國立交通大學
土木工程研究所
碩士論文
以基底展開法識別多自由度時變系統之
瞬時模態參數
Identification of instantaneous modal parameters of a MDOF time
varying structure via a basis expansion technique
研究生:王政淵
指導教授:黃炯憲博士
以基底展開法識別多自由度時變系統之
瞬時模態參數
Identification of instantaneous modal parameters of a MDOF time
varying structure via a basis expansion technique
研 究 生:王政淵 Student:Cheng-Yuan Wang 指導教授:黃炯憲 Advisor:Chiung-Shiann Huang 國 立 交 通 大 學 土 木 工 程 研 究 所 碩 士 論 文 A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
September 2009
Hsinchu, Taiwan, Republic of China 中華民國九十八年十月
以基底展開法識別多自由度時變系統之瞬時模態參數
研究生:王政淵 指導教授:黃炯憲 博士
國立交通大學土木工程學系碩士班 摘要
本研究為利用移動最小平方差法(Moving Least Square method,MLS)從 時 變 系 統 之 動 態 位 移 反 應 架 構 TVARX(time-varying autoregressive with exogenous input model)模型,利用識別之時變係數直接估算瞬時模態參數。
透過三層樓剪力構架模擬之數值反應驗證可行性,接著考慮各種參數 如節點數(ln)、指數權重函數之影響半徑(dm)、TVARX 之模型階數(I,J)與雜 訊之干擾等對識別結果之影響。進一步應用於分析五層樓鋼構與六層樓鋼 構之振動台試驗等實測資料,識別其瞬時模態特性。識別結果與試驗觀察 到之物理現象一致。 本研究亦提出以不同自由度所構成之子結構系統,建立 TVARX 模型, 透過子結構系統之瞬時擬自然振動頻率可得知哪一自由度(或哪一層樓)可 能損傷。
Identification of instantaneous modal parameters of a MDOF time
varying structure via a basis expansion technique
Student: Cheng-Yuan Wang Adviser: Prof. Chiung-Shiann Huang
Department of Civil Engineering National Chiao-Tung University
Abstract
This study applies moving least square method (MLS) to construct the time varying autoregressive with exgenous input model (TVARX) for a structure from its dynamic displacement responses and further estimates the instantaneous model parameters of the structure from the time varying coefficients of TVARX model.
Through the three-story shear structure of the numerical simulations verify the feasibility of reaction.The parameters under investigation include the order of TVARX model,nodal point,support length of exponential weighting function,and noise.The proposed approach is also employed to obtain the modal parameters of five-story steel frames and six-story frames from their measured displacement responses in shaking table tests.
This study also proposes to freedom posed by the different sub-structure system, the creation TVARX model, through the sub-structure system, the natural vibration frequency of the transient to be able to know which degrees of freedom (or what floor) may be damage.
誌謝
本文承蒙恩師 黃炯憲博士悉心指導與不厭其煩的校正,方得以順利完 成。吾師治學態度嚴謹,待人處世溫和謙恭,使我在兩年多的求學期間, 在學業與處世態度獲益匪淺,在此致最由衷之謝忱。 文稿之初,承蒙洪士林教授、鄭復平副教授與林昌佑副教授的詳細審 閱,多方修正,提供許多寶貴的意見與批評,使本論文得以更加精確嚴謹, 感銘五內。 在研究所期間,特別感謝明儒與威智學長的耐心指導,在課業與研究 上給予極大幫助。且能與明儒學長、威智學長、勝彥學長、增尉學長、佳 穎學姐、政寧學長、志偉學長、仲維學長、靖俞學長、昱成學長、同窗榕 師、勵元、力郕、灝勳和羿廷以及學弟妹凱平、宛臻、嬿糧一起在生活和 課業中成長學習、相互激勵,使我在研究的路上不孤單。 最後感謝我的家人與摯愛文珮,有你們的支持與鼓勵,陪我經歷情緒 的起伏與低潮,給我許多慰藉和力量,感謝你們。目錄
摘要 ...I abstract... II 誌謝 ...III 目錄 ...IV 第一章 前言 ...1 1.1 文獻回顧 ... 2 1.2 研究目的以及方法 ... 5 1.3 論文架構 ... 6 第二章 以移動最小平方差法架構 TVARX 模式...7 2.1 前言 ... 7 2.2 以多項式為基底配合移動最小平方差法 ... 7 2.3 以 MLS 架構 TVARX 模型... 8 2.4 瞬時模態參數估算 ... 12 2.5 TVARX 與時變線性運動方程式之對等關係 ... 14 2.6 不完全量測自由度 ... 16 2.7 局部動態識別 ... 18 2.8 識別動態特性準確指標 ... 21 第三章 數值模擬驗證與參數探討 ...23 3.1 前言 ... 23 3.2 數值模型概述 ... 23 3.3 數值模擬驗證 ... 24 3.3.1 識別參數定義 ... 24 3.3.2 無雜訊反應之識別結果 ... 25 3.3.3 雜訊之影響 ... 26 3.4 局部動態識別 ... 29 第四章 應用於振動台試驗數據分析 ...32 4.1 前言 ... 32 4.2 五層樓鋼構架振動台試驗 ... 32 4.2.1 待測結構物介紹 ... 32 4.2.2 輸入之地震力 ... 33 4.2.3 線性反應之識別結果 ... 34 4.2.4 非線性反應之識別結果 ... 35 4.2.5 五層樓鋼構架之局部動態識別 ... 36 4.3 六層樓鋼構架振動台試驗 ... 38 4.3.1 待測結構物介紹 ... 38 4.3.2 輸入之地震力 ... 394.3.3 整體構架實測資料之識別結果 ... 40 4.3.4 六層樓鋼構架之局部動態識別 ... 43 第五章 結論與建議 ...45 5.1 結論 ... 45 5.2 建議 ... 46 參考文獻 ...47
第一章 前言
