MOTC-STAO-103-02
區域交通控制中心雲端化計畫
(3/4)
執行單位:國立交通大學
委託機關:交 通 部
中華民國 104 年 12 月
區域交通控制中心雲端化計畫
(3/4)
MOTC-STAO-103-02
執行單位:國立交通大學
委託機關:交 通 部
中華民國 104 年 12 月
著者:黃銘崇、邱裕鈞、羅彬榮、林啟豊、董聖龍、
周幼珍、林貴璽、劉子正、鄭滄濱、陳韋龍、
鄒政修、方可欣、黃友恆、徐嘉駿、李怡穎
區域交通控制中心雲端化計畫. (3/4) / 黃銘崇 、邱裕鈞等. --初版. –臺北市 : 交通部, 民 104.12 面; 公分 ISBN 978-986-04-7692-7(平裝) 1.交通管理 2.管理資訊系統 557 104028691 區域交通控制中心雲端化計畫(3/4) 著 者:黃銘崇、邱裕鈞等 出版機關:交通部 地 址:10052 臺北市中正區仁愛路一段 50 號 網 址:http://www.motc.gov.tw/ch/home.jsp?id=714&parentpath=0,2,711 電 話:(02)23492900 出版年月:中華民國 104 年 12 月 印 刷 者:竹風數位印刷輸出中心 版(刷)次冊數:初版一刷 100 冊 定 價: 542 元 本書同時登載於交通部網站 展售處:五南文化廣場 40042 台中市中山路 6 號 電話:(04)2226-0330 國家書店松江門市 10485 台北市松江路 209 號 1 樓 電話:(02) 2518-0807 國家網路書店: http://www.govbooks.com.tw GPN:1010403411 (平裝) ISBN:978-986-04-7692-7 國家圖書館出版品預行編目資料
交通部科技顧問室委託研究計畫出版品摘要表
出版品名稱:區域交通控制中心雲端化計畫(3/4)
國際標準書號(或叢刊書) 政府出版品統一編號
計畫編號
978-986-04-7692-7 1010403411 MOTC-STAO-103-02 主管:施仁忠 聯絡電話:02-23492800 傳真號碼:02-23122476 e-mail:[email protected] 承辦人:陳慧琪、鄭永忠 聯絡電話:02-23492876 傳真號碼:02-23122476 e-mail:[email protected]、 [email protected] 研究單位:國立交通大學 計畫主持人:黃銘崇、邱裕鈞 聯絡電話:02-23494940 傳真號碼:03-5720844 e-mail:[email protected] 研究人員:黃銘崇、邱裕鈞、羅彬榮、 林啟豊、董聖龍、周幼珍、林貴璽、 劉子正、鄭滄濱、陳韋龍、鄒政修、 方可欣、黃友恆、徐嘉駿、李怡穎 通信地址:300 新竹市大學路 1001 號綜合一館 8 樓 聯絡電話:03-5712121#31489 其他參與合作 之研究團隊 中華電信、台灣 世曦研究期間
104.01.05 104.10.01研究經費
NT$12,181,000 關鍵詞:區域交通控制;雲端運算;號誌設計 摘要: 本計畫係應用「雲端運算」技術於區域交通控制問題,以其自動化調派 IT 資源、快速部署與優異的延展性與可用性等優勢,建構整合式區域交通控制雲端 系統示範平臺,達成無縫、即時地整合交通控制資料,進而同步解決「跨單位間 之區域交通控制協同管理」與「現有中、小型都市交通控制中心軟硬體建置與後 續管理維運」等問題。本計畫之主要目的為針對前兩期所提出之雲端交通協控系 統規劃架構進行調整,以 C-c-R 架構進行協控機制軟體開發與功能擴充,期望能 將本計畫成果應用於智慧型運輸系統中先進交通管理系統之參考。本計畫的重要 成果與效益包含:「建立一以 C-c-R 為架構之交通控制雲端平台」、「降低地區交 通控制系統建置與維運成本」、「提升區域交通控制協同合作管理品質」與「強化 雲端運算與交通控制核心技術研發能量與人才培育」。 出版日期 頁數 定價 本 出 版 品 取 得 方 式 104.12 542 542 元 凡屬機密性出版品均不對外公開,普通性出版品;公營、公 益機關團體及學校,由本部依業務性質函送參考,其他需要 者可函洽本部免費贈閱,或逕進入 www.motc.gov.tw 之科技 研究項下下載。 機密等級: 限閱密機密極機密絕對機密 (解密【限】條件: 年 月 日解密,公布後解密,附件抽存後解密, 工作完成或會議終了時解密,另行檢討後辦理解密)普通
備註:本研究之結論與建議不代表交通部之意見
SCIENCE & TECHNOLOGY ADVISORS OFFICE
MINISTRY OF TRANSPORTATION AND COMMUNICATIONS
TITLE:The Research and Development Project of Area Traffic Control based on
Cloud Computing Structure(3/4)
ISBN(OR ISSN) GOVERNMENT
PUBLICATIONS NUMBER PROJECT NUMBER
978-986-04-7692-7 1010403411 MOTC-STAO-103-02 DIRECTOR GENERAL: Zen-Chung Shih PHONE:02-23492800 FAX:02-23122476 E-MAIL:[email protected] SPONSOR STAFF:
Hui-Chi Chen, Yong-Jhong Cheng PHONE:02-2349287
FAX:02-23122476
E-MAIL:[email protected]; [email protected]
RESEARCH AGENCY:NATIONAL CHIAO TUNG UNIVERSITY
PRINCIPAL INVESTIGATOR: Ming-Chorng Hwang, Yu-Chiun Chiou
PHONE:02-23494940 FAX:03-5720844
E-MAIL:[email protected]
PROJECT STAFF:M. C. Hwang, Y. C. Chiou, B. R. Lo, C. L. Lin, S. L. Tung, Y. J. Jou, G. S. Lin, T. C Liu, T. B. Jeng, W. L. Chen, C. H. Tsou, K. H. Fang, Y. H. Huang, C. C. Hsu, Y. Y. Li
ADDRESS:Rm. A803, Assembly Building 1, No.1001, Daxue Rd., East Dist., Hsinchu City 30010, Taiwan(R.O.C.)
PHONE:03-5712121#31489 PROJECT
PERIOD
2015/01/05~2015/10/01
PROJECT
BUDGET
NT$
12,181,000
KEY WORDS:Area traffic control;Cloud computing;Signal timing design ABSTRACT:
In this project, cloud computing technology is utilized to deal with a regional traffic control problem. The advantages of cloud computing technology include the flexibility to quickly meet the demand and the ability of fast deployment and efficient allocation of computing resources. The development of the cloud platform for a regional traffic control system can mitigate the issues about the coordinated traffic management between different authorities and the implementation and maintenance of local traffic control centers. In this phase, the C-c-R framework is introduced and the development and extension of the application services on the proposed cloud platform are following this framework. The cloud platform and the framework proposed in this phase are expected to be a reference model for the advanced traffic management system. Some important outcomes and benefits of this project include: establishing a cloud-based area traffic control system based on the C-c-R framework; reducing the implementation and maintenance cost of the local traffic control system; enhancing the collaboration of different traffic control authorities; strengthening the technologies and human resources in cloud computing and traffic control.
