建築風環境定向地表風速計與煙流可
視化風向量測研究
內 政 部 建 築 研 究 所 自 行 研 究 報 告
中華民國 107 年 12 月
建築風環境定向地表風速計與煙流可
視化風向量測研究
內 政 部 建 築 研 究 所 自 行 研 究 報 告
中華民國 107 年 12 月
研 究 人 員 : 李鎮宏 研究員兼主任
研 究 期 程
:
中華民國 107 年 2 月至 107 年 12 月
Architecture and Building Research Institute,
Ministry of the Interior
Final Report
Development of Directional Irwin Probe
and Smoke Visualization to Measure the
Pedestrian Level Wind Environment
By
Lee, Zhen-Hung
目 次
表次
………Ⅲ圖次
………Ⅴ摘要
………Ⅶ第一章 緒論
………1 第一節 研究緣起………1 第二節 文獻回顧………2 第三節 研究目的與方法………11第二章 定向歐文探針研發
………13 第一節 量測與分析方法………13 第二節 DIRP 風速校正………16 第三節 前期研究成果………17第三章 實驗規劃與量測分析
………21 第一節 風洞實驗設備………22 第二節 實驗規劃………27 第三節 Cobra 與 DIRP 風速風向量測………29 第四節 煙流顯象………43第四章 結論與建議
………45 第一節 結論………45 第二節 建議………45附錄一 低煙霧冰水機操作程序
………47附錄二 電子式壓力掃描器 PSI 操作流程
………53附錄三 三維動態式皮托管量測操作流程
………63附錄四 期中審查意見答復表
………69附錄五 期末審查意見答復表
………71參考書目
………73表次
表 3-1 風速比對(CASE1) 30 表 3-2 風向比對(CASE1) 30 表 3-3 DIRP 靜風壓係數風向率定結果(CASE1) 31 表 3-4 點 1 風速比對(CASE2) 36 表 3-5 點 2 風速比對(CASE2) 36 表 3-6 點 3 風速比對(CASE2) 36 表 3-7 點 4 風速比對(CASE2) 37 表 3-8 各點平均風向比對(CASE2) 37 表 3-9 DIRP 靜風壓係數風向率定結果(CASE2) 38 表 3-10 風向比對(CASE 3) 41 表 3-11 DIRP 靜風壓係數風向率定結果(CASE3) 42圖次
圖 1-1 流體解析系統與 VR 可視系 3 圖 1-2 棉纖可視化示意圖 4 圖 1-3 細砂可視化示意圖 4 圖 1-4 雷射都普勒速度儀 5 圖 1-5 煙霧可視化(下沉氣流) 6 圖 1-6 煙流可視化系統 7 圖 1-7Hot wire 與校正系統 8 圖 1-8 地表風速計剖面圖 8 圖 1-9 使用動態皮托管校驗地表風速計 8 圖 1-10 地表風速計校正回歸線 8 圖 1-11 眼鏡蛇探頭 9 圖 1-12 眼鏡蛇探頭與移動機構配置 9 圖 2-1 IRP 幾何尺寸 15圖 2-2 Directional Irwin Sensor 15
圖 2-3 兩不同方向角下平均壓差比(中心管與表面管) 15 圖 2-4 熱線式風速計與地表風速計校正 16 圖 2-5 地表風速計校正回歸線 17 圖 3-1 實驗矩形柱體配置 21 圖 3-2 風洞本體側視圖 22 圖 3-3 Cobra 外觀 23 圖 3-4 壓力掃描主機 23 圖 3-5 乙太介面電源供應器 24 圖 3-6 壓力掃描器 25
圖 3-7 外接氣體 25 圖 3-8 Antari 低煙霧冰水機 26 圖 3-9 紅外線熱顯像儀 26 圖 3-10 實驗規劃(ㄧ)角隅強風 27 圖 3-11 實驗規劃(二)尾流效應 28 圖 3-12 實驗規劃(三)遮蔽效應 28 圖 3-13 DIRP(4 孔)設計圖 29 圖 3-14 DIRP(4 孔)樣本 29 圖 3-15 應用 Cobra 風向量測結果(CASE 1) 31 圖 3-16 應用 DIRP 風向量測結果(CASE 1) 31 圖 3-17 風向量測比對結果(CASE 1) 33 圖 3-18 CASE1 試驗配置圖 34 圖 3-19 應用 Cobra 風向量測結果(CASE 2) 37 圖 3-20 應用 DIRP 風向量測結果(CASE 2) 38 圖 3-21 各點位風向量測比對結果-第 1 次試驗(CASE 2) 39 圖 3-22 各點位風向量測比對結果-第 2 次試驗(CASE 2) 39 圖 3-23 各點位風向量測比對結果-第 3 次試驗(CASE 2) 40 圖 3-24 CASE2 試驗配置圖 40 圖 3-25 均風向量測比對結果(CASE 3) 42
圖 3-26 應用 Cobra 與 DIRP 風向量測結果(CASE 3) 43
圖 3-28 CASE1 可視化結果 44
圖 3-29 CASE2 可視化結果 44
摘要
關鍵字:定向歐文探針、流場可視化、風向率定 一、研究緣起 國內新建案或都更案在特定高度與容積以上須進行環境風場 風洞試驗,目前該類試驗時係應用Irwin於1981年所發展出來的無 方向性探針,來量測行人高度上之水平方向風速,惟該探針無法 判別風場流向,導致於建築結構設計階段無法確切針對常態擾人 風場予以阻隔或弱化。本案擬進行改良式具方向性判定之歐文探 針研究,希望研發出同時可測得定量(風速)與定向(風向)之定向式 歐文探針( Directional Irwin Probe, DIRP),導入行人風場風洞試 驗,以更能了解區域風場特性,有助於建築物設計(座向、出入口) 或防風結構設施的配置等。前期研究(106年)經一系列不同風速及 低紊流實驗下發現,所開發之定向式歐文探針(DIRP)除能具備一 般歐文探針可量測地表風速之性能外,本案新增之4個表面管可同 時量測靜風壓係數,並作為主要來流風向的判定依據。以4孔DIRP 量測與分析率定結果顯示,當實驗風速5m/s低紊流強度下,實驗 來流風向與本文所提風向量測率定結果間之最大誤差為150,隨風 速加快至7m/s時,其最大誤差降低至70,顯示實驗風速越高,風向 量測誤差越小,所提風向量測與率定技術可作為主要來流風向的 判定方法。 二、研究方法及過程 行人風場是由許多不同因素交互影響而成的複雜流體運動,影 響參數包括風速、風向、建築物外觀與周遭建物等,由於風場特性種類繁多包含迎風面渦旋、建物尾流、穿堂風、角隅強風、遮 蔽效應、金字塔效應、縮流效應及渠化效應等。本研究中共先行 規劃 3 種不同之建築物周邊氣流特性來進行風向實驗,並分別以 4 孔 DIRP 進行風向率定及紅外線熱顯像拍攝煙流體運行軌跡加以 進行初步比對。由於 DIRP 研究尚處於開發測試階段,為能先準確 掌握其風速量測與風向率定等之精確度,採用均勻流方式進行。 (1) 角隅強風 當氣流由建築物的兩旁經過時,氣流會有加速的現象,並在角 隅產生渦流分離,導致建物角隅處有較強風速。 (2) 尾流效應 當風遇到建築物時,會在建築物的背風面形成一個紊流尾流負 壓區,其特性會受到建物外形、風向及周遭建物影響。 (3) 遮蔽效應 近似高度與規模的建築群比鄰而立時,對於迎面而來的氣流會 產生遮蔽效應。 三、重要發現 (一) 結合低溫煙霧與紅外線熱顯像裝置可將主要來流風向加以 可視化,經採用均勻流方式進行 3 種不同簡易建築配置之煙 流可視化與 4 孔 DIRP 風向量測比對,所呈現之趨勢相符, 可作為風向定性的方法之一。 (二) 從目前試驗資料來看,當紊流強度達 8.3%以上時,即使 DIRP 測得之風速低於 3 m/s,其率定風向結果與應用 Cobra 所測 得之風向差異仍在±150 ,因此採誤差±150 為風向率定可接
(三) 4 孔 DIRP 儀器量測與分析率定結果顯示,當測得風速 5m/s、 低紊流強度下,實驗來流靜風壓係數量測值與目前所提風向 分析率定結果間之最大誤差為 150,隨風速加快至 7m/s 時, 其最大誤差降低至 70。亦即風速越快,對 DIRP 風向率定更 有利。 (四) 經以 Irwin 於 1981 年研發歐文探針時,進行均勻流下考慮尾 流效應的影響之試驗配置為驗證對象,3 種不同簡易建築配 置下之風向定量預測結果,Cobra 與 DIRP 之定向結果均在 誤差±150範圍內,顯示 DIRP 可符合原預期定風向功能。 (五) 當 DIRP 所在位置之紊流強度在 8%以上且風速為 3m/s 以上 時,其風向率定結果,可符合誤差±150之要求。 四、主要建議事項 建議一 定向地表風速計(DIRP)於環境行人風場風向測定應用:立即可行建議 主辦機關:內政部建築研究所 協辦機關: - 行人風場定向地表風速計(DIRP)改良,經本研究執行成果,已可 兼具定向與定速功能,在實驗室執行環境行人風場委託檢測上將 據有獨占技術的優勢。 建議二 精進DIRP風向率定方法:中長期建議 主辦機關:政部建築研究所 協辦機關: -
