多模干涉器的場理論及元件物理
97
0
0
全文
(2) 誌. 謝. 本篇論文的完成,首先要感謝我的指導教授 張弘文博士,在他 悉心的教導之下,使我可以在數值理論的基礎上紮根,並且對於論文 理論以及程式方面給予多方的協助,並使我在對學習研究以及為人處 事上獲益良多。另外還要感謝所上的老師在學業上所提供的協助,由 於他們的教誨,使我獲得不少知識以及幫助。 同時要感謝在實驗室中的三位博士班學長盛夢徽、吳祚倫、程偉 麒,碩士班學長劉漢強、洪慶龍、傅立平、李致偉、蔡昴勳、王勝明, 兩年來照顧我的學業以及生活的照顧,同時在作論文過程時更是提供 了不少寶貴的建議,也感謝學弟建銘、易錚、仁光、昇默、宗桂在口 試期間的幫忙,讓我能安心準備口試。 最後要感謝我父母辛苦的養育和栽培,以及我哥哥的熱切指導, 有了他們在背後的大力支持,我才能夠完成碩士學業以及論文研究。 本 論 文 感 謝 教 育 部 大 學 學 術 追 求 卓 越 發 展 計 畫 (MOE 甲 -91-E-FA08-1-4)和國科會-特殊數值方法在積體光學平面光波導的分 析及應用(NSC 93-2215-E-110-007)的贊助,以及量子元件實驗室馮瑞 陽學長所提供之元件參數。 黎聯群 2006. 06 于西子灣 I.
(3) 中文摘要 多模干涉器(multi-mode interference devices , MMI)具有特定比例 的光功率分離及結合的功能,能有效的作為光訊號的迴路,且因具有 頻帶寬、波長極化不敏感等特性,故適合應用在光學積體化上,基於 自我成像原理(self-imaging principle),MMI 形成多個模態後,而產生 相互干涉的作用、以達到光功率分離及結合的功能。 一般在設計 MMI 之前,會先使用商業軟體來進行模擬分析,包 括了 BPM、FD-TD、FD-FD、mode matching 等理論,然而市面上許 多的商業軟體並未考慮反射的情況,且計算時間過長,所以還需要更 好的方法來分析。因此我們提出兩種新式的理論,一種是不考慮反射 的近似理論,全特徵模態展開法(full eigen-mode expansion technique, FEMET),另一種方法則是將反射的情況加入的精確理論,耦合橫向 模態積分方程式(coupled transverse mode integral equation, CTMIE)。 比較 FEMET 與 CTMIE 數值模擬上的結果,發現 CTMIE 理論計 算精準,但在撰寫程式方面困難,且運算時間會較長於 FEMET;而 FEMET 雖然為近似解,但在設計參數正確時,計算的準確度與 CTMIE 相當,運算時間亦較少,適合做快速且精準的模擬分析。. II.
(4) Abstract Multimode interference (MMI) devices operate based on the self-imaging principle. A single mode input from the input waveguide is converted to multiple modes in the interference region. By properly choosing the width and length of this section, energy distribution at the output end forms a specified ratio. Thus the MMI device is commonly used as the optical power divider in the integrated optics. The MMI devices operate at a high bandwidth and are insensitive to polarization and small variation of device dimensions. In general, MMI manufactures use commercial simulation software to design MMI devices. However, the beam propagation method (BPM), which is the most commonly used method, assumes small angle approximation and ignores wave reflections.. Other more rigorous numerical methods such as finite-difference. time-domain (FD-TD) and mode matching methods consume too much computer resources and are therefore can not handle large devices like the MMIs. Therefore, we propose two novel numerical schemes to study MMI devices. The first one called full eigen-mode expansion technique (FEMET) includes all necessary modes but neglects reflection at the dielectric discontinuities. The other method considers all modes traveling in both directions is based on the coupled transverse mode integral equation (CTMIE) formulation.. It is most rigorous among all methods and is. capable of handling very large device structures. In this thesis, we report the demonstration of MMI devices by efficient FEMET and rigorous CTMIE methods.. Comparing the two novel studies, the CTMIE. approach although highly accurate, it is much more complex and is very difficult to program.. It also spends much more computer time than FEMET.. On the other. hand, FEMET method, being an approximate theory, produces results that are very close to that of the CTMIE results for MMI devices that are correctly designed.. We. found that either one of the two novel methods are able to compute quickly and accurately for adiabatic MMI devices.. III.
(5) 目錄 第一章. 導論. 1. 1. 1. 簡介. ......... 1. 1. 2. 多模干涉器的近似理論. ......... 3. 1. 3 ABCD matrix 模態解. 第二章. FEMET 理論分析 MMI. ......... 10. 17. 2. 1. FEMET 理論基本觀念. ......... 17. 2. 2. TE 入射 FEMET 理論架構與推導. ......... 19. 2. 3. 數值模擬結果. ......... 23. 第三章. CTMIE 理論分析 MMI. 34. 3. 1. CTMIE 理論基本觀念. ......... 34. 3. 2. 對稱性理論. ......... 36. 3. 3. TE 入射 CTMIE 理論場量積分形式推導 ......... 38. 3. 4. PQRS 聯立積分方程矩陣. ......... 45. 3. 5. 重疊積分. ......... 48. 3. 6. 數值模擬結果. ......... 55. 第四章. 比較與討論. 64. 第五章. 1 × 4 MMI 高階模態效應. 76. 5. 1. 元件架構. ......... 76 IV.
(6) 5. 2. 高階模態效應. ......... 79. 5. 3. 結果討論. ......... 83. 參考文獻. 88. 中英文對照表. 90. V.
(7) 第一章 導論 1. 1 簡介 積體光學波導元件其與傳統光學元件比較,具有質量輕、操作頻 寬大、體積小、穩定性高及低損失等優點,因此積體光學元件的應用 愈來愈廣泛。在光積體電路中需將光信號做特定比例的輸出,以利做 信號傳輸使用,而多模干涉器(multimode interference devices, MMI) 便因應此功用而發展出來。MMI 基於自我成像原理(self-imaging principle)[1],單模光入射至 MMI 內部形成多個模態,由於不同的模 態其傳輸速度不同,而產生相互干涉的作用,經過干涉距離後得到特 定週期的建設性或破壞性結果,因此具有特定比例的光功率分離及結 合的功能,能有效的作為光訊號的迴路,且因具有頻帶寬、波長極化 不敏感等特性,故適合應用在光學積體化上。 本篇論文將對 MMI 做個完整的討論與模擬,並比較其他文獻之 模 擬 結 果 。 基 本 上 在 分 析 MMI 結 構 有 BPM (beam propagation method) 、 FD-TD (finite difference, time domain) 、 FD-FD (finite difference, frequency domain)、Fimm Wave(film mode matching method) 等,但對多模干涉器而言,BPM 在高階模態模擬比較不精準,且在 介面上不能處理反射的問題;而 FD-FD 計算矩陣過於龐大,無法計 算大尺度 MMI 元件;FD-TD 在輸入與輸出端的波導結構的吸波條件 1.
(8) 不太好處理,誤差較大;Fimm Wave 可以計算三維的結構,但所費時 間許久,所以還需要更好的方法來分析。 針對這些情形,本實驗室提出兩種理論,一種是不考慮反射的近 似理論:全特徵模態展開法(full eigen-mode expansion technique , FEMET),首先定義每一區的場量型式及模態基底,利用在界面上場 連續的觀念,可推導出各區的模態轉換係數,如此便可分析出不包含 反射情況的近似解。另一種方法則是將反射的情況加入的精確理論: 耦合橫向模態積分方程式(couple transverse mode integral equation, CTMIE),相同的,首先在考慮反射的情況下,定義每一區的場量型 式及模態基底,再利用在界面上場連續的觀念,可推導出每個界面的 橫向模態方程式,接下來我們引用積分運算子的想法來簡化問題,進 一步透過正交投影將積分運算子轉化成腰寬為 3 的區塊對角線矩陣 方程,解這個矩陣方程求出各個模態的反射與穿透係數,即可分析出 包含反射情況的精確解。 本篇論文的主題,即在於提出這兩種新的理論方法,改善現有方 法的缺失,並對於 FEMET 與 CTMIE 做數值模擬上的比較,最後發 現這樣的理論具其物理意義與實用性,以利在設計 MMI 之前,做快 速且精準的模擬分析。. 2.
(9) 1. 2 多模干涉器的近似理論 nc. Bar nr. WM. Input. Cross. L 2 × 2 MMI 結構圖. 圖 1.2-1. MMI 的近似理論[2]建立在兩個近似條件下,第一個近似條件是在 high-contrast 的波導,在這樣的波導裡,若 core 的折射率 nr 大於 cladding 的折射率 nc 很多,則每個模態的有效寬度均可近似於結構寬 度,即 Wev WM 。在通常的情況,每個模態的有效寬度僅近似成第一 個模態的有效寬度[3],. Wev. ⎛ λ ⎞⎛ n ⎞ We 0 = WM + ⎜ 0 ⎟ ⎜ c ⎟ ⎝ π ⎠ ⎝ nr ⎠. 2σ. (n. 2 r. − nc2 ). −. 1 2. (1.2-1). 在 TE 極化時,σ = 0 ,而在 TM 極化時,σ = 1 。則 lateral wavenumber qv 與 propagation constant β v 的關係式可表示成如下, qv2 + β v2 = k02 nr2. 其中 k0 =. 2π. λ. ,qv =. ( v + 1) π We 0. (1.2-2). 利用式(1-1)、(1-2)與泰勒近似展開來決定傳播常數, βv. 2 ν + 1) πλ0 ( k0 nr − , 2. 4nrWe 0. v = 0,1, 2,. 3. , m −1. (1.2-3).
(10) 接著定義 beat length Lπ ,由最低階的兩個 β 來決定, Lπ. π β 0 − β1. 4nrWe20 3λ0. (1.2-4). 則每個模態的 spacing 可表示成 β0 − βv. v ( v + 2)π 3Lπ. (1.2-5) m −1. 而場的分佈型式可由 superposition 表示成 Ψ ( x, z ) = ∑ cvφv ( x)e j (ωt − β z ) ,將 v. v =0. fundamental mode 當做為 Ψ ( x, z ) 的一個共同項,並假設與時間 t 無關, 則場量的分佈型式表示成 m −1. Ψ ( x, z ) = ∑ cvφv ( x)e. j ( β0 − βv ) z. (1.2-6). v =0. 將式(1-4)代入上式,在 z = L 位置時,則場量分佈為 m −1. Ψ ( x, L) = ∑ cvφv ( x)e. j. v ( v + 2 )π 3 Lπ. L. (1.2-7). v =0. 從上式可看出, cv 是每個模態的 excitation coefficient, φv ( x) 是 x 方向 的 eigenfunction, e. j. v ( v + 2 )π 3 Lπ. L. 是每個模態的 phase。亦可從上式,推論出. 對稱條件, ⎧⎪φ ( x) φv (− x) = ⎨ v ⎪⎩−φv ( x). for v even. (1.2-8). for v odd. 式(1.2-8)條件,對稱於 x = 0 的平面。. 4.
(11) x. x=0. z. 1 ( 3Lπ ) 2. z=0. ( 3Lπ ). 圖 1.2-2. 2 ( 3Lπ ). 3 ( 3Lπ ) 2. self-imaging 鏡像位置. (1) Single Images 為了使 Ψ ( x, z = L) = Ψ ( x, z = 0) ,以達到 self-imaging 效應,我們假設 L = p ( 3Lπ ), p = 0,1, 2. (1.2-9). p 為 self-imaging 的週期,將傳播距離代入式(1.2-7)的相位中, j. e. v ( v + 2 )π 3 Lπ. L. ⎧⎪1 =⎨ v ⎪⎩( −1). for p even. (1.2-10). for p odd. 發現,當 p 為偶數時,其相位等於 1,使得式(1.2-7)場量分佈與 m −1. Ψ ( x, 0) 相同,即 Ψ ( x, p3Lπ ) = Ψ ( x, 0) = ∑ cvφv ( x) ,且相位與 Ψ ( x, 0) 相位 v =0. 相同,稱為 direct image,如圖 1.2-2 中 z = 2 ( 3Lπ ) 的位置所示。若 當 p 為奇數時,則相位會根據 odd mode 或 even mode 而改變,根 據式(1.2-8)的對稱條件,使得式(1.2-7)場量大小分佈與 Ψ ( x, 0) 相 m −1. 同,但相位與 Ψ ( x, 0) 相位反相,即 Ψ ( x, p3Lπ ) = ∑ cvφv (− x),稱為 mirror v =0. 5.
(12) image,如圖 1.2-2 中 z = 3Lπ 的位置所示。 (2) Multiple Images Self-imaging 效應除了可形成單一個的鏡像,也能形成一對或是多 個鏡像。假設 L=. p ( 3Lπ ), p = 1,3,5 2. (1.2-11). 則式(1.2-7)可寫成, Ψ ( x,. p v 3Lπ ) = ∑ 1⋅ cvφv ( x) + ∑ ( − j ) ⋅ cvφv ( x) 2 v even v odd 1+ (− j ) 1− (− j ) = Ψ ( x, 0) + Ψ (− x, 0) 2 2 p. p. (1.2-12). 在本小節最後有式(1.2-12)的詳細推導。由上式可發現是為一對 Ψ ( x, 0) 的鏡像,而強度均為. 1 1 3 ,如圖 1.2-2 中 z = ( 3Lπ ) 及 z = ( 3Lπ ) 2 2 2. 的位置所示。若將 Ψ ( x, 0) 展開成週期性 Fourier 展開式 Ψ in ( x) , Ψ in ( x). ∞. ∑ [ Ψ ( x − u 2W. u =−∞. e0. , 0) − Ψ (− x + u 2We 0 , 0) ]. (1.2-13). 假設 L=. p ( 3Lπ ) N. (1.2-14). 當 p ≥ 0 及 N ≥ 1,且 p 、 N 沒有相同的公因數時,則根據[4]的操作, 式(1.2-7)可改寫成一個空間的 Fourier 展開式,. 6.
