國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
應用移動式偵測器執行考量旅客消費影響之號誌控制研究 A Study of Applying Mobile Detector on Traffic Signal Control
Which Considering Travelers consumption Impact
李宜儒 Yi-Ru Li
指導教授:張堂賢 博士 Advisor: Tang-Hsien Chang, Ph.D.
中華民國 104 年 7 月
July, 2015
誌謝
時光冉冉,一轉眼研究所兩年即將來到尾聲,這兩年間能順利完成研究及論 文首先要感謝學生的指導教授張堂賢老師,從大四推甄後進入研究室開始兩年多 的指導教誨以及關心照顧,恰到好處地給予學生自主學習的空間使其盡情發揮,
除了累積學術上的理論基礎外亦強調培養動手實作的能力,離開學校後才是真正 的戰場。感謝台大交通組的王弓老師、張學孔老師、許添本老師、賴勇成老師、
朱致遠老師、陳柏華老師、許聿廷老師的教導。同時也要感謝田堯彰老師以及趙 鍵哲老師兩位我大學時期的導師,除了課業上的指導外對於人生規劃及選擇上也 有莫大的幫助。此外特別感謝我的學位考試委員陶治中教授以及羅孝賢教授在口 試中給予論文寶貴的指正與建議,讓我的碩士研究以及論文撰寫更臻完備。
感謝瓅凱學長花費許多時間及心力跟我討論研究上遇到的困難、幫助我解決 程式撰寫的問題及各種課內外的疑難雜症;感謝嘉宏學長給我寶貴的機會接觸不 同領域的研究專案,開啟我對於資料科學的認識。還有同研究室的同期戰友東宏、
宏誠、哲浩、俊廷共同討論課業及論文進度,學弟妹周祥、林威、申霖以及 317 的姿君及岱凝以及交通組R02 的同學,因為各位讓我有愉快的兩年碩士生涯。
最後,要感謝我的家人對我的支持與愛護,讓我在沒有後顧之憂的狀況下順 利完成學業,感謝爸爸、媽媽以及和我一樣正在讀研究所的妹妹,台大碩士學位 的榮耀是屬於你們的。
李宜儒 2015 年 7 月 台大國青
中文摘要
隨著科技的進步,網際網路以及無線通訊技術的提升使得資訊的傳輸門檻大 幅降低。同一時間硬體設施也在技術的進步下越來越精良,如今,智慧型行動裝 置已經成為人手一台的基本配備,其所具備的功能也不再侷限在通訊而已,近年 來物聯網 (Internet of Things,IOT) 的崛起讓人、車、路的溝通不再困難;智慧型 個人裝置的強大功能讓偵測、資料蒐集以及資料傳輸的困難度大幅降低,配合大 量的使用族群,彷彿建立了一個現成的資料蒐集平台。在此平台下僅需要花費少 量的成本即可蒐集各式所需的資訊以供使用,在資料科學 (Data Science) 發展快速 的現今,利用各式各樣的資料進行分析與預測對於使用者及管理單位都有非常大 的助益。
除了科技上的進步與改變,想法上的改變也正在影響整個社會,交通運輸也 從以車為本漸漸轉變成以人為本,同時環保、永續等議題亦同時影響的交通運輸 的發展;拜科技發展之賜,現今偵測技術及通訊技術的進步使得資料蒐集的方法 及類型越來越多元,傳統的號誌控制是建立在以車為本的狀態下蒐集特定資料進 行演算;利用不同型態的資料在以人為本的號誌控制則沒有太多相關研究。因此 本研究將利用移動式車輛偵測器進行旅客消費資料蒐集,並利用蒐集而來的消費 資料配合傳統的號誌演算法得到新的號誌控制模式,在結果方面除了傳統的停等 延滯外,同時考慮旅客消費對地方所帶來的經濟效益以及行車所造成的碳排放所 造成的負面效果。研究成果將可作為日後以不同形態資料進行號誌演算之參考,
對未來第五代的交通運輸觀念能有所貢獻。
關鍵字:移動式車輛偵測、適應性號誌、物聯網、碳排放、運輸經濟
ABSTRACT
With the rapid development of technology, Internet and wireless communication technology have been widely accessible to the general public. Concurrently, the sophistication of hardware facilities is significantly increased. Nowadays, smart mobile devices have become the necessity for people and are not limited for communication use merely. In recent years, the rise of the Internet of Things (IOT) facilitates the integration of communication, control, and information processing across various transportation systems. Applications of the IOT have been extended to broad aspects of transportation system management, which addresses the communications between road users, vehicles, and infrastructures. Flexible and real-time interaction between the components of a transportation system enables inter/intra vehicular communication, smart traffic control, dynamic data acquisition, road assistance, etc. Smart mobile devices are so powerful that have greatly lowered the barrier and cost for traffic detection, thereby making it possible to establish a data collection platform in a short time.
The progress in communication science and technology also shifts the way of thinking of the whole society, leading a trend of transportation development from a vehicle-based context to a human-based one. Traditional traffic control is built largely based on vehicle-oriented considerations and operated by using the associated data.
Hence, this study seeks to use smart mobile devices as detectors to collect a new type of traffic data, such as passenger/consumer information and to develop an adaptive control algorithm thereupon, where both delay and carbon emission are considered.
Keywords: Mobile Vehicle Detector, Adaptive Control, Internet of Things,
Carbon Emission, Transportation Economics
CONTENTS
口試委員會審定書 ... #
誌謝 ...i
中文摘要 ... ii
ABSTRACT ... iii
CONTENTS ...iv
LIST OF FIGURES ... vii
LIST OF TABLES ... x
Chapter 1
緒論... 11.1 研究動機 ... 1
1.2 研究目的 ... 2
1.3 研究內容及範圍 ... 3
1.4 研究流程 ... 4
Chapter 2
文獻回顧 ... 72.1 車路整合應用 ... 7
2.1.1 美國 ... 7
2.1.2 歐盟地區 ... 13
2.1.3 日本 ... 18
2.1.4 國內車路整合應用發展 ... 21
2.2 無線通訊技術 ... 22
2.2.1 Wi-Fi ... 23
2.2.2 藍芽(Bluetooth) ... 24
2.3 號誌控制邏輯 ... 27
2.3.1 電腦號誌控制策略 ... 27
2.3.2 電腦號誌控制系統 ... 32
2.4 運輸經濟理論 ... 37
2.4.1 擁擠定價 ... 37
