混合車流模擬技術研發
- 機車行為研究
著者:黃家耀、李子璋、陳彥佑、劉品均、羅湘盈
、廖家慧、羅聖學、曾家瑜、黃維皓
執行單位:國立交通大學
委託機關:交 通 部
中華民國 104 年 12 月 31 日
目錄
第一章 計畫簡介 ... 1 1.1 研究背景 ... 1 1.2 研究目的及範圍 ... 1 1.3 工作內容與研究方法 ... 3 1.4 預期成果 ... 4 第二章 文獻回顧 ... 5 2.1 機車跟車與變換車道行為 ... 5 2.2 實體設施對混合車流之影響 ... 7 2.3 車輛疏解特性 ... 8 2.3.1 汽車疏解 ... 9 2.3.2 機車專用道之機車疏解 ... 9 2.3.3 混合車流之車輛疏解 ... 10 2.4 小結 ... 11 第三章 研究架構 ... 12 3.1 研究議題描述 ... 13 3.2 實證分析與歸類方式 ... 18 3.3 模式驗證方式 ... 20 3.3.1 模擬驗證流程 ... 21 3.3.2 驗證指標 ... 21 3.3.3 驗證工具 ... 23 3.4 小結 ... 28 第四章 資料蒐集 ... 29 4.1 影像收集 ... 29 4.1.1 拍攝方式 ... 29 4.1.2 現場及室內作業 ... 31 4.2 調查地點 ... 33 4.2.1 調查地點—四車道 (D 與 E) ... 36 4.2.2 調查地點—三車道 (G) ... 39 4.2.3 調查地點—二車道 (H、J 與 K) ... 41 4.2.4 調查地點—兩段式左轉路口 (L 與 M) ... 464.3.1 調查地點—四車道(D 與 E) ... 54 4.3.2 調查地點—三車道(G) ... 55 4.3.3 調查地點—二車道(H、J 與 K)... 56 4.3.4 調查地點—兩段式左轉路口(L 與 M) ... 57 4.3.5 調查地點—非兩段式左轉路口(N 與 O) ... 58 4.4 校估用資料 ... 58 4.4.1 車流軌跡擷取方式 ... 58 4.4.2 資料統計 ... 61 4.4.3 混合車流密度計算 ... 70 4.5 驗證用資料 ... 74 4.5.1 驗證指標 ... 74 4.5.2 資料統計 ... 76 4.6 小結 ... 83 第五章 實證分析及模式建構 ... 85 5.1 機車之車道選擇行為與橫向位置選擇之行為模式 ... 85 5.1.1 研究問題定義 ... 85 5.1.2 實證分析 ... 87 5.1.3 模式建構 ... 88 5.1.4 模式驗證及敏感度測試 ... 93 5.2 機車對公車靠離站與路側停等車輛之反應行為模式 ... 95 5.2.1 研究問題定義 ... 95 5.2.2 實證分析 ... 96 5.2.3 模式建構 ... 106 5.3 機車路口停等位置選擇模式 ... 119 5.3.1 研究問題定義 ... 119 5.3.2 實證分析 ... 120 5.3.3 模式建構 ... 122 5.4 路口疏解時間模式 ... 126 5.4.1 研究問題定義 ... 126 5.4.2 實證分析 ... 127
6.2 與路段相關之模式 ... 139 6.3 與路口相關之模式 ... 142 6.4 小結 ... 144 第七章 結論與建議 ... 145 7.1 結論 ... 145 7.2 建議 ... 146 參考文獻 ... 148 附 錄 ... 152 附錄 A: 混合車流模擬技術研發-機車行為研究,調查地點計畫書 ...A1 附錄 B: 機車行為模式在都市混合車流中之實証分析及模式建立,調查地點幾何型態 ... B1 附錄 C: 模擬軟體在交通安全評估的應用 ... C1 附錄 D: 期中審查意見回覆 ...D1 附錄 E: 期末審查意見回覆 ... E1
圖目錄
圖 1.1 整體架構圖 ... 2 圖 1.2 研究流程圖 ... 4 圖 3.1 研究架構圖 ... 12 圖 3.2 車輛通過路段時的車頭橫向位置分佈 ... 14 圖 3.3 利用微觀車流模擬器(VISSIM)產生的車頭橫向位置分佈 ... 14 圖 3.4 不同車流密度下的車頭橫向位置分佈 ... 15 圖 3.5 公車靠站示意圖 ... 15 圖 3.6 機車轉向的方向與路口停等位置選擇關係示意圖 ... 17 圖 3.7 機車橫向偏移示意圖 ... 20 圖 3.8 模式模擬驗證流程圖 ... 21 圖 3.9 Bikesim 的車流模擬畫面 ... 24 圖 3.10 BikeSim 操作介面 ... 25 圖 3.11 模擬控制介面 (檔案輸入-基本資料及軌跡資料庫讀取) ... 26 圖 3.12 模擬控制介面 (手動輸入-基本資料讀取) ... 26 圖 3.13 模擬控制介面 (手動輸入-道路交通量資訊界面) ... 26 圖 3.14 動畫顯示調整介面 ... 27 圖 3.15 產生車輛說明 ... 27 圖 3.16 車流模擬軟體模擬畫面 ... 28 圖 4.1 空中拍攝實景 ... 30 圖 4.2 影片穩定效果 ... 33 圖 4.3 影片後製效果 ... 33 圖 4.4 影片亮度對比調整效果 ... 33 圖 4.5 調查地點 D 與 E(台北市羅斯福路一段)地理位置 ... 36 圖 4.6 調查地點 D 與 E(台北市羅斯福路一段)空拍圖 ... 36 圖 4.7 調查地點 D 與 E(台北市羅斯福路一段)幾何型態示意圖 ... 37 圖 4.8 調查地點 G(新竹市慈雲路)地理位置 ... 39 圖 4.9 調查地點 G(新竹市慈雲路)空拍圖 ... 39 圖 4.10 調查地點 G(新竹市慈雲路)幾何型態示意圖 ... 40 圖 4.11 調查地點 H(新北市雙十路二段)地理位置 ... 41 圖 4.12 調查地點 H(新北市雙十路二段)空拍圖 ... 42 圖 4.13 調查地點 H(新北市雙十路二段)幾何型態示意圖 ... 42 圖 4.14 調查地點 J 與 K(新北市中正路)地理位置... 44圖 4.19 調查地點 M(小東路上與林森路交叉之路口,西向東)空拍圖 ... 46 圖 4.20 調查地點 L(小東路上與林森路交叉之路口,東向西) 幾何型態示意圖 ... 48 圖 4.21 調查地點 M(小東路上與林森路交叉之路口,西向東) 幾何型態示意圖 ... 48 圖 4.22 調查地點 N 與 O(青年路上與慶東街交叉之路口)地理位置 ... 50 圖 4.23 調查地點 N(青年路上與慶東街交叉之路口,東向西)空拍圖 ... 50 圖 4.24 調查地點 O(青年路上與慶東街交叉之路口,西向東)空拍圖 ... 51 圖 4.25 調查地點 N(青年路與慶東街交叉口,東向西) 幾何型態示意圖 ... 52 圖 4.26 調查地點 O(青年路與慶東街交叉口,西向東) 幾何型態示意圖 ... 52 圖 4.27 所擷取之車流資料與原影像套繪 ... 59 圖 4.28 以動畫呈現車流 ... 60 圖 4.29 時空佔有率示意圖 ... 70 圖 4.30 時空佔有率和流量之關係(地點 H、地點 J、地點 K) ... 72 圖 4.31 時空佔有率和流量之關係(地點 G) ... 72 圖 4.32 時空佔有率和流量之關係(地點 D、地點 E) ... 71 圖 4.33 時空佔有率和流量之關係(地點 L、地點 M) ... 73 圖 4.34 時空佔有率和流量之關係(地點 N、地點 O) ... 74 圖 4.35 路段上、中、下游位置圖(調查地點 G) ... 74 圖 4.36 公車停靠站(路側停車)影響區域圖(調查地點 E) ... 75 圖 4.37 路口資料蒐集示意圖(調查地點 L)... 75 圖 5.1 小汽車車輛橫向位置分佈 ... 86 圖 5.2 機車橫向位置分佈 ... 87 圖 5.3 各路段機車車頭分佈 ... 87 圖 5.4 機車橫向位置分布三角形示意圖 ... 88 圖 5.5 機車橫向位置分布模式之參數及變數示意圖 ... 89 圖 5.6 模式校估後三角形分佈示意圖(影片編號:E11) ... 92 圖 5.7 a 值對 RMSE 的敏感度分析 ... 94 圖 5.8 b 值對 RMSE 的敏感度分析 ... 94 圖 5.9 c 值對 RMSE 的敏感度分析 ... 94 圖 5.10 公車站範圍內機車跟車示意圖 ... 95 圖 5.11 機車閃避路側停車示意圖 ... 95 圖 5.12 機車通過公車站之移動軌跡示意圖 ... 96 圖 5.13 機車和公車之角度與距離示意圖 ... 97 圖 5.14 機車跟車公車行為之影片還原圖 ... 99 圖 5.15 車輛周圍區塊示意圖(機車對公車靠離站反應模式) ... 100 圖 5.16 車輛座標示意圖 ... 100 圖 5.17 車輛周圍區塊車輛狀態示意圖 ... 101 圖 5.18 實體公車站停靠範圍、設定欲研究公車站範圍大小 ... 102
