國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
汽車及機車於市區道路混合車流之行為模式
Driving Characteristics and Behavior Models of Cars and
Motorcycles in Mixed Traffic for Urban Arterials
研 究 生:王鴻傑
指導教授:黃家耀 副教授
汽車及機車於市區道路混合車流之行為模式
Driving characteristics and behavior models of cars and
motorcycles in mixed traffic for urban arterials
研 究 生:王鴻傑 Student:Hung-Chieh Wang
指導教授:黃家耀 Advisor:Ka-Io Wong
國 立 交 通 大 學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
A Thesis
Submitted to Department of Transportation Technology and Management
College of Management
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Transportation Technology and Management
July 2013
Hsinchu, Taiwan, Republic of China
i
汽車及機車於市區道路混合車流之行為模式
學生:王鴻傑 指導教授:黃家耀 副教授 國立交通大學運輸科技與管理學系碩士班摘要
國內市區道路混合車流以汽車、機車和公車為主要車種,台灣地區道路中的 機車數量龐大,微觀模擬軟體無法完整呈現國內機車在混合車流中之移動行為, 因此造成模擬預測準確性下降。本研究針對汽機車進行路段中的行為模式分析, 過去微觀混合車流研究受限於原始資料收集不易,但是近年來隨著影片拍攝設備 不斷進步,配合數位化的資料收集軟體也開始發展,本研究建立台北地區的混合 車流資料庫,並且以自動化的方式進行鄰近車輛與變換車道判斷,分析國內市區 道路為主體的混合車流駕駛特性與行為模式,可以協助改善市區道路模擬預測與 號誌控制效能,使整體市區道路路網更加順暢。 本研究針對小汽車進行變換車道模式之研究,以多項羅吉特模式建立小汽車 的變換車道決策模式,將直行、向左偏移、向右偏移作為主要的三種決策,主要 考量的變數為相對距離、相對速度、鄰車車種,本研究將本車速度也納入考量, 並且將前車與(左前車和右前車)分開校估。完成利用國內原始資料校估的小汽車 變換車道模式。並且以判中率來測試小樣本情況下的判中情形,整體判中率結果 為 70%;如果將樣本切割測試也有 63%的判中率。 本研究對國內市區道路的機車駕駛行為特性進行分析,觀察台灣機車的超車 與鑽車等特殊行為。為了瞭解在市區道路中的不同行為模式,將機車駕駛的鄰車 以鄰近區塊的方式來擷取不同周邊車輛資訊,用客觀的方式將不同的駕駛者類型 進行分類,使用 K-Means 分群法將機車駕駛人分成不同冒險程度的類型,利用 兩種分群參數來將不同號誌週期內的機車駕駛分群。型態 A 表示較激進的駕駛 者;型態 C 是較緩慢保守的駕駛者;型態 B 駕駛者較多,為介於兩者之間的機 車群。本研究將資料依照前方區塊影響情境 (Scenario 1,2,3)分開討論,可以判斷 不同對應車種對機車駕駛的影響,最後將所用來分群的資料點使用規則來判斷每 位駕駛者的駕駛型態。以 3 種情境和 3 種駕駛類型可以形成一 3×3 的分類矩陣, 矩陣內會對應不同的觀察機車移動行為,可以針對不同組合進行模式分析。 關鍵詞:微觀車流、混合車流、變換車道模式、市區道路、多項羅吉特模式、駕 駛行為ii
Driving characteristics and behavior models of cars and motorcycles
in mixed traffic for urban arterials
Student:Hung-Chieh Wang Advisor:Ka-Io Wong Department of Transportation Technology and Management
National Chiao Tung University
Abstract
The urban arterials in Taiwan are characteristics with a mixed traffic flow composed of cars, motorcycles, and buses. As the amount of motorcycles traveling on the road in mixed traffic is huge, the traffic simulation software developed in foreign countries does not have the capability to model the characteristics of traffic in Taiwan. As the simulation of motorcycles is unrealistic, the modeling results are usually inaccurate.
The aim of this study is to analyze the driving characteristics and behavior of cars and motorcycles in mixed traffic for urban arterials, which may shed some lights on the modeling and signal control design of urban network. A case study is done based on a selected site location in Taipei city. We collect traffic data by taking video of traffic movements, digitalize it into trajectories and movements of vehicles, and build a database for analysis. We formulate lane-changing of cars and motorcycles for urban arterials as a discrete choice model using multinomial logit model, considering the three decisions of a driver as moving to the left, going straight and moving to the right. The explanatory variables include relative distance, relative velocity, neighboring vehicle mode and the velocity of vehicle etc.
We also study the driving behavior of motorcycles, such as overtaking and filtering. Based on the dataset, it is observed that different motorcycle drivers may behave differently in mixed traffic, and there is a need to categorize the drivers for further analysis. We propose a concept of neighboring blocks to capture the nearby vehicles of a subject vehicle. With factors from neighboring blocks, a K-Means clustering approach is proposed to categorize the data and thus motorcycle drivers into three types (i.e. aggressive, normal, and conservative). The clustering is based on three scenarios that a subject vehicle is facing in mixed traffic (i.e. neighboring with
iii