DATE OF PUBLICATION NUMBER OF PAGES PRICE CLASSIFICATION
SECRET
CONFIDENTIAL
UNCLASSIFIED
2015/12
542
NT$542
目錄
第一章 計畫簡介 ... 1 1.1 計畫背景與目的... 1 1.2 計畫範圍與特色... 2 1.3 前期結論事項... 2 1.3.1 雲端化區域交通控制資訊系統建立 ... 2 1.3.2 國道 1 號新竹交流道光復路南向出口、新竹科學園區新安路南 向出口與幹道協控系統建立 ... 3 1.3.3 一、二期區域交控協調運作機制實作遭遇之困難 ... 3 1.4 計畫流程... 6 第二章 區域交通協控雲端化軟體架構規劃 ... 8 2.1 建立交通控制雲端化系統採 C-c-R 協控機制之軟體架構 ... 8 2.2 發揮雲端系統功能並建立可重複應用之機制... 10 2.3 雲平台軟體內容調整擴充... 12 2.3.1 協控路網動態畫面軟體新增功能 ... 12 2.3.2 已開發之雲平台軟體調整 ... 13 2.3.3 必要之 API 定義與建立 ... 17 2.3.4 號誌協控功能開發 ... 18 2.3.5 協控通訊協定檢討 ... 19 2.3.6 新增歷史查詢及分析功能 ... 19 2.3.7 都市動態資料通訊軟體擴充 ... 20 第三章 區域交通協控雲端化軟體設計 ... 22 3.1 軟體架構... 22 3.1.1 整體軟體架構 ... 22 3.1.2 重要軟體設計名詞定義 ... 253.1.3 相關關軟體列表說明 ... 27 3.1.4 各軟體基本架構說明 ... 28 3.2 協控通訊軟體... 29 3.3 設備啟動判斷軟體... 34 3.4 協控模式軟體(查表案例) ... 43 3.5 即時資料處理軟體... 49 3.6 旅行時間推估軟體... 55 3.7 協控路網動態畫面顯示軟體... 62 3.8 列表建立範例... 69 第四章 區域交通協控雲端化軟體開發 ... 81 4.1 資料庫設計... 82 4.2 以縣市或區域路網為專案建立之基礎... 83 4.3 已開發之交通控制雲端化系統平台軟體調整... 87 4.3.1 擴充與交控中心之資料接收模組 ... 87 4.3.2 交通資訊處理(如插補、平滑等) ... 88 4.3.3 車輛辨識原始資訊處理(如跨單位之路徑旅行時間運算) ... 89 4.4 協控路網動態畫面軟體新增功能... 90 4.4.1 展示協控範圍內之設備運作狀態 ... 90 4.4.2 路網圖協控設備資料顯示 ... 90 4.4.3 整合 Google 路況圖層 ... 97 4.4.4 顯示運作中之協控模式策略 ... 98 4.4.5 顯示平均旅行時間 ... 99 4.5 設備啟動判斷軟體功能擴充... 100 4.5.1 依模式需求建立多重判斷式功能 ... 100 4.5.2 啟動判斷之條件來源介接 ... 101
4.6 SaaS 層軟體... 103 4.6.1 協控模式之管理 ... 104 4.6.2 變更預設參數值功能 ... 106 4.6.3 旅行時間推算軟體管理設定查詢功能 ... 106 4.6.4 歷史查詢及趨勢圖分析功能 ... 107 4.7 必要之 API 定義與建立 ... 110 4.7.1 設備啟動判斷軟體與協控模式間 API ... 112 4.7.2 協控模式查表之參數 API ... 116 4.7.3 即時資料擷取 API ... 118 4.7.4 歷史資料擷取 API ... 123 4.7.5 API 之使用軟體環境與程式範例(Java 版) ... 128 第五章 跨機構交通資訊交換發布格式 ... 132 第六章 都市交控標準化軟體協控功能擴充可行性評估 ... 133 6.1 軟體功能需求分析... 133 6.2 標準化軟體架構概述... 135 6.3 可行性分析與建議... 140 第七章 與交通部補助縣市交控系統協控功能整合 ... 142 7.1 協控功能模擬測試計畫... 142 7.2 協控功能模擬測試結果... 144 7.2.1 協控模擬測試-正常狀況 ... 145 7.2.2 協控模擬測試-異常狀況 ... 154 第八章 區域交控雲標準作業流程 ... 164 8.1 整體流程說明... 164 8.1.1 協控組織 ... 165 8.1.2 協控運作流程 ... 165
8.3 交通問題研析與策略研擬... 169 8.3.1 問題分析 ... 169 8.3.2 協控範圍界定 ... 172 8.3.3 KPI 之擬定 ... 176 8.3.4 協控策略研擬 ... 179 8.3.5 終端設施檢核及增補 ... 180 8.4 協控計畫擬定... 182 8.4.1 交控雲平台之協控策略軟體配置與運作架構概述 ... 182 8.4.2 協控計畫啟動、結束條件之訂定(設備啟動判斷軟體) ... 183 8.4.3 協控模式之建立 ... 186 8.4.4 協控模式軟體開發與測試 ... 188 8.5 以新竹區域協控案例... 198 8.5.1 新竹示範區域之問題 ... 198 8.5.2 控制系統關鍵路徑及範圍界定 ... 198 8.5.3 控制策略 ... 199 8.5.4 協控計畫填表 ... 201 8.5.5 操作程序實例 ... 228 8.6 系統建置... 235 8.6.1 雲端建構作業 ... 235 8.6.2 區交控系統軟體開發 ... 236 8.6.3 路側設施建置 ... 238 8.7 整合測試... 238 8.7.1 自主測試 ... 238 8.7.2 整合測試 ... 240 8.7.3 試運轉 ... 241
9.1 教育訓練... 243 9.2 成果觀摩會... 246 第十章 結論與建議 ... 250 10.1 本期計畫期末成果摘要... 250 10.2 結論與建議... 254 附錄一 交控雲資料庫表格設計文件 附錄二 跨機構交通資訊交換發佈標準格式草案 附錄三 期中報告審查意見回覆表 附錄四 期中報告修訂版書面審查意見回覆表 附錄五 軟體分析設計規格書 附錄六 系統網站使用手冊 附錄七 成果觀摩會問答紀錄 附錄八 期末報告審查會議意見回覆表 附錄九 縣市交控軟體擴充需求書 附錄十 雲端化區域交通控制資訊系統網站資安弱點掃描檢測稽核報告 附錄十一 軟體驗測會議意見回覆表
圖目錄
圖 1.3-1 C-R 區域協控整體系統架構示意圖 ... 4 圖 1.3-2 整體協控系統運作架構圖 ... 6 圖 1.4-1 計畫工作流程圖 ... 7 圖 2.1-1 交通控制雲端化系統 C-c-R 區域協控軟體架構示意圖 ... 8 圖 2.2-1 協控策略軟體執行配置示意圖 ... 11 圖 2.3-1 交通資訊處理流程圖 ... 14 圖 3.1-1 區域交控雲軟體架構擴充變更示意圖 ... 22 圖 3.2-1 協控通訊軟體架構示意圖 ... 30 圖 3.3-1 設備啟動判斷軟體架構示意圖 ... 34 圖 3.4-1 協控模式軟體架構圖 ... 43 圖 3.5-1 即時資料處理軟體流程圖 ... 49 圖 3.6-1 旅行時間推估軟體架構圖 ... 56 圖 3.6-2 路徑旅行時間演算示意圖 ... 58 圖 3.7-1 旅行時間推估軟體架構圖 ... 62 圖 4.1-1 資料庫與各功能模組間架構示意圖 ... 83 圖 4.2-1 系統首頁登入畫面 ... 84 圖 4.2-2 新增協控專案建立之參考畫面一 ... 84 圖 4.2-3 新增協控專案建立之參考畫面二 ... 85 圖 4.2-4 新增自訂路網建立與設定之參考畫面一 ... 86 圖 4.2-5 新增自訂路網建立與設定之參考畫面二 ... 86 圖 4.2-6 自訂路網與協控專案的隸屬關係建立與設定之參考畫面 ... 87 圖 4.3-1 路側設施即時交通資訊發布 XML 檔案介接處理流程圖 ... 88 圖 4.3-2 設定 VD 動態資料異常檢核時之相關參數值作業圖 ... 88圖 4.4-1 協控路網動態畫面之協控範圍內設備運作狀態展示 ... 90 圖 4.4-2 協控路網動態畫面之協控範圍內設備運作內容顯示 ... 91 圖 4.4-3 協控區域 CCTV 影像訊號 ... 91 圖 4.4-4 協控區域 CMS 運作狀態及顯示內容 ... 92 圖 4.4-5 協控區域 VD 即時資料查詢 ... 93 圖 4.4-6 協控區域 VD 即時資料趨勢圖 ... 93 圖 4.4-7 協控區域所對應之路段及路徑旅行時間查詢 ... 94 圖 4.4-8 協控區域 AVI/eTag 配對旅行時間即時資料查詢 ... 95 圖 4.4-9 協控區域 VD 速度歷史資料趨勢圖 ... 95 圖 4.4-10 協控區域 VD 流量歷史資料趨勢圖 ... 96 圖 4.4-11 協控區域 VD 佔有率歷史資料趨勢圖 ... 96 圖 4.4-12 協控區域中協控專案歷史紀錄查詢 ... 97 圖 4.4-13 協控路網動態畫面之 Google 路段績效(順暢、車多、壅塞等)圖層整合 ... 98 圖 4.4-14 協控路網動態畫面之運作中之協控模式策略顯示 ... 99 圖 4.4-15 協控路網動態畫面之路徑平均旅行時間顯示 ... 99 圖 4.5-1 設備啟動判斷軟體功能擴充之架構圖 ... 102 圖 4.5-2 設備啟動判斷軟體功能擴充之設備啟動判斷流程圖 ... 103 圖 4.6-1 協控模式之管理之操作畫面一 ... 104 圖 4.6-2 協控模式之管理之操作畫面二 ... 105 圖 4.6-3 路段路徑參數設定之操作畫面 ... 106 圖 4.6-4 路段路徑參數設定之操作畫面 ... 107 圖 4.6-5 交通資料報表之查詢操作畫面 ... 107 圖 4.6-6 交通資料趨勢圖(單一車輛偵測器多個時段)之查詢操作畫面 ... 108 圖 4.6-7 交通資料車流基本圖之查詢操作畫面 ... 108 圖 4.6-8 路徑旅行時間報表之查詢操作畫面 ... 109