(13) W ⎧ xq = p ( 2q − N ) e 0 ⎪ 1 ⎪ jϕ N Ψ ( x, L) = ∑ Ψ in ( x − xq )e q , 其中 ⎨ C q =0 ⎪ϕ = p ( N − q ) qπ ⎪⎩ q N N −1. (1.2-15). C 為歸一化常數, C = N 。從上式中,可發現在傳播至 L 的距離. 時,會產生 N 個與 Ψ in ( x) 相同的鏡像,其鏡像位置在 xq 上,每個鏡 像的強度為. +. We 0 3. −. We 0 3. 1 ,相位各為 ϕq 。 N. We 0. v = 0. 1. 2. 圖 1.2-3. 4. 3. 5. 6. 7. 8. 前九個模態剖面圖. 上面所述之 MMI self-imaging 機制,與激發係數 cv 無關,且不需 考慮入射位置,支援所有的模態,稱為 General Interference。接下來 說明另一種 self-imaging 機制,與激發係數 cv 有關,且需要考慮入射 位置,支援的模態有所選擇,稱為 Restricted Interference。 (1) Paired Interference 式(1.2-7)中的相位,如果欲使 v(v + 2) 是為 3 的倍數時,則模態數的 情況為 v ≠ 2,5,8 才可滿足,由圖 1.2-3 所示,若將輸入波導置放在 7.
(14) x=±. We 0 的位置時,則發現 v = 2,5,8 3. 的模態將不會被激發,即. cv = 0, for v = 2,5,8. (1.2-16). 以式(1.2-16)做為條件,假設 L = p ( Lπ ) , p = 0,1, 2. (1.2-17). 可發現式(1.2-7)僅會支援 0,1 、 3, 4 、 6, 7 …的模態。相同的, N 個 鏡像的距離為 L=. p ( Lπ ) N. (1.2-18). 其中 p ≥ 0 及 N ≥ 1 ,且 p 、 N 沒有相同的公因數。 (2) Symmetric Interference 式(1.2-7)中的相位,如果欲使 v(v + 2) 是為 4 的倍數時,則模態數的 情況為 v ≠ 1,3,5 才可滿足,由圖 1.2-3 所示,若將輸入波導置放在 x = 0 的位置時,則發現 v = 1,3,5. 的模態將不會被激發,即. cv = 0, for v = 1,3,5. (1.2-19). 以式(1.2-19)做為條件,假設 ⎛ 3L L = p⎜ π ⎝ 4. ⎞ ⎟ , p = 0,1, 2 ⎠. (1.2-20). 可發現式(1.2-7)僅會支援偶模態,odd mode 完全不會被激發出 來。相同的, N 個鏡像的距離為 L=. p ⎛ 3Lπ ⎞ ⎜ ⎟ N⎝ 4 ⎠. (1.2-21) 8.
(15) 其中 p ≥ 0 及 N ≥ 1 ,且 p 、 N 沒有相同的公因數,且輸出鏡像位置 分佈在. We 0 。 N. 估計出傳播距離後,我們可以利用 Tolerances 公式[5],由輸入波 導的寬度來決定其傳播距離可允許的範圍。 δL. π nrω 2 4λ0. (1.2-22). ω 為輸入波導的寬度。. 9.
(16) 1+ (− j ) 1− (− j ) Ψ ( x, 0) + Ψ (− x, 0) 式(1.2-12)推導 2 2 p. p 2. ● Ψ ( x, 3Lπ ) =. ∑ 1⋅ c φ ( x) + ∑ ( − j ). v. v v. v even. ⇒. p. ⋅ cvφv ( x). v odd. 1. ⎛. 1. 1. ⎞. 1. ∑ 2 ⋅ c φ ( x) + ∑ 2 ⋅ c φ ( x) + ⎜ ∑ 2 ⋅ c φ ( x) − ∑ 2 ⋅ c φ ( x) ⎟ + v v. v even. ∑. v v. ⎝ v odd. v even. (− j). v odd. v. 2. ⋅ cvφv ( x) + ∑. (− j). v v. ⎠. v odd. v ⎛ ⎞ − j) − j) ( ( ⋅ cvφv ( x) + ⎜ ∑ ⋅ cvφv ( x) − ∑ ⋅ cvφv ( x) ⎟ ⎜ v even 2 ⎟ 2 v oven ⎝ ⎠. v. v. 2. v odd. v v. 由式(1.2-8)對稱條件修正,. ∑ 1 ⋅ c φ ( x) + ∑ ( − j ). v. v v. v even. ⇒. ⋅ cvφv ( x). v odd. 1. 1. 1. v v. v even. ∑. v odd. v v. v v. v even. (− j). v. 2. 1+ (− j) ⇒ 2. ⋅ cvφv ( x) − ∑. v odd. v. (− j). v odd. v. 2. ⋅ cvφv (− x) +. 1− (− j ) ∑v cvφv ( x) + 2. ∑. v even. v. v. ∑. v (e + o). ∑ c φ (− x) v v. v. 1+ (− j) 1− (− j ) Ψ ( x, 0) + Ψ (− x, 0) 2 2 p. v v. v odd. (− j) 1 1 ⇒ ∑ cvφv ( x) + ∑ cvφv (− x) + 2 v (e + o) 2 v (e + o) 2. ⇒. 1. ∑ 2 ⋅ c φ ( x ) + ∑ 2 ⋅ c φ (− x ) + ∑ 2 ⋅ c φ ( x ) + ∑ 2 ⋅ c φ (− x ) +. p. 10. (− j) 2. v. ⋅ cvφv ( x) −. (− j ) c φ ( x) − v v. ∑. v oven. 2. v. ∑. v (e + o). (− j) 2. v. ⋅ cvφv (− x). cvφv (− x).
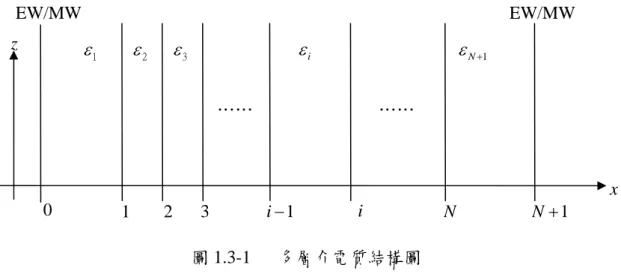
(17) 1. 3 ABCD matrix 模態解 EW/MW. EW/MW. ε1. z. ε2. εi. ε3. ε N +1. ……. ……. x 0. 1. i −1. 3. 2. 圖 1.3-1. i. N. N +1. 多層介電質結構圖. 如圖 1.3-1 的多層介電質結構,假設每一區的介電質係數 ε 均不 相同,且在最外層邊界加上電牆(E Wall)或磁牆(M Wall)[6],則其場量 的型式為 m. Ψ ( x, z ) = ∑ c φ ( x )e (i ). (i ) (i ) n n. n =1. − j βn z. ⎧⎪ E y(i ) TE case , Ψ ( x, z ) = ⎨ ( i ) ⎪⎩ H y TM case. (1.3-1). 而 φn(i ) 可表示成一個往右的分量與一個往左的分量的總合,如圖 1.3-2 所示, a 表示往右, b 表示往左, φn(i ) ( x) = an(i ) e− jq. (i ) n ( x − xi −1 ). 其中 q. (i ) n. + bn( i ) e+ jqn. (i ). ( x − xi ). ,. ⎧ k 2 n 2 − β 2 where k n > β n n 0 i ⎪ 0 i =⎨ ⎪⎩− j β n2 − k02 ni2 where β n > k0 ni. (1.3-2). 將 φn(i ) 改成利用正弦函數的形式來描述,並將其歸一化 φ. (i ) n. sin qn(i ) ( x − xi −1 ) (i ) sin qn( i ) ( xi − x) ,i = 2 ~ N =a + bn sin qn(i ) di sin qn(i ) di (i ) n. 11. (1.3-3).
(18) i th region. an(i ). bn( i ) di. xi −1 圖 1.3-2. xi. an(i ) : xi 界面上的場值, bn( i ) : xi −1 界面上的場值. 上式定義的 φn(i ) 所描述為 i = 2 ~ N 的區域,第 1 區及第 N + 1 區的定義需 配合邊界條件來決定, 第一區: ⎧ sin qn(1) ( x − x0 ) ⎪ sin qn(1) d1 (1) (1) ⎪ φn ( x) = bn ⎨ (1) ⎪ cos qn ( x − x0 ) ⎪⎩ cos qn(1) d1. on. TE/EW, or TM/MW. (1.3-4) on. TM/EW, or TE/MW. 第 N + 1 區: ⎧ sin (nN +1) ( xN +1 − x) at TE/EW, or TM/MW ⎪ sin qn( N +1) d N +1 ( N +1) ( N +1) ⎪ φn ( x) = an ⎨ ( N +1) ⎪ cos qn ( xN +1 − x) at TM/EW, or TE/MW ⎪⎩ cos qn( N +1) d N +1. (1.3-5). 式(1.3-3) ~ (1.3-5)分別定義各個區域的 TM mode- H y 或 TE mode- E y , 利用 Maxwell equation 可進而推導出 TM mode- Ez 或 TE mode- H z 。 ⎧ 1 ∂H y 1 ∂H y , −Ez = j ⎪TM Mode: Ex = j ωε ∂z ωε ∂x ⎪ ⎨ ⎪TE Mode: H = − j 1 ∂E y , − H = j 1 ∂E y x z ⎪⎩ ωμ ∂z ωμ ∂x. 12. (1.3-6).
(19) 我們將第 i 個界面上的場與其切面場,用式(1.3-7)來描敘, ⎧ ⎡ un( i ) ⎤ ⎡ E y(i ) ( xi ) ⎤ ⎡ E y(i +1) ( xi ) ⎤ ⎪ ⎢ (i ) ⎥ = ⎢ (i ) ⎥ = ⎢ (i +1) ⎥ on TE case jv H ( x ) H ( x ) i ⎦ ⎪⎣ n ⎦ ⎣ z i ⎦ ⎣ z ⎨ (i ) (i ) ( i +1) ⎪ ⎡ un ⎤ ⎡ H y ( xi ) ⎤ ⎡ H y ( xi ) ⎤ ⎪ ⎢ jv (i ) ⎥ = ⎢ − E (i ) ( x ) ⎥ = ⎢ − E (i +1) ( x ) ⎥ on TM case i ⎦ ⎩⎣ n ⎦ ⎣ z i ⎦ ⎣ z. (1.3-7). 在 vn 前加虛數 j ,目的是為了消除由 ABCD matrix 內的元素所定義的 虛數 j 。 藉由此新定義,第 i 個界面的場值可利用 ABCD matrix 表示成第 1 個界面場值或第 N 個界面場值的關係,並定義新的 ABCD 元素, 如下列推導, ⎡un(i ) ⎤ ⎡ An(i +1) ⎢ (i ) ⎥ = ⎢ (i +1) ⎢⎣ jvn ⎥⎦ ⎣Cn. Bn( i +1) ⎤ ⎥ Dn(i +1) ⎦. (i ) ⎡1 0 ⎤ ⎡un ⎤ ⎡ An(i +1) ⇒⎢ ⎥ ⎢ (i ) ⎥ = ⎢ (i +1) ⎣0 j ⎦ ⎣⎢vn ⎥⎦ ⎣Cn. ⎡ An( N ) ⎢ (N ) ⎣ Cn Bn(i +1) ⎤ ⎥ Dn(i +1) ⎦. Bn( N ) ⎤ ⎡un ⎤ ⎥ ⎥⎢ Dn( N ) ⎦ ⎢⎣ jvn( N ) ⎥⎦ (N ). (N ) Bn( N ) ⎤ ⎡1 0 ⎤ ⎡un ⎤ ⎥ ⎥⎢ ⎥⎢ Dn( N ) ⎦ ⎣ 0 j ⎦ ⎣⎢ jvn( N ) ⎦⎥. ⎡ An( N ) ⎢ (N ) ⎣ Cn. (i ) ⎡1 0 ⎤ ⎡1 0 ⎤ ⎡un ⎤ ⎡1 0 ⎤ ⎡ An(i +1) ⇒⎢ ⎥⎢ ⎥ ⎢ (i ) ⎥ = ⎢ ⎥ ⎢ (i +1) ⎣0 − j ⎦ ⎣0 j ⎦ ⎢⎣vn ⎥⎦ ⎣ 0 − j ⎦ ⎣Cn. ⎡un(i ) ⎤ ⎡1 0 ⎤ ⎡ An(i +1) ⇒ ⎢ (i ) ⎥ = ⎢ ⎥ ⎢ (i +1) ⎢⎣vn ⎥⎦ ⎣ 0 − j ⎦ ⎣Cn ⎡un(i ) ⎤ ⎡ An(i +1) ⇒ ⎢ (i ) ⎥ = ⎢ ( i +1) ⎣⎢vn ⎦⎥ ⎣ − jCn ⎡un(i ) ⎤ ⎡ An( i +1)′ ⇒ ⎢ (i ) ⎥ = ⎢ ⎣⎢vn ⎦⎥ ⎢⎣Cn( i +1)′. Bn(i +1) ⎤ ⎡1 0 ⎤ ⎡1 0 ⎤ ⎥⎢ ⎥⎢ ⎥ Dn(i +1) ⎦ ⎣ 0 j ⎦ ⎣0 − j ⎦. jBn(i +1) ⎤ ⎥ Dn( i +1) ⎦ Bn(i +1)′ ⎤ ⎥ Dn( i +1)′ ⎥⎦. Bn( i +1) ⎤ ⎥ Dn(i +1) ⎦. ⎡ An( N ) ⎢ (N ) ⎣ − jCn ⎡ A( N )′ ⎢ n ⎢⎣Cn( N )′. ⎡ An( N ) ⎢ (N ) ⎣ Cn. (N ) Bn( N ) ⎤ ⎡1 0 ⎤ ⎡un ⎤ ⎥ ⎥⎢ ⎥⎢ Dn( N ) ⎦ ⎣ 0 j ⎦ ⎢⎣ jvn( N ) ⎥⎦. ⎡1 0 ⎤ ⎡1 0 ⎤ ⎡ An( N ) ⎢0 j ⎥ ⎢0 − j ⎥ ⎢ ( N ) ⎣ ⎦⎣ ⎦ ⎣ Cn. (N ) Bn( N ) ⎤ ⎡1 0 ⎤ ⎡un ⎤ ⎥ ⎥⎢ ⎥⎢ Dn( N ) ⎦ ⎣ 0 j ⎦ ⎢⎣ jvn( N ) ⎥⎦. jBn( N ) ⎤ ⎡un ⎤ ⎥ ⎥⎢ Dn( N ) ⎦ ⎣⎢ jvn( N ) ⎦⎥ (N ). Bn( N )′ ⎤ ⎡un( N ) ⎤ ⎥⎢ ⎥ (N ) Dn( N )′ ⎥⎦ ⎣⎢ jvn ⎦⎥ ⎡ Ai′ Bi′ ⎤ ⎥ ,其內部 ′ ′ C D i i ⎣ ⎦. 由上述推導可發現,新定義的 ABCD matrix,即為 ⎢. 的 ABCD 元素,A、D 元素與舊定義的相同,B、C 元素則需修正。. 13.