2.4.2 時間價值 ... 38
2.5 汽機車怠速及碳排放價格 ... 39
2.6 文獻回顧小結 ... 39
Chapter 3
移動式車輛偵測模式 ... 423.1 移動式車輛偵測模式 ... 42
3.2 近場資訊系統路側設備 ... 44
3.2.1 近場資訊系統路側設備之應用說明 ... 44
3.2.2 車輛資訊偵測 ... 45
3.3 雲端演算伺服器 ... 46
3.3.1 通訊檢核模組 ... 46
3.3.2 SQL 資料庫 ... 47
3.4 近場資訊系統資訊收發方式及應用說明 ... 52
Chapter4 考量消費之號誌演算模組 ... 55
4.1 適應性控制 ... 55
4.2 模式控制邏輯 ... 57
4.3 延滯計算方式 ... 59
Chapter5 數值實驗設計與分析 ... 62
5.1 車流模擬系統 ... 62
5.2 模擬實驗設計 ... 69
5.3 模擬績效評估 ... 72
Chapter6 結論與建議 ... 77
6.1 結論 ... 77
6.2 建議 ... 78
REFERENCE ... 80 附錄 82
LIST OF FIGURES
圖 1-1 本研究與傳統號誌控制之差異示意圖 ... 3
圖1-2 獨立四叉路口 ... 4
圖1-3 研究流程圖 ... 5
圖2-1 美國智慧運輸系統實體架構圖 ... 8
圖2-2 美國 CVRIA 計畫實現車間通訊示意圖 ... 9
圖2-3 ITS Station 運用圖拓概念圖 ... 14
圖2-4 CVIS 點對點資訊傳送示意圖 ... 14
圖2-5 Smartway 與 VICS、ETC 關係圖 ... 19
圖2-6 日本未來交通資訊管理服務系統架構圖 ... 20
圖2-7 Big Data 應用於車路整合系統概述 ... 21
圖2-8 行動式交通管理資訊發布系統架構圖 ... 22
圖2-9 Bluetooth 4.0 技術的核心架構圖 ... 26
圖2-10 交控策略之應用層級架構圖 ... 32
圖3-1 整體執行系統架構說明圖 ... 42
圖3-2 封包機制檢核流程 ... 46
圖3-3 資料插補概念圖 ... 49
圖3-4 移動式車輛偵測與傳統模式差異 ... 54
圖4-1 兩階段水平推移圖 ... 56
圖4-2 推移過程圖示 ... 56
圖4-3 適應性控制邏輯圖 ... 58
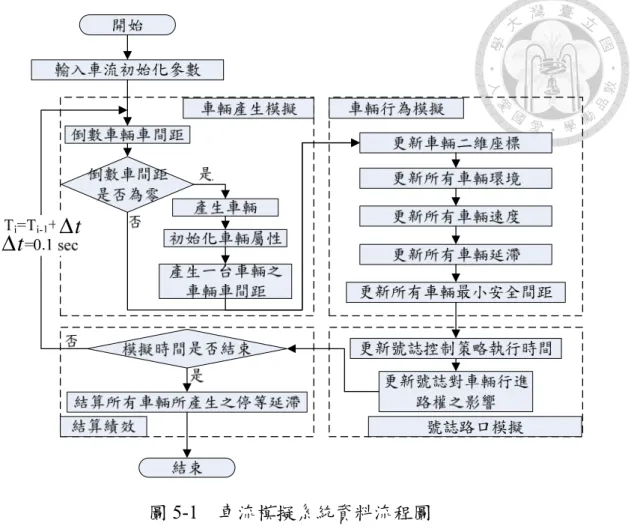
圖5-1 車流模擬系統資料流程圖 ... 64
圖5-2 改良 OPAC 邏輯之運作流程... 65
圖5-3 車輛二維座標點及駕駛軸示意圖 ... 67
圖5-4 車輛前方偵測區、車輛車長及車寬示意圖 ... 68
圖5-5 路口幾何(1) ... 70
圖5-6 路口幾何(2) ... 71
圖5-7 3X3 車道平均每車延滯 ... 75
圖5-8 3X3 車道總消費額 ... 76
附圖-1 2X2 原始定時控制平均每車延滯 ... 82
附圖-2 2X2 原始定時控制總消費 ... 82
附圖-3 2X2 原始定時控制總利益 ... 82
附圖-4 2X2 考量消費高低之定時控制平均每車延滯 ... 83
附圖-5 2X2 考量消費高低之定時控制總消費 ... 83
附圖-6 2X2 考量消費高低之定時控制總利益 ... 83
附圖-7 2X2 考量消費高中低之定時控制平均每車延滯 ... 84
附圖-8 2X2 考量消費高中低之定時控制總消費 ... 84
附圖-9 2X2 考量消費高中低之定時控制總利益 ... 84
附圖-10 3X3 原始適應性控制平均每車延滯 ... 85
附圖-11 3X3 原始適應性控制總消費 ... 85
附圖-12 3X3 原始適應性控制總利益 ... 85
附圖-13 3X3 考量消費高低之適應性控制平均每車延滯 ... 86
附圖-14 3X3 考量消費高低之適應性控制總消費 ... 86
附圖-15 3X3 考量消費高低之適應性控制總利益 ... 86
附圖-16 3X3 考量消費高中低之適應性控制平均每車延滯 ... 87 附圖-17 3X3 考量消費高中低之適應性控制總消費 ... 87 附圖-18 3X3 考量消費高中低之適應性控制總利益 ... 87
LIST OF TABLES
表2-1 系統架構實際應用說明表 ... 10
表2-2 交通效率應用說明表 ... 17
表2-3 藍牙 4.0 技術通訊協定說明 ... 25
表2-4 時間價值研究文獻 ... 38
表3-1 「近場通訊偵測原始資料」資料表 ... 51
表3-2 「近場通訊偵測旅行時間資料」資料表 ... 51
表5-1 車道數 2X2 傳統適應性控制平均每車延滯 ... 72
表5-2 車道數 2X2 考慮消費額之適應性控制平均每車延滯 ... 73
表5-3 車道數 2X2 傳統適應性控制總消費 ... 73
表5-4 車道數 2X2 考慮消費額之適應性控制總消費 ... 74
表5-5 車道數 2X2 傳統適應性控制總利益 ... 74
表5-6 車道數 2X2 考慮消費額之適應性控制總利益 ... 75
Chapter 1 緒論
1.1 研究動機
隨著網路與無線技術經過數代的進步,從無線感測網路、區域無線網路、都 會型無線網路、個人通訊無線網路與車載資通訊等如雨後春筍般迅速發展。今日,
無所不在的通訊與運算已經在人們日常生活及工作上成為不可或缺的一部分。早 期人們藉由不同種類設備或技術才能達成的服務在今日可能僅僅一台智慧型行動 裝置及可達成,在這樣的科技發展下,利用現今成熟技術取代或是精進目前我們 所使用的設施也將不再遙不可及。同時這些技術也帶動了許多嶄新的應用,帶給 人們更方便的服務。
從發展趨勢的觀點出發,因應物聯網 (Internet of Things, IOT) 的蓬勃發展,
讓所有的普通物理對象如人、車、路實現互連互通的網路,倘若有辦法得知個人 及設施的詳盡資訊,對於日後交通領域研究是必會有巨大的進展。在交通領域的 發展過程中,早期人們不斷的使用各種方法及偵測器想取得車輛行駛的基本參數 甚至是駕駛本身行為,而物聯網的發展剛好可以符合交通領域的需求,建置成本 推斷也比傳統設備低上許多,在大部分軟硬體設施皆已準備妥當的狀態下,進入 門檻不會比傳統方式高上太多。
除了實質上的物質進步,人們生活不再只是單純為了工作;觀光、旅遊、消 費等休閒生活也日益受到重視,傳統上常使用和交通有直接相關的參數進行號誌 演算及相關研究,例如車速、車流量等;在社會跟科技的進步下,在個人化智慧 裝置以及各式感應器發展多元的環境下,除了上述的幾項交通參數外越來越多資 訊都可以藉由多元的感應器蒐集,近年來,永續發展(Sustainable Development)、綠
色交通(Greening Transportation)已成為全球化都市發展趨勢,強調以人為本的人本 交通(Human Oriented Transportation)逐漸受到世人重視;本研究將納入與以往不同 類型的資料 (如:消費金額等),進行號誌邏輯控制演算,比較其結果和傳統模式之 差異,並嘗試分析造成此結果背後的原因,以期日後能供相關單位擬定適當的交 通控制策略。
1.2 研究目的
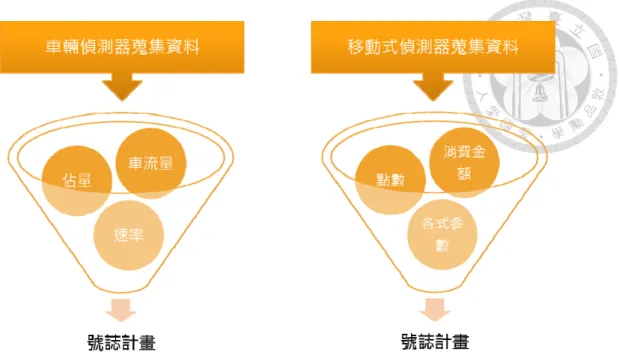
本研究之目的希望建構利用無線通訊技術蒐集車輛及駕駛者資訊之模式,根 據不同通訊技術的特性進行技術應用及模擬,本研究將利用 Wi-Fi 無線區域網路 及藍芽(Bluetooth)無線技術行資料蒐集,除車流量等交通參數外,另外會蒐集旅客 的消費金額做為號誌運算的參數之一,消費額部分使用個人行動設備紀錄,利用 與路口偵測器通訊的同時一併傳送;後台根據蒐集到的資訊進行號誌邏輯演算求 解號誌時相。除了資料蒐集和傳統方式不同外,帶入號誌演算的參數也有改變,
不再是常見的速率、車流量等交通參數,取而代之的為點數、消費紀錄等各式可 蒐集到的參數。
由於目前蒐集旅行者消費金額的應用並不是十分普及,故本研究採用軟體進 行模擬;考量無線通訊的特色及資料傳輸可靠度等相關因素,撰寫電腦模擬程式,
並根據模擬結果計算績效做為參考藉以判斷策略可行與否。
因此,本研究嘗試針對移動車輛偵測進行模擬,同時加入旅客消費額此一新 類型資料於號誌控制邏輯演算,並根據模擬結果進行績效比較及敏感度分析,提 供未來考慮不同型態參數一個參考依據。
圖 1-1 本研究與傳統號誌控制之差異示意圖
1.3 研究內容及範圍
本研究之號誌演算邏輯模式分將分為兩大模組,分別為「移動車輛偵測模組」
以及「號誌控制演算模組」,移動車輛偵測模組主要目的為資料蒐集,利用無線技 術取代傳統的車輛偵測器進行交通量及所需參數的蒐集工作,確保後續演算流程 能順利進行。而號誌控制演算模組則將移動車輛偵測模組所蒐集來的資料進行號 誌控制邏輯演算,同時根據模擬結果進行績效計算,期望能方便地和其他不同方 式做比較。