圖 5.21 機車對路側車輛反應行為之影片還原圖 ... 104 圖 5.22 機車反應時間點分布圖 ... 105 圖 5.23 車輛周圍區塊示意圖(機車對路側停等車輛反應模式) ... 105 圖 5.24 機車跟車公車反應範圍 ... 106 圖 5.25 機車對路側停等車輛反應範圍 ... 106 圖 5.26 公車站跟車模式研究情境示意圖 ... 107 圖 5.27 各個距離變數示意圖 ... 109 圖 5.28 機車對路側停等車輛反應行為模式研究情境示意圖 ... 111 圖 5.29 各個距離變數示意圖 ... 112 圖 5.30 位置選擇決策之概念 ... 120 圖 5.31 與前方停止車輛的間距下之橫向偏移意圖的分布 ... 120 圖 5.32 前車兩側側向間距寬度與的橫向偏移決策比例 ... 121 圖 5.33 完成橫向偏移的時間長度之分布 ... 121 圖 5.34 各段停等車隊之示意圖 ... 127 圖 5.35 各週期及車道之分段停等車隊長度 ... 128 圖 5.36 各週期及車道之分段停等車輛數 ... 128 圖 5.37 各週期及車道之分段車流疏解時間 ... 129 圖 5.38 停等車輛數之示意圖 ... 131 圖 5.39 停等車隊長度之示意圖(停等區停滿機車) ... 132 圖 5.40 停等車隊長度之示意圖(停等區未停滿機車) ... 132 圖 5.41 各模式範圍之示意圖 1 ... 133 圖 5.42 各模式範圍之示意圖 2 ... 133 圖 5.43 各模式之實際調查值與模式預測值比較圖 ... 137 圖 6.1 模式模擬驗證流程圖 ... 138 圖 6.2 機車之車道與橫向位置分布圖 ... 141 圖 6.3 M10 地點週期一之停等車隊長度 ... 144 圖 6.4 M10 地點週期二之停等車隊長度 ... 144
表目錄
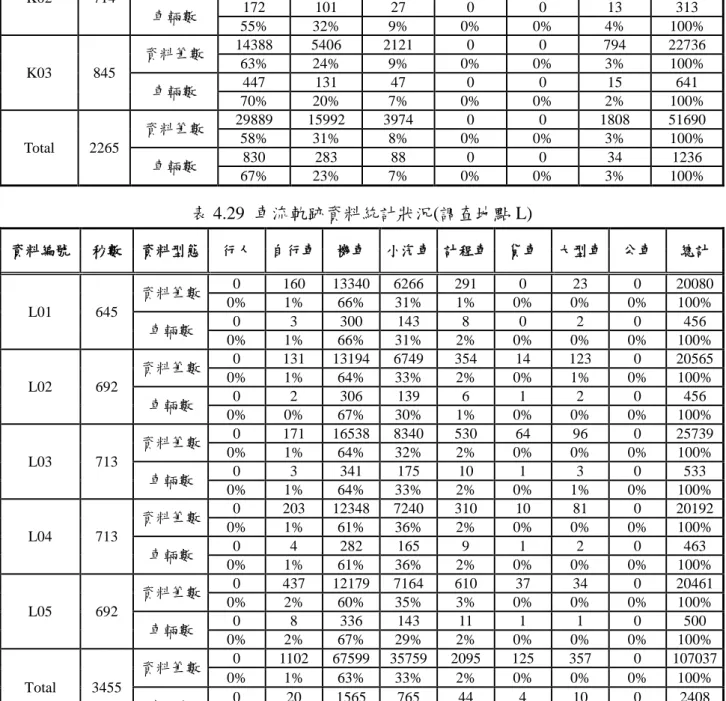
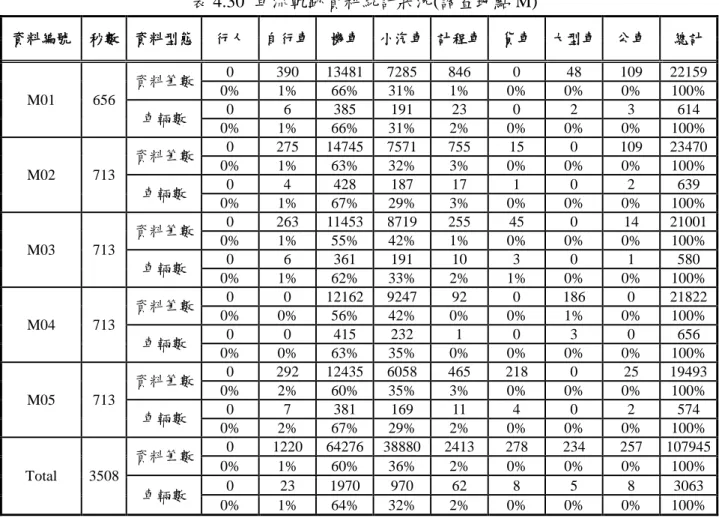
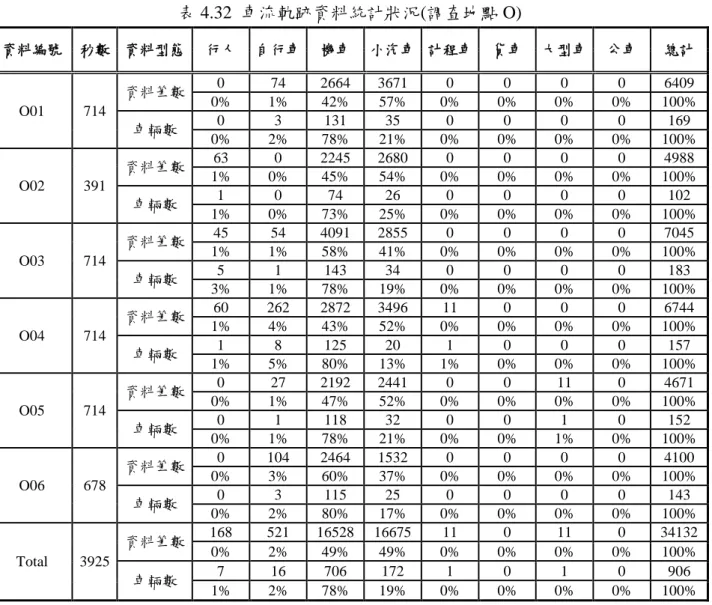
表 3.1 各問題之驗證指標對應表 ... 22 表 4.1 傳統錄影和空拍方式之比較 ... 31 表 4.2 模式與調查地點選擇準則對應 ... 34 表 4.3 調查地點(路段) ... 35 表 4.4 調查地點(路口) ... 35 表 4.5 調查地點對應之模式 ... 35 表 4.6 幾何型態彙整表(調查地點 D 與 E) ... 38 表 4.7 調查地點 G(新竹市慈雲路)幾何型態描述 ... 40 表 4.8 調查地點 H(新北市雙十路二段)幾何型態描述 ... 43 表 4.9 調查地點 J 與 K(新北市中正路)幾何型態描述... 45 表 4.10 調查地點 L 與 M 之號誌時制計畫(16:00-18:45) ... 47 表 4.11 調查地點 L 與 M 之號誌時制計畫(18:45-22:15) ... 47 表 4.12 調查地點 L 與 M(小東路)幾何型態描述 ... 49 表 4.13 調查地點 N 與 O 之號誌時制計畫 ... 51 表 4.14 調查地點 N 與 O(青年路)幾何型態描述 ... 53 表 4.15 調查小時數 ... 53 表 4.16 調查地點 D 與 E 的拍攝日期及時段整理 ... 54 表 4.17 調查地點 G 的拍攝日期及時段整理 ... 55 表 4.18 調查地點 H 的拍攝日期及時段整理 ... 56 表 4.19 調查地點 J 與 K 的拍攝日期及時段整理 ... 56 表 4.20 調查地點 L 的拍攝日期及時段整理 ... 57 表 4.21 調查地點 M 的拍攝日期及時段整理 ... 57 表 4.22 調查地點 N 與 O 的拍攝日期及時段整理 ... 58 表 4.23 車流軌跡資料統計狀況(調查地點 D) ... 62 表 4.24 車流軌跡資料統計狀況(調查地點 E)... 63 表 4.25 車流軌跡資料統計狀況(調查地點 G) ... 64 表 4.26 車流軌跡資料統計狀況(調查地點 H) ... 65 表 4.27 車流軌跡資料統計狀況(調查地點 J) ... 65 表 4.28 車流軌跡資料統計狀況(調查地點 K) ... 66 表 4.29 車流軌跡資料統計狀況(調查地點 L)... 66 表 4.30 車流軌跡資料統計狀況(調查地點 M) ... 67 表 4.31 車流軌跡資料統計狀況(調查地點 N) ... 68 表 4.32 車流軌跡資料統計狀況(調查地點 O) ... 69 表 4.33 驗證用車流軌跡資料筆數統計(調查地點 D) ... 77 表 4.34 驗證用車流軌跡資料統計狀況(調查地點 E) ... 78表 4.37 驗證用車流軌跡資料統計狀況(調查地點 J) ... 81 表 4.38 驗證用車流軌跡資料統計狀況(調查地點 K) ... 82 表 4.39 驗證用車流軌跡資料統計狀況(調查地點 L) ... 82 表 4.40 驗證用車流軌跡資料統計狀況(調查地點 M) ... 82 表 4.41 驗證用車流軌跡資料統計狀況(調查地點 N) ... 83 表 4.42 驗證用車流軌跡資料統計狀況(調查地點 O) ... 83 表 5.1 各模式使用之資料編號一覽表 ... 85 表 5.2 機車橫向位置選擇模式之校估結果(四車道) ... 91 表 5.3 機車橫向位置選擇模式之校估結果(三車道) ... 91 表 5.4 機車橫向位置選擇模式之校估結果(二車道) ... 91 表 5.5 機車橫向位置選擇模式之驗證比較 ... 93 表 5.6 x 間隔值與模式變數之敏感度分析 ... 93 表 5.7 機車受公車進站影響之案例 1 ... 97 表 5.8 機車超車公車之案例 2 ... 98 表 5.9 機車超越路側停等車輛之案例 ... 103 表 5.10 公車站跟車模式之變數與對應參數、效用函數表 ... 110 表 5.11 公車站跟車模式之虛擬變數與對應參數、效用函數表 ... 111 表 5.12 機車對路側停等車輛反應行為模式之變數與對應參數、效用函數表 ... 113 表 5.13 機車對路側停等車輛反應行為模式之虛擬變數與對應參數、效用函數表 ... 113 表 5.14 公車站跟車模式研究資料之各機車決策筆數 ... 114 表 5.15 公車站跟車模式初步校估結果 ... 115 表 5.16 公車站跟車模式修改後之校估結果 ... 116 表 5.17 機車對路側停等車輛反應模式初步校估結果 ... 118 表 5.18 機車對路側停等車輛反應模式修改後之校估結果 ... 118 表 5.19 路口停等行為模型校估結果(一) ... 124 表 5.20 路口停等行為模型校估結果(二) ... 125 表 5.21 各段停等車隊之範圍定義 ... 126 表 5.22 模式中變數之定義 ... 130 表 5.23 各模式之變數及係數預期之相關性 ... 134 表 5.24 各段車流疏解時間模式校估結果 ... 136 表 6.1 路段與公車影響區域之平均旅行時間 ... 140 表 6.2 各車道車隊長度與疏解時間比較表 ... 143
第一章 計畫簡介
1.1 研究背景
