國
立
交
通
大
學
電控工程研究所
碩 士 論 文
應用積分順滑模控制技術於二次多項式系統穩健輸出
追蹤之研究
Study of Robust Output Tracking for a Class of 2nd-Order
Polynomial Systems via ISMC Technique
研 究 生:徐君豪
指導教授:梁耀文 博士
應用積分順滑模控制技術於二次多項式系統穩健輸出追蹤
之研究
Study of Robust Output Tracking for a Class of 2nd-Order
Polynomial Systems via ISMC Technique
研 究 生:徐君豪 Student:Chun-Hao Hsu
指導教授:梁耀文 博士 Advisor:Dr. Yew-Wen Liang
國立交通大學電控工程研究所
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering
College of Electrical Engineering and Computer Science
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
July 2011
Hsinchu, Taiwan, Republic of China
應用積分順滑模控制技術於二次多項式系統穩健輸出
追蹤之研究
研究生:徐君豪
指導教授:梁耀文 博士
國立交通大學電控工程研究所
摘要
本論文探討單輸入單輸出之二次多項式系統之穩健輸出追蹤及
內部狀態穩定化議題。為了利用積分順滑模控制理論於非線性非仿射
系統,本論文定義了二次多項式系統的匹配式(matched type)與非匹
配式(unmatched type)的不確定因素(uncertainties),並提出使二次多
項式系統達到輸出追蹤及內部狀態的控制律。所獲得的結果也應用於
變壓器控制之電力系統的電壓調節研究。模擬結果驗證了所設計穩健
控制律之有效性。
Study of Robust Output Tracking for a Class of 2nd-Order
Polynomial Systems via ISMC Technique
Student:Chun-Hao Hsu Advisor : Dr. Yew-Wen Liang
Institute of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
This thesis investigates the issues of robust output tracking and
internal state stabilization for a class of SISO uncertain second-order
polynomial system. In order to design control law for second-order
polynomial system using ISMC technique, this thesis define matched
and unmatched uncertainties for second-order polynomial system, and
presents a class of ISMC controller for robust output tracking and internal
state stabilization task. The analytical results are also applied to a
tap-changer control based power system for voltage regulation.
Simulation results demonstrate the use and the benefits of the proposed
scheme.
誌 謝
本篇論文能夠順利完成,實在要感謝很多人關心與協助。首先,要感謝我的 指導教授梁耀文博士,感謝老師細心與耐心的指導以及對我的鼓勵,使我在這兩 年的學習中受益良多,除此之外老師對於日常生活以及做人處事的道理也不吝提 供幫助與提供正確且良好的觀念,對於往後的人生將有很大的助益。也要感謝系 上曾給予協助的老師,同時,也要感謝口試委員廖德誠博士、宋朝宗博士和徐勝 均博士給予指正與寶貴的建議,使本論文更加完備。 接下來要感謝徐勝均學長,魏源廷學長,林立岡學長以及鄭旭志學長在我遇 到困難時能給予適時的幫助與鼓勵,再來要感謝實驗室的同學智強,榮人陪伴了 我兩年研究所生活,在我心情低落的時候能夠協助我,並且在學業及生活上給我 很大的支持與幫助,而學弟妹們,鴻儒,仰靚,鈞鈞也都會適時的給予我一些意 見,感謝你們對於我的幫助,使我的論文研究能夠更加順利。感謝所有我認識的 朋友,有你們的陪伴讓我的研究所生活過得多采多姿且充滿快樂的回憶。 最後要感謝我的家人,爸爸、媽媽與奶奶,不管發生什麼事總是支持我,給 我最大的鼓勵,讓我可以無後顧之憂的在學業上勇往直前,進而完成研究所的學 業,謹將此論文獻給所有我愛的人,謝謝你們!目 錄
中文摘要... i 英文摘要... ii 誌謝... iii 目錄... iv 圖目錄... vi 表目錄... ix 第一章 緒論... 1 1.1 研究背景... 1 1.2 研究動機... 2 1.3 論文架構... 3 第二章 預備知識... 4 2.1 利用 SMC 設計控制律達到二次多項式之穩健輸出追蹤 ... 4 2.2 利用 CLF 設計控制律達到二次多項式之穩健輸出追蹤 ... 7 2.3 電力系統模型... 13 第三章 二次多項式系統之穩健輸出追蹤... 17 3.1 問題描述... 17 3.2 定義二次多項式系統之匹配與非匹配的系統參數不確定項... 20 3.2.1 方程式(3.17)中 的選取形式1 ... 21 3.2.2 的選取形式2 ... 42 3.3 控制律設計... 47 3.3.1 設計針對無干擾系統之 LQR 控制律... 48 3.3.2 設計針對有干擾系統之 ISMC 控制律 ... 49 3.3.2.1 考慮匹配的系統參數不確定因素... 493.3.2.2 考慮非匹配的系統參數不確定因素... 54 第四章 應用於變壓器控制電力系統的電壓調節研究... 61 4.1 系統動態方程式... 62 4.2 控制律設計... 64 4.2.1 系統平衡點分析... 64 4.2.2 穩定點分析... 66 4.2.3 控制律設計... 67 4.2.4 模擬結果... 64 4.2.4.1 系統沒有參數不確定因素與外在干擾( 0) ... 72 4.2.4.2 系統只有匹配的參數不確定因素與外在干擾( ) ... 73 4.2.4.3 系統有非匹配的參數不確定因素與外在干擾( ) ... 74 4.3 控制律比較... 75 4.3.1 SMC 控制律設計 ... 75 4.3.2 CLF 控制律設計 ... 76 4.3.3 LQR 與 ISMC 控制律比較 ... 78 4.3.4 SMC、CLF 與 ISMC 控制律比較 ... 79 第五章 結論與未來研究方向... 99 5.1 結論... 99 5.2 未來研究方向... 100 參考文獻... 101
圖 目 錄
圖2. 1:電力系統模型(a)原始電力系統模型加上變壓器(b)戴維寧等效 ... 14 圖3. 1: 空間中 與 示意圖 ... 21 圖3. 2: S 在 空間中之示意圖 ... 22 圖3. 3: 給定 時, 與 在R 空間中與 S 之關係 ... 23 圖3. 4: ΔP 0之P , P 與P 圖形 ... 25 圖3. 5: ΔP 0且P α 0 有二重根之P , P 與P 圖形 ... 26 圖3. 6: ΔP 0,P α 0 有二重根且P α 0 有三重根之P , P 與P 圖形 .... 27 圖3. 7: ΔP 0, P 1 P 6 0且P 1 0之P , P 與P 圖形 ... 28 圖3. 8: ΔP 0, P 1 P 6 0且P 6 0之P , P 與P 圖形 ... 29 圖3. 9: ΔP 0, P k P k 0且P k 0, P k 0之P , P 與P 圖形 ... 30 圖3. 10: ΔP 0, P k P k 0且P k 0, P k 0之P , P 與P 圖形 .... 31 圖3. 11: ΔP 0, P k P k 0 且d d 之P , P 與P 圖形 ... 32 圖3. 12: ΔP 0, P k P k 0 且d d 之P , P 與P 圖形 ... 32 圖3. 13: ΔP 0, P k P k 0 且d d 之P , P 與P 圖形 ... 33 圖3. 14:給定P α a α a α a α a α a 且a 0,求α ... 36 圖3. 15: S 與S 在R 空間中的幾何意義 ... 44 圖3. 16:給定 時, 與 在R 空間中與S 之關係 ... 45 圖3. 17:滿足 A 0且B 4AC 0之ρ A ρB C圖形 ... 50 圖4. 1: u 為正值,平衡點 與u 對Q 的變化 ... 65 圖4. 2: u 為負值,平衡點 與u 對Q 的變化 ... 65 圖4. 3: (a)左邊三圖代表平衡點為x 控制律為u ,Q 對三個特徵值的影響 ... 67圖4. 4:Q 9,白色區域為誤差狀態e 、e 、e 滿足Ω 的區域,(a) k=0.38 (b) k=10 ... 83
圖4. 5:Q10 10,ΔQ 0,初始電壓為正值,模擬時間 10 秒,(a)Q 值,(b) 狀態x ,(c)狀態x ,(d)狀態x ,(e)狀態x ,(f)狀態e ,(g)狀態e ,(h) 狀態e ,(i)狀態e ,(j)順滑變數 σ , (k) u 值 ... 84 圖4. 6:Q 10,ΔQ 0,初始電壓為負值,模擬時間 10 秒,(a)Q 值,(b)
