小型無人定翼機空拍路徑選擇評估之研究
82
0
0
全文
(2) i.
(3) 誌謝 無可諱言,會再進入學校就讀,完全是因為我的指導教授蕭漢威老師。這緣 分要從二十年前說起,那時的我,正在修習大學課業與追尋自我興趣之中擺盪著, 加入 CDPA 這個管理宿網的學生組織,是一個重要的里程碑,自此我開始在大學 生活中偏重於追尋自我興趣,而當時擔任 CDPA 指導老師的蕭老師,其堅持做對 的事以及對組織成員的支持與鼓勵,成了我在自我追尋過程中的重要安定力量, 雖然沒能完成大學學業,但著實學到了許多。在台北工作了十年以後,覺得自己 在各方面都有點被榨乾了,開始萌生了來找蕭老師學習新事物並過過學生生活的 念頭,於是在 2012 年,承蒙系上老師給予機會,進入資管系就讀。 能順利完成研究所的課業,首先要感謝系上所有老師在課程與知識上的傳授, 尤其是簡報方面的訓練,對這部分著墨極少的我,真是受益良多。來到高大資管, 我感受到不同於大學時期的親和感,系上老師都有顆年輕的心,是個小而美的溫 暖家庭。再者,沒有碩專班同學們上課時的相互激勵、課業討論與協助,我想我 無法完成所有課程,要感謝碩專 101 的同學們:霖芩、文娟、淑萍、欣叡、嘉賢、 家任、智勇、智禹與仕展。 能完成這篇論文,要特別感謝蕭漢威老師,由於我在文字寫作上的心理障礙, 寫作的速度相當緩慢,感謝老師的耐心指導與鼓勵,我才終於能在第四年完成。 也要感謝口試委員—陳灯能老師與楊新章老師,撥空閱讀我的論文並提出寶貴的 建議,讓本篇論文更加完備。另外,要感謝同為蕭門的方宅,有你幫忙進行無人 定翼機的起飛、降落與危機處理,本研究的實驗飛行才得以完成。 在高大待了四年,很高興能不悖初衷,學了許多對我而言的新事物,也與同 門師兄弟與 Lab211 的成員相處愉快,感謝小芋、八五、嘉葳、高手、又加、至哲、 佳君、詠芳與欣穎在眾多事務上的協助。最後要感謝父母親的支持,媽媽的家常 菜是異鄉遊子的最愛,回台南的這幾年,能嘗到家鄉味真是幸福,也辛苦媽媽了。 口試的前一個禮拜,我把紙本論文印了出來,再看了一次,突然間,第一次 覺得自己可以畢業了,終於依指導教授與自己的要求完成了論文,雖然寫作過程 頗為痛苦,但總算給自己一個交代了,也不負蕭老師的指導。看著校園裡盛開的 鳳凰花,完成了大學時代沒能完成的事,也很高興能實現蕭老師多年前與我的約 定,未來,我想我會更堅定地「慢」步前進、快樂生活。 林嘉宏 謹誌于 國立高雄大學 資料工程與網路管理實驗室 2016 年 初夏 ii.
(4) 小型無人定翼機空拍路徑選擇評估之研究 指導教授:蕭漢威 博士 國立高雄大學資訊管理學系. 學生:林嘉宏 國立高雄大學資訊管理學系碩士在職專班. 摘要. 無人飛行載具 (Unmanned aerial vehicle; UAV) 近年來發展迅速,在空拍的應 用上,小型 UAV 是發展最蓬勃的類別,小型無人定翼機是目前使用上最普遍的 UAV 機型,因其相對於衛星及有人飛機的眾多優點,使小型無人定翼機的空拍應 用率占整個空拍市場的比例越來越高。近年來空拍的主要目的為地形圖 (topographic map)、數值地形模型 (digital terrain model; DTM) 與正射影像圖 (digital orthophoto map; DOM) 等重要地理資訊的即時獲取,而其空拍所得的影像 品質與飛行路徑之位置精準度、高度精準度、飛行姿態理想度及飛行速度有密切 的相關,而以上各項的穩定飛行因素也會受到飛行期間環境變動的影響,另外, 飛行時間限制、飛行趟次限制以及空拍時的光量條件亦會影響空拍品質。依照這 些飛行條件,本研究提出六項評估指標:空拍路徑之位置精準度、高度維持、飛 行姿態、飛行速度及空拍行程之總耗電量與總飛行時間,以衡量小型無人定翼機 在不同飛行條件下的飛行品質。 本研究以實驗法對小型無人定翼機之空拍路徑選擇做不同風向及限制條件的 評估,透過實驗規劃,本研究規劃出具備相同航點數量、相同形狀與相等距離但 不同風向的四種路徑模式,以實驗用 UAV 進行實地飛行實驗,四種路徑模式在同 一次飛行中執行完畢,接著經由完整的飛行記錄檔之分析,評估實驗當時之風向, 並計算出四種不同風向路徑模式之六項評估指標,再針對考慮的飛行條件與六項 評估指標進行討論,建立飛行條件與評估指標的對應關係,最後以這些重要的評 估結果,對於不同飛行條件的情況下提出較為適合的空拍路徑選擇建議。. 關鍵字:無人飛機、小型空拍載具、路徑評估、飛行路徑選擇 iii.
(5) A Study of Evaluation Photography Flight Path of Lightweight Fixed-Wing Unmanned Aerial Vehicle Advisor: Dr. Han-Wei Hsiao Department of Information Management National University of Kaohsiung Student: Chia-Hung Lin Department of Information Management National University of Kaohsiung ABSTRACT UAV (Unmanned aerial vehicle) has been rapidly developed in recent years, and lightweight UAV is progressed very well in aerial photography application. The lightweight fixed-wing UAV is the most popular type for aerial photography because of its advantages more than satellite imagery and manned aircraft. The main purpose of aerial photography is to get the geographic information such as topographic map, DTM (digital terrain model), and DOM (digital orthophoto map). The quality of these maps is related to location accuracy, altitude accuracy, attitude, and flight speed of the UAV. These factors are affected by environmental conditions such as winds. In addition, the flying time and the number of flight tasks restrictions, and low light conditions will also affect the quality of aerial imagery. This study introduces six indicators to measure the quality of lightweight fixed-wing UAV’s flight path in different conditions and restrictions. The indicators are location accuracy, altitude accuracy, attitude, flight speed, total power consumption, and flight duration. This study uses the experimental method to evaluate the quality of lightweight fixed-wing UAV’s photography flight path by different constraints and wind directions. The experiment is designed as four flight path modes under the condition of the same number of waypoints, the same planned path, and the same path distance but different wind directions. The researcher uses a 1400mm wingspan UAV to perform the flight experiment by four modes in a flight task. After the flight task completed, the researcher analyzes the flight logs to estimate the wind direction and calculate six measurements of four modes, and then the researcher discusses and evaluates the relation between flight conditions and six indicators. Finally, according to the evaluation, some advices on flight path selection will be suggested in different flight conditions and restrictions. Keywords: Unmanned aerial vehicle, lightweight aerial photography UAV, path evaluation, flight path selection iv.
(6) 目錄 學位論文審定書 ................................................................................................................i 誌謝 .................................................................................................................................. ii 摘要 ................................................................................................................................. iii ABSTRACT .....................................................................................................................iv 目錄 ................................................................................................................................... v 圖目錄 ............................................................................................................................ vii 表目錄 ..............................................................................................................................ix 第 1 章. 前言 ............................................................................................................... 1. 1.1. 研究背景.................................................................................................... 1. 1.2. 研究動機.................................................................................................... 6. 1.3. 研究目的.................................................................................................. 11. 第 2 章. 文獻探討 ..................................................................................................... 13. 2.1. 定翼UAV常用之路徑跟隨演算法 ......................................................... 13. 2.2. 路徑跟隨演算法之效能比較.................................................................. 19. 2.3. 實驗用UAV之路徑跟隨演算法 ............................................................. 21. 第 3 章. 實驗設計 ..................................................................................................... 23. 3.1. 實驗用無人飛行器系統之配備與規格.................................................. 23. 3.2. 實驗規劃.................................................................................................. 25. 3.3. 進行實驗.................................................................................................. 30. 3.4. 飛行記錄檔分析...................................................................................... 31. 第 4 章. 實驗與評估 ................................................................................................. 37. 4.1. UAV之路徑跟隨參數調整 ..................................................................... 37. 4.2. 實地飛行實驗.......................................................................................... 39. 4.3. 分析飛行記錄檔...................................................................................... 40. 4.4. 風向之評估.............................................................................................. 47. 4.5. 計算衡量值.............................................................................................. 52. 4.6. 指標評估與路徑建議.............................................................................. 63 v.
(7) 第 5 章. 結論與未來方向 ......................................................................................... 67. 參考文獻 ......................................................................................................................... 71. vi.
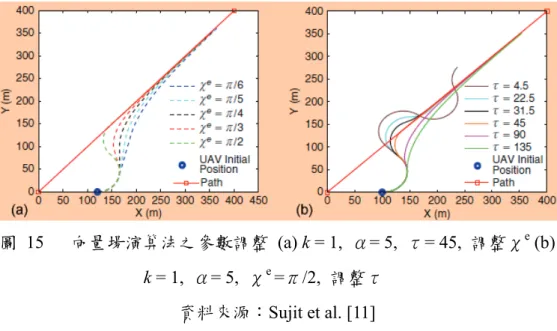
(8) 圖目錄 圖 1. 定翼機升力示意圖 ........................................................................................ 1. 圖 2. 定翼機的操控翼片 ........................................................................................ 2. 圖 3. 多航帶之空拍路徑規劃 ................................................................................ 6. 圖 4. 影像前後重疊率與側向重疊率示意圖 ........................................................ 7. 圖 5. 正射影像鑲嵌合成 ........................................................................................ 8. 圖 6. 空拍影像之排列 (a) 理想狀況 (b) 考慮飛行路徑誤差 ........................... 9. 圖 7. UAV機身及相機傾斜對影像重疊率之影響 ................................................ 9. 圖 8. 側風對UAV的行進方向、偏航角及影像重疊率之影響 (a) 無側風 (b) 漂移 (c) 側飛 .............................................................................................. 10. 圖 9. 直線路徑之航跡偏差 .................................................................................. 13. 圖 10. 胡蘿蔔追逐演算法之虛擬目標點及δ參數 .............................................. 14. 圖 11. 胡蘿蔔追逐演算法之δ參數調整 .............................................................. 15. 圖 12. 非線性導引律 (a) 虛擬目標點及L參數 (b) L參數調整 .......................... 16. 圖 13. PLOS導引律之參數調整 (a) k2 = 3, 調整k1 (b) k1 = 100, 調整k2 ........... 16. 圖 14. 直線目標路徑之向量場 .............................................................................. 17. 圖 15. 向量場演算法之參數調整 (a) k = 1, α= 5, τ= 45, 調整χe (b) k = 1, α= 5, χe =π/2, 調整τ ............................................................................. 18. 圖 16. LQR演算法之q22 參數調整 ......................................................................... 19. 圖 17. 五種路徑跟隨演算法之效能比較 .............................................................. 20. 圖 18. ArduPlane之直線路徑跟隨演算法 ............................................................. 22. 圖 19. 實驗流程 ...................................................................................................... 23. 圖 20. 本研究使用之小型無人定翼機 .................................................................. 24. 圖 21. 營造不同的風向條件之路徑設計 .............................................................. 25. 圖 22. 正方形實驗空拍區域 .................................................................................. 27. 圖 23. 不同風向之路徑模式的航點規劃 .............................................................. 28. 圖 24. 四種不同風向之路徑模式 .......................................................................... 29. 圖 25. 飛行姿態示意圖 .......................................................................................... 34 vii.
