VBS-RTK GPS輔助UAV影像自率光束法空三平差之研究 - 政大學術集成
141
0
0
全文
(2) 授權頁. I.
(3) II.
(4) 謝誌 首先必須感謝我的家人!謝謝讓我任性點菜的母親大人,也謝謝爸爸 大人假日帶我和歐雄爬山舒壓,再來謝謝姊姊大人資助學費讓我完成碩士 學位,而後感謝哥哥大人─謝謝你總是早我一步把零食吃光,讓我總是找 不到零食,使我在研究所期間不變胖!最後則是要感謝每個夜晚總是在門 口默默等候我的歐雄!同時,感謝政大教導我許多專業知識的老師們,謝 謝黃灝雄老師讓我體會再多的準備也要有最壞打算,謝謝林老生老師淺顯 易懂的教學以及讓我高分通過獲得獎學金,謝謝詹進發老師的時時關心真. 政 治 大 師讓我發現軍人也可以如此親切、和藹與熱心! 立. 是一股暖流,謝謝林士淵老師讓我知道老師也可以很八卦,謝謝甯方璽老. ‧ 國. 學. 再來則是要感謝研究所的同志們,謝謝邱家人舉辦不間斷餵食活動, 特別是承一學長及顏董大大,讓我可以在爆肝之餘逞口腹之快。謝謝安勤. ‧. 舉辦各種佳節活動,謝謝梁平給我罵,謝謝山姆總是那麼豪小,謝謝廖思. sit. y. Nat. 睿的音樂伴我度過無涯的研究迴圈,謝謝提姆藉 Adeline 讓我看到不同面貌,. al. er. io. 謝謝承一大大頂著邱老師讓我躲在後面。謝謝汝晏教我漂亮,謝謝君君讓. v. n. 我見識勇者的強大,謝謝廖廖讓我看見三秒入睡的厲害,謝謝翊甯教我不. Ch. engchi. i n U. 正常知識,謝謝 TSM 長得這麼帥,謝謝孔繁恩讓我知道我多麼才疏學淺。 而後則是感謝我九年的同窗好友蕭伊伶,謝謝你總是聽我抱怨,也謝 謝你的不間斷八卦,更謝謝你教我不正常知識,這方面突飛猛進直逼博士 學位,還要謝謝歐雄長得比咕嚕可愛,最後則要謝謝你總是願意跟我打賭, 讓我保持穩賺不賠的地位。但再多謝謝也講不完,所以你了就好! 最後感謝口委們外,還要重點感謝恩師邱式鴻,謝謝你這兩年來對我 肝的照顧,讓我知道養生跟運動是很重要的,但對老師也相當抱歉,兩年 來老師挑的錯字都可以編成萬言書了,抱歉抱歉!最後當然是要謝謝老師 給我畢業證書,讓我知道我這兩年沒有白活,謝謝恩賜,皇恩浩蕩啊! III.
(5) 摘要 無人飛行載具(Unmanned Aerial Vehicle, UAV)於要求精度之圖資測製 應用時,因飛行高度較低並可在雲下飛行取像,與大型載具相比可更機動 性獲取空間解析度較高之影像,雖無法如大型載具酬載大像幅感測器供大 區域圖資製作,但於小區域之圖資更新卻相當適合。但一般 UAV 因酬載重 量限制,僅可酬載體積小且重量輕之感測器,如非量測型相機及低精度定 位定向系統,即 AHRS 系統。因此,本研究嘗試在 UAV 上酬載 Trimble BD970 GNSS OEM GPS 接收模組,此 GPS 接收模組體積小且重量輕可安. 政 治 大 訊,再經時間內插相機曝光瞬時的 GPS 資訊供空中控制使用,輔助 UAV 立 置於 UAV 上,並透過 VBS-RTK GPS 定位技術獲取 UAV 精確飛行軌跡資. ‧ 國. 學. 影像空中三角測量(簡稱空三)平差,以降低地面控制點需求。 但欲引入 GPS 觀測量供空中控制使用必須考量 GPS 天線與相機投影中. ‧. 心偏移量之問題,但因 UAV 所酬載之非量測型相機,將造成此偏移量不易. sit. y. Nat. 透過地面測量方式測得,於本研究將於空三平差時使用線性漂移參數克服. al. er. io. 此偏移量無法量測之問題;此外,UAV 所酬載之非量測型相機,相機參數. v. n. 乃透過地面近景攝影測量以自率光束法平差方式率定所得,但率定所得相. Ch. engchi. i n U. 機參數無法完全描述相機在航拍取像時的情況,故本研究於空三平差將採 用自率光束法克服相機參數率定不完全之問題。實驗中,首先確定 GPS 模 組 BD970 在 VBS-RTK GPS 定位技術下在地面高速移動時可獲得高精度的 定位成果;接續驗證線性漂移參數及自率光束法平差於此研究的適用性; 最後亦探討不同地面控制點配置及來源對空三平差之精度探討,並提出 1/5000 基本圖圖資測製精度要求下,VBS-RTK GPS 輔助 UAV 影像自率光 束法空三平差的地面控制點最適配置。 關鍵字:無人飛行載具、虛擬基準站即時動態定位、線性漂移參數、自率 光束法、空三平差 IV.
(6) Abstract UAV(Unmanned Aerial Vehicle) is currently used in civil purpose such as mapping and disaster monitoring. One of UAV advantages is to collect images with high resolution for mapping demand. However, due to payload limitations of UAV, it is difficult to mount metric aerial camera and precise POS(Positioning and Orientation System) device. Instead, only the non-metric camera and the low accurate AHRS (Attitude and Heading Reference System) can be installed. For mapping demands, Trimble BD970 GNSS OEM board will. 政 治 大 information for AT 立 (aerial triangulation) by VBS-RTK(Virtual Base Station -. be carried on the UAV to collect the high accurate flying trajectory as control. ‧ 國. 學. Real Time Kinematic) GPS technique. Meanwhile self-calibration bundle adjustment will be employed for AT(Aerial Triangulation) to overcome the. ‧. imperfect calibration of non-metric camera by the close-range photogrammetric. sit. y. Nat. approach. The precise offset between image perspective center and GPS antenna. n. al. er. io. center, called GPS antenna-camera offset, is hard to measure in centimenter. i n U. v. level by terrestrial measurement approach. Therefore the drift parameters will. Ch. engchi. be utilized to solve the problem of GPS antenna-camera offset while performing bundle adjustment with self-calibration for AT of UAV images. In the experiments of this study, the height positioning accuracy of BD970 by VBS-RTK GPS approach at high speed movement will be proved firstly. Then the adaptability of drift parameters and self-calibration for GPS supported AT of UAV images will be verified. Finally, the accuracy of AT by using different control information will be analized and appropriate configuration of GCPs(Ground Control Points) for VBS-RTK GPS supported self-calibration bundle adjustment for AT of UAV images will be proposed under the mapping V.
(7) demand with the scale of 1 : 5000. Keywords: UAV; VBS-RTK GPS; drift parameter; self-calibration bundle adjustment; aerial triangulation.. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. VI. i n U. v.
(8) 目錄 第一章 緒論.................................................................................................... 1 第一節 研究動機與目的 ......................................................................... 1 第二節 遭遇問題與解決方法 ................................................................. 5 第三節 研究流程..................................................................................... 7 第二章 文獻回顧 .......................................................................................... 10 第一節 GPS 動態定位........................................................................... 11. 政 治 大 第三節 GPS 輔助光束法平差與地面控制點之關係 ............................ 20 立 第二節 GPS 動態定位成果歸算 ........................................................... 15. ‧ 國. 學. 第四節 非量測相機 ............................................................................... 23 第三章 理論基礎和研究方法....................................................................... 27. ‧. 第一節 虛擬基準站即時動態定位........................................................ 28. y. Nat. io. sit. 第二節 自率光束法空三平差 ............................................................... 36. er. 第三節 GPS 輔助自率光束法空三平差................................................ 44. al. n. v i n .............................................................................. 54 第四章 研究材料及實驗C hengchi U 第一節 儀器及軟體 ............................................................................... 54 第二節 實驗配置................................................................................... 61 第三節 BD970 動態定位地面測試 ....................................................... 64 第四節 線性漂移參數之適用性 ........................................................... 75 第五節 自率光束法於 GPS 輔助空三平差之適用性 ........................... 83 第六節 點特徵航空影像控制資訊建置地控點之可行性 ..................... 90 第七節 GPS 輔助 UAV 影像自率光束法空三平差 .............................. 98 第八節 不同地面控制點來源及配置 ...................................................104 VII.
(9) 第五章 結論與建議 .....................................................................................115 第一節 結論 .........................................................................................115 第二節 建議 .........................................................................................117 參考文獻 ......................................................................................................119. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. VIII. i n U. v.
