國立臺中教育大學教育暨管理學院體育學系碩士論文
指導教授:張曉昀 博士
多發性踝關節扭傷腳之本體感覺與平
衡能力及其兩者之關連性
研究生:黃經閔 撰
中華民國九十八年十二月
致 謝 詞
歷經千辛萬苦,這一本論文終於完成,非常感謝我的指導教授張曉昀老師,給予我 在論文上的指引和教導,雖然說自己的表現並非盡善盡美,但是老師總是不吝辛勞,給 予我在論文中最大的幫助,讓我在研究中可以清楚的掌握方向,並且順利的進行實驗。 感謝口試委員林晉利老師的指導,總是可以給我許多不同的觀點看這個實驗,並且提供 寶貴的意見。而另一位口試委員許太彥老師也總是細心的指出許多我在論文上的盲點。 承蒙以上三位教授給予本論文的批閱斧正,在此表達十二萬分的謝意。 感謝體育學系碩士班的同學哲彥、肇廷、明諄,以及學弟昆佑、學妹婉鈴在我實驗 的過程中不斷伸出援手,雖然你們也有論文與工作的壓力,但還能在百忙之中安排時間 參與實驗。除了在實驗的幫忙,在研究中繁雜的瑣事,也都能提醒我、幫助我,讓我可 以更順利的完成論文,整個實驗可以有如此成果,均賴你們的協助配合才能順利完成。 最後我想謝謝讓我沒有後顧之憂的家人,親愛的爸爸、媽媽,還有哥哥、姐姐,在 寫論文的這段時間,都可以給予支持與鼓勵, 讓我全心全意的投入研究中,謹以此論 文獻給所有關心我的人。多發性踝關節扭傷腳之本體感覺與平衡能力及其兩者之關連性
中文摘要
研究背景與目的:踝關節外側扭傷是下肢常見的運動傷害,在扭傷後常造成腓骨長肌的
力量不足及收縮時序不對和踝關節位置覺的缺損,但是少有研究針對踝關節力量覺及平
衡關係進行研究,因此本研究之目的為比較外側踝關節扭傷腳與正常腳在力量覺(plantar
flexor/ plantar flexor with knee flexion /evertor)、位置覺(plantar flexion/ inversion)及平衡能
力之差異,並了解本體覺和位置覺與平衡能力之關連性。研究方法:受試者為腳踝外側
扭傷的患者 13 名(20 個扭傷腳)與正常人 9 名(18 個健腳),共 22 人,扭傷腳需在一年內
兩次以上腳踝扭傷病史。力量覺測驗為受試者以測力器測得踝關節自主最大等長收縮力
量(MVIC),分別以 30% MVIC、50%MVIC 進行踝關節肌力重現的評估,測驗的方向共
有 plantar flexor、plantar flexor with knee flexion 和 evertor 三種;位置覺以自製踝關節角
度評估儀器測驗受試者在 plantar flexion 及 inversion 動作上角度主動復位的能力;平衡
能力測驗為單腳站立於測力板上,以閉眼及閉眼動態下階方式評估 10 秒重心變化的軌
跡。以獨立樣本 t 檢定比較扭傷腳與健腳之力量覺、位置覺、及平衡能力的差異,再以
Pearson 積差相關分析扭傷腳的力量覺、位置覺、與平衡能力的關係。結果:位置覺的
測試,plantar flexion 方面,健腳之誤差角度(1.80°±1.17°)顯著少於扭傷腳之誤差角度
括 plantar flexor 30% MVIC、plantar flexor 50% MVIC、plantar flexor with knee flexion 30%
MVIC、plantar flexor with knee flexion 50% MVIC、evertor 30% MVIC 和 evertor 50%
MVIC 兩組間都達顯著差異(p<.05),扭傷腳的力量覺誤差平均值皆大於健腳。平衡能力
測試包括靜、動態平衡的重心軌跡和橢圓面積,這些的項目皆顯示扭傷腳的數值皆顯著
大於健腳的數值(p<.05)。扭傷腳的位置覺測試與平衡測試的結果皆未達到顯著相關性
(p>.05);而扭傷腳的力量覺測試在 plantar flexor 50% MVIC 和所有平衡測試的參數達到
顯著相關性,在 evertor 50% MVIC 則是和靜、動態平衡的重心軌跡達到相關(p<.05)。
結論:位置覺在扭傷腳與健腳的檢測中,在 plantar flexion 的動作上可以達到顯著差異,
但在 inversion 的動作沒有顯著差異,這可能代表位置覺的檢測不一定可以有效的評估踝
關節扭傷的情形;扭傷腳與健腳在力量覺測試中皆能達到顯著差異,得知踝關節扭傷可
能影響力量覺的能力。多次扭傷的腳踝雖然在位置覺測試、力量覺測試、及平衡能力測
試上均大於健腳,但只在 plantar flexor 和 evertor 力量覺的測試上與平衡能力有顯著的相
關性,可能的因素在於扭傷腳並未產生功能性不穩定的情形,因此位置覺並未與平衡產
生關聯性,但可發現外側踝關節扭傷後 plantar flexor 和 evertor 動作的力量誤差可能與平
衡有關,特別在中等程度的力量上。所以當外側踝扭傷後,運動時踝關節周邊肌肉的力
量覺變差,使肌肉控制能力變差,可能再一次造成傷害。
THE PROPRIOCEPTION, BALANCE ABILITY, AND THEIR
RELATIONSHIP FOR SUBJECTS WITH MUTILPLE ANKLE
SPRAIN
Abstract
Background and Purpose: Lateral ankle sprains are the most common and frequent injury in
sports. An ankle injury would result in insufficient peroneus longus muscle strength delay of
muscle contraction timing and sequency, and the deficits of ankle joint position sense. Few
studies had the evidence for the relationship between the ankle force sense and balance.
Therefore, the purpose of the study was to determine the force sense, joint position sense,
balance, and their relationship between healthy subjects and subjects with lateral ankle sprains.
Methods: Twenty-two subjects were tested in this study: 13 subjects with ankle sprain
symptoms(20 sprained ankles) and 9 subjects with bilateral non injured healthy ankles(18
healthy ankles). Subjects with ankle sprain would experience at least 2 significant lateral
ankle sprain within the last year. Ankle force sense testing was measured by dynamometer at
30% and 50% of plantar flexor, plantar flexor with knee flexion, and evertor maximal
voluntary isometric contraction(MVIC). The ankle joint position sense was measured by the
The static/dynamic balance ability was assessed by force plate in the form of the COF total
track length. An independent t-test was used to examine the difference between healthy ankles
and sprained ankles. A Pearson correlation analysis was used to examine the relationship
between force sense, position sense, and balance for subjects with ankle sprained. Results: In
joint position test of plantar flexion direction, error angles of healthy ankles(1.80°±1.17°)
were smaller than sprained ankles(3.26°±1.68°)( p<.05), but there was not significantly
different in joint position test of inversion direction ( p>.05). Force sense error was
significantly greater in the sprained ankles compared to uninjured ankles( p<.05). In the force
sense test: the 30% MVIC plantar flexor, 50% MVIC plantar flexor, 30% MVIC plantar
flexor with knee flexion, 50% MVIC plantar flexor with knee flexion, 30% MVIC evertor,
and 50% MVIC evertor were significantly greater error in sprained ankle than healthy ankle.
In static/dynamic balance test, the group with ankle sprains demonstrated significantly greater
COF total track length compared with the uninjured group (p<.05). In the ankles sprained
group, there were no significant correlations between the joint position sense and balance
performance(p>.05), but significant correlations were found between force sense in 50%
MVIC plantar flexor and all balance performance(p<.05). Conclusion: Position sense test is
not necessarily an effective assessment for the situation of ankle sprains. There were
ankle sprain may be a direct impact on the ability of force sense. Error values of healthy
ankles were smaller than sprained ankles in this study, but significant correlations were found
only between force sense in 50% MVIC plantar flexor and all balance performance(p<.05). It
could be the reason that past ankle sprains without resultant instability did not affect an
individual’s ability to judge ankle position. On the other hand, there were significant
correlations between the force sense tests and balance performance. A sprained ankle caused by damage to surrounding muscles, making neuromuscular control deteriorated, it may once again cause harm.
