻被定位在建築物內),一混合 GPS 衛星 與基地台混合定位的方法,可讓基地台可接收到行動裝置的訊號,提供此位置資訊以補 足 GPS 衛星在實施定位時計算位置有不足觀測值的情形(如圖 16),這樣可以使得可實施 定位服務的範圍更廣大,或是比只有兩個基地台計算位置的結果更加精準。. 圖 15 缺乏觀測值情形. 17.
(28) 圖 16 利用基地台補足缺乏的觀測值. 在文獻[2]中,GPSone 為一 GPS 衛星及基地台混合定位的方法。文獻[9]提出 GPSone 優點為,(1)GPSone 用精確的三維定位,因此比起其他基地台與精準度較高。(2)GPSONE 系統將 CDMA 網路技術及 GPS 定位技術兩者訊息資源結合起來,可由衛星和基地站做出 定位。 現今的科技由於不斷進步,基地台的數量比以往多上許多,因此我們利用多個基地 台來提出一基地台與衛星混合定位方法,藉此改善定位誤差。在本學位論文將提出一定 位機制利用多個基地台(假定環境中存在基地台數量遠比所需之最低輔助門檻值高時)以 GPS 衛星及基地台混合定位配合 TOA 定位法達到降低誤差及提升定位成功率的成效。. 18.
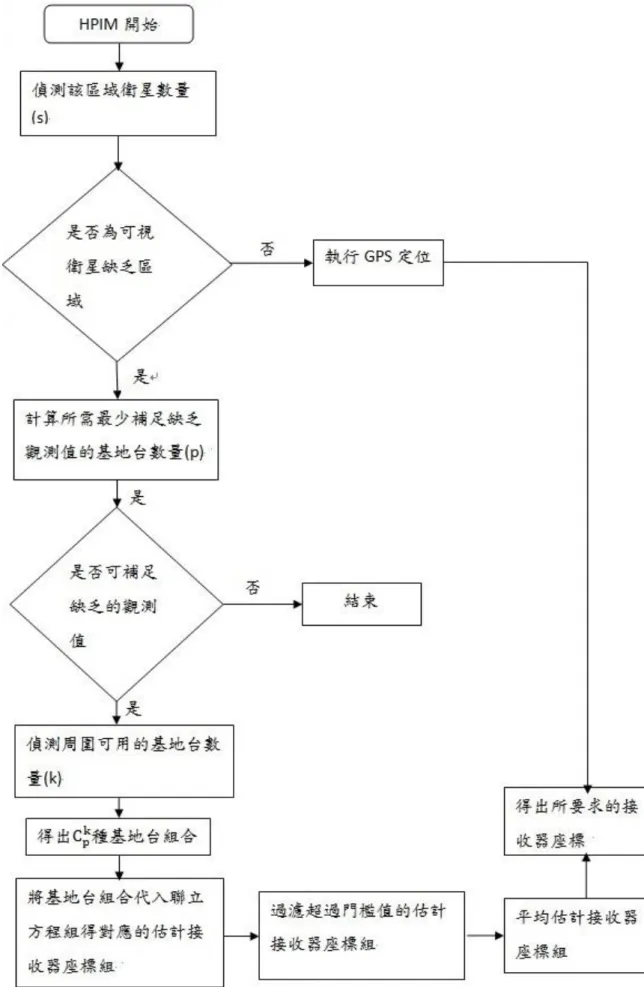
(29) 第四章. 混合定位提升方法HPIM. 目前戶外定位服務主要為 GPS 系統,但該系統的缺點在於,若有遮蔽物則會降低 定位精準度,甚至無法實施定位服務,此無法實施定位的地區為衛星缺乏地區(亦即, 可視衛星數量少於四顆) 。基地台(或 AP)在現今發達的科技下已普遍散佈於我們的周 遭環境,且基地台(或 AP)的數量遠比 GPSone 方法所需的最低補充數量還要多上許多, 因此基地台(或 AP)數量的增加提供了我們可以使 GPSone 方法精確度更好的機會。本 論文提出一稱為 HPIM(Hybrid Positioning Improved Method)的定位方法,以基地台做為 補足衛星缺乏地區所缺失的衛星觀測值,並探討當基地台數量超出於最低彌補缺失數量 衛星時的定位提升方法。HPIM 方法描述如下: 衛星缺乏地區的定義為,該區域未滿四個可視衛星。HPIM 將衛星缺乏地區中可偵測 到的所有基地台位置資料皆納入參考作為觀測值。HPIM 會先偵測某地區的衛星數量(s) 為多少,我們假設該地區為衛星缺乏地區,HPIM 先尋找該區域可偵測到的基地台數量(k) 是否能補足衛星缺乏的數量(p),若不能補足缺乏的觀測值;亦即,k<p,則判定不可 實施 HPIM。