(9) 圖 26. 以試誤法進行實驗用UAV路徑跟隨參數T調整之試飛軌跡 .................... 38. 圖 27. 實驗當天環保署楠梓測站的每小時平均風速與風向參考資料 .............. 39. 圖 28. 實地飛行實驗之自動飛行模式的飛行軌跡 .............................................. 40. 圖 29. 順逆風側向b模式的電力相關類別(記錄頻率 1hz)之有效點位.......... 41. 圖 30. 順逆風側向b模式的定位相關類別(記錄頻率 5hz)在迴轉範圍 30 公尺 下之有效點位 .............................................................................................. 41. 圖 31. 迴轉範圍 30 公尺之各風向模式定位相關類別的有效點位 .................... 42. 圖 32. 不同迴轉範圍之最大滾轉角偏差量絕對值比較圖 .................................. 44. 圖 33. 不同迴轉範圍之最大俯仰角偏差量絕對值比較圖 .................................. 45. 圖 34. 迴轉範圍 90 公尺(黃框)與航點半徑 30 公尺(橘框)示意圖 .......... 46. 圖 35. 迴轉範圍 240 公尺之對地速度有效點位 .................................................. 48. 圖 36. 總風速、風向與西風分量、北風分量之關係圖 ...................................... 49. 圖 37. 航點 2 之盤旋軌跡與第二圈速度最快之五個點位 .................................. 50. 圖 38. 不同迴轉範圍之位置精準度衡量值比較圖 .............................................. 53. 圖 39. 不同迴轉範圍之高度維持衡量值比較圖 .................................................. 55. 圖 40. 不同迴轉範圍之俯仰角衡量值比較圖 ...................................................... 56. 圖 41. 不同迴轉範圍之滾轉角衡量值比較圖 ...................................................... 57. 圖 42. 不同迴轉範圍之側航角衡量值比較圖 ...................................................... 58. 圖 43. 不同迴轉範圍之平均飛行速度比較圖 ...................................................... 59. 圖 44. 不同迴轉範圍之飛行速度標準差比較圖 .................................................. 60. 圖 45. 不同迴轉範圍之最大飛行速度比較圖 ...................................................... 60. 圖 46. 不同迴轉範圍之最小飛行速度比較圖 ...................................................... 61. viii.
(10) 表目錄 表 1. 依航程範圍、飛行高度、續航力及重量之UAV分類 ................................ 3. 表 2. 衛星、有人飛機與小型UAV空拍之特性比較 ............................................ 5. 表 3. 五種路徑跟隨演算法之直線路徑最佳參數、優點及限制 ...................... 20. 表 4. 不同風向之路徑模式的詳細資料 .............................................................. 30. 表 5. 本研究使用的ArduPlane記錄類別與欄位 ................................................. 32. 表 6. 不同迴轉範圍之最大滾轉角偏差量 .......................................................... 43. 表 7. 不同迴轉範圍之最大俯仰角偏差量 .......................................................... 45. 表 8. 四種風向模式完成轉彎時之迴轉範圍 ...................................................... 46. 表 9. 不同行進方向的航帶之平均對地速度 ...................................................... 48. 表 10. 盤旋第二圈中最大對地速度前五名之點位 .............................................. 51. 表 11. 四種風向模式準確的風向資料 .................................................................. 52. 表 12. 以比較的觀點呈現的四種風向模式之風向資料 ...................................... 52. 表 13. 不同迴轉範圍之位置精準度衡量值 .......................................................... 53. 表 14. 不同迴轉範圍之俯仰角衡量值 .................................................................. 56. 表 15. 不同迴轉範圍之滾轉角衡量值 .................................................................. 57. 表 16. 四種風向模式內之不同風向航帶的飛行速度衡量值 .............................. 62. 表 17. 四種風向模式之總耗電量 .......................................................................... 62. 表 18. 四種風向模式之總飛行時間 ...................................................................... 63. 表 19. 各項衡量指標表現最佳之模式與關鍵條件 .............................................. 64. 表 20. 不同飛行條件下的空拍路徑設計建議 ...................................................... 66. ix.
(11) 第1章 1.1. 前言. 研究背景 無人飛行載具 (Unmanned aerial vehicle; UAV) 是機上無需駕駛人員的飛行器,. 可重複起降使用 [1], [2],可在遠端操控飛行、按照指定航點 (waypoint) 飛行或自 主飛行,自主飛行意指在沒有人為干預下進行自我策決與自動飛行 [3]。UAV 最 初用於軍事用途,由 1910 年代的無人空中炸彈開始發展。第一架可重複使用的 UAV 於 1930 年代誕生,主要作為靶機之用 [4], [5],經過多年研發,UAV 已發展 出多種類型及尺寸。 UAV 依 提 供 升 力 的 方 式 不 同 , 主 要 可 區 分 為 定 翼 (fixed-wing) 、 旋 翼 (rotary-wing)、拍撲翼 (flapping-wing) 以及輕於空氣 (lighter-than-air) 等類型 [1], [5],而在實際應用上以定翼機及旋翼機較為普遍。根據 [6] 研究,在歐洲地區的 非軍事用 UAV 產品中,定翼機的占比為 58.2%,旋翼機為 25.5%,兩者合計占了 83.7%。 定翼機具備一個推進系統及一組固定的主翼 (wing),推進系統負責產生前進 的推力,隨著飛機前進速度的增加,主翼上因白努利原理產生的升力亦隨之增加, 當往上的升力大於飛機的重量時,飛機即可浮升,如圖 1。. 圖 1. 定翼機升力示意圖 資料來源:FAA [7] 1.
(12) 定 翼機 的飛 行姿態 由 機上的 副翼 (aileron) 、升降 舵 (elevator) 與方向舵 (rudder) 等操控翼片控制,圖 2 為一典型定翼機之操控翼片配置。. 圖 2. 定翼機的操控翼片. 相較於定翼機,旋翼機沒有機翼,其升力直接靠螺旋槳提供,又區分為單旋 翼與多旋翼,單旋翼如直升機,只有一個主螺旋槳,多旋翼因螺旋槳數目不同, 又可細分為三旋翼、四旋翼、六旋翼、八旋翼等,其運動控制則由改變不同螺旋 槳的轉速來達成。 拍撲翼機雖然有機翼,但並無往前的推進系統,其升力及推力皆使用機翼之 拍撲動作取得,係仿效自然界中鳥類、蟲類之飛行動作。輕於空氣飛行器使用密 度低於空氣之氣體,如氫氣、氦氣,填充於飛行器的氣囊,使得整體重量低於同 體積之空氣,進而飄浮在空中,例如飛行船。. 2.
(13) 根據 [6] 研究,UAV 依航程範圍、飛行高度、續航力及重量,又可分為十七 類別,如表 1。 表 1. 依航程範圍、飛行高度、續航力及重量之 UAV 分類 資料來源:Blyenburgh [6] 航程範圍 飛行高度 續航力 重量 (公里) (公尺) (小時) (公斤). UAV 類別. 縮寫. Nano. η. <1. 100. <1. < 0.025. Micro. μ. < 10. 250. 1. <5. Mini. Mini. < 10. 150 - 300. <2. < 30. Close Range. CR. 10 - 30. 3,000. 2-4. 150. Short Range. SR. 30 - 70. 3,000. 3-6. 200. Medium Range. MR. 70 - 200. 5,000. 6 - 10. 1,250. Medium Range Endurance. MRE. > 500. 8,000. 10 - 18. 1,250. Low Altitude Deep Penetration. LADP. > 250. Low Altitude Long Endurance. LALE. > 500. 3,000. > 24. < 30. Medium Altitude Long Endurance MALE. > 500. 14,000. 24 - 48. 1,500. HALE. > 2,000. 20,000. 24 - 48 12,000. Unmanned Combat Aerial Vehicle UCAV. ~ 1,500. 10,000. ~2. 10,000. High Altitude Long Endurance. 50 - 9,000 0.5 - 1. 350. Lethal. LETH. 300. 4,000. 3-4. 250. Decoy. DEC. 0 - 500. 5,000. <4. 250. Stratospheric. STRATO. > 2,000. Exo-stratospheric. EXO. 待定義. > 30,000 待定義 待定義. Space. SPACE. 待定義. 待定義. > 20,000 & > 48 < 30,000. 待定義. 待定義 待定義. 在 UAV 的十七類別之中,以 micro 及 mini 類別之小型 UAV 發展最為蓬勃, 根據 [6] 研究,這兩類占了歐洲地區非軍事用 UAV 產品之 62.6%。小型 UAV 近 年來於民間的應用大增,主要是因為具有以下優點: 1) 體積小、重量輕、成本低,降低了購入門檻 近年來,由於單晶片、微機電系統 (micro-electro-mechanical systems; 3.
