執行單位:國立交通大學
委託機關:交 通 部
中華民國 104 年 12 月
本報告為研究案並不代表交通部意見
「號誌控制技術研究計畫(2/4)」研究報告 I 目 錄 第一章 計畫簡介 ... 1 1.1 計畫背景與目的... 1 1.2 計畫內容與課題... 1 1.3 預期成果 ... 2 第二章 前期研究成果回顧 ... 3 2.1 混合車流號誌控制模式介紹 ... 3 2.1.1 變數對照表 ... 5 2.1.2 巨觀車流模式架構 ... 10 2.1.3 上游抵達與需求輸入... 10 2.1.4 車流推進模式 ...11 2.1.5 車道選擇模型 ...11 2.1.6 併入停等車道 ... 13 2.1.7 車隊疏解模式 ... 17 2.1.8 流量守恆 ... 18 2.1.9 號誌最佳化模式 ... 20 2.2 混合車流號誌控制模式評估 ... 22 2.3 前期軟體介面概述 ... 22 2.3.1 系統架構 ... 22 2.3.2 軟體輸入及輸出介面功能 ... 23 2.4 需求訪談摘錄與軟體功能開發規劃 ... 27 2.5 小結 ... 31 第三章 文獻回顧 ... 32 3.1 號誌時制最佳化模式 ... 32 3.1.1 獨立路口 ... 32 3.1.2 幹道系統 ... 38 3.2 車流模式與號誌最佳化模式 ... 43 3.2.1 格位推移模式 ... 43 3.2.2 細胞自動機 ... 48 3.2.3 其他模式 ... 51 3.3 機車專用道與公車專用道 ... 52 3.4 文獻小結 ... 56 第四章 研究方法 ... 57 4.1 混合車流號誌控制最佳化模式改良 ... 57 4.1.1 機車專用/優先道 ... 57 4.1.2 公車專用道 ... 60 4.1.3 快慢分隔島 ... 61 4.1.4 模式求解演算法設計... 62
4.2 軟體功能與介面改良 ... 68 4.2.1 參數設定指引 ... 68 4.2.2 本土化報表顯示及輸出 ... 69 4.2.3 新增 CLV 分析功能 ... 70 4.2.4 新增績效指標 ... 70 4.2.5 軟體介面改良成果 ... 73 第五章 路口交通實測測量與績效 ... 88 5.1 路口實測計畫 ... 88 5.1.1 調查目的與範圍 ... 88 5.1.2 調查期程與項目 ... 88 5.2 實證路口之遴選... 89 5.3 路口交通調查 ... 92 5.3.1 分項調查與方法 ... 92 5.4 模式參數校估與時制最佳化 ... 118 5.4.1 參數校估說明 ... 118 5.4.2 實證路口參數設定與事後時制 ... 120 5.4.3 快慢分隔島與公車專用道參數校估結果 ... 122 5.5 路口號誌調整前、後績效之比較 ... 125 第六章 結論與建議 ...132 重要參考文獻 ...135 附錄 A 路口幾何型態與周邊設施特性調查 附錄 B 路口號誌時制計畫現況調查 附錄 C 路口臨進路段速率分佈 附錄 D 公車站位與停靠公車實體屬性調查 附錄 E 路口上游路段尖峰小時流入交通量統計 附錄 F 路口尖峰小時轉向交通量統計 附錄 G 路口汽車停等車數依時分佈 附錄 H 路口機車停等車數依時分佈 附錄 I 路口汽機車停等車數事前/事後依時分佈比較圖 附錄 J 期中審查意見回覆 附錄 K 號誌控制技術研究計畫交通技術論壇與技術諮詢會議 附錄 L 號誌控制技術研究計畫成果說明會與教育訓練 附錄 M 投稿論文大綱 附錄 N 期末審查意見回覆
「號誌控制技術研究計畫(2/4)」研究報告 III 圖 目 錄 圖 2.1-1 模式架構 ... 3 圖 2.1-2 模式架構圖 ... 10 圖 2.1-3 上游抵達模式示意圖 ... 10 圖 2.1-4 虛擬車道概念示意圖 ... 13 圖 2.1-5 溢流車隊停等示意圖 ... 15 圖 2.3-1 號誌最佳化軟體功能層次結構 ... 23 圖 2.3-2 「禁行機車」設定功能 ... 23 圖 2.3-3 「全週期與半週期」設定功能 ... 24 圖 2.3-4 「存/讀檔功能」功能 ... 24 圖 2.3-5 「回復上一步」操作功能 ... 25 圖 2.3-6 「匯入底圖」操作功能 ... 25 圖 2.3-7 「時空圖與綠寬帶分析」功能 ... 26
圖 2.3-8 「績效-Throughput 顯示」與「績效-Travel time 顯示」功能 ... 26
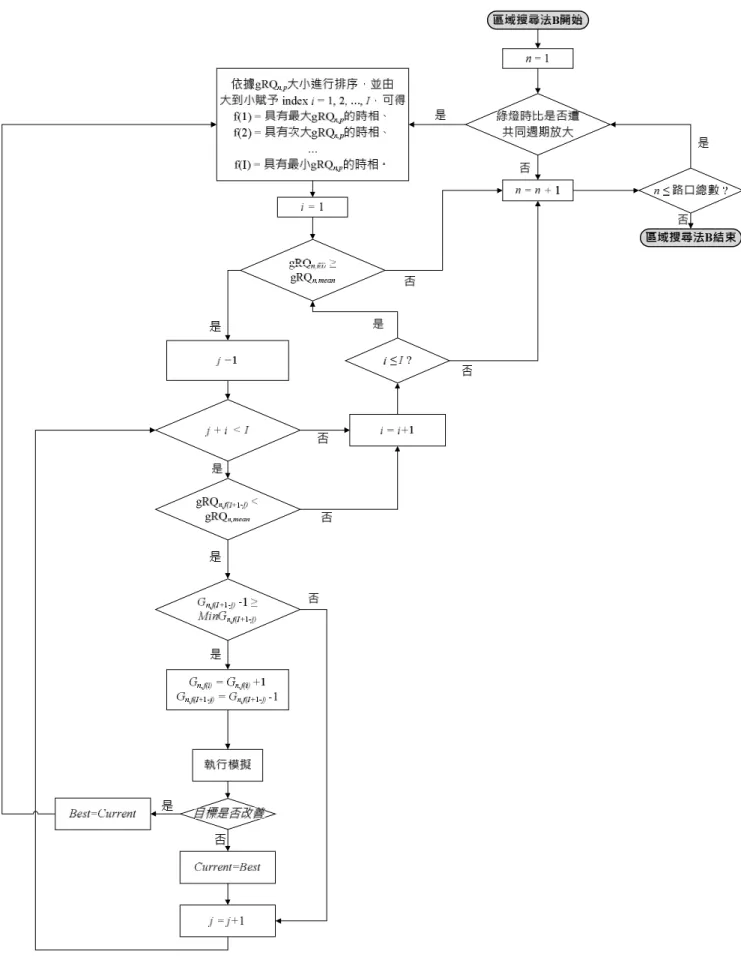
圖 3.1-1 車流時空圖 ... 39 圖 3.1-2 衝擊波(shockwave)示意圖... 42 圖 3.2-1 邏輯規則及隸屬函數編碼方式 ... 47 圖 3.2-2 異質粒子示意圖 ... 49 圖 3.2-3 車道群阻擋示意圖 ... 51 圖 3.2-4 區段分解為小段示意圖 ... 52 圖 3.3-1 機車專用道車道寬之定義 ... 53 圖 4.1-1 機車專用道(新竹市公道五路)... 57 圖 4.1-2 機車優先道(台北市承德路-大度路) ... 58 圖 4.1-3 機車優先道(新北市三重環河北路-龍門路) ... 58 圖 4.1-4 公車專用道(台北市仁愛路一段) ... 60 圖 4.1-5 圖示 CTM 模擬公車專用道 ... 61 圖 4.1-6 快慢分隔島(新竹市公道五路)... 62 圖 4.1-7 前期求解演算法流程圖 ... 63 圖 4.1-8 本期求解演算法流程圖 ... 64 圖 4.1-9 區域搜尋法 A 流程圖 ... 66 圖 4.1-10 區域搜尋法 B 流程圖 ... 67 圖 4.2-1 參數意義與介面查詢示意圖 ... 68 圖 4.2-2 參數設定錯誤提醒示意圖 ... 69 圖 4.2-3 本土化報表顯示與輸出頁面示意圖... 70 圖 4.2-4 CLV 結果呈現示意圖 ... 70 圖 4.2-5 績效指標-停等車輛數與停等次數示意圖 ... 71 圖 4.2-6 績效指標-停等延滯示意圖 ... 71 圖 4.2-7 績效指標-路口/幹道總延滯示意圖 ... 72
圖 4.2-8 參數設定及提醒功能畫面 ... 73 圖 4.2-9 參數意義及查詢功能畫面(1)... 74 圖 4.2-10 參數意義及查詢功能畫面(2) ... 74 圖 4.2-11 「累計車流量」輸入畫面 ... 75 圖 4.2-12 「尖峰小時車流量」輸入畫面 ... 75 圖 4.2-13 本土化報表產製 ... 76 圖 4.2-14 本土化報表(範例)資訊內容畫面(1) ... 77 圖 4.2-15 本土化報表(範例)資訊內容畫面(2) ... 77 圖 4.2-16 本土化報表(範例)資訊內容畫面(3) ... 78 圖 4.2-17 範例路口分析基本資訊 ... 78 圖 4.2-18 計算路口個方向車道群之小客車當輛數 ... 79 圖 4.2-19 判斷各分相中之臨界車道群 ... 79 圖 4.2-20 CLV 分析結果顯示畫面 ... 80 圖 4.2-21 停等車輛數與停等次數績效顯示畫面 ... 81 圖 4.2-22 停等延滯績效顯示畫面 ... 81 圖 4.2-23 路網總延滯績效顯示畫面 ... 81 圖 4.2-24 道路幾何「有-快慢分隔」之流量設定介面 ... 82 圖 4.2-25 道路幾何「無-快慢分隔」之流量設定介面 ... 82 圖 4.2-26 「機車專用道」參數設定與圖樣顯示畫面 ... 83 圖 4.2-27 「機車優先道」參數設定與圖樣顯示畫面 ... 83 圖 4.2-28 「公車專用道」參數設定與圖樣顯示畫面 ... 84 圖 4.2-29 「公車到站間隔」與「公車服務時間」參數設定畫面 ... 84 圖 4.2-30 新增路段編號顯示畫面 ... 85 圖 4.2-31 道路幾何設定防呆機制 ... 86 圖 4.2-32 「幹道/支道」設定用語修改畫面 ... 87 圖 5.2-1 實證路口 1:竹北市光明六路-博愛路口分佈位置示意圖 ... 91 圖 5.2-2 實證路口 2:台中市台灣大道-惠中路口分佈位置示意圖 ... 92 圖 5.3-1 竹北市光明六路-博愛路口幾何型態示意圖 ... 93 圖 5.3-2 台中市台灣大道-惠中路口幾何型態示意圖 ... 93 圖 5.3-3 道路現場測速示意圖 ... 94 圖 5.3-4 台灣大道公車專用道實證站位示意圖 ... 96 圖 5.3-5 台灣大道公車專用道公車到達間距分佈圖 ... 97 圖 5.3-6 台灣大道公車專用道雙節公車到達間距分佈圖 ... 98 圖 5.3-7 台灣大道公車專用道公車服務時間分佈圖 ... 98 圖 5.3-8 台灣大道公車專用道公車駐站時間分佈圖 ... 99 圖 5.3-9 台灣大道公車專用道公車路口號誌延滯時間分佈圖 ... 100 圖 5.3-10 路口現場轉向流量攝影調查作業示範圖 ... 101