反之,若能補足缺乏的觀測值,則可實施 HPIM。在定位的同時,HPIM 會知 道該地區 HPIM 需先算出所需之最低彌補數量(p),所需之彌補數量(p)為 p = 4 - s,若 p. 0,則直接實施 GPS 定位。由於基地台之數量(k)大於所需之彌補數量(p);因此,. 我們可以在 k 個基地台中任意挑選出 p 個,即可組合算出一組接收器的估計位置;亦即, 可獲得. 種組合,而每一種組合即可獲得一筆估計接收器位置。其次,將. 計接收器位置座標平均,另外,將此平均座標扣除. 種組合的估. 種組合的每項接收器位置座標,得. 種組合的估計接收器座標誤差。將估計接收器座標誤差中,擁有過於離譜誤差值的誤 差組中對應到的估計接收器座標去除(我們利用一給定之估計誤差位置座標門檻值作為 基準,當超過此門檻值之組別即拋棄不用)。最後再將過濾後的剩餘估計座標求其平均, 這個平均值即為我們所求的估計座標。 圖 16 為 HPIM 運作的流程圖:. 19.
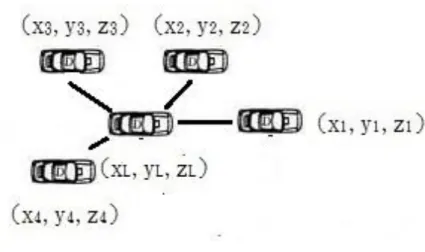
(30) 圖 17 HPIM 定位方法實例說明 20.
(31) 以下將以圖 17 之實例,來作一說明,如圖 18 所示,接收器所在之區域僅存在兩顆 可視衛星(s=2),因此 p=4-2=2,代表至少需 2 個基地台才能補足,此時,可供替代之基 地台則有五個,因此可生成 (. 種組合,也就是 10 種組合。假定(x,y,z)為接收器之座標;. ),1 i 2 為衛星之座標位置;(. ),1 j 5 則為基地台之座標位置。. 圖 18 HPIM 定位方法實例說明 由於此一環境為只有兩個可視衛星的區域,因此,我們只須任意從五個基地台中選 取兩個基地台做為應補足的觀測值即可,並產生如下之聯立方程組:. (4-1) 其中ρi,1 i 2 為衛星 i 到接收器之偽距計算值。ti,1 i 2 為衛星 i 到接收器之時 間延遲,而 tp 則為基地台 p 到接受器間之時間延遲,tg 則為基地台 g 到接受器間之時間 延遲。另外,為了簡化求解,我們假定時間差皆為△t。整個聯立方程組之求解變數則 為 x,y,z 以及△t 等四個變數。我們將 10 組聯立方程組解聯立後,會得出 10 組估計座 標,接著將估計座標做平均,平均後得出平均估計座標。 平均估計座標定義為:. 21.