(20) TE mode. 舊定義:. TM mode. An(i ) = Dn(i ) = cos qn(i ) di. An(i ) = Dn(i ) = cos qn(i ) di. Bn(i ) = jZ n( i ) sin qn(i ) di. Bn(i ) = jGi sin qn( i ) di. j sin qn(i ) di Z n(i ). Cn(i ) = Z n(i ) =. ωμi. Gn(i ) =. (i ) n. q. TE mode. 新定義:. j sin qn( i ) di Gn(i ). Cn(i ) =. ωε i qn(i ). TM mode. An(i )′ = Dn(i )′ = cos qn(i ) di. An(i )′ = Dn(i )′ = cos qn(i ) di. Bn(i )′ = − Z n(i ) sin qn(i ) di. Bn(i )′ = −Gn(i ) sin qn(i ) d i. sin qn( i ) di Z n(i ). Cn(i )′ = Z n(i ) =. sin qn( i ) di Gn(i ). Cn(i )′ =. ωμi. Gn( i ) =. (i ) n. q. ωε i qn( i ). 新定義中的 Bn(i )′ 、 Cn(i )′ 元素,已無虛部部份,目的在於計算時,數值 均是實數,可方便電腦運算。 引用在界面上場值相等的觀念,由多層結構的第 1 個及第 N 個界 面上場值,經由新式 ABCD matrix 推展至第 i 個界面, 由左拉至右, ⎡un(i ) ⎤ ⎡ An(i )′ ⎢ (i ) ⎥ = ⎢ ⎢⎣ vn ⎥⎦ ⎢⎣Cn(i )′ ⎡ D ( i )′ =⎢ n ⎢⎣ −Cn( i )′. Bn( i )′ ⎤ ⎥ ( i )′ ⎥ Dn ⎦. −1. ⎡ A(i −1)′ ⎢ n ⎢⎣Cn(i −1)′. Bn( i −1)′ ⎤ ⎥ ( i −1)′ ⎥ Dn ⎦. −1. − Bn(i )′ ⎤ ⎡ Dn(i −1)′ ⎥⎢ An(i )′ ⎥⎦ ⎢⎣ −Cn(i −1)′. − Bn(i −1)′ ⎤ ⎥ An(i −1)′ ⎥⎦. Bn(i +1)′ ⎤ ⎡ An(i + 2)′ ⎥⎢ ( i +1)′ ⎥ ⎢ ( i + 2)′ Dn ⎦ ⎣Cn. Bn( i + 2)′ ⎤ ⎥ ( i + 2)′ ⎥ Dn ⎦. ⎡ A(2)′ ⎢ n ⎢⎣Cn(2)′ ⎡ D (2)′ ⎢ n ⎢⎣ −Cn(2)′. Bn(2)′ ⎤ ⎥ (2)′ ⎥ Dn ⎦. −1. ⎡un(1) ⎤ ⎢ (1) ⎥ ⎢⎣ vn ⎥⎦. − Bn(2)′ ⎤ ⎡un(1) ⎤ ⎥⎢ ⎥ (1) An(2)′ ⎥⎦ ⎣⎢vn ⎦⎥. 由右拉至左, ⎡un(i ) ⎤ ⎡ An(i +1)′ ⎢ (i ) ⎥ = ⎢ ⎢⎣ vn ⎥⎦ ⎣⎢Cn(i +1)′. 14. ⎡ A( N )′ ⎢ n (N ) ⎣⎢Cn ′. Bn( N )′ ⎤ ⎡un( N ) ⎤ ⎥⎢ ⎥ ( N )′ ⎥ v ( N ) Dn ⎦ ⎢⎣ n ⎥⎦.
(21) ⎧ ⎡ D ( i )′ ⎪⎢ n ⎪ ⎢ −C ( i )′ n 令 ⎪⎨ ⎣ ⎪ ⎡ An(i +1)′ ⎪⎢ ⎪⎩ ⎢⎣Cn(i +1)′. − Bn( i )′ ⎤ ⎡ Dn(i −1)′ − Bn(i −1)′ ⎤ ⎥⎢ ⎥ An(i )′ ⎥⎦ ⎢⎣ −Cn(i −1)′ An(i −1)′ ⎥⎦ Bn(i +1)′ ⎤ ⎡ An( i + 2)′ Bn(i + 2)′ ⎤ ⎥⎢ ⎥ Dn(i +1)′ ⎥⎦ ⎢⎣Cn(i + 2)′ Dn(i + 2)′ ⎥⎦. ⎡ D (2)′ ⎢ n ⎢⎣ −Cn(2)′ ⎡ A( N )′ ⎢ n ⎢⎣Cn( N )′. − Bn(2)′ ⎤ ⎡ AL BL ⎤ ⎥=⎢ ⎥=L An(2)′ ⎥⎦ ⎣CL DL ⎦ Bn( N )′ ⎤ ⎡ AR BR ⎤ ⎥=⎢ ⎥=R Dn( N )′ ⎥⎦ ⎣CR DR ⎦ ⎡un(1) ⎤ ⎡un( N ) ⎤ ⎥、⎢ (N ) ⎥ , (1) ⎢⎣ vn ⎥⎦ ⎢⎣ vn ⎥⎦. 而在不同的邊界條件時 TE/TM - EW/MW ,有不同的 ⎢. 應用阻抗的想法,設定 u = 1 , v 定義成阻抗的意義,則可化簡型式為 ⎧ ⎡un(1) ⎤ ⎡ 1 ⎤ (1) ⎪ ⎢ (1) ⎥ = ⎢ (1) ⎥ bn ⎪ ⎢⎣vn ⎥⎦ ⎣ S n ⎦ ⎨ (N ) ⎪ ⎡un ⎤ ⎡ 1 ⎤ ( N +1) ⎪ ⎢ ( N ) ⎥ = ⎢ S ( N +1) ⎥ an ⎩ ⎣⎢vn ⎦⎥ ⎣ n ⎦. (1.3-8). S n(1) 與 S n( N +1) 表示如下. S n(1). ⎧ qn(1) cot qn(1) d1 for TE/EW or TM/MW ⎪ ω p ⎧ε on TM ⎪ 1 ,其中 p1 = ⎨ 1 = ⎨ (1) ⎩ μ1 on TE ⎪ − qn tan q (1) d for TE/MW or TM/EW n 1 ⎪⎩ ω p1. S n( N +1). ⎧ − qn( N +1) cot qn( N +1) d N +1 for TE/EW or TM/MW ⎪ on TM ⎧ε ⎪ ω pN +1 ,其中 pN +1 = ⎨ N +1 = ⎨ ( N +1) ⎩ μ N +1 on TE ⎪ qn tan qn( N +1) d N +1 for TE/MW or TM/EW ⎪⎩ ω pN +1. (1.3-9). 15.
(22) 拉至第 i 個界面上場值相等 ⎡un(1) ⎤ ⎡un( N ) ⎤ L ⎢ (1) ⎥ = R ⎢ ( N ) ⎥ ⎢⎣vn ⎥⎦ ⎢⎣vn ⎥⎦ ⎡A ⇒⎢ L ⎣C L. BL ⎤ ⎡un(1) ⎤ ⎡ AR ⎢ ⎥= DL ⎥⎦ ⎣⎢vn(1) ⎦⎥ ⎢⎣CR. BR ⎤ ⎡un( N ) ⎤ ⎢ ⎥ DR ⎥⎦ ⎣⎢vn( N ) ⎦⎥. ⎡A ⇒⎢ L ⎣C L. BL ⎤ ⎡ 1 ⎤ (1) ⎡ AR bn = ⎢ DL ⎥⎦ ⎢⎣ S n(1) ⎥⎦ ⎣C R. BR ⎤ ⎡ 1 ⎤ ( N +1) an DR ⎥⎦ ⎢⎣ Sn( N +1) ⎥⎦. ⎡ AL + BL ⋅ Sn(1) ⎤ (1) ⎡ AR + BR ⋅ Sn( N +1) ⎤ ( N +1) b =⎢ a ⇒⎢ (1) ⎥ n ( N +1) ⎥ n ⎣CR + DR ⋅ S n ⎦ ⎣CL + DL ⋅ Sn ⎦ ⎡ AR + BR ⋅ Sn( N +1) ⇒⎢ ⎢CR + DR ⋅ S n( N +1) ⎣. − ( AL + BL ⋅ Sn(1) ) ⎤ ⎡ aN +1 ⎤ ⎡0 ⎤ ⎥ ⎢ (1) ⎥ = ⎢ ⎥ (1) − ( CL + DL ⋅ S n ) ⎥⎦ ⎣ bn ⎦ ⎣0 ⎦. 最後形成一個非線性特徵值問題,欲求解 β ,需先得知 q 值,而此矩 陣內僅包含未知數 q ,因此我們針對 q 做撒根,解行列式等於零, det ⎡⎣( CR + DR ⋅ Z N +1 )( AL + BL ⋅ Z1 ) − ( AR + BR ⋅ Z N +1 )( CL + DL ⋅ Z1 ) ⎤⎦ = 0. (1.3-10) 即可找到正確的 q ,進而求出模態 β 。. 16.
(23) 第二章 FEMET 理論分析 MMI 2. 1 FEMET 理論基本觀念 在設計 MMI 時,必須考慮在干涉區裡的能量集中在界面上的位 置,若設計錯誤將能量集中在不連續介質的界面上,勢必造成能量的 反射,所以設計時已經確定能量將由入射波導打入後,經過 MMI 的 相互干涉作用,能量能夠相當地集中在連續介質界面的輸出波導中, 因此在整體結構上僅考慮能量傳遞,而不考慮在結構界面上的反射, 相同的在干涉區內也是只考慮場量的傳遞而不需要考慮反射。 而 全 特 徵 模 態 展 開 法 (full eigen-mode expansion technique, FEMET),便是不考慮反射情況下所發展出來的近似理論,本節先僅 對 2 × 2 MMI 簡單對稱結構做基本觀念的介紹,如圖 2.1-1 所示之簡單 MMI 結構,第 1 區為輸入波導區,第 2 區為干涉波導區,第 3 區為 輸出波導區。 (1). (2). z0. (3). z1 圖 2-1. 2 × 2 MMI 結構圖 17.
(24) 首先定義每一區的場量分佈型式 U (1) ( x, z ) 、 U (2) ( x, z ) 、 U (3) ( x, z ) , 利 用 在 界 面 相 鄰 兩 區 場 值 連 續 的 觀 念 U (1) ( x, z = z0 ) = U (2) ( x, z = z0 ) 、 U (2) ( x, z = z1 ) = U (3) ( x, z = z1 ) ,可分別推導出第 1 區轉換到第 2 區及第 2 → (3) 區轉換到第 3 區的模態轉換係數 Ti ,(1)j →(2)、T j(2) ,經由轉換係數 Ti ,(1)j →(2) 、 ,k. → (3) 即知道 U (1) ( x, z ) 、 U (2) ( x, z ) 、 U (3) ( x, z ) 的完整形式,便可分析出 T j(2) ,k. MMI 的場形。 本節已概略描述簡單對稱結構 MMI 之 FEMET 理論的基本觀 念,下一節將以 TE 極化入射,針對特殊結構 MMI 做 FEMET 理論 架構詳盡的說明。. 18.
(25) 2. 2 TE 入射 FEMET 理論架構與推導 (1). (m). (N+1). n1. n2. z1. zm −1. zN. zm. 2 × 2 特殊結構 MMI 分區示意圖. 圖 2.2-1. (1). n2. (2). z1. (m). zm −1 圖 2.2-2. (N). zm. (N+1). zN. 階梯近似示意圖. 寬度為斜邊的 MMI 結構,無法計算其干涉區的模態,因此必需 在干涉區上利用切割分區的方法做階梯近似,如圖 2.2-1 所示,近似 後如圖 2.2-2 所示。由圖可看出在第 1 區、第 N+1 區有五層,而在其 它的區域只有三層,且此結構為上下對稱,因此可利用對稱性簡化問 題,如圖 2.2-3 所示。. 19.
(26) x. EW/MW. (1). (2). (m). (N). (N+1). Δz1. Δzm −1. Δz N −1. EW/MW z1. zm −1 圖 2.2-3. z. zN. zm. 對稱性簡化結構. 在結構上下邊界導入 electric wall(EW)、magnetic wall(MW)的觀 念,一方面簡化問題,另一方面可將連續的空間頻率離散化,可進而 定義出分別在 MMI 內部及外部的 x 方向歸一化基底函數的形式, φn( m ) ( x) , m = 1 ~ N + 1,在 1-3 節有詳盡的說明。接著分別定義第 1 ~ N + 1. 區的 TE 極化場量形式, 第 1 區:假設為最初的單一模態入射形式, E (1) ( x, z ) = ∑ ai(1)φi(1) ( x)e − j βi. (1). z. = a1(1)φ1(1) ( x)e − j β1. (1). z. (2.2-1). i. 第 m 區,m=2 ~ N:形成干涉多模態形式, E ( m ) ( x, z ) = ∑ a (jm )φ (j m ) ( x)e. − j β (j m ) ( z − zm−1 ). (2.2-2). j. 第 N+1 區:能量穿透形式, E ( N +1) ( x, z ) = ∑ a (pN +1)φ p( N +1) ( x)e. − j β p( N +1) ( z − z N ). p. 20. (2.2-3).