兩輪動力車 (Powered Two-Wheeler, PTW)是指使用引擎或馬達驅動的二輪車輛,臺灣的 道路交通安全規則將兩輪動力車概略分為大型重型機車、普通重型機車、普通輕型機車、小 型輕型機車、電動自行車、電動輔助自行車等種類。本研究的對象為最大時速超過每小時二 十五公里之兩輪動力車,以下統稱為機車。在臺灣,機車十分普遍,也是世界上持有率最高 的國家。以私人運具來說,機車相對小汽車有很多的優點,例如機動性高、油耗較低、使用 路面及停等空間較小等。Haworth (2012) 指出機車的使用最近受到重視;然而,目前市區道 路的設計主要以小汽車的特性為主,而機車在路面上的行為與小汽車差異甚大,但以機車為 主的車流理論及行為分析的學術研究較為缺乏,市面上之車流模擬軟體也未能充分反應國內 的混合車流特性。因此有需要發展機車的特性分析及行為模式,以期能改善國內混合車流情 況下的道路設計及安全等交通問題。 交通部於民國 99 年至 102 年,辦理《交通技術研發與人才培育規劃研究》四年期計畫, 其核心研究工作共包含兩個部分,一為發展本土化的車流模擬軟體,另一為發展適用於國內 的號誌時制最佳化軟體。另舉辦交通專業的技術人才培訓,整體目標即透過前述兩項核心研 究,促使我國交通建設的績效能夠不斷地提升,並以提升公路交通技術研發品質與能量,藉 以增進交通設施服務功能與服務水準,達成交通建設永續發展,增進國家經濟發展為目標。 其中,車流模擬軟體的發展重點是建立適合國內交通環境的模擬軟體和微觀車流模式,有關 微觀車流模擬的探討,該計畫已利用實測所蒐集之資料,建立混合車流之跟車模式及變換車 道之關係,包括:小型車與小型車、小型車與大型車、大型車與大型車、以及機車與其他車 流間互動之關係。同時,透過上述不同車種間互動方式之模式的適當參數,來反應不同類型 的駕駛行為。由此可知,該計畫已針對混合車流的行為分析與模擬,達到階段性的成果。 為加強機車為主題的行為研究,交通部於民國 103 年辦理《機車行為模式在都市混合車 流中之實証分析及模式建立》計畫,該計畫之核心工作主要係針對以機車為本車的微觀車流 進行分析,探討機車受周邊環境影響下的巨觀及微觀車流特性,並探討了機車於路段中以及 路口的行為,包括如推進、變換車道、超車、滲入、啟動等各種更為細緻的分析;同時,亦 將機車的駕駛行為特性納入考量。為延續上述的前期研究,應進一步考慮不同的路段及路口 情景以及車流組合的情況下,分析機車的行為特性並建立行為模式,並建構於車流模擬軟體 內進行驗證,如圖 1.1 所示。1.2 研究目的及範圍
為了達到交通部發展適用於國內的車流模擬軟體之目標,需先針對國內車流特性進行各 項研究。除了需要完成巨觀與微觀的機車車流特性外,也需要針對各種情境下機車之反應行 為進行研究。而最後則是可將所有與機車車流相關之模式建入車流模擬軟體中,以供各縣市的行為之階段性任務。而本研究旨在透過我國實際車流資料的蒐集與分析,解析我國市區道 路混合車流中,以下幾種機車與其他車輛互動情況下之機車行為或車流特性,以供進一步發 展適用我國車流狀況之交通管理方法,如圖 1.1 所示:
(一)
機車於路段中橫向移動的行為模式1.
機車的車道選擇行為;2.
機車在車道中的橫向位置選擇行為。(二)
機車於路段中對公車靠站與路邊停等車輛之反應行為模式1.
機車對公車靠站及離站之反應行為;2.
機車對路側停等車輛之反應行為。(三)
機車於路口停等位置選擇行為與疏解率1.
機車轉向的方向與路口停等位置選擇之關係;2.
路口疏解時間。 微觀車流模擬軟體之實際應用 機車在都市混合車流中之行為 本土化車流特性調 查與車流模式建構 車流模擬軟體開發 混合車流特性 · 巨觀 · 微觀 微觀混合車流 資料蒐集 (一般路段) 機車駕駛行為 · 縱向推進 · 橫向移動 機車車道規範 外側車道干擾 混合車流 路口紓解 機車群體互動 其他車輛受機 車影響之行為 無號誌交叉口 其他路型之 機車行為 微觀混合 車流模擬 軟體 微觀混合車流 資料蒐集 (不同情境) 微觀混合車流 資料蒐集 (不同地區) 模擬平台 上線及介 面改進 分析不同地區的車 流行為特性差異 模式校估及參數建 議值範圍 安全分析 其他應用... 道路績效評估 交通技術研發與人 才培育規劃研究 (民99~102) 機車行為模式在都 市混合車流中之實 証分析及模式建立 (民103) 本期計畫 (民104) 後續研究建議 微觀混合車流 資料蒐集 (不同情境) 其他情境...1.3 工作內容與研究方法
本研究的方法如下,流程圖如圖 1.2 所示。 1. 研究問題與範圍定義:依照本研究之研究目的,定義研究之問題與範圍。 2. 文獻回顧:依照本研究之研究問題與範圍,進行文獻回顧。 3. 資料收集:收集機車於混合車流的行為數據,以攝影機拍攝並利用電腦程式以半手動的 方式轉換成車輛軌跡資料庫。 4. 實證分析:定義各模式中,機車於路口及路段行為相關之變數及計算規則,並利用統計 方式找出關鍵變數對不同機車行為之影響。 5. 行為模式發展:針對機車橫向位置選擇行為、機車對公車靠站與路邊停車之反應行為、 以及機車於路口停等位置選擇行為與疏解率,產生一系列的數學或統計模式,描述機車 在不同情景混合車流內的選擇或反應情況。 6. 模式模擬及驗證:建構已發展的機車行為模式於機車模擬軟體內,測試行為模式的合理 性。 7. 期刊或研討會論文投稿:把研究成果撰寫成論文並投稿至國際研討會或國際期刊。資料蒐集 · 路口資料 · 路段資料 實證分析及歸類 · 機車於路段之行為 · 機車於路口之行為 行為模式發展 · 機車於路段中橫向移動的行為模式 · 機車於路段中對公車靠站與路邊停等車輛 之反應行為模式 · 機車於路口停等位置選擇行為與紓解率 模擬驗證 · 路口情境模擬與分析 · 路段情境模擬與分析 研究問題與範圍定義 文獻回顧 微觀車流模擬軟體開發 · 建入行為模式 · 車流參數調整 · 輸入及輸出介面改進 圖 1.2 研究流程圖
1.4 預期成果
本研究的預期成果如下: 1. 產出一份研究報告,詳細說明計畫中各項工作項目之應用資料及驗證結果。 2. 產出我國機車行為特性種類,並完成下列機車行為特性分析:機車於路段中之橫向位 置選擇行為;機車對公車靠站與路側停等車輛之反應行為;機車路口停等位置選擇與 疏解行為。第二章 文獻回顧
由於本研究於期中階段已進行“機車對公車靠離站之反應行為模式”與“路口疏解時間推 估模式”之建立,因此本章暫將針對與此兩模式相關之文獻進行回顧,包括:機車跟車與變換 車道行為、實體設施對混合車流之影響以及路口疏解時間推估等三大部分。2.1 機車跟車與變換車道行為
過去的學術研究,尚未能完整的描述一些機車的實際行為。車輛在移動當中的互動複雜, 過 去 的 研 究 主 要 針 對 小 汽 車 的 駕 駛 行 為 做 分 析 (Toledo, 2007) , 分 別 有 加 減 速 模 式 (car-following model, 跟車模式)、變換車道模式 (lane changing model)、及接受區間模式 (gap acceptance model) 來分析駕駛者的操控方式 (Gipps, 1981; Gipps, 1986),並把行駛規則建構於 微觀車流模擬模型。這個模型架構假設以上三個決策是連續(sequential)的,但機車在行駛時 不全然受限於車道規範(lane discipline),這些決策可能是同時(simultaneous)發生的,其行駛路 線可視為一變動的虛擬車道(Lee, Polak and Bell, 2009),其可在同一車道內與其他車輛併行, 也能在同一車道內超車;另外,機車能斜向跟車,能夠維持較小的跟車間距,而且其跟車間 距會隨著與前車的相對位置而異(Lee, Polak, Bell and Wigan, 2012);在車流中,機車會展現出 穿梭、蛇行及橫向閃避之行為,塞車時也會行駛至停等車隊的前方。 有研究亦利用類神經與模糊理論來建立跟車模式。藍武王(1994)以 GM 模型為基礎,設 計模糊控制系統用以模擬駕駛人之行為,其所觀察變數與 GM 相同,但採用 Pipe 模式中之安 全距離定義,在觀察變數中之前後相對距離納入最佳距離之概念;張維翰(2006)一利用適應 性類神經模糊理論系統建構混合車流於郊區路段的跟車模式,而車道變換模式則是分為變換 車道的行為準則與偏向角模式兩種。車道變換模式依據本車為汽車和機車分為兩種不同的情 況:如果本車為汽車的話,考量前車為機車的情形,並且將目標車道分為沒有車輛、有前車、 有後車、有前車和後車四種不同的情境。其主要的考慮變數為偏向角,另外也考慮了本車速 度、本車與鄰車的距離差與速度差、還有前方機車距右側車道緣等不同的變數。本車為機車 另外考量了本車與前車的相對縱向距離與相對橫向距離,以變換行向代表機車變換車道之行 為。 另外國內也對於機車變換車道之行為做了一些研究。早期的文獻利用動態車長、車寬與 安全間距的概念,建立各車種的加減速、變換車道等的推進原則,陳志偉(1987)以動態車長 及動態車寬之觀念計算各種車輛佔用道路面積,再輔以道路寬度限制、前車限制、直進限制 以及前進路線之選擇邏輯,模擬混合車流在圓環系統中推進之行為;李樑堅(1992)以動態安 全間距反推動態加減速率、汽機車不同車種之變換車道準則、機汽車混流推進理念、變動進 退兩難區、「一般化固定軌跡、固定衝突點模式」作為車輛於路段、路口及黃燈行為之處理模 式;何佳娟(2001)以新竹市光復路(建功路口至金城一路口)路段進行微觀汽機車混合車流研究, 分別考量路段車流行為與鄰近路段車流行為。而路段車流行為主要研究變換車道行為,駕駛當與前車的偏向角大於與目標車道前車的偏向角時才可以成立條件,並且將前車車種的觀念 導入。與期望車道前後車關係的主要考量為大於動態安全間距時,變換車道的條件才會成立, 將變換車道行為以流程圖表示判斷。提出機車的鄰近車道為機車本身之靜態車寬加上動態側 向間距觀念。