「號誌控制技術研究計畫(2/4)」研究報告 V 圖 5.3-12 竹北市光明六路-博愛路口上游依時累積機車流量型態比較圖... 104 圖 5.3-13 竹北市光明六路-博愛路口上游依時累積汽車流量型態比較圖... 104 圖 5.3-14 竹北市光明六路-博愛路口上游依時 PCUs 分佈型態比較圖 ... 105 圖 5.3-15 竹北市光明六路-博愛路口上游依時累積 PCUs 分佈型態比較圖 ... 105 圖 5.3-16 台中市台灣大道-惠中路口上游依時 PCUs 分佈圖 ... 106 圖 5.3-17 台中市台灣大道-惠中路口上游依時累積 PCUs 分佈圖 ... 106 圖 5.3-18 竹北市光明六路-博愛路口上午尖峰時段分佈圖(事前) ... 107 圖 5.3-19 竹北市光明六路-博愛路口上午尖峰時段分佈圖(事後) ... 107 圖 5.3-20 台中市台灣大道-惠中路口下午尖峰時段分佈圖 ... 108 圖 5.3-21 竹北市光明六路-博愛路口部份臨進路段停等車隊現況 ... 112 圖 5.3-22 台中市台灣大道-惠中路口部份臨進路段停等車隊現況 ... 113 圖 5.3-23 停等汽車隊長度調查作業示意圖... 113 圖 5.3-24 竹北市光明六路-博愛路口各轉向車道群汽車停等車隊依時分佈圖 ... 115 圖 5.3-25 台中市台灣大道-惠中路口各轉向車道群汽車停等車隊依時分佈圖 ... 116 圖 5.3-26 台中市台灣大道-惠中路口各轉向車道機車停等車隊依時分佈圖 ... 117 圖 5.4-1 以 PSO 作參數校估之流程圖 ... 119 圖 5.4-2 竹北光明六路-博愛路口示意圖 ... 120 圖 5.4-3 台中台灣大道-惠中路口示意圖 ... 123 圖 5.4-4 台中台灣大道-惠中路口示意圖 ... 125
表 目 錄 表 2.1-1 混合車流號誌最佳化模式變數對照表 ... 5 表 2.4-1 號誌最佳化軟體各項功能開發期程規劃 ... 30 表 3.3-1 推估機車專用道飽和流率公式 ... 53 表 3.3-2 推估機車專用道容量公式 ... 54 表 3.3-3 公車專用道設置條件 ... 55 表 5.2-1 各初勘路口幾何/交通/號控/週邊設施概況表 ... 90 表 5.3-1 竹北市光明六路-博愛路口 各臨進路段抽樣速率分佈表 ... 95 表 5.3-2 台中市台灣大道-惠中路口 各臨進路段抽樣速率分佈表 ... 95 表 5.3-3 各車種與轉向之 PCE 值參考表 ... 103 表 5.3-4 兩實測路口尖峰小時各臨進路段上游流入交通量統計表 ... 108 表 5.3-5 竹北市光明六路-博愛路口尖峰小時轉向交通量統計表(事前) ... 109 表 5.3-6 竹北市光明六路-博愛路口尖峰小時轉向交通量統計表(事後) ... 110 表 5.3-7 台中市台灣大道-惠中路口尖峰小時轉向交通量統計表 ... 111 表 5.4-1 將進行校估作業之參數 ... 118 表 5.4-2 竹北光明六路-博愛路口之參數設定 ... 120 表 5.4-3 博愛路南向路段之參數校估結果 ... 121 表 5.4-4 光明六路西向路段之參數校估結果... 121 表 5.4-5 博愛路北向路段之參數校估結果 ... 121 表 5.4-6 光明六路東向路段之參數校估結果... 121 表 5.4-7 竹北光明六路-博愛路口調整前後時制計畫 ... 122 表 5.4-8 台中市台灣大道-惠中路口之參數設定 ... 122 表 5.4-9 台中市台灣大道東向路段之參數校估結果 ... 124 表 5.4-10 台中市台灣大道西向路段之參數校估結果 ... 124 表 5.5-1 光明六路-博愛路口汽、機車停等績效統計表(事前;全期間) ... 126 表 5.5-2 光明六路-博愛路口汽、機車停等績效統計表(事後;全期間) ... 127 表 5.5-3 光明六路-博愛路口事前、事後汽/機車停等績效比較表(全期間) ... 128 表 5.5-4 光明六路-博愛路口汽、機車停等績效統計表(事前;尖峰小時) ... 129 表 5.5-5 光明六路-博愛路口汽、機車停等績效統計表(事後;尖峰小時) ... 130 表 5.5-6 光明六路-博愛路口事前、事後汽/機車停等績效比較表(尖峰小時) ... 131
「號誌控制技術研究計畫(2/4)」研究報告
第一章
計畫簡介
1.1 計畫背景與目的
交通建設為國家重大建設之一,整體的交通服務品質與國家之經濟成長、社會安全、文化發 展、國家安全等有密切的關係。交通部於推動與營運重大交通工程建設之同時,亦須有相關之交 通技術研發成果支持與配合;面對整體環境所衍生新的需求與挑戰,更應有長期推動交通技術相 關研究之系統性規劃,做為我國交通技術研究計畫之研發重點。期望將研究成果應用於未來,始 能更妥善管理各交通設施,並解決當今存在之交通問題。 台灣地狹人稠,公路運輸成為主要的旅運選擇,特別是都市型的短程運輸,汽、機車為絕大 多數民眾的主要運具選擇。加上我國交通具有許多異於國外的本土特色,包括快慢分隔的路型、 兩段式的機車左轉待轉區、機車專用停等區、公車數量大及路邊干擾大、慢車道及混合車道車流 混雜、駕駛不依車道等。這些皆會影響到交通績效,特別是影響到號誌設計的成效。多年來為了 改善都市交通擁擠的問題,提升交通系統效率,政府持續投入許多經費進行交通改善;其中為了 號誌改善更是投入許多經費,各縣市也陸續建立交控中心。過去台灣皆依賴國外的號誌控制軟體 來產生時制,也依賴國外的模擬軟體來進行評估。然而因國內針對機車而設計的機車專用道、機 車左轉待轉區、機車專用停等區等特殊幾何特性,國外所發展的號誌控制模式與軟體在使用上一 直有其適用性的疑慮。 民國 99 年至 102 年,交通部委託中華民國運輸學會完成四年期的計畫「交通技術研發與人才 培育規劃研究」。於第二年至第四年,著手調查、評估、規劃與建構適用於我國之車流模擬軟體, 並開發一混合車流之號誌控制最佳化軟體。其考慮到上述的機車行為、幾合特性,首先建立一套 在號誌控制路口下,符合國內路口汽機車等候、消散、轉向的混合運行數學模式,並提供一號誌 控制軟體雛形,供使用者操作。民國 103 年,交通部委託國立交通大學執行「號誌控制技術研究 計畫(1/4)」(以下簡稱「前期」)。旨在延續前四年期之成果,根據使用者回饋意見作軟體與模式 功能新增與強化。 本研究將延續第一期之成果,思考國內之交通特質並檢視現有號制控制軟體之適用性以及模 式之完備性,以軟體產品化之角度,針對前期之軟體、模式以及演算法做強化、改良及調校,進 而建立一套得以描述國內特有交通特質,且包含汽車與機車混合車流之號控模式,期能朝產品化 之方向,發展成一符合本土特色之號誌控制軟體。1.2 計畫內容與課題