狀態x ,(c)狀態x ,(d)狀態x ,(e)狀態x ,(f)狀態e ,(g)狀態e ,(h) 狀態e ,(i)狀態e ,(j)順滑變數σ , (k) u 值 ... 85 圖4. 7:Q 9,ΔQ 0.2,只考慮匹配的不確定因素,模擬時間 10 秒,(a)Q 值,
(b) 、 、 的範數,(c)狀態x , (d)狀態x , (e)狀態x , (f)狀態x , (g)狀態e ,(h)狀態e , (i)狀態e , (j)狀態e , (k)順滑變數σ, (l) u 值... 86 圖4. 8:Q 9,ΔQ 為介於 0.2~0.2的隨機訊號, 0 ,0.1,1, 0.1579 , 考慮只有匹配的不確定因素,模擬時間10 秒,(a) 的範數,(b) 的 範數,(c) 的範數 ... 87 圖4. 9:Q 9,ΔQ 為介於 0.2~0.2的隨機訊號,只考慮匹配的不確定因素, 模擬時間10 秒,(a)Q 值,(b)狀態x ,(c)狀態x ,(d)狀態x ,(e)狀態x ,(f) 狀態e ,(g)狀態e ,(h)狀態e ,(i)狀態e ,(j) 順滑變數σ (k) u 值 . 88 圖4. 10: Q 9,ΔQ 0.2sin 5t , 0 ,0.1,0.1579,1 ,考慮只有匹配的
不確定因素,模擬時間10 秒,(a) 的範數,(b) 的範數,(c) 的範 數... 89 圖4. 11:Q 9,ΔQ 0.2sin 5t , 0 ,0.1,0.1579 ,1 ,考慮只有匹配的不
確定因素,模擬時間10 秒,(a)Q 值,(b)狀態x ,(c)狀態x ,(d)狀態x ,(e) 狀態x ,(f)狀態e ,(g)狀態e ,(h)狀態e ,(i)狀態e ,(j)順滑變數σ (k) u 值... 90 圖4. 12:Q 9,ΔQ 0.2,k 0.1,考慮有非匹配的不確定因素,模擬時間
10 秒,(a)Q 值,(b)狀態x ,(c)狀態x ,(d)狀態x ,(e)狀態x ,(f)狀態 e ,(g)狀態e ,(h)狀態e ,(i)狀態e ,(j)順滑變數σ (k) u 值 ... 91
圖4. 13:Q 9,ΔQ 0.2,k 0.38,考慮有非匹配的不確定因素,模擬時 間10 秒,(a)Q 值,(b)狀態x ,(c)狀態x ,(d)狀態x ,(e)狀態x ,(f) 狀態e ,(g)狀態e ,(h)狀態e ,(i)狀態e ,(j)順滑變數σ,(k) u 值 ... 92 圖4. 14:Q 9,ΔQ 0.2sin 5t),初始狀態x 0.4 0.4 0.3 0.8 ,模擬時間 10 秒,誤差狀態比較圖(控制律為 LQR0 與 LQR1) ... 93 圖4. 15:Q 9,ΔQ 0.2sin 5t),初始狀態x 0.4 0.4 0.3 0.8 ,模擬時間 10 秒,誤差狀態比較圖(控制律為 LQR0 與 ISMC) ... 93 圖4. 16:Q 9,ΔQ 0.2sin 5t),初始狀態x 0.4 0.4 0.3 0.8 ,模擬時間 10 秒,u 值比較圖(控制律為 LQR0 與 ISMC) ... 94 圖4. 17: Q 9,ΔQ 0.2,初始狀態x 0.5 0.3 0.3 1.3 ,模擬時 10 秒, 狀態誤差e 時間響應比較圖 ... 95 圖4. 18:Q 9,ΔQ 0.2,初始狀態x 0.5 0.3 0.3 1.3 ,模擬時 10 秒, 狀態誤差e 時間響應比較圖 ... 95 圖4. 19:Q 9,ΔQ 0.2,初始狀態x 0.2 0.5 0.3 1.2 ,模擬時 10 秒, 狀態誤差e 時間響應比較圖 ... 96 圖4. 20:Q 9,ΔQ 0.2,初始狀態x 0.2 0.5 0.3 1.2 ,模擬時 10 秒, 狀態誤差e 時間響應比較圖 ... 96 圖4. 21:Q 9,ΔQ 0.2,初始狀態x 0.2 0.5 0.3 1.2 ,模擬時約 0.2 秒, 順滑變數σ比較圖 ... 97 圖4. 22:Q 9,ΔQ 0.2,初始狀態x 0.2 0.5 0.3 1.2 ,模擬時約 0.15 秒,u 值比較圖... 97 圖4. 23:Q 9,ΔQ 0.2,初始狀態x 0.2 0.5 0.3 1.2 ,模擬時 10 秒,u 值比較圖... 98
表 目 錄
表3. 1: P (α 0之根所對應的α 與 minP (α ... 33 表3. 2:D 所對應的α 與minP α ... 35 表3. 3: 的選取 ... 47 表4. 1: 性能比較表(無外在干擾) ... 81 表4. 2: 性能比較表(有外在干擾) ... 82第一章
緒論
1.1 研究背景
近年來,高次多項式系統已逐漸引起大家的注意,如文獻[1]為針對一個自 由度的磁浮系統(Levitation system),其系統形式為一個單輸入的二次多項式系統 ,在某些條件下利用二階順滑模式控制(sliding mode control)設計控制律,使系統
達到穩定的效果。文獻[2]針對單輸入的多項式系統利用控制李亞普諾夫函數 (Control Lyapunov Function,CLF) 探討使系統穩定的條件及設計對應穩定控制 律,其結果成功應用到穩定[1]中的磁浮系統上。文獻[3]將文獻[2]的結果推廣到 多輸入的二次多項式系統,利用 CLF 找出使系統穩定得條件及對應之穩定的控 制律的建構,並能將使系統穩定的控制律作參數化(parameterize),同時探討片段 連續的穩定控制律之存在條件及設計。此外文獻[2]及[3]都不考慮系統不確定因 素(model uncertainty)及外在干擾(external disturbance) 。
1.2 研究動機
針對單輸入單輸出具有不確定因素之二次多項式系統在非控系統不存在平 衡點的情況下,論文[4]透過順滑模態控制理論設計控制律,使系統達到穩健輸 出追蹤的目的,但不保證內部狀態會穩定且閉迴路系統軌跡在快接近順滑面但未 達順滑面的迫近階段(reaching phase)時,可能對系統不確定因素及外在干擾之影 響而造成閉迴路系統不穩定的現象[5]。 在文獻[6]中,將積分順滑模控制應用於非線性仿射系統,由於積分型順滑 模控制的特殊順滑面選取方式,使閉迴路系統軌跡一開始就在順滑平面上,故避 免順滑模態控制中的迫近階段會造成閉迴路系統不穩定的現象。此外積分順滑模 控制還有許多優點:(1)當閉迴路系統軌跡一直在順滑平面上時,匹配的系統不 確定性及外在干擾會被消除(2)由於順滑模態控制的最大控制力道通常發生於迫 近階段,所以積分順滑模控制的最大力道通常小於順滑模態控制的最大力道(3) 當系統只考慮匹配的系統不確定性及外在干擾時,且系統軌跡一直保持在順滑平 面上時,此時的系統軌跡會與標稱系統(nominal system)在標稱控制(nominal control)下的系統軌跡相同,因次我們在針對標稱系統設計標稱控制律時有更高 的自由度,且保證有干擾系統在控制後能夠有相同的動態響應。 積分順滑模控制有上述的諸多優點,但目前文獻如[5][6],都是利用積分順 滑模控制對非線性仿射系統進行設計控制律,而沒有針對非線性非仿射系統進行 設計的例子,故本論文將利用積分順滑模控制於二次多項式系統,使系統達到穩 健輸出追蹤與內部狀態穩定的目的。 在本論文中,我們也將針對二項式系統輸出追蹤及內部狀態穩定化所獲得的 結果應用到以變壓器控制之電力系統中[7]之電壓調節上,此電力系統原始模型 是由Dobson 和 Chiang[8]所提出,系統模型中包含發電機、無限匯流排與非線性 負載,並且系統會呈現有電壓崩潰的現象 [8]-[11],其電壓崩潰發生於鞍點分歧 處(saddle node bifurcation)附近[8],[12]。發生電壓崩潰現象的原因可歸納於電力系統操作在穩定邊界,負載損耗增加所造成[10],[12]。為了使系統能達到電壓調 節的目的,因此我們在原始系統加入控制點,在原始系統加入一個變壓器(tap changer)[7]。當負載損耗有所變化時,利用調整變壓器來達到電壓保持穩定值, 避免電壓崩潰的發生。對於變壓器用於電力系統的效果,在文獻[13],[14]-[16]有 被討論。
1.3 論文架構
本論文的第二章中,我們簡介論文[4]中利用 SMC 設計的控制律達到二次多 項式之穩健輸出追蹤以及論文[17] 利用 CLF 設計的控制律達到二次多項式之穩 健輸出追蹤,然後介紹 Dobson 和 Chiang[8]所提出的電力系統,在原始系統模 型中加入一個變壓器[7]之後得到的系統模型。在第三章中,為了仿照 ISMC 設 計流程[5][6],對二次多項式系統設計控制律,首先定義出二次多項式系統參數 不確定性的匹配式與非匹配式,然後我們考慮在三種情況下設計ISMC 控制律, 且證明當系統只有匹配的參數不確定因素時,所對應的控制律使得系統維持在順 滑模式時,系統狀態會與標稱系統在標稱控制下的軌跡相同。在第四章中,我們 利用第三章的理論,以電力系統的變壓器為控制輸入點,調整變壓器的匝數比來 達到電壓調節的功能,並且比較利用LQR、SMC、CLF 與 ISMC 設計控制律的 性能表現。最後,第五章提出本論文之結論及未來研究方向。第二章
預備知識
2.1 利用 SMC 設計控制律達到二次多項式之穩健輸出追蹤
考慮一個非線性系統如下 u u t (2. 1) y h (2. 2) 其中 為系統狀態變數,u 為控制輸入,y 為控制輸出及 為模 型的不確定因素或外部雜訊。假設 · 、 · 、 · 及 · 為平滑向量場。因為 動態方程式(2. 18)中有u 項,我們可以得知此動態方程式不是非線性仿射系統 (nonlinear affine system)。在本章中,我們將利用可變結構控制設計出一個控制器 u,使得系統輸出即使在有不確定因素與外部雜訊干擾的情況下,依然可以達到 所要的輸出值y t ,完成y t y t 當t ∞。針對(2. 1)- (2. 2),由論文[4]可以利用可變結構控制設計出一個控制律,使系 統輸出即使在有不確定因素與外部雜訊干擾下,依然可以達到所要的輸出值,完 成y t y t 當t ∞。
