國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
應用位移李次群理論於三類不連續可動機構之 合成及運動分析
Synthesis and Motion Analysis of
Three Discontinuous Mobility Mechanisms via Displacement Lie Subgroup Theory
楊宗霓 Tsung-Ni Yang
指導教授:李志中 博士 Advisor: Jyh-Jone Lee, Ph.D.
中華民國 105 年 7 月
致謝
首先感謝指導教授李志中老師,於兩年研究期間的指導與協助,領引我並給 予指正。也感謝口試委員劉霆老師及郭進星老師,指導我從不同的角度去看事情,
幫助我更加完整我的論文。
這兩年期間,有瑋璞學姊、柏諺學長、智達學長、景棋學長的經驗分享,與 同學鼎翔、洪揚、耿勳相互討論遇到的所有問題,以及學弟福元、承原、坤祐、
宗翰的各種幫助,充實了我的碩士生涯,實驗室融洽且歡樂的氣氛使得我的校園 生活很精彩。
最重要的是要感謝我的家人及親密的朋友們,讓我能無憂地投注於碩士研究,
無限給予我很多關心與支持,因為有周遭的所有人的協助,我才能如此順利地完 成這份碩士研究論文。
應用位移李次群理論於三類不連續可動機構之 合成及運動分析
研究生:楊宗霓 指導教授:李志中 博士
摘要
不連續可動機構為具有兩種或兩種以上不可共存之運動的特殊機構。特殊桿 件幾何、接頭運動軸的方向等皆可能是產生此現象的原因。因此在眾多研究當中,
對此種機構的定義仍是眾說紛紜,合成方法也隨之而不同,進而導致部分類型之不 連續可動機構的合成方法也尚未完全發展,本文主旨在於將此種特殊機構進行有 系統的定義及分類,設法完善不連續可動機構的合成方法,並詳細說明些許案例。
本文採用李群作為機構分析及合成的運算工具,以便於快速的分析得知機構的運 作狀況,亦有考慮到合成上的需求。隨後,本文將不連續可動機構依據產生原因進 行分類,並針對其中一大類之不連續可動機構的合成方法進行整理。接著應用此合 成方法實際將符合設定之條件的機構設計出來,並利用電腦輔助設計軟體繪製出 機構模型來進行運動驗證。最後將呈現兩個擁有兩種運動模式之不連續可動機構,
以及一個具三種運動模式之不連續可動機構,且探討合成過程中所得到不符合之 案例及其不符預期之因素。
關鍵字:李群、位移群、位移李次群、不連續可動性、不連續可動機構、機構合成
Synthesis and Motion Analysis of Three Discontinuous Mobility Mechanisms via Displacement Lie Subgroup Theory
Student:Tsung-Ni Yang Advisor:Dr. Jyh-Jone Lee
Abstract
Discontinuously movable mechanisms (DMM) are special mechanisms with two or more working modes. Additionally, these modes cannot work simultaneously. Such mechanisms with these characteristics result from various reasons such as the geometry of the links and directions of the joint axes. Therefore, definitions and methods of synthesis of DMMs are wildly divided and depend on their classifications. In the virtue of diverse definitions of DMMs and indefinite synthesis method of some categories of DMMs, the purpose of this work is to systematically classify present DMMs and to develop a method of synthesis of DMMs. Several cases are discussed in detail. In order to learn the motion of the mechanisms fast, this study analyzes and synthesizes DMMs on the strength of Lie group theorem. Firstly, this paper presents the classification of DMMs according to their prime characteristics. Then, one of the classes of DMMs is analyzed on the basis of this thesis. Last but not least, the final designs, which are two DMMs with bifurcation and one with trifurcation, are modeled by a CAD software to validate their motions with discussions of the improper ones as well.
Key words: Lie group, displacement group, displacement Lie subgroup, discontinuous
mobility, discontinuously movable mechanism, mechanism synthesis目錄
摘要 ... i
Abstract ... ii
目錄 ... iii
圖目錄 ... v
表目錄 ... viii
第一章 緒論 ... 1
1.1 前言 ... 1
1.2 文獻回顧 ... 2
1.3 研究動機及目的 ... 4
1.4 論文架構 ... 4
第二章 機構之分析理論與合成方法 ... 6
2.1 李群及位移李次群 ... 6
2.2 機構運動分析方法 ... 11
2.3 新機構產生方法 ... 18
第三章 不連續可動機構 ... 21
3.1 不連續可動機構 ... 21
3.2 不連續可動機構運動分析方法 ... 24
3.3 共同特徵 ... 30
3.4 小結 ... 32
第四章 不連續可動機構之合成與分析 ... 33
4.1 設計合成方法 ... 33
4.2 合成具1/𝑆(𝑂1)及1/𝑆(𝑂2)運動模式之不連續可動機構 ... 36
4.2.2 結合原生機構 ... 37
4.2.3 改變接頭連接次序 ... 39
4.2.4 初步篩選判斷 ... 41
4.2.5 結果展示 ... 43
4.2.6 其他案例討論 ... 53
4.3 合成具1/𝐺(𝐲𝟏)及1/𝐺(𝐲𝟐)運動模式之不連續可動機構 ... 54
4.3.1 列舉原生機構 ... 54
4.3.2 結合原生機構 ... 55
4.3.3 改變接頭連接次序 ... 57
4.3.4 初步篩選判斷 ... 60
4.3.5 結果展示 ... 62
4.3.6 其他案例討論 ... 71
4.4 合成具𝑅(𝐴, 𝐱)、𝑅(𝐵, 𝐲)及𝑅(𝐶, 𝐳)運動模式之不連續可動機構 ... 72
4.4.1 列舉原生機構 ... 72