根據前述之計劃背景與目的,茲將本計劃之工作內容條列如下: 1. 號控模式相關文獻與前期號控模式之回顧 針對獨立路口與幹道的混合車流號誌控制模式作文獻回顧,並加入前期中提出模式的回顧與 分析,進一步探討可新增與強化之功能,作為後續研究發展之基礎。2. 模式及演算法之改良 延伸前期研究之混合車流號控模式,擴展其適用性並設計對應演算法。 3. 使用者界面之改良 延伸前期之使用者介面,強化軟體功能與介面設計,提供使用者更方便的操作感受。 4. 期中審查 提送期中報告並進行期中簡報與審查,針對審查意見辦理審查意見回覆、報告修訂與研究工 作之調整。 5. 實測路口交通量調查與分析 針對測試路口作事前及事後調查分析,以了解改良模式之可用性。 6. 辦理說明會與教育訓練 說明本計畫軟體與模式發展成果,並提供所開發之軟體由各單位試用,藉以回饋與蒐集相關 使用者意見,作為後期計畫修訂之參考。 7. 期末審查 提送期末報告,並進行期末簡報與審查,針對審查意見辦理審查意見回覆與報告之修訂,最 後提交修訂後之計畫成果。
1.3 預期成果
本計畫之預期研究成果條列如下: 延續前期之混合車流模式,模式中包含上游抵達模式、車流推進模式、車道選擇模式、併入停等 模式以及車隊紓解模式等;並新增「機車專用/優先道」、「快慢分隔島」及「公車專用道」等功能。 1. 延續前期中所開發之求解演算法,使其能求解上述之號控模式,強化求解效率與品質,並能 處理路口過飽和之問題。 2. 延續前期中所開發之使用者介面,預計新增功能包含: (1) 調整軟體介面,使其可支援「機車專用/優先道」、「快慢分隔島」及「公車專用道」等情 況。 (2) 參數設定指引:新增「參數意義及介面查詢」以及「參數設定錯誤提醒」等功能。 (3) 本土化報表顯示及輸出。 (4) 提供 CLV 之計算結果。 (5) 新增績效指標:停等車輛數、停等次數、停等延滯及路網總延滯等。 3. 針對本期之模式進行實際路口測試,進行事前事後分析,以確認模式之可用性。 4. 辦理交通技術論壇、諮詢會議及教育訓練,並完成相關論文發表。「號誌控制技術研究計畫(2/4)」研究報告
第二章
前期研究成果回顧
2.1 混合車流號誌控制模式介紹
國內的交通特性和國外常見模式最大不同點在於機車之混合車流。前期研究當中,提出藉由 次車道構想,同時描述不同車種佔用道路面積大小、不同車道寬度、停等與移動車輛間距等更細 緻之車流行為。透過這種統一模式架構,得以在同一架構中描述多種不同車種行為(本研究將之 分為機車、小汽車以及大型車輛)。前期研究將路段上動態車流行為分成數個程序,分別為上游到 達程序、車道選擇程序、併入停等程序、車隊溢流阻擋程序、路口疏解程序、流量守恆以及目標 函式部分,如圖 2.1-1 所示。 圖 2.1-1 模式架構1. 上游抵達程序 (Arrival Process)及車流推進程序 (Propagation Process)
上游抵達程序係指車輛由上游路口進入本路段。傳統研究中,流入研究路段的車流,多 由路段上游路口所流入;然本研究將機車兩段式左轉的行為納入研究考量,因此流入研究路 段的車流,部分於路段上游路口所流入,兩段式左轉機車則會在研究路段下游路口直接進行 停等。進入路段上游端之車輛將會以路段之平均推進速率前進,並於推進所需之時間之後抵 達下游車隊尾端。
2. 車道選擇程序(Lane Choice Process)
本程序描述車流傳遞至停等車隊尾端前,選擇併入於何車道之行為。此計算程序計算各 車道併入車流量時,需考慮轉向比例、車道轉向限制以及現有的車隊長度。 (1) 機車部分 此程序當中有一隱含假設,機車會傾向於使用外側之車道。而此使用機率以一車道選擇 機率參數決定。 (2) 小汽車與大型車輛部分 在決定機車使用車道的比例後,將討論小汽車以及大型車輛車道選擇的行為。在此處, 小汽車暨大型車輛的車道選擇行為,假設車輛傾向於選擇停等車隊長最短的車道。因此,各 轉向車輛將傾向於各個轉向車道群組當中的最短的車輛,而使得各轉向車道群組中的各車道
之停等車隊總長一致。 3. 併入停等程序(Merge Process) 此程序描述車流傳遞至停等車隊尾端時,如何併入停等車隊之過程。本研究以次車道方 式描述車道,並藉由次車道方式描述不同車種於車道上之混合停等行為。各車種具有不同之 寬度與長度,結合次車道概念後,可描述同一車道上機車與小汽車得以併行,但大型車輛與 機車無法併行之現象。 (1) 機車併入虛擬車道部分 針對機車部分,首先計算該車道上得以與汽車併行之機車數量。其計算方式是計算該車 道上最短次車道與其餘次車道的長度差異,並將此長度差異除上機車車長,即可得到能併入 該次車道的機車數量。 (2) 其餘車種以及剩餘機車部分 所有併入車道之車輛,必須考慮停等車隊長度不得超過轉向車道長度之限制。因此,必 須計算剩餘之儲車空間長度,並將之轉換成各車種得以併入轉向車道之車輛數。 4. 車隊溢流阻擋程序 當車隊長度過長時,有可能會阻擋相鄰車道的併入停等車隊程序。舉例而言,當直進車 道上停等車隊長度超過左轉專用車道(灣)的長度時,左轉車輛將無法併入左轉專用車道, 並造成左轉車輛停止於直進車道上。此時,即便左轉專用車道有剩餘空間,左轉車輛依舊無 法進入使用。反之,當左轉車輛停等長度超過左轉專用灣時,將會造成停等車隊溢流至直進 車道,並阻擋直進車道的車輛移動 當車道溢流狀況發生時,溢流之車輛將阻擋到其他車道之車輛併入停等車隊的行為。如, 當左轉車道發生溢流時,溢流之車輛將停止於直進車道上等待進入左轉車道,因而造成直進 車道的車輛被阻擋。然而,不同車種之間的相互阻擋情況並不一致,不適合使用單一定值決 定阻擋與否。當溢流大型車停止於車道上時,將會阻擋小汽車以及機車的通行;但當溢流小 型車停止於車道上時,並不會完全阻擋機車的通行,僅會造成通過率的降低。由於溢流車輛 所造成的阻擋造成機車通過率降低的方式,前期研究以車輛寬度、車道寬度以及溢流車輛數 進行估計。 5. 路口紓解程序(Discharge Process) 本程序描述混合車流於路口紓解的狀況,進而說明停等車隊於綠燈時相時消散的行為。 本路口紓解程序考慮車道寬、車輛寬度以及不同車種的 time headway,並且與不同車種的混 合比例相關。因此,紓解率並非一定值,其最大值出現在純機車車流時,而最小值則是出現 於大型車輛車流上。車輛停等於車隊中時,相互之間僅會維持最小安全間距,但當車輛啟動 之後,所保持之安全間距較停等時大。故相同車道寬度所能夠通過之車輛組成與車輛數會有 所不同。前期研究所提出計算紓解率的方式,是將不同車種所佔用的道路面積以及其在同一 車道上可同時併行的數量納入考慮,依照比例進行分配。 6. 共用車道 當路口出現轉向共用車道的狀況時,因不同轉向間之疏解狀況會相互影響,其疏解的車 流特性與轉向專用道相比有明顯不同。車流模式將需要針對原模式作進行調整,包含:停等
「號誌控制技術研究計畫(2/4)」研究報告 計算等方面。 (1) 求解演算法 由於本研究所使用之數學模式較為複雜,無法使用傳統數學最佳化方式進行求解,在「交 通技術研發與人才培育規劃研究(4/4)」研究中曾提出一啟發式解法做為求解演算法。前期研 究中便以此啟發式演算法為基礎作強化。在求算初始解的部分,改用傳統的 CLV(Critical Lane Volume)算法,使其在出現因路口過飽和產生之殘餘車隊(residual queue)時仍能正常輸出結果。 另外調整演算法使其可針對半週期、雙週期不同時比的狀況下求解。 以下將混合車流號誌最佳化模式中所使用之變數,整理分列於下表中。
2.1.1 變數對照表
表 2.1-1 混合車流號誌最佳化模式變數對照表 描述路網幾何以及車輛特性之變數( )
1( )
, i - i 路段 i 之上/下游路段集合( )
two stage- i 路段 i 上兩段式左轉機車之上游路段m M i
( )
thru, left, right
路段 i 所含之轉向集合,以 M(i) 表示,包含直進、左轉以及右轉i m LG 路段 i 上轉向 m 之可用車道集合 Ji 路段 i 之長度 (公尺) , , i l max L 路段 i 上車道 l 之儲車空間 (公尺)
i 路段 i 上機車停等區之儲車空間 (輛)
i,l 路段 i 上車道 l 之次車道數量路段 i 上車道 l 車種 v 所能同時併排停等/行駛之車輛數 V scooter,car, bus
1,2,3
車種集合,包含機車(v 1
)、小汽車(v 2
)以及巴士(v 3
) v
車種 v 之平均車長 (公尺)m
vi 車種 v 於路段 i 上之行駛速率 (公尺/秒) hm,v i 車種 v 於路段 i 上轉向 m 之疏解車間時距 (秒)O
