國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
自行車橢圓大齒盤偏心圓鏈輪系統設計 及騎乘效益分析
Design and Riding Performance Analysis of
Elliptical-Eccentric Sprockets Chain System for Bicycles
李柏緯 Li, Bo-Wei
指導教授:劉 霆 博士 Advisor: Liu, Tyng, Ph.D.
中華民國 102 年 7 月
July, 2013
I
II
誌謝
感謝恩師劉霆教授殷勤且耐心的指導,從大學時期跟隨老師進行專題研究開始
,老師不僅給予我知識上的啟發,更帶領我學會解決事情的方式以及思考問題的本 質,讓我在研究過程中受益良多,並使本論文終得以完成,在此致上衷心的敬意與 感謝。
感謝巨獅創意股份有限公司的楊泰和先生對於自行車相關研究主題的協助與 指導,使我拓展知識視野以及增進思考能力,更讓我獲得許多未曾思考過的創意思 維,並提供有趣的研究方向,最後促成了本論文的研究主題。
感謝李志中教授與尤正吉教授撥冗審閱我的論文,並以不同角度的觀點提出許
多寶貴的意見,使本論文更臻完善。
感謝財團法人自行車暨健康科技工業研究發展中心的賴永琛副理以及高旻聖 工程師,對於本研究提供不遺餘力的協助,使研究過程能順利進行。
感謝 MMT 實驗室眾多的夥伴,讓大學時期以及研究所的日子充滿多采多姿的 回憶。感謝學長羿名、柏蒼、恆銓、昱帆、聰賢、昉睍、柏宇、品翰、柏亨、正平、
博仁、芳明、振逵的提攜與照顧,並為實驗室提供許多實用的資源。感謝同屆夥伴 先予、牧民、嘉維、傳榮的互相砥礪,在悠閒時相約出遊玩車、在煩憂時相互排憂 解悶。感謝學弟彥翔、昱儒、應向、粲清、學妹芳儀為 MMT 實驗室的付出與協助,
讓碩二學長們得以在舒適的環境中完成論文。感謝長期定居在實驗室內的外來種生 物:巴西龜學長、巴西龜學妹以及美國螯蝦大家族,看著你們在水中悠哉地嬉戲是 一件非常紓壓的事。
感謝我的父母與家人的支持與鼓勵,讓我得以毫無後顧之憂地完成論文。感謝 女友品璇在我埋首論文時的陪伴與關心,並且不時以爭辯的方式訓練我的邏輯思考 能力。感謝分散在各地的台大機械 B96 級以及師大附中 67 屆同窗老友,透過網路 的連結,讓大家可以經常為彼此的生活互相交流與鼓勵,讓情感得以凝聚。
最後感謝這一路走來所有曾給予我幫助的人,您們的支持與協助皆是激勵我前 進的力量,在此致上最深的謝意,祝福您們一切平安順遂,願這份喜悅與榮耀能與 您們分享。
III
自行車橢圓大齒盤偏心圓鏈輪系統設計及騎乘效益分析
李柏緯
摘要
根據研究,自行車騎士使用橢圓大齒盤可提升騎乘效益,但僅使用單一橢圓大 齒盤時,會使鏈條在運作過程中產生部分鬆弛的現象,易導致鏈條脫鏈。使用橢圓 大齒盤搭配偏心圓鏈輪之設計可以改善鏈條鬆弛,當兩個鏈輪的節圓形狀同步變化
,可減少橢圓大齒盤所產生之鏈條鬆弛量。本研究之目的在探討自行車使用橢圓大 齒盤搭配偏心圓鏈輪之鏈條傳動系統,對於鏈條鬆弛情形的改善以及騎士騎乘效益 之影響。首先,建立橢圓大齒盤偏心圓鏈輪系統幾何數學模型,發展電腦程式,進 行數值分析,藉由調整偏心圓鏈輪之偏心量參數,尋求搭配不同長短軸比橢圓大齒 盤的偏心圓鏈輪,以達到最小鏈條鬆弛量之設計目標。其次,建立自行車騎士腿部 模擬五連桿機構運動及動力模型,配合橢圓大齒盤偏心圓鏈輪系統產生之踩踏轉速 變化數據,以及不同的曲柄安裝角度,發展電腦程式模擬腿部關節驅動力矩與輸出 功率的變化,進而探討橢圓大齒盤偏心圓鏈輪系統對於自效益的提升效果。最後,
本研究根據關節驅動力矩和輸出功率之分析數據,提出三組可提升自行車騎乘效益 之橢圓大齒盤偏心圓鏈輪系統設計參數,作為最終之設計方案。利用本研究所發展 之橢圓大齒盤偏心圓鏈輪系統幾何數學模型及設計方法,可以協助分析並改善橢圓 大齒盤造成之鏈條鬆弛情形,並達到降低騎士腿部關節負荷與提升踩踏效率之目的
,此研究成果應有助於新型自行車非圓形鏈輪系統之開發設計。
關鍵字:非圓形鏈輪、橢圓大齒盤、偏心圓鏈輪、關節驅動力矩、關節輸出功率
IV
Design and Riding Performance Analysis of
Elliptical-Eccentric Sprockets Chain System for Bicycles
Li, Bo-Wei
Abstract
The use of elliptical front sprocket can enhance the riding performance of cyclists, but would cause chain slack during operating, or lead to chain drop. The purpose of this study is to analyze the improvement of chain slack and the enhancement of riding benefits by using elliptical front sprocket combined with eccentric sprocket for bicycles.
First, the geometry mathematical model of elliptical-eccentric sprockets system and the kinematic model and the dynamic model of the leg simulation planar five-bar linkage have been established. Then, with the computer program which is developed to analyze the eccentric of sprocket, the best design parameters for different major-minor axis ratio can be found, and achieve the target of minimum chain slack. And then, with the data of cadence variation and the different crank install angle, the joint moment and joint power can also be simulated by using computer programs. Finally, according to the data of joint moment and joint power, three groups of design parameters have been raised to reduce the joint loading and enhance the pedaling efficiency. The enhancement of riding benefits compared to the traditional system would be investigated. This study could be applied in practice and promote the design and research on the non-circular sprockets for bicycles.
