以多通道偵測器觀察流動注入分析訊號之空時差異
93
0
0
全文
(2) 以多通道偵測器觀察流動注入分析訊號之空時差異 Investigation of The Difference Between The Spatial and Temporal Signals in Flow Injection Analysis Using A Multi-Channel Detector. 研究生 :張凱傑 指導教授:余 艇 博士. Student:Kai-Chieh Chang Advisor:Dr. Tiing Yu 國立交通大學. 應用化學研究所 碩 士 論 文. A Thesis Submitted to Institute of Applied Chemistry National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master of Science In Applied Chemistry September 2006 Hsinchu, Taiwan, Republic of China.. 中華民國九十五年九月.
(3) 以多通道偵測器觀察流動注入分析訊號之空時差異 學生: 張凱傑. 指導教授: 余 艇. 國立交通大學應用化學研究所. 摘要 流動注入分析法是一種使用相當廣泛的自動化分析技術,其記錄 訊號的波形常呈現不對稱,並且有拖尾(tailing)的現象。根據傳統理 論的解釋,產生波形拖尾的主要原因是由於流體以層流形式流動,使 得樣品在管路內產生分散現象,以及管路本身的瑕疵使得流體產生變 化。最近有文獻中提出時間效應的假說,由於樣品在管內的空間分佈 狀態隨時間一直在改變,而傳統單通道偵測器收集到的訊號其實是樣 品在管內不斷變化累積的結果,使得測量結果與樣品在管路內的空間 分佈並不相同,因而產生訊號拖尾之結果。 本研究以多通道偵測器觀察流動注入分析系統中,樣品在管路內 的空間分佈狀態(空圖),以及記錄隨流析時間得到的訊號圖形(時 圖),對實驗所得波形各指標參數,包含不對稱因子、分散係數等進 行比較,以及進行「空時疊圖」的波形比較,發現空圖與時圖有很明 顯的「空時差異」,實驗結果符合空時扭變高斯方程式的理論基礎, 證明傳統偵測器所得的波形呈現拖尾的原因,有很大比例是由「時間 i.
(4) 效應」造成的。並證明經驗分散係數的計算方法可得到樣品在管內的 分散係數平均值。. ii.
(5) Investigation of The Difference Between The Spatial and Temporal Signals in Flow Injection Analysis Using A Multi-Channel Detector Student : Kai-Chieh Chang. Advisor : Tiing Yu. Institute of Applied Chemistry National Chiao Tung University. Abstract Flow injection analysis (FIA) is widely used as an automatic analysis technology. The FIA signals often appear in asymmetric tailing peaks. According to the traditional theory, the tailing phenomenon occurs because the fluid moves in the form of laminar flow that results in dispersion in the FIA manifolds. Furthermore, the defects of the hardware itself also contributes to the fluid change, thus to the skewness of the peak shape. Recently a hypothesis of temporal effect is proposed to explain the tailing phenomenon. Because the spatial distribution of the sample in the FIA manifolds changes with time, the recorded signal from a traditional single-channel detector is actually the accumulation result of the constant signal variation of the sample in the manifold. Accordingly, the recorded signal as a function of time is different from the true spatial distribution of the sample in the manifold. This phenomenon results in tailing peak, even though the spatial distribution of the sample appears considerably symmetric. This research scrutinizes the spatial distribution of the sample in the iii.
(6) FIA manifolds and the peak shape recorded as a function of time simultaneously using a multi-channel detector. Obvious difference is observed by comparing peak shapes between spatial and temporal profiles. This study confirms that the temporal effect is the major factor for the skewed FIA peaks. In addition, the theoretical foundation of the temporally convoluted Gaussian equation proposed in the literature is verified. Furthermore, the method for calculating the dispersion coefficient using the temporal signal is validated by the experimental spatial signal.. iv.
(7) 謝誌 終於到了寫謝誌的時候了,也代表著研究所的兩年生涯到此已告 了一個段落,回想起從大學進入交大再到了研究所,其中的點點滴 滴、歡樂與憂愁、迷茫與堅定,這段時間所經歷的一切一切已深深地 烙印在我的腦海裡,在這個人生的轉折點上,我要先感謝恩師余艇教 授,引領我進入學術的殿堂,給予我研究與實驗上的指導;感謝白書 禎教授以其新穎的理論讓我接觸到不同的觀點;感謝陳月枝教授在百 忙中抽空來參加我的口試,並感謝諸位口試委員指正我的論文。 謝謝淑慧學姐一直以來很熱心地幫助我,才能讓我順利的畢業, 還有其他學長姐們在實驗上的幫助:俊竹、月杏、經緯與俊宏。謝謝 淑媺平常帶給實驗室歡樂,並且在日常事務上幫助我。謝謝從大學到 研究所當同學的秀琴,帶給我積極努力的觀念。並謝謝鈺評、霆琪與 士宗在我寫論文時還幫我慶生,並為我準備口試相關的東西,祝你們 能夠順利畢業。也謝謝隔壁實驗室的大秉、哈比人、阿嚕咪、冷翰、 阿川、阿爆、松甫與培真使我的研究生涯中多了許樂趣。另外感謝大 學同學魔頭、阿盛、阿邦、凱哥、拍郎、小殷…等的鼓勵與支持。 最後要感謝爸媽的支持,讓我能專心學業與研究。. v.
(8) 目錄 中文摘要..................................................................................................... i 英文摘要................................................................................................... iii 謝誌.............................................................................................................v 目錄........................................................................................................... vi 圖目錄....................................................................................................... ix 表目錄....................................................................................................... xi 第一章. 緒論........................................................................................1. 1.1 流動注入分析法簡介 .................................................................1 1.2 傳統流動注入分析理論 .............................................................2 1.3 空間與時間效應 .........................................................................3 1.4 空時差異 .....................................................................................4 1.5 研究動機與目標 .........................................................................4 第二章. 流動注入分析法的波形方程式推導..................................11. 2.1 流動注入分析系統的基本參數 ...............................................11 2.2 空時差異的理論基礎 ...............................................................12 2.3 標準偏差 (standard deviation)的推導 .....................................14 2.3.1 起始條件變異係數 ........................................................15 2.3.2 縱向分散變異係數 ........................................................16 vi.
(9) 2.3.3 結合「起始條件」和「縱向分散」的空間波形方程式 ...................................................................................................17 2.3.4 其他空間波形參數 ........................................................17 2.4 記錄波形方程式之推導 ...........................................................18 2.4.1 其他記錄波形參數 .........................................................19 2.4.2 加入時移的記錄波形方程式 ........................................19 2.5 以實驗參數代入的記錄波形方程式 .......................................21 第三章. 實驗......................................................................................25. 3.1 藥品............................................................................................25 3.2 儀器裝置 ...................................................................................25 3.3 儀器組裝 ...................................................................................26 3.4 樣品的選擇與製備 ...................................................................28 3.5 實驗參數的測量 .......................................................................29 3.6 再現性測試 ...............................................................................31 3.7 實驗流程 ...................................................................................31 第四章. 結果與討論..........................................................................39. 4.1 數據前處理 ...............................................................................39 4.2 波形指標參數 ...........................................................................40 4.2.1 基本參數 ........................................................................40 4.2.2 不對稱因子 (Asymmetry factor) (Af) ...........................41 vii.
(10) 4.2.3 分散係數 ........................................................................41 4.2.3.1 利用反覆代入法逼近 D*值 ................................42 4.2.3.2 以實驗參數表示的 D*值和 Z 值........................43 4.2.3.3 空間分散係數 .....................................................44 4.2.3.4 求取空間波形質心位置的方法 .........................45 4.2.3.5 以質心位置計算的空間分散係數 (D’).............45 4.3 轉軸與疊圖 ...............................................................................46 4.4 數據結果與討論 .......................................................................46 4.4.1 空圖結果 ........................................................................47 4.4.2 時圖結果 ........................................................................50 4.4.3 綜合分析 ........................................................................52 第五章. 結論......................................................................................74. 參考文獻...................................................................................................75 附錄 A. 符號定義表........................................................................79. A.1 實驗參數符號表.......................................................................79 A.2 波形方程式參數符號表 ..........................................................79 A.3 實驗所得波形指標參數符號表 ..............................................80. viii.
(11) 圖目錄 圖 1 單線流動注入分析系統 ..................................................................6 圖 2 流動注入分析法波形及其指標參數 ..............................................7 圖 3 樣品受到層流和擴散的影響 ..........................................................8 圖 4 空間與時間效應 ..............................................................................9 圖 5 空圖和時圖的定義 .........................................................................10 圖 6 流動注入系統的基本參數 ............................................................22 圖 7 空時疊圖 ........................................................................................23 圖 8 起始變異係數 ................................................................................24 圖 9 實驗裝置示意圖 ............................................................................33 圖 10 燈源的放射波長和濾片的穿透波長 ...........................................34 圖 11 管路纏繞示意圖...........................................................................35 圖 12 黃色四號的結構與 UV 光譜圖...................................................36 圖 13 實驗再現性測試結果-時圖 ......................................................37 圖 14 實驗再現性測試結果-空圖 .......................................................38 圖 15 積分法求波形面積的示意圖 ......................................................55 圖 16 不對稱因子的定義 ......................................................................56 圖 17 空間波形的質心位置 ..................................................................57 圖 18 轉軸示意圖 ..................................................................................58 ix.
(12) 圖 19 不同流量的空圖 ..........................................................................59 圖 20 空圖波形指標參數關係圖 ...........................................................61 圖 21 不同流量的時圖 ...........................................................................63 圖 22 時圖波形指標參數關係圖 ...........................................................65 圖 23 空時疊圖 .......................................................................................67. x.
(13) 表目錄 表 1 實驗再現性測試結果-時圖各波形指標 .....................................37 表 2 實驗再現性測試結果-空圖各波形指標 .....................................38 表 3 流量 0.480 mL/min 的空圖波形指標參數 ...................................68 表 4 流量 1.002 mL/min 的空圖波形指標參數 ....................................68 表 5 流量 2.016 mL/min 的空圖波形指標參數 ....................................69 表 6 流量 3.996 mL/min 的空圖波形指標參數 ....................................69 表 7 流量 8.046 mL/min 的空圖波形指標參數 ....................................70 表 8 流量 1.002 mL/min,質心位置 411.3 cm 前後各 4 組的波形不對 稱因子.......................................................................................................70 表 9 流量 0.480 mL/min 的時圖波形指標參數 ....................................71 表 10 流量 1.002 mL/min 的時圖波形指標參數 ..................................71 表 11 流量 2.016 mL/min 的時圖波形指標參數 ..................................72 表 12 流量 3.996 mL/min 的時圖波形指標參數 ..................................72 表 13 流量 8.046 mL/min 的時圖波形指標參數 ..................................73. xi.