motorcycles, cars, and buses). Therefore, the collected dataset can be categorized into a three by three matrix for the relationship of driver types and scenarios, and the results can help to realize the driving behavior of motorcycles.
Keywords: Microscopic traffic flow, mixed traffic, lane-changing model, urban arterials, multinomial logit model, driving behavior
iv
誌謝
在交大不知不覺已經過了六年時間,首先感謝黃家耀老師從畢業專題開始就 帶著我和小c做研究,在不同階段的過程中常常發生我們無法解決的問題,不論 是研究或者課外的難題,但是都跟著老師一步一步的克服了,回想起來歷歷在目, 讓我們兩個人在三年的過程中成長了不少。雖然所學知識和以後工作未必有直接 相關,但是在研究和做計劃案的訓練中讓人的抗壓性以及解決問題能力都無形中 增加很多,也讓我在交大有更刻骨銘心的回憶。口試委員吳水威老師平常上課就 傳授給大家很多經驗;李子璋老師在計劃案和論文都提供了很多的幫助與建議, 讓我們收穫良多。 另外首先感謝小c在這些年裡和我一起成長,不論是學術或者心理上,或許 是以前從大學開始就從小c那邊得到太多幫助,小c考上高普考的時候就變成一個 新的轉捩點,在做計劃案和研究的時候雖然常常壓力很大,但是有個同樣經歷的 夥伴會讓自己更有動力繼續往前,也變成我待在交大的重要回憶。 在做畢業專題時便受到小P學姊和冠豪學長的許多照顧,後來讓我選擇繼續 留在KI Lab,碩一時遇到了和我們同樣喜歡外食的朱志杰,Lab只有三個人的畫 面還是常常浮現在腦中,一起做計劃案也去了很多不同的地方,吃宵夜聊朱志杰 的感情世界也是大家津津樂道的共同話題。周律伶雖然因為工作在學校的時間比 較少,但是仍然和我們一起修了很多課,也常開車載大家出去。另外第一次見到 就被我們拉進Lab的安安,很快就習慣交大的生活,聊棒球看球賽的不二人選。 還有笑聲爽朗的劉穎文,常常和大家一起出去吃飯,一起當助教完全不讓人擔心, 祝能早日成為系上第一個畢業預修生。很愛回台北的劉雨薇,算是跟我們同屆的 同學,很愛旅遊還找大家半夜去青草湖聊天。新加入的羅峻庭、黃郁傑和張念盈 都是原本就在交大的學弟妹,每個人也都很有趣,還跟我們一起去墾丁玩。另外 要接手我們研究的李威,未來也會碰到許多困難但相信都可以克服。阿哲學長常 被我們麻煩問問題,但是忙亂之中還是認真的幫我們提供解決方法。另外吳承紘 和陳海齊雖然不是我們Lab的成員,但每次吃喝玩樂還是會想到要找你們,不論 是跨年或者去墾丁,謝謝大家讓原本煩悶的研究生活變得充滿回憶。 最後感謝家人在台北給予的默默支持,讓我可以無後顧之憂的在新竹求學, 來來回回的奔波了六年之久,還有太多人沒寫在上面了,真的謝謝大家。 王鴻傑 謹誌 2013 年 7 月 於新竹交大v
目錄
摘要... i Abstract ... ii 誌謝... iv 目錄... v 圖目錄... vii 表目錄... viii 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的 ... 2 1.3 研究範圍與方法 ... 2 1.4 研究流程 ... 3 第二章 文獻回顧 ... 4 2.1 加速度模式相關文獻 (Acceleration Models) ... 4 2.1.1 跟車模式 (Car-following Models) ... 42.1.2 一般加速度模式 (General Acceleration Models) ... 6
2.2 車道變換模式相關文獻 (Lane-changing Models) ... 6 2.2.1 小汽車車道變換模式 ... 7 2.2.2 機車行為模式 ... 9 2.3 接受間距模式相關文獻 (Gap Acceptance) ... 11 2.4 國內市區混合車流車道變換模式相關文獻 ... 12 第三章 影片收集與資料庫建立 ... 14 3.1 影片資料收集 ... 14 3.2 原始資料庫型態 ... 18 3.3 重要變數擷取 ... 19
vi 3.3.1 判斷車輛相對位置 ... 19 3.3.2 判斷車輛車道變換 ... 22 第四章 小汽車與機車車道變換模式 ... 24 4.1 小汽車車道變換模式 ... 24 4.2 機車車道變換模式 ... 27 4.3 小結 ... 30 第五章 市區道路機車移動行為分析 ... 31 5.1 市區機車駕駛特性 ... 31 5.2 機車駕駛分類 ─ 三種情境 vs. 三種駕駛類型 ... 33 5.2.1 三種情境 ─ 機車鄰近區域車輛判斷 ... 33 5.2.2 三種駕駛類型 ─ 機車駕駛類型分類 ... 35 5.2.2.1 K-Means 分群演算法 ... 36 5.2.2.2 分群參數 ... 36 5.3 機車駕駛 3×3 分類矩陣 ... 39 5.4 資料分群 ... 42 5.5 駕駛者分群 ... 48 5.6 小結 ... 49 六、結論與建議 ... 53 6.1 結論 ... 53 6.2 建議 ... 54 參考文獻... 55
vii
圖目錄
圖 3.1-1 影片拍攝路段位置─忠孝東路四段(紅色框線處) ... 14 圖 3.1-2 影片拍攝路段上游(左)與下游(右) ... 15 圖 3.1-3 路段四車道車輛時空圖(t=600~t=750) ... 17 圖 3.2-1 車流影片還原播放程式 ... 19 圖 3.3-1 資料庫型式整理與應用 ... 20 圖 3.3-2 本車與前車及後車相對位置示意圖 ... 21 圖 3.3-3 本車與左前車及左後車相對位置示意圖 ... 21 圖 4.2-1 機車變數說明 ... 28 圖 5.1-1 機車通過車陣穿越到前方 (本車號碼 #605) ... 32 圖 5.2-1 機車鄰近六個區塊範圍示意圖 ... 33 圖 5.2-2 機車情境判斷範例 ... 34 圖 5.2-3 秒數 n=1,2,3 分群圖與各秒數累積出現次數比較 (t=405~605) ... 38 圖 5.3-1 超車車輛與被超車車輛對應圖 (t = 5~205) ... 41 圖 5.3-2 超車車輛與被超車車輛對應圖 (t = 205~405) ... 41 圖 5.3-3 超車車輛與被超車車輛對應圖 (t = 605~805) ... 42 圖 5.4-1 資料分群結果 (號誌週期一)... 44 圖 5.4-2 資料分群結果 (號誌週期二)... 44 圖 5.4-3 資料分群結果 (號誌週期三)... 45 圖 5.4-4 資料分群結果 (號誌週期四)... 45 圖 5.4-5 資料分群結果 (號誌週期五)... 46 圖 5.4-6 資料分群結果 (號誌週期六)... 46 圖 5.4-7 資料分群結果 (號誌週期七)... 47 圖 5.4-8 資料分群結果 (號誌週期八)... 47 圖 5.4-9 資料分群結果 (號誌週期九)... 48 圖 5.6-1 不同類型駕駛行為說明 ... 51viii
表目錄
表 3.1-1 原始資料庫車輛資料筆數統計 ... 15 表 3.2-1 原始輸出資料項目說明 ... 18 表 3.3-1 車輛車道變換資料量統計 ... 23 表 4.1-1 小汽車車道變換模式變數說明 ... 25 表 4.1-2 小汽車車道變換模式測驗結果 ... 25 表 4.1-3 小汽車小樣本模式判中率 ... 27 表 4.1-4 小汽車小樣本模式判中率(資料切割)... 27 表 4.2-1 基本機車車道變換模式測驗結果 ... 29 表 5.3-1 三種機車駕駛型態 vs. 三種車種 ... 39 表 5.3-2 機車移動行為 3×3 矩陣案例 ... 40 表 5.4-1 九個號誌週期原始車輛數與資料筆數統計表 ... 43 表 5.4-2 九個號誌週期分群用車輛數與資料筆數統計表 ... 43 表 5.5-1 駕駛者分群比較(規則一 vs. 規則二) ... 491
第一章 緒論
1.1 研究背景與動機