Keywords: non-circular sprocket, elliptical front sprocket, eccentric sprocket, joint moment, joint power
V
目錄
誌謝 ... II 摘要 ... III Abstract ... IV 目錄 ... V 圖目錄 ... VII 表目錄 ... X 符號彙整 ... XI
第一章 緒論 ... 1
1-1 前言 ... 1
1-2 文獻回顧 ... 4
1-3 研究動機與目的 ... 5
1-4 研究架構與步驟 ... 6
第二章 橢圓大齒盤偏心圓鏈輪系統幾何數學模型 ... 8
2-1 鏈輪與鏈條之幾何關係 ... 8
2-2 鏈條總長度 ... 13
2-2-1 與橢圓大齒盤嚙合之鏈條長度 ... 13
2-2-2 與偏心圓鏈輪嚙合之鏈條長度 ... 16
2-2-3 無嚙合之鏈條長度 ... 18
2-2-4 鏈條長度加總 ... 19
2-3 等效齒比 ... 19
2-4 小結 ... 22
第三章 腿部模擬五連桿機構動力模型 ... 23
3-1 角度分析 ... 23
3-2 角速度分析 ... 28
VI
3-3 角加速度分析 ... 29
3-4 動力分析 ... 30
3-5 小結 ... 36
第四章 橢圓大齒盤偏心圓鏈輪系統參數設計 ... 37
4-1 系統配置參數與程式架構 ... 37
4-2 橢圓大齒盤搭配傳統圓形鏈輪 ... 39
4-3 橢圓大齒盤搭配偏心圓鏈輪 ... 44
4-4 鏈條設計方法 ... 50
4-5 設計參數討論 ... 53
4-6 小結 ... 54
第五章 自行車騎乘效益分析 ... 56
5-1 系統配置參數與程式架構 ... 56
5-2 等效齒比變化 ... 59
5-3 腿部關節驅動力矩 ... 64
5-3-1 腿部關節驅動力矩週期最大值 ... 67
5-3-2 腿部關節驅動力矩週期平均值 ... 72
5-4 腿部關節輸出功率 ... 75
5-4-1 腿部關節輸出功率週期最大值 ... 77
5-4-2 腿部關節輸出功率週期平均值 ... 82
5-4-3 腿部關節輸出功率週期平均值總和 ... 85
5-5 設計參數討論 ... 86
5-6 小結 ... 92
第六章 結論 ... 94
6-1 結論 ... 94
6-2 未來展望 ... 96
參考文獻 ... 97
VII
圖目錄
圖 1-12006-2010 年國內自行車整車及零組件總產值[5] ... 2
圖 1-2 各家廠商所設計的自行車非圓形大齒盤 ... 4
圖 2-1 自行車橢圓大齒盤偏心圓鏈輪系統示意圖 ... 9
圖 2-2 座標旋轉示意圖 ... 10
圖 2-3 旋轉後的橢圓大齒盤偏心圓鏈輪系統 ... 10
圖 2-4 橢圓與偏心圓的公切線 ... 13
圖 2-5 以橢圓參數角標定橢圓上切點在橢圓圓弧上的位置 ... 14
圖 2-6 橢圓上切點、橢圓下切點、參數角與橢圓弧長示意圖 ... 15
圖 2-7 一小段橢圓弧長 ... 15
圖 2-8 以正圓參數角標定偏心圓上切點在偏心圓圓弧上的位置 ... 17
圖 2-9 偏心圓弧長示意圖 ... 17
圖 2-10 上切線和下切線的線段範圍 ... 18
圖 2-11 橢圓大齒盤偏心圓鏈輪系統等效齒比之幾何關係 ... 20
圖 2-12 橢圓大齒盤偏心圓鏈輪系統旋轉角度示意圖 ... 21
圖 3-1 腿部模擬平面五連桿機構示意圖(單一腿部) ... 24
圖 3-2 曲柄旋轉角度示意圖 ... 24
圖 3-3 腿部模擬平面五連桿機構之向量迴路示意圖 ... 26
圖 3-4 桿 2 之自由體圖 ... 31
圖 3-5 桿 3 之自由體圖 ... 31
圖 3-6 桿 4 之自由體圖 ... 32
圖 3-7 桿 5 之自由體圖 ... 32
圖 3-8 踏板切線與法線方向受力對曲柄旋轉角度之曲線圖 ... 35
圖 4-1 橢圓大齒盤偏心圓鏈輪系統配置示意圖 ... 38
圖 4-2 不同長短軸比橢圓大齒盤之節圓輪廓 ... 39
VIII
圖 4-3 橢圓大齒盤偏心圓鏈輪系統幾何關係分析流程圖 ... 40
圖 4-4 偏心圓鏈輪之最佳偏心量搜尋流程圖 ... 41
圖 4-5 不同長短軸比橢圓大齒盤搭配傳統圓形鏈輪之鏈條總長度週期變化圖 ... 43
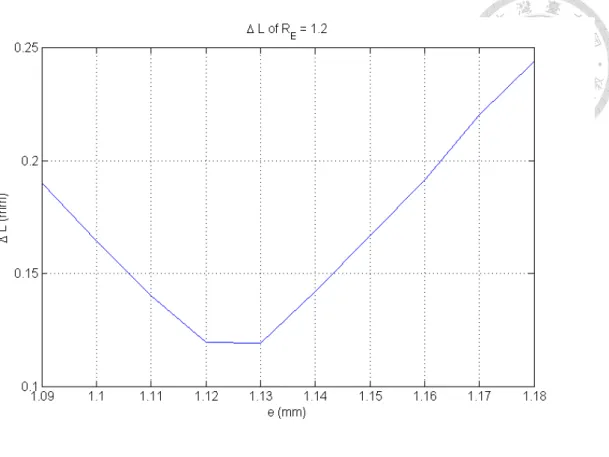
圖 4-6 長短軸比RE =1.2橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量搜尋 ... 45
圖 4-7 長短軸比RE =1.2橢圓大齒盤系統之鏈條總長度週期變化圖 ... 45
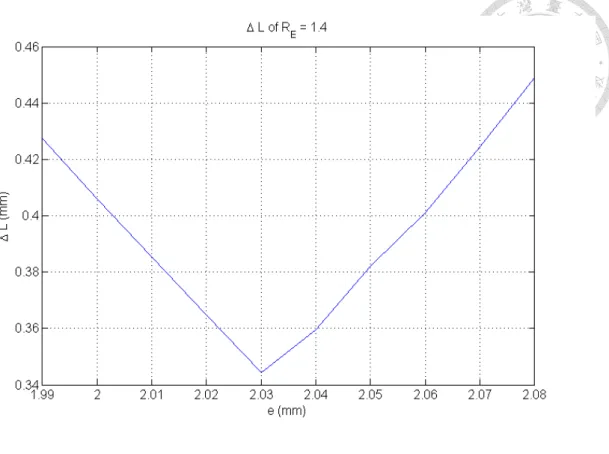
圖 4-8 長短軸比RE =1.4橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量搜尋 ... 46
圖 4-9 長短軸比RE =1.4橢圓大齒盤系統之鏈條總長度週期變化圖 ... 46
圖 4-10 長短軸比RE =1.6橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量搜尋 ... 47
圖 4-11 長短軸比RE =1.6橢圓大齒盤系統之鏈條總長度週期變化圖 ... 47
圖 4-12 長短軸比RE =1.8橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量搜尋 ... 48
圖 4-13 長短軸比RE =1.8橢圓大齒盤系統之鏈條總長度週期變化圖 ... 48
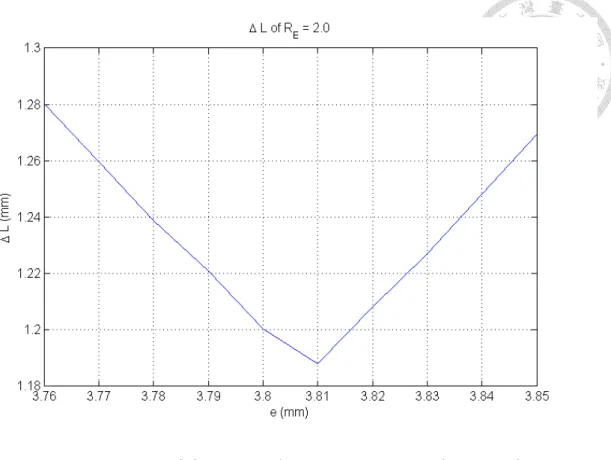
圖 4-14 長短軸比RE =2.0橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量搜尋 ... 49
圖 4-15 長短軸比RE =2.0橢圓大齒盤系統之鏈條總長度週期變化圖 ... 49
圖 4-16 橢圓大齒盤偏心圓鏈輪系統之鏈條設計方法 ... 51
圖 5-1 腿部模擬五連桿機構之運動及動力分析流程圖 ... 57