我們選定順滑面為 s t y t y t 0 (2. 3) 若系統狀態到達順滑面並且維持在順滑面上,則輸出追蹤就可以達成,因此控制 器必須有到達順滑平面與保持在順滑平面的控制能量。 我們選擇控制器為 u u u (2. 4) 其中u 要使得系統狀態在有限時間到達順滑面,u 要使系統狀態保持在順滑面 中。從(2. 1)-(2. 3)我們可以得到 s h · h · u h · u h · y αu βu γ h · (2. 5) 其中 h為h 的梯度向量,α α h · ,β β h · , γ γ h · y ,並利用下面假設 假設 2. 1 在控制期間α h · 0 假設 2. 2 存在一個非負函數κ , t ,且| h · | κ , t 假設 2. 1 代表系統(2. 1)- (2. 2)的相對階數為 1,並且u 永遠不會消失。除此 之外,我們也藉由假設 2. 2 限制d的上限。 為了保持系統狀態維持在順滑平面,u 是選擇無雜訊存在時滿足s t 0 當| h · | 0,由(2. 5)可得 u β √Δ 2α (2. 6)
其中 Δ β 4αγ (2. 7) 滿足(2. 6)的u 有兩個,在此我們先選取 u β √Δ 2α (2. 8) u 的選取是為了系統狀態在有限時間到達順滑面,系統必須滿足迫近條件 s t s t η|s t | (2. 9) 其中η為正數,我們利用下面假設 假設 2. 3 函數為 ·| | κ , t 正值。並且存在一個正數η,使得在控制期間 W , t ·| | κ , t η 0 (2. 10) 假設 2. 3 意味著(2. 5)拋物線極值的絕對值必須大於不確定因素或外在干擾 的上限值κ , t ,也就是∆ 不會因 d 的大小變動導致∆ 0 在此,我們選取u 為 u √·| |sgn s t (2. 11) 由論文[4],我們知道在滿足假設 2. 3 系統將滿足迫近條件,在有限時間到達順 滑面。由上述的討論我們可以得到控制律為 u √ √ ·| |sgn s t (2. 12) 若我們在(2. 6)式選擇u 為正號,由論文[4]我們可以得到控制律為 u √ √ ·| |sgn s t (2. 13)
因此,我們有下列的結果 定理2. 1 若系統(2. 1)-(2. 2)滿足假設 2. 1、假設 2. 2 及假設 2. 3,控制律選定為 (2. 12)或(2. 13),則系統將可達成輸出追蹤y t y 之性能。
2.2 利用 CLF 設計控制律達到二次多項式之穩健輸出追蹤
考慮一個單輸入單輸出之二次多項式系統如下: u u t (2. 14) y h (2. 15) 其中 代表系統狀態變數,u 為控制輸入, t 為系統中一個會隨 時間改變的參數,假設 t 可寫成 t t t (2. 16) 其中 t 代表我們事先可以預測或是量測的系統參數, t 為系統參數預測或是 量測的不確定因素,此不確定因素來自系統參數的估計誤。假設 · 、 · 、 · 為平滑向量場。(3.1)可表示成 u u t t (2. 17) 因為動態方程式(2. 14)中有u 項,我們可以得知動態方程式不是非線性仿射系統 (nonlinear affine system)。主要的控制目標是設計控制器使系統在有參數不確定因 素的情況下,系統輸出可以達到所要的輸出值y ,即y y ,其中y 為非零的常 數,且內部動態要維持穩定。為了利用CLF(Control Lyapunov Function)設計穩定控制律,我們需要將追蹤 問題變成穩定化問題,做法如下:設計系統(3.4)的穩定控制律為
u u t v (2. 18)
其中u 為預備回授(preliminary feedback)控制律,其目的是決定無干擾系統的平 衡點,使此平衡點包含輸出追蹤及內部動態之資訊,且u 的值會隨 t 的值而 變化;v 的作用為使系統在有干擾下能夠克服干擾使系統狀態收斂到上述之平衡 點。由於上述平衡點包含輸出追蹤及內部動態之資訊,因此若能達成穩定化即可 同時達成輸出追蹤及內部動態穩定之性能。首先我們考慮無干擾系統利用預備回 授控制律u 求平衡點 ,也就是說 的求法是系統(2. 17)不考慮干擾的情況下利 用預備回授控制律使 為 u u 的平衡點且此平衡點 包含y y 。 為了達此目的,我們首先考慮無干擾系統之動態方程式如下: u u t (2. 19) y h (2. 20) 我們要針對(2. 19)與(2. 20)式,解出預備控制律u 及使無干擾系統的平衡點 , 使其平衡點 包含 y y 的資訊,此時系統必須滿足下列(2. 21)與(2. 22)式 u u t (2. 21) h y 0 (2. 22) 我們要解滿足(2. 21)與(2. 22)的解,(2. 21)式中 n 個系統狀態共有 n 個變數,且預 備回授控制律u 有 1 個變數,所以(2. 21)與(2. 22)式共有n 1個方程式與n 1個 變數,假設滿足(2. 21)與(2. 22)的解存在,則我們可以解得滿足輸出追蹤對應的 平衡點 與控制律u 。
為了將輸出追蹤問題轉換成穩定化問題,我們定義狀態誤差為︰ t (2. 23) 當 0時,代表 t ,而 t 則隱含達成y y ,其中 t x x … x T為無干擾系統利用預備回授在y y 下解出之平衡點,可藉由解 (3.8)與(3.9)式所得, t x x … x T為系統狀態。 我們將設計系統(3.4)的穩定控制律,控制律如下 u u t v (2. 24) 其中u 為針對無干擾系統使系統達到輸出追蹤對應解出的預備回授,可由(3.8) 與(3.9)式得到,v為考慮有干擾系統之控制律。 由(2. 14)-(2. 15)與(2. 23)-(2. 24),我們可以將原始系統整理為: , t , t v , t v t (2. 25) 其中 , t t t u t u p d t dt , t = t 2 t u t , t t 根據論文[17]針對(2. 25)式的系統,我們選取李亞普諾夫函數 V 1 2 T (2. 26) 由(2. 25)式與(2. 26)式可得 V av bv c T t (2. 27) 其中a T ,b T ,c T ,且a、b可能在某些區域等於 零。
我們利用下面假設 假設 2. 4 假設存在正定矩陣 P,可使得a 0發生在h x t y 0 假設 2. 5 存在非負函數ρ , t ,使得| T | ρ , t 因為a 0發生在h x t y 0,我們以|h x t y | ε 作為 控制律切換的分界點,其中ε 為很小的值,即以|h x t y | ε 視為a 0 的情形。此之外,b可能在使h x t y 0的某些子區域等於零,我們以 |b| ε 作為控制律切換分界點,其中ε 為很小的值,以|b| ε 視為 b 0的情 形。當a 0,在(2. 27)式,等號右邊v是的二次多項式形式,且一般來說 d 是無 法預測的,考慮V在最差情況下,由(2. 27)式及假設 2. 5 可得 V av bv c ρ , t (2. 28) 定義Δ為(2. 28)式的判別式 Δ b 4a c ρ , t (2. 29) 由於a、b可能在某些區域等於零,我們可分為四個情形討論分別為a 0、 a 0、a 0且b 0、a 0且b 0的情況,設計適當的控制律及對應穩定的條 件。 考慮a 0的情況: 我們利用以下假設並設計控制率 假設 2. 6 當a 0時,Δ在控制期間為正值
假設 2. 7 當a 0,在 h x t y ε 的鄰域存在不變集合(invariant set) 且滿足Δ 0,我們將這個不變集合以Ω 表示。
我們選取控制律v 如下
v b
考慮a 0的情況: 我們利用以下假設並設計控制率 假設 2. 8 當a 0,在 h x t y ε 的鄰域存在不變集合,我們將這個 不變集合以Ω 表示 一般來說 是無法預測的,當Δ為負值,我們選v使得V 0,我們選取 v 如下 v b 2a (2. 31) 一般來說 是無法預測的,當Δ為正值,我們選v使得V 0,我們選取v如下 v b 2a √Δ a sgn a (2. 32) 考慮a 0、b 0的情況: 我們利用以下假設並設計控制律 假設 2. 9 當a 0,在 h x t y ε 區域存在不變集合使狀態不會進入、 a 0、 0造成狀態誤差發散的情形,我們將此不變集合以Ω 表示並且 Ω Ω Ω 、Ω Ω Ω 當a 0,由(2. 28)可以得到 V bv c (2. 33) 當a 0、b 0,由(2. 23)式我們選取控制律v為 v c ρ , t 0.5|b| b (2. 34)
考慮a 0、b 0的情況: 我們利用以下假設並設計控制率 假設 2. 10 當a 0、b 0,控制律選取(2. 35),在此情況下系統狀態誤差會收 斂到原點。 當a 0、b 0,我們選取的控制律v為 v 0 (2. 35) 假設 2. 10 代表當a 0、b 0時,無法透過 v 改變V的正負號,此時若控制律選 取為v 0仍能使落在a、b等於零區域的狀態誤差會收斂到原點,則系統狀態誤 差即可達到收斂到原點的目標。 定理2. 2 在系統(2. 25)滿足假設 2. 4、假設 2. 5,在a 0滿足假設 2. 6、假設 2. 7,控制律選取為(2. 30) ,在a 0滿足假設 2. 8,控制律選取為(2. 31)或(2. 32), a 0、b 0滿足假設 2. 9,控制律選取為(2. 34),在a 0、b 0滿足假設 2. 10, 控制律選取為(2. 35),則在Ω Ω Ω 的區域我們可以達到使狀態誤差收斂到 原點之目的,因此系統將可以達到輸出追蹤與內部狀態穩定的目的。
2.3 電力系統模型