本研究範圍為獨立四叉路口(示意圖如圖 1-1),其號誌時相為常見之簡單二時 相。分析號誌控制邏輯與不同車流量、不同旅客消費額之關係,車流流量情境依 據獨立四叉路口幾何分為南北向車流一組、東西向車流一組,兩組車流輸入各為 每小時200 至 1200 之車流量情境,以每小時 100 車流量做為單位,故可切分為 11 種情境進行模擬。
圖1-2 獨立四叉路口
1.4 研究流程
本研究之流程如圖 1-2 所示,首先界定欲探討的問題,確認研究動機以及目 的;接著蒐集過去相關類似研究文獻,以此確立本研究中各模式中所使用的偵測 方式及演算法。接著使用JAVA 程式語言進行模擬程式開發,利用此程式進行相關 數值實驗模擬,將所得結果進行分析,最後提出本研究的結論與建議。
研究問題界定
文獻回顧
研究方法選擇
建構移動式車輛偵測器號 誌控制模式
程式實作
數值實驗設計與分析
結論與建議
移動車輛偵測模組 號誌控制邏輯演算
模組
無線通訊技術 號誌控制邏輯
圖1-3 研究流程圖
本研究共有六章,各章節安排如下所示:
第一章為緒論,敘述本研究的研究動機與研究目的,界定本研究問題內容與 模擬範圍。
第二章為文獻回顧,此章內容共分為兩大部分,第一部分為無分通訊技術介 紹,簡介目前常用之無線通訊技術及發展現況;另一部分各種號誌控制邏輯之研 究回顧,並小結本研究欲採用的通訊技術及號誌演算方式。
第三章為移動式車輛偵測器號誌控制模式,根據第二章文獻回顧所決定的無 線通訊技術及號誌控制演算法建構移動式車輛偵測模組、號誌控制邏輯演算模 組,透過移動式車輛偵測模組中所蒐集到的資料進行號誌控制邏輯演算。
第四章為考量消費之號誌演算模組,介紹如何建立考量新形態之消費資料納 入號誌控制演算邏輯。
第五章為數值實驗設計與分析,本研究之模擬環境為獨立四叉路口,其號誌 時相採用國內常用之簡單二時相。加入旅行者消費金額進行演算,同時為了簡化 研究複雜度,本研究模擬路口禁止左轉,以取得因號誌控制影響所產生之停等延 滯。
第六章為結論與建議,綜合實驗分析結果提出本研究的結論以及未來進行相 關研究時的建議事項。
Chapter 2 文獻回顧
本研究的主要目的為日益普及的行動設備利用無線通訊技術進行資料蒐集,
並透過偵測器取得的參數進行號誌邏輯演算,因此本章節文獻回顧共分為六個小 節,2.1 回顧國外車路整合應用及國內發展;2.2 比較目前兩大無線通訊技術的特 色以及各自優勢;2.3 回顧常見的號誌控制邏輯;2.4 及 2.5 分別就運輸經濟中的擁 擠訂價及時間成本和碳排放價格進行回顧。
2.1 車路整合應用
車路整合系統在世界各大城市中行之有年,透過電腦控制建立完整的通訊網 路系統、路測偵測設備系統以及中心資料庫系統等,以應付瞬息萬變的交通需求。
近年來台灣的交通複雜程度日益提高,若僅依靠傳統的號誌控制系統進行交 通管理已無法紓解龐大且變化巨大的交通需求,本節將以美加、歐盟、日本三個 地區說明世界發展車路整合的現況,及台灣已實施之車路整合系統架構,作為本 研究移動式車輛偵測系統的參考。
2.1.1 美國
1. ITS 實體架構
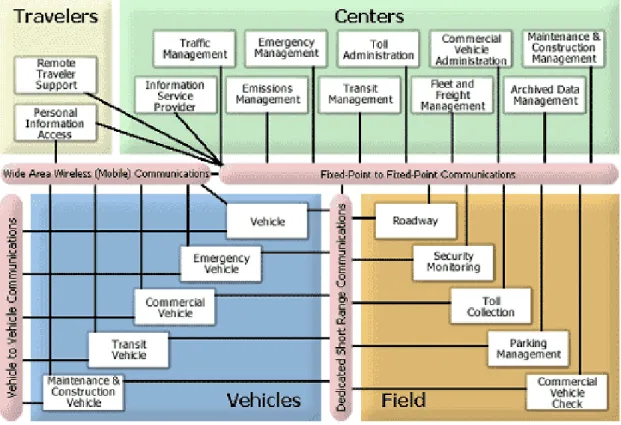
依據美國ITS7.0 綱要所公告相關 ITS 實體架構圖中,將主要系統區分成 四個部分,其中包括中心端(Centers)、旅行者端(Travelers)、車輛端(Vehicles) 以及路側(Wayside),其系統架構圖如圖 2-1 所示。四個主要系統間皆有不同的 資訊傳輸方式,如下說明:
(1)車輛端與路側端為短距通訊(Dedicated Short Range Communications) (2)車輛間之訊息傳輸使用車間通訊(Vehicle to Vehicle Communications) (3)路側和中心之資訊溝通使用有線通訊(Wire line communications)
(4) 旅 行 者 和 車 輛 端 之 資 訊 傳 輸 為 無 線 廣 域 網 路 (Wide area wireless communications)。
資料來源:http://www.standards.its.dot.gov/LearnAboutStandards/NationalITSArchitecture
圖2-1 美國智慧運輸系統實體架構圖
上述四個主要系統之間相互傳遞資訊的應用,美國交通部於 2012 成立 Intelligent Transportation System Joint Program Office (ITS JPO),其工作內容為針對 智慧車輛、智慧路側設備以及整合上述四個主要系統中的任兩子系統連結的創新 應用發展。
ITS JPO 於 2013 年 提 出 的 Connected Vehicle Reference Implementation
Architecture (CVRIA)計畫,透過短距無線通訊的方式實現車間通訊及車路通訊,
目的為增加車輛的感測區域,以達到減少交通事故或預先偵測可能發生的碰撞,
如圖2-2 所示。各車輛能透過車上短距無線通訊發送或接受資訊,包括自身及鄰近 其他車輛位置、行駛速度及車輛設備狀況等車輛資訊。
資料來源:http://www.its.dot.gov/safety_pilot/index.htm 圖2-2 美國 CVRIA 計畫實現車間通訊示意圖
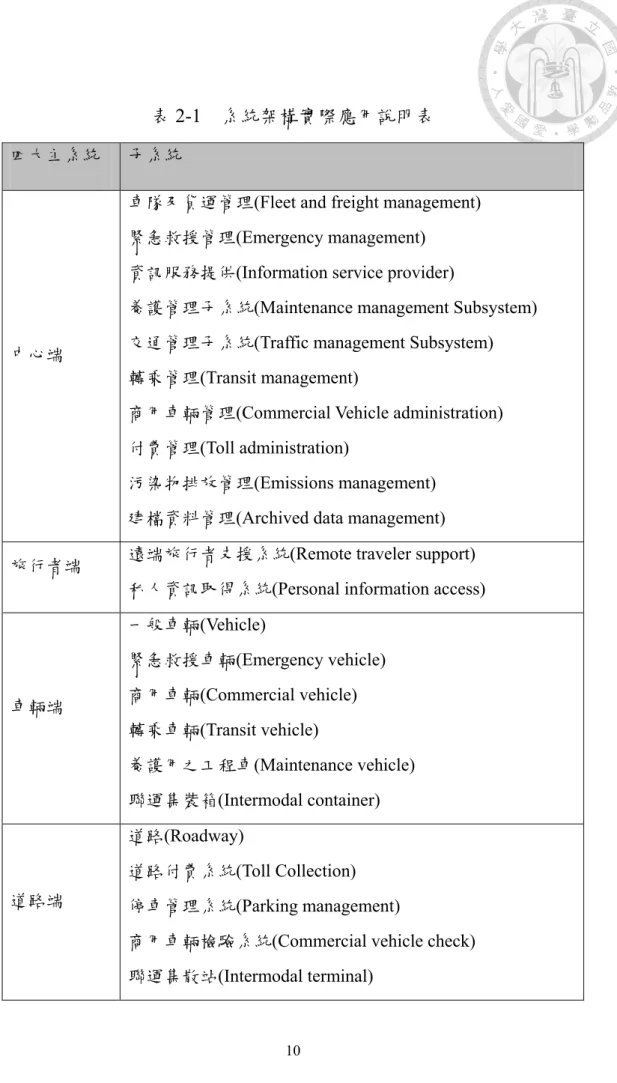
四大主系統之實際應用內涵根據中心端(Centers)、旅行者端(Travelers)、車輛 端(Vehicles)以及路側(Wayside)四大部分進行區分,如表 2-1 所示。
表2-1 系統架構實際應用說明表 四大主系統 子系統
中心端
車隊及貨運管理(Fleet and freight management) 緊急救援管理(Emergency management)
資訊服務提供(Information service provider)
養護管理子系統(Maintenance management Subsystem) 交通管理子系統(Traffic management Subsystem) 轉乘管理(Transit management)
商用車輛管理(Commercial Vehicle administration) 付費管理(Toll administration)
污染物排放管理(Emissions management) 建檔資料管理(Archived data management) 旅行者端 遠端旅行者支援系統(Remote traveler support)
私人資訊取得系統(Personal information access)
車輛端
一般車輛(Vehicle)
緊急救援車輛(Emergency vehicle) 商用車輛(Commercial vehicle) 轉乘車輛(Transit vehicle)
養護用之工程車(Maintenance vehicle) 聯運集裝箱(Intermodal container)
道路端
道路(Roadway)
道路付費系統(Toll Collection) 停車管理系統(Parking management)
商用車輛檢驗系統(Commercial vehicle check) 聯運集散站(Intermodal terminal)
2. 車路整合發展計畫
美國近年在車路整合發展計畫,包括安全應用領域、機動性應用領域及環境 應用領域,各項領域應用目的說明如下:
(1)安全應用
安全應用目標讓車輛取得 360 度環繞的視野感知能力,在視線死角的地 方發生危險時警告駕駛者以減少可能發生的意外。例如,車輛再行經學校附 近、大幅彎度的路段或人行道旁時將被告知,而附近出現配備有IntelliDriveSM 的腳踏車或行人時則可提醒駕駛和路邊行人注意安全,或是在更危急的狀況 下,如可能發生的碰撞、前車突然煞車等狀況下提出警示。
除了「V2V 五年研究計畫草案」所規劃之應用項目,IntelliDriveSM 亦 針對高潛在危險之路口進行車路整合 安全性應用研究。車輛與道路基礎設施 的 安 全 研 究 建 立 在 USDOT 資 助 的 「 合 作 式 十 字 路 口 防 撞 系 統 」 計 畫 (Cooperative Intersection Collision Avoidance System,CICAS)之上,用於車路 整合 技術的重點是預防高死亡率和高傷害率的事故類型,包括十字路口碰 撞、小巷道碰撞、高速碰撞、商用車碰撞。
車路整合技術在經過調查後,預計提供的介面將基於DSRC 的應用與開 放平台式的概念,內容包含提供車載資訊與建議、碰撞前警告駕駛即將發生 的狀況、先發制人的車輛自動控制。
(2)機動性應用
美國公路使用者每年平均需耗費長達 42 億小時塞車在公路上,2007 年 因此被浪費掉的燃油和損失的生產力總共是 872 億美元,平均一個人需負擔 超過750 美元。為了減少旅行時間延遲所造成的浪費,移動應用便因應而生,
其針對特定時間有數以千計的車輛同時使用運輸系統時,提供一個連結來匿 名傳送大量的旅行資訊,而這些資訊是可以幫助交通運輸部門來做監控並管 理整個運輸系統的效率。例如:調整交通號誌、派遣維修人員或緊急服務等,