圖 5-2 曲柄安裝角度示意圖 ... 58
圖 5-3 曲柄安裝角度分析流程圖 ... 58
圖 5-4 不同長短軸比橢圓大齒盤搭配傳統圓形鏈輪系統之等效齒比週期變化圖 . 60 圖 5-5 長短軸比RE =1.2橢圓大齒盤系統之等效齒比變化圖 ... 61
圖 5-6 長短軸比RE =1.4橢圓大齒盤系統之等效齒比變化圖 ... 62
圖 5-7 長短軸比RE =1.6橢圓大齒盤系統之等效齒比變化圖 ... 62
圖 5-8 長短軸比RE =1.8橢圓大齒盤系統之等效齒比變化圖 ... 63
圖 5-9 長短軸比RE =2.0橢圓大齒盤系統之等效齒比變化圖 ... 63
圖 5-10 原始系統之踝關節驅動力矩對應踩踏角度關係圖 ... 65
圖 5-11 原始系統之膝關節驅動力矩對應踩踏角度關係圖 ... 66
圖 5-12 原始系統之髖關節驅動力矩對應踩踏角度關係圖 ... 66
IX
圖 5-13 各系統之踝關節驅動力矩週期最大與最小值對應曲柄安裝角度比較圖 ... 68
圖 5-14 各系統之膝關節驅動力矩週期最大與最小值對應曲柄安裝角度比較圖 ... 69
圖 5-15 各系統之髖關節驅動力矩週期最大與最小值對應曲柄安裝角度比較圖 ... 69
圖 5-16 各系統與原始系統之踝關節驅動力矩對應踩踏角度比較圖 ... 71
圖 5-17 各系統與原始系統之膝關節驅動力矩對應踩踏角度比較圖 ... 71
圖 5-18 各系統與原始系統之髖關節驅動力矩對應踩踏角度比較圖 ... 72
圖 5-19 各系統之踝關節驅動力矩週期平均值對應曲柄安裝角度比較圖 ... 73
圖 5-20 各系統之膝關節驅動力矩週期平均值對應曲柄安裝角度比較圖 ... 74
圖 5-21 各系統之髖關節驅動力矩週期平均值對應曲柄安裝角度比較圖 ... 74
圖 5-22 原始系統之踝關節輸出功率對應踩踏角度關係圖 ... 76
圖 5-23 原始系統之膝關節輸出功率對應踩踏角度關係圖 ... 76
圖 5-24 原始系統之髖關節輸出功率對應踩踏角度關係圖 ... 77
圖 5-25 各系統之踝關節輸出功率週期最大與最小值對應曲柄安裝角度比較圖 ... 78
圖 5-26 各系統之膝關節輸出功率週期最大與最小值對應曲柄安裝角度比較圖 ... 79
圖 5-27 各系統之髖關節輸出功率週期最大與最小值對應曲柄安裝角度比較圖 ... 79
圖 5-28 各系統與原始系統之踝關節輸出功率對應踩踏角度比較圖 ... 80
圖 5-29 各系統與原始系統之膝關節輸出功率對應踩踏角度比較圖 ... 81
圖 5-30 各系統與原始系統之髖關節輸出功率對應踩踏角度比較圖 ... 81
圖 5-31 各系統之踝關節輸出功率週期平均值對應曲柄安裝角度比較圖 ... 83
圖 5-32 各系統之膝關節輸出功率週期平均值對應曲柄安裝角度比較圖 ... 84
圖 5-33 各系統之髖關節輸出功率週期平均值對應曲柄安裝角度比較圖 ... 84
圖 5-34 各系統之關節輸出功率週期平均值總和對應曲柄安裝角度比較圖 ... 86
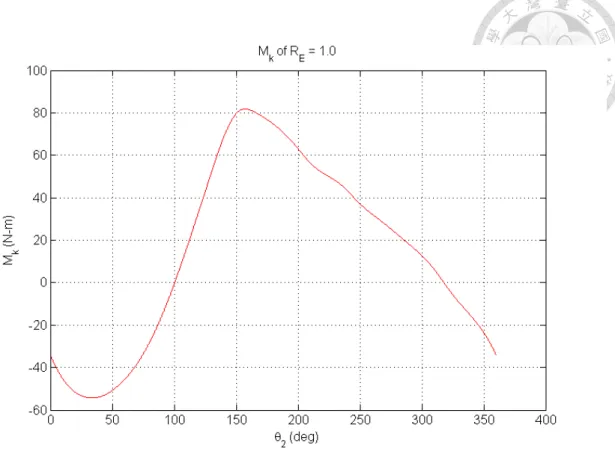
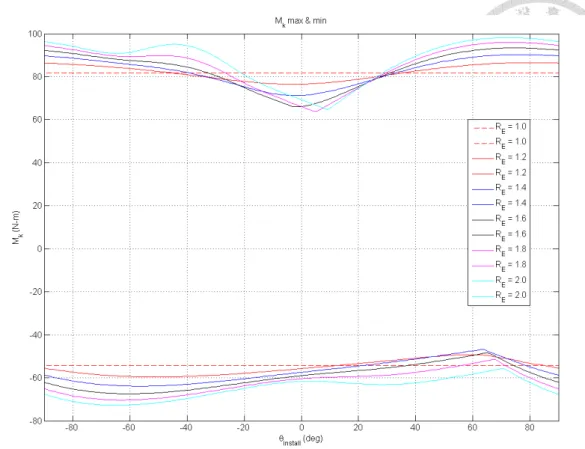
圖 5-35 踝關節驅動力矩與橢圓大齒盤偏心圓鏈輪系統等效齒比比較圖 ... 89
圖 5-36 膝關節驅動力矩與橢圓大齒盤偏心圓鏈輪系統等效齒比比較圖 ... 90
圖 5-37 髖關節驅動力矩與橢圓大齒盤偏心圓鏈輪系統等效齒比比較圖 ... 91
X
表目錄
表 2-1 橢圓大齒盤偏心圓鏈輪系統鏈輪旋轉角度對應關係之誤差分析數據 ... 22
表 4-1 橢圓大齒盤偏心圓鏈輪系統參數說明 ... 38
表 4-2 不同長短軸比橢圓大齒盤搭配傳統圓形鏈輪之鏈條總長度週期變化數據 . 43 表 4-3 不同長短軸比橢圓大齒盤搭配之偏心圓鏈輪最佳偏心量分析結果數據 ... 44
表 4-4 實際鏈條總長度計算數據 ... 52
表 4-5 不同長短軸比橢圓大齒盤偏心圓鏈輪系統之中心距與偏心量微調後數據 . 52 表 4-6 未優化之鏈條總長度週期變化量與最佳偏心量之固定比例關係 ... 54
表 5-1 腿部模擬五連桿機構參數 ... 59
表 5-2 不同長短軸比橢圓大齒盤搭配傳統圓形鏈輪系統之等效齒比分析數據 ... 60
表 5-3 不同長短軸比橢圓大齒盤系統之等效齒比變化數據 ... 64
表 5-4 各系統之關節驅動力矩週期最大值分析數據 ... 68
表 5-5 各系統之關節驅動力矩週期平均值分析數據 ... 73
表 5-6 各系統之關節輸出功率週期最大值分析數據 ... 78
表 5-7 各系統之關節輸出功率週期平均值分析數據 ... 83
表 5-8 各系統之關節輸出功率週期平均值總和分析數據 ... 85
表 5-9 針對不同腿部關節之橢圓大齒盤偏心圓鏈輪系統最終設計方案 ... 88
XI
符號彙整
a 2x 曲柄質心於x方向之加速度 a 2y 曲柄質心於 y 方向之加速度 a 3x 腳板質心於x方向之加速度 a 3y 腳板質心於y方向之加速度 a 4x 小腿質心於x方向之加速度 a 4y 小腿質心於y方向之加速度 a 5x 大腿質心於x方向之加速度 a 5x 大腿質心於y方向之加速度
c 橢圓大齒盤和偏心圓鏈輪之中心距
CG 2 曲柄質心與曲柄軸之距離 CG 3 腳板質心與踝關節之距離 CG 4 小腿質心與膝關節之距離 CG 5 大腿質心與髖關節之距離
e 偏心圓鏈輪之偏心量
F 自行車騎士腿部模擬五連桿機構自由度
F ax 踝關節於x方向之受力 F ay 踝關節於y方向之受力 F fn 腳板於法線方向之受力 F ft 腳板於切線方向之受力 F hx 髖關節於x方向之受力 F hy 髖關節於 y 方向之受力 F kx 膝關節於x方向之受力 F ky 膝關節於y方向之受力 F ox 曲柄軸承於x方向之受力
XII
F oy 曲柄軸承於y方向之受力
g 重力加速度
I 2 曲柄對其質心之轉動慣量 I 3 腳板對其質心之轉動慣量 I 4 小腿對其質心之轉動慣量 I 5 大腿對其質心之轉動慣量
j 腿部模擬五連桿機構旋轉對接頭數目
k 公切線方程式常數項
L 鏈條總長度
Lmax 鏈條總長度週期最大值 Lmin 鏈條總長度週期最小值