目前 DIRP 所使用之風向率定方法,係由研究中實驗結果觀察而 得,藉由建立靜風壓係數雷達圖之形心位置,假設其指向原點為 方向為來流風向而成;是否能建立一套更具學理與提升預測精度 之方法,則更待大量實驗結果來加以研發。
第一章 緒論
第一節 研究緣起
現代都市規模日漸龐大,且建築強度逐漸趨向高容積發展,隨都市計 畫中土地使用分區與開發強度設定,以及都市逐步擴大範圍等複合效 應,都市區域環境差異便逐步顯現。都市局部區域氣流會因地形、街道、 開放空間、建築量體、方位,以及時間而有所變動,這就是都市微氣候 必須考量的重點。生態都市的風系統處理有導風、降溫、潔淨等機能, 相互共存且是都市微氣候控制的動力。依據地域風土條件及氣候資料, 城市的發展架構可以有細部對應與改變。導風包含氣流的轉向、破碎、 強化等機能,並配合都市紋理與樹林或建築開口處理等;降溫指有效把 累積的熱排除,並把周邊舒適的風導入都市人行空間;潔淨則包含汙染 物如粉塵、空氣汙染等的排除,以及新鮮空氣的供給。而這氣流的微變 化如何在城市區域完成有效通風,就是生態城市的重點之一。在都市邊 緣地區,隨季節與日夜的變化,風向與風速都不同,必須考量前述 3 項 機能的特性,並回饋到三維的都市設計管制上,讓城市擁有潔淨舒適的 通風條件。但都市如同叢林,人行高度的氣流強度會隨衝擊與阻隔逐步 降低,因此需要強化內部氣流的動力,也就是利用開放道路、公園綠地 等把氣流再度導引下降至人行空間,形成內部氣流的再加速,從而滿足 都市氣流分布的需求。街廓內部的配置形態也會影響居住區內部的氣流 大小。現代都市則是密集群聚發展,都市基盤整體固結且不透水,加上 都市建築高度、體積加大,從而形成都市強風與無風區,以及都市熱島 現象,讓城市與自然生態隔絕,也對城市的健康舒適與潔淨安全產生威 脅。建築風工程依發展主軸,可分為以下幾項: ㄧ、基礎研發:經由統計分析颱風、季風的紀錄與特性,轉化為風工程 可應用之基本資訊。另外,著手監測、調查本土大氣邊 界層之風場特性,以及利用風洞實驗及數值模擬等技 術,探討風對構造物之影響、風與環境之關係等,一併 建置成風工程應用研究之基本資料庫。 二、減災防災:透過風與構造物間之氣動力及氣彈力現象之研究,以及 風對環境造成微氣候變化之瞭解,訂定合宜之耐風設計 規範與風場環境規範,同時擬定耐風設計技術手冊,並 將規範予已簡化、程式化,增進使用之便利性,藉此有 效預防與控制風可能造成之危害與不便,提升生活品質 與保障。 三、永續發展:在地球永續經營的理念下,進一步提升風工程研發之意 涵,以有效利用潔淨的風力、綠色資源,並引用風環境 特性,避免諸如風沙、空污等可能造成對環境危害及對 人體之不適,營造健康、舒適、環保的生活空間。
第二節 文獻回顧
建築環境風場的影響,可從微小至巨大而論,在建築物興建前後的差 異,可能會造成民眾的居住環境上的不適,或是環境生態的改變,而隨 著國民所得水準提昇,人類對生活環境品質之要求已超越「安全」這基 本項目,進而對「舒適」與「健康」之生活空間有更強烈之需求。尤其 對高層住宅大樓,依環保署發布之「開發行為應實施環境影響評估細目 及範圍認定標準」,第二十六條 高樓建築,其高度一百二十公尺以上者, 應實施環境影響評估。就行人風場量測方法而言,可分為定性化與定量化二種,定性化可 於量測過程中得知現行點位之主要風向,而定量位可測得該點位之平均 與擾動風速。以下則就常用之量測方法加以介紹: (ㄧ)定性化 1.流體解析風流向 VR 可視系統 株式會社熊谷組於 107 年 3 月 19 日宣布,成功開發出可以通過最新流 體解析技術顯示風的流向 VR 可視系統,該系統將應用在城市大廈建設時 的風向設計因素。城市高樓大廈間的風的詭異走向一直是困惑環境社會 學家們的課題,熊谷組開發的風流向 VR 可視系統可以讓他們更直觀易懂 的判斷大廈風的走向,從而為城市居住環境的改善做出有效的幫助。 風流向 VR 可視系統主要包括流體解析系統和 VR 應用 2 大組成,流體 解析系統將對風速和風向進行分析,然後傳達給 VR 應用系統實現抓住風 的功能。該系統將對城市化進程帶來的環境惡化提供有效的輔助和建議。 圖 1-1 流體解析系統與 VR 可視系統 資料來源:https://kknews.cc/news/9l6rqnj.html
2.可視化方法-棉纖維 這方法主要在於決定測點迎風向及描繪流場特性,這些面先被安置 於建築物周遭,隨著來流風向不同可,沿著垂直軸自由轉動,搭配高速 攝影機或照相機採不同快門速度的設定,可即時擷取建築物周遭流場的 風向影片,ㄧ般而言,快門速度設定小於 4 秒之拍攝結果較能準確判定 出風向。 圖 1-2 棉纖可視化示意圖 資料來源:參考書目 1 3.可視化-細砂 於建築模型附近放置充滿細砂均勻薄層,然後風洞之風場以模擬暴露 在空氣中大氣邊界層條件下具有恆定風速的邊界層,當建築物行人風場 形成,風速持續增強下,越來越多的細砂將因風速增強而被掃除。搭配 照片拍攝於不同風速下之細砂掃除情形,就可據以研判行人風場風向特 性。 圖 1-3 細砂可視化示意圖 資料來源:參考書目 1
4.粒子圖像測速儀(Particle Image Velocimetry measurement) 粒子圖像測速法,是七十年代末發展起來的一種瞬態、多點、無接 觸式的鐳射流體力學測速方法。近幾十年來得到了不斷完善與發展,PIV 技術的特點是超出了單點測速技術的局限性,能在同一瞬態記錄下大量 空間點上的速度分佈資訊,並可提供豐富的流場空間結構以及流動特性。 PIV 技術除向流場散佈示蹤粒子外,所有測量裝置並不介入流場。PIV 測 速方法有多種分類,無論何種形式的 PIV,其速度測量都依賴於散佈在流 場中的示蹤粒子,PIV 法測速都是通過測量示蹤粒子在已知很短時間間隔 內的位移來間接地測量流場的瞬態速度分佈。若示蹤粒子有足夠高的流 動跟隨性,示蹤粒子的運動就能夠真實地反映流場的運動狀態。因此示 蹤粒子在 PIV 測速法中非常重要。在 PIV 測速技術中,高質量的示蹤粒 子要求為:(1)比重要盡可能與實驗流體相一致;(2)足夠小的尺度;(3) 形狀要盡可能圓且大小分佈盡可能均勻;(4)有足夠高的光散射效率。 雖然經由拍照判讀可同時求得自由風場中之風速與風向,但對於複雜建 築地況中之行人風場而言,卻不易藉由示蹤粒子求得。 5.雷射都普勒速度儀 (Laser-Doppler Anemometry) 雷射都普勒速度儀使用在風場中彼此交叉的兩激光束,可精確測量流 體的速度,屬非侵入式測量技術,儀器如圖 1-4 所示。 圖 1-4 雷射都普勒速度儀 資料來源:參考書目 2
6.煙霧流場可視化 於特定測點量測 PLW 的缺點是僅能就特定點取得定量數據,但結合可 見煙霧流入模型建築物中的方法,便可同時觀察到整體風場流動情形。 (圖1-5)所示可以通過觀察來確定煙流模式如何影響行人在街道行走的 舒適度。 圖 1-5 煙霧可視化(下沉氣流) 資料來源:參考書目 3 目前本所風雨風洞實驗室所採用的煙流風場可視化做主要設備包括 煙霧產生器、煙霧導引管、氫離子雷射光幕設備及其冷卻系統、數位攝 影器材等,各設備規格性能如下: l. 煙霧產生器: Antari 廠牌, Fogger X-530 型,熱能為2200W ,煙霧釋 放壓力為17 .5KPa, 100%煙霧釋放濃度下之釋放率為6min/L。 2. 煙霧導引管:制式直徑1 英吋鍍鋅鋼管,長度有15cm 及30cm 兩種。 3. 氫離子雷射光幕設備:美國Coherent 廠牌, Innova 70C-5 型,藍/綠多 重光5W,單頻雷射系統。 4. 雷射密閉循環式冷卻系統:台灣R I A IR 廠牌, RC-5 型,水冷式系 統,冰水槽130L 。
5. 數位攝影器材:數位相機OLYMPUS 廠牌, E1 型。數位攝影機JVC 廠 牌'GZ-MG50型。 煙霧產生器 氫離子雷射光幕 光源噴頭 冷卻系統 圖1-6 煙流可視化系統 資料來源:本研究 (二)定量化 1.熱線式風速計 可測得風場之平均與擾動風速,但卻無法測得風向,其運作原理係 將一根細的金屬絲放在流體中,通電流加熱金屬絲,使其溫度高於流體 的溫度,因此將金屬絲稱為『熱線』。當流體沿垂直方向流過金屬絲時, 將帶走金屬絲的一部門熱量,使金屬絲溫度下降。常用的有兩種方法: 一是定電流法,即加熱金屬絲的電流不變,氣體帶走一部分熱量後金屬 絲的溫度就降低,流速愈大溫度降低得就愈多;測得金屬絲的溫度則可 得知流速的大小。另一種是定電阻法(即定溫度法),改變加熱的電流使 氣體帶走的熱量得以補充,而使金屬絲的溫度保持不變(也稱金屬絲的 電阻值不變);這時流速愈大則所需加熱的電流也愈大,測得加熱電流值
則可得知流速的大小。
圖 1-7 Hot wire 與校正系統 資料來源:本研究
2. 歐文探針 Irwin Probe (IRP)
Irwin 於 1981 年所發展出來的無方向性地表風速計測器來進行[4,5],其原理 是利用管與管中之細管(即管中管,內外兩管共一中心軸,但內管突出較高), 兩者間之壓力差,參照預先率定之結果,可迅速、正確地量測到行人高度上之 水平風速。如下圖1-8 所示。而其風速計算方式如下式所示,其中 u 為風速, △P 為上述兩內外管之壓力差,α、β 則為公式常數。 進行試驗前須率定每個地表風速計(Irwin Probe) 之 α、β 值方能進行風速計算, 本實驗室在研究時採用三維動態皮托管進行率定,如圖1-9 所示。將三維動態 皮托管探針放置接近地表風速計處,同時量測8 個風速點,將動態皮托管及地 圖 1-8 地表風速計 剖面圖 圖 1-9 使用動態皮托管 圖 1-10 地表風速計校正回歸 線 P u