圖 4.6-9 路徑旅行時間資料趨勢圖(單一或多個路徑)之查詢操作畫面 ... 109 圖 4.6-10 路徑旅行時間資料趨勢比較圖(單一路徑之兩個以上之不同時段)之查 詢操作畫面 ... 110 圖 4.7-1 使用瀏覽器開啟呼叫 API 頁面 ... 128 圖 6.1-1 都市交控標準化軟體與交控雲整合架構 ... 134 圖 6.2-1 標準化軟體擴充架構 ... 136 圖 6.2-2 擴充通訊協定 3.1 版後之通訊架構示意圖 ... 138 圖 6.2-2 資訊可變標誌軟體擴充架構 ... 139 圖 6.3-1 都市交控標準化軟體擴充協控功能架構 ... 140 圖 7.1-1 模擬交控系統虛擬主機 ... 142 圖 7.2-1 協控單位服務網址設定說明 ... 145 圖 7.2-2 協控模擬測試之策略設定內容 ... 146 圖 7.2-3 協控模擬測試之協控模式設定內容 ... 146 圖 7.2-4 協控模擬正常狀況測試情境說明 ... 147 圖 7.2-5 協控模擬正常狀況測試手動啟動/停止協控策略說明 ... 148 圖 7.2-6 協控模擬正常狀況測試-策略進入開始判斷狀態 ... 149 圖 7.2-7 協控模擬正常狀況測試-竹北疏流策略啟動 ... 150 圖 7.2-8 協控模擬正常狀況測試-第一級截流策略啟動 ... 151 圖 7.2-9 協控模擬正常狀況測試-竹科分流策略啟動 ... 151 圖 7.2-10 協控模擬正常狀況測試-分流策略停止 ... 152 圖 7.2-11 協控模擬正常狀況測試-截流策略停止 ... 153 圖 7.2-12 協控模擬正常狀況測試-疏流策略停止 ... 153 圖 7.2-13 協控模擬異常狀況測試-協控策略設定說明 ... 154 圖 7.2-14 協控模擬異常狀況測試-協控模式設定說明 ... 154 圖 7.2-15 協控模擬異常狀況一測試情境說明 ... 155 圖 7.2-16 協控模擬「異常狀況一」測試成果說明 ... 156
圖 7.2-17 協控模擬異常狀況二測試情境說明 ... 157 圖 7.2-18 協控模擬「異常狀況二」回覆同意協控 ... 158 圖 7.2-19 協控模擬「異常狀況二」不回覆同意變更請求 ... 159 圖 7.2-20 協控模擬「異常狀況二」雲中心終止協控 ... 159 圖 7.2-21 協控模擬異常狀況三測試情境說明 ... 161 圖 7.2-22 協控模擬「異常狀況三」回覆同意協控 ... 162 圖 7.2-23 協控模擬「異常狀況三」回覆同意變更請求 ... 162 圖 7.2-24 協控模擬「異常狀況三」強制中止協控 ... 163 圖 8.1-1 區域交控雲標準作業流程圖 ... 164 圖 8.3-1 各地區尖峰交通路徑示意圖 ... 172 圖 8.3-2 竹北地區各主要車流路徑及行經號誌路口 ... 173 圖 8.3-3 新竹科學園區地區各主要車流路徑及行經號誌路口 ... 174 圖 8.3-4 系統控制範圍示意圖 ... 175 圖 8.3-5 路口通過量調查範圍路網各出口示意圖 ... 177 圖 8.3-6 關鍵路徑旅行時間觀測範圍示意圖 ... 178 圖 8.4-1 協控策略軟體執行配置示意圖 ... 183 圖 8.5-1 區域性壅塞情境下各階段控制策略與啟動時機示意圖 ... 200 圖 8.5-2 新竹交流道新安路至竹北交流道光明六路」路段示意圖 ... 226 圖 8.5-3 路徑旅行時間建構─以新竹新安路至竹北光明六路為例 ... 227 圖 8.5-4 建立協控專案 ... 228 圖 8.5-5 建立路網 ... 229 圖 8.5-6 協控專案與設備綁定 ... 229 圖 8.5-7 設備啟動參數設定 ... 230 圖 8.5-8 設備啟動條件設定 ... 230 圖 8.5-9 設備啟動條件執行時間設定 ... 231
圖 8.5-11 查詢協控執行狀態 ... 232 圖 8.5-12 車輛配對篩選參數設定 ... 233 圖 8.5-13 路段路徑參數設定 ... 233 圖 8.5-14 旅行路徑查詢 ... 234 圖 8.5-15 旅行路徑詳細資訊查詢 ... 234 圖 8.6-1 協控系統運作架構 ... 235 圖 8.6-2 都市交控標準化軟體與交控雲整合架構 ... 237
表目錄
表 2.3-1 已開發之交通控制雲端化平台軟體需擴充調整說明 ... 16 表 3.1-1 本期軟體功能調整、擴充或新增說明 ... 23 表 3.1-2 重要軟體設計名詞定義 ... 25 表 3.1-3 重要軟體設計名詞定義 ... 27 表 3.3-1 策略運作狀態列表 ... 36 表 3.3-2 即時協控設備運作狀態列表 (每分鐘更新) ... 36 表 3.3-3 策略啟動時間範圍列表 ... 39 表 3.3-4 策略啟動判斷邏輯列表 ... 39 表 3.3-5 策略啟動判斷邏輯列表 ... 40 表 3.3-6 策略啟動判斷邏輯列表 ... 40 表 3.4-1 協控策略參數列表 ... 47 表 3.5-1 資料異常型態分類表 ... 51 表 3.6-1 路徑旅行時間建構表 ... 60 表 3.8-1 交控雲計畫 4-1 期策略執行內容 ... 70 表 3.8-2 策略啟動時間範圍列表 ... 73 表 3.8-3 策略啟動判斷邏輯列表 ... 73 表 3.8-4 竹北下匝道紓流協控策略參數列表 ... 74 表 3.8-5 竹北上匝道第 3 級截流之策略啟動時間範圍列表 ... 74 表 3.8-6 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 75 表 3.8-7 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 75 表 3.8-8 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 76 表 3.8-9 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 76 表 3.8-10 竹北上匝道第 3 級截流協控策略參數列表 ... 77 表 3.8-11 竹北上匝道分流之策略啟動時間範圍列表 ... 79表 3.8-12 竹北上匝道分流之策略啟動判斷邏輯列表 ... 79 表 3.8-13 竹北上匝道分流協控策略參數列表 ... 80 表 4.7-1 前期與本期已完成之 API 說明 ... 111 表 4.7-2 依協控專案與路網代碼查詢該路網上之設備 API 說明 ... 112 表 4.7-3 查詢協控策略 API 說明 ... 113 表 4.7-4 新增、修改、刪除協控策略 API 說明 ... 114 表 4.7-5 新增、修改、刪除協控策略執行時段 API 說明 ... 115 表 4.7-6 查詢、新增、修改、刪除協控模式內容 API 說明 ... 116 表 4.7-7 新增、修改、刪除協控模式內容 API 說明 ... 117 表 4.7-8 依來源單位查詢所有 VD 設備即時資料 API 說明... 118 表 4.7-9 依來源單位查詢所有 VD 設備即時有無車資料 API 說明... 120 表 4.7-10 依來源單位查詢所有 VD 設備即時平均資料 API 說明 ... 121 表 4.7-11 列出所有路徑平均旅行時間資料 API 說明 ... 122 表 4.7-12 依來源單位、車輛偵測器代號與日期查詢設備歷史資料 API 說明 123 表 4.7-13 依來源單位、車輛偵測器代號與日期查詢設備歷史有無車資料 API 說 明 ... 125 表 4.7-14 依來源單位、車輛偵測器代號與日期查詢設備歷史平均資料 API 說明 ... 126 表 4.7-15 依路徑代號與日期列出路徑歷史平均旅行時間資料 API 說明 ... 127 表 6.2-1 各子功能依 RMI 實作需要架構說明 ... 137 表 8.2-1 委員會式區域中心運作表 ... 167 表 8.4-1 策略啟動時間範圍列表 ... 185 表 8.4-2 策略啟動時間範圍列表 ... 185 表 8.4-3 協控策略參數列表 ... 187 表 8.5-1 交控雲計畫 4-1 期策略執行內容 ... 201 表 8.5-2 竹北下匝道紓流策略啟動時間範圍列表 ... 206