Keywords: Force sense, Joint position sense, Postural control, Ankle injury, Neuromuscular control
目錄
第一章
緒論
--- 1 第一節 研究背景--- 1 第二節 研究目的--- 3 第三節 研究動機--- 3 第四節 研究假設--- 4 第五節 研究範圍與限制--- 4 第六節 操作性定義--- 5第二章
文獻探討
--- 6 第一節 踝關節扭傷的發生率及併發症狀--- 6 第二節 本體感覺的定義與功能--- 7 第三節 踝關節扭傷對本體感覺的影響--- 12 第四節 踝關節扭傷對平衡的影響--- 17 第五節 文獻回顧之綜合探討--- 24第三章
研究方法
--- 26 第一節 研究對象--- 26 第二節 實驗時間與地點--- 27 第三節 實驗器材與設備--- 28 第四節 實驗方法與步驟--- 30 第五節 資料處理與統計分析--- 38第四章
研究結果
--- 39 第一節 受試者基本資料--- 39第二節 扭傷腳與健腳在位置覺測試中之角度誤差--- 40 第三節 扭傷腳與健腳在力量覺測試中之力量誤差--- 42 第四節 扭傷腳與健腳在平衡測試中之結果--- 45 第五節 位置覺測試與平衡測試之相關性--- 46 第六節 力量覺測試與平衡測試之相關性--- 47
第五章
討論
--- 49 第一節 扭傷腳與健腳在位置覺測試中之差異--- 49 第二節 扭傷腳與健腳在力量覺測試中之差異--- 53 第三節 本體覺和平衡測驗的相關性--- 55第六章
結論與建議
--- 59 第一節 結論--- 59 第二節 建議--- 60參考文獻
--- 61附錄
--- 69表目錄
表 2-1、本體覺測試方式的再測信度--- 36 表 4-1、受試者基本資料--- 39 表 4-2、扭傷腳與健腳在位置覺測試中之預估測量之角度--- 41 表 4-3、扭傷腳與健腳在位置覺測試中之角度差異--- 41 表 4-4、扭傷腳與健腳在力量覺測試中預估測量之施力值--- 43 表 4-5、扭傷腳與健腳在力量覺測試中之力量誤差--- 44 表 4-6、扭傷腳與健腳在平衡測試中之結果--- 45 表 4-7、位置覺測試與平衡測試之相關性--- 46 表 4-8、力量覺測試與平衡測試之相關性--- 48圖目錄
圖 2-1、身體感覺的來源--- 8
圖 2-2、Star Excursion Balance Tests 的 8 個方向--- 23
圖 3-1、徒手測力器--- 28
圖 3-2、自製踝關節角度評估儀器--- 28
圖 3-3、Zebris測力板--- 29
圖 3-4 evertor 肌力的測試--- 31
圖 3-5 plantar flexor 肌力的測試--- 32
圖 3-6 plantar flexor with knee flexion 肌力的測試--- 32
圖 3-7、plantar flexion 位置覺的測試--- 34 圖 3-8、inversion 位置覺的測試--- 34 圖 3-9、靜態平衡的測試--- 35 圖 3-10、動態平衡的測試--- 35 圖 3-11、實驗流程圖--- 37 圖 5-1、踝關節外側區之韌帶--- 52
第一章 緒論
第一節 研究背景
踝 關 節 扭 傷 是 下 肢 常 見 的 運 動 傷 害 , 佔 所 有 運 動 傷 害 的 15% 至 30% 的 比 率
(Yokoyama, Matsusaka, Gamada, Ozaki, & Shindo, 2008),在美國每天的發生率大約是
23000次(Sefton 等, 2009)。在身體活動中,踝關節要承受除了足部以上的身體重量,也 由於它是身體與地面接觸的主要關節,所以無論是身體靜態的站立、跑步或跳躍,首當 其衝就是考驗踝關節的負荷效果,也因此扭傷的風險也就一直居高不下(王顯智,1998), 所以我們可以了解,踝關節在運動中不但扮演極重要的角色,而且容易遭受非預期性的 傷害。 踝關節外側韌帶扭傷之後大約有31%~35%會有功能性踝關節不穩定(functional instability)的情形發生,功能性踝關節不穩定有以下的特徵:重複性的踝關節扭傷和身 體動作時,踝關節會產生一種「無力感」(giving way)以及容易低估或高估關節的角度位 置(Freeman, 1965),所以有踝關節扭傷病史的人可能再度扭傷腳踝。造成功能性踝關節 不穩定的原因有很多,其中可能的原因包括腓骨長肌的力量不足、肌肉拉傷及收縮時序
不對和本體感覺的缺失(Kaminski, Perrin, & Gansneder, 1999; Yokoyama 等, 2008;
McKeon & Hertel, 2008 )。
經、肌伸張的反射和神經支配的交互作用,他更進一步將本體感覺定義為:維持身體姿
勢、步態協調及感知身體相關位置的能力。本體感覺可以分為三種:運動覺(kinesthesia)、
關節位置覺(joint position sence)及力量覺(sence of force)( Riemann & Lephart , 2002)。關
節位置覺和運動覺可以代表個體的關節在活動中感受肢體在空間位置的能力,以及預估 關節運動的能力;而力量覺是個體感受施力強度的感覺。國內的學者康福仁(2002)以 8位單側功能性踝關節不穩定者與8位正常受試者比較,經由Biodex等速肌力測量儀進行 量測本體感覺功能的測驗。發現功能性踝關節不穩定者其患側腳之整體關節誤差角度明 顯大於正常人,進而推斷功能性踝關節不穩定者其患側腳之本體感覺的位置覺較正常人 差。 肌肉力量的知覺來自兩個不同的來源,一個是從肌肉的傳入回饋產生的張力知覺
(the sense of tension),而另一個是從中樞神經所產生的用力的知覺(the sense of effort)。
在過去的研究中發現踝關節發生eversion扭傷後,約有15%會造成eversion肌肉的拉傷,
約2%的患者描述腓骨長肌的最大壓痛感超過韌帶 (Arnold & Docherty, 2006),因此推測
踝關節外側扭傷後,除了影響關節位置覺之外,可能影響力量覺的表現。
另外在平衡能力部分,也是許多踝關節扭傷研究中常去討論的部分。平衡能力分為
靜態及動態平衡,在過去研究中(Brown & Mynark, 2007; Isakov & Mizrahi, 1997;
Korpelainen, Kaikkonen, Kampman, & Korpelainen, 2005; McKeon & Hertel, 2008)大多評
是在運動員發生踝關節扭傷的瞬間,大多是在動態活動之下,因此動態平衡的測試對於
踝關節扭傷者的變化是需要去評估的。
第二節 研究動機
踝關節扭傷後容易造成肌肉、肌腱甚至於骨骼、關節囊、韌帶的破壞,造成位置知
覺的缺陷,這常是在研究中討論的重點,(Caulfield & Garrett, 2004; Glencross & Thornton,
1981),而在扭傷後,對於肌肉、肌腱以及韌帶所產生的傷害,對於施力和力量的感受 也必定造成困難,再者在發生踝關節扭傷的瞬間,大多是在動態活動之下,但是文獻中 針對力量覺和動態平衡的探討卻是相當有限。所以研究探討扭傷的腳踝和健康的腳踝, 分別以位置覺和力量覺作檢測,藉以平衡能力測驗作為比較,探討兩者對於踝關節扭傷 的評估及其適用性。
第三節 研究目的
由上述之介紹,我們可以了解到踝關節扭傷可能影響力量覺以及動態平衡能力的表 現,但因為相關的研究文獻較少,因此衍生出本研究之三個目的:一、比較外側踝關節扭傷者與正常人在力量覺(plantar flexion/plantar flexor with knee
二、比較外側踝關節扭傷患者與正常人在靜態及動態平衡之差異。
三、了解外側踝關節扭傷者的平衡與本體感覺之相關。
第四節 研究假設
根據上述之目的,本研究之假設如下所列:
一、外側踝關節扭傷者與正常人在力量覺(plantar flexion/plantar flexor with knee
flexion/evertor)及位置覺(plantar flexion/inversion)有顯 著的差異。 二、外側踝關節扭傷患者與正常人的靜態及動態平衡有顯著差異。 三、外側踝關節扭傷患者在平衡和本體感覺有顯著相關性。
第五節 研究範圍與限制
一、本研究的受試者只針對曾經在實驗之前一年內發生1次以上的踝關節扭傷,並未去 區分受傷的嚴重性。 二、研究中沒有針對運動覺(kinesthesia)的特性加以測試。 三、排除急性期踝關節扭傷的患者。第六節 操作性定義
一、本體感覺(Proprioception):維持身體姿勢、步態協調及感知身體相關位置能力,主