台灣位處環太平洋地震帶上,由於板塊碰撞及隱沒,地震發生極為激 烈頻繁,有許多結構物受到地震造成損壞或崩塌。因此,結構工程師除了 持續在建築物之材料強度以及建築物功能性持續發展研究,也逐漸重視結 構物健康檢測。但是土木結構系統龐大與繁雜,而且現地施工品質不易掌 握,所以藉由現地量測資料識別結構物動態特性是非常重要地。 為了避免結構物受到地震造成破壞倒塌,在建築法規上以韌性設計來 抵抗地震力。尤其以 921 大地震之後,加速隔減震裝置廣泛地用於補強或 修復舊有結構物,以及新結構物之設計。許多半主動控制元件(如半主動 控制磁流變消能器、電流變阻尼器、蓄壓式油壓半主動減震器、半主動摩 擦阻尼器等)亦相繼被研發與應用。若將此類半主動控制元件裝置於結構 物上,則該結構系統之勁度或阻尼於地震中將隨時間而改變,此即為系統 識別領域中所稱之時變系統。在此類工程應用問題中,若能透過系統識別 技巧識別該結構系統隨時間改變之動態特性或建立起完整之非線性模型, 將有助於檢驗半主動控制元件等非線性元件應用於結構物之設計,及評估 結構系統之健康情況。若結構系統於地震中展現材料非線性行為,亦可被 視為一時變系統。若能透過系統識別估算該系統隨時間改變之動態特性, 則有助於吾人了解該結構系統產生非線性行為對整體動態行為之影響。因此,可知發展一準確且有效率之時變系統識別技巧於土木工程應用之重要 性。 以下將分別對線性系統以及時變系統所使用之分析方法做簡單之回 顧,並且對研究中所使用之理論背景與應用領域做個介紹。
1.1
文獻回顧
識別時變系統可分為非參數法與參數法。非參數法將反應訊號視為一 非穩態(nonstationary)訊號,利用時間和頻率表示法來識別頻率隨時間改變 之特性,例如利用短時傅利葉轉換法 (STFT) (Cohen, 1989)、Wigner-Ville distribution (WVD) (Cohen, 1989;Martin and Flandrin, 1985)、Choi-Williams distribution (CWD) (Choi and Williams, 1989) 、 adaptive optimal kernel distribution (AOKD) (Jones and Baraniuk, 1995)、Huang-Hilbert transformation (Huang et al., 1998; Yang et al., 2003)以及小波轉換 (Qian, 2002; Kijewski and Kareem, 2003)等。通常此類方法大部分只能適用於結構系統無外力之反應 訊號(例如自由振動反應)分析,識別結構系統之瞬時擬自然振動頻率或 阻尼。但於識別模態有其困難性。另外,此類方法如同非時變系統於頻率 域分析技巧,其識別頻率解析度不是很高,對互相干擾嚴重之模態不易識 別。時變參數法提供了簡潔且高解析度之方法,並被廣泛地被應用至工 程問題。以下介紹以基底函數展開技巧之時變參數法。 基底函數展開技巧其基本觀念為對每一個時變系統參數,利用基底函 數展開,再以最小平方差法,計算每一基底函數之係數。以此估算各基底 函數對應之係數將不隨時間改變。利用基底函數最主要之目地,乃是考慮 減少所須之資料量以獲得必須之時變係數。但是基底函數展開之方式對於 波型變化過於劇烈且歷時過於短暫之資料,仍然無法有效進行識別。有幾 種 基 底 函 數 常 被 使 用 , 包 括 傅 利 葉 序 列(Marmarelis, 1987) 、 Legendre
Polynomials (Zou et al., 2002)、Walsh function (Zou et al., 2002)、以及小波 (Tsatsanis and Giannakis, 1993)。此類方法之優劣與選擇基底函數之次空間延
伸有很大的相關。Zou(2003)透過數值模擬發現 Legendre Polynomials 可準確
模 擬 平 滑 變 化 之 時 變 曲 線 ,Walsh function 則 對 片 段 穩 態 (piece-wise
stationary)之時變係數有較好之模擬結果。一般而言,基底函數展開法須引 入較多之基底函數,而過多之基底函數易造成數值困難,特別是多項式基 底。 為了透過TVARX 模式直接估算系統之瞬時模態特性,須透過結構系統 之反應,發展出有效率建構TVARX 模型之方法。研究中將以移動最小平方 差法(Liu, 2003)以架構 TVARX 模型中之時變係數,並證明以位移反應架構
之TVARX 模式方能準確估算系統之瞬時模態參數。
以移動最小平方差法架構TVARX 模式,須選擇一系列之基底函數對時
變係數進行展開。根據函數近似理論可知,任一函數均可透過具完備特性
(complete set)之基底函數展開 Watson(1980)。多項式函數為一眾所周知
於有限區間內具完備特性之函數。因此,研究中將選用多項式函數對時變 係數展開。 在蘇(2008)得知,以基底展開法識別單自由度時變系統之瞬時模態參數 是可行地,能以較少之基底函數準確識別平緩變化、週期變化與折線變化 等時變系統;但是對於不連續之跳躍時變系統無法準確識別。本研究將此 單自由度之識別推廣至多自由度之識別,並進一步將識別流程應用在實測 資料上。 大多現有結構如高樓結構物,受到地震而損害。若再次受地震侵襲, 而損害未被檢測,可能會造成結構物發生災難性的破壞。結構物經由強烈 地震損害而改變結構物之物理特性。Udwadia 和 Jerath(1980)與 Carydis 和 Mouzakis(1986)觀察樓層發生勁度下降,試圖將樓層勁度下降與損害之關係
連結。自1980 年以來,在結構損害評估之系統識別和結構動力反應之量測,
受到很多研究人員的注意(Toussi and Yao, 1982; Banon and Veneziano, 1982; Lin et al., 1990)。吳 等人(2001)提出透過上層結構所紀錄的地震反應,利用
推導出輸入與輸出之關係,評估其動態特性。研究中將識別子結構系統並 討論其動態特性。
1.2 研究目的以及方法
台灣處於地震頻繁之地震帶上,因此當結構系統受到小地震時,表現 出線性行為,而遇到大地震時,結構系統受到破壞表現出非線性行為,此 非線性行為使得結構系統特性隨著時間改變。所以可藉由結構系統之地震 反應識別隨時間改變之趨勢,來判斷該結構是否健康。 本研究旨在擴展並改善 Huang 等人(2003)所提出之識別方法,並將 蘇(2008)之識別方法由單自由度系統推廣至多自由度系統,時變系統中之時 變係數,乃利用移動最小平方差法結合各種基底函數以架構時變係數之形 狀函數,各基底對應之係數將隨時間改變;而前人所用傳統基底函數展開 法所得之係數則是不隨時間改變。因此,相信本研究所研發之時變系統識 別程序當比前人所提者更能準確抓住時變系統之時變特性。 研究中將針對不同自由度所構成子結構系統,建立TVARX 模型,試圖 識別哪一自由度具時變物理性質,並探討TVARX 之模型階數(I,J)、指數權 重函數之影響半徑(dm)、節點數(ln)與雜訊等參數對識別結果之影響。對此 些方法參數之選用可供未來使用者參考之依據。1.3 論文架構
本論文共有五章,其內容如下: 第一章 前言。主要內容為研究動機與背景;前人研究方法與成果之相關 文獻介紹;並闡數本論文之研究方法與架構。 第二章 利用移動最小平方差法於線性時變系統識別。其主要內容為介紹 移動最小平方差法架構 TVARX 模型之方法;TVARX 與運動方程 式對等關係之推導;以子結構觀念建構局部動態識別之推導。 第三章 以多項式基底架構 TVARX 模式進行數值模擬。其內容以多自由度 時變系統之模擬反應驗證所提方法之適用性;探討不同參數對識別 結果之影響;驗證局部動態識別之可行性。 第四章 將本研究之識別方法應用於五層樓鋼構架與六層樓鋼構架之振動 台試驗數據分析。 第五章 結論與建議。主要總結此研究之分析結果。第二章 以移動最小平方差法架構 TVARX 模式
2.1 前言
本章主要是介紹以移動最小平方差法( Moving Least Square method, MLS )來架構 TVARX( time varying autoregressive with exogenous input )模 型,以識別線性時變系統之瞬時模態特性。此方法主要是透過量測之輸入 與輸出反應架構TVARX 模型,以移動最小平方差法求得 TVARX 模型之參 數,再進一步估算時變系統之瞬時模態參數。2.2 節介紹移動最小平方差法。 2.3 節利用移動最小平方差法架構 TVARX 模型的方法。2.4 節介紹瞬時模態 參數之估算方法。2.5 節利用中央差分法將時變運動方程式展開,以推導 TVARX 與運動方程式之對等關係。2.6 節介紹不完全自由度量測。2.7 節為 推導局部動態識別之運動方程式。2.8 節介紹識別動態特性準確指標。
2.2
以多項式為基底配合移動最小平方差法