(27) FEMET 理論在界面上僅做場量連續的探討,省略了切線場量連 續的部份,以 TE 極化入射分析,在界面上僅做電場連續即可, 第 1 界面: E (1) ( x, z1 ) = E (2) ( x, z1 ) ⎧ E (1) ( x, z1 ) = a1(1)φ1(1) ( x)e − j β1 ⎪ ⎨ (2) (2) (2) ⎪ E ( x, z1 ) = ∑ a j φ j ( x) j ⎩. (1). z1. ⇒ a1(1)φ1(1) ( x)e − j β1. (1). z1. (2) = ∑ a (2) j φ j ( x) j. 透過 Fourier series 可推得係數,. a. (2) j. (1) (1) − j β1 z1 1. =a e. φ1(1) ( x) φ j(2) ( x) *. (2.2-4). φ j(2) ( x) φ (2) j ( x) *. 一般的情況會將 z1 定位在 z = 0 的位置上,所以式(2.2-4)可改寫成,. a. (2) j. =a. (1) 1. φ1(1) ( x) φ (2) j ( x) *. (2.2-5). (2) φ (2) j ( x) φ j ( x) *. 這裡使用了正交函數的內積特性, ⎧1 for j = j ′ ⎩0 for j ≠ j ′. (2) (2) (2) φ (2) j ( x ) φ j ′ ( x ) * ≡ ∫ φ j ( x )φ j ′ ( x ) * dx = ⎨. (2.2-6). 式(2.2-5)可改寫成 a (2) = T1,(1)j →(2) ⋅ a1(1) , j. 其中 T1,(1)j →(2) ≡ ∫ φ1(1) ( x)φ j(2) ( x) * dx. (2.2-7). 同理,在其他的界面上做電場連續,亦可推導出各區之間的模態轉換 係數 T j(,mk )→( m+1) ,. 21.
(28) 第 m 界面,m=2 ~ N-1: E ( m ) ( x, zm ) = E ( m+1) ( x, zm ) ⎧ (m) − j β (j m ) Δzm−1 (m) (m) ⎪ E ( x, z m ) = ∑ a j φ j ( x )e ⎪ j ⎨ ⎪ E ( m +1) ( x, z ) = a ( m +1)φ ( m +1) ( x) ∑k k k m ⎪⎩ ⇒. ∑a. φ (j m ) ( x)e. (m) j. − j β (j m ) Δzm−1. j. = ∑ ak( m +1)φk( m +1) ( x) k. ak( m +1) = T j(,mk )→( m +1) ⋅ ∑ a (jm ) e. − j β (j m ) Δzm−1. ,. j. 其中 T j(,mk )→( m+1) ≡ ∫ φ (j m ) ( x)φk( m+1) ( x) * dx. (2.2-8). 第 N 界面: E ( N ) ( x, z N ) = E ( N +1) ( x, z N ) ⎧ (N ) − j β o( N ) Δz N −1 (N ) (N ) ⎪ E ( x, z N ) = ∑ ao φo ( x)e ⎪ o ⎨ ⎪ E ( N +1) ( x, z ) = ∑ a ( N +1)φ ( N +1) ( x) N p p ⎪⎩ p ⇒. ∑a. φ. (N ) (N ) o o. ( x )e − j β o. (N). o. Δz N −1. = ∑ a (pN +1)φ p( N +1) ( x) p. a (pN +1) = To(,Np )→( N +1) ⋅ ∑ ao( N ) e − jβo. (N ). Δz N −1. ,. o. 其中 To(,Np )→( N +1) ≡ ∫ φo( N ) ( x)φ p( N +1) ( x) * dx. 22. (2.2-9).
(29) 2. 3 數值模擬結果 我們採用 2 × 2 的 MMI 元件,並針對簡單結構及特殊結構的 MMI 來做模擬分析,FEMET 由於不考慮反射,所以針對穿透係數部份做 個探討,並繪製能量圖形,而這些結構的元件參數均已設定[5],特殊 結構之斜率公式[6]為, ⎛ z ⎞ Wtaper ( z ) = WN + (WM − WN ) ⋅ ⎜1 − 2 ⎟ LN ⎠ ⎝. 2. (2.3-1). WM 為 MMI 斜邊的最大寬度,WN 為 MMI 斜邊的最小寬度, LN 是指斜. 邊結構的長度。而其元件的共同參數如下表所示, 元件參數定義. 設定值. 入射波長. 1.55μ m. Core 折射率. 3.214735. Cladding 折射率. 2.3. 輸入輸出波導折射率. 3.214735. 輸入輸出波導外部折射率. 2.95. 輸入輸出波導間距. 2.8μ m. 輸入輸出波導寬度. 2.2μ m. MMI 寬度. 10μ m. 模態數. 200. 表 2.3-1. 元件共同參數. 23.
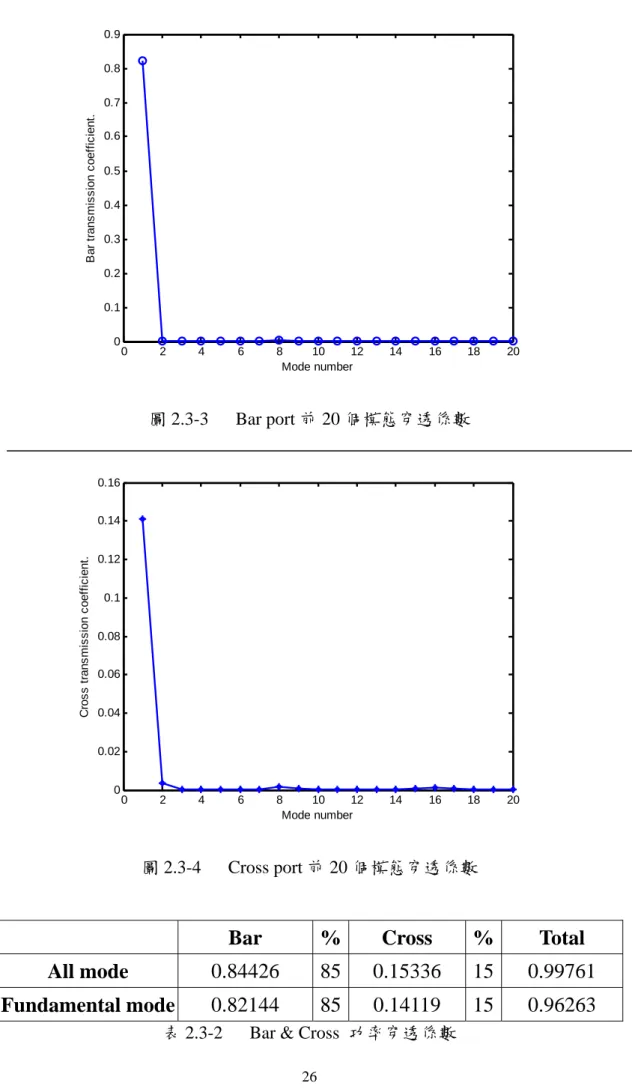
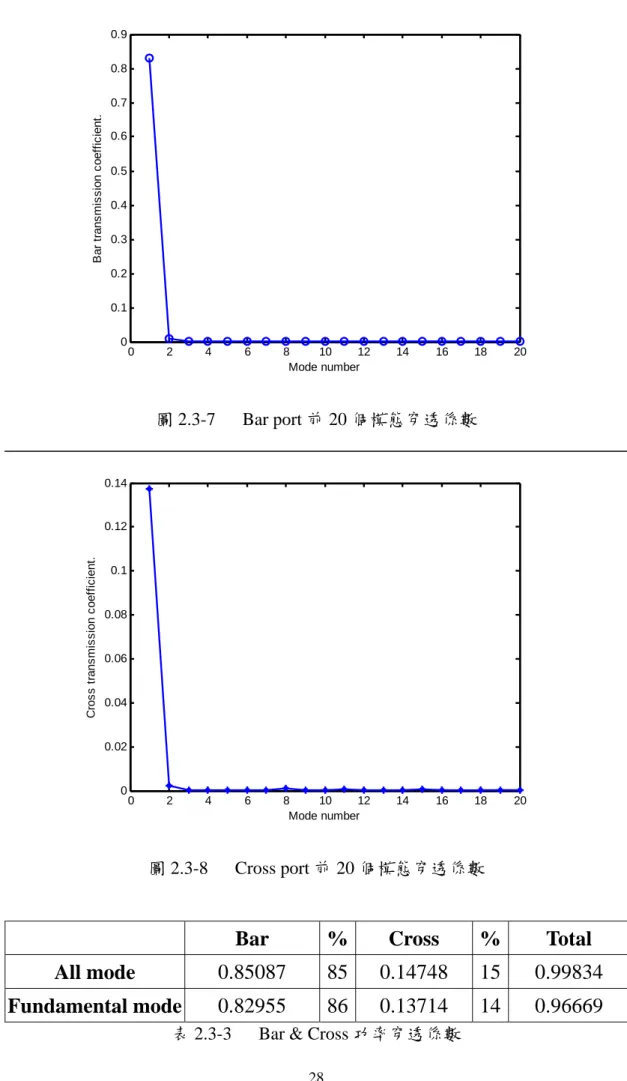
(30) 接著分別對四種不同的結構做分析,其結構圖分別在圖 2.3-1、 圖 2.3-5、圖 2.3-9 及圖 2.3-13。而分析後繪製出的能量份佈圖分別在 圖 2.3-2、圖 2.3-6、圖 2.3-10 及圖 2.3-14。 我們比較這四種結構,其 Bar port 與 Cross port 輸出的前 20 個模 態之穿透係數,發現大部份的能量均集中在 fundamental mode 上,因 此這樣的設計是可以工作的,如圖 2.3-3 及圖 2.3-4、如圖 2.3-7 及圖 2.3-8、如圖 2.3-11 及圖 2.3-12、如圖 2.3-15 及圖 2.3-16。而四種結構 的穿透功率數據,並以全部模態加總與單一 fundamental mode 區分, 分別為表 2.3-2、表 2.3-3、表 2.3-4 及表 2.3-5。 圖 2.3-17 及圖 2.3-18,為當改變 MMI 的長度在 ±20μ m 時,Bar 與 Cross 對微量長度變化的穿透功率曲線,可發現在 0μ m 變化的位置 上,是很精準地維持在 85:15 的比例,因此這四種 MMI case 的設計 參數是相當理想的。. 24.
(31) (1) The conventional design n = 2.3 n = 2.95. n = 2.95. w = 2.2 μ m. n = 3.214735. W1 = 10μ m. Wgap = 2.8μ m. Lmmi = 644μ m 圖 2.3-1. 元件結構示意圖. -8 0.8. -6. 0.7. -4. x direction (μm). 0.6 -2 0.5 0 0.4 2 0.3 4. 0.2. 6. 8. 0.1. 0. 100. 200. 300 400 z direction (μm). 圖 2.3-2. 500. 元件能量分佈圖. 25. 600.
(32) 0.9 0.8. Bar transmission coefficient.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 6. 圖 2.3-3. 8 10 12 Mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16. Cross transmission coefficient.. 0.14 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 6. 圖 2.3-4. 8 10 12 Mode number. 14. 16. 18. 20. Cross port 前 20 個模態穿透係數. Bar. %. Cross. %. Total. All mode. 0.84426. 85. 0.15336. 15. 0.99761. Fundamental mode. 0.82144. 85. 0.14119. 15. 0.96263. 表 2.3-2. Bar & Cross 功率穿透係數 26.
(33) (2) The new symmetric stepped-width design n = 2.3 n = 2.95. n = 2.95. w = 2.2 μ m n = 3.214735. Wgap = 2.8μ m. WN = 7.2 μ m. W1 = 10 μ m. LN = 228μ m LH = 107 μ m. LH = 107 μ m 圖 2.3-5. 元件結構示意圖. -8 0.8. -6. 0.7. -4. 0.6 x direction (μm). -2 0.5 0 0.4 2 0.3 4 0.2 6. 8. 0.1. 0. 50. 100. 150. 200 250 z direction (μm). 圖 2.3-6. 300. 350. 元件能量分佈圖. 27. 400. 450.
(34) 0.9 0.8. Bar transmission coefficient.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 6. 圖 2.3-7. 8 10 12 Mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.14. Cross transmission coefficient.. 0.12. 0.1. 0.08. 0.06. 0.04. 0.02. 0. 0. 2. 4. 6. 圖 2.3-8. 8 10 12 Mode number. 14. 16. 18. 20. Cross port 前 20 個模態穿透係數. Bar. %. Cross. %. Total. All mode. 0.85087. 85. 0.14748. 15. 0.99834. Fundamental mode. 0.82955. 86. 0.13714. 14. 0.96669. 表 2.3-3. Bar & Cross 功率穿透係數 28.
(35) (3) The symmetric parabolically tapered design n = 2.3 n = 2.95. n = 2.95. w = 2.2 μ m. n = 3.214735. W0 = 7.2μ m. Wgap = 2.8μ m. W1 = 10μ m. Lmmi = 418μ m 圖 2.3-9. 元件結構示意圖. -8 0.9 -6 0.8 -4. x direction (μm). 0.7 -2. 0.6. 0. 0.5 0.4. 2. 0.3 4 0.2 6. 8. 0.1. 0. 50. 100. 150. 200 250 z direction (μm). 圖 2.3-10. 300. 元件能量分佈圖. 29. 350. 400.
(36) 0.8. Bar transmission coefficient.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 6. 圖 2.3-11. 8 10 12 Mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16. Cross transmission coefficient.. 0.14 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 6. 圖 2.3-12. 8 10 12 Mode number. 14. 16. 18. 20. Cross port 前 20 個模態穿透係數. Bar. %. Cross. %. Total. All mode. 0.81429. 82. 0.18151. 18. 0.99581. Fundamental mode. 0.78088. 84. 0.14451. 16. 0.92539. 表 2.3-4. Bar & Cross 功率穿透係數 30.