(14) 第一章. 緒論. 1.1 流動注入分析法簡介. 對大量樣品進行分析時,我們常常需要一種操作簡便並且能快速 地提供分析所得資訊的方法,自 1975 年 Ruzicka 和 Hansen [1]提出 流動注入分析法(Flow Injection Analysis, FIA)以來,該系統可以將傳 統上需要人工作業的步驟,例如加入樣品、試劑、混合反應、送入偵 測器等過程,整合在一個預先設計好的管路中依序完成,達到自動化 分析,因此流動注入分析法已經逐漸應用在工業、農業、醫藥等各個 領域的檢測上。 一個最簡單的單線流動注入分析系統(single-line FIA)如圖 1 所 示,基本架構包含幫浦(pump)、樣品注入閥(sample injection valve)、 管路(tubing)、混合迴圈(mixing reactor),以及一個偵測器(detector)。 幫浦推動管路中的載液(carrier)與試劑(reagent),在樣品注入後順著管 路向前移動,經過一段混合迴圈充分反應後,送入偵測器測得訊號。 流經偵測器的樣品被記錄器以「時間對訊號值」的方式記錄時,可以 得到一組時間對應訊號強度的波形,如圖 2,此波形可訂出四種指標 參數:波高、波寬、面積、波峰位置。. 1.
(15) 1.2 傳統流動注入分析理論. 觀察流動注入分析系統所得的波形時,可以發現波形呈現不對 稱,並且有拖尾(tailing)的現象。根據 Kolev [2]整理相關的波形理論 及相關教科書 [3~4],認為產生波形拖尾的主要原因是樣品進入管路 後會發生分散(dispersion)的現象,而此現象主要是由於層流(laminar flow)造成的 [5~7]。在理想狀態下,樣品注入後在管路內會以塞狀流 (plug flow)的形式在管內移動,樣品區帶向兩側的擴散速率相等,最 後濃度分佈會呈現對稱的高斯分佈(圖 3(a))。然而,真正流動時,流 體受到管壁摩擦作用影響,在管路中心樣品摩擦力小,流速大,而靠 近管壁的樣品摩擦力大,流速慢,導致管內流速呈現拋物線或彈頭型 分佈,造成沿線的濃度分佈(longitudinal distribution)為一「不對稱」 的波形,此樣品區帶流過偵測器後便被記錄到一個拖尾波形(圖 3(b))。 另外也有相關文獻提到流體流動時接觸到的硬體,包括管路、接 頭、注入閥、偵測器光徑,因為彼此形狀大小不同產生的流體變化, 進而影響到濃度分佈的對稱性,造成所得波形不對稱[8~10]。 以往推導流動分析的數學模型都從一條基礎的波形表示式開 始,再進一步與實驗結果比較來修改參數,通常根據 Fick’s law 的物 理擴散並配合高斯方程式為基礎結構,並加上其他修正,例如:指數 修正高斯(Exponential Modified Gaussian, EMG)[11~14];或多項式修 2.
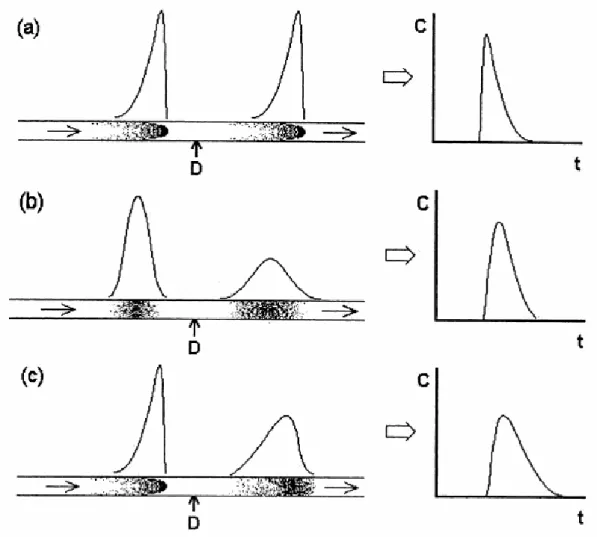
(16) 正高斯(Polynomial Modified Gaussian, PMG)[15~17]。. 1.3 空間與時間效應 由 Pai 於 2002 年發表的文獻 [18] 中指出:在流動注入分析系 統中,影響波形變化的因素有兩個,一個是空間效應(spatial effect), 另一個則是長期以來被忽略的時間效應(temporal effect)。 圖 4 說明空間效應和時間效應對偵測器所收集到之訊號的影 響。空間效應如圖 4(a),假設樣品在流經管路過程中分佈狀態不隨時 間而改變,樣品由於管路或其他作用力影響導致空間分佈不均勻,即 波形呈現不對稱狀態,在經過偵測器收集訊號後,會得到一個僅左右 方向相反,但訊號強度分佈相同的不對稱波形(方向相反是因為管路 尾端的樣品先抵達偵測器,而管路頭端的樣品後抵達偵測器)。這時 我們稱這種樣品產生波形不對稱的原因是空間效應。 時間效應如圖 4(b),假設樣品在管路內呈現對稱分佈,在流動時 向兩邊對稱擴散,樣品在管路內的狀態隨時間一直在改變(濃度、寬 度、波峰位置),在經過偵測器收集訊號後,還是會得到一個不對稱 的波形。這時我們稱這種樣品產生波形不對稱的原因是時間效應。然 而,在真實情況下(如圖 4(c)),空間效應和時間效應會一同影響樣品, 造成波形呈現不對稱分佈。. 3.
(17) 1.4 空時差異 Pai 指出,由傳統偵測器所得的波峰圖形並非樣品在管路內的真 實分佈,這是由於傳統偵測器在收集訊號的同時,樣品在管內的空間 分佈狀態隨時間一直在改變,使得測量結果與樣品在管路內瞬間的空 間分佈有一定差異 [18~19],這個差異我們稱為空時差異。Pai 認為, 這種差異普遍地存在於採用傳統道偵測器的流動型系統內,不僅是流 動注入分析系統,在層析系統中也應該存在這種現象,並在 2003 年 提出相關的研究 [20~22]。因此推斷以往的波形理論在忽略空時差異 的情況下,如果從實驗結果來推測樣品在管路內的變化將會產生誤 差。 在這裡我們先定義:固定一個單通道偵測器的位置,隨時間來擷 取樣品通過偵測位置的訊號,所得的圖形稱為時圖,傳統的偵測器都 屬於單通道偵測器。如果使用多通道偵測器,可以同時偵測大範圍的 樣品分佈,所得的圖形稱為空圖 (圖 5)。. 1.5 研究動機與目標. 在流動注入分析系統中,樣品在管路中流動時,由於空管中會產 生明顯的分散現象,導致樣品在通過偵測器的同時,其分佈狀態劇烈 改變,因此我們預期在流動注入分析系統中,空時差異應該會較為明 4.
(18) 顯。 為了要證明樣品在管路內的空間分佈與由單通道偵測器所得的 波形有所差異,本實驗室設計一種新的偵測系統—多通道偵測系統, 可同時得到大範圍的觀測視窗(長達 21 公分)以取得樣品在管路中的 空間分佈,也可以隨時間來收集樣品通過偵測位置的訊號。 本研究的目標為:設計一套簡單的流動注入分析系統,利用多通 道偵測系統來得到空圖和時圖,並進一步測量相關波形參數,以便比 較空圖波形與時圖波形的差異,並說明 FIA 訊號不對稱之原因。. 5.
(19) P. S. M. D. 圖 1 單線流動注入分析系統 基本架構包含幫浦(P);樣品注入閥(S);管路;混合迴圈(M);偵 測器(D)。. 6.
(20) Abs. h*. At*. tp*. time. W. 圖 2 流動注入分析法波形及其指標參數 上圖為波形示意圖,可以明顯看到波形呈現不對稱並且有拖尾的 現象。此波形可訂出四種指標參數:波高(h*, abs)、波寬(W, s)、面積 (At*, abs-s)、波峰位置(tp*, s)。. 7.
(21) (a). (b). 圖 3 樣品受到層流和擴散的影響 上層實心圖是樣品在管路內的濃度分佈,下層圖是偵測器收集的 濃度號對時間作圖。(a)樣品在管內被 plug flow 帶動,樣品區帶僅受 擴散(diffusion)影響向兩側等速擴張,最後呈現濃度分佈對稱。(b)左 圖流體受到管壁摩擦力影響,樣品因此受到層流影響,在管內濃度分 佈不對稱,右圖除了受層流影響,樣品還會擴散,最後偵測器得到一 個不對稱的波形。. 8.
(22) 圖 4 空間與時間效應 左圖為質量分佈圖,右圖為偵測器收集的圖譜(D:偵測器,C: 樣品濃度,t:時間) (a)空間效應(b)時間效應(c)真實情況[18]. 9.
(23) 單通道偵測器. 多通道偵測器. 訊號強度. 訊號強度. 時間. 位置. 時圖. 空圖. 圖 5 空圖和時圖的定義 時圖的橫座標單位是流析時間,空圖的橫座標單位則是空間(管 路位置)。. 10.
(24) 第二章. 流動注入分析法的波形方程式推導. 在進行研究前,我們需要詳細地了解時間效應的理論基礎以便設 計實驗,首先回顧由國立台灣大學海洋研究所 白書禎教授的學生 賴 宜鴻所撰寫的論文[19],該論文中以時間效應的概念為基礎,推導出 一條適用於流動注入分析法的波形方程式。. 2.1 流動注入分析系統的基本參數. 在推導公式前,我們需要先定義典型的流動注入分析系統中所包 含的實驗參數(如圖 6),參數陳列如下: (a) 樣品體積 (Vs, mL) (b) 樣品濃度 (C0, mM) (c) 管路截面積 (a, cm2) 樣品流經管路的截面積,可由管內半徑 (r) 求得,即 a = πr2。 (d) 載液流量及線性流速 (Q, mL/s;u, cm/s) 指幫浦輸出的流量,如果將此流量除上管路截面積,則可以得到 樣品質量中心在管路中受載液推動的平均移動速度,假設管路截面積 不大,此速度可視為一維方向上的流速,故稱為線性流速 (u),即 u = Q / a。. 11.
