國
立
交
通
大
學
電控工程研究所
碩
士
論
文
電網同步之鎖相迴路控制器的分析與設計
Grid Synchronization Phase Locked Loop Controller
Analysis and Design
研 究 生: 羊宣銘
指導教授: 林清安 教授
電網同步之鎖相迴路控制器的分析與設計
Grid Synchronization Phase Locked Loop Controller
Analysis and Design
研 究 生:羊宣銘 Student:Hsuan-Ming Yang
指導教授:林清安 Advisor:Prof. Ching-An Lin
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master In
Electrical and Control Engineering June 2013
Hsinchu, Taiwan, Republic of China
i
電網同步之鎖相迴路控制器的設計與分析
學生:羊宣銘 指導教授:林清安 教授 國立交通大學電控工程研究所 中文摘要 本論文主要探討電網上鎖相迴路中控制器的設計以及利用模擬比較電網發生故障 時各種控制器響應的結果。因為同步參考框鎖相迴路無法處理三相電壓不平衡的故障, 因此多重參考框鎖相迴路或雙通用積分器鎖相迴路等鎖相迴路被提出,這些鎖相迴路的 控制器大多是利用比例積分回授控制來實現,這種控制器在反應速度和高頻抑制都有出 色的表現,但因為零點的關係有最大超越量較大的問題。為改善此問題利用虛擬微分回 授控制、自適性調整之比例積分控制和 Q 參數化等方式來設計控制器,並且分析這些控 制方式的參數對線性化系統的暫態響應與高頻抑制能力的影響。在符合所需的規格要求 下,利用最小的單位步階誤差絕對值積分和誤差平方積分兩種指標作為模擬時參數的選 擇,在各種不同的電網故障條件時,如相位變化、雜訊干擾以及頻率變化,藉由誤差的 指標、總諧波干擾以及穩態誤差比較各個控制器在實際系統中之優點及缺點。ii
Grid Synchronization Phase Locked Loop Controller
Design and Analysis
Student: Hsuan-Ming Yang Advisor: Prof. Ching-An Lin
Institute of Electrical and Control Engineering National Chiao Tung University
Abstract
The thesis investigates grid synchronization phase locked loop (PLL) controllers design and compares the simulation results when grid fault occurs. Because synchronous reference frame PLL has poor phase-tracking performance when the voltage is unbalanced, others like multiple reference frame PLL and dual second order generalized integrator PLL are presented to overcome this drawback. These advanced PLLs controller also use the proportional integral (PI) controller. In general PI controllers can be designed to have fast response and effective attenuation of high order harmonics. The existence of a zero usually results in large overshoot in step response. This work presents pseudo-derivative feedback control, adaptive PI control and Q parameterization for better dynamic response, and the parameters are designed using the linear model with the minimum integral absolute error and integral square error in unit step response. Simulation results of these controllers under grid faults conditions are used to compare their performances.
iii
誌謝
在交通大學電控所修讀碩士班的時間裡,特別感謝指導教授 林清安教授教導我學 業以及實驗上的知識,在日常生活上也不吝與我分享處理事情的態度與經驗,使得研究 所的過程中學習到許多珍貴的知識與經驗,且在撰寫論文期間用心地校閱斧正,方能使 本論文得以順利完成。 感謝在研究所修習期間,父母對我生活與心靈上的支持與鼓勵,以及兄長分享自身 的經驗與知識,因為這些幫助讓我的研究生活得以順遂,正因為家人們的支持與鼓舞讓 而得以完成學業。 同時,感謝實驗室的同儕與學弟們,因為彼此間知識上的交流以及一同探討問題, 讓我的知識與經驗得以精進與成長。亦感謝大學的同學們,在研究所期間生活上與心靈 上的問題有你們的陪伴與幫忙,因為你們的協助與扶持使得這段時間內充滿了溫暖與動 力。iv
目錄
中文摘要 i 英文摘要 ii 誌謝 iii 目錄 iv 表目錄 vi 圖目錄 vii 一、緒論 1 二、鎖相迴路的介紹 3 2.1 電網上的故障分析 3 2.1.1 電網上常見的故障 3 2.1.2 三相電壓之座標轉換 6 2.2 同步參考框鎖相迴路 8 2.3 多重參考框鎖相迴路 12 2.4 雙通用積分器鎖相迴路 17 三、控制器設計與分析 23 3.1 雙通用積分器鎖相迴路利用比例積分回授控制之分析 23 3.1.1 比例積分回授控制之最大相位裕度設計 24 3.1.2 比例積分回授控制系統的暫態響應之分析 26 3.1.3 比例積分回授控制高頻雜訊抑制能力之分析 28 3.1.4 比例積分回授控制穩態誤差之分析 30 3.2 雙通用積分器鎖相迴路利用虛擬微分回授控制之分析 30 3.2.1 虛擬微分回授控制和比例積分回授控制的比較 31 3.2.2 虛擬微分回授控制穩定度之分析 35 3.2.3 虛擬微分回授控制暫態響應之分析 37v 3.2.4 虛擬微分回授控制高頻雜訊抑制能力之分析 39 3.2.5 虛擬微分回授控制穩態誤差之分析 41 3.3 自適性調整之比例積分回授控制 42 3.3.1 自適性調整的設計與穩定度之分析 43 3.3.2 自適性調整頻率之分析 45 3.4 Q 參數化設計高階之控制器 46 3.4.1 Q 參數化設計之假設 47 3.4.2 Q 參數化參數設計之分析 48 3.4.3 Q 參數化一維自由度之設計與分析 50 3.4.4 Q 參數化二維自由度之設計與分析 52 四、控制器之模擬與驗證 55 4.1 控制器參數設計 55 4.1.1 比例積分回授控制參數設計 55 4.1.2 虛擬微分回授控制參數設計 57 4.1.3 自適性調整之比例積分回授控制參數設計 59 4.1.4 一維自由度之 Q 參數化控制器參數設計 61 4.1.5 二維自由度之 Q 參數化控制器參數設計 64 4.2 鎖相迴路系統的模擬與驗證 66 4.2.1 相位步階變化之模擬結果 66 4.2.2 不平衡三相電壓與高頻雜訊之模擬結果 71 4.2.3 頻率步階變化之模擬結果 75 4.3 模擬結果總結 78 五、結論 79 參考資料 81 附錄 85
vi
表目錄
表 2.1:不同的三相電壓不平衡錯誤及其向量示意圖 4 表 3.1:Q 參數分母之係數 48 表 3.2:Q 參數分子之係數 48 表 4.1:比例積分回授控制之參數 57 表 4.2:虛擬微分回授控制之參數 59 表 4.3:自適性調整比例積分回授控制參數 61 表 4.4:一維自由度 Q 參數化設計之參數 63 表 4.5:二維自由度 Q 參數化設計之參數 66 表 4.6:相位變化對各個控制器的影響 71 表 4.7:不平衡故障與高頻雜訊對各個控制器的影響 75 表 4.8:頻率單位步階變化對於不同控制器之比較 78vii
圖目錄