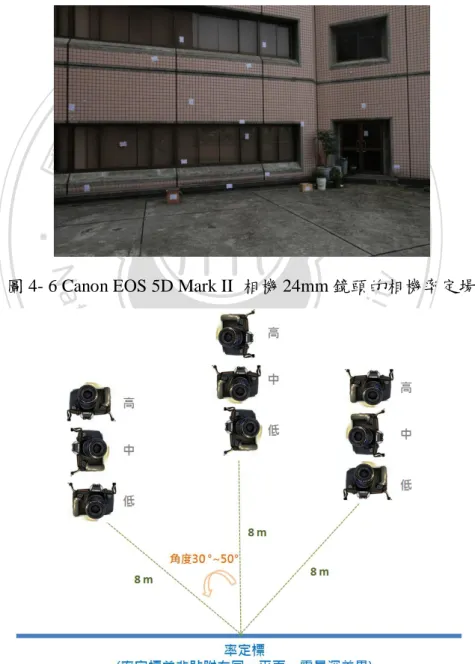
(10) 圖目錄 圖 1- 1 研究流程圖......................................................................................... 9 圖 2- 1 以時間內插求相機曝光時 GPS 定位之示意圖................................ 15 圖 2- 2 動態差分定位示意圖 ....................................................................... 16 圖 2- 3 相機投影中心與 GPS 天線間偏移量示意圖 ................................... 17 圖 2- 4 不同軟體率定的輻射畸變差比較 .................................................... 24 圖 3- 1 單主站 RTK 定位原理示意圖 ........................................................... 28 圖 3- 2 VBS-RTK GPS 演算流程圖 ............................................................. 31. 政 治 大 圖 3- 4 GPS 國內基準站分布 立 ........................................................................ 34. 圖 3- 3 RTK 與 VBS-RTK 於同等精度之下所需基準站數量示意圖........... 33. ‧ 國. 學. 圖 3- 5 e-GPS 即時動態定位系統服務區配置圖 ......................................... 34 圖 3- 6 VBS-RTK GPS 定位示意圖 .............................................................. 35. ‧. 圖 3- 7 光束法空三平差示意圖 ................................................................... 37. sit. y. Nat. 圖 3- 8 iWitnessPRO 使用的 20 個黑白率定標............................................. 39. al. er. io. 圖 3- 9 率定標模糊情形 ................................................................................ 40. v. n. 圖 3- 10 單像後方交會其未知數之間之相關係數矩陣 ................................ 44. Ch. engchi. i n U. 圖 3- 11 GPS 輔助單像後方交會其未知數之間相關係數矩陣 .................... 45 圖 3- 12 投影中心與 GPS 天線中心間偏移量示意圖 ................................. 46 圖 3- 13 GPS 輔助空三平差地面控制點分佈圖(一)..................................... 49 圖 3- 14 GPS 輔助空三平差地面控制點分佈圖(二)..................................... 50 圖 3- 15 GPS 輔助空三平差地面控制點分佈圖(三)..................................... 50 圖 3- 16 GPS 輔助自率光束法空三平差地面控制點配置一 ........................ 52 圖 3- 17 GPS 輔助自率光束法空三平差地面控制點配置二及三 ................ 53 圖 4- 1 Trimble BD970 GNSS OEM 接收模組及天線 ................................. 54 圖 4- 2 Canon EOS 5D-II 與 24mm 鏡頭 ...................................................... 56 IX.
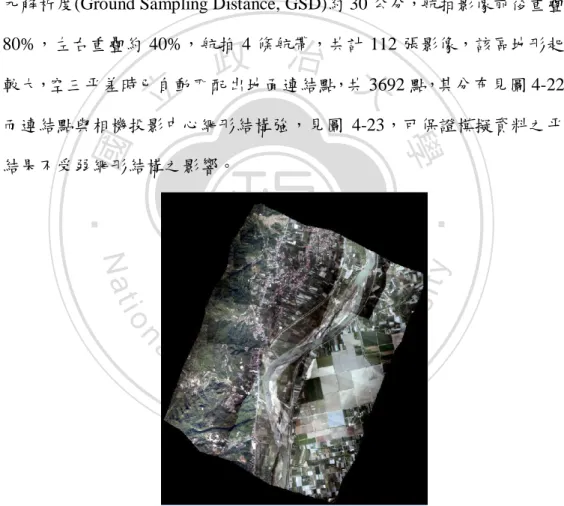
(11) 圖 4- 3 旋翼機:MD4-200 ........................................................................... 57 圖 4- 4 定翼式 UAV ..................................................................................... 57 圖 4- 5 UAV 組件示意圖 .............................................................................. 57 圖 4- 6 Canon EOS 5D Mark II 相機 24mm 鏡頭的相機率定場 .................. 58 圖 4- 7 率定時像片曝光站分布示意圖 ........................................................ 58 圖 4- 8 率定標與相機於物空間分布圖示 .................................................... 59 圖 4- 9 ORIMA 不同觀測量加入之視窗 ....................................................... 60 圖 4- 10 ORIMA 相機參數率定時之選項視窗 ............................................. 60. 政 治 大 圖 4- 12 GPS 接收模組 BD970 以 e-GPS 服務即時解算畫面 ...................... 65 立 圖 4- 11 實驗流程......................................................................................... 63. 圖 4- 13 GPS 接收模組靜置試驗區 .............................................................. 65. ‧ 國. 學. 圖 4- 14 實地測試情況 ................................................................................. 66. ‧. 圖 4- 15 位於政大綜合院館 16 樓樓頂之 GPS 主站 ................................... 66. y. Nat. 圖 4- 16 移動站之 GPS 天線靜置於車頂 ..................................................... 70. er. io. sit. 圖 4- 17 後處理動態差分定位之定位軌跡 .................................................. 71 圖 4- 18 快速移動下 GPS 接收模組 BD970 之 VBS-RTK GPS 定位軌跡 .. 72. al. n. v i n 圖 4- 19 高速移動下 BDC 970 之 VBS-RTK GPS 與後處理動態差分定位成果 hengchi U 套疊 ................................................................................................ 72. 圖 4- 20 快速移動下 VBS-RTK GPS 定位成果與後處理動態差分定位之差 值部分成果顯示 ............................................................................ 73 圖 4- 21 線性漂移參數適用性之高雄美濃試驗區........................................ 75 圖 4- 22 線性漂移參數適用性之試驗區連結點分布 .................................... 76 圖 4- 23 線性漂移參數適用性之試驗區連結點與投影中心網形 ................ 76 圖 4- 24 模擬資料平差確定無誤之圖示 ...................................................... 77 圖 4- 25 線性漂移參數模擬實驗之實驗流程圖 .......................................... 78 X.
(12) 圖 4- 26 線性漂移參數模擬實驗時地面控制點配置 .................................... 79 圖 4- 27 線性漂移參數模擬實驗時檢核點配置 .......................................... 80 圖 4- 28 各觀測量皆加入隨機誤差解算之漂移附加差數常數項................ 81 圖 4- 29 僅 GPS 觀測量加入隨機誤差解算之漂移附加差數常數項 .......... 81 圖 4- 30 花蓮縣吉安鄉航拍範圍 ................................................................. 84 圖 4- 31 ORIMA 自率光束法空三平差時之相機參數設定 .......................... 85 圖 4- 32 自率光束法空三平差適用性實驗中地面控制點及像片分布 ......... 86 圖 4- 33 自率光束法空三平差適用性實驗中檢核點及像片分布 ................ 86. 政 治 大 圖 4- 35 自率光束法空三平差適用性實驗中連結點與投影中心網形結構 . 87 立 圖 4- 34 自率光束法空三平差適用性實驗中連結點分布 ............................ 87. 圖 4- 36 航帶首尾佈設控制鏈其地面控制點分布圖 ................................... 92. ‧ 國. 學. 圖 4- 37 增加正交航帶提升幾何條件其地面控制點分布圖 ........................ 92. ‧. 圖 4- 38 航帶首尾佈設控制鏈之 GPS 輔助自率光束法空三平差檢核點分布. y. Nat. 圖 .................................................................................................... 93. er. io. sit. 圖 4- 39 航帶首尾佈設控制鏈之 GPS 輔助自率光束法空三平差連結點分布 ....................................................................................................... 93. al. n. v i n 圖 4- 40 航帶首尾佈設控制鏈之 C h GPS 輔助自率光束法空三平差連結點與投 engchi U 影中心網形結構............................................................................. 93. 圖 4- 41 點特徵航空影像控制資訊建置地控可行性之網形幾何................ 96 圖 4- 42 地面控制點分布圖 ........................................................................100 圖 4- 43 GPS 輔助 UAV 影像自率光束法空三平差實驗地面連結點分布 .100 圖 4- 44 GPS 輔助 UAV 影像自率光束法空三平差實驗網形 ....................100 圖 4- 45 UAV 影像自率光束法空三平差未知數間相關係數......................102 圖 4- 46 GPS 輔助 UAV 影像自率光束法空三平差未知數間相關係數 .....102 圖 4- 47 自率參數間相關係數示意圖 .........................................................102 XI.
(13) 圖 4- 48 VBS-RTK GPS 輔助 UAV 影像自率光束法空三平差地控點 配置方 式(3) ...............................................................................................105 圖 4- 49 航帶首尾佈設控制鏈方式外方位參數與相機參數之相關係數 ...107 圖 4- 50 增加正交航帶配合 6 GCPs 方式外方位參數與相機參數之相關係數 .......................................................................................................107 圖 4- 51 航帶首尾佈設控制鏈相機參數間之相關係數 ..............................107 圖 4- 52 增加正交航帶配合 6 GCPs 相機參數間之相關係數 ....................107 圖 4- 53 不同地控來源配置:4 地面實測+7 點特徵航空影像控制資訊 ....109. 政 治 大 圖 4- 55 不同地控來源配置:4 地面實測+4 點特徵航空影像控制資訊 ....109 立 圖 4- 54 不同地控來源配置:6 地面實測+5 點特徵航空影像控制資訊 ....109. 圖 4- 56 不同地控來源配置:2 地面實測+6 點特徵航空影像控制資訊 ....110. ‧ 國. 學. 圖 4- 57 不同地控來源配置:4 地面實測+2 點特徵航空影像控制資訊 ....110. ‧. 圖 4- 58 結合不同地控來源配置:2 地面實測+4 點特徵航空影像控制資訊. y. Nat. ......................................................................................................110. er. io. sit. 圖 4- 59 結合不同地控來源之配置對 GPS 輔助 UAV 影像自率光束法空三平 差高程精度影響表 .........................................................................112. al. n. v i n 圖 4- 60 建議地面控制點配置 C h .....................................................................114 engchi U. XII.
(14) 表目錄 表 3- 1 航影像點控制區塊產製方式分類表 ................................................ 51 表 4- 1 Trimble BD970 GNSS OEM 接收模組規格 ..................................... 54 表 4- 2 Canon EOS 5D-II 相機規格 ............................................................... 56 表 4- 3 RTK 測得點位坐標 ........................................................................... 67 表 4- 4 GPS 接收模組 BD970 以 VBS-RTK GPS 之測量成果 ..................... 68 表 4- 5 GPS 接收模組 BD970 以 VBS-RTK GPS 解算坐標與 RTK 測量成果 之坐標差異量................................................................................... 69. 政 治 大 表 4- 7 差值統計量........................................................................................ 73 立 表 4- 6 BD970 以 VBS-RTK GPS 解算坐標之均方根誤差 .......................... 69. ‧ 國. 學. 表 4- 8 各觀測量之隨機誤差 ........................................................................ 77 表 4- 9 模擬資料 GPS 輔助 UAV 影像自率光束法均方根誤差 mode: no .. 81. ‧. 表 4- 10 模擬資料 GPS 輔助 UAV 影像自率光束法均方根誤差 mode: drift. sit. y. Nat. ....................................................................................................... 81. n. al. er. io. 表 4- 11 自率光束法於 GPS 輔助空三平差適用性試驗區相關試驗資料說明. i n U. v. ....................................................................................................... 83. Ch. engchi. 表 4- 12 相機參數......................................................................................... 84 表 4- 13 VBS-RTK GPS 輔助 UAV 影像光束法空三平差檢核點檢核表 .... 88 表 4- 14 VBS-RTK GPS 輔助 UAV 影像自率光束法空三平差檢核點檢核表 ........................................................................................................ 88 表 4- 15 點特徵航空影像控制資訊建置地控可行性實驗試驗區相關試驗資 料說明 ........................................................................................... 90 表 4- 16 花蓮縣吉安鄉地面實測控制點配置其空三平差精度 ................... 95 表 4- 17 花蓮縣吉安鄉點特徵航空影像控制資訊控制點配置其空三平差精 度 .................................................................................................. 95 XIII.