(25) (e) 總管路體積及長度 (Vtotal, mL;Ltotal, cm) 指樣品從未注入前的質量中心到達偵測器所經的總體積,它包含 一半的樣品體積 (Vs)、管路體積 (Vc) 與一半的偵測器體積 (Vd), 其 公式為 Vtotal = 0.5 Vs + Vc +0.5 Vd。如果將總管路體積除上截面積即可 得總管路長度 (Ltotal),Ltotal = Vtotal / a。 (f) 樣品到達時間 (tp, s) 樣品質量中心從注入前到達偵測器所需的時間,它相當於總管路 體積除上載液流量,即 tp = Vtotal / Q;或是總管路長度除上流速,即 tp = Ltotal / u。 根據以上參數之說明,有兩點要特別注意,第一,在實驗中可以 直接測量到的參數是流量 (Q) 與體積 (V),體積包含管路體積、樣 品注入體積,幫浦流出的載液體積等,然而在進行公式推導時使用的 是一維方向上的參數,因此需要將體積與流量除上截面積換算成長度 與流速。第二點要注意的是在實驗參數中的流量 (Q) 是測量一段時 間內由幫浦推出的載液體積,再將載液體積除上所花的時間即可得 之,所以此值指的是系統的平均流量。. 2.2 空時差異的理論基礎. 在理想狀態下,樣品注入管路內受載液推動,樣品區帶向兩側的. 12.
(26) 擴散速率相等,樣品擴張的程度可用標準偏差 (σ) 表示 [18~19],假 設管路截面積不大,只需考慮樣品在一維方向上的擴散,而樣品濃度 分佈可用高斯方程式來呈現,如下所示:. C ( L) =. −(. AL 2π σ L ( L p ). e. L− Lp 2σ L ( L p ). )2. (2.1). 其中 AL 為空間軸上的波形面積(mM-cm),它與樣品注入量成正比, 在擴張的過程中為定值;Lp 為波峰頂點所在的位置;而擴張程度會 隨樣品在管路中移動距離開根號 ( L ) 成正比,即 σ L = μ L L ,μL 為 空間軸上的擴張係數,將此式帶入公式 2.1 可得 L− Lp. −( AL μ e L C ( L) = μ L 2πL p. 2 Lp. )2. (2.2). 此方程式的各項參數經過軸換算後,可以得到一條投射在時間軸上的 波形方程式。 t −t p. −( At μ C (t ) = e t μt 2πt p. 2t p. )2. (2.3). 上式中的 At、μt、tp 為時間軸上的波面積、擴張常數和樣品到達偵測 器的時間。過去認為時間軸可藉由長度除上流速互換 (t = L / u),而 將此公式視為記錄波形方程式,實際上這是一種邏輯上的誤解,因為 標準偏差會隨樣品在管內移動的距離改變,換句話說,標準偏差是時 間的函數,並非定值。因此 Pai 將公式 2.3 中根號內 [18~19],從原 13.
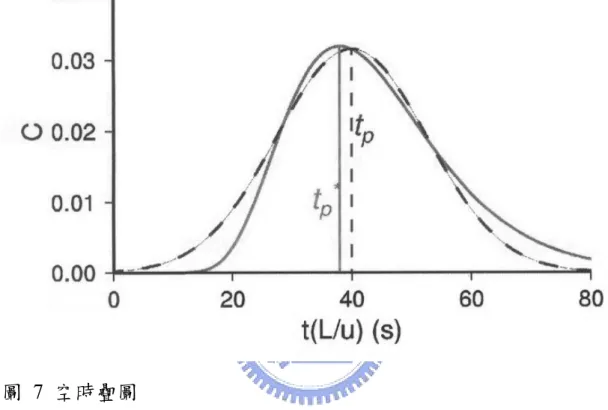
(27) 本代表時間 tp 時的標準偏差值,改成會隨時間 t 而變化的標準偏差 值,根據以上概念,可得到偵測器所記錄的波形方程式,如下所示: t −t p. −( At C (t ) = e μt μt 2πt. 2t. )2. (2.4). 此方程式稱為空時扭變高斯方程式 (Temporally Convoluted Gaussian Equation,簡稱為 TCG),它並未包含任何物裡不對稱因素,如:流 場、樣品注入方式、管路結構等。 由公式 2.3 和 2.4 做圖可得到兩個波形,這兩組波形之波峰位置 分別定義為 tp 與 tp* ,將兩圖重疊後(圖 7),可以發現兩者波峰位置 不同 (tp ≠ tp*),Pai & Chiao 將兩者差距定義為時移 (temporal shift) [23],符號為 Φ。值得一提的是公式 2.3 的圖形呈現對稱分佈,而公 式 2.4 的圖形則是不對稱且有拖尾的現象,較為吻合流動注入分析系 統所得之波峰形狀。. 2.3 標準偏差 (standard deviation)的推導 前面已提到樣品在管內的擴張程度可用標準偏差 (σL, cm) 表 示,在流動注入分析系統中,會影響樣品擴張的原因有很多種,例如: 起始條件 (initial condition)、縱向分散(Longitudinal dispersion)、分子 擴散 (molecular diffusion)、管路缺陷 (defect of manifold)…等因素, 要定量這些因素對擴張的影響時,可以採用變異係數 (variance) (σ2) 14.
(28) 的方式將個別因素的影響相加 [24~25],再開根號求得整體標準偏 差,因此,變異總和 (σL2) 可表示為: 2 2 2 2 σ L2 = σ initial + σ dispersion + σ diffusion + σ manifold. 由於在流動系統中,縱向分散現象遠比分子擴散現象來的明顯,因此 忽略後者的影響,此外管路缺陷產生的作用較為複雜,可能引起非一 維方向上的擴散,並且難以定量,因此在這邊暫時不考慮其影響。最 後只考慮兩項因素對波形擴張的影響。 2 2 σ L2 = σ initial + σ dispersion. (2.5). 接下來會分別介紹如何計算「起始條件」和「縱向分散」變異係數的 方法。. 2.3.1 起始條件變異係數. 在流動注入分析系統中,通常使用較大量的樣品體積,樣品注入 管路後會形成一個柱狀 (histogram-shape) 的樣品區帶,隨後會逐漸 擴張成平台狀 (plateau),最後趨近高斯分佈,因此樣品體積對波形初 始狀態的影響不可忽略。在管路中的柱狀樣品區帶,其起始區帶寬度 (initial zone width, W0, cm) 等於樣品體積除上管路截面積,即 W0 = Vs / a,將起始區帶寬度乘上樣品初濃度就可得到樣品在空間軸上的面 積,即 AL = W0 × C0,面積相當於樣品注入的總質量,我們可以將這 15.
(29) 個樣品在管路中變化的情形畫在一張「濃度對長度」的圖形上(圖 8(a))。 為了要定量起始狀態的影響 [19],我們將柱狀的樣品區帶轉換 為一個具有相等面積的高斯分佈(圖 8(b)),並假設樣品注入前的濃度 等於初濃度,即 C(0) = C0,將此條件代入公式 2.1 可得 AL. C ( 0) =. 2π σ (0). = C0. σ(0) 即為起始標準偏差,定義其符號為 σL0 (cm),再代入空間軸上的 面積公式 AL = W0 × C0 ,上式經過整理後可得起始標準偏差. σ L0 =. W0 ≈ 0.399W0 2π. (2.6). 將上式結果平方,即為起始變異係數 (initial variance)。. 2.3.2 縱向分散變異係數 利用「Fick’s Law」的擴散理論 (diffusion theory),可將樣品在流 動 狀 態 下 , 受 分 散 作 用 的 波 形 擴 張 率 (band broadening rate) (dσdispersion2 / dt) [26]表示為 dσ dispersion dt. 2. = 2D. 其中 D 為縱向分散係數 (Longitudinal Dispersion Coefficint),單位 cm2/s,而「2」表示樣品移動的前、後兩端皆有分散現象在同時作用。 16.
(30) 將上式兩邊積分後可得 σdispersion2 = 2Dt,代入 t = L / u,則可算出隨 距離變化的縱向分散變異係數。 2. σ dispersion = 2 DL / u. (2.7). 2.3.3 結合「起始條件」和「縱向分散」的空間波形方程式 將上面算出的兩項變異係數 (公式 2.6 和 2.7) 代入公式 2.5,則 可得到隨樣品移動距離而變的總變異係數,將此結果開根號,則為標 準偏差。因此,當樣品到達偵測器時 (L = Ltotal),標準偏差為: σ L ( Ltotal ) = σ L20 + 2 DLtotal / u. (2.8). 將上式帶入公式 2.1,可得到包含「起始條件」和「縱向分散」的空 間波形方程式。. 2.3.4 其他空間波形參數 (a) 空間軸上的擴張係數 (expanding coefficient on the L coordinate) (μL, cm1/2) 當波形沿著管路擴張時,其擴張程度與樣品在管路中移動距離開 根號 ( L ) 成正比,即 σ L = μ L L ,其中 μL 為空間軸上的擴張係數, 可由公式 2.8 推得為 μ L = 2 D / u 。 (b) 質量中心到達偵測器的波高 (peak height) (h, mM) 當 L = Ltotal 時,可由空間波形方程式算出波峰的高度,即波高 (h)。 17.
(31) h=. AL. (2.9). 2π (σ L20 + 2 DLtotal / u ). 2.4 記錄波形方程式之推導 從 2.2 節知道,管路內的空間分佈波形並非記錄器得到的波形, 但是 Pai 利用數學步驟可將空間波形轉換成記錄波形。首先將公式 2.1 的空間波形方程式轉換到時間軸上:. C (t ) =. −(. At 2π σ t (t p ). e. t −t p 2σ t ( t p ). )2. (2.10). 其中 σ t (t p ) = σ L20 / u 2 + 2 Dt p / u 2 其中的 At、tp、σt(tp) 等參數會對應空間軸上的參數,兩者的關係是 At = AL / u,tp = Ltotal / u,σt(tp) = σL(Ltotal) / u。傳統上將上式視為觀測方 程式,根據 Pai 的說明 [18~19],其實它只是以時間為軸的空間波形 方程式。接著將公式 2.10 內原本只隨 tp 而變的標準偏差變成時間 (t) 的函數,如此就可以得到記錄波形方程式,此方程式稱為空時扭變高 斯方程式。. C (t ) =. At 2π σ t (t ). e. −(. t −t p 2σ t ( t ). )2. 其中 σ t (t ) = σ L20 / u 2 + 2 Dt / u 2. 18. (2.11).
