高解析度衛星影像之
定位精度研究
林義乾
指導教授:趙鍵哲
2005/04/01
前言
不提供衛星軌道參數,其中包含
IKONOS 與 ROCSAT-Ⅱ
之影像。
沒有軌道參數的情形下,僅能使用幾何模式的仿射轉換和
有理函數模式進行幾何校正的工作,因此本次報告之模式
主要著重於仿射轉換以及一階、二階有理函數模式。
取得控制點資料的方式有數種,如地形圖、正射影像、
G
PS 實地量測等,為分析比較在各種情形下可達之定位精
度,探討控制資料來源對定位精度之影響亦是本次報告之
主題之一。
相關文獻回顧
~2
Toutin 於 2004 以 National Capital Region of Can
ada 的 QUICKBIRD 影像進行控制資料來源對定位
精度影響之實驗
方法回顧
~1
高解析度衛星影像
方法回顧
~2
多項式轉換與仿設轉換
) 1 3 ( 1 2 0 3 0 1 2 0 3 0
n o i n j n k k n j n i n ijk m o i m j m k k n j n i n ijk Z Y X b c Z Y X a r)
2
3
(
8 7 6 5 4 3 2 1
b
Z
b
Y
b
X
b
y
b
Z
b
Y
b
X
b
x
i i i i i i i i方法回顧
~3
有理函數模式
, ,
(3 3) , , , , , , 1 0 2 0 3 0 1 0 2 0 3 0 4 3 1 0 2 0 3 0 1 0 2 0 3 0 2 1
n i n j n k k j i ijk m i m j m k k j i ijk n i n j n k k j i ijk m i m j m k k j i ijk Z Y X d Z Y X c Z Y X p Z Y X p c Z Y X b Z Y X a Z Y X p Z Y X p r方法回顧
~4
利用
DLT 計算有理函數模式參數初始值:
1 2 3
3 4
3 2 1 0 3 2 1 3 2 1 0 Z d Y d X d y Z c Y c X c c y Z b Y b X b x Z a Y a X a a x
3 5
10 2 9 3 2 1 10 2 9 3 2 1 0 10 2 9 3 2 1 10 2 9 3 2 1 0 XYZ d Z d Z d Y d X d y XYZ c Z c Z c Y c X c c y XYZ b Z b Z b Y b X b x XYZ a Z a Z a Y a X a a x方法回顧
~5
利用
DLT 計算有理函數模式參數初始值:以一階 RFM 為
例
n n n n n n n n n n n n n n n n n n n Z y Y y X y Z Y X Z x Y x X x Z Y X Z y Y y X y Z Y X Z x Y x X x Z Y X A 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 14 2
1
3 6
1 1 1 50 3 2 1 3 2 1 0 3 2 1 3 2 1 0 1 14 L A A A X y x y x L d d d c c c c b b b a a a a X T T n n T T模擬實驗成果與分析
模擬實驗場配置
~1
模擬的影像為
IKONOS 衛星影像
假設衛星高度 681 公里,焦距 10 公尺,地面解析力為 1 公尺。 假設今有一影像大小為 13816×13000 ( Line×Sample ,本實驗
模擬實驗場配置
~2
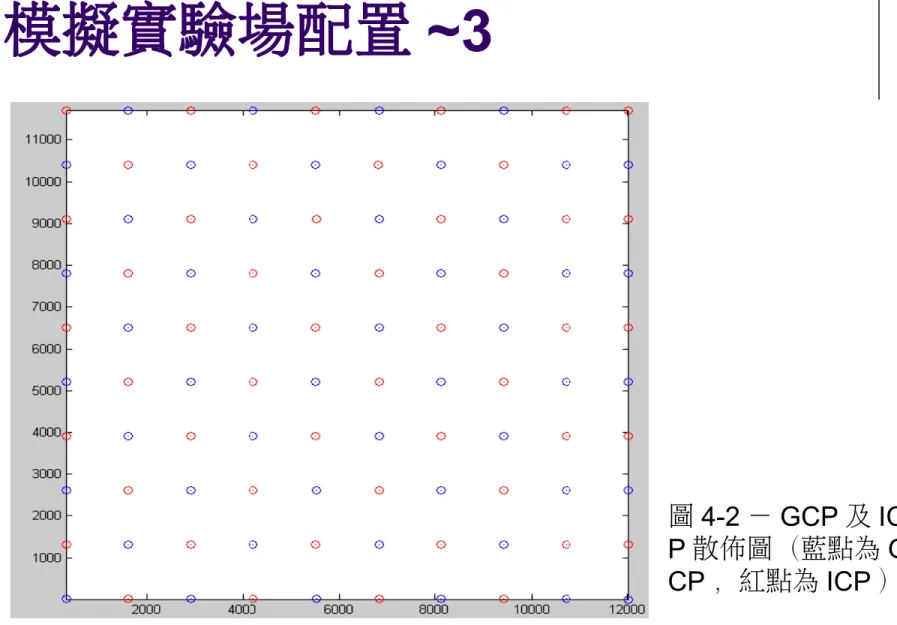