(15) 表 4- 18 點特徵航空影像控制資訊建置地控可行性空三平差精度比較表 96 表 4- 19 GPS 輔助 UAV 影像自率光束法空三平差實驗試驗區相關試驗資料 說明 .............................................................................................. 98 表 4- 20 UAV 影像空三平差精度檢核表(GCPs:點特徵航空影像控制資訊) .....................................................................................................101 表 4- 21 以點特徵航空影像控制資訊的不同地面控制點配置之 GPS 輔助 UAV 影像自率光束法空三平差精度表 .....................................106 表 4- 22 不同地控來源及配置其 GPS 輔助 UAV 影像自率光束法空三平差. 政 治 大. 精度表 ..........................................................................................112. 立. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. XIV. i n U. v.
(16) 第一章 緒論 第一節 研究動機與目的 較具規模之無人飛行載具(Unmanned Aerial Vehicle, UAV)由軍事應用 所發展,美國軍方將 UAV 定義為不需乘載駕駛員,並可事先規劃飛行任務 及酬載感測器,飛行時透過無線電設備在半自動或全自動下執行飛行任務 (Eisenbeiss, 2004)。與傳統航測相比,UAV 被視為一種新的攝影測量平台,. 政 治 大. 可依據任務需求選擇飛行高度以及感測器,除了航空攝影測量,還可應用. 立. 於近景攝影測量於測繪人造或自然地物之三維模型(Lerma, 2010; Reich,. ‧ 國. 學. 2012)。此外,在此平台上所酬載感測器,不再侷限於傳統光學的航攝感測 器,熱紅外儀、近紅外相機、高光譜儀及光達感測器也可酬載於 UAV 平台. ‧. (Berni et al., 2009; Hunt et al., 2005; Lin et al., 2011; Zarco-Tejada et al.,. sit. y. Nat. 2012)。. n. al. er. io. UAV 具機動性強、成本低廉、即時回覆以及可於高風險之惡地環境下. i n U. v. 執行航拍之優勢,而廣泛應用於不同領域中,如災難即時監測、自然資源. Ch. engchi. 監控(Horcher and Visser, 2004; Zhou et al., 2005)、作物監控(Kise et al., 2005; Laliberate, et al., 2007) 以 及 要 求 精 度 之 古 蹟 數 位 典 藏 及 維 護 (Grammatikopoulos et al., 2007)。於要求精度之圖資測製時,傳統航測因載 具及航攝相機體積較龐大且需乘載駕駛員,無法以較低航高飛行。相較之 下,與大型載具相比可更機動性獲取空間解析度較高之影像,雖無法如大 型載具酬載大像幅感測器供大區域圖資製作,但於小區域之圖資更新卻相 當適合。且 UAV 具機動性且可依據任務需求選擇飛行高度,獲取空間解析 度較高之影像,並可在多雲天候條件下於雲下拍攝取像(Hruska et al., 2005), 1.
(17) 因此在製圖應用層面,圖資測製時可產製正射影像(Bendea et al., 2007; Patias et al., 2007)、地形圖(Li, 2011)、數值地型模型(Eisenbeiss and Zhang, 2006; Haarbrink and Eisenbeiss, 2008)及三維模型建置(Pueschel et al., 2008)。 甚至在建置三維虛擬城市時,亦可由 UAV 獲取高解析度的側拍影像,經適 當的影像糾正後,可作為三維建物模型側面紋理來源(Küng et al., 2011)。 上述所提及於要求精度圖資測製時,航拍影像需先精確定位定向,方 法 分 為 直 接 地 理 定 位 (direct georeferencing) 以 及 間 接 地 理 定 位 (indirect georeferencing)。所謂直接地理定位, 即由高精度全球定位系統(Global. 政 治 大 整合而成的定位定向系統(Positioning Orientation Sytems, POS)獲取航拍時 立. Positioning Systems, GPS)與慣性導航系統(Inertial Measurement Unit, IMU). 載具的定位定向資訊,再經過系統率定(boresight calibration)即可將定位定. ‧ 國. 學. 向成果歸算至相機外方位參數,免除空中三角測量(Aerial Triangulation, AT),. ‧. 後簡稱空三。其中 IMU 的精度與體積、重量成正比,當 IMU 精度越高其. y. Nat. 體積重量也就越大,一般商用 UAV 將無法負荷。目前雖有研究針對 UAV. er. io. sit. 影像直接地理定位,但僅使用 GPS 單頻載波相位觀測量(carrier phase)以後 處理動態差分定位獲得優於導航型之 GPS 三維定位資訊,並搭配導航級姿. al. n. v i n 態參數,致使研究成果其均方根誤差達公尺級,精度無法應用至要求精度 Ch engchi U 的圖資測製(Bláha et al., 2011; Chiang et al., 2012)。. 因此,UAV 影像欲應用於要求精度的圖資測製時仍需透過間接地理定 位,所謂間接地理定位是透過航測空三平差的作業程序,量測適當地面控 制點(Ground Control Points, GCPs)及其在影像對應的像點坐標與影像間的 連結點(tie point)坐標後,配合精確的相機參數,透過共線式條件以最小二 乘法原理解算 UAV 航拍影像於物空間的成像位置與姿態(即外方位參數)。 由於控制點之控制測量需耗費大量勞力、時間及成本,一旦測製區域為山 區或不易到達之處,將造成控制點取得不易或成本增加。若可減少地面控 2.
(18) 制點之需求,將可降低測製成本及提高測製效率。傳統航測已有相當多研 究將 GPS 觀測量加入空三平差的程序,研究成果顯示可將地面控制點需求 降低(Ackermann, 1997; Bilker, 1998; Friess, 1990)。 現今 一般商用 UAV 平台 大多使用 單點定位 之 GPS 定位成果 與 AHRS(Attitude and Heading Reference System)提供飛行載具三維坐標以及 姿態參數,其精度不如傳統航測載具所酬載 POS 系統,雖可作直接地理對 位,但精度不佳,僅適用於不要求精度的土地利用調查及災難救援 (Bendea et al., 2007; Eisenbeiss et al., 2005),對於要求精度圖資測製應用仍是有所侷. 政 治 大 曾利用模擬資料測試 UAV 影像欲引入 GPS 及 IMU 資料輔助影像定位定向, 立. 限。國土測繪中心(2010)於「100 年度發展無人飛行載具航拍技術作業案」. 其 GPS 精度需達公分級,IMU 精度則需達 0.003°才可有效輔助 UAV 影像. ‧ 國. 學. 空三平差。但精度達 0.003°IMU 儀器重達六公斤,一般商用 UAV 無法酬. ‧. 載,且金額高達數百萬,若其酬載於一般商用 UAV 將不符風險效益。因此,. y. Nat. 本研究欲於 UAV 上酬載雙頻 GPS 接收模組並使用虛擬基準站即時動態定. er. io. sit. 位(Virtual Base Station - Real Time Kinematic GPS, VBS-RTK GPS)技術,藉 以提升 UAV 所酬載 GPS 模組之定位精度,輔助 UAV 影像精確定位定向。. al. n. v i n 在空三平差程序中,將經時間內插的相機拍攝瞬間之 GPS 觀測量作為空中 Ch engchi U. 控制使用,以降低空三平差時地面控制點需求,增進 UAV 航拍影像測製圖. 資的效益。此外,於 UAV 上酬載雙頻 GPS 接收模組,與酬載高精度 IMU 相比,其風險較小、儀器成本亦較低,較具經濟效益。 因此,本研究目的係藉由符合測製精度需求之 GPS 三維坐標觀測量, 以降低空三平差的地面控制點需求及重覆性的外業測量工作,節省測製成 本,並促進 UAV 航測製圖之作業效率。此外,使用 VBS-RTK GPS 不僅可 提供精確的飛行軌跡,在成本及勞力考量下,甚至不需派遣人員至測製區 域內架設基準站,只需在 UAV 上酬載雙頻之 GPS 接收模組,便可透過國 3.
(19) 內國土測繪中心所建置之 e-GPS 服務,產生虛擬基準站觀測量,再以 RTK 定位技術以即時或後處理方式,求得 UAV 精確飛行軌跡,提供空三平差中 高精度空中控制資訊。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 4. i n U. v.
(20) 第二節 遭遇問題與解決方法 本研究擬以 VBS-RTK GPS 提高 UAV 上 GPS 觀測量的精度,再加入 此高精度 GPS 觀測量至 UAV 影像空三平差,提供大量空中控制觀測量, 降低地面控制點需求。欲達此目的,首先面臨 GPS 模組的選擇,該模組必 須能夠接收雙頻載波相位觀測資料,且定位精度需符合 GPS 輔助空三平差 之精度需求。因此,選取合適的 GPS 設備後,需於地面測試以 VBS-RTK GPS 定位其成果是否符合 GPS 輔助空三平差之精度需求。. 政 治 大 UAV 上進行航拍取像,但由於 GPS 定位成果與相機曝光瞬時三維位置及時 立. 確定 GPS 接收模組其定位精度符合需求後,即可將 GPS 設備酬載於. 間標籤並非一致,欲使用 VBS-RTK GPS 定位成果於要求精度之圖資測製. ‧ 國. 學. 的空三平差過程中,將面臨 GPS 定位成果空間歸算及時間內插問題。空間. ‧. 歸算部分於傳統大型載具,因酬載量測型相機,以地面測量時透過像片框. y. Nat. 標可約略測得相機投影中心,並藉由旋轉矩陣得 GPS 天線至相機投影中心. er. io. sit. 偏移量;但 UAV 所酬載感測器為非量測型相機,相機中的感光元件(Charge Coupled Device, CCD)體積相當小僅數毫米且無法拆卸,造成 GPS 天線至相. n. al. Ch. 機投影中心偏移量無法量測。. engchi. i n U. v. 過去文獻提及線性漂移參數(drift parameters)可克服 GPS 天線至相機投 影中心偏移量量測不完全所引起之系統誤差(Blankenberg, 1992),而掛載於 LPS(Leica Photogrammetry Suite)上的空三平差軟體 ORIMA(ORIentation MAnagement)作者 Hinsken(2002)提出以線性漂移參數中常數項可克服 GPS 天線至相機投影中心偏移量未量測之問題;於其他文獻則是提及此線性改 正參數除可克服 GPS 空間歸算及時間內插不完全所引起之系統誤差外,亦 可解決 GPS 定位過程因週波脫落(cycle slip)導致整數週波未定值(integer ambiguity)解算不精確之問題,甚至坐標基準不同亦可透過此參數部分克服 5.