圖 2.1:平衡及不平衡三相電壓向量示意圖 4 圖 2.2:同步參考框鎖相迴路之系統方塊圖 8 圖 2.3:同步參考框鎖相迴路線性化之系統方塊圖 9 圖 2.4:輸入之電壓波形與估測之正向序三相電壓波形 10 圖 2.5:平衡與不平衡狀態下估測之電壓及相位 10 圖 2.6:同步參考框鎖相迴路加上低通濾波器之系統方塊圖 10 圖 2.7:輸入之電壓波形和估測之正向序三相電壓波形 11 圖 2.8:有加低通濾波器和未加裝的估測電壓及相位之比較 12 圖 2.9:多重參考框鎖相之系統方塊圖 12 圖 2.10:多重參考框鎖相迴路等效之帶拒濾波器的波德圖 15 圖 2.11:多重參考框鎖相迴路線性化系統方塊圖 15 圖 2.12:多重參考框鎖相迴路線性化並簡化之系統方塊圖 16 圖 2.13:估測相之正向序三相電壓波形 16 圖 2.14:多重參考框鎖相迴路估測之電壓和相位 17 圖 2.15:基本的二階通用積分器之系統方塊圖 18 圖 2.16:改良過之二階通用積分器系統方塊圖 19 圖 2.17:改良過之二階通用積分器 D(s)之波德圖 20 圖 2.18:改良過之二階通用積分器 Q(s)之波德圖 20 圖 2.19:雙通用積分器鎖相迴路之系統方塊圖 20 圖 2.20:輸入之電壓和估測之正向序三相電壓波形 21 圖 2.21:雙通用積分器鎖相迴路估測之電壓和相位 22 圖 3.1:雙通用積分器鎖相迴路之線性化系統方塊圖 24 圖 3.2:參數𝑔和相位裕度之關係圖 26 圖 3.3:阻尼係數對穩定時間之影響 27viii 圖 3.4:阻尼係數對最大超越量之影響 28 圖 3.5:開路轉移函數和干擾的轉移函數之波德圖 29 圖 3.6:阻尼係數對高頻抑制能力和之影響 29 圖 3.7:比例積分回授控制簡單的一階系統 31 圖 3.8:虛擬微分回授控制簡單的一階系統 32 圖 3.9:阻尼係數對穩定時間及最大超越量之影響 33 圖 3.10:阻尼係數對 IAE 及 ISE 之影響 34 圖 3.11:阻尼係數對高頻抑制能力之影響 35 圖 3.12:利用 PDF 之雙通用積分器鎖相迴路系統方塊圖 36 圖 3.13:線性化之系統方塊圖 36 圖 3.14:固定𝑔和增益穿越頻率下之𝑎對穩定時間之影響 38 圖 3.15:固定𝑔和增益穿越頻率𝑎對最大超越量之影響 38 圖 3.16:固定增益穿越頻率不同的𝑔和𝑎對穩定時間的影響 39 圖 3.17:固定增益穿越頻率不同的𝑔和𝑎對最大超越量的影響 39 圖 3.18:參數𝑔和𝑎對系統高頻抑制能力之影響 40 圖 3.19:參數𝑔和𝑎對穩態誤差之影響 42 圖 3.20:自適性比例積分控制縣性化系統方塊圖 44 圖 3.21:自適性係數對穩定時間的影響 44 圖 3.22:自適性係數對穩定時間的影響 45 圖 3.23:調整頻率對 IAE 和 ISE 的影響 46 圖 3.24:𝑝1對於系統暫態之影響 51 圖 3.25:𝑝1對高頻抑制能力之影響 51 圖 3.26:𝑝1與𝑝2對系統暫態響應之影響 53 圖 3.27:𝑝1與𝑝2對高頻雜訊抑制之影響 53 圖 4.1:阻尼係數及增益穿越頻率對系統暫態和高頻抑制之影響 56
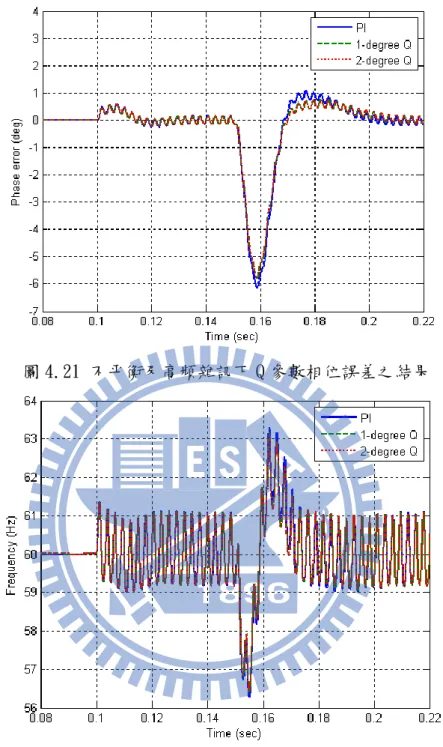
ix 圖 4.2:阻尼係數及增益穿越頻率對系統之 IAE 和 ISE 之影響 57 圖 4.3:增益穿越頻率和 a 值對系統暫態和高頻抑制的影響 58 圖 4.4:增益穿越頻率和 a 值對系統之 IAE 和 ISE 之影響 59 圖 4.5:自適性係數和增益穿越頻率對系統暫態之影響 60 圖 4.6:自適性係數和增益穿越頻率對系統暫態之影響 61 圖 4.7:Q 參數化設計𝑝1對單位步階的暫態及高頻抑制的影響 62 圖 4.8:Q 參數化設計𝑝1對單位步階的 IAE 及 ISE 之影響 63 圖 4.9:Q 參數化𝑝1與𝑝2對系統暫態和高頻抑制之影響 64 圖 4.10:Q 參數化𝑝1與𝑝2對於系統單位步階 IAE 和 ISE 的影響 65 圖 4.11:0.15 秒發生相位落後之三相電壓 67 圖 4.12:一弳度位變化下系統估測相位模擬結果 67 圖 4.13:一弳度位變化下系統相位誤差的結果 68 圖 4.14:一弳度相位變化下系統估測頻率的結果 68 圖 4.15:一弳度相位變化下系統估測頻率的結果 69 圖 4.16:一弳度相位變化下系統相位誤差的結果 69 圖 4.17:一弳度相位變化下系統估測頻率的結果 70 圖 4.18:不平衡且參有雜訊的三相電壓 72 圖 4.19:不平衡及高頻雜訊下不同控制器的相位誤差結果 73 圖 4.20:不平衡及高頻雜訊下不同控制器的估測頻率之結果 73 圖 4.21:不平衡及高頻雜訊下 Q 參數相位之誤差結果 74 圖 4.22:不平衡及高頻雜訊下 Q 參數估測頻率之結果 74 圖 4.23:三相平衡電壓於 0.1 秒時頻率上升 1 Hz 之波形 75 圖 4.24:頻率步階變化對不同控制器相位誤差的影響 76 圖 4.25:頻率步階變化對不同控制系統估測頻率的影響 76 圖 4.26:頻率步階變化對 Q 參數化系統相位誤差的影響 77
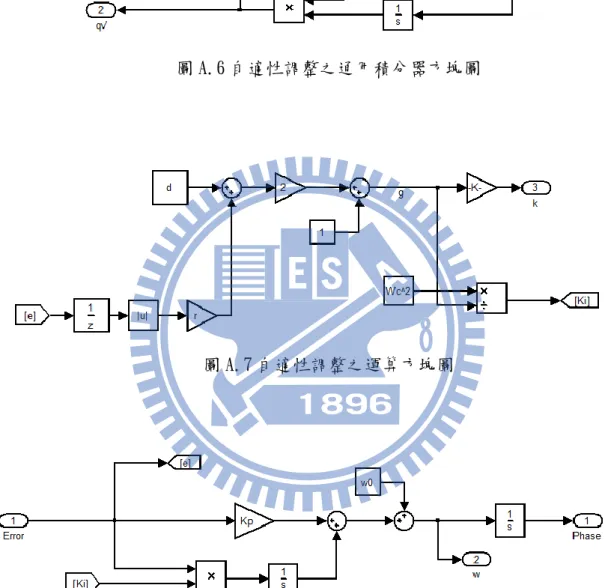
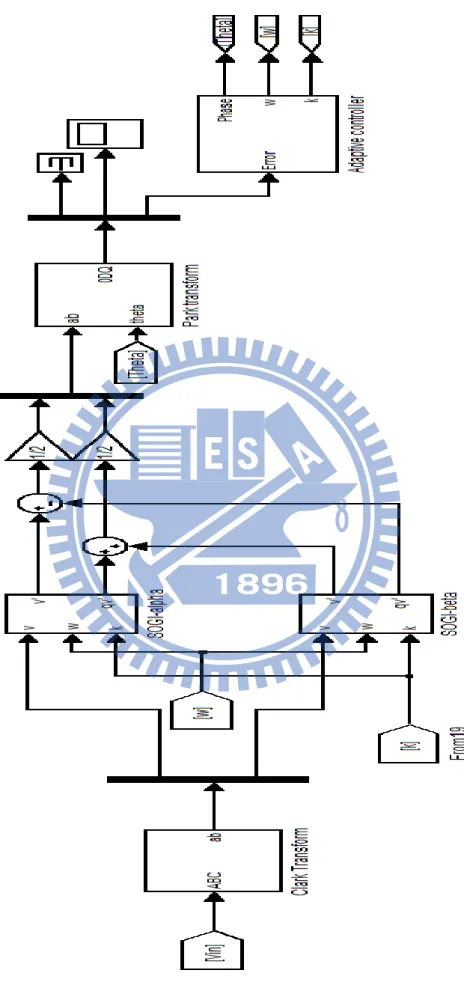
x 圖 4.27:頻率步階變化對 Q 參數化系統估測頻率的影響 77 圖 A.1:通用積分器之方塊圖 85 圖 A.2:雙通用積分器鎖相迴路之結構圖 86 圖 A.3:比例積分控制器之方塊圖 87 圖 A.4:虛擬微分回授控制器之方塊圖 87 圖 A.5:Q 參數設計控制之方塊圖 87 圖 A.6:自適性調整之通用積分器方塊圖 88 圖 A.7:自適性調整之運算方塊圖 88 圖 A.8:自適性調整之控制器方塊圖 88 圖 A.9:自適性調整之雙通用積分器鎖相迴路系統結構圖 89
1
一、緒論
近年來因能源的缺乏以及石化燃料等發電原料價格的上揚,綠色能源等相關設備因 而蓬勃發展,但這類新興能源容易受到環境的因素而影響系統的效能,電網比起以往需 要更精確和穩定的控制技術和方法,歸功於現今數位晶片運算的進步及先進的積體電路 製程使得現今足以將許多新穎的控制方法和技術得以實現。這類新興的綠色能源和電網 相互連接的網路中有利用絕緣柵雙極電晶體(insulated gate bipolar transistor, IGBT) 等電子元件所製成的換相器(converter),讓這類發電設備在惡劣的條件下運作時不會因 而拖垮或損害整個電網系統。換相器在切換開關的控制策略中需要電網上的電壓、電流、 轉子轉速以及相位等資料做為操作行為的判斷,其中又因為電網上電壓以及電流皆為交 流的訊號,分析上會利用克拉克轉換(Clark transform)及帕克轉換(Park transform)等座 標轉換矩陣將交流訊號得以簡化利於控制,因此電網端的相位和頻率在電網的控制中又 顯得格外重要。鎖相迴路的技術最早是大量地使用在積體電路設計之中,由於這類裝置可以有效地 追蹤週期性訊號之相位和頻率的能力,如今這類的裝置也廣泛的使用在許多訊號控制的 系統中。鎖相迴路結構主要可以分為三個部分,分別為相位偵測器(phase detector, PD)、 迴路濾波器(loop filter, LF)以及電壓控制震盪器(voltage control oscillator, VCO)。 鎖相迴路的作用方式是由相位偵測器得到相位誤差的訊號,經過迴路濾波器去除高頻雜 訊的干擾,再利用電壓控制震盪器產生系統估測之相位。鎖相迴路主要的功用在於正確 估測輸入訊號之相位,一個良好的鎖相迴路系統處於穩態下時應當讓估測之相位和輸入 訊號之相位間的誤差必須為零或定值。在現今先進的電網控制中因為控制上的需要,追 蹤電網上交流電的頻率和相角是個非常重要的課題,因此需要鎖相迴路的裝置來穩定地 估測電網上的相位和頻率。 在電網上的鎖相迴路之中最簡單的架構是同步參考框鎖相迴路(synchronous
confere- nce frame phase lock loop, SRFPLL),這種鎖相迴路的設計十分簡單是利用帕克 轉換後的相位誤差訊號經過比例積分控制器(proportional integral controller)便可得到估