本節將介紹以移動最小平方差法(MLS)(Liu, 2003)架構 TVARX 模型的 方法。移動最小平方差法將TVARX 之時變係數以基底函數展開後,先利用 權重平方差估算各個節點(nodal points)之形狀函數,接著再以傳統最小平方 差法反算各個形狀函數對應之係數。此方法能以較少之基底展開,且計算 過程較為省時。 以移動最小平方差法基底函數技巧建立TVARX 模式時,將 TVARX 之 係數函數以選定基底函數展開。在傳統之基底函數展開法長用之基底函數之種類包括有 Walsh 函數( Zou et. al,2003 ),傅利葉級數( Marmarelis, 1987 ),Legendre polynomials ( Niedwiecki, 2000 ),小波函數( Tsatsanis and Giannakis, 1993 )等,。本章則利用多項式函數,並配合移動最小平方差法, 取最高冪次為 2 即[1 2] t t ,並考慮指數權重函數之影響半徑(dm),以求取 函數展開之係數。由於多項式函數是一種平滑函數,對於平滑變化之時變 係數其識別效果較佳。
2.3 以 MLS 架構 TVARX 模型
時變ARX( TVARX(I,J) )模式定義為( )
t( ) ( )
t t i( ) (
t t j)
( )
t J j j I i i y Θ f an Φ y =∑
− +∑
− + = =1 0 , (2.1) 其中,y t i( − )是在t−iΔt時刻下量得之反應向量; f(t− j)是在t−iΔt量得之外 力輸入向量;Φi(t)和Θj(t)為待測之時變係數矩陣;an(t)為誤差向量,由於 量測噪訊或模型誤差所造成。TVARX 通常被應用於架構時變線性系統或非 線性系統之輸入與輸出關係。當利用 TVARX 模式建構一非線性系統之輸 入及輸出時;即是將與位移或速度反應相關之系統特性(勁度或阻尼,為時 間之隱函數)以一等價之時間顯函數替代。 多自由度時變線性系統之反應,以移動最小平方差法架構 TVARX 模 式。TVARX 模型中之係數函數以多項式基底函數展開,可以矩陣型式表示 得( )
i i Ni n n n i i t A t A P Φ ~ 0 ˆ ˆ ˆ = =∑
= , (2.2a)( )
j j N n n n j j j t t B B T Θ ~ 0 ˆ ˆ ˆ = =∑
= , (2.2b) 其中[ ] [ ] [ ]
[ ]
[
]
T I I I I P Ni i t t t 2 = , (2.3a)[ ] [ ] [ ]
[ ]
[
]
T I I I I T Nj j t t t 2 = , (2.3b)[
i i iNi]
i A A A A~ = 0 1 , (2.3c)[
j j jNj]
j B B B B~ = 0 1 , (2.3d) n i ˆ A 與Bj ˆn為待定係數矩陣,[ ]
I 為維度與係數矩陣一致之單位矩陣。式(2.3)中之待定係數Ai ˆn與Bj ˆn可以權重最小平方差法(weighted least square)進行
求解。令Φi
( )
tk 與Θj( )
tk 之真值分別為Φik與Θjk。待定係數可透過誤差函數最 小化求得。以求取式(2.2a)Φ之Ai為例,將誤差函數定義為( )
(
)
( )
(
)
1 ( ) T , ( ) E i A P Φ W A P Φ l i i l il l i i l il l t t t t t = =∑
− − , (2.4) 其中( )
,( )
,[ ]
W t tl =w t tl I ;li為描述Φi( )
t 上所取之節點總數,其值遠小於反應總取 樣點數。 使函數E最小化可得[ ]
0 AE = ∂ ∂ i ~ , (2.5) 將誤差函數代入上式;整理可得( )
t i i( )
t i iA ΦQ A~ = , (2.6) 其中( )
( ) ( ) ( )
1 , T A i P W P l i i l l i l l t t t t t = =∑
, (2.7a)( )
[
Q Q Q]
T Q i l i i i i t = 1 2 , (2.7b)( ) (
l n l)
i il P t Wt ,t Q = , (2.7c)[
i i il]
i Φ Φ Φ Φ = 1 2 , (2.7d) 則式中Ai ~ 之解為( ) ( )
t i t i i i 1 ~ =ΦQ A− A , (2.8) 上式所得之Ai ~ 為時間t之函數。將之代回式(2.6),整理可得( )
t i pi( )
t i , ~ Φ Φ Φ = , (2.9)( )
t i p, ~ Φ 類似有限元素中所稱之形狀函數(shape function)矩陣,( )
Q( ) ( ) ( )
A P T Φ~p,i t = i t i−1 t i t , (2.10) 同理,Θj( )
t 可用相同方式展開,表示成( )
t j p j( )
t j , ~ Θ Θ Θ = , (2.11) 其中[
j j jlj]
j Θ 1 Θ 2 Θ ˆ Θ = , (2.12a)( )
U( ) ( ) ( )
B T T Θ~p,j t = j t −j1 t j t , (2.12b)( )
ˆ( )
( ) ( )
1 , T B j T W T l j j l l j l l t t t t t = =∑
, (2.12c)( )
[
]
T U U U Uj t = j1 j2 ˆ , (2.12d)( ) ( )
, Ujl =Tj tl W t tl , (2.12e) j lˆ 為描述Θj( )
t 上所取之節點總數(假設θj( )t 中每一分量函數所取之節點總數 相同)。如果對 TVARX 模型中之各個時變係數取相同之結點數與相同之多 項式基底,則可簡化以上表示式。 在式(2.9)與式(2.11)中未知數為Φi和Θj,以最小平方差法對Φi和 j Θ 求解。其對應之誤差函數定義為( )
(
)
(
( )
)
∑
= = N n n n T n n t t 1 a a E , (2.13) 其中,N為用於分析之各自由度反應資料點數。由式(2.1)、(2.9)和(2.11)可 得( ) ( )
( ) ( )
( ) (
)
( )
( ) ( )
( ) (
)
( )
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − − =∑
∑
∑
∑
∑
∑
= = = = = = J j j t j I i i t i J j j p j I i i p i J j j I i i n t j t t i t t t j t t i t t t t 0 , 1 , 0 , 1 , 0 1 ~ ~ Ω Θ Γ Φ y f Θ Θ y Φ Φ y f Θ y Φ y a , (2.14) 其中(
)
(
)
(
)
, 1 , ,2 , , T T T Γ Φ y Φ y Φ y i T t i =⎣⎡ p,i, t−i p i t−i p i l t−i ⎤⎦ , (2.15a)(
)
(
)
ˆ(
)
, , ,1 , ,2 , , T T T Ω Θ f Θ f Θ f j T t j p j t j p j t j p j l t j ⎡ ⎤ =⎣ − − − ⎦ , (2.15b) 對未知數取導數可得:(
)
( )
, ,[ ]
1 1 0 2 E Φ y y Φ Γ Θ Ω 0 Φ N I J T i n n i t i j t j n i j i t i t = = = ⎛ ⎛ ⎞⎞ ∂ = − − + = ⎜ ⎜ ⎟⎟ ⎜ ⎟ ∂∑
⎝ ⎝∑
∑
⎠⎠ , (2.16a)(
)
( )
, ,[ ]
1 1 0 2 E Θ f y Φ Γ Θ Ω 0 Θ N I J T j n n i t i j t j n i j j t j t = = = ⎛ ⎛ ⎞⎞ ∂ = − − + = ⎜ ⎜ ⎟⎟ ⎜ ⎟ ∂∑
⎝ ⎝∑
∑
⎠⎠ , (2.16b) 將以上之聯立方程組以矩陣形式表式可得 m m m mF V V C VT = T , (2.17) 其中 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = J t t t I t t t J t t t I t t t J t t t I t t t m n n n n n n,1 ,2 , ,0 ,1 , , 1 , 0 , , 2 , 1 , , 1 , 0 , , 2 , 1 , 2 2 2 2 2 2 1 1 1 1 1 1 Ω Ω Ω Γ Γ Γ Ω Ω Ω Γ Γ Γ Ω Ω Ω Γ Γ Γ V … … ,( ) ( )