4.4.2 結合原生機構 ... 73
4.4.3 改變接頭連接次序 ... 73
4.4.4 初步篩選判斷 ... 74
4.4.5 結果展示 ... 75
4.4.6 其他案例討論 ... 78
4.5 小結 ... 79
第五章 結論與未來展望 ... 80
5.1 結論 ... 80
5.2 未來研究方向 ... 81
參考文獻 ... 82
圖目錄
圖 2. 2 位移李次群階層關係圖[7] ... 10
圖 2. 3 產生平面運動{𝐺(𝐰)}之等效運動鏈 [7] ... 12
圖 2. 4 雙平面運動鏈 [7] ... 13
圖 2. 5 {𝑋(𝐮)}{𝑋(𝐯)}運動鏈 [14] ... 14
圖 2. 6 歐丹聯軸器 [10] ... 15
圖 2. 7 4𝑅2𝑃聯軸器 [15] ... 16
圖 2. 8 五腳並聯機構 [13] ... 17
圖 3. 1 混合型球面及球面7𝑅不連續可動機構 [19] ... 24
圖 3. 2 6𝑅不連續可動機構 [20] ... 26
圖 3. 3 平面及平面8𝑅不連續可動機構 [21] ... 27
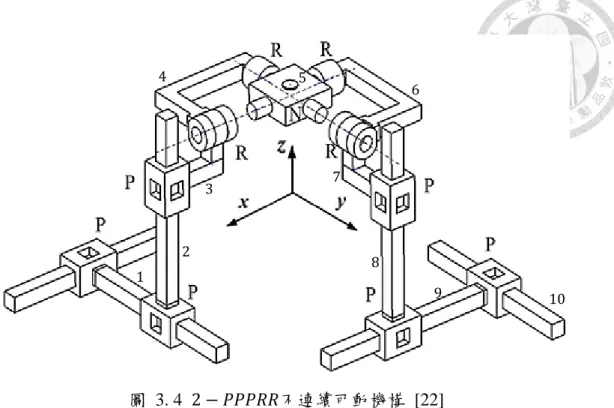
圖 3. 4 2 − 𝑃𝑃𝑃𝑅𝑅不連續可動機構 [22] ... 29
圖 3. 5 不同組成之6𝑅不連續可動機構 ... 31
圖 4. 1 不連續可動機構合成流程圖 ... 33
圖 4. 2 𝑅𝐯𝟏𝑂𝑅𝐯𝟐𝑂 ∗ 𝑅𝐯𝟒𝑂 𝑅𝐯𝟑𝑂機構 ... 36
圖 4. 3 𝑅𝐯𝟏𝑂𝑅𝐯𝟐𝑂 𝑅𝐯𝟑𝑂 ∗ 𝑅𝐯𝟒𝑂機構 ... 37
圖 4. 4 組合機構之𝑅𝐰𝑂 插入範例 ... 39
圖 4. 5 交錯機構之𝑅𝐰𝑂 插入範例 ... 41
圖 4. 6 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐮𝑂𝟐1𝑅𝐯𝑂𝟐2 ∗ 𝑅𝐰𝑂𝑅𝐮𝑂𝟑1𝑅𝐯𝑂𝟑2機構於分歧點位置 ... 43
圖 4. 7 進入{1/𝑆(𝑂1)}運動模式 ... 44
圖 4. 8 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐮𝑂𝟐1𝑅𝐯𝑂𝟐2 ∗ 𝑅𝐰𝑂𝑅𝐮𝑂𝟑1𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂1)}之端效器運動坐標 ... 45
圖 4. 9 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐮𝑂𝟐1𝑅𝐯𝑂𝟐2 ∗ 𝑅𝐰𝑂𝑅𝐮𝑂𝟑1𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂1)}之接頭運動狀態 ... 45
圖 4. 10 進入{1/𝑆(𝑂 )}運動模式 ... 46
圖 4. 11 𝑅𝐮𝑂𝟏1RO𝐯𝟏2𝑅𝐮𝑂𝟐1𝑅𝐯𝑂𝟐2∗ 𝑅𝐰𝑂𝑅𝐮𝑂𝟑1𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂2)}之端效器運動坐標 ... 47
圖 4. 12 𝑅𝐮𝑂𝟏1R𝐯O𝟏2𝑅𝐮𝑂𝟐1𝑅𝐯𝑂𝟐2∗ 𝑅𝐰𝑂𝑅𝐮𝑂𝟑1𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂2)}之接頭運動狀態 ... 47
圖 4. 13 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐯𝑂𝟐2𝑅𝐮𝑂𝟐1 ∗ 𝑅𝐮𝑂𝟑1𝑅𝐰𝑂𝑅𝐯𝑂𝟑2機構於分歧點位置 ... 48
圖 4. 14 進入{1/𝑆(𝑂1)}運動模式 ... 49
圖 4. 15 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐯𝑂𝟐2𝑅𝐮𝑂𝟐1 ∗ 𝑅𝐮𝑂𝟑1𝑅𝐰𝑂𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂1)}之端效器運動坐標 ... 49
圖 4. 16 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐯𝑂𝟐2𝑅𝐮𝑂𝟐1 ∗ 𝑅𝐮𝑂𝟑1𝑅𝐰𝑂𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂1)}之接頭運動狀態 ... 50
圖 4. 17 進入{1/𝑆(𝑂2)}運動模式 ... 51
圖 4. 18 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐯𝑂𝟐2𝑅𝐮𝑂𝟐1 ∗ 𝑅𝐮𝑂𝟑1𝑅𝐰𝑂𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂2)}之端效器運動坐標 ... 51
圖 4. 19 𝑅𝐮𝑂𝟏1𝑅𝐯𝑂𝟏2𝑅𝐯𝑂𝟐2𝑅𝐮𝑂𝟐1 ∗ 𝑅𝐮𝑂𝟑1𝑅𝐰𝑂𝑅𝐯𝑂𝟑2機構於{1/𝑆(𝑂2)}之接頭運動狀態 ... 52
圖 4. 20 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑅𝐲𝐶𝟏𝑇𝐯𝟏∗ 𝑅𝐲𝐹𝟐𝑇𝐯𝐜𝑅𝐲𝐷𝟏機構於分歧點位置 ... 62
圖 4. 21 進入{1/𝐺(𝐲𝟏)}運動模式 ... 63
圖 4. 22 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑅𝐲𝐶𝟏𝑇𝐯𝟏∗ 𝑅𝐲𝐹𝟐𝑇𝐯𝐜𝑅𝐲𝐷𝟏機構於{1/𝐺(𝐲𝟏)}之端效器運動坐標 ... 64
圖 4. 23 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑅𝐲𝐶𝟏𝑇𝐯𝟏∗ 𝑅𝐲𝐹𝟐𝑇𝐯𝐜𝑅𝐲𝐷𝟏機構於{1/𝐺(𝐲𝟏)}之接頭運動狀態 ... 64
圖 4. 24 進入{1/𝐺(𝐲𝟐)}運動模式 ... 65
圖 4. 25 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑅𝐲𝐶𝟏𝑇𝐯𝟏∗ 𝑅𝐲𝐹𝟐𝑇𝐯𝐜𝑅𝐲𝐷𝟏機構於{1/𝐺(𝐲𝟐)}之端效器運動坐標 ... 66
圖 4. 26 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑅𝐲𝐶𝟏𝑇𝐯𝟏∗ 𝑅𝐲𝐹𝟐𝑇𝐯𝐜𝑅𝐲𝐷𝟏機構於{1/𝐺(𝐲𝟐)}之接頭運動狀態 ... 66
圖 4. 27 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑇𝐯𝟏𝑅𝐲𝐶𝟏∗ 𝑅𝐲𝐷𝟏𝑅𝐲𝐹𝟐𝑇𝐯𝐜機構於分歧點位置 ... 67
圖 4. 28 進入{1/𝐺(𝐲𝟏)}運動模式 ... 68
圖 4. 29 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑇𝐯𝟏𝑅𝐲𝐶𝟏∗ 𝑅𝐲𝐷𝟏𝑅𝐲𝐹𝟐𝑇𝐯𝐜機構於{1/𝐺(𝐲𝟏)}之端效器運動坐標 ... 68
圖 4. 30 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑇𝐯𝟏𝑅𝐲𝐶𝟏∗ 𝑅𝐲𝐷𝟏𝑅𝐲𝐹𝟐𝑇𝐯𝐜機構於{1/𝐺(𝐲𝟏)}之接頭運動狀態 ... 69
圖 4. 31 進入{1/𝐺(𝐲𝟐)}運動模式 ... 70
圖 4. 32 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑇𝐯𝟏𝑅𝐲𝐶𝟏∗ 𝑅𝐲𝐷𝟏𝑅𝐲𝐹𝟐𝑇𝐯𝐜機構於{1/𝐺(𝐲𝟐)}之端效器運動坐標 ... 70