(37) (4) The symmetric tapered and stepped design n = 2.3 n = 2.95. n = 2.95. w = 2.2 μ m. W0 = 8.9μ m n = 3.214735 Wgap = 2.8μ m. WN = 6.4 μ m. W1 = 10μ m. LN = 181μ m LH = 92μ m. LH = 92μ m. 圖 2.3-13. 元件結構示意圖. -8. 0.8. -6. 0.7. -4. 0.6 x direction (μm). -2 0.5 0 0.4 2 0.3 4 0.2 6. 8. 0.1. 0. 50. 100. 150 200 z direction (μm). 圖 2.3-14. 250. 300. 元件能量分佈圖. 31. 350.
(38) 0.9 0.8. Bar transmission coefficient.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 6. 圖 2.3-15. 8 10 12 Mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16. Cross transmission coefficient.. 0.14 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 6. 圖 2.3-16. 8 10 12 Mode number. 14. 16. 18. 20. Cross port 前 20 個模態穿透係數. Bar. %. Cross. %. Total. All mode. 0.83945. 84. 0.15848. 16. 0.99794. Fundamental mode. 0.82235. 85. 0.14646. 15. 0.96882. 表 2.3-5. Bar & Cross 功率穿透係數 32.
(39) 改變 MMI 長度: ΔL = ±20μ m. 0.95 0.9. Bar / (Bar+Cross). 0.85 0.8 0.75 0.7 conventional new symmetric stepped-width symmetric parabolically tapered symmetric tapered and stepped. 0.65 0.6 0.55 -20. -15. -10. -5. 0 MMI Δ L (μm). 5. 10. 15. 20. Bar power transmission ratio - ΔL. 圖 2.3-17. 0.5 conventional new symmetric stepped-width symmetric parabolically tapered symmetric tapered and stepped. 0.45. Cross / (Bar+Cross). 0.4 0.35 0.3 0.25 0.2 0.15 0.1 -20. -15. 圖 2.3-18. -10. -5. 0 MMI Δ L (μm). 5. 10. 15. Cross power transmission ratio - ΔL. 33. 20.
(40) 第三章 CTMIE 理論分析 MMI 3. 1 CTMIE 理論基本觀念 在上一章所述之 FEMET 理論是不考慮反射情況下所發展的,然 而在實際的情況裡,即使確定干涉區裡的能量會大部份地集中在輸出 波導上的位置,但仍是有少部份的能量會落在不連續介質的界面上, 造成能量的少部份反射。因此在整體結構上除了能量的傳遞,也將考 慮在結構界面上的反射,相同的在干涉區為特殊結構的 MMI,亦會 產生不連續介質的界面,在這樣的界面上也是需要將場量的傳遞與反 射情形加入。 (1). (2). z0. (3). z1 圖 3.1-1. 2 × 2 MMI 結構圖. 而 耦 合 橫 向 模 態 積 分 方 程 式 (couple transverse mode integral equation , CTMIE),便是在考慮反射情況下所發展出來的精確理論, 仿 2-1 小節先僅對 2 × 2 MMI 簡單對稱結構做基本觀念的介紹,如圖 3.1-1 所示之簡單 MMI 結構,第 1 區為輸入波導區,第 2 區為干涉波 34.
(41) 導區,第 3 區為輸出波導區。 根 據 [9]的 操 作 , 首 先 定 義 每 一 區 的 場 量 分 佈 型 式 U (1) ( x, z ) 、 U (2) ( x, z )、U (3) ( x, z ),由 Maxwell eq.推導出切線場量 U t(1) ( x, z )、U t(2) ( x, z ) 、 U t(3) ( x, z ) ,接著在界面上假設已知界面未知場量 u1 ( x) 、 u2 ( x) ,利用這. 兩個界面上的場值可以令切線場量的係數用未知場量 u1 ( x)、u2 ( x) 來替 代成為 U t(1) ( x, z , u1 ( x)) 、 U t(2) ( x, z , u1 ( x), u2 ( x)) 、 U t(3) ( x, z, u2 ( x)) 。利用在界面 相 鄰 兩 區 場 值 連 續 的 觀 念 U t(1) ( x, z , u1 ( x)) = U t(2) ( x, z, u1 ( x), u2 ( x)) 、 U t(2) ( x, z , u1 ( x), u2 ( x)) = U t(3) ( x, z , u2 ( x)) ,可推導出兩個特殊的聯立積分方程. 式,分析後可得未知場量 u1 ( x) 、 u2 ( x) 的精確解,即知道 U (1) ( x, z ) 、 U (2) ( x, z ) 、 U (3) ( x, z ) 的完整形式,便可分析出 MMI 的場形。. 本節已概略描述簡單對稱結構 MMI 之 CTMIE 理論的基本觀 念,從下節開始將以 TE 極化入射,針對特殊結構 MMI 做 CTMIE 理論架構詳盡的說明。. 35.
(42) 3. 2 對稱性理論 對稱性有上下對稱的方式及左右對稱的方式,以圖 3.1-1 所示的 結構則為上下對稱加上左右對稱的結構,在結構對稱線擺上 EW、 MW 邊界條件,分別以兩個字母 E、M 表示,E 代表 EW 邊界條件, M 代表 MW 邊界條件,會形成 E/E、E/M、M/M、M/E 四種情況,如 圖 3.2-1 所示。 前一個字母代表令上下對稱之對稱線,後一個字母代表令左右對 稱之對稱線,其中 MW 的意義是指場量微分後為零,在 MW 處有極 值;EW 的意義是指場量本身為零,在 EW 處為正負交界處。 ➀ M/M. ➁ E/E. MW. EW. EW. MW. ➂ E/M. ➃ M/E. MW. EW. MW. EW. 圖 3.2-1. 以對稱性分類的四種情況. 假設定義入射區為左下區,則由左下區出來的 scattering 參數定 義為 S1 ,由左上區出來的 scattering 參數定義為 S2 ,由右上區出來的 36.
(43) scattering 參數定義為 S3 ,由右下區出來的 scattering 參數定義為 S4 , 如圖 3.2-2 所示。. S2. S3. S1. S4. 圖 3.2-2. scattering 參數定義. 則可得到 scattering 參數的關係式:. S1 =. M/M + E/E + E/M + M/E 4. S2 =. M/M - E/E - E/M + M/E 4. S3 =. M/M + E/E - E/M - M/E 4. S4 =. M/M - E/E + E/M - M/E 4. 37.
(44) 3. 3 TE 入射 CTMIE 理論場量積分形式推導 (1). (m). (N+1). n1. n2. z1. zm −1. 圖 3.3-1. n2. zN. zm. 2× 2 特殊結構 MMI 分區示意圖. 在 2-2 節中所使用的對稱性是上下對稱的方式對 MMI 做分析, 以圖 3.3-1 斜邊結構的 MMI,不僅上下為對稱性質,左右亦是為對稱 的性質,所以可利用對稱性簡化成 1 4 的結構,如圖 3.3-2 所示。. (1). EW/MW. (2). (m). Δz2. Δzm. z1. zm −1. (N). (N+1). Δz N +1. zm. zN EW/MW. 圖 3.3-2. 對稱性簡化結構. 38.
(45) 接著分別定義第 1 ~ N + 1 區的 TE 極化場量形式,且每一區的 μ = μ0 (1) 第 1 區: 假設為第 i 個單一模態入射形式,並加入多模反射的形式, E y(1) ( x, z ) = φi(1) ( x)e − j βi. (1). ( z − z1 ). + ∑ rn′φn(1) ( x)e j βn. (1). ( z − z1 ). (3.3-1). n. 把 superposition 的第 i 項提出來, E y(1) ( x, z ) = φi(1) ( x)e − j βi. (1). ( z − z1 ). + φi(1) ( x)e j βi. (1). ( z − z1 ). + ∑ rnφn(1) ( x)e j β n. (1). ( z − z1 ). n. 將上式前兩項合併成三角函數, E y(1) ( x, z ) = −2 jφi(1) ( x) sin β i(1) ( z − z1 ) + ∑ rnφn(1) ( x )e j β n. (1). ( z − z1 ). (3.3-2). n. ⎧r ′ = r. with n ≠ i. 其中 ⎨ n n ⎩rn′ = rn − 1 with n = i (2) 第 m 區,m=2 ~ N: 在第 m 區中的場量可以寫成兩種形式,第一種是寫成一個前進波加 上後退波形式,也就是類似式(3.3-1)的表示式, E y( m ) ( x, z ) = ∑ An( m )φn( m ) ( x)e − j β n. (m). ( z − zm−1 ). n. + ∑ Bn( m )φn( m ) ( x)e j β n. (m). ( z − zm ). (3.3-3). n. 亦可表示成兩個前進波相加的形式, E y( m ) ( x, z ) = ∑ An( m )φn( m ) ( x)e − j βn. (m). n. ( z − zm−1 ). + ∑ Bn( m )φn( m ) ( x)e − j β n. (m). ( zm − z ). (3.3-4). n. 由於場量分布是由兩個入射及反射所構成,因此在此區域內會形成駐 波,駐波即可以表示成三角函數的形式,我們可以直接把式(3.3-4)表 39.
(46) 示成第二種表示法,也就是駐波形式, E y( m ) ( x, z ) = ∑ An( m )φn( m ) ( x) sin β n( m ) ( z − zm −1 ) + ∑ Bn( m )φn( m ) ( x) sin β n( m ) ( zm − z ) n. n. 在此作更進一步的推導,把兩個介面上的連續條件考慮進來,並且歸 一化使其成為一組正交而且又是滿足自然邊界化(1 或 0)的函數, 這樣子我們就可以很方便的檢查連續條件,並且使得計算更加的簡 化,這個 shifted normalized sine function[10]如下, E y( m ) ( x, z ) = ∑ an( m )φn( m ) ( x) n. sin β n( m ) ( zm − z ) sin β n( m ) ( z − zm −1 ) (m) (m) , + b φ ( x ) ∑n n n sin β n( m ) zm sin β n( m ) zm. zm = zm − zm −1. (3.3-5). E y( m ) ( x, z = zm −1 ) = ∑ an( m )φn( m ) ( x) 即為 z = zm −1 處的場量 n. E y( m ) ( x, z = zm ) = ∑ bn( m )φn( m ) ( x) 即為 z = zm 處的場量 n. 在分母不為 0 的情況下,這兩項為獨立函數。 (3) 第 N+1 區: 此區的場量形式在原始結構是包括前進波及後退波,即如同第 m 區 所表示的駐波場量形式,而使用對稱性後所簡化的結構,在第 N+1 區需考慮邊界的連續條件,則會僅剩下前進波的形式,歸一化後的場 量形式依邊界條件區分,. 40.
(47) ⎧ ( N +1) sin β n( N +1) ( z N − z ) ( N +1) E ( x , z ) t φ ( x ) with E Wall = ∑n n n ⎪ y sin β n( N +1) z N +1 ⎪ ⎨ ( N +1) ⎪ E ( N +1) ( x, z ) = t φ ( N +1) ( x) cos β n ( z N − z ) with M Wall ∑n n n ⎪⎩ y cos β n( N +1) z N +1. (3.3-6). CTMIE 理論在界面上不僅要場量連續,也要考慮切線場量連續 的部份,在無源的情況下的 Maxwell equation, ∇ × E = − jωμ H. (3.3-7). 切線磁場,即 x 方向的磁場, Hx = −. 1 ⎛ ∂E y ∂Ez ⎞ − ⎜ ⎟ jωμ ⎝ ∂z ∂x ⎠. TE 極化入射,則 Ez = 0 ,切線磁場與電場的關係式, Hx = −. 1 ∂E y jωμ ∂z. (3.3-8). 則每一區的切線磁場形式為, (1) 第 1 區: H x(1) ( x, z ) =. 1 ⎧ (1) (1) j β (1) ( z − z1 ) ⎫ (1) (1) (1) ⎨2 βi φi ( x) cos βi ( z − z1 ) − ∑ β n rnφn ( x)e n ⎬ ωμ ⎩ n ⎭. (3.3-9). (2) 第 m 區,m=2 ~ N: H. (m) x. ⎧ (m) (m) (m) cos β n( m ) ( zm − z ) ( x, z ) = ∑ ⎨− β a φ ( x) sin β ( m) z ωμ n ⎩ n n n n m j. cos β n( m ) ( z − zm −1 ) ⎫ + β n( m )bn( m )φn( m ) ( x) ⎬ sin β n( m ) zm ⎭. (3) 第 N+1 區:. 41. (3.3-10).
(48) ⎧ ( N +1) cos β n( N +1) ( z N − z ) j ( N +1) ( N +1) H ( x , z ) β t φ ( x ) with E Wall = − ∑ n n n ⎪ x ωμ n sin β n( N +1) z N +1 ⎪ ⎨ sin β n( N +1) ( z N − z ) ( N +1) ( N +1) ⎪ H ( N +1) ( x, z ) = j β φ ( ) with M Wall t x ∑ n n ⎪⎩ x ωμ n n cos β n( N +1) z N +1. (3.3-11) 現在我們把每一區的磁場形式都表示出來了,接著要在各個界面 上做連續條件。先假設在每一個介面上的場量我們都知道,利用連續 條件,即可以把每一區的係數用未知場量來表示,如圖 3.3-.所示之 Em ( x) ,可將所有場量形式變成都是包括未知場量形式的函數。. z1. (1). zm −1. (2). E1 ( x). zm. (m). Em −1 ( x) Em ( x) 圖 3.3-3. zN. (N). (N+1). EN ( x). 界面上未知場量. 透過連續條件,並利用正交函數的內積特性,如式(2.2-6),將係數表 示成下列形式, rn = ∫ E1 ( x) ⎡⎣φn(1) ( x) *⎤⎦ dx. (3.3-12). an( m ) = ∫ Em −1 ( x) ⎡⎣φn( m ) ( x) *⎤⎦ dx. (3.3-13). 42.