(21) 之(Ackermann, 1994)。將上述所提及之系統誤差影響降至最低,GPS 觀測 資料才發揮空中控制之效用,降低地面控制點需求。 此外,因一般商用 UAV 酬載能力有限,僅重量較輕、體積較小的非量 測相機可酬載於 UAV 上。但非量測型相機因製作成本較低,穩定性較量測 型相機差,欲應用於精度要求之圖資測製時,相機需事先率定(Hongxia et al., 2007)。而目前率定方式多以地面近景攝影測量方式率定,加上各率定軟體 具備不同相機率定標及率定流程,導致率定成果不一致,率定成果將因率 定軟體、率定環境不同而有所變化。但 UAV 取像條件又無法與率定環境(尤. 政 治 大 取像時之情況,於空三平差過程將造成系統誤差。此時,可於空三平差時 立 其是取像距離)保持一致,因此導致率定所得參數無法完全描述相機於航拍. 引入自率光束法平差(self-calibration bundle adjustment)克服 UAV 取像與率. ‧ 國. 學. 定環境無法保持一致之問題(謝幸宜,2011; Lin, 2008; Tahar et al., 2011;. ‧. Rosnell et al., 2011; Zhou et al., 2006)。. y. Nat. 故本研究使用 GPS 輔助 UAV 影像空三平差,引入線性漂移參數解決. er. io. sit. GPS 定位及歸算過程所造成之系統誤差;另一方面為克服非量測相機及率 定不完全所引起像點系統誤差,則使用自率光束法空三平差克服。因於空. al. n. v i n 三平差引入線性漂移參數及自率光束法,因此仍需搭配適當地面控制點以 Ch engchi U 穩定未知數之求解。. 由於地面控制點建置以往皆採用地面施測控制測量,此施測方式需耗 費一定時間、人力及製圖成本。而歷年來已累積大量經空三平差之資料及 圖資,若在已完成空三平差之立體模型量測自然點作為地面控制資訊,則 可省略地面控制點之控制測量程序及成本,此概念稱為點特徵航空影像控 制資訊(control information)。因此,本研究亦透過點特徵航空影像控制資訊 概念,探討以點特徵航空影像控制資訊作為空三平差地面控制點是否恰 當。 6.
(22) 第三節 研究流程 綜合上節所述,本研究將使用 Trimble 所開發之 BD970 GPS 接收模組 解算的精確 UAV 飛行軌跡,此 BD970 接收模組並非商用 GPS 接收儀,又 因尚無文獻深入探討 VBS-RTK GPS 於高速移動情況下之定位精度及其輔 助空三平差之可行性。因此於本研究第一部分,必須確定此接收模組在高 速移動下其定位精度是否可達公分級,見圖 1-1 藍底黑字部分。若符合精 度需求後續才可使用此模組以 VBS-RTK GPS 獲取 UAV 精確飛行軌跡。. 政 治 大 GPS 雙頻載波相位觀測量後續以 VBS-RTK GPS 技術精確解算 UAV 飛行軌 立. 後續將此接收模組安置於 UAV 上,並於 UAV 航拍取像過程中接收. 跡。但由於 GPS 記錄時間並非對應至相機曝光瞬間,必須以線性內插求出. ‧ 國. 學. 每一張像片曝光瞬時所對應之定位成果,見圖 1-1 紫底黑字處。經時間內. ‧. 插後的 GPS 觀測資料即可將其視為觀測量加入 UAV 影像空三平差。. y. Nat. 然因 UAV 酬載非量測相機,使用前必須經相機率定,率定過程、方式. er. io. sit. 皆依率定軟體 iWitnessPRO 建議布標及拍攝(Photometrix, 2010),透過自動 計算獲得相機參數,見圖 1-1 黃底黑字部分。但由於率定環境與率定成果. al. n. v i n 具高相關性,加上 UAVC 飛行取像時無法令取像時其外在條件(如取像距離) hengchi U 保持與率定環境一致,於平差過程將造成系統誤差。因此,後續空三平差. 將使用自率光束法克服相機參數率定不完全之問題。 而在地面控制點部分,嘗試引入點特徵航空影像控制資訊建立 UAV 影 像空三平差之地面控制點,探討以點特徵航空影像控制資訊替代地面實測 控制點於 VBS-RTK GPS 輔助 UAV 影像空三平差之可行性,見圖 1-1 白底 黑字處。 最後探討 GPS 輔助 UAV 影像自率光束法空三平差與自率光束法空三 平差之空三平差精度是否相近,並結合不同地面點控制來源,歸納提出 7.
(23) VBS-RTK GPS 輔助 UAV 影像自率光束法空三平差其地面控制點最適配置, 見圖 1-1 綠底黑字處。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 8. i n U. v.
(24) VBS-RTK GPS 地面高速測試 定位成果 率定相機 檢驗定位成果 iWitnessPRO. GPS 接收模組裝設置 UAV UAV 飛行軌跡. 相機參數. 時間內插. No. 學. ‧ 國. 立. 政 治 大像片曝光瞬時坐標 加入 GPS 觀測量. Yes. ‧. GPS 觀測量引入共線式. 使用自率光束法. n. al. er. io. sit. y. Nat No. Ch. 地面實測. engchi. i n U Yes. v. 控制資訊→GCPs No. GPS 輔助光束法. GPS 輔助自率光束法 空三平差 (GCPs: 地面實測). Yes. GPS 輔助自率光束法 空三平差 (GCPs:控制資訊). 自率光束法空三 平差成果分析及比較 圖 1- 1 研究流程圖 9. 控制資訊.
(25) 第二章 文獻回顧 由於本研究所使用之 GPS 定位方式為動態定位,其面臨系統誤差與解 決方式與靜態定位有所不同,第一節首先回顧動態定位過程中易受哪些因 素影響及其定位成果的系統誤差形式。接續於第二小節則歸納高精度動態 定位種類,並回顧其 GPS 動態定位精度是否滿足輔助 UAV 影像光束法空 三平差之需求。 當定位精度滿足光束法平差之需求後,必須了解的是實際描述光束關. 政 治 大. 係應為曝光站的位置,故所解算之 GPS 資料需經歸算,才得以加入空三平. 立. 差。因此第二節將回顧 GPS 定位成果歸算至相機曝光瞬時位置的方式,即. ‧ 國. 學. 空間歸算及時間內插方式。一旦空間歸算、時間內插不完全,將與第一節 回顧之 GPS 動態定位過程所提及誤差形式,而產生隨時間呈線性變化之漂. ‧. 移系統誤差,因此於節中亦回顧過去文獻於空三平差是透過何種數學模式. y. Nat. sit. 解決此系統誤差。. n. al. er. io. 而理論上,當空三平差加入 GPS 觀測量時,雖可免除地面控制點之需. i n U. v. 求。但 GPS 定位與製圖採用坐標基準不同,且因引入線性漂移參數,與一. Ch. engchi. 般光束法空三平差相比,將涵蓋更多未知參數,因此無法免除地面控制點 佈設,因此第三節將回顧 GPS 輔助光束法空三與地面控制點佈設關係之文 獻,藉以了解後續地面控制點佈設之方式。 最後一節則是回顧非量測相機於要求精度之圖資測製應用時需考量哪 些因素,與量測型相機相比又有何缺陷?欲作要求精度之圖資測製應用時 其相機需事先率定,但所得之相機參數與率定環境高度相關,且取像環境 無法與率定環境一致,將透過自率光束法空三平差解決之,並回顧使用自 率光束法其空三平差精度提升之狀況。 10.
(26) 第一節 GPS 動態定位 現今 UAV 為導航之需求,大多安裝以虛擬距離(pseudorange)觀測量解 算單點定位的 GPS 接收儀,以 GPS 虛擬距離觀測量解算其定位精度僅數十 公尺,無法合乎本研究要求。因此,本研究文中所討論之 GPS 定位皆基於 載波相位觀測量之 GPS 動態定位。以載波相位解算待測點坐標時,首先面 臨整數週波未定值求解,須解算正確才可獲得較高精度之定位成果。但 GPS 動態定位係每曆元(epoch)求解一坐標,不同於靜態定位般觀測時間較長而. 政 治 大 數週波未定值求解不正確,導致定位結果呈現線性漂移誤差(drift errors), 立 有較多觀測量,動態定位在定位過程中,一旦發生週波脫落將導致後續整. 其解決方式將於第二節中第三小節回顧。於本節最後則是回顧基於載波相. ‧ 國. 學. 位觀測量高精度之 GPS 動態定位種類,及其定位精度是否滿足 UAV 影像. Nat. er. io. sit. 一、週波脫落與整數週波未定值求解. y. ‧. 空三平差之需求。. 動態 GPS 在解算整數週波未定值過程中易受週波脫落影響,而週波脫. al. n. v i n 落又與訊號中斷時間長短相關,當載波相位觀測量無法在一時間序列內連 Ch engchi U. 續觀測而導致訊號中斷。週波脫落對於整數週波未定值求解而言為粗差, 但由於週波脫落值大小不一,微量週波脫落不易偵測及清除,將使整數週 波未定值求解不正確而影響 GPS 定位成果。因此要求解出正確的整數週波 未定值前,必須將週波脫落作清除,否則將無法求解出正確的移動站軌跡 資訊,於過去文獻中回顧造成整數週波未定值求解不正確的原因可歸納如 下(Ebadi, 1997): (1) 機翼或機身遮蔽 GPS 天線至衛星之間的訊號,所造成訊號中斷。特別 容易發生在切換航帶,載具傾斜轉彎時(Ackermann, 1993)。 11.