圖 4. 33 𝑅𝐲𝐵𝟏𝑅𝐲𝐸𝟐𝑇𝐯𝟏𝑅𝐲𝐶𝟏∗ 𝑅𝐲𝐷𝟏𝑅𝐲𝐹𝟐𝑇𝐯𝐜機構於{1/𝐺(𝐲𝟐)}之接頭運動狀態 ... 71
圖 4. 34 𝑅𝐱𝐴1∗ 𝑅𝐱𝐴2機構 ... 72
圖 4. 35 𝑅𝐱𝐴1𝑅𝐲𝐵1𝑅𝐳𝐶1∗ 𝑅𝐱𝐴2𝑅𝐲𝐵2𝑅𝐳𝐶2機構於分歧點位置 ... 76
圖 4. 36 𝑅𝐱𝐴1𝑅𝐲𝐵1𝑅𝐳𝐶1∗ 𝑅𝐱𝐴2𝑅𝐲𝐵2𝑅𝐳𝐶2機構之{𝑅(𝐴, 𝐱)}運動軌跡 ... 76
圖 4. 37 𝑅𝐱𝐴1𝑅𝐲𝐵1𝑅𝐳𝐶1∗ 𝑅𝐱𝐴2𝑅𝐲𝐵2𝑅𝐳𝐶2機構之{𝑅(𝐵, 𝐲)}運動軌跡 ... 77
圖 4. 38 𝑅𝐱𝐴1𝑅𝐲𝐵1𝑅𝐳𝐶1∗ 𝑅𝐱𝐴2𝑅𝐲𝐵2𝑅𝐳𝐶2機構之{𝑅(𝐶, 𝐳)}運動軌跡 ... 78
表目錄
表 2. 2 李代數結構對速度場之表示式 [4] ... 7
表 2. 3 位移李次群之運動描述 [5] ... 9
表 2. 4 常用接頭與李次群之對應 ... 10
表 2. 5 𝑋運動基本開放鏈 [9] ... 19
表 2. 6 含反向排列之𝑋運動基本開放鏈 ... 20
表 4. 1 去除一旋轉接頭之{1/𝑆(𝑂1)}及{1/𝑆(𝑂2)}原生機構 ... 38
表 4. 2 去除一旋轉接頭之{1/𝑆(𝑂1)}及{1/𝑆(𝑂2)}簡寫原生機構 ... 38
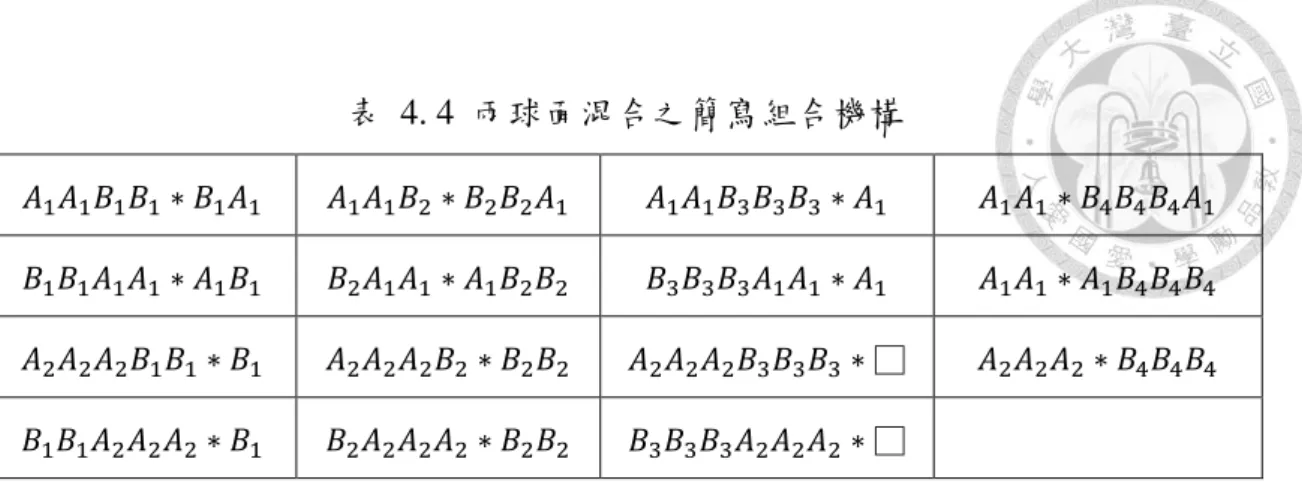
表 4. 3 兩球面之簡寫機構的接頭填法 ... 38
表 4. 4 兩球面混合之簡寫組合機構 ... 39
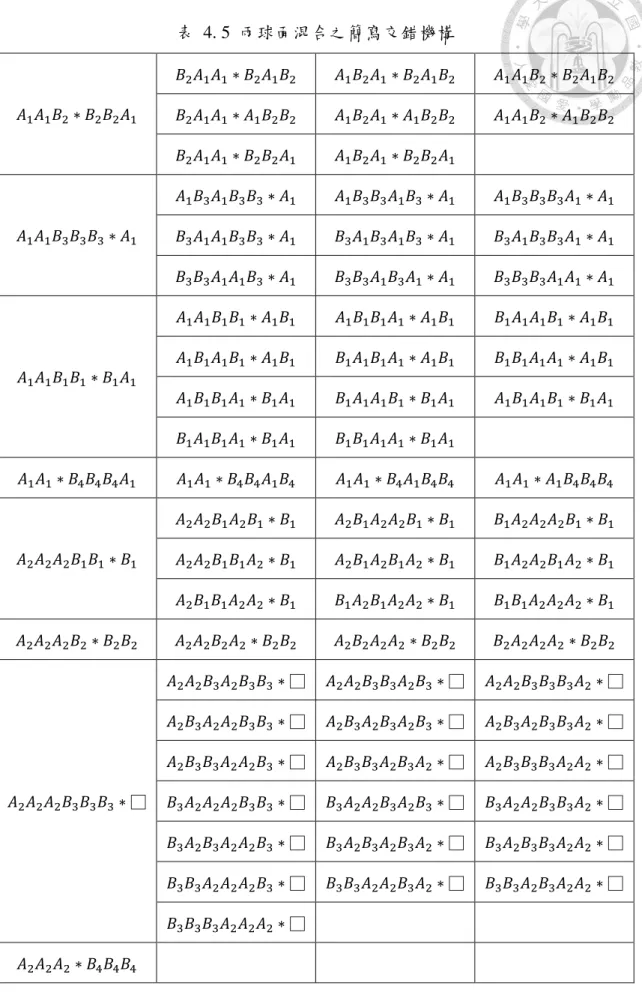
表 4. 5 兩球面混合之簡寫交錯機構 ... 40
表 4. 6 初步篩選後的兩球面混合之簡寫可能機構 ... 42
表 4. 7 第一種{1/𝐺(𝐲)}原生機構 ... 54
表 4. 8 第二種{1/𝐺(𝐲)}原生機構 ... 54
表 4. 9 以平移接頭數量分類{1/𝐺(𝐲)}原生機構 ... 55
表 4. 10 去除一平移接頭之{1/𝐺(𝐲𝟏)}及{1/𝐺(𝐲𝟐)}原生機構 ... 56
表 4. 11 去除一平移接頭之{1/𝐺(𝐲𝟏)}及{1/𝐺(𝐲𝟐)}簡寫原生機構 ... 56
表 4. 12 兩平面之簡寫機構的接頭填法 ... 56
表 4. 13 兩平面混合之簡寫組合機構 ... 57
表 4. 14 兩平面混合之簡寫交錯機構 ... 57
表 4. 15 初步篩選後的兩平面混合之簡寫可能機構 ... 60
表 4. 16 三軸旋轉混合之組合機構 ... 73
表 4. 17 三軸旋轉混合之交錯機構 ... 73
表 4. 18 三軸旋轉混和之機構類型分類 ... 75
第一章 緒論
1.1 前言
早期的機構學主要以圖解法來進行機構之運動分析,而適用圖解法的機構類 型有限,分析結果也比較不準確。然而隨著電腦科技及優化設計的快速發展,亦伴 隨著逐漸成熟的解析法及數值分析法於多領域之應用,使得分析機構的方法也愈 來愈廣泛與精確,而李群(Lie group)便是其中一種用於機構運動分析的方法。應用 李群於機構運動分析的優點在於不須將機構中的桿件尺寸、接頭變數等盡數涵蓋,
也不須進行繁複的數學運算,便可快速得知機構的運動狀態,且可藉由分解、結合 等方法,將已知機構進行修改,進而設計出新的機構。
於眾多機構中,不連續可動機構(Discontinuously Movable Mechanism, DMM)為 其中較特殊的一類。此種機構的運動狀態會受制於運動中之某些情況,造成其接頭 有不連續可動的現象,使得機構擁有無法同時進行作動的兩種運動模式。經過十餘 年的研究,此類機構已有完善的運動分析方法,但在定義、分類及合成方法等方面 還尚有欠缺。實務方面,不連續可動機構將可應用於並聯式機器人、並聯式空間機 構、等速聯軸機構、雙摺疊門樞等多種工業用途。故本文將對不連續可動機構進行 分類、分析,對已設計出之系統化合成方法進行驗證,並應用李群實際進行合成及 結果分析。
1.2 文獻回顧
始於 1970 時期,Hervé[1]將李群理論應用在分析機構的運動,主要使用矩陣 來表示及進行運算,並對各種運動進行剖析與歸類,進而提出基礎常見的運動子群。
接著藉由整理各個子群間的從屬關係,得到運動子群之結合、拆解及轉換等法則,
作為之後李群運算理論的奠基。而後幾年,Hervé[2-5]繼續對此理論進行探討,除 了基本的位置分析之外,也將理論帶入運動的分析方法,並提出更詳細的表示法及 運算方法。接著 Meng 等人[6]根據 Hervé 的理論做進一步的分析,提出更數學化的 運算和表示方式,在文中更舉出一些範例來做明確的說明。Lee 與 Hervé[7],利用 位移次群理論於空間純平移機器人的構造合成。
多位學者將李群應用在各式運動鏈(kinematic chain)及機構的分析和合成上。
Hervé 與 Lee [7]討論𝐺運動(gliding motion)的特性及運動產生器(generator),並將兩 個相異的𝐺運動鏈進行組合,去除重合運動的部分後得到𝐺 − 𝐺運動,分析其特性 並列舉𝐺 − 𝐺運動產生器,最後將其組成可用的並聯機構。文獻[8]中分析討論𝑌運 動(pseudoplanar motion)的運動鏈組成,先是用𝐻接頭(helical joint)來表示,而後應 用李群將其進行變化,並列舉出所有可形成𝑌運動的等效運動鏈,最後將其組合擴 充,得到多種可進行三維平移運動的三腳並聯機構。
此外,Hervé 及 Lee 等人在𝑋運動(Schoenflies motion)及𝑋 − 𝑋運動(double Schoenflies motion)有著深入的研究[9-12]。兩人進行𝑋運動的分析,列舉出所有的 𝑋運動產生器,也進行奇異構型的討論。同時,也討論此類運動的應用,組成 Oldham 聯軸器及 Delta Robot 等具潛在工業用途的機構。接著,更進一步在[13-17]中將兩 種𝑋運動串聯結合,同樣是應用李群進行分析,會有重合的運動出現,將此部分去 除後得到數種𝑋 − 𝑋運動產生器,並討論此運動在多種機構中的應用。
有關機構運動學之不連續可動性研究,Lee 與 Hervé 首先將位移李次群應用於 機構不連續可動性的分析與合成[18-23]。此類機構在運作時,依據不同的狀況,其
組成構件會有不同的運動模式(mode),有些構件還會出現暫時不可動的狀況,所以 被稱作「不連續可動」。由於此類機構的運動會隨著各種條件而改變,是一種較為 特殊的運動,因此較不容易推算得知。在文中,將先分析其機構組成,找尋出造成 運動改變的原因,如旋轉接頭同軸、轉軸平行等可能的條件,而後藉由鎖定某一條 件並應用李群的分析方式,來得知各條件下的運動狀態。
除了分析不連續可動機構的運動之外,在[22]中亦討論不連續可動機構的合成,
目標是合成出運動模式為兩種𝑋運動的不連續可動機構,其步驟為:
1. 分析運動
對兩種𝑋運動進行分析,得到二者有共同的運動──三維平移,將之消去 後,得知真正需要合成的部分為兩個方向不同的𝑅運動。
2. 尋找及組合機構
從文獻裡中找到運動模式為兩個相異𝑅運動的不連續可動機構,然後加上 共同的三維平移運動,得到符合需求的不連續可動機構。
3. 分析及列舉運動鏈
分析步驟 2 之機構的運動鏈,得知其為𝑋 − 𝑋運動產生器的一種,接著依 照其他文獻中的結果,列舉出所有可能的𝑋 − 𝑋運動產生器。
4. 列舉機構
從步驟 3 得到的運動鏈中進行挑選及組合,得到多種符合需求的機構。
近期 Lee 與 Hervé 更提出一具不連續可動性之等速聯軸器[23],探討其運動的 特性,也有對此聯軸器之個案例有更詳細的說明[24],最後提出其潛在工業應用。