2 測之頻率,再利用一個積分器則可得到估測的相位。同步參考框鎖相迴路在三相平衡時 是個很簡單且非常有效的鎖相迴路,可以準確及快速地得到電網的頻率和相位,但實際 電網端上的電壓訊號並不是一個理想的弦波訊號,由於在電力網路中故障的發生是無可 避免的,其中又以三相電壓不平衡是所有故障中發生的機率最高,造成故障的原因是高 壓電線發生短路接地或著是電線間短路相接。因電壓發生三相不平衡故障時同步參考框 鎖相迴路估測之相位將受到干擾而無法在控制中使用,近年來有許多不同形式的鎖相迴 路相繼被提出都是為了解決當電網上發生故障的狀況下效地估測系統的相位。 為了在電壓發生不平衡故障的狀況下,讓系統估測的相位和頻率足夠準確,許多新 型的鎖相迴路架構相繼被提出,其中有許多方式是改善同步參考框鎖相迴路的缺點,利 用特殊的濾波方式讓系統可以得到正確的正向序的基頻訊號,使得同步參考框鎖相迴路 在電壓不平衡的條件下也可以準確的預估相位和頻率,如[1]-[4]。另一類的方式主要 是利用瞬時對稱分量理論(instantaneous symmetrical component theory)做為基礎,利用正 交訊號產生器(quadrature signal generator)所產生的正交訊號和原訊號做運算因而得到 正向序的訊號,如[5]-[10]等方法,亦或著是利用延遲訊號消去法(delayed signal cancellation method)後再運用瞬時對稱分量理論的方式如[11][12]。另外還有一類是利 用數位濾波器的方式得到正向序的訊號,例如利用帶拒濾波器濾除不需要的諧波訊號, 如[13]和[14],或是利用複數係數濾波器(complex-coefficient filter)的方式[15],這種濾 波器的特性是可以對於頻率和向序有很好的選擇性。 有不少文獻在比較以上先進的鎖相迴路間的效能差異[16]-[19],但鎖相迴路不是 僅利用相位偵測元件就達到估測相位的用途,控制器也是扮演很重要的角色。雖然常用 的比例積分控制有許多優點,如結構簡單、響應快速、穩態誤差的效果也很好且參數設 計也有許多的經驗和技巧,但是此種控制方式依舊存在著缺點,例如因為零點的關係使 得暫態響應無法消除最大超越量的問題。本論文主要探討鎖相迴路的控制器是否有其餘 控制方法可以運用,當系統處於電網的三相電壓發生各種故障時,在雙通用積分器鎖相 迴路的結構下比較比例積分回授控制和其餘所提出之控制器效果的差異。
3
二、鎖相迴路的介紹
近來電網控制之研究的發展十分蓬勃,其中鎖相迴路的設計必須有能力排除各種因 電網端上的故障所造成之影響,因此已經有許多文獻提出了不同的方法以及比較各個鎖 相迴路的差異。本章僅介紹其中的三種鎖相迴路,除了最單純的同步參考框鎖相迴路外, 另外兩種鎖相迴路分別為多重參考框鎖相迴路以及雙通用積分器鎖相迴路,除了介紹其 作用原理外也分析這些鎖相迴路線性化後的特色和效果的比較。2.1 電網上的故障分析
電力網路是個龐大而且複雜的系統,電網端上有許多大型發電機或馬達等裝置相聯, 一旦某處發生了故障將影響系統的平衡,嚴重時甚至會讓整個系統崩潰。當某處發生故 障時電網必須有能力偵測並且做出判斷,因此電網上利用換相器或繼電器等元件做為控 制、監控以及保護電網的裝置。因為電網上的電壓訊號是利用交流電作為電力傳輸的方 式,從控制上的觀點這種非線性而且隨時間變動的弦波訊號難以分析與運用,常見的方 法是使用座標轉換的方式將訊號簡化,利於各種控制裝置有能力從故障中分析出正確的 資訊來做出判斷。2.1.1 電網上常見的故障
電網上三相電壓在理想的情況下可視為三個各相差 120 度,有相同頻率及震幅的弦 波訊號。但實際電網不可能永遠處於理想的狀態,因為整個電網有許多大型機具如發電 機等與之相聯,電力的供應除了必須滿足整個電網所需之實功功率外,也因為存在許多 電容和電感使得虛功的要求必須被滿足,當電網上虛功的供應不足時,會造成電網無法 順利支持實功的傳輸,整個電網將會發生電壓崩潰的嚴重故障,因此電網必須具備虛功 控制的能力。 除了因為虛功不足而造成的電壓崩潰外,另外一種常見的故障是三相電壓的不平衡 故障,這種故障主要因為電網的輸電線發生了單相接地或雙相短路,這種故障會造成單4 相或多相的電壓發生驟降的現象。當發生電壓驟降時三相電壓將不在是三個彼此平衡的 相量,分析上常將因故障而造成不平衡的三相電壓視為正向序及負向序兩種不同的向量 之合成,如圖 2.1 表示,其中正向序和負向序是兩組頻率大小相同可是震幅、相位和旋 轉方向皆不相同的向量組,向量合成的結果會造成三相電壓的振幅以及相位不再相同, 造成電網的控制上會發生問題。表 2.1 中表示著一些常見故障的範例以及三相電壓向量 的分布情況,其中 E 為初始平衡電壓振幅,V 為故障發生後的電壓振幅。 圖 2.1 平衡及不平衡三相電壓向量示意圖 表 2.1 不同的三相電壓不平衡錯誤及其向量示意圖 故障類別 向量 向量圖 故障原因 Type A 𝑉𝑎= 𝑉 𝑉𝑏= −1 2𝑉 − 𝑗 √3 2 𝑉 𝑉𝑐 = −1 2𝑉 + 𝑗 √3 2 𝑉 三相短路
5 Type B 𝑉𝑎= 𝑉 𝑉𝑏= −1 2𝐸 − 𝑗 √3 2 𝐸 𝑉𝑐 = −1 2𝐸 + 𝑗 √3 2 𝐸 單相對線地短 路 Type C 𝑉𝑎 = 𝐸 𝑉𝑏= −1 2𝐸 − 𝑗 √3 2 𝑉 𝑉𝑐 = −1 2𝐸 + 𝑗 √3 2 𝑉 單相線對地短 路 線對線短路 Type D 𝑉𝑎= 𝑉 𝑉𝑏= − 1 2𝑉 − 𝑗 √3 2 𝐸 𝑉𝑐 = − 1 2𝑉 + 𝑗 √3 2 𝐸 單相線對地短 路 線對線短路 Type E 𝑉𝑎 = 𝐸 𝑉𝑏= − 1 2𝑉 − 𝑗 √3 2 𝐸 𝑉𝑐 = − 1 2𝑉 + 𝑗 √3 2 𝐸 單相線對地短 路 線對線短路 Type F 𝑉𝑎= 𝑉 𝑉𝑏= −1 2𝑉 − 𝑗( √3 6 𝑉 + √3 3 𝐸) 𝑉𝑐 = −1 2𝑉 + 𝑗( √3 6 𝑉 + √3 3 𝐸) 雙相線對地短 路 Type G 𝑉 𝑎 = 2 3𝐸 + 1 3𝑉 𝑉𝑏= −1 3𝐸 − 1 6𝑉 − 𝑗 √3 6 𝑉 𝑉𝑐 = −1 3𝐸 − 1 6𝑉 + 𝑗 √3 2 𝑉 雙相線對地短 路
6 影響電網上電壓訊號除了因故障產生的問題外也有著許多的高頻諧波,不過因為與 電網相接時大多利用全橋式整流器等元件,使得雜訊為非兩倍和三倍基頻倍數的諧波, 例如 5 倍、7 倍、11 倍等[20],若將電網上這些可能發生的狀況皆納入考量之中,在不 失任何可能的情況下之三相電壓如(2.1)式所表示,其中𝑉𝑛+(𝑉𝑛−)和𝜙𝑛+(𝜙𝑛−)為第 n 倍 頻率的振幅和相角,右上符號則代表的是電壓的向序。 [ 𝑣𝑎(𝑡) 𝑣𝑏(𝑡) 𝑣𝑐(𝑡) ] = [ ∑[𝑉𝑛+cos(𝑛𝜔𝑡 + 𝜙𝑛+) + 𝑉𝑛−cos(𝑛𝜔𝑡 + 𝜙𝑛−)] ∞ 𝑛=1 ∑ [𝑉𝑛+cos (𝑛𝜔𝑡 + 𝜙𝑛+− 2 3𝜋) + 𝑉𝑛 −cos (𝑛𝜔𝑡 + 𝜙 𝑛−+ 2 3𝜋)] ∞ 𝑛=1 ∑ [𝑉𝑛+cos (𝑛𝜔𝑡 + 𝜙𝑛++2 3𝜋) + 𝑉𝑛−cos(𝑛𝜔𝑡 + 𝜙𝑛−) − 2 3𝜋] ∞ 𝑛=1 ] (2.1)
2.1.2 三相電壓之座標轉換
由於電網電壓是一個三維的向量並且大小為隨時間變化的弦波函數,要直接用在分 析和控制上是一個複雜而且困難的函數,為了簡化一般利用克拉克轉換將三維的向量轉 化為二維且彼此正交的向量如(2.2)。 [𝑣𝑣𝛼(𝑡) 𝛽(𝑡)] = [𝑇𝛼𝛽] [ 𝑣𝑎(𝑡) 𝑣𝑏(𝑡) 𝑣𝑐(𝑡) ] = [𝑣𝛼 +(𝑡) 𝑣𝛽+(𝑡)] + [ 𝑣𝛼−(𝑡) 𝑣𝛽−(𝑡)] (2.2) [𝑇𝛼𝛽] =2 3 [ 1 −1 2 − 1 2 0 √3 2 − √3 2 ] (2.3) [𝑣𝛼 +(𝑡) 𝑣𝛽+(𝑡)] = [ ∑ 𝑉𝑛+cos(𝑛𝜔𝑡 + 𝜙 𝑛+) ∞ 𝑛=1 ∑ 𝑉𝑛+sin(𝑛𝜔𝑡 + 𝜙𝑛+) ∞ 𝑛=1 ] (2.4)7 [𝑣𝑣𝛼−(𝑡) 𝛽−(𝑡)] = [ ∑ 𝑉𝑛−cos(𝑛𝜔𝑡 + 𝜙 𝑛−) ∞ 𝑛=1 − ∑ 𝑉𝑛−sin(𝑛𝜔𝑡 + 𝜙 𝑛−) ∞ 𝑛=1 ] (2.5) 經由方程式(2.2)所得到的訊號比起原始的三相電壓少了一個維度的向量,但大小 依然為隨時間變化的弦波函數,在分析和控制上依舊存在不少的困難,所以再藉由帕克 轉換,這是一種旋轉座標框的方法,希望將正交向量更進一步簡化為: [𝑣𝑣𝑑(𝑡) 𝑞(𝑡)] = [𝑇𝑑𝑞] [ 𝑣𝛼(𝑡) 𝑣𝛽(𝑡)] = [ 𝑣𝑑+(𝑡) 𝑣𝑞+(𝑡)] + [ 𝑣𝑑−(𝑡) 𝑣𝑞−(𝑡)] (2.6) [𝑇𝑑𝑞] = [ cos(θ̃) sin(θ̃) − sin(θ̃) cos(θ̃)] , 𝜃̃ = 𝜔̃ + 𝜙̃1 + (2.7) [𝑣𝑣𝑑+(𝑡) 𝑞+(𝑡)] = [ ∑ 𝑉𝑛+cos[(𝑛𝜔 − 𝜔̃)𝑡 + (𝜙 𝑛+− 𝜙̃1+)] ∞ 𝑛=1 ∑ 𝑉𝑛+sin[(𝑛𝜔 − 𝜔̃)𝑡 + (𝜙𝑛+− 𝜙̃1+)] ∞ 𝑛=1 ] (2.8) [𝑣𝑣𝑑−(𝑡) 𝑞−(𝑡)] = [ ∑ 𝑉𝑛−cos[(𝑛𝜔 + 𝜔̃)𝑡 + (𝜙 𝑛−+ 𝜙̃1+)] ∞ 𝑛=1 − ∑ 𝑉𝑛−sin[(𝑛𝜔 + 𝜔̃)𝑡 + (𝜙𝑛−+ 𝜙̃1+)] ∞ 𝑛=1 ] (2.9) 其中𝜃̃、𝜔̃、𝜙̃分別為估測的相角、角速度及相位。由式(2.7)和式(2.8)可以發現當角速 度鎖定時,即𝜔̃ = 𝜔 ,則n = 1的正向序弦波函數會變為常數而其餘函數的頻率則是有 所改變,可以表示為 [𝑣𝑣𝑑(𝑡) 𝑞(𝑡)] = [ 𝑣̅𝑑 𝑣̅𝑞] + [ 𝑣𝑑,ℎ(𝑡) 𝑣𝑞,ℎ(𝑡)] (2.10) 其中 {𝑣̅𝑑 = 𝑉1 +cos(𝜙 1+− 𝜙̃1+) 𝑣̅𝑞 = 𝑉1+sin(𝜙1+ − 𝜙̃1+) 若系統是處於相位接近鎖定的條件下時,即𝜔̃ = 𝜔且, 𝜙̃1+ ≅ 𝜙 1+,則基頻的訊號近似為: {𝑣̅𝑑 = 𝑉1 +cos(𝜙 1+ − 𝜙̃1+) ≅ 𝑉1+ 𝑣̅𝑞 = 𝑉1+sin(𝜙 1+− 𝜙̃1+) ≅ 𝑉1+(𝜙1+− 𝜙̃1+) (2.11) 由(2.11)的關係可以得知,藉由低通濾波器抑制高頻的諧波訊號便可以將此轉換後的非
