國立交通大學
土木工程學系碩士班
碩士論文
時域反射頻率域相位速度分析法應用於 TDR 含砂濃
度量測技術之改良
Improved TDR Suspended Sediment Concentration Measurement By Frequency Domain Phase Velocity Method
研究生:張智棟
指導教授:林志平 博士
時域反射頻率域相位速度分析法應用於 TDR 含砂濃
度量測技術之改良
Improved TDR Suspended Sediment Concentration Measurement By Frequency Domain Phase Velocity Method
研究生:張智棟 Student: Chih-Tung Chang
指導教授:林志平 博士 Advisor: Dr. Chih-Ping Lin
國立交通大學 土木工程學系碩士班
碩士論文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
for the Degree of Master
In
Civil Engineering July 2009
Hsinchu, Taiwan, Republic of China
時域反射頻率域相位速度分析法應用於 TDR 含砂濃度量測
技術之改良
學生:張智棟 指導教授:林志平 博士 國立交通大學土木工程學系碩士班 中文摘要 含砂濃度觀測為河川輸砂及水庫排砂一重要參考指標。時域反射法(Time Domain Reflectometry , TDR)應用於含砂濃度觀測具有經 濟、維護性、高濃度觀測、不易受鹽度及粒徑大小影響等特性,符合 現今含砂濃度觀測需求。前期 TDR 含砂濃度觀測分析方法研究已將 含砂濃度量測精度提升至約 1500 ppm,但前期方法皆建立於時間域 分析,易受外在雜訊干擾。最近相關研究提出新式頻率域相位速度分 析方法,透過頻率域之分析方法可避免雜訊的干擾,大幅提昇量測穩 定性及其便利性,但此分析方法目前僅在數值模擬驗證階段,並無實 驗證明其適用性。 因此本研究目的為基於頻率域相位速度分析法進行 TDR 含砂濃 度量測技術之改良,探討此分析方法的適用性。實驗結果顯示頻率域 相位速度分析法應用於含砂濃度量測,不受水質鹽度、纜線長度以及 泥砂種類影響。另本研究配合頻率域相位速度分析法研發一新式同軸
感測器,其量測精度維持一致,且又具有不受雜物干擾的優點。現場 測試也證明新式訊號分析方法配合新式同軸感測器於現場量測的穩 定性。唯現場測試發現量測結果之變異與 TDR 主機周圍溫度有關, 推測為 TDR 主機擷取時距(sampling interval)有溫度效應進而影響泥 砂濃度量測準確度,建議未來進一步探討該溫度效應並提出修正方 法。 關鍵字:含砂濃度、時域反射法、頻率域相位速度分析法
Improved TDR Suspended Sediment Concentration Measurement By Frequency Domain Phase Velocity Method
Student: Chih-Tung Chang Advisor: Chih-Ping Lin ph.D
Abstract
Due to the complex geology and rapid weathering changes in Taiwan, suspended sediment concentration (SSC) measurement is important for sediment discharge and desilting operation in reservoirs during heavy rainfalls.. Time domain reflectometry method (TDR) has been developed recently for SSC monitoring with advantages of economy, maintainability, high SSC monitoring, and relative independence of water salinity and particle size. According to the previous study, TDR SSC measurement accuracy has been improved to 1500 ppm. However, the algorithm for estimating SSC of the existing TDR SSC method utilizes time domain analysis, thus the in-situ SSC monitoring results are often interfered by electronic and environmental noise. To avoid the effect of noise in the time domain analysis, a new frequency domain algorithm called the Frequency Domain Phase Velocity (FDPV) method was recently proposed.. But the proof of concept for the FDPV method was only performed with numerical simulations without experimental verification.
Consequently, the objective of this study was to implement the Frequency Domain Phase Velocity (FDPV) method and experimentally investigate its performance for TDR SSC measurement. Experimental results show that SSC measurement based on the FDPV method is
relatively independent of water salinity, cable resistance, and sediment type. Furthermore, this research developed a new TDR SSC coaxial probe, to go along with the FDPV method which provides higher measurement stability in-situ. The applicability of the FDPV method and new coaxial probe was also verified by field testing. However, some measurement variation with air temperature was revealed in the field testing. The temperature effect was attributed to temperature dependency of the sampling interval in the TDR device. Further study is suggested to investigate the temperature effect and compensation method.
Key words: Suspended Sediment Concentration (SSC), Time Domain Reflectometry (TDR), Frequency Domain Phase Velocity Method
誌謝 本論文得以順利完成,首先感謝恩師 林志平教授平日對我的指 導與提攜,亦師亦友,除了在學業上的指導之外,在待人處事及做研 究應有的態度方面也讓我獲益良多,在此致上萬分謝意。 在學期間,承蒙 方永壽博士、 潘以文博士、 廖志中博士、 單 信瑜博士,於課業、研究與生涯規劃上的指導與建議,使得學生受益 良多,在此獻上萬分感謝。 論文口試期間,承蒙經濟部水利署 謝勝彥副署長、 陳春宏課 長、成功大學資源工程系 余騰鐸教授與交通大學 鐘志忠博士,對於 本論文提供諸多非常寶貴之意見,使得本論文更臻完善,在此表達由 衷謝意。 研究期間,幸蒙志忠、俊宏、浚昇、岳勳及瑋晉學長的協助,尤 其感謝志忠學長,在研究實驗及論文撰寫上提供相當寶貴的意見與建 議,在此表達由衷的感謝;同時感謝同學永政及哲毅,在我最需要幫 忙的時候鼎力相助,我不會忘記與你們上山下海,同甘共苦的這些日 子;此外,感謝學弟妹玉紋、儒錚及子奕平常的幫忙。 感謝大地組同窗兩年的伙伴及學長,潘門佩錞、里泉、偉欽、國 維,廖門俊文、炳宏,黃門彥琅、意婷、瑞陽,方門聖峯、奕蓁、柏 碩,有你們的相伴,讓我這兩年的求學增添許多色彩,在此致上最真