羅子欽[25]於 2014 年整理出對於某一類不連續可動機構之合成方法,嘗試以電腦 模擬軟體進行運動分析,並列舉出幾個實例說明以證實其合成方法。
1.3 研究動機及目的
李群在機構分析上的應用雖然有一段時間,卻尚非十分普及。李群理論用於一 般機構及運動鏈的分析和合成上已有相當多的文獻探討,但對於不連續可動機構 之合成上的討論並不多。再者,不連續可動機構之定義為:擁有兩種或兩種以上不 可共存之運動的特殊機構。有許多學者對這類機構的產生原因進行研究,也做出了 各自的定義或命名,如顏鴻森教授[26]及 Balli 等人[27]定義且命名了「可變拓樸機 構 (Mechanism with variable topologies) 」, 而 Dai 等 人 [28] 則 提 出 「 變 胞 機 構 (Metamorphic mechanism)」,同樣是指機構在運作中會因某些條件導致拓樸構造改 變,使得構件運動產生改變,造成不連續可動的現象。Lee 與 Hervé 亦有對此說法 提出「變胞 Bennett 連桿機構(Metamorphic Bennett linkages)」進行研究[29]。另一 方面,Wohlhart[30]對於可變自由度的機構命名為「Kinematotropic linkages」,而後 由 Galletti 與 Fanghella[31]對此類機構進行研究。由此可知在這個領域裡,定義及 內容仍有探究的空間。因此,本文將依循文獻[25]對「不連續可動機構」進行探討 與分類,同時應用李群的理論發展出可以系統化合成此類具有兩種不可共存之運 動的特殊機構。接著對此方法的後續流程細節多做修改及說明,並予以更多的驗證,
最後嘗試使用該合成方法找出一具有三種運動之不連續可動機構。
1.4 論文架構
本文共分為五個章節,第一章為前述之緒論,簡單介紹李群在機構分析上之應 用與不連續可動機構的文獻回顧,以及本文研究之動機與目的等。
第二章為本文使用之理論的介紹,著重於李群在機構領域的應用方法、位移李 次群的種類,然後對機構分析與合成分別做詳細的介紹與討論。
第三章進入本文重點,先是對本文目標之「不連續可動機構」做詳細的介紹及 分類,並介紹李群對此類機構的運動分析及描述法,藉由分析多種不連續可動機構
來歸納其共同特徵。
第四章應用第三章之分析結果所得的特徵,設計出合成的方法,並實際進行操 作。列舉兩個合成雙運動不連續可動機構的例子,以及一個具三運動模式的機構,
進行結果展示,並討論不符合預期之案例及因素。
第五章作本文結論,總結前幾章之結果,並討論未來合成不連續可動機構之方 法的研究方向。
第二章 機構之分析理論與合成方法
2.1 李群及位移李次群
群是具有二元運算(binary operation,或稱群運算 group operation)的非空集合,
可含有限或無限個元素,滿足運算中的四種基本特性:封閉性(closure)、結合律 (associativity)、存在單位(identity element)元素以及反元素(inverse element),其數學 理論可應用於位移集合。如定義一集合𝐺,由元素{𝐴 , 𝐵 , 𝐶 , … }組成,元素間須滿足 下列運算,才能稱作一個群。
1. 封閉性:若𝐴 , 𝐵 ∈ 𝐺,則𝐴𝐵 ∈ 𝐺。
2. 結合律:若𝐴 , 𝐵 , 𝐶 ∈ 𝐺,則(𝐴𝐵)𝐶 = 𝐴(𝐵𝐶)。
3. 單位元素:存在一元素𝐼,使得任一元素𝐴 ∈ 𝐺,皆滿足𝐼𝐴 = 𝐴𝐼 = 𝐴。
4. 反元素:任一元素𝐴 ∈ 𝐺,集合𝐺必有另一元素𝐵 = 𝐴−1且𝐴𝐴−1= 𝐴−1𝐴 = 𝐼。
其中同時具有群運算結構的可微流形(manifold)則為李群,是以 19 世紀挪威自 阿貝爾之後極具代表性的數學家──Marius Sophus Lie 命名。利用指數映射來結合 李代數(Lie algebra)與李群,是李理論(Lie theory)對於連續群最具代表性的特徵。因 此,由此指數函數去轉換在實數向量空間中,以李代數結構表示之剛體運動的速度 場,即可得到位移李次群(displacement Lie subgroup),其對應關係如表 2.1。
已知位移運算𝐷是一在空間ℰ中對點𝑀的幾何轉換,包含向量的長度與角度。
因此,當此位移運算作用在任意剛體上時,可得此剛體新的位置。這樣的位移運算 𝐷可表示成:
∀𝑀 ∈ ℰ
𝑀→ 𝑀𝐷 ′= 𝑁 + 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 + exp((𝑓𝐮 + 𝑔𝐯 + ℎ𝐰) ∧) 𝐍𝐌 (2 − 1) 𝑀′ ∈ ℰ
其中𝑎 , 𝑏 , 𝑐 , 𝑓 , 𝑔 , ℎ為位移參數,點𝑁和𝐮 , 𝐯 , 𝐰向量建立空間結構。並利用單位向
量表示以便計算。令𝐓及𝐑為單位向量,且
𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 = 𝑡𝐓 𝐓 = (𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰)/∥ 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 ∥ 𝑓𝐮 + 𝑔𝐯 + ℎ𝐰 = 𝜃𝐑 𝐑 = (𝑓𝐮 + 𝑔𝐯 + ℎ𝐰)/∥ 𝑓𝐮 + 𝑔𝐯 + ℎ𝐰 ∥ 因此,2 − 1式亦可寫成:
𝐍𝐌′= 𝑡𝐓 + exp(𝜃𝐑 ∧) 𝐍𝐌 (2 − 2) 展開指數項的部分,可得:
exp(𝜃𝐑 ∧) = 1 + 1
1!𝜃𝐑 ∧ + 1
2!𝜃2𝐑 ∧ (𝐑 ∧) + ⋯ + 1
𝑛!𝜃𝑛(𝐑 ∧)𝑛+ ⋯ (2 − 3) 經過整理則寫成:
exp(𝜃𝐑 ∧) = 1 + sin 𝜃 𝐑 ∧ +(1 − cos 𝜃)(𝐑 ∧ (𝐑 ∧)) (2 − 4) 或寫成:
exp(𝜃𝐑 ∧)𝐍𝐌 = 𝐍𝐌 + sin 𝜃 𝐑 ∧ 𝐍𝐌 + (1 − cos 𝜃)(𝐑 ∧ (𝐑 ∧ 𝐍𝐌))
文獻[2]中指出,此指數項相當於一個以(𝑁, 𝐑)為軸的旋轉運動,此軸會過點𝑁,
且與向量𝐍𝐌夾角𝜃。同時,可以向量代數來證實:
exp(𝜃𝐑 ∧)𝐍𝐌 = (𝐑. 𝐍𝐌)𝐑 + sin 𝜃 𝐑 ∧ (𝐍𝐌 − (𝐑. 𝐍𝐌)𝐑) (2 − 5) + cos 𝜃 (𝐍𝐌 − (𝐑. 𝐍𝐌)𝐑)
其中(𝐑. 𝐍𝐌)𝐑表示一𝐍𝐌之正交投影於(𝑁, 𝐑)上;𝐍𝐌 − (𝐑. 𝐍𝐌)𝐑是𝐍𝐌之正交投影 於一垂直於該軸的面上;而𝐑 ∧ (𝐍𝐌 − (𝐑. 𝐍𝐌)𝐑) = 𝐑 ∧ 𝐍𝐌則為一落於同一平面 上、正交於前一方向的向量。
則任一給定位移皆可表示成一旋轉運動與一平移運動的組合,即式(2 − 2)。
此外,從對時間微分之計算後,可得點𝑀的速度,表示成:
𝐯(𝑀) =𝑑𝑎
𝑑𝜏𝐮 +𝑑𝑏
𝑑𝜏𝐯 +𝑑𝑐
𝑑𝜏𝐰 + (𝑑𝑓
𝑑𝜏𝐮 +𝑑𝑔
𝑑𝜏𝐯 +𝑑ℎ
𝑑𝜏𝐰) ∧ 𝐍𝐌 (2 − 6) 此速度場為一螺旋(screw)。
𝐯(𝑀) = 𝐯(𝑁) + 𝛀 ∧ 𝐍𝐌
表 2. 1 李代數結構對速度場之表示式 [4]
d.o.f Notation of the Lie subalgebra Given geometric elements 0 0
1 𝑎𝐮 Vector straight line 𝐷 = 𝑎𝐮
𝑓𝐮 ∧ (𝐍𝐌) Affine straight line or axis (𝑁, 𝐮) 𝑓(𝑘𝐮 + 𝐮 ∧ (𝐍𝐌)) Axis (𝑁, 𝐮) and pitch 𝑝 = 2𝜋𝑘
2 𝑎𝐮 + 𝑏𝐯 Vector plane 𝑃 = 𝑎𝐮 + 𝑏𝐯
𝑎𝐮 + 𝑓𝐮 ∧ (𝐍𝐌) Affine straight line or axis (𝑁, 𝐮) 3 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰
𝑎𝐮 + 𝑏𝐯 + ℎ𝐰 ∧ (𝐍𝐌) Vector plane 𝑃 = 𝑎𝐮 + 𝑏𝐯 or vector 𝐰 (𝐰 ⊥ 𝑃) 𝑎𝐮 + 𝑏𝐯 + ℎ(𝑘𝐰 + 𝐰 ∧ (𝐍𝐌)) Vector 𝐰 and pitch 𝑝 = 2𝜋𝑘
(𝑓𝐮 + 𝑔𝐯 + ℎ𝐰) ∧ (𝐍𝐌) Point 𝑁 4 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 + ℎ𝐰 ∧ (𝐍𝐌) Vector 𝐰 6 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 + (𝑓𝐮 + 𝑔𝐯 +
ℎ𝐰) ∧ (𝐍𝐌)
d.o.f Displacement subgroup Transformations
Variables of translation, rotation
0 {𝐸} 𝑀 → 𝑀
1 {𝑇(𝐮)} 𝑀 → 𝑀 + 𝑎𝐮 𝑎
{𝑅(𝑁, 𝐮)} 𝑀 → 𝑁 + exp (𝑓𝐮 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 𝑓
{𝐻(𝑁, 𝐮, 𝑝)} 𝑀 → 𝑁 + 𝑓𝑘𝐮 + exp (𝑓𝐮 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 𝑓
2 {𝑇(𝑃𝑙)} 𝑀 → 𝑀 + 𝑎𝐮 + 𝑏𝐯 𝑎, 𝑏
{𝐶(𝑁, 𝐮)} 𝑀 → 𝑁 + 𝑎𝐮 + exp (𝑓𝐮 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 𝑓
3 {𝑇} 𝑀 → 𝑀 + 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 𝑎, 𝑏, 𝑐
{𝐺(𝑃𝑙)} or {𝐺(𝐰)} 𝑀 → 𝑁 + 𝑎𝐮 + 𝑏𝐯 + exp (ℎ𝐰 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 ℎ {𝑌(𝐰, 𝑝)} 𝑀 → 𝑁 + 𝑎𝐮 + 𝑏𝐯 + ℎ𝑘𝐰 + exp (ℎ𝐰 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 ℎ {𝑆(𝑁)} 𝑀 → 𝑁 + exp ((𝑓𝐮 + 𝑔𝐯 + ℎ𝐰) ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 𝑓, 𝑔, ℎ 4 {𝑋(𝐰)} 𝑀 → 𝑁 + 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 + exp (ℎ𝐰 ∧)(𝐍𝐌) 𝑎, 𝑏, 𝑐 ℎ
6 {𝐷} 𝑀 → 𝑁 + 𝑎𝐮 + 𝑏𝐯 + 𝑐𝐰 + exp ((𝑓𝐮 + 𝑔𝐯 +
ℎ𝐰) ∧)(𝐍𝐌)
𝑎, 𝑏, 𝑐 𝑓, 𝑔, ℎ
表 2.1 中分別列出對十二種位移李次群之自由度、於李代數的表示式與給定 的幾何元素,以及其轉換式與旋轉或平移的變數。觀察自由度對應於變數之數 量,例如:運動{𝐺(𝑃𝑙)}之自由度為 3,且該運動具有三個變數,表示此運動所需 之驅動數量為 3。另外,從三變數𝑎、𝑏、ℎ中可判斷此運動之概況,變數𝑎、𝑏所 影響的是兩種方向的平移,變數ℎ則是異於前兩種方向之旋轉參數。
因此,表 2.1 列出空間中一般的運動模式,可轉換成常見的基本運動對表示法,
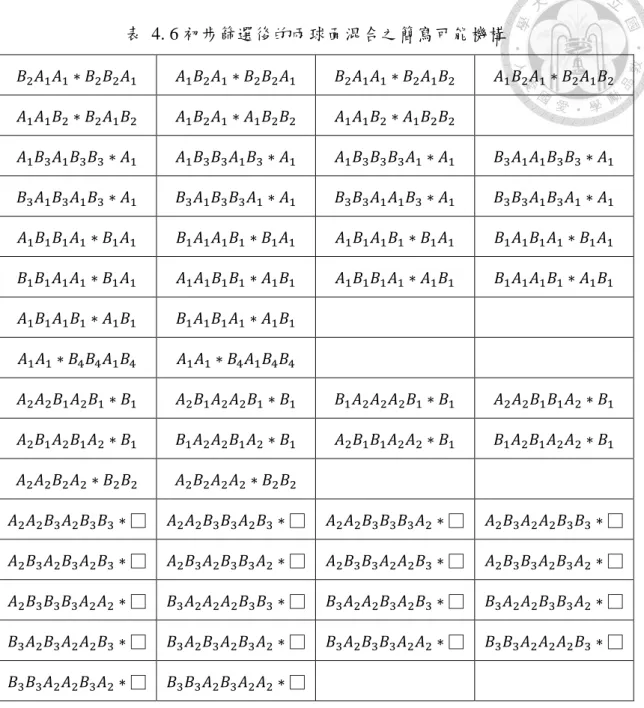
例如平移運動、旋轉運動、螺旋運動、圓柱運動、平面運動與球面運動等。若是應 用在機構分析上,則能清楚地判斷相鄰連接桿件的相對運動狀態。而表 2.2 則為由 Hervé 進一步對於各個位移李次群情形之描述。
表 2. 2 位移李次群之運動描述 [5]
運動表示法 運動描述 {𝐸} 不動(為單位元)
{𝑇(𝐮)} 平行於𝐮方向之平移運動 {𝑅(𝑁, 𝐮)} 以(𝑁, 𝐮)為軸之旋轉運動
{𝐻(𝑁, 𝐮, 𝑝)} 以(𝑁, 𝐮)為軸、節距為𝑝之螺旋運動 {𝑇(𝑃𝑙)} 平行於平面𝑃𝑙之二維平移運動
{𝐶(𝑁, 𝐮)} 以(𝑁, 𝐮)為軸之圓柱運動(旋轉運動附帶平移運動)
{𝑇} 空間三維平移運動
{𝐺(𝑃𝑙)} or {𝐺(𝐰)}
平行於平面𝑃𝑙之滑移運動,可以𝐰方向旋轉
{𝑌(𝐰, 𝑝)} 垂直於𝐰方向的二維平移及以𝐰方向為軸、節距為𝑝之螺旋運動 {𝑆(𝑁)} 以𝑁為球心之三維球面運動
{𝑋(𝐰)} 空間三維平移及以𝐰方向為軸的旋轉運動,又稱 Schönflies 運動
{𝐷} 空間三維平移及三維旋轉,普遍的剛體運動
將表 2.2 中的運動參數進行整理,可找出群與次群間互相從屬的關係,藉著 自由度的遞減,並以階層關係來呈現,可得圖 2.1。
圖 2. 1 位移李次群階層關係圖[7]
自由度是機構中需要控制的參數數量,例如在圖 2.1 中,{𝑌(𝐰, 𝑝)}是 3 自由度 的運動,需要控制的 3 個參數為,兩個方向的平移和一個方向的螺旋運動。若是從 中去除其螺旋運動,則可減少成 2 自由度的{𝑇(𝑃𝑙)}運動。在 12 種李次群中,有 5 種運動可用單一接頭就可以達成,如表 2.3 所示。
表 2. 3 常用接頭與李次群之對應
種類 表示法 運動表示
平移接頭 𝑇𝐮 {𝑇(𝐮)}
旋轉接頭 𝑅𝐮𝑁 {𝑅(𝑁, 𝐮)}
螺旋接頭 𝐻𝐮,𝑝𝑁 {𝐻(𝑁, 𝐮, 𝑝)}
圓柱接頭 𝐶𝐮𝑁 {𝐶(𝑁, 𝐮)}
球接頭 𝑆𝑁 {𝑆(𝑁)}
{𝐻(𝑁, 𝐮, 𝑝)}
DOF
{𝐷}
{𝑋(𝐰)}
{𝑆(𝑁)}
{𝐶(𝑁, 𝐮)}
{𝐸}
{𝑌(𝐰, 𝑝)}
{𝐺(𝑃𝑙)} {𝑇}
{𝑇(𝑃𝑙)}
{𝑅(𝑁, 𝐮)} {𝑇(𝐮)}
4 6
2 3
1
0
2.2 機構運動分析方法
本節將介紹開放式運動鏈以及封閉式機構的運動分析。進行分析前,須先指定 機構中的地桿(ground),及所要分析相對於地桿之運動的桿件:端效器(end-effector),
其次定義出從地桿至端效器的路徑,每一路徑皆可視為一條運動鏈。對於開放式運 動鏈,單條運動鏈的末端即為端效器的位置。封閉式機構分析則是找出每一條運動 鏈所產生之運動的交集運動,記作{𝐿(𝑛, 𝑚)},其中𝑛為地桿的桿件編號,𝑚為端效 器的桿件編號,𝑚相對於𝑛之運動即為要分析的運動。
舉例來說,從圖 2.1 中可以發現階層中沒有單一的位移次群可表達 5 自由度之 運動,但可由其他運動鏈組合才能達成,在此以雙平面運動之串聯為例,構成三個 方向的平移及兩個方向的旋轉運動。將 3 自由度的{𝐺(𝐰)}可拆解成三個由旋轉接 頭𝑅及平移接頭𝑇之 1 自由度李次群的串接,假設給予三條相異的線(𝑁1, 𝐰)、(𝑁2, 𝐰)、
(𝑁3, 𝐰),可得:
{𝐺(𝐰)} = {𝑅(𝑁1, 𝐰)}{𝑅(𝑁2, 𝐰)}{𝑅(𝑁3, 𝐰)}
{𝐺(𝐰)}
= {𝑅(𝑁1, 𝐰)}{𝑅(𝑁2, 𝐰)}{𝑇(𝐮)}{𝐺(𝐰)}
= {𝑅(𝑁1, 𝐰)}{𝑇(𝐮)}{𝑅(𝑁2, 𝐰)}{𝐺(𝐰)}
= {𝑇(𝐮)}{𝑅(𝑁1, 𝐰)}{𝑅(𝑁2, 𝐰)}{𝐺(𝐰)}
= {𝑅(𝑁1, 𝐰)}{𝑇(𝐮)}{𝑇(𝐯)}{𝐺(𝐰)}
= {𝑇(𝐮)}{𝑅(𝑁1, 𝐰)}{𝑇(𝐯)}{𝐺(𝐰)}
= {𝑇(𝐮)}{𝑇(𝐯)}{𝑅(𝑁1, 𝐰)}其中𝐮 ≠ 𝐯 , ∀𝐮 ⊥ 𝐰 , ∀𝐯 ⊥ 𝐰。上列各恆等式中,並非表示任意的旋轉運動可與平移 運動互相調換,而是以可造成運動{𝐺(𝐰)}為出發點,列出所有可能的運動鏈組合。
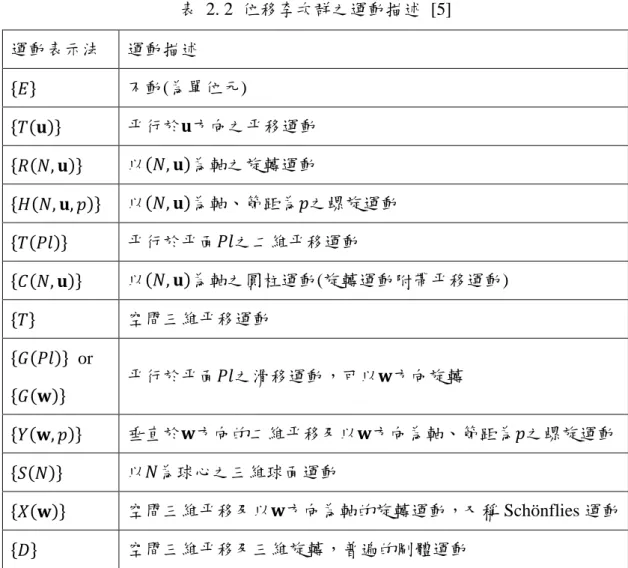