以儘可能有效的利用各項資源。
從政府機關的角度來看,利用IntelliDriveSM 探偵車以及道路基礎設施可 供交通管理中心(Traffic Management Center,TMC)蒐集關於交通安全及路面 性能等其他有價值的訊息詳細的數據,例如路面坑洞偵測、天氣狀況(潮濕或 結冰路面等),作為長期規劃和短期的措施,運輸部門將能更有效地管理運輸 資產,同時豐富的資料庫可提供研究人員用於解決目前的問題。由 USDOT 資 助的移動性應用,研究目標如下:
a. 於所有道路中獲取完整且即時的資訊(包括來自車輛、行動裝置與道路 設施)以強化運輸系統效率。
b. 藉由車輛與周邊建設的聯繫達到良好的運輸管理效率。
c. 實現「次世代」的電子付費機制以增加運輸系統效率。
(3) 環境應用
根據德州運輸研究所的統計,在2007 年全美所浪費掉的燃油達 28 億加 侖,在環境應用中,車輛提供交通壅塞和其他旅行狀況等即時資訊的同時可 幫助他們做出更明智的決策,並減少對環境的影響,例如使用者可能在得知 路段壅塞時,選擇替代道路或大眾運輸,或是重新安排他們的行程,這些都 可以使他們的旅行更加省油和環保,車輛在與道路設施溝通的過程當中,也 可取得號誌資訊來最佳化其駕駛的速度,減少不必要的煞車動作和廢氣的排 放。
2.1.2 歐盟地區
1. 歐盟ITS 架構
依 據 歐 盟 智 慧 型 運 輸 系 統 官 方 網 站 及 相 關 智 慧 型 運 輸 發 展 網 站 (http://calm.its-standards.info/)所公告相關 ITS 架構圖中亦與美加地區相同,可 分為四個主要系統,包括中心端(Central ITS sub-system)、旅行者端(Personal ITS sub-System)、車輛端(Vehicular ITS sub-System)以及路側(Roadside ITS sub-system),說明智慧型運系統四個主要系統間的資訊流,並透過 ITS Station 進行交通協調管理與資訊服務,其中ITS Station 系統應用架構可透過不同模 組化設計,提供中心、人、車及路(Central, Personal, Vehicle and Roadside ITS Station)不同運用。
而ITS Station 運用概念如圖 2-3 所示,可透過 ITS Station 連結不同網路,
包括透過核心網路(Core Networks)連線私有網路(Private Access Network)與公 共 網 路(Public Access Network) , 並 利 用 基 礎 設 施 網 路 (ITS Infrastructure Network) 及 隨 意 網 路 (ITS Ad Hoc Network) 連 結 區 域 網 路 (Local Data Network),並以點對點通訊(Peer to Peer Communications)實現中心、車、路及 人間資訊傳送。而歐盟所提出的Cooperative Vehicle-Infrastructure System(CVIS) 計畫,其目標即為期望實現如圖2-4 所示。
資料來源:http://calm.its-standards.info
圖2-3 ITS Station 運用圖拓概念圖
資料來源:http://calm.its-standards.info/
圖2-4 CVIS 點對點資訊傳送示意圖
圖2-4 為 CVIS 計畫中點對點資訊傳送示意圖,期望建立一個車輛資訊平 台使車輛將可以直接與路況溝通,包括車與車、車與人、車與資訊發布系統、
車與控制中心,只需要通過簡單的紅綠燈、十字路口或者是其他基礎設施上 的接受器模組,就能直接獲得最新路況或了解路段上的潛在危險。
此系統奠定即時路況訊息傳遞之基礎。這個項目計畫在德國經過測試 後,將廣泛應用於道路基礎設施中。
2. 車路整合發展計畫
歐盟車路協同整合計畫「ITS Development and Deployment in Europe:
Today and tomorrow」指出歐盟協同 ITS 中的發展進程,主要可以分成三個部 分,首先為研究與設計(Research & Design),接著為預先部署(Pilots and Pre-deployment),最後是建置平台介面。
歐盟經由上述多個計畫項目,逐步完成歐盟車路整合計畫。以下分別說 明各計畫的運作內容。
A. eCoMove 是一項整合計畫(integrated project),目的為透過系統開發解決道 路交通能源效率的問題,此計畫除了協助駕駛者消除不必要的燃油消耗(例 如:二氧化碳排放量),此外,也協助道路管理者以最節能的方式進行交通管 理。整合性的協同系統將使用車輛基礎設施的通訊方式降低 20%的整體燃油 消耗。因此eCoMove 為 Compass4D 提供了重要的基礎。
B. Compass4D,主要著重於三個服務項目:
(1)增加駕駛者的安全和舒適性 (2)降低道路交通事故件數及嚴重性
(3)避免塞車和車輛排隊等候長度。除此之外,Compass4D 會透過降低車輛二 氧化碳排放和燃料消耗的方式,對改善當地環境有正面的改善。針對駕駛者 安全所開發的的應用程序包括下列三項:
a. 闖紅燈警告(The Red Light Violation Warning, RLVW):RLVW 利用發送訊息 以增加駕駛者在路口的警覺性,藉此降低事故數量或是事故的嚴正程度。
此服務將針對特殊情況對駕駛者進行警告,例如:提醒其他車輛,緊急車 輛接近或有車輛闖越紅燈。
b. 道路危險警示(The Road Hazard Warning, RHW):當駕駛者接近危險路段(例 如:障礙物、壅塞路段)時,發送訊息以增加駕駛者的警覺性。
c. 高效節能的路口(The Energy Efficient Intersection, EEI):降低車輛在路口的能 源使用和排放。部分車輛(包括重型貨車、緊急車輛、大眾運輸車輛)在接近 號誌化路口時,將有優先號誌使其順利通行,以避免車輛停等和延滯。而此 訊息亦會提供給車輛駕駛,當駕駛者接收到路口燈號狀態及時制轉換時間 時,可適時的調整行駛速度。
d. GST 是歐盟資助的整合計畫項目,旨在為汽車訊息服務建立一個開放且標準 化的端到端(end-to-end)的汽車遠程通訊服務架構,執行期間為 2004 年 3 月至 2007 年 2 月。無論車輛行駛於歐洲的何處,駕駛者和乘客皆可以利用車上通 訊系統得到由GST 提供的動態安全資訊,提高行車效率、增加服務舒適度。
3. 歐盟車路整合應用
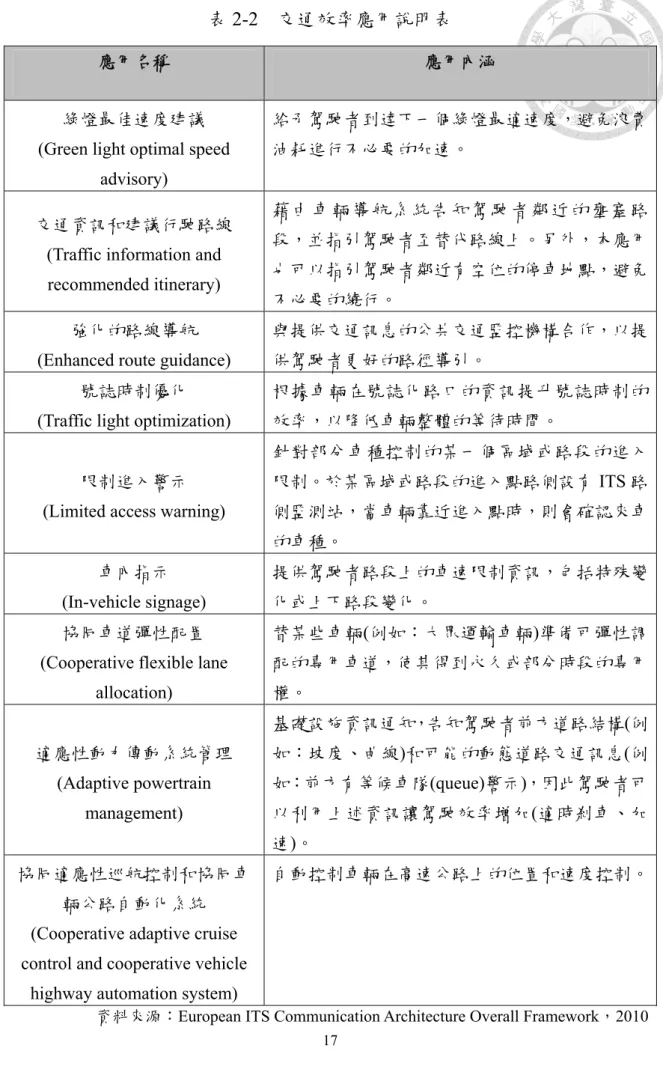
根據2010 年 European ITS Communication Architecture Overall Framework 研究報告中針對車路整合的應用項目(Applications)分成三個領域說明。應用 (Application)是針對 ITS 使用者開發的一般性服務(general service)。主要應用 領域共可區分為交通安全相關應用、交通效率相關應用及加值服務相關應用 三大領域,而以交通效率與本案相關性最告,故擷取此部分說明。
與交通效率相關的應用程序其共同目標為提高道路交通的效率、減少道 路交通擁塞和降低車輛油耗。此應用可透過提供訊息給道路經營者、交通管 理中心或駕駛者達成。下表為應用名稱和簡述。交通效率的應用項目包括綠 燈最佳速度建議、交通資訊和建議行駛路線、限制進入警示等等。
表2-2 交通效率應用說明表
應用名稱 應用內涵
綠燈最佳速度建議 (Green light optimal speed
advisory)
給予駕駛者到達下一個綠燈最適速度,避免浪費 油耗進行不必要的加速。
交通資訊和建議行駛路線 (Traffic information and recommended itinerary)
藉 由 車 輛 導 航 系 統 告 知 駕 駛 者 鄰 近 的 壅 塞 路 段,並指引駕駛者至替代路線上。另外,本應用 也可以指引駕駛者鄰近有空位的停車地點,避免 不必要的繞行。
強化的路線導航 (Enhanced route guidance)
與提供交通訊息的公共交通監控機構合作,以提 供駕駛者更好的路徑導引。
號誌時制優化 (Traffic light optimization)
根據車輛在號誌化路口的資訊提升號誌時制的 效率,以降低車輛整體的等待時間。
限制進入警示 (Limited access warning)
針對部分車種控制的某一個區域或路段的進入 限制。於某區域或路段的進入點路側設有ITS 路 側監測站,當車輛靠近進入點時,則會確認來車 的車種。
車內指示 (In-vehicle signage)
提供駕駛者路段上的車速限制資訊,包括特殊變 化或上下路段變化。
協同車道彈性配置 (Cooperative flexible lane
allocation)