誠的謝意。 最後,感謝父母對我的栽培及時常的關心,也謝謝妹妹平日生活 上的照顧,讓我可以順利的完成學業,僅以此文獻給我最親愛的家人 及幫助過我的朋友們。 張智棟 僅誌於新竹 2009 年 11 月
目錄 中文摘要 ... i Abstract ... iii 誌謝 ... v 圖目錄 ... x 表目錄 ... xv 第一章 前言... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 2 1.3 研究流程 ... 3 第二章 文獻回顧 ... 5 2.1 既有泥砂濃度觀測方法技術回顧與問題評析 ... 5 2.2 泥砂濃度量測電學方法 ... 28 2.3 TDR含砂濃度量測技術及其發展演繹 ... 35 2.3.1 TDR泥砂濃度量測基本原理 ... 35 2.3.2 TDR泥砂濃度感測器設計回顧 ... 40 2.3.3 走時分析方法 ... 46 2.4 頻率域速度分析法 ... 53 第三章 研究方法 ... 60 3.1 頻率域相位速度分析法之含砂濃度量測與標定 ... 60
3.2 頻率域相位速度分析法量測含砂濃度影響因子探討 ... 61 3.2.1 TDR感測器設計 ... 61 3.2.2 水質鹽度影響試驗 ... 62 3.2.3 纜線電阻影響試驗 ... 62 3.2.4 含砂濃度率定試驗評估 ... 63 第四章 試驗結果與討論 ... 66 4.1 TDR含砂濃度量測效能評估與影響因子探討 ... 66 4.1.1 水質鹽度影響 ... 66 4.1.2 纜線電阻影響 ... 73 4.1.3 含砂濃度試驗結果討論 ... 78 4.2 現場實測結果討論 ... 82 4.2.1 石門大圳測試結果 ... 83 4.2.2 集集攔河堰測試結果 ... 84 4.3 溫度效應之初步探討 ... 87 4.3.1 溫度效應影響來源分析 ... 87 4.3.2 rise time於頻率域相位速度分析法含砂濃度量測之影 響 ... 91 第五章 結論與建議 ... 95 5.1 結論... 95
5.2 建議... 96 參考文獻 ... 97
圖目錄
圖1. 1 研究流程圖 ... 4
圖2.1 各式取樣瓶 ... 7
圖2. 2 幫浦取樣器 ... 8
圖2. 3a) Acoustic backscatter method, b) Range gating method (Wren, et al. 2000) ... 10
圖2. 4 雷射束反射法 (Wren, et al., 2000) ... 11
圖2. 5 雷射繞射法 (Wren, et al., 2000) ... 13
圖 2. 6 Optical Backscatter, OBS (D&A Instrument Company) ... 16 圖2. 7 遙測光譜反射法 (Wren, et al., 2000) ... 18 圖2. 8 光纖透光度法示意圖 (Campbell, et al., 2004) ... 19 圖2. 9 Density meter ... 21 圖2. 10 差壓式密度儀,左右圖分別為現地與實驗室的設計 (Calhoun, 2000) ... 23 圖2. 11(a) 水中設置式 (b) 岸上幫浦循環式 ... 23
圖2. 12 Suspended solid density monitoring (Untrasonic) .. 25
圖2. 13 現地實際洪水事件(Starr, 2005) ... 30
圖2. 14 TDR監測儀器配置(Starr, 2005) ... 30 圖2. 15 (a)大洪水,(b)中洪水,(c)小洪水事件時河床基底濃
度與洪水流量關係 (Starr, 2005) ... 31 圖2. 16 平板式與圓柱型電容 (Li et al., 2005) ... 33 圖 2. 17 泥砂濃度(<70%)與電容輸出關係(a)平板式 (b)圓柱 型 (Li et al., 2005) ... 34 圖2. 18 溫度影響電容輸出之關係 (a)平板式 (b)圓柱型 (Li et al., 2005) ... 34 圖2. 19 水質鹽度影響電容輸出之關係 (a)平板式 (b)圓柱型 (Li et al., 2005) ... 35 圖2.20 TDR量測系統示意圖 ... 39 圖2.21 典型TDR波形及走時與穩態值分析示意圖 ... 40 圖2. 22 TDR 感測器形式 (張育嘉,2006) ... 43 圖2. 23Ansoft HFSS® 電磁場有限元素分析軟體其操作介面 ... 44 圖2. 24 Ansoft HFSS®感測器探頭部分元件組合模型示意 . 44 圖2. 25 30cm兩根探針型式感測器電場分析模擬結果(左)感 測器探頭加上金屬遮罩(右)未加上金屬遮罩(鐘志忠, 2008) ... 45 圖2. 26 30cm三根探針型式感測器電場分析模擬結果(左)感 測器探頭加上金屬遮罩(右)未加上金屬遮罩(鐘志忠, 2008) ... 45 圖2. 27 切線法示意圖(張育嘉,2006) ... 47
圖2. 28 參考線法示意圖(張育嘉,2006) ... 48 圖2.29(a)shorted-uncoating感測器於不同鹽度之原始波形,(b) 波形微分後結果(張育嘉,2006) ... 48 圖 2.30 改良後典型水-泥砂混合物之TDR量測波形(林志平 等,2007) ... 52 圖2.31 TDR走時與含砂濃度體積比SS 定關係(林志平等, 2007) ... 53 率 圖2.32 SASW資料擷取分析示意圖(修改自Foti, 2000) ... 57 圖2.33 TDR單段傳輸模型與對應反射係數 ... 58 圖2.34 利用TDR傳輸模型所得到之相位差結果 ... 58 圖2.35 利用TDR傳輸模型所得到之相位速度結果 ... 59 圖3. 1 土壤種類粒徑分析結果 ... 64 圖4. 1 不同形式感測器 ... 70 圖4.2 25cm同軸感測器照片 ... 70 圖4.3 70 公分感測器在不同鹽度下之相位速度 ... 71 圖4.4 70 公分感測器之鹽度實驗結果 ... 71 圖4.5 25 公分同軸感測器在不同鹽度下之相位速度 ... 72 圖4.6 25 公分同軸感測器之鹽度實驗結果 ... 72 圖4.7 45cm 3-rods不同鹽度之頻率域相位速度結果(纜線為 20m QR320) ... 75
圖4. 圖4. 圖4. 圖4. 圖 4 圖4. 圖4. 8 45cm 3-rods不同鹽度影響結果(纜線為 20m QR320) ... 75 9 45cm 3-rods不同鹽度之頻率域相位速度結果(纜線 為140m QR320) ... 76 10 45cm 3-rods鹽度測試結果(纜線為 140m QR320) ... 76 11 25cm同軸式感測器不同鹽度之頻率域相位速度結 果(纜線為140m QR320) ... 77 . 12 25cm同軸式感測器鹽度測試結果(纜線為 140m QR320) ... 77 13 45cm 3-rods感測器泥砂率定曲線 ... 79 圖4.14 40cm同軸感測器泥砂率定曲線 ... 80 圖4.15 45cm 3-rods感測器泥砂率定曲線誤差分析 ... 80 圖4.16 40cm同軸感測器率定曲線誤差分析 ... 81 圖4.17 25cm同軸感測器泥砂率定曲線 ... 81 圖4.18 25cm同軸感測器率定曲線誤差分析 ... 82 圖4. 19 石門大圳明渠段現場狀況 ... 83 圖4. 20 石門大圳明渠段TDR SSC感測器量測歷時資料 .... 84 圖4. 21 超音波、TDR、比重瓶法泥砂濃度量測方式結果比 較 ... 86 22 TDR SSC與比重瓶法泥砂濃度量測結果差異 ... 86
圖4. 23 幫浦取樣變異性測試結果 ... 87 圖4. 24 溫度影響含砂濃度實驗配置圖 ... 88 圖4. 25 溫度效應對於含砂濃度影響(加熱TDR100 主機) (a) 溫度變化圖(b)含砂濃度變化圖 ... 89 26 溫度效應對含砂濃度影響(加熱多工器)(a)溫度變化 圖4. 圖4. 圖4. 圖(b)含砂濃度變化圖 ... 90 27 TDR主機脈衝方波Rise time 示意圖 ... 92 圖 4. 28 溫度對rise time的影響 (a) TDR主機內部溫度(b)
rise time變化圖 ... 93 29Rise time對於含砂濃度影響數值模擬結果 ... 93
表目錄
表2. 1 各種懸浮質觀測儀器優缺點比較表 ... 26
表2. 2 常見物質介電常數(Curtis and Defandorf, 1929) ... 39
表4. 1 各式感測器受鹽度影響誤差範圍 ... 69
表4. 2 不同長度同軸感測器受鹽度影響誤差範圍 ... 69
第一章 前言
1.1 研究動機