取得各列影像之外方位參數後,假設影像上有一百個均勻分布的點位 如下圖,由像點進行倒投影至地面,以光束法( 4-1 式)交會虛擬之 DEM 得到地表之平面坐標 4 1 ) ( ) ( ) ( ) ( 33 0 23 0 13 32 0 22 0 12 33 0 23 0 13 31 0 21 0 11 f m y y m x x m f m y y m x x m Z Z Y Y f m y y m x x m f m y y m x x m Z Z X X t t t t t t Lt Lt t t t t t t Lt Lt模擬實驗場配置
~3
圖 4-2 - GCP 及 IC P 散佈圖(藍點為 G CP ,紅點為 ICP )
隨機誤差
根據不同的控制資料來源,給定不同的隨機誤差等級
,仿照
Toutin 的實驗中之誤差量,並由亂數產生器自
動給定。
1 : 50000 地形圖:控制點之平面與高程精度為 10m ,像
點量測誤差為
1pixels 。
正射影像:控制點之平面與高程精度為
3-5m (統一給定 5
m 之隨機誤差),像點量測誤差亦為 1pixels 。
手持式
GPS :控制點之平面與高程精度為 2-3m (統一給定
3m 之隨機誤差),像點量測誤差為 1pixels 。
DGPS :控制點之平面與高程精度為 0.2m ,像點量測誤差
為
1pixels 。
實驗
1~1
情形下之推掃式影像,地形高差起伏為
500 公
尺。
,
0
0
圖 4-3 -實驗場 1 之數值地形模實驗
1~2
三維仿射轉換與一階
RFM 實驗成果:
實驗
1~3
成果分析
此實驗場之 DEM 雖然變化頗為劇烈,但對於衛星高度( 681 公 里)而言,此變化比例( 500 公尺)相當小,且由於攝影傾角較 小,故可將地表視為一平面。 本實驗場中,理論上仿射轉換已可有效的描述物像對應關係,由 上列成果得知,使用不同控制資料時皆符合理論情形。 由 GPS 與 DGPS 取得控制資料來源,在此實驗場中,仿射轉換 與一階有理函數皆可達到不錯的定位精度,可提供作為後續相關 之應用。 使用二階有理函數時,雖可收斂求解,但因秩虧的情形以及 RM S 報告,推論其解不正確,模式仍有待驗證。實驗
2~1
情形下之推掃式影像,地形高差起伏為
500 公
尺。
圖 4-4 -實驗場 2 之數值地形模 型(未加入隨機誤差) , 30 30 實驗
2~2
三維仿射轉換與一階
RFM 實驗成果:
實驗
2~3
成果分析
由於攝影傾角較大,推論有理模數模式較能描述此一實驗場之物 、像幾何。 由於仿射轉換乃是基於平行投影之概念,將像空間與物空間視為 兩個平行無傾斜之平面來進行幾何校正,因此在攝影傾角較大的 情形下,理論上應無法有效的描述物像幾何 。 本實驗中,類似於投影轉換(二維八參數轉換)之ㄧ階有理函數 模式,可較有效的描述物、像對應關係,但必須使用由 DGPS 蒐集的控制資料,才可勉強做為後續製圖使用 。 此實驗場使用二階有理函數模式時,利用 DLT 計算得到的初始 值無法落於收斂區間,且有秩虧情形,導致計算發散,故計算初 始值之方式與數學模式仍有待驗證。實驗
3~1
情形下之推掃式影像,地形高差起伏為
3500
公尺。
圖 4-5 -實驗場 3 之數值地形模 ,
0
0
實驗
3~2
三維仿射轉換與一階
RFM 實驗成果:
實驗
3~3
成果分析
此實驗場之 DEM 雖然變化頗為劇烈,且此變化比例( 3500 公 尺)相較於實驗 1 、 2 大幅提升,故無法將地表視為一平面 , 因此推論有理函數較可達較佳之定位精度 。 仿射轉換將物、像空間皆視為平面,當影像涵蓋區域之地勢起伏 較小時,可有效的描述物像幾何,但若地勢起伏較大時,不論提 供何種精度之控制資料,定位精度皆有限 。 一階 RFM 並非將地表視為平面進行幾何校正,但在地勢起伏較 大實驗中,仍會受到部份影響,必須使用由 GPS 或 DGPS 蒐集 之控制資料才可達到理想之定位精度。 使用二階有理函數時,雖可收斂求解,但因秩虧的情形以及 RM S 報告,推論其解不正確,模式仍有待驗證。實驗