(32) ( (. ),1 a 10 為式子(4-1)中 10 組聯立方程式得出的 10 組估計座標。 )為 10 組聯立方程式解的平均估計座標。. 接著的步驟則開始過濾過於離譜之座標。我們的檢測方式為測量值( (. )之間的距離(. ),若兩者之間的距離(. )與. )大於所給定之誤差門檻值(例如:1. 公里),則做刪除。 以下是 (. )計算:. 、 、 、 、 、 、 、 、 、 若. >1km,將該組的座標(. )刪除過濾(如圖 19)。接著將過濾後的數組接收. 器座標求平均後,便可得出最後所要求的一估計接收器座標(. 圖 19 過濾超過此門檻值的誤差組. 22. )(如圖 20)。.
(33) 圖 20 過濾後的接收器座標組平均 接下來在第五章中,實驗模擬結果的部分,我們將用我們所提出的 HPIM 與第二章 文獻探討中所提到同樣為基地台與衛星混合定位方式的 GPSone 做一比較。. 23.
(34) 第五章 成果與討論. 本小節主要描述針對所提方法 HPIM 以及 GPSone 所進行之效能評估結果,實驗之 效能參數包含誤差範圍以及定位成功率兩者。以下首先將介紹實驗模擬環境設定,其次 將說明比較參數之定義,實驗結果將置於最後一小節討論。. 第一節. 實驗工具與模擬環境. 模擬情境程式是以 Matlab 撰寫而成來計算評量參數。地圖大小為 10x10x0.02km3。 在此假設接收器與基地台間的最大傳輸範圍:x 軸與 y 軸各為 1km,代表高度的 z 軸設 為 0.02km,而接收器最多可同時連結的基地台數量則設定為五個(如模擬環境設定 表 1)。 表 1. 模擬環境設定. 地圖大小. 10x10x0.02km3. X 軸的最大傳輸距離. 1km. y 軸的最大傳輸距離. 1km. z 軸的最大傳輸距離. 0.02km. 最多可同時連結的基地台. 5. 數量 實驗模擬次數. 第二節. 100 次. 比較參數. 本論文以誤差範圍(e)以及定位成功率(p)等兩項效能參數與 GPSone 進行比較。 誤差範圍(e)定義如下:將接收器估算出之座標(xt,yt,zt)與真實座標(xreal,yreal,zreal) 之歐幾里德差距,便可得該組之誤差值。最後在 GPSone 與 HPIM 方法中的每種情況各模 擬 m 次以獲得 m 個誤差值,再扣除超過門檻設定值 1km 的誤差值(假定有 n 個),剩餘者 再求取其平均,此即為誤差範圍 e,亦即,. 24. ,其中.
(35) 且 et 1km。定位成功率(p)則定為 m 次模擬實驗中,誤差小於 1km 內的個數比例;亦即, p=(m-n)/m。. 第三節. 模擬結果與分析. 4-3-1 在相同可見衛星數量、基地台數量的環境進行結果分析比較 在圖 21,橫軸為可見衛星數量,縱軸為誤差範圍,誤差範圍的單位為公尺。橫軸以 減少可見衛星數量來分析 GPSone 與 HPIM 之誤差範圍效能比較,在圖 21 中,HPIM 與 GPSone 皆在各個可見衛星區域內搭配最低需求的基地台數量(例如:GPSone 在兩顆可 見衛星區域內,必須用兩顆基地台補足,而 HPIM 也使用兩顆衛星搭配兩個基地台) 。我 們可以看到,在三顆可見衛星區域時,誤差是幾乎一致的,只差了 2 公尺。到了兩顆可 見衛星區域時,HPIM 誤差範圍會上升顯著,在文獻[4]的結果圖中也可以見得 GPSone 有此現象。兩、三顆可見衛星區域下,誤差範圍差距大約在 15m 左右。整張圖呈現了 同樣衛星數量、同樣基地台數量的搭配下,HPIM 所呈現的誤差範圍較低,顯示了 HPIM 的演算法可改善誤差範圍的效能。圖 22 顯示出,HPIM 的定位成功率在三顆可見衛星區 域比 GPSone 還要稍低百分之二,但在兩顆及一顆可見衛星區域下相比,HPIM 則稍高於 GPSone 方法。. 140 120. GPSone. m. HPIM. (. 誤 100 差 80 範 圍 60. ). 40 20 0 3. 2. 1. 可見衛星數量. 圖 21 在相同基地台數量下改變可見衛星數量之分析比較誤差範圍. 25.