表風速計之壓力差繪製如圖1-10 所示,進行線性迴歸即可得 α、β 值。 3. 眼鏡蛇探頭 (Cobra Probe) 眼鏡蛇探頭是一種多孔壓力探頭(圖 1-11),可提供動態三維風速和局部 靜態壓即時測量[6],配合裝三維移動機構,使眼鏡蛇探頭能移動到所需 位置測量PLW。移動機構如圖 1-12 所示,可於整體模型上之建築物或庭 院入口處與空間道路點等進行測量。 圖 1-11 眼鏡蛇探頭 資料來源:參考書目 6 圖 1-12 眼鏡蛇探頭與移動機構配置 資料來源:參考書目 7 4.紅外線熱成像技術 紅外線掃描技術可同時進行特定測點與區域面範圍內之風速量測。 Yamada 等人[2]和 Wu 及 Stathopoulos [8]已經使用這種技術測量行人風
場,利用真實存在於建築物表面與附近行人風場間熱傳遞效應,得到溫
度分佈的熱圖像模型,經Wu 和 Stathopolous 使用紅外線評估各種建築物
配置下Pedestrian Level Wind (PLW)的熱成像技術,得到的結論是:這種技 術應可用於研究整體風的影響,而不僅僅是針對特定風速測點。
5.手機熱影像儀的應用
手機的功能隨著 2007 年 Apple 的 iPhone 問世後,Google Android 陣營 也加入市場競爭,帶來功能與應用的革命性變化。行動電話原本用來通 話用的功能外,加入無線通訊與定位和數位影像的拍照,使手機的功能 無遠弗屆,產業也因此產生很大的變化,如Uber,這自人類有馬車以來, 最大的計程車營業型態的變化,如果沒有手機的定位、地圖、傳遞Email 的功能,Uber 則無法運作。 隨著我們把各種 3C 元件,都縮小塞進這手掌可握持的小方塊,原本照 像機、個人電腦、GPS 定位器,一個一個加進這小小的空間。而在工程 上來說,近年來最大的變革,可說是把熱影像功能透過外加的小元件整 合手機的功能,將帶來極大的變革。所謂熱影像儀,又稱熱像儀,或紅 外線熱成像儀等,是一種對物體散發出的紅外線,進行感光成像的設備。 在物理學上,熱不是對溫度描述的形容,熱是能量傳遞的過程。熱的傳 遞透過三種方式:傳導、對流和輻射。輻射是電磁波的一種,涵蓋不同 波長的電磁波;光,在物理學是電磁波的一種,輻射能包含紫外線,可 見光及紅外線等不同的波長,讓我們可以對紅外線的搜集與分析,形成 熱影像的應用。我們常在機場出入口,看到用來偵測人體是否發燒的影 像,就是熱影像的應用之一。熱像儀在不同的解析度與不同的功能有不 同的價錢。因為手機的普及與成本一再降低,熱像儀與手機的整合,使 熱像儀成本也降低。而國際上熱像儀的大廠FLIR,於 2015 年 10 月推出
Android 手機,亦可使用的 FLIR ONE 熱像儀,其可量測溫度由攝氏零下 40 度到 120 度,距離可達 30 米(經實測其實超過 30 米亦可應用),解析 度 640*480 像素,在我們建築土木的工程上,應用可拿來作漏水檢測, 大樓外牆磁磚或石材安全鑑別,配電盤異常,空調分析與建築節能規劃 等等,而以往需仰賴最少數萬至數十萬元才能辦到的工具,今只要 2 萬 元以下就可辦到,且其輕便與手機整合,尚可利用無人機,背負飛上天 空進行拍照(比如大樓外牆)或偵察(比如火場消防)的工作。
第三節 研究目的與方法
定向地表風速計(Directional Irwin Probe, DIRP)經 106 年自辦研 究成果,已可同時量測地表風向與風速,為提升解析精度減低風向判 別誤差,將深究風向率定方法並精進風場量測技術。由於 Irwin 於 1981 年研發非定向地表風速計時,考量風環境流場及建築配置多樣性造成 風場特徵不同,進行 3 組比對實驗。本案為能擴展並確認 DIRP 可應用 性,將搭配煙流可視化實驗,進行前揭地表風速風向量測,期能更具 體且精確的提供建築物開發前後對於環境風場的影響,有利於提升環 境風場評估結果,對於強風來流風向的判斷將有助於建築物設計(座 向、出入口)或防風設施(植栽、隔柵)的配置。 經定向地表風速計與煙流可視化實驗風向量測比對,可提升 DIRP 應 用性。DIRP 可兼具定向與定速功能,在未來執行環境行人風場檢測上, 實驗室將具有獨占技術的優勢。由於風工程所涉及的專業領域甚廣, 且研究與分析所需的應用工具需求多,若能開發新型的量測技術,可 簡化分析或計算的複雜度,並且增加驗證效率。因此,本計畫將參考 先進國家的作法與趨勢,研發屬於本土化的實驗量測技術,供做後續 儀器設備設計及環境風場量測評估等參考。
第二章 定向歐文探針研發
由於行人風場風洞實驗結果可作為評估都市開發中環境風場舒 適性與否的關鍵指標,過程中常針對不同風向角及配合街廓地形等, 需配置為數不少之地表風速計。因此亟需一種無需因風向角轉變或實 驗調整安裝,而造成量測上不便的風速計來測得行人場風速與風向。 106 年自辦案「應用定向性歐文探針於建築環境風場量測分析研究」 研究成果中,已初步完成 6 孔與 4 孔定向歐文探針風向量測與率定方 法。第一節 量測與分析方法
標準歐文探針尺寸( Irwin Probe, IRP)<d=1.7, di=1.2, h=1.7,
D=2.6, H=5.1mm>,當流體流經壓力量測孔時,其速度降為零,所量 得為總壓(Pstagnation),另外由靜壓量測孔可量得靜壓(Pstatic),如此由總 壓與靜壓的差值,即可應用柏努利方程式求得風速(文獻[9])。目前用 於調查的行人風場的風速傳感器是幾年前由歐文(Irwin)研發引入的。 該 Irwin 探針用於測量地表面附近邊界層區域風速的平均值和較低頻 率波動,簡化了行人風場舒適度的測量和分析。它已被許多研究和商 業試驗設施用使用。文獻[10] Emanuela Palombi, Nick Cook (2010) 近 年也開始研發新型 Irwin 探針,期望能被用於測量風速和風向。其軸 對稱設計類似於 Irwin 探針;然而,其獨特的特徵是圍繞中心管的基
部等距離地定位的六個孔組組成,並定義為 7 孔 Directional Irwin 傳 感器。在管的基底處,在圓筒的頂表面處有六個孔圍繞中心管以 60° 間隔佈置(圖 2-2),以檢測這種表面流動模式。 當六個表面孔全聚集在一個增壓室中,探頭的作用就像標準的 IRP。當六個表面孔單獨測量壓力時,探針所測得之風壓變化,對於 風向具有相當敏感度。圖 2-3 顯示了六個表面管和中心管於極坐標上 的平均風壓係數雷達圖,其中參考動態風壓係以中心管高度處所測得 數據為基準。將所量得的壓力數據加以分析發現,風向角的分布可經 由傅立葉係數與平均偏移值合成。 由於表面管量測點有限,以 7 管 IRP 來說,其量測角度間隔為 60 度,主要風向角未必洽巧落在量測的點位上,因此需要建立一個 適合的分析方法來率定其主要風向。依文獻[10]所述,風向角與平均 風壓係數間可以應用傅立葉係數來表示,且可忽略高頻項次所帶來的 微小差異,因此,在實際率定本研究所發展之定向式歐文探針前 (Directional Irwin Probe, DIRP),先以該文獻之數據資料加以計算驗證 二案實驗結果,以說明率定方法之合理性。
然對於 4 孔 DIRP 的風向率定方法,迄今文獻資料尚無明確分析 方法。因此,本案假設 4 孔 DIRP 所測得之無因制平均靜壓係數,其
圖 2-1 IRP 幾何尺寸 資料來源:參考書目[4]
P
V
式 2-1 α、β分別為線性回歸所得參數圖 2-2 Directional Irwin Probe 資料來源:參考書目[10]
圖 2-3 兩不同方向角下平均壓差比(中心管與表面管) 資料來源:參考書目[10]
第二節 DIRP 風速校正與風向率定
在進行行人環境風場試驗時,於風洞實驗中須定義行人高度的風 場,在風速的量測上,通常需要在不同的風向情況下,量測許多接近 地表、不同位置的測點。由於邊界條件的複雜,導致各測點風向的高 度不準確性。再加上紊流強度高,傳統之量測工具如皮托管與熱流速 儀使用起來相當困難,其誤差亦大。本案之行人高度風速量測採用 Irwin[4]於1981 年所發展出來的無方向性地表風速計測器來進行。 試驗前須率定每個地表風速計(Irwin Probe) 之α、β值方能進行 風速計算,本研究以用熱線式風速計進行率定,如圖2-4 所示。將熱 線式風速計放置接近地表風速計處,量測數個不同風速點,將熱線式 風速計及地表風速計之壓力差繪製如圖2-5 所示,進行線性迴歸即可 得α、β值。 圖2-4 熱線式風速計與地表風速計校正 資料來源:本研究y = 1.7814x + 0.3937 R2 = 0.9991 0 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 SQRT(ΔP) W ind spe ed (m /s) 圖2-5 地表風速計校正回歸線 資料來源:本研究 由於熱線式風速計於本研究中為校正 DIRP 的重要儀器,故其校 正作業對於風速量測結果是否準確,有這重大的影響,因此將其校正 程序說明如附錄一。 至於風向率定方法,本研究係以 4 孔 DIRP 所測得之無因制平均 靜壓係數,經繪製而成之雷達圖,取其形心位置朝原點方向為率定風 向。