( )
[
]
T n t t t y y y F= 1 2 ,[
T]
T J T T T I T T m Φ Φ Φ Θ Θ Θ C = 1 2 0 1 , 對 (2.17)式求解即可得到每個節點之真值,代回式(2.9)即可得到此系統 於某個時刻t=tn下之時變係數Φi( )
tn 。2.4
瞬時模態參數估算
架構TVARX 之各個時變係數時,可考慮不同之多項式階數Ni與Nj以 及不同之節點數li與lˆj。於實際應用時若取相同之多項式階數以及相同之節 點數,(即令N1=N2 =NI =N0 =N1= =NJ =Np;l1=l2 =lI =lˆ0 =lˆ1= =lˆJ =ln), 則每個時變係數可使用相同之形狀函數,將可使運算過程更有效率。 TVARX 之通式如式(2.1)所示,在瞬時 t 下,Φi(t)與Θj(t)均為常數矩陣,模式估算動態特性之方法,令
[ ]
1 2 3 1 0 0 0 0 0 0 0 0 0 0 0 0 ( ) ( ) ( ) ( ) ( ) i i i i I I G I t − t − t − t t ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣Φ Φ Φ Φ Φ ⎦ , (2.18) 在時變系統[ ]
G 將隨時間而改變。[ ]
G 之特徵值及向量是與結構系統之瞬時動 態特性有直接關係。如同非時變系統之推導可知[ ]
GΨk = kΨk ~ ~ λ , (2.19) 其中Ψk ~ 及λk為[ ]
G 之第 k 特徵向量及特徵值。在時變系統中,Ψk ~ 及λk亦是 時間之函數。令 ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ Ψ Ψ Ψ = Ψ ) ( ) 2 ( ) 1 ( ~ ~ ~ ~ I k k k k , 其中,~(i) k Ψ 為一(l×1)之向量,l為量測自由度。由於[ ]
G 之特殊構造,可得 ) 1 ( ) ( ~ ~ = Ψ − Ψ i k k i k λ (i =1,2…,I), (2.20a) 且 ) ( 1 0 ) 1 ( ~ ~ ~ I k k I j j k j n Ψ = Ψ∑
− = + − λ ϕ , (2.20b) 從上式兩關係式(2.20a)及(2.20b)可得 ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ Ψ Ψ Ψ Ψ = Ψ −1 (1) ) 1 ( 2 ) 1 ( ) 1 ( ~ ~ ~ ~ ~ k I k k k k k k k λ λ λ , (2.21)及 (1) k Ψ 代表量測自由度之第k模態。 式(2.18)中之特徵值常為複數,成雙或成對之共軛根。令λk =ak +ibk, 則結構系統之瞬時擬自然振動頻率及阻尼比為 2 2 ~ k k k α β β = + , k k k β α ξ = ~ , (2.22) 其中 k k k a b t 1 tan 1 − Δ = β , ln( ) 2 1 2 2 k k k a b t + Δ = α , (2.23) t Δ 為時間增量(即取樣頻率之倒數)。通常βk ~ 亦稱為瞬時擬自然振動頻率 (instantaneous pseudo-undamped circular natural frequency)。
2.5
TVARX 與時變線性運動方程式之對等關係
多自由度時變線性系統之運動方程式為: ( ) ( )Μ xt t + C x( ) ( )t t + Κ x( ) ( )t t = f( )t, (2.24)
其中,M,C,K分別為該系統之質量,比例阻尼以及勁度,假設均為時 間函數;f t( )為外力向量;x t( ),x t( )及x t( )分別為位移,速度及加速度反應。 對式(2.24)無因次化得 ( )[ ] ( ) ( )[ ] ( ) ( )[ ] ( ) ( ) M t φ y t +C t φ y t +K t φ y t =f t , (2.25) 其中[ ]φ 為理論之特徵矩陣。將上式各項前乘以{ }
T i φ ,再以向量型式表示可 得{ }
TM( ){ }
( ){ }
TC( ){ }
( ){ }
T K( ){ }
( ){ }
Tf( ) i t i y ti + i t i y ti + i t i y ti = i t φ φ φ φ φ φ φ , (2.26) 其中{ }
T i φ 為第i振態之轉置向量;{ }
φi 與y ti( )分別代表[ ]φ 與y t( )第i個分量{ }
TM( ){ }
0 m t i = φ φ , (2.27){ }
TK( ){ }
0 m t i = φ φ , (2.28){ }
TC( ){ }
0 m t i = φ φ ,m≠i, (2.29) 將式(2.26)表示成 ˆ ( ) ( ) ( ) ( ) ( ) ( ) ( ) i i i i i i i m t y t +c t y t +k t y t = f t , (2.30) 其中 ( ){ }
TM( ){ }
i i i m t = φ t φ ,{ }
{ }
( ) T K( ) i i i k t = φ t φ ,{ }
{ }
( ) TC( ) i i i c t = φ t φ ,{ }
ˆ ( ) Tf( ) i i f t = φ t , 此時式(2.30)為單自由度系統之表示式,其系統參數以瞬時模態參數表示可 獲得: 2 ˆ ( ) ( ) 2 ( ) ( ) ( ) ( ) ( ) ( ) i i i i i i i i f t y t t t y t t y t m t ξ ω ω + + = , (2.31) 其中 2 ( ) ( ) ( ) i i i k t =ω t m t , (2.32) ( ) 2 ( ) ( ) ( ) i i i i c t = ξ ωt t m t , (2.33) 由此可定義線性時變系統之瞬時模態參數如下所示 ( ) 1 ( ) 2 ( ) ( ) ( ) 2 ( ) ( ) i n i i n i i k t f t m t c t t t m t π ξ ω ⎧ = ⎪ ⎪ ⇒ ⎨ ⎪ = ⎪⎩ , (2.34)對此多自由度運動方程式進行離散化,其流程與蘇(2008)所推導之單自 由度運動方程式離散化相仿,仿造單自由度運動方程式離散化之流程,利 用中央差分法(central difference approach)可將式(2.24)離散成
( )
( )
( ) ( )
( )
( )
( )
( )
( )
( )
( )
( ) ( )
2 2 2 2 2 2 M C x M M C f K x x t t t t t t t t t t t t t t t t t ⎡ ⎤ + + Δ ⎢ ⎥ Δ Δ ⎢ ⎥ ⎣ ⎦ ⎡ ⎤ ⎡ ⎤ = −⎢ − ⎥ −⎢ − ⎥ − Δ Δ Δ Δ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ , (2.35) 其中Δt為時間增量。可將(2.35)表示成:( )
1( ) (
1)
2( ) (
2)
1( ) (
1)
x t = Φ t x t− + Φ t x t− + Θ t f t− , (2.36) 其中,x t i( − )即代表x t i t( − Δ);( )
1 1 2 2M A K t t t t t t t − −Δ −Δ −Δ ⎛ ⎞ ⎜ ⎟ Φ = − − ⎜ Δ ⎟ ⎝ ⎠,( ) ( )
1 2 2 2 M C A t t t t t t t t − −Δ −Δ −Δ ⎛ ⎞ ⎜ ⎟ Φ = − − ⎜ Δ Δ ⎟ ⎝ ⎠, 1 1 At t − −Δ Θ = − ,( ) ( )
2 2 M C A t - t t t t - t t t Δ −Δ Δ = + Δ Δ 。 雖然於現地通常量測速度或加速度反應,若直接利用速度或加速度反應架構TVARX 模式,則所算得之瞬時模態參數將會有系統誤差( Huang et.al,
2009)。因此,於本研究中,祇考慮用位移反應架構 TVARX 模式。若量得 速度或加速度,可透過不同之技巧積分得位移(參看黃之報告, 1999)。
當量測自由度較系統總自由度少時(即為非完全量測(incomplete measurement)時),TVARX 模式階數之推導如下: 由前面所述,當所有自由度均有量測時(以位移量測為例),對應之 TVARX 模式可表示成