(36) (. 定 位 成 功 率 %. ). 100 90 80 70 60 50 40 30 20 10 0. GPSone HPIM. 3. 2. 1. 可見衛星數量. 圖 22 在相同基地台數量下改變可見衛星數量之分析比較定位成功率. 4-3-2. HPIM 在不同基地台數量的情況下進行結果分析比較. 圖 23 為分析 HPIM 在同樣可見衛星數量來變化基地台數量,是否可讓誤差範圍更低、 有更好的定位精準度。縱軸為誤差範圍、橫軸為可見衛星數量。我們可以看到,增加基 地台確實可以幫助定位精準度增加。圖 24 顯示了基地台的增加,確實讓定位成功率變 得更好,尤其在一顆可見衛星區域時,原本三個基地台的定位成功率只有 84%,在擁有 四個基地台時,定位成功率提高到了 97%。圖 24 也發現了一點,加入第四個基地台後, 定位成功率就不再增加。 120 100 誤 差 範 圍. 80. m. 40. 三顆可見衛星. 60. (. 兩顆可見衛星. ). 一顆可見衛星. 20 0 1. 2. 3. 4. 5. 可偵測到的基地台數量. 圖 23 基地台數量增加對 HPIM 誤差範圍的影響. 26.
(37) 100 95 90 三顆可見衛星. 85. 兩顆可見衛星. (. 定 位 成 功 率 %. ). 一顆可見衛星. 80 75 1. 2. 3. 4. 5. 可偵測到的基地台數量. 圖 24 基地台數量增加對 HPIM 定位成功率的影響. 4-3-3 在相同可見衛星數量、不同基地台數量環境下進行結果分析比較 在圖 25、圖 26 的結果中,橫軸為可見衛星數量,縱軸為誤差範圍。GPSone 方法依 然為可見衛星與基地台的觀測值數量加起來剛好為四(目前所提及的 GPSone 文章中, GPSone 所需的觀測值加起來皆剛好是四) ,而 HPIM 將每個可見衛星區域中隨機挑出可搭 配的基地台數量執行 100 次 (例如 HPIM 在一顆可見衛星區域中,隨機搭配三、四、五 個基地台;若在兩顆可見衛星區域中,則隨機搭配二、三、四個基地台數量,共執行 100 次) 後平均得出的誤差範圍與定位成功率。我們不看 HPIM 在單單一種搭配下的成果而 是分析各種基地台數量搭配後平均誤差範圍與定位成功率,這樣可更接近現實情況。這 樣便可得知,HPIM 與 GPSone 在同樣可見衛星數量的環境下,分析 HPIM 能否利用更多基 地台有更精準的定位。圖 25、圖 26 的結果表示,HPIM 在貼近現實的情況下,可利用更 多基地台計算位置並平均其座標組,能夠擁有更低的誤差範圍;以及利用過濾離譜座標 的方式也能提高定位成功率。. 27.
(38) 140 120 100. (. 誤 差 範 圍. 80 GPSone. 60. HPIM. m ). 40 20 0 3. 2. 1. 可見衛星數量 圖 25 隨機搭配基地台數量比較誤差範圍. 定 位 成 功 率 ( % ). 100 90 80 70 60 50 40 30 20 10 0. GPSone HPIM. 3. 2. 1. 可見衛星數量. 圖 26 隨機搭配基地台數量比較誤差範圍. 4-3-4 以不同傳輸範圍、相同可見衛星數量、相同基地台數量的環境下進行 分析比較 圖 27 至圖 29 中,基地台與接收器之間的最大傳輸範圍分別設定為 0.5km、1.0km 以及 1.5km。在文獻[15]提及 TOA 因訊號傳輸速度非常快,故距離越短,得到的時間差 會越小、定位越精準,因此我們便分析傳輸距離的變化,是否對 GPSone 與 HPIM 的性能 比較有所影響。圖 27 至圖 29,我們可知道,最大傳輸範圍可影響誤差範圍,在圖 27 28.