(27) (2) 機身所造成多路徑效應(Krabill, 1989)。 (3) 接收儀電力供應不足。 (4) 因太陽黑子活躍使電離層電子含量高或外部訊號高度干擾,造成低訊號 強度,如雷達運作區域,GPS 衛星訊號易被干擾,無法正確定位。 週波脫落偵測相當不易,因週波脫落幅度不定,與訊號失鎖時間長短相關; 又加上動態 GPS 解算為 epoch-by-epoch,不像快速靜態定位、虛擬動態定 位及 RTK 觀測時間可長達數分鐘。因此對於載體持續移動之 GPS 動態定 位而言,每一曆元皆需求解移動站坐標,不易將所有週波脫落偵測並清除,. 政 治 大 因此,對於載波相位為觀測量的差分定位,求解整數週波未定值估值 立. 此時便會影響後續週波未定值之求解。. 將是關鍵,於動態定位求解整數週波未定值估值方法歸納如下:. ‧ 國. 學. (1) 可從虛擬距離觀測量中的 C/A code 或 P code 推算整數週波未定值的估. ‧. 值(Ackermann, 1994)。. y. sit. io. er. 2005)。. Nat. (2) 將 GPS 接收儀移至已知點確定整數週波未定值(Madani and Shkolnikov,. (3) 以 OTF(On-The-Fly) 方 式 快 速 解 算 整 數 週 波 未 定 值 (Hatch, 1990;. n. al. Abidin,1993)。. Ch. engchi. i n U. v. 其中方式(1)採用虛擬距離觀測量推估整數週波未定值之估值,由於採用 C/A 及 P code,因此不如載波相位觀測值精度高;而方式(2)則是要求飛機 起飛前和著地後均進行一段相當長時間的初始化,並且在此段時間內保持 訊號連續,但實際作業中這個條件難以滿足。因此現今大多採用方式(3)快 速求解整數週波未定值,本研究即採此方式。方式(3)為求解整數週波未定 值估值,對於數值較大之週波脫落可予以克服,但仍無法解決微量週波脫 落,因此整數週波未定值的求解仍是動態 GPS 定位中最大的挑戰,不論採 用以上何種方法,GPS 定位成果皆會因整數週波未定值求解不正確而產生 12.
(28) 線性漂移誤差,GPS 線性漂移誤差於 GPS 動態定位仍是無法避免(Friess, 1990)。另一方面 Ackermann(1994)研究則顯示微量整數週波脫落發生之週 期,約莫 15 分鐘,在此週期內將導致 GPS 定位成果隨時間呈線性漂移。. 二、高精度 GPS 動態定位 接續則是回顧高精度 GPS 動態定位種類,為符合要求精度之圖資測製 精度需求,GPS 定位精度必須達數公分等級,才可作為觀測量參與空三平 差,達到控制的效果,進而將地面控制點佈設數量降到最低(Van Der Vent,. 政 治 大 究中,大多採用後處理動態差分定位輔助航拍影像空三平差(Post Processed 立. 1989; Dorrer and Schwiertz,1990; Friess, 1990)。目前於 GPS 輔助空三平差研. Kinematic, PPK)之方式(Ackermann and Schade, 1993; Friess, 1990)。. ‧ 國. 學. 後處理動態差分定位係使用單一基準站作為相對定位的參考點,與移. ‧. 動站進行二次差分解算。當基準站與移動站距離短時,二次差分能夠消除. y. Nat. 對流層以及電離層等影響;一旦基線長度增加,基準站與移動站大氣條件. er. io. sit. 不一致,則造成部分誤差無法被有效消除,導致長基線定位精度下降。因 此採用以載波相位觀測量所進行的後處理動態差分定位將會造成兩個限制。. al. n. v i n 第一,定位精度為符合數公分等級,僅可使用能接收雙頻載波相位觀測量 Ch engchi U. 的接收儀,此外基準站至移動站之間的基線長度不能大於 30 公里(Bruton et al., 2001; Cramer, 1997)。第二,在取像過程中,基準站必須置放於製圖區 內,且須增派人員負責架設地面基準站,再於室內以後處理方式獲得數公 分等級的差分定位成果。 隨著 GPS 定位技術發展,精密單點定位(Precise Point Positioning, PPP) 及 VBS-RTK GPS 技術出現,此兩種定位方式僅需一台接收儀皆可滿足高 精度定位需求,而廣泛應用於圖根測量及船體定位。近期將精密單點定位 技術應用於輔助空三平差之研究較少,陳國華等人(2009)於國內係使用精密 13.
(29) 單點定位輔助航測製圖之研究,但分析時僅將 GPS 軌跡與傳統空三平差解 算外方位參數中位置參數相互比對。而國外研究則是以精密單點定位輔助 傳統大型載具搭配量測型相機之空三平差,其空三平差精度可符合 1/5000 製圖需求(Yuan et al., 2009)。但精密單點定位必須使用衛星的精密星曆和時 鐘差,而這些資料無法即時獲得,大約有兩星期左右的時間延遲,使用不 同等級的 IGS(International GNSS Service)精密星曆與不同時間間隔的 GPS 資料將對精密單點定位點位坐標有所影響(林老生,2009)。 而另一方式 VBS-RTK GPS 定位技術的優勢在於不需自行架設主站,. 政 治 大 可獲得高精度定位成果。雖國土測繪中心已可提供 VBS-RTK 定位服務且 立. 且移動站在可接收雙頻載波相位觀測資料與具備無線上網功能前提下,即. 發展成熟,但不論國內外於 VBS-RTK GPS 之研究大多針對控制測量或圖. ‧ 國. 學. 根測量等,移動站為靜態使用。其研究結果顯示,使用 VBS-RTK GPS 施. ‧. 測成果均能符合圖根點測量點位精度要求(林文亮,2007; 鄭至哲,2012)。. y. Nat. 尚無將 VBS-RTK GPS 應用於空三平差或是高速動態移動下定位精度分析,. er. io. sit. 但理論上可透過無線上網連結 VBS-RTK GPS 服務在 UAV 取像時以即時、 方便且高精度地獲得數公分等級的定位成果;即便無法克服硬體設備,如. al. n. v i n 無線上網以及無線電硬體連接,也可選擇後處理解算獲得 UAV 精確飛行軌 Ch engchi U 跡資訊。. 14.
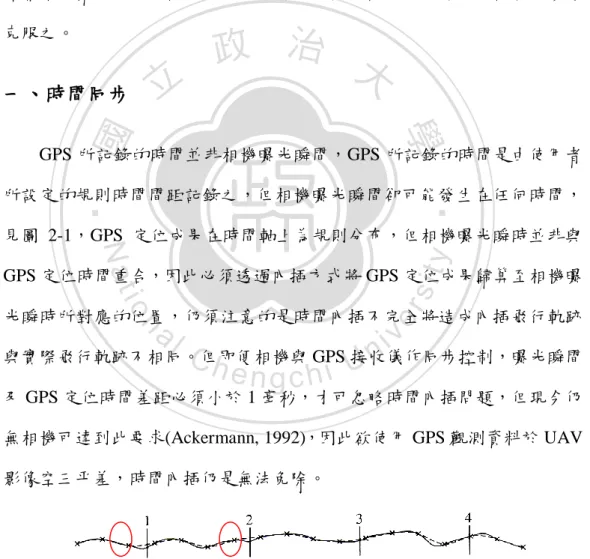
(30) 第二節 GPS 動態定位成果歸算 GPS 輔助空三平差之概念興起,理想上係期望 GPS 定位成果等同曝光 瞬間相機投影中心。但在空間上,GPS 天線中心位置不可能與相機投影中 心位置重合,加上 GPS 定位時間並非相機曝光瞬間。因此,即使擁有精確 GPS 定位成果,仍需歸算至相機曝光瞬間位置才得以代入空三平差。因此 本節將回顧時間內插與 GPS 天線至相機投影中心偏移量量測方式,爾後回 顧當空間歸算與時間內插不完全所造成的系統誤差,將透過線性漂移參數 克服之。. 立. 一、時間同步. 政 治 大. ‧ 國. 學. GPS 所記錄的時間並非相機曝光瞬間,GPS 所記錄的時間是由使用者. ‧. 所設定的規則時間間距記錄之,但相機曝光瞬間卻可能發生在任何時間,. y. Nat. 見圖 2-1,GPS 定位成果在時間軸上為規則分布,但相機曝光瞬時並非與. er. io. sit. GPS 定位時間重合,因此必須透過內插方式將 GPS 定位成果歸算至相機曝 光瞬時所對應的位置,仍須注意的是時間內插不完全將造成內插飛行軌跡. al. n. v i n 與實際飛行軌跡不相同。但即便相機與 GPS 接收儀作同步控制,曝光瞬間 Ch engchi U. 及 GPS 定位時間差距必須小於 1 毫秒,才可忽略時間內插問題,但現今仍 無相機可達到此要求(Ackermann, 1992),因此欲使用 GPS 觀測資料於 UAV 影像空三平差,時間內插仍是無法免除。. 圖 2- 1 以時間內插求相機曝光時 GPS 定位之示意圖(Wolf and Dewitt, 2000) 15.
(31) 過去研究於時間內插處理方式有二,第一種因 GPS 所記錄的時間精度 較高,可在相機曝光瞬時將訊號傳至 GPS 接收儀,因此以 GPS 接收儀記錄 相機曝光瞬間時間,後續便可藉由 GPS 接收模組所記錄的相機曝光瞬間時 間以及 GPS 定位所記錄的規則時間作線性內插。另一方式則是透過 GPS 接 收儀傳送精確 PPS(Pulse-Per-Second)訊號,以此訊號觸發相機拍攝影像,使 影像拍攝曝光時與規畫設計時相近,降低延遲量,本研究雖採用此方式降 低時間延遲,但由於時間差距仍大於 1 毫秒,因此仍無法免除時間內插程 序。. 政 治 大 Ackermann(1992)研究,當飛機時速為 200 公里,飛機上裝載 GPS 雙頻接收 立. 此 外 , 由 於 載 具 移 動 速 度較 快 , GPS 接收速 率 不 能 過 低 , 根 據. 器見圖 2-2,一秒就可移動約 55 公尺,因此 GPS 定位頻率應小於 1 秒,為. ‧ 國. 學. 了讓實際飛行軌跡與線性內插軌跡兩者差異小於 10 公分。至少每秒要接收. ‧. 2 筆以上的訊號,於後差分處理及時間內插時,才可內插出較相似相機拍攝. n. al. er. io. sit. y. Nat. 瞬時的三維坐標。. Ch. engchi. i n U. v. 圖 2- 2 動態差分定位示意圖 而時間內插方式,常見的且較有效率之內插方式為線性內插 (Ackermann, 1992; Blankenberg, 1992; Ebadi, 1997; Friess, 1988),其他如多項 式(Lucas et. al., 1987)、拉格朗日(Friess, 1992)在過去文獻也曾使用過,但因 16.