本節中,我們主要是研究Dobson 和 Chiang [8] 的電力系統數學模型。利用 Dobson 和 Chiang 的模型,並且在原始模型中加入一個變壓器(tap changer)[7], 以變壓器的匝數比作為控制器輸入,達到電壓調節的目的。 在電力系統模型中,主要包含了無限匯流排、非線性負載、變壓器、負載平 衡電容與發電機,其模型描述可以分為負載模型與電力系統模型兩大部分,其描 述如下: 負載模型:非線性負載模型的表示是採用於Walve[18],並且在[8]將其化簡,其 非線性模型是描述在感應馬達動態與PQ 負載在並聯情況之下。而馬達與 PQ 負 載所組成的非線性模型,表示如下: P P P K δ K V TV (2. 36) Q Q Q K δ K V K V (2. 37) 在此,P 與Q 分別代表馬達中所消耗的有效功率與無效功率,P 與Q 是表示為 PQ 負載的消耗功率。 電力系統模型:原始模型中加入變壓器的圖形表示於圖 2.1(a)。在模型中,發電 機的動態方程式可利用搖擺方程式(swing equation)獲得,表示如下: Mδ d ω P E VY sin δ δ θ E Y sinθ (2. 38) 在此,M、d 與P 分別表示發電機的慣量、阻尼與機械功率。在模型中,包含 一個負載平衡電容C,來使電壓能提升到標么值為 1.0 的附近。為了方便使用, 我們利用戴維寧等效將C、Y 、E 化簡,其表示如下: E E / 1 C Y 2CY cosθ / Y Y 1 C Y 2CY cosθ / θ θ arctan CYCY
明顯地,利用戴維寧等效結果E Y 與E Y 是相同的,其等效圖形表示於圖 2.1(b)。 (a) (b) 圖 2.1:電力系統模型(a)原始電力系統模型加上變壓器(b)戴維寧等效 計算其網路中所消耗功率,在網路中無效功率損耗與有效功率損耗可以表示 如下: P δ , δ, V E Y Vsin δ θ 1 nE Y Vsin δ δ θ Y sinθ Y sinθ V (2. 39) Q δ , δ, V E Y Vcos δ θ 1 nE Y Vcos δ δ θ Y cosθ Y cosθ V (2. 40)
由(2. 36)-(2. 38)以及(2. 39)-(2. 40),我們可以得到電力系統的動態方程式如下: δ ω (2.41) Mω d ω P 1 nE Y Vsin δ δ θ E Y sinθ (2.42) K δ K V K V Q δ , δ, V Q Q (2.43) K K V K K V K K K K V K P δ , δ, V P P K Q δ , δ, V Q Q (2.44) 我們的系統參數是採用於[8],其參數值如下: 負載參數 K 0.4,K 0.3,K 0.03,K 2.8,K 2.1,T 8.5,P 0.6, Q 1.3,P 0 網路與發電機參數
Y 20.0,θ 5.0,E 1.0,C 12.0,Y 8.0,θ 12.0,E 2.5, Y 5.0,θ 5.0,E 1.0,P 1.0,d 0.05,M 0.3
全部的參數以標么值(per unit value)為單位,其角度以度數表示。
我們令x δ ,x ω,x δ,x V,u ,由(2. 41)-(2. 44),我們可 將動態方程式表示為
x x x 1.8807 0.1667x 16.6667x sin 0.0873 x x u x 43.333 93.333x 334.1297x 666.6667x cos 0.0873 x 33.3333Q 166.6667x cos 0.0873 x x u 166.0.325x u d (2. 45) (2. 46) (2. 47) x 7.0327 14.5229x 53.0961x 104.5752x cos 0.0873 x 7.8431x sin 0.0873 x 5.2288Q 26.1438x cos 0.0873 x x 1.9608x sin 0.0873 x u 26.2152x u d (2. 48) 其中 0,0, d , d T代表系統可能具有的不確定因素或外在干擾。有兩種類型 的 在文獻[8], [19]中提到,其中一種起因於負載的變動,也就是Q 隨著電力的需 求所產生的變動;另一種則來自於動態感應馬達模型的參數。
第三章
二次多項式系統之穩健輸出追蹤
3.1 問題描述
考慮一個單輸入單輸出之二次多項式系統如下: u u t (3.1) y h (3.2) 其中 代表系統狀態變數,u 為控制輸入, t 為系統中一個會隨 時間改變的參數,假設 t 可寫成 t t t (3.3) 其中 t 代表我們事先可以預測或是量測的系統參數, t 為系統參數預測或是 量測的不確定因素,此不確定因素來自系統參數的估計誤。假設 · 、 · 、 · 為平滑向量場。(3.1)可表示成 u u t t (3.4) 因為動態方程式(3.1)中有u 項,我們可以得知動態方程式不是非線性仿射系統 (nonlinear affine system)。主要的控制目標是設計控制器使系統在有參數不確定因 素的情況下,系統輸出可以達到所要的輸出值y ,即y y ,其中y 為非零的常數,且內部動態要維持穩定。
為了利用ISMC 設計穩定控制律,我們需要將追蹤問題變成穩定化問題,做 法如下:設計系統(3.4)的穩定控制律為
u u t v (3.5) 其中u 為預備回授(preliminary feedback)控制律,其目的是決定無干擾系統的平 衡點,使此平衡點包含輸出追蹤及內部動態之資訊,且u 的值會隨 t 的值而 變化;v 的作用為使系統在有干擾下能夠克服干擾使系統狀態收斂到上述之平衡 點。由於上述平衡點包含輸出追蹤及內部動態之資訊,因此若能達成穩定化即可 同時達成輸出追蹤及內部動態穩定之性能。首先我們考慮無干擾系統利用預備回 授控制律u 求平衡點 ,也就是說 的求法是系統(3.4)不考慮干擾的情況下利用 預備回授控制律使 為 u u 的平衡點且此平衡點包 含y y 。 為了達此目的,我們首先考慮無干擾系統之動態方程式如下: u u t (3.6) y h (3.7) 我們要針對(3.6)與(3.7)式,解出預備控制律u 及使無干擾系統的平衡點 ,使其 平衡點 包含 y y 的資訊,此時系統必須滿足下列(3.8)與(3.9)式 u u t (3.8) h y 0 (3.9) 我們要解滿足(3.8)與(3.9)的解,(3.8)式中n個系統狀態共有n個變數,且預備回授 控制律u 有 1 個變數,所以(3.8)與(3.9)式共有n 1個方程式與n 1個變數,假 設滿足(3.8)與(3.9)的解存在,則我們可以解得滿足輸出追蹤對應的平衡點 與控 制律u 。
為了將輸出追蹤問題轉換成穩定化問題,我們定義狀態誤差為︰ t (3.10) 當 0時,代表 t ,而 t 則隱含達成y y ,其中 t x x … x T為無干擾系統利用預備回授在y y 下解出之平衡點,可藉由解 (3.8)與(3.9)式所得, t x x … x T為系統狀態。 我們將設計系統(3.4)的穩定控制律,控制律如下 u u t v (3.11) 其中u 為針對無干擾系統使系統達到輸出追蹤對應解出的預備回授,可由(3.8) 與(3.9)式得到,v為考慮有干擾系統之控制律。 由(3.1)-(3.2)與(3.11)-(3.10),我們可以將原始系統整理為: , t , t v , t v (3.12) 其中 , t t t u t u p d t dt , t = t 2 t u t , t t 此時問題由對系統(3.1)之追蹤問題變成系統(3.12)之穩定化問題。此外,系統(3.12) 若不考慮干擾,我們稱為標稱系統(nominal system)如下 , t , t u , t u (3.13) 其中u 為標稱控制(nominal control)。
由於積分型順滑模控制(Integral-Type Sliding Mode Control)有許多優點,如 反應速度快、穩健性(robustness)及容易實現,所以我們採用積分型順滑模控制來 對系統(3.12)設計控制律。我們仿照 ISMC 的設計流程[5][6]進行設計二次多項式
系統的控制律,在系統(3.12)中控制律 v 主要分為兩個部分 v u u (3.14) 其中u 為標稱控制,即針對系統(3.13)的穩定控制律。且標稱控制選擇根據工程 師的需求,而採用最佳化控制(optimal control)設計u ,為了展示起見在這裡我們 u 是使用 LQR 控制律。而u 為一非連續的控制律;u 負責抵消干擾使系統保持 在順滑面上。 為了要仿照ISMC 的設計流程[5][6],對二次多項式系統設計控制律,我們 首先必須定義二次多項式系統參數不確定性的匹配式(matched-type)與非匹配式 (unmatched-type),接下來利用積分順滑控制設計出控制器,使得系統在有匹配式 的參數不確定因素下,狀態軌跡會與無干擾系統一樣,並討論非匹配式的參數不 確定因素對系統的效應。
3.2 定義二次多項式系統之匹配與非匹配的系統參數不確定項
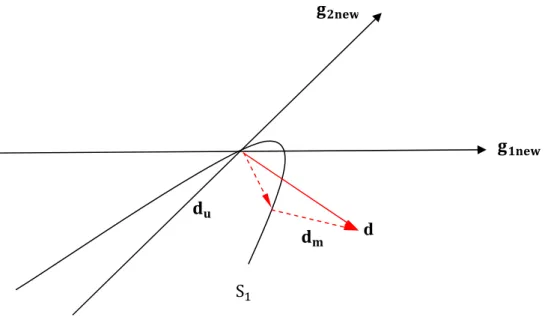
為了定義二次多項式系統之匹配與非匹配的系統參數不確定項,我們先回顧 非線性仿射系統中匹配式與非匹配式的概念。 考慮單輸入單輸出之仿射系統如下: u (3.15) 其中 代表系統狀態變數,u 為控制輸入, · 為平滑向量場。 為系統參數的不確定因素,將 表示如下 (3.16) 其中 col(g),故 為匹配的系統參數的不確定因素, col ,將 投影到 g 的行空間取為 , 投影到 的行空間取為 ,即 , 以上為非線性仿射系統匹配與非匹配的系統參數不確定因素定義。 以幾何意義來說,在 空間中 與 如圖3. 1 所示 圖3. 1: 空間中 與 示意圖 但是,目前文獻中並無定義非線性非仿射式系統中匹配的與非匹配的系統參數不 確定因素,故我們仿照非線性仿射式系統中匹配式與非匹配式的概念,自行定義 二次多項式系統參數的不確定因素中的匹配式與非匹配式。 考慮單輸入單輸出之二次多項式系統(3.12),可將 分為兩部分 (3.17) 其中 將代表匹配的系統參數不確定因素, 代表非匹配的系統參數不確定因 素,接下來我們討論 的選取形式。