(39) 表現出,最大傳輸範圍設定在 0.5km 時,HPIM 的誤差範圍不會超過 100m,而 GPSone 只 高出 100m 一些;而到了傳輸範圍 1.5km 時,GPSone 在一顆可見衛星區域的誤差範圍高 達了 140m,HPIM 也在 110m 左右,因此可推斷最大傳輸範圍對誤差範圍的影響甚鉅。圖 26 可見得,不論最大傳輸範圍為何,在三顆衛星搭配一個基地台的環境下,HPIM 的效 能是略優於 GPSone 的,但到了兩顆可見衛星區域時,HPIM 的誤差範圍比 GPSone 的誤差 範圍明顯低了許多。. 120 100 誤 差 範 圍. 80. m. 40. 60. GPSone. (. HPIM. ). 20 0 3. 2. 1. 可見衛星數量. 圖 27 設定最大傳輸範圍為 0.5km 的誤差範圍. 140 120. (. 誤 差 範 圍. 100 80 GPSone. 60. HPIM. m ). 40 20 0 3. 2. 1. 可見衛星數量. 29.
(40) 圖 28 設定最大傳輸範圍為 1.0km 的誤差範圍. 160 140 120 100 GPSone. 80. HPIM. 60 40 20 0 3顆衛星. 2顆衛星. 1顆衛星. 圖 29 設定最大傳輸範圍為 1.5km 的誤差範圍. 圖 30 至圖 32 顯示出,最大傳輸範圍的增加對於 GPSone 與 HPIM 的定位成功率,只 有些微下降。在最大傳輸範圍為 0.5km、1.0km 時,GPSone 整體是輸給 HPIM 的,但我們 可以看到 HPIM 在最大傳輸範圍為 1.5km 時,定位成功率已經與 GPSone 相差無幾,顯示 HPIM 比 GPSone 受到傳輸範圍變化的影響還要來的大。. (. 定 位 成 功 率 %. ). 100 90 80 70 60 50 40 30 20 10 0. GPSone HPIM. 3. 2. 1. 可見衛星數量. 圖 30 設定最大傳輸範圍為 0.5km 的定位成功率. 30.
(41) (. 定 位 成 功 率 %. ). 100 90 80 70 60 50 40 30 20 10 0. GPSone HPIM. 3. 2. 1. 可見衛星數量. 圖 31 設定最大傳輸範圍為 1.0km 的定位成功率. (. 定 位 成 功 率 %. ). 100 90 80 70 60 50 40 30 20 10 0. GPSone HPIM. 3. 2. 1. 可見衛星數量. 圖 32 設定最大傳輸範圍為 1.5km 的定位成功率. 31.
(42) 第六章. 結論. 雖然 GPSone 以基地台補足衛星缺乏地區觀測值的方法可以使得可定位的覆蓋地區 更為廣泛,但是相對帶來的缺點則是誤差值非常高。為此,我們提出了一個提升定位精 準度的混合定位方法,HPIM。實驗結果顯示我們所提出方法之誤差範圍與定位成功率比 同樣以基地台補足衛星缺乏地區的 GPSone 方法還要來的好。. 32.