(32) 多項式與拉格朗日內插方式未有文獻提及使用其內插方式應搭配之 GPS 接 收頻率,僅 Ackermann 於研究中使用線性內插時探討其接收頻率應達2 Hz, 因此本研究將採用多數研究所使用之線性內插方式。 但即使採用高頻率記錄 GPS 定位軌跡,並透過時間內插以及空間歸算 將 GPS 定位成果歸算至相機曝光瞬間位置,其內插所得位置仍非等同於實 際曝光站曝光瞬間位置,見前圖圖 2-1,於平差過程中仍會造成系統誤差, 第三小節中將回顧各文獻如何補償此系統誤差。. 二、GPS 天線至相機投影中心偏移量. 政 治 大 由於 GPS 必須安置於透空度良好的位置才能正確定位,因此 GPS 天線 立. 一般都安裝在機背上,而相機則是安裝在機身底下,兩者位置無法重合一. ‧ 國. 學. 致(Lucas, 1987),而 UAV 亦相同(見圖 2-3)。GPS 接收儀所記錄的位置為. ‧. GPS 天線相位中心,但參與空三平差為相機投影中心三維坐標,兩者之間. sit. y. Nat. 存在一空間偏移向量,稱為 GPS 天線至相機投影中心偏移量(antenna-camera. io. er. offset)。當應用層面為要求精度之圖資測製時,必需將此偏移量求解出來, 才可將 GPS 定位成果歸算至相機投影中心。若天線剛好位於相機光軸上,. al. n. v i n 此時偏移量僅包含垂直位移量;若不是,則必需量測出天線相位中心至相 Ch engchi U 機投影中心之間的空間向量,且量測精度需達公分級(Ebadi, 1997)。. 圖 2- 3 相機投影中心與 GPS 天線間偏移量示意圖 於傳統大型載具,可透過地面測量方式求得 GPS 天線至相機投影中心 17.
(33) 偏移量。此係利用相機廠商所提供框標率定值作為已知資訊,將這些框標 設為已知點,利用自由測站法交會求得 GPS 天線位置,所得將其視為 GPS 天線至相機投影中心偏移量(王宏仁,1996),再透過與地面坐標系之間旋轉 矩陣,將此偏移量轉換至物空間坐標系。但對於 UAV,所酬載的相機為非 量測型相機,感光元件體積相當小僅數毫米且無法拆卸,導致此偏移量無 法以地面測量方式量測,因此與過去傳統大型載具 GPS 輔助空三平差相比, 本研究需克服 GPS 天線至相機投影中心無法量測之問題。. 三、線性漂移誤差(drift error). 政 治 大 如本章第一節所述,在航帶切換時,因機翼遮蔽 GPS 訊號而造成週波 立. 脫落,便會在 GPS 定位過程中產生誤差。並且基於載波相位觀測量的動態. ‧ 國. 學. GPS 定位,即便在時間不長的航攝任務,仍會產生隨時間呈線性變化的系. ‧. 統誤差,稱為漂移系統誤差(Ackermann, 1991; Friess and Heuchel, 1992)。除. y. Nat. 此之外,在基線距離拉遠(>100 公里)或拍攝時間變長(>5 小時)後,即便使. er. io. 之系統誤差。. sit. 用差分定位技術,仍無法完全消除大氣折光差、衛星軌道誤差等未模式化. al. n. v i n 因此過去文獻將上述大氣折光差、衛星軌道誤差、整數週波未定值等 Ch engchi U. 未模式化之系統誤差以線性漂移參數模式化,並以附加參數形式加入空三 平差中處理,使 GPS 定位時整週波未定值只需近似而不需要太精確,即便 在飛行過程中也允許有 GPS 訊號失鎖情況發生。由於隨時間變化之漂移系 統誤差其週期約 15 分鐘,約莫等同一條航帶取像所需時間及衛星幾何分布 改變時間週期。因此,線性漂移參數將誤差以每條航帶以六參數方式模式 化,用以消除大氣折光差、衛星軌道誤差及週波脫落導致整數週波未定值 不精確所帶來的系統誤差(Ackermann and Schade, 1993)。 而若未消除本章第二節所提及 GPS 定位成果因其空間無法歸算及時間 18.
(34) 內插不完全所造成之系統誤差,於空三平差將影響 UAV 影像空三平差精度。 過去文獻提及線性漂移參數除了可解決上述所提及之大氣折光差、衛星軌 道誤差、整數週波未定值不精確及時間內插不完全之問題,甚至可克服 GPS 天線至相機投影中心偏移量量測不精確所造成的系統誤差(Blankenberg, 1992)。而 ORIMA 空三平差軟體作者 Hinsken 則是透過線性漂移參數中的 常數項補償 GPS 天線至相機投影中心空間偏移量未量測,即便此偏移量未 知,亦可透過線性漂移參數將此偏移量所引起的系統誤差影響降到最低 (Hinsken et al., 2002)。. 政 治 大 1984)坐標系統 下,與製圖所採用的國家區域性坐標不同,如 TWD97 立. 另外,GPS 定位之三維坐標是建立在 WGS84(World Geodetic System. (TaiWan Datum 1997);加上 GPS 採用高程基準為橢球高,圖資測製需. ‧ 國. 學. 要高程基準則是由國家建立之正高坐標系,如 TWVD2001(TaiWan Vertical. ‧. Datum 2001)。兩者之間有基準不同的問題,雖可透過少數控制點作坐標轉. sit. y. Nat. 換(於下節提及),坐標轉換所引起之系統誤差也可藉線性漂移參數予以克服. io. n. al. er. (Dorrer and Schwiertz, 1988)。. Ch. engchi. 19. i n U. v.
(35) 第三節 GPS 輔助光束法平差與地面控制點之關係 傳統空三平差為求高精度之成果,必須在測區周圍及測區內部佈設大 量控制點。佈設這些控制點必須花費許多人力、金錢與時間,當測區位於 測量不易進行的區域,需花費更多金錢與時間。以往類比航空攝影測量時 期,就中、大比例尺製圖而言,佈設地面控制點的費用必須耗費製圖總成 本 38%至 45% (Kinkyside, 1988)。即便 GPS 技術使地面控制測量更加便利 快速,於李莉華及趙鍵哲(2003)研究指出,常規航測外業佈點、測量工作仍. 政 治 大 因此,以 GPS 觀測量作為大量空中控制點來輔助空三平差,將可取代 立. 需耗費約莫 15%至 20%製圖成本。. 地面控制點,理想上可完全免除地面控制點之需求,節省傳統航測佈設地. ‧ 國. 學. 面控制點的時間與成本,進而提升航測的效率。並且過去研究透過空三平. ‧. 差後之協方差矩陣發現,引入 GPS 觀測量後,平差系統中像點坐標觀測值. y. Nat. 的可靠性一般不低於甚至高於一般光束法空三平差的可靠性,平差結果顯. er. io. sit. 示測區內精度分布趨於一致,而非與測區大小高相關,因此 GPS 輔助光束 法平差往往具有較佳之可靠性,且明顯優於傳統航空攝影測量的光束法空. al. n. v i n 三平差(李德仁、單杰,1989; C h Ackermann andUSchade, 1993)。 engchi. 一般商用 UAV 因酬載能力有限,無法酬載高精度 IMU,因此一般商. 用 UAV 僅能在空三平差引入高精度 GPS 定位軌跡資訊。如 Chiang 等人 (2012)使用基於單頻載波相位之後處理動態差分定位成果於 UAV 直接地理 定位時,於 600 公尺之航高測試下其 X 與 Y 方向精度約 20 公尺,而高程 精度約 30 公尺,應用層面僅限於災難監測而非圖資測製應用。換句話說, UAV 欲使用 GPS 觀測量於製圖應用,空三平差程序仍是無法免除。 因此,欲以 GPS 輔助空三平差於要求精度之圖資測製應用時,除了考 慮前節所提及 GPS 動態定位誤差來源與定位成果歸算之問題外,仍有坐標 20.
(36) 基準不一致之情況,即 GPS 定位成果與圖資測製的坐標基準不同。GPS 定 位成果建立於 WGS84 坐標系統,而製圖所要求的坐標系統大多為國家所採 用的投影坐標系統,如 TM2 ° (Transverse Mercator 2 degree Projection System)。即便可透過數學模式轉換兩者,但兩者高程坐標不同,GPS 採用 高程基準為橢球高系統,製圖採用高程基準則為國家所建立之正高系統。 因此,必須作坐標轉換才能將 GPS 定位成果轉換至製圖所採用之坐標 系統,為解決此問題,空三平差時須引入少數的地面控制點。一般就 GPS 輔助空三平差而言,在測區四角落佈設全控點已經足夠供轉換之用。但上. 政 治 大 控制點不足將造成航帶間幾何不足,導致奇異解,求解過程易不穩。因此, 立 節所提及於每條航帶加入線性漂移參數,將使方程式涵蓋更多未知數,若. Ackermann(1994)提出加入高程控制鏈或正交航帶方式以加強幾何條件,解. ‧ 國. 學. 決奇異解問題,本研究將修改其配置方式,詳細佈設方式於下章研究方法. ‧. 介紹。. y. Nat. 另一方面,地面控制點佈設數量必須與圖資測製要求之精度相互配合,. er. io. sit. 如無地面控制的 GPS 輔助光束法空三平差亦可滿足高山區中小比例尺製圖 或是圖資更新、資源調查等所需之精度(袁修孝,1999)。但製圖精度要求越. al. n. v i n 高,待考慮誤差來源越多。若欲使用 GPS 觀測量於大比例尺製圖,必須作 Ch engchi U. 時間內插及扣除 GPS 天線至相機投影中心偏移量後,其空間歸算及時間內 插後其相機曝光瞬間三維位置精度須達 50 公分(Ebadi, 1997)。Ackermann 及 Schade(1993)的研究發現若 GPS 歸算至相機後精度惡化,將會導致整個 平差結果惡化,若要達到大比例尺製圖精度需求,仍須仰賴大量地面控制 點,若非應用於大比例尺製圖,則製圖精度與 GPS 歸算至相機後之精度不 具高相關性。在要求精度之圖資測製需求下,如何降低、消除 GPS 定位過 程所造成之系統誤差,抑或時間內插、GPS 天線至相機投影中心偏移量量 測、大氣折光差以及整數週波未定值的正確與否就相當重要了 (Ebadi, 21.