( )
t =Φ1( ) ( )
t xt−1 +Φ( ) (
t xt−2)
+Θ1( ) ( )
t f t−1 x 2 , (2.37) 其中係數矩陣為時間t之函數。 現 假 設 該 系 統 之 總 自 由 度 為 Nd , 量 測 自 由 度 為Nd ; 且 假 設 d d p N N = × ,其中 p 為一整數。令量測自由度之反應歷時表示成xm( )
t ,而未 量測者表示成xu( )
t ,則式(2.37)代表Nd條線性方程式,其中有3(
p 1−)
Nd個未 知反應量(即xu( )
t 、xu(
t−1)
和xu(
t −2)
)。 依式(2.37),吾人亦可得:( )
( ) (
)
( ) (
)
( ) (
)
(
)
(
) (
)
(
) (
)
(
) (
)
(
)
(
) (
1)
(
) (
2)
(
) (
1)
3 2 4 2 3 2 2 2 1 3 1 2 1 1 1 2 1 1 2 1 1 2 1 − − − + − − − + − − − = − − − + − − + − − = − − − + − − + − − = − m t m t m t m t m t m t m t t t t t t t t t t t t t t t x f Θ x Φ x Φ x f Θ x Φ x Φ x f Θ x Φ x Φ , (2.38) 即式(2.39)中之 t 每以t−i替代,則吾人得Nd(
= pNd)
條之方程式,但亦 同時額外增加(
p 1−)
Nd個未知數。方程式之增加速度較未知數增加之速度快。當m= p2 −3時,則有
( )
m 1+ pNd條方程式,亦有( )
m 1+ pNd個未量測值。利 用此( )
m 1+ pNd條線性方程,可將此未量測值由己知量測值來表示。如此可 將TVARX 模式表示成:( )
2 1( )
2 2(
)
1 1 ( ) ( ) x Φ x Θ f p p m i m j i j t t t i t t j − − = = =∑
− +∑
− , (2.39) 若 p 非為一整數時,即若n < p<n+1,其中n為一整數,則依上述之說 明,可知TVARX 之I = n2 +1,J =2n。2.7 局部動態識別
目前建築物之設計大部分依賴ETABS 商業軟體,其剛體樓板之假設, 可使建築物於地震反應分析中,每一層樓簡化成3 自由度(2 水平位移及 1 扭轉自由度)。既然 ETABS 被廣泛使用於設計,顯然 ETABS 之分析模式應 足夠反應實際建築物之地震行為。在此每層樓3 自由度之簡化下,吾人可 很容易引入子結構系統分析觀念,對子結構進行瞬時模態識別,進一步發 現建築物可能損壞之樓層。 多自由度時變線性系統之運動方程式為: ( ) ( ) ( ) ( ) ( ) ( ) ( ) Μ xt t + C xt t + Κ xt t = f t , (2.24) 其中,M,C,K分別為該系統之質量,阻尼係數以及勁度,假設均為時 間函數;x t( )為各個自由度位移反應。當考慮shear building 時,式(2.24)可以用分量表示成 1 1 1 2 2 1 2 2 2 2 3 3 2 3 3 3 3 4 4 3 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( N N N N N N m x t c c c x t m x t c c c c x t m x t c c c c x t c m x t c c x t + − ⎡ ⎤ ⎧ ⎫ ⎡ ⎤ ⎧ ⎫ ⎢ ⎥ ⎪ ⎪ ⎢− + − ⎥ ⎪ ⎪ ⎢ ⎥ ⎪ ⎪ ⎢ ⎥ ⎪ ⎪ ⎢ ⎥ ⎪⎪ ⎪ ⎢⎪ − + − ⎥ ⎪⎪ ⎪⎪ + ⎢ ⋅ ⎥⎨⋅ ⎬ ⎢ ⋅ ⋅ ⋅ ⎥⎨⋅ ⎬ ⎢ ⎥⎪ ⎪ ⎢ ⎥⎪ ⎪ ⎢ ⋅ ⎥⎪⋅ ⎪ ⎢ ⋅ ⋅ − ⎥⎪⋅ ⎪ ⎢ ⎥⎪ ⎪ ⎢ ⎥⎪ ⎪ − ⎢ ⎥⎪ ⎪ ⎢ ⎥⎪ ⎪ ⎣ ⎦ ⎩ ⎭ ⎣ ⎦ ⎩ ⎭ + 1 1 2 2 1 2 2 3 3 2 2 3 3 4 4 3 3 N ( ) ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) N N N N f t k k k x t k k k k x t f t k k k k x t f t k k k x t f t ⎧ ⎫ + − ⎡ ⎤ ⎧ ⎫ ⎪ ⎪ ⎢− + − ⎥ ⎪ ⎪ ⎪ ⎪ ⎢ ⎥ ⎪ ⎪ ⎪ ⎪ ⎢ − + − ⎥ ⎪⎪ ⎪⎪ ⎪ ⎪ = ⎢ ⋅ ⋅ ⋅ ⎥ ⎨⋅ ⎬ ⎨ ⎬ ⋅ ⎢ ⎥ ⎪ ⎪ ⎪ ⎪ ⎢ ⋅ ⋅ − ⎥ ⎪⋅ ⎪ ⎪⋅ ⎪ ⎢ ⎥ ⎪ ⎪ ⎪ ⎪ − ⎢ ⎥ ⎪ ⎪ ⎪ ⎪ ⎣ ⎦ ⎩ ⎭ ⎩ ⎭ (2.40) 根據以上公式,在第 j 個自由度與相鄰自由度之關係式如下 , 1 1 , , 1 1 , 1 1 , , 1 1 j j j j j j j j j j j j j j j j j j j j j m x +c −x − +c x +c +x + +k −x − +k x +k +x + = f , (2.41) ⇒ m xj j +c xj j, j+kj j, xj = −cj j, 1−xj−1−cj j, +1xj+1−kj j, 1−xj−1−kj j, +1xj+1+ fj, (2.42) 應用中央差分法可得速度項與加速度項之表示式如下 1 1 2 ( ) 2 ( ) ( ) ( ) ( ) i i i i x t x t x t x t t + − + − = Δ , (2.43) 1 1 ( ) ( ) ( ) 2 i i i x t x t x t t + − − = Δ , (2.44) 將式(2.42)對ti展開 ⇒ , 2 , 2 , 1 , 1 1 1 1 , 1 1 , 1 1 ( ) [ ( 1) 2 ( ) ( 1)] [ ( 1) ( 1)] ( ) ( ) 2 ( ) [ ( 1) ( 1)] [ ( 1) ( 1)] 2 2 ( ) ( ) ( ) ( ) ( ) j j j j j j j j j j j j j j j j j j j j j j j j j m c i x i x i x i x i x i k i x i t t c i c x i x i x i x i t t k i x i k i x i f i − − − + + − − + + + − + − + + − − + Δ Δ − = + − − − + − − Δ Δ − − + ,
⇒ , , , 2 2 2 , 1 , 1 1 , 1 1 1 , 1 , 1 1 , 1 1 1 ( ) 2 ( ) ( ) ( 1) ( ( ) ) ( ) ( ) ( 1) 2 2 ( ) ( ) ( 1) ( ) ( ) ( 1) 2 2 ( ) ( ) ( 1) ( ) ( ) ( 1) 2 2 j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j m c i m m c i x i k i x i x i t t t t t c i c i x i k i x i x i t t c i c i x i k i x i x i f t t − − − − − − + + + + + + + + + − + − − Δ Δ Δ Δ Δ = − + − + − Δ Δ − + − + − + Δ Δ ( )i , 由所得TVARX 與運動方程式之對等關係,當用位移反應建立 TVARX 模式時,得 1 2 1 1 2 1 3 1 1 1 2 1 3 1 1 1 ( 1) ( ) ( ) ( ) ( 1) ( ) ( 1) ( ) ( ) ( ) ( 1) ( ) ( 1) ( ) ( ) ( ) ( 1) ( ) ( ) j j j j j j j j j x i i x i i x i i x i i x i i x i i x i i x i i x i i f i φ φ θ θ θ η η η γ − − − + + + + = + − + + + + − + + + + − + , (2.45) 其中 2 , 1 ( ) 2 /( ) ( ) ( ) j j j k i m t i i φ α − Δ = − , 2 , 2 /( ) ( ) /(2 ) ( ) ( ) j j j m t c i t i i φ α Δ − Δ = − , , 1 1 ( ) / 2 ( ) ( ) j j c i t i i θ α − Δ = − , , 1 2 ( ) ( ) ( ) j j k i i i θ α − = − , , 1 3 ( ) / 2 ( ) ( ) j j c i t i i θ α − Δ = , , 1 1 ( ) / 2 ( ) ( ) j j c i t i i η α + Δ = − , , 1 2 ( ) ( ) ( ) j j k i i i η α + = − , , 1 3 ( ) / 2 ( ) ( ) j j c i t i i η α + Δ = , 1 1 ( ) ( ) i i γ α = , , 2 ( ) ( ) ( ) 2 j j j m c i i t t α = + Δ Δ , 如此,代入式(2.18)可得[ ]G 為