在台灣市區道路,汽車和機車是用路人主要的交通工具,不同於國外的混合 車流由大型車輛和小汽車所組成,台灣的混合車流主要是以汽車和機車所構成。 台灣機車數量龐大,是全世界機車持有比例最高的國家,平均每兩人就有一台機 車。隨著台灣經濟的發展,雖然民眾更有能力購買小汽車,但是機車數量卻沒有 因此而減少。機車擁有許多難以取代的優勢,從便利性的觀點考量,在國內地狹 人稠的市區道路,機車可以鑽行於壅塞的車陣之中,避免塞車帶來的困擾,而且 在市區汽車停車位一位難求,機車的停車則相對容易許多。即使在大眾運輸方便 的台北地區,機車使用比例依然很高;而郊區大眾運輸的建設缺乏,民眾駕駛機 車則可以節省許多時間。從經濟面考量,機車的價格低廉而購買容易,在高油價 時代耗油量小負擔較輕。但是大量機車構成的混合車流亦有許多缺點,每年機車 車禍層出不窮,且機車排氣所造成的空氣汙染也造成許多環境危害。 台灣市區道路的混合車流行為模式深受機車特性所影響,汽車車道變換模式 與機車的行為模式也與國外不盡相同。過去微觀混合車流研究受限於原始資料收 集不易,但是近年來隨著影片拍攝設備不斷進步,配合數位化的資料收集軟體也 開始發展,有更多機會可以研究微觀的車流模式。建立以國內市區道路為主體的 混合車流行為模式,可以發展應用至國內開發之交通模擬軟體,並改善市區道路 模擬預測與號誌控制效能,使整體市區道路路網更加順暢。機車行為模式較汽車 更為複雜,且在市區道路變換車道不同於高速公路,還有公車等市區道路因素會 造成影響,駕駛者受到環境中更多的變數影響車道變換之決策,因此必須收集國 內的原始資料進行分析,才可以建構市區道路微觀混合車流之行為模式並且應用 與改善。 目前台灣各縣市交通單位與顧問公司都使用國外開發之交通模擬軟體,這些 交通模擬軟體主要是為了國外的車流環境所設計,將其應用至台灣市區道路無法 完全符合台灣混合車流之特性。並非全部的交通模擬軟體都有機車選項可設置, 國外交通模擬軟體之機車駕駛行為與國內機車騎士不同,因為國外機車駕駛鮮少 行駛於車縫中交織穿行;而台灣機車駕駛因應地狹人稠的特性,擁有鑽行於車縫 間或者對其他車輛快速超車等特殊的駕駛行為,且市區道路多有設置機車停等區 等特殊道路設計,直接使用國外交通模擬軟體常常會發生無法正確計算的現象。 因此需要對國內市區道路的汽機車混合車流進行駕駛特性及行為模式的研究。2
1.2 研究目的
1. 研究國內市區道路路段中的混合車流移動行為,進行汽車與機車的微觀車流 分析,收集國內原始資料建立資料庫,瞭解台灣混合車流之特性。 2. 針對小汽車建立變換車道模式,分析影響小汽車在路段中變換車道的變數, 完成符合國內市區道路之變換車道決策模式。 3. 分析國內機車車流特性,將機車駕駛分為三種不同的對應情境,並且以影片 資料客觀將機車駕駛型態分類,完成機車駕駛分類矩陣,可以針對不同對應 關係發展合適的機車行為模式。 4. 汽機車混合車流模式可以應用至微觀模擬軟體,增加模擬的準確性以及號誌 控制的效能。1.3 研究範圍與方法
本研究主要著重國內市區道路的汽機車混合車流,針對本車為汽車建立車道 變換模式與本車為機車發展分類矩陣。目前國外的車道變換模式大部分以高速公 路為主,這幾年來開始發展應用於市區道路,市區道路之組成因素較多,而本研 究則對台灣市區道路進行資料收集與分析,將公車等市區特有環境影響納入研究 考量。混合車流的行為模式針對機車的發展較少,歐美國家研究之機車駕駛行為 與台灣有差異,因此本研究致力於分析台灣之機車混合車流。車流理論涵蓋範圍 廣泛,本研究主要針對車道變換模式進行建構,暫不考慮跟車模式;且研究內容 以微觀車流為主,而非巨觀與中觀車流模式,著重於駕駛人在路段中的車道變換 行為,不涵蓋機車停等區與車輛路口停等。 本研究使用個體選擇模式判斷小汽車的車道變換,個體選擇模式應用於車道 變換模式可將駕駛人在不同時點下的車道選擇計算機率,其機率會依據不同的情 境下變數的改變而有所不同,最後依據機率最高的選擇判斷本車的車道變換行為。 為了建構微觀的車流模式必須先收集足夠的量化車輛資料,將小汽車為本車個別 校估模式,並且進行各種影響車道變換的變數擷取。個體選擇模式計算車輛選擇 直行、向左行駛、向右行駛的機率,最後判斷車輛行走方向與模式預期是否符合。 機車的行為分析則是將駕駛者依照不同的車輛對應關係,分為機車為本車來對應 機車、小汽車、公車的三種對應情境,將所收集的資料點進行分類,利用分群法 將機車駕駛人分成不同類型之冒險程度,完成機車駕駛之分類矩陣。3
1.4 研究流程
研究動機及目標 文獻回顧 影片收集與建立資料庫 研究方法與架構 機車駕駛特性分析 建立汽車變換車道模式 結論與建議 重要變數擷取4
第二章 文獻回顧
本章回顧微觀車流模式之研究方法,比較不同研究方法的差異與研究對象。 瞭解整體微觀車流模式包含車道變換模式的發展演進,進而討論國內市區道路混 合車流的適用性。2.1 節介紹加速度模式相關文獻,其中分為跟車模式與一般加 速度模式兩類。2.2 節介紹車道變換模式的相關文獻,並且區分為小汽車和機車 兩種不同的類型,此節為本研究所著重的微觀混合車流車道變換理論。2.3 節是 接受間距模式相關文獻回顧。2.4 節是國內市區混合車流行為模式文獻。透過循 序歸納整理目前微觀車流發展之情形,研究適合國內混合車流之研究方法。2.1 加速度模式相關文獻 (Acceleration Models)
依據車流理論可簡單分成三類:巨觀、中觀和微觀車流。本研究主要之探討 範圍是微觀混合車流,並且著重於汽車與機車的車道變換模式。微觀車流研究包 含加速度模式(Acceleration models),加速度模式可以分為跟車理論(Car-following models)以及整合性的一般加速度模式(General acceleration models)兩種類別。雖 然本研究沒有針對加速度模式進行混合車流研究,但是加速度模式仍然是微觀車 流須注意的重點。2.1.1 跟車模式 (Car-following Models)
跟車模式是描述車道上之車輛間互動關係,主要研究後車跟隨前車時的反應 行為,意即在車流行駛過程中,跟隨車輛將不斷地調整行車速度及與前車間距, 使其維持在安全距離。後車必須達到被前車影響之程度,且不能超車的情況下才 可能發生跟車模式。安全距離模式是描述跟隨車輛與前車輛所維持之動態關係, 在早期 Pipes (1953)認為每一位駕駛者與前行車輛維持的最短安全距離,為自身 車長加上一段與後車的速度 v 成比例之距離,且彼此呈線性關係。而後方的跟隨 車輛會與前車維持大約 1.02 秒的 headway。提出的模式如下:其中 Dn (v)表示車 輛 n 與前車的最短安全距離,Ln為車輛 n 的長度。 Dn (v) = Ln (1 + v/16.1) (1) 跟車理論中的重要基礎之一為刺激反應方程式,美國通用汽車公司希望研究 高速公路上用路人的駕駛跟車行為,GM 研究實驗室(Herman, 1965)、(Chandler, 1958)等學者進行了跟車的相關研究並且發展了一至五代的 GM 模式,而最基本 的刺激反應方程式可以用以下表示:5
Responsen (t) = Sensitivityn (t) × Stimulusn (t - τn) (2)
其中 t 表示觀測時間,τn表示駕駛 n 的反應時間。在描述前車與後車之間的 刺激反應可以將兩者分開討論,反應(sensitivity)表示後車駕駛因應前車狀況而產 生的加速或者減速行為,也就是加油門或者踩煞車的行為。刺激(stimulus)則是因 為前車與後車的速度差所產生,而後車駕駛需要反應時間來應對。 不同的學者不斷改進原始 GM 模式,也利用 GM 模式衍伸出許多不同類型 的跟車模式,GM 研究團隊最後發表了第五代的 GM 模式,整合了第一代到第四 代模式的演進,GM 模式假設跟車的刺激(stimulus)為前車的相對速度,也就是前 車速度減本車速度。而最常被大家使用的非線性基本 GM 模式由 Gazis (1961)所 提出如下: 𝑎𝑛(t) = α 𝑉𝑛(𝑡)β ∆𝑋𝑛(𝑡 − τ𝑛)γ ∆𝑉𝑛(𝑡 − τ 𝑛) (3) 其中𝑎𝑛(𝑡)和𝑉𝑛(𝑡)表示本車的加速度與速度;∆𝑋𝑛(𝑡 − τ𝑛)和∆𝑉𝑛(𝑡 − τ𝑛)則代表 前車和本車的相對距離與相對速度,α、β、γ 為需校估之參數。
Newell (1961)發表跟車行為的空間模式(Spacing models),空間模式假設駕駛 人對於前方車輛的反應為相對距離,而並非用相對速度。假設本車速度是一個和 前車距離有關的非線性方程式: 𝑉𝑛(𝑡) = 𝐺𝑛[∆𝑋𝑛(𝑡 − τ𝑛)] (4) 也可以用下列方程式表示, 𝑉𝑛(𝑡) = 𝑉𝑚𝑎𝑥[1 − exp ( −λ 𝑉𝑚𝑎𝑥(∆𝑋𝑛(𝑡 − τ𝑛) + 𝐷)] (5)
其中 Vmax為最大速度而 D 則代表最小的空間間距(spacing headway)、λ 也是表示
參數。Newell 用上述兩種方程式表示了駕駛的跟車行為,並且用空間距離指數 方程式來表達反應方程式。作者也研究此模式的巨觀屬性,但是並沒有校估最終 參數結果。
Wiedmann (1974)提出了心理與空間模式跟車模式(Psycho-physical models)。 此模式改善只用速度差來反應的模式,假設即使兩車間的速度差非常小,前車依 然會影響後車的駕駛行為,作者從駕駛人的心理切入,並且依照不同的刺激程度 作反應。利用心理門檻的概念把駕駛者分為自由駕駛與受迫駕駛,當後車駕駛對 於速度差異的感知門檻值越大就代表越容易受到前車速度所影響,因此可能會產 生變換車道的行為。
Brackstone and McDonald (1999)進行了跟車理論的文獻整理,說明跟車理論 在近年來逐步提高的重要性,可以應用至模擬軟體之中,並且增強先進車輛控制