第三節 前期研究成果
可歸納如下: 一、 開發之定向歐文探針(DIRP)除能具備一般歐文探針(中央管)可 量測地表風速之性能外,可同時量測表面管之靜風壓係數,並 可作為主要來流風向的判定依據。 二、 4 孔 DIRP 儀器量測與分析率定結果顯示,當實驗風速 5m/s 低 紊流強度下,實驗來流靜風壓係數量測值與目前所提風向分析 率定結果間之最大誤差為 150,隨風速加快至 7m/s 時,其最大三、 6 孔 DIRP 儀器量測與分析率定結果顯示,當實驗風速於 6.3 m/s 時,實驗量測值與分析率定結果間之最大誤差為 90,隨風速加 快至 6.6m/s 時,其最大誤差降低至 70。 四、 不論 4 孔或 6 孔 DIRP 於低風速階段(3~4m/s),其量測與分析值 間誤差已超過 150,其原因可能歸屬二方向,其一為所採用分析 方法無法解析,當量測所得靜壓係數趨於相近時(4 孔雷達圖形 越接近菱形非錐狀、6 孔雷達圖形越接近正六邊形),本案所用 方法即無法辨識出主要來流風向。其二為風變因影響(如風速與 紊流強度等),由於目前試驗配置是於均勻低紊流強度(約 1~2%) 下進行風向率定,變因僅為風速大小,由於環境行人風場的風 速特徵多為低風速(一般 10~3m/s)、高紊流強度,故紊流強度大 小之影響仍尚待釐清。 五、 實驗與率定風向結果於相對高風速低紊流強度下(V=7~5m/s、 TI=1.5~2%)及低風速高紊流強度下(V=3、TI=14.1%),且由於尚 無文獻資料可供參考,因此採誤差±150為可接受範圍。
第三章 實驗規劃與量測分析
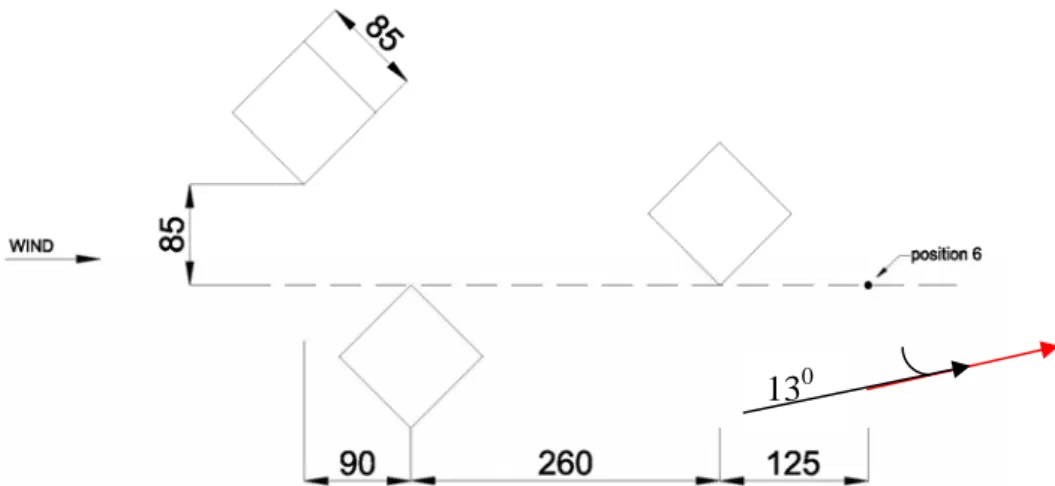
本期研究為能將風向可視化並與 4 孔 DIRP 所量測得風向加以比 對,將參考 Irwin 於 1981 年研發歐文探針時,進行均勻流下考慮尾流 效應的影響,以矩形柱體進行了 3 種不同配置下地表風速風向量測(圖 3-1),搭配低煙霧冰水機所製造之煙流及紅外線熱影像儀拍攝來捕捉 主要來流風向,上述是屬於風向定性的部分。為能更進一步將 DIRP 量測結果加以定量化並探討其準確性,研究中以三維風速量測儀器 Cobra 同時紀錄風速,並據以計算其主要來流風向,將其結果與 DIRP 相互比較。 圖 3-1 實驗矩形柱體配置第一節 風洞實驗設備
一、 風洞設備 風洞本體為一垂直向的封閉迴路系統,總長度為77.9m,最大寬 度為9.12m,最大高度為15.9m,風洞頂部為可調式上蓋板,以維持測 試段壓力梯度為零,並將阻塞比降到最低。為能於較穩定風速區域內 進行DIRP風速量測與風向率定,減少因空氣與地面摩擦產生之渦 流,影響實驗設定風速穩定性,本次試驗於第一測試段之第一旋轉盤 進行,本測試段長36.5 公尺、寬4 公尺、高2.6 公尺,最大風速可達 30 公尺/秒。 圖 3-2 風洞本體側視圖 資料來源:本研究 二、Cobra 風速計(用途:校正 DIRP 中央管風速) 眼鏡蛇三維動態風速計是 4 孔壓力探頭,用來測量三維風速和靜態 壓力,並且能量測響應頻率大於 2kHz,風向角在±45°内的紊流。除 三維風速量測 (範圍 2~100 m/s)並用來判斷來流風向外,可同時取得圖 3-3 Cobra 外觀 資料來源:本研究 三、電子式壓力掃描器 PSI(詳細操作流程詳附錄二) 3.1 氣體壓力數據擷取主機 設備規格 1. 最大支援 8 組 64 頻道電子式壓力掃描模組 2. 量測壓力可以 Pa 為單位輸出,量測數據可透過乙太網路線採 TCP/UDP 通訊協定傳輸至電腦 3. 數據處理速率:325Hz/chs 4. 訊號傳輸解析度:±0.003% 5. 操作溫度範圍:0℃ to 55℃ 圖 3-4 壓力掃描主機 資料來源:本研究
設備規格 1. 提供氣體壓力數據擷取主機之電源、訊號傳輸及硬體觸發,可透過 乙太網路線串連電腦與氣體壓力數據擷取主機 2. 供應電流範圍:0.8~1.6 安培 3. 供應電壓範圍:18~36 伏特直流電壓 圖 3-5 乙太介面電源供應器 資料來源:本研究 3.3 64 頻道電子式壓力掃描模組 設備規格 1. 量測範圍:±1k Pa 2. 靜態量測精度:±1.5 Pa 3. 掃描器頻道數量:64 個/組 4. 掃描器模組量測接頭為可快速拆卸式,管徑 0.04 英吋±0.004 英吋 5. 操作溫度範圍:0℃ to 55℃ 6. 具溫度補償功能
圖 3-6 壓力掃描器 資料來源:本研究 3.4 外接氣體壓力源 外接氣體之壓力須調整至 80~125psi,若使用高壓鋼瓶氣體,則須 確認高壓鋼瓶內部壓力高於 200 psi 以避免鋼瓶內之雜質與水氣汙染 儀器。 圖 3-7 外接氣體 資料來源:本研究 四、低煙霧冰水機 Antari 公司製造之 ICE-101 低煙霧冰水機,用以製造低溫煙霧,當 流經建築群體時會因障礙物導致流場溫度有所變化。詳細操作流程詳
圖 3-8 Antari 低煙霧冰水機 資料來源:本研究 五、紅外線熱顯像儀 設備規格(需搭配手機) 1.動態範圍:-20 °C 到 400 °C (-4 °F 到 752 °F) 2.精度:±3°C 或 ±5% 3.影片和靜態圖像顯示/採集:儲存為 1440×1080 4.檔案格式:相片–jpeg 輻射圖像格式,影像–MPEG-4 (影片格式) 5.顯象方式:灰色(白色熱),最熱,最冷,鐵,彩虹,對比度,Arctic,
Lava & Wheel。
圖 3-9 紅外線熱顯像儀 資料來源:本研究
第二節 實驗規劃
行人風場是由許多不同因素交互影響而成的複雜流體運動,影響參 數包括風速、風向、建築物外觀與周遭建物等,由於風場特性種類繁 多包含迎風面渦旋、建物尾流、穿堂風、角隅強風、遮蔽效應、金字 塔效應、縮流效應及渠化效應等[11]。本研究中共先行規劃 3 種不同 之建築物周邊氣流特性來進行風向實驗,並分別以 4 孔 DIRP 進行風 向率定、三維 Cobra 風速計及紅外線熱顯像拍攝煙流體運行軌跡加以 進行比對。 由於 DIRP 研究尚處於開發測試階段,為能先準確掌握其風速量測 與風向率定等之精確度,採用均勻流方式進行。DIRP 之尺寸設計與 樣本如圖 3-13 至圖 3-14 所示: ㄧ、角隅強風(Case 1) 當氣流由建築物的兩旁經過時,氣流會有加速的現象,並在角隅產 生渦流分離,導致建物角隅處有較強風速。 圖 3-10 實驗規劃(ㄧ)角隅強風 資料來源:本研究二、尾流效應(Case 2) 當風遇到建築物時,會在建築物的背風面形成一個紊流尾流負壓 區,其特性會受到建物外形、風向及周遭建物影響。 圖 3-11 實驗規劃(二)尾流效應 資料來源:本研究 三、遮蔽效應(Case 3) 近似高度與規模的建築群比鄰而立時,對於迎面而來的氣流會產生 遮蔽效應。 圖 3-12 實驗規劃(三)遮蔽效應
圖 3-13 DIRP(4 孔)設計圖 資料來源:本研究 圖 3-14 DIRP(4 孔)樣本 資料來源:本研究
第三節 Cobra 與 DIRP 風速風向量測
Case 1
角隅強風 分別以 Cobra 與 DIRP 於該點位上進行不同風速下,其平均風速與風向來量測加以比對,試驗資料如表 3-1 與 3-2,試驗配置如上圖。 由試驗資料可以發現,在風速量測上,隨著風扇轉速由 30Hz 上升至 110Hz , Cobra 於 該 點 為 上 所 量 測 到 的 風 速 由 2.40m/s 提 高 至 9.20m/s,紊流強度介於 8.29~12.4%之間;同時間,DIRP 所量測到的 風速由 2.34m/s 提高至 9.22m/s,期間 Cobra 與 DIRP 之誤差最大為 3.72%。風向量測上,於該角偶點位上,Cobra 所測得之平均風向為 300,DIRP 為 290,各風速下風向比對誤差最大為 70,DIRP 上 4 點之 靜風壓係數數據(表 3-3)與雷達圖(圖 3-17),顯示 DIRP 功能性符合 前期研究±150範圍內之要求,實測照片如圖 3-18。 表 3-1 風速比對(CASE1) 風扇轉速(Hz) 30 40 50 60 70 80 90 100 110 Cobra (m/s) 2.40 3.10 4.20 5.20 5.70 6.70 7.50 8.40 9.20 DIRP (m/s) 2.34 3.22 4.19 5.03 5.85 6.66 7.55 8.43 9.22 差異(m/s) 0.06 -0.12 0.01 0.17 -0.15 0.04 -0.05 -0.03 -0.02 紊流強度(%) Cobra 12.4 10.1 8.7 8.29 9.27 9.11 9.64 9.69 9.58 資料來源:本研究 表 3-2 風向比對(CASE1) 風扇轉速(Hz) 30 40 50 60 70 80 90 100 110 平均 Cobra 33 30 26 30 31 29 30 30 30 30 風向 (度) DIRP 39 23 27 27 28 29 28 29 29 29 誤差(度) +6 -7 +1 -3 -3 0 -2 -1 -1 -1 資料來源:本研究