(14) MEMS) 的進步,控制、感測元件逐漸小型化及低價化,使得小型 UAV 的核心飛行控制系統縮小至信用卡大小,大大地降低了飛行控制系統的 重量。機身材料的進步,讓相同大小的機身更輕量化,滯空時間更長。 高密度電池,使得同樣重量的電池有更多的電力,可以飛得更久。開放 原始碼之飛行控制系統,不但讓飛行控制軟體發展地更健全與快速,也 降低了飛行控制系統的取得成本。 2) 機動性高 小型 UAV 因體積小、重量輕,使得攜帶、移動方便,一般小客車即可運 送,甚至可隨身攜帶,機動性高。 3) 起降地點限制較少 小型無人定翼機可以手持拋射或以機械裝置彈射起飛,不需要機場,降 落僅需短跑道或平坦的空地即可,小型旋翼 UAV 限制更少,可垂直起降, 不需要跑道。 4) 操作門檻低 相較於一般有人飛機、直升機動輒半年以上的飛行訓練課程,小型 UAV 的操作訓練僅需兩週 [8],操作複雜度相對地低了許多,更容易入門。 5) 操作人員少,一至三人即可執行任務 空拍是小型 UAV 的重要應用之一,空拍應用於許多場合,諸如災害評估、監 測、管理、危險區域調查、地理調查、地形地物監測、搜救、目標物搜尋、生態、 氣象、水文以及交通等眾多應用。傳統的空拍有二種模式,一是透過衛星取得衛 星影像,二是以有人飛機進行航照圖之拍攝。衛星因飛行高度在數百公里以上, 其影像之地面解析度較差,以福爾摩沙衛星二號為例,黑白影像之地面取樣間距 (ground sampling distance; GSD) 為 2 公尺,也就是其影像中相鄰兩像素之間距代 表的地面距離為 2 公尺。雖然 2014 年剛投入運轉的高解析度衛星 WorldView-3, 其黑白影像解析度已提昇至 0.31 公尺(31 公分),彩色解析度 1.24 公尺,但衛星 影像的取得成本過高仍然沒有改變,進入門檻相當高。另外,在數百公里高空拍 攝也容易遭受雲層遮蔽而無法拍到全景,加上取得影像的等待時間較長,對於有 時間緊迫性的應用較不適合,例如即時的災害評估與監控。 4.
(15) 有人飛機之航空攝影雖然飛行高度較低,影像解析度相對衛星為高,影像可 在空拍任務完成後立即取得,甚至可在飛行中即時傳送至地面站,即時性較高, 但必須承受較高的人員風險,尤其是處於危險地形或惡劣氣候下,而且其成本也 還是相對高昂。小型 UAV 因其輕量化及操控靈活性,可在 50 至 300 公尺之低空 相對安全地飛行,幾乎不受雲層遮蔽之影響,搭載的相機需考量其載重能力、空 間與飛行時間,通常以小型的消費型相機為主,以 Ricoh GRD 4 為例,重量 217 公克,在 200 公尺的高度拍攝,地面解析度可達 0.068 公尺(6.8 公分) ,而本研究 使用的迷你攝錄影機 HTC RE,重量 67 公克,在超廣角功能關閉的錄影模式之下, 200 公尺高度之地面解析度為 17.05 公分,若要求地面解析度在 10 公分左右,必 須將飛行高度降至 120 公尺。 相較於衛星與有人飛機,小型 UAV 空拍有以下優點:低成本、低人員風險、 高機動性、低部署時間、高影像解析度、受雲層影響小,因此普遍應用於空拍範 圍不是太大的場合。以上三種空拍方式之特性比較如表 2。 表 2. 衛星、有人飛機與小型 UAV 空拍之特性比較. 空拍方式. 衛星. 有人飛機. 小型 UAV. 成本. 甚高. 高. 低. 人員風險. 低. 高. 低. 部署時間. 長. 中. 短. 飛行高度. 高. 中. 低. 單一影像涵蓋範圍. 大. 中. 小. 受雲層遮蔽影響程度. 高. 中. 低. 影像解析度. 低. 中. 高. 影像即時性. 低. 高. 高. 運用於空拍的小型 UAV 主要有兩種類型,一類是定翼機,另一類是旋翼機。 定翼機的升力大部分由主翼提供,動力系統只需負責前進的推力,相對地,旋翼 機的升力及推進力全部由螺旋槳提供,所以在相同耗能之下,定翼機的航程較遠、 滯空時間較長、空拍範圍較大。定翼機的對地飛行速度比較快,在強風中的運作 能力比旋翼機好,但也因為速度快,在降落時可能因為一點人為疏失而對 UAV 造 5.
(16) 成嚴重的損害,就一般飛行而言,操控定翼機需要較高的技巧與較多的經驗。以 空拍的應用而言,旋翼機主要用於可抵達或接近空拍現場之場合,並進行小範圍 或定點懸停空拍,而定翼機因航程較遠,可用於不易或不可接近之場合,由遠處 起飛至該地進行空拍,或進行稍大範圍之空拍。因定翼機的空拍範圍較大,區域 性的空拍通常會選用定翼機來執行,以節省時間。 綜觀上述,定翼機是使用最廣泛的 UAV 類型,小型 UAV 是發展最蓬勃的類 別,小型無人定翼機是目前使用上最普遍的 UAV 機型,在空拍的應用上,因其相 對於衛星及有人飛機的眾多優點,使小型無人定翼機的空拍應用越來越普遍,也 成為越來越重要的研究議題。. 1.2. 研究動機 由於小型無人定翼機的空拍高度較低,其拍攝之單一影像涵蓋範圍較小,在. 進行較大範圍的空拍任務時,通常會以多條航帶 (flight strip) 的方式飛行,拍攝連 續的許多張影像來涵蓋整個拍攝範圍,事後再進行拼接。例如圖 3 中,黃色路徑 為規劃路徑,紅色路徑為實際飛行路徑,UAV 在整個飛行過程中,以錄影或固定 時間間隔的方式,連續地拍攝影像,以取得涵蓋整個拍攝範圍的許多張影像。. 圖 3. 多航帶之空拍路徑規劃. 完成空拍飛行任務並取得一連串的許多張影像之後,要對這些影像進行後製, 空拍的主要後製產物為地形圖 (topographic map)、數值地形模型 (digital terrain model; DTM) 與正射影像圖 (digital orthophoto map; DOM),在製作時除了要求所 有航帶上拍攝的一連串影像要覆蓋整個拍攝範圍,也要求影像之間要有一定的重 6.
(17) 疊率 (overlap)。影像重疊率係指兩張影像拍攝到的地理範圍之重複程度,以百分 比 表 示 , 重 疊 率 又 分 為 前 後 重 疊 率 (forward overlap) 與 側 向 重 疊 率 (lateral overlap),前後重疊率是同一航帶內前後影像之重疊率,側向重疊率則是相鄰航帶 間的影像重疊率,如圖 4 所示。不同的空拍後製產物要求的影像重疊率有所不同, 例如地形圖的製作,一般要求前後重疊率 60%以上,側向重疊率 30%以上,而正 射影像圖則要求前後及側向重疊率皆要在 60%以上。. 圖 4. 影像前後重疊率與側向重疊率示意圖 資料來源:Xiang and Tian [9]. 正射影像圖為空拍的重要後製產物之一,在取得空拍範圍內的所有影像之後, 需進行正射糾正 (orthorectification),以消除因中心投影之攝影方式造成的高差位 移 (relief displacement) 及相機傾斜造成的傾斜位移 (tilt displacement),使得影像 上任何地方的比例尺達到一致,之後再進行正射影像鑲嵌 (orthomosaic),將所有 的影像鑲嵌合成一個涵蓋空拍範圍的正射影像圖,例如圖 5 所示,最後的正射影 像圖由許多張的正射影像鑲嵌而成。. 7.
(18) 圖 5. 正射影像鑲嵌合成. 資料來源:Mozas-Calvache et al. [10]. 正射影像圖的精確程度與影像品質受以下因素影響: 1) 影像重疊率是否足夠 充足的影像重疊率是製作良好正射影像圖的必要條件,在 UAV 依照理想 規劃路徑飛行且飛行姿態在理想狀態的前提之下,影像前後重疊率與飛 行高度、飛行速度及相機連拍時間間隔有關,側向重疊率則與空拍路徑 的航帶間距相關。飛行速度主要與 UAV 性能有關,連拍時間間隔則與相 機的規格相關,在規劃空拍路徑時,必須考量此二因素以及要達成的影 像重疊率與影像解析度,定出飛行高度及航帶間距。但事實上真正執行 空拍任務時,因為有風及其他影響因素存在,UAV 較難依照理想規劃路 徑飛行,風會影響下列因素,進而對影像重疊率造成影響,茲述如下: a) 飛行速度 在固定的飛行高度與連拍時間間隔之下,若順風飛行時,飛行速 度變快,會使影像前後重疊率變小。相對的,在逆風狀況下,影 像前後重疊率會變大。 b) 飛行路徑精準度 UAV 在完美理想情境下,可完全按照規劃路徑飛行,其拍攝之影 像應如圖 6 (a) 般整齊排列、重疊率一致。在實際有風的環境下, UAV 的實際飛行路徑與規劃路徑間存在飛行路徑誤差,使得重疊 8.
(19) 率受到影響,如圖 6 (b),但飛行路徑精準度越高,重疊率受影響 程度越小。. 圖 6 空拍影像之排列 (a) 理想狀況 (b) 考慮飛行路徑誤差 c) 拍攝時 UAV 相機是否保持水平 風的吹襲容易造成 UAV 機身及相機傾斜,當 UAV 有俯仰角 (pitch) 前後傾斜時,會對前後重疊率造成影響。當 UAV 有滾轉角 (roll) 左右傾斜時,會對側向重疊率造成影響。以圖 7 為例,當拍攝相 鄰兩張影像時,UAV 皆保持水平,其影像重疊率為規劃的 50%, 但若其中一張影像在拍攝時,UAV 因風的影響而傾斜 10 度,則 重疊率受到影響而縮減至約 23%。. 圖 7 UAV 機身及相機傾斜對影像重疊率之影響. 9.
(20) d) UAV 偏航角 (Yaw) 是否與行進方向一致 飛機在有側風的環境下飛行時,若不改變偏航角,也就是機頭方 向,飛機會被風吹偏,產生漂移,而無法保持行進方向,如圖 8 (b) 所示。為了保持行進方向,飛機必須改變偏航角,往風的來 源方向修正,以抵銷側風產生的漂移,稱之為側飛 (crab),此時 行進方向保持了,但偏航角與行進方向不一致,兩者間有一夾角, 此一夾角會隨著側風風速增強而變大。在側風下進行空拍飛行的 影像重疊率會低於無側風的狀況,如圖 8 (c) 與圖 8 (a) 所示。. 圖 8. 側風對 UAV 的行進方向、偏航角及影像重疊率之影響 (a) 無側風 (b) 漂移 (c) 側飛. 2) 影像拍攝高度是否一致 拍攝高度除了會影響重疊率以外,也會影響拍攝影像之地面解析度,高 度若不一致會造成每張影像的地面解析度不一致,在進行影像鑲嵌時, 會產生影像拉扯,造成影像品質下降。 3) 影像是否有傾斜位移 在拍攝影像時,相機若傾斜,會影響重疊率,也造成影像有傾斜位移, 須針對此傾斜位移進行正射糾正,在進行此一糾正時,會有影像形變的 現象,造成影像解析度的降低,且傾斜角度越大,形變的程度越大,解 析度的降低程度也越大。 10.