(37) 1997)。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 22. i n U. v.
(38) 第四節 非量測相機 本節接續回顧非量測相機應用於攝影測量之相關文獻,雖然非量測型 相機,取得容易、體積小、重量輕、可手持,並且價格低廉,但相機製作 時並不如量測型相機嚴謹,因此具有以下缺點(修改自黃成偉,2002): (1) 無框標 過去傳統載具因酬載量測型相機,欲求得 GPS 天線至相機投影中心偏 移量,其方式係以地面測量測得相機投影中心。而相機投影中心則由框. 政 治 大 相差僅數毫米,因此可概略測得 GPS 天線至相機投影中心偏移量且達 立. 標連線交會,交會所得之點位雖不等同理論上之相機投影中心,但兩者. 數公分等級,但非量測相機無框標,將造成 GPS 天線至相機投影中心. ‧ 國. 學. 偏移量無法量測之問題。. ‧. (2) 內方位元素不穩定。. y. Nat. (3) 透鏡畸變差大且不規則(Fraser, 1982;Fryer and Brown, 1986)。. er. io. sit. (4) 底片不平坦. 傳統類比相機係使用底片取像,而數值相機則是透過感光元件,傳統底. al. n. v i n 片存有不平坦情形,而於 C h Fraser(1997)文獻提及數值相機率定時亦有感 engchi U 光元件不平整之情形。. 因此在空三平差前,必須對相機率定。一般率定時普遍以近景攝影測量方 式率定,且對焦至無窮遠後固定焦距,如此一來則必須將率定場地移至戶 外,並將率定標放大,於軟體率定時才足以辨識率定影像中之率定標,獲 得相機參數。但必須瞭解的代入共線式中係率定所得相機參數,其中焦距 為率定當時拍照的像主距,即相機透鏡之後節點沿著攝影光軸到像平面之 距離。根據透鏡成像公式,焦距固定,拍攝時對焦至無窮遠後固定焦距, 其像主距應等同於焦距。但 Lin and Chio(2012)研究中,即使對焦至無窮遠 23.
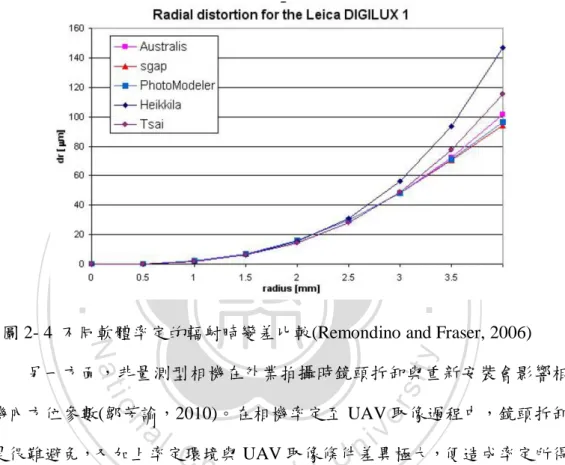
(39) 後固定焦距,率定成果會依率定物距而改變,也就是說率定成果與率定環 境高相關,一旦航拍取像時航高無法與率定物距保持一致時,將造成率定 所得相機參數無法描述於航拍時之相機。加上不同軟體所採用的率定標及 拍攝流程皆有所不同,其率定標的標點分佈情況,將使率定結果有較大差 異,如圖 2-4。. 立. 政 治 大. ‧. ‧ 國. 學 y. Nat. 圖 2- 4 不同軟體率定的輻射畸變差比較(Remondino and Fraser, 2006). er. io. sit. 另一方面,非量測型相機在外業拍攝時鏡頭拆卸與重新安裝會影響相 機內方位參數(鄒芳諭,2010)。在相機率定至 UAV 取像過程中,鏡頭拆卸. al. n. v i n 是很難避免,又加上率定環境與 C h UAV 取像條件差異極大,便造成率定所得 engchi U 相機參數不適用於描述航拍時相機之狀態,若於空三平差過程使用該組相. 機參數將造成系統誤差。甚至在取像過程中,光線因相機透鏡而折射及大 氣條件的影響,使其行進方向偏離直線,導致像空間的變形。若欲維持共 線條件式成立,須了解相機的系統誤差特性,將此系統誤差降至最低,以 提高攝影測量成果的精度(何維信,1988)。因此,使用率定所得之相機參數 於 UAV 航拍影像空三平差,可採下列方式克服(李德仁、袁修孝,2002): (1) 檢定場率定法 利用真實取像環境下的檢定場率定,獲得系統誤差之參數值。保證取像 24.
(40) 條件一致,如相機參數、大氣條件。此方式雖可較準確獲得系統誤差之 參數值,缺點但必須要週期性進行率定,且須將檢定場佈設於測區內。 (2) 自抵銷法 航拍時於同一測區飛行不同方向之正交航帶(及四次重疊測區),並將此 四組數據同時平差,儘管每組數據內部像片系統誤差變化類似,但各組 數據之間系統變形呈隨機性。因此,四組數據同時平差即可自行抵消或 降低像點之系統誤差。缺點是攝影測量工作量成倍數增加,若測區為小 面積高精度要求下,才建議使用此方式。. 政 治 大 利用附加參數形式,由一組參數組成系統誤差模型,將這些附加參數以 立. (3) 自率光束法. 及像主距、像主點坐標視為未知數或視為帶權觀測量,與外方位參數一. ‧ 國. 學. 併求解,於平差過程中自率並消除系統誤差之影響。優點是不需要增加. ‧. 任何工作,如增加取像或建置率定場。但附加自率參數模式的選擇需仰. io. er. 迭代過程中常導致求解不穩定情況發生。. sit. y. Nat. 賴經驗,選擇不同則平差結果不同,因未知參數間存有高相關情形,在. 基於目前像點量測可自動化且能大量取得連結點,加上影像前後重疊. al. n. v i n 率可達 80%而左右重疊率可達 C h 30%以上,因此本研究於空三平差時採自率 engchi U. 光束法克服。較早提出自率光束法概念為 Ebner (1976)與 Grün (1978),以 附加參數克服相機參數不精確所造成系統誤差,如底片不平坦、未模式化 透鏡畸變差、以及光線折射的情況。而 Brown (1976)所提出附加參數,模 式中參數則是描述相機實際幾何變化,如輻射、離心畸變差、底片變形及 底片不平坦。自率光束法空三平差於求解過程中,除了外方位參數以及連 結點物空間坐標為未知數以外,亦會將自率的附加參數以及像主距、像主 點坐標也視為未知數納入平差中解算。但因外方位參數與自率的附加參數 高相關,導致求解所得之外方位參數與實際曝光位置不符,因平差過程中 25.
(41) 為使觀測殘差最小,將以控制點約制光束,因此未改正之系統誤差將由外 方位參數吸收之。 自率光束法空三平差對於要求精度的圖資測製應用能有效的補償不精 確相機參數引起的系統誤差,即便給定相機參數不精確也可透過自率參數 項補償,故自率光束法是一種可以抵抗像點系統誤差的方式。但一般光束 法平差,即便焦距差距僅毫米,但焦距與 Z0 為 100%相關,在平差解算後, Z 方向乘上比例尺將造成公尺級的變化,在水平方向 X0 與 Y0 主要與像主 點偏移量高相關,因此像主點微量偏移將造成 X0 與 Y0 參數公分級變化。. 政 治 大 與 y 方向差 10 μm 與 -5 μm,卻造成曝光站在(X ,Y ,Z )方向差異為(10 cm, 5 立 Cramer 等人(2000)研究中,圖比例尺 1:13000,焦距差異 7 mm,像主點在 x 0. 0. 0. cm, 9 m)。因此,於 UAV 影像空三平差應用,使用自率光束法便可補償率. ‧ 國. 學. 定不完全之相機參數,提高非量測相機於 UAV 航拍中的可用性(謝幸宜,. ‧. io. sit. y. Nat. n. al. er. 2011)。. Ch. engchi. 26. i n U. v.
(42) 第三章 理論基礎和研究方法 研究欲使用 GPS 觀測量作空中控制之用,定位精度必須達公分級,於 本研究中 GPS 定位方式擬採 VBS-RTK GPS,雖研究中空三平差實驗階段 因尚未克服硬體問題,仍採用後處理解算 UAV 飛行軌跡,但其演算法及解 算方式仍與即時定位方式相同,並非傳統 GPS 輔助光束法空三平差所採用 之後處理動態差分定位(Post Process Kinematic, PPK)演算法,因此於第一節 先介紹虛擬基準站即時動態定位理論基礎、解算流程以及介紹以虛擬基準. 政 治 大. 站即時動態定位建立之全國性定位服務─ e-GPS(國土測繪中心,2007)。. 立. 而後欲引入 GPS 定位成果至空三平差程序,則必須了解空三平差其理. ‧ 國. 學. 論基礎。因此於第二節將介紹一般光束法空三平差中共線式、光束法空三 平差及其優缺點。再者,必須考慮 UAV 所酬載之感測器為非量測相機,航. ‧. 拍前需經相機率定,使用率定數學模式及率定流程將在第二節中第二小節. y. Nat. sit. 介紹。又因率定環境與取像環境不同,造成相機參數無法完全描述航拍時. n. al. er. io. 之相機,於一般光束法空三平差中將造成像點系統誤差之問題,第三小節. i n U. v. 則介紹為克服此問題採用自率光束法空三平差原理及數學模式。. Ch. engchi. 而後第三節則是探討 GPS 觀測量引入 UAV 影像自率光束法空三平差 遭遇之問題,首先為 GPS 天線至相機投影中心之間偏移量於 UAV 無法量 測。而另一方面定位過程、時間內插後仍存有系統誤差,欲使用 GPS 定位 成果,上述提及之系統誤差將伴隨之,因此第三節第二小節將介紹克服 GPS 系統誤差之線性漂移參數模式,第三小節則說明研究中地面控制點配置方 式。. 27.