LD 鏈條之下切線段長度
LE 與橢圓大齒盤嚙合之鏈條長度
LN 無嚙合之鏈條長度
LR 與偏心圓鏈輪嚙合之鏈條長度
Lreal 實際鏈條總長度
LU 鏈條之上切線段長度
m 公切線斜率
m 2 曲柄質量
m 3 腳板質量
m 4 小腿質量
m 5 大腿質量
M a 踝關節之驅動力矩 M h 髖關節之驅動力矩 M k 膝關節之驅動力矩
n 等效齒比
XIII
nmax 等效齒比週期最大值 nmean 等效齒比週期平均值 nmin 等效齒比週期最小值
N 腿部模擬五連桿機構桿件數目
N E 橢圓大齒盤齒數
N R 偏心圓鏈輪齒數
P 鏈條節距
P a 踝關節輸出功率
P h 髖關節輸出功率
P k 膝關節輸出功率
r 1 座管之功能長度
r 2 曲柄之功能長度
r 3 腳板之功能長度
r 4 小腿之功能長度
r 5 大腿之功能長度
1
rE 橢圓大齒盤長軸長度
2
rE 橢圓大齒盤短軸長度
rEP 橢圓軸心至上切線之垂直距離
rET 橢圓軸心至橢圓上切點之連線距離
r R 偏心圓鏈輪半徑
1
r R 偏心圓鏈輪之長軸長度
2
r R 偏心圓鏈輪之短軸長度
r RP 偏心圓軸心至上切線之垂直距離
r RT 偏心圓軸心至偏心圓上切點之連線距離 R E 橢圓大齒盤之長軸短軸比
s 鏈條鬆弛長度百分率
XIV
α2 曲柄角加速度
α3 腳板角加速度
α4 小腿角加速度
α5 大腿角加速度
αE 橢圓大齒盤角加速度
Δ L 鏈條總長度週期變化量
Δn 等效齒比週期變化量
Δt 單位時間間隔
θE
Δ 橢圓大齒盤單位旋轉角度
θR
Δ 偏心圓鏈輪單位旋轉角度
φ r 線段與ET r 線段之夾角 EP
θ1 座管方向向量與 y+ 軸之夾角 θ2 曲柄方向向量與 y+ 軸之夾角 θ3 腳板方向向量與 y+ 軸之夾角 θ4 小腿方向向量與 y+ 軸之夾角 θ5 大腿方向向量與 y+ 軸之夾角
θE 橢圓大齒盤旋轉角度(橢圓長軸與 x+ 軸之夾角)
in sta ll
θ 曲柄安裝角度(曲柄與橢圓大齒盤長軸之夾角)
θR 偏心圓鏈輪旋轉角度(偏心圓長軸與+x軸之夾角)
1
θT 橢圓上切點之橢圓參數角
2
θT 橢圓下切點之橢圓參數角
3
θT 偏心圓上切點之正圓參數角
4
θT 偏心圓下切點之正圓參數角
ω2 曲柄之角速度
ω3 腳板之角速度
ω4 小腿之角速度
XV
ω5 大腿之角速度
ωE 橢圓大齒盤角速度
ωR 偏心圓鏈輪角速度
ψ r 線段與RT r 線段之夾角 RP
1
第一章 緒論
1.
1-1 前言
自行車在 19 世紀發明以來,經歷一百餘年之發展,現今已成為世界上使用最 廣泛的非石化燃料交通工具。在邁入 21 世紀後,石化能源供應成本提高,更使得 自行車成為備受注目的綠色交通工具。而國內自行車工業發展始自於第二次大戰 以後,至今已成為世界上主要的自行車製造地區之一。
根據統計,2007 年時全球自行車年產量已達 1.3 億輛[1],而 2008 年台灣地區 自行車年外銷量,亦達 540 萬輛,平均輸出單價亦達 257 美元[2],在當時金融海 嘯中,自行車業逆勢突出,表現亮眼,為我國賺入巨額外匯。而國內自行車產業,
自 2002 年台灣自行車廠商為了挽救產業外移大陸而導致自行車出口銳減之趨勢,
其中的巨大公司及美利達公司,結合 11 家零組件廠於 2002 年共同倡議,並自 2003 年 1 月 1 日正式成立了社團法人台灣自行車協進會「A-TEAM」[3],致力於國內 自行車零組件之發展與生產,跳脫了國內自行車廠過往皆為組裝及整車出口的模 式。
零組件亦成為國內自行車產業的重要產值,並有助於國內自行車產業品質提 升及品牌塑造。每輛外銷自行車平均售價,由 2008 年的 257 美元,上漲到 2011 年 379 美元;零組件銷售總額,亦從 2008 年 5.48 億美元上漲到 2011 年 7.82 億美 元;而自行車總產值亦自 2006 年 599 億元上升至 2010 年 929 億元,足見零組件 系統之升級與進步對於內自行車產業之影響深遠。因此,如何保有國內自行車零 組件之產業優勢,並積極開發有市場價值之自行車零組件以提升產業競爭力,成 為國內自行車產業必須面對之課題。
2
目前自行車依其功能構造一般可分為:(1)傳動系統 (2)變速系統 (3)車架系統 (4)輪轂系統 (5)剎車系統[4],分述如下:
(1) 傳動系統:由曲柄組、鏈條、大齒盤、鏈輪及後輪單向離合器所組成。
(2) 變速系統:由變速拉桿(或旋轉變速握把)、變速器及拉線所組成。
(3) 車架系統:由主車架、座椅、座管及懸吊系統所組成。
(4) 輪轂系統:由輪圈、內胎、外胎、花鼓及輻絲所組成。
(5) 剎車系統:由剎車器、剎車握把及剎車線所組成。
圖 1-1 2006-2010 年國內自行車整車及零組件總產值[5]
自行車傳動系統的主要功能即是傳輸來自人體給予自行車的動力,是自行車 最重要的部分。其設計訴求會圍繞著騎乘者最重要的兩種需求:將動力從騎乘者 的腿部傳送至車輪、以及可以使騎乘者在舒適的動作或速度下騎乘。圍繞著這兩 點基本訴求,傳動系統的設計目標將會朝向下列兩者的其中之一進行:最有效率 的輸出方式、或是效率稍差但可以使踩踏過程較舒適的輸出方式。換句話說,良 好的傳動系統設計可以使騎乘者獲得更舒適、更有效率的騎乘過程,同時也可減
599 716 904 790 929
0 100 200 300 400 500 600 700 800 900 1000
2006 2007 2008 2009 2010
億元(台幣)
國內自行車整車及零組件總產值
3
少腿部關節在騎乘過程中的負荷及能量損耗、並減少運動傷害發生的可能性。
一組自行車傳動系統的核心零組件包含:鏈條、大齒盤與鏈輪,目前市面上 的大齒盤和鏈輪產品,大多為圓形的設計。圓形的大齒盤及鏈輪可以讓自行車騎 士在一個踩踏週期中,皆有相同的踩踏轉速,而且圓形大齒盤也有形狀簡單、製 造容易的優點。不過由於人體腿部在進行踩踏運動時,肌肉收縮與拉伸所形成的 踩踏力並不保持固定,踩踏力會有週期性的變化。因此,可保持固定踩踏轉速的 圓形大齒盤,未必是最適合腿部踩踏運動的設計。有鑑於此,從二十多年前開始,