v 車種 v 與機車所佔用空間之比值 v k 車種 v 於超車時的容量折減因子 vWD
車種 v 所佔用次車道數量 巨觀車流模擬中描述車流動態行為之變數t
D
車流動態更新步階大小 (秒) T 模式考量之總時間長度 (時間步階數)t
時間步階[ ]
, e v E IN t eN 需求產生源 e 於時階 t 所產生車種 v 之車輛數「號誌控制技術研究計畫(2/4)」研究報告
m,v i t 路段 i 上車種 v 轉向 m 於時階 t 的轉向比例[ ]
, i arr v Q t 路段 i 上車種 v 於時階 t 抵達停等車隊尾端車輛數[ ]
, , i l arr v Q t 路段 i 上車種 v 於時階 t 抵達車道 l 停等車隊尾端車輛數[ ]
, 1 i swa Q t 路段 i 上機車於時階 t 併入機車停等區車輛數[ ]
, , i l pot v Q t 路段 i 上車種 v 於時階 t 期望併入車道 l 停等車隊車輛數[ ]
, , i l max v Q t 路段 i 上車種 v 於時階 t 能併入車道 l 停等車隊車輛數j
i,l t 路段 i 之車道 l 上摩托車於時階 t 時以並行於其他車種方式併入次車道之車輛數[ ]
, , i l sb v q t 路段 i 之車道 l 上車種 v 於時階 t 時併入次車道 sb 之車輛數V
vi t 路段 i 上車種 v 於時階 t 時由進口至車隊尾端的旅行時間[ ]
i L t 路段 i 上於時階 t 之各車道平均停等車隊長[ ]
, i l L t 路段 i 上於時階 t 之車道 l 停等車隊長[ ]
, i l S t 路段 i 上於時階 t 之車道 l 平均疏解率[ ]
, i l v S t 路段 i 上於時階 t 之車道 l 之車種 v 疏解率 Sm,v i,l t 路段 i 上於時階 t 之共用車道 l 之轉向 m 車種 v 疏解率[ ]
, i l v X t 路段 i 上於時階 t 之車道 l 停等車隊之車種 v 車輛數 路段 i 上於時階 t 之車道 l 停等車隊之車種 v 溢流車輛數[ ]
, , i l sb v x t 路段 i 上於時階 t 之車道 l 之次車道 sb 停等車隊之車種 v 車輛 數[ ]
, i l v D t 路段 i 上於時階 t 之車道 l 上疏解車輛數[ ]
, j i v DL t 由路段 j 前往路段 i 於時階 t 之車種 v 車輛數[ ]
, , i l sb v d t 路段 i 於時階 t 之車道 l 之次車道 sb 之車種 v 車輛疏解數[ ]
i v N t 路段 i 於時階 t 之車種 v 車輛數[ ]
, i l b t 描述路段 i 上車道 l 於時階 t 是否被阻擋之二元變數[ ]
, i l v tw
路段 i 之車道 l 上車種 v 於時階 t 的被阻擋率[ ]
, i l VL t 路段 i 之車道 l 上機車於時階 t 時得以併行於其他車種方式併入停 等車隊之空間「號誌控制技術研究計畫(2/4)」研究報告 E i,lwa t 描述路段 i 機車兩段式左轉待轉區是否有車輛待轉之二元變數 E i,swa t 描述路段 i 上機車停等區是否有車輛停等之二元變數 描述號誌控制之變數 gi,m
[ ]
t 描述路段 i 上之轉向 m 是否於時階 t 通行之二元變數 gn, p[ ]
t 描述路口 n 之時相 p 是否於時階 t 通行之二元變數 PMn,i 用以描述路段 i 上之轉向 m 是否被路口 n 之時相 p 所控制之關係矩陣 NC 模擬時間總長中所含之號誌週期數 , n p G 路口 n 時相 p 之時相長度 , n p I 緊接於路口 n 時相 p 後之時相轉換時間 n D 路口 n 的秒差 於求解演算法中所使用之變數 , , i m dir G 路段 i 上轉向 m 所需要增加之綠燈時間 , , n p dir G 路口 n 時相 p 之時相長度搜尋方向 , i mRQ
路段 i 上轉向 m 之平均每週期剩餘車隊長度增加率 , i m AVG S 路段 i 上轉向 m 於綠燈時間之平均疏解率2.1.2 巨觀車流模式架構
此混合車流號誌最佳化模式透過次車道構想,同時描述不同車種佔用道路面積大小、不同車 道寬度、停等與移動車輛間距等車流行為。此模式架構將目標路段,根據車流狀態分為數個程序, 如圖 2.1-2,分別為需求輸入與上游抵達、車流推進、車道選擇、併入停等車隊、停等車隊疏解以 及流量守恆等。 圖 2.1-2 模式架構圖2.1.3 上游抵達與需求輸入
此部分描述進入研究路段之車流動態狀況。過去研究中,路段的需求皆由上游路口或需求產 生源而來;本研究將機車兩段式左轉的行為納入考量,其會在研究路段的下游路口直接進行待轉, 如圖 2.1-3 所示。 圖 2.1-3 上游抵達模式示意圖 本研究中,進入路段之需求量可分為:(1)由路段端點之需求產生源 e 直接產生;(2)從上游 機車 兩段式 左轉 待轉區 機車 停等區 車流推進 併入停等 由上游抵達車輛 兩段式左轉 機車車流 停等車隊 停等車隊 停等車隊 停等車隊 溢流 阻擋 車道選擇「號誌控制技術研究計畫(2/4)」研究報告 若路段的端點為需求產生源,則其進入路段流量可由下式計算:
[ ]
[ ]
, i in e v v Q t IN t (2-1) 此方程式描述時階 t 由需求產生源 e 進入其連接之下游路段 i 之車種 v 流量。此外,從上 游路段離開並進入研究路段之需求量,可由各個上游之疏解車流加總而成:[ ]
[ ]
, , ( ) i in j i v v j i Q t DL t å
(2-2) 而兩段式左轉之機車,則會由兩段式左轉之專屬上游,直接抵達兩段式左轉待轉區。其方程 式如下:[ ]
[ ]
, , 1 1 ( ) two stage i lwa j i j i Q t DL t - å
(2-3)2.1.4 車流推進模式
車流推進模式描述車流抵達路段上游端入口後,推進至停等車隊尾端所需時間。此旅行時間 的計算方式是以旅行距離除以平均行駛速率計算而得,旅行距離的計算方式是將道路長度減去平 均停等車隊長度,而平均行駛速率則是隨車種、所在路段而有所不同。V
v i t (
J
i- Li t)
( )
m
vi -1 (2-4) 計算得到旅行時間後,車種v抵達停等車隊尾端的流量 , i arr v Q ,可用下列方程式計算: Qvi ,arr t Vv i t Dt Qvi,in t (2-5)2.1.5 車道選擇模型
本程序描述車流抵達停等車隊尾端之後,選擇併入於車道之行為。為了表現出道路上一般車 輛傾向於選擇併入停等車隊長度較短車道的行為,因此模式假設流量分配至各車道的比例,與各 車道當前停等車隊長度的倒數成正比。則車種v選擇併入車道l的車輛數可由下式表示:[ ]
[ ]
[ ]
(
[ ]
)
[ ]
(
)
1 , , , , , 1 , , i l i l arr i arr i i v v m v m i l l L t Q t Q t t l LG L t -æ ö ç ÷ ç ÷ ç ÷ èå
ø (2-6) 當路口上有機車停等區時,上述方程式在應用於機車時需要進行調整。模式假設直行機車會 優先併入機車停等區,因此到達停等車隊尾端的直行機車,須先扣除進入機車停等區的機車數量, 剩餘的機車才進行車道選擇。則描述直行機車的方程式修改如下:[ ]
(
[ ]
[ ]
[ ]
)
(
[ ]
)
[ ]
(
)
1 , , , , , 1 1 ,1 1 1 , , i li l arr i arr i i swa i
thru thru i l l L t Q t Q t t Q t l LG L t -æ ö ç ÷ - ç ÷ ç ÷ è
å
ø (2-7) 若路口規定機車需要進行兩段式左轉,則左轉機車的需求量也一併進入機車停等區,則方程 式修改如下:[ ]
(
[ ]
(
[ ]
[ ]
)
)
[ ]
(
[ ]
)
[ ]
(
)
1 , , , , , 1 1 1, 1, 1 , 1 , i li l arr i arr i i i swa i
thru left thru