(49) bn( m ) = ∫ Em ( x) ⎡⎣φn( m ) ( x) *⎤⎦ dx. (3.3-14). tn = ∫ EN ( x) ⎡⎣φn( N +1) ( x) *⎤⎦ dx. (3.3-15). 將式(3.3-12) ~ 式(3.3-15)的係數表示式,代入式(3.3-9) ~ 式(3.3-11) 的磁場表示式中, (1) 第 1 區: H x(1) ( x, z ) =. 1 ⎧ (1) (1) (1) ⎨2 β φ ( x) cos β i ( z − z1 ) ωμ ⎩ i i − ∑ β n(1) ⎡ ∫ E1 ( x ') ⎡⎣φn(1) ( x ') *⎤⎦ dx '⎤ φn(1) ( x)e jβn ⎣ ⎦ n. (1). ( z − z1 ). ⎫ ⎬ ⎭. (3.3-16) (2) 第 m 區,m=2 ~ N: H x( m ) ( x, z ) =. ⎧ (m) cos β n( m ) ( zm − z ) (m) (m) ⎡ ⎤ ⎡ ⎤ E x x dx x − β ( ') φ ( ') * ' φ ( ) ⎨ ∑ ⎣ n ⎦ ⎦ n ωμ n ⎩ n ⎣ ∫ m −1 sin β n( m ) zm j. +β. (m) n. (m) ⎫ ⎡ Em ( x ') ⎡φn( m ) ( x ') *⎤ dx '⎤ φn( m ) ( x) cos β n ((mz) − zm −1 ) ⎬ ⎣ ⎦ ⎦ ⎣∫ sin β n zm ⎭. (3.3-17) (3) 第 N+1 區: ⎧ ( N +1) cos β n( N +1) ( z N − z ) j ( N +1) ( N +1) ( N +1) ⎡ ⎤ ⎡ ⎤ H ( x , z ) = − β E ( x ') φ ( x ') * dx ' φ ( x ) ∑ n ⎣∫ N ⎣ n ⎪ x ⎦ ⎦ n ωμ n sin β n( N +1) z N +1 ⎪ ⎪ with E Wall ⎪ ⎨ ⎪ ( N +1) ⎪ H x( N +1) ( x, z ) = j ∑ β n( N +1) ⎡ EN ( x ') ⎡φn( N +1) ( x ') *⎤ dx '⎤ φn( N +1) ( x) sin β n ( z N − z ) ⎣ ⎦ ⎦ ⎣∫ ωμ n cos β n( N +1) z N +1 ⎪ ⎪ with M Wall ⎩. (3.3-18) 接下來定義積分因子,目的在於簡化表示式的書寫,首先定義ηn(l ) ,. 43.
(50) η. (l ) n. β n(l ) = , l = 1 ~ N +1 ωμ. (3.3-19). 現在將式(3.3-16) ~ 式(3.3-18)做進一步的整理, (1) 第 1 區: H x(1) ( x, z ) = 2ηi(1)φi(1) ( x) cos βi(1) ( z − z1 ) − ∫ G (1) ( x, x ', z ) E1 ( x ')dx ' , G (1) ( x, x ', z ) = ∑η n(1)φn(1) ( x) ⎡⎣φn(1) ( x ') *⎤⎦ e jβn. (1). ( z − z1 ). (3.3-20). n. G (1) ( x, x ', z ) 即為第 1 區所定義的積分因子. (2) 第 m 區,m=2 ~ N: H x( m ) ( x, z ) = ∫ G ( m,l ) ( x, x ', z ) Em −1 ( x ')dx ' + ∫ G ( m ,r ) ( x, x ', z ) Em ( x ')dx ' , ⎧ ( m ,l ) cos β n( m ) ( zm − z ) (m) (m) (m) ⎡ ⎤ = − G ( x , x ', z ) j η φ ( x ) φ ( x ') * ∑n n n ⎣ n ⎪ ⎦ sin β ( m ) z ⎪ n m ⎨ (m) cos β n ( z − zm −1 ) ⎪G ( m ,r ) ( x, x ', z ) = jη n( m )φn( m ) ( x) ⎡⎣φn( m ) ( x ') *⎤⎦ ∑ ⎪⎩ sin β n( m ) zm n. (3.3-21). G ( m ,l ) ( x, x ', z ) 為左邊界面的積分因子 G ( m ,r ) ( x, x ', z ) 為右邊界面的積分因子. (3) 第 N+1 區: H x( N +1) ( x, z ) = ∫ G ( N +1) ( x, x ', z ) EN ( x ')dx ' , ⎧ ( N +1) cos β n( N +1) ( z N − z ) ( N +1) ( N +1) ( N +1) ⎡ ⎤ G ( x , x ', z ) j ( x ) ( x ') * with E Wall η φ φ = − ∑n n n ⎪ ⎣ n ⎦ sin β ( N +1) z ⎪ n N +1 ⎨ sin β n( N +1) ( z N − z ) ( N +1) ( N +1) ( N +1) ⎪G ( N +1) ( x, x ', z ) = ⎡ ⎤ η φ φ j ( x ) ( x ') * with M Wall ∑n n n ⎣ n ⎦ cos β ( N +1) z ⎪⎩ n N +1. (3.3-22) G ( N +1) ( x, x ', z ) 為第 N+1 區的積分因子 44.
(51) 3. 4 PQRS 聯立積分方程矩陣 上一節最後,已把切線磁場的形式,以積分因子的定義,完整的 表示之,這節將利用切線磁場連續條件,形成由 N 個界面組合的聯 立積分方程矩陣,並以 PQRS 參數來表示這個矩陣。 (1). (2). (m). (N). R (1) P (2) R (2). P(m) R(m). P( N ) R( N ). Q (2) S (2). Q(m) S (m). Q ( N ) S ( N ) Q ( N +1). z1. zm −1 圖 3.4-1. (N+1). zm. zN. PQRS 參數示意圖. 這四個參數所代表的意義, P ( m ) :在第 m 區由左邊界面傳遞到右邊界面的影響 Q ( m ) :在第 m 區由左邊界面反射到左邊界面的影響 R ( m ) :在第 m 區由右邊界面反射到右邊界面的影響 S ( m ) :在第 m 區由右邊界面傳遞到左邊界面的影響. 在中間階梯近似的區域,在每一區兩側的界面上場值, 左側磁場為左側介面電場的反射與右側介面電場的傳遞合成: H x( m ) ( x, zm −1 ) = ∫ Q ( m ) ( x, x ') Em −1 ( x ')dx ' + ∫ S ( m ) ( x, x ') Em ( x ')dx '. 45. (3.4-1).
(52) 右側磁場為左側介面電場的傳遞與右側介面電場的反射合成: H x( m ) ( x, zm ) = ∫ P ( m ) ( x, x ') Em −1 ( x ')dx ' + ∫ R ( m ) ( x, x ') Em ( x ')dx '. (3.4-2). 其中 PQRS 參數與積分因子 G 的關係為, ⎧Q ( m ) ( x, x ') = G ( m,l ) ( x, x ', zm −1 ) = ∑ − jη n( m )φn( m ) ( x) ⎡φn( m ) ( x ') *⎤ cot β n( m ) zm ⎣ ⎦ ⎪ n ⎪ (m) ( m,r ) ( x, x ', zm −1 ) = ∑ jηn( m )φn( m ) ( x) ⎡⎣φn( m ) ( x ') *⎤⎦ csc β n( m ) zm ⎪ S ( x, x ') = G ⎪ n ⎨ (m) ( m ,l ) (m) (m) (m) (m) ⎪ P ( x, x ') = G ( x, x ', zm ) = ∑ − jη n φn ( x) ⎡⎣φn ( x ') *⎤⎦ csc β n zm n ⎪ ⎪ R ( m ) ( x, x ') = G ( m ,r ) ( x, x ', z ) = ∑n jηn( m)φn( m) ( x) ⎡⎣φn( m) ( x ') *⎤⎦ cot β n( m) zm m ⎪⎩ ⎧⎪ S ( m ) ( x, x ') = − P ( m ) ( x, x ') 其中 ⎨ ( m ) (m) ⎪⎩ R ( x, x ') = −Q ( x, x '). (3.4-3). 同樣的,把第 1 區與第 N+1 區的磁場也以 PQRS 參數來表,而其 PQRS 參數則與式(3.4-3)所定義並不相同, 第 1 區: H x(1) ( x, z1 ) = 2ηi(1)φi(1) ( x) + ∫ R (1) ( x, x ', z ) E1 ( x ')dx ' ,. R (1) ( x, x ') = G (1) ( x, x ', z1 ) = ∑ −ηn(1)φn(1) ( x) ⎡⎣φn(1) ( x ') *⎤⎦. (3.4-4). n. 第 N+1 區: H x( N +1) ( x, z N ) = ∫ Q ( N +1) ( x, x ') EN ( x ')dx ' , ⎧Q ( N +1) ( x, x ') = G ( N +1) ( x, x ', z1 ) = ∑ − jη n( N +1)φn( N +1) ( x) ⎡φn( N +1) ( x ') *⎤ cot β n( N +1) z N +1 ⎣ ⎦ ⎪ n ⎪ with E Wall ⎪ ⎨ ( N +1) ( x, x ') = G ( N +1) ( x, x ', z1 ) = ∑ jη n( N +1)φn( N +1) ( x) ⎡⎣φn( N +1) ( x ') *⎤⎦ tan β n( N +1) z N +1 ⎪Q n ⎪ ⎪⎩ with M Wall. (3.4-5) 46.
(53) 式(3.4-3) ~ 式(3.4-5)已把所有區域的 PQRS 形式完整的描述出 來,接著在每個界面上做磁場連續條件,即可形成一個 N 個界面組 合的聯立積分方程矩陣。 ⎡ G1,1 G1,2 ⎢ ⎢G2,1 G2,2 ⎢ ⎢ ⎢ 0 ∫ ⎢⎢ 0 ⎢ 0 ⎢ ⎢ ⎢ 0 ⎢ ⎣⎢ 0. 0 G2,3. Gk ,k −1 Gk ,k. ⎤ ⎡ E1 ( x′) ⎤ ⎡ H inc ( x) ⎤ ⎥⎢ ⎥ ⎢ 0 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ E k −1 ( x′) ⎥ ⎢ ⎥ ⎥ 0 ⎥ ⎢ E k ( x′) ⎥ dx′ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ E k +1 ( x′) ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ GN −1, N ⎥ ⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ GN , N ⎦⎥ ⎣ E N ( x′) ⎦ ⎣ 0 ⎦. 0 0. Gk ,k +1. GN −1, N − 2 GN −1, N −1 GN , N −1 0. (3.4-6) 其中每一項元素為, G1,1 = R (1) − Q (2) , G1,2 = − S (2) G2,1 = P (2) , G2,2 = R (2) − Q (3) , G2,3 = − S (3) Gk , k −1 = P ( k ) , Gk ,k = R ( k ) − Q ( k +1) , Gk ,k +1 = − S ( k +1) GN −1, N − 2 = P ( N −1) , GN −1, N −1 = R ( N −1) − Q ( N ) , GN −1, N = − S ( N ) GN , N −1 = P ( N ) , GN , N = R ( N ) − Q ( N +1). H inc ( x) = −2ηi(1)φi(1) ( x). 由式(3.4-3)可知 S ( m ) ( x, x ') = − P ( m ) ( x, x ') ,因此 Gk ,k +1 = Gk +1,k , k = 1 ~ N − 1 , 所以式(3.4-6)是一個對稱的 N × N 矩陣。. 47.
(54) 3. 5 重疊積分 式(3.4-6)是一個對稱的 N × N 矩陣,而這個矩陣是由 N 個聯立的積 分方程式所組成,要解這個矩陣,需引用正交投影的觀念,將積分因 子投影在界面基底上,也就是重疊積分(Overlap Integral)。就像是將 函數轉化為向量一樣,便可以把這個聯立積分方程轉成矩陣方程,容 易做數值運算,進而得到界面上的埸值。重疊積分定義如下:. (. O i ,i = O i , i. ). T. = ⎡⎣Oki ,,li ⎤⎦. (3.5-1). i :代表在第 i 個介面上的模態基底. i :代表在第 i 區的模態基底. Oki ,,li :代表矩陣內每一項元素. 由第 i 介面轉到第 i 區的 overlap integral 為, Oki ,,li = ∫ ϕk(i ) ( x)φl(i ) ( x)dx. (3.5-2). 而由第 i 介面轉到第 i+1 區的 overlap integral 為, Oki ,,li +1 = ∫ ϕk(i ) ( x)φl(i +1) ( x)dx. (3.5-3). 首先假設界面上的未知場量 Em ( x ') 是所有界面上基底的線性組合,共 有 y 項基底, Em ( x ') = c1( m )ϕ1( m ) ( x′) + c2( m )ϕ 2( m ) ( x′) +. + c y( m )ϕ y( m ) ( x′) , m = 1 ~ N. 48. (3.5-4).