圖 3-15 應用 Cobra 風向量測結果(CASE 1) 資料來源:本研究 圖 3-16 應用 DIRP 風向量測結果(CASE 1) 資料來源:本研究 表 3-3 DIRP 靜風壓係數風向率定結果(CASE1) 風速 角度 2.34 3.22 4.19 5.03 5.85 6.66 7.55 8.43 9.22 9.23 9.26 0 1.41391 1.47468 1.278924 1.163714 1.210848 1.21392 1.207843 1.206064 1.270109 1.240706 1.270841 90 1.22217 1.085494 0.931878 0.907531 0.917118 0.874694 0.889869 0.894385 0.885606 0.889519 0.891117 180 0.766155 0.582935 0.384071 0.402538 0.329197 0.163229 0.221614 0.221597 0.029685 0.024324 0.03839 270 0.693657 0.698214 0.480245 0.520448 0.447195 0.298373 0.364715 0.353978 0.196231 0.205717 0.195412 率定 風向 39 23 27 27 28 29 28 29 29 29 29 DIRP 290 Cobra 300
0 0.5 1 1.5 0 90 180 270 Cobra風向:330 DIRP風向:390 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:230 DIRP 風速 2.34 m/s DIRP 風速 3.22 m/s 0 0.5 1 1.5 0 90 180 270 Cobra風向:260 DIRP風向:270 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:270 DIRP 風速 4.19 m/s DIRP 風速 5.03 m/s 0 0.5 1 1.5 0 90 180 270 Cobra風向:310 DIRP風向:280 0 0.5 1 1.5 0 90 180 270 Cobra風向:29 DIRP風向:290 DIRP 風速 5.85 m/s DIRP 風速 6.66 m/s
0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:280 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:290 DIRP 風速 7.55 m/s DIRP 風速 8.43 m/s 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:290 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:290 DIRP 風速 9.22 m/s DIRP 風速 9.23 m/s 0 0.5 1 1.5 0 90 180 270 Cobra風向:300 DIRP風向:290 DIRP 風速 9.26 m/s 圖 3-17 風向量測比對結果(CASE 1) 資料來源:本研究
圖 3-18 CASE1 試驗配置圖 資料來源:本研究
Case 2
尾流效應 於每一點位分別進行 3 次風壓與風速量測,試驗時以建物高度處風 速為參考風速 10 m/s,分別以 Cobra 與 DIRP 量測每點平均風速與風 向來加以比對,試驗資料如下表,試驗配置如上圖,相關結果敘述如 下: 1.在點 1 上Cobra 於該點所量測到的平均風速為 6.19m/s,平均紊流強度為 43.6%;同時 DIRP 所量測到的平均風速為 6.62 m/s,兩者間平均誤 差為 7.0%(表 3-4)。風向量測上,於該點 Cobra 所測得之平均風向為 3480,DIRP 為 3500,3 次風向試驗比對之最大誤差為 30(圖 3-21~圖 3-23)。 2.在點 2 上 Cobra 於該點所量測到的平均風速為 8.32m/s,平均紊流強度為 24.6%;同時 DIRP 所量測到的平均風速為 9.31 m/s,兩者間平均誤 差為 12.0%(表 3-5)。經檢視 Cobra 三維風速原始資料發現,其垂直 向風速是其他點位的 10 倍,且圖片資料發現 Cobra 與 DIRP 兩者間 於該點位上幾乎相碰觸,彼此間相互影響所成。風向量測上,於該點 Cobra 所測得之平均風向為 3460,DIRP 為 3450,3 次風向試驗比對之 最大誤差為 140(圖 3-21~3-圖 23)。 3.在點 3 上 Cobra 於該點所量測到的平均風速為 4.85m/s,平均紊流強度為 26.2%;同時 DIRP 所量測到的平均風速為 5.08 m/s,兩者間平均誤 差為 4.7%(表 3-6)。風向量測上,於該點 Cobra 所測得之平均風向為 10,DIRP 為 140,3 次風向試驗比對之最大誤差為 150 (圖 3-21~圖 3-23)。
4.在點 4 上 Cobra 於該點所量測到的平均風速為 5.42m/s,平均紊流強度為 26.1%;同時 DIRP 所量測到的平均風速為 5.53 m/s,兩者間平均誤 差為 2.0%(表 3-7)。風向量測上,於該點 Cobra 所測得之平均風向為 30,DIRP 為 10,3 次風向試驗比對之最大誤差為 30(圖 3-21~圖 3-23)。 綜整 DIRP 上 1~4 點之靜風壓係數數據(表 3-9)與雷達圖(圖 3-21 至 3-23),顯示 DIRP 功能性符合前期研究±150範圍內之要求,實測照 片如圖 3-24。 表 3-4 點 1 風速比對(CASE2) 點 1 風速(m/s) Cobra DIRP 差異(m/s) 紊流強度 (%) test1 6.20 6.64 -0.44 44.4 test2 6.18 6.61 -0.43 43.6 test3 6.18 6.62 -0.44 42.7 平均 6.19 6.62 -0.43 43.6 資料來源:本研究 表 3-5 點 2 風速比對(CASE2) 點 1 風速(m/s) Cobra DIRP 差異(m/s) 紊流強度 (%) test1 8.31 8.94 -0.63 24.7 test2 8.32 9.14 -0.82 24.6 test3 8.34 9.87 -1.53 24.5 平均 8.32 9.31 -0.99 24.6 資料來源:本研究
點 3 風速(m/s) Cobra DIRP 差異(m/s) 紊流強度 (%) test1 4.97 5.06 -0.09 25.1 test2 4.84 5.07 -0.23 26.3 test3 4.75 5.10 -0.35 27.1 平均 4.85 5.08 -0.23 26.2 資料來源:本研究 表 3-7 點 4 風速比對(CASE2) 點 4 風速(m/s) Cobra DIRP 差異(m/s) 紊流強度 (%) test1 5.12 5.43 -0.31 28.1 test2 5.66 5.52 0.14 24.4 test3 5.49 5.63 -0.14 25.7 平均 5.42 5.53 -0.11 26.1 資料來源:本研究 表 3-8 各點平均風向比對(CASE2) 風向(度) 點 1 點 2 點 3 點 4 Cobra 348 346 1 3 DIRP 350 345 14 1 誤差(度) 2 1 13 2 資料來源:本研究 120 10 30 140
資料來源:本研究 圖 3-20 應用 DIRP 風向量測結果(CASE 2) 資料來源:本研究 表 3-9 DIRP 靜風壓係數風向率定結果(CASE2) 風速 角度 點 4-3 點 3-3 點 2-3 點 1-3 點 4-2 點 3-2 點 2-2 點 1-2 點 4-1 點 3-1 點 2-1 點 1-1 0 0.950555 0.985654 4.42076 1.263867 0.99009 1.08205 2.040942 1.332677 0.980791 0.965229 1.657497 1.380959 90 0.906167 0.918061 2.041268 1.170282 0.924479 0.973681 1.207154 1.162541 0.917191 0.91631 1.187813 1.216074 180 0.842939 0.870161 3.670541 1.147791 0.878523 0.908351 1.904574 1.117655 0.861698 0.865478 1.556048 1.172085 270 0.89983 0.898639 2.2702 1.188216 0.925193 0.926178 1.279871 1.20651 0.91699 0.888433 1.190221 1.247465 率定 風向 3 10 343 351 360 15 332 348 0 16 359 351 備註:點 1-2 代表於點位 1 進行第 2 次試驗,於類推 資料來源:本研究 0 1 2 0 90 180 270 DIRP風向:3510 Cobra風向:3480 0 1 2 0 90 180 270 Cobra風向:3460 DIRP風向:359 0 點位 1 風向量測比對 點位 2 風向量測比對結 100 140 10 150