i l l L t Q t Q t t t Q t l LG L t -æ ö ç ÷ - ç ÷ ç ÷ è
å
ø (2-8) 若路段含有為轉向共用車道(單一車道服務多個轉向),則選擇併入車道之車流需求計算亦需考 量多種不同的轉向需求。前期假設在共用車道狀態下,駕駛者除傾向選擇車隊長度較短的車道, 亦會選擇疏解率較高的車道。其車道選擇模式如下:(
)
(
)
1 , , 1 , [ ] [ ] [ ] i m i l i l i l l LG L t L t L t - å
[
]
[
]
[
]
, , , 1 1 1 i m i l i l i l l LG S t S t S t -- -å
[ ]
[ ]
[ ]
[
]
[
]
, , , , , , , , , [ ] 1 [ ] 1 i m i l i l i l arr i arr i m v v m v i l i l l LG L t S t Q t Q t t L t S t - - å
其中, Q, ,, [t]:路段 i 車種 v 轉向 m 於時階 t 抵達車道 l 停等車隊尾端車輛數 L,[t]:正規化後之路段 i 車道 l 於時階 t 之停等車隊長度因子「號誌控制技術研究計畫(2/4)」研究報告 此處使用之停等車隊長度L,[t],將採用考慮轉向共用車道特性後的停等車隊長度計算,如下 式所示: 其中, x, ,, [t]:路段 i 於時階 t 之車道 l 之次車道 sb 停等車隊之車種 v 轉向 m 的車輛數 X,, [t]:路段 i 於時階 t 之相鄰車道 l 停等車隊之車種 v 轉向 m 的溢流車輛數 另外前期考量到若是路段上有禁行機車道,車道選擇模型修改如下:
[ ]
[ ]
[ ]
(
[ ]
)
[ ]
(
)
1 , , , , , 1 , , , i l i l arr i arr i i v v m v m v i l l L t Q t Q t t l LG L t -æ ö ç ÷ ç ÷ ç ÷ èå
ø 其中,LG , 為路段 i 轉向 m 車種 v 可使用之車道集合。2.1.6 併入停等車道
當車輛根據其轉向需求選擇車道後,將會嘗試加入該車道上之停等車隊。此模式以次車道觀 念,描述機車於車道上並排停等之行為。各車種具有不同之寬度與長度,結合次車道概念後可描 述不同車種於車道上之混合停等行為。此次車道概念如圖 2.1-4 所示。 圖 2.1-4 虛擬車道概念示意圖 上圖中包含兩個車道,每個車道中各含有三個次車道。於模式中,次車道的寬度假設與機車 的寬度相同。小汽車與巴士所佔用的車道寬度,根據其實際體積,分別佔用兩個與三個次車道寬; 同時,假設小汽車與巴士會佔用最靠內側之次車道,而機車則是分散於各次車道上。併入停等車隊 – 機車部分模式 機車停等區設置於直行車道的尾端,可做為直行機車的停等區,其他車輛不得於停等時占用。 因此,當直行信號轉為紅燈後,僅有機車得以進入其區域。待機車停等區儲車空間被機車占滿後, 機車則會與其他車輛同時停等於直行車道上。併入機車停等區之機車數量可透過下列方程式計算:
[ ]
[ ]
[ ]
[ ]
(
[ ]
)
, , , , 1 min 1 ,1 , 1 1i swa i arr i i i swa i thru
thru Q t Q t t -X t -g t (2-9) 抵達車隊尾端的機車,扣除能進入機車停等區的車輛後,將會與一般車輛共同停等於車道上。 模式中假設機車會嘗試鑽行並且在車道寬度允許的狀況下,與一般車輛併排。模式將與一般車輛 併排的機車行為,稱為「虛擬車道」。由於除機車外,一般車輛並不允許於同一車道上並排,故, 除機車外車輛並無虛擬車道概念。本模式假設與一般車輛共同停等的機車,將會優先併入虛擬車 道。 「虛擬車道」儲車空間的計算概念為某一車道上之次車道間停等車隊長度差值,意味著以最 長的次車道停等車隊長度為基準,其他次車道停等車隊長度與其之差值,即為「虛擬車道」之儲 車空間。機車將以車道中最短之次車道做為「虛擬車道」,並且併入其中。當「虛擬車道」之儲車 空間占滿後,意味著所有次車道之停等車隊長度相同。此時,機車將沒有次車道偏好,而會分散 於其所選擇車道上之所有次車道中。 「虛擬車道」之儲車空間,可透過下列數學式計算:
[ ]
[ ]
[ ]
, max , , , , , i l i l sb i l i l sb v v v v sb v V sb v V VL t x t x t æ ö ç ÷ - èå
øåå
(2-10) 因此,與一般車種共同排隊的機車數量為 (2-11) 而併入「虛擬車道」之機車數量可由下列方式計算 (2-12) 併入停等車隊 – 一般車種部分模式 得以併入停等車隊的車輛數與 1)該車道上的儲車空間限制(如左轉專用儲車灣)以及 2)車道 是否遭遇鄰近車道停等車隊阻擋相關。無法併入停等車隊之車輛將會成為溢流車隊並停等於該車 道之外,這些溢流車隊以 Xv i,l t[ ]
表示。希望併入某一車道 l 的車流需求量,可由抵達車隊尾端 的車輛以及該車道之溢流車隊所表示,其數學式如下:「號誌控制技術研究計畫(2/4)」研究報告 Qv i,l , pot t Qv i,l ,arr t Xv i,l t (2-13) 而剩餘儲車容量可由儲車灣長度扣除停等車隊長度計算而得。剩餘儲車灣容量假設會按照各 車種抵達車輛數的比例進行分配,而這些分配之儲車空間則可透過車輛長度的方式轉換為可併入 之車輛數。
[ ]
[ ]
[ ]
(
[ ]
)
, , , , , , , , , 1 , i l pot v i l ma x i l max i l v i l pot v v v V Q t Q t L L t v V Q t - å
(2-14) 除了儲車灣容量限制外,遭受鄰近車道溢流車隊阻擋也是影響併入停等車隊車輛數的重要原 因。溢流車隊阻擋發生於 1)當某一車道的車隊長度超過臨近車道的入口(如直進車道上停等車隊 長度超過左轉專用道入口),以及 2)當轉向灣上停等車隊長度超過其容量後,溢流車隊將會停在 臨近車道上等待併入,並阻擋鄰近車道車流,如下圖 2.1-5 所示。 圖 2.1-5 溢流車隊停等示意圖 當轉向專用道停等車隊無法併入停車灣時,研究假設溢流車隊會停等於最臨近該停車灣的車 道上等待併入。舉例而言,當左轉專用灣上停等車隊溢流發生時,溢流車隊會停在最內側的直進 車道等待並入左轉專用灣。而當直進車道上停等車隊長度超過左轉專用灣入口時,左轉車輛將被 阻擋於左轉灣外,並且停留在最內側直進車道上。車道是否被阻擋,可由下列數學式計算:[ ]
[ ]
, ' , ,max , 1, 0, i l i l i l if L t L b t otherwise ì (2-15) 為了決定車道是否被停等車隊阻擋,必須計算停等之實體長度。而此實體停等車隊長度與停 等於某一車道上車隊以及停等於該車道上的鄰近車道溢流車隊相關。其計算方式如下方程式: 直進 直進 直進 直進 左轉 左轉 左轉 左轉 直進 直進 直進 直進 直進 直進 直進 右轉 右轉 右轉 左轉 左轉(2-16) 當車流遭遇阻擋時,不同車種之阻擋情況並不相同。小型車會被停等於車道上之其他小型車 輛或巴士阻擋,但機車遭遇小型車阻擋時,將能夠於同一車道上穿越。此模式假設機車車流被阻 擋時所減少的通過率,與其行駛車道寬度被停等車隊佔用的寬度相關。舉例而言,當機車所併入 之車道寬度為三個次車道寬,而有一台小汽車(兩個次車道寬)停等於其上時,機車的通過率會 成為原本的三分之一。此外,當阻擋該車道的車隊長度小於一台車時,其阻擋機率與車輛數成等 比。 因此,機車的阻擋率透過下列數學式表示: (2-17) w1i,l t min k3i,l t W i,l - WD2 Wi,l k2 i,l t æ è ç ö ø ÷ , 1 ì (2-18) 而其他車種的阻擋率,由於其不得並行於同一車道上,因此阻擋率以下列數學式表示:
[ ]
(
[ ]
[ ]
)
, , , 3 2 min , 1 i l i l i l v t t t w k k (2-19) 想要併入某一車道上停等車隊的車輛數,不僅包含抵達車隊尾端的車輛數,亦包含想要併入 該車道的溢流車隊。因此,於時間 t 時想要併入車道 l 的車輛數為: Qv i,l , pot t Qv i,l ,arr t Xv i,l t , v V \ scooter(