6
與安全系統(AVCSS),分別介紹了五種跟車模式的演變:Gazis-Herman-Rothery (GHR) model、Safety distance or collision avoidance models (CA)、Linear (Helly) models、Psychophysical or action point models (AP)以及 Fuzzy logic-based models。 Gipps (1981)提出了可以適用於跟車條件和自由駕駛條件兩種情境下的模式。 此模式必須在駕駛保持安全間距下才成立,也就是在前車緊急煞車時的最短避免 追撞距離,可以利用方程式推斷出下一秒的速度,結合兩種情境而非傳統只有考 慮跟車行為的模式。後續學者們也開始針對不僅是跟車模式的研究,而著重於可 同時考慮不同情況下的組合模式,例如同時考慮跟車與車道變換的一般化模式。
2.1.2 一般加速度模式 (General Acceleration Models)
微觀模擬必須捕捉各種駕駛人之行為,因此也會大量增加電腦運算使用。 Nagel (1992)等人發展細胞自動機模式(Cellular Automata (CA) Models)。CA 模式 可以使得電腦使用更有效率,其作法是將車輛當成在整體系統中占用道路網格的 細胞,不同的車種會依照其不同的長度設定由不同數量之細胞組成,因此系統中 的網格可以是被占用也可以是空的,車輛會依照模式的規則與鄰車作用,使得 CA 格位化更新,也就是車輛會依據前方車輛間距等外在條件進行橫向與縱向的 移動,也可以照側向車道的變換進行水平移動,在不同的時點下不斷更新車輛的 位置。Nagel 等人提出的細胞長度為 7.5 公尺,車輛從一個單位移動到另外一個 單位總共有加速、減速、損失這三個步驟,其中損失代表輸入一個機率讓車輛會 自動地降低車速。 藍武王、張瓊文 (2004)研究機車的跟車行為特性,構建機車的跟車模式, 採用影片資料收集的方式,研究發現機車跟車的比例僅佔全部樣本的 13.8%,發 現機車的相對速度差、與前車的間距、前車加速率係影響後車(機車)跟車加速率 之顯著影響。並且使用通用跟車模式(GM),並且發展適應性類神經模糊推論系 統(ANFIS),其研究結果 RMSE 較 GM 的配適度更佳,說明使用 ANFIS 描述機 車的跟車行為。
2.2 車道變換模式相關文獻 (Lane-changing Models)
不同於加速度模式和跟車模式,車道變換模式不僅考慮後車的行為,前車亦 可能被後車所影響,因此交互關係更加複雜,故發展的時間也相對較晚。目前國 外的車道變換模式研究多以小汽車為主,且主要的研究範圍多著重於高速公路之 駕駛行為,而本研究主要針對台灣市區道路之混合車流,因此除了對於小汽車的 車道變換模式進行文獻回顧,也參考機車的車道變換模式研究。7
2.2.1 小汽車車道變換模式
微觀車道變換模式依照研究方法可以簡單劃分成為兩類:決策結構模式 (Rule-based models)和個體選擇模式(Discrete choice-based (DCB) models)。決策結 構模式從個別駕駛者的觀點著手,考慮從目前行駛車道轉換至目標車道的眾多可 能影響原因,將駕駛者考量該原因後的決策做為一決策流程,最後判斷是否決定 變換車道。個體選擇模式使用羅吉特或者普洛比分析,選擇可能影響車道變換選 擇的變數,並且校估參數。個體選擇模式的駕駛者決策可以是二元選擇或者多選 擇,各選擇的效用將被計算出來,並且求出選擇不同車道變換的機率。使用這兩 種模式在駕駛者做出決策後,必須用接受間距(Gap acceptance models)判斷能否變 換車道,而接受間距的參數將由原始車輛資料校估求算。 Gipps (1986)首先提出車道變換決策模式以應用於交通模擬,此模式研究對 象設定為市區道路,用邏輯性的結構判斷駕駛者決策,分析最後是否產生車道變 換行為,為一標準的車道變換決策結構模式。決策的問題可以概分為客觀性問題 與主觀性問題。模式決策流程中使用許多二元問題選擇,問題的答案是或否將影 響下一步驟的決策流程,決策流程不斷進行直到完成車道變換才結束又重新開始。 其中有三個重要的因素影響過程:可行性、嚮往性和安全性。問題涵蓋影響駕駛 者進行變換車道決策的影響因素,首先判斷駕駛者欲變換的目標車道,接著開始 決策流程的一連串問題:利用跟車模式判斷變換車道是否可行,接著問駕駛是否 接近欲轉彎路口、判斷是否行駛於大眾運輸車道、大型車輛影響等問題,最後即 可利用以上二元問題的答案,決定駕駛者變換車道的決策。不過最後並未提供正 式的參數校估模式。
Yang and Koutsopoulos (1996)提出高速公路車道變換模式,此模式並建置於 MITSIM 內。將車道變換模式概分為兩種類型:被迫變換車道(MLC)和任意變換 車道(DLC)。駕駛者在前車速度低於期望速度,而鄰近車道有機會增加速度時會 考慮任意變換車道(DLC)。研究中亦發展接受間距模式,在被迫變換車道(MLC) 條件下的接受間距,會小於任意變換車道(DLC)條件下的接受間距。且研究中指 出若駕駛匯入車道,必須在與前車和後車的間距都被接受的情況下才可以發生。 然而此研究亦未提供正式的參數校估模式。 Ahmed et al. (1996)採用個體選擇模式用於車道變換模式,先後發展 MLC 與 DLC 之車道變換模式。將車道變換分為三個步驟:考慮變換車道、目標車道選 擇、目標車道接受間距。研究先在美國巴爾的摩地區高速公路進行 MLC 的特殊 情境測試,選定高速公路匯入車道路段,判斷本車與左車道的左前車與左後車間 距,本車必須在同時接受左前車和左後車間距才會發生被迫變換車道(MLC),總 共收集了 286 輛汽車資料。後來發展任意變換車道(DLC)模式,選定美國波士頓
8 快速道路,收集四車道車輛資料,觀察中間兩車道的小汽車直行與向左切換車道 行為,研究著重於駕駛任意變換車道行為(DLC),最後利用接受間距來判斷車輛 是否向左切換車道,總共收集 843 輛汽車資料,共 4335 筆資料。DLC 之研究涵 蓋本車道與切換至左車道的觀念,並且使用羅吉特模式校估,選用了與速度差有 關的基本變數,建立一有參數校估之個體選擇模式。此研究的 DLC 選擇為二元 羅吉特模式:行駛本車道或者向左行駛左車道,尚未考慮到向右行駛右車道。 Toledo et al. (2007), (Toledo, 2007)採用個體選擇模式的研究方式,建立整合 MLC 與 DLC 之目標車道變換模式,同時考慮本車車道、向左行駛左車道、向右 行駛右車道三種選擇,建立多項羅吉特模式。原始資料來自於美國維吉尼亞州長 997 公尺的四車道高速公路,共 442 輛汽車資料,共計 15632 筆資料。此整合駕 駛行為模式一開始必須先判斷車道選擇,根據三種行駛方向建立多項羅吉特模式, 使用最大概似法校估參數,並擷取可能影響駕駛車道選擇之解釋變數,選擇之變 數不僅限於距離或速度之觀念,另外加入了車道密度、變換車道數等新解釋變數, 而變數的擷取主要著重於與前車的關係,與鄰後車的距離和速度差則沒有考慮放 入。車道選擇完成之後,依然使用接受間距模式進行下一步。此研究另外加入了 目標車道間距模式和加速度模式,以此兩種模式接續接受間距模式,待四種模式 完成後,組合為小汽車整合駕駛行為模式。 Choudhary et al. (2008)開始將個體選擇模式應用至市區道路,在四車道的市 區道路上選擇外側第二車道,判斷該車道的三種車道選擇行駛方向,而不考慮最 內側車道。資料收集地點來自於美國加州洛杉磯,道路長度 488 公尺,收集 400 輛汽車資料,共 16696 筆資料。研究方法架構與麻省理工大學團隊先前的研究接 近,判斷完車道變換選擇之後,用最大概似法校估參數,並採用接受間距檢視, 最後的行動則為變換車道或者不變換車道兩種。因應市區道路特性,模式解釋變 數擷取考量路徑規劃影響,例如目前車道距離欲轉向路口車道數和距離、前方車 輛延滯等市區道路特性。研究之模式如同 Yang and Koutsopoulos (1996)一樣套入 MITSIM 模擬軟體使用,並用總體交通資料比較改善程度。而此研究針對市區道 路建構微觀車流模式,但是並未考慮公車站和行人等市區道路影響因素,而模式 的績效仍待後續確認。
Sun and Elefteriadou (2012)不同於 Ahmed、Toledo、Choudhury 等人的研究方 法,對市區道路車道變換模式提出不同的情境分析模式,建構兩階段的巢式羅吉 特模式架構。將駕駛者的變換車道決策視為規劃階段,變換車道決策可以分為嘗 試或完成變換車道與未完成變換車道 2 個流程,若嘗試或完成車道變換則可用接 受間距判斷。間距是否接受並變換車道則可視為行動階段。研究方法不同於影片 拍攝的資料收集方式,而是先設定了 6 種不同的駕駛情境,並且雇用 40 位駕駛 實際開車,由駕駛身旁的觀察員紀錄駕駛的行為 (Sun and Elefteriadou, 2012),並 且藉由問卷調查的方式將駕駛者分為 4 種類型 (Sun and Elefteriadou, 2011),依據