8 時變訊號做為控制的輸入訊號,利用簡單的控制器便可以設計出對於相位有追蹤與鎖定 效果的鎖相迴路,其中 d 軸分量可以做為預估基頻正向序的震幅大小,而 q 軸的分量則 用來估測基頻的正向序的相位。
2.2 同步參考框鎖相迴路
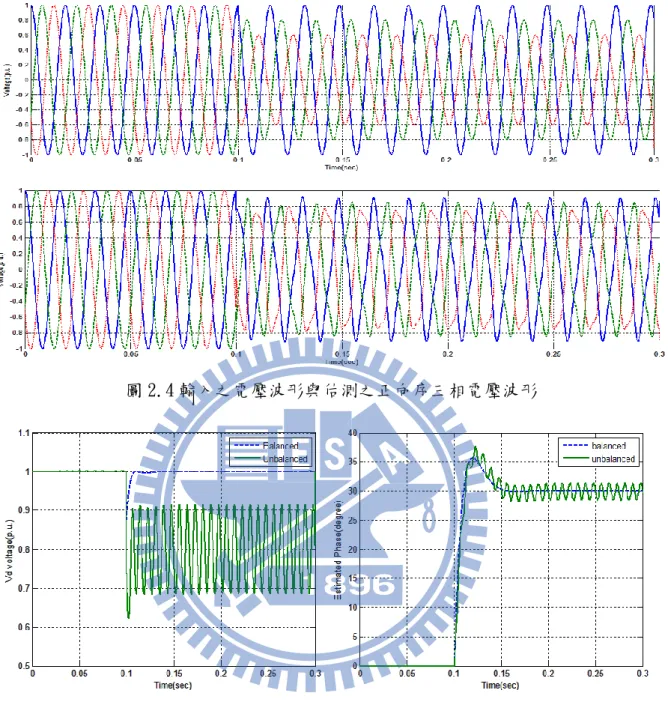
電網上許多種類的鎖相迴路中,同步參考框鎖相迴路是一種很基本且簡單的架構, 此種鎖相迴路的優點是結構十分簡單並且設計容易,僅應用前一小節中所提到的座標轉 換矩陣和比例積分控制器便可以在實際應用於電網的鎖相迴路系統。當三相電壓經過克 拉克及派克轉換後得到的 q 軸訊號做為比例積分控制器的訊號輸入再利用一個積分器便 得到估測之相位,並且將相位回授給派克轉換而形成一個閉迴路的結構,其系統的方塊 圖如圖 2.2 所示,圖中𝜃̃為系統預估之相角,為了令鎖相迴路的反應速度加快一般估測 之角速度會額外加上了電網上的基頻頻率𝜔𝑜,常用的基頻頻率大多為 60 Hz 或 50 Hz。 圖 2.2 同步參考框鎖相迴路之系統方塊圖 當同步參考框鎖相迴路在相位接近鎖定的條件下,整個鎖相迴路系統在線性化以及 電壓經過標么化後,得到之估測相位𝜙̃1+和實際相位𝜙 1+的系統方塊圖關係如圖 2.3,在 沒有高頻雜訊輸入的條件下輸入和輸出的閉迴路轉移函數為: ϕ̃1+(s) ϕ1+(s)= 𝐾𝑝𝑠 + 𝐾𝐼 𝑠2+ 𝐾 𝑝𝑠 + 𝐾𝐼 (2.12)9 圖 2.3 同步參考框鎖相迴路線性化之系統方塊圖 由(2.12)可以得知此系統為一個二階的系統,其分子因為比例積分控制器的關係而 存在一個零點,系統的設計上十分簡單藉由調整比例積分控制器的參數來達到所需之系 統規格的要求,同步參考框鎖相迴路在相位變化時將擁有不錯的暫態響應,而且對於高 頻雜訊也有些許的抑制能力,另外系統的開路轉移函數有兩個在原點的極點因此為型態 二之系統,對於相位步階和頻率步階的穩態誤差皆為零。以上特性對於鎖相迴路都是很 好的特性,只可惜同步參考框鎖相迴路在電壓發生三相不平衡故障時其所估測之相位因 為受到故障的影響而使得預估之相位會有嚴重的震盪行為,造成所估測相位的效果變差 無法在其控制的系統上使用。圖 2.4 上圖為初始相位為零的平衡三相電壓在 0.1 秒時發 生了不平衡之故障(𝑉𝑎 = 1(𝑝. 𝑢. ), 𝑉𝑏= 0.8(𝑝. 𝑢. ), 𝑉𝑐 = 0.6(𝑝. 𝑢. ))並且同時各相的相位發 生了 30 度的落後之三相電壓波型(藍線為 a 相,綠線為 b 相,紅線為 c 相)。圖 2.4 下 圖為利用系統所估測的相位還原之正向序三相電壓,圖中因為電壓發生不平衡的故障使 得系統估測到的相位並不理想而無法還原得到正確的正向序的平衡三相電壓。圖 2.5 分 別為在三相處於平衡的條件下和不平衡的狀況發生時同步參考框鎖相迴路的 d 軸分量及 預估相位的響應圖,由這兩張圖可以很明顯的看出在不平衡的條件下此種方法效果十分 的不好,不論在估測相角還是估測振幅上都因三相不平衡的影響產生震盪的雜訊。
10
圖 2.4 輸入之電壓波形與估測之正向序三相電壓波形
圖 2.5 平衡與不平衡狀態下估測之電壓及相位
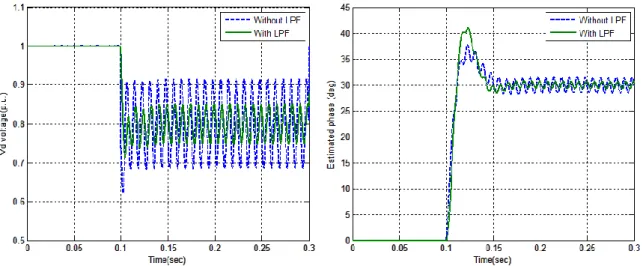
11 為解決同步參考框鎖相迴路無法處理不平衡故障的情況,加上低通率波器可以抑制 因帕克轉換後成為兩倍基頻的負向序訊號其系統方塊圖如圖 2.6 表示。圖 2.7 和圖 2.8 的圖形分別表示為在一樣的不平衡三相電壓輸入下加裝低通濾波器之同步參考框鎖相 迴路的模擬結果,圖 2.7 上圖為原始的三相電壓訊號而下圖為加裝低通濾波器後預估的 正向序之三相電壓,圖 2.8 則是未加低通濾波器和額外加上低通濾波器兩者對於估測相 位和估測震幅的結果。比較下可以發現當同步參考框鎖相迴路額外加上低通濾波器在處 於電壓不平衡的條件下其相位追蹤的結果有改善的情形,但其結果依然存在著震盪的現 象,若欲使濾波的效果更明顯必須將濾波器的截止頻率降低,但如此會嚴重增加響應時 間。針對因為電壓的不平衡故障造成鎖相迴路的問題,有許多其他的鎖相迴路方法被提 出,比起同步參考框鎖相迴路為解決在電壓不平衡狀況額外加上低通濾波器方法,其餘 被提出的鎖相迴路的設計中不會有為消除不平衡故障的影響而造成低通濾波器額外拖 累鎖相迴路的反應速度的問題,而且這類新穎的鎖相迴路是能夠完全消除因為電壓不平 衡的故障造成的估測相位震盪之影響。 圖 2.7 輸入之電壓波形和估測之正向序三相電壓波形
12
圖 2.8 有加低通濾波器和未加裝的估測電壓及相位之比較
2.3 多重參考框鎖相迴路
圖 2.9 表示著多重參考框鎖相迴路(Multiple Reference Frame PLL,MRF-PLL)的結 構 [4] , 此 種 方 法 和 解 聯 式 雙 同 步 參 考 框 鎖 相 迴 路 (Decouple Double Synchronous Reference Frame PLL,DDSRF-PLL)[1]、[2]有類似的構想,兩者之間只是結構不同但多 重參考框鎖相迴路的結構比較直觀。這一種類型的鎖相迴路主要設計目的是讓電壓訊號 經過兩個相同但是旋轉方向相反的同步框後經過低通濾波器過濾因轉換後產生的兩倍 頻率的諧波訊號分別得到估測出的正向序和負向序之電壓訊號,再將估測的兩種訊號回 授相減而消去對於彼此的影響,因而得到解聯後的正向序以及負向序之分量,最後利用 解聯後正向序的分量訊號經過比例積分控制器得到估測的相位。 圖 2.9 多重參考框鎖相之系統方塊圖
13 由圖 2.9 可以得到估測的正向序和負向序與輸入訊號的關係為: [𝑣̃𝛼,1 + (t) 𝑣̃𝛽,1+ (t)] = [𝑇𝑑𝑞]𝑇{[𝐿𝑃𝐹(𝑡)0 𝐿𝑃𝐹(𝑡)0 ] ∗ {[𝑇𝑑𝑞] {[𝑣𝑣𝛼(𝑡) 𝛽(𝑡)] − [ 𝑣̃𝛼,1− (t) 𝑣̃𝛽,1− (t)]}}} (2.14) [𝑣̃𝛼,1 − (t) 𝑣̃𝛽,1− (t)] = [𝑇𝑑𝑞] {[𝐿𝑃𝐹(𝑡)0 𝐿𝑃𝐹(𝑡)0 ] ∗ {[𝑇𝑑𝑞]𝑇{[𝑣𝑣𝛼(𝑡) 𝛽(𝑡)] − [ 𝑣̃𝛼,1+ (t) 𝑣̃𝛽,1+ (t)]}}} (2.15) 其中方程式(2.14)和(2.15)中的低通濾波器的轉移函數為 LPF(s) = 𝜔𝑝 𝑠 + 𝜔𝑝 (2.16) 並且將式(2.14)和(2.15)的帕克轉換中之三角函數利用尤拉公式展開得到: [𝑇𝑑𝑞] = [ cos(θ̃) sin(θ̃) − sin(θ̃) cos(θ̃)] , 𝜃̃ = 𝜔̃ + 𝜙̃1 + =1 2[ 𝑒𝑗𝜃̃ + 𝑒−𝑗𝜃̃ −𝑗𝑒𝑗𝜃̃ + 𝑗𝑒−𝑗𝜃̃ 𝑗𝑒𝑗𝜃̃ − 𝑗𝑒−𝑗𝜃̃ 𝑒𝑗𝜃̃ + 𝑒−𝑗𝜃̃ ] (2.17) 式(2.17)代入式(2.14)和(2.15)並經過拉普拉斯轉換後為 [𝑣̃𝛼,1 + (s) 𝑣̃𝛽,1+ (s)] = [𝑗𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) − 𝑗𝐿𝑃𝐹(𝑠 − 𝑗𝜔𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) + 𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃)̃) −𝑗𝐿𝑃𝐹(𝑠 + 𝑗𝜔𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) + 𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃) + 𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃)̃)] × {[𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1− (s) 𝑣̃𝛽,1− (s)]} (2.18) [𝑣̃𝛼,1 − (s) 