若以接頭𝑅及𝑃表示能更直接地連結到運動鏈的型式,如圖 2.2 所示,若不考 慮運動鏈路徑的順序,三種組合與其交錯排列之組合皆可完成平面運動,即𝑅𝑅𝑅、
𝑅𝑅𝑃、𝑅𝑃𝑃。
圖 2. 2 產生平面運動{𝐺(𝐰)}之等效運動鏈 [7]
接著,在串聯兩個平面運動{𝐺(𝐮)}及{𝐺(𝐯)}前,須先了解只要𝐮 ≠ 𝐯,此兩平面 運動間必有一非空集合之交集,即{𝐺(𝐮)} ∩ {𝐺(𝐯)} = {𝑇(𝐰)},得到𝐰會同時垂直於 𝐮 和 𝐯 , 可 由 向 量 積 𝐮 × 𝐯/|𝐮 × 𝐯| 得 到 。 兩 運 動 之 串 聯 以 乘 積 表 示 成 {𝐿} = {𝐺(𝐮)}{𝐺(𝐯)},由於{𝐺(𝐮)}及{𝐺(𝐯)}皆包含{𝑇(𝐰)},{𝐺(𝐮)}{𝐺(𝐯)}將會有兩個{𝑇(𝐰)},
但因為乘積封閉性的關係,{𝑇(𝐰)}2 = {𝑇(𝐰)},多餘的一個{𝑇(𝐰)}可直接在運算式 中 消 去 。 圖 2.3 則 為 其 中 一 種 雙 平 面 運 動 鏈 之 可 能 , 選 擇 {𝐺(𝐮)} = {𝑅(𝐴, 𝐮)}{𝑅(𝐵, 𝐮)}{𝑅(𝐶, 𝐮)}及{𝐺(𝐯)} = {𝑇(𝐰)}{𝑅(𝐷, 𝐯)}{𝑅(𝐸, 𝐯)},因此在串聯之後,
多餘的{𝑇(𝐰)}不會對 5 自由度之運動鏈有額外的運動狀態,將從運動鏈式中去除,
構成{𝐺(𝐮)}{𝐺(𝐯)} = {𝑅(𝐴, 𝐮)}{𝑅(𝐵, 𝐮)}{𝑅(𝐶, 𝐮)}{𝑅(𝐷, 𝐯)}{𝑅(𝐸, 𝐯)},在空間中構成 一3𝑇 − 2𝑅之機構。
圖 2. 3 雙平面運動鏈 [7]
然而,3𝑇 − 2𝑅的運動鏈不只能從{𝐺(𝐮)}{𝐺(𝐯)}中獲得,{𝑋(𝐮)}{𝑋(𝐯)}也能推得 擁有三個方向的平移及兩個方向的旋轉 5 自由度運動。不同於{𝐺(𝐮)}{𝐺(𝐯)}的是,
{𝑋(𝐮)} ∩ {𝑋(𝐯)} = {𝑇} , 因 此 可 分 別 將 {𝑋(𝐮)} 及 {𝑋(𝐯)} 視 為 {𝑅(𝐴, 𝐮)}{𝑇} 與 {𝑇}{𝑅(𝐵, 𝐯)} , 則 {𝐿} = {𝑋(𝐮)}{𝑋(𝐯)} = {𝑇}{𝑅(𝐴, 𝐮)}{𝑅(𝐵, 𝐯)} , 如 圖 2.4 所 示 之 𝑃𝑃𝑃𝐻 − 𝐻,其中𝑃𝑃𝑃𝐻原屬於{𝑋(𝐮)},最右邊的𝐻則是從{𝑋(𝐯)}去除三個重複方向 的平移自由度而剩下之接頭。
圖 2. 4 {𝑋(𝐮)}{𝑋(𝐯)}運動鏈 [14]
其次,對於封閉機構而言,端效器的位置不再一定位於運動鏈的末端,因此欲 求的運動方法則會是各個運動鏈的交集。例如給予一個單迴路機構(single loop mechanism):𝑅𝐮𝐴𝑇𝐯𝑅𝐮𝐵𝑅𝐮𝑁𝑅𝐯𝑁𝑅𝐰𝑁,地桿介於𝑅𝐱𝐴及𝑅𝐰𝑁之間,端效器介於𝑅𝐮𝐵及𝑅𝐮𝑁之間,
則自地桿至端效器間產生兩條路徑,即𝑅𝐮𝐴𝑇𝐯𝑅𝐮𝐵和𝑅𝐮𝑁𝑅𝐯𝑁𝑅𝐰𝑁的運動鏈,故兩運動鏈產 生的運動為:
{𝐺1} = {𝑅(𝐴, 𝐮)}{𝑇(𝐯)}{𝑅(𝐵, 𝐮)}
{𝐺2} = {𝑅(𝑁, 𝐮)}{𝑅(𝑁, 𝐯)}{𝑅(𝑁, 𝐰)}
將以上兩運動進行交集分析,運算程序如下:
{𝐿} = {𝐺1} ∩ {𝐺2}
{𝐿}
= {𝑅(𝐴, 𝐮)}{𝑇(𝐯)}{𝑅(𝐵, 𝐮)} ∩ {𝑅(𝑁, 𝐮)}{𝑅(𝑁, 𝐯)}{𝑅(𝑁, 𝐰)}{𝐿}
= {𝐺(𝐮)} ∩ {𝑆(𝑁)}{𝐿}
= {𝑅(𝑁, 𝐮)}得知此機構的兩條運動鏈分別產生兩個不同方向的三自由度平面運動,端效器的 運動為以(𝑁, 𝐮)為軸線之旋轉運動。
接著是歐丹聯軸器(Oldham coupling)的分析,由 2 個𝑅接頭和 2 個𝑃接頭組成 的 4 連桿機構,如圖 2.5 所示。
圖 2. 5 歐丹聯軸器 [10]
聯軸器的主要研究就是其輸出端的運動,以桿 1 為地桿、桿 4 為端效器,則地 桿與端效器間的兩條運動鏈分別為𝑅𝐤𝐴𝑇𝐢𝑇𝐣及𝑅𝐤𝐵,其中𝐢及𝐣的方向構成一個垂直於𝐤 的二維平移運動,因此兩條運動鏈的運動可分別寫為:
{𝐺1} = {𝑅(𝐴, 𝐤)}{𝑇(𝐢)}{𝑇(𝐣)}
{𝐺2} = {𝑅(𝐵, 𝐤)}
以上兩運動之交集即是端效器相對於地桿的運動,記作{𝐿(1 , 4)}。
{𝐿(1, 4)} = {𝐺1} ∩ {𝐺2}
{𝐿(1 , 4)}
= {𝑅(𝐴, 𝐤)}{𝑇(𝐢)}{𝑇(𝐣)} ∩ {𝑅(𝐵, 𝐤)}{𝐿(1 , 4)}
= {𝑅(𝐴, 𝐤)}{𝑇(𝑃𝑙𝐤)} ∩ {𝑅(𝐵, 𝐤)}{𝐿(1 , 4)}
= {𝐺(𝐤)} ∩ {𝑅(𝐵, 𝐤)}{𝐿(1 , 4)}
= {𝑅(𝐵, 𝐤)}經上述分析的結果為以 k 方向為軸的旋轉運動,證實可為聯軸器。
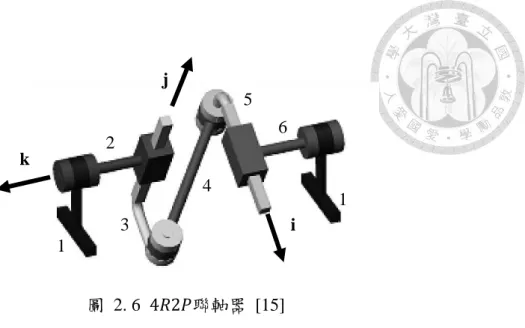
從前一聯軸器中,將其虛線框內的構件擴充成另一較複雜之聯軸器,由 4 個𝑅 接頭及 2 個𝑃接頭組成的 6 連桿機構,如圖 2.6 所示。
圖 2. 6 4𝑅2𝑃聯軸器 [15]
設以桿 1 為地桿、桿 6 為端效器,則自地桿至端線器間產生之路徑分別為 𝑅𝐤𝐴𝑇𝐣𝑅𝐣𝐵𝑅𝐣𝐶𝑇𝐢及𝑅𝐤𝐷的運動鏈,其中𝐢及𝐣皆為垂直於 k 的方向,此兩條運動鏈的運動 可寫為:
{𝐺1} = {𝑅(𝐴, 𝐤)}{𝑇(𝐣)}{𝑅(𝐵, 𝐣)}{𝑅(𝐶, 𝐣)}{𝑇(𝐢)}
{𝐺2} = {𝑅(𝐷, 𝒌)}
以上兩運動之交集即為端效器相對於地桿的運動,記作 {𝐿(1, 6)}。
{𝐿(1, 6)} = {𝐺1} ∩ {𝐺2}
{𝐿(1 , 6)}
= {𝑅(𝐴, 𝐤)}{𝑇(𝐣)}{𝑅(𝐵, 𝐣)}{𝑅(𝐶, 𝐣)}{𝑇(𝐢)} ∩ {𝑅(𝐷, 𝐤)}{𝐿(1 , 6)}
= {𝑅(𝐴, 𝐤)}{𝑇(𝐣)}{𝐺(𝐣)} ∩ {𝑅(𝐷, 𝐤)}{𝐿(1 , 6)}
= {𝑅(𝐴, 𝐤)}{𝑋(𝐣)} ∩ {𝑅(𝐷, 𝐤)}{𝐿(1 , 6)}
= {𝑋(𝐤)}{𝑋(𝐣)} ∩ {𝑅(𝐷, 𝐤)}{𝐿(1 , 6)}
= {𝑅(𝐷, 𝒌)}利用李群理論及位移李次群的運動表示法,可得輸出端的運動為以 k 方向為軸的 旋轉運動,證實有達到聯軸器的功能。
i j
k
1
1 2
3
4 5
6
不僅是單迴路機構,李群亦可用於分析由多隻腳組成的並聯機構(parallel mechanism),即多迴路機構(multiple loop mechanism)。只要將多隻腳的並聯機構視 為多個閉迴路運動鏈來分析,在此舉一個機構為例,如圖 2.7 所示,最上端的桿件 為端效器的位置,每隻腳最下端的桿件為地桿,故此機構含有 5 隻由 5 自由度運 動鏈組成的腳。
圖 2. 7 五腳並聯機構 [13]
從 腳 A 到 腳 E 的 運 動 分 別 為 : {𝑋(𝐮)}{𝑅(𝑀1, 𝐯)} , {𝑅(𝑁1, 𝐯)}{𝑋(𝐮)} , {𝑋(𝐯)}{𝑅(𝑀2, 𝐮)},{𝑅(𝑁2, 𝐮)}{𝑋(𝐯)},{𝑋(𝐯)}{𝑅(𝑀3, 𝐮)},端效器的運動應為以上這 五種運動的交集運動。在此先將令腳 A 和腳 B 組成運動鏈{𝐿1}、腳 C 和腳 D 組成 {𝐿2},接著進行{𝐿1}及{𝐿2}之交集運算,腳 E 則放到最後做結合運算,可先得到兩 條運算式:
{𝐿1} = {𝑋(𝐮)}{𝑅(𝑀1, 𝐯)} ∩ {𝑅(𝑁1, 𝐯)}{𝑋(𝐮)}
{𝐿
1}
= {𝑋(𝐮)}{𝑋(𝐯)} ∩ {𝑋(𝐯)}{𝑋(𝐮)}{𝐿
1}
= {𝑋(𝐮)}{𝑋(𝐯)}地桿
端效器
{𝐿2} = {𝑋(𝐯)}{𝑅(𝑀2, 𝐮)} ∩ {𝑅(𝑁2, 𝐮)}{𝑋(𝐯)}
{𝐿
2}
= {𝑋(𝐯)}{𝑋(𝐮)} ∩ {𝑋(𝐮)}{𝑋(𝐯)}{𝐿
2}
= {𝑋(𝐮)}{𝑋(𝐯)}將以上兩分析結果再進行一次交集運算,並將此結果與腳 E 的運動作交集,可得 以下兩條運算式:
{𝐿3} = {𝐿1} ∩ {𝐿2}
{𝐿