要為:運動覺(kinesthesia)、關節位置覺(joint position sence)及力量覺(sence of force)。
二、踝關節扭傷(ankle sprain):踝關節扭傷是指韌帶因為外力過度作用而導致韌帶纖維
本身或者附著處有某種程度的傷害(黎俊彥、林威秀、黃啟煌,2004)。
三、多發性踝關節扭傷(multiple ankle sprains):踝關節的外側韌帶曾經有兩次以上扭
傷的病史(Garn & Newton, 1988)。
四、肌力重現(Force reproduction, FR):肌梭和高爾肌腱器,依據這兩種感受能力來評估
肌力或張力的感覺,再重複完成指定的肌力。
五、最大主動等長收縮(Maximal Voluntary Isometric Contraction, MVIC):受試者以自己
最大努力表現出來的等長收縮。
六、主動關節復位測試(active angle reposition test):依照本體感覺的關節位置覺,先讓
受試者感受指定的關節角度,之後主動完成指定的關節角度。
七、重心軌跡(COF total track length):身體重心在測力板落下的位置,隨著時間改變,
身體重心位置可能會移位,按照時序連接所有重心位置,形成的線段即是重心軌跡。
八、重心橢圓面積(Confidence ellipse area):根據重心軌跡的的形狀,以軟體WinFDMS
Video Stance v1.1.1 進行運算,計算出近似橢圓面積,因為重心軌跡集中在這範圍,
第二章 文獻探討
本研究將依據研究目的的內容,做下列幾個部分文獻探討:第一節、踝關節扭傷的 發生率及併發症狀;第二節、本體感覺的定義與功能;第三節、踝關節扭傷對本體感覺 的影響;第四節、踝關節扭傷對平衡的影響;第五節、文獻回顧之綜合探討。第一節 踝關節扭傷的發生率及併發症狀
踝關節扭傷是相當常見的運動傷害,因為踝關節承受除了足部以上的身體重量,身 體的活動常會帶來該處不小的負荷,因此踝關節的角色相當吃重,一不小心即會造成傷 害。以有運動習慣的人來說,踝關節扭傷的機率相當高,在美國每天的發生率大約是 23000次(Sefton 等, 2009),而運動中又以籃球、美式足球的發生率最高,踝關節扭傷就 佔籃球運動傷害的21%(王碧宗、紀忠呈,2001)。 踝關節扭傷是指韌帶因為外力過度作用而導致韌帶纖維本身或者附著處有某種程 度的傷害,黎俊彥等(2004)指出踝關節扭傷是一種常見的下肢運動傷害,踝關節位置 控制無力感以及反覆扭傷則是功能性踝關節不穩定的一種特殊感覺與徵兆,這樣的徵兆 通常是嚴重踝關節inversion傷害之後遺症,會影響個體的運動表現與肢體活動。功能性 踝關節不穩定最早由1965年的Freeman定義,指出當腳出現無力感即是功能性踝關節不穩定,Freeman更進一步指出踝關節的本體受納器受到了傷害,導致踝關節的韌帶在反
應壓力時產生延遲的現象,因而造成功能性踝關節不穩定。雖然上述的定義起初是用來
反映單一特質的主觀症狀,但這樣的準則直到今天仍然受到廣泛的使用,如沒有這樣的
客觀測驗,相信對於臨床醫師在評估功能性踝關節不穩定時會面臨更多困難(Docherty,
Gansneder, Arnold, & Hurwitz, 2006)。Tropp, Askling, 與Gillquist (1985)則指出當患者關
節活動範圍並未超過生理上關節活動度,但是其關節活動超出自主控制能力時,該情況
即為功能性踝關節不穩定之症狀。
Willems, Witvrouw, Verstuyft, Vaes, 與Clercq(2002)以87位體育系大學生分為兩組,
一組為踝關節不穩定的患者,一組為健康組,經由Biodex等速肌力測量儀進行主動及被 動關節復位的測驗,以及離心、向心的inversor、evertor的肌力。結果發現踝關節不穩定 的組別其角度的復位較健康組不準確,而踝關節不穩定的組別同樣也顯示出其evertor相 對肌力(相較於體重)比健康組來得小。 上述的研究讓我們相信踝關節扭傷可能會造成踝關節功能性不穩定、關節位置覺及 evertor肌力的弱化,所以踝關節扭傷對人體有著相當大的影響。
第二節 本體感覺的定義與功能
(temperature)和有意識的本體感覺(conscious proprioceptive senses),以上述的這些項目再
向下細分,組成人體相當精細的感覺網路(Riemann & Lephart, 2002)。
身體感覺
觸覺
有意識的本體感覺
痛覺 壓力覺 癢覺 觸覺 力量覺 溫度覺 運動覺 關節位置覺 振動覺圖 2-1、身體感覺的來源( 修改自 Riemann & Lephart, 2002)
本體感覺(proprioception)的概念,最早由Sherrington(1906) 所提出,指出這是一種
由肢體提供回饋到中樞神經系統的形式,本體感覺受器(proprioceptors)位於肢體的本體
感覺區(Proprio-ceptive field),它可以被激化並傳送機械刺激的訊息,感受身體的關節穩
力。第一項為身體傳出的活動能力,後兩項為感受本體感覺的傳入活動能力。受納器傳
導訊息經組織中的受納器受機械應力的改變及組織被動牽張,產生壓力變化,進而產生
動作電位後傳送至中樞,因此稱感應機械應力的受納器為機械受納器(mechanoreceptors)
(Lephart, Swanik, & Boonriong, 1998)。透過本體受納器,得知部分身體位置的認知即
肌肉運動知覺(kinesthesia),而關節的運動速度和相關位置也是經由肌肉運動知覺所獲 得的感覺(Mountcastle,1980)。 本體感覺和動作的執行息息相關,一般來說,本體感覺系統可以從周邊感覺傳入的 改變獲得訊息,協助人類動作時的控制和感受。LaRue 等(1995)指出:本體感覺提供 足夠且整合的資訊,可以讓身體在既定的時間內完成指定的動作,這也表示本體感覺和 身體活動的時序有相當大的關聯。為了達到預期的動作,本體感覺的功能可說是不可或 缺的。Ingram 等(2000) 發現當本體感覺缺乏時,為了精確的執行動作,本身的注意力 更需要高度的集中,以監控預定要完成的動作。 在動作控制上的訊息,本體感覺所扮演的角色主要可以分為兩種類型:一、本體感 覺的角色涉及外部環境的變化,為了外在環境非預期性的干擾,身體的動作計畫通常會 被調整來適應這樣的情況。以走路這個例子來說,走在不平坦的路上,身體就必須要作 出適度的反應來維持平衡;二、關於動作控制的本體感覺訊息,是可以當作身體內部產 生動作指令的計畫和修正,在下一個動作指令前,動作控制系統必須思考肌肉骨骼系統 的組成以及彼此之間的複合機轉,例如:當關節的角度要轉動10度時,該處的肌肉必需
依據關節的角度作出精確的收縮,而這樣的運動涉及肌肉張力的多寡,也可能關係到其
他關節的角度變化 (Hasan & Stuart, 1988) 。
本體感覺的訊息提供獨特的感覺元件到神經系統的各個層級,並執行最有效的動
作,在各個不同類型的本體感覺在實際的動作中可以幫助個體有效的確認動作和環境的
資訊,不同的感覺整合似乎才能夠提供完整的動作訊息。Balslev, Cole, 與Miall(2008)
指出視覺和聽覺的本體感覺不只在空間上有交互作用,在時間上的相互影響也是顯著 的,所以完整的聽覺訊息是可以促進視覺回饋的進行。林聖豐(2003) 指出本體感覺是透 過視覺與前庭所接收到的訊息,及周邊本體感覺的感覺受器,反應在關節移動與關節位 置的感知能力,經由傳入神經元將訊息輸入至中樞神經系統(CNS)並產生感覺,所以 並非是單一種感受能力就可以幫助個體完成既定的工作,透過不同的感覺整合才能表現 出精確的動作。 本體感覺依照所在的位置而分為四種類型 (許世昌,2008): 1、肌梭(muscle spindle):肌梭分佈於整個肌肉,是由一些細的肌肉細胞組成的,中央部 分有兩種感覺神經纖維,可分為較大的Ia 型纖維和較小的II 型纖維,當中央部分受到 拉力時,就可以刺激這兩種纖維,將衝動傳入脊髓。肌梭提供骨骼肌伸展的訊息,使之 傳入中樞神經系統,促進肌肉收縮的協調。有兩種牽張方式會興奮肌梭:(1)肌內梭纖維 的收縮。梭內纖維的兩端部分產生收縮,造成位於中央的感受器也受到牽張而刺激輸出 神經纖維末梢讓肌梭興奮。(2)肌肉的牽張。當肌肉受到力量被拉長時,位於其中的肌梭
也會被牽張,此時肌梭就會因此產生興奮(王信民,2005)。
2、高爾肌腱器(Golgi tendon organ):主要是保護的功用,位於肌腱和肌肉纖維的交接處,
由薄的結締組織被膜包住膠質纖維而形成。高爾肌基腱器可以查覺肌腱上的張力,當骨
骼肌收縮時,肌腱在瞬時間所承受的張力訊息可以立即傳送至中樞神經系統,避免過度