此研究選擇的光復路樓房較矮,攝影拍攝範圍僅能到達 12 公尺,難以掌握路段 中機車的連續移動過程。上述文獻雖然有對各種情境下機車駕駛行為提出一些探討,但由於 使用方法不一,因此較無法融合為一適合各種情境之車流模式。 利用上述的研究方法進行機車研究外,張正達(2012)研究機車在低速情況下的運動推進 模式,將研究範圍限制於鄰近路口與紅燈號誌,研究機車在停止車陣中的低速鑽隙行為。研 究中將機車的前方與左右方劃分為 14 個不同大小的格子,機車駕駛有三種方向選擇:左前方、 前方、右前方。將 14 個格子的變數輸入,將數據資料格子化判斷機車駕駛在緩慢移動時的方 向選擇,並將心理因素的領地效應加入變數中,建構機車推進距離的準則。但是此研究並不 適用於路段中高速行駛的機車駕駛,且必須將影像畫面劃分為格子才可進行。許添本、韓復 華(2011)進行交通技術研發與人才培育規劃研究(2/4),針對國內混合車流進行完整的研究。其 中包含跟車模式、錯車模式、強制型變換車道模式、接受間距模式四項主要車流模式的初步 建構。原始資料收集的方式是利用高樓影像拍攝,將影片畫面依照每 0.5 秒一張(frame)的方 式收集車輛座標,並以人工分組的方式將本車與鄰車的關係分為許多不同的分組類型進行研 究。許家齊(2012)研究中發現兩車的側向偏移量對於機車的縱向跟車有很大的影響,側向偏 移量越大會造成縱向間距越小,並且首度引入馬可夫模式於混合車流環境中,結合行為門檻 模式之感知分界,駕駛人在不同的感知狀態可用不同之加減速模式做推進。李健豪(2012)利 用多項羅吉特模式進行超車行為路徑選擇決策模式,分別以汽車為本車和以機車為本車校估 參數。小汽車為本車考量的主要變數有距離差和車速差。機車為本車則加入了錯車距離、前 一秒側向偏移量等新變數,而機車的選擇共有五種:跟車、向左錯車、向右錯車、向左偏移 跟車、向右偏移跟車,最後利用判中率來檢視結果。 另外,一般車流模擬模式假設車輛進入車道時,汽車皆會行駛於車道線的正中間,符合 車道規範(lane-based traffic),然而機車由於其體積小,可穿梭於車輛之間,亦可任意變換車道, 因此又稱機車不受車道規範(non-lane-based traffic)。由於機車不受到車道規範的限制,其行為 違反諸多跟車模式的基本假設,因此學者們開始發展無車道規範的情況下之跟車模式, Gunay(2007)提出在無車道規範的限制下,當前車減速或停止時,候車可選擇橫向偏移至車道 間的空位或超越前車,以預防追撞事故,因此其跟車模式增加考量相鄰車道的車間摩擦間隙 (Frictional clearance),以及車輛有足夠時間可變換車道以避免追撞的最大逃避速度(Maximum escape speed)。Jin (2011)提出在無車道規範下的跟車理論應考量前車與後車的橫向間距特性, 因此改良傳統 TTC(Time to collision)的方法,將可視角度 (Visual angle)考量至 TTC 中,並引 入至 GM model 中,發展混合車流下的車輛錯車模式(Staggered car-following theory),此模式 可描述車輛的橫向移動以及鄰近車輛的影響,提升模擬車輛跟車行為的準確度。Nguyen (2012)
有車道規範的車流低。 過去研究多以小汽車的車流理論為基礎來研究機車,但這無法回應汽機車在混合車流情 況下的一些議題。因此分析小汽車的模型架構並不完全適用於分析機車行為。而《機車行為 模式在都市混合車流中之實証分析及模式建立》針對機車為主體於都市混合車流中的行為進 行分析。混合車流中的行為情景可分為路段及路口,並探討推進、變換車道、超車、路口滲 入、起動等議題。該研究針對國內常見的主要幹道類型,於台北市選取了三個調查地點(150 公尺以上的單向四線道含路口,如附件 B),各進行 2 小時以上的資料收集。記錄到的軌跡資 料庫包含車輛數共 23286 輛,產生 972,168 筆資料,涵蓋車流密度高中低的情景。並進行實 證分析及行為模式的發展,在路段方面,建立了推進、變換車道、超車頻率的行為分析,以 及在各個行車道上的差異。發現機車有不同程度的激進程度(侵略性),與因子如橫向偏移、 變換車道次數、有否使用內側車道、最大速度等有關。在路口方面,建立了路口滲入及停等 跟疏解的行為分析。最後,該研究通過以 Java 建立的模擬平台,進行模式的驗證及參數的敏 感度分析。
2.2 實體設施對混合車流之影響
本研究所述之市區道路實體設施是指公車站牌、計程車招呼站等,這些設施通常有公車 與計程車的停靠與進出,勢必影響路段上混合車流的駕駛行為,尤其以機車受干擾最為嚴重。 公車體積龐大,當公車於路邊停靠站牌時,會使得機車騎士被迫以鑽車或超車的方式變換車 道;而計程車則是有較急遽的橫向偏移,對於最外側車道的小汽車、機車以及較為激進的計 程車駕駛而言,都容易發生事故。 異質性混合車流下,過去研究較少有綜合性的分析結果協助公車站的設計與規劃。Koshy and Arasan (2005)曾探討公車站對於混合車流的影響,在印度清奈市區四車道的路段進行錄影、 蒐集資料,利用 C++程式語言建立模擬市區道路公車站影響異質性車流的模式。研究指出公 車進出站會減少可用路寬,一旦壅塞時將產生路段瓶頸,以及影響路段車輛的駕駛行為。同 時也比較路邊停靠(Curbside)、公車彎(Bus bay)的設置方式對於路段車流特性的影響,無論何 種設站方式,每一小時有兩千台車輛通過時,公車的停靠時間多寡並不影響道路上車輛的平 均速率;當道路上車流量較大,一小時有超過三千台車輛通過時,公車路邊靠站時間愈長, 路段上平均速率下降愈劇烈,相對而言,若設置公車彎的方式則較不受影響。 Zhao et al. (2009)研究公車站附近機動車輛與非機動車輛的混合車流狀況,並考慮無車道 規範下的車輛行為。調查道路系統中的車流量與公車容量,將環境影響變數如公車停靠時間、 加減速度值納入考慮範圍,分別繪製機動車與非機動車之相關交通時空圖,觀察其特性並提 供市區混合車流下公車站管理與設計之參考。 文獻指出公車站設置方式、設置位置、公車進出站的行為等,對混合車流的交通形態有 相當大的影響力,尤其機慢車輛經常受其影響,但尚未考慮到機車於混合車流下受公車影響2.3 車輛疏解特性
路口車輛的疏解行為指的是綠燈開始時,車輛從路口離開的過程。一般來說,一個路口 的疏解能力可藉由單位綠燈時間內能疏解的車輛數來衡量,稱疏解率,而疏解率會隨著時間 在綠燈開始後一段時間達到一穩定值,稱飽和流率。在綠燈開始時,車輛會緩慢加速而有一 段時間的疏解率皆小於飽和流率,此段時間稱啟動損失時間,其與燈號轉換時之損失時間和 稱為損失時間。每週期車輛所能使用之有效綠燈時間即為綠燈秒數扣除掉損失時間,而 Webster (1958)以圖 2.1 說明有效綠燈、飽和流率與損失時間之關係。 資料來源:臺灣地區公路容量手冊(2011) 圖 2.1 飽和疏解率圖 機車在路口疏解時可分為在混合車道以及機車專用道兩部分來看,在市區號誌化路口中 之混合車道內大多設置有機車停等區。機車停等區的設置可讓機車在紅燈期間至最前方停等, 使得汽機車混合停等的情況減少。如此一來,後方的汽車較不會受到機車的干擾,能有較高 的飽和流率。 在不同車種間適用的車流疏解分析會有所不同方式,以往對於汽車的研究多使用間距法 去分析,而對於機車專用道的機車大多使用固定時段法。另外還有三時段調查法與占用道路 面積比例法(鄭鼎煜,2005)。若要以混合車流或是機車來分析,只能使用固定時段法和三時 段調查法。原因為機車並無確切之車道規範,且其體積較小,車間距較不易判定。微觀分析 使用的間距法基本上用於單一車道的調查上,再者,本研究採取的資料蒐集及整理方式對於 車間距的判定較不適合。然而,固定時段法僅需計算單位時間內通過的車輛數,在使用程式 判定方面彈性較大。 不同的車流形態與路口的車輛疏解有很大的關係,本研究觀察的路口為包含汽機車之混 合車流,其疏解形態會因為汽機車間的相互影響而介於純機車車流及純汽車車流之間。影響2.3.1 汽車疏解 相對於機車因體積小,無明顯車道規範,汽車則會受到車道規範而在路口會依序停等。 所以汽車在疏解時,會與前後之汽車有所謂的疏解間距。停等車隊的疏解間距會隨時間達到 一穩定間距,稱飽和間距。臺灣地區公路容量手冊(2001)指出,在第 4 部、第 5 部車輛後, 會趨向穩定而達飽和間距。 資料來源:臺灣地區公路容量手冊(2001) 圖 2.2 飽和流率和飽和間距示意圖 鄭鼎煜(2005)針對禁行機車之直行車道上的汽車,以大型車與小型車不同的跟車組合型 態來探討疏解情形,建構車輛疏解時間預測模式。許銘娟(2006)則多考慮有無設置停等區、 不同基準線位置比較和第一部車搶先啟動之行為等等變因對於直行汽車的影響。吳政諺(2006) 則針對左轉汽車進行探討,分成單左轉和雙左轉專用道。 2.3.2 機車專用道之機車疏解 機車若與汽車行駛在同一車道上,很容易造成危險衝突,因此交通主管機關在某些路段 上設置機車專用道路或車道,以分隔汽、機車。機車專用道兩端通常有號誌化路口,又因為 車道不長,所以專用道上之車流一般為阻斷性車流(臺灣地區公路容量手冊,2011)。在機車專 用道中,機車不會和其他車種一同停等,交通部運輸研究所(1999)則對機車專用道之機車疏 解特性進行調查。以固定時段法每兩秒紀錄一次通過路口停止線的機車數,繪製出疏解機車 數與綠燈時間之關係圖(如圖 2.3),其証實純機車車流具有飽和流率的存在,且在綠燈亮後 8 至 12 秒左右達到一穩定之疏解率。