(21) 4) 空拍時的光線是否充足 進行空拍時的光線是否充足,會影響到拍攝影像的品質,但有時候必須 在光線不足的狀況下進行空拍任務。當光線不足時,在其他攝影參數相 同的條件之下,相機需要較長的曝光時間,以達到正常的曝光量,但因 為 UAV 是一直在移動的,拉長快門時間會造成拍攝的影像模糊,此時 UAV 必須飛得比光線充足時還慢,以避免拍出模糊的相片。在這種情況 之下,飛行速度便是影響拍攝品質的重要因素。. 除了以上正射影像圖品質的影響因子之外,小型無人定翼機在進行空拍時, 有時候會有一些條件限制,例如飛行時間的限制,當飛行時間受限時,需要規劃 出在受限時間內完成並維持一定攝影品質的空拍路徑,此時如何善用風向,對該 場域規劃出最短飛行時間的空拍路徑,值得探討。另一限制,例如飛行趟次的限 制,在此狀況下,如何配合風向,最大化飛行距離,以增加單次空拍的區域範圍, 亦是空拍值得關注的問題。 綜合以上,在規劃好空拍路徑之後,正射影像圖的品質受以下關鍵因素影響: 1) 飛行路徑精準度; 2) 影像拍攝高度是否一致; 3) UAV 的飛行姿態是否理想, 是否保持水平、偏航角是否與行進方向一致; 4) 飛行速度。而這四個因素均受風 向之影響,為追求良好之空拍影像品質,本研究將對小型無人定翼機之空拍路徑 選擇做不同風向條件的評估,以期了解風向如何影響此四因素,進而因應不同飛 行條件,規劃出最佳空拍品質之飛行路徑。 除了上述受風向影響的因素之外,飛行趟次與飛行時間的受限亦會影響空拍 品質,本研究亦將針對此兩項限制,加入總飛行耗電量與總飛行時間此兩個影響 評估項目,並進行不同飛行條件對此兩個項目之影響評估研究,進而得知在這些 限制條件下,如何善用飛行條件,規劃出最有利的空拍路徑。. 1.3. 研究目的 針對以上論述中影響空拍品質的關鍵因素及飛行條件限制,本研究提出以下. 六項評估指標,衡量在不同飛行條件之下,UAV 執行規劃之空拍路徑時,在六個 方面的表現況狀。 11.
(22) 1) 空拍路徑之位置精準度 2) 空拍路徑之高度維持 3) 空拍路徑之飛行姿態 4) 空拍路徑之飛行速度 5) 空拍行程之總耗電量 6) 空拍行程之總飛行時間. 本研究的目的在於使用上述六項評估指標來衡量空拍路徑受不同飛行條件的 影響程度,將以小型無人定翼機進行實驗,探討相同的飛行路徑,在不同的飛行 條件下,對每種評估指標表現之影響,以求出對每種評估指標最有利之飛行條件, 進而在不同飛行條件的限制下,規劃出最佳空拍路徑之方法,以取得該環境下之 最佳空拍品質。. 12.
(23) 第2章. 文獻探討. 以製圖為目的之空拍任務會要求原始空拍影像必須達到設定的影像解析度與 影像重疊率,在規劃空拍路徑時,必須考量要達成的影像解析度與影像重疊率, 配合空拍相機的規格參數,定出飛行高度及航帶間距,規劃出涵蓋空拍區域的多 航帶空拍路徑。 這些事先規劃好的空拍路徑由航點組成,如圖 3 中的白點,再將這些航點組 合成路徑,如圖 3 中的黃線,交由 UAV 跟隨指定路徑及高度飛行。在自動飛行的 模式下,UAV 的路徑跟隨系統負責執行規劃好的航點路徑,路徑跟隨系統的設計 方式會影響到空拍路徑之位置精準度,本章將介紹目前定翼 UAV 常用的路徑跟隨 演算法及本研究實驗用 UAV 使用之路徑跟隨演算法。. 2.1. 定翼UAV常用之路徑跟隨演算法 UAV 的規劃路徑主要由直線與圓弧構成,路徑跟隨系統之目的在於精準地控. 制 UAV 跟隨著這些直線或圖弧飛行,使實際飛行路徑與規劃路徑間的航跡偏差 (cross-track error) 縮到最小,並且要能克服飛機內部與外界環境因素的干擾,例如 機身的不平衡與風的干擾,讓飛機跟隨路徑前進。空拍路徑主要由直線路徑所組 成,其執行時的航跡偏差即為每一時刻飛機的位置與理想路徑直線的垂直距離, 以圖 9 為例,UAV 位於 p 點,與兩航點 Wi、Wi+1 組成的直線路徑之垂直距離 d 即 為 UAV 在該點的航跡偏差,本研究亦將使用航跡偏差值來計算空拍路徑之位置精 準度。. 圖 9. 直線路徑之航跡偏差. 資料來源:Sujit et al. [11] 13.
(24) 路徑跟隨系統是空中、水中及陸地無人載具的基本配備系統,路徑跟隨演算 法種類繁多,根據 [11] 研究,針對其中具備簡單、抗風性強及易於實作等特性且 適用於定翼 UAV 的路徑跟隨演算法,介紹如下,而由於本研究之空拍路徑僅由直 線構成,以下演算法僅介紹直線跟隨的部分。 1) 胡蘿蔔追逐 (Carrot-Chasing) 演算法 胡蘿蔔追逐演算法採用虛擬目標點 (virtual target point; VTP) 來導 引 UAV,如圖 10,在目標路徑上定出一個虛擬目標點 s,並且讓 UAV 追逐此點。其中虛擬目標點 s 與 UAV 目前位置對目標路徑的垂直投影點 q 的距離是常數值δ,UAV 為了追逐此點,會改變其行進方向,當 UAV 位置改變後,重新計算出 q 點位置並加上δ的距離定出新的虛擬目標點, 再令 UAV 追逐新的虛擬目標點,如此重複可讓 UAV 的飛行路徑靠近目 標路徑,並抵達 Wi+1 航點。. 圖 10. 胡蘿蔔追逐演算法之虛擬目標點及δ參數 資料來源:Sujit et al. [11]. 胡蘿蔔追逐演算法的效能調整參數為δ,需針對 UAV 規格的不同, 調整δ值的大小,以求得最快的路徑靠近率與最小的航跡偏差。圖 11 為 針對不同的δ值以模擬軟體進行模擬飛行之結果,模擬選用的 UAV 機型 為 Zagi [12] 三角翼飛機,模擬條件為有風環境、最小轉彎半徑 45 公尺、 飛行空速每秒 15 公尺,研究 [11] 的所有模擬飛行均採用此機型與條件。 模擬結果顯示太小的δ(0 或 10)會產生過度振盪的路徑,δ為 30 時可 達到較好的路徑靠近率與航跡偏差。 14.
(25) 圖 11. 胡蘿蔔追逐演算法之δ參數調整 資料來源:Sujit et al. [11]. 前述之空速 (airspeed) 是指 UAV 飛行時相對於周圍空氣運動的速度, 也就是把風速的影響去除後之對地速度,或是無風狀態下的對地速度。 當 UAV 逆風飛行時,空速為 UAV 之對地速度加上風速,順風時則為對 地速度減掉風速。在相同的對地速度之下,逆風時之空速比順風時高, 而定翼 UAV 的空速與其因白努利原理產生的升力成正比,所以在順風時 的對地速度要比逆風時更快,才能取得與逆風時一樣的升力。也因為在 同樣的對地速度下,逆風時定翼機的空速較高、升力較大,所以定翼機 通常是逆風起飛,以減少爬升所需的水平距離。 2) 非線性導引律 (Nonlinear Guidance Law; NLGL) 非線性導引律也是採用虛擬目標點之概念,但虛擬目標點的位置之 訂定策略不同,如圖 12 (a) 所示,以 UAV 所在位置為圓心,以參數 L 為半徑畫圓,該圓與目標路徑相交於 s 與 s’兩點,其中在 UAV 行進方向 上的 s 點即為虛擬目標點。非線性導引律的調整參數為 L,若 L 小於當時 的航跡偏差,則以 L 為半徑的圓不會與目標路徑相交,也就是沒有虛擬 目標點,此時則令 UAV 以垂直於目標路徑的方向前進,不同 L 之模擬飛 行路徑如圖 12 (b) 所示。. 15.
(26) 圖 12. 非線性導引律 (a) 虛擬目標點及 L 參數 (b) L 參數調整 資料來源:Sujit et al. [11]. 3) 純追擊與直視 (Pure Pursuit and Light-of-Sight; PLOS) 導引律 PLOS 導引律結合了往 Wi+1 航點方向與垂直往目標路徑方向之導引 量,以圖 9 說明,第一個導引方向為 p 往 Wi+1,第二個導引方向為 p 往 q,往 Wi+1 的導引量再乘以調整系數 k1,往 q 的導引量乘以調整系數 k2, 而得到總導引量。PLOS 導引律有 k1 及 k2 兩個調整參數,以試誤法 (trial-and-error) 求得最佳飛行路徑的過程較為繁複,圖 13 (a) 為固定 k2 為 3,針對 k1 進行調整的模擬飛行結果,圖 13 (b) 則固定 k1 為 100,針 對 k2 進行調整。. 圖 13. PLOS 導引律之參數調整 (a) k2 = 3, 調整 k1 (b) k1 = 100, 調整 k2 資料來源:Sujit et al. [11]. 16.
(27) 4) 向量場 (Vector-Field; VF) 演算法 向量場演算法使用圖 14 之向量場來導引 UAV,隨著 UAV 所在位置 不同,其導引之方向也不同,UAV 會受向量場導引而逐漸接近目標路徑, 最終會被導引至目標路徑上。. 圖 14. 直線目標路徑之向量場. 資料來源:Sujit et al. [11] 向量場演算法有兩種運作模式,當 UAV 與目標路徑的距離大於邊界 設定值τ時,演算法會以一個與目標路徑固定的夾角,即所謂的進入角 (entry angle),也就是χe 的初始值,導引 UAV 接近目標路徑,而當 UAV 與目標路徑的距離在τ以內,也就是進入過渡區 (transition region),如圖 14 的黃線區域內,此時演算法會開始改變χe 的值,導引 UAV 至目標路 徑上。 向量場演算法的調整參數除了τ與χe 的初始值以外,還有兩個與轉 向角度相關的調整參數 k 與α,共四個調整參數,要求得最佳飛行路徑 之參數,須花費較多時間,圖 15 為針對χe 與τ進行調整之模擬飛行結 果。. 17.