張力,以保護肌腱和相關的肌肉。高爾肌基腱器藉由抑制主動肌(agonistic muscles)與協
同肌(synergistic muscles)的運動神經元,並且興奮拮抗肌(antagonistic muscles)的運動神
經元,以張力回饋機制來增加或是降低肌肉張力(康福仁,2002 )。
3、關節動力感受器(joint kinesthetic receptor):位於滑膜關節的關節囊內或周圍,可將關
節位置改變的訊息傳送至中樞神經系統。關節受器包括以下4種,高基氏韌帶神經末稍
(Golgi lignment endings)、游離神經末稍(Free nerve endings)、巴齊尼氏小體(Pacinian
corpuscles)和羅非尼氏神經末稍(Ruffini endings)(康福仁,2002)。巴齊尼氏小體(Pacinian
corpuscles)屬於一種快速適應的受器,可以用來反應微小的壓力改變,特別對於關節的
受力方向和活動速度快速改變時較容易受到刺激,此外,當關節角度改變時,對於開始
的角度和最後的角度刺激也較為明顯( Barrack, Skinner, & Buckley, 1989);羅非尼氏神經
末稍(Ruffini endings) 屬於慢適應的機械受器,此機械受器可以傳達關節旋轉角度的改
變及靜態穩定的關節位置訊息,可以感受關節或肌肉的相對位置改變(林威秀,2009)。
游離神經末稍(Free nerve endings)位於關節囊、滑液囊、脂肪墊與韌帶,與疼痛感覺有關,
感,有的對有害的生化物質刺激或機械刺激做出反應,有的則對無害的機械刺激反應
(Lephart, Pincivero, Giraldo, & Fu, 1997);高基氏韌帶神經末稍(Golgi lignment
endings),存在於十字韌帶、副韌帶及半月板組織中,為慢適應接受體。在肌腱與肌肉 交接處,可以反應肌肉的收縮及牽扯,受到刺激時會使同側肢體產生抑制性的收縮,而 對側產生拮抗作用;在韌帶上主要監測關節骨端之位置,對於姿勢的改變及關節受力方 向容易產生興奮;在囊內主要負責感受關節囊垂直性擠壓外力(李宏滿,2002)。 4、壺腹膌(crista)與聽斑(acustica macula):壺腹膌位於半規管,主要是傳遞動態平衡的 訊息至小腦;聽斑位於橢圓囊和球狀囊內,傳遞靜態平衡的訊息。
第三節 踝關節扭傷對本體感覺的影響
由上述的研究可以得知:踝關節扭傷可能造成踝關節的本體受納器的傷害,進而降 低本體感覺的功能。本體感覺可以分為三種:運動覺(kinesthesia)、關節位置覺(jointposition sence)和力量覺(sence of force),以下便針對這三種感覺探討踝關節扭傷對本體
一、 踝關節扭傷對運動覺(kinesthesia)的影響
運動覺(kinesthesia)是指個人在運動的時候,肢體和關節在空間操作過程的感覺,運 動覺包含數種不同類型的運動覺訊息的接收器,經由整合來感覺關節和肢體的位置和運 動方向(張麟洪、陳信欽,2004)。簡單來說就是辨別關節的動作和位置的能力(Garn & Newton, 1988)。因此藉由踝關節運動覺能力的評估,進一步了解該處的肌肉或是本體感 覺是否有所改變。早期Garn 和 Newton(1988)便利用簡單的改造儀器(Kinesthesiometer) 來評估踝關節的運動覺。Kinesthesiometer是一種可以用緩慢且穩定的速度改變受試者腳 踝角度的儀器,改變角度的速度固定為每秒0.3度,最大可以調整到5度。在進行評估的 時候,Kinesthesiometer由研究者來操作,受試者由布幕擋住視覺,單純的感覺研究者是 否改變受試者腳踝的角度,總共測試30次,其中15次有改變角度,另外15次的角度保持 不動,在隨機測試的情況下,受試者必須要回答出30次腳踝的感受,最後實驗的數據經 由敏感度(sensitivity)的計算,得知受試者運動覺的能力。這項實驗的結果發現健康者相 較於腳踝扭傷的患者,有顯著較高的敏感度,也有顯著較好的正確率和較低的失敗率。 以上述的實驗來看,踝關節扭傷可能會導致身體偵測關節動作的能力減少,以運動覺的 檢測,配合正確率、失敗率以及敏感度的計算,將可以更有效的比較踝關節扭傷的情況。二、踝關節扭傷對關節位置覺(joint position sence)的影響
最早研究踝關節角度復位的文獻為Glencross 和Thornton(1981)測量踝關節在 plantar flexion和dorsiflexion時的位置感覺,他們發現隨著受害情況的加重,對於關節角 度復位的能力就會下降,研究產生的誤差也隨之提升。黎俊彥、林威秀與黃啟煌(2006) 檢測功能性踝關節不穩定對於踝關節本體感覺之影響,該研究的受試者共21位(9位雙 踝健康,3位有單側功能性踝關節不穩定徵兆,9 位雙踝皆有功能性踝關節不穩定徵 兆),檢測方式是以Biodex III 等速肌力測試系統量測腳踝關節主動與被動復位誤差角 度,研究的結果驗證功能性踝關節不穩定會有顯著較差的本體感覺,降低的本體感覺功 能可能與踝關節損傷後壓力感受訊號傳入受損有關。 功能性踝關節不穩定造成位置知覺的缺陷,也因此造成前饋控制無法正確的讓踝關 節產生預期的正確動作。Caulfield和Garrett(2004)以落地後的反作用力來比較功能性踝關 節不穩定的組別和健康組的參數,受試者以赤腳接受測試,儀器採用測力板(Bertec force-plate)並調整至500Hz的頻率下進行實驗。受試者以非受測腳站在40cm的高臺上, 另一受測腳放鬆而不支撐身體重量,接著非受測腳用力讓身體往前落下,以受測腳落至 測力板的中間,以上述的測驗步驟重複測試5遍。實驗所獲得的參數是由著地後的150ms 所擷取,為了讓落地的反作用力可以標準化,因此以反作用力佔受試者體重的比率作為 表現的參數。研究結果顯示這兩組在橫向及前向的反作用力皆達到顯著差異,這樣的結果可能是由於在落地的前期,踝關節因為位置知覺的缺陷而沒有辦法採取理想的姿勢吸 收落地的衝擊(Konradsen, 2002),所以在這樣的情況下,患者幾乎是無法即時反應來保 護踝關節受到過度的衝擊力。Caulfield和Garrett(2004)更提到動作行為的表現是依賴大腦 同時得知「控制身體」和「預期這個動作的結果」而完成,功能性踝關節不穩定的患者 對於預期動作指示的結果和預期的感覺結果可能都會感到困難。
三、踝關節扭傷對力量覺(sense of force)的影響
高爾肌腱器和表皮受器,可以提供有關於肌肉張力和壓力的訊息,讓個體可以評估力量的感覺,進一步可以流暢的控制施力的大小(Simon & Ferris, 2008)。肌梭的傳入訊
息可以提供的關節位置和移動的感覺,而這是肌梭幫助身體活動提供一種相當重要的功 能(Proske 等, 2004)。所以肌梭和高爾肌腱器在本體感覺中扮演相當重要的角色:肌梭 的感覺會隨著肌肉長度而改變,而高爾肌腱器可針對肌肉張力的改變進行確認。肌力重 現(Force reproduction, FR)的評估方式主要就是依據這兩種感受能力來評估肌力或張力 的感覺,靠著關節的本體感覺,肌力重現可以提供大量的傳入訊息以茲研究(Dover & Powers, 2003)。 Vuillerme 和 Boisgontier(2008) 指出肌肉力量的感覺是分別來自於兩個來源,一是 藉由高爾肌腱器的傳入回饋,得到肌肉張力的感覺,二是來自於中樞神經所產生努力的
知覺,他們更進一步探討肌肉的疲勞對於踝關節力量覺的關連性,在沒有視覺回饋的情
況下,以壓力繪製系統(a pressure mapping system)來讓受試者的踝關節進行趾屈肌力的
重現,結果發現疲勞的組別之力量重現所造成的絕對誤差和變異誤差皆比正常組來得 高,因此推論疲勞的肌肉導致力量覺的改變,而這樣的結果正是中樞神經所產生努力的 知覺已經被改變所造成的。當關節囊和關節周邊組織受到傷害就是我們所謂的去傳入作 用(deafferentation),該部位受損的神經、肌肉、肌腱和韌帶無法發揮正常的功能,所以 無法精確的感受關節的位置、角度和施力的程度。因此在進行特定動作時,需要身體其 它的回饋(像是視覺和聽覺回饋),才可能順利完成動作。失去了重複的輸入訊息(像是視 覺和聽覺回饋),去傳入作用(deafferented)的患者嘗試想要施展指定的力量是有困難的, 因為施力時無法精確的適應動作指令,也缺乏肌肉努力收縮的感覺(Lafargue, Paillard,
Lamarre, & Sirigu, 2003)。
Arnold和Docherty(2006)以問卷和自我報告(Self-Reported)的方式調查受試者踝關
節的情況和無力感出現的頻率,藉此來判定是不是受試者是否有踝關節不穩定的徵兆,