資料來源:交通部運輸研究所(1999) 圖 2.3 機車專用道平均疏解率圖 而湯儒彥(1999) 分析純機車車流之疏解型態,研究最後確立純機車車流具有飽合流量之 特性,並推估出在 3.0 公尺寬之機車道,飽和流量為 7,596 輛/小時˙3.0m。蔣靜宜(2003)探討 機車專用道車輛的疏解情形與推估飽和流率,並討論 VISSIM 微觀模擬軟體應於於台灣機車 專用道的可行性。張瓊文、林豐博、曾平毅(2009)探討機車專用道中之車隊擴散現象,分析 車隊在各定點之間疏解時間的差異以分析行車距離與機車車隊擴散程度的關係及流率的變化。 在機車專用道的疏解相關研究中,大多以車道寬為一主要的影響因素去考慮,臺灣公路容量 手冊(2011)則對於以往用車道寬度在機車專用道推估出的飽和流量有著不同的見解,其認為過 去模式估計值的差異來自於車道寬的定義不同,以及沒有考慮到車道寬的使用受到兩側標線 或者分隔物的影響。因此,依照機車專用道左右側之分隔型式建立了一公式,根據不同分隔 型式而有不同的調整因素值,以估計可用之路寬。 2.3.3 混合車流之車輛疏解 若機車騎乘在與汽車混流的道路上,兩者之間會相互干擾,這種情形在沒有繪製機車停 等區的路口上,汽機車混雜的情形更加明顯,而在路口有設置機車停等區內時,機車會在紅 燈期間行駛至最前方之機車停等區停等以降低混合比例,但同時也可能出現機車在汽車側邊 停等的情形而造成摩擦。劉力銘(2004)對機車車隊之疏解特性進行分析,比較停在停等區內 之機車與停等在汽車車混合車道之機車的疏解特性,並分別建構混合車流中機車疏解率模式。 張家峰(2004)探討號誌化路口機車車隊等候長度對混合車道容量的影響,其等候長度以縱向 等候列數為長度單位,但在同一長度下停等車輛數可能會因停等空間利用率而有所不同,所 以也探討在不同停等空間利用率下,相同等候長度之車隊與疏解時間的關係。除了機車停等 區外,張瓊文、林豐博、曾平毅(2008)亦將機車兩段式左轉待轉區納入分析,探討其與機車 停等區、機車停等區上游車道之停等車疏解特性,並分別建立分析模式。
道的號誌化路口進行錄影調查,拍攝一小時的影片,挑選當中 6 個週期來分析,以每 0.5 秒 一次去擷取螢幕上之座標得到車輛的位置與速度等資訊。以此資料量化上述行為之後並建構 模型,最後,藉由撰寫模擬程式,以視覺化的方式進行模擬和模型的驗證。 在過去幾篇關於混合車流的相關文獻中,分別探討了機車疏解的影響因素。包括停等區 之長寬、停等區之機車密度、在汽車前方之機車的縱向等候列數(等候長度) 、提前啟動機車 數、佔用停等區之汽車數、停等區機車疏解完之剩餘綠燈時間、機車混合比、右轉汽車比例、 行駛各車道之汽車百分比、行駛路肩之汽車百分比、直行/右轉之大/小型車比例、與大/小型 車併行之直行/右轉機車比例、車道寬…等影響因素。但要將這些文獻之模式應用在微觀模擬 上,有其困難,因為以微觀來看,各車種在停等時的排列順序會與疏解率有關。停等時的排 列型式越複雜,則會增加汽機車之間的交互影響,導致疏解的降低。
2.4 小結
本章針對國內外機車變換車道行為、實體設施對混合車流之影響與汽機車疏解時間的相 關文獻做一回顧,綜合上述可知: 1. 許多文獻皆是以小汽車的車流理論為基礎來研究機車,但這無法回應在汽機車的混 合車流情況下的一些議題。因此分析小汽車的模型架構並不完全適用於分析機車行 為。 2. 《機車行為模式在都市混合車流中之實証分析及模式建立》計畫雖然已進行了機車 駕駛行為特性的基礎研究,但機車行為在不同情境下或有差異,仍需要針對一些情 境,分析該情境下之機車行為,例如:公車進出站對機車之影響、在不同幾何型態 下,機車對於橫向位置選擇的差異等。 3. 傳統跟車、變換車道模式均以同車道前方車輛做為前車,而機車駕駛並不具有車道 規範,因此若要發展國內模型,需謹慎定義周邊影響範圍。 4. 早期關於車流疏解的文獻多著重於求取單一車種時之飽和流率的數值,爾後則開始 探討影響飽和流率的相關因素。近期則有文獻開始探討混合車流之流率,但受限於 資料蒐集的方式,因此無法蒐集到汽機車停等時排列順序的資料,造成較無文獻探 討汽機車排列順序對於疏解時間之影響,但停等時的排列型式越複雜,則會增加汽 機車之間的交互影響,導致疏解的降低。隨著資料蒐集的方式及型態的發展,或許 能將其量化來做探討。 5. 過去的車流行為研究大多以錄影方式進行資料收集,由路邊制高點拍攝路口或路段 的情況,優點為可於事後再針對拍攝影像進行資料蒐集,若資料有誤,則可追溯。 但缺點為可視範圍較小,由影像轉換成資料時,需要事前定義資料參數。應發展更 全面的資料蒐集方式,以期達到更完整的呈現實際車流情況。第三章 研究架構
為達成本研究之目的,本研究提出之研究架構如圖 3.1 所示。本章將就研究問題定義與 實證分析及歸類之架構進行說明。資料蒐集將於第四章作詳細描述,模式建立與各模式之實 證分析將於第五章討論,模擬及驗證則於第六章詳述。 實證分析及歸類 本車狀態與環境變數 微觀變數 · 本車狀態變數 · 周邊車輛對本車 干擾因素 · 前方號誌影響 巨觀變數 · 車流量 · 車流密度 · 車流速度 控制變數 · 路段幾何型態 · 路口幾何型態 · 法規限制 駕駛者潛在變數 · 前方路口轉向決定(可觀察) · 駕駛侵略程度(不可觀察) 找出各機車行為模式適合之影響變數 研究議題 (一) 機車橫向移動行為 (二) 機車對公車靠站與路邊停車之反應行為 (三) 機車於路口停等位置選擇行為與紓解率 資料蒐集 · 路口(兩段式、非兩段式左轉) · 路段(兩車道、三車道、四車道) 模式建構 (一) 機車於路段中橫向移動的行為模式 1.機車的車道選擇行為 2.機車在車道中的橫向位置選擇行為 (二) 機車於路段中對公車靠站與路邊停等車輛之反應行為模式 1.機車對公車靠站及離站之反應行為 2.機車對路側停等車輛之反應行為 (三) 機車於路口停等位置選擇行為與紓解率 1.機車轉向的方向與路口停等位置選擇之關係 2.路口紓解時間 模擬與驗證3.1 研究議題描述
本研究之目的為分析所蒐集之數據,了解並歸納出機車車流行為之形態,並探討機車於 路段中橫向移動的行為模式、機車於路段中對公車靠站與路側停等車輛之反應行為模式、機 車於路口停等位置選擇行為與疏解率等三大議題: (一)機車於路段中橫向移動的行為模式 車道規範(lane discipline)指車輛橫向移動時的行為特性。小汽車行駛時不應任意變換車道 或蛇行,在不是超車的情況下,應當行駛在行車道內,而慢車亦應當選擇使用慢車道,這是 小汽車駕駛者應當遵守的車道規範原則。機車並不需要全然遵守小汽車的車道規範,因此學 術文獻當中都把機車敘述為沒有車道規範(no lane discipline)。過去研究使用車道變換(lane changing)模式去建構車輛在路段當中橫向移動的行為,以離 散選擇模式(discrete choice model) 描述在車輛的不同周邊情景變數下,選擇是否變換車道或 變換至左側或右側車道的決策行為。相對之下,機車寬度較小,行駛路徑也不受車道標線所 規範,因此目前使用車道變換模式的微觀車流模擬器,無法完全反映機車橫向移動的整體結 果。 圖 3.2 是利用實際收集的微觀車流資料,計算出小型車及機車車輛通過路段中不同地點 時,車頭橫向位置的分佈次數,以及在路段中不同縱向位置(x=30m、60m、90m、120m)的變 化。圖中 x 軸為車輛通過路段縱向位置時,車頭橫向位置的分布。由於本計畫為延續交通部 於民國 103 年辦理《機車行為模式在都市混合車流中之實証分析及模式建立》計畫,因此為 統一軌跡檔之座標格式,在縱向位置部分,本研究以最外側路緣為起點,而台灣地區為右駕, 因此特將圖 3.2 與圖 3.3 之 0m 放置於最右側,而 x 軸的 3.4m、6.4m、9.4m 處標示虛線,表 示車道線。0~3.4m 為第四車道 (最外側車道),3.4~6.4m 為第三車道,6.4~9.4m 為第二車道, 9.4~12.7m 為第一車道(最內側車道)。即車頭若位於 0~3.4m,則該車輛位於第四車道(最外側 車道),若位於 3.4~6.4m,則位於第二車道,以此類推。圖中可看出,小型車遵守車道規範, 車頭分佈集中於車道的中央,而且車輛使用快車道(左側行車道)比較多、慢車道(右側行 車道)比較少,與預期相符。而機車的車頭分佈與小型車不同,並沒有集中於車道的中間。