就陸續有少數的廠商設計出非圓形大齒盤產品,可讓腿部在踩踏過程中產生踩踏 轉速變化,例如:日本自行車零組件大廠島野(Shimano)設計的「Biopace」、西班 牙廠商 ROTOR 的「Q-Ring」、法國廠商 Osymetric 的「Harmonic Ring」以及台灣 廠商 RIDEA 的「功率盤」(見圖 1-2)。此類非圓形大齒盤的節圓形狀皆以橢圓形為 基礎,各家廠商再針對橢圓圓弧形狀進行不同的優化改良。製造廠商宣稱非圓形 大齒盤是較符合人體工學的設計,可有效提升踩踏的效率,並減輕腿部關節的負 荷。不過由於非圓形大齒盤的售價較為高昂,而且使用非圓形大齒盤時,鏈條在 運作週期中會有部分時間出現鬆弛的現象,可能較易產生脫鏈的問題,因此目前 此類非圓形大齒盤尚未在市面上普及。
為了改善非圓形大齒盤在運作過程中產生之鏈條鬆弛現象,將其搭配的後鏈 輪也改為非圓形的設計,利用兩個鏈輪節圓形狀的同時變化,試圖減少系統運作 時所產生之鏈條鬆弛量,不失為一個可行的解決方法。本研究針對楊泰和[6]專利 中之自行車橢圓大齒盤搭配偏心圓鏈輪系統,探討將橢圓大齒盤所搭配之傳統圓 形鏈輪改為偏心圓鏈輪後,使用不同參數設計對於鏈條鬆弛量之改善情形,並尋 求最佳的參數設計與安裝配置方法。此外,本研究也將探討使用橢圓大齒盤搭配 偏心圓鏈輪時,對於自行車騎士腿部關節負荷與踩踏效率之影響,期望此設計能 有效降低關節負荷並提升踩踏效率,增進自行車之騎乘效益。
4
圖 1-2 各家廠商所設計的自行車非圓形大齒盤
1-2 文獻回顧
目前市面上的自行車非圓形大齒盤雖然有多種不同的外形,但皆以一個長軸 搭配一個短軸的正橢圓形或類橢圓形狀為主,本論文將著重在正橢圓形的大齒盤,
並搭配偏心圓形鏈輪形成的新型自行車鏈條傳動系統。自行車騎士使用非圓形大 齒盤的研究已有許多成果,Dailey 與 Dailey[11]以及 Harrison[12]發表之研究皆顯示
,經由多位自行車騎士的實際測試,使用橢圓大齒盤有助於提升腿部踩踏的輸出 功率。Henderson 等人進行之研究[13],使用橢圓大齒盤的自行車騎士,相較於使
(c) Osymetric -「Harmonic Ring」[9] (d) RIDEA -「功率盤」[10]
(a) Shimano -「Biopace」[7] (b) ROTOR -「Q-Ring」[8]
5
用傳統圓形大齒盤的騎士有較高的踩踏效率。Bisi 等人的研究[14]更進一步指出,
在進行等功率輸出的自行車踩踏運動時,使用橢圓大齒盤可以降低腿部關節的驅 動力矩負荷。
由於曲柄與橢圓大齒盤安裝角度的不同,會造成不同的踩踏轉速變化情形,
所以曲柄的安裝位置也是一個值得研究的課題,Miller 和 Ross[15] 以及 Hull 等人 [16]的研究著重於曲柄安裝方向垂直於橢圓大齒盤長軸的情形,此二項研究均指出
,使用這種安裝方式的橢圓大齒盤,可在進行等功率輸出的踩踏運動時,有效降 低腿部的能量消耗。不過,Okajima[17]的研究則表示,曲柄安裝方向平行於橢圓 大齒盤長軸的方式,可使踩踏運動較為省力,因此關於橢圓大齒盤的曲柄安裝位 置設計,仍有賴進一步的分析研究。
自行車騎士腿部驅動力矩研究的部分,Hull 和 Jorge[18]建立一組可模擬腿部 骨骼與肌肉的五連桿機構,並提出腿部關節驅動力矩的分析方法。Redfield 和 Hull[19]針對腿部踩踏轉速與關節驅動力矩負荷的研究顯示,關節的驅動力矩和踩 踏轉速有極大的關聯性,並可根據不同的踩踏輸出功率以及自行車車架與騎士腿 部的幾何參數,以腿部五連桿機構模擬的方式,尋求最佳的踩踏轉速,使騎士有 較低的關節驅動力矩負荷。
1-3 研究動機與目的
本研究針對楊泰和[6]專利中之自行車橢圓大齒盤搭配偏心圓鏈輪系統,探討 自行車鏈條傳動系統使用橢圓大齒盤所產生之鏈條鬆弛情形,並使用偏心圓鏈輪 取代傳統圓形鏈輪,用以搭配橢圓大齒盤運行,期望能改善鏈條鬆弛之情形;此 外,本研究也將探討橢圓大齒盤搭配偏心圓鏈輪系統,在不同的曲柄安裝角度時,
對於自行車騎士腿部關節負荷與踩踏效率之影響,並提出最佳的曲柄安裝角度設
6
計方案。本研究期望透過發展一套完整的設計、模擬與分析方法,實現橢圓大齒 盤搭配偏心圓鏈輪的自行車鏈條傳動系統設計,以供後續研究時之參考。
1-4 研究架構與步驟
本研究針對自行車橢圓大齒盤偏心圓鏈輪之鏈條傳動系統進行探討。首先,
建立橢圓大齒盤搭配傳統圓形鏈輪之幾何數學模型,討論鏈條鬆弛量的變化情形,
並根據鏈條鬆弛的狀況,設計一組偏心圓鏈輪取代傳統圓形鏈輪,建立一套完整 的分析與設計方法。接著,進行自行車騎士腿部騎乘效益的分析,對橢圓大齒盤 偏心圓鏈輪之鏈條傳動系統,搭配不同的曲柄安裝角度,進行系統模擬與效益分 析,尋求最佳的曲柄安裝角度,並確認所得之系統確實能夠達到提升自行車騎乘 效益之目的。本研究各章節重點分述如下。
第一章 緒論:前言、介紹本研究之相關文獻、研究動機與目的、論文架構與研究 步驟。
第二章 橢圓大齒盤偏心圓鏈輪系統幾何數學模型:針對楊泰和[6]專利中之自行車 橢圓大齒盤搭配偏心圓鏈輪系統,建立此系統之幾何模型,並推導此系統 之鏈條長度計算方程式,以及此系統等效齒比之定義。
第三章 腿部模擬五連桿機構動力模型:介紹本研究所使用之成人腿部模擬平面五 連桿機構模型,並進行運動與動力方程式之推導。先由向量迴路方程式列 出各桿件幾何關係,依序推得角度、角速度以及角加速度之關係式,再進 一步以力與力矩平衡的原理為基礎,列出各桿件之動力平衡方程式,即可 求得穩態騎乘的狀況下,腿部五連桿機構之各項動力特性。
第四章 橢圓大齒盤偏心圓鏈輪系統參數設計:以 MATLAB 軟體撰寫模擬程式,
對橢圓偏心圓鏈輪系統之幾何關係進行模擬,探討不同長短軸比橢圓大齒
7
盤,可搭配的偏心圓鏈輪最佳偏心量。接著,使用真實鏈條的節距參數進 行鏈條設計,並探討鏈輪中心距的微調量,使本系統之鏈條有最佳的配置 狀態,
第五章 自行車騎乘效益分析:以腿部關節驅動力矩與關節輸出功率之大小為指標
,使用 MATLAB 軟體撰寫模擬程式,針對腿部五連桿機構之動力模型進 行模擬,探討不同長短軸比橢圓大齒盤系統所產生之等效齒比變化差異,
相較於傳統圓形大齒盤系統,對於自行車騎士騎乘效益之提升效果。此外,
並探討不同的曲柄與橢圓大齒盤安裝角度設計,對於騎乘效益之影響,藉 此尋求騎乘效益最佳之安裝角度設計。
第六章 結論:本研究之研究成果,與未來可繼續研究之方向。
8
第二章 橢圓大齒盤偏心圓鏈輪系統幾何數學模型
Equation Chapter 2 Section 1
2.