3.2.1 方程式(3.17)中
的選取形式 1
在仿射系統(3.15)中 col(g),且 在此取法下 有最小值, 我們仿照仿射系統中匹配的系統參數不確定因素的選取方式,取 S ,其中 col col(g)S α α |α (3.18) 且 的選取為使得 有最小值,即 有最小值 S 的幾何意義為 空間中的一條過原點的一維流形(manifold),實際上 S 如圖 3. 2 所示為一維的拋物線。 圖3. 2: S 在 空間中之示意圖 接下來我們必須決定如何選定α,使得 有最小值,其中 S。 因為根據文獻[6]我們知道在順滑模態上,匹配的系統參數不確定因素會因 非連續控制律的的控制下而被完全消除,所以只需考慮非匹配的系統參數不確定 因素所造成的效應,且希望造成的效應希望能越小越好。如圖3. 3 所示,當給定 d,我們想要試著找到 S,使得 最小,意即找到α,使得 α α 最小,我們定義α 如下 α arg min α α S
我們可得 如下 α α (3.19) 圖3. 3: 給定 時, 與 在R 空間中與 S 之關係 在選定 α α 之後,我們必須驗證α 的存在性。 引理 3. 1(存在性):當給定 、 及 時,P α min α α 必存在,意即α 存在且 α α 存在。 證明: 當給定 、 及 時,假設多項式P α 如下 P α α α α α T α α a α a α a α a α a (3.20) S d
其中 a a 2 a d a 2 a (3.20)中P α 為連續函數且 a 0,且P ∞ , 當 α ∞ ∞ , 當 α ∞,根據極值定理 (extreme value theorem ),P α 存在全域極小值,即α 必存在。
值得一提的是,在引理 3. 1 中α 存在,但一般來說α 不保證唯一。 引理 3. 2(求四次多項式之最小值):考慮多項式Q x c x c x c x c x c ,且c 0,我們可以由c , c , c , c , c 求出 argmin Q x ,以及 min Q x 證明:取P α P α 如下所示 P 4a α 3a α 2a α a (3.21) 取P α P α 如下所示 P 12a α 6a α 2a (3.22) P α 的極小值發生於P α 0的根處,所以我們要解出P α 0的根。三 次多項式P α 0有三個根,但我們無法知道P α 的極小值發生於P α 0的 哪 一 個 根 , 我 們 希 望 當 給 定P α 時 , 可 以 判 斷 出 P α 的 極 小 值 所 對 應 P α 0 的根, 於 是 進 行 以 下 分 析 。 取 A=12 a , B=6 a , C= 2a , 注 意 P 的二次項係數12a 0,且其判別式如下 ΔP B 4AC (3.23) 接下來我們由ΔP 的正負號來分析P 的極小值所發生的位置。
情況 1:ΔP 0 (當P α 0有共軛複數根): 假設P α 0 有共軛複根 x yi,y 0,則P α α x yi α x yi α x y ,P α 0 ,因此可得P 為開口向上之拋物線且與 α 軸無交點。P 可由P 對α積分可得,其中P 為絕對遞增且 P ∞ ,當 α ∞ P ∞ ,當 α ∞ 則P 與 α 軸交於一點,故P 只有一個實數零點 r,另外兩個為複數零點p qi。例 如:考慮P α 0 有共軛複根 1 √2i,如圖 3. 4 所示,很明顯看出P 只有一實 數零點r,且在此零點處P 有極小值。由以上推論可得P (r)為P 的全域極小值且 α r。 圖3. 4: ΔP 0之P , P 與P 圖形
情況 2:ΔP 0 (當P α 0有二重根): 假設P α 0 有二重根 z,則P α α z ,可得P 為開口向上之拋物線且與 α 軸有一個交點。P 可由P 對α積分可得,其中P 為絕對遞增且 P ∞ ,當 α ∞ P ∞ ,當 α ∞ ,則P 與 α 軸交於一點,故P 只有一個實數零點,另外 兩個為複數零點。例如:考慮P α 0 有二重根在 α 1,如圖 3. 5 所示,很明 顯看出P 只有一實數零點 r,且在此零點處P 有極小值。由以上推論可得P (r)為P 的全域極小值;考慮P α 0 有二重根r r 1,如圖 3. 6 所示,P 與α軸相 切,根據勘根定理,P 0在α r 有 3 重根,明顯的P (r )為P 的全域極小值且 α r 。 圖3. 5: ΔP 0且P α 0 有二重根之P , P 與P 圖形
圖3. 6: ΔP 0,P α 0 有二重根且P α 0 有三重根之P , P 與P 圖形 情況 3:ΔP 0 (當P α 0有相異實根):我們將分為三種情況討論 情況 3.1:P k P k 0,其中k 、k 為P 的零點,且k k 若P k 0,即P 在k 與α軸相切,根據勘根定理可知,P α 0在k 有二重 根 , 故 P α α k α k 。 且 P α P α 3α 2 2k k α k 2k k ,檢查ΔP 是否大於零,ΔP =4 k k 0。例如:取k 1, k 6, 如圖3. 7 所示,P α 在α 1處有兩個相同實數零點,α 6處有一個實數零點, 且P α 的全域極小值發生於α 6。由以上推論可知,P (k )為P 的全域極小值。
圖3. 7: ΔP 0, P 1 P 6 0且P 1 0之P , P 與P 圖形 若P k 0,即P 在k 與α軸相切,根據勘根定理可知,P α 0在k 有二重 根,故P α α k α k 。且P α P α 3α 2 2k k α k 2k k ,檢查ΔP 是否大於零,ΔP =4 k k 0。例如:取k 1, k 6, 如圖3. 8 所示,P α 在α 6處有兩個相同實數零點,α 1處有一個實數零點, 且P α 的全域極小值發生於α 1。由以上推論可知,P (k )為P 的全域極小值
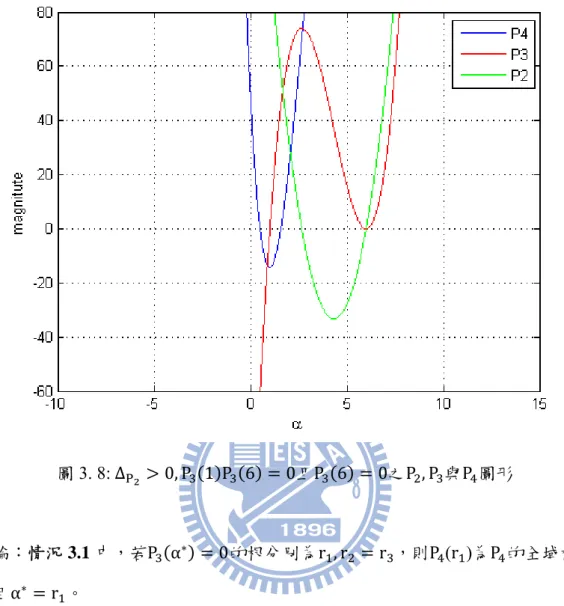
圖3. 8: ΔP 0, P 1 P 6 0且P 6 0之P , P 與P 圖形
結論:情況 3.1 中,若P α 0的根分別為r , r r ,則P (r )為P 的全域極小 值且α r 。
情況 3.2:P k P k 0,其中k 、k 為P 的零點,且k k 考慮P k 0 且P k 0,如圖 3. 9 所示,P 與 α 軸交於一點,故P 只有一 個實數零點r,且此零點處P 有最小值,故P r 為P 的全域最小值。 圖3. 9: ΔP 0, P k P k 0且P k 0, P k 0之P , P 與P 圖形 考慮P k 0 且P k 0,如圖 3. 10 所示,P 與 α 軸交於一點,故P 只有一 個實數零點r,且此零點處P 有最小值,故P r 為P 的全域最小值且α r。
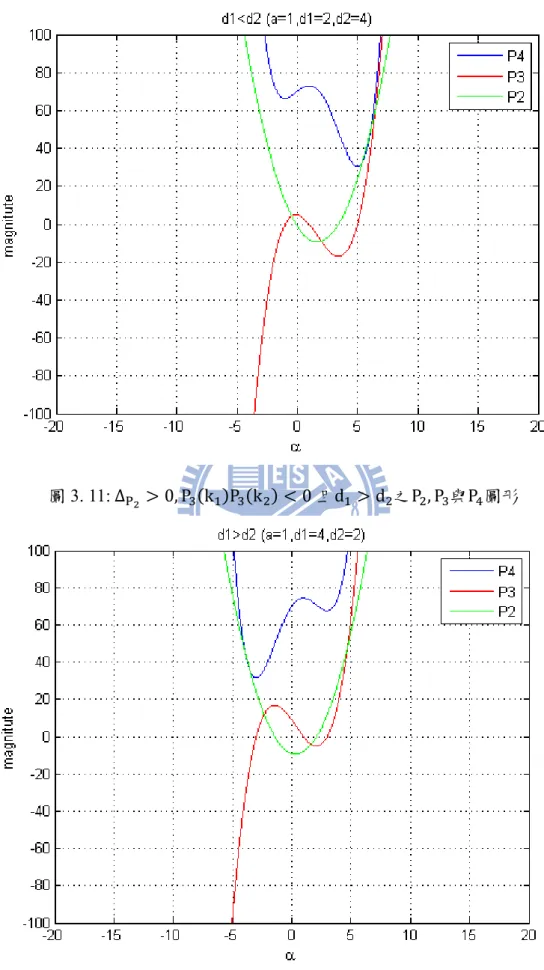
圖3. 10: ΔP 0, P k P k 0且P k 0, P k 0之P , P 與P 圖形 情況 3.3:P k P k 0 考慮P 0 的根分別為r , r 及r ,其中r r r ,且令d r r ,d r r 假設P (α α a d α a α a d ,當d d ,如圖 3. 11 所示, P (α 的全域最小值為P (r 且α r ;當 d d ,如圖 3. 12 所示,P (α 的全 域最小值為P (r 且α r ;當 d d ,如圖 3. 13 所示,P (α 的全域最小值 為P (r 或P (r ,其中P (r P (r 且α r r 。
圖3. 11: ΔP 0, P k P k 0 且d d 之P , P 與P 圖形
圖3. 13: ΔP 0, P k P k 0 且d d 之P , P 與P 圖形 由情況 1~情況 3 分析可得P (α =0 之根所對應P (α 之極小值的整理如下 表3. 1: P (α 0之根所對應的α 與 minP (α P (α 0之根 α minP (α 一個實根和兩個共軛複根 r, p qi r P (r 三個實根,且至少有二重根 r , r r or r r r r P (r 三個相異實根 r r r 且 r r )< r r ) r P (r 三個相異實根 r r r 且 r r )> r r ) r P (r 三個相異實根 r r r 且 r r )= r r ) r r P (r P (r
接下來我們要得到表3. 1 中P (α 0之根的分類依據,且求出P (α 0之 所有根。當給定 、 及 d,我們可以得到P (α)如(3.20)所示且P (α 如(3.21) 所示,將P (α 0改寫如下 α b α b α b 0 (3.24) 取
Q
,R
S R Q R ,T R Q R 則P (α 0的三個根如下所示 x S T 1 3b x 1 2 S T 1 3b 1 2i√3 S T x 1 2 S T 1 3b 1 2i√3 S T (3.25) 根據[20]可知,當b ,b ,b 為實數,若判別式為 D Q R (3.26) 則 (i)若D 0,則有一個實根,二個共軛複根 (ii)若D 0,則所有根皆為實根,且至少有二個實根 (iii) 若D 0,則所有根皆為實根且相異 綜合以上三點及表3. 1 之結果整理如下表3. 2:D 所對應的α 與minP α D ((3.26) 式) P (α 0之根 α minP (α D 0 (3.25)的三根為:一個實根 r 和兩個共軛複根 p qi r P (r D 0 (3.25)的三根為r , r , r 三個實根,且至少有 二重根即r , r r 或r r r r P (r D 0 (3.25)的三根為三個相異實根 r r r 且假設 r r )< r r ) r P (r (3.25)的三根為三個相異實根 r r r 且假設 r r ) r r ) r P (r (3.25)的三根為三個相異實根 r r r 且假設 r r ) r r ) r r P (r = P (r 給定P α a α a α a α a α a 且a 0,求α 之流程圖如圖 3. 14