替某些車輛(例如:大眾運輸車輛)準備可彈性調 配的專用車道,使其得到永久或部分時段的專用 權。
適應性動力傳動系統管理 (Adaptive powertrain
management)
基礎設施資訊通知,告知駕駛者前方道路結構(例 如:坡度、曲線)和可能的動態道路交通訊息(例 如:前方有等候車隊(queue)警示),因此駕駛者可 以利用上述資訊讓駕駛效率增加(適時剎車、加 速)。
協同適應性巡航控制和協同車 輛公路自動化系統 (Cooperative adaptive cruise control and cooperative vehicle
highway automation system)
自動控制車輛在高速公路上的位置和速度控制。
資料來源:European ITS Communication Architecture Overall Framework,2010
2.1.3 日本
日本車路整合發展概況中,車路互動應用以Smartway 為服務核心。日本推動 Smartway 主要目標是建立一個車路之間能互相溝通的交通環境,利用車路之間的 溝通協調,有效避免並降低意外事故發生。相關服務包括:前方路況資訊與障礙 物通知、合併道路切入輔助資訊、行車安全與導航地圖整合資訊、停車場管理、
無線網路接取等項目。
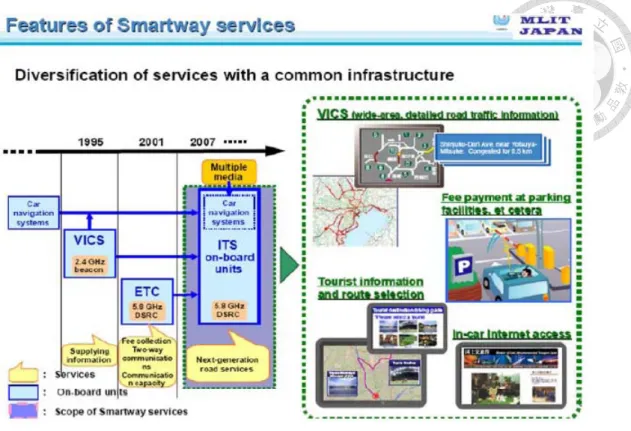
Smartway 計畫之目的在於整合日本各項 ITS 之功能(尤其 VICS 與 ETC)及建 立車上單元之共同平台,使道路與車輛能藉由 ITS 資訊的雙向傳輸而成為聰明道 路(Smartway)與聰明車輛(Smartcar),期望 2010 年於全日本普及。2009 年起將於 日本三大都會區進行實驗。而 Smartway 與 VICS、ETC 相互關係之說明圖如圖 2-5 所示,日本希望能發展一個共用的資通訊平台的基礎架構,透過此架構可以提 供各種不同的 VICS、ETC 或 ITS 服務。故其發展方向為能透過一個智慧型車載 (OBU)元件:如車載機或智慧型手機,經由無縫隙通訊網路(或 DSRC)提供各種不同 的車路整合服務訊息給用路人。
資料來源:99-TDB001 車路整合系統發展趨勢與 ITS 節能減碳關聯之研究
圖2-5 Smartway 與 VICS、ETC 關係圖
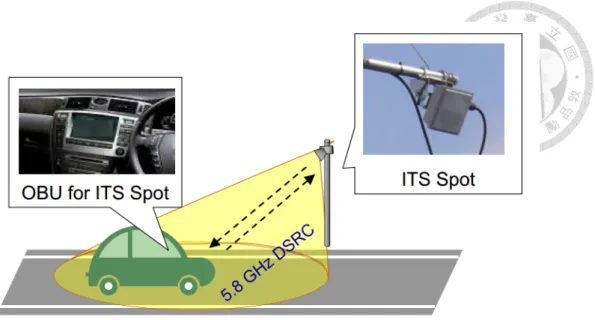
日本國土交通省道路局網(http://www.mlit.go.jp/road/road_e/kc2 _evolution.html) 在 ITS 車路通訊之間的發展,除原有 Vehicle Information and Communication System(VICS)系統發展架構外,於 2009 年開始將 5.8 GHz 的 DSRC 功能服務導入 OBU 中,並於 2011 開始在路側建置具 5.8 GHz 通訊功能的 ITS Spot,如圖 2-6 所 示。藉由ITS Spot 及 OBU for ITS Spot 設置實現車與路間通訊,以提供傳輸 ITS 基礎道路資訊中需要較大頻寬的資訊服務。
資料來源:http://www.mlit.go.jp/road/road_e/03key_challenges/2-4.pdf
圖2-6 日本未來交通資訊管理服務系統架構圖
ITS JAPEN 中的車路整合策略:日本發展經驗(V2I Strategy: Experiences in Japan Bridging Tokyo and Detroit)中主要討論協同系統(Cooperative systems)的發展 與佈署、交通資料蒐集和ITS 綠色安全(ITS Green Safety) 三個項目。與本案相關 的為交通資料蒐集。
根據圖 2-7 說明傳統的交通資訊系統利用固定式偵測器蒐集資訊並傳送至交 通控制中心,經過資料分析與處理後再回傳至路側設備,其缺點為資料來源較少,
資料蒐集僅有部分設有偵測器的點位,其他未設置偵測器的地點,則無即時資料 可發布給使用者。
移動式偵測系統則利用車對路及相關基礎設施之通訊方式,蒐集各方交通資 訊,優點為能建置更精確、更完善之交通資訊平台,透過交通資訊匯集與分析,
開發智慧化交通控制系統。
資料來源:European ITS Communication Architecture Overall Framework,2010
圖2-7 Big Data 應用於車路整合系統概述
2.1.4 國內車路整合應用發展
運研所於100 年 i3 travel 愛上旅遊計畫提出創新(innovative)的思維與理念,智 慧化(intelligent)的資訊與服務,旅遊與生活樂趣的 i3 Travel 理念。並以國內目前最 熱門的國家風景區-日月潭國家風景區為對象,透過「資訊整合」與「主動服務」
概念,提供即時的適地性(LBS)交通旅遊資訊、優質的無縫公共運輸服務。
因應日月潭平常日交通順暢,僅國定假日或週末假期壅塞之情形,配合日管 處舉辦大型活動時,提供行動式交通管理資訊發布系統功能,規劃資訊發佈之路 側設備,進行情境設計、規劃資訊發布CMS 顯示內容。其所構建既有交通管理示 範系統架構圖如圖2-8。包含運研所主機與相關交控中心(高速公路局、公路總局、
公路總局埔里工務段、南投縣交控中心)進行資料蒐集、運研所主機進行交通管理 策略與控制模式運作、資料發布至交控中心等項目,並依據分析選擇適當的路側 設備進行資料蒐集與協調控制。系統內部架構規劃內容包含交通資料蒐集、交通
管理策略與控制模式資料處理(資訊產生)以及資訊發布等三大部分。
路段車流壅塞狀況 預測模式 車流導引與分流模式
資料庫
資料蒐集 即時監控
訊息發布/確認
10
交控資料庫 反應計畫
資料收集 即時監控 CMS控制 既有設備 高速公路交控中心/公路總局/埔里工務段/
交控資料庫 交控核心
資料收集
即時監控 CMS控制
既有設備
南投縣交控中心 I3平台WEB網頁確認
既有設備 Web Service 介面
記錄協控策略 執行過程 主機
平板電腦/WEB 操作介面 手動發布交
管與大眾運 輸接駁資訊
XML 介面 XML
介面
資料來源:i3 Travel 愛上旅遊-交通管理與資訊服務示範計畫,2011 年
圖2-8 行動式交通管理資訊發布系統架構圖
2.2 無線通訊技術
近場資訊系統路側設備依其偵測性質、環境條件、準確度之需求、外觀及造 價等相關因素而有許多不同的選擇種類,在近場資訊系統路側設備資料蒐集應用 方面,則可分為即時偵測資料的近場資訊系統路側設備、一般偵測車輛資料的近 場資訊系統路側設備及特殊目的的近場資訊系統路側設備等三種。即時偵測資料 的近場資訊系統路側設備係於車輛通過時,即將該秒鐘所通過車輛之編號與通過 地點回報給接收端設備,也就是以秒為單位,現場即時偵測並回報每秒鐘通過該 偵測器之所有通過時間、車輛編號與通過地點。
參考國外車路整合交通資訊服務及弱勢用路人交通安全應用發展,可了解在
人、車輛與路側設施之間的相互通訊技術,除GPRS/3G 的廣域網路外,尚包含近 場通訊技術,如Wi-Fi(IEEE 802.11b&g)通訊技術。
目前國內近場通訊技術並非僅有 Wi-Fi,尚有藍芽(IEEE802.15.1),且 Wi-Fi 及藍芽常見於各種手機、電腦產品及生活運用中,於市場上的普及性高。因此本 案將以Wi-Fi 及藍芽為主要應用。以下將針對運作機制及理論適用範圍簡要說明介 紹。
2.2.1 Wi-Fi
Wireless Fidelity(簡稱 Wi-Fi)泛指符合 802.11、802.11a、802.11b 和 802.11g 無 線通訊標準製作出的WMAN 通訊器材。802.11 是由 IEEE 所制定的無線通訊標準。
Wi-Fi 的設置至少需要一個 Access Point 和一個或一個以上的 Client。AP 每 100ms 將 SSID(Service Set Identifier)經由 Beacons(信號台)封包廣播一次,Beacons 封包的傳輸速率是1 Mbit/s,並且長度相當的短,所以此廣播動作對網路效能的影 響不大。Wi-Fi 規定的最低傳輸速率是 1 Mbit/s,所以確保所有的 Wi-Fi client 端都 能收到這個SSID 廣播封包,Client 可以藉此決定是否要和這一個 SSID 的 AP 連線。
使用者亦可設定要連線到哪一個SSID,以進行雙向通訊。
Wi-Fi 直 連 ( 英 語 : Wi-Fi Direct) , 之 前 曾 被 稱 為 Wi-Fi 點 對 點 (Wi-Fi Peer-to-Peer),是一套軟體協定,讓 Wi-Fi 裝置可以不必透過無線網路基地台 (Access Point),以點對點的方式,直接與另一個 Wi-Fi 裝置連線,進行高速資料 傳輸。
Wi-Fi Direct 具備直接點對點簡易快速連接的特性 Wi-Fi Direct 是一種架構在 既有 Wi-Fi 802.11a/b/g/n 規格基礎的軟體層協定,它無須硬體實作,只需要既有