台灣地區受氣候變遷及地質條件影響,大多數河川具有流域小、 坡度陡峻、流量快速反應降雨、洪枯流量懸殊等特徵,在颱風或暴雨 來襲時由於山區源頭處大量沖蝕崩塌,下游易挾帶大量泥砂沖刷造成 路基損毀、房屋倒塌與民眾生命安全受到威脅,若能即時觀測泥沙濃 度,便能事前預防下游可能造成的災害。而水庫也常因為颱風來襲, 泥沙大量帶入庫區造成民生用水短缺,而庫區內泥沙淤積也使水庫壽 命減短,若能利用泥沙濃度觀測資料作為水庫排砂防淤的參考,便能 有效延長水庫壽命,民生用水的問題也可得到解決,因此觀測泥砂濃 度有其必要性。目前含砂濃度雖然可以由人工觀測,但重大暴雨事件 不容易預測,而且颱風或暴雨發生期間要動員人力進行觀測有其困難 性,因此自動化觀測泥砂濃度有其必要性。 現今許多自動化監測方法中,電磁波時域反射法(Time Domain Reflectometry,簡稱 TDR)已被應用於泥砂濃度量測,而隨著 TDR 分 析方法的演繹及感測器型態研發改善,已大幅降低泥砂濃度量測誤差 範圍,並不受水質鹽度及泥砂種類影響。但是由於既有分析方法仍著 重在時間域上的分析,包括儀器誤差或現場雜訊干擾等微小改變可能 造成量測結果的不穩定;現有感測器的外觀也因為在河川中易掛雜物或石頭撞擊等,實務量測上無法避免外物干擾。
TDR 頻率域相位速度分析法(Frequency Domain Phase Velocity Method)是以計算 TDR 反射訊號之頻率相位速度,以求得材料之高頻 介電行為(1MHz~1GHz)。相較於傳統 TDR 時間域分析,TDR 頻率 域相位速度分析法除可提供頻率域資訊外,並可減少時間域之雜訊影 響(鐘志忠,2008)。但此一分析方法目前僅有理論基礎及泥砂濃度 量測數值模擬測試 本研究回顧以上問題,企圖藉由新式分析方法應用及感測器型態 改善,期以提升含砂濃度量測的準確度及穩定性。
1.2 研究目的
本研究企圖嘗試基於 TDR 頻率域相位速度分析法,進一步由實 驗驗證此方法的適用性,並探討此方法用於量測泥砂濃度的影響因 子,配合新式泥砂濃度感測器的研發,進而提升含砂濃度量測的準確 度及穩定性。1.3 研究流程
本研究之流程圖如圖 1. 1,主要是針對頻率域相位速度分析方法 及新式感測器的改良進行室內實驗,探討各影響因子對於此分析方法 的影響程度及感測器的量測效能,其中包含水質鹽度影響實驗、纜線 電阻實驗及泥砂種類率定試驗。最後則是對於頻率域相位速度分析法 的適用性與感測器改良後的量測準確度及穩定性進行現場實測評 估。第二章 文獻回顧
2.1 既有泥砂濃度觀測方法技術回顧與問題評析
傳統泥砂濃度量測技術方法主要可分為直接量測法及間接量測 等兩種方法,而直接取樣包括取樣瓶取樣與幫浦取樣法等兩種,但其 不易自動化、試體樣本易受擾動且耗費人力,無法在颱風或豪雨期間 即時反應現地泥砂之濃度。間接量測方法主要利用光學或音波等物理 性質與濁度之關係推估泥砂濃度,量測容易自動化,但其量測關係常 受泥砂粒徑大小、礦物成分組成等其他因素影響,因此量測時需針對觀測目標特別標定。本節參考Wren et al. (2000) 及 Wren and Kuhnle (2002)所做各種含砂濃度量測的量測技術回顧,與 Campbell et al. (2004)提出利用光纖透光度(Fiber optic In-stream Transmissometer, FIT) 之量測方法,並回顧張育嘉(2006)整理其操作原理與優缺點如下述所 示: 直接量測方法 (1)懸浮質取樣器(bottle sampling) 原理: 懸浮質取樣器為一最簡單之取樣方法,其目的在於希望能在 取樣器周圍混水中,取得較有代表性的樣本,以瞭解垂直或橫斷 面的懸移質濃度。而原理係採用取樣瓶置於水中進行取樣,取樣
器具如圖2.1所示,利用取樣瓶則需注意取樣瓶口之水流速度需 等同現地水中流速,否則其取樣之泥砂將不具現地代表性。為控 制瓶口之水流速度能與外界環境達到平衡狀態,已有許多整合性 之取樣裝置可進行使用。一般取樣瓶之操作準則,乃下降取樣瓶 至取樣深度之下約一倍取樣瓶高度之深度進行取樣,然後取樣順 序則由水底向上分層取樣。而採樣則須取回試驗室進行烘乾法或 秤重法求得泥沙濃度。 優點: 取樣瓶法具採樣之可靠性以及普遍性。累積式(integrated type)之取樣器可進行全深度量測。另外,取樣瓶法可作為所有泥 砂量測方法之標定參考。 限制: 取樣瓶在時域上之解析度差,且無法採用自動化方式,得需 以人工方式量測,時間及人力成本耗費極大,且試體可能因人為 擾動而失去代表性,無法確定量測之準確度。此外,人為取樣無 法連續觀測泥沙含量,不能有效反映大雨洪水、颱風時的現地狀 況。
圖2.1 各式取樣瓶 (2)幫浦取樣(pump sampling) 原理: 幫浦取樣利用真空原理進行取樣,通常幫浦之吸入口需面向 上游。如同取樣瓶法,使用幫浦取樣時,其吸入口之水流速度須 與現地水流速度相同。而取樣後之試體則於試驗室進行泥砂濃度 以及粒徑分佈試驗。 優點: 幫 浦 取 樣 提 供 一 可 靠 之 取 樣 法 , 特 別 是 針 對 小 顆 粒 (< 0.062mm)之泥砂樣本。自動化幫浦取樣法可事先程式化,針對不 同時間與量測高程進行設定,以減少人為操作。一般可自動化商 業性產品可參考圖2. 2 所示。
限制: 與其他量測方法比較,幫浦取樣之時間域解析度較差,主要 由於幫浦取樣之過程耗時所導致。另外,試驗室分析將會增加其 量測費用。而取樣之泥砂顆粒尺寸會因為幫浦之取樣口於水中之 方位而有所變化。不過,目前之研究發現在取樣口之相對流速非 小於80%或非大於200%時,其取樣口方位所造成之泥砂濃度變 化不會超過20%。一般可自動化之取樣器其揚程僅有8 至9m, 得需利用沈水式幫浦以採取更深之泥砂樣本,但沈水式幫浦目前 仍無自動化。 圖2. 2 幫浦取樣器 間接量測方法
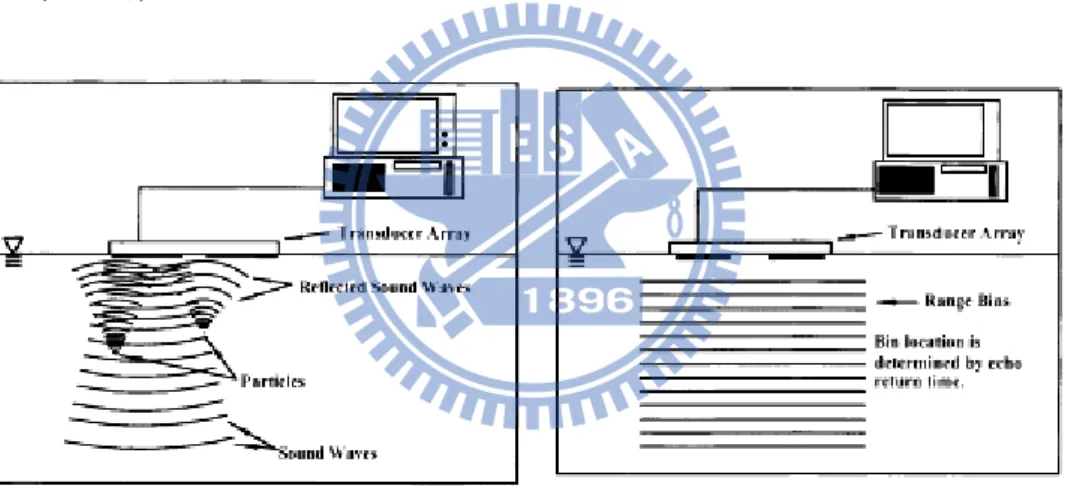
原理: 聲波背散射法由傳感器發射一高頻(1-5 MHz)之聲波,透過聲 波進入水中感測。若水中之懸浮質屬於一均勻尺寸之顆粒材質, 則由反射回傳之聲波訊號(backscattered signal)可計算水中泥砂含 量濃度,量測方法如圖2. 3 所示。此方式所得到訊號之強度取決 於水中泥砂顆粒之大小及濃度;另外,聲納法可選擇不同頻率聲 波 以 探 測 不 同 尺 寸 之 泥 砂 顆 粒 。 但 當 使 用 高 頻 訊 號 時 , backscattered 接收器之量測範圍約1-2 公尺,因此,當量測預定 深度大於2 公尺以上時,則其傳感器得需潛入水下進行探測。聲 波背散射法另有Range Gating 的量測方式,主要透過聲波回響之 反射時間探測不同深度之泥砂濃度,如圖2. 3 所示。 優點: 在所有泥砂濃度量測法中,聲波背散射提供了一非破壞式之 量測方法,並可進行垂直向之量測。而高時間(≒0.1 s)與高空間 (≒1 cm)之解析度,則可觀察擾動泥砂之運動狀況,以提供擾動 泥砂之運動機制之研究資訊。而一般傳統之取樣瓶或是幫浦取 樣,則無法提供即時之訊息。 限制: 建立聲波背散射法所擷取資料與泥砂濃度間之率定關係,是
相當困難且繁瑣,通常由室內標定泥砂濃度與量測訊號強度,以 建立其相對關係,但如何準備可供超音波背散射法標定的試體準 備設備是一件相當困難的工作。而在高泥砂濃度之狀況下,聲波 之衰減量將是一嚴重問題。因此在計算泥砂濃度時,必須考量其 訊號之衰減量,但考慮訊號衰減需要知道泥砂濃度(被量測的未 知數),為克服這項問題,需假設在靠近接收器第一個range bin 內 的現地泥砂濃度,這項假設方法,會使得量測距離之增加而使量 測誤差擴大。
圖2. 3a) Acoustic backscatter method, b) Range gating method (Wren, et al. 2000)
(2)雷射束反射法(focused beam reflectance) 原理:
本方法使用一雷射束投射至水下小型取樣區塊(< 2μm2)並快 速旋轉,爾後水中之泥砂顆粒反射使部分之雷射束,如圖2-4 所 示。而從反射之時間走時,可計算顆粒之弦長(chord length)。此
量測結果通常用於計算水中泥砂之體積含量。 優點: 雷射束反射法不受到泥砂顆粒粒徑之影響。通常雷射訊源可 量測之泥砂顆粒粒徑範圍為1-1000μm,甚至粒徑超過1000μm 大 小之泥砂顆粒也可適用。而其泥砂濃度量測範圍為0.01 g/L 至50 g/L。此儀器重量輕,易於攜帶。且有許多現場量測之文獻報告 可提供參考。 限制: 若水中之泥砂顆粒不具反射效應,如高有機含量的顆粒,則 雷射束反射法之量測效果偏差。而在低泥砂濃度(0.001 g/L)之狀 況,雷射束反射法須較長之擷取時間。由於雷射束反射法中,泥 砂顆粒尺寸取決於顆粒之弦長,因此需事先假設顆粒之幾何形 狀。若泥砂顆粒幾何形狀不一,則會大幅影響其量測值。另外, 雷射束反射法屬於侵入式量測法,且其儀器成本昂貴。
Reflected Laser Beam
Laser Source/
Detector Laser Beam
Sediment Particle
Reflected Laser Beam
Laser Source/
Detector Laser Beam
Sediment Particle