在進行後續的分析前,需先針對橢圓大齒盤搭配偏心圓鏈輪系統之幾何數學 模型進行推導,以得知各項設計參數的組合關係,並推導此系統之鏈條長度計算 方程式。
為簡化運動分析模型,本章使用之假設如下:
1. 以兩個鏈輪之節圓輪廓視為鏈輪外形輪廓。
2. 鏈條緊密包覆在兩鏈輪節圓輪廓的外圍,並假設為一條可彎曲之撓性線。
2-1 鏈輪與鏈條之幾何關係
本節對自行車橢圓大齒盤偏心圓鏈輪系統,進行幾何關係的介紹,並推導出 連接橢圓大齒盤與偏心圓鏈輪的兩條外公切線方程式,將此兩條外公切線視為模 擬之鏈條。系統配置如圖 2-1 所示,以橢圓大齒盤的軸心為此系統的座標原點,令 橢圓長軸在初始狀態下和x軸平行,橢圓短軸在初始狀態下和y軸平行,偏心圓之 長軸與短軸在初始狀態下皆平行x軸。橢圓之標準方程式為:
2 2
2 2
1 2
1
E E
x y
r +r = (2-1)
令橢圓偏心圓公切線之二元一次方程式為:
y=mx+k (2-2)
為了使公切線滿足與橢圓相切的條件,需將(2-2)式代入(2-1)式:
2 2
2 2
1 2
( ) 1
E E
x mx k
r r
+ + = (2-3)
(2-3)式經過整理後可得:
2 2 2 2 2 2 2 2 2
2 1 1 1 1 2
(rE +rE m )x +(2mkrE )x+rE k −rE rE =0 (2-4)
9
由於橢圓和公切線只能有一個交點,所以令此二元一次方程式之判別式等於零。
(2-4)式之判別式為:
2 2 2 2 2 2 2 2 2
1 2 1 1 1 2
(2mkrE ) −4(rE +rE m )(rE k −rE rE )=0 (2-5) (2-5)式經過整理後可得:
4 2 2 2 2 2 2 4
1 2 1 2 1 2
4rE rE m −4rE rE k +4rE rE =0 (2-6)
其中,各項參數分別如下所示:
r :橢圓半長軸長度(mm) E1
2
rE :橢圓半短軸長度(mm) m:公切線斜率
k:公切線方程式常數項
1
rE
2
rE
rEP
e c
rR 1
rR 2
rR
rRP
x y
圖 2-1 自行車橢圓大齒盤偏心圓鏈輪系統示意圖
由於要考慮橢圓大齒盤旋轉後的情形,因此使用座標軸旋轉公式計算橢圓旋 轉後的幾何關係。座標旋轉之示意圖如圖 2-2 所示。使用座標軸旋轉公式得到旋轉 座標和原座標的關係式:
cos E sin E
x=x′ θ −y′ θ (2-7)
sin E cos E
y=x′ θ +y′ θ (2-8)
10
其中,各項參數分別如下所示:
x′、y′:旋轉後的新座標
θE:橢圓大齒盤旋轉角度(橢圓長軸與x軸之夾角,以x軸正方向為 0 度,
以逆時鐘方向為正)
x y
x′ y′
θE
圖 2-2 座標旋轉示意圖
1
rE
2
rE
rEP e
c
rR
rRP
θR
θE
y
x x′
y′
圖 2-3 旋轉後的橢圓大齒盤偏心圓鏈輪系統
由於橢圓大齒盤會隨著旋轉座標同步旋轉,因此對於旋轉座標而言,橢圓方 程式並不會因為座標旋轉而改變。但是,本研究將公切線固定在原座標上,因此 先求得基於旋轉座標的公切線方程式,再代入基於旋轉座標之橢圓方程式中求解,
11
會使計算過程較為簡便。將(2-7)式和(2-8)式代入公切線方程式後,可得到基於旋 轉座標之公切線方程式:
( sinx′ θE+y′cosθE)=m x( cos′ θE−y′sinθE)+ (2-9) k 將(2-9)式整理後可得到:
cos sin
( )
sin cos sin cos
E E
E E E E
m k
y x
m m
θ θ
θ θ θ θ
′= − ′+
+ + (2-10)
=m x′ ′+k′
從(2-10)式可得知座標旋轉後的公切線斜率m′和常數項k′,將m′和k′代入橢圓與 公切線的判別式(2-6)式,取代原本式子中的m和k,可得到:
14 22 2 12 22 2 12 24
cos sin
4 ( ) 4 ( ) 4 0
sin cos sin cos
E E
E E E E E E
E E E E
m k
r r r r r r
m m
θ θ
θ θ θ θ
− − + =
+ + (2-11)
整理後可得:
4 2 2 2 4 2 2
1 2 1 2
2 4 4 2
1 2 1 2
2 2 2 4 2 2 2 4 2
1 2 1 2 1 2
(4 cos 4 sin )
(8 sin cos 8 sin cos ) 4 4 sin 4 cos 0
E E E E E E
E E E E E E E E
E E E E E E E E
r r r r m
r r r r m
r r k r r r r
θ θ
θ θ θ θ
θ θ
+
+ −
− + + =
(2-12)
此為可適用於橢圓旋轉後之橢圓與公切線判別式。
求得橢圓大齒盤與公切線的判別式後,接著也要推導出偏心圓鏈輪與公切線 的判別式。由於偏心圓的旋轉中心並非圓心,圓心會在旋轉時不斷地改變其位置,
所以在推導偏心圓方程式時,預先代入偏心圓的旋轉角度,會使計算過程較為簡 便。根據圖 2-3,可列出偏心圓的方程式為:
2 2 2
(x− −c ecosθR) +(y−esinθR) =rR (2-13) 為了使公切線滿足與偏心圓相切的條件,需將公切線方程式(2-2)式代入(2-13)式:
2 2 2
(x− −c ecosθR) +(mx+ −k esinθR) =rR (2-14)
12
將(2-14)式整理後可得:
2 2
2 2 2 2 2 2 2
( 1) ( 2 2 cos 2 2 sin )
cos sin 2 cos 2 sin 0
R R
R R R R R
m x c e mk me x
c k r e e ce ke
θ θ
θ θ θ θ
+ + − − + −
+ + − + + + − = (2-15)
由於偏心圓和公切線只能有一個交點,所以令此二元一次方程式的判別式等於零。
(2-15)式的判別式為:
2 2 2 2 2
2
2 2 2 2
(4 4 4 cos 8 cos )
(8 sin 8 cos sin 8 cos 8 ) 4 4 4 sin 8 sin 0
R R R
R R R R
R R R
r c e ce m
ce e ke ck m
r k e ke
θ θ
θ θ θ θ
θ θ
− − −