(28) 圖 15. 向量場演算法之參數調整 (a) k = 1, α= 5, τ= 45, 調整χe (b) k = 1, α= 5, χe =π/2, 調整τ 資料來源:Sujit et al. [11]. 5) 線性二次調節器 (Linear Quadratic Regulator; LQR) 演算法 不同於上述的四種幾何方式的演算法,LQR 屬於控制方式的演算法。 LQR 演算法以最佳控制理論來計算驅動力 (control effort),目的在於以最 佳的驅動力來最小化航跡偏差,並以邊界設定值τ與航跡偏差的差來確 認 UAV 有在往目標路徑靠近。 LQR 演算法的兩個調整參數為邊界設定值τ與增益係數 q22,圖 16 為在固定的τ值下,調整 q22 之模擬飛行結果,當 q22 = 0.1 與 q22 = 0.5 時, UAV 靠近目標路徑的速度很快、加速度高,花費了較高的驅動力,而當 q22 太大時,又太慢與目標路徑交會,q22 = 1 有較佳的驅動力與航跡偏差。. 18.
(29) 圖 16. LQR 演算法之 q22 參數調整. 資料來源:Sujit et al. [11]. 2.2. 路徑跟隨演算法之效能比較 在 [11] 研究中,作者們對以上五種路徑跟隨演算法進行了比較,然而因為五. 種演算法的調整參數均不同,為了確保公平性,先以模擬軟體對每一種演算法求 出其最佳之調整參數,再以每種演算法的最佳參數來進行五種演算法之模擬飛行 比較。該研究使用花費之總驅動力 (total control effort) 與總航跡偏差 (total cross-track error) 來衡量比較五種演算法,衡量指標的計算方式如下: ζ = Γu + �1 − Γ�D. 其中u為平均花費驅動力,D為平均航跡偏差,Γ介於 0 到 1 之間,為u與D兩 者之間的權重比例,例如當u占 20%時,D則占 80%,衡量指標ζ的值越小,代 表有越好的效能。比較的結果如圖 17 所示,不管權重比例Γ為何,向量場演算法 (VF) 都擁有最好的效能,非線性導引律 (NLGL) 其次,胡蘿蔔追逐演算法 (carrot) 在與其他演算法相同的驅動力花費之條件下,航跡偏差最大,效能最差。. 19.
(30) 圖 17. 五種路徑跟隨演算法之效能比較 資料來源:Sujit et al. [11]. 雖然模擬結果顯示向量場演算法的效能最好,但其最佳參數調整並不容易, 有四個參數要隨 UAV 機型的不同而進行調整,相對而言,非線性導引律雖然效能 比向量場演算法低一些,但只需調整一個參數,相對簡單。表 3 列出以模擬飛行 求出的五種路徑跟隨演算法之直線路徑最佳參數、優點及限制。 表 3. 五種路徑跟隨演算法之直線路徑最佳參數、優點及限制 資料來源:Sujit et al. [11]. 演算法 直線演算法參數. 優點. 限制. Carrot. δ= 30. 實作簡單. 在強風下不穩定. NLGL. L = 50. 參數調整容易. 航跡偏差比 VF 大. PLOS. k1 = 60, k2 = 3. 實作簡單、直覺. VF. τ= 45, χe =π/3, k = 1, α= 5. 參數敏感度高,不易調整; 風速> 0.5 倍空速時無法追隨路徑. 航跡偏差小. 參數多,不易調整. LQR. q22 = 1. 最佳化驅動力花費. 航跡偏差大; 風速> 0.5 倍空速時無法追隨路徑. 20.
(31) 在上述的模擬飛行中,每種演算法都有加入隨時間變動的相同風向及風速條 件,而在模擬中假設 UAV 可得知精確的風向及風速,所以在模擬中每種演算法均 可針對確切的風向及風速進行因應。UAV 在有風的真實環境下飛行,若有即時的 精確風向及風速數據,可改善路徑跟隨演算法的效能。而實際上,大部分低價的 自動飛行系統並沒有精確的風向及風速計算機制,主要是因為使用較低階的感測 器,以及系統沒有足夠的運算能力來執行進階的風向、風速估算演算法。小型 UAV 由於其輕小,本身受風的影響本來就較大,若再加上沒有精確的風向及風速資訊, 其飛行軌跡受風影響的程度較大。. 2.3. 實驗用UAV之路徑跟隨演算法 本研究的實驗用小型無人定翼機採用 ArduPlane (APM:Plane) [13] 飛行控制系. 統,其路徑跟隨演算法是基於 [14] 提出的一種非線性方法,再加以改進而成,名 為 L1 控制器。L1 控制器結合了上述許多種演算法的概念,其直線跟隨部分有三 種模式:航點捕獲 (waypoint capture) 模式、目標路徑捕獲 (track capture) 模式以 及追蹤 (tracking) 模式。航點捕獲模式採用了 PLOS 導引律中的純追擊 (pure pursuit) 方式,導引 UAV 直接朝下一個航點飛去,當 UAV 下一個要到達的航點是 第一個航點,則會進入航點捕獲模式,如圖 18 的 (a) 狀況。目標路徑捕獲模式採 用了向量場演算法的進入角概念,當 UAV 在過渡區之外時,令其以固定的 45 度 角朝目標路徑前進,如圖 18 的 (b) 狀況,而當 UAV 與 L1point 的距離小於 L1length 時,會進入追蹤模式。追蹤模式引用了非線性導引律的虛擬目標點及 L 參數之概 念,但其改稱為 L1length,且 L1length 是動態改變的,其值與 L1 控制器的調整參數 T 與ζ有關,且與 UAV 的對地速度成正比,不像非線性導引律的 L 在設定好之後即 是固定的,進入追蹤模式後,UAV 會靠近並追隨目標路徑飛行,如圖 18 的 (c) 狀 況。. 21.
(32) 圖 18. ArduPlane 之直線路徑跟隨演算法. 資料來源:ArduPilot Dev Team [15]. 經由以上的探討,瞭解了常用的路徑跟隨演算法,以及本研究的實驗用小型 無人定翼機採用之路徑跟隨演算法,亦得知路徑跟隨演算法的最佳參數調整雖然 相當花時間,但對於演算法效能影響很大,有很高的重要性,而最佳參數與 UAV 的空氣動力學相關係數有關,這些係數又跟機身型態、主翼面積、重量、最小轉 彎半徑與飛行空速等相關。本研究將先對實驗用 UAV 進行試飛,以試誤法求得其 路徑跟隨演算法的合理參數,之後再進行正式的實驗飛行,進行不同飛行條件下 的空拍路徑之評估。. 22.
(33) 第3章. 實驗設計. 本研究以實驗法對小型無人定翼機進行不同飛行條件下之空拍路徑評估,實 驗流程如圖 19 所示,主要有四部分,分別為實驗規劃、進行實驗、飛行記錄檔分 析及結果分析,實驗完成後並提出建議。本章先介紹實驗用無人飛行器系統之配 備與規格,接著提出實驗規劃、進行實驗及飛行記錄檔分析之方法。. 圖 19. 3.1. 實驗流程. 實驗用無人飛行器系統之配備與規格 無人飛行器系統 (Unmanned aircraft system; UAS) 由無人飛行載具 (UAV). 及地面導控站 (ground control station; GCS) 構成,本節介紹實驗用的小型無人定 翼機及地面導控站之配備與規格。 1) 小型無人定翼機 23.
(34) 本研究使用之小型無人定翼機如圖 20 所示,其翼展 1400 mm、主翼 面積 0.26 m2,機身長 925 mm,使用最大功率 200 瓦特之無刷馬達,搭配 六吋螺旋槳,能量來源由 11.1V 5200mAH 鋰聚合物電池提供,飛行控制 系統使用 APM 2.5 飛控板,搭載 ArduPlane (APM:Plane) 3.2.3 軟體 [13], 空拍相機為 HTC RE,以 1080p 30 FPS 錄影模式拍攝,總重 1360 公克, 航高 120 公尺之最大航程約 24 公里。. 圖 20. 本研究使用之小型無人定翼機. 2) 地面導控站 地面導控站的主要功能為即時監控 UAV 之飛行狀態,包括地理位置、 飛行高度、飛行姿態、飛行速度、移動方向、電池剩餘電量、任務資訊 與任務狀態等資訊,並提供上傳自動飛行之目標路徑腳本與上傳控制指 令之功能。 本研究的地面導控站使用搭載 Microsoft Windows 作業系統的筆記型 電腦,安裝地面導控站軟體 Mission Planner [16],該軟體由 Michael Oborne 主導,是一套免費、開放原始碼的軟體,運作於 Microsoft Windows 作業 24.
(35) 系統之上。本研究的小型無人定翼機與地面導控站之間透過第三代行動 電話通訊網路進行資料傳輸,地面導控站可即時得知小型無人定翼機之 狀態資訊,並且可上傳指令給 UAV。. 3.2. 實驗規劃 本研究的實驗規劃分為三個部分,分別為:規劃不同風向之路徑模式、飛行. 參數選擇、製作目標路徑腳本,說明如下。 1) 規劃不同風向之路徑模式 本研究的實驗目的在於對小型無人定翼機之空拍路徑選擇做不同風 向及限制條件的評估,實地實驗時風向無法以人為方式改變,故本研究 以不同方向的飛行路徑來營造不同的風向條件,如圖 21 所示,圖中白點 為規劃的航點,由經度、緯度與高度組成,依航點可建立多航帶之空拍 路徑。若實驗時風向為西風,則圖 21 (a) 的航帶風向為側風,其中藍色 路徑之航帶執行順序為東至西,兩航帶之間的銜接路徑會遭遇逆風;紅 色路徑為西至東,兩航帶之間的銜接路徑則是順風飛行。圖 21 (b) 的航 帶風向為順風與逆風,藍色路徑執行順序為南至北,紅色路徑執行順序 為北至南,兩航帶之間的銜接路徑皆遭遇側風。以此路徑設計概念,可 規劃出不同風向條件的飛行路徑,且在同一次飛行中執行完畢。. 圖 21. 營造不同的風向條件之路徑設計. 25.