(55) 改寫成矩陣形式即為. Em ( x ') = ⎡⎣ϕ1( m ) ( x′). ⎡c1( m ) ⎤ ⎢ ⎥ ϕ y( m ) ( x′) ⎤⎦ ⎢ ⎥ ⎢c y( m ) ⎥ ⎣ ⎦. (3.5-5). 相同的我們把 PQRS 參數也改寫成矩陣形式,由式(3.4-3). Q ( m ) ( x, x ') = ⎡⎣φ1( m ) ( x). ⎡ − jη1( m ) cot β1( m ) zm ⎢ φn( m ) ( x) ⎤⎦ ⎢ ⎢ 0 ⎣. S ( m ) ( x, x ') = ⎣⎡φ1( m ) ( x). ⎡ jη1( m ) csc β1( m ) zm ⎢ φn( m ) ( x) ⎦⎤ ⎢ ⎢ 0 ⎣. p ( m ) ( x, x ') = ⎡⎣φ1( m ) ( x). ⎡ − jη1( m ) csc β1( m ) zm ⎢ φn( m ) ( x) ⎤⎦ ⎢ ⎢ 0 ⎣. R ( m ) ( x, x ') = ⎡⎣φ1( m ) ( x). ⎡ jη1( m ) cot β1( m ) zm ⎢ φn( m ) ( x) ⎤⎦ ⎢ ⎢ 0 ⎣. 0 − jη n( m ) cot β n( m ) 0 jη n( m ) csc β n( m ). ⎤ ⎡φ1( m ) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ (m) ⎥ ⎢ zm ⎦ ⎣φn ( x ') ⎥⎦. ⎤ ⎡φ1( m ) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ (m) ⎥ ⎢ zm ⎦ ⎣φn ( x ') ⎥⎦. ⎤ ⎡φ1( m ) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ − jηn( m ) csc β n( m ) zm ⎥⎦ ⎢⎣φn( m ) ( x ') ⎥⎦ ⎤ ⎡φ1( m ) ( x ') ⎤ 0 ⎥⎢ ⎥ ⎥⎢ ⎥ jη n( m ) cot β n( m ) zm ⎥⎦ ⎢⎣φn( m ) ( x ') ⎥⎦. (m) (m) ⎪⎧ S ( x, x ') = − P ( x, x ') 其中 ⎨ ( m ) (m) ⎪⎩ R ( x, x ') = −Q ( x, x '). 0. (3.5-6). 由式(3.4-4). R (1) ( x, x ') = ⎡⎣φ1(1) ( x). ⎡ − jη1(1) ⎢ φn(1) ( x) ⎤⎦ ⎢ ⎢ 0 ⎣. ⎤ ⎡φ1(1) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ − jη n(1) ⎥⎦ ⎢⎣φn(1) ( x ') ⎥⎦ 0. 由式(3.4-5). 49. (3.5-7).
(56) ⎧ ⎡φ1( N +1) ( x) φn( N +1) ( x) ⎤⎦ ⋅ ⎣ ⎪ ⎪ ⎡ − jη1( N +1) cot β1( N +1) z N +1 ⎪⎢ ⎪⎢ ⎪⎢ 0 ⎪⎣ ⎪ ⎪ ( N +1) Q ( x, x ') = ⎨ ⎪ ( N +1) ( x) φn( N +1) ( x) ⎤⎦ ⋅ ⎪ ⎡⎣φ1 ⎪ ( N +1) tan β1( N +1) z N +1 ⎪ ⎡ jη1 ⎪⎢ ⎪⎢ 0 ⎪ ⎢⎣ ⎪ ⎩. 0 − jη n( N +1) cot β n( N +1). ⎤ ⎡φ1( N +1) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ z N +1 ⎥⎦ ⎢⎣φn( N +1) ( x ') ⎥⎦ with E Wall. 0 jη n( N +1) tan β n( N +1). ⎤ ⎡φ1( N +1) ( x ') ⎤ ⎥⎢ ⎥ ⎥⎢ ⎥ z N +1 ⎥⎦ ⎢⎣φn( N +1) ( x ') ⎥⎦ with M Wall. (3.5-8) 式(3.5-5) ~ 式(3.5-8)已把方程式展開成矩陣形式,代回式(3.4-6) 的聯立積分方程矩陣中,並透過正交投影把積分因子中的基底 φ 投影 到界面上的基底 ϕ ,即將每一個界面積分方程式,乘上該個界面的基 底後,並再做一次積分。. 以式(3.4-6)矩陣中的第 k 條積分方程式為例:. ∫P. (k ). ( x, x ') Ek −1 ( x ')dx ' +. ∫ ⎡⎣ R. (k ). ( x, x ') − Q ( k +1) ( x, x ') ⎤⎦ Ek ( x ')dx ' = 0 |. ∫S. ( k +1). ( x, x ') Ek +1 ( x ')dx '. 乘上界面基底並做積分,. 50. (3.5-9).
(57) (1) ∫ ϕ y( k ) ( x) ∫ P ( k ) ( x, x ') Ek −1 ( x ')dx 'dx ⎡ϕ1( k ) ( x) ⎤ ⎢ ⎥ (k ) ∫ ⎢ ( k ) ⎥ ⎡⎣φ1 ( x) ⎢ϕ y ( x) ⎥ ⎣ ⎦ i. ⇒. ⎡ − jη1( k ) csc β1( k ) zk ⎢ ⎢ ⎢ 0 ⎣. φn( k ) ( x) ⎤⎦ dx. 0 − jη n( k ) csc β n( k ). ⎤ ⎥ ⎥ zk ⎥⎦. i ⎡φ1( k ) ( x ') ⎤ ⎢ ⎥ ( k −1) ∫ ⎢ ( k ) ⎥ ⎡⎣ϕ1 ( x ') ⎢φn ( x ') ⎥ ⎣ ⎦. ⎡c1( k −1) ⎤ ⎢ ⎥ ϕ y( k −1) ( x ') ⎤⎦ dx ' ⎢ ⎥ ⎢c (yk −1) ⎥ ⎣ ⎦. ⎡ − jη1( k ) csc β1( k ) zm ⎢ ⇒ O k ,k ⎢ ⎢ 0 ⎣. ⇒ O k ,k. 0 − jη n( k ) csc β n( k ). ⎡ − jη1( k ) csc β1( k ) zm ⎢ ⎢ ⎢ 0 ⎣. 0 − jη n( k ) csc β n( k ). ⎤ ⎡c1( k −1) ⎤ ⎥ k , k −1 ⎢ ⎥ ⎥O ⎢ ⎥ ( k −1) ⎥ ⎥ ⎢ zm ⎦ ⎣c y ⎦ ⎤ ⎥ ⎡ k −1, k ⎤T ⎥ ⎣O ⎦ zm ⎥⎦. (2) ∫ ϕ y( k ) ( x) ∫ R ( k ) ( x, x ') Ek ( x ')dx 'dx. ⇒. ⎡ϕ1( k ) ( x) ⎤ ⎢ ⎥ (k ) ∫ ⎢ ( k ) ⎥ ⎡⎣φ1 ( x) ⎢ϕ y ( x) ⎥ ⎣ ⎦. φn( k ) ( x) ⎤⎦ dx. i ⎡ jη1( k ) cot β1( k ) zk ⎢ ⎢ ⎢ 0 ⎣. 0 jηn( k ) cot β n( k ). ⎤ ⎥ ⎥ zk ⎥⎦. i ⎡φ ( x ') ⎤ ⎢ ⎥ (k ) ∫ ⎢ ( k ) ⎥ ⎡⎣ϕ1 ( x ') ⎢φn ( x ') ⎥ ⎣ ⎦ (k ) 1. ⎡c1( k ) ⎤ ⎢ ⎥ ϕ y( k ) ( x ') ⎤⎦ dx ' ⎢ ⎥ ⎢c y( k ) ⎥ ⎣ ⎦. 51. ⎡c1( k −1) ⎤ ⎢ ⎥ ⎢ ⎥ (3.5-10) ( k − 1) ⎢c y ⎥ ⎣ ⎦.
(58) ⎡ jη1( k ) cot β1( k ) zk ⎢ ⇒ O k ,k ⎢ ⎢ 0 ⎣. ⇒ O k ,k. 0 jηn( k ) cot β n( k ). ⎡ jη1( k ) cot β1( k ) zk ⎢ ⎢ ⎢ 0 ⎣. 0 jη. (k ) n. cot β. (k ) n. ⎤ ⎥ k ,k ⎥O zk ⎥⎦. ⎡c1( k ) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢c (yk ) ⎥ ⎣ ⎦. ⎤ ⎥ ⎡ k ,k ⎤T ⎥ ⎣O ⎦ zk ⎥⎦. ⎡c1( k ) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢c (yk ) ⎥ ⎣ ⎦. (3.5-11). (3) ∫ ϕ y( k ) ( x) ∫ Q ( k +1) ( x, x ') Ek ( x ')dx 'dx. ⇒. ⎡ϕ1( k ) ( x) ⎤ ⎢ ⎥ ( k +1) ∫ ⎢ ( k ) ⎥ ⎡⎣φ1 ( x) ⎢ϕ y ( x) ⎥ ⎣ ⎦ i ⎡ − jη1( k +1) cot β1( k +1) zk +1 ⎢ ⎢ ⎢ 0 ⎣. φn( k +1) ( x) ⎤⎦ dx. 0 − jη n( k +1) cot β n( k +1). ⎤ ⎥ ⎥ zk +1 ⎥⎦. i ⎡φ1( k +1) ( x ') ⎤ ⎢ ⎥ (k ) ∫ ⎢ ( k +1) ⎥ ⎡⎣ϕ1 ( x ') ⎢φn ( x ') ⎥ ⎣ ⎦. ⎡ − jη1( k +1) cot β1( k +1) zk +1 ⎢ ⇒ O k , k +1 ⎢ ⎢ 0 ⎣ ⎡ − jη1( k +1) cot β1( k +1) zk +1 ⎢ ⇒ O k , k +1 ⎢ ⎢ 0 ⎣. ⎡ c1( k ) ⎤ ⎢ ⎥ ϕ y( k ) ( x ') ⎤⎦ dx ' ⎢ ⎥ ⎢ c (yk ) ⎥ ⎣ ⎦. 0 − jηn( k +1) cot β n( k +1) 0 − jηn( k +1) cot β n( k +1). ⎤ ⎥ k +1,k ⎥O zk +1 ⎥⎦. ⎡ c1( k ) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ c (yk ) ⎥ ⎣ ⎦. ⎤ ⎥ ⎡ k ,k +1 ⎤T ⎥ ⎣O ⎦ zk +1 ⎥⎦. ⎡c1( k ) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢c (yk ) ⎥ ⎣ ⎦. (3.5-12) (4) ∫ ϕ y( k ) ( x) ∫ S ( k +1) ( x, x ') Ek +1 ( x ')dx 'dx. 52.
(59) ⇒. ⎡ϕ1( k ) ( x) ⎤ ⎢ ⎥ ( k +1) ∫ ⎢ ( k ) ⎥ ⎡⎣φ1 ( x) ⎢ϕ y ( x) ⎥ ⎣ ⎦. φn( k +1) ( x) ⎤⎦ dx. i ⎡ jη1( k +1) csc β1( k +1) zk +1 ⎢ ⎢ ⎢ 0 ⎣. 0 jηn( k +1) csc β n( k +1). ⎤ ⎥ ⎥ zk +1 ⎥⎦. i ⎡φ1( k +1) ( x ') ⎤ ⎢ ⎥ ( k +1) ∫ ⎢ ( k +1) ⎥ ⎡⎣ϕ1 ( x ') ⎢φn ( x ') ⎥ ⎣ ⎦. ⎡ c1( k +1) ⎤ ⎥ ⎢ ϕ y( k +1) ( x ') ⎤⎦ dx ' ⎢ ⎥ ⎢ c y( k +1) ⎥ ⎦ ⎣. ⎡ jη1( k +1) csc β1( k +1) zk +1 ⎢ ⇒ O k , k +1 ⎢ ⎢ 0 ⎣ ⎡ jη1( k +1) csc β1( k +1) zk +1 ⎢ ⇒ O k , k +1 ⎢ ⎢ 0 ⎣. 0 jηn( k +1) csc β n( k +1) 0 jηn( k +1) csc β n( k +1). ⎤ ⎡c1( k +1) ⎤ ⎥ k +1,k +1 ⎢ ⎥ ⎥O ⎢ ⎥ ⎢c (yk +1) ⎥ zk +1 ⎥⎦ ⎣ ⎦ ⎤ ⎥ ⎡ k +1, k +1 ⎤T ⎥ ⎣O ⎦ zk +1 ⎥⎦. ⎡c1( k +1) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢c (yk +1) ⎥ ⎣ ⎦. (3.5-13) 整理式(3.5-10) ~ 式(3.5-13)得到. ⎡Gk , k −1 Gk ,k ⎣. ⎡C k −1 ⎤ ⎡ 0 ⎤ ⎢ ⎥ ⎢ ⎥ Gk ,k +1 ⎤ ⎢ C k ⎥ = ⎢ 0 ⎥ ⎦ k +1 ⎢C ⎥ ⎢ 0 ⎥ ⎣ ⎦ ⎣ ⎦. (3.5-14). 其中. Gk ,k −1 = O. k ,k. ⎡ − jη1( k ) csc β1( k ) zm ⎢ ⎢ ⎢ 0 ⎣. 0 − jη n( k ) csc β n( k ). 53. ⎤ ⎥ ⎡ k −1, k ⎤T ⎥ ⎣O ⎦ zm ⎥⎦.
(60) Gk ,k = O. k ,k. ⎡ jη1( k ) cot β1( k ) zk ⎢ ⎢ ⎢ 0 ⎣. 0 jηn( k ) cot β n( k ). ⎡ − jη1( k +1) cot β1( k +1) zk +1 ⎢ − O k ,k +1 ⎢ ⎢ 0 ⎣. ⎤ ⎥ ⎡ k ,k ⎤T ⎥ ⎣O ⎦ zk ⎥⎦ 0. − jη n( k +1) cot β n( k +1). ⎡ jη1( k +1) csc β1( k +1) zk +1 ⎢ Gk ,k +1 = (−1)O k ,k +1 ⎢ ⎢ 0 ⎣. 0 jη n( k +1) csc β n( k +1). ⎤ ⎥ ⎡ k ,k +1 ⎤T ⎥ ⎣O ⎦ zk +1 ⎥⎦ ⎤ ⎥ ⎡ k +1,k +1 ⎤T ⎥ ⎣O ⎦ zk +1 ⎥⎦. ⎡c1( k ) ⎤ ⎡c1( k −1) ⎤ ⎡ c1( k +1) ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ k k +1 C k −1 = ⎢ ⎥ ⎥ ,C = ⎢ ⎥ ,C = ⎢ ⎢ c (yk +1) ⎥ ⎢c (yk ) ⎥ ⎢c (yk −1) ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦. 經由上述整理,最後整理出的矩陣方程如下, ⎡ G1,1 G1,2 ⎢ ⎢G2,1 G2,2 ⎢ ⎢ ⎢ 0 ⎢ ⎢ 0 ⎢ ⎢ 0 ⎢ ⎢ ⎢ 0 ⎢ ⎢⎣ 0. 0 G2,3. Gk ,k −1 Gk ,k. ⎤ 1 ⎥ ⎡ C ⎤ ⎡ H inc ⎤ ⎥ ⎥ ⎢ 0 ⎥⎢ ⎥ ⎢ 0 ⎥ ⎥⎢ ⎥ ⎥ ⎢ ⎥⎢ ⎥ ⎥ ⎢ k −1 ⎥ ⎢ C ⎢ ⎥ ⎢ ⎥ ⎥ k ⎥ ⎢ ⎥ (3.5-15) ⎢ 0 ⎥ C = ⎥ ⎥ ⎢ k +1 ⎥ ⎢ ⎥ ⎥ ⎢C ⎥ ⎢ ⎥ ⎥ ⎢ ⎥⎢ ⎢ ⎥ ⎢ ⎥ ⎥ ⎢ ⎥ ⎢ ⎥ GN −1, N ⎥ ⎢ ⎥ ⎢ ⎥ N ⎥ C ⎦ ⎣ 0 ⎦ GN , N ⎥⎦ ⎣ 0. Gk ,k +1. GN −1, N − 2. GN −1, N −1. 0. GN , N −1. 其中. H inc. ⎡ϕ1(1) ( x) ⎤ ⎡ϕ1(1) ( x) ⎤ ⎢ ⎥ ⎢ ⎥ (1) (1) = ∫⎢ ⎥ H inc ( x)dx = ∫ ⎢ ⎥ − 2ηi φi ( x)dx ⎢ϕ y(1) ( x) ⎥ ⎢ϕ y(1) ( x) ⎥ ⎣ ⎦ ⎣ ⎦. 54. (3.5-16).