共找出20名有單側踝關節不穩定的患者進行實驗,實驗中首先讓受試者測出evertor最大
主動等長收縮(Maximal Voluntary Isometric Contraction, MVIC),以低負載(10、30% MVIC)
的方式藉由吊掛荷重元(Load Cell)進行評估,結果發現在10% MVIC的測試中,以問卷
和自我報告(Self-Reported)的方式挑選的踝關節不穩定的患者,其evertor力量誤差皆到達
踝關節無力感的患者,在重複完成相同的evertor肌力時是有困難的。
Docherty和Arnold(2008)主張:感受關節的位置和移動可能不是只有單一運動覺的能
力可以影響關節的穩定性,對於個體而言,感覺肌肉的張力和力量也是同樣重要的。於
是他們以20位有功能性踝關節不穩定的患者和20位踝關節沒有病史的健康者為受試
者,評估踝關節evertor力量的感覺,首先讓受試者測出evertor最大自主等長收縮(Maximal
Voluntary Isometric Contraction, MVIC),依照個人的數據來擬定10%、20%和30%的
MVIC,之後再讓受試者表現出三種不同的力量。第一次的施力根據儀器讀出裝置引導 至既定的力量達5秒鐘,接下來的測試就憑受試者的感覺重複第一次的力量,此時受試 者都要戴上眼罩以避免視覺回饋。測試結果發現功能性踝關節不穩定組的絕對誤差 (absolute error) (3.7 ± 2.2 N)明顯地高於健康組(2.8±1.1 N),而功能性踝關節不穩定組的 變異誤差(variable error) (3.2±1.8 N)也明顯地高於健康組(2.4±0.8 N),所以可以推斷功能 性踝關節不穩定和個體沒有辦法精確地重現指定的力量有關,所以腳踝扭傷不僅帶來身 體的不適,施力的感受也會改變,進而影響身體正常的動作。
第四節 踝關節扭傷對平衡的影響
Bryan 與 Scott(2002) 指出本體感覺對於關節的穩定可以作為基礎的感覺控制,並 且利用關節受器來提供獨特而細微的作用,所以本體感覺的缺陷也會造成關節控制的失調。踝關節的本體感覺弱化,首當其衝就是維持平衡能力的改變,影響平衡能力的維持
因素相當多,像是本體感覺、神經肌肉控制、位置的控制及肌力的損傷都可能會導致踝
關節不穩定(Hertel, 2002)。不過在研究上仍然常以身體姿勢穩定性的評估來探討踝關節
的本體感受能力,進而推估踝關節扭傷的情況(黎俊彥等,2004)。Ross, Arnold, Blackburn,
Brown, 與Guskiewicz (2007)指出,改善姿勢的不穩定和增加踝關節的穩定性以及減少反 覆的扭傷有很大的關連,這也指出身體姿勢穩定性和反覆的扭傷關係密不可分,改善其 中一項的表現,而另一項就會如預期的進步。因此我們對受試者的平衡能力進行評估, 將可以有效的了解關節的穩定性和本體感覺的功能。 平衡是指人體重心保持在一定的身體基底範圍內的能力,平衡能力可以分為靜態平 衡和動態平衡的能力,靜態平衡能力是指身體保持直立穩定而無運動和轉動的能力;而 動態平衡能力是指從不平衡的身體姿勢回復平衡姿勢或保持運動中身體的姿勢 (黎俊 彥等,2004;李燕茹,2007)。以下我們便探討踝關節扭傷對這二種平衡的影響。
一、靜態平衡(static balance)
林純彬(1996)探討腳踝扭傷對單腳站立平衡的影響。受試者為 14 名單側腳踝扭 傷的,以反作用測力板來測量其姿勢運動,以反作用測力板測得的壓力中心軌跡圖,計指數參數(scaling exponents),以比較患側與健側的差異。實驗結果顯示患側長時間站 立,其內外方向之分散係數大於健側值,這也意謂著患側長時間的站立,其內外方向穩 定度較差。成戎珠、蘇芳慶、林純彬與何金山(1997)探討腳踝inversion扭傷對患者單 腳站立身體擺動的影響,以測力板測量單腳站立姿勢擺動的敏感度,發現受試者的身體 擺動在閉眼時均比張眼大,在「反作用力在兩軸擺動的變異性」的參數上可區別健側肢 與患側肢單腳站立的差異,得知身體擺動在患側肢站立時比在健側肢時站立時還要大, 而且到達顯著差異。上述的兩個研究雖然測試的參數不一樣,但也都是同樣地以維持的 平衡概念來對照踝關節是否扭傷。 Brown 與 Mynark(2007)探討靜態平衡和功能性踝關節不穩定的相關性,以兩組 受試者實驗,一組是功能性踝關節不穩定的業餘運動員20位,男女各半,平均21.45 ± 3.41 歲,另一組擁有健腳的業餘運動員20位,男女各半,平均22.10 ± 4.151歲,研究的方法 由測力板測出雙腳的穩定度、壓力中心的路徑軌跡、壓力中心移動速度、壓力中心面積, 實驗一開始,研究者定義達到平衡的範圍,測試的次數共10次,3次為正常的雙腳站立, 7次會加上脛骨的的神經刺激。實驗結果發現這兩組的測驗,前後側方向的穩定度是有 明顯的差異,而慢性腳踝扭傷的組別需要較多的時間來回到穩定的範圍。 李燕茹(2007)評估三度空間加速規與測力板在靜態平衡測量之間的相關性,使用 的三度空間加速規為RT3,是由美國的Stayhalthy 公司所出產,利用測量三軸的加速度, 經由公式算出三軸的活動次數( activity count),計算後所得到的參數為前後(X軸)、左右
(Y軸)、垂直(Z軸)三個方向的活動次數,再將這三個方向的加速度綜合整理,可以得到 一個向量的數值。受試者為20位年輕健康的大學生(平均年齡22.50±2.37歲),過去半年沒 有任何會影響平衡的疾病或傷害。研究方式是讓受試者佩戴RT3於下背部及慣用腳的 髖、膝、踝關節等四個位置並同時站立在測力板上,進行前後腳站立、張眼及閉眼單腳 站立三種平衡測試,各持續20秒。研究結果發現:不論是哪一個測試,RT3 在下背部、 髖關節及膝關節與測力板的速度參數呈現中到高度的相關性( r=.50~.85, p<.05),RT3 在 下背部、髖關節及膝關節也與測力板軌跡及面積呈現顯著相關(r=.49~74, p<.05),因此推 論RT3可以適度的評估靜態平衡測試,但需要考量配戴的位置,因為在三次的測試中, 下背部所偵測到的數據都是最小的,髖關節次之,其次為踝關節,膝關節所偵測到的數 據為最大。考慮配戴的位置才能讓平衡能力的評估更趨完善。 一般來說,足底的壓力中心(COP)在空間和時間方面,分別可以利用它的軌跡、移 動速度來評估一個人的單腳站立時,為了保持平衡而表現出來的動作控制,而這樣的方 式用來偵測踝關節不穩定的患者其動作控制可能會缺乏靈敏度。Time-to-boundary (TTB) 是個改良的計算方式,運用COP的時間和空間的綜合運算,可以用來評估踝關節不穩定 的患者的動作控制。McKeon 與 Hertel (2008)以32個踝關節不穩定的患者和32個健康的 人分別分為兩組,以測力板得知COP的軌跡和相對應的時間,再以TTB的方式處理每一 點瞬時間的參數(d/v),結果發現在閉上眼睛的情況下,踝關節不穩定的組別比起健康組 有著明顯的缺失。
Korpelainen等 (2005)評估當身體靜止站立時,以測量傾斜角度的方法測量身體的擺 盪情況是否達到效度及重現性。評估重現性時,以51位年邁的女士為受試者(年齡為72 到74歲),在同一項的評估中完成兩次的數據;評估效度時,以29位年邁的女士為受試 者(年齡為69到86歲),同時佩帶傾斜儀器在下背部接近薦椎的部位,並且站立在測力板 上接受靜態測試。結果傾斜儀器的再測信度是相當高的,偏移長度的確定係數(coefficient of determination)為0.683,而傾斜儀器的偏移長度與測力板上的數值相比較,左右偏移 量:確定係數= 0.466;前後偏移的確定係數= 0.694;兩軸總合的偏移量其確定係數= 0.623。依照上述結果,測量傾斜角度的信度是可以預期的,對於身體的擺盪情況將精確 且有效的評估靜態平衡的能力。 身體維持平衡主要是視覺(vision)、本體覺及前庭覺(vestibular sensation),三大感覺
系統的輸入與整合才能讓身體有效的維持平衡(Riemann & Lephart, 2002),為了讓研究可
以針對本體覺進行檢測,所以在實驗中會讓受試者戴上眼罩和耳罩來排除視覺及前庭覺 的回饋(黎俊彥等,2004)。其中視覺回饋的效果更能幫助本體感覺,Isakov 與 Mizrahi (1997),探討有無踝關節扭傷的單腳站立時,其視覺的代償的影響為如何。受試者為 八位受試者,皆為女子競技體操選手,平均為16.2歲(從14-18歲),優勢腳皆在於右側, 受試者曾經有過三次腳踝inversion的經驗。測試儀器為測力板(Kistler Z-4305, Winterthur, Switzerland),測試方式為單腳站立,分別以傷腳、健腳和開眼、閉眼的不同項目進行測 試,結果得知,無論是在健腳或患腳,閉眼時所測的反作用力較開眼來得強。邱沛雯、