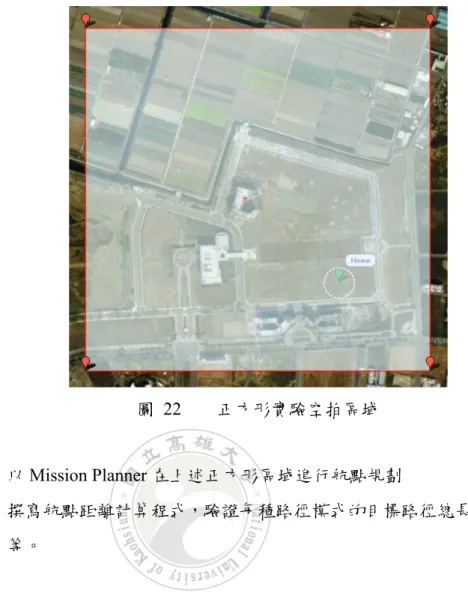
(36) 2) 飛行參數選擇 在實際的空拍任務中,空拍高度會影響影像解析度與影像前後重疊 率,故空拍高度的決定必須考量要達成的影像解析度與影像前後重疊率。 飛行高度也必須比空拍場域內的所有地上物還高,本研究之實驗場域為 高雄大學附近區域,所以飛行高度必須大於高雄大學最高建築物之高度。 另外,為了減輕因建築物造成的風向紊亂對實驗結果之干擾,實驗飛行 的高度下限設定在最高地上物高度的兩倍,即 80 公尺。 本研究的目標影像解析度為 10 公分,目標影像前後重疊率為 60%, 依 HTC RE 的相機參數計算,當高度為 120 公尺時,其拍攝影像的地面 解析度為 10.23 公分,接著必須確認實驗用小型無人定翼機在 120 公尺高 度飛行之影像前後重疊率大於等於 60%。先前提到,影像前後重疊率與 飛行高度、飛行速度及相機連拍時間間隔有關,本研究的 UAV 之最高飛 行速度約每秒 25 公尺,依此速度及高度 120 公尺計算,要達成 60%的影 像前後重疊率,相機連拍的時間間隔必須在 1.77 秒以內,本研究以 HTC RE 的 1080p 30 FPS 錄影模式拍攝,錄影檔內每兩幅圖像的時間間隔為 1/30 秒,連拍速度符合此一標準,故實驗飛行高度選訂為 120 公尺。 此外,不同風向之路徑模式的航點數量與目標路徑總長度必須相等, 以確切測量出風向的影響。本研究使用以下方法確保每種路徑模式的目 標路徑總長度相等: a) 撰寫距離計算程式,以計算給定高度及經緯度之兩點間的大圓弧 距離 (great-circle distance),並以此為輔,在 Mission Planner 地面 站軟體上定出一個正方形的實驗空拍區域,如圖 22 所示,如此 可確定與正方形的任一邊平行的路徑之長度相等,方便規劃路 徑。. 26.
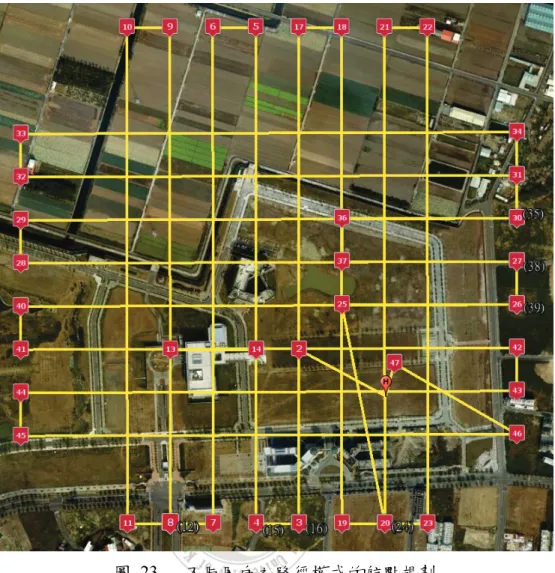
(37) 圖 22. 正方形實驗空拍區域. b) 以 Mission Planner 在上述正方形區域進行航點規劃 c) 撰寫航點距離計算程式,驗證每種路徑模式的目標路徑總長度相 等。. 除了航點的數量及距離外,還必須控制每種模式的航帶數量必須為 偶數(成對) ,以西風環境下的東西向(順逆風)模式為例,順風的航帶 數量必須與逆風的相等,以避免實驗數據偏向順風或逆風。 3) 製作目標路徑腳本 以上述路徑設計概念規劃出來的實驗飛行路徑如圖 23 所示,目標路 徑由 47 個航點組成,其中 H 標示的所在地為 home 點,UAV 將由此點起 飛,往航點 2 前進,接著將依序飛抵航點 3、航點 4,一直到航點 47。. 27.
(38) 圖 23. 不同風向之路徑模式的航點規劃. 目標路徑由四種不同風向之路徑模式組成,如圖 24 所示。若風向為 西風時,航點 4 至航點 11 組合成第一種路徑模式,如圖 24 (a),其航帶 方向為南北向,航帶風向為側風,執行順序由東至西,銜接路徑風向為 逆風,簡稱側風逆向模式。航點 16 至航點 23 為第二種路徑模式,如圖 24 (b),其航帶風向亦為側風,但銜接路徑風向為順風,簡稱側風順向模式。 航點 27 至航點 34 為第三種路徑模式,如圖 24 (c),其航帶風向有兩條是 順風、兩條是逆風,執行順序由南至北,銜接路徑風向是側風,簡稱順 逆風側向 a 模式。航點 39 至航點 46 為第四種路徑模式,如圖 24 (d),其 航帶風向亦為順逆風,銜接路徑風向也是側風,但航帶執行順序為由北 至南,簡稱順逆風側向 b 模式。. 28.
(39) 圖 24. 四種不同風向之路徑模式. 每種路徑模式由四條航帶構成,每條航帶皆為 900 公尺長,而相鄰 兩航帶的航帶間距,也就是銜接路徑的長度,皆為 78 公尺,故每種路徑 模式的目標路徑總長度皆為 3912 公尺。航帶間距的決定,關係到空拍影 像的側向重疊率,依空拍相機 HTC RE 之參數與飛行高度 120 公尺計算, 要達成目標側向重疊率 60%,航帶間距必須在 81.2 公尺以內,故將航帶 間距設為 78 公尺。 四種不同風向之路徑模式的詳細資料如表 4 所示,航點規劃完成後, 在 Mission Planner 地面站軟體上將其存成目標路徑腳本,以供實驗飛行 時使用。. 29.
(40) 表 4 模式. 3.3. 不同風向之路徑模式的詳細資料. 航帶方向 航帶風向 執行順序. 銜接路徑 航點編號 風向. 側風逆向. 南北向. 側風. 東至西. 逆風. 4 – 11. 側風順向. 南北向. 側風. 西至東. 順風. 16 – 23. 順逆風側向 a. 東西向. 順逆風. 南至北. 側風. 27 – 34. 順逆風側向 b. 東西向. 順逆風. 北至南. 側風. 39 – 46. 進行實驗 實驗的各項參數規劃完成,並產出飛行目標路徑腳本後,便可著手進行實驗,. 步驟如下: 1) 設定 UAV 飛控板 UAV 飛控板的路徑跟隨參數關係到 UAV 跟隨目標路徑飛行的精準 度與效能,在進行實地飛行實驗之前,必須先調整好路徑跟隨系統的參 數,以取得合理的路徑跟隨效能。先前提到,本研究使用的 ArduPlane 自 動 飛 行 系 統 之 路 徑 跟 隨 調 整 參 數 為 T (NAVL1_PERIOD) 與 ζ (NAVL1_DAMPING),必須先以試誤法進行試飛,調整這兩個參數至合 理範圍。 調整好路 徑跟 隨參數之後,即可將規劃好的目標路徑腳本透過 Mission Planner 上傳至飛控板,接下來便可進行飛行實驗。 2) 實地飛行實驗 風是本研究的重要環境因素,實地飛行實驗必須在有風的環境下進 行,但風速必須在實驗用 UAV 的可承受範圍內,以維持 UAV 的操作性 能。起飛前必須先確認定翼 UAV 的副翼、升降舵與方向舵等操控翼片的 運作是否正常,機上的感測器是否正常,GPS 的定位誤差是否過大,以 及航點是否設定正確,一切檢查無誤後才可起飛。 UAV 機上的位置資訊主要由其配備的全球衛星定位系統 (GPS) 接 收器取得,GPS 接收器在接收到三顆以上的衛星訊號時,才能定位,但 若只接收到三顆衛星,定位資訊的誤差較大,隨著接收到的衛星數目增 加,輸出的經緯度定位資訊的誤差會隨之降低,本研究要求實地飛行實 30.
(41) 驗必須在衛星數目八顆以上、誤差因子 HDOP (horizontal dilution of precision) 2.0 以下時,才能起飛,以確保經緯度資訊的精準度。 實地飛行實驗的起飛階段由操作人員以遙控器手動操作,到達安全 高度後,再切換至自動飛行模式,由飛控板接手依照規劃的目標路徑自 動飛行,目標路徑的所有航點執行完畢後,再由操作人員切換回手動模 式控制其降落。. 3.4. 飛行記錄檔分析 ArduPlane 飛控系統的飛行資料可透過兩種方式記錄,一個是飛控板記錄,另. 一個是地面站記錄。飛控板記錄被儲存在飛控板的快閃記憶體 (flash memory) 內, 在其開機完成後即開始記錄,可在飛行完畢後進行下載,地面站記錄則是飛控板 透過無線傳輸模組,在飛行過程中傳回地面站,再被儲存在地面站裝置上的記錄。 地面站記錄由於是經由無線電波傳輸回地面站,當無線電訊號接收不良或飛行器 超出接收範圍時,會造成飛行資料的缺漏,相較之下,飛控板記錄由於是直接儲 存在飛控板上,缺漏的機率較小,所以本研究選擇使用飛控板記錄來進行分析。 ArduPlane 的飛控板飛行記錄的類別眾多,使用者可選擇要儲存哪些類別,飛 控系統會根據使用者的設定,儲存選取類別之記錄,而不同的記錄類別會有不同 的記錄頻率,本研究使用的記錄類別與欄位,如表 5 所示。. 31.