圖 3.2 車輛通過路段時的車頭橫向位置分佈 圖 3.3 是利用微觀車流模擬器產生所產生的車流結果,再計算出車頭的橫向位置分佈。 圖中顯示機車集中行駛於車道的標線上,原因是小型車集中在車道中央,機車會利用臨近車 道間小型車的空隙進行鑽車或超車,分佈與實際資料所觀察的現象顯著不相同。而在現實中, 機車在標線上行駛會因為油漆表面的摩擦力較低而有打滑的現象,機車會自動避開。 圖 3.3 利用微觀車流模擬器(VISSIM)產生的車頭橫向位置分佈
機車
小型車
Lateral location (m)9.4 6.4 3.4 0 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 PTW @30m Lateral location (m) 0 3.4 6.4 9.4 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 20 25 30 35 40 Car @30m Lateral location (m)9.4 6.4 3.4 0 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 PTW @60m Lateral location (m) 0 3.4 6.4 9.4 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 20 25 30 35 40 Car @60m Lateral location (m)9.4 6.4 3.4 0 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 PTW @90m Lateral location (m) 0 3.4 6.4 9.4 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 20 25 30 35 40 Car @90m Lateral location (m)9.4 6.4 3.4 0 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 PTW @120m Lateral location (m) 0 3.4 6.4 9.4 12.7 F re q u e n c y o f v e h ic le s 0 5 10 15 20 25 30 35 40 Car @120mLane 1 (innermost lane) Lane 2 Lane 3 Lane 4 Traffic direction → Bus Stop
左至右:車輛通過路段縱向位置 x=30m、60m、90m、120m
0 3.4 6.4 9.4 12.7 0 10 20 30 40 50 PTW @30m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.70 10 20 30 40 50 PTW @60m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.7 0 10 20 30 40 50 PTW @90m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.70 10 20 30 40 50 PTW @120m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.7 0 20 40 60 80 100 Car @30m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.70 20 40 60 80 100 Car @60m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.7 0 20 40 60 80 100 Car @90m Lateral position (m) F re q u e n c y o f v e h ic le s 0 3.4 6.4 9.4 12.70 20 40 60 80 100 Car @120m Lateral position (m) F re q u e n c y o f v e h ic le s擇有明顯的不同,在車流密度中低的情況下,機車會偏好慢車道旁邊的車道;而在車流密度 高的情況下,有較多的機車會使用慢車道。 (a)車流密度低 (b)車流密度中 (c)車流密度高 圖 3.4 不同車流密度下的車頭橫向位置分佈 綜合以上討論,本研究欲探討的問題如下: 1. 機車的車道選擇行為; 2. 機車在車道中的橫向位置選擇行為。 以上模式的建立需考慮混合車流中會遇到的情景,如不同車輛密度、汽機車的比例、大 型車或公車等對機車的影響。 (二)機車於路段中對公車靠站與路側停等車輛之反應行為模式 國內市區道路混合車流之車種包含機車、小汽車、公車等,機車於路段上的駕駛行為除 了受到周遭其它行進間的車輛、整體車流密度等影響之外,行駛路段旁若有停車格、公車站 牌、計程車招呼站等實體設施與標線時,這些設施常有公車與計程車等的停靠與進出。臨停 車、其他車輛的進出站勢必影響機車的駕駛,且機車體積小、機動性高,轉向與移動行為較 靈巧,因此本研究欲了解機車受到公車進出站與路側停等車輛之干擾後的反應行為。如圖 3.5 所示,當前方公車欲靠站時,後方的機車將會如何反應,是本計畫重要的研究議題。 圖 3.5 公車靠站示意圖 公車體積龐大且機動性低、平均車速較汽機車緩慢,加減速度的特性也不如機車靈巧。 黃俊評(2013)以國內市區幹道為研究對象,分析混合車流下以公車為本車的駕駛行為,構建 (a) 車流密度低 (b)車流密度中 (c)車流密度高 機車 公車停靠區 站 公車 公車
針對車流巨觀變數的變化做為討論基礎,例如公車停靠時間的多寡並不影響道路上車輛的平 均速度,但此研究並無直接探討機車受影響後的微觀行為。而當公車進站、離站時,若以較 大的角度彎入彎出,甚至是以緩慢的速度行駛在最外側車道欲停靠時,勢必影響路段上混合 車流的駕駛行為,尤其以機車受干擾最為嚴重。當公車欲於路邊停靠站牌或是其它路側停等 車輛欲駛出時,使得機車騎士被迫以鑽車、超車等較為激進的方式變換車道或是被迫降低速 度跟車在其後。一般來說遇到此類情境,機車駕駛會視其位置、速度、加速度、後方車輛等 等的影響,切至內側車道從其左方快速超越、或漸漸減速尾隨於其後、或繞至其右方並緩速 通過。公車停靠、離站對於機車的影響勢必與小汽車有極大的差別,機車有可能為了閃避公 車必須產生大幅度的橫向偏移,或較大的減速度行為,一旦闖入視野死角範圍,容易發生交 通事故。 臨時停車或違停路邊的現象以市區幹道最為明顯,經常佔據外側車道,使得道路容量下 降,市區嚴重堵塞,原本駛於外側車道的機車為了避免撞上臨時停車之車輛,被迫左切或行 駛在較危險的快車道上,與小汽車爭道的駕駛行為具有高風險性,且對於路側車輛何時啟動 的不確定性,也讓機車駕駛產生行車疑慮。另一種路邊實體設施包含計程車招呼站,計程車 們會依序停成一排,當路邊有客人上車後再駛出,進入車道行駛,且國內計程車駕駛通常有 較佳的駕駛自信和技術,李易如(2013)指出計程車完成變換車道的動作所需秒數低於一般小 汽車。計程車的停靠與出站行為亦會對機車的駕駛有一定的影響,有的駕駛甚至會突然從內 側車道切換至外側車道,接客之後立即從外側車道切回內側車道。這些較為激進的計程車駕 駛行為,對於機車來說具有威脅性。 綜合以上討論,本研究欲探討的問題如下: 1. 機車對公車靠站及離站之反應行為 2. 機車對路側停等車輛之反應行為 過去研究皆有探討混合車流下公車的進出站行為、公車站影響混合車流的模式、小汽車 變換車道以及路邊停等行為,但尚無考慮這些現象對於機車會如何反應的微觀行為分析,因 此本調查計畫希望挑選台灣市區幹道為研究對象,了解機車對公車進站、離站與路側停等車 輛之反應,希望藉由模式能描述機車的駕駛行為,亦可延伸探討機車是否行駛至公車站附近 時較不願靠近等議題。 (三)機車於路口停等位置選擇與疏解行為 機車在紅燈期間於路口停等的位置及排列方式,會影響到綠燈初始時機車啟動之順序以 及其後汽車的啟動時間,進而影響到路口容量及效率。在紅燈期間及綠燈起始時機車在路口 的運動模式,與在路段中之運動有很大的差異,這些特性與汽車啟動時之行駛特性有極大的 不同,在傳統以車道規範為基礎的跟車模型及換道模型中皆未於模型中加以描述,故本研究
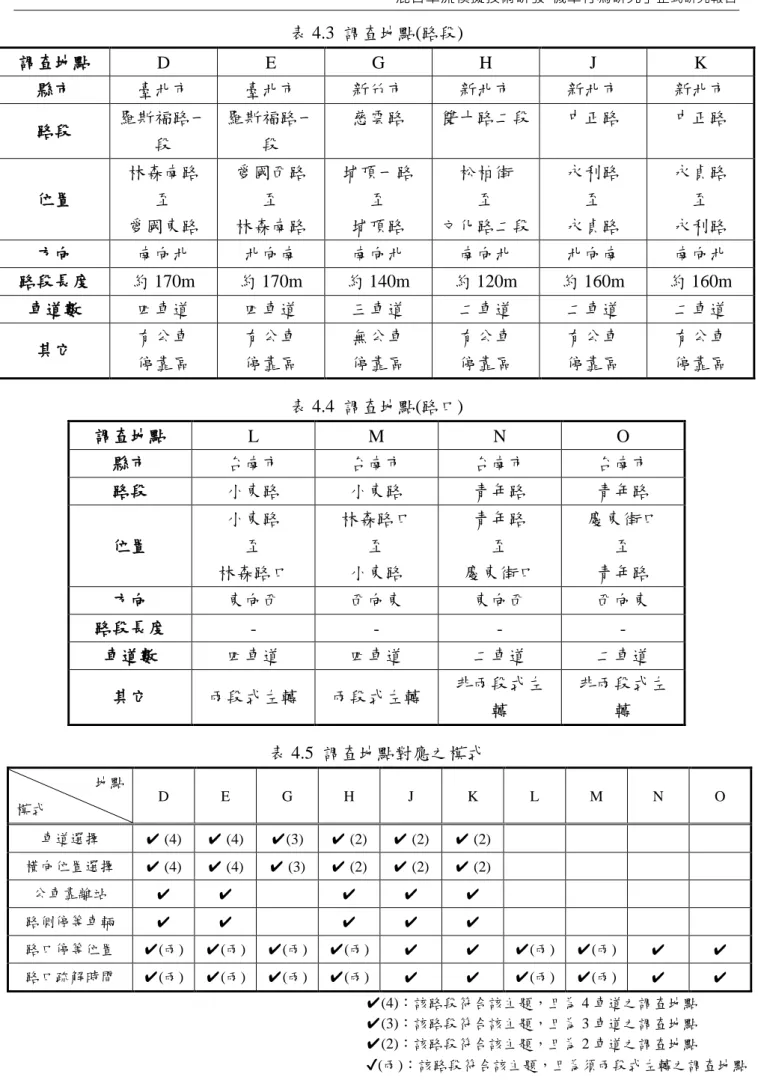