3}
= {𝑋(𝐮)}{𝑋(𝐯)} ∩ {𝑋(𝐮)}{𝑋(𝐯)}{𝐿
3}
= {𝑋(𝐮)}{𝑋(𝐯)}{𝐿} = {𝐿3} ∩ {𝑋(𝐯)}{𝑅(𝑀3, 𝐮)}
{𝐿}
= {𝑋(𝐮)}{𝑋(𝐯)} ∩ {𝑋(𝐯)}{𝑋(𝐮)}{𝐿}
= {𝑋(𝐮)}{𝑋(𝐯)}{𝐿}為交集運算的最終結果,故得知圖 2.7 中並聯機構的端效器運動為以𝐮及𝐯兩方 向為旋轉軸的雙𝑋運動。
2.3 新機構產生方法
「新機構」的產生是指設計出與某一已知機構具相同運動的機構,但有著不同 的接頭種類或排列。意味著此兩機構的所有桿件的運動不須完全相同,而是各機構 之端效器相對於地桿的運動相同。其中一種合成的方法為:利用等效的運動鏈來取 代原運動鏈。因此,需要先尋找欲研究之運動的等效運動鏈。此部分的研究主要出 現在較早期的論文當中,例如𝐻𝐰,𝑝𝐴 𝐻𝐰,𝑝𝐵 𝐻𝐰,𝑝𝐶 運動鏈,此運動鏈產生的運動{𝐿}為:
{𝐿} = {𝐻(𝐴, 𝐰, 𝑝)}{𝐻(𝐵, 𝐰, 𝑝)}{𝐻(𝐶, 𝐰, 𝑝)} = {𝑌(𝐰, 𝑝)}
可得知產生的運動為包含兩方向平移及一方向螺旋運動的 3 自由度虛平面運動 (Pseudoplanar motion)。藉李群理論可以列舉出其他可產生相同運動的運動組合[6]。
{𝑌(𝐰, 𝑝)} = {𝐻(𝐴, 𝐰, 𝑝)}{𝐻(𝐵, 𝐰, 𝑝)}{𝐻(𝐶, 𝐰, 𝑝)}
{𝑌(𝐰, 𝑝)}
= {𝐻(𝐴, 𝐰, 𝑝)}{𝐻(𝐵, 𝐰, 𝑝)}{𝑇(𝐮)}{𝑌(𝐰, 𝑝)}
= {𝐻(𝐴, 𝐰, 𝑝)}{𝑇(𝐮)}{𝐻(𝐵, 𝐰, 𝑝)}{𝑌(𝐰, 𝑝)}
= {𝑇(𝐮)}{𝐻(𝐴, 𝐰, 𝑝)}{𝐻(𝐵, 𝐰, 𝑝)}{𝑌(𝐰, 𝑝)}
= {𝐻(𝐴, 𝐰, 𝑝)}{𝑇(𝐮)}{𝑇(𝐯)}{𝑌(𝐰, 𝑝)}
= {𝑇(𝐮)}{𝐻(𝐴, 𝐰, 𝑝)}{𝑇(𝐯)}{𝑌(𝐰, 𝑝)}
= {𝑇(𝐮)}{𝑇(𝐯)}{𝐻(𝐴, 𝐰, 𝑝)}將 以 上 列 舉 出 來 的 運 動 表 示 成 運 動 鏈 , 共 可 得 7 種 產 生 {𝑌(𝐰, 𝑝)} 的 運 動 鏈
──𝐻𝐰,𝑝𝐴 𝐻𝐰,𝑝𝐵 𝐻𝐰,𝑝𝐶 、𝐻𝐰,𝑝𝐴 𝐻𝐰,𝑝𝐵 𝑇𝐮、𝐻𝐰,𝑝𝐴 𝑇𝐮𝐻𝐰,𝑝𝐵 、𝑇𝐮𝐻𝐰,𝑝𝐴 𝐻𝐰,𝑝𝐵 、𝐻𝐰,𝑝𝐴 𝑇𝐮𝑇𝐯、𝑇𝐮𝐻𝐰,𝑝𝐴 𝑇𝐯、𝑇𝐮𝑇𝐯𝐻𝐰,𝑝𝐴 。 因此當某一運動鏈中有出現這 7 種接頭組合之一時,即可用其他 6 種替換來產生 有著相同運動的新運動鏈,藉此產生新機構。
另外,李群理論方法也適用於更複雜的運動分析。如𝐻𝐮𝐴𝐻𝐮𝐵𝐻𝐮𝐶𝐻𝐮𝐷運動鏈,由 4 個相同方向但不同軸線的螺旋接頭組成,自由度為 4,在空間中構成一具有三維平 移及以𝐮方向為軸的旋轉運動。由於多個𝐻接頭連續串接而成的運動較難判斷,文 獻[9]中提供的分析方法為「螺旋理論(screw theory)」,計算得知該運動鏈產生{𝑋(𝐮)},
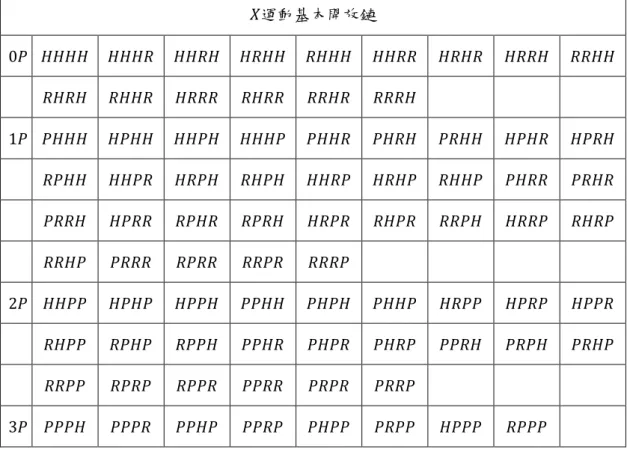
並進一步列舉出擁有相同運動的運動鏈,如表 2.4 所示。
表 2. 4 𝑋運動基本開放鏈 [9]
𝑋運動基本開放鏈
0𝑃 𝐻𝐻𝐻𝐻 𝐻𝐻𝐻𝑅 𝐻𝐻𝑅𝐻 𝐻𝐻𝑅𝑅 𝐻𝑅𝐻𝑅 𝐻𝑅𝑅𝐻 𝑅𝐻𝐻𝑅 𝐻𝑅𝑅𝑅 𝑅𝐻𝑅𝑅 1𝑃 𝑃𝐻𝐻𝐻 𝑃𝐻𝐻𝑅 𝑃𝐻𝑅𝐻 𝑃𝑅𝐻𝐻 𝑃𝐻𝑅𝑅 𝑃𝑅𝐻𝑅 𝑃𝑅𝑅𝐻 𝑃𝑅𝑅𝑅 𝐻𝐻𝑃𝐻
𝐻𝐻𝑃𝑅 𝐻𝑅𝑃𝐻 𝑅𝐻𝑃𝐻 𝐻𝑅𝑃𝑅 𝑅𝐻𝑃𝑅 𝑅𝑅𝑃𝐻 𝑅𝑅𝑃𝑅
2𝑃 𝐻𝐻𝑃𝑃 𝐻𝑅𝑃𝑃 𝑅𝐻𝑃𝑃 𝑅𝑅𝑃𝑃 𝐻𝑃𝑃𝐻 𝐻𝑃𝑃𝑅 𝑅𝑃𝑃𝑅 𝐻𝑃𝐻𝑃 𝐻𝑃𝑅𝑃 𝑅𝑃𝐻𝑃 𝑅𝑃𝑅𝑃 𝑃𝐻𝐻𝑃 𝑃𝐻𝑅𝑃 𝑃𝑅𝑅𝑃
3𝑃 𝑃𝑃𝑃𝐻 𝑃𝑃𝑃𝑅 𝑃𝑃𝐻𝑃 𝑃𝑃𝑅𝑃
表 2.4 中顯示出 43 種可以產生𝑋運動的運動鏈。但在進行機構組裝和分析的 時,須按照接頭順序來進行,將接頭順序反向排列之運動鏈視為不同的運動鏈是必 要的。因此,考慮反向排列的運動鏈可得表 2.5,共 79 種可產生𝑋運動的運動鏈。
若遇到某一運動鏈含有𝑋運動時,便有 79 種選擇,增加了機構可選擇的種類。
表 2. 5 含反向排列之𝑋運動基本開放鏈 𝑋運動基本開放鏈
0𝑃 𝐻𝐻𝐻𝐻 𝐻𝐻𝐻𝑅 𝐻𝐻𝑅𝐻 𝐻𝑅𝐻𝐻 𝑅𝐻𝐻𝐻 𝐻𝐻𝑅𝑅 𝐻𝑅𝐻𝑅 𝐻𝑅𝑅𝐻 𝑅𝑅𝐻𝐻 𝑅𝐻𝑅𝐻 𝑅𝐻𝐻𝑅 𝐻𝑅𝑅𝑅 𝑅𝐻𝑅𝑅 𝑅𝑅𝐻𝑅 𝑅𝑅𝑅𝐻
1𝑃 𝑃𝐻𝐻𝐻 𝐻𝑃𝐻𝐻 𝐻𝐻𝑃𝐻 𝐻𝐻𝐻𝑃 𝑃𝐻𝐻𝑅 𝑃𝐻𝑅𝐻 𝑃𝑅𝐻𝐻 𝐻𝑃𝐻𝑅 𝐻𝑃𝑅𝐻 𝑅𝑃𝐻𝐻 𝐻𝐻𝑃𝑅 𝐻𝑅𝑃𝐻 𝑅𝐻𝑃𝐻 𝐻𝐻𝑅𝑃 𝐻𝑅𝐻𝑃 𝑅𝐻𝐻𝑃 𝑃𝐻𝑅𝑅 𝑃𝑅𝐻𝑅 𝑃𝑅𝑅𝐻 𝐻𝑃𝑅𝑅 𝑅𝑃𝐻𝑅 𝑅𝑃𝑅𝐻 𝐻𝑅𝑃𝑅 𝑅𝐻𝑃𝑅 𝑅𝑅𝑃𝐻 𝐻𝑅𝑅𝑃 𝑅𝐻𝑅𝑃 𝑅𝑅𝐻𝑃 𝑃𝑅𝑅𝑅 𝑅𝑃𝑅𝑅 𝑅𝑅𝑃𝑅 𝑅𝑅𝑅𝑃
2𝑃 𝐻𝐻𝑃𝑃 𝐻𝑃𝐻𝑃 𝐻𝑃𝑃𝐻 𝑃𝑃𝐻𝐻 𝑃𝐻𝑃𝐻 𝑃𝐻𝐻𝑃 𝐻𝑅𝑃𝑃 𝐻𝑃𝑅𝑃 𝐻𝑃𝑃𝑅 𝑅𝐻𝑃𝑃 𝑅𝑃𝐻𝑃 𝑅𝑃𝑃𝐻 𝑃𝑃𝐻𝑅 𝑃𝐻𝑃𝑅 𝑃𝐻𝑅𝑃 𝑃𝑃𝑅𝐻 𝑃𝑅𝑃𝐻 𝑃𝑅𝐻𝑃 𝑅𝑅𝑃𝑃 𝑅𝑃𝑅𝑃 𝑅𝑃𝑃𝑅 𝑃𝑃𝑅𝑅 𝑃𝑅𝑃𝑅 𝑃𝑅𝑅𝑃
3𝑃 𝑃𝑃𝑃𝐻 𝑃𝑃𝑃𝑅 𝑃𝑃𝐻𝑃 𝑃𝑃𝑅𝑃 𝑃𝐻𝑃𝑃 𝑃𝑅𝑃𝑃 𝐻𝑃𝑃𝑃 𝑅𝑃𝑃𝑃
第三章 不連續可動機構
3.1 不連續可動機構
對於連續可動機構而言,兩桿件間相對運動之位移子集是一完全定義的維度。
反觀不連續可動機構中兩特定桿件間之位移子集,則為兩個或以上各有其維度的 相異平滑流形之聯集。
因此,不連續可動機構具兩種或以上無法共同進行的運動模式,且含一個以上 之「分歧點(singular pose)」。分歧點的位置可視為該機構瞬時之易變(uncertainty),
或其模式變換之過渡位置,且此結構狀態存在部分可動性,該可動性為以螺旋構成 之向量空間維度。簡言之,此時機構同時滿足全數所含運動模式的條件,可進入任 一運動模式。
當此類機構通過這些分歧點進入其中一個運動模式時,會阻止其他運動模式 作動,此時機構之整體自由度即於該運動模式之自由度。運動時,僅部分接頭會運 作,其餘的接頭會保持不動,運作中的接頭可以組成該運動模式之機構。若要切換 至另一運動模式,須先將此機構回復到分歧點位置,才能選擇其他的運動模式來運 作。而進入另一種運動模式後,參與運動的接頭將會與先前的不同。
這些具特殊運動的機構已有許多研究。對於各種不連續可動機構進行運動模 式的分析,多為由 Lee 與 Hervé 所作之研究[18-21]。文獻[18]中提出對於多種單迴 路6𝑅機構之分析,含著名之 Sarrus 機構。文獻[19]中列舉出具{1/𝐺(𝐮)}及{1/𝑆(𝑂)}
兩種運動模式之「混合型球面及球面7𝑅不連續可動機構(hybrid spherical-spherical 7R DMM)」、產生{1/𝐺(𝐮)}及{1/𝐺(𝐯)}兩種運動模式之「混合型平面及平面6𝑅1𝑃 不連續可動機構(hybrid planar-planar 6R1P DMM)」等,文中共討論三種 7 桿不連 續可動機構,以及推衍出各自機構之 7 桿連續可動機構。文獻[20]中則為分析具 {𝑅(𝑂1, 𝐮)}及{1/𝐺(𝐰)}兩種運動模式之6𝑅不連續可動機構,同時比較一具不同組成
的6𝑅不連續可動機構現有模型,以及對照該機構為連續可動機構時的組合。文獻 [21]中討論更複雜的8𝑅不連續可動機構,此類機構之運動為:由兩個相交在同一個 1 自由度次群上之 2 自由度流形。換言之,該機構擁有無數個分歧點,可隨時於前 一停止之動作下進行運動模式的交替,例如產生運動模式 {𝑇(𝐰)}{𝑅(𝐷, 𝐮)}和 {𝑇(𝐰)}{𝑅(𝐸, 𝐯)}之機構,被命名為「平面及平面8𝑅不連續可動機構(planar- planar 8R DMM)」。此外,Lee 與 Hervé 在文獻[22]當中討論具{𝑋(𝐱)}及{𝑋(𝐲)}兩種運動 模式之不連續可動機構,將其命名為「𝑋運動分岔並聯機構(parallel mechanism with bifurcation of Schoenflies motion)」。