(42) 表 5 類別. GPS. ATT. CURR. 本研究使用的 ArduPlane 記錄類別與欄位 類別說明. 記錄頻率. 定位相關. 飛行姿態. 電力相關. 5hz. 10hz. 1hz. 欄位. 欄位說明. Lat. 緯度. Long. 經度. RelAlt. 氣壓高度. Spd. 對地速度. GCrs. 行進方位角. Roll. 滾轉角. Pitch. 俯仰角. Yaw. 偏航角. Volt. 供電電壓. Curr. 消耗電流. 本研究將撰寫程式對飛行記錄檔進行分析,以計算不同風向之路徑模式的六 項評估指標,而每種評估指標之衡量方法如下: 1) 空拍路徑之位置精準度 空拍路徑之位置精準度以 GPS 記錄類別內每一個位置點之航跡偏差 (cross-track error) 為基礎來計算,以圖 9 說明,UAV 當時所在位置 p 點 與當時的目標路徑之垂直距離 d,即為 UAV 在 p 點的航跡偏差。GPS 的 記錄頻率為 5hz,也就是每秒記錄五個位置點,將每種路徑模式所屬範圍 內的所有位置點取出,並計算每一點位的航跡偏差,再對這些航跡偏差 取均方根誤差 (root mean squared error; RMSE) 作為衡量值,位置精準度 衡量值 D 之計算公式為: ∑𝑛 𝑑𝑖 2 𝐷 = � 𝑖=1 𝑛. 其中 n 為該路徑模式的統計點位之數量,di 為每個統計點位之航跡偏差, D 越小代表位置精準度越高。 空拍影像通常只採用航帶上的拍攝影像,在兩航帶之間的銜接路徑 只作銜接功能,通常不規劃拍攝或不採用,且此時 UAV 正在迴轉,以進 32.
(43) 入下一航帶,迴轉時 UAV 的滾轉角較大,拍攝影像的傾斜位移也會較大, 不適合採用,故上述統計點位為每種模式的所有點位扣除兩航帶之間的 銜接路徑與迴轉範圍之點位。 2) 空拍路徑之高度維持 ArduPlane 飛控系統的高度資訊主要由氣壓感測器提供,氣壓感測器 偵測出當時所在高度的氣壓值,再與起飛前測得的氣壓值相減,求得與 起飛高度的氣壓差,再換算成高度差,也就是 UAV 當時位置與起飛位置 的高度差。 高度維持衡量值 H 之計算方式與位置精準度相同,以 GPS 記錄類別 內每一個位置點之高度誤差為基礎來計算,取出每個路徑模式中扣除兩 航帶之間的銜接路徑與迴轉範圍的所有點位,然後計算每個點位的高度 與目標高度之差,再取均方根誤差成為最後的衡量值,計算公式為: ∑𝑛 ℎ𝑖 2 𝐻 = � 𝑖=1 𝑛. 其中 n 為該路徑模式的統計點位之數量,hi 為每個統計點位的高度與目標 高度之差,H 越小代表高度維持精準度越高。 3) 空拍路徑之飛行姿態 飛機的飛行姿態也就是飛機目前姿態相對於三個空間軸的旋轉角度, 如圖 25 所示,以飛機的橫軸為中心旋轉的角度稱為俯仰角 (pitch),由升 降舵控制;以飛機的縱軸為中心旋轉的角度稱為滾轉角 (roll),由副翼控 制;以飛機的垂直軸為中心旋轉的角度稱為偏航角 (yaw),由方向舵控 制。. 33.
(44) 圖 25. 飛行姿態示意圖. 資料來源:FAA [7] ArduPlane 飛 控 系 統 的 飛 行 姿 態 資 訊 由 慣 性 感 測 元 件 (inertial measurement unit; IMU) 提供,慣性感測元件包含三軸加速度感測器 (accelerometer) 、 三 軸 陀 螺 儀. (gyroscope) 以 及 三 軸 地 磁 感 應 器. (magnetometer),其俯仰角的輸出值代表 UAV 飛控板與水平面之間的前後 俯仰角度差,後仰(爬升)時為正值,前傾(高度下降)時為負值;滾 轉角的輸出值代表 UAV 飛控板與水平面之間的左右傾斜角度差,右傾時 為正值,左傾為負值;偏航角的輸出值代表 UAV 的機頭方位,數值範圍 為 0 至 359.99 度,0 度代表機頭朝北,90 度代表機頭朝東,以此類推。 UAV 機身的俯仰角及滾轉角會直接影響空拍相機的水平,所以俯仰 及滾轉的角度值可以直接代表傾斜率而進行衡量,但偏航角則僅在飛機 之偏航角與行進方向不一致時,才會影響影像之側向重疊率,故取偏航 角與行進方位角的角度差來進行衡量,此角稱為側航角。 必須特別說明的是,俯仰角與滾轉角的輸出數值為飛控板與水平面 之間的角度差,而非 UAV 本身與水平面之間的角度差,而由於本研究在 實作技術上的限制,飛控板在安裝上較難完全與機身平面平行,後續的 機身平面之水平校正亦難以校正至百分之百水平,故飛控板輸出之俯仰 角及滾轉角與 UAV 機身真實的俯仰角及滾轉角之間,存在些許的誤差。 也就是說,當 UAV 機身保持理想水平時,飛控板輸出之俯仰角及滾轉角 可能不為 0 度。為了解決此一誤差造成的衡量偏差,本研究以全部 16 條 航帶上所有點位,扣除兩航帶之間的銜接路徑與迴轉範圍之點位,取出 34.
(45) 有效點位來計算俯仰角及滾轉角的平均值,以此平均值作為俯仰角及滾 轉角的衡量值之基礎參考點,以下簡稱俯仰角基準值與滾轉角基準值。 飛行姿態的衡量值包含俯仰角衡量值、滾轉角衡量值及側航角衡量 值,亦是以均方根誤差計算,其中俯仰角及滾轉角的偏差量為俯仰角及 滾轉角與其基準值之差。從飛行記錄檔取出每個路徑模式中扣除兩航帶 之間的銜接路徑與迴轉範圍的所有點位後,分別對俯仰角偏差量、滾轉 角偏差量以及側航角取均方根誤差,對三種飛行姿態進行衡量。俯仰角 衡量值 P 之計算公式為: ∑𝑛𝑖=1 𝑝𝑖 2 � 𝑃= 𝑛. 其中 n 為該路徑模式的統計點位之數量,pi 為每個統計點位的俯仰角偏差 量,也就是該點的俯仰角與俯仰角基準值之差,P 越小代表前後傾斜程度 越小。滾轉角衡量值 R 之計算公式為: ∑𝑛𝑖=1 𝑟𝑖 2 � 𝑅= 𝑛. 其中 n 為該路徑模式的統計點位之數量,ri 為每個統計點位的滾轉角偏差 量,即該點滾轉角與滾轉角基準值之差,R 越小代表左右傾斜程度越小。 側航角衡量值 C 之計算公式為: ∑𝑛𝑖=1 𝑐𝑖 2 � 𝐶= 𝑛. 其中 n 為該路徑模式的統計點位之數量,ci 為每個統計點位的側航角,即 偏航角與行進方位角的角度差,C 越小代表側飛程度越小。 4) 空拍路徑之飛行速度 飛行速度指的是 UAV 的對地速度,主要由 GPS 接收器提供,飛行速 度會影響空拍影像的前後重疊率,在固定的飛行高度與連拍時間間隔下, 飛行速度變快,會使影像前後重疊率變小,飛行速度變慢,則影像前後 重疊率變大。另外飛行速度會影響空拍相機的最低快門時間,飛行速度 越快,須搭配越低的快門時間,也就是越高速的快門,以避免拍出模糊 的相片。 35.
(46) 實驗飛行的飛行速度是由 UAV 控制,亦受風的影響,在扣除兩航帶 之間的銜接路徑與迴轉範圍之後,針對飛行速度的平均值、標準差、最 大值及最小值進行衡量。 5) 空拍行程之總耗電量 由於每個路徑模式的目標路徑長度相等,總耗電量越小代表該路徑 模式越省電,也就代表在相同的能源消耗之下,以該路徑模式飛行,可 以飛得比較遠、空拍的涵蓋範圍較大。 由焦耳定律與歐姆定律可得知: 電功率 = 供電電壓 × 消耗電流. 其中供電電壓的單位為伏特,消耗電流之單位為安培,而電功率單位為 瓦特,指的是每小時消耗的能量。 總耗電量的衡量將針對每種路徑模式的整個行程進行計算,而不扣 除兩航帶之間的銜接路徑與迴轉範圍,因為銜接路徑與迴轉範圍也是整 個行程之一,也會耗電,需包含進來計算。耗電量的計算,將由 CURR 記錄類別內取出每個點位的供電電壓與消耗電流,CURR 類別是每秒記 錄一次,由每個點位的供電電壓與消耗電流相乘,可算出那一秒的電功 率,由於電功率指的是每小時消耗的瓦特數,故該秒消耗的能量為電功 率除以 3600 秒,而總行程之耗電量也就是把該行程內的所有點位之耗電 量相加,故每種路徑模式的空拍行程總耗電量(單位為瓦特)之計算公 式為: 𝑊=. ∑𝑛𝑘=1(𝑉𝑘 𝐼𝑘 ) 3600. 其中 n 為該路徑模式的所有點位之數量,Vk 為每個點位的供電電壓(單 位為伏特),Ik 為每個點位的消耗電流(單位為安培)。 6) 空拍行程之總飛行時間 計算每種路徑模式的空拍行程總時間,可以得知哪一種模式可以最 快執行完畢,當飛行時間受限時,即可選用該模式飛行。空拍行程總時 間之計算方法為:取出飛行記錄檔內每種路徑模式的起始與結束時間, 將其相減即可求得每種模式的總飛行時間。. 36.
(47) 第4章. 實驗與評估. 本章將詳述實驗的過程與結果,包含進行實驗用 UAV 之路徑跟隨參數調整、 實地飛行實驗、取出飛行記錄檔進行分析並計算衡量值、評估實驗飛行時之風向, 最後對各項衡量值進行評估並提出飛行路徑建議。. 4.1. UAV之路徑跟隨參數調整 UAV 之路徑跟隨參數關係到 UAV 跟隨目標路徑飛行的精準度與效能,本研究. 使用的 ArduPlane 自動飛行系統之路徑跟隨調整參數為 T (NAVL1_PERIOD) 與ζ (NAVL1_DAMPING),必須先以試誤法對實驗用小型無人定翼機進行試飛,調整 這兩個參數至合理範圍,以取得合理的路徑跟隨效能。ArduPlane 3.2.3 的 T 參數之 預設值為 25 秒,ζ參數之預設比例為 0.75,其中 T 參數的調整對於飛行軌跡的精 準度與效能具關鍵影響性,較大的 T 值會有較溫和的導航,表現於飛行軌跡上即 是較大的迴轉半徑,當 T 值太大時會產生轉向不足的狀況,造成 UAV 無法跟隨目 標路徑飛行;而較小的 T 值有較積極的導航,也就是較小的迴轉半徑,當 T 值太 小時會有轉向過度的情狀發生,會造成轉彎轉太快,然後再反向轉彎以修正回目 標路徑的狀況。本研究主要針對 T 參數進行調整,ζ參數則使用其預設值 0.75, 而另外有一個非路徑跟隨參數 WP_RADIUS,亦會影響飛行軌跡,該參數用來設 定航點半徑,當 UAV 到達以目標航點為圓心、以 WP_RADIUS 為半徑的圓之範圍 內,即視為到達該航點,根據 [15],航點半徑 WP_RADIUS 建議設為 UAV 巡航速 度的兩倍,本實驗使用的 UAV 在非順、逆風狀態下之巡航速度約為每秒 13 至 15 公尺,故將航點半徑設為 30 公尺。 在ζ與 WP_RADIUS 參數固定的狀態之下(分別為 0.75 與 30 公尺),調整 T 參數,以試誤法進行試飛,由預設值 T = 25 開始試飛,目標路徑使用本研究實地 飛行實驗之目標路徑,T = 25 之試飛軌跡如圖 26 的黃色軌跡,相對於圖中的白色 目標路徑,其導航積極度不足、轉彎半徑太大。將 T 參數減少至 20,進行第二次 試飛,T = 20 之試飛軌跡如圖 26 的橘色軌跡,迴轉半徑縮小了,飛行軌跡之航跡 偏差縮小了。接著將 T 參數減少至 18,進行第三次試飛,T = 18 之試飛軌跡如圖 26 的紫色軌跡,航跡偏差比 T = 20 之軌跡更小,但有些轉彎處,UAV 的滾轉角超過 37.