(43) 參考文獻 [1] A. Boukerche , Horacio A.B.F. Oliveira, Eduardo F. Nakamura ,and Antonio A.F. Loureiro,〞 Vehicular Ad Hoc Networks: A New Challenge for Localization-Based Systems〞, Computer Communications, Vol. 31, no. 12, pp. 2838-2849, July 2008. [2] S. Soliman , P. Agashe , I. Fernandez , A. Vayanos , P. Gaal , and M. Oljaca , 〞 GPSOneTM: a hybrid position location system〞, Spread Spectrum Techniques and Applications, Vol.1 , pp.330 - 335, 2000. [3] M. Femminella and G. Reali ,〞Low Satellite Visibility Areas: Extension of the GPS Capabilities to Deploy Location-Based Services〞, Vehicular Technology Magazine, IEEE ,Vol. 7 , pp. 55 - 65, 2012. [4] E. Dziadczyk , W. Zabierowski , and Napieralski,and Andrzej ,〞Satellite Navigation System GPS〞, International Conference - The Experience of Designing and Applications of, pp. 504 - 506 , July 2008. [5] L. Cong and W. Zhuang, 〞Non-line of sight error mitigation in TDOA mobile location〞, GLOBECOM, San Antonio, TX in Proc , pp. 680–684, 2001. [6] J.Blumenthal , R.Grossmann , F.Golatowsk , and D.Timmermann, 〞Weighted centroid localization in Zigbee-based sensor networks〞, IEEE International Symposium on Intelligent Signal Processing, WISP , pp.1-6, Oct. 2007. [7] L. Cong and W. Zhuang, 〞Hybrid TDOA/AOA mobile user location in wideband CDMA systems 〞, IEEE International Conference on Third Generation Wireless Communications in Proc. pp. 675-682, June 2000. [8] H. C. So and E. M. K. Shiu, 〞Performance of TOA–AOA hybrid mobile location, 〞 IEICE Trans. Fundam. 〞, vol.8 , pp. 2136–2138, Aug. 2003. [9] W. Ren, G. Li, and Lv .Jing, 〞Analysis of Adopting Mobile Position System Based on GPSOne Technique in VTS System 〞 , Intelligent System Design and Engineering Application, Vol.1 , pp.281 - 284, Oct 2010. [10] G. Angelis, G.Baruffa , and S.Cacopardi , 〞GNSS/Cellular Hybrid Positioning System for Mobile Users in Urban Scenarios 〞 , Intelligent Transportation Systems, IEEE Transactions on, Vol:14 ,pp. 313 - 321, March 2013. [11]http://hep.ccic.ntnu.edu.tw/browse2.php?s=117 , 〞全人教育百寶箱〞 33.
(44) [12]http://140.121.130.191/class6 , 〞衛星導航實驗室 〞 [13]http://www.cc.ntut.edu.tw/~twcheng/GPS-NTUT.pdf, 〞GPS 簡介 台北科技大學 鄭大 偉〞 [14] http://lunwen.freekaoyan.com/ligonglunwen/dianzi/20080217/120325680979009.sht ml, 〞蜂窩通信網絡中的無線定位技術〞,山東工商學院,山東工商學院網路中心 [15]杜昆穆, 〞基於無線訊號強度與信號平均值之區域定位系統〞,國立高雄應用科技 大學, 碩士論文, 2010 年. 34.
(45)
數據

Outline
相關文件
弱勢且學習落後的學生在全國各地區普遍可見,很多小孩 子連最基本的能力都缺乏。比方說,有 58
接收機端的多路徑測量誤差是GPS主 要誤差的原因之一。GPS信號在到達 地球沒有進到接收機之前,除了主要 傳送路徑之外,會產生許多鄰近目標 反射的路徑。接收機接收的首先是直
本書立足中華文化大背景,較為深入系統地分析研究了回族傳統法文化的形成基礎、發展歷
由於 DEMATEL 可以讓我們很有效的找出各準則構面之因果關係,因此國內外 有許多學者皆運用了 DEMATEL
譚志忠 (1999)利用 DEA 模式研究投資組合效率指數-應用
本研究旨在使用 TI-Nspire CAS 計算機之輔助教學模式,融入基礎 統計學的應用,及研究如何使用 TI-Nspire CAS
近年來國內外許多學者也紛紛投入 RFID 安全性的研究,2003 年首先由 Weis 等 學者提出了 RFID 認證協定之論文,開啟了 RFID
本研究是以景觀指數進行對 1993 年、2008 年與擴大土地使用三個時期之評 估,其評估結果做比較討論。而目前研究提供研究方法的應用-GIS 與 FRAGSTATS 之使用方法。從 1993 年至