+ + − −
+ − − + =
(2-16)
其中,各項參數分別如下所示:
r :偏心圓鏈輪的半徑 R
c :兩個鏈輪的中心距
e :偏心圓鏈輪的偏心量(圓形鏈輪往右偏心為正) θR:偏心圓鏈輪的旋轉角度(逆時鐘方向為正)
最後,將(2-12)式和(2-16)式結合成二元二次聯立方程式,並解出公切線斜率m 與常數項k,共會得到四組解,因為此系統共會有四條公切線,如圖 2-4 所示。其 中編號 2 和 3 的兩條內公切線需要捨棄,因為本系統的鏈條並不會產生此種狀態,
只取編號 1 和 4 兩條外公切線以及公切線和兩個鏈輪的切點進行後續的計算。為 了後續說明的方便,將編號 1 的外公切線簡稱為上切線,編號 4 的外公切線簡稱 為下切線。
13
x y
1 2
3
4
上切線
下切線 圖 2-4 橢圓與偏心圓的公切線
2-2 鏈條總長度
本節將推導橢圓大齒盤偏心圓鏈輪系統的鏈條總長度計算方程式,利用前一 節所建立之橢圓大齒盤偏心圓鏈輪系統模型,計算在鏈條無鬆弛狀態下之鏈條總 長度。
2-2-1 與橢圓大齒盤嚙合之鏈條長度
計算嚙合在橢圓大齒盤上的鏈條長度時,先使用橢圓參數角標定公切線(即為 鏈條)與橢圓的兩個切點(即為鏈條與橢圓大齒盤的接觸點)位置,得到兩個切點的 橢圓參數式,再使用數值積分的方式求得嚙合在橢圓大齒盤圓弧上的鏈條長度。
首先,將橢圓與上切線的切點稱為橢圓上切點,橢圓與下切線的切點稱為橢圓下 切點,令橢圓上切點座標為( ,x y ,根據圖 2-5 所示之幾何關係,橢圓上切點的1 1) 橢圓參數角計算式為:
1 1
1
1
cos ( )
T
E
x
θ = − r (2-17)
14
橢圓上切點的橢圓參數式即為:
1 E1cos T1
x =r θ (2-18)
1 E2sin T1
y =r θ (2-19)
同理,也可求得橢圓下切點( ,x y 的橢圓參數角計算式,橢圓下切點的參數角2 2) θT2 如圖 2-6 所示。但因反三角函數cos−1的定義範圍僅在0≤ ≤θ π,所以將橢圓下切點 的橢圓參數角計算式略作修改:
1 2
2
1
2 cos ( )
T
E
x
θ = π− − r (2-20)
橢圓下切點的橢圓參數式即為:
2 E1cos T2
x =r θ (2-21)
2 E2sin T2
y =r θ (2-22)
y
x
1
rE
2
rE
1cos 1
E T
r θ
2sin 1
E T
r θ
1
θT
1 1
( ,x y)
圖 2-5 以橢圓參數角標定橢圓上切點在橢圓圓弧上的位置
15
y
x
1
θT
1 1
( ,x y)
2
θT
2 2
( ,x y ) LE
圖 2-6 橢圓上切點、橢圓下切點、參數角與橢圓弧長示意圖
y
x θT ( , )x y
T T
θ + Δθ ( ,x y′ ′)
圖 2-7 一小段橢圓弧長
根據橢圓的基本數學理論以及羅居剛、雷宏波所做的研究[20],橢圓形的周長 與弧長皆沒有封閉的解析表達式,僅能使用近似方程式求得近似值。但使用近似 方程式求得之近似值有較大的誤差,因此本研究使用黃景德所推導之橢圓周長弧 長數值積分法[21],以數值積分的方式求得較精確之橢圓弧長。配合示意圖 2-6 及 圖 2-7,橢圓上切點和橢圓下切點所包圍的橢圓弧長數值積分公式如下所示:
16
2
1
2 2
( ) ( )
T
T
LE x x y y
θ θ
′ ′
=
− + − (2-23)1cos
E T
x=r θ
2sin
E T
y=r θ
1cos( )
E T T
x′ =r θ + Δθ
2sin( )
E T T
y′ =r θ + Δθ
2 1
T T
T n
θ θ
θ −
Δ =
為了檢查此數值積分公式的誤差,將橢圓的長短軸比例設定為rE1/rE2 = ,即1 成為正圓形,再使用此數值積分公式計算一個完整的圓周長,和已知的圓周長公 式進行比較,得知此數值積分公式在n =104時,圓周長的誤差百分比為 0.01%,
其誤差量非常小。
2-2-2 與偏心圓鏈輪嚙合之鏈條長度
計算嚙合在偏心圓鏈輪上的鏈條長度時,由於偏心圓為正圓形加上偏心量,
因此可直接使用正圓形周長公式計算圓弧長度。先使用正圓參數角標定公切線(即 為鏈條)與偏心圓的兩個切點(即為鏈條與偏心圓鏈輪的接觸點)位置,得到兩個切 點的正圓參數式,再使用圓形周長公式計算圓弧長度。首先,將偏心圓與上切線 的切點稱為偏心圓上切點,偏心圓與下切線的切點稱為偏心圓下切點,令偏心圓 上切點座標為( ,x y ,根據圖 2-8 所示之幾何關係,偏心圓上切點的正圓參數角3 3) 的計算式為:
1 3
3 cos ( )
T
R
x
θ = − r (2-24)
17
同理,也可求得偏心圓下切點( ,x y 的正圓參數角計算式,偏心圓下切點的參數4 4) 角θT4如圖 2-9 所示。但因反三角函數cos−1的定義範圍僅在0≤ ≤θ π,所以將偏心 圓下切點的正圓參數角計算式略作修改:
1 4
4 2 cos ( )
T
R
x
θ = π− − r (2-25)
x y
3 3
( ,x y )
3
θT
c cos 3
R T
r θ
sin 3
R T
r θ
圖 2-8 以正圓參數角標定偏心圓上切點在偏心圓圓弧上的位置
x y
3 3
( ,x y )
4 4
( ,x y )
3
θT 4
θT
c
圖 2-9 偏心圓弧長示意圖
18
求得偏心圓上切點和偏心圓下切點的正圓參數角後,如圖 2-9 所示,即可進一步求 得偏心圓上切點和偏心圓下切點所包圍的偏心圓弧長度:
3 (2 4)
2 2
T T
R R
L πr θ π θ
π
+ −
= ⋅ (2-26)
2-2-3 無嚙合之鏈條長度
求得橢圓上切點、橢圓下切點、偏心圓上切點以及偏心圓下切點之後,即可 確定上切線與下切線之線段範圍,如圖 2-10 所示。藉由線段長度計算公式,即可 求出上切線與下切線的線段長度。上切線段長度計算式為:
2 2
3 1 3 1
( ) ( )
LU = x −x + y −y (2-27) 同理可知,下切線段長度計算式為:
2 2
4 2 4 2
( ) ( )
LD = x −x + y −y (2-28) 將上切線段長度與下切線段長度相加,即為無嚙合之鏈條長度:
N U D
L =L + (2-29) L
x y
1 1
( ,x y )
2 2
( ,x y )
3 3
( ,x y )