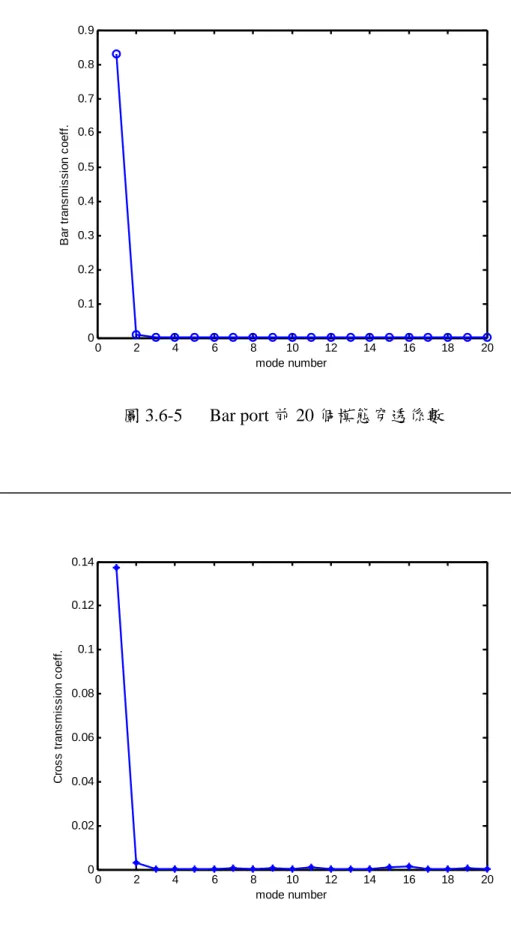
(61) 3. 6 數值模擬結果 圖 3.6-2 及圖 3.6-3、圖 3.6-5 及圖 3.6-6、圖 3.6-8 及圖 3.6-9、圖 3.6-11 及圖 3.6-12,為以 CTMIE 理論分析這四種結構,其 Bar port 與 Cross port 輸出的前 20 個模態之穿透係數,大部份的能量仍是均集 中在 fundamental mode 上。 而這四種結構的穿透功率數據,以輸入波導與輸出波導做為區 分,輸出波導的穿透量為穿透功率,輸入波導的穿透量即為反射功 率,如下圖所示。 Input port. Output port. Reflection. Cross. Reflection. Bar. 圖 3.6-1. Cross. Transmission. Bar. Transmission. Transmission 與 Reflection 示意圖. 相同的,亦以全部模態加總與單一 fundamental mode 區分,分別 為表 3.6-1、表 3.6-2、表 3.6-3 及表 3.6-4。 圖 3.6-4、圖 3.6-7、圖 3.6-10 及圖 3.6-13,為四種 MMI case 在改 變傳播距離時,其 Bar port 與 Cross port 的穿透功率比。. 55.
(62) (1) The conventional design 0.9 0.8. Bar transmission coeff.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 圖 3.6-2. 6. 8 10 12 mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16 0.14. Cross transmission coeff.. 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 圖 3.6-3. 6. 8 10 12 mode number. 14. 16. 18. Cross port 前 20 個模態穿透係數. 56. 20.
(63) Transmission (Output port). Bar. %. Cross. %. Total. All mode. 0.84578. 85. 0.15408. 15. 0.99985. Fundamental mode. 0.82139. 85. 0.14119. 15. 0.96259. Reflection (Input port). Bar. %. Cross. %. Total. All mode. 6.22132E-5. 51 5.92262E-5 49 1.21439E-4. Fundamental mode. 3.97781E-7. 77 1.18868E-7 23 5.16649E-7. 表 3.6-1. 穿透及反射能量數據. 1 Bar Cross. 0.9. Power transmission coefficient. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 100. 200. 圖 3.6-4. 300. 400. 500 L (μm). 600. 700. 800. Bar & Cross power transmission coefficient - L. 57. 900.
(64) (2) The new symmetric stepped-width design 0.9 0.8. Bar transmission coeff.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 圖 3.6-5. 6. 8 10 12 mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.14. Cross transmission coeff.. 0.12. 0.1. 0.08. 0.06. 0.04. 0.02. 0. 0. 2. 4. 圖 3.6-6. 6. 8 10 12 mode number. 14. 16. 18. Cross port 前 20 個模態穿透係數. 58. 20.
(65) Transmission (Output port). Bar. %. Cross. %. Total. All mode. 0.85123. 85. 0.14711. 15. 0.99834. Fundamental mode. 0.82920. 86. 0.13718. 14. 0.96638. Reflection (Input port). Bar. %. Cross. %. Total. All mode. 8.32824E-4. 51 7.95089E-4 49 1.62791E-3. Fundamental mode. 2.27214E-6. 40 3.40103E-6 60 5.67317E-6. 表 3.6-2. 穿透及反射能量數據. 0.9 Bar Cross. Power transmission coefficient. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 300. 400. 圖 3.6-7. 500. 600 L (μm). 700. 800. Bar & Cross power transmission coefficient - L. 59. 900.
(66) (3) The symmetric parabolically tapered design 0.8 0.7. Bar transmission coeff.. 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 圖 3.6-8. 6. 8 10 12 mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16 0.14. Cross transmission coeff.. 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 圖 3.6-9. 6. 8 10 12 mode number. 14. 16. 18. Cross port 前 20 個模態穿透係數. 60. 20.
(67) Transmission (Output port). Bar. %. Cross. %. Total. All mode. 0.82629. 83. 0.16814. 17. 0.99443. Fundamental mode. 0.79539. 85. 0.14145. 15. 0.93683. Reflection (Input port). Bar. %. Cross. %. Total. All mode. 3.24401E-3. 59 2.28217E-3 41 5.52618E-3. Fundamental mode. 1.27110E-5. 65 6.86614E-6 35 1.95772E-5. 表 3.6-3. 穿透及反射能量數據. 1 Bar Cross. 0.9. Power transmission coefficient. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 100. 200. 圖 3.6-10. 300. 400. 500 L (μm). 600. 700. 800. Bar & Cross power transmission coefficient - L. 61. 900.
(68) (4) The symmetric tapered and stepped design 0.9 0.8. Bar transmission coeff.. 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0. 0. 2. 4. 圖 3.6-11. 6. 8 10 12 mode number. 14. 16. 18. 20. Bar port 前 20 個模態穿透係數. 0.16 0.14. Cross transmission coeff.. 0.12 0.1 0.08 0.06 0.04 0.02 0. 0. 2. 4. 圖 3.6-12. 6. 8 10 12 mode number. 14. 16. 18. Cross port 前 20 個模態穿透係數. 62. 20.
(69) Transmission (Output port). Bar. %. Cross. %. Total. All mode. 0.84613. 85. 0.15172. 15. 0.99785. Fundamental mode. 0.82939. 86. 0.14063. 14. 0.97002. Reflection (Input port). Bar. %. Cross. %. Total. All mode. 9.15333E-4. 44 1.17931E-3 56 2.09465E-3. Fundamental mode. 2.95873E-6. 44 3.80252E-6 56 6.76126E-6. 表 3.6-4. 穿透及反射能量數據. 0.9 Bar Cross. Power transmission coefficient. 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 300. 400. 圖 3.6-13. 500. 600 L (μm). 700. 800. Bar & Cross power transmission coefficient - L. 63. 900.
(70) 第四章 比較與討論 前述二章分別利用 FEMET 與 CTMIE 理論對簡單及特殊結構的 MMI 做了一連串的分析與模擬,目的在比較近似解及正解的誤差 值。而我們所選用的 MMI 結構,屬 85:15 的 2 × 2 3dB coupler,從表 2.3-2 ~ 2.3-5 及表 3.6-1 ~ 3.6-4 的比較可發現,每一種設計的 case 裡, 無論是簡單的結構,或是需要切割成許多區域做運算的斜邊結構,Bar 及 Cross 的 transmission coefficient 均近似為 85:15 的比例。. Fimm Wave. Bar. Cross. (a). 0.83015. 0.14177. (b). 0.83626. 0.13977. (c). 0.79648. 0.14612. (d). 0.82232. 0.15134. FEMET (a). Bar 0.84426. Cross 0.15336. (b). 0.85087. 0.13714. (c). 0.81429. 0.18151. (d). 0.83945. 0.15848. CTMIE (a). Bar 0.84578. Cross 0.15408. (b). 0.85123. 0.14711. (c). 0.82629. 0.16814. (d). 0.84613. 0.15172. 表 4-1 穿透及反射能量數據 (a) conventional design (b) new symmetric stepped-width design (c) symmetric parabolically tapered design (d) The symmetric tapered and stepped design 64.
(71) 表 4-1 中我們與文獻[7]比較,以 Fimm Wave 所分析出的結果, 在這四種 case 裡,FEMET 的精確度上均較 Fimm Wave 來得高,而且 運算速度亦快速許多。FEMET 所分析出的有效位數可精確至小數點 第二位。 圖 4-1 ~ 圖 4-8 所示,比較四種 MMI case 在前 200 個模態下, Bar 與 Cross 的 Transmission coefficient,利用 FEMET 理論與 CTMIE 理論分析所比較出的絕對誤差,可發現 FEMET 所計算出的近似解與 CTMIE 的精確解是誤差相當小,且由 CTMIE 所模擬出的反射係數是 相當小的,因此設計參數確實是正確,並且可使元件正常工作,所以 Reflection coefficient 非常地小。. 65.
(72) (1) The conventional design -4. x 10. Bar absolute error. 3. 2. 1. 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-1 FEMET 與 CTMIE 之絕對誤差 (Bar port, Conventional design MMI case). -4. Cross absolute error. 1.5. x 10. 1. 0.5. 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 圖 4-2 FEMET 與 CTMIE 之絕對誤差 (Cross port, Conventional design MMI case) 66. 200.
(73) (2) The new symmetric stepped-width design -3. 8. x 10. 7. Bar absolute error. 6 5 4 3 2 1 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-3 FEMET 與 CTMIE 之絕對誤差 (Bar port, New symmetric stepped-width design MMI case). -3. 4.5. x 10. 4. Cross absolute error. 3.5 3 2.5 2 1.5 1 0.5 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-4 FEMET 與 CTMIE 之絕對誤差 (Cross port, New symmetric stepped-width design MMI case) 67.
(74) (3) The symmetric parabolically tapered design 0.03. 0.025. 0.015. 0.01. 0.005. 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-5 FEMET 與 CTMIE 之絕對誤差 (Bar port, Symmetric parabolically tapered design MMI case). -3. 8. x 10. 7 6 Cross absolute error. Bar absolute error. 0.02. 5 4 3 2 1 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-6 FEMET 與 CTMIE 之絕對誤差 (Cross port, Symmetric parabolically tapered design MMI case) 68.
(75) (4) The symmetric tapered and stepped design -3. 8. x 10. 7. Bar absolute error. 6 5 4 3 2 1 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-7 FEMET 與 CTMIE 之絕對誤差 (Bar port, Symmetric tapered and stepped design MMI case). -3. 2. x 10. 1.8 1.6. Cross absolute error. 1.4 1.2 1 0.8 0.6 0.4 0.2 0. 0. 20. 40. 60. 80 100 120 Mode number. 140. 160. 180. 200. 圖 4-8 FEMET 與 CTMIE 之絕對誤差 (Cross port, Symmetric tapered and stepped design MMI case) 69.
數據


+7




相關文件
Cauchy 積分理論是複變函數論中三個主要組成部分之一, 有了 Cauchy 積分理論, 複變 函 數論才形成一門獨立的學科, 並且導出一系列在微積分中得不到的結果。 我們先從 Cauchy
推理論證 批判思辨 探究能力-問題解決 分析與發現 4-3 分析文本、數據等資料以解決問題 探究能力-問題解決 分析與發現 4-4
比較(可與不同時期、不同藝術家,對同類型/主題創 作的處理進行比較。例:Donatello的《David》)、分
因為我們的學員年齡層是大概 75~80 歲左右,那這些中高齡(老師)的來跟
•給學生很多的機會嘗試 比較不同物件的重量,鼓 勵學生表達兩件物件相對 的重量。.
本章將對 WDPA 演算法進行實驗與結果分析,藉由改變實驗的支持度或資料 量來驗證我們所提出演算法的效率。實驗資料是以 IBM synthetic data generator
我們分別以兩種不同作法來進行模擬,再將模擬結果分別以圖 3.11 與圖 3.12 來 表示,其中,圖 3.11 之模擬結果是按照 IEEE 802.11a 中正交分頻多工符碼(OFDM symbol)的安排,以
樹、與隨機森林等三種機器學習的分析方法,比較探討模型之預測效果,並獲得以隨機森林