𝑣̃𝛽,1− (s)] = [−𝑗𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) + 𝑗𝐿𝑃𝐹(𝑠 − 𝑗𝜔𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) + 𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃)̃) 𝑗𝐿𝑃𝐹(𝑠 + 𝑗𝜔𝐿𝑃𝐹(𝑠 + 𝑗𝜔̃) − 𝑗𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃) + 𝐿𝑃𝐹(𝑠 − 𝑗𝜔̃)̃)] × {[𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1+ (s) 𝑣̃𝛽,1+ (s)]} (2.19) 方程式(2.18)和(2.19)展開並整理後為 [𝑣̃𝛼,1 + (s) 𝑣̃𝛽,1+ (s)] = [ 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝)2+ 𝜔̃2 − 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝)2+ 𝜔̃2 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝) 2 + 𝜔̃2 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝) 2 + 𝜔̃2 ] {[𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1− (s) 𝑣̃𝛽,1− (s)]} (2.20) [𝑣̃𝛼,1 − (s) 𝑣̃𝛽,1− (s)] = [ 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝)2+ 𝜔̃2 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝)2+ 𝜔̃2 − 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝)2+ 𝜔̃2 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝)2+ 𝜔̃2] {[𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1+ (s) 𝑣̃𝛽,1+ (s)]} (2.21)
14 將(2.21)代入(2.20)可得到αβ軸上的正向序和輸入訊號的關係矩陣為 [𝑣̃𝛼,1 + (s) 𝑣̃𝛽,1+ (s)] = [ 𝜔𝑝𝑠 𝑠2 + 2𝜔 𝑝𝑠 + 𝜔̃2 − 𝜔̃𝜔𝑝 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2 𝜔̃𝜔𝑝 𝑠2 + 2𝜔 𝑝𝑠 + 𝜔̃2 𝜔𝑝𝑠 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2 ] [𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] (2.22) 多重參考框鎖相迴路中正向序和負向序相減的運算方式,事實上可以視為一個帶拒濾波 器的效果,因原本不平衡的電壓中經由帕克轉換而造成的兩倍基頻弦波訊號會被所推估 之正向序和負向序的訊號相減而消去,其推導證明如下,以正向序為例將方程式(2.20) 改寫後可以得到 [𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1− (s) 𝑣̃𝛽,1− (s)] = {[ 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝)2 + 𝜔̃2 − 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝)2+ 𝜔̃2 𝜔̃𝜔𝑝 (𝑠 + 𝜔𝑝) 2 + 𝜔̃2 𝜔𝑝(𝑠 + 𝜔𝑝) (𝑠 + 𝜔𝑝) 2 + 𝜔̃2 ]} −1 [𝑣̃𝛼,1 + (s) 𝑣̃𝛽,1+ (s)] = 1 𝜔𝑝[ 𝑠 + 𝜔𝑝 𝜔̃ −𝜔̃ 𝑠 + 𝜔𝑝] [ 𝑣̃𝛼,1+ (s) 𝑣̃𝛽,1+ (s)] (2.23) 將式(2.22)代入(2.23)中可以得到 [𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] − [ 𝑣̃𝛼,1− (s) 𝑣̃𝛽,1− (s)] = [ 𝑠2+ 𝜔 𝑝𝑠 + 𝜔̃2 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2 −𝜔̃𝜔𝑝 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2 𝜔̃𝜔𝑝 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2 𝑠2+ 𝜔 𝑝𝑠 + 𝜔̃2 𝑠2+ 2𝜔 𝑝𝑠 + 𝜔̃2] [𝑣𝑣𝛼(𝑠) 𝛽(𝑠)] (2.24) 且𝑣𝛼和𝑣𝛽在穩定狀態下時兩者有相差九十度的相位的關係即: 𝑣𝛽(𝑗𝜔) = −𝑗𝑣𝛼(𝑗𝜔) (2.25) 則將s = 𝑗𝜔及(2.25)代入(2.24)可以得到其關係式 [𝑣𝑣𝛼(𝑗𝜔) 𝛽(𝑗𝜔)] − [ 𝑣̃𝛼,1− (𝑗𝜔) 𝑣̃𝛽,1− (𝑗𝜔)] = 𝜔̃2− 𝜔2+ 𝑗𝜔 𝑝(𝜔 + 𝜔̃) 𝜔̃2− 𝜔2 + 2𝑗𝜔 𝑝𝜔 [ 𝑣𝛼(𝑗𝜔) 𝑣𝛽(𝑗𝜔)] (2.26) 圖 2.10 所繪為低通濾波器的截止頻率為 30 Hz 時,方程式(2.26)其轉移函數的增益 和相位對於頻率之關係圖。由圖可以得知這樣的結構對正向序的向量是一個截止頻率發 生在負基頻頻率的帶拒濾波器,完全消除掉負向序向量的分量,在正向序之頻率時系統 的增益為一,因此輸出之訊號完整地保留正向序向量的分量。
15 圖 2.10 多重參考框鎖相迴路等效之帶拒濾波器的波德圖 當多重參考框鎖相迴路在處相位接近鎖定的條件下,經過線性化後其系統方塊圖可 以簡化為如圖 2.11 所示 圖 2.11 多重參考框鎖相迴路線性化系統方塊圖 一般情況下低通濾波器的截止頻率會低於等效之帶拒濾波器的兩倍基頻頻率之截止頻 帶,所以在暫態分析上通常忽略帶拒濾波器造成的影響,並且將高頻諧波中兩倍頻率之 諧波除去以簡化分析,在相位接近鎖定的條件下線性化後的系統方塊圖可以再簡化,如 圖 2.12 所示。在沒有高頻雜訊輸入時,其輸出之估測相位和輸入之實際相位的開迴路 與閉迴路轉移函數分別為 𝐺(𝑠) =𝜔𝑝(𝐾𝑝𝑠 + 𝐾𝐼) 𝑠2(𝑠 + 𝜔 𝑝) (2.27) ϕ̃1+(s) ϕ1+(s)= 𝜔𝑝(𝐾𝑝𝑠 + 𝐾𝐼) 𝑠3+ 𝜔 𝑝𝑠2+ 𝜔𝑝𝐾𝑝𝑠 + 𝜔𝑝𝐾𝐼 (2.28)
16 圖 2.12 多重參考框鎖相迴路線性化並簡化之系統方塊圖 由(2.27)可以得知此系統得轉移函數和加裝低通濾波器之同步參考框鎖相迴路的轉移 函數相似,雖然低通濾波器的截止頻率一樣關係響應的速度以及對於高頻的抑制能力, 但和同步參考框鎖相迴路相比此種方法可以完全消去因電壓三相不平衡故障造成對於 估測相位和估測振幅之震盪情形。 為比較多重參考框鎖相迴路和同步參考框鎖相迴路的效果。考慮圖 2.4 的模擬條件, 由圖 2.13 和 2.14 可以發現當三相的電壓在 0.1 秒發生故障後多重參考框鎖相迴路估測 的正向序電壓會是三相平衡的電壓,也可以很穩定地追蹤到相位之變化以及電壓的振幅。 此外在設計要求上對於高頻諧波有較嚴苛的要求時,例如需要完全消去六倍基頻的諧波 時,更可以額外增加針對六倍基頻的參考框,讓估測相位時系統並不會經受到電網上六 倍基頻諧波的影響,雖然這樣會增加額外的計算成本,但比起單純利用低通濾波器會有 更好的高頻抑制效果。 圖 2.13 估測相之正向序三相電壓波形
17 圖 2.14 多重參考框鎖相迴路估測之電壓和相位
2.4 雙通用積分器鎖相迴路