4 4
( ,x y )
圖 2-10 上切線和下切線的線段範圍
19
2-2-4 鏈條長度加總
將本節(2-23)式、(2-26)式以及(2-29)式求得之每一段鏈條長度相加,即可求得 此系統之鏈條總長度:
E R N
L=L +L + (2-30) L
2-3 等效齒比
由於本系統所使用的鏈輪並非正圓形,因此在系統運作的過程中,兩個鏈輪 的角速度比會不斷地改變。本節將利用橢圓大齒盤偏心圓鏈輪系統之幾何關係,
推導出兩個鏈輪的角速度比計算方程式。已知鏈條運行時,在兩個鏈輪和鏈條的 切點上,有鏈條切線速度相等的關係,根據圖 2-11 所示之幾何關係,可列出鏈條 切線速度相等之關係式:
cos cos
ET E RT E
r ω φ=r ω ψ (2-31)
將(2-31)式整理後可得到角速度比之關係式:
cos cos
E RT RP
R ET EP
r r
n r r
ω ψ
ω φ
= = = (2-32)
其中,各項參數分別如下所示:
rET :橢圓軸心至橢圓上切點之連線距離 rRT :偏心圓軸心至偏心圓上切點之連線距離 r :橢圓軸心至上切線之垂直距離 EP
r :偏心圓軸心至上切線之垂直距離 RP
ωE:橢圓大齒盤角速度
ωR:偏心圓鏈輪角速度
φ:rET 線段與r 線段之夾角 EP ψ:rRT 線段與r 線段之夾角 RP
20
r
ETr
RTx y
φ
ET E
r ω
ψ φ ψ
RT R
r ω
ω
Eω
Rr
EPr
RP圖 2-11 橢圓大齒盤偏心圓鏈輪系統等效齒比之幾何關係
本研究將此角速度比n定義為等效齒比,用以表示鏈輪運行過程中,在某個旋 轉角度當下的鏈條傳動系統等效齒數比。等效齒比以偏心圓鏈輪角速度為分母,
以橢圓大齒盤角速度為分子,可在自行車定速巡航時(即偏心圓鏈輪角速度固定),
反映出騎士踩踏轉速之變化。
為了分析本系統運轉時的幾何關係變化,本研究使用數值分析方法,在偏心 圓鏈輪每旋轉 0.1 度角時(偏心圓鏈輪單位旋轉角度Δ =θR 0.1),重新計算本系統之 所有幾何關係。由於本系統之等效齒比會不斷改變,因此偏心圓鏈輪旋轉角度與 橢圓大齒盤旋轉角度之對應關係也會隨之改變,需要推導出兩個鏈輪的旋轉角度 對應關係式,才能進行系統運轉時的幾何關係計算。將(2-32)式整理後可得:
E n R
ω = ω (2-33)
將(2-33)式等號左右兩邊同乘上偏心圓鏈輪單位旋轉角度 0.1 度角所花的時間,即 可得到偏心圓鏈輪單位旋轉角度Δ =θR 0.1度角與橢圓大齒盤旋轉角度之對應關 係:
Δ = Δ (2-34) θE n θR
21
其中,等效齒比n可藉由(2-32)式以幾何關係求得:
RP EP
n r
=r (2-35)
兩個鏈輪的旋轉角度對應關係如圖 2-12 所示。
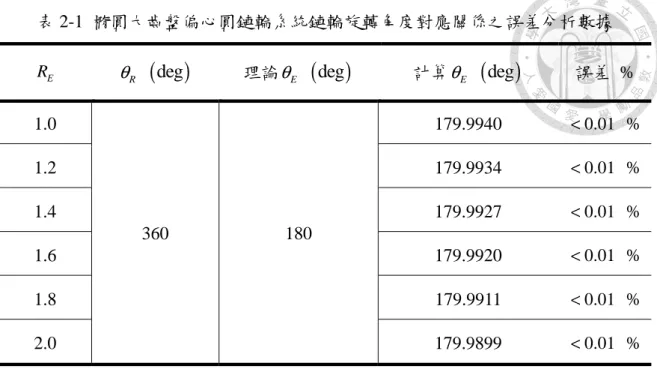
理論上,由於橢圓大齒盤與偏心圓鏈輪的齒數比為 2:1,當偏心圓鏈輪旋轉 一圈時(360 度),橢圓大齒盤應旋轉半圈(180 度)。不過,因本研究使用數值分析的 方法,以偏心圓鏈輪旋轉 0.1 度角為單位旋轉角度,所以會有些微誤差的存在。旋 轉角度對應關係之誤差分析結果如表 2-1 所示,從表中數據可得知,傳統圓形大齒 盤與長短軸比 1.2 至 2.0 之橢圓大齒盤偏心圓鏈輪系統,偏心圓鏈輪旋轉一圈後的 角度誤差百分比,皆在 0.01 %以下,因此可證明本研究發展之旋轉角度數值分析 法的誤差極小。
r
ETr
RTx y
θ
R EΔ
θ Δ
ω
Eω
Rr ′
ETr ′
RT圖 2-12 橢圓大齒盤偏心圓鏈輪系統旋轉角度示意圖
22
表 2-1 橢圓大齒盤偏心圓鏈輪系統鏈輪旋轉角度對應關係之誤差分析數據
RE θ R
( )
deg 理論θ E( )
deg 計算θ E( )
deg 誤差 %1.0
360 180
179.9940 <0.01 %
1.2 179.9934 <0.01 %
1.4 179.9927 <0.01 %
1.6 179.9920 <0.01 %
1.8 179.9911 <0.01 %
2.0 179.9899 <0.01 %
2-4 小結
本章先建立自行車橢圓大齒盤偏心圓鏈輪系統幾何數學模型,將無鬆弛狀態 的鏈條視為橢圓與偏心圓之公切線,並使用旋轉座標公式,解出在橢圓大齒盤和 偏心圓鏈輪同時旋轉的狀態下,公切線分別與橢圓和偏心圓的切點,即可推導出 此系統在旋轉狀態下之所有幾何關係式。再根據此系統之幾何關係,分別計算在 旋轉狀態下與橢圓大齒盤嚙合之鏈條長度、與偏心圓鏈輪嚙合之鏈條長度以及無 嚙合之鏈條長度,將以上這三段鏈條長度相加,即可求得此系統在各個旋轉角度 時的無鬆弛鏈條總長度。此外,也藉由幾何關係,定義此系統之等效齒比,以及 推導此系統運轉時的鏈輪旋轉角度關係式。
23
第三章 腿部模擬五連桿機構動力模型
3.
Equation Chapter (Next) Section 1
為了要進行腿部各關節的負荷分析,本研究以 Hull 和 Jorge[18]建立之成人腿 部模擬平面五連桿機構為基礎,稍作改良以配合第二章建立之橢圓大齒盤偏心圓 鏈輪系統模型,建立腿部模擬五連桿機構之動力模型。首先,利用向量迴路方程 式,建立五個桿件的向量方程式,並逐次對時間進行一次及二次微分,得到各桿 件之間的運動關係式。接著,再推導出腿部五連桿機構的動力平衡方程式,以得 知腿部各關節之驅動力矩變化,作為評估關節負荷與踩踏效率之指標。
為簡化運動分析模型,本章使用之假設如下:
1. 各接頭之間緊密接合,沒有間隙。
2. 所有桿件均為剛體,運動過程不會產生變形。
3-1 角度分析
本節針對腿部模擬平面五連桿各桿件之運動角度進行推導。腿部模擬五連桿 機構示意圖如圖 3-1 所示,自行車座管為桿 1,自行車曲柄為桿 2,腳板為桿 3,
小腿為桿 4,大腿為桿 5。由於此五連桿的接頭僅有旋轉對,因此此機構之自由度 計算公式如下:
( )
3 1 2
2
F= N− − j
= (3-1)
其中,各項參數分別如下所示:
F :機構自由度 N:桿件數目
j :旋轉對接頭數目
24
x
y
CG4
CG3
CG2
θ5
r
1θ4
r
5θ3
θ2
r
3r
2θ1
r
4CG5
圖 3-1 腿部模擬平面五連桿機構示意圖(單一腿部)
y
θ2
90° x
180°
270° 0°
圖 3-2 曲柄旋轉角度示意圖