(3)雷射繞射法(Laser Diffraction) 原理: 此方法乃投射雷射束進入水中後,水中之懸浮顆粒將散射、 吸收或反射投射之雷射束,如圖2. 5 所示。而散射後之雷射將由 一多重元素偵像儀(multielement photodetector)所接收,而多重元 素偵像儀主要由環狀偵測器所組合,主要功用為量測雷射之散射 角度。而泥砂顆粒之粒徑則可藉由量測之散射角,透過Fraunhofer 近似公式或Lorenz-Mie 理論解計算得知。透過此方法可不受顆 粒粒徑之影響,然而需事先假設顆粒之密度。 優點: 由於雷射繞射法以量測泥砂顆粒粒徑大小為主,因此雷射繞 射法不受到泥砂顆粒粒徑之影響,也不受到泥砂組成成分之影 響。此方法也應用於量測水泥、巧克力或是微生物中顆粒粒徑大 小。另外,雷射繞射法也不受到泥砂顆粒之折射係數影響。 限制: 如同雷射束反射法,雷射繞射法之儀器成本也相當昂貴;而 其泥砂顆粒尺寸之量測限制約為250 μm,泥砂濃度量測範圍上限 為5 g/L。根據上述限制,若需量測較大尺寸之泥砂顆粒,其需較 長雷射之焦距。另外,由於多重元素偵像儀距需靠近雷射訊源,
故所能量測之空間範圍較小。而雷射繞射法本身屬於一高度技 術,因此需要專業訓練人員負責操作及資料分析。此外,雷射繞 射法之資料經過統計演算後,與泥砂濃度間並非為一對一之關 係,除非現地之泥砂顆粒分佈較為均勻,才可提供較好之量測結 果。 Sediment Partical Laser Source Laser Beam
Concentric Ring Detector Sediment Partical
Laser Source
Laser Beam
Concentric Ring Detector
圖2. 5 雷射繞射法 (Wren, et al., 2000) (4)核能法(Nuclear Measurement) 原理: 核能法主要量測輻射之衰減或反射訊號。量測之儀器分為下 列三種形式:a)量測人為訊源之反射(backscatter)輻射、b)量測人 為訊源之穿透(transmission)輻射,以及 c)量測泥砂顆粒之自然輻 射。其中第一種方式乃採用一人造輻射訊源,將輻射投射至欲量 測試體中,而輻射接收器通常置於與訊源同一平面。而第二種方 法,其輻射接收器通常置於訊源對面,量測因通過濁水後之輻射
衰減量,並比對通過純水後之輻射衰減量。透過上述兩者之比 值,則可計算水中泥砂之含量。上述方法一般利用儀器內部之電 子模組,修正因水質溫度變化及輻射訊源能量衰減之影響。 優點: 此方法因耗能小,適於長時間之觀測。另外,此方法之泥砂 濃度量測範圍為50~12000 ppm,且不受到水的顏色或是水中生物 影響。 限制: 由於人造輻射源會自然衰減,因此需要時常替換輻射源。而 泥砂之化學成分為影響量測讀數之主因。另外,使用核能法之操 作需要具合格執照之專業人員。由於核能法本身之靈敏度限制, 此方法較適用高於1000 ppm之泥砂濃度。另一方面,現地水質本 身之化學成分不一,因此室內標定參數不能適用於現地量測結 果;而核能法因人造輻射源會自然衰減之關係,則需要定期性重 新標定量測儀器,故核能法之現地標定程式較為困難。而核能法 每次量測需費3-5 分鐘,因此核能法無法反應水中泥砂濃度之即 時變化。
(5)光學反射法(Optical Backscatter, OBS) 原理:
OBS 採用紅外線或是可見光直接投射於水中進行量測,而部 分 光 線 會 因 懸 浮 顆 粒 而 反 射 。OBS 透 過 數 組 光 電 二 極 管 (photodiode)量測反射之光線。接收之反射光線能量則用於計算 泥砂含量多寡(如圖2. 6 所示)。OBS需於量測前對於已知濃度之 泥砂進行標定程式。 優點: OBS 量測值與均質之泥砂濃度成一線性關係,且此一關係 可適用超過OBS 所能量測之泥砂濃度範圍極限。OBS 提供一高 時域與空間域之解析度,且OBS 模組已經大量商業化。透過遠 端操控及資料傳輸,OBS 可輸出即時資料以提供相關參考使用。 限制: 光學反射法量測結果受到泥砂顆粒尺寸影響。在相同泥砂濃 度但不同泥砂顆粒尺寸之狀況下,其兩者泥砂濃度量測結果相差 約十倍。而光學反射法於小泥砂顆粒粒徑之量測具有較高之靈敏 度;通常20 μm 至50μm 之泥砂顆粒尺寸變化下,其量測值 (V/(g/L))變化達70%,而200 μm至400 μm 之變化時,其量測值 變化為30%。一般光學反射法適用於均勻之泥砂顆粒粒徑或是其 粒徑維持在200-400 μm 範圍內。
圖 2. 6 Optical Backscatter, OBS (D&A Instrument Company) (6)光學穿透法(Optical Transmission) 原理: 如同OBS 法,光學穿透法也是直接將光源投射至水中進行 量測。而水中之泥砂顆粒將部分吸收或反射其光線。而光線接收 器將置於光源之對面以量測光線之衰減量。透過事先的標定程 式,則可了解量測衰減量於泥砂濃度之關係。 優點: 光學穿透法承繼OBS 之多項優點,尤其是在低濃度之狀 況,光學穿透法提供了比OBS 更為精確之解析度。同樣地,光 學穿透法之儀器也模組已經大量商業化。 限制: 光學穿透法如同OBS 也面臨相同之量測問題,但泥砂顆粒 粒徑之影響較OBS 小,而泥砂顆粒之折射係數亦會影響其量測
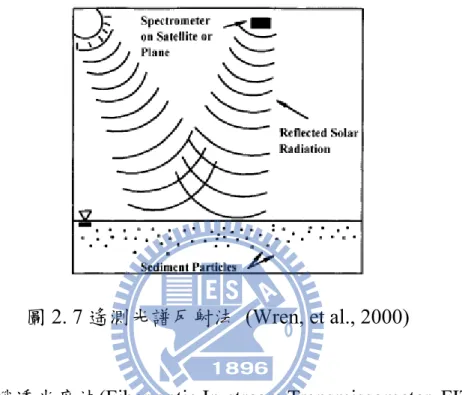
結果。光學穿透法之量測讀數與泥砂濃度間並非成一線性關係, 在濃度量測範圍上限時,很大的泥砂濃度改變僅會造成儀器訊號 輸出很小的改變量,可採用較短之光學傳輸路徑以修正上述之問 題,但水流的干擾較大。若遇到泥砂含量之變化量較大時,需採 用多組光學穿法儀器進行量測。 (7)遙測光譜反射法 原理: 光譜反射法主要量測經由水中泥砂顆粒所反射之紅外線或 是可見光,如圖2. 7 所示。光輻射經由攜帶式、空照式或是衛星 式之光譜儀(spectrometer)量測。而泥砂濃度與反射光輻之關係取 決於泥砂顆粒之光學性質、感測器接收角度、日照最高點角度以 及量測之空間解析度。 優點: 光譜反射法能進行大範圍地域之量測,而且能持續觀察大範 圍地域之變化,特別是高泥砂濃度或侵蝕淘刷等問題之觀察,可 提供需進行沖蝕防制工作的重點區域。 限制: 通常增加0.05 g/L 之泥砂含量,光譜反射法量測之反射量僅 增加約1%,但是感測器因外來光源、水位或是大氣影響之誤差
量則大於1%。而光譜反射法因受到泥砂組成礦物成分之影響甚 大,因此在泥砂組成成分未明狀況下,所量測之泥砂濃度具有相
當大之誤差。另一方面,光譜反射法也受到泥砂顆粒尺寸之影響。
圖2. 7 遙測光譜反射法 (Wren, et al., 2000)
(8)光纖透光度法(Fiber optic In-stream Transmissometer, FIT) Campbell, et al. (2004)提出光纖透光度法,主要利用光纖製 成之感測器,由一端利用LED 輸入強光,再由感測器之另一端 利用影像偵測器(Photodetector)記錄其接收到的光源衰減強度, 如圖2. 8 所示。此方式所得到訊號之強度取決於水中泥砂種類及 顆粒之大小,當泥砂濃度升高或顆粒粒徑越大,將使訊號有明顯 程度衰減。 優點: 光纖透光度法量測範圍約從0~10 g/L,可兼顧低濃度與高濃
度,相較現有光學濁度計量測範圍較大,且若能經由標定之修 正,可量測渾水濃度之顆粒徑大小最大可至710 μm 最小至45 μm,亦可達到即時監測用;且此法可透過調整光學的路徑長 (optical pathlength)或改變光源之強度,便可以較低的儀器成本來 增加其量測效能,。 限制: 此法量測效能僅於室內試驗室測試,尚未應用於現地監測 用;且其量測系統受懸浮粒子粒徑影響大,若使用於現地量測 時,則需加入精密的感測器系統,能即時量測及計算懸浮粒子之 粒徑大小,以作為修正之用。 圖2. 8 光纖透光度法示意圖 (Campbell, et al., 2004)
其他方法:
1.震動式密度儀(Vibrating Tube & Density meter)
本方法將水引至岸邊或水中定點設置固定之Vibrating tube, Vibratingtube 不斷震動並由電子儀器紀錄震動頻率,其使用原理 則靠:(1)泥砂濃度與泥水混合物之單位重,(2)泥水混合物之單 位重與 Vibrating Tube 之震動週期這兩種關係,以決定泥砂濃 度。然而,此方法具有以下幾點誤差來源:不溶解之固體濃度所 造成之平移誤差、水溫、流速及Vibrating Tube 中其他雜質等。 前面三種誤差可透過感測器進行校正,而最後一項則比較難以解 決。
而Density meter (Vibration element technology)方法採用一 Vibrationelement(如圖2. 9 所示),可量測於溶液之自然震動頻 率。當溶液中之泥砂濃度增加或減少時,而使得整體的溶液比重
改變,因此在不同泥砂濃度狀態下之自然共振頻率隨之改變,但
圖2. 9 Density meter
2.差壓式(Differential Pressure)