影響路口容量及效率的因素,可從微觀及巨觀兩個面向來探討,故本研究欲發展之路口行為 模式有二: 1. 微觀面向:機車轉向的方向與路口停等位置選擇之關係 2. 巨觀面向:路口疏解時間 1. 機車轉向的方向與路口停等位置選擇之關係 微觀面向可探討機車在路口停等位置的選擇,此會影響綠燈初始時之啟動順序及路口效 率,主要影響機車選擇停等區位之因素為與前面停止車隊之空間、前面停止車輛兩側之空間、 機車側向移動軌跡的延續性等物理及運動學上的變因,以及機車後續在路口轉向的方向等路 線選擇策略性的變因。這些變因中,又以後續在路口的轉向這種策略性變因影響較大,故本 研究擬收集實證資料分析機車轉向的方向與路口停等位置選擇之關係,再以數學模式來描述 此種關係。 由於目前機車停等區的設置,其大小及形狀並未考慮上述因素,且在微觀模擬系統中若未對 此處理,模擬結果可能會與現實有極大差異,影響系統的準確性,故有針對上述微觀面向分 析及模擬號誌路口機車停等行為之必要,本研究將選擇適當的統計及數學模型建構路口停等 模式。 圖 3.6 機車轉向的方向與路口停等位置選擇關係示意圖 2. 路口疏解時間 巨觀面向可探討混合車流組成與路口疏解率之關係,路口停等車輛中各車種的比例、車 輛在車道上的分布情形等,會影響路口效率疏解效率。此巨觀面向分析之目的,一在驗證微 觀面向模擬之準確性,一在提供資訊以擬定車流控制策略及設計路口路型及標線。本研究擬 收集實證資料分析上述變因與路口疏解率之關係,再以適當的數學模式來描述此種關係。
3.2 實證分析與歸類方式
(一)實證分析 本研究提出之實證分析流程,如圖 3.1 中實證分析與歸類中所示。其中行駛環境變數可 分為微觀變數(e.g.前車速度、與前車相對距離、與前車相對速度)及巨觀變數(e.g. 車流量、 車流密度),駕駛者會根據當時的情景及情況而選擇不同的行為策略,如在路段當中,機車會 有選擇車道的行為;當機車前方之公車欲靠站時,機車有會對其有超車或減速之行為;於停 等紅燈時,機車會選擇其停等位置等等。以上的變數,可以定出計算規則,從車流軌跡資料 庫中取得。 (二)變數定義 各研究變數地操作性的定義描述如下: 本車狀態及環境變數 本車狀態變數:包括 本車坐標位置 (x, y) 行車道(快車道、中線道、慢線道) 車頭角度[2] 速度 (m/s) 車輛種類 周邊車輛對本車干擾因素:定義周邊車輛為本車的鄰近 6 個方向,包括前車、左前車、 右前車、後車、左後車、右後車 (F/LF/RF/R/LR/RR) 周邊車輛車種,包括機車、小汽車、貨車、公車、無車 周邊車輛速度 (km/hr) 本車與周邊車輛相對速度 (km/hr) 本車與周邊車輛距離 (m) 本車前方是否存在車群 本車與前方車群相對速度 (km/hr) 前方、前方左側、前方右側可通過間距 (m) 左側車道、右側車道兩車間間距 (m) 前方號誌影響: 與前方路口停止線距離 (m) 前方號誌燈號 (R/A/G) 路口啟動紅燈倒數秒數 (s)控制變數 路段幾何型態 路段長度 (m) 行車道數 行車道寬度 (m) 路邊停車格位置及長度 公車站位置及長度 其他地面標線的坐標位置等 路口幾何型態 機車停等區 機車待轉區 左轉專用車道 其他地面標線的坐標位置等 法規限制 自由速率 (km/hr) 禁行機車道 駕駛者潛在變數 前方路口轉向決定:機車會因為要在前方路口轉向而在路段行駛中變換行車道,但這 個變數是在進行變換車道動作時無法觀察,但可由資料庫中讀取整個行駛軌跡來判讀, 因此定義為可觀察的潛在變數。設定為虛擬變數 [1/0/-1] 代表於前方路口左轉、直行、 右轉。 駕駛侵略程度:過去研究發現,車流當中的機車駕駛行為有極端的差異,具侵略性 (Aggressive) 的機車駕駛其速度較高、可接受區間等較低,比較保守(Conservative) 的 駕駛者則不願超車或由兩小汽車之間通過。小汽車的駕駛行為比較一致,而機車的駕 駛行為差異較大(Wong et al., 2013; Wong and Lee, 2015)。因此設定虛擬變數代表具侵略 性、一般性兩種機車駕駛者。 機車行為判定方式 車輛行為的判定是透過車輛連續 2 個或以上時階的位置、橫向偏移、及速度改變來計 算,研究項目中的機車橫向位置、對公車靠站的反應、路口停等位置選擇及疏解等行為, 可以拆解為以下數種基本行為(推進、超車、鑽車、變換車道、滲入、啟動)的綜合,計 算定義如下: 推進行為:推進行為可定義為縱向移動速度及加速度。 超車行為:超車行為是透過兩輛車輛隨著時間變化的相對位置來決定,若車輛 i 於 t 和 t+1 秒之間,處在車輛 j 的車道之橫向空間內,且車輛 j 超過了車輛 i,則車輛 j 將被視 為在時間點 t 對車輛 i 進行超車。
變換車道(橫向移動):機車並不行駛於車道(no lane discipline),因此使用橫向偏移代表 機車變換車道的意圖。本研究所謂之橫向偏移,係指於縱向前進的同時,有意識的改 變了橫向位置的行為。本研究透過分析機車的車流軌跡,改良了 Lee(2008)所採用的 方法,來對機車橫向偏移意圖進行識別。橫向偏移(變換車道)的意圖可定義如下:
機車於時間 t 和 t+1 秒之間橫向移動距離大於 0.5 公尺,其中 0.5 公尺乃是根 據機車的最小的側向安全距離來設定(參考 Minh et al., 2005; Minh et al., 2006; Hussain et al., 2005); 機車於時間 t 和 t+2 秒之間保持相同的側向移動方向,且橫向移動的距離大於 0.7 公尺,其中 0.7 公尺乃是以一輛機車的約略寬度來設定; 機車於時間 t 和 t+3 秒之間保持相同的側向移動方向,且橫向移動的距離大於 0.9 公尺,其中 0.9 公尺乃是以機車的虛擬車道寬度來設定(參考 Hussain et al., 2005); 機車於時間 t 和 t+3 秒之間保持相同的側向移動方向,且在第一秒和第二秒都 被判定為有意識的橫向偏移時,依其慣性,第二秒亦判定有橫向偏移之意圖。 圖 3.7 機車橫向偏移示意圖 滲入行為:路口的滲入行為可定義為根據前方停等車輛的排列及空隙大小,而選擇最 終的停等位置,變數為縱向移動速度及橫向偏移的改變,與推進行為及變換車道相同。 啟動行為:啟動行為是機車於路口停等時綠燈開始的行為,可分為 啟動延滯 Startup delay (s) 疏解間距 Discharge headway (s) 啟動加速度 (m/s2) 啟動推進速度 (m/s) (三)分析工作 實證分析的工作內容如下: 1. 對以上變數的資料進行敘述性描述分析; 2. 釐定各個影響機車行為的關鍵變數,並校估出代表影響效力的參數數值。 0.5 m 0.7 m 0.9 m
3.3.1 模擬驗證流程 本研究的模式模擬驗證流程如圖 3.8 所示。首先由驗證用資料庫擷取實際之車流量、車 種比例、轉向比等,接著把這些資料輸入 BikeSim 進行模擬,模擬之後 BikeSim 會輸出各項 驗證指標,包括路段旅行時間、車流平均速度、等候車隊長度與疏解時間。有了模擬車流的 軌跡檔後,即可依此計算出各項驗證指標的數值,將這些數值與實際車流之驗證指標數值相 比較,最後即可得出結果。 車流資料輸入 · 流量 · 車種比例 · 轉向比 微觀模擬 · BikeSim 模擬結果輸出 · 路段旅行時間 · 車流平均速度 · 等候車隊長度 · 紓解時間 比較驗證指標 驗證結果 驗證用 資料庫 驗證指標 · 路段旅行時間 · 車流平均速度 · 等候車隊長度 · 紓解時間 基本資料 · 幾何型態 · 號誌周期 圖 3.8 模式模擬驗證流程圖 3.3.2 驗證指標 本研究共有三大議題,各議題分別有兩個問題而各問題各有相對應之模式,因此共有六 個模式: 1. 機車的車道選擇行為模式 2. 機車在車道中的橫向位置選擇行為模式 3. 機車對公車靠站及離站之反應行為模式 4. 機車對路側停等車輛之反應行為模式 5. 機車轉向的方向與路口停等位置選擇之行為模式 6. 路口疏解時間推估模式