0 1 2 0 90 180 270 Cobra風向:10 DIRP風向:160 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:30 DIRP風向:00 點位 3 風向量測比對 點位 4 風向量測比對 圖 3-21 各點位風向量測比對結果-第 1 次試驗(CASE 2) 資料來源:本研究 0 1 2 0 90 180 270 DIRP風向:3480 Cobra風向:3480 0 1 2 0 90 180 270 Cobra風向:3460 DIRP風向:3320 點位 1 風向量測比對 點位 2 風向量測比對結 0 1 2 0 90 180 270 Cobra風向:10 DIRP風向:150 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:30 DIRP風向:00 點位 3 風向量測比對 點位 4 風向量測比對 圖 3-22 各點位風向量測比對結果-第 2 次試驗(CASE 2)
資料來源:本研究 0 1 2 0 90 180 270 DIRP風向:3510 Cobra風向:3490 0 1 2 3 4 5 0 90 180 270 Cobra風向:3460 DIRP風向:3430 點位 1 風向量測比對 點位 2 風向量測比對結 0 1 2 0 90 180 270 Cobra風向:10 DIRP風向:100 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:30 DIRP風向:30 點位 3 風向量測比對 點位 4 風向量測比對 圖 3-23 各點位風向量測比對結果-第 3 次試驗(CASE 2) 資料來源:本研究 圖 3-24 CASE2 試驗配置圖
Case3 遮蔽效應 於該點位上分別進行 3 次量測,試驗時以建物高度處風速為參考風速 =15m/s,分別以 Cobra 與 DIRP 量測每點平均風向來加以比對,試驗 資料如下表 3-10。Cobra 於該點所量測到的平均風速為 2.8 m/s,平 均紊流強度為 42.4%。風向量測上,於該點 Cobra 所測得之平均風向 為 3470,DIRP 為 3470,3 次風向試驗比對之最大誤差為 20,其靜風壓 係數數據(表 3-11)與雷達圖(圖 3-25),顯示 DIRP 功能性符合前期研 究±150範圍內之要求,實測照片如圖 3-27。 表 3-10 風向比對(CASE 3) 點 6 第 1 次試驗 第 2 次試驗 第 3 次試驗 平均 風速(m/s) 2.7 3.0 2.7 2.8 紊流強度(%) 44.3 36.4 46.4 42.4 Cobra 347 348 347 347 風向角(度) DIRP 345 348 349 347 資料來源:本研究
表 3- 11 DIRP 靜風壓係數風向率定結果(CASE3) 組別
角度 Test 1 Test 2 Test 3
0 0.93023 0.939895 0.956524 90 0.934944 0.945334 0.986349 180 0.858774 0.865102 0.906703 270 0.954491 0.961869 0.996289 率定風向 345 348 349 資料來源:本研究 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:3470 DIRP風向:3450 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:3480 DIRP風向:3480 風向量測比對(Test1) 風向量測比對(Test2) 0 0.5 1 1.5 2 0 90 180 270 Cobra風向:3470 DIRP風向:3490 風向量測比對(Test3) 圖 3-25 均風向量測比對結果(CASE 3) 資料來源:本研究
圖 3-26 應用 Cobra 與 DIRP 風向量測結果(CASE 3) 資料來源:本研究 圖 3-27 試驗配置圖(CASE 3) 資料來源:本研究
第四節 煙流顯象
目前已完成 3 個實驗配置之熱煙顯象擷取(圖 328-至 3-30),發現以 紅外線配合低溫濃煙顯象,主要受限於目前所用儀器解析度不足難以 準確定出風向角,但對於瞭解整體風圍繞建物之流動特性仍有所助 益,可用以定性化研究。 130圖 3-28 CASE1 可視化結果 資料來源:本研究 圖 3-29 CASE2 可視化結果 資料來源:本研究 圖 3-30 CASE3 可視化結果 資料來源:本研究
第四章 結論與建議
第一節 結論
一、 結合低溫煙霧與紅外線熱顯像裝置可將主要來流風向加以可視 化,經採用均勻流方式進行 3 種不同簡易建築配置之煙流可視 化與 4 孔 DIRP 風向量測比對,所呈現之趨勢相符,可作為風向 定性的方法之一。 二、 從目前試驗資料來看,當紊流強度達 8.3%以上時,即使 DIRP 測得之風速低於 3 m/s,其率定風向結果與應用 Cobra 所測得之 風向差異仍在±150 ,因此採誤差±150為風向率定可接受範圍。 三、 4 孔 DIRP 儀器量測與分析率定結果顯示,當測得風速 5m/s、低 紊流強度下,實驗來流靜風壓係數量測值與目前所提風向分析 率定結果間之最大誤差為 150,隨風速加快至 7m/s 時,其最大 誤差降低至 70。亦即風速越快,對 DIRP 風向率定更有利。 四、 經以 Irwin 於 1981 年研發歐文探針時,進行均勻流下考慮尾流 效應的影響之試驗配置為驗證對象,3 種不同簡易建築配置下之 風向定量預測結果,Cobra 與 DIRP 之定向結果均在誤差±150範 圍內,顯示 DIRP 可符合原預期定風向功能。 五、 當 DIRP 所在位置之紊流強度在 8%以上且風速為 3m/s 以上時, 其風向率定結果,可符合誤差±150之要求。第二節 建議
建議一 定向地表風速計(DIRP)於環境行人風場風向測定應用:立即可行建議協辦機關: - 行人風場定向地表風速計(DIRP)改良,經本研究執行成果,已可兼 具定向與定速功能,在實驗室執行環境行人風場委託檢測上將據有獨 占技術的優勢。 建議二 精進DIRP風向率定方法:中長期建議 主辦機關:政部建築研究所 協辦機關: - 目前 DIRP 所使用之風向率定方法,係由研究中實驗結果觀察而得, 藉由建立靜風壓係數雷達圖之形心位置,假設其指向原點為方向為來 流風向而成;是否能建立一套更具學理與提升預測精度之方法,則更 待大量實驗結果來加以研發。
附錄一 低煙霧冰水機操作程序
ㄧ、機器安裝 (一) 本項程序書適用於使用 Antari 公司製造之 ICE-101 低煙霧冰 水機(附圖 1-1)。 (二) 將機器放置在ㄧ個平坦的平面上,並將油桶蓋子取下,倒入 Antari 高品質水性煙霧油,裝滿後蓋回油桶蓋(附圖 1-2)。 (三) 將冰塊放入冰槽中,冰槽最多可容納 8 公斤的冰塊;裝滿後將 機器蓋子輕輕蓋上,並用適當力道加以旋緊(附圖 1-3)。 (四) 將排水管牢牢接著於機氣排水口,並將排水管的另一端放置在 實驗區水槽,啟動後方控制盤面之自動排水按鈕,以順利排出 實驗中所產生之冰水(附圖 1-4)。 (五) 將 Z-8 控制器接至機械後方的對應接頭上,並確定連結(附圖 1-4)。 二、操作方法 (一) 將機器電源插在有接地的插座上(110V),再將機器後方的電 源開關打開至"ON"的位置。當 Z-8 控制器上的綠燈亮起(約 2-3 分鐘),表示機器已經加熱完畢,可以使用。 (二) 按下控制器上適當的按鈕,其可啟動噴煙功能。 (三) Z-8 為長度約 7.6 公尺的有線控制器,配有 4Pine XLR 接頭與ICE-101 連結(附圖 1-5)。 1.間隔時間旋鈕(Interval): 旋轉此旋鈕來設置定時模式下,每次 煙霧輸出間隔時間,範圍是 10-250 秒。 2.噴煙時間旋鈕(Duration): 旋轉此旋鈕來設置定時模式下,每次 煙霧輸出時間,範圍是 1-15 秒。 3.煙霧輸出旋鈕(Output): 旋轉此旋鈕來設置煙霧輸出量,範圍是 0-100%。 4.按下 Timer 黃色按鈕,可以啟動定時模式。 5.按下 Continues 紅色按鈕,則會啟動持續噴煙的功能,煙霧輸 出量由煙霧輸出旋鈕來控制。請注意,當電熱管的溫度過低, 機器會停止噴煙並開始重新加熱,當加熱程序完成後,機器才 會再次噴煙。 6.持續按住 Manual 綠色按鈕,會蓋過之前的設定,並啟動最大 量的煙霧輸出功能;放開 Manual 綠色按鈕後,機器會立即停 止噴煙。 三、維護注意事項 (ㄧ)無論採用哪一種安裝方式,請勿使機器傾斜超過 150。 (二)請隨時注意油桶內的油量,以確保在機器運轉時有足夠的煙霧