不同於多重參考框鎖相迴路是運用兩個不同的參考框訊號相減的方式消去三相不 平衡故障中負向序之分量的影響,這一種鎖相迴路則是利用由 Lyon 所提出的瞬時對稱 分量分析法[21]可以經由運算的分析直接從三相電壓分別得到正向序和負向序的兩種 向量的分量,比起多重參考框鎖相迴路中須利用兩個帕克轉換之矩陣方能得到正向序的 分量,順時對稱分量法僅利用簡單的運算便可以分離出正向序和負向序的向量,一個瞬 時的三相電壓其正向序及負向序分量的關係式如(2.29)和(2.30)所示 𝑉𝑎𝑏𝑐+ = 1 3[ 1 𝑎2 𝑎 𝑎 1 𝑎2 𝑎2 𝑎 1] 𝑉𝑎𝑏𝑐 (2.29) 𝑉𝑎𝑏𝑐− = 1 3[ 1 𝑎 𝑎2 𝑎2 1 𝑎 𝑎 𝑎2 1] 𝑉𝑎𝑏𝑐 (2.30) 其中𝑎 = 𝑒−𝑗23𝜋,利用(2.19)以及式(2.3)的克拉克轉換可以得到三相的瞬時電壓在正交 軸上之正向序電壓的關係:18 𝑉𝛼𝛽+ =2 3 [ 1 −1 2 − 1 2 0 √3 2 − √3 2 ] ∗ 𝑉𝑎𝑏𝑐+ =2 3 [ 1 −1 2 − 1 2 0 √3 2 − √3 2 ] ∗ [1 𝑎 2 𝑎 𝑎 1 𝑎2 𝑎2 𝑎 1] ∗ 𝑉𝑎𝑏𝑐 =23[1 − 1 2 − 1 2 0 √32 −√32] ∗ [ 1 𝑎2 𝑎 𝑎 1 𝑎2 𝑎2 𝑎 1] ∗ [ 1 0 −12 √32 −12 −√32] ∗ 𝑉𝛼𝛽 = 1 2[ 1 −𝑞 𝑞 1 ] 𝑉𝛼𝛽 , q = 𝑒−𝑗 𝜋 2 (2.31) 方程式(2.31)中 q 是相位落後 90 度並且和原訊號波形正交的運算元,因此僅需利用垂 直訊號產生器便可得到三相電壓中正向序的分量。垂直訊號產生器的實現方式有很多種, 最直接的方式是利用傳輸延遲的數位元件,但這種方式會因為系統的頻率發生變動時而 無 法 獲 得 正 確 的 相 位 落 後 訊 號 , 因 此 較 好 的 方 式 是 用 非 線 性 的 增 強 型 鎖 相 迴 路 (Enhanced PLL, EPLL)[5]、[6]或二階通用積分器(Second order generalized integrator, SOGI)[8]-[10]。本論文中將利用二階通用積分器作為垂直訊號產生器其方塊圖如圖 2.15 所示,得知輸入和輸出的轉移函數為 F(s) =𝑑 𝑓(𝑠) = 𝑠𝜔′ 𝑠2+ 𝜔′2 (2.32) 圖 2.15 基本的二階通用積分器之系統方塊圖
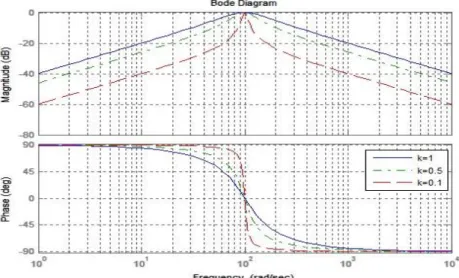
19 圖 2.16 改良過之二階通用積分器系統方塊圖 由式(2.32)可以得知當二階通用積分器輸入𝑓為一個步階函數時,輸出為一個在𝜔′震盪 之弦波,若輸入是頻率為𝜔′的弦波訊號時二階通用積分器則成為讓弦波震幅隨時間增加 之積分器。當改變二階通用積分器的結構為如圖 2.16 所示時,可用來追蹤輸入之弦波 訊號,輸入𝑣對於輸出𝑣′的轉移函數可表示為: D(s) =𝑣′ 𝑣 (𝑠) = 𝑘𝜔′𝑠 𝑠2+ 𝑘𝜔′𝑠 + 𝜔′2 (2.33) 其中𝑘和𝜔′分別決定系統的阻尼係數和共振頻率。圖 2.17 為輸出轉移函數之波德圖,從 圖上可以得知𝑣′在此系統中的響應相當於是帶通濾波器的效果,對於頻帶外之的訊號皆 有抑制的能力,而𝑘值的改變除了直接影響了濾波器的效果外,越小的𝑘代表濾波器的頻 寬就越窄,濾波效果越明顯。通用積分器的另一個輸出𝑞𝑣′和輸入的轉移函數可表示為: Q(s) =𝑞𝑣′ 𝑣 (𝑠) = 𝑘𝜔′2 𝑠2+ 𝑘𝜔′𝑠 + 𝜔′2 (2.34) 圖 2.18 為𝑞𝑣′的轉移函數之波德圖,從圖上得知𝑞𝑣′輸出的響應也是一個帶通濾波器的 行為,𝑘值也影響著系統頻帶的寬度。當通用積分器之輸入訊號為一弦波時這兩個輸出 訊號為相同頻率之弦波訊號,且𝑞𝑣′的相位總是落後𝑣′相位 90 度,這個相位落後的現象 不論在任何的輸入頻率、𝜔′或𝑘皆成立。因此利用通用積分器之特性當電網之基頻頻率 為濾波器的頻寬中心時可分別得到正交軸上基頻頻率的原始訊號及其正交之訊號。
20
圖 2.17 改良過之二階通用積分器 D(s)之波德圖
圖 2.18 改良過之二階通用積分器 Q(s)之波德圖
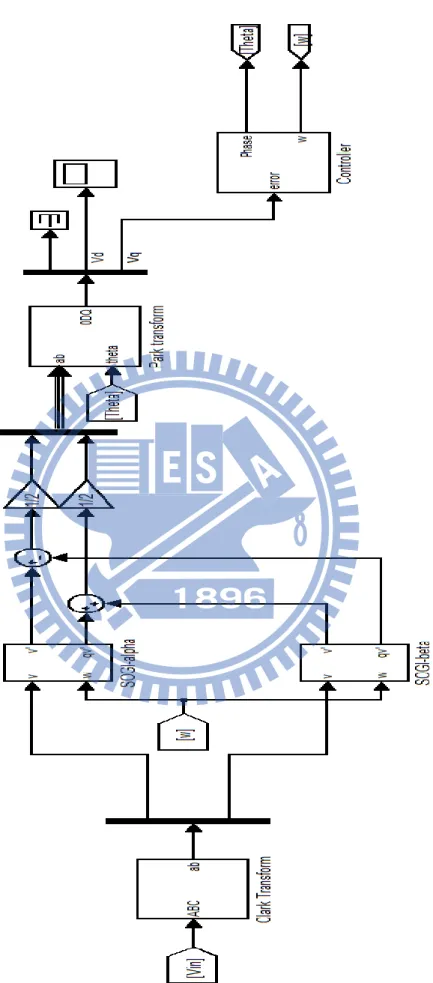
21 利用兩個二階通用積分器的特性和順時對稱分量分析的方法可以設計出一種結構 簡單而且可以去除不平衡故障中負向序分量的鎖相迴路其方塊圖如圖 2.19 所示。將α 和β軸上的訊號分別利用二階通用積分器個別產生出兩組互相垂直的訊號,運算後得到 正向序的訊號,再經過帕克轉換和利用比例積分控制器得到追蹤相角的效果,整個系統 的輸入和輸出轉移函數為 [𝑣̃𝛼,1 + 𝑣̃𝛽,1+ ] = 1 2 [ 𝑘𝜔̃𝑠 𝑠2+ 𝑘𝜔̃𝑠 + 𝜔̃2 − 𝑘𝜔̃2 𝑠2+ 𝑘𝜔̃𝑠 + 𝜔̃2 𝑘𝜔̃2 𝑠2+ 𝑘𝜔̃𝑠 + 𝜔̃2 𝑘𝜔̃𝑠 𝑠2+ 𝑘𝜔̃𝑠 + 𝜔̃2 ] [𝑣𝑣𝛼 𝛽] (2.35) 比較(2.22)和(2.35)可以發現當式(2.22)的𝜔𝑝 = 𝑘𝜔̃/2時,雙通用積分器鎖相迴路 與多重參考框鎖相迴路之轉移函數是相同的,這兩種鎖相迴路在滿足這個條件下可以視 為相同的控制結構,因此雙二階通用積分鎖相迴路在線性化後的系統可以等效為多重參 考框鎖相迴路之線性化模型。圖 2.20 表示為輸入電壓和圖 2.4 有相同條件時估測之三 相波形的結果,可知不平衡的三相電壓經過雙通用積分器後可以順利地分解出的正向序 為三相平衡的波型。圖 2.21 表示當雙通用積分器鎖相迴路在三相電壓不平衡時其相位 追蹤以及電壓估測的結果和多重參考框鎖相迴路一樣良好,不過兩者之間雙通用積分器 鎖相迴路的結構較為簡單。 圖 2.20 輸入之電壓和估測之正向序三相電壓波形
22 圖 2.21 雙通用積分器鎖相迴路估測之電壓和相位 以上介紹的這三種鎖相迴路中,結構最簡單的同步參考框鎖相迴路只需設計比例積 分控制器的參數,其系統就擁有良好的反應速度、不錯的高頻諧波抑制能力並且可以準 確地估測相位和電壓,但最大的缺點為僅能在三相平衡的條件下才有良好的鎖相效果, 雖然額外加上了低通濾波器可以降低不平衡故障的影響,但不平衡的干擾依然讓估測的 相位無法在控制上使用。多重參考框鎖相迴路和雙通用積分器鎖相迴路則是當電網發生 不平衡故障時可以有效地消除負向序的影響,且可以利用額外增加元件的方式得以消除 特定頻率之雜訊如同[4]、[22]、[23]中所提出,理想上可以利用這種方式消除電網上 全部的高頻諧波,但是整個系統必須付出成本增加的代價。一般情況下良好設計的比例 積分回授控制對於追蹤相位及估測震幅大小擁有不錯的響應結果,且比例積分回授控制 是一個十分常用的控制器,除了結構簡單外而且相位和頻率的變化之穩態誤差皆為零, 因此在鎖相迴路中大多利用比例積分控制器來達到系統控制之目的,但是比例積分器存 在一個影響系統暫態響應的零點,當追求快速的響應時卻不得不接受較大的最大超越量, 若要兼顧最大超越量和反應速度卻又得必須犧牲系統對於高頻雜訊的抑制能力。若可以 尋找新的控制方式在相同的要求內使得系統除了滿足相同的暫態響應要求並且有較低 的最大超越量或在不犧牲高頻抑制能力的條件下使得暫態響應的結果更好,這樣的做法 使得成本比較便宜而且系統的結構也比較簡單。
23
三、控制器設計與分析
由於同步參考框鎖相迴路在不平衡電壓的情況下得到的結果不甚理想,實際電網運 用的鎖相迴路系統大多會使用如多重參考框鎖相迴路或雙通用積分器鎖相迴路等這類 可以完全消除不平衡故障的系統,當電網上的相位或頻率發生改變時,一般多是藉由帕 克轉換後得到的 q 軸相位誤差訊號作為控制器的輸入來達到追蹤相位的目的。本論文主 要是研究當利用雙通用積分器為鎖相迴路的相位偵測元件時,其控制器除了常用的比例 積分回授控制外,是否有其餘的控制方式可以運用,並且分析不同控制方法運用於鎖相 迴路時的暫態響應和高頻抑制能力。本章會探討虛擬微分回授控制、自適性調整之比例 積分回授控制以及 Q 參數化等三種新的控制器設計方式。首先分析比例積分控制器的參 數設計對於系統響應之影響和高頻諧波的抑制效果,再介紹虛擬微分回授控制和比例積 分控制的差異,以及分析虛擬微分回授控制在鎖相迴路的控制,接著探討自適性調整之 比例積分回授控制及 Q 參數化這兩種方式所設計出之控制器。由於鎖相迴路的系統實際 上為一個非線性且和三角函數相關的系統,為了簡化系統利於探討,假設系統處於相位 近乎鎖定的情況並且將之線性化,且由第二章第四節得知雙通用積分器鎖相迴路線性化 之後等效為一個低通的濾波器,且等校之低通濾波器截止頻率和雙通用積分器必須滿足 𝜔𝑝 = 𝑘𝜔̃/2的關係。3.1 雙通用積分器鎖相迴路利用比例積分回授控制之分析
一般鎖相迴路大多是使用比例積分回授控制作為控制方法,原因不外乎因為比例積 分回授控制結構十分簡單,對於暫態響應和高頻抑制上也都有不錯的表現,而且由於比 例積分回授控制發展久遠在設計上有較多方法和經驗被提出,讓這種控制方式在各種不 同的系統要求下足以選出最佳的控制之參數,本節將利用最大的相位裕度設計讓比例積 分控制器參數達到最佳化設計。24
3.1.1 比例積分回授控制系統之最大相位裕度設計