Lewis與Rasmussen (1996)提出差壓法(differential pressure)量測 方式,其利用兩個壓力計量測出泥水混合物之比重差,進而推算出水 中含砂濃度(如圖2. 10所示),但此方法易受水的溫度、水流擾動、 水流流速以及水中溶解成分等因素影響。 Prof. Rasmussen 研究群經 過 10 年的陸續研究,在Tollner 等(2005)中回顧差壓式量測方法,實 驗室試驗量測精確度可達10 到 1000mg/L,但在現地量測時因水中時 有漂流物體經過感測器,其會造成水流擾動進而導致瞬時水壓分佈不 平均,造成感測器所量測到之壓力與真實值差異頗大大,造成之誤差 可高達65,000mg/L,因此結論指出該方法應不適合in-stream條件下的 量測。
角哲也 (2003)之現地測試較為成功,但須配合水循環系統或浮 台系統製造非in-stream的條件,如圖 2. 11所示。其中浮台系統僅適用 於水體表面之量測,且儀器可能受河流衝擊而損壞;水循環系統利用
抽水幫浦引水至裝置內進行循環式長期監測,然而該裝置在長期監測
圖2. 10 差壓式密度儀,左右圖分別為現地與實驗室的設計(Calhoun, 2000)
3. Impact sampler 此方法之原理基於動量之轉移。泥砂顆粒撞擊頻率透過傳感 器紀錄,而撞擊頻率則取決於重量、速度以及泥砂顆粒撞擊之角 度。 4. Video microscopy 本方法採用一影像攝影機以拍攝現地泥水混合物,影片可用 於勘查泥砂之實況;影片透過電腦自動處理,則可分析泥砂之顆 粒大小、形狀以及數量。此方法影響因素包含光源之種類、攝影 系統之靈敏度以及影像處理方法。然而本方法較不適用於泥砂變 遷之行為。
5.超音波傳輸衰減( Accoustic transmission attenuation)
此方法主要原理採用一對音波探頭,以一探頭發射超音波 (Untrasonic)另一探頭接收其能量的方式進行量測,如圖2. 12 所 示。藉由超音波之衰減量,估計泥水混和物之比重。該量測方法
常用於工業上,在天然河川中之應用需要進一步評估,包括洪水
圖 2. 12 Suspended solid density monitoring (Untrasonic) 依據上述各項量測方法,簡單將各項方法之特徵及優缺點列表於 表 2.1。由表 2.1 得知,大多數的現地監測方法,其量測範圍遠小於 泥砂運移觀測之需求(至少 10 萬ppm)及需多點觀測,且多數之量測 儀器甚為精密貴重,因此,這些電子儀器在洪水期間之使用堪虞。此 外,以水理輸砂的觀點考量,含砂濃度在不同深度與位置之變化也很 重要,而大多量測方法僅能針對單一點量測,礙於成本以及現場安裝 考量,多點量測的效率與經濟性差,無法有效的大範圍量測。
表2.1 各種含砂濃度自動化觀測儀器功能比較表 方法 操作原理 設置成本 操作性 濃度量測範圍 量測準確度 (誤差範圍) 量測誤差來源 耐用性 較 易 取 得 得 商 業 儀 器 Optical (光學式) 利用可見光或 紅外線之穿透 或散射反射進 行含砂濃度量 測 已商業化,單 點儀器成本 約為10-30 萬。 操作簡易、具有 良好時間解析 度,可遠端自動 化量測,屬於入 侵式 取決於散射量測角度 與光源及接受器型 態,亦受粒徑分佈影 響。90 度散射之量測 範圍一般小於5000 ppm,大角度回散射 儀器可達10~20 萬 ppm 在特別率定的情形 下,90 度散射量測 靈敏度高,量測準確 度度約為100 ppm。大角度回散射 儀器量測準確度隨 量測濃度增加而增 加,誤差約在100 ~ 5000 ppm 之間 受顆粒顏色與 粒徑大小影響 大,率定工作困 難 儀器感測 面易受污 染。於洪 水條件下 之耐用性 堪虞 SuperSonic (超音波法) 利用超音波傳 輸能量之衰減 探測含砂濃度 已商業化,單 點儀器成本 約為20 萬。 操作簡易,具有 良好時間解析 度,可自動化量 測,屬於入侵式 取決於感測器尺寸、 頻率及粒徑分佈。在 感測器間距10cm 及 含泥量大於20%狀況 下,量測範圍一般小 於15 萬 ppm 在特別率定的情形 下,量測準確度隨量 測濃度增加而增 加,誤差約在1000 ~ 5000 ppm 之間 受感測器尺 寸、泥砂顆粒大 小、種類影響 大,率定工作困 難 於洪水條 件下之耐 用性堪虞 雷射繞射 (Laser diffraction) 利用雷射之折 射角探測淤砂 顆粒 已商業化,但 儀器成本為 目前所有方 法中最高 操作複雜,需專 業訓練。具有良 好時間解析 度,屬於侵入式 量測法 一般量測範圍小於 5000ppm 量測靈敏度高,量測 準確度度約10 ppm 不受粒徑影 響,但由於探測 空間範圍小,易 受局部性擾動 於洪水條 件下之耐 用性堪虞
其 他 儀 器 核能法 (Nuclear) 利用透射或反 射之gamma 或 X-rays 進行 量測 尚未商業化 操作複雜,需專 業訓練。耗能 小,適於長時間 觀測,屬於入侵 式 一般量測範圍約為 500-12000ppm 取決於核能法本身 之靈敏度限制,此方 法較適用高於 1000ppm 受泥砂化學成 分影響,因人造 輻射源會自然 衰減之關係,需 定期性重新率 定量測儀器 維護性 差,且現 地標定程 式較為困 難 差壓式 (Differential pressure) 利用兩個壓力 計(或差壓計) 由不同高度壓 力差計算出泥 水混合物之比 重,進而推算出 水中含砂濃度 尚未商業化 操作簡單,屬於 非侵入式量測 實驗室試驗量測精確 度可達10 到 1000ppm 受水中漂流物影 響,量測誤差可高達 65,000ppm 易受溫度、水流 擾動、水流流速 以及水中溶解 成分等因素影 響 儀器易受 水流影響 而損壞, 耐用性堪 虞 電容式 (Capacitance) 利用平板或圓 柱型電容感測 器,基於輸出之 電流容量與濃 度成正比關係 之原理 尚未商業化 操作簡單,屬於 非侵入式量測 量測技術具有高濃度 量測的能力,但黏土 和砂的粒徑大小會影 響濃度之輸出結果 泥砂濃度量測在低 濃度量測時,其準確 性不足 受溫度、水質導 電度及泥砂種 類所影響大,前 者可以修正補 償,但後兩者無 法即時量測補 償 耐用性有 待商榷
2.2 泥砂濃度量測電學方法
由前小節所述,於泥砂濃度量測現有技術方法有諸多的限制,無 法實際達到實際量測之需求,例如能兼顧低濃度與高濃度泥砂之量 測,故近年來學者紛紛研究並嘗試以電學方法作為量測,目前主要利 用 電 學 方 法 量 測 可 分 為 電 磁 波 時 域 反 射 法 (Time Domain Reflectometry,簡稱 TDR)及電容量測方法,因此分別於此節敘述此 兩種量測方法之優缺點及量測限制。 近年來由於先進監測技術的發展,因此將電磁波時域反射法用於 大地工程監測技術上,已有多項成果,而Starr (2005)將TDR 監測技 術應用於河床基底泥砂濃度量測上,其量測方法為使用三根長 55cm 不鏽鋼棒與2.5cm 厚之德爾林塑膠(Derlin®)所組成之探頭,並且分別 於流量為5、70 及 130 CMS 三個不同大小之洪水事件(如圖 2. 13 )所 示中,監測河流基底濃度之變化,其研究監測配置如圖2. 14。 實際監測結果如圖2. 15 所示,當感測器未做泥砂種類的標定時,量 測水砂混和物濃度之標準偏差約在 20 g/L 的範圍內,而當感測器完 全埋入河道0~2.5 cm 底泥材質時,量測標準偏差約在 200 g/L 之範 圍內。 除此之外,監測結果顯示在中、大規模洪水事件中,河床基底所 量得之濃度值高達 1500 到 1900 g/L 之間與試驗室率定有一良好相關性,但在小洪水事件中,所量得得濃度值較大洪水事件稍低僅200 到800 g/L。 但若河床基底出現高濃度的現象時,研判可能為河床基底產生超 高濃度流,而這種現像是傳統儀器無法在河床基底可量測到的。由 Starr (2005)研究所提出之電學泥砂濃度量測技術,主要為解決高濃度 量測的技術,研究結果顯示當感測器埋在河床基底約 0~2cm,發現 大、中規模洪水事件,基底濃度從400 升至 1200 g/L 之間,且過流 量尖峰後,穩定在 1500 至 1900 g/L 之間,最後則又回到 400 升至 1200 g/L 間;小洪水歷時之濃度變化則僅約 200 至 800 g/L 之間, 這些結果吻合高濃度泥砂運移與河道侵蝕之關係。而其量測主要限 制,為在低濃度的環境中量測,以河川之泥砂濃度變化範圍考量,量 測誤差還是遠超過能容許的最大範圍;甚且其所研究對象為河床基底 超高濃度(甚至已快接近土壤含水狀態),並不能代表河川或於蓄水設 施中懸浮濃度量測之參考。因此,若為滿足低濃度量測需求,則需再 作進一步研究。
圖2. 13 現地實際洪水事件(Starr, 2005)
圖2. 15 (a)大洪水,(b)中洪水,(c)小洪水事件時河床基底濃度與洪水 流量關係 (Starr, 2005)