Yan[26]提出可變拓樸機構,基於機構中可變其類型或方位之接頭,會改變該 機構在運動過程中之拓樸構造。文獻中討論此類機構的特性及合成方法,並以按鈕 鎖為例,此類機構於運作時構件間之相互接觸,造成新的約束而使可動部位改變,
導致接頭種類以及拓樸構造跟著有所變化,造成不連續可動的現象,文中對此類機 構進行分析、修改,最後合成出多種符合需求的機構。
Balli 及 Chand [27]提出另一類之可變拓樸機構。文中討論看似一般的一平面 5 桿連續可動機構,然而此機構運動時會產生「極限位置(extreme position)」,使得 某些接頭失效,改變拓樸構造,而造成不連續可動的現象。
Dai 等人[28]提出了另一種具不連續可動性之變胞機構,利用加入插銷於機構 中來對機構有更多的約束及限制,導致機構當中可動的部分發生改變;或藉由凹槽 的設計來改變某些接頭之性質,使該機構有新的組成,產生不連續可動之現象。文 中討論之合成方法,不僅能用於合成多自由度之變胞機構,亦能產生出更多不同類 型的機構。
近期,Lee 與 Hervé 於文獻[23]討論一具不連續可動性之新型𝑅𝐶 − 𝐶𝑅聯軸器,
於分歧點位置上擁有同向旋轉或反向旋轉兩種選擇,並於文獻[24]中有更詳盡之敘 述。亦提出了文獻[29]之變胞 Bennett 連桿(metamorphic Bennett linkage),將兩旋轉
對分別置入原四連桿 Bennett 機構中之相對的兩個桿件中,形成具有三個運動模式 之不連續可動機構。
前文提出之多種機構,根據作者的定義皆可被稱為不連續可動機構。若從導致 不連續可動性之原因來進行分類,可分為以下三大類。
第一大類不連續可動機構中各接頭種類不變,憑藉著桿件間的角度約束來滿 足該機構的運動,且與桿件的幾何形狀無關。上述機構中屬於此類的機構包含:文 獻[19]中的三種混合型7𝑅不連續可動機構、文獻[20]中的6𝑅不連續可動機構、文獻 [21]中的兩種8𝑅不連續可動機構等、文獻[22]中的𝑋運動分岔並聯機構、文獻[23]及 [24]中的新型𝑅𝐶 − 𝐶𝑅聯軸器等。
第二大類不連續可動機構中各接頭種類會隨著桿件之運作而改變,且會受到 桿件之幾何形狀及相對位置影響,如機構運動時桿件間的互相接觸,可能是阻擋或 是插銷,使得桿件受到更多約束,而造成不連續可動的現象。屬於此大類的文獻包 含:文獻[26]中的按鈕鎖、文獻[28]中的變胞機構。
第三大類不連續可動機構中各接頭種類不變,但與桿件的幾何形狀有相關,如 旋轉對同軸、遇到極限位置等狀況,使得某些接頭失去作用,或是到達機構之分歧 點,而產生不連續可動的現象。屬於此大類的有:文獻[18]中的6𝑅機構、文獻[27]
中的平面 5 桿機構、文獻[29]的變胞 Bennett 連桿機構。
於此三大類不連續可動機構中,已有研究提出系統化的方法來合成第二大類 機構,第三大類則是一般機構的特殊現象,偏屬於工程設計上的特例。而針對第一 大類的研究多只提出分析其運動特性之方法,少有提到機構的產生步驟[19],並未 有詳細的合成討論。唯獨文獻[22]中,除了進行機構運動分析之外,亦有詳盡的合 成過程,主要方法是應用李群運動鏈之替代理論,並對𝑋運動分岔之並聯機構進行 修改,合成出其他擁有相同運動模式之不連續可動機構。然而此研究中的合成步驟 僅能運用在此種機構上,後來羅子欽[25]探討上述之第一大類不連續可動機構之合
成方法,對此類已知的不連續可動機構進行分析,尋找其共同特徵並歸納出第一大 類不連續可動機構的合成流程。但其流程中仍有部分細節未詳盡說明,因此本文將 利用其方法做其他運動模式之合成,並加以驗證與除錯。
3.2 不連續可動機構運動分析方法
首先分析文獻[19]中的混合型球面及球面7𝑅不連續可動機構,如圖 3.1 所示。
圖 3. 1 混合型球面及球面7𝑅不連續可動機構 [19]
此機構之表示法可記作:𝑅𝐳𝐴𝟏𝑅𝐳𝐺𝟐𝑅𝐳𝐵𝟑𝑅𝐳𝐹𝟒𝑅𝐳𝐶𝟓𝑅𝐳𝐸𝟔𝑅𝐳𝐷𝟕。圖 3.1 中顯示此機構處於分歧點 位置的情形,由𝐴、𝐵、𝐶、𝐷四個旋轉對指向點𝑂1,而𝐷、𝐸、𝐹、𝐺四個旋轉對指 向點𝑂2。因此又可寫成:𝑅𝐳𝑂𝟏1𝑅𝐳𝑂𝟐2𝑅𝐳𝑂𝟑1𝑅𝐳𝑂𝟒2𝑅𝐳𝑂𝟓1𝑅𝐳𝑂𝟔2𝑅𝐳𝑂𝟕1。
文獻中選取桿件 7 為地桿、桿件 4 為端效器,經分析後得兩運動模式為 {1/𝑆(𝑂1)}及{1/𝑆(𝑂2)}。以下將改設端效器於桿件 5 上,地桿仍為桿件 7 ,則端效 器之運動表示為{𝐿(7,5)},而自地桿至端效器間之兩條運動鏈的運動分別為:
{𝐺1} = {𝑅(𝑂1, 𝐳𝟏)}{𝑅(𝑂2, 𝐳𝟐)}{𝑅(𝑂1, 𝐳𝟑)}{𝑅(𝑂2, 𝐳𝟒)}{𝑅(𝑂1, 𝐳𝟓)}
{𝐺2} = {𝑅(𝑂1, 𝐳𝟕)}{𝑅(𝑂2, 𝐳𝟔)}
此時端效器之運動可記作:
{𝐿(7,5)} = {𝐺1} ∩ {𝐺2}
{𝐿(7,5)}
= {𝑅(𝑂1, 𝐳𝟏)}{𝑅(𝑂2, 𝐳𝟐)}{𝑅(𝑂1, 𝐳𝟑)}{𝑅(𝑂2, 𝐳𝟒)}{𝑅(𝑂1, 𝐳𝟓)}{𝐿(7,5)} ==∩ {𝑅(𝑂
1, 𝐳𝟕)}{𝑅(𝑂2, 𝐳𝟔)}經分析後可得端效器具有兩種運動模式──{1/𝑆(𝑂1)}及{1/𝑆(𝑂2)}。{1/𝑆(𝑂1)}
表示{𝑆(𝑂1)}之 1 維次流形,產生一單自由度之球面運動。同理可知{1/𝑆(𝑂2)}為另 一單自由度球面運動。在此仿照文獻[20]使用聯集符號「∪」於運動式中,藉以表 示此機構具有該兩種運動模式,但無法同時作動的特性。並且將端效器之運動記作:
{𝐿(7,5)} ⊇ {1/𝑆(𝑂1)} ∪ {1/𝑆(𝑂2)}
當機構進行運動模式{1/𝑆(𝑂1)}時,接頭𝐸、𝐹、𝐺為固定不動,而端效器之運 動可改寫成:
{𝐿(7,5)}𝑆1 = {𝑅(𝑂1, 𝒛𝟏)}{𝐸}{𝑅(𝑂1, 𝒛𝟑)}{𝐸}{𝑅(𝑂1, 𝒛𝟓)} ∩ {𝑅(𝑂1, 𝒛𝟕)}{𝐸}
{𝐿(7,5)}
𝑆1 = {𝑅(𝑂1, 𝒛𝟏)}{𝑅(𝑂1, 𝒛𝟑)}{𝑅(𝑂1, 𝒛𝟓)} ∩ {𝑅(𝑂1, 𝒛𝟕)}{𝐿(7,5)}
𝑆1 = {1/𝑆(𝑂1)}由於此機構並不僅有此運動模式,因此以{𝐿(7,5)} ⊇ {1/𝑆(𝑂1)}表示來概括。
另一方面,機構進行運動模式{1/𝑆(𝑂2)}時,接頭𝐴、𝐵、𝐶為固定不動,而端效 器之運動可改寫成:
{𝐿(7,5)}𝑆2 = {𝐸}{𝑅(𝑂2, 𝒛𝟐)}{𝐸}{𝑅(𝑂2, 𝒛𝟒)}{𝐸} ∩ {𝑅(𝑂1, 𝒛𝟕)}{𝑅(𝑂2, 𝒛𝟔)}
{𝐿(7,5)}
𝑆2 = {𝑅(𝑂2, 𝒛𝟐)}{𝑅(𝑂2, 𝒛𝟒)} ∩ {𝑅(𝑂1, 𝒛𝟕)}{𝑅(𝑂2, 𝒛𝟔)}{𝐿(7,5)}
𝑆2 = {1/𝑆(𝑂2)}則{𝐿(7,5)} ⊇ {1/𝑆(𝑂2)}。
基於群理論之表示計算,得證{𝐿(7,5)} ⊇ {1/𝑆(𝑂1)} ∪ {1/𝑆(𝑂2)}。
對於此機構做進一步之分析,探討其不連續可動性的因素。首先須了解機構於 分歧點的狀況,由於此位置狀態下可同時滿足兩相異球面運動之條件──分別有足
![表 2. 1 李代數結構對速度場之表示式 [4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9605392.631457/18.892.123.781.126.1043/表21李代數結構對速度場之表示式4.webp)
![圖 2. 3 雙平面運動鏈 [7] 然而,3](https://thumb-ap.123doks.com/thumbv2/9libinfo/9605392.631457/23.892.268.793.113.622/雙平面.webp)