李振鴻、陳淑雅與林秀真(2007),特別針對視覺的代償進行研究,了解視覺對不同年 齡層靜態姿勢穩定度的影響。研究結果發現視覺輸入對維持平衡的重要性,有隨著年齡 增加而增強的趨勢。顯示隨老化產生的前庭與本體感覺衰退,為了平衡功能的維持,可 能由增加視覺依賴而代償。 統整上述的研究可以發現在進行靜態平衡能力的評估時,視覺代償的影響實是不容 小覷,受試者在排除視覺的回饋時,更容易單純的表現本體覺維持平衡的能力。
二、動態平衡(dynamic balance)
Wikstrom, Tillman, Smith, 與Borsa(2005)以The Dynamic Postural Stability Index
(DPSI) 的方式作平衡能力的檢測,受試者是18位沒有任何的下肢受傷的健康受試者,
受試者站在距測力板前的70公分,受試者用雙腳跳起時以單手碰觸頭上的標的物
(marker),標的物放置的位置須是受試者跳躍高度的50%,接著以規定的單腳落在測力
板上,並迅速保持平衡,落地時間為10秒。實驗的結果為intraclass correlation coefficient
= .96,表示DPSI用來檢測單腳跳躍的穩定是相當精確及有信度的。
Olmsted, Carcia, Hertel, 與Shultz(2002)利用the Star Excursion Balance Tests (SEBTs),
進行下肢觸及檢測。受試者分別有兩組,一組是20名有單側踝關節不穩定的受試者,平
受試者站在已畫記的地板上,測驗下肢可達範圍,使用the SEBTs,測驗中以支撐腳站 在中心點,另一腳沿著其中一方向延伸,盡最大努力達觸及最遠距離,共測量八個方位, 像米字型,如圖2-2,每個方位測三次,再行平均,以跨步平均值除以腿長( 腿長百分比) 做為比較之標準。實驗的結果發現,患者的組別可達範圍明顯小於健者組別的可觸及的 範圍,而患者的患腳所達到的範圍也比自己健腳所達的範圍還要少,這樣的結果與平 衡、肌力所形成的穩定性有很大的關係。
圖2-2、Star Excursion Balance Tests的8個方向(Olmsted 等, 2002)
顏 秀 如 (2008) 更 進 一 步 的 比 較 Dynamic postural stability index(DPSI) 和 the Star
Excursion Balance Tests (SEBTs),以非運動員與跆拳道選手各10名為受試者,檢驗這兩
種方式應用於踝關節不穩定的成效如何。實驗結果發現:雖然DPSI無法分辨出受傷程度
平衡能力衰退的現象,亦可以分辨出專項選手不同動態平衡的優勢。相反的,SEBT測 試無法辨識有長期訓練的運動員傷、健側差異,亦無法分辨專項選手與有運動習慣的一 般人的動態平衡上的差異。因此在檢測不同族群的受試者時,要考慮受試者的條件和測 試方法的適用性,才可以有效地檢測踝關節是否穩定。 更有新穎的儀器可以進行靜態和動態的平衡測試,電腦平衡儀(SMART Balance Master)即利用測力板和電腦的組合,因為測力板本身可以設定干擾的動作,所以可以評 估受試者的靜態和動態的平衡能力。測力板(dual forceplate)前置有螢幕、周圍置有隔板,
主要裝置由力板( forceplate)、放大器( charge amplifier) 及電腦分析軟體,放大器的功能
是要讓力板的電荷訊號(charge signal)經過放大器轉換成類比訊號( analog signal),以便讓
類比數位轉換器轉換成數位訊號供電腦處理資料。受試者可以直接注視螢幕,讓電腦引 導下一步的動作,可以測得腳底對地面之三個軸向作用力、衝量、力矩、摩擦力、壓力 中心等(林育群,2005)。
笫五節 文獻回顧之綜合探討
由上述文獻探討中得知,身體的活動需要統整身體肢體知覺和環境的訊息,這些均 依賴本體感覺受器的作用。本體感覺受器接收外力刺激所產生的訊息並傳送到中樞神經 系統,中樞神經系統依照所得到的訊息,傳出動作訊息至運動單位進行協調和反應。本體感覺的主要功能是一個保護關節組織的回饋機制,關節損傷與韌帶缺損會對本體感覺 受器造成損害,當本體感覺受器受傷時,會造成不當的傳出反應,使得運動單位無法正 確完成動作,容易造成傷害。本體感覺是平衡控制中的重要一環,本體感覺能力是否受 損會直接影響平衡控制能力。就踝關節而言,扭傷之後可能由於本體感覺的缺失使得踝 關節容易重複性的扭傷,形成所謂的功能性踝關節不穩定,踝關節不穩定容易產生運動 傷害或二次傷害。為了精確的評估踝關節的功能和穩定性,使用的測量儀器和評估方法 也相對重要。
本體感覺可以分為三大項:運動覺(kinesthesia)、關節位置覺(joint position sence)和
力量覺(sence of force)( Riemann & Lephart , 2002)。而現階段檢驗踝關節的功能,除了可
以檢測上述三種感覺來評估踝關節是否扭傷,也採用下肢平衡能力的檢測來確認。力量
覺的檢測,只需測力器即可進行踝關節力量覺的評估,而且該儀器擁有簡便、經濟又高
信效度的特點(Dover & Powers, 2003),但是踝關節扭傷的研究針對力量覺來進行評估的
文獻相當缺乏,所以實驗中將評估測力器是否可以評估踝關節扭傷者和健康者的差異。 平衡的能力是綜合本體感覺的表現,常以靜態平衡作為踝關節扭傷的評估,較少討論動 態平衡的檢測,但在實際的運動中,扭傷的情況通常是伴隨著動態活動而發生。因此希 望藉由這次的研究,評估力量覺和動態平衡,之後將進一步了解力量覺、靜態平衡、動 態平衡和關節位置覺的數據是否有其相關性,以確定力量覺和動態平衡對於評估踝關節 扭傷的適切性。
第三章 研究方法
第一節
研究對象
本實驗之研究對象共有22位受試者參與(9位健康受試者,13位踝關節扭傷受試者), 所有的受試者在進行實驗前,需要了解實驗目的、實驗方法、實驗流程及注意事項,並 且簽署同意書。 一、收案條件: 健康受試者的條件為:未曾發生踝關節扭傷。 踝關節扭傷受試者的健康情況至少以四種準則來判別受試者是否有踝關節扭傷的 徵兆 (Kaminski 等, 1999): 1、 過去至少一年內曾經經歷過明顯的踝關節外側韌帶(inversion)扭傷,患者的扭傷 腳在這一年內無法承載自己的體重或是必須依賴枴杖。 2、 踝關節沒有骨折或是重大傷害的紀綠。 3、 扭傷腳持續至少二次重複性扭傷。 4、 患者扭傷腳未曾接受任何正式或非正式的治療。5、 無明顯踝關節功能性不穩定(function ankle instability)的情形。
所有的受試者如果有以下的情況,便排除進行實驗的評估。 1、在實驗前一個月內曾經發生踝關節扭傷。 2、下肢曾經有開刀的病史。 3、神經性的疾病。 4、下肢肌肉骨骼病史。 5、糖尿病。 6、有其它會影響平衡的原因(像是單側或者是不對稱的聽力損失、耳鳴和頭暈)。
7. 有明顯踝關節功能性不穩定(function ankle instability)的情形。
第二節
實驗時間與地點
一、施測地點:台中市太平國民小學
第三節
實驗器材與設備
一、徒手測力器(MicroFet 2 manual muscle tester)
使用MicroFet 2 (HOGGAN Health Industries, America),如圖3-1,利用該儀器來測量
受試者的踝關節evertor、plantar flexor with knee flexion和plantar flexor的肌力。
圖 3-1、徒手測力器
二、自製踝關節角度評估儀器,如圖3-2,使用該儀器來評估受試者踝關節的角度。
三、測力板(zebris FDM-S)(Noraxon, America),如圖3-3,評估受試者動態平衡和靜態平
衡。
圖 3-3、Zebris測力板
四、眼罩:阻斷視覺輸入,以避免對本體覺或平衡產生影響。
第四節
實驗方法與步驟
本研究主要的測量變項如下:
(一)、踝關節進行plantar flexor(直膝及屈膝)及evertor肌力重現(Force reproduction, FR)
的評估。
(二)、踝關節進行plantar flexion及inversion動作之主動關節復位測試(active reposition
test)的評估。 (三)、單腳站立靜態平衡及動態下階平衡的評估。 為了建立確定檢測儀器及操作者之信度,本研究先行對測力器、自製踝關節角度評 估儀器進行前測,檢驗該儀器是否達到信度,之後再以確定後的流程進行實驗。 一、 步驟流程 (一)受試者準備事項: 受試者在進行實驗前,需要了解實驗目的、方法、流程及注意事項,並且簽署同意 書。在進行實驗時,穿著輕便服裝,以赤腳進行檢測,於腳踝的關節貼上感應標誌(Marker) 以便攝影軟體的定位。 (二)實驗儀器的設置:
1、完成測力板的相關設置,啟動測力板儀器和對應的電腦主機。
2、自製踝關節角度評估儀器放置在攝影機可以進行拍攝的範圍,攝影機架設於受試者
前2公尺。
(三)踝關節肌力重現的評估:
1、受試者測試evertor、plantar flexor和plantar flexor with knee flexion(控制膝蓋彎曲約
90度)的最大自主等長收縮(Maximal Voluntary Isometric Contraction, MVIC)。
2、依照受試者最大自主等長收縮的數據分別擬定 30 和 50%的 MVIC(Docherty & Arnold,
2008; Dover & Powers, 2003)。
圖3-5 plantar flexor 肌力的測試
圖3-6 plantar flexor with knee flexion 肌力的測試
3、引導受試者模擬一次指定的肌力(例如30%MVIC),並維持該肌力達5秒,感受施
力的感覺。
4、戴上眼罩和耳機(確認播放音樂)。
6、以上述3~5的步驟完成6種特定的肌力。
(四)主動關節復位測試(active reposition test):
1、受試者坐在指定的椅子上,調整座位的高度。 2、受測腳套上泡泡紙(Stuffing)。 3、小腿垂直落下,腳掌放置在自製踝關節角度評估儀器的中央。第三趾對準中心線, 腳掌長度的1/2處置於中心點,位置完成後綁上固定帶。 4、調整椅子和自製踝關節角度評估儀器的高度和距離,讓膝關節保持在90度。 5、測量受試者受測腳的踝關節最大inversion和plantar flexion的角度。 6、將其最大inversion和plantar flexion的角度各減掉5度作為指定主動角度的復位的角度。 7、引導受試者練習一次指定的inversion角度,並維持該角度達10秒。 8、戴上眼罩和耳機(確認播放音樂)。 9、請受試者做出三次指定的inversion角度,同時間攝影機、和自製踝關節角度評估儀器 進行記錄。 10、受試者動作停止後,待施測者記錄,即可放開。 11、對於指定的plantar flexion的角度重複上述6~9的步驟。
圖 3-7、plantar flexion 位置覺的測試 圖 3-8、inversion 位置覺的測試
(五)、下肢靜態平衡能力的評估: 1、受試者戴上眼罩和耳機(確認播放音樂)。 2、受試者脫鞋後以受測腳站在測力板上,保持雙手交叉抱胸,對側腳的膝蓋儘量保持 45度,髖關節保持30度。 3、動作達到既定的標準就開始測試,測試時間10秒鐘,期間身體靜止不動。 4、受試者以閉眼單腳(受測腳)站立,測得重心位移的數據。 5、測驗中受試者的對側腳如果接觸到地板,或者沒有辦法在10秒鐘內保持站立的姿勢, 這次的測驗就會終止,在休息後再重複這一次的試驗。 6、受試者一旁會有專人注意實驗的動作,而測力板的旁邊也放置軟墊,以防受試者不 慎從測力板上落下,所以受試者並無安全性的顧慮。
(六)、下肢動態平衡能力的評估: 1、受試者戴上眼罩和耳機(確認播放音樂)。 2、受試者脫鞋後以非受測腳站在10cm的高臺上,保持雙手交叉抱胸,對側腳往前抬起, 作預備落下的動作。 3、動作達到既定的標準就開始測試,由施測者下口令,讓受試者從高臺往前落下,測 試時間10秒鐘,期間身體靜止不動。 4、受試者以閉眼單腳(受測腳)站立,測得重心位移的數據。 5、測驗中受試者的對側腳如果接觸到地板,或者沒有辦法在10秒鐘內保持站立的姿勢, 這次的測驗就會終止,在休息後再重複這一次的試驗。 6、受試者一旁會有專人注意實驗的動作,而測力板的旁邊也放置軟墊,以防受試者不 慎從測力板上落下,所以受試者並無安全性的顧慮。 圖 3-9、靜態平衡的測試 圖 3-10、動態平衡的測試
(七) 本體覺測試方式的再測信度 表2-1、本體覺測試方式的再測信度 本體覺測試方式 再測信度之相關(ICC值) 位置覺 plantar flexion .848* inversion .767* 力量覺
30% MVIC plantar flexor .857*
50% MVIC plantar flexor .760*
30% MVIC plantar flexor
with knee flexion
.815*
50% MVIC plantar flexor
with knee flexion
.775*
30% MVIC evertor .635*
50% MVIC evertor .758*
二、本研究之實驗流程如圖3-11所示 受試者了解實驗目的、方法、 流程及注意事項,並且簽署同 意書及個人基本資料。 依照收案條件 選取合適的受試者。 實驗儀器的設置: 測力板、測力器、攝影機、 自製踝關節角度評估儀器。 踝關節 肌力重現的評估 下肢平衡能力的評估 踝關節 關節位置覺的評估 (攝影機同步記錄) 資料處理與分析 圖 3-11、實驗流程圖
第五節 資料處理與統計分析
力量覺的測試數值減去預估測量之施力值,其絕對值為絕對誤差,將同一施測項目
的三次絕對誤差進行平均,獲得的絕對誤差平均數即為力量覺作為統計分析的研究結
果;位置覺的資料處理和力量覺一樣,以測試數值減去預估測量之角度,取其絕對值再
進行平均,獲得的絕對誤差平均數即為代表位置覺的實驗數據;平衡能力測量後,經由
軟體 WinFDMS Video Stance v1.1.1 進行運算,取其重心軌跡與橢圓面積的數據進行統
計分析。
本研究以SPSS 12.0 for Windows作為實驗數據的統計分析,α值=0.05為達顯著差異。
一、以描述性統計(descriptive statistics)建立受試者基本資料。
二、以獨立樣本t檢定(independent sample test)比較靜態平衡測試,健腳與扭傷腳之差異。
三、以獨立樣本t檢定(independent sample test)比較動態平衡測試,健腳與扭傷腳之差異。
四、以獨立樣本t檢定(independent sample test)比較肌力重現測試,健腳與扭傷腳之差異。
五、以獨立樣本t檢定(independent sample test)比較主動關節復位測試,健腳與扭傷腳之
差異。
六、以皮爾遜積差相關統計法(Pearson product-moment correlation),將患者的動、靜態
平衡測驗的重心軌跡與橢圓面積,與其肌力重現測驗之誤差及主動關節復位之誤差
第四章 研究結果
第一節 受試者基本資料
本實驗之研究對象共有22位受試者參與,分別為13名踝關節扭傷受試者與9名健康 受試者。13名踝關節扭傷受試者中,有4位受試者扭傷腳為右腳,2位扭傷腳為左腳,其 餘的7位的雙腳皆為扭傷腳,一共有20個受傷的腳踝。所有受試者皆完成靜、動態平衡 測試,以及踝關節的力量覺和位置覺的測試。受試者基本資料包括平均年齡為21.00 ± 1.88歲(範圍介於18~25歲)、平均身高為166.00 ± 11.31公分(範圍介於147~187公分)、 體重為59.27±12.40公斤(範圍介於38~92公斤),男性占9人,而女性占13人。基本資料以 受試者最大值、最小值、平均數及標準差來呈現,如表4- 1。 表 4-1、受試者基本資料 個數 平均數 標準差 最小值 最大值 受試者年齡 22 21.00 1.88 18.00 25.00 受試者身高 22 166.00 11.31 147.00 187.00 受試者體重 22 59.27 12.40 38.00 92.00第二節 扭傷腳與健腳在位置覺測試中之角度誤差
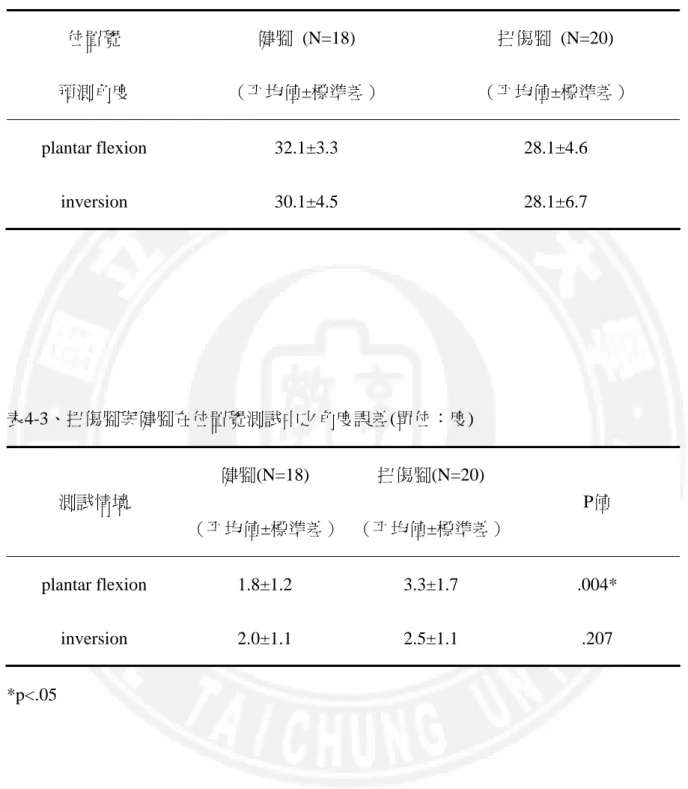
在位置覺的測試中,以自製踝關節角度評估儀器先對受試者的踝關節分別測量出 plantar flexion和inversion的最大角度,各角度減去5度,即是預定要測試的角度,詳細資 料以平均數及標準差來呈現,如表4-2。 在 plantar flexion 方面,健腳之誤差角度(1.8°±1.2°)顯著少於扭傷腳之誤差角度 (3.3°±1.7°)( p<.05)。但在 inversion 的測試當中,雖然健腳之誤差角度皆少於扭傷腳之誤 差角度,但是卻無顯著差異( p>.05)。詳細資料列於表 4-3。表 4-2、扭傷腳與健腳在位置覺測試中之預估測量之角度(單位:度) 位置覺 預測角度 健腳 (N=18) (平均值±標準差) 扭傷腳 (N=20) (平均值±標準差) plantar flexion 32.1±3.3 28.1±4.6 inversion 30.1±4.5 28.1±6.7 表4-3、扭傷腳與健腳在位置覺測試中之角度誤差(單位:度) 測試情境 健腳(N=18) (平均值±標準差) 扭傷腳(N=20) (平均值±標準差) P值 plantar flexion 1.8±1.2 3.3±1.7 .004* inversion 2.0±1.1 2.5±1.1 .207 *p<.05