油;在沒有煙霧油的情況下運轉機器,可能會造成機器永久損壞。 (三)如果發生煙霧輸出量過少、幫浦產生噪音或無法正常噴煙,應立 即拔掉插頭,並依下列程序進行故障排除: 1.檢查是否有足夠的煙霧油、外部保險絲、控制器連結處或電源是 否鬆脫,如果以上皆無問題,請重新插上插頭。 2.如果按住控制器按鈕超過 30 分鐘,機器還是無法噴煙,應檢查連 接油桶的管子是否順暢,煙霧油是否流通。 3.若仍無法辨識原因,請立即關機冷卻,並將機器送請原廠檢修。 (四)在使用 40 個小時以後,可以使用蒸餾水,依下列步驟來清潔電熱 管: 1.在油桶中倒進蒸餾水,然後將連結油箱與機器的油管接上 2.將電源插頭接上,讓機器完成加熱程序。 3.在通風良好的地方讓機器運轉幾分鐘時間,即可完成清潔步驟。 4.重新添加煙霧油,啟動機器,確認能正常運作並製造煙霧。 (五)煙霧機有時後會在操作過程或機器關掉後,仍噴出少量煙霧。 (六)煙霧機在長時間運轉後會有個循環,機器會自動暫停一小段時間 重新加熱。在這段時間,機器不會產生任何煙霧,而控制器上的 綠色的 LED 指示燈也會自動變暗,當機器加熱完成,綠色 LED 燈會再次亮起。
附圖 1-1 Antari 低煙霧冰水機 資料來源:本研究
附圖 1-2 水性煙霧油桶 資料來源:本研究
附圖 1-3 冰塊水槽 資料來源:本研究
附圖 1-4 控制盤面 資料來源:本研究
附圖 1-5 Z-8 控制器 資料來源:本研究
附錄二 電子式壓力掃描器 PSI 操作流程
步 驟 說明 位置 1 依標準操作程序連接線路,將氣體壓力 數據擷取主機、乙太介面電源供應器、 64 頻道電子式壓力掃描模組及電腦分別 以訊號線連結完畢並確認連接電源,其 中氣體壓力數據擷取主機連至 64 頻道 電子式壓力掃描模組之訊號線需注意主 機端與儀器端是否正確接續。 2 確認外接氣體壓力源之輸出壓力為 80~ 125 psi 後,以管路連接至氣體壓力數據 擷取主機,若有氣體逸散異聲,則須檢 查管路或連接處是否有漏氣現象。 3 確認乙太介面電源供應器接於 110 伏特 之插座後,開啟氣體壓力數據擷取主機 電源,正常狀況下,主機正面 LINK 燈 號會亮黃光、STATUS 燈號紅綠交互閃 爍。待 STATUS 燈號轉為恆綠後,此時 儀器處於待機狀態,即可由電腦程式控 制進行資料擷取操作。擷取轉換數位訊號操作程序 本章節主要說明電子式壓力掃描器 PSI 資料擷取系統系統使用電 腦連乙太介面電源供應器,擷取並儲存轉換後之數位訊號操作程序 1. PSI 電腦操作軟體 (1) 開啟 PSI 資料擷取程式,正常連結後初始畫面如下。 (2) 點選 Configure 進入擷取設定介面,於上半部設定存檔路 徑(Data path)、名稱(Data file name)及選擇壓力量測單位 (Unit of measure)。然後設定資料擷取頻率(Data rate)及擷 取時長(Data time),程式會自動計算該案例的資料擷取總點
位數(Data points),無需自行輸入。又此套系統具溫度補正功
能,如需另外記錄溫度可勾選 Record Temp。完成後點選離開 並存檔(Exit with Save)。
(3) 點選欲使用之擷取模式進行套用,套用完成後畫面如下。
(4) 每次擷取資料前需進行儀器歸零,歸零方式為點選 RE-ZERO,點選後會明顯聽到儀器做動聲音,左側點選區字 體變為灰色且無法點選。
當歸零完成後左側點選區字體會變回黑色可選取狀態,且訊息 區會顯示 Function Complete -- Ready。
(5) 檢查模組量測狀況,點選 DISPLAY-DATA 於螢幕即時觀 測各點位壓力量測值,正常歸零後壓力應在±3 Pa 內,如超過 此值該點位於實驗中應排除不使用。本案例中僅連接 1 電子式 壓力掃描模組,故 Select a Scanner 僅有#1 可選擇,而隨著連 接模組數的增加,#2~#8 也隨之可點選查看不同模組之量測 資料。經確認全部接續模組壓力量測皆正常後方可進行正式實 驗。
(6) 確認模組量測狀況無誤後即可進行資料量測,量測方式為 點選 Take Data Point,點選後出現如下視窗。
擷取完成後會自動寫入資料,且訊息區會顯示資料寫入進度。
2 電子式壓力掃描器 PSI 資料擷取系統系統關閉操作說明
(1) 關閉電子式壓力掃描器 PSI 資料擷取系統控制程式。 (2) 關閉氣體壓力數據擷取主機電源。
3 使用注意事項 (1) 氣體壓力數據擷取主機連至 64 頻道電子式壓力掃描模組 之訊號線需注意主機端與儀器端是否正確接續。 (2) 無法正確歸零時,確認外接氣體壓力源之輸出壓力為 80 ~125 psi。如有氣體逸散異聲,須檢查管路或連接處是否有漏 氣現象。 (3) 正常狀況下,開機後主機正面 LINK 燈號會亮黃光、 STATUS 燈號紅綠交互閃爍;待 STATUS 燈號轉為恆綠後即為 待機可量測狀態。 (4) 正常歸零後所測得之壓力應在±3 Pa 內。
附錄三 三維動態式皮托管量測操作流程
一、三維動態式皮托管實驗設備明細表 名稱 三維動態式皮托管 三維動態式皮托管數位主機 照片 名稱 NI 資料擷取盒 三維移動機構 照片 設備 規格 1. NICompacDAQ-9172 (analog–digital)。本系統最高 可連結 4 個模組。 2. 時間解析度(Timing resolution)為 50ns。 3. 取樣頻率(Sampling rate)最 高可達 3.2MHz。配合四個 NI 9215 模組,每個模組共 有四個訊號輸入端,並具有 同步取樣功能(sample and hold),可同步取樣±10V 的 四個輸入通道,電壓輸出解 析度可達 0.3mV。 4. 取樣頻率為 100kHz。 5. 解析度:16-bit 6. USB 傳輸至電腦存取資料。 採用三組馬達與皮帶式滑軌 分別調整 X、Y、Z 三個方向 各別的位移,以進行所需位置 之量測。本移動機構三個方向 的最小位移距離皆為 1mm。二、三維動態式皮托管操作程序 步 驟 說明 位置 1 將鋼製套筒固定於三維移動機構 上。 2 將專用之訊號傳輸線及參考壓力 管線穿過套筒。 3 將 2 條管線分別接續至三維動態式 皮托管上,其中專用之訊號傳輸線 安裝時需分別將訊號傳輸線上及 皮托管之紅點對準後方能插入,另 一側亦同。 4 線材接續將三維動態式皮托管安 入套筒,並確認皮托管勾起處正對 來流方向後固定。
5 將專用之訊號傳輸線另一端拉入 儀控室內,依右圖方式接上三維動 態式皮托管數位主機及 NI 資料擷 取盒,並將 NI 資料擷取盒接至電 腦後即可開啟電源及程式進行操 作。其中三維動態式皮托管數位主 機之 BNC 線需按上方標記之順序 接續至 NI 資料擷取盒。 三、 三維動態式皮托管風速擷取操作程序 3-1 TFI 電腦操作軟體 開啟 TFI 資料擷取程式,正常連結後初始畫面如下,並依下方步 驟進行操作。 Step 1:輸入實驗當時之溫度及氣壓。 Step 2:輸入需要之量測時長及擷取頻率。
Step 4:設定存檔位置及檔案名稱。 Step 5:於 0 風速時進行皮托管歸零。
Step 6:量測方式分為(a)螢幕上常時顯示及(b)按 Step 2 設定 之量測時長及擷取頻率進行後依 Step 4 設定輸出。 3-2 三維移動機構操作說明 (1) 開啟三維移動機構控制程式,檔案位置如下。 (2) 執行程式後介面如下,操作時將各方向所需之位移分別輸 入於左側綠色標示格內,各方向之正負定義如下方所示。 3-3 使用注意事項 (1) 三維動態式皮托管需確實接上參考壓力管線,訊號傳輸線 安裝時也需將紅點對準後方能插入。 (2) 三維動態式皮托管安裝時前端勾起處需正對來風方向。 (3) 三維動態式皮托管數位主機與 NI 資料擷取盒接續時需確實 按照編號由小至大連接。
(5) 三維移動機構每次移動不可超過 300 mm,同時移動前需確 切注意滑軌剩餘可位移長度,避免過捲造成皮帶撕裂。
附錄四 期中審查意見答復表