[ ]
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 1 2 1 0 φ φ G , (2.46) 因此,依式前節所得之瞬時模態估算結果即為系統在 i時刻之瞬時擬自然 振動頻率及阻尼比。2.8 識別動態特性準確指標
為比較識別模態及理論模態之吻合程度,可利用MAC ( model assurance criterion ) 值為指標(Allemang 與 Brown, 1983 )其定義為:
{ }
{ }
{ }
{ }
{ }
{ }
2 * * * MAC( , ) T iI iT iI iT T T iI iI iT iT ψ ψ ψ ψ ψ ψ ψ ψ = , (2.47) 其中{ }
* iI ψ 與{ }
ψiT 分別為識別與理論之第i模態。由以上之定義式可看出當兩 模態完全一致時,MAC=1。但當兩模態差異甚大時,則 MAC 值越接近於 零。 在模態變化下,MAC 值改變並不會相當明顯。因此,考慮一種由 Trifunac(1972)所提出之指標,其定義為: 1 2 * * ( ) ( ) ( ) ( ) T iT iI iT iI T iT iT a a e ψ ψ ψ ψ ψ ψ ⎛ − − ⎞ = ⎜ ⎟ ⎝ ⎠ , (2.48) 其中 a 為修正係數,使( *) (T *) iT a iI iT a iI ψ − ψ ψ − ψ 縮到最小。由以上之定義式可 看出當兩模態相當接近時,e 值會趨近於 0。 當識別之振動頻率與阻尼比分別與理論值相差小於2%和 20%,且 MAC第三章 數值模擬驗證與參數探討
3.1
前言
本章主要利用一三層樓剪力建築物之數值地震反應,驗證本研究所建 構系統識別演算流程之可行性。3.2 節將介紹所要識別之三層樓鋼構數值模 型。3.3 節利用該模型之數值動態反應,以驗證本研究所用方法之正確性及 準確性;並進一步探討各種參數對識別結果之影響。3.4 節則是驗證局部動 態識別之可行性。3.2
數值模型概述
本章利用如圖3.1 之三層樓剪力建築物之數值模擬地震反應,進行系統 識別以確認本研究所用方法之正確性。自由度之編號是從頂樓至最底樓層 依序排列,此三層樓剪力建築物之質量矩陣、阻尼矩陣及勁度矩陣分別為, 1 2 3 0 0 100 0 0 0 0 0 100 0 0 0 0 0 200 m m kg m ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ , 1 1 1 1 2 2 2 2 3 0 124.3 124.3 0 124.3 183.23 58.93 sec/ 0 0 58.93 58.93 239(1 0.5sin(2 /10 )) c c c c c c N m c c c π t − − ⎡ ⎤ ⎡ ⎤ ⎢− + − ⎥ ⎢= − − ⎥ ⋅ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ − + + ⎥ ⎣ ⎦ ⎣ ⎦ , 1 1 1 1 2 2 2 2 2 3 0 20 20 0 20 40 20 / 0 0 20 20 30(1 0.5sin(2 /10 )) k k k k k k KN m k k k π t − − ⎡ ⎤ ⎡ ⎤ ⎢− + − ⎥ ⎢= − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ − + − ⎥ ⎣ ⎦ ⎣ ⎦ ,0≤ ≤t 30, 其中只有c3與k3分別為時間函數,其隨時間變化如圖 3.2 所示。此結構系統 非為一比例阻尼系統,考慮地表加速度輸入歷時如圖 3.3 所示,該歷時為921 地震台中地區某自由場測所得資料。利用 Runge-Kutta 常微分數值計算 技巧,求取各自由度之反應(位移、速度和加速度)。各自由度之位移輸出反 應與頻譜圖如圖3.4 所示。時間總長為 30 秒,取樣頻率為 250Hz。 依第二章所述,考慮每個時間點對應質量參數、阻尼參數與勁度參數, 根據線性系統理論可估算每個時刻之瞬時模態參數,以此來作為理論值(如 圖 3.2 所示)。其第一模態之瞬時擬自然振動頻率與阻尼比分別介於 0.7~1.2Hz 與 3.5%~7%;第二模態之瞬時擬自然振動頻率與阻尼比分別介於 2.1~2.6Hz 與 4.6%~6.6%;第三模態之瞬時擬自然振動頻率與阻尼比分別介 於3.3~4.8Hz 與 2.5%~5.5%。若將時變系統視為非時變系統,則從反應頻譜 中大約識別出第一、二模態頻率分別在 1Hz 及 2.3Hz 附近,而第三模態則 無法分辨(參看圖 3.4)。
3.3 數值模擬驗證
為驗證本研究所建構系統識別程序之可行性及電腦程式之正確性;本 研究將分析三層樓剪力數值模擬地震反應,並將刻意加入雜訊。本節亦將 探討式(2.1)中之模型階數( , )I J 、指數權重函數之影響半徑(dm)、節點數(ln) 以及雜訊,對識別結構系統瞬時動態特性之影響。3.3.1 識別參數定義
以下將探討模型階數(I,J)、指數權重函數之影響半徑(dm)、節點數(ln)等各個參數對時變系統識別之影響,而識別結果與實際時變特性之相對誤 差定義如下: 100% ) ( ) ( ) ( × − i true i true i id t t t ρ ρ ρ , (3.1) 其中ρtrue與ρid分別代表瞬時擬自然振動頻率或阻尼比之實際值與識別所得 之結果。而相對誤差之平均值與標準差分別記為μ與σ 。
3.3.2 無雜訊反應之識別結果
當地表加速度為 921 地震如圖 3.3,取節點數(ln)為 30,權重函數之影 響半徑(dm)為 10,TVARX 模型階數( , )I J 為 (2,2),識別之結果如圖 3.5 所 示。( , )I J =(2,2)是依前章推導所得理論階數。第一個模態之瞬時擬自然振動 頻率與阻尼比之識別最大誤差分別為 0.5%及 1%左右;第二個模態之瞬時 擬自然振動頻率與阻尼比之識別最大誤差分別為0.2%及 0.5%左右;第三個 模態之瞬時擬自然振動頻率與阻尼比之識別最大誤差分別為0.1%及 0.5%左 右。此識別結果屬相當準確。 所用地表加速度為無噪訊比之資料,故考慮到TVARX 模型階數無需提 高。圖 3.6 為在不同節點數考慮不同權重函數之支撐參數dm=4、dm=6、 m d =8、dm=10 下,隨著節點數增加之識別誤差變化曲線。在支撐參數dm=4 時,第一模態在ln ≥25其瞬時擬自然振動頻率及阻尼比之識別誤差趨於穩定;第二模態其瞬時擬自然振動頻率及阻尼比之節點數在30≤ ≤ln 40有比較 好之識別結果;第三模態其瞬時擬自然振動頻率及阻尼比之節點數在ln =30 有最小之識別誤差。支撐參數dm=6、dm=8 與dm=10 時,三個模態之瞬時擬 自然振動頻率及阻尼比在節點數ln ≥20時之識別誤差逐漸趨於穩定,誤差小 於較dm=4 所得者。 圖3.7 為節點數(ln)為 30、權重函數之影響半徑(dm)為 6、TVARX 模型 階數( , )I J 為 (2,2)之各個模態 MAC 值,每個模態之 MAC 值皆非常接近 1, 從而得知識別模態非常準確。
3.3.3 雜訊之影響