比 例 積 分 回 授 控 制 的 分 析 及 設 計 在 [24] 中 主 要 是 利 用 對 稱 最 佳 化 設 計 法 (symmetrical optimum method)[25]對比例積分控制器的參數做詳盡的分析與設計的探 討,本節僅將簡略的分析以及探討其比例回授控制之暫態響應與高頻抑制的影響。 圖 3.1 雙通用積分器鎖相迴路之線性化系統方塊圖 利用第二章第四節中對於雙通用積分器鎖相迴路的分析,可以得知在相位接近鎖定的條 件下其線性化後鎖相迴路的系統方塊圖為圖 3.1 所示,由圖中的可知在沒有輸入雜訊干 擾,即𝑣̃𝑞(𝑠) = 0時,此線性化後系統之輸入相位和輸出預估相位之開路轉移函數如(3.1)。 G(s) =𝜔𝑝(𝐾𝑝𝑠 + 𝐾𝐼) 𝑠2(𝑠 + 𝜔 𝑝) = 𝜔𝑝𝐾𝑝(𝑠 + 𝜔𝑧) 𝑠2(𝑠 + 𝜔 𝑝) , 𝜔𝑧 = 𝐾𝐼 𝐾𝑝 (3.1) 在[24]的參數設計中考慮系統最大相位裕度的設計,假設𝜔𝑐為系統之開路增益截止 頻率,即開路轉移函數在𝜔 = 𝜔𝑐時的增益為一,則由(3.1)得到增益與相位之關係為: |𝐺(𝑗𝜔𝑐)| = 𝜔𝑝𝐾𝑝√𝜔𝑐2+ 𝜔 𝑧2 𝜔𝑐2√𝜔 𝑐2+ 𝜔𝑝2 = 1 (3.2) 𝑃𝑀 = 𝑡𝑎𝑛−1(𝜔𝑐 𝜔𝑧) − 𝑡𝑎𝑛−1( 𝜔𝑐 𝜔𝑝) (3.3) 為選擇增益穿越頻率以得到最大的相位裕度,將(3.3)對𝜔𝑐微分可以得到關係式如(3.4)。 1 𝜔𝑧 1 + (𝜔𝜔𝑐 𝑧) 2 − 1 𝜔𝑝 1 + (𝜔𝑐 𝜔𝑝) 2 = 0 (3.4)
25 將方程式(3.4)整理後可以得到增益截止頻率的關係式為: 𝜔𝑐 = √𝜔𝑧𝜔𝑝 (3.5) 而且增益截止頻率必須滿足(3.2)的增益關係式,因此將(3.5)代入(3.2)式中可以得到 𝐾𝑝 = √𝜔𝑧𝜔𝑝 = 𝜔𝑐 (3.6) 在決定𝜔𝑝和𝜔𝑧後,當增益穿越頻率滿足(3.6)的關係則系統將可以擁有在此增益穿越頻 率下之最大相位裕度,若假設𝜔𝑝 = 𝑔2𝜔𝑧則由(3.5)和(3.6)可以得到𝐾𝑝、𝜔𝑝和𝜔𝑧之關係 式為: { 𝐾𝑝 = 𝜔𝑐 𝜔𝑝 = 𝑔𝜔𝑐 𝜔𝑧= 𝐾𝐼 𝐾𝑝 = 𝜔𝑐 𝑔 (3.7) 式(3.7)的關係式可知控制器參數設計𝐾𝑝、𝐾𝐼以及𝜔𝑝可完全藉由調整適當的參數𝑔和𝜔𝑐 來決定,且所對應的相位裕度可以簡化為: 𝑃𝑀 = 𝑡𝑎𝑛−1(𝑔) − 𝑡𝑎𝑛−1(1 𝑔) = 𝑡𝑎𝑛−1( 𝑔2− 1 2𝑔 ) (3.8) 式(3.8)中餘切函數為一個遞增的函數且(𝑔2− 1)/2𝑔也是一個𝑔的遞增函數,因此相位 裕度對於g 的變動為嚴格遞增函數,因為: 𝑑 𝑑𝑔( 𝑔2− 1 2𝑔 ) = 𝑔2+ 1 2𝑔2 > 0 (3.9) 式(3.8)的關係可用圖 3.2 表示,由圖中得知當𝑔值越大則系統的相位裕度也將越大,這 是因為參數𝑔主要關係著𝜔𝑝和𝜔𝑧的值,當𝑔越大時低通濾波器造成的極點越遠而控制器 之零點則越靠近原點所以系統的相位裕度也就越大。相位裕度是關係著系統的穩定度, 太小的相位裕度可能因為干擾而導致系統不穩定,過大的相位裕度則對於系統沒甚麼特 別的意義,一般系統的相位裕度大約都是建議介於 30 度至 60 度之間,在建議的相位裕 度區間內參數𝑔可調整之範圍為1.732 < 𝑔 < 3.373之間。
26 圖 3.2 參數𝑔和相位裕度之關係圖
3.1.2 比例積分回授控制系統的暫態響應之分析
鎖相迴路之暫態的性能要求是在系統發生相位或頻率變化時快速地達到相位和頻 率的穩定追蹤效果,因此系統穩定時間的快慢是鎖相迴路最重要的暫態響應要求。為探 討比例積分回授控制的參數對於暫態響應之影響,將(3.7)代入(3.1)中則系統之開路轉 移函數改寫為: G(s) = 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 𝑠2(𝑠 + 𝑔𝜔 𝑐) (3.10) 由(3.10)式可知輸入相位和輸出預估相位之閉迴路轉移函數為 ϕ̃1+(s) ϕ1+(s)= 𝑔𝜔𝑐2𝑠 + 𝜔 𝑐3 𝑠3+ 𝑔𝜔 𝑐𝑠2+ 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 = 𝜔𝑐2[(2𝜁 + 1)𝑠 + 𝜔𝑐] (𝑠 + 𝜔𝑐)[𝑠2+ 2𝜁𝜔𝑐𝑠 + 𝜔𝑐2] , 𝑔 = 2𝜁 + 1 (3.11) 當輸入相位發生步階變化如(3.12),則輸出之預估相位的響應將為(3.13)所示。 ϕ1+(𝑠) = 𝐴 𝑠 (3.12) ϕ̃1+(s) = 𝐴𝜔𝑐2[(2𝜁 + 1)𝑠 + 𝜔𝑐] 𝑠(𝑠 + 𝜔𝑐)[𝑠2+ 2𝜁𝜔𝑐𝑠 + 𝜔𝑐2] (3.13) 將(3.13)取反拉式轉換後可以得到在時域上的表示式,由不同阻尼係數的範圍分別表示 為以下三種:27 當𝜁 < 1時輸出相位的預估函數為: ϕ̃1+(𝑡) = 𝐴 {𝑒−𝑡+ 𝜁 1 − 𝜁𝑒−𝜔𝑐𝑡− 1 1 − 𝜁𝑒−𝜔𝑐𝑡cos [(𝜔𝑐√1 − 𝜁2) 𝑡]} (3.14) 當𝜁 = 1時輸出相位的預估函數為: ϕ̃1+(𝑡) = 𝐴{𝑒−𝑡− 𝑒−𝜔𝑐𝑡− 𝜔𝑐𝑡𝑒−𝜔𝑐𝑡+ 2𝜔𝑐2𝑡2𝑒−𝜔𝑐𝑡} (3.15) 當𝜁 > 1時輸出相位的預估函數為: ϕ̃1+(𝑡) = 𝐴 {𝑒−𝑡+ 1 1 − 𝜁𝜁𝑒−𝜔𝑐𝑡− 1 2𝑒−(𝜁+√𝜁 2−1)𝜔 𝑐𝑡−1 2𝑒−(𝜁−√𝜁 2−1)𝜔 𝑐𝑡} (3.16) 方程式(3.14)至(3.16)發現無論阻尼係數的值為多少系統的收斂速度和增益穿越頻率 𝜔𝑐有很大的直接關係,越大的𝜔𝑐造成系統越快速的收斂速度。圖 3.3 與圖 3.4 為線性化 後增益穿越頻率為 27 Hz 鎖相迴路系統相位發生單位步階變化時不同的阻尼係數對於系 統之穩定時間和最大超越量之影響,可以發現主要影響系統響應速度的為增益穿越頻率, 但當阻尼係數小於 0.5 時因為系統過於震盪,所以其穩定時間明顯較慢,且阻尼係數 𝜁 > 0.7後系統的穩定時間因響應速度變慢而上升。系統的最大超越量則是隨阻尼係數越 大而降低,當阻尼係數介於 0.5 至 1 之間時是較好的選擇區間。 圖 3.3 阻尼係數對穩定時間之影響
28 圖 3.4 阻尼係數對最大超越量之影響
3.1.3 比例積分回授控制高頻雜訊抑制能力之分析
增益穿越頻率除了影響整個系統反應速度,同時也關係著鎖相迴路系統對於高頻雜 訊的抑制能力,當增益穿越頻率越高時雖然系統的響應速度會越快,但高頻雜訊的抑制 能力便會越差。探討高頻雜訊的輸入對於輸出之關係可以了解不同增益穿越頻率的影響, 由圖 3.1 可以得知高頻雜訊輸入對於輸出估測相位的轉移函數為: 𝐺𝑑(s) = ϕ̃𝑣̃1+(s) 𝑞(s) = 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 𝑠3+ 𝑔𝜔 𝑐𝑠2+ 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 (3.17) 圖 3.5 表示增益穿越頻率為 25 Hz 時開迴路轉移函數和高頻雜訊之轉移函數的波德圖, 圖中可知系統的開路轉移函數與高頻雜訊之轉移函數在高頻率的時候頻率與增益間的 關係兩者間的效果是相同的,因此對於高頻雜訊其振幅的衰減可以由系統之開路轉移函 數的近似結果得到: atten𝜔ℎ = |𝐺𝑜𝑙(𝑗𝜔ℎ)| ≈ −20𝑙𝑜𝑔 𝜔ℎ 𝜔𝑐 − 20𝑙𝑜𝑔 𝜔ℎ 𝜔p (3.18)29 圖 3.5 開路轉移函數和干擾的轉移函數之波德圖 3.6 阻尼係數對高頻抑制能力和之影響 由於電網中換相器的特性以及雙通用積分器是利用瞬時對稱分量法作為消去不平 衡故障的方式,所以第一個諧波真正影響到鎖相迴路的頻率為負五倍或正七倍的基頻, 且由於帕克轉換的關係實際上進入系統中的雜訊頻率為電網基頻的正六倍和負六倍,以 台灣電網的頻率 60 Hz 為例,則第一個高頻諧波的頻率為±360 Hz。圖 3.6 為當系統的 增益穿越頻率為 27 Hz 時對於正六倍基頻雜訊的抑制效果,越小的阻尼係數相當於系統 的極點越接近原點,對於高頻的抑制效果越好。另外增益穿越頻率的高低也影響著系統
30 高頻抑制的能力但同時間也會影響著系統響應的快慢,不過這是一個無法兼顧兩者要求 的兩難狀況,因此增益穿越頻率的選擇必須視系統的要求來決定。
3.1.4 比例積分回授控制穩態誤差之分析
最後探討比例積分回授對於輸入發生單位步階或單位斜坡變化時其穩態誤差的影 響,利用終值定理可以得到其穩態誤差為: 𝐸𝑠𝑡𝑒𝑝 = lim 𝑠→0(𝑠 ∗ 1 1 + G(s)∗ U(s)) = lim 𝑠→0(𝑠 ∗ 𝑠2(𝑠 + 𝑔𝜔 𝑐) 𝑠3+ 𝑔𝜔 𝑐𝑠2+ 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 ∗ 1 𝑠) = 0 (3.19) 𝐸𝑟𝑎𝑚𝑝= lim 𝑠→0(𝑠 ∗ 1 1 + G(s)∗ R(s)) = lim 𝑠→0(𝑠 ∗ 𝑠2(𝑠 + 𝑔𝜔 𝑐) 𝑠3+ 𝑔𝜔 𝑐𝑠2+ 𝑔𝜔𝑐2𝑠 + 𝜔𝑐3 ∗ 1 𝑠2) = 0 (3.20) 由於比例積分回授控制的開迴路轉移函數為一個型態二之系統,不論是相位的步階變化 或頻率的步階變化系統都可以達到沒有誤差的追蹤。 從以上最大相位設計的探討中可知雙通用積分器之參數及比例控制器之參數對於 系統暫態響應、高頻雜訊抑制能力以及穩態誤差的影響。利用比例積分控制器設計的好 處在於簡單而且分析不複雜,其比例積分回授控制的效果不論是暫態響應或穩態響應的 效果都十分良好。3.2 雙通用積分器鎖相迴路利用虛擬微分回授控制之分析