而Li et al. (2005)提出以電容方式量測含砂濃度,其方法主要利用 平板及圓柱型電容感測器,如圖2. 16 所示,當泥砂濃度增加時,Li 等 學者基於輸出之電流容量與濃度成正比關係之原理,施作相關影響試 驗來驗證電容感測器的效能。試驗測試所用之土樣分別為兩試驗場址 農田裡之表土與含砂較多之表土,其影響因子探討分為以下五種:(1) 泥砂濃度、(2)溫度影響、(3)水流速度、(4)土壤組構及(5)水質鹽度。 研究結果顯示: (1)當泥砂濃度體積百分比≦70%及其密度在 0~1150 kg/m3 時, 所量得輸出之濃度與電容之關係有一線性良好相關性,如圖 2. 17 所示;當泥砂濃度體積百分比≧70%或其密度為 1150 kg/m3 時,結果將趨於非線性化。 (2)在相同濃度下,量測輸出結果隨著溫度升高而提高,但其線 性度稍差,如圖2. 18 所示。 (3)在水流流速 0~2 m/s 下,感測器量得結果並未受影響。 (4)土壤組構不同對量測結果影響非常小。 (5)水質鹽度會使所量得值升高,如圖 2. 19 所示,但發現當鹽度 濃度在小於0.2 %時,量測誤差約於±0.3 %,但若當鹽度濃度在 大於0.2 %時,則將使量測誤差上升約達到±1.1 %。 綜合上述測試結果,電容式泥砂濃度量測技術具有高濃度量測的
能力,但黏土和砂的粒徑大小會影響濃度之輸出結果及當在高濃度
(大於 70%)時,因沉澱物與水已經很難再流動,將導致無法量測;除 此之外,電容式泥砂濃度量測在低濃度量測時,其準確性不足等,因
此尚需進一步研究。
圖2. 17 泥砂濃度(<70%)與電容輸出關係(a)平板式 (b)圓柱型 (Li et al., 2005)
圖2. 18 溫度影響電容輸出之關係 (a)平板式 (b)圓柱型 (Li et al., 2005)
圖2. 19 水質鹽度影響電容輸出之關係 (a)平板式 (b)圓柱型 (Li et al., 2005)
2.3 TDR 含砂濃度量測技術及其發展演繹
2.3.1 TDR 泥砂濃度量測基本原理
時域反射儀(Time Domain Reflectometry)是以電磁波為基礎之探 測技術,基本原理與雷達相同,但屬於一維的電磁波波傳問題。圖
2.20 為 DR量測系統之示意圖,主要由階躍脈衝電壓產生器(step generator)、訊號取樣器(sampler) 與示波器 ( oscilloscope)組成,傳輸
系統包括同軸纜線(coaxial cable)與感測器(measurement waveguide)。 感測器為同軸纜線之延伸,同時作為訊號傳輸與感測元件。TDR 量 測主要由階躍脈衝電壓產生器發射一電磁脈衝進入同軸電纜及感測 器,並由示波器記錄感測器內阻抗(impedance)不連續所造成之反射, 而感測器之設計主要將監測之環境變化轉換為感測器之傳輸阻抗變 化,如此便可藉由反射訊號得知環境變化參數。 電磁波於傳輸線內(包括同軸電纜與感測導波器)傳遞行為之主要 控制參數為傳遞常數(propagation constant) 及特徵阻抗(characteristic impedance)。傳遞常數控制波之傳遞速度與衰減,受到傳輸線內介質 之電學性質所影響;特徵阻抗是由傳輸線導體之斷面幾何與傳輸線內 介質所決定,控制波傳之反射訊號率大小。 典型的TDR訊號如圖 2.21所示。圖中TR為感測器感受外界物質改 變之走時V∞為感測器之末端穩態值,由走時於末端穩態值之反射 訊號可決定感應導波器內介質的電學性質,包括介電度(dielectric permittivity)與導電度(electrical conductivity)。介電度控制電磁波之傳 遞速度,相反地,可由量測電磁波速度計算介電度。Topp (1980)等學 者定義視介電常數(apparent dielectric constant, εa)可由反射訊號之來
回走時(TR)及感測器長度(L)以下式決定: 2 2 ⎟⎠ ⎞ ⎜ ⎝ ⎛ = L cTR a ε (2-1)
其中,C 為光速,TR為走時,L 為感測器長度。
導電度σ則是由末端穩態值V∞求得(Lin, et al., 2007a),而研究發 現水土混合物之導電度隨泥砂濃度增加而增加,因此利用此一正相關 係藉由導電度求得泥砂濃度有其可能性,但林志平等(2006)發現除了 泥砂種類之外,導電度與泥砂濃度的關係也受到泥砂種類與溶解鹽度 之影響,然而現地監測技術尚無法於現場分離水相導電度σw 的影 響,因此 TDR 導電度利用於泥砂濃度量測上有其困難性。由於導電 度法受到泥砂種類與水體導電度影響甚大,因此希望能由較不受土壤 種類影響的介電度法求得含砂濃度。 因組成土壤組構之各種物質之介電常數(Dielectric constant)會隨 著其本身特性而各有不同,常見組成物質之介電常數如表2. 1 所示。 而泥砂濃度量測之原理主要基於水與土壤顆粒之介電度的差異性,水 的介電度為80,土壤顆粒之介電度為 3~5,水土混合物之整體介電度 則受到水與土的體積含量比例所控制。因此水土混合物之視介電常數 隨泥砂濃度之增加而減少,視介電常數與泥砂濃度之關係可以介電性 質之組構率為基礎進行標定。電磁波於感測器內之來回走時與介電性 質有一定的關係,故於實務上可以視介電常數來決定泥砂濃度。而水 土混合物的整體介電度受水與土的體積含量比例所控制(Dobson et al., 1985; Sihvola, 1999)因此渾水的介電度可由下式描述之
ss w a SS ε SS ε ε =(1− ) + (2-2) 其中εa 為渾水的視介電常數,SS 為泥砂濃度體積比,範圍從 0~1 之 間,εw 為水的視介電常數(約為 80),εss 為砂土顆粒的視介電常數(約 在3~10 之間)。若已知感測器長度 L,根據視介電常數 εa 的定義(2-1) 即可得知TDR 含砂濃度量測走時與泥砂濃度的關係式如下: ) )( ( ) )( 1 ( SS t SS t t = − Δ w + Δ ss Δ (2-3) 其中Δt為感測器於渾水中的走時,Δtw與Δtss為感測器於水中及土中之 走時。感測器在水中及土中的走時可由標定得知,而根據 (2-2)及 (2-3)式中泥砂濃-度體積比可由下式表示之: s w w ss w a w t t t t SS Δ − Δ Δ − Δ = − − = ε ε ε ε (2-4) 得知泥砂濃度體積比 SS 後便可轉換成含砂濃度 ppm (milligram per liter, or mg/l) 如下式: 6 1 10 1 ) ( SS G SS mgl ppm s − ⋅ = − (2- 5)
表2. 1 常見物質介電常數(Curtis and Defandorf, 1929)
Material Dielectric constant Air 1 Water 80 at 20°C Ice 3 at -5°C Basalt 12 Granite 7-9 Sandstone 9-11 Dry loam 3.5 Dry sand 2.5 圖 2.20 TDR 量測系統示意圖
圖 2.21 典型 TDR 波形及走時與穩態值分析示意圖 2.3.2 TDR 泥砂濃度感測器設計回顧 張育嘉(2006) 為提昇介電度量測精度,藉由系統參數與介電度 理論量測靈敏度之關係來區分影響因素,系統參數包括感測器幾何參 數及傳輸延長線之電阻,感測器幾何參數包括感測器長度(L)及幾何 阻抗(Zp),而量測靈敏度則是單位元物理變化量所造成之量測量變 化,亦即量測量對於物理量的偏微分。由於視介電常數(εa)之計算來 自於電磁波於感測器內走時分析而得,因此將視介電常數之量測靈敏 度 Ska 定 義 為 電 磁 波 走 時 對 其 視 介 電 常 數 之 微 分 , 由 於 走 時 c L TR =2 εa / ,將此結果帶入上述視介電常數靈敏度參數中可得下列
式子 a a ka c L d dT S ε ε = = (2-6)可知,理論上視介電常數之量測只受感測器長度 L 影響,幾何 阻抗並不會影響量測靈敏度。 透過上述理論,張育嘉(2006)將影響因子區分為以下三類,並分 別說明設計概念,感測器設計示意圖如圖2. 22所示: (1) 感測器長度(Probe length, L): 由系統參數對介電度量測靈敏度可得知,隨感測器長度增長時, 對εa量測靈敏度將逐漸提昇。 (2) 絕緣或未絕緣(coating or uncoating): 導電度與介電度分別控制反射訊號之衰減與走時,當介電度維持 不變但導電度改變時,波形受到導電度的影響使得走時分析亦會受到 影響,另外,但欲以較長的感測器增加介電度量測靈敏度時,水中的 導電度將使得訊號衰減而無法辨識長感測器末端之反射訊號。因此本 研究將嘗試感測器導體絕緣,以瞭解是否能於高導電狀態下,將導電 度影響分離,並避免長感測器無法分辨末端反射訊號之問題。 (3) 短路處理或開放式(short or open): 由量測原理得知,導電度控制電磁波之衰減,而一般傳統開放式 (2- 6) 由