為瞭解雜訊對識別品質之影響,於數值分析所得之相對位移反應及輸 入加速度中加入白噪,使得噪訊比(NSR)=5%。然後,對此含有雜訊之訊號, 進行識別,並與未含雜訊之分析結果比較。以下將探討如何挑選不同之參 數如節點數(ln)、權重函數之支撐參數(dm)以及 TVARX 模型階數( , )I J 之識 別結果。 若將時變系統視為非時變系統,則從反應頻譜中大約識別出第一、二 模態頻率分別在1Hz 及 2.3Hz 附近,而第三模態則無法分辨(如圖 3.9 所示)。 圖3.10 為加入 5%噪訊比之識別結果,所使用之參數為節點數(ln)為 20、權重函數之影響半徑(dm)為 6、TVARX 模型階數( , )I J 為(15,15)。第一個模態 之瞬時擬自然振動頻率與阻尼比之識別最大誤差分別為 1%及 4%左右;第 二個模態之瞬時擬自然振動頻率與阻尼比之識別最大誤差分別為 0.5%及 5%左右;第三模態者之識別最大誤差分別為 1.5%及 15%左右。此些結果尚 屬準確。 圖 3.11 為不同支撐參數(dm)與不同節點數在模型階數( , )I J 為(15,15)之 識別誤差,在不同節點數考慮不同權重函數之支撐參數dm=4、dm=6、dm=8、 m d =10 下,隨著節點數增加之識別誤差變化曲線。在支撐參數dm=4 時,第 一模態在ln ≥15其瞬時擬自然振動頻率之識別誤差趨於穩定及在ln ≥20其阻 尼比之識別誤差趨於穩定;第二模態在ln ≥15其瞬時擬自然振動頻率之識別 誤差趨於穩定及在ln =25其阻尼比之有最小之識別誤差;第三模態其瞬時擬 自然振動頻率及阻尼比之節點數在15≤ ≤ln 30有比較好之識別結果。在支撐 參數dm=6 時,第一模態與第二模態在ln ≥15其瞬時擬自然振動頻率之識別誤 差趨於穩定及在ln ≥20其阻尼比之識別誤差趨於穩定;第三模態在ln ≥10其 瞬時擬自然振動頻率之識別誤差趨於穩定及在ln =20其阻尼比之有最小之 識別誤差。支撐參數dm=8 與dm=10 時,三個模態之瞬時擬自然振動頻率及 阻尼比在節點數ln ≥15時之識別誤差逐漸趨於穩定。由以上結果得知,當支 撐參數(dm)越高,識別誤差越小;而在模型階數(I,J)之探討將由利用不同階 數分析含雜訊於不同時間點所得之瞬時頻率來判別。
圖3.12、圖 3.13 和圖 3.14 分別為利用dm=4 秒配合節點數(ln)10、20 和 30 之分析含雜訊反應於不同時間點(t=3、7、13、17、23、27 秒)所得瞬時 頻率之stability diagram。由圖 3.12 可看出,第一模態不需很高之模型階數 就能得到較好之識別結果;第二模態在( , ) (15,15)I J ≥ 可得到較佳之識別效 果,其中在t=17 秒時,模型階數( , )I J 為(15,15)為較準確之識別結果;第三 模態在( , ) (20, 20)I J ≥ 可得到較佳之識別效果。由圖3.13 可看出,第一模態與 第二模態皆不需很高之模型階數就能得到較好之識別結果;第三模態在 ( , ) (15,15)I J ≥ 可得到較佳之識別效果。由圖3.14 可看出,第一模態與第二模 態 皆 不 需 很 高 之 模 型 階 數 就 能 得 到 較 好 之 識 別 結 果 ; 第 三 模 態 在 ( , ) (15,15)I J ≥ 可得到較佳之識別效果。由以上結果可知,當節點數(ln)越高 時,第一模態和第二模態不需很高之模型階數( , )I J 就可得到較佳之識別結 果,第三模態在( , ) (15,15)I J ≥ 可得到不錯之識別結果。 識別結果顯示,在訊號中引入雜訊仍能準確識別瞬時擬自然振動頻率 之變化情形;雖然對阻尼比之識別結果較不理想,但是其誤差尚在可接受 範圍。在選擇參數時,為了得到較佳之識別結果,需選擇節點數(ln)≥15、 支撐參數(dm)越大、模型階數( , ) (15,15)I J ≥ 。 圖3.16 為節點數(ln)為 30、權重函數之影響半徑(dm)為 10、TVARX 模 型階數( , )I J 為 (15,15)之各個模態之 MAC 值,每個模態之 MAC 值皆非常
接近1,從而得知識別模態非常準確。
3.4
局部動態識別
在前節所述者為利用之三層樓剪力建築物之數值模擬地震反應,進行 整體之系統識別。此剪力構架是設計在第三個自由度之勁度參數以及阻尼 參數有週期性變化,然而進行整體系統識別時,是可以明顯看出三個模態 之瞬時擬自然振動頻率與阻尼比隨著時間變化而改變,卻無法得知是哪個 自由度或樓層之阻尼參數與勁度參數隨時間改變。本節將針對利用不同自 由度所構成之子結構系統,建立 TVARX 模型,試圖識別那ㄧ自由度(或那 一層樓)具時變物理性質。吾人將該剪力建築物分為三個子結構系統;第一 個子結構系統為由第一及第二自由度之相對位移及地表加速度所構成,第 二個子結構系統為由第一、第二及第三自由度之相對位移所構成,第三個 子結構系統為第二及第三自由度之相對位移所構成。 圖 3.17(a)考慮第一子結構系統,利用第一個自由度之相對位移反應當 成輸出,第二自由度之相對位移反應以及地表加速度當成輸入透過系統識 別所求得之。由圖3.1 可得知每層樓之質量參數、勁度參數與阻尼參數,此 子結構之理論瞬時擬自然振動頻率與阻尼比分別為1 1 1 1 20 / 2.2508 2 2 100 k KN m f Hz m kg π π = = ≅ , 1 1 1 124.3 sec/ 0.04394 2 2 2 100 2 2.2508 c N m m f kg Hz ξ π π ⋅ = = = ⋅ ⋅ ⋅ , 圖3.17(b) 考慮第二子結構系統,利用第二個自由度之相對位移反應當 成輸出,第一自由度相對位移反應、第三自由度相對位移反應以及地表加 速度當成輸入透過系統識別所求得之。此子結構之理論瞬時擬自然振動頻 率和阻尼比分別為 1 2 2 1 1 20 / 20 / 3.183 2 2 100 k k KN m KN m f Hz m kg π π + + = = ≅ 1 2 2 2 (124.3 58.93) sec/ 0.0458 2 2 2 100 2 3.183 c c N m m f kg Hz ξ π π + + ⋅ = = ≅ ⋅ ⋅ ⋅ 圖3.17(c) 考慮第三子結構系統,利用第三個自由度之相對位移反應當 成輸出,第二自由度相對位移反應以及地表加速度當成輸入透過系統識別 所 求 得 之 , 此 子 結 構 之 理 論 瞬 時 擬 自 然 振 動 頻 率 和 阻 尼 比 分 別 為 1.94Hz~3.07Hz 之間和 0.02~0.09 之間。 以下識別結果仍利用節點數(ln)為 30、指數權重函數之影響半徑(dm)為 4、模型階數(I,J)為(3,3)。由圖 3.18 可知從局部系統識別中可看出第一子結 構系統之瞬時擬自然振動頻率最大誤差在0.05%,阻尼比最大誤差在 0.2%; 第二子結構系統之瞬時擬自然振動頻率最大誤差在0.43%,阻尼比最大誤差
在 0.74%;第三子結構系統之瞬時擬自然振動頻率及阻尼比隨著時間而改
變,瞬時擬自然振動頻率誤差最大在 0.3%,阻尼比最大誤差在 2%。由以
上分析可知,在真實結構物量測時,當結構物受到破壞時,吾人可利用局 部之系統識別,進而得知是在哪個自由度受到破壞。
第四章 應用於振動台試驗數據分析
4.1
前言
本章將第二章所述時變系統識別方法,應用於分析於國家地震工程研 究中心所執行之鋼結構振動台試驗反應,識別此些鋼結構之瞬時模態以及 瞬時自然振動頻率和阻尼比。有二剛結構系統被考慮,分別為一五層樓鋼 構(如圖 4.1 所示)及一六層樓鋼構(如圖 4.2 所示)。4.2 五層樓鋼構架振動台試驗
4.2.1 待測結構物介紹
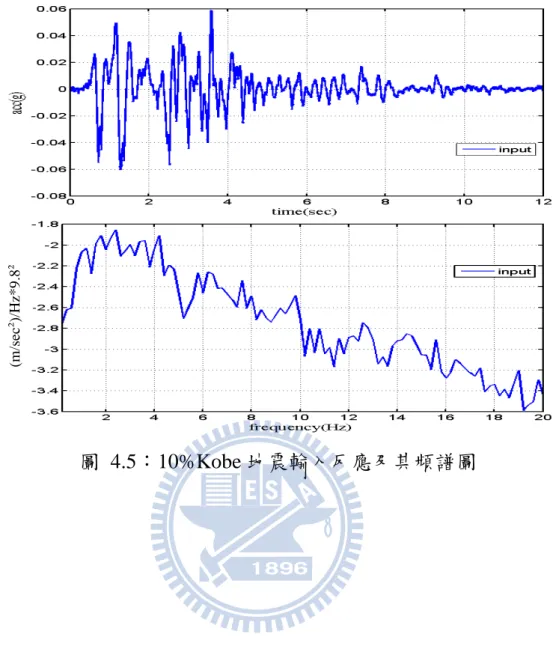
振動台試驗通常在實驗室中實行,以檢驗在地震過程中之結構行為。 國家地震工程研究中心(NCREE)對一長 3m、寬 2m、高 6.5m 之鋼構架進行 一連串之振動台試驗如圖 4.1 所示(葉 等人,1999)。此結構每一樓層樓版部 分為小樑所組成,吾人可以清楚地由上視平面圖4.3 與側視圖 4.4 看出。而 鋼構之材料性質如表 4.1 所示,各樓層之鋼柱斷面為 H125x125x6.5x9、各 樓層長向( X 方向)之樑斷面為 H100x100x6x8、各樓層 Y 方向之樑斷面為 H150x75x5x7、各樓層樓版之小樑則為 H100x50x5x7。另外每個樓層均利用 鉛塊堆疊使得每樓層之質量約為3664kg。4.2.2 輸入之地震力