表 8.5-3 竹北下匝道紓流策略啟動判斷邏輯列表 ... 206 表 8.5-4 竹北下匝道紓流協控策略參數列表 ... 207 表 8.5-5 竹北上匝道第 1 級截流之策略啟動時間範圍列表 ... 208 表 8.5-6 竹北上匝道第 1 級截流之策略啟動判斷邏輯列表 ... 208 表 8.5-7 竹北上匝道第 1 級截流之策略啟動判斷邏輯列表 ... 209 表 8.5-8 竹北上匝道第 1 級截流之策略啟動判斷邏輯列表 ... 209 表 8.5-9 竹北上匝道第 1 級截流之策略啟動判斷邏輯列表 ... 210 表 8.5-10 竹北上匝道第 1 級截流協控策略參數列表 ... 211 表 8.5-11 竹北上匝道第 2 級截流之策略啟動時間範圍列表 ... 212 表 8.5-12 竹北上匝道第 2 級截流之策略啟動判斷邏輯列表 ... 212 表 8.5-13 竹北上匝道第 2 級截流之策略啟動判斷邏輯列表 ... 213 表 8.5-14 竹北上匝道第 2 級截流之策略啟動判斷邏輯列表 ... 213 表 8.5-15 竹北上匝道第 2 級截流之策略啟動判斷邏輯列表 ... 214 表 8.5-16 竹北上匝道第 2 級截流協控策略參數列表 ... 215 表 8.5-17 竹北上匝道第 3 級截流之策略啟動時間範圍列表 ... 216 表 8.5-18 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 216 表 8.5-19 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 217 表 8.5-20 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 217 表 8.5-21 竹北上匝道第 3 級截流之策略啟動判斷邏輯列表 ... 218 表 8.5-22 竹北上匝道第 3 級截流協控策略參數列表 ... 219 表 8.5-23 竹北上匝道分流之策略啟動時間範圍列表 ... 221 表 8.5-24 竹北上匝道分流之策略啟動判斷邏輯列表 ... 221 表 8.5-25 竹北上匝道分流協控策略參數列表 ... 222 表 8.5-26 竹北上匝道分流之策略啟動時間範圍列表 ... 222 表 8.5-27 竹北上匝道分流之策略啟動判斷邏輯列表 ... 223
表 8.5-29 竹北上匝道分流之策略啟動時間範圍列表 ... 224 表 8.5-30 竹北上匝道分流之策略啟動判斷邏輯列表 ... 224 表 8.5-31 竹北上匝道分流協控策略參數列表 ... 225 表 9.1-1 成果觀摩會與教育訓練議程 ... 244 表 9.1-2 教育訓練執行成果照片 ... 245 表 9.2-1 成果觀摩會執行成果照片 ... 247 表 10.1-1 軟體主要新增功能 ... 251
第一章
計畫簡介
1.1 計畫背景與目的
交通部為全國交通主管機關,有責於維持全國交通管理系統運作之安全 與效率、掌握科技脈動,並引進創新科技管理方式。自 92 年起推動「智慧交 控系統」,配合交通環境之變遷、人口及車輛數目之急劇增加,目前已補助 18 個縣市政府建置交通控制中心,其對各縣市政府提升交通管理效率、降低 用路人旅行時間及節能減碳等有顯著成果,惟仍有「跨單位間(含縣市、高公 局及公路總局間)之區域交通控制協同管理」與「現有中、小型都市交通控制 中心軟硬體建置與後續管理維運」等問題亟需改善與解決。 近年來,由於資通訊技術的精進,雲端運算已成為主流思維,其以自動 化調派 IT 資源、快速部署與優異的延展性、可用性及高穩定性等優勢,可發 展整合式區域交通控制雲端系統平臺,亦能降低縣市交通控制系統之建置與 維運成本,同時強化跨單位之交通控制協同合作管理能力,提高交通控制之 實際效益,有效舒緩道路交通壅塞狀況,提升整體道路路網之行車效率與服 務水準,降低總體車輛油耗及空氣污染,以及提高民眾對交通管理作為之實 質感受與信賴度。因此,如何將雲端技術結合區域交通控制便是一項需要研 究的重要課題,其中雲端區域交通控制架構的規劃設計更是整體系統執行效 能的關鍵所在。 有鑑於此,交通部自 101 年度起推動為期 4 年「區域交通控制中心雲端 化計畫」委託研究發展案,以強化我國交通控制核心技術研發能量,並促進 區域交通管理無縫化,提供民眾全方位之交通應用資訊。而為考量「跨區域、 跨單位之無縫交通管理需求」及「雲端運算平臺可帶來之效益」,本計畫選擇 一個具有跨多單位交通管理需求之示範地區,透過「雲端技術」建構整合式 區域交通控制雲端系統之示範平臺。 本計畫希望經由雲端系統示範平台,可無縫、即時地整合各單位之交通 控制資料,並進行跨單位的交通管理協同合作,提高交通控制之實際效益, 有效舒緩道路交通壅塞狀況,提升整體道路路網之行車效率與服務水準,降 低總體車輛油耗及空氣污染,以及提高民眾對交通管理作為之實質感受與信 賴度;另本計畫之相關成果,可作為下一階段推動先進交通管理系統(ATMS) 之參考。1.2 計畫範圍與特色
雲端運算具有自動化調派 IT 資源、快速部署、優異的延展性、可用性及 高穩定性等特性,使其在發展整合式區域交通控制系統平台有極大優勢。且 其可無縫、即時地整合各單位之交通控制資料,故可進行跨單位的交通管理 協同合作,降低縣市交通控制系統之建置與維運成本,並強化跨單位之交通 控制協同合作管理能力。本計畫之主要目的為針對前兩期「區域交通控制中 心雲端化計畫(1/4)」與「區域交通控制中心雲端化計畫(2/4)」所提出之雲端 交通協控系統規劃架構進行調整,以 C-c-R 架構進行協控機制軟體開發與功 能擴充,並評估建立一標準化軟體之可行性,期望能將本計畫成果應用於智 慧型運輸系統中先進交通管理系統之參考。 本期雲端化區域交通控制資訊系統之建置有以下幾點目標: 1. 為發揮交通控制雲端化系統做為一跨單位平台,供不同控制中心間共 同監控及管理協控策略之功能,須建立適用於不同控制策略之設備啟 動判斷軟體,以及因應不同協控模式運作情境之模式管理功能。 2. 為發揮雲端系統功能,建立可重複應用之機制,本計畫將依據軟體功 能特性與定位不同,將其開發於 SaaS 層,並藉由發展資料交換 API, 以達到重覆利用之目標。 3. 依據 C-c-R 協控機制架構,進行交通控制雲端化平台軟體功能新增與 擴充,包含 API 之定義與建立、協控通訊協定之修訂、設備運作狀態 監控與交通資訊顯示及分析功能擴充。1.3 前期結論事項
前期計畫在期末部分主要完成以下工作項目:1.3.1 雲端化區域交通控制資訊系統建立
(一) 雲端化交控系統架構設計與營運規劃 依據交控雲系統的功能需求,設計交通控制雲端化架構以及後續發展 應用藍圖;同時進行交通控制雲端化系統營運規劃,提供 IT 運算資源的服 務,不同縣市或中央政府交通管理部門能以租用方式應用雲系統 SaaS 層提供的各項運算服務,以及軟體執行環境、硬體和網路資源。 (二) 交控雲資料庫建置 對應交控雲運作所需資料,建置四大類之資料庫表格,包括基本資料、 動態交通資訊(設施回報資訊/控制策略)、靜態交通資訊(設備組態/功能組態 /路網資料)、路網資訊(最佳化基本資料)、號誌時制計畫、協控記錄等資料 庫表格及其欄位。並已依據交控資料的定義,於資料庫軟體中加入對應的 表格。 (三) 號誌最佳化路網及參數設定操作介面設計 在雲端環境交控網站上,提供路網專案設定功能,用以建立號誌路口/ 來源路口/路段之屬性、車輛參數、交通流量、選擇演算法種類,輸入演算 法參數之基本資料。
1.3.2 國道 1 號新竹交流道光復路南向出口、新竹科學園區新安
路南向出口與幹道協控系統建立
(一) 依據調查與策略分析結果擬定新竹科學工業園區、竹北地區以及新竹 市地區主要路網與車流路徑。 (二) 就地區性交通壅塞及跨區域性交通問題依其車流路徑劃分三階段,各 階段分別對應「疏流」、「截流」及「分流」等交通控制策略,並對不 同交通狀況研擬個別門檻值,發展不同控制邏輯及控制模式。 (三) 分析國道 1 號竹北交流道南下至新竹科學園區新安路出口之交通壅塞 問題,提出 5 大區域壅塞成因,並研擬交通工程改善方法。 (四) 進行協控系統事前事後比較分析,顯示前期計畫採用的控制策略方法 對於 path1 之改善成效有限,尚賴交通工程改善措施增進其改善績效, 但對於園區、新竹市及竹北地區平面道路仍具相當大之改善成效。1.3.3 一、二期區域交控協調運作機制實作遭遇之困難