Wi-Fi 晶片供應商提供 Wi-Fi Direct 驅動程式,以軟體的功能疊加上去即可。其特 點在於:1.隨時直接連線,不需要無線存取點(Wi-Fi AP)。2.自動搜尋裝置,無須 輸入SSID。3.使用 WPS 執行編碼過的安全設定。4.類似藍牙一樣容易配對及連線。
Wi-Fi Direct 跟既有 Wi-Fi 基礎架構的裝置相容,不僅可使用標準的 Wi-Fi 協定 (801.11a/b/g/n),Wi-Fi Direct 可以連接非 Wi-Fi Direct 的裝置,也可以連接網際網 路與Wi-Fi 裝置;所有既有的 Wi-Fi 裝置只要更新支援 Wi-Fi Direct 功能的驅動程 式或工具程式,都能啟動並應用Wi-Fi Direct 連接;像博通(Broadcom)以及其他無 線晶片供應商,會提供跨作業系統的Wi-Fi Direct 驅動程式。
Wi-Fi Direct 將進一步驅動下一代 Wi-Fi 標準─802.11ac,與既有的 Wi-Fi 基礎 架構相容,使用的頻譜為 5.15~5.3Ghz,2013 年審核通過。傳輸速率提高到 3.2Gbps,較 802.11n 的 450Mbps 快上 6 倍之多,涵蓋面也更加寬廣,比既有的 ad-hoc 模式更快,同時也支援 WPA2 加密機制,最大傳輸距離 200 公尺,最大傳輸速度 250Mbps,支援一對一以及一對多模式。
2.2.2 藍芽(Bluetooth)
藍芽的運作原理是在 2.45GHz 的頻帶上傳輸作業,除了資料傳輸之外,也可 以傳送聲音。每個藍芽技術連接裝置都具有根據IEEE 802 標準所制定的 48-bit 地 址;傳送方式可以分成一對一或是一對多來連接,藍芽的傳輸範圍在10 公尺到 100 公尺左右,採用每秒1600 次跳頻展頻技術,同時可進行雙向通訊。
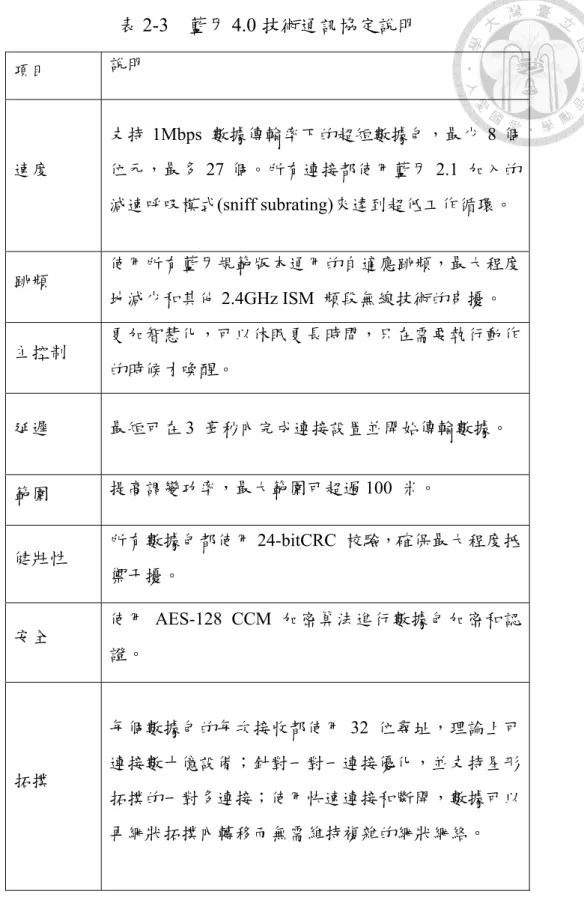
藍牙4.0 技術通訊協定包含許多特性及優點,表 3-1 將逐一說明細部內容。
表2-3 藍牙 4.0 技術通訊協定說明
項目 說明
速度
支持 1Mbps 數據傳輸率下的超短數據包,最少 8 個 位元,最多 27 個。所有連接都使用藍牙 2.1 加入的 減速呼吸模式(sniff subrating)來達到超低工作循環。
跳頻 使用所有藍牙規範版本通用的自適應跳頻,最大程度 地減少和其他2.4GHz ISM 頻段無線技術的串擾。
主控制 更加智慧化,可以休眠更長時間,只在需要執行動作 的時候才喚醒。
延遲 最短可在3 毫秒內完成連接設置並開始傳輸數據。
範圍 提高調變功率,最大範圍可超過100 米。
健壯性 所有數據包都使用24-bitCRC 校驗,確保最大程度抵 禦干擾。
安全 使用 AES-128 CCM 加密算法進行數據包加密和認 證。
拓撲
每個數據包的每次接收都使用 32 位尋址,理論上可 連接數十億設備;針對一對一連接優化,並支持星形 拓撲的一對多連接;使用快速連接和斷開,數據可以 再網狀拓撲內轉移而無需維持複雜的網狀網絡。
資料來源:EE Times 圖2-9 Bluetooth 4.0 技術的核心架構圖
Bluetooth 4.0 技術的核心架構可以參考上圖所示,圖中左半部為傳統的標準藍 牙 技 術 BR/EDR 架構,而圖中右半部則是在此版本中新增加的低耗電單工 (Bluetooth Low Energy, BLE)架構,此外最為特別就是圖中間部分的 Dual-Mode 雙 工架構。雙工架構就是將BR/EDR 架構以及 BLE 單工架構一起結合施行的模式,
在此雙工模式下系統會根據當時的環境隨時切換使用不同的傳輸方式,因此理論 上可以達到系統優化以及節省耗電量的目的。此雙工模式的架構等於是將不同的 藍牙技術相互結合(例如 v2.1+EDR 或是 v3.0 高速藍牙),用戶或是裝置可以自由切 換運行高速傳輸模式或是低耗電的運作方式。因此單工的低耗電模式就適合應用 在需要長時間連接但是不會時常傳輸數據的裝置上,而一般在PC 及手機等不同裝 置間的數據傳輸則是較適合使用雙工模式來做運行。簡單來說新的BTv4.0 技術除 了可以讓傳統標準藍牙技術、高速藍牙技術以及低耗電藍牙技術單獨運行之外,
更能夠彼此共同運用而達到"三位一體"的操作模式。
2.3 號誌控制邏輯
2.3.1 電腦號誌控制策略
交通控制號誌因應科技發展與社會需求而改變,從早期的定時控制系統演變 至今日的電腦化號誌控制系統,並輔以偵測器以及各式通訊設備加強整體系統的 即時處理功能,使得動態車流資訊與其控制概念得以引進於號誌控制策略當中,
過去十幾年間也發展出多種不同型態之號誌控制邏輯及系統。
號誌控制邏輯國內外較為廣泛應用的包含以下五種(交通部運輸研究所,
1986a;1986b):
1.定時號誌控制(Pretimed or fixed-time signal)
為最早普遍採用之號誌控制,根據歷史調查資料,將一天分成固定數時 段,以經驗法則或各種既有時制運算公式或藉時空圖繪製,或以離線運作之 套中軟體等方式運算一天中不同時段之最佳時制,由交控中心將時制計劃傳 送至路口號誌控制器,使之依照設定時間進行號誌控制。定時控制之基本要 素包含固定週期、固定時相長度以及時相數。
其不需要設置偵測器,並且容易與街道上或同一地區的號誌配合連鎖,
至今仍為國內最普遍之號誌控制方法,但是定時控制在可預測交通型態或時 常到達飽和之路口狀態較能發揮效果,缺點為無法了解時制實際運作績效,
以及無法應對不可預期之流量變化或事故。
2.觸動號誌控制(Traffic actuated signal)
為以車輛偵測器收集車流狀況,依固定或經簡單程式選擇已預設之時制
管制車流之行止。其依控制臨近路口數之多寡可分為半感應及全感應號誌兩 種。半感應號誌(即半觸動控制)於次要道路設置偵測器,使用於主要幹道交 通量穩定、次要道路之交通量變化差異甚大且無規律之路口,並且兩向交通 量懸殊之狀況;全感應號誌,於四方向路段均設置偵測器,使用於兩道路之 交通量變化均甚大且不規則情況,以偵測器計算等待車輛之排列長度或輛 數,給予適當的綠燈時間,並有最長綠燈時段之設計。
一般而言,觸動號誌控制是否能夠達到降低延滯,解決壅塞問題,有三 個重要基本時制參數:
(1)基本時段:使位於偵測器位置到路口停止線間車輛完全紓解所需時 間。
(2)單位延長時間:允許車輛從壓佔偵測器後,順利通過路口所需時間,
若欲使號誌控制效率最大,單位延長時間盡可能設短些。單位延長時 段可視為一個間距的測量設計,只要車輛連續通過偵測器之間距小於 所設定的單位延長時段,就可延長路權,但以最大綠燈為上限。國內 之號誌規劃手冊將單位延長時段之範圍訂為3~5 秒,一般之設計為 4 秒。
(3)最大綠燈時段:其目的是對綠燈時間加以限制,避免其他方向車輛產 生溢流或過於擁擠的現象。其決定方法為:最長綠燈時段=綠燈時段
×(1.25~1.50),其中綠燈時段為在定時號誌下,所計算出最佳週期之 綠燈時間。1974 年 Walter E. Schwanhausser 提了一個原則,即儘可能 使最大綠燈長些,以及使單位延長時間短些。
3.動態查表控制(Pattern Look-up or Pattern Matching signal)
將各種可能出現之交通狀況,預先利用各種可行方法建立出一套時制計
劃資料庫,設置於主控電腦或控制器中。依照車輛偵測器回傳之交通資訊,
以某一預先設定時間長度為一時段(如 10 至 15 分鐘),就其時制計劃資料庫 中擇一與該流量型態最為接近之時制計劃,據以施行控制。
4.動態計算控制(On-line Pattern Computation)
將事先校估之時制計劃最佳化套裝軟體設置於控制中心電腦中連線運 作,再將偵測器所傳回之當時交通狀況資訊,經過分析、統計與預測程序產 生預測流量後,再運用前述軟體進行線上運算,儘可能在短時間內(如 5 至 15 分鐘)計算出整套時制計劃。根據相關文獻,動態查表與動態計算皆適用 於路段或路網中之車輛,其流量波動較大、較不穩定的交通狀況,而兩者最 大的差別在於動態查表適用於群組中路口較多的群組,此因路口數多時,若 採動態計算,運算時間甚長。
5.適應性控制(Adaptive Control)
針對每一路口各方向偵測器回傳之交通資訊,考慮各方向之流量高低與 等候車輛長度,經由依綠燈時間分配邏輯之分析計算後,將下個週期之整套 時制計劃制訂出來,而使整體交通流之獲益(Gain)達到最大,同時其損失 (Loss)為最小。
目前為止已有多種適應性控制策略被發展出來,就決策邏輯而言,可分 為兩大類型:二元決策過程以及程序性決策過程,二元決策過程是指將號誌 控制時間,分割成短至二秒之極小連續時段,在每個短暫時段中,只決定目
前綠燈時間是否延長或中止之決定,其依據為根據延長一個短時段綠燈時間 所可能獲致的利益,與本時段綠燈時間結束後中止所可能導致的損失,從事 損益權衡分析(trade-off Analysis)之結果;程序性決策過程是指將最佳化時制 決策的考慮時段延長至未來某段較長的期間(如 50 秒至 100 秒),並將此段時 段劃分為若干小時段,決策時所考慮的問題不僅在本時段結束後是否終止目 前綠燈,還包括在該較長期間之任何時段結束現行綠燈,以及後續綠燈時相 又應延長多久的多元決策問題。這兩種決策過程所產生的控制邏輯分別有以 下幾種邏輯:
(1)二元決策過程
Miller’s Algorithm 米勒演算法(Miller,1963)
Traffic Optimization Logic, TOL 交通最佳化邏輯(Lin,1988)
Modernised Optimised Vehicle Actuation, MOVA 現代化最佳之車輛 觸動邏輯(Vincent et al.,1986)
Stepwise Adjustment of Signal Timing, SAST 號誌時制逐步調整法
Computerized Dynamic Traffic Control System-Ⅲ, COMDYCS-Ⅲ 第 三代電腦化全動態交通控制系統
Dynamic Intersection Signal Control Optimization, DISCO 動態路口 號誌控制最佳化
A real-time traffic signal control system:architecture, algorithms, and analysis (RHODES)
(2)程序性決策過程
Optimization Policies for Adaptive Control, OPAC 適應控制之最佳化 策略(Gartner,1983)
Traffic adaptive control for oversaturated intersections, TACOS 過飽
和路口之交通適應性控制(Hong and Panos,2004)
由於OPAC 模式在電腦系統及運作方式上適合在微處理機中執行,在獨 立路口之應用為分散式控制,不需要交控中心之設置,張智華(2004)結合 OPAC 之計算延滯流程,以及水平推移法,並加入競爭時相之計算,發展新 的兩階段水平推移法以降低先期車輛資訊的誤差為方向,減少偵測器誤差對 系統績效計算之影響。
交通部運研所於民國 90 年進行號誌控制邏輯之標準化研究,其主要應 用於交控中心之控制決策,以系統分析方法加以檢討,研擬標準化之交通控 制流程與交控邏輯,以及相對應的控制參數與門檻水準。其提出各種交控策 略之應用層級架構如圖 2.10 所示,其中門檻之決定是由模擬績效決定,即 時模擬流量計算延滯容易產生較大之誤差,並且也會花費許多時間,此種方 法屬於決策前之工作,不適合在號誌控制器進行。在動態計算產製時制方法 中,分別使用SOAP 模式、PASSER 及 TRANSYT 套裝軟體來輔助。
定時控制策略 (獨立路口、幹道、網路) 動態查表號誌控制策略
(獨立路口、幹道、網路)
半觸動號誌控制策略 (一般用於獨立路口) 動態計算號誌控制策略
(獨立路口、幹道、網路)
全觸動號誌控制策略 (獨立路口) 適應性號誌控制策略
(獨立路口、幹道、網路) 全動態
動態
定時
先進
基礎
圖2-10 交控策略之應用層級架構圖
2.3.2 電腦號誌控制系統
電腦號誌控制系統為使用交控軟體介面處理動態資料,以控制路端設備,而 較廣為人知的交通控制軟體有 TRANSYT、PASSER-Ⅱ、SOAP、SIGOP-Ⅲ、
MAXBAND 等,而國內使用於獨立路口之交控軟體為修改 SOAP-84 之程式邏輯、
相關交通參數及車流行為,以符合台灣交通特性之軟體,幹道交控軟體則以 PASSER-Ⅱ為主,而網路交控軟體則以 TRANSYT-7F 及 SIGOP 為主,以下僅介紹 可應用在獨立路口之交通控制軟體。
1.SOAP(Signal Operation Analysis Program):
由美國佛羅里達大學運輸研究中心於1984 年修訂完成,所以稱作 SOAP-84。
主要是針對獨立路口狀況提供最佳週期、時比及時相型態,以及決定執行時制計 劃之許多評估指標,係以搜尋程序法,以延滯值與停等次數組合之績效值最低為
目標。
SOAP-84 自從引入國內後,即有許多相關研究,主要研究改良成果如下:
(1)發現 SOAP-84 會產生小流量大週期之缺點,並研究以限制臨界點的方式來 加以改善。
(2)將 Robertson 延滯推估式中的溢流時間因子納入 SOAP-84 模式內,使延滯 的推估差異,在溢流時由312.41%降至 81.88%及由 172.86%降至 97.62%。
(3)原程式對路口的到達型態係假設為 Poisson 分配,此一假設並不一定符合實 際狀況,應擴增一般到達型態的推估式,以供使用者選擇。
(4)以九種常用的時相設計,利用 SOAP-84 進行模擬實驗,再依據所得結果,
構建最佳時相選擇系統。
2.TRANSYT(Traffic Network Study Tool):
TRANSYT-7F 號誌時制設計程式,是根據英國 TRRL(Tran-sportand Road Research Laborary)之 TRANSYT-7 版本修改而成,利用時間掃瞄法(Time-Scan Method)、巨觀(Macroscopic)及定性(Determin-istic)設計最佳化模式,具有模擬、最 適時制設計及評估之功能,適用於都市中之獨立路口、幹道及網路時制設計。其 最佳化過程係以最小化負效用(延滯與停等組合而成)為指標,採爬山尋優法尋找使 整體路網系統負效用最小化之時制計劃。
TRANSYT-7F 程式包括兩大基本模式,即交通流模擬模式和號誌時制最佳化 模式。交通流模擬模式主要在模擬車流在網路中之位置與號誌時制間的關係,其 中以 Robertson 的車流擴散理論為 TRANSYT-7F 模式的精華。號誌時制最佳化模 式則是利用爬山尋優法,藉著調整時差和時比,以得到最小系統績效指標與最佳 的號誌時制計劃。其模式本身僅對系統的負效用予以最佳化,因此無法對幹道的
綠燈續進帶加以考慮。
T7F-88(1988)根據 TRANSYT-7F 第五版發展而成,T-88 之 T 代表 Taiwan,
88 則是 1988 年,除保有原有功能外,並增加以下功能:
(1)以三度空間共軛方向尋優法代替原 TRANSYT-7F 爬山尋優程序,加快程式 執行速度,並改善績效指標值
(2)加入溢流的處理模式,防止溢流現象發生。
(3)固定時差功能,可供號誌連鎖續進設計之用。
(4)容忍最大延滯下支道零權數法設計,使支道在容忍某一最大延滯值下,產生 幹道優先通行之機會。
(5)路段延滯控制模式之設計,使某些常呈現特別擁擠與延滯特別高的路段,
獲得局部性改善。
3.PASSERⅡ-84(Progressive Analysis and Signal System Evaluation Routine)
PASSERⅡ-84 為德州交通處與德州農工大學(Texas A&M University)聯合發 展,主要設計適用於一般電腦及個人電腦,根據PASSERⅡ-80 加入最適化時差改 良而成,屬於巨觀、定性之最適化模式,可是用於定時控制下的獨立路口與幹道 系統。PASSERⅡ-84 的理論架構是由 John D.C. Little 的半整數同步相位理論與 Books 的干擾綠燈帶理論所演繹產生,設計準則為雙向續進帶寬和為最大,同時以 微調方式兼顧延滯之極小化,採用之延滯公式有兩個,一為Webster 延滯公式,用 來計算各路口延滯最低之綠燈時間,另一個為修正的1985HCM 延滯公式,用以計 算幹道系統之延滯及服務水準。
目前PASSERⅡ-84 已改良成 PASSERⅡ-87,其適用條件為:
(1)同時要求雙向綠燈續進寬和為最大,與幹道延滯極小化情況(不考慮支道)。
(2)利於分析臨近路段具有左轉專用路權及左轉專用時相情況。
(3)可用以限定幹道雙向綠燈續進帶寬的比例,以利解決尖峰擁擠問題。
(4)適用於路口轉向流動具有 NEMA 轉向(NEMA 路口有 12 個流動,PASSER
Ⅱ減為8 個流動)特性者,故無法處理右轉專用時相與紅燈右轉等情況。
在研究動態交通控制系統時,常以美國都市交通控制系統UTCS(Urban Traffic Control System)為例,UTCS 是由美國聯邦公路署(FHWA)發展,自 1970 年代起至 今,可分為三代系統,及後來發展的1.5 代系統,各代系統由於軟硬體之應用能力 不同,而在觀念上各不相同。
第一代系統:採離線作業方式,使用 TRANSYT-7F 程式運算歷史資料,
控制軟體可儲存40 個時制計劃,可採定時控制、控制人員控制以及查表 控制,最快15 分鐘更換一次時制。
第二代系統:保留第一代系統許多軟硬體特性,時制計劃由偵測器收集 資料,由預測程序預測下一時段交通資料,使用 SIGOPⅢ分析,以線上 即時作業方式運算得到新時制,更換時制頻率可達每五分鐘一次,然而 為了避免轉換干擾,新時制計劃每十分鐘不可執行超過一次。其擁有改 良的時制計劃轉換程式將兩時制計劃間轉換時間最小化,與估計未裝設 偵測器路口之交通量預估的程式。
第三代系統:重點在使時制計劃能隨交通量變化而隨時變動,因此完全 採線上即時作業方式,時制計劃可在 3~5 分鐘內產生。第三代系統需要 功能十分強大電腦,加上在其他設備、維護作業與相關轉換程式等方面 相當繁複。