9 駕駛者變換車道的強烈程度區分。而實際開車時觀察員紀錄的車道變換可分為三 種:潛在車道變換、嘗試車道變換(但未成功)、完成車道變換。因此可以用 3 種 車道變換情況與 4 種駕駛類型做為 3×4 的組合分析。 研究分了 6 種類型的駕駛情境分析,將車道變換選擇視為二元羅吉特模式。 (1 表示駕駛嘗試變換車道或者駕駛完成變換車道;0 表示駕駛未完成變換車道) 針對 6 種情境分別擷取不同的變數,並且校估參數留下通過之變數。研究中分類 的 6 種市區道路駕駛情境分別如下:(1)行經停在公車停靠區之公車 (2)避開匯入 原本行駛車道之車輛 (3)加速超越前方速度較慢車輛 (4)行駛至路口處延滯較少 的車道 (5)避開卡車與大型車輛的影響 (6)避開後方跟車車輛。如果二元羅吉特 結果是 1,就開始採用接受間距測試,接受者便可判斷為最後完成車道變換。 Hidas (2005)進行車輛交會的微觀模擬,其作法也是利用影片拍攝的方式, 此研究之模式不僅用於一般道路的車道變換交織,也可以用在道路之匯流情況。 作者利用間距(m)和速度差(m/s)歸類整理了三種車道變換之情形:
(1) 自由車道變換 (Free lane change):此種車道變換模式並沒有特別可以觀察的 現象,駕駛人憑自己的意識進行車道變換。
(2) 受迫性車道變換 (Forced lane change):指當車輛變換車道進入所欲變換之車 道時,會使得後方之車輛被迫得減速讓行。
(3) 合作性車道變換 (Cooperative lane change):指當後方車輛看到有車輛要變換 到該車道時,會自動放低速度讓其變換車道至前方。 作者最後整理成一決策結構模式(Rule-based models),並且將其模式套用至 ARTEMiS 交通模擬軟體中。
2.2.2 機車行為模式
Lee et al. (2009)指出機車在許多國家的市區道路混合車流佔有重要的影響力, 但是在目前的車流理論與模擬軟體中卻鮮少被提出,針對英國的汽機車混合車流 提出機車的移動行為分析。研究提出了兩個不同的時距模式:(1) 直向時距模式 (Longitudinal headway model):將機車駕駛與前車互動避免撞 車的情況分為減速不偏移(6)與偏移避開前車(7)兩種類型,並且分別提出其最小 跟車距離: ∆𝐷𝑢𝑛𝑠𝑤𝑒𝑟𝑣𝑖𝑛𝑔 = 𝑑 𝑛− 𝑑𝑛−1 = 𝑣𝑛τ− 𝑣𝑛2 2𝑏𝑛+ 𝑣𝑛−12 2𝑏̃𝑛−1 (6) 其中 n 表示車道中第 n 輛車;n-1 表示 n 車的前車;𝑑𝑛表示 n 車的停止距離;𝑣𝑛表示 n 車的起始速度;𝑏𝑛表示 n 車在不偏移情況下的剎車減速度;𝑏̃𝑛−1表示 n-1 車的
10 推測減速度;τ表示反應時間。 ∆𝐷𝑛𝑠𝑤𝑒𝑟𝑣𝑖𝑛𝑔 = ∆𝑣𝑛(τ + 𝑑𝑤 𝑣𝑤) + 1 2(𝑏́ − 𝑏̃𝑛 𝑛−1) ( 𝑑𝑤 𝑣𝑤) 2 −1 2𝑏̃𝑛−1τ(τ + 2𝑑𝑤 𝑣𝑤 ) (7) 其中∆𝑣𝑛表示速度差;𝑑𝑤表示橫向移動距離;𝑣𝑤表示橫向移動速度;𝑏́表示偏移 時的剎車減速度。 機車駕駛所保持的最小直向跟車距離可以表示為 min{∆𝐷𝑢𝑛𝑠𝑤𝑒𝑟𝑣𝑖𝑛𝑔, ∆𝐷 𝑛𝑠𝑤𝑒𝑟𝑣𝑖𝑛𝑔}
(2) 斜向與橫向時距模式 (Oblique and lateral headway model):描述機車駕駛斜向 與側向跟車時的安全間距,在這種情況下無法計算時距,因此必須建立迴歸模式。 但是此模式必須滿足一特定無異線之假設,無異線是由本車機車與斜前方車輛的 直向間距和橫向間距所計算,假設駕駛者在該線上會維持同樣滿足程度,並且考 慮跟車角度以完成模式校估。
(3) 機車車道選擇模式(Path choice model):將駕駛分為向左行駛、直行、向右行 駛三個選擇的多項羅吉特模式。不同於小汽車的行駛車道,機車駕駛並沒有明確 的車道觀念而是以虛擬車道取代,因此三種選擇效用函數所擷取之變數也和小汽 車不盡相同。原始資料收集的方式是利用影片拍攝,地點選在英國倫敦市區道路, 影片拍攝時間為 17:00-18:00,利用軟體收集影片中車輛量化資料,共 42711 筆資 料,2109 輛車。機車駕駛行為較汽車更為複雜,變數擷取除了前方車輛速度, 考量機車具有駕駛靈活的特性,機車可以較容易切換車道,因此鄰近車輛間的距 離也必須納入變數。而為了更精準的預測機車行駛方向,包含機車行駛角度的變 化量、鄰近車輛大小等汽車未考慮因素,在此研究中都放入羅吉特模式之變數。 校估參數後刪除不顯著之變數,完成具英國機車駕駛特性的車道變換選擇模式。 Lee et al. (2011)描述市區道路的混合車流機車駕駛模式,利用量化數據分析 機車跟車距離、速度、加速度與減速度,發現機車的安全間距較小,跟車距離服 從 lognormal 分配;機車速度服從常態分配,但汽車並沒有;機車的加速度與減 速度較汽車變化劇烈,因為其體積較小且重量較輕。 本篇研究以英國倫敦地區為研究區域,英國之機車駕駛行為與台灣地區不同, 英國的機車駕駛觀念類似駕駛小客車;國內的機車駕駛則擁有鑽行和超車等不一 樣的行為特性,比較東西方的開車習慣,受到駕駛觀念不同和機車密度差異等影 響,擷取不同的變數也會呈現出不同的結果。此研究利用個體選擇模式的研究方 法,並針對英國地區特性擷取變數,用多項羅吉特模式的路徑選擇模式, 首先 將個體選擇模式方法應用至市區混合車流機車駕駛行為。
11
2.3 接受間距模式相關文獻 (Gap Acceptance)
接受間距(Gap acceptance)原本是用於解釋交叉路口的錯綜行為,現在也被用 於車道變換模式,其檢視目標車道的前車與後車之間的間距(Gap),因此可以將 接受間距視為一個二元選擇問題,駕駛者會比較目標車道前後車之間的可行間距 (Available gap)和臨界間距(Critical gap),臨界間距也就是最小的可接受間距,判 斷是否接受,若大於鄰界間距代表接受,車輛可以變換車道;小於臨界間距則被 拒絕無法變換車道。臨界間距可藉由選取之解釋變數模型化為隨機變數並且服從 lognormal 分配以確保為非負值。 𝑌𝑛(𝑡) = {1 𝑖𝑓 𝐺𝑛(𝑡) ≥ 𝐺𝑛 𝑐𝑟(𝑡) 0 𝑖𝑓 𝐺𝑛(𝑡) < 𝐺𝑛𝑐𝑟(𝑡) (8) 其中 n 為駕駛者,t 表示時間。𝑌𝑛(𝑡)為指標變數,如果為 1 的話表示接受間距; 為 0 表示拒絕間距。
Daganzo (1981)提出了架構以掌握臨界間距(critical gap)隨時間的變化。使用 普洛比模式(Probit model)預測接受間距參數,利用駕駛者從支線道路匯入主線道 道路進行校估。駕駛者 n 在時間 t 的臨界間距可以用下列方程式描述: 𝐺𝑛𝑐𝑟(𝑡) = 𝐺 𝑛+ 𝜀𝑛𝑐𝑟(𝑡) (9) 其中𝐺𝑛 =駕駛者 n 的臨界間距;𝜀𝑛𝑐𝑟(𝑡)為同一駕駛不同間距和不同駕駛之隨機項。 𝐺𝑛和𝜀𝑛𝑐𝑟(𝑡)假設為互相獨立,並且假設𝐺 𝑛~N(G,𝜎𝐺2)且𝜀𝑛𝑐𝑟(𝑡)~N(0,𝜎𝜀2)。
車道變換的個體選擇模式最後必須採用接受間距模式(Gap acceptance model) 衡量是否可以變換車道。接受間距主要被本車與目標車道的前後車空間關係所影 響。且必須要在與目標車道前車和目標車道後車兩者間距都被接受的情況下,駕 駛者才會產生變換車道的行為。Gipps (1986)和 Ahmed (1996)皆指出駕駛人會分 開考慮與目標車道前車的間距(lead gap)和目標車道後車的間距(lag gap),必須要 兩個間距都被接受才會產生變換車道的行為。此外 DLC 與 MLC 情況下的 lead critical gap 與 lag critical gap 會不同:在 MLC 情況之下的間距會比 DLC 情況下 來較小。Ahmed (1999)發展了強制性併入車道模式,駕駛人可能會較有禮貌的等 待目標車道後車;也可能不管目標車道後車情況強行變換車道。Hidas (2005)則 發展了三種車道變換情況,並且解釋了受迫性車道變換與合作性車道變換的差異, 其研究方法是針對接受間距做一完整的資料收集與圖形判斷。
12
2.4 國內市區混合車流車道變換模式相關文獻