(32) 2.4.1 其他記錄波形參數 (a) 儀器感受係數 (Instrument sensitivity) (η, abs/mM) 樣品經過偵測器後得到的是相對強度的訊號而非真實濃度,對一 個濃度為 C0 的樣品,經過偵測器測量後得到的吸光值是 S0,兩者的 關係可以表示為 S0 = η × C0,其中 η 為儀器感受係數,會隨著不同的 儀器而變。 (b) 表觀波峰位置 (tp*, s) 由於記錄波形並非樣品到達偵測器時的空間波形,為了要與 tp 區 別,稱觀測到的波形最高點所對應的時間為 tp*。 (c) 波高 (h*, abs) 記錄波形最高點所對應的吸收值 (d) 時間軸上的擴張係數 (μt, s1/2) 已 知 空 間 軸 上 的 擴 張 係 數 為 μ L = 2D / u , 經 轉 軸 後 可 得 μ t = 2D / u 2 。. 2.4.2 加入時移的記錄波形方程式 公式 2.8 中的指數項中有一個 tp 值,無法由實驗直接測量,但 它與可測量的 tp* 間有個差距 Φ,此差距可利用 Pai & Chiao [23]推導 的時移公式來修正而得之。時移公式推導過程如下: 19.
(33) 假設樣品的空間波形完全對稱,將紀錄波形的頂點位置 tp* 代入 公式 2.11 中,進行一次微分後會等於零。 dC dt. =0 t =t *p. 簡化後可得. (t *p − t p ) 2 − 2t *p (t *p − t p ) − μt2t *p = 0 已定義兩者波峰位置差距為 Φ,即 Φ = tp - tp* 或 tp* = tp - Φ,上式可 以代換為 Φ 2 − (2t p + μt2 )Φ + μt2t p = 0. 此一元二次方程式的解為. Φ=. (2t p + μt2 ) − 4t 2p + μt4 2. 如果 tp2 >> μt4,則可將時移的解簡化成 Φ ≈ μ t2 / 2 ,再將 μ t = 2 D / u 2 代 入,則可得到本系統中時移的計算公式。 Φ≈. D u2. (2.12). 藉由此參數變可以倒推 tp 值 (tp = tp* + Φ),再代入公式 2.11 內,因此 一個包含時移的記錄波形方程式如下所示。. C (t ) =. At 2π (σ L2 0 / u 2 + 2 Dt / u 2 ). 20. e. −. ( t −t *p −Φ ) 2 2 2 (σ L 0 / u 2 + 2 Dt / u 2 ). (2.13).
(34) 2.5 以實驗參數代入的記錄波形方程式. 在建立紀錄波形方程式後,為了方便直接以實驗可測量的參數. (如:Q、Vs、C0…等) 代入運算,接下來會將可用實驗參數替換的項 目代入波形方程式 (公式 2.13)。原方程式中的 u、σL0 及 At 可分別用. Q / a 、 (Vs / a) / 2π 、與 ηC0 Vs / Q 代換,經整理後為. C (t ) =. ηC0Vs. −. Vs2 + 4πDa 2t. 其中 Φ ≈. e. ( t − t *p − Φ ) 2 (V s2. / π + 4 Da 2 t ) / Q 2. (2.14). Da 2 Q2. 方程式中有些參數很容易取得,如:Q、Vs、C0 等,但有個參數無法 直接用實驗參數來預測,即縱向分散係數 D,只知 D 與 u 有密切的 關係 [27~28],但關於 D 的計算,到目前為止仍屬於「經驗性」的推 斷,並會在後面章節內採用數學上的反覆代入法,以便更準確地估計. D 值。本章節中所使用的符號的定義皆整理於附錄 A.1 與 A.2。. 21.
(35) Area (a) Injector. Detector. Q. Q C0 Vs. Vc. Vd tp = Vtotal / Q. Vtotal = 0.5 Vs + Vc +0.5 Vd. 圖 6 流動注入系統的基本參數 此圖說明一個流動注入分析系統,管路截面積為 a (cm2),在注 入閥內有初濃度為 C0 (mM)、體積為 Vs (mL) 的樣品,受到幫浦以流 量 Q (mL/s) 推動。其總管路體積相當於一半的樣品體積 (Vs),加上 管路體積 (Vc) 與一半的偵測器體積 (Vd)。而樣品質量中心到達偵測 器的時間 tp (s),可由總管路體積除上流量求得[19]。. 22.
(36) 圖 7 空時疊圖 轉軸後的空間分佈曲線(黑色虛線),波峰位置 tp,與紀錄波形(灰 色實線),波峰位置 tp*,可以看出兩者不相等,其時間差距稱為「時 移」 ,由 Pai & Chiao 推導的公式計算得之[23]。. 23.
(37) (a) Conc.. C0 W0C0 AL = W0C0. u W0. L. (W0 = Vs / a) Ltotal. (b) Conc.. C0. Initial std dev σ L 0 = W0 / 2π. W0C0. AL = W0C0. u. L. W0 Ltotal 圖 8 起始變異係數. 圖(a) 樣品區帶注入管路後隨著移動距離變成高斯分佈,其面積 守恆。圖(b) 樣品起始區帶轉換為一個高斯分佈[29]。. 24.
(38) 第三章. 實驗. 3.1 藥品. Tartrazine(黃色四號合成色素),dye content approx. 90 %,購自於 SIGMA(Sigma Chemical Co., St. Louis, MO, USA)。 實驗用水為經過 Millipore(Beford, MA, USA) Milli-Q 處理的. 18.2MΩ 去離子水。. 3.2 儀器裝置. (a) 針式幫浦(Syringe pump) ISCO Model 260D(Lincoln, NE, USA),容量為 266.05 mL,可選擇 定壓力或定流量模式操作,最高輸出壓力為 7500 psi,最高輸出流量 為 107 mL/min。. (b) 往復式幫浦 (Reciprocating Pump) Series II Digital HPLC Pump(Pharma-Tech Research Company (Baltimore, Maryland, USA)) ,輸出流量範圍 0.01 mL/min ~ 9.99 mL/min。 (c) 進樣閥門 (Sample Valve) 進樣用的六向閥,購自 Valco(Houston, TX, USA)。. 25.
(39) (d) 管路 (Tubing) 透明的 Teflon PFA tubing (Upchurch Scientific (Oak Harbor, WA,. USA)),內徑為 0.04 英吋 (約為 1.0 公釐)、外徑為 1/16 英吋 (約為 1.6 公釐)。 (e) 固定管路的玻璃管 無色透明玻璃管,來源為國立清華大學科學儀器中心,內徑 1.25 公分、外徑 1.5 公分。. (f) 多通道偵測系統 光學盒由虹光精密工業股份有限公司(竹科工業園區研新一路 20 號)提供;435 奈米窄帶濾波片,穿透波長中心 435 nm,波峰寬度約. 50 nm,穿透度約等於 90 %,由裕群光電科技股份有限公司(桃園縣 龍潭鄉中豐路 618 號)製作;向量調整機台委託彥宏開發科技有限公 司(台北縣新莊市化成路 63 巷 71 號)設計製造。. (g) 樣品定量用 UV-Vis 光譜儀 型 號 為 Agilent8453 , 購 自 Agilent Technologies(Waldronn,. Germany),此儀器用來測量樣品吸收波長。. 3.3 儀器組裝. 為了要從流動注入分析系統中得到空圖與時圖,本實驗採用自行. 26.
(40) 設計並組裝的流動注入分析系統,並搭配多通道偵測器來收集樣品訊 號,實驗裝置組成如圖 9。. (a) 多通道偵測系統 整個系統包含多通道偵測器、濾波片與向量調整機台。多通道偵 測器從虹光公司提供的光學掃描器拆解下來,以掃描器的燈管與內部 光學盒作為本實驗所需之光源與多通道偵測器,光學盒視窗寬度為. 21 公分,連接光學盒與個人電腦之線路以及操作界面由虹光公司的 楊得志先生設計。 光源之放射光譜與濾波片之穿透波長範圍如圖 10 所示,光源強度 在 435 nm 左右最強,故需選擇在 435 nm 有吸收的樣品。並將濾波片 固定在光學盒的視窗上以過濾光源的其他放射波長。 向量調整機台分為兩個部份,第一個部份上可架設燈源、混合迴 圈與狹縫,第二個部份上架設光學盒(含濾波片),兩個部份可分別調 整彼此間的距離與高度,並調整狹縫寬度與光源射入光學盒的角度。. (b) 測量迴圈 在流動注入分析系統中,因樣品注入管路後會迅速擴張開來,以 本實驗之多通道偵測器的最大偵測範圍 21 公分而言,如果把管路與 偵測器平行放置,將無法完全觀測到樣品在管路中的分佈,此外有文 獻中提出將反應管路作成迴圈形 (coiled)、編織形 (knitted)或彎曲形. 27.
(41) (serpentine),甚至在管路中填入珠子,皆可降低軸向分散作用 (axial dispersion) 對擴張程度的影響 [24,30~31]。因此於本實驗中,在玻璃 管外圈的一側貼上雙面膠帶,將透明的 Teflon PFA tubing 纏繞在此 玻璃管後,用 3M 膠帶固定住,作成混合迴圈,將光源置於玻璃管中, 並在玻璃管另一側放置多通道偵測器(如圖 11),如此一來每一圈管路 中會有一個位置能被偵測器收集到訊號,將這些不同位置的訊號值以 「位置對訊號強度」作圖,就可以得到樣品在管路中的空間分佈波形。. (c) 樣品注入 本實驗採用轉閥注入法 (valve injection) 進樣,剪裁一段與管路 相同的 Teflon PFA tubing 當作樣品迴圈 (sample loop),其注入總體 積為「樣品迴圈體積」加上「注入閥內的體積」,總體積測量方法會 於下節(3.5(a))中介紹。. (d) 載液的推動 使用針式幫浦輸送實驗用載液(去離子水);往復式幫浦輸送用於 吸收校正的染料溶液,以避免染料污染針式幫浦,兩者透過六向閥連 接通往樣品注入閥的管路。. 3.4 樣品的選擇與製備. 根據光源與濾波片的可用波長範圍,選擇黃色四號作為本實驗的. 28.