前期之雲端化區域交通控制系統實作時遭遇以下困難: (一) C-R 協控運作架構推動困難 4-1 期開發之「紓流模式」係屬適應性號誌控制(Adaptive Control)方法,因此為配合該模式於路側號誌控制箱即時演算需求,當交控雲系統(前期協 控系統)透過前期建置之有無車偵測器判斷已達協控之門檻,即透過資料交 換方式向新竹縣交控中心發送協控請求,待同意後由都市交控中心授權交 控雲系統(前期協控系統)對路側設備之控制權,交控雲系統(前期協控系統) 可直接將區域控制器演算之資料及路口號誌時制下載至路口號誌控器執 行;其中協控請求部分採用 C-c-R 的方式運作,設備控制部分則採 C-R 方 式運作,示意如圖 1.3-1 所示。但此 C-R 架構於實際執行上有其困難,分 述如下: 圖 1.3-1 C-R 區域協控整體系統架構示意圖 1. 網域設定問題 若欲採 C-R 架構則為了將路口號誌控制權直接開放交控雲系統控制, 勢必要開放其網域供交控雲系統連線,除設定上的困難外,亦容易產生 資安漏洞;且可能造成設備管理責任不易釐清,因此 C-R 協控架構推動 有其實務上之困難。 2. 號誌控制器問題 4-2 期時路口號誌控制器均由新竹縣交控中心控制,且於交控雲案 內並未自建任何路口號誌控制器,因此僅能由新竹縣交控中心進行控制;
而當時交通部補助新竹縣政府交控提升案亦尚未發包,號誌控制通訊協 定及其中心軟體均未完成相關功能,無法供交控雲系統(前期協控系統) 直接控制路口號誌控制器,因此無法達成預定之 C-R 功能。 3. 管理權責問題 若採用 C-R 架構,則表示賦予交控雲系統設備控制之主導權,指令 下達後將不經由各區域交控中心直達設備端,各區域交控中心無法檢核 控制策略之合理性,若產生更嚴重之交通壅塞或事故將無法劃分責任歸 屬,也不易說服各區域交控中心首長釋放控制權。 4. 反應時間問題 各區域內若因臨時交通狀況變化或事件發生需中止協控,因主導權 在交控雲系統,無法自行中止,須待請求交控雲系統歸還控制權後再行 處理,反應時間將較 C-c-R 架構為慢,衍伸後續問題。 (二) 一、二期原規劃為 C-R 架構,惟於推動過程中,受限各交控系統管理 單位之責任介面,導致系統無法運作,故改朝 C-c-R 架構發展,如圖 1.3-2。 (三) 因應本計畫協控而建置部分協控設備,尚未能整合納入各區交控系統 控制,為達成策略實測與前期計畫目標,相關設備及軟體均開發於前 期協控系統上,且未與交控雲系統以標準通訊協定整合,設備之控制 指令亦非由交控雲系統下載,造成交控雲系統無實際區域管理控制之 能力,僅有路況監控之功能。 (四) 基於以上情境,前期協控系統僅高公局完成 RMS 之協控通訊功能, 並配合測試 C-c-R 架構;而都市交控部分則無法執行實測,故於二期 期末階段討論中,建議於新竹縣市及科學園區交控系統提升案發包後, 將其架構全數回歸 C-c-R 架構。 因應前期協控系統非全數採 C-c-R 架構,故本期目標為配合調整架構及 擴增相關軟體,詳細內容請詳 3.1 節。
圖 1.3-2 整體協控系統運作架構圖
1.4 計畫流程
依本計畫研究主題與重點所規定執行之工作項目與程序,本團隊研擬工 作流程如圖 1.4-1,以達成本計畫之目標。 本計畫於期中階段已完成工作項目包含:本計畫「工作計畫書」之撰寫、 聘請專家學者作為計畫顧問、系統需求分析、軟體功能設計、通訊協定補充 研訂、操作畫面與資料庫設計、初步程式開發工作…等。主要工作內容為滿 足不同控制中心間共同監控及管理協控策略之需求,設計一採 C-c-R 協控機 制之交通控制雲端化系統架構及其相關軟體功能。在此系統架構與軟體功能 設計下,對前期所提之跨機構通訊協定草案內容進行修訂,並依據新增或調 整之軟體功能完成操作畫面與資料庫格式設計,以及期中階段所規劃之程式 開發工作。 並於期末階段完成系統開發工作,進行模擬測試以驗證本期系統開發之 功能。同時依本計畫所建立之交通控制雲端化平台架構,研訂推動組織之作 業程序,以利落實協控作業之推動。此外也已於期末階段辦理教育訓練及成 果觀摩會,以期能建立相關單位人員對本系統的了解及培養操作本系統的能 力,達到推廣計畫成果之目的。計畫開始 計畫結案 提送 工作計畫書 保固維運 期 中 階 段 期 末 階 段 維 運 階 段 系統需求分析 操作畫面、資料 庫設計 辦理教育訓練 與成果觀摩會 期 初 階 段 通訊協定補充 研定 軟體整合測試 軟體功能設計 程式開發 系統整合測試 系統實測與 問題研討 跨單位介面 整合 實作方法與 流程研擬 維運計畫 圖 1.4-1 計畫工作流程圖
第二章
區域交通協控雲端化軟體架構規劃
2.1 建立交通控制雲端化系統採 C-c-R 協控機制之軟體架構
本案於一、二期研究過程中,曾考慮協控運作系統架構依模式特性區分 為於路側即時演算模式及於交通控制雲端化系統演算之模式,但深入研析都 市及高公局交控系統相關設施操控及通訊協定後,發現各設備其實並無法由 交通控制雲端化系統直接控制,故未來協控應基於 C-c-R(交控雲端中心-交控 中心-路側設施)之架構開發,為達成此一架構,原一、二期由本計畫控制之 設備,應改接納入縣市交控中心監控,並調整交通控制雲端化系統之軟體架 構如圖 2.1-1,以符合未來需求。 圖 2.1-1 交通控制雲端化系統 C-c-R 區域協控軟體架構示意圖 圖 2.1-1 中明確定義交通控制雲端化系統及交控中心欲完成區域協控應 發展之相關軟體及各軟體之間的介面,其中交通控制雲端化系統之平台路網 CCTV VD CMS AVI ITC CCTV VD CMS AVI RMS 國道 交控 軟體 Video 工作站 國道 都市 靜態 建構通訊 動態 資料通訊 協控路網 建構管理 http:即時運作 http:變更顯示 http:即時運作 http:變更顯示 http:即時運作 http:變更顯示 通訊網路(Internet) 協控路網 動態畫面 協控模式 軟體 ITC 協控通訊 運 作 時 制 設備 啟動 判斷 (適合各 種策略 應用) 協控模式 軟體 註:1.ITC:號誌 2.CMS:資訊可變標誌 3.RMS:匝道儀控 4.BR:視訊廣播伺服器 即時資料 XML CMS 協控通訊 RMS 協控通訊 靜態 建構 動態 資料 XML XML XML Video BR http:即時運作 http:變更時制計畫 CMS 協控通訊 號誌 協控通訊 交通部 即時資料庫 即時資料 解析、 平滑、 插補、 儲存 BR 靜態 建構通訊 資 料 XML XML XML 都市 交控 軟體 控制 RMS 協控通訊 狀 態 動態 資料通訊 XML XML 交控雲(C) 交控中心 (c) 路側設備 (R) CMS 協控通訊 顯 示建構及動態畫面監控多已於前期研究中完成,請參考圖 2.1-1,係指其中之 靜態建構通訊、動態資料通訊、協控路網建構管理及協控路網動態畫面等。 而本期針對上述功能尚有進行擴充,相關內容已補充於 3.1.1 節圖 3.1-1 及表 3.1-1,這些沿用軟體之既有功能及擴充功能於表 3.1-1 中已詳細敘述。故本 期之軟體開發著重於協控模式軟體及設備啟動判斷軟體功能之擴充,其開發 需求如下: (一) 可整合不同單位發展之協控模式軟體 經由前期研究可發現,各單位欲依靠協控解決管轄區域內之交通問題, 應針對其交通狀況進行詳細調查及問題診斷分析,確認壅塞發生之時段、範 圍、方向及壅塞門檻值以初步釐清協控雙方應配合之控制策略。而依據各單 位道路線型及交通特性之不同,實難以發展一放諸四海皆通用之協控模式, 因此交通控制雲端化系統之功能實為一跨單位平台,供不同控制中心間共同 監控及管理協控策略,協控模式則應由各單位先行協調後建立於交通控制雲 端化系統,並符合下列需求: 1. 考量各單位間需協控管理之時段、範圍、方向及門檻等有其特殊性, 如國道與地方之需求時段與可承受之條件於不同區域,有不同之需求, 因此應建立一套可管理不同時段下,可具不同之運作考量條件,這些 條件可由個別區域之交通管理單位共同討論確立後輸入。 2. 為達成上述條件需求,協控模式可設定設備啟動判斷軟體之啟動條件、 相互關係等,以建構一套該需求下,協控策略之運作流程關係。 3. 協控模式亦可依新需求由任一單位研發建置,並藉由與設備啟動判斷 軟體之介接,完成模式之運算。 4. 協控模式安裝前應提供安裝者確認其所安裝軟體「未侵犯他人智財權」, 後續若產生相關侵權問題,可由平台管理者執行刪除。 5. 由於協控必須跨管理單位各方皆同意,並事前討論確定,故建議以重 現性交通問題為設計考量,並不納入非重現性或不特定之事件處理。 (二) 設備啟動判斷軟體功能擴充 為建立適用於不同控制策略之設備啟動判斷軟體,並可應用於各種協控 模式應用,本期之設備啟動判斷軟體擴充應符合下列需求: 1. 可依不同路段同時建立多個模組,以利依模式需求建立多重判斷式。
2. 設備啟動判斷之條件來源應包括即時交通資料、時段、模式軟體及其 他策略之運作狀態。 3. 本軟體應完成所有之協控指令產出,並接收通訊軟體回饋之設備運作 回報。 (三) 協控模式管理 各單位配合發展之協控模式因應不同情境(如假日、路段)等會有不同之 考量,因此應針對不同協控模式運作之情境予以管理,可包括不同時段、範 圍、方向等,僅有符合相關情境之模式,才會啟動運作。
2.2 發揮雲端系統功能並建立可重複應用之機制
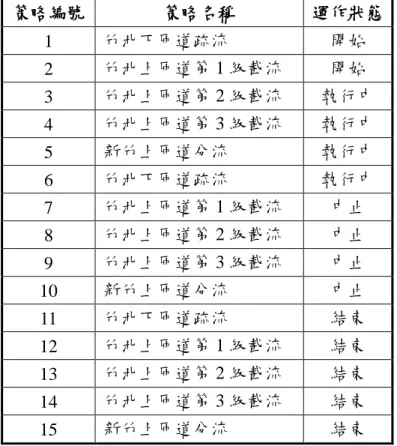