4~1
情形下之推掃式影像,地形高差起伏為
3500
公尺。
圖 4-5 -實驗場 3 之數值地形模 型(未加入隨機誤差) , 30 30 實驗
4~2
三維仿射轉換與一階
RFM 實驗成果:
實驗
4~3
成果分析
此實驗場之 DEM 雖然變化頗為劇烈,且此變化比例( 3500 公 尺)相較於實驗 1 、 2 大幅提升,故無法將地表視為一平面,且 其攝影傾角較大,因此推論有理函數較可達較佳之定位精度。 理論上,仿射轉換無法描述攝影傾角較大以及地勢起伏較大時之 物像幾何,本實驗場同時模擬此兩種情形,故可推論定位精度會 相當差,而實驗成果與理論預期相同。 一階 RFM 較不會受到攝影傾角與地勢起伏的影響,仍可有效的 描述物像幾何,但在此實驗中,必須使用 DGPS 取得之控制資 料才可達到理想之定位精度。 此實驗場使用二階有理函數模式時,利用 DLT 計算得到的初始 值無法落於收斂區間,且有秩虧情形,導致計算發散,故計算初 始值之方式與數學模式仍有待驗證。結論
~1
在觀測方程式中加入控制點的虛擬觀測量,可部份吸收因
隨機誤差造成的誤差,但
GCP 的 RMS 大小卻與給定的
隨機誤差量成反比,乃由於設定權矩陣所造成之結果。
利用
DLT 的方式計算一階 RFM 參數之初始值時,雖在傾
角叫大的實驗場都會造成
A 矩陣秩虧,但由 RMS 報告推
測皆可順利的落於正確收斂區間。但計算二階
RFM 參數
初始值時,卻有落於錯誤區間以及嚴重秩虧(未知數
192
個,
rank<30 )的情形,導致二階 RFM 無法順利解算,
其數學模式與計算程式仍有待檢察驗證。
仿射轉換之定位精度,受攝影傾角之影響情形,較受地勢
起伏之影響情形嚴重,推論應是平行投影之影響會比將地
表視為平面之影像為劇 。
結論
~2
在上述之實驗成果中,可得知一階有理函數在各種情形下
皆可達到最佳之定位精度,但若要達製圖應用所需之定位
精度,仍需以
GPS 或 DGPS 來獲取控制資料才可。
控制資料來源會對定位精度有相當的影響,但在實務上必
須考量業務需求,來選擇適當之控制資料,以避免不必要
之時間及成本支出。
參考文獻
~1
Tao C.V and Y. Hu,2000,”Image Rectification Using a Generic S
ensor Model - Rational Function Model”,ISPRS 2000 。
Di K., R. Ma and R. X. Li, 2003,”Rational Functions and Potential
for Rigorous Sensor Model Recovery”, Photogrammetric Enginee ring & Remote Sensing, Vol. 69, No. 1, January 2003, pp. 33-41 。
Miyata T. and M. Takagi, 2004,”Acquisition Method of High Resol
ution Ground Control Points For High-Resolution Satellite Imager y”, ACRS Proceedings, Chiang Mai 。
Toutin Th., R. Chenier,2004,”GCP Requirement For High-Resolu