第三節 扭傷腳與健腳在力量覺測試中之力量誤差
在力量覺的測試中,以測力器對受試者的踝關節分別測量最大施力(MVIC),最大施
力值的30%和50%,即是預定要測試的施力值,詳細資料以平均數及標準差來呈現,如
表4-4。在6項力量覺的測試裡,包括plantar flexor 30% MVIC、plantar flexor 50% MVIC、
plantar flexor with knee flexion 30% MVIC、plantar flexor with knee flexion 50% MVIC、
evertor 30% MVIC和evertor 50% MVIC都到達顯著,扭傷腳的平均值皆顯著大於健腳的
表 4-4、扭傷腳與健腳在力量覺測試中預估測量之施力值(單位:磅) 測試情境 健腳(N=18) (平均值±標準差) 扭傷腳(N=20) (平均值±標準差) plantar flexor 30% MVIC 16.56±2.31 17.68±3.94 50% MVIC 27.60±3.86 29.47±6.56
plantar flexor with knee flexion 30% MVIC 13.05±3.53 16.05±2.14 50% MVIC 21.75±5.88 26.77±3.57 evertor 30% MVIC 11.46±2.18 11.62±2.45 50% MVIC 19.08±3.63 19.34±4.19 MVIC:最大主動等長收縮
表4-5、扭傷腳與健腳在力量覺測試中之力量誤差(單位:磅) 測試情境 健腳(N=18) (平均值±標準差) 扭傷腳(N=20) (平均值±標準差) P值 plantar flexor 30% MVIC 1.94±1.26 4.32±2.93 .003* 50% MVIC 2.41±1.32 5.29±3.29 .001*
plantar flexor with knee flexion 30% MVIC 1.57±.99 3.71±2.46 .001* 50% MVIC 1.99±1.20 5.28±5.52 .018* evertor 30% MVIC 1.83±1.18 4.23±3.01 .003* 50% MVIC 2.00±1.04 3.97±3.23 .017* *p<.05;MVIC:最大主動等長收縮
第四節 扭傷腳與健腳在平衡測試中之結果
由表 4-6 可以得知:在檢測的項目中,包括靜態平衡的重心軌跡和橢圓面積,以及 動態平衡的重心軌跡和橢圓面積,這些項目皆顯示扭傷腳的數值皆大於健腳的數值,且 達到統計上的顯著(p<.05)。 表 4-6、扭傷腳與健腳在平衡測試中之結果 測試情境 健腳(N=18) (平均值±標準差) 扭傷腳(N=20) (平均值±標準差) P值 靜態平衡 重心軌跡(mm) 526.96±95.51 750.62±258.39 .001* 橢圓面積(mm*mm) 374.74±106.04 590.98±285.84 .005* 動態平衡 重心軌跡(mm) 709.72±105.06 890.34±217.34 .003* 橢圓面積(mm*mm) 590.43±127.60 820.97±269.18 .002* *p<.05第五節 位置覺測試與平衡測試之相關性
這個部分以扭傷腳的位置覺測試和平衡測試的研究結果進行比較,研究結果的資料 列於表4-7,發現位置覺測試與平衡測試的比較皆未達到顯著的相關。 表 4-7、位置覺測試與平衡測試之相關性 靜態平衡 動態平衡 Pearson 相關 重心軌跡 (mm) 橢圓面積 (mm*mm) 重心軌跡 (mm) 橢圓面積 (mm*mm) plantar flexion -.317 -.388 -.265 -.314 inversion -.185 -.202 -.215 .054第六節 力量覺測試與平衡測試之相關性
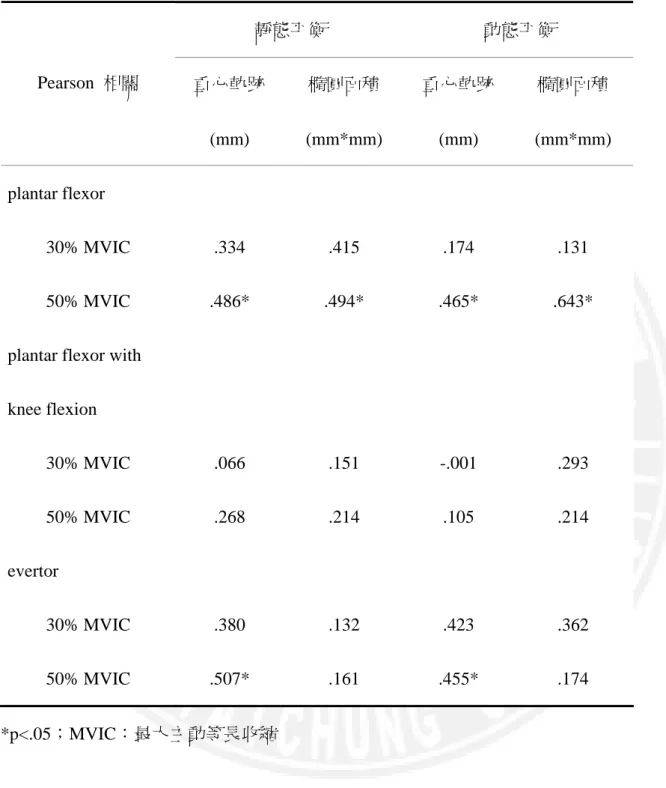
這個部分以扭傷腳的力量覺測試和平衡測試的研究結果進行比較,研究結果的資料
列於表4-8。力量覺的plantar flexor50% MVIC和所有平衡測試的參數,其中包括靜態平
衡的重心軌跡和橢圓面積,以及動態平衡的重心軌跡和橢圓面積,達到中度相關
(p<.05),而在evertor 50% MVIC 中則是和靜、動態平衡的重心軌跡達到中度相關
(p<.05)。表中的資料顯示,plantar flexor with knee flexion 這種方向的力量覺測試皆沒有
表 4-8、力量覺測試與平衡測試之相關性 靜態平衡 動態平衡 Pearson 相關 重心軌跡 (mm) 橢圓面積 (mm*mm) 重心軌跡 (mm) 橢圓面積 (mm*mm) plantar flexor 30% MVIC .334 .415 .174 .131 50% MVIC .486* .494* .465* .643*
plantar flexor with
knee flexion 30% MVIC .066 .151 -.001 .293 50% MVIC .268 .214 .105 .214 evertor 30% MVIC .380 .132 .423 .362 50% MVIC .507* .161 .455* .174 *p<.05;MVIC:最大主動等長收縮
第五章 討論
第一節 扭傷腳與健腳在位置覺測試中之差異
本 研 究 的 目 的 之 一 在 探 討 外 側 踝 關 節 扭 傷 者 與 正 常 人 在 位 置 覺 (plantar flexion/inversion)之差異,以了解力量覺的檢測對於評估踝關節扭傷的適切性。於表4-2, 可以發現健腳的角度平均大於扭傷腳,這個部分可能是因為腳踝扭傷的時候,會有局部 壓痛(tenderness)、瘀血(ecchymosis)和水腫(swelling)的現象,所以在復元期間患 者不會去作踝關節的運動,所以容易提升該處的緊度(王碧宗、紀忠呈,2001),此外 受試者雖然在這一個月內沒有再度的受傷,但是在心理部分,可能會對於踝關節的動作 有所害怕,所以才導致這樣的研究結果。在表4-3的研究結果顯示,扭傷腳和健腳在位 置覺的測試上在plantar flexion的項目達到顯著差異,而inversion的項目卻沒達到顯著差 異,這個部分可能顯示出位置覺的測試並沒有辦法有效的測量踝關節的健康情況,因為 扭傷腳在痊癒之後,可能在位置覺的感受能力已經有所回復。 關節扭傷後容易造成肌肉、肌腱甚至於骨骼、關節囊、韌帶的破壞,本體感覺受器 受損後,造成於神經的連接斷裂,更會失去原來的功能,所以偵測關節位置和角度的功 能也下降。國內的學者康福仁(2002)以Biodex 等速肌力測量儀進行量測本體感覺功 能的測驗,比較8位單側功能性踝關節不穩定者與8位正常受試者,發現功能性踝關節不穩定者其患腳之整體關節不管是在被動復位或是主動復位之實驗中上,其誤差角度明顯 大於正常人,進而推斷功能性踝關節不穩定者其患側腳之本體感覺的位置覺較正常人 差。這是因為功能性不穩定腳踝由於本體感覺的缺失,有可能使受傷關節傳往中樞的傳 入訊息受到影響,進而影響高層中樞神經系統的功能,造成神經肌肉控制的缺失,間接 產生動作控制缺失的問題,所以較嚴重的踝關節傷勢會使得功能性不穩定的情形發生。 Caulfield和Garrett(2004)認為功能性踝關節不穩定造成位置知覺的缺陷,也因此造成 前饋控制無法正確的讓踝關節產生預期的正確動作,所以在實驗中以落地後的反作用力 來比較功能性踝關節不穩定的組別和健康組的參數,採用測力板(Bertec force-plate)進行 實驗。受試者以非受測腳站在40cm的高臺上,另一受測腳放鬆而不支撐身體重量,接著 非受測腳用力讓身體往前落下,以受測腳落至測力板的中間。實驗所獲得的參數是由著 地後的150ms所擷取,以反作用力佔受試者體重的比率作為表現的參數進行比較,研究
結果顯示這兩組在橫向及前向的反作用力高峰的時間點(timing of peak ground reaction
force)皆達到顯著差異,這樣的結果可能是由於在落地的前期,踝關節因為位置知覺的 缺陷而沒有辦法採取理想的姿勢吸收落地的衝擊(Konradsen, 2002),由於功能性踝關節 不穩定的患者會出現失調的施力形式,所以在患者進行跳躍後著地的動作,在踝關節的 壓力也會較一般人來得高,導致患者更容易出現重複性的傷害。 動作的反應通常可以分成三種類型的動作控制:脊髓的反射動作、腦幹的活動以及 認知的程序,而這種偵測關節的位置以及評估關節位置的重現就是運用人體最高層級的