各樓層之位移、速度、和加速度反應於振動台試驗過程中記錄下來, 並在第一樓層柱頂部分設置應變計。原始資料之取樣率為1000Hz。 當地震力輸入為 10%之 Kobe 地震強度(如圖 4.5 所示)時,結構反應仍 在線性範圍。圖 4.6 與圖 4.7 分別為每一樓層相對位移反應歷時及其頻譜 圖。而當輸入地震強度為60%(如圖 4.8 所示)時,各樓層相對位移反應歷時 即其頻譜圖分別為圖4.9 與圖 4.10。研究中僅針對長跨方向( X 方向)之輸入 與各樓層輸出之反應進行分析。 由應變計資料顯示如圖 4.11 所示,在地震強度達到 60%時,其第一樓 層間之柱已經進入非線性降伏階段。比較 10%Kobe 地震輸入與 60%Kobe 地震輸入之應變反應,兩組輸入之振幅比值約為 0.1667,如果系統保持線 性行為,則兩組輸出反應之應變峰值比值,應與輸出訊號之振幅比值相似。 當輸入分別為 10%與 60%Kobe 地震時,在 1 秒左右之波谷與波峰比值為 0.1646 與 0.1635;而接近 2 秒之波谷與波峰比值分別為 0.1237 與 0.3112。 因此,由應變反應可以初步判斷,當以60%Kobe 地震輸入時,其非線性行 為開始之時間點約為2 秒左右。4.2.3 線性反應之識別結果
以10%Kobe 地震輸入,已知結構反應仍在線性範圍。由此可推知,對 此結構之振動反應進行分析,所識別之瞬時擬自然振動頻率應無明顯地變 化。由圖4.7 之各自由度頻譜圖可得知,其中包含五個主要振動頻率,分別 約在1~2、4~5、8~9、12~13 和 15~16Hz 之間。 圖4.12 為對 10%Kobe 地震輸入之結構位移反應進行識別結果。識別所 使用之參數分別為節點數(ln)為 20、指數權重函數之影響半徑(dm)為 10、模 型階數(I,J)為 (15,15)。在第一模態之瞬時擬自然振動頻率與阻尼比識別結 果變化區間分別為[1.40,1.41]和[0.95%,2.31%];第二模態之瞬時擬自然振動 頻率與阻尼比識別結果變化區間分別為[4.53,4.54]和[0.15%,0.34%] ;第三 模態之瞬時擬自然振動頻率與阻尼比識別結果變化區間分別為[8.23,8.24] 和[0.09%,0.41%] ;第四模態之瞬時擬自然振動頻率與阻尼比識別結果變化 區間分別為[12.37,12.39]和[0.07%,0.73%] ;第五模態之瞬時擬自然振動頻 率與阻尼比識別結果變化區間分別為[15.96,16.06]和[0.92%,0.18%],由圖 4.12 可看出在瞬時擬自然振動頻率大致呈一直線,識別所得各個模態之瞬 時擬自然振動頻率並無明顯之時變特性。此結果與圖4.7 之五個主要振動頻 率大致符合。 圖4.12 為 10% Kobe 地震下各模態之 MAC 以及 e 值,參考模態是用連續小波轉換架構之線性模型分析10%Kobe 地震輸入資料所得之識別結果。 所識別出來之每個模態之MAC 皆趨近於 1 且 e 值趨近於 0,代表此識別結 果相當吻合參考模態。
4.2.4 非線性反應之識別結果
以60%Kobe 地震輸入,結構展現非線性反應;因此,對此結構之振動 反應進行分析,所識別之瞬時模態參數應有明顯之時變特性。圖 4.10 所示 各自由度頻譜圖與10%Kobe 地震輸入所得者比較,兩者之峰值所對應之頻 率並無明顯差異。 圖4.14 為對 60%Kobe 地震為輸入之結構位移反應進行識別之結果。識 別所使用之參數分別為節點數(ln)為 20、指數權重函數之影響半徑(dm)為 4、模型階數( , )I J 為 (15,15)。在第一模態之瞬時擬自然振動頻率與阻尼比 識別結果變化區間分別為[1.34,1.43]和[1.8%,4.7%];第二模態之瞬時擬自然 振動頻率與阻尼比識別結果變化區間分別為[4.38,4.66]和[0.11%,1.05%] ; 第 三 模 態 之 瞬 時 擬 自 然 振 動 頻 率 與 阻 尼 比 識 別 結 果 變 化 區 間 分 別 為 [8.02,8.46]和[0.4%,3.2%] ;第四模態之瞬時擬自然振動頻率與阻尼比識別 結果變化區間分別為[12.20,12.40]和[0.13%,1.22%] ;第五模態之瞬時擬自 然 振 動 頻 率 與 阻 尼 比 識 別 結 果 變 化 區 間 分 別 為 [15.77,16.07] 和[0.44%,1.45%]。識別所得各個模態之瞬時擬自然振動頻率於 2 秒左右有明 顯降低之現象。尤其是第一模態頻率降低特別明顯,第一模態之瞬時擬自 然振動頻率所呈現之時變反應於2 秒由 1.43Hz 降至 1.34Hz(相差超過 5%), 最後平穩回復至 1.4Hz。此結果顯示,當以 60%Kobe 地震為輸入時,此結 構系統於 2 秒左右有顯著之非線性反應。此分析結果與應變計所顯示非線 性反應類似。
圖4.15 為 60% Kobe 地震下各模態之 MAC 以及 e 值,MAC 值在第一、
第二以及第三模態於 1 秒前比 1 秒後還要低,不過大致上還算是準確;第 四、第五模態則是於2 秒時 MAC 值降到 0.995。
4.2.5 五層樓鋼構架之局部動態識別
根據之前2.7 節理論推導,以及 3.4 節數值模擬得知,吾人可以以子結 構觀念,來分析結構物在哪個自由度受到破壞。根據應變計歷時圖(圖 4.11) 得知當地震力輸入為60%之 Kobe 地震強度時,在第一樓層間之柱已經進入 非線性降伏階段。吾人將該五層樓鋼構架分成五個子結構系統,第一個子 結構系統為由第一及第二自由度之相對位移及地表加速度所構成,第二個 子結構系統為由第一、第二及第三自由度之相對位移構成,第三個子結構 系統為由第二、第三及第四自由度之相對位移構成,第四個子結構系統為由第三、第四及第五自由度之相對位移構成,第五個子結構系統為由第四 及第五自由度之相對位移構成。 以下識別結果所使用之參數分別為節點數(ln)為 20、 dm為 6、模型階 數( , )I J 為 (15,15)。圖 4.16(a)考慮第二個子結構系統,利用第二個自由度之 相對位移反應當成輸出,第一與第三自由度之相對位移反應以及地表加速 度當成輸入透過系統識別所求得之。10% Kobe 地震強度之瞬時擬自然振動 頻率變化區間為[9.30,9.36],60% Kobe 地震強度之瞬時擬自然振動頻率變 化區間為[9.28,9.35]。10%與 60%之 Kobe 地震強度所識別出來之頻率相當 接近。圖4.16(b) 考慮第三個子結構系統,利用第三個自由度之相對位移反 應當成輸出,第二與第四自由度之相對位移反應以及地表加速度當成輸入 透過系統識別所求得之。10% Kobe 地震強度之瞬時擬自然振動頻率變化區 間為[8.74,8.83],60% Kobe 地震強度之瞬時擬自然振動頻率變化區間為 [8.71,8.88]。10%與 60%之 Kobe 地震強度所識別出來之瞬時擬自然振動頻 率相當接近。 圖4.16(c) 考慮第四個子結構系統,利用第四個自由度之相對位移反應 當成輸出,第三與第五自由度之相對位移反應以及地表加速度當成輸入透 過系統識別所求得之。10% Kobe 地震強度之瞬時擬自然振動頻率變化區間 為[8.78,8.94],60% Kobe 地震強度之瞬時擬自然振動頻率變化區間為
[8.75,8.91]。10%與 60%之 Kobe 地震強度所識別出來之瞬時擬自然振動頻 率相當接近。圖4.16(d) 考慮第五個子結構系統,利用第五個自由度之相對 位移反應當成輸出,第四自由度之相對位移反應以及地表加速度當成輸入 透過系統識別所求得之。10% Kobe 地震強度之瞬時擬自然振動頻率變化區 間為[10.43,10.49],60% Kobe 地震強度之瞬時擬自然振動頻率變化區間為 [10.01,10.45]。10%Kobe 地震強度所識別出來之頻率呈一直線,而 60%Kobe 地震強度所識別出來之頻率在第 2 秒時產生勁度折減,由此可以得知當地 震輸入為60%Kobe 地震強度在第一樓層間進入非線性降伏階段。
4.3 六層樓鋼構架振動台試驗
4.3.1 待測結構物介紹
振動台試驗通常在實驗室中實行,以檢驗在地震過程中之結構行為。 實驗構架(如圖 4.2)為長 1.5m、寬 1m、高 6m 之六層樓鋼構架,樓地板厚度 2cm,面積大小 1.5m x1.0m;結構鋼柱為實心矩形 15cm x2.5cm 斷面長條形 鋼板;結構鋼梁為5cmx5cm 等厚度 0.5cm 之等邊 L 型鋼圍繞於樓地版外緣 四周,並以焊接方式與樓地版連結。而結構鋼柱與鋼梁的接合方式為,每 一處接頭皆以四顆螺栓鎖定,上部兩顆直接貫穿鎖定鋼樓版,下部兩顆則 直接與鋼樑接合。結構長向(1.5m)為震動台之 Y 向,短向(1m)為震動台之 X向。 實驗構架中含有斜撐構件,一般是作為主動元件實驗測試之用。在本 實驗中,該斜撐構件並未與構架的樓地板接合,故不提供勁度,僅計算提 供的質量大小。而每一樓層中皆擺放兩組之配重質量塊,每組配重質量塊 包含四塊質量塊與夾具,每一個質量塊重 75kg,故每一樓層之兩組配重質 量塊共重600kg。每樓層之質量約為 900kg。