虛擬微分回授(Pseudo-derivative feedback ,PDF)的控制方法[26]最早是由 R.M. Phelan 於 1977 年時提出,這種控制方式雖然沒有像比例積分回授控制那般常見,但其 暫態響應的效果十分良好,而且結構也很簡單。不過虛擬微分回授制是利用結構上的改 變使得系統擁有微分特性的好處,但是實際上並不會因為零點的關係而使得系統有較大 的最大超越量以及較差的高頻抑制效果。31
3.2.1 虛擬微分回授控制和比例積分回授控制的比較
由於虛擬微分回授控制和比例積分回授控制的結構以及系統的性質十分相似,所以 常會將此兩種控制方法做比較,本小段將比較這種兩種控制方式分別對一個相同的一階 系統做控制,簡略地闡述兩者系統以及單位步階響應的差異,在[27]和[28]中則有較為 詳盡的分析和比較。圖 3.7 為利用比例積分回授控制一個簡單之一階的受控系統,由圖 中可以得知此系統之閉迴路轉移函數為 𝑌(𝑠) 𝑈(𝑠) = 𝐾𝑝𝑠 + 𝐾𝐼 𝑠2 + 𝐾 𝑝𝑠 + 𝐾𝐼 (3.21) 圖 3.7 比例積分回授控制簡單的一階系統 由轉移函數(3.21)可以得知系統轉移函數中分子和分母的係數可藉由調整𝐾𝑝和𝐾𝐼而改 變,一旦決定系統所需之極點位置時,其零點的位置後也隨之固定。由於比例積分回授 控制的系統中存在了一個零點,而此零點使得整個系統有別於標準的二階系統,若利用 標準二階系統來分析則系統之阻尼係數和自然無阻尼頻率為: ξ = 𝐾𝑝 2√𝐾𝐼 (3.22) 𝜔𝑛 = √𝐾𝐼 (3.23) 在標準二階系統的轉移函數中,系統的單位步階響應的反應速率和自然無阻尼頻率成正 比的關係,而且系統的阻尼係數決定暫態響應中最大超越量的大小,越大阻尼係數則代 表越小的最大超越量。但因為比例積分回授控制的系統擁有一個零點,使得其暫態響應 和標準的二階系統的響應並不相同。零點在此系統中相當於是對誤差做微分的效果,因32 此對其暫態響應的影響是增加系統的最大超越量並且加快系統的上升時間,而對穩定時 間則沒有任何顯著的影響,但當系統在阻尼係數超過一的條件下,最大超越量依然會存 在於暫態響應之中,並無法像標準的二階系統般令最大超越量降至零,這是利用比例積 分回授控制一個明顯的缺點。 將虛擬微分回授控制運用於一樣的一階受控系統,則其系統方塊圖如圖 3.8 所示, 並且系統的輸入和輸出之閉迴路轉移函數為: 𝑌(𝑠) 𝑈(𝑠)= 𝐾𝐼 𝑠2+ 𝐾 𝐷𝑠 + 𝐾𝐼 (3.24) 圖 3.8 虛擬微分回授控制簡單的一階系統 由(3.24)可知系統的閉迴路轉移函數一樣是改變𝐾𝐷和𝐾𝐼來決定轉移函數的極點位置,和 比例積分回授控制的轉移函數差別只在於分子項並沒有零點,而且此轉移函數為標準的 二階系統,由標準的二階系統分析可以得到其阻尼係數和自然無阻尼頻率為: ξ = 𝐾𝐷 2√𝐾𝐼 (3.25) 𝜔𝑛 = √𝐾𝐼 (3.26) 虛擬微分回授控制的暫態響應和比例積分回授控制有些類似的特性,自然無阻尼頻率一 樣關係著系統暫態響應的速度,阻尼係數也一樣決定系統最大超越量的大小。由於轉移 函數的分子並不存在一個零點,因此由標準二階系統的分析得知當系統的阻尼係數ξ ≥ 1 時系統的最大超越量為零。 當這兩個系統的開路轉移函數在相同的增益穿越頻率的條件下,比較虛擬微分回授 控制和比例積分回授控制對於單位步階響應的暫態關係之差異。由圖 3.9 得知阻尼係數
33 對於穩定時間和最大超越量的影響。當阻尼係數增加時不論是比例積分回授控制或虛擬 微分回授控制其最大超越量皆有逐漸變小的趨勢,但僅有虛擬微分回授控制在阻尼係數 大於 1 後最大超越量降為零。穩定時間的影響則是當阻尼係數約小於 0.6 時,兩者的穩 定時間皆隨之下降,但當大於 0.6 後比例積分回授控制其穩定時間有逐漸增加的趨勢, 而虛擬微分回授控制則是依然隨著阻尼係數增加而持續漸少,直到當阻尼係數大於一後 穩定時間才大約維持在一個固定的值。 圖 3.9 阻尼係數對穩定時間及最大超越量之影響 除了用穩定時間和最大超越量比較兩種控制方式的優劣外,也利用誤差絕對值積分 (Integer Absolute Error, IAE)和誤差平方積分(Integer Square Error, ISE)作為指 標,當這兩個指標的數值越小時代表著輸出和輸入間的誤差越小,控制器的效果也就越 好,其中誤差絕對值積分和誤差平方積分的公式為: IAE = ∫ |𝑒(𝑡)|𝑑𝑡 𝑡 0 (3.27) ISE = ∫ 𝑒𝑡 2(𝑡)𝑑𝑡 0 (3.28) 圖 3.10 是比例積分回授控制和虛擬微分回授控制的阻尼係數對於這兩種指標的比較, 由圖中可以發現誤差絕對值積分和誤差平方積分兩個指標的數值皆隨著阻尼係數的增 加而降低,在誤差平方積分的指標中兩者的結果十分接近,不過在誤差絕對值積分的指 標中虛擬微分回授控制的效果是較比例積分回授控制擁有較好的結果。
34 圖 3.10 阻尼係數對 IAE 及 ISE 之影響 另外因為電網上存在許多高頻諧波的干擾,虛擬微分回授控制和比例積分回授控制 兩者間對於高頻干擾輸入的分析是值得探討的問題。由兩個系統的方塊圖中得到雜訊干 擾對於輸出之轉移函數分別為 𝑌(𝑠) 𝐷(𝑠)|𝑈(𝑠)=0 = 𝐺𝑑_𝑃𝐼(𝑠) = 𝐾𝑝𝑠 + 𝐾𝐼 𝑠2+ 𝐾 𝑝𝑠 + 𝐾𝐼 (3.29) 𝑌(𝑠) 𝐷(𝑠)|𝑈(𝑠)=0 = 𝐺𝑑_𝑃𝐷𝐹(𝑠) = 𝐾𝐼 𝑠2+ 𝐾 𝐷𝑠 + 𝐾𝐼 (3.30) 當 𝑠 = 𝑗𝜔ℎ時可以得到系統對於高頻雜訊的增益抑制能力,其中𝜔ℎ為高頻雜訊之頻率:
atten𝜔ℎ = 20 log(|𝐺𝑑𝑃𝐼(𝑗𝜔ℎ)|) = 20 log
( √𝐾𝐼2+ 𝐾 𝑝2𝜔ℎ2 √(𝐾𝐼− 𝜔ℎ2)2+ 𝐾 𝑝2𝜔ℎ2) (3.31)
atten𝜔ℎ = 20log (|𝐺𝑑𝑃𝐷𝐹(𝑗𝜔ℎ)|) = 20log (
𝐾𝐼 √(𝐾𝐼− 𝜔ℎ2)2+ 𝐾 𝐷2𝜔ℎ2 ) (3.32) 圖 3.11 為兩個系統的開路轉移函數有相同的增益穿越頻率時,其系統對於頻率為增益 穿越頻率之十倍的高頻訊號之抑制效果。圖中顯示不論是哪一種控制的方式當阻尼係數 越大時高頻雜訊抑制之效果便會越差,在相同的阻尼係數下時虛擬微分回授控制的高頻 雜訊的抑制效果則是較優秀。
35 圖 3.11 阻尼係數對高頻抑制能力之影響 由以上的分析可知虛擬微分回授控制的暫態響應以及高頻抑制的效果較比例積分 回授控制好,且在誤差絕對值積分和誤差平方積分的兩種指標比較中,雖然誤差平方積 分兩者的差距是十分微小,但在誤差絕對值積分中的表現較為優良。這些代表虛擬微分 回授控制比起比例積分控制在各方面都比較突出,不過在系統穩態誤差的表現上比例積 分回授控制較好,因為比例積分回授控制為一個型態二的系統,所以不論是步階或是斜 坡的穩態誤差都是零,但虛擬微分回授控制是型態一的系統,當系統發生斜坡變化時穩 態誤差將固定為一個非零的常數。
3.2.2 虛擬微分回授控制穩定度之分析
若是利用虛擬微分回授控制取代原來的比例積分回授控制,由前一小段中簡單系統 的分析可以了解,比例積分回授控制因為其系統的分子有一個零點的關係,而造成的較 大的最大超越量及較差的高頻抑制能力。虛擬微分回授控制的系統並沒有受到零點的影 響,因此和比例積分回授控制相比可以擁有較小的最大超越量和較佳的高頻抑制能力。 雙通用積分器鎖相迴路利用虛擬微分回授控制之系統方塊圖如圖 3.12 所示。當系統處 於接近相位鎖定,且系統經過線性化以及電壓峰值的歸一化後可以得到如圖 3.13 所表 示的系統方塊圖。36 圖 3.12 利用 PDF 之雙通用積分器鎖相迴路系統方塊圖 圖 3.13 線性化之系統方塊圖 由圖 3.13 之系統方塊圖在忽略高頻雜訊的干擾下,得到輸入相位和預估之輸出相位的 開迴路轉移函數為: G(s) = 𝜔𝑝𝐾𝐼 𝑠(𝑠 + 𝜔𝑝)(𝑠 + 𝐾𝐷) (3.33) 當系統的頻率為增益穿越頻率𝑠 = 𝑗𝜔𝑐時相位裕度以及系統增益的關係為: 𝑃𝑀 = 90 − 𝑡𝑎𝑛−1(𝜔𝑐 𝜔𝑝) − 𝑡𝑎𝑛−1( 𝜔𝑐 𝐾𝐷) (3.34) |𝐺(𝑗𝜔𝑐)| = 𝜔𝑝𝐾𝐼 𝜔𝑐√𝜔𝑐2+ 𝜔𝑝2√𝜔𝑐2+ 𝐾𝐷2 = 1 (3.35) 式(3.34)可以發現虛擬微分回授控制的相位由於沒有零點的關係,相位裕度並不會有極 值的存在,為使系統穩定因此參數𝐾𝐷可以調整的範圍將隨著低通濾波器的截止頻率𝜔𝑝 不同而改變,越大的截止頻率使得虛擬微分回授控制的參數𝐾𝐷調整的範圍越狹窄。