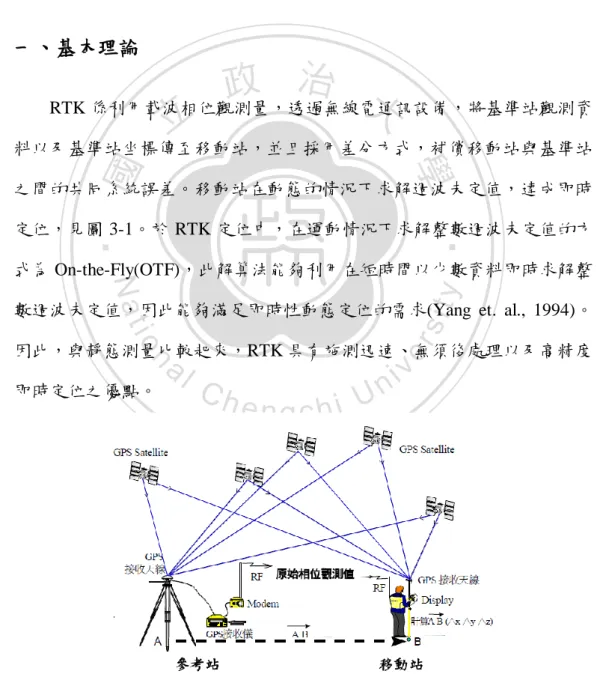
(43) 第一節 虛擬基準站即時動態定位 GPS 理論中,觀測量之類型、衛星介紹、差分解算方式因 GPS 相關技 術及理論大都已成熟完善,將不詳加描述。由於 VBS-RTK GPS 為 RTK 發 展而出,因此本節將先簡述 RTK 定位方式以及說明虛擬基準站即時動態定 位理論原理及解算流程,最後介紹服務區涵蓋全國之 e-GPS 即時動態系統 服務(國土測繪中心,2007)。. 一、基本理論. 政 治 大 RTK 係利用載波相位觀測量,透過無線電通訊設備,將基準站觀測資 立. 料以及基準站坐標傳至移動站,並且採用差分方式,補償移動站與基準站. ‧ 國. 學. 之間的共同系統誤差。移動站在動態的情況下求解週波未定值,達成即時. ‧. 定位,見圖 3-1。於 RTK 定位中,在運動情況下求解整數週波未定值的方. y. Nat. 式為 On-the-Fly(OTF),此解算法能夠利用在短時間以少數資料即時求解整. er. io. sit. 數週波未定值,因此能夠滿足即時性動態定位的需求(Yang et. al., 1994)。 因此,與靜態測量比較起來,RTK 具有施測迅速、無須後處理以及高精度. n. al. 即時定位之優點。. Ch. engchi. i n U. v. 圖 3- 1 單主站 RTK 定位原理示意圖(詹君正,2007) 28.
(44) 但由於 RTK 解算係利用差分定位方式,當兩站距離越近越能消除基準 站與移動站之間的共同誤差,如衛星鐘差、接收儀鐘差等。其整數週波未 定值解算時間也會越短,定位的精度越高。但隨著基準站與移動站之間的 距離增加時,因電離層、對流層、衛星分布幾何不同,甚至是週波脫落等 因素影響,而降低定位精度,因此 RTK 僅在短距離時可獲得良好定位精度, 在中、長距離上,無法獲得與短基線定位時之同等精度(楊銘仁,2005)。 而 VBS-RTK GPS 則是為了克服 RTK 定位缺陷所發展而出,VBS-RTK GPS 原理的基本觀念可解釋為多個 GPS 基準站於 24 小時內每秒連續接收. 政 治 大 算控制中心彙整所有基準站所接收的資料,並產生區域改正參數,計算出 立. 衛星觀測資料,並透過網路或其他通訊設備與計算及控制中心連接,由計. 任一曆元移動站附近的虛擬基準站的模擬觀測資料。在多基準站所涵蓋的. ‧ 國. 學. 區域中,使用者只需架設移動站,將接收儀所得的觀測資料透過網路依. ‧. NMEA( National Marine Electronics Association)格式傳回控制計算中心。. y. Nat. VBS-RTK GPS 中虛擬基準站,並非真實存在,虛擬基準站觀測量之產生是. er. io. sit. 整合區域內基準站的資料並對各種距離相關的系統誤差如電離層、對流層 及軌道誤差進行模式化,再以內插的方式計算出虛擬主站位置上的系統誤. al. n. v i n 差量,並利用最鄰近基準站真實的觀測數據經過轉換得到虛擬基準站的虛 Ch engchi U 擬觀測量(Vollath et al., 2000; Wanninger, 2002)。接續與移動站的觀測數據. 進行單一時刻短基線即時定位計算。VBS-RTK GPS 解算流程可歸納為四大 步驟,見圖 3-2,如下(詹君正,2007): (1) 基準站區域網資料前級處理: 基準站觀測資料庫建立及基準站網形平差。 (2) 基準站區域網解算: 控制及計算中心彙整各基準站連續觀測資料以及精確坐標,以卡爾曼濾 波估計基準站間二次差分週波未定值及建立區域誤差修正資料庫。 29.
(45) (3) 建立虛擬基準站觀測數據: 由控制及計算中心依據移動站單點定位坐標,接續透過區域誤差修正資 料庫內插出虛擬基準站位置上的系統誤差改正量,並結合最近的基準站 實際觀測資料產生虛擬基準站之觀測量後,以國際海運系統無線電技術 委員會(Radio Technical Commission for Maritime, RTCM)格式回傳至移 動站。 (4) 移動站坐標解算: 移動站接收儀以超短基線 RTK 定位解算單一時刻動態定位。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 30. i n U. v.
(46) 基準站觀測資料庫. (1) 基準站區域網 資料前級處理. 各基準站單一 時刻觀測資料. 基準站網形平差. 讀入各基準站 單一時刻觀測資料 讀入各基準站坐標 求解各基準站間 整數週波未定值. (2) 基準站區域網 解算. y. Nat. n. al. i n U. 利用主基準站觀測量 產生 VBS 虛擬觀測量. Ch. engchi. sit. 計算幾何距離及各項 應處理之誤差. er. io 之解算. ‧. 求解內插參數及 主基準站至 VBS 之系統誤差改正量. (3) 建立虛擬基準 站觀測數據. (4) 移動站坐標. 學. ‧ 國. 立. 政 治 大. 求解各基準站間 二次差分系統誤差. v. 單一時刻短基線 動態定位 解算移動站坐標 圖 3- 2 VBS-RTK GPS 演算流程圖. (圖片來源:國土測繪中心 http://www.egps.nlsc.gov.tw/ ) 國土測繪中心所提供 e-GPS 服務即是以 VBS-RTK GPS 技術建立,依 坐標取得之時效性分為即時處理及後處理,兩種處理方式各有其優缺點, 31.
(47) 可供使用者抉擇。即時處理,使用者僅需了解如何操作儀器及連結 e-GPS 服務,即可獲得高頻率三維定位資訊。再取得 e-GPS 定位成果後,使用者 必須依國土測繪中心所建議篩選定位資料,其建議係檢視每曆元 GPS 接收 衛星顆數需達五顆以上,整數週波未定值才可初始化至 FIX 解,確定整數 週波未定值後才可獲得高精度定位成果。使用即時處理其缺點係必須克服 硬體問題,GPS 接收儀需可透過無線上網設備連接國土測繪中心 e-GPS 服 務。而後處理則是當 GPS 接收儀尚無連結無線上網設備時,可至室內透過 解算軟體了解衛星觀測狀況,如衛星分布狀況,同樣可以 VBS-RTK GPS. 政 治 大 記錄速率為 1 秒,即便移動站定位頻率再高,僅可獲得定位成果 1 秒 1 筆 立 解算方式獲得三維定位成果,缺點在於國土測繪中心分布至各地基準站,. 三維定位成果。而本研究先於地面測試研究所使用 GPS 模組,是否可即時. ‧ 國. 學. 以 VBS-RTK GPS 正確定位,分析其定位精度是否滿足空三平差精度需求;. ‧. 而在空三平差實驗階段,因尚未克服硬體無線電通訊,仍採用後處理. y. Nat. VBS-RTK GPS 輔助 UAV 影像空三平差。. er. io. sit. 由於區域內的虛擬基準站的虛擬觀測量是藉由多基準站及移動站觀測 量產生,因此虛擬基準站之觀測量與移動站觀測量的系統誤差具有高相關. al. n. v i n 性,經差分處理後,可將系統誤差大量地消除,即使在基線長度增加下, Ch engchi U. 也可獲得公分級的精度(詹君正,2007; 鄧雅群,2006; Hu et al, 2002)。在同 等精度之下,採用 VBS-RTK GPS 與 RTK 在達同等精度情況下,所需架設 GPS 基準站數量有所不同,見圖 3-3,VBS-RTK GPS 於基準站只需架設於 服務區周圍,而 RTK 則需均勻分布於服務區內。因此,歸納 VBS-RTK GPS 定位優勢如下(國土測繪中心,2006): (1) 可擴大有效作業範圍,提高定位精度及可靠度。 (2) 測量誤差及初始化時間不因距離增長而增加。 (3) 使用者無須架設區域性主站。 32.
數據

+7

相關文件
In this thesis, a concentric binary phase zone plate was used to re-shape the sharp Gaussian filed profile into an 1-D sinc(x) (or 2-D Bessinc(r)) complex field profile
The educational resources of each student at Chiayi City Schools are more than that of Chiayi County Schools because the size of class at most of Chiayi City Schools is
本研究探討空氣流量及轉爐石量對於 Chlorella sp.生長之表面物 化特及釋出有機物性質影響,可透過傅立葉轉換紅外線光譜(Fourier transform
本研究旨在使用 TI-Nspire CAS 計算機之輔助教學模式,融入基礎 統計學的應用,及研究如何使用 TI-Nspire CAS
本研究於 2017 年 4 月以市面上瓶裝水的品牌隨機抽取國內外各五種品 牌作為研究對象,並利用環檢所公告之採樣方法檢測,收集的樣本以兩種
The main purpose of this research is to compare how a traditional narrative teaching method and a GeoGebra-based computer-assisted instructional method affect
本研究計畫之目的是要以 MPEG-7 之 ART
本研究以 CCR 模式的投入導向模式進行差額變數分析 ,針 對相對無效率之