本計畫發展以雲端系統作為協控運作平台之重點在於可讓各單位以最小 成本介接應用交通控制雲端化系統功能,而不用大幅度調整其既有交控系統 軟體,因此本期發展交通控制雲端化平台重複應用機制內容如下: (一) 以縣市或區域路網為專案建立之基礎 由於一個區域路網為協控之基礎單位,每一個專案,應至少包括一個路 網,但為配合協控平台可供不同單位管理者容易監視,應具下列專案功能: 1. 每一專案可以包括數個區域路網,該路網可跨不同管理單位。 2. 為利於同一管理單位同時監視所轄之專案,應可以管理單位為基準, 同時監視其轄區之一個或多個專案。 (二) 建立重覆應用軟體平台 本平台軟體應可供重覆利用,於建立平台時可直接複製,未來新增專案 並不修改其軟體為目標。 1. 將可標準化之協控通訊軟體及設備啟動判斷軟體定位為軟體平台,並 設定模板,並預先將虛擬主機、作業系統、以及運算軟體等予以整合 封裝,於使用者提出運算需求時,可從模版進行佈署與執行。 2. 由於各專案之開立可能應用資料庫及相關平台,衍生授權費用等問題, 因此建議該類軟體設置於一台虛擬主機上,減少軟體授權費,並包括 靜態建構通訊、動態資料通訊等接收即時交通資料,並予以解析、平 滑、插補後存於資料庫內,供各軟體應用。3. 協控路網動態畫面、路網建構管理應用與即時資料處理等軟體一併配 置,故亦配置於軟體平台。 (三) 協控模式軟體 本層軟體以能個別重新開發建立為主,可從預先整合封裝的模版複製, 進行其他之佈署建置。 1. 因模式之建立與個別縣市或區域路網交通特性及需求有關,因此協控 模式軟體可由各參與協控單位發展個別模式,並部署至雲端系統。本 計畫將配合整合另案發包之新竹縣市及科學園區交控案所發展之模 式。 2. 已開發並完成部署之模式可以供直接複製使用,並透過網際網路存取 雲端的應用程式,但必須供輸入變更預設參數值以符合個別需求。 (四) 協控策略之軟體配置 各協控專案將依實際交通需求設定不同之策略,每一策略原則上僅啟動 一組設備,但可有不同之參數,其軟體程式佈置如圖 2.2-1。 圖 2.2-1 協控策略軟體執行配置示意圖 而雲端化軟體雖具有快速重複建置之功能,但無法應用於不同路網之特 RMS 協控通訊軟體 交控中心 CMS 協控通訊軟體 ITC 協控通訊軟體 交控中心 交控中心 設備啟動 判斷軟體 (No:1) 協控模式 軟體 (No:1) 策略編號:1;名稱:XX下匝道疏流 設備啟動 判斷軟體 (No:2) 協控模式 軟體 (No:2) 策略編號:2;名稱:XX上匝道截流 設備啟動 判斷軟體 (No:3) 協控模式 軟體 (No:3) 策略編號:3;名稱:XX上匝道分流 註:1.設備啟動判斷軟體不論策略為何,程式 相同,僅設定參數不同 2.協控模式軟體依策略,可開發不同軟體
殊需求。經一、二期之研究已可發現不同路網所需之參數、策略模式建構等 均不相同。因應此一特性,故本期新增「設備啟動判斷軟體」,以模組化軟體 及填列查表功能盡量達成一般化,以達成重複應用之目的;而將各地區具備 特殊性之策略模式部分予以獨立為「協控模式軟體」,另提供 API 以整合可 重複應用之部分,達成交控雲具重複應用之機制。請詳 3.1.1 節之圖 3.1-1 及 表 3.1-1 內關於軟體架構及軟體內容之說明。
2.3 雲平台軟體內容調整擴充
軟體架構定義完成後,將針對架構內各軟體功能及使用者需求進行軟體 設計開發,初步研擬本期軟體開發及調整擴充之需求內容如下:2.3.1 協控路網動態畫面軟體新增功能
為利於協控交管單位操作人員可以有效掌握協控行狀態、分析是否如 預期執行及因應即時路況之需,建議於二期之軟體基礎上擴增下列功能。 (一) 展示協控範圍內設備運作狀態 1. 協控範圍內之交通資訊收集設備,除既有之車輛偵測器、AVI/eTag 偵測器等之設備運作狀態(連線、斷線、設備運作中)以不同圖示顏 色表示外,另新增協控策略運作、協控設備運作狀態等,以利操作 者可立即明瞭目前資料收集情形,亦可作為判斷協控策略是否可續 行之依據。 2. 當協控機制啟動時,應顯示受控設備之運作狀 (連線、中斷或受協 控中),並以不同圖例顏色表示,另點選設備圖例後,可以查看其即 時運作內容。 (二) 整合 Google 路段績效(順暢、車多、壅塞等)圖層 原二期系統以一般 Google 地圖作為顯示區域協控路網之底圖。協控區 域內之即時交通狀況僅可由車輛偵測器等點狀資訊提供,較不直觀,因此 初步研擬利用 Google 地圖中之路況圖作為動態畫面之底圖,操作人員可以 直接觀察協控區域內各路段之壅塞情形。 (三) 顯示運作中之協控模式策略 1. 於動態畫面中以表列顯示各項協控策略,內容包括策略編號、策略名稱標註(如竹北疏流、竹科疏流、竹北截流等)及運作狀態。 2. 依據第三章 3.4 節協控模式軟體設計,應可點選協控策略欄位,觀 察下列資訊: (1) 協控策略:編號、名稱、運作狀態(運作中、停止、失敗中止)。 (2) 設備啟動判斷:相對應之協控策略編號及名稱;符合規則編號、 動作內容(RMS:儀控率、ITC:時制或編號、CMS:顯示內容) (四) 顯示平均旅行時間 1. 為利於觀測協控績效,初步研擬於路網圖中顯示設定路徑之旅行時 間。 2. 旅行時間演算來源為利用路段旅行時間加總。路段旅行時間來源可 由交控中心發佈之資訊或依所收集跨單位 eTag 偵測器資料比對取 得。
2.3.2 已開發之雲平台軟體調整
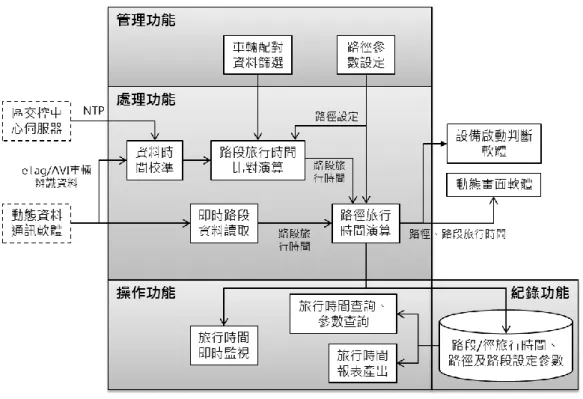
因應 C-c-R 架構確立,微調已開發之雲平台相關軟體,使其符合新定 義之軟體架構。 (一) 擴充與交控中心之資料接收模組 1. 更改從協控單位之交控中心,取得路側設施之 XML 格式動態資訊 (VD、CMS、RMS),若交控中心無足夠頻寬提供,仍依循由交通 部即時資料庫取得交通資訊。 2. 配合相關動態資料取得,亦應讀取路側設施之 XML 格式靜態資料 檔,原則上為每一天取得一次。 3. 本期應擴充由國道及都市交控系統讀取 CCTV 建構,以利點選取得 CCTV 視訊影像之 URL 位址,另針對本計畫所建置之 CCTV,若未 能改接納入交控中心並提供靜態建構,則本計畫仍依前期之建構辦 理 XML。 4. 原一、二期系統僅接收路段旅行時間資訊,為配合取得跨交控中心 間之旅行時間推估,故應接收 eTag/AVI 之原始資料,及其每一筆資 料通過偵測器之時間。本項資料目前尚未有 C-c 之標準通訊協定,故本期亦應配合增訂。 (二) 交通資訊處理 由於各區交控系統上傳之車輛偵測器為一分鐘原始資料,為利於各項 策略之應用及歷史資料統計分析,建議將所收集之交通資訊予以處理(如插 補、平滑等),如圖 2.3-1 所示,以產生即時交通資料表,供設備啟動判斷 軟體或策略模式軟體應用。 圖 2.3-1 交通資訊處理流程圖 (三) 車輛辨識資訊收集 1. 一、二期軟體尚未收集即時車輛辨識原始資訊,且交通雲亦未提供 相關訊息。若配合路徑旅行時間之建立,須由跨單位取得原始車輛 通過之辨識資訊(eTag 原始碼),將另訂相關 XML 格式,供各交控 中心依循建立。 2. 因應各交控系統之時間不一致,可能造成跨單位比對時之時間誤差, 故應增加 NTP 標準通訊協定詢問參與協控之交控中心時間基準與 交通控制雲端化系統之時間差,藉由所取得之時間差,即可校估跨 單位比對旅行時間因時間基準不同所產生之誤差。 路段旅行時間 即時資料表 資料處理 車輛 偵測資料 一分鐘交通 資料處理 往前平滑5分 鐘資料處理 eTag /AVI 交控中心 協控策略 路段各點 速度比較 旅行時間變化趨勢 流量/速度變化趨勢 設備啟動判斷軟體 策略模式軟體 即時平均 資料表 五分鐘交通 資料處理 交通 資料庫
因應C-c-R 架構確立,本節所建議的新增或修改功能需求,將在原 SaaS 層已提供的功能軟體基礎下,進行微調已開發之雲平台相關軟體,使其符 合新定義之軟體架構。 同時因應前期設備在本期執行期間將會被分散到各地方交控中心管理, 且目前非本案所建置之相關設備的部分資料係透過交通部路側設施即時交 通資料庫系統來介接使用,使設備動態資訊的即時性造成些許程度延遲的 情況。因此,建議本期可擴充與各地方交控中心之資料接收模組軟體與運 作環境,同時要求參與本案的相關地方交控中心,如高公局交控中心、新 竹縣交控中心、新竹市交控中心及竹科管理局交控中心等單位,依照「跨 機構交通資訊發布標準格式草案」定時發布七類(路段、VD、CCTV、CMS、 AVI、ITC、RMS)跨機構交通資訊 XML 檔案,以便讓交控雲端中心系統 可即時直接從各交控中心,接收路側設施之 XML 格式動態資訊。