圖3. 14:給定P α a α a α a α a α a 且a 0,求α b ,b ,b
Q
,R
S R Q R , T R Q R D Q R (3.25)的三根為三個相異 實根 r r r (3.25)的三根為: r , r , r 三個實 根,且至少有二 重根即r , r r α r (3.25)的三根為: 一個實根r 和兩個 共軛複根p qi α r D =0 D > 0 D < 0 r r )> r r ) r r )= r r ) r r )< r r ) α r α r r α r所以當給定 、 及 ,我們得到(3.20)式,然後我們可由圖 3. 14 得 到α 。接下來我們必須檢查選取的α 代入 α α ,是否會使得 ,若以上不等式成立,則相當於原參數不確定因素所造成的效應 被放大,不滿足我們的需求,所以必須要保證非匹配的系統參數不確定因素的範 數不會比系統參數不確定因素的範數大。 引理 3. 3:考慮系統(3.12),當給定 ,若我們可找到α ,使得 α argmin α α ,根據(3.19)式可得 α α ,則 與 滿足以下不等式 證明: 定義 α = α α 則 0 α 所以由以上證明可確定原參數不確定因素所造成的效應不會被放大,最後我們要 檢查d 是否滿足 ISMC 設計需求。 在第二章中的積分順滑模控制器之設計中,我們考慮仿射系統(3.15)且只有 匹配的系統不確定性,此時系統為 u (3.27) 當系統維持順滑模式時,所對應的控制律會使得系統(3.27)的狀態軌跡與標稱系 統在標稱控制下的狀態軌跡相同。現在我們要驗證在二次多項式系統中只有匹配 的系統不確定性下,且d 為形式 1 時在 ISMC 的設計下是否能與應用在非仿射 系統下有相同的效果。意即當系統(3.12)只有匹配的系統不確定性,且存在對應 的控制律使得系統維持順滑模式時,系統狀態軌跡會與標稱系統在標稱控制下的
狀態軌跡相同。 考慮Q 為定值,則標稱系統(3.13)如下 u u (3.28) 系統(3.12)只考慮匹配的系統參數不確定性時系統如下 v v (3.29) 其中 不為零,順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.30) 其中 我們對(3.30)微分,可以得到 σ t u u v u v u (3.31) 將(3.19)代入(3.31)可得 σ v u α v u α (3.32) 假設存在v 使得順滑函數保持為σ 0,即σTσ 0成立,接著,我們欲求系統在 順滑模式時對應的控制律v 。當系統處於順滑模式下時,σ σ 0,我們可得 v α u 1 D D v α u (3.33) 將(3.33)與(3.19)代入系統(3.29)可得 e v α α u D D u α u D D D (3.34)
我們希望控制律v 會使得(3.29)的系統軌跡與標稱系統在標稱控制下的軌跡相 同,意即(3.34)與(3.28)相同,條件為 ,意即 k (3.35) 其中k ,當(3.35)條件成立時,存在使得控制律v 使得系統(3.29)系統軌跡與 標稱系統在標稱控制下的軌跡相同,但(3.35)的條件過於嚴格,當 與 線 性獨立時,d 在形式 1 之下在系統(3.12)只有匹配的系統不確定性,且存在對應 的控制律使得系統維持順滑模式時,系統狀態軌跡不會與標稱系統在標稱控制下 的狀態軌跡相同。我們以下將考慮不滿足(3.35)的情況,討論是否可透過 的選 取能使得d 在形式 1 之下在系統(3.12)只有匹配的系統不確定性,且存在對應的 控制律使得系統維持順滑模式時,系統狀態軌跡會與標稱系統在標稱控制下的狀 態軌跡相同。 以下考慮在 與 為線性獨立之下,兩種 的選取方式 情況 1: 且 此時順滑平面(3.30)的微分為 σ v u α (3.36) 假設存在v 使得順滑函數保持為σ 0,即σTσ 0成立,接著,我們欲求系統在 順滑模式時對應的控制律v 。當系統處於順滑模式下時,σ σ 0,我們可得 v u α (3.37) (3.40)與(3.19)代入系統(3.29)可得 u α α u α α u u 2u α 2α (3.38) 我們希望控制律v 會使得(3.29)的系統軌跡與標稱系統在標稱控制下的軌跡相 同,意即(3.41)與(3.28)相同。發生條件為 2u α 2α 0,即α 0或α u 。 因為我們考慮d 0,所以α 0不合﹔而u 的值會隨系統狀態而變動,α u
中只有匹配的系統不確定性下,所對應的控制律使得系統維持順滑模式時,系統 軌跡不會與標稱系統在標稱控制下的軌跡相同。 情況 2: 且 考慮系統(3.29),其中 不為零,順滑平面選取如(3.30),此時順滑平面的微分 為 σ v u α (3.39) 假設存在v 使得順滑函數保持為σ 0,即σTσ 0成立,接著,我們欲求系統在 順滑模式時對應的控制律v 。當系統處於順滑模式下時,σ σ 0,我們可得 v u α (3.40) 其中|u | |α |,(3.40)與(3.19)代入系統(3.29)可得 u α α u α α u u (3.41) 我們希望控制律v 會使得(3.29)的系統軌跡與標稱系統在標稱控制下的軌跡相 同,意即(3.41)與(3.28)相同。發生條件為u u α α ,移項整理可 得 2u α 2α 0,即α 0或α u 。因為我們考慮d 0,所以α 0不 合;而u 的值會隨系統狀態而變動,α u 發生之可能性極低,所以d 為形式 1 且 D 的選取為情況 2 時,二次多項式系統中只有匹配的系統不確定性下,所對 應的控制律使得系統維持順滑模式時,系統軌跡不會與標稱系統在標稱控制下的 軌跡相同。
所以當 與 線性獨立時,D 的選取考慮情況 1 與情況 2 時,我們必 須將d 改變為其他形式。在形式 1 中,S 的選取如(3.18)式,其中 向量的係 數為 向量的係數的平方倍,我們接下來嘗試選取 向量的係數與 向量的係數都為未知數,考慮二次多項式系統中只有匹配的系統不確定性下,當 系統維持順滑模式時,求出對應的控制律代入系統,可求出使得系統軌跡與標稱 系統在標稱控制下的軌跡相同時所滿足的 向量的係數與 向量的係數。 以下考慮d 的另一種形式。
3.2.2
的選取形式 2
在仿射系統(3.15)中 col(g),且 在此取法下 有最小值, 我們仿照仿射系統中匹配的系統參數不確定因素的選取方式,取 S S 的選取如下 S α α |α , α (3.42) α , α 未知,故只知道S 的幾何意義為 空間中的一條過原點的一維流形。 選取 如下 α α (3.43) 我們現在要求出 在形式2 下,α 與α 之關係,使得二次多項式系統中只有匹 配的系統不確定性下,當系統維持順滑模式時,所對應的控制律會使得系統軌跡 與標稱系統在標稱控制下的軌跡相同。 系統(3.12)不考慮系統參數不確定性時系統如(3.28),系統(3.12)只考慮匹配 的系統參數不確定性時系統如(3.29),其中d 不為零。順滑平面選取如(3.30) 其 中 。 將(3.42)代入(3.31)可得 σ v u α v u α (3.44) 以下考慮 與 為線性獨立時,兩種 的選取方式 情況 1: 且 此時順滑平面的微分為 σ v u α (3.45) 假設存在v 使得順滑函數保持為σ 0,即σTσ 0成立 接著,我們欲求系統在順滑模式時對應的控制律v當系統處於順滑模式下時,σ σ 0,我們可得到 v u α (3.46) (3.46)與代入系統(3.29)可得 u α α u α α u u 2u α α α (3.47) 我們希望v 會使得標稱系統在標稱控制下的軌跡相同,意即(3.47)與(3.28)相同。 發生條件為 α 2u α α (3.48) 且α 不為零,我們得到α 與α 關係如上式。將(3.48)代入(3.43)可得 α 2u α α (3.49) 上式為 在形式2 下的表示式。由(3.48)的關係式可得(3.42)中S 如下 S α 2u α α |α , u (3.50) 且 的選取為使得 有最小值,即 有最小值。S 的幾何意義 為 空間中的一條過原點的一維流形,其中S 會因u 值而不同,以下考慮u 值 對S 所產生的變化,選取 S α 2K α α |α S α 2K α α |α 其中K K ,S 與S 的幾何意義如圖3. 15 所示,皆為 空間中的一條過原 點的一維流形 。
圖3. 15: S 與S 在R 空間中的幾何意義 接下來我們必須決定如何選定α ,使得 有最小值,其中 S 。。 因為根據文獻[6]我們知道在順滑模態上,匹配的系統參數不確定因素會因 非連續控制律的的控制下而被完全消除,所以只需考慮非匹配的系統參數不確定 因素所造成的效應,且希望造成的效應希望能越小越好。如圖3. 16 所示,當給 定 d,我們想要試著找到 S ,使得 最小,意即找到α ,使得 α 2u α α 最小,我們定義α 如下 α arg min α 2u α α 我們可得 如下 α 2u α α (3.51) S S
圖3. 16:給定 時, 與 在R 空間中與S 之關係 在選定 後,我們必須驗證α 的存在性。 引理 3. 4 (存在性):當給定 、 及 時,P α min α 2u α α 必存在,即α 存在且 α 2u α α 存在。 證明: 當給定 、 及 時,假設多項式P 如下 P α α 2u α α α 2u α α T α 2u α α a α a α a α a α a (3.52) 其中 a a 2 2u a 2u 2u 2 a 2 2u S d