)
(2-20) 同時,根據停車空間的限制,可計算得到受儲車空間限制的併入車輛數為:[ ]
[ ]
[ ]
(
[ ]
)
, , , , , , , , , 1 , i l pot v i l ma x i l max i l v i l pot v v v V Q t Q t L L t v V Q t - å
(2-21) 在考量停等空間限制以及溢流車隊阻擋後,得以併入車道 l 上停等車隊之車輛數可表示為:[ ]
[ ]
[ ]
(
[ ]
[ ]
)
, , , , ,max , , min , 1 i l i l pot i l i l i l v v v v Q t Q t Q t -w t b t (2-22)「號誌控制技術研究計畫(2/4)」研究報告
2.1.7 車隊疏解模式
混合車流疏解情況與單一車種車流不相同,其疏解狀況隨不同車種車流之混合情況而改變。 個別車種有其專有之疏解率,而混合車流之疏解率則是由混合於車流中的車種組成計算而成。混 合車流疏解率的計算是基於車流中各車種的個別疏解率以各車種車輛數為權種加權平均而得。 停等的車輛之間會維持最小安全間距,但當車輛移動時,此安全間距(包含橫向以及縱向)將 會增加。因此,同一車道上能夠併行行駛的車輛數與併行停等的車輛數不同。 在同時考慮各車種疏解率、佔用道路空間以及疏解車隊中車輛數後,該混合車種平均疏解率 的計算可由下列數學式計算而得: (2-23) 個別車種疏解率的計算基於混合車流疏解率,以個別車種於疏解車流中數量分配而得: Svi,l t Si,l t Xv i,l t Xvi,l t vå
(2-24) 兩段式左轉待轉區以及機車停等區疏解 兩段式左轉待轉區中停等的機車,會與該臨近路段之直進綠燈同時疏解。因此,路段 i 上的 機車兩段式左轉待轉區停車隊疏解,可由下列數學式表示:[ ]
[ ]
[ ]
(
)
( )
1[ ]
, , , , , 1 min 1 1 , 1 1i lwa i lwa i lwa i lwa i thru
D t Q t X t P h - g t (2-25) 機車停等區中的機車車隊,亦受直進綠燈控制。然而,其停等車隊疏解,需待機車左轉待轉 區中車輛疏解後,才可進行。因此,此模式引入一二元變數,決定機車兩段式左轉待轉區是否處 於空閒狀態:
[ ]
[ ]
, , 1, 1 0 0, i lwa i lwa if X t E t otherwise ì (2-26) 故,機車停等區的疏解車流同時考慮綠燈以及機車左轉待轉區停等車隊後,可得為:[ ]
[ ]
[ ]
(
)
( )
1[ ]
[ ]
, , , , , , 1 min 1 1 , 1 1i swa i swa i swa i swa i thru i lwa
D t Q t X t P h - g t E t (2-27)
由於號誌顯示直進綠燈時,沒有機車能夠併入並停等於機車停等區上,因此疏解率的計算式 中,並不包含併入停等車隊的機車。
車道上混合車流疏解 對於車道上的車輛(同時包含機車、小汽車以及巴士)疏解率可由
[ ]
[ ]
, , i l i m v S t g t 計算,而總需 求可表示為Qv i,l t[ ]
Xvi,l[ ]
t 。因此,路段 i 於時間 t 時於車道 l 的疏解可用下列數學式表示:[ ]
[ ]
[ ]
[ ]
[ ]
, , , , , min , , , , i l i l i l i l i m v v v v m D t Q t X t S t g t lLG m left right (2-28) 然而,由於機車停等區設置於直進車道末端,因此,上列數學式應用於有設置機車停等區的 路口時,需改寫為下式:[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
, , , , , , min , , i l i l i l i l i m i swa v v v v thru D t Q t X t S t g t E t lLG (2-29) 其中[ ]
[ ]
, , 1, 1 0 0, i swa i swa if X t E t otherwise ì (2-30) 這些疏解的車輛,會前往其相對應的下游路段。因此,由路段 i 前往方向 m 的下游路段 j 交 通量,可由屬於轉向 m 的所有車道疏解量加總而成:[ ]
[ ]
( )
, , , 1 m i j i l v v m l LG DL t D t j - i å
(2-31) 上式應用於有設置機車停等區及機車左轉待轉區的路口時,直行方向機車疏解量應加入左轉 待轉區及機車停等區的疏解量(式 2-25 與 2-27),如下:[ ]
[ ]
[ ]
[ ]
( )
, , , , 1 1 1 1 1 , thru i j i l i lwa i swa thru l LG DL t D t D t D t j - i å
(2-32)2.1.8 流量守恆
本小節當中將羅列上述各車流狀態間的流量守恆式。由於此模式巨觀車流模式引入次車道概 念,因此流量守恆計算式需將車道流量轉為次車道流量以進行說明。 對於併入車道的機車而言,由於其能於同一車道上並排,故於巨觀模擬中,使其能分散於各 個次車道上:[ ]
(
)
1[ ]
, , , , , 1 1 1 , 1, 2,..., 1 i l sb i l i l i l q t P - Q t sb W (2-33)「號誌控制技術研究計畫(2/4)」研究報告 示為:
[ ]
[ ]
, , , , 1, 2,..., i l sb i l v v v q t Q t sb W (2-34) 以同樣觀念能將疏解車流量表達為:[ ]
[ ]
, , , , 1, 2,..., i l sb i l v v v d t D t sb W (2-35)[ ]
(
)
1[ ]
, , , , , 1 1 1 , 1, 2,..., 1 i l sb i l i l i l d t P - D t sb W (2-36) 某一路段內的車輛數,可由路段上游流入與下游流出計算更新如下:[
]
[ ]
1 , , ( ) ( ) 1 i i j i i j v v v v j i j i N t N t DL DL - å
-å
(2-37) 次車道上的車隊長度,同樣可由其流進與流出計算。機車併入某一次車道的車流,包含有併 入虛擬車道車流(併入已經停等之其他車種旁)和與其他車種同時抵達併入停等車隊車流:[
]
[ ]
[ ]
[ ]
[ ]
, , , , , , , , , , 1 1 1 1, 1 1 i l sb i l sb i l sb i l sb i l sb VL x t x t q t q t -d t (2-38) 除機車外,其他車種可表達為[
]
[ ]
[ ]
[ ]
, , , , , , , , 1 i l sb i l sb i l sb i l sb v v v v x t x t q t -d t (2-39) 對於機車停等區中的機車,則可由下列數學式計算[
]
[ ]
[ ]
[ ]
, , , , 1 1 1 1 1i swa i swa i swa i swa
X t X t Q t -D t (2-40) 故,於車道上總停等車輛數可由該車隊所包含之次車道中停等車輛計算而得: Xvi,l t xv i ,l ,sb t , v V \ scooter (2-41)
[ ]
[ ]
, 1 , , , 1 1 i l i l i l sb sb SB X t x t å
(2-42) 最後,溢流車隊長度可由下列數學式更新 Xv i,l t 1 Qv i,l , pot t - Qv i,l t (2-43)2.1.9 號誌最佳化模式