(48) 本研究訂定的安全值 45 度,基於安全性,T 參數不再調小,將 T 值往回加,設定 T = 19,進行第四次試飛,T = 19 之試飛軌跡如圖 26 的紅色軌跡,其航跡偏差略 大於 T = 18 之軌跡,但轉彎時的滾轉角皆小於 45 度,故選定 T 參數為 19 秒。 此步驟以試誤法試飛,對實驗用 UAV 之路徑跟隨調整參數進行調整,訂出了 以下參數的數值:T (NAVL1_PERIOD) = 19 秒,ζ(NAVL1_DAMPING) = 0.75, WP_RADIUS = 30 公尺。. 圖 26. 以試誤法進行實驗用 UAV 路徑跟隨參數 T 調整之試飛軌跡. 38.
(49) 4.2. 實地飛行實驗 完成實驗用 UAV 之路徑跟隨參數調整之後,便可進行實地飛行實驗,實驗當. 天地面體感風向為西風,實驗場域為高雄大學附近區域,位於高雄市楠梓區,參 考行政院環保署空氣品質監測網的楠梓測站之風速與風向資料,在進行實驗的該 小時(2015 年 5 月 3 日下午 15 時)之平均風速為每秒 3.2 公尺,平均風向方位角 為 270 度,也就是正西風,如圖 27。. 圖 27. 實驗當天環保署楠梓測站的每小時平均風速與風向參考資料 資料來源:行政院環保署空氣品質監測網. 將目標路徑腳本上傳至飛控板,並確認 UAV 的副翼、升降舵與方向舵等操控 翼片運作正常、機上感測器數值正常、GPS 接收衛星數目八顆以上、GPS 誤差因 子 2.0 以下以及其他狀態均正常後,正式起飛進行實驗。實地飛行實驗的起飛階段 由操作人員以遙控器手動操作,到達安全高度 30 公尺後,再切換至自動飛行模式, 依目標路徑自動飛行,目標路徑執行完畢後,再由操作人員切回手動模式將其降 落。實地飛行實驗之自動飛行模式的飛行軌跡如圖 28 之紅色軌跡,白色的線條則 為目標路徑,總計自動飛行之軌跡總長 21.5 公里,自動飛行之總花費時間為 21 分 26 秒。. 39.
(50) 圖 28. 4.3. 實地飛行實驗之自動飛行模式的飛行軌跡. 分析飛行記錄檔 實地飛行實驗完成之後,取出飛控板上的飛行記錄檔進行分析,由於記錄檔. 內包含四種不同的風向模式,必須先界定每種模式的起始與結束點、去除模式間 的銜間軌跡之點位,並根據不同的記錄類別,去除或保留航帶間的銜接路徑與迴 轉範圍之點位。以順逆風側向 b 模式之電力相關類別(記錄頻率 1hz)與定位相關 類別(記錄頻率 5hz)為例,若迴轉範圍訂為 30 公尺,則分析處理過後,應該列 入計算的有效點位分別如圖 29 與圖 30 所示,電力相關類別的有效點位包含航帶 間的銜接路徑與迴轉範圍之點位,其記錄頻率為 1hz,故每秒會有一個點位,如圖 29 中的白點;定位相關類別的有效點位則不包含該範圍之點位,其記錄頻率為 5hz, 40.
(51) 所以每秒 0.2 秒就會有一個點位,每秒有 5 個點位,如圖 30 中的白點。. 圖 29. 圖 30. 順逆風側向 b 模式的電力相關類別(記錄頻率 1hz)之有效點位. 順逆風側向 b 模式的定位相關類別(記錄頻率 5hz)在迴轉範圍 30 公尺 下之有效點位. 上述的迴轉範圍 30 公尺,指的是每條航帶從起始航點開始往結束航點方向計 算的那 30 公尺,以圖 30 為例,由航點 39 與航點 40 構成的航帶(以下簡稱航帶 39-40)之迴轉範圍為圖中由航點 39 起始的黃色方框,長度 30 公尺,而航帶 41-42 之迴轉範圍則為圖中由航點 41 起始的黃色方框,以此類推。每條航帶的迴轉範圍 正值 UAV 由前一航帶經由銜接路徑要開始此一航帶的迴轉過程,此時 UAV 正在 轉彎,其滾轉角通常較大,空拍影像的傾斜位移也會較大,此範圍拍攝的影像一 般不會採用,本研究的位置精準度、高度維持、飛行姿態與飛行速度四個衡量值 41.
數據
![圖 4 影像前後重疊率與側向重疊率示意圖 資料來源: Xiang and Tian [9]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/17.892.262.635.371.730/圖4影像前後重疊率與側向重疊率示意圖資料來源XiangandTian9.webp)
![圖 5 正射影像鑲嵌合成 資料來源: Mozas-Calvache et al. [10] 正射影像圖的精確程度與影像品質受以下因素影響: 1) 影像重疊率是否足夠 充足的影像重疊率是製作良好正射影像圖的必要條件,在 UAV 依照理想 規劃路徑飛行且飛行姿態在理想狀態的前提之下,影像前後重疊率與飛 行高度、飛行速度及相機連拍時間間隔有關,側向重疊率則與空拍路徑 的航帶間距相關。飛行速度主要與 UAV 性能有關,連拍時間間隔則與相 機的規格相關,在規劃空拍路徑時,必須考量此二因素以及要達成的影 像](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/18.892.301.593.121.437/度飛行速度及相機連拍時間間隔有關側向重疊率則與空拍路間距像.webp)
![圖 11 胡蘿蔔追逐演算法之δ參數調整 資料來源: Sujit et al. [11] 前述之空速 (airspeed) 是指 UAV 飛行時相對於周圍空氣運動的速度, 也就是把風速的影響去除後之對地速度,或是無風狀態下的對地速度。 當 UAV 逆風飛行時,空速為 UAV 之對地速度加上風速,順風時則為對 地速度減掉風速。在相同的對地速度之下,逆風時之空速比順風時高, 而定翼 UAV 的空速與其因白努利原理產生的升力成正比,所以在順風時 的對地速度要比逆風時更快,才能取得與逆風時一樣的升力。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/25.892.294.673.128.414/前述之度減掉風速在相同對地速度之下逆風時之空速風時時一樣升力.webp)
![圖 12 非線性導引律 (a) 虛擬目標點及 L 參數 (b) L 參數調整 資料來源: Sujit et al. [11]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/26.892.204.764.128.392/圖1非線性導引律虛擬目標點及參數bL參數調整資料來源Sujitetal1.webp)
+7
![圖 16 LQR 演算法之 q 22 參數調整 資料來源: Sujit et al. [11] 2.2 路徑跟隨演算法之效能比較 在 [11] 研究中,作者們對以上五種路徑跟隨演算法進行了比較,然而因為五 種演算法的調整參數均不同,為了確保公平性,先以模擬軟體對每一種演算法求 出其最佳之調整參數,再以每種演算法的最佳參數來進行五種演算法之模擬飛行 比較。該研究使用花費之總驅動力 (total control effort) 與總航跡偏差 (total cross-track er](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/29.892.299.668.128.411/因為種演算法調整參數均不同為了確保公平性先以軟體飛行比較該研.webp)
![圖 17 五種路徑跟隨演算法之效能比較 資料來源: Sujit et al. [11] 雖然模擬結果顯示向量場演算法的效能最好,但其最佳參數調整並不容易, 有四個參數要隨 UAV 機型的不同而進行調整,相對而言,非線性導引律雖然效能 比向量場演算法低一些,但只需調整一個參數,相對簡單。表 3 列出以模擬飛行 求出的五種路徑跟隨演算法之直線路徑最佳參數、優點及限制。 表 3 五種路徑跟隨演算法之直線路徑最佳參數、優點及限制 資料來源: Sujit et al](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/30.892.214.685.123.516/五種路然效比向量場演算法低一些但只需調整一個參數相五種路算法.webp)
![圖 18 ArduPlane 之直線路徑跟隨演算法 資料來源: ArduPilot Dev Team [15]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8791457.220422/32.892.136.756.132.830/圖18ArduPlane之直線路徑跟隨演算法資料來源ArduPilotDevTeam15.webp)
相關文件
IRB 編號 CE18097A 計畫主持人 陳呈旭 計畫名稱 高風險個案相關醫療人員短期及長期心理壓力之評估研究 審查意見
名稱 功能性評估重點 評估工具/方式 預估評 估時間
1、由各評選委員就評選項目及權重,填寫評選表一份(如附表三 之一、三之二、三之三及三之四)
在選擇合 適的策略 解決 數學問題 時,能與 別人溝通 、磋商及 作出 協調(例 如在解決 幾何問題 時在演繹 法或 分析法之 間進行選 擇,以及 與小組成 員商 討統計研
就學與就業之職能 治療暨實習、職業 輔導評量學暨實 習、職業復健暨實 習、職能評估與職 業復健暨實習、職 業輔導評量專題研 究、職業輔導評量
Towards a model apprenticeship framework: A comparative analysis of national apprenticeship systems. Globalization and new industrial organization: Implication for
在選擇合 適的策略 解決 數學問題 時,能與 別人溝通 、磋商及 作出 協調(例 如在解決 幾何問題 時在演繹 法或 分析法之 間進行選 擇,以及 與小組成 員商 討統計研
「 「小學中國語文評估系列 小學中國語文評估系列 小學中國語文評估系列 小學中國語文評估系列: : :課堂追問 : 課堂追問 課堂追問 課堂追問」 」 」 」研討會