感測器受量測物體導電度影響程度顯著。Cereti et al.(2003)曾嘗試以 TDR 短路方式提昇介電度量測之準確性,另外 Lin and Tang (2005) 也 利用短路方式進行TDR 伸張計感測器研發。 張育嘉(2006)利用此感測器配合參考線分析方法進行含砂濃度室 內實驗,量測到的最大誤差為14825 ppm,其分析方法將於下小節詳 述之。 由於感測器量測準確度與感測器型式與探針有關,鐘志忠(2008) 針對感測器外部型式與探針部分進行數值模擬及討論,所使用軟體為 Ansoft HFSS® 電磁場有限元素分析軟體,以有限元素數值模擬方 式,藉以分析不同探針形式之感測器其 3D電磁場分佈情形。Ansoft HFSS® 電磁場有限元素分析軟體其操作介面如同圖2. 23所示,藉由 元件構成方式,可針對研究需求進行感測器模型建置。圖 2. 24則為 感測器探頭部分元件組合模型示意,藉由模型建立與邊界設定,便可 進行3D電磁場模擬動作。圖 2. 25以及圖2. 26分別為兩根探針形式以 及三根探針形式感測器,模擬於探頭部分進入水中之電磁場能量分佈 結果。圖 2. 25右方模擬感測器探頭部分若無金屬外罩,由於兩根探 針形式為非對稱結構,則會因邊緣效應造成電磁場外洩,反之加上金 屬外罩,則可隔絕洩漏電磁場(圖 2. 25左) ;三根探針形式屬於對稱 結構,探頭部分電磁場外洩效應較低(圖 2. 26左),但加上金屬外罩效
果較佳(圖 2. 26右)。於探針形式比較方面,雖然兩根探針形式雖然量 測範圍較廣,但三根探針形式之電磁場量測分佈集中於探針部分,可
降低天線效應所產生之干擾,提高走時量測之穩定性。透過感測器長
度補償,增加量測範圍,以及泥砂濃度環境較於土壤含水量量測環境
均勻,三根探針形式加金屬遮罩可能提供一較好的泥砂感測器參考。
Open-uncoating Short-uncoating Open-coating Short-coating
L
Open-uncoating Short-uncoating Open-coating Short-coating
L
圖2. 22 TDR 感測器形式 (張育嘉,2006)
圖2. 23Ansoft HFSS® 電磁場有限元素分析軟體其操作介面
圖 2. 25 30cm 兩根探針型式感測器電場分析模擬結果(左)感測器探頭 加上金屬遮罩(右)未加上金屬遮罩(鐘志忠,2008)
圖 2. 26 30cm 三根探針型式感測器電場分析模擬結果(左)感測器探頭 加上金屬遮罩(右)未加上金屬遮罩(鐘志忠,2008)
2.3.3 走時分析方法
切線及參考線走時分析法
根據TDR泥砂濃度量測原理得知可利用介電常數求得泥砂濃 度,因此可利用電磁波於感測器來回走時,以瞭解泥沙濃度變化。張
育嘉(2006)所提出之走時分析方法可分為切線法(tangent line method) 與參考線法(reference line method,Lin and Tang,2005)兩種,如圖 2. 27 與圖 2. 28所示。切線法主要是計算由TDR感測器波形之起始點至末 端反射之走時,而末端反射點通常較難決定,故利用感測器末端訊號
反射特性,以切線方式求得其末端反射點,作為計算電磁波於感測器
走時之依據。而參考線法主要是由Lin and Tang(2005)在研發TDR伸張 計時首次提出,利用前期研發之新式走時分析方法配合末端短路處理 之感測器,原理主要採用感測器末端訊號反射處,選擇固定之反射係 數與波形之交點作為走時分析之起始與終點。 張育嘉(2006)實驗結果指出,在使用short-uncoating感測器下,兩 種不同分析方法所得的結果顯示切線法最大誤差範圍約在 30000 ppm,而參考線法最大誤差範圍為 10000 ppm,顯示參考線法較適合 用於分析TDR波形走時,但由於參考線法中參考線的選擇易受到感測 器形式、纜線電阻及環境溫度影響,需事先透過標定以決定參考線位 置。張育嘉(2006)後續研究發現末端短路處理之感測器,其量測不同
水質鹽度波形交會位置約為感測器區段TDR波形之反曲點。圖 2.29(a) 為不同鹽度於0、80000 以及 150000 ppm濃度之TDR波形,經過微分 處理後,圖 2.29(b)發現波形轉折點,也就是斜率最大點不受導電度 影響。透過實驗驗證後,張育嘉(2006)將shorted-uncoating感測器實驗 以轉折點法重新分析,其泥砂濃度量測最大誤差約為10000 ppm,量 測精度約等同於參考線法,但克服了參考線選擇的缺點。不過此方法 在低濃度下準確度仍較差。 圖2. 27 切線法示意圖(張育嘉,2006)
R efl ec tio n C oe ffi ci en t, ρ 0 500 1000 1500 2000 -0.8 -0.2 0.4
No. of Data P oints
R efl ec tio n C oe ffi ci en t, ρ S hort-uncoating 100(μS /cm)+80000ppm 300(μS /cm)+80000ppm 500(μS /cm)+80000ppm R efl ec tio n C oe ffi ci en t, ρ 0 500 1000 1500 2000 -0.8 -0.2 0.4
No. of Data P oints
R efl ec tio n C oe ffi ci en t, ρ S hort-uncoating 100(μS /cm)+80000ppm 300(μS /cm)+80000ppm 500(μS /cm)+80000ppm 圖 2. 28 參考線法示意圖(張育嘉,2006) 1200 1300 1400 1500 1600 1700 1800 -5 -4 -3 -2 -1 0 x 10-3
No. of data point
ρ S hort-uncoating σw = 100 μS /cm σw = 200 μS /cm σw = 300 μS /cm 0ppm 80000ppm 150000ppm 500 1000 1500 2000 -0.8 -0.6 -0.4 -0.2 0 0.2
No. of data point
ρ S hort-uncoating σw = 100 μS /cm σw = 200 μS /cm σw = 300 μS /cm a b 圖2.29(a)shorted-uncoating 感測器於不同鹽度之原始波形,(b)波形微 分後結果(張育嘉,2006)
Cross-correlation走時分析法 林志平等(2007)根據轉折點法,並配合泥砂量測理論推導,提出 一新式改良分析法。圖 2.30為改良分析方法中典型水-泥砂混合物之 TDR量測波形,其中T1 反射訊號之特徵點,主要透過纜線或探測器 標示走時起點,可去除因現場纜線受到溫度變化或是儀器本身所造成 之訊號走時偏移,以提升量測準確度。T2 為感測器末端反射訊號微 分後之極值。將T2-T1 定義為走時Δτ,而電磁波於導波器中實際的來 回走時為Δt,Δt與Δτ之差異為t0,因此走時Δτ可寫為: c 2L t0 0 t a t
ε
τ
= +Δ = + Δ (2-7) 其中εa為待測體之介電度。 而此分析方法的標定方式採用空氣與水做為標定物,水與空氣的 TDR 走時(Δτair與Δτw)可表示為 ) ( c 2L t c 2L t 0 0 ⎪ ⎩ ⎪ ⎨ ⎧ + = Δ + = Δ T w w air a ε τ ε τ (2-8) 其中εair為空氣介電度(=1),εw(T)為水之介電度,為溫度 T 之函數, 如以下(Peping, et al., 1995)(
)
(
)
(
)
(
3 5 2 8 3)
25 10 8 . 2 25 10 19 . 1 25 10 58 . 4 1 54 . 78 ) ( = ⋅ − ⋅ − − + ⋅ − − − ⋅ − − C T C T C T C T w o o o o ε (2- 9) 藉由此一公式,可以修正溫度造成之水介電度差異。由2-7 式,便可 利用空氣與水之量測結果,以標定系統參數L 及 t0。 基於上述的 TDR 系統參數標定過程,則在不同之溫度下量測渾 水走時結果可改寫為:( )(
)
( )
[
T SS SS]
c L t w ss T ε ε τ ⎟ − + ⎠ ⎞ ⎜ ⎝ ⎛ + = Δ 0 2 1 (2- 10) ΔτT為 TDR 於混水中之走時,SS 為懸浮質濃度。準備幾個不同已知 濃度的懸浮液,並量測其 TDR 走時ΔτT及溫度T,即可以最小平方差 法標定泥砂介電度εss。. 若得到上述之系統參數以及泥砂之介電度 εss 參數,則基於 2-10 式,量測一未知泥砂濃度渾水走時以及其溫度T,則可透過以下式子 求得渾水中泥砂濃度SSestimated:(
)
( )
( )
(
T)
c L T c L t SS w ss w T estimated ε ε ε τ − − − Δ = 2 2 0 (2- 11) 上述過程由此新式走時分析方法之基礎理論,但實際應用時,由 於TDR反射波形易受到雜訊干擾,微分後T1 與T2 極值不易取得穩定結果,因此T1 與T2 位置的決定方式是利用交互相關(Cross-correlation) 函數。交互相關函數為一訊號處理分析方法,主要是比較兩相似的訊 號波形,以瞭解兩波形間的相關程度。林志平等(2007)提出之新式分 析方法,事先先取一筆波形當參考值,而後量測的結果皆與此參考值 做交互相關函數比較,便可知每次量測結果與參考值的相關程度,進 而求得實際T1 與T2 之位置。 新式走時分析方法的優點在於走時起始點由人工給定,較不易受 到 現 場 溫 度 或 儀 器 誤 差 影 響 , 且 配 合 溫 度 補 償 以 及 交 互 相 關 (Cross-correlation)函數分析,其泥沙濃度量測精度可達 1500 ppm,且 大幅減少本身水質鹽度影響。而在不同土壤粒徑影響測試方面,實驗 土壤分別為石門水庫沈澱池之細料粉土、集集攔河堰上游泥砂、及矽 砂土,實驗結果如圖2.31,結果顯示當土壤種類不同時,石門與集集 的率定結果幾乎重疊,表示Cross-Correlation走時方法並不受泥砂種 類影響。不同礦物成分的介電度對於率定關係略有影響,但其率定結 果相差約在15%以內,遠小於現有量測儀器,且礦物成分較能事先率 定,使影響降至最低。