何佳娟 (2001)以新竹市光復路(建功路口至金城一路口)路段進行微觀汽機 車混合車流研究,分別考量路段車流行為與鄰近路段車流行為。而路段車流行為 主要研究變換車道行為,駕駛人變換車道必須考慮三個條件:(1)與本車道前車 之關係。(2)與期望車道前車關係。(3)與期望車道後車關係。當三者關係同時符 合時才可以變換車道。與本車道前車的關係主要是考慮偏向角,當與前車的偏向 角大於與目標車道前車的偏向角時才可以成立條件,並且將前車車種的觀念導入。 與期望車道前後車關係主要考量必須大於動態安全間距即成立條件,將變換車道 行為以流程圖表示判斷。提出機車的鄰近車道為機車本身之靜態車寬加上動態側 向間距觀念。此研究選擇的光復路樓房較矮,攝影拍攝範圍僅能到達 12 公尺, 難以掌握路段中機車的連續移動過程。 張維翰 (2006)針對郊區路段微觀混合車流進行特性研析與模式建立。也是 利用攝影拍攝的方式,選定新竹中興路四段二車道,約 100 公尺的拍攝範圍。將 混合車流模式分為跟車模式與車道變換模式。其中跟車模式是以適應性類神經模 糊推論系統構建郊區的模式;車道變換模式則是分為變換車道的行為準則與偏向 角模式兩種。車道變換模式依據本車為汽車和機車分為兩種不同的情況:如果本 車為汽車的話,考量前車為機車的情形,並且將目標車道分為沒有車輛、有前車、 有後車、有前車和後車四種不同的情境。其主要的考慮變數為偏向角,另外也考 慮了本車速度、本車與鄰車的距離差與速度差、還有前方機車距右側車道緣等不 同的變數。本車為機車另外考量了本車與前車的相對縱向距離與相對橫向距離, 以變換行向代表機車變換車道之行為。 最後研究結果顯示在郊區(本車為汽車、前車為機車)之變換動機為本車車速 大於前車車速 1.5m/sec 以上、本車與前車相對距離小於 15.6 公尺。本車為機車 變換行向(本車為機車、前車為汽車 )之變換動機為本車車速大於前車車速 1.1m/sec 以上、本車與前車相對距離小於 14.1 公尺。 張正達 (2012)研究機車在低速情況下的運動推進模式,將研究範圍限制於 鄰近路口與紅燈號誌為條件,研究機車在停止車陣中的低速鑽隙行為。研究中將 機車的前方與左右方劃分為 14 個不同大小的格子,機車駕駛有三種方向選擇: 左前方、前方、右前方。將 14 個格子的變數輸入,將數據資料格子化判斷機車 駕駛在緩慢移動時的方向選擇,並將心理因素的領地效應加入變數中,建構機車 推進距離的準則。但是此研究並不適用於路段中高速行駛的機車駕駛,且必須將 影像畫面劃分為格子才可進行。13 許添本、韓復華 (2011)進行交通技術研發與人才培育規劃研究(2/4),針對國 內混合車流進行了完整性的研究。其中包含跟車模式、錯車模式、強制型變換車 道模式、接受間距模式四項主要車流模式的初步建構。原始資料收集的方式是利 用高樓影像拍攝,將影片畫面依照每 0.5 秒一張(frame)的方式收集車輛座標,並 以人工分組的方式將本車與鄰車的關係分為許多不同的分組類型進行研究。許家 齊 (2012)研究中發現兩車的側向偏移量對於機車的縱向跟車有很大的影響,側 向偏移量越大會造成縱向間距越小,並且首度引入馬可夫模式於混合車流環境中, 結合行為門檻模式之感知分界,駕駛人在不同的感知狀態可用不同之加減速模式 做推進。李健豪 (2012)利用多項羅吉特模式進行超車行為路徑選擇決策模式, 分別以汽車為本車和以機車為本車校估參數。小汽車為本車考量的主要變數有距 離差和車速差。機車為本車則加入了錯車距離、前一秒側向偏移量等新變數,而 機車的選擇共有五種:跟車、向左錯車、向右錯車、向左偏移跟車、向右偏移跟 車。最後利用判中率來檢視結果。
14
第三章 影片收集與資料庫建立
本章節介紹微觀混合車流研究使用的原始資料庫。第一節介紹市區路段影片 的收集,以及如何將影片車輛軌跡數位化並建成資料庫。第二節介紹原始資料庫 的型態與整理。第三節介紹影響車道變換的重要變數擷取:其中包含如何判斷不 同車輛間彼此的相對位置、如何判斷車輛進行車道變換、以及本研究的車道變換 模式介紹。3.1 影片資料收集
本研究的原始影片來自許添本、韓復華 (2011)的交通技術研發與人才培育 規劃研究中所拍攝的 30 分鐘路段畫面。然後利用此影片畫面自行進行車輛點擊, 並完成原始資料的收集與資料庫建立。進行微觀車流的車道變換模式研究,首先 必須拍攝市區道路影片。拍攝影片選擇的路段是台北市忠孝東路四段西向車道, 接近忠孝敦化路口之路段。此路段共四個行車道,拍攝畫面涵蓋公車停靠站,路 段總長度約 170 公尺,影片拍攝時間為早上尖峰時段。拍攝的方式是利用在路段 旁邊的高樓進行高空攝影,共架設兩台攝影機同時間分別錄影,之後再將兩台攝 影機所拍攝的上游與下游路段影片資料合併分析。 圖 3.1-1 影片拍攝路段位置─忠孝東路四段(紅色框線處) 拍攝完路段的影片後,必須進行數位化的資料庫建構,本研究採用 Lee et al. (2008)所開發的車流軌跡讀取程式,使用此程式將影片中所有車輛在不同時間點 的位置進行量化收集。首先開啟兩個車輛軌跡收集程式,將所拍攝的 30 分鐘路 段影片依照上游和下游各別讀入程式。在開始收集之前必須將影片畫面的座標轉 換為事先測量之路段座標位置。從第一輛車開始點擊車尾中點收集每秒鐘的車輛15 x , y 座標位置,每點擊一下車輛尾部,影片畫面便會自動跳到下一秒鐘,也就是 影片的 frame 數會以每 30 張為固定間距跳動,而當車輛移動到下游的畫面時, 必須配合影片的連續秒數點擊,使得上下游同一車輛的移動軌跡為一完整的時間 序列而不間斷,分別用兩個程式所收集的資料可以合併成為一完整的資料庫。完 成一輛車的軌跡資料收集後即存檔使畫面返回,並且開始收集下一輛車的軌跡資 料,連同路邊停等之車輛也一起點擊,直到影片長度內的所有車輛資料收集完畢 為止。 圖 3.1-2 影片拍攝路段上游(左)與下游(右) 在收集的同時也將不同大小的車種進行分類,包含一般小汽車、機車、公車、 小型巴士、計程車等不同車種類型。存檔完畢的原始資料庫會將各車輛的車輛位 置以車頭中點座標記錄下來,程式會計算資料上一秒與下一秒位置之間的角度, 並且利用不同的預設車種長度與寬度,計算出該時間點下車輛的左前方、左後方、 右前方、右後方四點座標位置。同時擁有車輛的車頭中點座標位置和四點座標位 置可以進行更深入的變數擷取與研究。 使用程式收集可以在點擊完一輛車後,將時間點跳至所欲點擊時間,將尋找 車輛畫面的時間大幅縮短。但是收集上下游路段 30 分鐘影片,單人點擊仍至少 需要 30 小時的作業時間,最後影片建立之 30 分鐘原始資料庫共 34498 筆車點資 料,1660 台車輛資料。此資料庫將作為後續的變數擷取以及模型建立使用,並 且可以將檔案匯入 Excel 進行更多的分析使用。 表 3.1-1 原始資料庫車輛資料筆數統計 車種 機車 小汽車 計程車 小型巴士 公車 總計 資料筆數 (筆) 12311 (36%) 10404 (30%) 8207 (24%) 101 (0%) 3475 (10%) 34498 車輛數 (輛) 818 (49%) 564 (34%) 206 (13%) 3 (0%) 69 (4%) 1660
16 各車輛在不同時間點的關係除了利用影片還原程式檢查之外,也可以依據原 始資料庫所收集的資料進行時空圖比較,藉由時空圖可以同時比較不同車輛在一 段時間內的軌跡變化,而以下是依照四個不同的行車道進行劃分,所畫出來的時 空圖關係比較,車道 1 至車道 4 分別為最內側車道到最外側車道,由於上游路口 有紅綠燈號誌,故選擇 t=600 至 t=750(秒)的綠燈時段作圖比較。分別與左邊車道 示意圖做比對,可以觀察在該路段不同位置的距離變化量。 以下四張圖分別表示四個車道的時空圖,其中小汽車:實體三角形、計程車: 空心三角形、機車:圓形、公車:方形。而最外側車道(Lane4)因為在該時段路 邊停靠了三輛計程車,故僅有少數公車和汽機車資料點。
17 圖 3.1-3 路段四車道車輛時空圖(t=600~t=750) 論文研究限制:本研究的影片上下游接合點如上圖 3.1-3 所示,在影片的接 合處資料點(約路段 40 多公尺處)產生接合誤差,其主要之影響在於車輛的橫跨 影片 X 移動量,所計算有偏誤的 X 移動量也會影響速度,因此本研究針對該接 合時點之車輛資料進行速度資料修補,以該點的前一秒時點資料與下一秒時點資 料進行速度平均。對於 Y 座標的車輛橫向移動並沒有影響,後續分析所使用到 的 X 移動偏移量也會利用所修補完成的速度資料來進行填補修正,所以使用的 分析資料將可以避免上圖中接合點產生的誤差。
18
3.2 原始資料庫型態
原始資料庫是點擊影片車輛所記錄的所有車輛資料。包含每輛車的車輛編號, 以及在不同時點(秒)下該車的車輛座標位置、速度、加速度、角度等原始資料項 目輸出所構成。此作法將原始資料庫的讀取人員與使用資料的分析人員可以獨立 分開,也就是分析人員可依照各自喜好擷取所需要的變數,或者進行更複雜的資 料分析,採用客觀的資料數據,而非依照車輛讀取人員的個人喜好決定車輛組合, 原始檔案輸出資料如下表所示。 表 3.2-1 原始輸出資料項目說明 vehicle_number 車輛編號 vehicle_type 車種 vehicle_length 車長(m) vehicle_width 車寬(m) video_frame 圖片編號 screen_x 畫面 X 座標(車頭中點) screen_y 畫面 Y 座標(車頭中點) real_x 實際 X 座標(車頭中點) real_y 實際 Y 座標(車頭中點) distance 與前一秒的距離(m) speed 速度(m/sec) acceleration 加速度(m/sec2) theta 角度 讀取人員在點擊資料時可能產生人工失誤,若要檢測點擊完成的資料庫是否 與實際影片資料相符合,可以利用影片還原程式(Lee et al., 2008)檢視。影片還原 程式將所點擊完的原始資料庫讀入,還原播放時呈現每個時間點下的車輛位置, 若連續點擊播放按鍵則可以視為車輛的移動軌跡,藉此可以檢查是否有可疑或錯 誤的資料收集,也可藉由車輛編號還原該車輛當時的移動情形,並以圖形化播放 來呈現,也可以降低錯誤的發生率並提高檢測的效率。19 圖 3.2-1 車流影片還原播放程式 而收集原始資料時常常會發生一些設定上的錯誤,例如最常發生的座標轉換 設定錯誤,若發生此種錯誤則所有資料庫的座標位置都會錯亂,所推算出來的速 度與加速度也會有誤,但是重新點擊需要花費大量的時間,因此將程式加了錯誤 修正的功能,若發生座標設定錯誤的情況可以不必重新點擊影片資料,而只要將 影片座標與實際座標重新轉換運算,程式即會將所有時點的座標位置更正。另外 在點擊影片資料時,由於車種的判斷是人工方式,故有可能發生按錯車種的問題, 發生此種錯誤也可以在錯誤更正程式中直接改變該車輛編號的車種,利用角度和 車種的長寬重新計算四點座標位置。最後在點擊時可能因為人為疏忽產生車輛的 偏移角度不正常情況產生,也可以針對該時點的錯誤資料進行角度修正。以上的 錯誤更正程式功能可以降低使用者重新點擊的成本,並且有效提高原始資料庫的 正確性。