第 1.5 代系統:為改善第一代系統無法更新時制計劃之缺點而發展,根據
偵測器所收集到的資料,評估現有時制是否適當,若不適當,則依相同 原則選出較適合的時制計劃,將不適當的時制計劃記錄供交通工程師進 行修改。此外,可在非尖峰或深夜時間,透過離線的交控軟體,自動產 生最佳時制計劃,經由交通工程師測試後,再更新資料庫中的時制計劃。
在國內交通控制系統目前發展較為完備者有 COMDYCS 及 TRUSTS 兩套系 統,與UTCS 的發展過程是類似的:
1.COMDYCS 系統
COMDYCS 為電腦化動態交通控制系統(Computerized Dynamic Traffic Control System)之簡稱,從民國七十六年開發至今已有三代系統,其系統軟體架構可區分 為靜態控制和動態控制等兩部分,動態控制又可分為動態時制產生子系統與動態 查詢/編修子系統,其中時制產生系統之功能可區分為交通感應式時制控制(包括查 表和計算)、群組預約設定控制(ACS,AreaControl Scheduling)、臨界路口控制(CIC,
Critical Intersection Control)、特殊時制控制以及定時時制控制等。
其線上計算法備有兩個最佳時制計算套裝軟體,對獨立路口使用 SOAP-84,
對幹道使用 PASSER Ⅱ-84 來建立時制計劃,後經一套研判準則,再選取較佳之 時制計劃執行。
2.TRUSTS 系統
TRUSTS(Traffic Responsive and Uniform Surveillance Timing System)是由國 人自行發展完成,以個人電腦為主的動態電腦號誌系統,可利用多工處理方式,
於每一部工作電腦上進行本身之作業或其他電腦作業之修正、發展、測試等,而 不干擾正常工作之進行。
TRUSTS 的時制產生方式有動態計算、動態查表及定時時制三種方式,所採
用的軟體為國人自行開發成功之 BANDTOP(BANDwidth of Timing Optimization Program)與 T7F-T88 兩種。BANDTOP 以雙向帶寬和最大化為目標,能得出真正存 在之鋸齒狀帶寬,如此可使在此帶寬內之車輛續進至最後一個路口,而不在續進 帶寬內之車輛最多也只需停等一次即能完成續進。T7F-T88 則是以三度空間共軛方 向搜尋法來加速程式運算速度,解決了TRANSYT-7F 求解時間過於冗長的缺點,
同時亦具有處理路段溢流問題、幹道優先通行及固定路口時差等功能。
2.4 運輸經濟理論
2.4.1 擁擠定價
道路訂價理論在運輸經濟領域是針對擁擠的路段,藉由向使用者收取適當擁 擠費的方式以減少過多的車流,並達成道路效率使用的目標。關於道路訂價和研 究方向主要可大致分成以下兩種討論:第一種為流量擁擠模式(Flow Congestion Model) 下之擁擠收費模式,即為傳統的道路擁擠收費研究,使用上及相關研究已 有許多。第二種為排隊擁擠模式(Queuing Congestion Model) 下之擁擠收費模式,
Oort(1969)認為消費者之效用水準會同時受到工作和動與休閒活動影響,應該將兩 種活動時間併入效用函數中求得單位工作時間及單位休閒時間之價值,結果為單 位工作時間價值等於單位休閒時間價值減去工資。De Serpa(1971) 首先提出區別時 間價值與節省時間價值的觀念,在其效用函數中加入預算、時間以及技術三個限 制式,以此解出時間價值、時間的影子價格以及節省時間價值。
Truong 與 Hensher(1985) 分析,雖然應用 Becher 及 De Serpa 兩位學者之模 式架構,但強調旅行時間不同於旅行成本可以儲存下來以備用,時間利用僅能從 一項活動轉移至另一相活動上使用,即從旅行活動移轉至非旅行活動。因此所謂
節省時間價值之正確意義應為移轉性時間價值。
2.4.2 時間價值
Hensher(1995)指出一般時間價值(Value of Time, VOT) 是由運具,白天時間,
旅次目的,旅次服務品質及率次產生自我特性所決定,且時間價值是無法儲存及 累加的,移動的時間價值與等待也有所不同,而無預期的延遲價值將會更昂貴。
國內外時間價值研究如表所示。
表2-4 時間價值研究文獻
作者或計畫 地區與時間 模式內容 研究結果
城 際 客 運 時 間 價值之研究
台 灣 都 市 地 區 ,
1988 年 城際運輸 70.8-103.2 元 傅祖壇與周濟 台 灣 都 市 地 區 ,
1993 年 城際運輸 台北-台中 135 元/小時 台北-高雄 89 元/小時 台 灣 地 區 旅 運
時 間 價 值 調 查 報告
台 灣 都 市 地 區 ,
1996 年 城際運輸 短程活動63.6 元/小時 中長程活動99.6,元/小時 城 際 與 都 會 旅
行 時 間 價 值 之 理 論 與 實 證 之 研究
台 灣 都 市 地 區 ,
1999 年 城際運輸
新竹—台北屢次以恰公 時 間 價 值 最 大 通 勤 次 之。新竹—高雄以恰公 時 間 價 值 最 大 休 閒 次 之。
城 際 與 都 會 旅 行 時 間 價 值 之 理 論 與 實 證 研 究
台 灣 都 市 地 區 ,
1999 年 城際運輸
以商務目的時間價值為 每小時 308 元,非商務 目的為204 元
夏皓清 台南市,2012 年 都市運輸
平 日 : 休 閒 娛 樂 活 動
(2.64 元/分鐘)>家庭照 護活動(0.66 元/分鐘)>
生理照護活動(0.51 元/
分鐘)>家務活動(0.04 元/分鐘)>社會化活動
(0.02 元/分鐘)
假 日 : 休 閒 娛 樂 活 動
(6.11 元/分鐘)>家庭照 護活動(6.08 元/分鐘)>
生理照護活動(4.58 元/
分鐘)>社會化活動(0.77 元/ 分 鐘 ) > 家 務 活 動
(0.27 元/分鐘)
資料來源:本研究整理
2.5 汽機車怠速及碳排放價格
汽車怠速的引擎轉速約為每分鐘 8000 轉,和市區道路普遍速限每小時 50 公 里相比:相差約兩倍,除了耗油以外排放的廢氣也略為增加; 根據目前國內汽車怠 轉測試:小客車停等每分鐘多增加 10.74c.c.耗油;二氧化碳排放多增加 145.14 公 克,一氧化碳排放多出1.128 公克(台大先進動力研究中心,2008)。
國際碳排放交易市場主要可分為兩類 1:(1) 配額(allowance)市場, 由總量管制 與交易方式執行,如歐盟排放交易制度(EU ETS)、美國東 北部區域溫室氣體倡議 (RGGI);(2)計畫別(project-based)市場,以個別 計畫之減量額度計算,如京都議定書 的清潔發展機制(CDM)及自願市場之 VER,其額度可供配額市場之參與者抵銷其減 量承諾。目前國際 碳排放交易市場以歐盟排放交易制度為主,CDM 市場次之。國 際碳市目前現貨平均價格約為209 元(新台幣/噸)。
2.6 文獻回顧小結
檢視歐美日在 ITS 架構的發展,可明確了解歐美日在近十年的 ITS 發展上,
早已重視人、車、路及中心間的資訊傳輸應用,因此亦已針對各自國內 ITS 發展 規劃人、車、路及中心的整合架構。近年來歐美日多數交通 ITS 計畫,多為解決
交通安全課題為導向,主要為透過短距無線通訊技術,實現車路整合(V2I、I2V) 應用,以提升交通安全。此外,亦可承擔資料蒐集工作;歐美日皆已進入場測實 驗階段。國內對於車路整合相關研究及實施尚未有指標性之計畫執行,運研所於 100 年發展之 i3 travel 愛上旅遊計畫,以智慧型運輸系統創新的思維與理念,提供 智慧化的交通資訊與服務提升旅遊與生活樂趣,目標達到提供優質低碳觀光,並 提供即時在地化交通資訊與多元化之旅行資訊服務。
無線通訊技術方面Wi-Fi 及 Bluetooth 在傳輸距離,傳輸速度以及頻寬等方面 個有其特色,在彼此不互相影響的狀況下選擇最適當之通訊技術對資料傳輸及偵 測品質有十分大的影響,以現今智慧型裝置發展而言,同時配備兩者已經是十分 普遍。因此路側設備同時裝設兩者對資料蒐集的完整度將會有顯著的助益。
張景平君(2004)提出最先進之系統並非總是最有效之系統,對一個地區實施適 當且具有成本效益之交通號誌控制系統時需十分小心,此外,當預測系統改善結 果時,評估既有交通號誌控制系統之目前狀況是重要的。若一系統目前是定時控 制,且已安裝適應性控制,那可能會有顯著的改善,但若目前系統已經相當更新,
則一般而言改善不會太大。
過去的控制策略文獻中,未有將所有控制策略以同一基準比較之文獻,也未 有明確量化標準,因此,在實際應用上,仍難實現。目前仍以定時控制為主,主 要原因也是其他控制策略尚未證實其具可靠性,而少有實際應用實例。
即時性號誌控制若使用套裝軟體實現,須要強大電腦之配合,因此,只能在 交控中心運算與決策,而線上運算的時間會受與交控中心交換資訊並在中心運算 的時間所延誤,交通部目前研究之標準化邏輯即針對兩層式之交控系統設計,路 側設備之交通資料均必須回傳至交控中心作決策,並且引用套裝軟體協助決定時