a
(3.52)中P α 為連續函數且a 0,且P α ∞ , 當α ∞
∞ , 當α ∞,根據極值定理 (extreme value theorem ),P 存在全域極小值,即α 必存在。
注意:在引理 3. 4 中α 存在,但一般來說α 不保證唯一。 (3.52)式中P α a α a α a α a α a 為連續函數且 a 0,由圖 3. 14,可得α ,α 代入(3.52)可得min P α =P α 。 接下來我們必須檢查選取的α 代入 α 2u α α ,是否會使得 ,若以上不等式成立,則相當於原參數不確定 因素所造成的效應被放大,不滿足我們的需求,所以必須要保證非匹配的系統參 數不確定因素的範數不會比系統參數不確定因素的範數大。 引理 3. 5:考慮系統(3.12),當給定 d,若我們可找到α ,使得 α argmin α 2u α α ,根據(3.9)式可得 α 2u α α ,則 d 與 滿足以下不等式 證明: 定義 α = α 2u α α 則 0 α 所以由以上證明可確定原參數不確定因素所造成的效應不會被放大
情況 2: 且 在情況二下, 形式如(3.51)時,二次多項式系統中只有匹配的系統不確定性下, 當系統維持順滑模式時,所對應的控制律會使得系統軌跡與標稱系統在標稱控制 下的軌跡相同,詳細證明於3.3.2.1 節。 我們將以上討論中 的選取整理如下表 表3. 3: 的選取 的選取 與 線性相依 α α 與 線性獨立 情況 1: α 2u α α 情況 2: α 2u α α
3.3 控制律設計
在3.1 節中我們將系統(3.1)之追蹤問題變成系統(3.12)之穩定化問題,為了利 用ISMC 設計系統(3.12)的穩定控制率,在 3.2 節中我們自行定義二次多項式中 的匹配式與非匹配式的參數不確定因素。接下來我們將利用ISMC 設計方式對系 統(3.12)設計控制律,使系統在有參數不確定因素 下達到穩定化,如此可同時達 到輸出追蹤與內部狀態穩定的目的。仿照ISMC 設計流程[5][6],我們將針對標 稱系統(3.13)設計標稱控制律,再針對有干擾系統(3.12)設計控制律。3.3.1 設計針對無干擾系統之 LQR 控制律
假設3. 1:考慮非線性的無干擾系統如下 v v (3.53) 存在一控制律v u 使系統(3.53)能區域漸進穩定 將系統(3.53)之 v 以u 代入並以如下形式表示: = , u (3.54) 仿照論文[4]中 LQR 控制律設計方式,將系統線性化得到系統矩陣 與控制矩陣 如下 , u , , u (3.55) 我們可得到線性化系統 u (3.56) 考慮優先降低系統反應,亦即需要較大控制力設計下,選取矩陣 (反應加權矩陣, response weighting matrix)與 (控制力加權矩陣,control force weighting matrix)值 如下, R 0.9 (3.57) (3.58) 此時使得成本指標(cost function) J T t t uT t Ru t dt達到最小 值的回授增益矩陣(feedback gain matrix)為1 2R T (3.59) 其中 為滿足Riccati 矩陣方程式 T R T 的矩陣 我們可以得到 u (3.60) u 可使線性化系統(3.56)漸進穩定,則u 可使系統(3.53)區域漸進穩定。
3.3.2 設計針對有干擾系統之 ISMC 控制律
在選定無干擾系統的控制律後,為了補償系統參數的不確定因素,我們採用 ISMC 設計方式。首先考慮系統只有匹配的系統參數不確定因素,並參考表 3. 3 中分類方式分別討論 與 線性相依與 與 線性獨立的情況, 設計控制律。3.3.2.1 考慮匹配的系統參數不確定因素
在這節中系統(3.12)只考慮匹配的系統參數不確定因素且Q 為定值,即 v v (3.61) 以下我們分為三種情況討論。 情況 A: 與 線性相依, 假設3. 2:A | |,B 2u ],C | α α |]且Δ B 4AC 0 參考表3. 3,可得 α α (3.62) 將(3.62)代入(3.61)可得 v α v α (3.63) 根據ISMC 設計步驟[5][6],系統(3.63)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.64) 其中 ,u 可由(3.60)得到,我們對(3.64)微分,可以得到 σ t u u v u v uv u α v u α (3.65) 設計控制律 v u ρ σ |σ|, 若 σ u , 若 σ 當σ 0,則在假設 3. 2下 σσ σ u ρ σ |σ| u α u ρ σ |σ| u α ρ σ ρ |σ| 2 u |σ| σ α α ρ σ| | ρ |σ| 2u |σ| |σ| | α α | |σ| ρ A ρB C 其中A 0且由假設 3. 2 可知ρ A ρB C之判別式B 4AC 0,如圖 3. 17所 示ρ A ρB C為上凹之二次多項式,必存在ρ使得σσ 0 圖3. 17:滿足 A 0且B 4AC 0之ρ A ρB C圖形 σσ ρ ρ A ρB C
我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得 v α u 1 D D v α u (3.66) 將(3.66)代入系統(3.63)可得 e v α α u D v α u D α u D D D u u (3.67) 所以當只有匹配的系統參數不確定性下,所對應的控制律使得系統維持順滑模式 時,系統軌跡會與標稱系統在標稱控制下的軌跡相同。 情況 B:D 且 D 參考表3. 3,可得 α 2u α α (3.68) 將(3.68)代入(3.61)可得 v α v 2u α α (3.69) 根據ISMC 設計步驟[5][6],系統(3.69)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.70) 其中 ,u 可由(3.60)得到,我們對(3.70)微分,可以得到 σ t u u v u v u v u α (3.71)
設計控制律 v u ρ σ | σ|, 若 σ u , 若 σ 當σ 0,取ρ |α | σσ σ u ρ σ | σ| u α |σ | ρ |α | 0 我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得 v u α (3.72) 將(3.72)代入系統(3.69)可得 e u α α u α 2u α α u u (3.73) 所以當只有匹配的系統參數不確定性下,所對應的控制律使得系統維持順滑模式 時,系統軌跡會與標稱系統在標稱控制下的軌跡相同。 情況 C: 且 假設3. 3: 2u α α ρ 假設3. 4:u ρ 參考表3. 3,可得 α 2u α α (3.74) 將(3.74)代入(3.61)可得 v α v 2u α α (3.75)
根據ISMC 設計步驟[5][6],系統(3.69)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.76) 其中 ,u 可由(3.60)得到,我們對(3.76)微分,可以得到 σ t u u v u v u v u 2u α α (3.77) 設計控制律 v u ρ σ | σ|, 若 σ u , 若 σ 當σ 0,在假設 3. 3 與假設 3. 4 下 σσ σ u 2u | σ σ|ρ ρ u 2u α α |σ | ρ 2|u |ρ ρ 0 由假設3. 4 可知ρ 2|u |ρ ρ 為判別式大於零且上凹之二次多項式,故必存在 ρ使得σσ 0 我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得 v u α (3.78) 取v u α 代入系統(3.75)可得 e u α α u α 2u α α u u (3.79) 所以當只有匹配的系統參數不確定性下,所對應的控制律使得系統維持順滑模式 時,系統軌跡會與標稱系統在標稱控制下的軌跡相同。
3.3.2.2 考慮非匹配的系統參數不確定因素
在3.3.2.節中,當我們只考慮匹配的系統參數不確定因素時,在情況 A、情 況B 與情況 C 下,可設計對應的控制律使得系統維持順滑模式時,系統軌跡會 與標稱系統在標稱控制下的軌跡相同。在本節我們考慮非匹配的系統參數不確定 因素,並分析非匹配的系統參數不確定因素對系統所產生之效應,然後透過選取 順滑平面中的 D 值盡可能降低非匹配的系統參數不確定因素對系統所產生之效 應。 在這節中考慮系統(3.12)且Q 為定值,即 v v (3.80) 以下我們分為三種情況討論。 假設3. 5:A =| |,B = [ 2u ],C =| α α |且Δ B 4A C 0 情況 A: 與 線性相依, 0 參考表3. 3,可得 α α (3.81) 將(3.81)代入(3.80)可得 v α v α (3.82) 根據ISMC 設計步驟[5][6],系統(3.80)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.83) 其中 ,u 可由(3.60)得到,我們對(3.64)微分,可以得到 σ t u u v u v u v u α v u α (3.84)設計控制律 v u ρ σ |σ|, 若 σ u , 若 σ 當σ 0,則在假設 3. 5下 σσ σ u ρ σ |σ| u α u ρ σ |σ| u α ρ σ ρ |σ| 2 u |σ| σ α α ρ | | ρ |σ| 2 u |σ| |σ| | α α | |σ| ρ A ρB C 由假設3. 5 可知ρ A ρB C 為判別式大於零且上凹之二次多項式,必存在ρ 使得σσ 0 我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得 v α u 1 v α u (3.85) 將(3.85)代入系統(3.82)可得 e v α α u α u D u u