(42) 樣品,其結構和吸收光譜如圖 12 所示。樣品以去離子水溶液配置成. 1000 mg/L (1.87 mM)。. 3.5 實驗參數的測量. (a) 樣品體積 (Vs, mL) 本實驗使用「染料注入法」來預估樣品體積 [19]。首先,將一已 知濃度的染料注入後,六向閥轉到輸出位置,然後注入去離子水並收 集於定量瓶中,加水至瓶上體積刻度,測量吸光值。接著,取幾組特 定體積的染料稀釋至相同體積,測量吸光值,做出一條染料體積對吸 光值的檢量線。最後將待測樣品體積吸光值代入,便可反推樣品的注 入體積。. (b) 流量 (Q, mL/s) 在固定幫浦流量下,整個管路系統的平均流量可以由「稱重法」 求出 [19]。用已稱重 (Wb, g) 的空瓶,收集流過整個系統中的去離子 水 x 分鐘 (如:4 分鐘),再測量總重 (Wt, g) 與收集液溫度 (T, ℃), 最後將總重減去空瓶重,再除上水溫所換算的密度 (d, g/mL) 以及收 集時間,即可得到流量 (Q, mL/min),或除上 60 得 (Q, mL/s)。 Q(mL / s ) =. Wt ( g ) − Wb ( g ) d ( g / mL) x(min)60( s / min). 將算出的流量除上管路截面積,即為線性平均流速 (u, cm/s)。. 29.
(43) (c) 多通道偵測器的吸光值校正 由於光源是放置於纏繞著管路的玻璃管中,故光線會穿過不同位 置的管路到達偵測器,多通道偵測器測量到的訊號可能會受到下列幾 項因素的影響: (1) 光源 ( 燈管發出的光強度不均以及強度隨時間變 化);(2)玻璃管(玻璃管壁厚度不均);(3)管路(管路受纏繞擠壓後,其 內徑不均);(4)偵測器(偵測器上每一個偵測點對光線的靈敏度),造 成訊號會有誤差存在,因此需要做吸光值校正的動作。將染料充滿整 個管路,以多通道偵測器測量吸收值,將測得吸收值最高的偵測點挑 出來,這些點相當於光線通過每一圈管路的最大光徑,然後到達偵測 器上的位置,照理來說這些點的吸收值大小應相同,故將這些偵測點 的吸收值平均,再除上每一點原本的吸收值,即可得到每一個偵測點 的吸收校正因子。. (d) 管路位置 要得到樣品在管路中的空間分佈波形,除了從每一個偵測點收集 訊號,還需要知道偵測點對應的管路位置 (L)。使用幫浦推動染料進 入空管路中,記錄染料前端(染料與空氣的接觸面)通過每個偵測點花 費的時間 (t),並用定量瓶收集流出的染料來計算流量,最後將時間 乘上流量再除以管路截面積,就得到偵測點對應的管路位置 (L = t ×. Q / a)。. 30.
(44) 3.6 再現性測試 為測量本偵測器之穩定性與再現性,選用濃度 1000 mg/L,體積. 299.4 μL 的樣品,以流量 2 mL/min ,操作 3 次實驗,以管路位置 410.7 公分處偵測器位置,取出其隨時間改變而收集到的樣品訊號來製作時 圖(圖 13、表 1),以及在流析時間約 100.5 秒時,取所有偵測點的訊 號對偵測位置來製作空圖(圖 14、表 2)。取上述三組時圖與三組空圖 的波形指標 (波高、波峰位置與波面積) 來計算精密度,計算結果顯 示,時圖波形指標精密度小於 2.85% ,空圖波形指標精密度小於. 1.6%,即表示機台穩定性良好,可繼續進行實驗。. 3.7 實驗流程. 實驗裝置架設完畢後先調整機台位置與角度,使光線通過管路進 入多通道偵測器,並在電腦操作介面上呈現訊號,調整完畢後測量管 路位置,測量完畢後再進行接下來的實驗。. (1)以去離子水充滿管路,並檢查管路內是否有氣泡,若有則去 除之;(2)依實驗條件設定針式幫浦流量;(3)設定電腦操作介面;(4) 注入樣品,並將儀器蓋上黑布避免受其他光源干擾;(5)開動幫浦進 行實驗並同時收集訊號;(6)從電腦操作介面上看到訊號恢復至原本 狀態即表示樣品已流出管路,此時停止收集訊號並開始測量幫浦流 31.
(45) 量。(7)若要進行下一組條件之實驗則重複上面(1) ~ (6)步驟,待當日 所有實驗完成後,進行該日實驗的吸光值校正。. 32.
(46) 11 10. 9 1 8. 7 6. 5 4. 3. 2. 圖 9 實驗裝置示意圖. 1:針式幫浦;2:往復式幫浦;3:幫浦控制用六向閥;4:樣品 注入用六向閥;5 ~7:測量迴圈(5)纏繞在玻璃管(6)上,內置燈管(7);. 8:狹縫;9:濾波片;10:多通道偵測器;11:個人電腦. 33.
(47) 圖 10 燈源的放射波長和濾片的穿透波長. 34.
(48) Detector Filter Slit Lamp Glass Column Teflon PFA Tubing. 圖 11 管路纏繞示意圖. 35.
(49) NaO3 S. OH. N=N. N. NaO. C. N. O SO3Na. Tartrazine2020mg/L ppm (in (in water) — Tartrazine water) 429 nm λmax = 429 nm A=0.911 A = 0.911. 1.5. Absorbance (AU). 1.0. 0.5. 0.0. -0.5. -1.0. 200. 400. 600. Wavelength(nm). 圖 12 黃色四號的結構與 UV 光譜圖 上圖為黃色四號的結構式;下圖為其 UV 光譜圖。. 36. 800.
(50) 1.0. 0.8. Abs.. 0.6. 0.4. 0.2. 0.0. -0.2 0. 50. 100. 150. 200. 250. Time (s). 圖 13 實驗再現性測試結果-時圖. 表 1 實驗再現性測試結果-時圖各波形指標 波形指標 面積 At* (Abs-s) *. 波高 h (Abs) 波峰位置 tp* (s). 重複組. Mean. Std.. RSD. 33.449. 34.138. 0.974. 2.85%. 0.807 99.483. 0.814 99.336. 0.022 0.722. 2.65% 0.73%. 1. 2. 3. 33.712. 35.252. 0.796 99.973. 0.838 98.552. 37.
(51) 1.0. 0.8. Abs.. 0.6. 0.4. 0.2. 0.0. -0.2 0. 100. 200. 300. 400. 500. 600. 700. Length (cm). 圖 14 實驗再現性測試結果-空圖. 表 2 實驗再現性測試結果-空圖各波形指標 波形指標 流析時間 t(s) ’. 面積 AL (Abs-cm) 波高 h’(Abs) 波峰位置 Lp’(cm). 重複組. Mean. Std.. RSD. 100.514. 100.538. 0.059. 0.06%. 137.5 0.802 404.9. 138.9 0.806 408.7. 1.2 0.004 6.5. 0.90% 0.46% 1.60%. 1. 2. 3. 100.494. 100.605. 139.8 0.809 416.2. 139.4 0.805 404.9. 38.
(52) 第四章. 結果與討論. 4.1 數據前處理 本系統使用的多通道偵測器裡,其線形 CCD 上有 10720 個像素. (即 10720 個偵測點),以相鄰 16 點做平均積分處理,即得到 670 個 訊號收集點,並以此 670 個點代表全部的偵測點。每次取樣的曝光時 間 (exposure time) 為 3.6 ms,對實驗條件的最高流量 8.046 mL/min 來說,每次取樣期間,樣品只會在管路中前進 0.6 mm,相對於一個 完整波形之寬度而言,此值甚小,故可忽略曝光時間對空間波形的影 響。每次取樣會記錄 670 個訊號收集點傳到電腦的資料,並且可依據 設定的取樣間隔 (sampling interval) 連續收集訊號,因此可得到一份 縱軸為取樣點、橫軸為時間的訊號記錄檔案。 數據處理步驟如下:由「訊號記錄檔案」找出在 670 個偵測點中, 光線通過最大光徑的訊號偵測位置,並將這些偵測點所得訊號分別乘 上 3.5(c)節提及的對應吸收校正因子,接著把這些偵測點的訊號搭配 每次取樣間隔累積的時間作圖,便可得到「時間對吸收值」的圖形, 這種隨流析時間作圖得到的圖形稱為時圖(傳統偵測器記錄得到的圖 形就是時圖),將這些時圖採平均法進行數據修飾處理,對相鄰 5 個 時間點平均 1~2 次,直到波形平滑至可接受的程度為止。. 39.
(53) 將以上處理過後的數據排列在一起,然後將每一「相同流析時間」 但「不同偵測位置」的訊號取出,依據偵測點對應的管路位置作「位 置對吸收值」的圖形,這種在同一時間取得多個偵測點的訊號,並以 管路位置作圖得到的圖形稱為空圖,將這些空圖採平均法進行數據修 飾處理,對相鄰 5 個位置平均 1~2 次,直到波形平滑至可接受的程 度為止。. 4.2 波形指標參數. 4.2.1 基本參數. 數據經過處理後可得到空圖與時圖,空圖與時圖的波形皆可訂出 下列指標參數:(1) 波高:波高代表波形中訊號的最大值;(2) 波峰 位置:即波高對應的位置,依據空圖與時圖其單位可為長度或時間;. (3) 面積:即波形下所涵蓋的面積。其中前兩種指標參數可以直接從 實驗數據得到,而面積則要經過計算後才可得知。本實驗採用積分法 來估計波形面積,此方法將兩個訊號值以及兩訊號值的時間或距離差 距以梯形面積相加 (見圖 15),計算公式為 A = ∑ ( y n + y n +1 ) × ( x n +1 − x n ) ÷ 2. 其中 yn 代表第一個訊號值,xn 為 yn 對應的位置;yn+1 代表第二個 訊號值,xn+1 為 yn+1 對應的位置,若 xn 與 xn+1 間隔差距越小,則 40.