幹道的號誌最佳化模式可以藉由 2.1.2-2.1.8 小節中所描述的的巨觀混合車流方程建立。這個 號誌最佳化模式將在給定時相設計與順序的狀況下,求解每個路口的最佳週期、時比以及續進秒 差。 此模式的主要目標是使所有在控制範圍中的車輛的總延滯最小,本研究假設各路段、各車種 的總延滯具有相同的權重。而此控制目標可藉由下式描述: Min X,[t] + X,[t] ∆t (2-44) 此模式的控制變量包含有號誌週期、時比以及各路口秒差。為了實務可行性,亦加入了對於 控制變量的限制式。包含有最大/最小週期、各路口 n 上時相 p 的最短綠燈時間,以及時相轉換 時間等,分述如下: , min max CC CC (2-45) , , n p n p MIN G G , , n p G C (2-46) , , n p n p p G I Cå
(2-47) 數學式 (2-45) 限制最大/最小週期長度、數學式 (2-46) 限制所求得各時相長度需大於所給定 之最小綠燈時間長度,並小於週期長度、數學式 (2-47) 限制各時相長度與時相轉換時間的總和需 等於週期長度。 此號誌控制最佳化模式之輸入變數包含週期、時相長度以及路口秒差等,透過路段轉向綠燈 與否和前述混合車流模擬進行結合。其輸入方式為:[ ]
(
)
(
)
(
)
1 1 , , , , , , 1 1 1, mod , 0, p p n j n j n n j n j n p n p j j if G I t C G I G g t otherwise - - ì D å
å
(2-48) 和 gi,m[ ]
t gn,p[ ]
t PMn,i (2-49) 式(2-48)計算時間 t 時,各路口 n 是否屬於時相 p 。而數學式 (2-49) 則是將路口 n 之時相 p 時間轉換為路段 i 之轉向 m 於時間 t 是否可通行。前期調整模式使其適用於半週期的路口。 令C 為路口 n 的週期長度,N 與N / 分別表示使用全週期與半週期的路口集合。則原(2-45)至 (2-48)式調整如下: min n max C C C (2-45’)「號誌控制技術研究計畫(2/4)」研究報告 , , n p n p MIN n G G C (2-46’) , , n p n p n p G I C
å
(2-47’)[ ]
(
)
(
)
(
)
1 1 , , , , , , 1 1 1, mod , 0, p p n j n j n n j n j n p n n p j j if G I t C G I G g t otherwise - - ì D å
å
(2-48’) C = C/2, n ∈ N / C, n ∈ N (2-50) 前期亦針對「雙週期不同時比」之狀況調整模式。藉由引入新變數G , 與G , ,分別表示路口 n 前半週期與後半週期,時相 p 的長度;I , 及I , 則表示前半週期與後半週期的時相轉換時間。 則式(2-46’)至(2-48’)可以修正如下: , , , 1 , 2 n p n p n p MIN n G G G C (2-46’’) , , , n p n p n C p G I C n Nå
(2-47’’) , , / 2 , , {1, 2} n p n p q q n C p G I C n N qå
[ ]
(
)
(
)
(
)
1 1 , , , , , , 1 1 1, mod , , 0, p p n j n j n n j n j n p n n p j j C if G I t C G I G g t n N otherwise - - ì D å
å
(2-48’’)[ ]
(
)
(
)
(
)
(
)
(
)
(
)
1 1 , , , , , 1 1 1 1 1 1 1 , 1 1 / 2 , , , , , 2 2 2 2 2 1 1 1, mod , , or mod , 0, p p n j n j n n j n j n p n j j n p p p C n j n j n n j n j n p n j j if G I t C G I G g t n N G I t C G I G otherwise - - - - ì D D å
å
å
å
因此,此號誌控制最佳化模式,可總結為: ) 49 2 ( ) 45 2 ( ) 43 2 ( ) 1 2 ( . . ]) [ ~ ] [ ( min , , -å å å å
and Equations t s t X t X t i v l l i v l i v2.2 混合車流號誌控制模式評估
此混合車流號控最佳化模式延伸自前期所建立之模式架構,係結合以巨觀車流模式
(macroscopic traffic flow)與車道群組(lane-group)觀念,以一啟發式解法進行求解。前期研究已擴充
原混合車流模式部分功能,如「共用車道」、「禁行機車」、「半週期/雙週期不同時比」等。
前期針對混合車流號控模式提出兩種方式求解:粒子群演算法(Particle Swarm Optimization) 以及改良之啟發式演算法。粒子群演算法雖可提供可行解,但要取得良好之求解結果需要較大量 的演算次數,進而使演算時間增長。同時並無法保證所求得解之品質,在某些狀況下,可能會收 斂至較不穩定的週期與時比。啟發式解法速度較基因演算法快、且其求解品質較穩定。在求算初 始解的部分,改用傳統的 CLV(Critical Lane Volume)算法,使其在因路口過飽和出現殘餘車隊 (residual queue)時仍能正常輸出結果,並減少運算時間。然而本啟發式算法在作區域搜尋法時較耗 費計算時間,本期研究擬將針對此部分進行討論與強化。 前期之號誌最佳化模式構建於巨觀車流模擬觀念上,因此有許多巨觀車流參數與變量在使用 時需要進行蒐集與分析。這些參數可以歸納為交通需求參數、路網幾何參數以及動態車流參數, 茲分別討論於下: 1. 交通需求變數 交通需求變數包含有目標路網之邊界上交通需求,包含大型車、小型車以及機車之交通需求, 並且包括各路口之轉向需求。這些變數是模式最主要之輸入變量,需於使用此模式時,經由路口 調查或者是車輛偵測器資訊取得。 2. 路網幾何參數 路網幾何參數用以描述目標路網的幾何特性,包括有路口數、路段長度、車道群組、車道數、 車道轉向設定、機車停等區儲車空間大小、路段上下游關係等,各種幾何參數。這些參數將會影 響路段績效指標,例如單一路口上多個直進車道可於同一時間內紓解較單一直進車道更多的車輛 數。這些參數可以很簡單的由路口調查取得,且準確度極高。 3. 動態車流參數 動態車流模式藉由車流參數決定路網上之動態行為,包含有汽機車紓解率、車流推進程序之 自由車流速率等。汽機車紓解率參數將會影響綠燈時間所能通過之車輛數,進而影響在同樣需求 下所需要之綠燈時間。車流推進程序之自由車流速率,將會影響車輛行駛於道路上所需之時間, 進而影響號誌時制之秒差。汽機車紓解率的調查可透過路口觀察記錄,取得該路口之最大通過量, 以作為紓解率;自由車流速率亦可於路段上實際觀察而得。
2.3 前期軟體介面概述
2.3.1 系統架構
軟體程式區分為核心程式及軟體操作介面程式二部分。使用者透過軟體操作介面進行各項交「號誌控制技術研究計畫(2/4)」研究報告 核心模式運作執行後,由核心程式自動讀取設定輸入檔,並開始進行最佳化求解演算,在產出最 佳化輸出檔後,軟體操作介面程式再自動讀取核心程式所產出之最佳化輸出檔,並將分析結果與 績效等呈現於操作圖面上。系統架構概念流程如圖 2.3-1 所示。 圖 2.3-1 號誌最佳化軟體功能層次結構
2.3.2 軟體輸入及輸出介面功能
前期將軟體程式問題部分進行修正調整外,亦針對軟體存/讀檔、匯入底圖、時空圖、半週期 與全週期模式、旅行時間/總通過量指標等功能進行開發。軟體介面開發成果彙整說明如下。 1. 「禁行機車」設定功能, 如圖 2.3-2 圖 2.3-2 「禁行機車」設定功能 2. 「全週期與半週期」設定功能,如圖 2.3-3圖 2.3-3 「全週期與半週期」設定功能
3. 「存/讀檔功能」功能,如圖 2.3-4
「號誌控制技術研究計畫(2/4)」研究報告
4. 「回復上一步」操作功能,如圖 2.3-6
圖 2.3-5 「回復上一步」操作功能
5. 「匯入底圖」操作功能,如圖 2.3-6
6. 「時空圖與綠寬帶分析」功能,如圖 2.3-7