表 2.3-1 已開發之交通控制雲端化平台軟體需擴充調整說明 項次 功能 現況概述 擴充內容 1 資料 接收 模組 1. 資料內容僅包含五類 XML 格 式(路段、VD、CCTV、CMS、 AVI)。 2. 資料介接方式有兩種:分別是 本案自建設備之 XML 資訊由 所建置之協控系統直接定時推 送; 其 餘 非 自 建 但 相 關 設 備 之 XML 資訊係由交控雲端中心 定時至交通部路側設施即時交 通資料庫系統擷取。 1. 增加 ITC、RMS 等內 容之 XML 格式解析 儲存處理軟體。 2. 擴 充 接 收 模 組 軟 體 之 運 作 環 境 及 其 他 必要的設定。 2 SaaS 服務 1. 包含有路況觀測、號誌最佳化 演算、跨單位協控、組態管理 等四類功能。 1. 加 強 協 控 門 檻 設 定 的擴充性,並訂定協 控 模 式 軟 體 與 交 通 控 制 雲 端 化 系 統 協 控 軟 體 間 之 標 準 介 面。 3 PaaS 服務 1. 提供兩類 API 分別為「平台管 理 API」、「資訊服務 API」供 交通控制雲端化系統 SaaS 層 及外部系統呼叫使用 2. 提 供 系 統 所 需 網 站 執 行 環 境,作為網頁佈署執行使用, 例如 JBoss 網站軟體 3. 提供交通控制雲端化系統資 料庫連接池,例如 MS SQL 資 料庫軟體,作為網頁資料的讀 取呈現、更新以及資料寫入動 作連接使用 4. 提供軟體程式語言執行所需 的環境,例如 Java 執行所需的 JDK、JRE 執行運作環境 1. 將在「平台管理 API」 此 類 別 內 新 增 一 組 與 協 控 模 式 軟 體 相 關的 API,包含模式 參數之註冊管理、模 式 演 算 之 即 時 資 訊 回報等介面,以供有 需 要 提 供 自 訂 協 控 模 式 軟 體 之 參 與 單 位使用。
2.3.3 必要之 API 定義與建立
配合第 2.1 節調整之協控新架構,定義必要之 API,以利未來可發展 個別之協控模式軟體。 (一) 設備啟動判斷軟體與協控模式間之 API 包括協控啟動條件、啟動回報、協控設備顯示內容、儀控率、運作狀 態等。 1. 協控模式軟體下載訊息至設備啟動判斷軟體 (1) 協控策略運作:啟動、結束或中止等命令。 (2) CMS:設備編號、顯示內容。 (3) RMS:設備編號、儀控率。 (4) ITC 運作模式:設備編號、運作模式編號。 (5) ITC 時制:設備編號、時制計畫。 2. 協控模式接收設備啟動判斷軟體 (1) 協控策略運作指令:各項指令下載成功、失敗。 (2) 讀取協控策略運作狀態列表。 (二) 即時資料擷取 為利於設備啟動判斷軟體及協控模式軟體皆可獲得即時交通資訊,而 不須藉由軟體傳達,故即時資訊建議以資料表方式提供,內容包括: 1. 即時交通資訊資料表:車輛偵測器一分鐘資料(分車道及不分車道之 速度、流量、佔有率)、車輛偵測器一分鐘資料(有無車)。 2. 即時平均交通資訊資料表:將插補及平滑之車輛偵測器一分鐘資料 (速度、流量、佔有率)建立資料表。 3. 路段旅行時間:每分鐘之路段平均旅行時間。 (三) 歷史資料擷取 將(二)之一分鐘即時資料、五分鐘平均資料及旅行時間資料,存成歷 史資料表,考量使用者以網頁查詢與調閱的反應時間,以 API 介面提供透過設備或路段代號、日期等條件,下載該設備或路段於最近一個月內之某 一天的歷史紀錄。 (四) 協控模式查表之參數 API 配合本計畫所開發之標準協控模式(採用查表法),可以引用簡單之運 算模式,故亦建議建立取得模式運算模組參數之 API。(另詳 3.4 節) (五) 歷史資料擷取,供統計分析應用之 API 歷史資料擷取供統計應用分析因內容繁多,若以 API 供讀取並不易於 未來軟體開發,而以開啟資料庫提供讀取介面較為合宜,故建議不提供此 類統計應用 API。
2.3.4 號誌協控功能開發
依一、二期所開發之協控策略,號誌時制控制方式依地方特性有二種 不同作法,為利於未來可適用不同區域與縣市交控系統之需求,本期初步 建議發展下列不同之協控運作機制: (一) 號誌時制由交通控制雲端化系統下載 1. 二期所發展之疏流及截流協控策略,係由交通控制雲端化系統計算 ITC 之時制,故 C-c 通訊協定應包括此一機制。 2. 交通控制雲端化系統之 ITC 時制將由協控模式或軟體產出,藉由設 備啟動判斷軟體於條件成就時,下載至號誌協控通訊軟體(詳 3.2 節)。 3. 由於二期竹科、竹市疏流策略、竹北截流策略係與地方號誌相關, 故該策略之協控模式軟體採由交通部補助縣市交控系統開發,依循 第二章所訂架構再以標準 API 與設備判斷啟動軟體介接,達成協控 整合運作。 (二)特定號誌協控模式下載 1. 因應未來協控模式可依縣市區域交控動態調整運作需求,如竹北疏 流策略(一期),即交通控制雲端化系統僅將下匝道或上匝道路口之 流量需求傳送至都市交控系統,號誌時制由縣市交控軟體自行運算。 故需配合新增以「啟動特定之時制運作模式編號(非時制)」通知都市交控系統。 2. 二期所訂之 C-c 通訊協定並無此項功能,故本期將配合增補號制協 控之通訊協定。 3. 雖協控策略無須由交通控制雲端化系統產生時制,相較於(一)之方 式,策略相當簡單,惟為維持交控雲端中心軟體架構之一致性,以 利未來遵循,仍應開發協控模式軟體,並依 3.4 節所訂架構重新調 整一期之軟體,達成標準平台之需求。
2.3.5 協控通訊協定檢討
(一) 因應協控架構確立為 C-c,故本期應開發與縣市交控系統間之協控通 訊軟體。 (二) 通訊協定檢討 1. 原於二期所訂協控通訊協定,係依循都市通訊協定 3.0 版及高速公 路交控通訊協定再加上 Rest Ful 應用之封包,以 http 傳送。惟於高 速公路中區與台中市之協控功能研析時,對於以交控終端設備通訊 協定為基底,再加封包傳送,交控系統須再解析反而較複雜。 2. 為利於未來於各單位推動容易,將配合評估原二期之方案或另訂 XML 方式之優缺點,據以研訂 C-c 標準通訊協定之訂定方式。2.3.6 新增歷史查詢及分析功能
(一) 為便利都市交控中心及交通控制雲端化系統操作人員分析協控成果, 新增相關歷史交通資料查詢及輸出報表分析之功能: 1. VD、一分鐘、五分鐘之歷史交通資料報表、趨勢圖;前 30 筆即時 一分鐘交通資料趨勢圖。 2. VD 有無車一分鐘資料。 3. AVI/eTag 原始資料查詢。 4. AVI/eTag 配對旅行時間歷史記錄查詢,前 30 筆即時一分鐘資料趨 勢圖。(二) 為利分析各項協控策略之運作情形及偵錯,應提供策略運作之查詢功 能,包括: 1. 各設備啟動判斷軟體之動作時間、內容等。 2. CMS 運作狀態及顯示記錄查詢。 3. RMS 運作狀態及儀控率記錄查詢。 4. ITC 運作狀態及時制計畫記錄查詢。 5. 協控策略運作狀態記錄。 (三) 歷史資料查詢可依下列條件: 1. 依策略編號為條件,選擇該策略下之所有設備或單一設備。 2. 選擇某一天某一特定時段。 3. 可選擇至少兩個不同且同一時段之記錄內容作比較,但為單一設 備。
2.3.7 都市動態資料通訊軟體擴充
依照交通部補助新竹市、新竹縣交控系統及新竹科園交控系統,將整 合一、二期車輛偵測器/eTag 偵測器/AVI 偵測器,並配合一、二期各項策 略之實作,都市交控軟體將完成相關通訊軟體,本計畫亦應配合增加下列 C-c 通訊軟體: (一) 車輛偵測器偵測「有無車」通訊功能擴充 1. 依據一、二期發展經驗,都市交控系統利用車輛偵測器偵測每一極 小時段之有無車情形,推算一定週期內之「有無車」時間比率,推 估路口車隊等候情形,據以實施動態時制之調整。 2. 因應上述功能需求,目前 C-c 通訊協定並未包括此項功能,故因應 此項需求於本期將配合增列此一通訊協定。 3. 除通訊協定增列外,亦應擴充下列相關軟體功能,使其可處理本「有 無車」偵測資訊: (1) 靜態建構通訊及功能資料通訊軟體:擴充可處理接收「有無車」 資訊。(2) 即時資料處理軟體:依所收集之「有無車」資訊傳送動態畫面 軟體,並存入資料庫及產生相對資料於即時交通資料表。 (3) 設備啟動判斷軟體:增加「有無車」規則之條件,可供作比較 判斷。 (二) 車輛辨識資料接收功能擴充 1. 因應路徑旅行時間建立之需,通訊軟體應配合 3.1.2(三)之通訊功能 需求,增加處理車輛辨識原始資料(eTag ID 碼)/車牌及通過偵測器之 時間。 2. 增加讀取交控中心之時間通訊功能,比較與交通控制雲端化系統之 時間差。據以校估通過偵測器之時間。 (三) 依據 2.3.4 節之協控號誌功能,建立相關號誌協控通訊軟體。
第三章
區域交通協控雲端化軟體設計
配合協控可因應不同區域之個別需求及 C-c-R 之運作需求,相關協控處 理軟體包括各設備協控通訊軟體、設備啟動判斷軟體及協控模式軟體等應重 新設計,另已開發之軟體除靜態建構通訊軟體、動態資料通訊軟體及協控路 網建構管理軟體等依循既設功能,其餘軟體本章將以各軟體之處理架構說明 相關功能設計,作為後續軟體開發之依據。3.1 軟體架構
3.1.1 整體軟體架構