(54) 由累加得到的面積越接近真實面積。為了區別由實驗波形所得的各指 標參數與理論中使用的參數,將實驗所得時圖的波形參數加上「*」, 而空圖的波形參數加上「’」 ,其符號的定義整理於附錄 A.3。. 4.2.2 不對稱因子 (Asymmetry factor) (Af) 流動注入分析系統得到的時圖波形通常呈現不對稱,並且有拖尾 的現象,可以採用不對稱因子 (見圖 16) 來定量此現象[13]:將波高 乘以 0.1 得到一個值 (0.1h),再以此值作水平線延伸至左右兩邊波 形,水平線與左半部波形會交於一點,此點與波峰位置的距離定義為. a;水平線與右半部波形會交於一點,此點與波峰位置的距離定義為 b,將 b 除以 a 即可得到不對稱因子,即 Af = b / a,若圖形呈現拖 尾,則 b 大於 a,所得 Af 會大於 1。由於空圖與時圖的波形左右方 向相反,為了方便與時圖作比較,因此空圖波形的不對稱因子計算方 式改為 Af = a / b。 4.2.3 分散係數. 當有了以上的實驗參數後,即可藉由空圖與時圖波形推算該系統 的縱向分散係數(D) (Longitudinal dispersion coefficient)[19]。要以其他 參數推算一個真實系統的 D 值並不容易,但根據理論上的時間軸波 形方程式 (公式 2.10),當 t = tp,指數項為 1,且 C(tp) = h,經過整理 41.
(55) 後可得到計算 D 的公式。. D=. At2 u 2 σ L20 − 4πh 2 t p 2t p. (4.1). 其中 tp、h、At 分別為波形位置、波高和波面積;u 為平均線性流速;. σL0 為起始標準偏差。但唯一有疑慮的是由實驗所觀察得到的時圖波 峰位置 (tp*) 與波高 (h*) 並非真正的 tp 與 h,所幸兩者相差不大。於 是假設 t *p ≈ t p ,讓指數項為 1, C (t *p ) ≈ h * ,仍可估計 D 值。此外根據 理論,由於空間波形不斷擴張,在單一位置的偵測器不斷收集到空間 波形瞬間的片段,所以時圖波形是由累積空間波形片段得來的,因此 這裡估算的 D 僅代表該系統的一個「平均值」 ,故以經驗縱向分散係 數 (empirical dispersion coefficient, D*) 稱之,藉以區別理論 D 值。 At*2 u 2 σ L20 D ≈ − 4πh *2 t *p 2t *p *. (4.2). 4.2.3.1 利用反覆代入法逼近 D*值 上一節得到的 D*值估算方法,是在 t *p ≈ t p 假設下算出來的。如 果想要進一步得到更準確的 D*值,可以藉由一個數學上的小技巧— 「反覆代入法 (Recursion Forward Method, RFM)」來代替繁瑣的數學 運算過程。此技巧常常用在複雜的數學關係式中來求 2 個未知數. (如:x, y),其原理是先忽略 y 的影響,算出 x 值 (x1),代回關係式 42.
(56) 中求 y 值 (y1),再將 y1 重新代回原式求 x (x2),如此反覆帶入便可得 到 x1, y1, x2, y2, x3, y3, x4, y4…,進而得到越接近真實的 x, y 值,至於 反覆代入的操作次數則依預定的準確度作調整。利用上述概念,先將 波形方程式中的指數項以未知數 Z 取代,則 D*經整理後得. D* =. At*2 u 2 Z 2 σ L20 − * 4πh *2 t *p 2t p. 其中 Z = exp. −. (4.3). ( t *p − t p ) 2 ( 2σ L2 0. / u 2 + 4 Dt *p / u 2 ). (4.4). 在公式 4.3 的關係式中包含兩個未知數:D*和 Z。先忽略指數項的影 響,令 Z = 1,算出的 D*相當於公式 4.2 的結果,將此預估值稱為 D*. (1st),表示第一次估算的分散係數。將算出的值代入公式 4.4 中求 Z, 求得的值稱為 Z (1st),代表指數項第一次預估結果。將 Z (1st) 代回 公式 4.3 求出 D*(2nd),再將 D* (2nd) 代入公式 4.4 中求 Z (2nd)。如 此不斷反覆地交替求 D* (1st, 2nd, 3rd,…) 和 Z (1st, 2nd, 3rd,…),藉以 逼近真實的 D*值和 Z 值。根據參考文獻 [19],在本實驗中採取操作 三次,因此,稍後在計算 D*值時,會以反覆代入法三次後所得的 D*. (3rd) 為主。 4.2.3.2 以實驗參數表示的 D*值和 Z 值 為了能直接由實驗參數與時圖的波形指標參數推算 D* 值和 Z. 43.
(57) 值,將 u、σL0 項以 Q、Vs、a 取代,並將求取 Z 公式中的 (tp* - tp), 其值相當於 “ - Φ”,所以用 “ –D* × a2 / Q2 ” 取代。經過整理後的公 式如下:. D* =. At*2 Q 2 Z 2 − Vs2 h *2 4πa 2 h *2 t *p. 其中 Z = exp − ( D. *2 4. a π ) /( Q 2 (V s2 + 4πa 2 D *t *p )). (4.5). (4.6). 4.2.3.3 空間分散係數. 上節已提到如何透過時圖波形來計算經驗分散係數,本實驗透過 多通道偵測器記錄的空圖可得知樣品在管內的空間分佈波形,並可根 據理論來計算樣品在管內的縱向分散係數[32],因此將由空圖得到的 分散係數為稱空間分散係數,在下文中會介紹如何計算空間分散係 數。 在理想狀態下,樣品在管內會擴散成對稱的高斯分佈,也就是說 波峰 (Lp) 是樣品的質量中心,代表著波形的質心位置 (Lm),且不對 稱因子等於 1。將理想的實驗參數代入公式 2.1,即 L = Lp,指數項會 為 1,且 C(Lp) = h,其中標準偏差項可由公式 2.8 得知,經過整理後 可得到計算 D 的公式。. D=(. AL2 u − σ L20 ) × 2 2L p 2πh 44. (4.7).
(58) 此公式與公式 4.1 都代表 2.3.2 節所述的縱向分散係數,唯一的差別 是公式 4.1 是由時間軸上的波形參數計算得來,而公式 4.7 是由空間 軸上的波形參數計算而得,兩者可藉由 t = L / u 互換。. 4.2.3.4 求取空間波形質心位置的方法 樣品的質量中心是波形的質心位置,而波形面積 (AL) 可代表樣 品注入量,因此計算實驗得到的空圖,其一半波形面積所在的位置視 為空間波形的質心位置 (Lm’)(如圖 17(a)),而波形的波峰位置代表測 得最大訊號的位置,因此質心位置並不等於波峰位置。具體計算方法 為藉由積分法尋找 1/2 AL’ 所在的梯形面積區塊,將該梯形區塊的兩 偵測位置以內插法求得積分面積等於 1/2 AL’ 的位置(如圖 17(b)),此 位置即為空間波形的質心位置 (Lm’),質心位置的波高為 (hm’),此計 算方法的準確度會在 4.4.1(b)節的空圖實驗結果中討論。 4.2.3.5 以質心位置計算的空間分散係數 (D’) 為了能直接由實驗參數與空圖的波形指標參數推算 D’ 值,將. u、σL0 項以 Q、Vs、a 取代,以及從上節得知空圖波形的質心位置 (Lm’) 與質心波高 (hm’) 代入公式 4.7,經過整理後的公式如下: D' = (. Vs2 AL'2 Q )× − '2 2 2πhm 2πa 2aL'm. 45. (4.8).
(59) 4.3 轉軸與疊圖. 若要進一步得知空圖與時圖的差異,可以嘗試將兩張圖疊在一起 比較,然而時圖是在固定的偵測位置收集訊號,因此空間上管路尾端 的樣品會先抵達偵測位置並在時圖上先出現,而管路頭端的樣品後抵 達偵測位置並在時圖上後出現,假設樣品在管內沒有變化,通過偵測 位置後可得到一個僅左右方向相反,但訊號強度相同的時圖,此時圖 即為空圖的「鏡像」,而將空圖轉變成這種時圖的步驟稱為「轉軸」. [32]。 要將空圖轉軸首先要定義一個鏡像面,此面即為時圖的偵測位置. (如圖 18),在本實驗中採用空間波形的質心位置 (Lm’) 當作鏡像面, 因此管路位置 (L) 經過鏡像後的位置 (L’) 為 L’ = Lm’ - (L - Lm’),再 除上流速 u 即可將空間軸投射到時間軸上,整理後的轉軸公式為 t=. 2 L'm − L u. (4.9). 到此空圖已變成通過固定偵測位置的時圖,再與要比較的時圖畫 在同樣的時間座標軸上,就可得到「空時疊圖」。. 4.4 數據結果與討論 以濃度 1000 mg/L、體積 299.4 μL 的樣品,對 5 種不同流量. (0.480、1.002、2.016、3.996、8.046 mL/min) 進行實驗,將 0.480、 46.
(60) 1.002 mL/min 視為低流速;2.016 mL/min 視為中流速;3.996 mL/min 視為中高流速;8.046 mL/min 視為高流速。實驗數據處理時,分別在. 5 個不同的管路位置隨流析時間記錄「吸光值對時間」的時圖,因此 5 種不同流量、每種流量有 5 個時圖,總共可以得 25 組時圖。並依 據理論時移(公式 2.12)計算出空圖質心的位置,再從實驗空圖中找出 最接近理論質心位置的波形,所以 25 組時圖就有 25 組對應的空圖。. 4.4.1 空圖結果. (a) 圖形變化趨勢 圖 19 (a) ~ (e) 分別為流量 0.480、1.002、2.016、3.996、8.046 mL/min 的空圖,每一張空圖內可以看到在流析過程中 5 個不同時間,由多通 道偵測器瞬間取得樣品在管路內的空間分佈波形。由圖可見,這 5 種 流量條件的實驗過程中,樣品的空間分佈波形都從管路前端移動到管 路後端,隨著波峰位置往右移,波形變得越矮越寬。這是因為當固定 流量時,流析時間越久,樣品區帶在管路中移動的距離越長,一方面 時間增加,提供樣品與載液有足夠的時間來充分混合,另一方面管路 增長,有更多的空間讓樣品分散開來,這兩者導致樣品擴張程度越大。. (b) 質心位置 (Lm’) 各流量空圖波形指標參數整理於表 3 ~ 表 7,表內波形編號 1 ~ 5. 47.