圖 2.3-7 「時空圖與綠寬帶分析」功能
7. 「績效-Throughput 顯示」與「績效-Travel time 顯示」功能,如圖 2.3-8
「號誌控制技術研究計畫(2/4)」研究報告
2.4 需求訪談摘錄與軟體功能開發規劃
前期參與軟體需求訪查之單位包括:基隆市政府(交通旅遊處交通工程科)、台北市政府(交通 管制工程處)、新北市政府(交通處交通管制工程科)、桃園縣政府(交通局交通工程科)等單位之實 際操作人員(邀請委外顧問公司人員共同參與討論)。需求訪談內容主要包含四個議題,結果分別 摘錄如下: 1. 對於相關號誌最佳化軟體之使用經驗與了解程度 (1)使用過的相關號誌最佳化軟體及使用時間長度 在各訪談單位中,以使用過 SYNCHRO 的經驗最為豐富,包括台北市、基隆市、桃園 縣等縣市政府,其使用時間大致都超過 5 年以上,另其亦有使用過 THCS,使用時間大致 2-5 年,僅新北市受訪者以使用過 Transty-7F 為主,使用時間約為 2-3 年。 (2)在軟體使用經驗上,初學者上手程度評分(1-5 分) 在 SYNCHRO 軟體使用上,受訪者均表示其操作介面相對簡便,容易上手,給予 3-4 分;而 THCS 軟體部分,因不是圖形化視窗,且需搭配手冊才知道如何進行設定,需花費 較多時間,給予 2 分;另 Transty-7F 操作畫面亦不很直覺,需花多一點時間學習,但其模 式計算出之結果較符合實際結果,故給予 2 分。 (3)各軟體符合實際需求的項目內容 以 SYNCHRO 軟體而言: A.操作介面友善,包括圖形化介面(匯入底圖功能)、分頁管理與顯示方式(參數設定)等,視 覺上很直覺,操作很簡便。 B.提供 Simtraffic 模擬功能,可透過模擬結果的呈現,初步檢視分析環境參數設定之正確 性,並進一步有利於針對分析環境之參數進行校估。 C.可輸出多元績效指標,至少包括路口整體平均延滯及服務水準、路網延滯等,其它績效 尚有節能減碳績效、等候長度等,符合實務上計畫之方案比較需求。 D.模式部分,提供週期、時比、時差等最佳化分析,另有提供不同週期結果供使用者選擇, 方法多元,符合求解需求。 E.其它 (a)利用車道群概念進行時相組合,符合台灣複雜時相需求,不易產生設定上的侷限。 (b)可調整的參數很多,有利於進行路網的校估。 (c)具有時空圖功能,以利調整綠燈續進帶寬。 以 Transty-7F 軟體而言,其模式計算出之結果,相較 SYNCHRO,較符合實際結果。 (4)各軟體不符合實際需求或需改進的項目內容 以 SYNCHRO 軟體而言: A.模式運算沒有考慮機車流量功能,無法反應國內特殊混合車流狀況,機車流量需經過處 理與轉換後,才能使分析環境與現況環境數據相近。 B.模式中車流透過轉向因子調整方式運算,左轉車流極易受限於對向直行車流影響,較無 法反應現實機會左轉行為,常出現左轉延滯狀況易與現況情形不符問題。C.各項參數與資料皆以表格方式輸入,不易與路口方向對應,很容易造成輸入數據誤植。 D.較複雜之道路幾何設計,如快慢車道分隔,無法構建。 E.其它 (a)沒有針對公車停靠站影響之分析 (b)僅有針對行人衝突量之參數設定,沒有更深入之分析結果。 以 Transty-7F 軟體而言: A.對於 4 叉路以上路口,需透過想像路口方式,針對多出的叉路以填表格方式進行各項參 數設定。 B.模擬驗證需要較複雜程序。 C.應可增加圖形化 UI。 D.應可增加機車分析功能。 2. 對於前期號誌最佳化軟體之使用經驗 (1)對於前期號誌最佳化軟體使用目的 在各訪談單位中,台北市、基隆市、桃園縣等縣市政府使用前期號誌最佳化軟體之目的, 主要均為時制重整計畫所需,包括進行單一路口及幹道最佳化分析。而新北市以測試為主。 (2)依實務需求,前期號誌最佳化軟體最需改善的項目 (數字表示有提出相同內容的單位數) A.最佳化之績效分析結果呈現方式過於零散,不易與現況績效值或其它方案做比較,在目 前時制計畫重整案中,該軟體目前產出之績效值用不上,建議以路口每方向(或 Approach)、 單一路口、幹道或整體路網之績效統計結果,或提供其它較易於判斷服務水準及有利於 進行現況調查資料校估的績效值。(3) B.軟體穩定性及效率不足,常跑一跑就當機或分析很久,應加強測試及確認原因。(3) C.目前無法明確了解各參數的意義,其設定如何影響分析結果。(2) D.無存檔、匯入底圖等功能,在測試上及路網建置上較不方便。(1) E.參數設定上的問題,建議應改善 (a)可調整之參數太少,不利分析環境的校估。(1) (b)參數設定錯誤或不完整,系統不會主動提醒。(1) (c)T 型路口,如為單行道,無法設定左右轉共用車道。(1) (d)流量設定參數不要有預設值,以免輸入時疏忽造成分析錯誤。(1) (e)部分路口有行人穿越考量,應提供最低時比限制。(1) F.分析結果上的問題,建議確認原因並改善 (a)分析出之最佳化綠燈秒數與時差,有時會出現負值或很大數值。(1) (b)分析出之最佳化結果中,其各時相之時比秒數相加後與總週期不相等。(1) (c)T 型路口刪除其中一方向後,無法進行分析。(1) (d)時相或路型較複雜之設定(圓環、共用車道),常造成軟體錯誤無法執行。(1) 3. 依實務上需求,認為現階段本研究號誌最佳化軟體最需新增的功能(數字表示有提出相同內容 的單位數) (1)增加檔案儲存。(4)
「號誌控制技術研究計畫(2/4)」研究報告 (3)加強績效的產出,或提供其它易於判斷服務水準及有利於進行現況調查資料校估的績效值, 並以路口每方向(或 Approach)、單一路口、幹道或整體路網之績效統計結果呈現。(3) (4)針對參數設定部分,增加指引或說明(或用顏色顯示那些一定要設定)。(3) (5)提供幹道續進寬帶分析結果(時空圖)。(2) (6)增加行人參數考量(或可進行最低時比限制)。(2) (7)增加汽車專用道、機車專用道、機車優先道之分析。(2) (8)增加車流模擬觀察介面。(2) (9)增加異常訊息與原因之對照表。(1) (10)開發路網分析模式。(1) 4. 依實務上需求,認為未來本研究號誌最佳化軟體最需新增的功能(數字表示有提出相同內容的 單位數) (1)增加車流模擬觀察介面。(2) (2)增加汽車專用道、機車專用道、機車優先道之分析。(1) (3)增加公車專用道之分析(1) (4)可依使用者不同設計目標,提供不同績效指標選擇(例如處理過飽和交通狀況,設計目標應 為總通過量最大,而非延滯最小)。(1) (5)依據使用者需求,提供不同運算模式選擇。(1) (6)針對參數設定部分,提供指引或說明,並加強教育訓練及相關學習方式。(1) (7)增加更多績效指標,例如停等長度、旅行時間等。(1) (8)增加底圖匯入等功能。(1) (9)增加複雜路口設定考量,例如圓環、連鎖路口等。(1) 由前述針對各單位之需求訪談結果,可了解各使用者對於目前號誌最佳化軟體在實際操作上 之改善意見與對未來軟體發展的期許。綜整需求訪談結果看來,各單位及使用者目前對於號誌最 佳化軟體開發與設計方向係持正面看法,多數認為各操作介面以圖形化方式表現很直覺,可降低 初學門檻,模式上考量汽機車混流行為,符合國內車流特性。然而以實際使用上而言,現階段之 軟體開發狀態仍還有許多需改善與加強之處,最主要意見包括: 1. 對於使用上,最重要的是分析結果能產出,因此,應強化軟體與模式分析結果產出之效率性、 穩定性及準確性(包括現有各項設定錯誤的檢測),並盡可能提供較多可調整之參數,以利實 務上進行分析環境的調校。 2. 在最佳化分析結果實際執行前,需透過績效指標比較過程以進行方案的評估,及了解是否達 到改善目標,因此,績效指標除了多樣性外,應加強著重績效指標呈現的實用性,例如以提 供較綜合性的方式呈現,才能便利於進行方案比較。 3. 可強化軟體的操作指引、說明、錯誤訊息資訊或查詢等功能,讓使用者於操作過程中遇到問 題時,可自行進行初步排除。 4. 軟體部分基本功能應建立,包括檔案儲存/開啟、底圖匯入、時空圖等。 5. 增進複雜路型或時相的分析,包括行人時相、汽車專用道、機車專用道、機車優先道、連鎖 路口、公車專用道、圓環、路網等。 依需求訪查結果及投標需求文件,團隊將軟體各項功能開發時程表整理如表 2.4-1。