3.3 重要變數擷取
分析國內市區道路的小汽車車道變換模式,將資料庫中的本車資料為小汽車 先進行篩選,然後使用程式將小汽車車道變換模式中所需要的變數擷取。小汽車 車道變換模式過去文獻主要注重高速公路,本計畫探討的對象為國內市區道路的 混合車流,因此影響本車小汽車的車種不僅只有小汽車,也涵蓋機車和公車等不 同類型的車輛。3.3.1 判斷車輛相對位置
研究混合車流中車輛彼此之間的交互關係,首先必須將原始資料庫依照車輛 位置判斷標準分類,分成前車、左前車、右前車、後車、左後車、右後車的六種 原始資料關係。再依據這些原始資料進行變數擷取的步驟,而變數擷取依照不同 車種可以使用不同的變數,使用程式功能將變數依每秒每筆資料排序,整理為後 續模式建立需要的形式。20 由於資料量大,判斷車輛相對位置目前採用自動化的方式,依據汽車與機車 設定不同的規則做不同的分類方式如下: 假設: t = 時間(秒) i = 本車; li , wi 表示車長與車寬 j = 鄰車車輛編號 xit , yit = 車輛 i 在時間 t 的座標位置 (車頭中點) 圖 3.3-1 資料庫型式整理與應用 鄰車計算定義(6 種方向): Fit , LFit , RFit , Bit , LBit , RBit 表示車輛編號 i 在時間 t 的前車、左前車、右前車、 後車、左後車、右後車。目前判斷方法: 小汽車前(後)車:Δy 在 1.5m,Δx 最靠近之車輛 小汽車左(右)前(後)車:Δy 在 1.5m~3m 範圍,Δx 最靠近之車輛 機車前(後)車:Δy 在 0.6m,Δx 最靠近之車輛 機車左(右)前(後)車:Δy 在 0.6m~1.2m 範圍,Δx 最靠近之車輛
21 圖 3.3-2 本車與前車及後車相對位置示意圖 上圖中紅色車輛 i 為本車,橙色線條為本車車頭中點向左與向右 1.5 公尺的 區間範圍,在此 3 公尺的範圍內即為前車與後車的判斷區間,此範圍內前方最近 車輛即為前車 Fit;範圍內後方最近車輛為後車 Bit。 圖 3.3-3 本車與左前車及左後車相對位置示意圖 上圖中紅色車輛 i 為本車,橙色線條為本車車頭中點向左 1.5 公尺到 3 公尺 的區間範圍,在此 3 公尺的範圍內即為左前車與左後車的判斷區間,此範圍內前 方最近車輛即為左前車 LFit;範圍內後方最近車輛為左後車 LBit。判斷右前車與 右後車的方法如同判斷左側方法,判斷區間向右 1.5 公尺到 3 公尺。其判斷標準 主要是以車道寬度 3 公尺作為準則,而機車車寬較窄僅 0.6 公尺進行判斷。 有了車輛相對位置的判斷才能進行變數的擷取,例如在第 150 秒本車與前車 之相對距離與相對速度等變數擷取,前後左右車輛關係在建立了自動化的篩選機 制後,可以用影像還原播放的方式檢測各車輛相對位置,而自動化產生的結果與 影片還原播放所呈現的相對位置符合,本篇研究的判斷將以此為依據,將 30 分 鐘內各時點(秒)的所有車輛相對位置求算判斷。
22
3.3.2 判斷車輛車道變換
車道變換模式的車道變換選擇採用自動化判斷的方式。可以判斷每個時點的 本車直行、向左偏移、向右偏移狀態。三種狀態之規則如下: 1. 向左偏移: (1) 汽車:同一車機於連續時間內,當∆yt = yt+1 - yt之值最少連續兩秒大 於 0.75 公尺,或者與下兩秒之側向偏移距離差值 (∆yt’ = yt+2 - yt)至 少大於 1.5 公尺,且∆yt’ > 0,則視為向左偏移。 (2) 機車:同一車機於連續時間內,當∆yt = yt+1 - yt之值最少連續兩秒大 於 0.6 公尺,或者與下兩秒之側向偏移距離差值 (∆yt’ = yt+2 - yt)至少 大於 1.2 公尺,且∆yt’ > 0。則視為向左偏移。 2. 向右偏移: (1) 汽車:同一車機於連續時間內,當∆yt = yt+1 - yt之值最少連續兩秒大 於 0.75 公尺,或者與下兩秒之側向偏移距離差值 (∆yt’ = yt+2 - yt)至 少大於 1.5 公尺,且∆yt’ < 0,則視為向右偏移。 (2) 機車:同一車機於連續時間內,當∆yt = yt+1 - yt之值最少連續兩秒大 於 0.6 公尺,或者與下兩秒之側向偏移距離差值 (∆yt’ = yt+2 - yt)至少 大於 1.2 公尺,且∆yt’ < 0。則視為向右偏移。 3. 直行: (1) 汽車:未發生向左偏移與向右偏移之狀態判斷為直行,其∆yt 與∆yt’ 皆未達到汽車偏移之標準。 (2) 機車:未發生向左偏移與向右偏移之狀態判斷為直行,其∆yt 與∆yt’ 皆未達到機車偏移之標準。23 表 3.3-1車輛車道變換資料量統計 車種 編號 向右偏移 向左偏移 直行 資料量總數 資料筆數 車輛數 資料筆數 車輛數 資料筆數 直行 車輛數 純粹直行 車輛數 資料筆數 車輛數 機車 2 959 (7.8%) 272 463 (3.8%) 165 10889 (88.4%) 818 471 12311 818 小汽車 3 281 (2.7%) 55 96 (0.9%) 30 10027 (96.4%) 563 489 10404 564 計程車 7 101 (1.2%) 32 88 (1.1%) 28 8018 (97.7%) 206 161 8207 206 小巴士 4 0 (0%) 0 7 (7%) 2 94 (93%) 3 1 101 3 公車 5 141 (4.1%) 40 132 (3.8%) 35 3202 (92.1%) 69 22 3475 69 總量 1482 399 786 260 32230 1654 1144 34498 1654 統計的資料量如上表所示,市區道路中的汽機車向左偏向和向右偏向的比率 是屬於偏低的,尤其一般小汽車直行的比例遠高於向左與向右之比例。表中的純 粹直行車輛數代表該車在任何時點下都未發生偏移的情況;直行車輛數則代表有 出現過直行狀態的車輛。而機車佔整體資料量的比例為最高,接近 50%的車輛數 為機車,其次才為小汽車與計程車。此資料筆數為原始資料庫筆數,並非分析時 所用的資料筆數,模式建立時使用的資料會先經過過濾(例如車輛速度為 0 的資 料),因此實際校估所使用的資料筆數會較原始資料為少。
24
第四章 小汽車與機車車道變換模式
4.1 小汽車車道變換模式
本研究之車道變換模式使用個體選擇模式建立。個體選擇模式可應用於間斷 型選擇,本章節所用之選擇可概分為三類:向前直行、往左偏向、往右偏向三種 選擇行為。在此使用個體選擇模式中的多項羅吉特模式,基本假設為隨機效用理 論與效用最大化原則。假設不同之方案選擇對於使用者都有一特定效用(Uni),並 且可分為可衡量部分(Vni)與不可衡量部分的隨機誤差項(εni)。其中羅吉特模式假 設誤差項(εni)獨立且服從 IID 的 Gumbel 分配。 Uni = Vni + εni Vni = αi + βi1× xn1 + βi2× xn2 + … +βiK× xnK (10) 其中, Uni:替選方案 i (車道選擇)可以帶給觀測值 n 的效用 Vni:替選方案 i (車道選擇)可以帶給觀測值 n 的可衡量效用 εni:替選方案 i (車道選擇)可以帶給觀測值 n 的不可衡量隨機誤差項 αi:校估的常數項 βik:校估的替選方案第 k 個解釋變數 藉由多項羅吉特模式校估出參數後,可將三種不同的替選方案(向前、向左、 向右)選擇機率計算,選擇方案 i 的機率如下表示: 𝑃𝑛𝑖 = exp (𝑉𝑛𝑖) ∑𝑗∈𝐽𝑛exp (𝑉𝑛𝑗) (11) 小汽車車道變換模式使用多項羅吉特模式建構,模式中的替選方案效用為: 向前直行(V1)、向左偏移(V2)、向右偏移(V3)三種車道選擇效用。藉由變數擷取 並且校估參數可以分析在該時點下的駕駛行為,依照不同的效用比較駕駛人當時 的選擇機率。而影響小汽車駕駛人的主要影響變數有本車與鄰車之相對距離、本 車與鄰車之相對速度、鄰車車種、本車車速等變數。