(61) 分別代表該流量的空圖中從左到右的波形。根據 2.1(f) 節所述,樣 品質量中心從注入前到達偵測器所需的時間,相當於總管路長度除上 流速 (u),即 tp = Ltotal / u,換句話說,樣品質量中心經過流析時間 (t) 後會移動到管路位置 Ltotal,其移動距離相當於流析時間乘上線性流 速,即 Ltotal = t × u。從實驗結果來看,流析時間乘上線性流速所得 的理論質心位置 (Lm),與多通道偵測器在該流析時間下取得的空圖 波形的質心位置 (Lm’) 相比,兩者誤差在 - 0.9% ~ 1.9% 之間,在可 接受範圍內,即證明空間波形質心位置的計算方法是可行的。. (c) 面積 (AL’) 隨著流析時間增加,取得的空間波形面積有稍微增加的趨勢(見圖. 20(a)),其相對標準偏差在低至中流速之間 (0.480 ~ 2.016 mL/min) 約 為 1.8%,到高流速時 (8.046 mL/min) 則出現略大的偏差,其值約為. 4.0%。 (d) 不對稱因子 (Af) 比較不同流速間,樣品從管路前端移動到管路後端的空間波形拖 尾的程度(見圖 20(b))。在低至中流速之間(0.480 ~ 2.016 mL/min),不 同管路位置的不對稱因子都接近於 1,波形大致上呈現對稱的高斯分 佈。其中在流量 1.002 mL/min 質心位置 411.3 cm 的波形,其不對 稱因子降到 0.882,與同流量下前面幾組相差甚大,但是在觀察該流. 48.
(62) 量下前後各 4 組波形(表 8)後,其不對稱因子約為 0.970 ± 0.047,因 此推測該時間下取得的空間波形可能受到管路瑕疵或流場不均勻等 因素,使得樣品與載液有較劇烈的混合,然而由於混合尚未達到平 衡,所以取得的波形呈現不對稱,但在稍後時間混合變得均勻,波形 也恢復到對稱分佈。 在中高流速時 (3.996 mL/min),不同管路位置的不對稱因子上下 跳動,推測因較高流速,樣品與載液的混合程度受到混合時間與分散 效應彼此影響,使得波形出現對稱分佈的次數減少。在高流速時. (8.046 mL/min),隨著樣品質量中心從管路位置前端移動到管路位置 後端,不對稱因子由 1.147 降到 0.729,推測在高流速時,樣品受到 較大的分散作用影響,並且沒有足夠的時間來充分混合,使得樣品移 動到管路後端時,空間分佈波形呈現不對稱。. (e) 空間分散係數 (D’) 由公式 4.8 可以從空圖中的各波形指標參數來計算空間分散係 數,本係數的計算方法有個先決條件,就是空間分佈波形必須是對稱 分佈。從圖 20(c) 觀察不同的流速,在低至中流速之間,其空間分佈 波形都接近對稱分佈,低流速的分散係數大致上隨波形質心位置右移 而稍微減小;中流速的分散係數則不隨質心位置而變。在中高至高流 速時,分散係數隨質心位置右移而增加,但是由於波形已經變得不對. 49.
(63) 稱,得到的分散係數只能作為一個粗估值。若觀察相近質心位置的空 圖波形(圖 20(d)),低流速有較小的分散值,而高流速則有較大的分散 值,符合一般對流速影響樣品擴張的認知。. (f) 其他參數 根據公式 2.8,樣品在管路中的擴張程度 (σL) 與樣品移動距離開 根號 ( Ltotal ) 成正比,由圖 20(e) 來看符合此趨勢;根據公式 2.9, 波高 (h) 則與移動距離開根號成反比,在圖 20(f) 中也符合此趨勢。. 4.4.2 時圖結果. (a) 圖形變化趨勢 圖 21 (a) ~ (e)分別為流量 0.480、1.002、2.016、3.996、8.046 mL/min 的時圖,每一張時圖內可以看到在 5 個不同管路位置,模擬傳統單通 道偵測器隨流析時間記錄樣品訊號而得到的波形。由圖可見,這 5 種 流量條件的實驗過程中,隨著偵測點的管路位置慢慢加長,記錄波形 的波峰位置越往右移,而且波形變得越矮越寬。這是因為當固定流量 時,管路越長,樣品到達偵測位置所花的時間越久,所以波峰出現的 位置也越慢。此外,時間增長也提供樣品與載液有足夠的混合時間, 導致波形擴張越大。. 50.
(64) (b) 表觀波峰位置 (tp*) 各流量時圖波形指標參數整理於表 9 ~ 表 13,表內波形編號 1 ~ 5 分別代表該流量時圖內從左到右的波形。從圖 22(a) 可以看到表觀波 峰位置與管路長度(Ltotal)成正比,造成原因如上節(4.4.2(a))所述。. (c) 面積 (At*) 不同管路長度所得的記錄波形面積約為一定值(見圖 22(b)),其相 對標準偏差在低至中流速之間約為 1.5%,到高流速時則出現略大的 偏差,其值約為 3.5%。. (d) 不對稱因子 (Af) 以固定流量改變偵測管路位置的時圖結果來看,所得記錄波形的 不對稱因子皆隨管路增長而降低(見圖 22(c)),也就是說,管路越長, 記錄波形會趨近於高斯分佈。原因是因管路增長,有足夠的空間與時 間讓樣品分散,使得從偵測器收到訊號開始到樣品質量中心抵達偵測 器,此時記錄波形可得到較大的 a 值;當質量中心通過偵測器後,其 空間波形仍不斷擴張,導致偵測器測到樣品訊號的時間延長,此時記 錄波形也得到較大的 b 值,兩個較大的值相除就得到較小的不對稱因 子。 若以固定偵測管路位置不同流量的時圖結果來看(見圖 22(d)),隨 著流速加快,不對稱因子也跟著上升。原因是由於在高流速時,樣品. 51.
(65) 質量中心較快抵達偵測器,此時記錄波形呈現較小的 a 值;並且在高 流速時有較大的分散現象,使得質量中心通過偵測器後,其空間波形 擴張程度大於波形移動的距離,導致偵測器測到樣品訊號的時間延 長,此時記錄波形呈現較大的 b 值,兩者相除就得到較大的不對稱因 子。. (e) 經驗分散係數 (D*) 由公式 4.5 與 4.6 藉由反覆帶入法可以從時圖中的波形指標參數來 計算經驗分散係數,要注意的是,本係數僅代表在該偵測位置下,整 個系統的平均分散係數。從圖 22(e)中可看到,低流速的分散係數大 致上隨管路增長而稍微減小;中流速的分散係數則不隨管路長度而 變;在中高至高流速時,分散係數隨管路長度而增加。. (f) 其他參數 根據公式 2.9,波高 (h*) 與管路長度開根號成反比,由圖 22(f) 來 看符合此趨勢。. 4.4.3 綜合分析. (a) 不對稱因子 (Af) 在低至中流速之間,從管路前端到後端的空圖不對稱因子都接近 於 1,這說明樣品在此流速條件下皆以對稱分佈的形式在管路中移. 52.
(66) 動,反觀時圖,不同管路位置的時圖波形都呈現拖尾,尤其是越高流 速時以及管路位置越前端的波形越不對稱。在高流速的實驗中,隨流 析時間增長而空圖不對稱因子降到 0.7 左右,但是時圖依然呈現拖 尾,這顯示樣品在管內的空間分佈,與傳統偵測器隨時間記錄的波形 有明顯地差異,這種差異稱之為空時差異(於 1.4 節提及)。此結果符 合 Pai 的理論,產生差異的原因是由於樣品在管內的空間分佈狀態隨 時間一直在改變,即樣品不斷在管內擴張,而傳統偵測器只能在固定 的偵測位置隨時間收集訊號,因此收集到的訊號其實是樣品在管內不 斷變化累積的結果,造成空時差異的原因稱之為時間效應 (temporal. effect)。所以影響記錄波形產生拖尾的原因,時間效應佔很大的比例。 (b) 空時疊圖 若要進一步比較空時差異,可以將空圖波形與時圖波形重疊。圖. 23(a) 是流量 1.002 mL/min 的 4 號波形疊圖,圖 23(b) 是流量 3.996 mL/min 的 2 號波形疊圖,從疊圖可看到兩波形會交於三點,與圖 7 的理論波形大致吻合,並且在較高流速下,可以清楚的看到空圖與時 圖的差異。. (c) 分散係數 (D) 由時圖可以計算得到的經驗分散係數 (D*),根據理論此值是整個 系統的平均分散係數,而由空圖可以計算得到的空間分散係數. 53.
(67) (D’) ,理論上這兩個值都是指同一個分散係數(D),但在低至中流速 之間,兩分散係數其平均值的誤差約在- 5.3% ~ 4.0%之間,此誤差推 測是由於空間波形不是很完美的對稱分佈,因此利用公式 4.8 得到 的空間分散係數有微小誤差,這證明經驗分散係數的計算方式是可信 的,所以我們可以利用公式 4.5 與 4.6 藉由反覆帶入法得到經驗分散 係數 (D*),此值可說是樣品在管內的平均分散係數。. 54.
(68) y. y5 y6. y4. y3. y7. y2. y8. y1 x1 x2 x3 x4. y9 x5. x6. x7 x8 x9. x. 圖 15 積分法求波形面積的示意圖 計算波形下涵蓋的面積,將 (xn, yn) 與 (xn+1, yn+1) 所涵蓋的梯形 面積算出,再將梯形面積累加即可逼近波形面積,若 xn 與 xn+1 間 隔差距越小,則由累加得到的面積越接近真實面積。. 55.
(69) h. 0.1h. a. b tp*. 圖 16 不對稱因子的定義 以十分之一的波高位置作水平線,交於波形左半部,其交與波峰 位置的距離為 a;交於波形右半部,其交點與波峰位置的距離為 b, 不對稱因子即 Af = b / a。. 56.
(70) (a) Abs.. y5 y6. y4 y3. y7. y2. y8. y1. y9. x1 x2 x3 x4 x5 x6 x7 x8 x9. Length. (b) Abs.. y1 y3 y2. x1 x3. x2. Length. 圖 17 空間波形的質心位置. (a) 質心位置的定義:空間波形一半面積所在的位置,由圖可知 (x1, y1)到(x5, y5)的面積佔全部面積((x1, y1)到(x9, y9))的一半,因此 x5 即為質心位置(Lm’),y5 為質心波高 (hm’)。. (b) 內插法計算質心位置:(x1, y1)與(x2, y2)分別為兩偵測位置及記 錄的吸收值,(x3, y3)為內插法計算得到的質心位置與質心波高。 57.
(71) (a). (b). h2. h1. L1. hm’. Abs.. Abs.. hm’. h2. L. Lm’ L2. L2’ Lm’. h1. L1’. L’. (c) Abs.. hm’ h2. t2’. h1. tm*. t1’ t. 圖 18 轉軸示意圖. (a) 為原始空圖,位置 L2 與質心 Lm’ 的距離為 L2 – Lm’,經過鏡 像後(圖(b))的新位置為 L2’,與質心的距離和鏡像前一樣,所以 L2’ =. Lm’– (L2 –Lm’),再除上流速 u 即可得到時圖(圖(c))。. 58.