本期軟體係配合協控改為 C-c-R 之運作,故將前期已發展之軟體予以 調整或重開發,整體軟體架構如圖 3.1-1。 圖 3.1-1 區域交控雲軟體架構擴充變更示意圖表 3.1-1 本期軟體功能調整、擴充或新增說明 軟體名稱 功能說明(含既設、擴充或新增) 備註 前期協控 軟體 既有功能: 因應直接控制一、二期終端設備所發展之監 控軟體 一、二期相關策略模式參數演算功能 配合 C-c-R 不再使 用 前期協控 判斷軟體 既有功能: 交通資料處理 依據每一設備設定之門檻及時間,啟動協控 策略,並由前期協控軟體下載協控指令 配合 C-c-R 不再使 用 靜態建構 通訊軟體 既有功能: 由交通部即時資料庫取得終端設施建構資料 XML 檔 沿用 動態資料 通訊軟體 既有功能: 由交通部即時資料庫取得高公局即時 VD 資 料 由前期協控軟體取得 VD、路段旅行時間資料 擴充功能: 由各交控系統取得即時 VD、eTag/AVI 原始車 輛資料、路段交通資料等。 沿用並擴充 專案建構 管理軟體 既有功能: 新增專案、使用者及相關專案參數設定 於地圖上圈選協控範圍及相關受協控設備完 成建構資料 擴充功能: 可由表列建構資料輸入完成設備建構 沿用並擴充 號誌時制 設計 既有功能: 離線計算連鎖路口號誌之時制最佳化解 沿用 動態畫面 既有功能: 以 Google 路網圖為底圖 提供管理人員登錄處理 路網圖左側提供各項功能選項,可點選進入 上述各項功能操作 可查詢即時及歷史交通資料 擴充功能: 增加本期新增協控操作選項,據以操控新增 功能 以 Google 交通資訊為底圖 終端設備狀態可以不同顏色顯示 可設定顯示重要路徑旅行時間及協控策略運 作狀態 沿用並擴充
軟體名稱 功能說明(含既設、擴充或新增) 備註 協控通訊 軟體 既有功能: 與高公局 RMS 協控指令連線 調整功能 配合 C-c-R 架構,調整原二期所訂之協控通 訊協定,修改通訊軟體功能 新增功能: 配合 C-c-R 架構,與都市交控連線下載協控 指令,並接收指令執行結果 沿用並調整及擴充 即時資料 處理軟體 新增功能: 將所收集 1 分鐘 VD 原始資料予以累算為不 分車道資料 為利於資料判斷比對,將 VD 資料予以滑動 平均 提供歷史資料統計分析功能 本期新增 ( 主 要 產 生 相 關 資 料,供各項可能之 協 控 策 略 演 算 使 用、無須額外作資 料處理) 旅行時間 推估 新增功能: 收 集 跨 不 同 交 控 系 統 之 路 段 旅 行 時 間 及 eTag/AVI 車輛辨識資料 比對車輛辨識資料產生路段旅行時間 依推估路段旅行時間計算路徑旅行時間 可查詢歷史資料及趨勢圖 本期新增 ( 透 過 跨 交 控 系 統 之資料收集,達成 協控路網內重要路 徑旅行時間,以利 觀察績效) 設備啟動 判斷軟體 新增功能: 可設定不同策略之啟動軟體(利用表列方式填 列、易於共同討論) 當策略條件成立時,依協控模式軟體產生之 策略參數,予以封裝為協控指令 接收協控指令執行結果,予以記錄 本期新增 ( 由 於 交 控 雲 將 建 立 一 個 共 通 之 平 台,且因應不同協 控區域之策略特殊 需求,因此將設備 啟動判斷設定為一 個通用化之軟體, 並可將參數設定表 格化,供策略討論 確定後輸入) 協控模式 軟體 新增功能: 利用 API 與設備啟動判斷軟體溝通,傳遞協 控策略之參數 建立查表法,可將一期之協控策略輸入 記錄協控策略執行參數 本期新增 ( 本 軟 體 可 依 各 協 控單位之需求個別 開發,為利於測試 二期協控策略模式 將由新竹縣市及科 學園區交控中心完 成後佈署)
3.1.2 重要軟體設計名詞定義
為利後續軟體開發,對於重要軟體設計名詞先行定義,並說明其內容 如表 3.1-2 所示。後續擬定協控標準作業程序及協控委員會組織討論協控 策略及規則,亦建議以此名詞為討論依據。 表 3.1-2 重要軟體設計名詞定義 名詞 定義內容說明 一、協控相關指令 1.協控開始 指對於某交控中心請求同意開始啟動某一協 控策略之機制。原則上各交控中心應設計一個 機制,當接收協控策略開始請求時,應提醒操 作者視當時之情境回應同意與否。 2.協控動作指令 指對某一設備下載動作指令 A.基本參數:協控策略編號、協控策略下載時 間、設備編號、結束執行時間。 B.CMS:顯示內容; C.RMS:儀控率。 D.ITC:時制計畫(直接下載新的時制,ITC 即 時依新時制執行) E.ITC 運作模式:群組代碼(預先設定納入某一 連鎖運作之群組,並予以代碼,由委員會討 論決定)、號誌時制運算模式編號(預設號誌 時制演算方式之編號,由委員會討論決定)。 3.協控中止 指交控中心針對運作中之協控策略因某些異 常因素(如交通狀況不允許或設備斷線等),無 法繼續協控策略,回覆交控雲中止協控策略。 4.協控結束 當協控策略時間到,由交控雲端下指令結束協 控,交控中心並回覆確認封包。或交控中心因 預設時間終了,回傳動作結束指令。 二、協控策略 1. 策略編號 (STNO_XX) 針對每一個專案下之個別策略訂定一個獨立 之編號。名詞 定義內容說明 2. 策略名稱 (STNA_XX) 為利於委員會成員討論及操作人員識別,故予 以個別名稱。每一名稱應包括「地區」(如竹 北-新竹) +「道路名」(上匝道、園區路)+「策 略模式名稱」(疏流、截流、分流、一級截流)。 3.策略參數 每一策略將啟動一系列之協控設備,每一協控 設備之動作即為策略參數。 4.策略運作狀態 A.策略開始/結束 已下達協控開始/結束指令,並獲得交控中心 同意回覆;或交控中心回應結束。 B.策略執行中 動作指令下達,並接收到執行結果回報。 C.策略中止 交控中心主動中止協控策略或斷線。 三、設備啟動判斷相關參數 1.策略啟動條件名稱 (STTR_X) 對於每一個啟動之時段予以一個條件,每一個 策略啟動時間範圍對應一個策略啟動機制規 則。 2. 策 略 啟 動 判 斷 規 則 (TPDR) 每一規則可以設定多組判斷式,包括「即時交 通資料表」、「即時平均交通資料表中之任一參 數」及「前 5 個週期內之參數」等與設定門檻 值比對;結合其他策略啟動與否之判斷;並可 針對上述各種不同條件同時作多條件綜合判 斷(AND/OR)。 3.子條件編號 (TPRU_X) 每一策略啟動判斷條件中之一條判斷式為一 子條件,該子條件包括啟動判斷條件、解除判 斷條件,並可執行 AND 或 OR 邏輯。 四、協控設備 1.協控設備編號 依各交控中心上傳交通部即時資料庫之建構 檔中所編列之設備編號,用以對應各交控系統 之設備。
名詞 定義內容說明 2.協控設備運作狀態 A.設備連線 週期性收到協控設備之執行內容封包,包括由 協控動作指令回報或交控系統傳送之顯示內 容封包。 B.設備連線斷線 3 分鐘未能接收設備回傳之即時運作內容資 料,視為斷線。 C.協控執行成功 由交控中心週期性回報協控動作指令之執行 結果封包,當回報內容與下載指令相同為執行 成功。 D.協控執行中止 由交控中心週期回報協控動作指令執行結果 為「中止」。 E.協控執行結果不符 當交控中心回報結果與下載指令不同,則為不 符。 F.協控結束 由交控雲端判斷協控策略時間到或手動結束 協控策略,相關設備顯示協控結束。或交控中 心依預設協控結束時間回報協控結束。
3.1.3 相關關軟體列表說明
表 3.1-3 重要軟體設計名詞定義 名詞 定義內容說明 一、即時資料處理軟體 1.即時資料表 於即時資料處理軟體中依標準通訊 協定解析並篩選自偵測器取得之一 分鐘交通資料。將累算一分鐘交通資 料(速率、流量、佔有率)及有無車資 料輸出為即時資料表,可以 API 供協 控模式軟體、設備啟動判斷軟體讀 取。 2.即時平均資料表 於即時資料處理軟體中經滑動平均 之平均速率、總流量、平均佔有率, 以及經資料異常檢核計算之資料統 善率。名詞 定義內容說明 二、設備啟動判斷軟體 1.策略運作狀態列表 由設備啟動判斷軟體將策略編號、策 略 名 稱 與 其 運 作 狀 態 寫 入 此 列 表 中,可顯示目前各策略運作狀態。 2.即時協控設備運作狀態列表 將參與協控之設備編號、連斷線狀 態、策略運作狀態、中止原因及策略 參數寫入表格內容,每分鐘更新一 次,供操作人員監控設備運作狀態。 3.策略啟動時間範圍列表 以策略啟動之時間範圍為條件,包括 日期與時段,於時間到達時自動依照 策略啟動判斷條件啟動策略。 4.策略啟動判斷邏輯列表 將各策略之啟動門檻賦予一策略啟 動條件名稱,以條件判斷的方式設定 其子條件(VD 流量達一定數量;車輛 壓佔偵測區時間達設定秒數),再以 子條件間之交集或聯集關係決定策 略是否啟動。若啟動即將策略執行參 數傳送至協控通訊軟體,讓各區域交 控中心下傳各設備執行。 三、協控模式軟體 1.協控策略參數列表 主要依照策略啟動條件名稱設定其 策略啟動時須作動之設備,以及該設 備執行之 參數 ( 如號 誌時制、 儀控 率);另可依照各交控中心需求輸入 策略執行優先權,納入排程中執行。
3.1.4 各軟體基本架構說明
為利於說明各軟體之運作及其相關功能需求,將以圖示各軟體內功能 模組運作之流程及與他軟體、模組之資料傳送/接收關係,每一軟體架構皆 具下列規定: (一) 輸入及輸出介面 原則上由接收端定義為主,若輸出端與輸入端不同,以輸入端之軟體 定義為主。(二) 處理功能 說明本軟體所應處理產生之資訊及功能。 (三) 記錄功能 說明本軟體應被記錄之資料內容,相關內容應儲存資料庫。 (四) 管理功能 1. 本功能僅提供具管理者權限之人員操控。 2. 主要規範對該軟體之各項參數、建構等之設定、修訂。 3. 本功能應可由登入交通控制雲端化系統之工作站操作。 (五) 操作功能 1. 本功能提供一般操作人員使用,所有權限人員皆可操控。 2. 主要規範相關處理功能之確認或所需資料之輸入,另供記錄查詢、 列印等。 3. 本功能應可由登入交通控制雲端化系統之工作站操作。