本研究 30 分鐘小汽車資料 筆數共有一萬多筆,但是小汽車在市區道路向左與向右偏移的資料僅有 96 筆 (0.9%)和 281 筆(2.7%)。本研究嘗試過將所有資料進行參數校估,但是直接將所 有資料校估會發生選擇皆為直行(Choice=1)的情形,結果的 Rho-square 值偏高。 故進行汽車小樣本資料的過濾:除了過濾不正常的資料,也不考量強制變換車道 (MLC)情形,僅保留有向左或向右偏移車輛的直行資料,並將座標範圍設定為路 段中央,不考慮速度為 0 的本車資料。基本小汽車車道變換模式如下表示:25 V1 = βDX1∙DX_F + βDV1∙DV_F + βM1∙Mode_F + βV∙V V 2 = ASCL + βDX2∙DX_LF + βDV2∙DV_LF + βM2∙Mode_LF + βDXB∙DX_LB + β DVB∙DV_LB + βMB∙Mode_LB V 3 = ASCR + βDX2∙DX_RF + βDV2∙DV_RF + βM2∙Mode_RF + βDXB∙DX_RB + βDVB∙DV_RB + βMB∙Mode_RB 表 4.1-1 小汽車車道變換模式變數說明 變數 正前 左前/左後 右前/右後 常數 ASCL ASCR 相對距離 DX_F DX_LF/DX_LB DX_RF/DX_RB 相對速度 DV_F DV_LF/DV_LB DV_RF/DV_RB
車種 Mode_F Mode_LF/Mode_LB Mode_RF/Mode_RB
此模式「向前直行」的考量變數有本車與前車之相對距離,本車與前車的相 對速度,本車當時的行駛速度(V)。而「向左偏移」必須考量左前車與左後車的 相對距離、相對速度和車種;「向右偏移」與向左偏移類似,右前車和右後車的 變數都必須一起考量。小汽車車道變換模式參數校估測驗結果如下表所示: 表 4.1-2 小汽車車道變換模式測驗結果 變數名稱 參數值 標準誤差 t 值 p-value ASCC 0.00 fixed ASCL -1.79 0.604 -2.97 0.00 ASCR -1.81 0.591 -3.06 0.00 βDV1 (前車) 0.277 0.113 2.45 0.01 β DV2 (左前車、右前車) 0.140 0.0821 1.71 0.09* β DVB (左後車、右後車) 0.251 0.0672 3.73 0.00 βDX1 (前車) -3.76 0.917 -4.11 0.00 βDX2 (左前車、右前車) 2.58 0.487 5.29 0.00 β DXB (左後車、右後車) 3.87 0.582 6.65 0.00 βM1 (前車) -0.358 0.181 -1.98 0.05 βM2 (左前車、右前車) -0.453 0.121 -3.75 0.00 βMB (左後車、右後車) 0.196 0.124 1.58 0.11* βV (本車速度) 0.479 0.0961 4.98 0.00 分析資料筆數:483 Init log-likelihood:-499.409 Final log-likelihood:-329.610 Adjusted rho-square:0.316
26 測驗結果鄰前車的速度差與鄰後車車種校估結果較不顯著,其餘參數結果皆 顯著。P-value 值標註*者表示在顯著水準=0.05 的前提下,其參數校估結果不顯 著者。前車的車種參數亦為顯著結果,表示不同車種對駕駛人選擇不同車道時會 有直接影響。參數結果的正負號與預測結果大致符合,常數項、相對距離和速度 差皆符合預測,當前方車輛離本車越遠,或者前車車輛較本車越快,汽車駕駛越 不會變換車道;而本車駕駛離後車越遠或者速度越快也較不會變換車道。參數的 正負號預測僅後車車種的正負號預測錯誤,小汽車駕駛人可能較不偏好行駛於機 車等小型車輛前方,但是前方的大型車輛也會讓本車駕駛變換車道意願提高。向 左偏移常數項(ASCL)與向右偏移常數項(ASCR)數值接近,但是汽車駕駛相對偏 好向左偏移變換車道,並非所有汽車變換車道都是為了進行超車,某些駕駛只是 為了取得更順暢的行駛空間才變換車道。 參考表 3.3-1 的統計資料量可發現,在市區道路的小汽車向左向右偏移資料 量偏低,必須將接近路口的強制性左右轉(Mandatory lane change, MLC)資料手動 刪除,另外並不將駕駛行為較特殊的計程車放入模式中。 小汽車車道變換模式的結果可以如下表示: V1 = (-3.76∙DX_F) + (0.277∙DV_F) – (0.358∙Mode_F) + (0.479∙V) V 2 = -1.79 + (2.58∙DX_LF) + (0.140∙DV_LF) – (0.453∙Mode_LF) + (3.87∙DX_LB) + (0.251∙DV_LB) + (0.196∙Mode_LB) V 3 = -1.81 + (2.58∙DX_RF) + (0.140∙DV_RF) – (0.453∙Mode_RF) + (3.87∙DX_RB) + (0.251∙DV_RB) + (0.196∙Mode_RB) 模式結果的好壞可以用統計檢定比較加入不同參數是否改善,另外也可使用 判中率的方式來比較模式結果。使用判中率法比較主要是先將資料篩選出小樣本 筆數資料,然後依照模式校估出來的結果,和其他資料進行比對,如果判斷正確 則算判中,藉此可以比較模式的判中率。但是採用判中率法必須將樣本比例切割 至比例差距不可過大,否則全部的判中率將會是以最高比例之決定為主。在進行 判中率法時,將樣本資料的模式決策與實際決策比對,可以建立下表判中率矩陣 檢視結果,整體判中率為 70%。
27 表 4.1-3 小汽車小樣本模式判中率 模式判中率 實際決策 直行 左偏向 右偏向 模式決策 直行 221(91.70%) 21(16.94%) 26(22.03%) 左偏向 5(2.07%) 68(54.84%) 45(38.14%) 右偏向 15(6.22%) 35(28.23%) 47(39.83%) 整體判中率:70% 另外一種判中率測試方式為將 483 筆資料切割。利用其中的 80%資料共 380 筆進行模式參數校估 (直行:偏左:偏右 = 190 : 98 : 92);剩餘的 20%資料共 103 筆拿來進行判中率測試 (直行:偏左:偏右 = 51 : 26 : 26)。測試的結果如下表所 示,整體判中率約為 63%。 本研究將李健豪 (2012)所建立之模式進行改善,以規則化的方式找出本車 的鄰近車輛,鄰近車輛的考量不僅只考慮汽車,包含機車及公車等混合車流不同 車種亦在研究中納入,並且將直行車輛的解釋變數加入了本車的移動速度,將前 車與鄰前車的參數校估分開討論,因此不同的鄰近車輛關係會產生不同的變換車 道決策考量,可以相同的規則進行小樣本資料選取,以及變換車道、鄰車判斷與 變數擷取,以應用至不同地區資料。 表 4.1-4 小汽車小樣本模式判中率(資料切割) 模式判中率 實際決策 直行 左偏向 右偏向 模式決策 直行 42(82.3%) 4(15.4%) 6(23.1%) 左偏向 3(5.9%) 10(38.5%) 7(26.9%) 右偏向 6(11.8%) 12(46.1%) 13(50.0%) 整體判中率:63%
4.2 機車車道變換模式
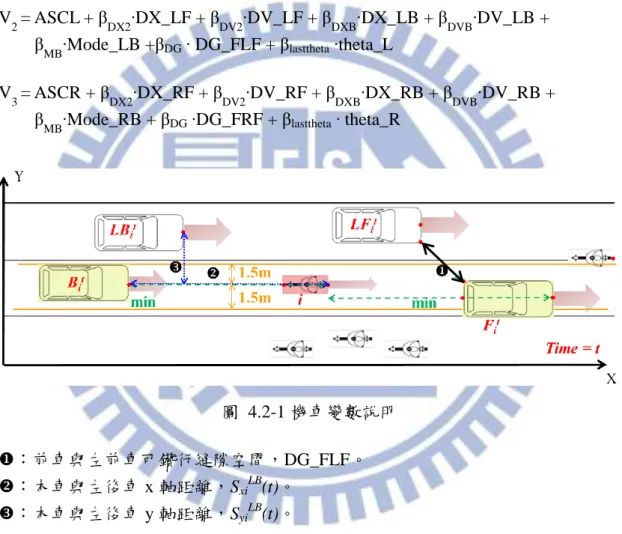
國內混合車流中機車車輛數佔了超過 50%的比例,對於整體車流影響甚大。 機車的車道變換模式較小汽車複雜,機車的車道不像小汽車有實線劃分,而是以 虛擬車道的觀念在運行,且機車具有機動性高的特性,在國內市區道路行駛時常 鑽行於車陣之中,因此必須擷取更複雜的變數解釋其行為特點。28 微觀機車車道變換模式研究文獻不多,Lee et al. (2009)研究以多項羅吉特模 式分析英國機車車道選擇行為。但是國內機車駕駛特性與國外不同,必須從國內 影片擷取機車重要變數,並且分析影響機車駕駛行為的各種可能性,包含公車的 影響也必須納入。目前建立的機車車道變換模式,先以類似小汽車車道變換模式 的多項羅吉特模式為主,主要變數除了涵蓋小汽車模式就有的相對距離、速度差 和車種外,加入了前車與左前車之間的可鑽行空間距離,前車與右車也一起考量。 此外上一秒的角度偏移量也納入變數中建立模式。基本機車車道變換模式如下: V 1 = βDX1∙DX_F + βDV1∙DV_F + βM1∙Mode_F V 2 = ASCL + βDX2∙DX_LF + βDV2∙DV_LF + βDXB∙DX_LB + βDVB∙DV_LB +
βMB∙Mode_LB +βDG ∙ DG_FLF + βlasttheta ∙theta_L
V
3 = ASCR + βDX2∙DX_RF + βDV2∙DV_RF + βDXB∙DX_RB + βDVB∙DV_RB +
βMB∙Mode_RB + βDG ∙DG_FRF + βlasttheta ∙ theta_R
圖 4.2-1 機車變數說明 :前車與左前車可鑽行縫隙空間,DG_FLF。
:本車與左後車 x 軸距離,SxiLB(t)。