Γ I (3.86) 其中Γ 為系統(3.80)非匹配參數不確定因素的效應,且Γ 會隨狀態改變, 我們只能試著調整 D 使得Γ 的效應最小。 當我們考慮 , 為常數時,我們選取 D= ,則 Γ I I 由[06]中證明可得 I 1,故 Γ 由上式可知若當我們考慮 , 為常數時,我們選取 D= 時,非匹 配的參數不確定因素不會被放大。
情況 B: D 且 D 參考表3. 3,可得 α 2u α α (3.87) 將(3.87)代入(3.80)可得 v α v 2u α α (3.88) 根據ISMC 設計步驟[5][6],系統(3.88)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.89) 其中 ,u 可由(3.60)得到,我們對(3.89)微分,可以得到 σ t u u v u v u v u α (3.90) 設計控制律 v u ρ σ | σ|, 若 σ u , 若 σ 當σ 0,取ρ |α | | | | | σσ σ u ρ| σ σ| u α |σ |ρ σ α σ |σ |ρ |σ ||α | |σ | | | | | |σ | ρ |α | | | | | 0
我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得 v u α (3.91) 將(3.91)代入系統(3.88)可得 e u α α u α 2 u α 2u α α u u 2 u α Γ 2 u α (3.92) 其中Γ 為系統(3.88)非匹配參數不確定因素的效應,且Γ 會隨狀態改變, 我們只能在 D 且 D 的條件下調整 D 值使得Γ 的效應最小。 情況 C: D 且 D 假設3. 6:2u α α ρ , DD ρ ,|u | ρ ρ 參考表3. 3,可得 α 2u α α (3.93) 將(3.87)代入(3.80)可得 v α v 2u α α (3.94)
根據ISMC 設計步驟[5][6],系統(3.94)的順滑平面選取如下: σ , t t t τ τ u τ u dτ (3.95) 其中 ,u 可由(3.60)得到,我們對(3.95)微分,可以得到 σ t u u v u v u v 2u α α u (3.96) 設計控制律 v u ρ σ | σ|, 若 σ u , 若 σ 當σ 0,在假設 3. 6 下 σσ σ u 2u ρ| | ρ 2u α α u |σ |ρ 2|u ||σ |ρ |σ | 2u α α |σ || | |σ | ρ 2|u ρ ρ ρ 0
由假設3. 6 可知 2|u | 4(ρ ρ ) 4(|u | ρ ρ 0,ρ 2|u |ρ ρ ρ 為判別式大於零且上凹之二次多項式,必存在ρ使得σσ 0
我們欲求系統在順滑模式時對應的控制律v 。當系統處於順滑模式下時, σ σ 0,我們可得
v u α (3.97)
e u α α u α 2u α α u u u α α u Γ u α α u (3.98) 其中Γ 為系統(3.94)非匹配參數不確定因素的效應,且Γ 會隨狀態改變, 我們只能在 且 的條件下調整 值使得Γ 的效應最小。
第四章
應用於變壓器控制電力系統的電壓
調節研究
在本章中我們將應用3.2 節中設計的控制律於 Dobson 和 Chiang[8]的電力系 統模型,在原始模型中加入一個變壓器[7],如 2.3 節所介紹的電力系統模型,以 變壓器為控制輸入點,藉由調整變壓器的匝數比,使系統負載電壓能穩定在我們 希望的電壓值,來達到電壓調節的功能及內部狀態穩定的目的。在4.1 節中,我 們整理Dobson 和 Chiang 的電力系統模型加入變壓器之系統動態方程式。在 4.2 節中,我們將3.3 節針對單輸入單輸出的二次多項式系統設計的控制律應用於電 力系統中,並對模擬結果進行討論與分析。在4.3 節中,我們將比較 ISMC、SMC 及CLF 控制律應用於電力系統時的性能表現。4.1 系統動態方程式
在2.3 節中,將 Dobson 和 Chiang [8]的電力系統模型加入一個變壓器[7],經 過參數的選取與整理得到(2. 14)-(2. 17)式,在本論文中,我們假設d只來自於Q 的 變動,我們可將(2. 14)-(2. 17)表示成如下的形式 u u t (4. 1) 其中 f f f f , g , g , g , g , , g , g , g , g , , 0 0 33.3333Q 5.2288Q f x f 1.8807 0.1667x f 43.3333 93.3333x 334.1297x 666.6667x cos 0.0873 x f 7.0327 14.5229x 53.0961x 104.5752x cos 0.0873 x 7.8431x sin 0.0873 x g , 0 g , 16.6667x sin 0.0873 x x g , 166.6667x cos 0.0873 x x g , 26.1438x cos 0.0873 x x 1.9608x sin 0.0873 x x g , 0 g , 0 g , 166.0325x g , 26.2152xp 0 p 0 p 33.3333Q p 5.2288Q 其中Q 為系統中的一個參數,代表負載的無效功率消耗,我們可以將Q 以 Q Q ΔQ 表示,其中Q 代表實際的負載無效功率消耗,Q 代表量測的負 載無效功率消耗,ΔQ 代表負載無效功率的誤差量。 則我們可以將 表示成如下的形式: 其中 . Q . Q , . Q . Q 則電力系統可以表示成如下的形式 u u (4. 2) 在此,我們選擇系統電壓為系統輸出 y x (4. 3) 我們定義電壓調節值y 1
4.2 控制律設計
4.2.1 系統平衡點分析
考慮無干擾系統如下: u u (4. 4) 由於控制目標是讓負載電壓固定穩定在1,我們針對無干擾系統設計預備控制律 u 使負載電壓固定在 1,並找出對應之平衡點 ,則必須滿足下列 0 x (4. 5) 0 1.8807 0.1667x 16.6667sin 0.0873 x x u (4. 6) 0 284.1297 666.6667 cos 0.0873 x 33.3333Q 166.6667 cos 0.0873 x x u 166.0325u (4. 7) 0 45.6059 104.5752 cos 0.0873 x 7.8431 sin 0.0873 x 5.2288Q 26.1438 cos 0.0873 x x 1.9608sin 0.0873 x x u 26.2152u (4. 8) 由(4. 5)-(4. 8)中,要解得符合的平衡點 與u 並非容易,且x 與u 的值會隨 Q 值變化而變化,由(4. 5) 可以得知x 0,在論文[17]利用”AUTO”來求得(4. 5)-(4. 8)的平衡點與u 。經由”AUTO”計算後,我們可以得到兩組平衡點與u 為正 的解,分別為 x x , 0, x T、u 及 x x , 0, x T、u ,我們將 兩組平衡點與u 分別以實線與虛線來表示如圖 4. 1 所示,同時也可以得到兩組衡 點與u 為負的解,我們將兩組平衡點與u 分別以實線與虛線來表示如圖 4. 2 所示, 但u 為負,由於控制輸入點為變壓器匝數比倒數,u 為負得到負的匝數比與實際 系統不符,故選用u 為正的解。由圖 4. 1 我們可以觀察在Q 12.45就無平衡 點與u 存在。 接下來我們將利用系統線性化來判斷所得的平衡點是否為穩定的平衡點。圖4. 1: u 為正值,平衡點 與u 對Q 的變化 圖4. 2: u 為負值,平衡點 與u 對Q 的變化 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 0 2 4 x 10 Q10 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 -0.04 -0.02 0 x 30 Q10 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 0 0.5 1 1.5 u 0 Q 10 x011 x021 x 013 x023 u01 u02 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 -4 -2 0 x 10 Q10 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 -0.05 0 0.05 x 30 Q10 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 -1.5 -1 -0.5 0 u 0 Q 10






![圖 3. 15: S 與S 在R 空間中的幾何意義 接下來我們必須決定如何選定α ,使得 有最小值,其中 S 。。 因為根據文獻[6]我們知道在順滑模態上,匹配的系統參數不確定因素會因 非連續控制律的的控制下而被完全消除,所以只需考慮非匹配的系統參數不確定 因素所造成的效應,且希望造成的效應希望能越小越好。如圖 3](https://thumb-ap.123doks.com/thumbv2/9libinfo/8473941.183657/55.892.174.715.156.529/接下來上匹配的系統參數不確定因素會因非連續控制律效應且希望造.webp)