-0.02 0 0.02 0.04 0.06 50 50.2 50.4 50.6 50.8 51 51.2 51.4 51.6 51.8 52 S S Δτ, n s S hihmen clay S ilica silt Theoretical 0 0.005 0.01 0.015 0.02 51.4 51.6 51.8 C hiC hi Theoretical S hihmen S ilica ChiChi silt Kss=6.92 Silica siltK ss= 3.61 Shihmen clay Kss= 7.53 -0.02 0 0.02 0.04 0.06 50 50.2 50.4 50.6 50.8 51 51.2 51.4 51.6 51.8 52 S S Δτ, n s S hihmen clay S ilica silt Theoretical 0 0.005 0.01 0.015 0.02 51.4 51.6 51.8 C hiC hi Theoretical S hihmen S ilica ChiChi silt Kss=6.92 0 0.005 0.01 0.015 0.02 51.4 51.6 51.8 C hiC hi Theoretical S hihmen S ilica 0 0.005 0.01 0.015 0.02 51.4 51.6 51.8 C hiC hi Theoretical S hihmen S ilica ChiChi silt Kss=6.92 Silica siltK ss= 3.61 Shihmen clay Kss= 7.53 Silica silt Kss= 3.61 Shihmen clay Kss= 7.53 圖 2.31 TDR 走時與含砂濃度體積比 SS 率定關係(林志平等,2007)
2.4 頻率域速度分析法
上述的走時分析方法不論是切線法、參考線法或 cross-correlation 走時分析法皆是以走時分析以得到混水的介電度,但時間域的資料分 析,可能受到外在雜訊或是系統穩定性影響,使得量測資料穩定性不 佳。鐘志忠(2008)發展出一種在頻率域決定介電度的分析方法,概念 是採用類似表面波譜法(Spectral Analysis of Surface Wave,SASW) 的相位角速度分析(Phase velocity analysis),將反射訊號進行富立葉 轉換(Fourier transform)並分析前後反射訊號之相位角差,由相位角差可決定量測材料高頻率範圍之電磁波速度或介電度。頻率域的分析
有助於避免雜訊的干擾,且不需要在纜線上製造時間起點的裝置,避
免該裝置受損而影響走時分析結果。
表面波譜法SASW為表面震波之頻散曲線(波速與頻率或波長的 關係)量測法 (Nazarian and Stokoe, 1984),主要由表面波之頻散特性 反求其地層剪力波速剖面,試驗方法如圖 2.32所示。其原理為擷取兩 受波器之收錄震波資料,分別進行富立葉轉換後,分析兩個收錄訊號 間各頻率之相位差(Δφ = φ2-φ1),可求得各頻率之有效相位速度 l Vph( ) φ(ω) ω ω Δ = (2-12) 其中 ω 為角頻率,l 為兩個接收器的空間分佈距離。 藉由上述的基本原理,鍾志忠(2008)將 SASW 分析概念引用至 TDR 波形分析,企圖利用局部時間域的波形資料(只需涵蓋感測器 前後的第一次反射資料)及訊號頻譜分析,不必透過複雜的 TDR 傳 輸線與全波形波傳模擬理論,以求解高頻率域的波速資料。 假設TDR以一延長線連接一長度L的感測器,如圖 2.33所示。前 端延長線之特徵阻抗Zc1為 50Ω,感測段之幾何特徵阻抗(當介質為 真空的特徵阻抗)為Zp2,感測段介質在各頻率的介電度εr*以下式描 述:
) ( ) ( 2 ) ( ) ( ) ( ' 0 '' ' * f j f f f j f f r r r rii r πε ε ε σ ε ε ε ⎟⎟= − ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = (2-13) 其中 為介電度實部, 為介電度虛部,σ為材料導電度,f 為頻率, 為真空時介電常數,則感測段的特徵阻抗Zc2 = Zp2/ ' r ε '' r ε 0 ε * r ε 。而感測段 的傳輸函數H 可寫成(Feng et al. 1999) ) exp( ) , (f x x j x H = −
α
+β
(2-14a) ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = 1 ' 1 2 ' 2 2 ε ε ε π α ii c f (2-14b) ⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = 1 ' 1 2 ' 2 2 ε ε ε π β ii c f (2-14c) 其中x 為傳輸距離,波傳之相位速度取決於傳輸函數之虛部,可表示 為 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = = 1 ' 1 2 ' 2 2 ε ε ε β π ii ph c f V (2-15) 由公式(2-12)及(2-15)式可得到電磁波在感測器內來回傳輸的理論相 位角差(l=2L),以 ΔψTheoretical表示,即為 H(f,2L)的相位角。基於傳輸線的波傳理論(Ramo et al., 1994),第一個接收的反射訊號經入射 波之正規化後以反射係數ρ1表示,等於 1 2 1 2 1 c c c c
Z
Z
Z
Z
+
−
=
ρ
(2-16) 第二次接收的反射訊號經入射波之正規化後以反射係數以 ρ2 表示, 等於 ρ2 =(1+ρ1)⋅H(2L)⋅(1−ρ1) (2-17) 藉由SASW 分析概念,可藉由量測此兩個反射訊號 ρ1與ρ2的相位角 差Δψ =ψρ2 -ψρ1,推估電磁波在感測器內來回傳輸的相位角差,進 而利用(2-12)式決定各頻率域的波速資料。由 Δψ =ψρ2 -ψρ1所得到 之相位角差除了電磁波來回傳輸所造成的相位角差,另包含感測器頭 尾兩個介面所造成的反射與折射相位角。 為探討Δψ =ψρ2 -ψρ1 是否能準確估計理論相位角差,假設以不 同導電度的水作為介質,圖 2.34為兩個反射訊號的相位角差Δψ與理 論相位角差ΔψTheoretical,可明顯發現Δψ在低於 1GHz頻率下就與理論 值相異(既使導電度為 0,仍然與理論值差異甚大),除了介面反射與 折射的干擾,主要原因在於ψρ1 在反射過後其相位角為一反相狀態 (一般而言Zc2小於Zc1,因此ρ1為負反射)。因此若將ψρ1減π,相當於將時域波形資料的第一反射訊號乘上-1 反轉,則修正過後的相位角 差Δψ+ π (以Δψm表示)在導電度為 0 時與ΔψTheoretical便無差異,但當 導電度不為 0 時,反射與折射所造成的相位角干擾不為π,在低頻將 影響理論相位角差的估計,但在高頻時,因相位角較大,因此該微小 之干擾影響不大,由分析結果顯示並可準確估計至 100MHz (隨導 電度而異)。圖 2.34對應的相位速度Vph如圖2.35所示,由此圖可驗證 以兩反射訊號量測相位角差所得到之相位速度,可視為一量測高頻相 位速度依據,高頻之相位速度不受導電度的影響,也正是含砂濃度量 測所需要之頻率範圍。 Source Signal analyzer Receiver 1 Receiver 2 L time Receiver 1 Receiver 2 圖2.32 SASW 資料擷取分析示意圖(修改自 Foti, 2000)
water
Z
c1= 50
∗=
2ε
2 CZ
Z
pL
ρ
1ρ
2 圖 2.33 TDR 單段傳輸模型與對應反射係數 104 105 106 107 108 109 1010 10-3 10-2 10-1 100 101 102 103 Freq., Hz U nw rap p has eΔφ
TheoreticalΔφ
m σ= 0 μs/cmΔφ
σ= 100 μs/cm σ= 400 μs/cm 圖2.34 利用 TDR 傳輸模型所得到之相位差結果107 108 109 3 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8x 10 7 Freq., Hz V ph , m /s