(72) (a) 1.6 1.4 1.2. Abs .. 1 0.8 0.6 0.4 0.2 0 -0.2 0. 200. 400 Le ngth (c m). 600. 800. 200. 400 Le ngth (c m). 600. 800. 200. 400 Le ngth (c m). 600. 800. (b) 1.4 1.2 1. Abs .. 0.8 0.6 0.4 0.2 0 -0.2 0. (c) 1.2 1. Abs .. 0.8 0.6 0.4 0.2 0 -0.2. 0. 圖 19 不同流量的空圖 不同流量的空圖 (a) 0.480 mL/min;(b) 1.002 mL/min;(c) 2.016. mL/min 59.
(73) (d) 1 0.8. Abs .. 0.6 0.4 0.2 0 -0.2. 0. 200. 400. 600. 800. 600. 800. Le ngth (c m). (e) 1 0.8. Abs .. 0.6 0.4 0.2 0 -0.2. 0. 200. 400 Le ngth (c m). 圖 19 不同流量的空圖(續) 不同流量的空圖 (d) 3.996 mL/min;(e) 8.046 mL/min。每一張空 圖內從左到右有 5 個波形,分別代表在該流量下,由多通道偵測器在 不同流析時間取得樣品在管內的空間分佈波形。. 60.
(74) (a) 145. 140. 140. AL ' (Abs-cm). AL ' (Abs-cm). 145. 135. 135. 130. 130 125 120 150. 125. 250. L m ' (cm). 350. 120 150. 450. 250. L m ' (cm). 350. 450. 350. 450. 350. 450. (b) 1.5. 1.3. 1.3. 1.1. 1.1. Af. Af. 1.5. 0.9. 0.9. 0.7. 0.7. 0.5 150. 250. L m ' (cm). 350. 0.5 150. 450. 250. L m ' (cm). 25. 250. 20. 200 D' (cm2/s). D' (cm2/s). (c). 15 10. 100 50. 5 0 150. 150. 250. L m ' (cm). 350. 0 150. 450. 250. L m ' (cm). 圖 20 空圖波形指標參數關係圖 圖上符號 ◆, ■, △, ×, ○ 分別代表流量 0.480、1.002、2.016、. 3.996、8.046 mL/min。(a)空圖波形面積對質心位置;(b)不對稱因子 對質心位置;(c)空間分散係數對質心位置。. 61.
(75) (d) 150. D' (cm2/s). 110 70 30 -10 0. 5 Q (mL/min). 10. 15 20 L 1/2 (cm1/2). 25. 15 20 L 1/2 (cm1/2 ). 25. (e) 120. σL (cm). 100 80 60 40 20 0 10. hm ' (Abs). (f) 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 10. 圖 20 空圖波形指標參數關係圖(續). (d)各流量第一個空圖波形,質心位置約在 222 公分,其空間分 散係數對流量;(e)擴張程度對樣品移動距離開根號;(f)質心波高對樣 品移動距離開根號。圖(e)、(f)上符號 ◆, ■, △, ×, ○ 分別代表流量. 0.480、1.002、2.016、3.996、8.046 mL/min。. 62.
(76) (a) 1.8 1.6 1.4 1.2 Abs .. 1 0.8 0.6 0.4 0.2 0 -0.2 0. 200. 400 Time (s ). 600. 800. 100. 200 Time (s ). 300. 400. 50. 100 Time (s ). 150. 200. (b) 1.4 1.2 1. Abs .. 0.8 0.6 0.4 0.2 0 -0.2 0. (c) 1.2 1. Abs .. 0.8 0.6 0.4 0.2 0 -0.2. 0. 圖 21 不同流量的時圖 不同流量的時圖 (a) 0.480 mL/min;(b) 1.002 mL/min;(c) 2.016. mL/min 63.
(77) (d) 1 0.8. Abs .. 0.6 0.4 0.2 0 -0.2. 0. 50. 100. Time (s ). (e) 1 0.8. Abs .. 0.6 0.4 0.2 0 -0.2. 0. 20. 40. 60. Time (s ). 圖 21 不同流量的時圖(續) 不同流量的時圖 (d) 3.996 mL/min;(e) 8.046 mL/min。每一張時 圖內從左到右有 5 個波形,分別代表在該流量下,以多通道偵測器在 不同管路位置隨時間取得的記錄波形。. 64.
(78) tp* (s). (a) 450 400 350 300 250 200 150 100 50 0 0. 200 400 L total (cm). 600. 0. 200 400 L total (cm). 600. (b) 140 120 At*(Abs-s). 100 80 60 40 20 0. (c) 3. 1.7 1.6. 2.5. 1.5 Af. Af. 1.4 1.3 1.2. 2 1.5. 1.1 1. 1 0. 200 400 L total (cm). 0. 600. 200 400 L total (cm). 600. 圖 22 時圖波形指標參數關係圖 圖上符號 ◆, ■, △, ×, ○ 分別代表流量 0.480、1.002、2.016、. 3.996、8.046 mL/min。(a)表觀波峰位置對管路長度;(b)時圖波形面 積對管路長度;(c) 不對稱因子對管路長度。. 65.
(79) (d) 3. Af. 2.5 2 1.5 1 0. 5 Q (mL/min). 10. 30. 250. 25. 200. 20. D* (cm2/s). D* (cm2/s). (e). 15 10. 150 100 50. 5. 0. 0 0. 200 400 L total (cm). 0. 600. 200 400 L total (cm). 600. (f) 2. h* (Abs). 1.5 1 0.5 0 10. 15 20 L total 1/2 (cm1/2). 25. 圖 22 時圖波形指標參數關係圖(續). (d)管路長度 222.6 公分的偵測位置所得時圖,其不對稱因子對流 量。(e)經驗分散係數對管路長度;(f)波高對管路長度。圖(e)、(f)上 符號 ◆, ■, △, ×, ○ 分別代表流量 0.480、1.002、2.016、3.996、8.046. mL/min。. 66.
(80) (a) 1.2. 1. 0.8. Abs .. 0.6. 0.4. 0.2. 0 50. 100. 150. -0.2. 200. 250. 300. 60. 80. 100. Tim e (s e c ). (b) 1. 0.8. Abs .. 0.6. 0.4. 0.2. 0 0 -0.2. 20. 40 Tim e (s e c ). 圖 23 空時疊圖 虛線:空圖;實線:時圖(a) 流量 1.002 mL/min 的 4 號波形疊圖;. (b) 流量 3.996 mL/min 的 2 號波形疊圖. 67.
(81) 表 3 流量 0.480 mL/min 的空圖波形指標參數 流量 Q. 0.0080. mL/sec. 0.480 波形編號. mL/min. 1. 2. 3. 4. 5. 流析時間 t(s) 理論質心 Lm(cm) 質心 Lm’(cm) 質心預測誤差(%). 220.637 217.7 219.8 -0.9. 266.042 262.5 264.1 -0.6. 314.712 310.5 312.0 -0.5. 363.382 358.6 359.8 -0.3. 415.297 409.8 410.6 -0.2. 質心波高 hm’(Abs) 面積 AL’ (Abs-cm). 1.496 126.8 2.1 0.975 33.8. 1.452 128.9 1.9 1.088 32.2. 1.356 129.1 1.9 1.134 35.0. 1.305 129.7 1.9 1.054 36.8. 1.266 130.1 1.8 1.012 38.2. 參數(單位). D’ (cm2/s) 不對稱因子 Af 擴張程度 σL(cm). 表 4 流量 1.002 mL/min 的空圖波形指標參數 流量 Q. 0.0167. mL/sec. 1.002 波形編號. mL/min. 1. 2. 3. 4. 5. 流析時間 t(s). 108.315. 129.766. 152.749. 175.732. 200.247. 理論質心 Lm(cm) 質心 Lm’(cm) 質心預測誤差(%). 223.1 223.2 0.0. 267.3 266.8 0.2. 314.6 313.6 0.3. 362.0 360.8 0.3. 412.5 411.3 0.3. 質心波高 hm’(Abs) 面積 AL’ (Abs-cm). 1.259 133.0 7.2 1.174 42.1. 1.214 135.0 6.8 1.151 44.4. 1.119 136.0 7.0 1.189 48.5. 1.077 136.3 6.7 1.118 50.5. 1.025 136.6 6.5 0.882 53.1. 參數(單位). D’ (cm2/s) 不對稱因子 Af 擴張程度 σL(cm). 68.
數據



+7

![圖 6 流動注入系統的基本參數 此圖說明一個流動注入分析系統,管路截面積為 a (cm 2 ) ,在注 入閥內有初濃度為 C 0 (mM) 、體積為 V s (mL) 的樣品,受到幫浦以流 量 Q (mL/s) 推動。其總管路體積相當於一半的樣品體積 (V s ) ,加上 管路體積 (V c ) 與一半的偵測器體積 (V d ) 。而樣品質量中心到達偵測 器的時間 t p (s) ,可由總管路體積除上流量求得 [19] 。 Q Q Injector Detector VsVcVd](https://thumb-ap.123doks.com/thumbv2/9libinfo/8113575.165628/35.892.164.765.343.714/流動注系統管幫浦以流量推動其總管路體當於體積與一半可由總管.webp)



相關文件
學校收到有非華語幼兒的在家進 行這個活動的片段分享。學校適 時提供個別支援,從中以多範疇
。以佛印故皆名佛說。入道多途者。至理虛通目之為道。諸經稱四悉。機示其入理之
觀彼世界相勝過三界道 此已下是第四觀察門。此門中分為二別。一者觀察器世
決定隱藏層神經元數,對一層隱藏層觀察神經元數 1~10 個之測試 範例誤差均方根 RMS 最小者,結果取隱藏層觀察神經元數為 10
本研究以大甲鎮瀾宮和三清總道院為對象,採用參與觀察法、歷史文獻分
Hanning Window 可用來緩和輸入訊號兩端之振幅,以便使得訊號呈現 週期函數的形式。Hanning Window
樹、與隨機森林等三種機器學習的分析方法,比較探討模型之預測效果,並獲得以隨機森林
並且利用裂紋感測器兩端支腳張開與閉合時電壓訊號的改變,量測梁 的上下端所承受的彎矩應變。此外運用應變規與 LVDT