由於針對本問題所建立之模式的產出為機車之車道選擇行為,因此本研究 將比較實際資料與模擬結果之各車道的機車車流比例,以作為驗證此模式正確 性之指標。 2. 機車在車道中的橫向位置選擇行為模式 由於針對本問題所建立之模式的產出為機車在各車道的騎乘位置選擇行為, 因此本研究將比較實際資料與模擬結果之各車道的機車橫向位置分布,以作為 驗證此模式正確性之指標。 3. 機車對公車靠站及離站之反應行為模式 由於針對此問題所建立之模式的產出為機車在面對公車靠站及離站之反應 行為。當機車因應公車靠離站而做出反應時,本身速度會因為反應行為而有所 變化,因此會影響到本身通過影響區域的旅行時間。本研究將以機車通過影響 區域的旅行時間作為指標,驗證模式之正確性。 4. 機車對路側停等車輛之反應行為模式 針對路側停等車輛的反應行為模式為當機車面臨前方路側停等車輛時之反 應,而由於此反應行為會影響其他車輛,因此造成路段旅行時間與平均速度的 降低。本研究將以機車通過有路側停等車輛的路段旅行時間作為指標,驗證模 式的正確性。 5. 機車轉向的方向與路口停等位置選擇之行為模式 當機車因為轉向方向而影響其等候位置選擇時,會影響到整體車流的疏解 時間,例如:當右轉機車比例較高時,且右轉機車都傾向靠右側停等時,會增 加機車停等車隊的長度,因此會增加疏解時間。因此本研究以不同轉向比時的 車流疏解時間作為本項模式的驗證指標。 6. 路口疏解時間推估模式 針對此問題建立之模式的輸出為路段的車隊疏解時間,因此本研究即以此 作為驗證之指標,比較實際與模擬之車流疏解時間之差異。 表 3.1 各問題之驗證指標對應表 議題 問題 驗證指標 機車於路段中之橫 向位置選擇行為 如何決定使用那個車道 路段各車道的機車車流比例 (綠燈、無公車進出站時段) 在車道中的橫向位置選擇行為 路段各車道的機車橫向位置分佈 (綠燈、無公車進出站時段) 機車對公車靠站與 路側停等車輛之反 對公車靠站之反應行為 通過公車停靠站影響區域的旅行時間 對於路側停等車輛之反應行為 通過路段之旅行時間
3.3.3 驗證工具
本研究係以協同主持人李子璋博士所開發的混合車流模擬軟體 BikeSim (Lee, Polak and Bell, 2008b; Lee, Polak and Bell, 2009)來做為測試模型的工具。BikeSim 為本團隊成員所開發, 具有該軟體之開發經驗,又可取得該軟體之原始碼,故以 BikeSim 之架構為基礎。 BikeSim 之 背景、原理及界面描述如下。
3.3.3.1 BikeSim 背景
目前大多數的車流模擬軟體內之車輛都依循著車道規範行駛(FHWA, 1996; Paramics Microsimulation, 2008; PTV, 2011),以跟車模型(car-following model)(Gipps, 1981; Leutzbach & Wiedemann, 1986) 來 規 範 車 輛 在 車 道 內 縱 向 的 移 動 , 以 變 換 車 道 模 型 (lane-changing model)(FHWA, 1996; Gipps, 1986)來規範車輛在車道間的橫向移動,這些設定無法表現出機車 在車道內穿梭及蛇行等駕駛行為,因此也無法有效的模擬機車為主的混合車流情況。故有必 要發展出一套系統,可以展現出機車併行、斜向跟車、穿梭及依虛擬車道行駛等特有行為, 用來模擬汽機車混合車流。
本研究以混合車流模擬軟體 BikeSim (Lee, Polak and Bell, 2008b; Lee, Polak and Bell, 2009) 為基礎,加入本研究所發展之模型,以及增加輸入調查資料和輸出驗證指標的使用者介面等, 用以驗證及展示本研究之成果。Bikesim 在經過改良之後,應可模擬具有臺灣都市交通特性之 汽機車混合車流。
3.3.3.2 BikeSim 原理
Bikesim 以個體自主式模擬(agent-based modelling) (O'Sullivan and Haklay, 2000)為模擬架 構,以 JAVA 程式語言編寫。個體自主式模擬的架構,乃是賦予模擬軟體中每一個個體有自 己的記憶、偵測環境的能力以及行動規則,依其與周遭環境的關係,根據行動規則決定其下 一個時間點的行動,此種模擬架構,符合 JAVA 語言物件導向的特性,而且適合用來模擬車 流行為。實際進行模擬時的介面,如下圖 3.9 所示。以下將針對 Bikesim 的特點做進一步的說 明。
圖 3.9 Bikesim 的車流模擬畫面
BikeSim 的基本假設為機車行駛於變動的虛擬車道(dynamic virtual lane)上,機車騎士的駕 駛行為取決於其與周遭汽機車的互動;而汽車則必需遵守車道規範(lane discipline)。由於機車 跟汽車相比,其重量體積、性能、操控、視野與反應時間等皆有明顯的不同,這些差異導致 機車有異於汽車的駕駛行為,諸如併行、斜向跟車、較小的跟車間距、穿梭及蛇行等(Lee, 2008), 這些差異反應在駕駛行為上,就是車道規範的差異。 Bikesim 主要以三個次模型來描述機車的駕駛行為在車道規範上的差異: 縱向跟車次模型主要在描述機車在跟車時與前車之相對位置會影響到其跟車距離, 當機車跟車時是對著前車的側邊邊緣時,其跟車距離會比較近;但若是對著前車的 中心線來跟車,則跟車距離會較遠(Lee, Polak, & Bell, 2009b),機車縱向跟車次模型 將此現象整合入 Gipps 的跟車模型(Gipps, 1981)來模擬機車的跟車行為。 斜(橫)向跟車次模型是用來形容機車的斜向跟車現象,機車常行駛在同一車道內另 一輛車的斜後方或側邊,並保持相似的速度。此次模型以跟車角度、速度及速度差 為自變數,以線性模型來描述此斜(橫)向跟車的距離。 路徑選擇次模型是以機車與周邊車輛之運動學關係,如速度、速度差、間距、相對 位置等關係,以多向羅吉特模式(multinomial logit)來描述機車下一步側向移動方向的 選擇。
3.3.3.3 BikeSim 介面 Bikesim 的個體自主式模擬架構及物件導向程式結構,非常適合擴充不同的交通模型進入 模擬系統;另 Bikesim 具有視覺化介面,以動畫呈現車流互動過程,並收集模擬過程相關微 觀及巨觀之資料。將所建構的機車的行為模型植入系統中,系統中之個體以所給予的行為模 型做互動與行動的規則,所呈現之模擬結果及資料,可用來觀察及測試行為模型之效果。 Bikesim 非常適合用來做為本研究行為模式驗證、模式敏感度分析之工具。 圖 3.10 為 BikeSim 之主要介面,其中 1 號方框處為模擬動畫的控制列,包含開始、暫停、 停止、重置、清除畫面、離開等功能。2 號方框處為動畫顯示區域,而 3 號方框處則為模擬 參數的控制區,在此處可以進行各項參數之調整,參數調整共分成四種類別,分別為模擬控 制及動畫顯示調整。 圖 3.10 BikeSim 操作介面 1. 模擬控制 模擬控制主要是在模擬開始前,讓使用者選擇如何進行模擬。使用者可選擇使用資料庫 軌跡檔或是手動輸入道路幾何與交通量資訊,其介面分別如圖 3.11 與圖 3.12 所示。當選擇手 動輸入時,可利用如圖 3.13 的介面輸入車種比例、各車種之期望速度等等之參數。而號誌時 相與其他道路幾何參數則可透過文字檔的方式輸入 BikeSim 中,號誌時相的輸入檔中包括紅 燈與綠燈開始的秒數;而道路幾何的輸入檔中,則包含街道寬度、各車道的寬度、機車停等 區寬度以及公車站位置;車輛軌跡檔中包含車輛編號、種類、車長車寬以及每一秒位置等資 訊,輸出的檔案則會和軌跡檔格式一樣。若是選擇使用資料庫軌跡檔時,則可選擇產生車輛 的方式。而無論是選擇手動或是軌跡檔,均可以設定模擬次數、選取檔案以及各項模式的開 關。 1 2 3
圖 3.11 模擬控制介面 (檔案輸入-基本資料及軌跡資料庫讀取) 圖 3.12 模擬控制介面 (手動輸入-基本資料讀取) 圖 3.13 模擬控制介面 (手動輸入-道路交通量資訊界面) 2. 動畫顯示調整 動畫顯示則是顯示當前模擬的資訊以及讓使用者調整模擬動畫顯示的項目與模擬速度。 顯示的資訊包括顯示目前模擬時間、號誌週期、模擬週期。調整是否顯示的項目包括車輛編 號或速度、號誌位置、公車站範圍、路段範圍等。
圖 3.14 動畫顯示調整介面 3.3.3.4 BikeSim 其他模擬功能 於本期計畫之前,BikeSim 即已具備基本之混合車流模擬功能。而為了配合本計畫之資 料與增加使用者之便利性,因此新增了下列功能: 1. 選擇模擬次數的功能,該功能讓使用者進行多次模擬 2. 是否顯示模擬的動畫,以便能夠快速的完成模擬 3. 新增了透過讀取檔案的功能,透過讀取資料來取得號誌以及車輛軌跡的資訊 其中第三項功能為讓使用者選擇是否要透過軌跡檔來生成車輛,或是透過程式亂數自動 產生車輛。當使用者選擇透過軌跡資料庫生成車輛時,又可選擇以下兩種方式,如圖 3.15 的 方框 1,而車流模擬畫面如圖 3.16 所示: 1. 以軌跡檔之實際位置與時間來產生車輛 當使用者選擇此方式時,又可選擇是否要重現某一車種的軌跡資料,如圖 3.15 的方框 2。” 上游進入”之選項為透過軌跡檔產生車輛第一秒的位置,再透過模式模擬車輛在道路上行 駛行為,而”軌跡重現”之選項則是直接顯示車輛在軌跡檔中每一秒的位置。 2. 先計算軌跡檔中車輛的平均流量後,在由模擬軟體本身來產生車輛 1 2
圖 3.16 車流模擬軟體模擬畫面
3.4 小結
本章介紹本研究架構。並針對研究問題定義與實證分析及歸類之架構進行說明。資料 蒐集,模式構建與各模式之實證分析、模式驗證模擬則於後續章節詳述。