審查意見 辦理情形 DRIP 之風向率定建議未來可選 用一標準風場進行比對校正。 後續將先以 Irwin 於 1981 年提出 之 3 種建築簡易配置來探討風場 效應的影響。 報告書第 3 頁,風「俗」應是風 「速」;第 5 頁之圖 1-7 應是圖 1-4,建請修正 已於期末報告中修正 風環境研究除考慮風速外,若將 盛行風向及日夜溫差局部環境 風向亦納入考量,則更能適切的 反應真實風環境狀況 感謝委員意見 歐文探針中α及β參數,因直接 影響風速推估,使用上應更為嚴 謹。目前實驗中迴歸方程式的 R2值偏高太多,真實性存疑 風速校正結果係應用歐文(Irwin) 於 1981 年提出之壓差與風速校正 迴歸曲線,結果呈現良好相關是可 預期的。 DRIP 實驗中是否不要採用均勻 流,改以其他流場試驗,應會有 不同結果,建議納入期末研究參 考 於期末報告第三章中,已納入簡易 建築配置風場之地表風速及風向 實驗規劃與量測結果。 低風速風向不定,如何率定請再 探討 於第四章結論中已將 DIRP 之適用 範圍加以陳述,當其所在位置之紊 流強度在 8%以上且風速為 3m/s 以上時,其風向率定結果,可符合 誤差±150 之要求。換言之,低於 3m/s 之風向量測結果,恐不符誤 差±150之要求。 建 議 增 列 表 次 成 果 及 圖 文 說 明,如低溫煙霧與紅外線熱像之 可視化及風向測定等 已納於期末報告中 報告書第 31 頁,建議補述本計 畫之限制、裝置設備開發之尺 寸,並略述本研究價值 已於結論中加以說明 報告書附錄二操作說明,建議可 加入案例分析 該附錄僅說明操作流程,且配有圖 例,以更明確交待安裝細節。分析方法進行比對 供比對。 本案研究成果是否可用於建築 物中庭區域之結構耐風設計,例 如 座 落 在 中 庭 的 臨 時 性 構 造 物,其耐風能力與風向之判斷 研究主軸係以來流主風向判定為 目標,對於結構耐風設計則尚無法 一併判斷。 建議將前人研究(參考文獻 10) 之方向性探針,以及本研究所採 用之理論方法,建立完整之物理 與數學模式比對 感謝委員意見 DRIP 之風向率定方法及風速須 有再現性,建議進行重複性試 驗,以率定出數學模式後分析其 可靠度 研究中風向量測皆重複進行三次 來求取平均值。 研究所提之溫度可視化,溫度描 述所指高度位置為何? 本 研 究 主 要 以 溫 度 差 異 顯 現 為 主,快風速區之則溫度較低,慢風 速區則溫度較高,以溫度為介質來 表現風場流動。 試驗建議可加入三維動態皮托 管(Cobra Probe)量測,以比對速 度與風向結果 已納入第三章中 請分析並比較各式風速(向)計與 改良式歐文探針之成本效益 於行人風場案中由於地況複雜及 檢測點位多,目前僅歐文探針可符 合該功能於風洞實驗中量測地表 風速與風向。 請具體研析此類風速計在風環 境行人風場評估之具體價值 DIRP 可用以進行風速量測與風向 率定,除突破既有技術層面外更具 實用價值。 率定方法理論及說明不足,何以 分 析 時 假 設 風 向 機 率 是 橢 圓 型,請說明之 已簡化說明於報告第二章第 17 頁 中。
附錄五 期末審查意見答復表
審查意見 辦理情形 報告中定向風速計(DIRP)和動 態皮托管(Cobra probe)結果之 比較中,建議將「誤差」改成「差 異」 期末報告表 3-1、3-4、3-5、3-6 與 3-7 中原誤差(%),已於成果報 告中改為差異(m/s)。 本研究目前獲致之成果已能掌 握現有定向風速計(DIRP)之精 確程度,未來仍可考慮繼續在其 應用能力上之探討 感謝委員意見 本案開發之定向風速計(DIRP) 在風洞實驗中有很大的應用潛 力,成品測試成果良好,值得肯 定,未來可考慮朝向專利申請發 展 感謝委員意見 報告書第 14 頁最後一行「中心 點運行軌跡為橢圓形」應加以進 一步說明 係誤植,已修改為「其雷達圖形心 位置」 報告書第 15 頁式 2-1 請補充符 號說明 已於報告書第 15 頁加以說明 實驗量測結果 Case 1~3 之數字 與圖表對照請再檢核修正(例 如: 第 35 頁) 已詳查修正於報告中 35~36 頁。 實驗結果風向率定角度誤差多 少為可接受合理範圍,請補充說 明 已於結論第五點加以說明 報告書第 45 頁,結論第四、五 點之文字敘述可整合 感謝委員意見 本案報告書未詳述實測執行步 驟及時間。個人認為日夜要分別 量測比對,檢視歐文探針在不同 環境下之風洞實驗是否可反應 真實的風場特性,方能有助於建 築物設計及防風結構設施配置 能導入定向地表風速計(DIRP) 評估行人風場 本研究係於風洞內進行,屬常溫常 壓,非應用於戶外實際風場量測, 日夜或季節皆非本研究控制變因。風 速 情 況 下 風 向 不 確 定 性 較 高,而一般所指低風速皆稍低於 3m/s,而文中第 18 頁低風速 (10~3m/s)是否有誤,請查證 戶外實際風場風速與風洞風速存 在著縮尺效應,亦即風洞風速需經 放大方為實場風速,故原說明無 誤。 季節性影響文中並無論述如何 進行 本研究係於風洞內進行,屬常溫常 壓,非應用於戶外實際風場量測, 日夜或季節皆非本研究控制變因。 本 案 設 計 之 定 向 地 表 風 速 計 (DIRP)之製作成本遠低於動態 皮托管(Cobra probe),但精準 度在可接受之範圍,值得繼續發 展開發研究,將會是重要貢獻 感謝委員意見 請驗證分析本案開發之定向地 表風速計(DIRP),在行人風場 可量測的風向、風速及其應用的 溫度範圍 本研究係於風洞內進行,屬常溫常 壓,溫度影響非本研究控制變因。
參考書目
[1] D. Zacho, P. Michalek. (2012) “Experimwental investigation of pedestrian level winds using multiple measuring methods”. 18thInternational Conference Engineering mechanics, pp. 1573–1579
[2] Yamada, M., Uematsu, Y., and Sasaki, R. (1996), “A visual technique for the evaluation of the pedestrian-level wind environment around buildings by using infrared thermography”, Journal of Wind Engineering and Industrial Aerodynamics, Vol.65, pp.261-271.
[3] BRE Digest 141(May1972).” Wind Engineering Around Tall Buildings”.
[4] H.P.A.H Irwin, (1981) “A simple omnidirectional sensor for wind-tunnel studies of pedestrian-level winds”. Journal of Wind Engineering and Industrial Aerodynamics, Vol. 7, pp. 219-239. [5] Milan Jirsák, David Zacho, Petr Michálek, Kateřina Jandová
(2008). Irwin Probe Calibration and its use at investigation of Pedestrian Wind Conditions in Vicinity of High Buildings, Conference: Colloquium Fluid Dynamics 2008.
[6] TFI Cobra Probe Turbulent Flow Instrumentation, http://www. turbulentflow.com.au/Products/CobraProbe/CobraProbe.php.
[7] Mohan (2011). “Study of Pedestrian Level Wind Environment in the Vicinity of Tall Buildings”, Ph.D. Thesis, Centre of Excellence in Disaster Mitigation and Management, Indian Institute of Technology, Roorkee, India.
[8] Wu, H and Stathopoulos, T (1993), “Infrared- Thermography Technique for Pedestrian Wind Evaluation”, Proceedings: Third Asia Pacific Symposium on Wind Engineering, Dec13-15, 1993,
[9] K.Mohan (2015) “ Review of methods and techniques for the assessment of winds at pedestrian level”, International Journal of Research in Engineering and Technology, Vol. (4), pp42-46.
[10]Emanuela Palombi, Nick Cook (2010).Development and Application of a Directional Irwin Sensor, 9th UK Conference on Wind Engineering (WES-2010).

![圖 2-1 IRP 幾何尺寸 資料來源:參考書目[4] PV 式 2-1 α、β分別為線性回歸所得參數](https://thumb-ap.123doks.com/thumbv2/9libinfo/8764949.209300/31.892.150.720.105.1123/IRP幾何尺寸資料來源參考書目PVα分別為線性回歸所.webp)