國立交通大學
運輸科技與管理學系
碩士論文
號誌路口車輛行進軌跡之模化
與延滯時間之比較
The Modeling of Vehicle Trajectories and the Comparison
of Delays at Signalized Intersections
研
究
生
: 陳韻竹
指 導 教 授 : 卓訓榮 教授
林貴璽 教授
號誌路口車輛行進軌跡之模化與延滯時間之比較
The Modeling of Vehicle Trajectories and the Comparison
of Delays at Signalized Intersections
研究生 :陳韻竹
Student:Yun-Chu Chen
指導教授:卓訓榮 林貴璽
Advisor:Dr. Hsun-Jung Cho
Dr. Guey-Shii Lin
國立交通大學
運輸科技與管理學系
碩士論文
A Thesis
Submitted to Department of Transportation Technology & Management
College of Management
National Chiao Tung University
in Parttial Fulfillment of the Requirements
for the Degree of
Master
in
Transportation Technology and Management
June 2005
Hsinchu, Taiwan, Republic of China
號誌路口車輛行進軌跡之模化與延滯時間之比較
研究生:陳韻竹 指導教授:卓訓榮 林貴璽 國立交通大學運輸科技與管理研究所摘要
號誌化交叉路口匯集各種不同方向車流,在車流密度過大或號誌時制設計不 佳時,經常會成為都市交通的瓶頸,其影響路網績效甚鉅。平均延滯是一衡量交 叉路口運轉績效的重要指標。延滯在評估道路設施服務水準與號誌設計等方面深 受重視,以往在路口延滯的相關研究中,大多是估計停等延滯,再藉轉換因素來 推估臨進路段延滯,惟停等延滯在某些情況下會出現較大的誤差,間接也影響到 臨進路段延滯。而車隊時間延滯在定義上可以涵蓋停等延滯與臨進路段延滯,本 研究欲以實證法探討以車隊時間延滯直接估計路口的延滯,並在不同需求或交通 控制情況下,利用車輛軌跡圖解法推算各種延滯值。 有鑑於一般文獻所使用的延滯模式,大多以停等延滯為基礎,而直接引用國 外的延滯模式也常無法兼顧國內的交通型態,所以本研究先分析並探討導致車輛 延滯之因素,作為建構延滯模式的基礎。再以調查資料分析車輛進出號誌交叉路 口的情形,整理出車輛在交叉路口停等位置與離開速率的關係。並由調查之延滯 資料來驗證模式之正確性,最後利用本研究所建構之模式直接算得延滯值,作為 評估交叉路口服務水準與交通控制策略之參考。 建構的延滯模式配合使用 JAVA 程式語言所撰寫出的模擬程式,利用追蹤車 輛軌跡的方式,用圖解法計算出停等延滯、路口臨進路段延滯和車隊時間延滯。 由模擬過程發現模式所估計之平均車輛延滯值,包含車隊時間延滯和停等延滯, 與實際調查之延滯值相近,說明了模式的可用性。從敏感度分析上,車隊時間延 滯比停等延滯和臨進路段延滯來的大。本研究亦探討在特殊情況下下,如:路段 長度過長、等減速度值極小以及臨進速率值極大等,使用車隊時間延滯值的缺點。 關鍵字:停等延滯、車隊時間延滯、臨進路段延滯、車輛軌跡、時空圖。The Modeling of Vehicle Trajectories and the Comparison
of Delays at Signalized Intersections
Student:Yun-Chu Chen Advisor:Dr. Hsun-Jung Cho Dr. Guey-Shii Lin Department of Transportation & Management
Nation Chiao Tung University
Abstract
Signalized intersections are the locations that convert each approaching traffic stream into merging, diverging, and intersecting movements. Such locations will become the bottlenecks that may further degrade the traffic system due to dense demand and/or worse signal installation. Delays have been long term known as one of the most important indices in evaluating intersection control performance, for instance, the level of service and/or signal timing design. It is seen that most of the past research had widely applied the stopped delay as a basis to estimate some others such as approach delays. Unfortunately, this may sometimes lead to a higher estimation error. With the above consideration, this study is intended to explore and measure the other term, time-in-queue delay, for intersections using the graphic method supported by field data.
Because most of the delay models were developed based on stopped delays and the traffic characteristics may vary greatly between countries, directly citing the existing models, approaches, or specific research results for delays may greatly deviate the true value in our country. Thus, this study first analyzed some key elements of delay time with which the analytical delay model could be formulated. Secondly, the location of each vehicle entering and leaving the signal at each time slice during the study period was traced and recorded. The trajectories of all individual vehicles were then plotted to verify the model validity. Finally, the analytical model was directly used to estimate various delay values for evaluating service quality and traffic control alternatives at intersections.
Based on the analytical model, a simulation program was developed in JAVA in order to generate successive vehicle arrivals and record their corresponding trajectories when approaching the signal. With the data recorded, the stopped delay, approach delay, and time-in-queue delay to individual vehicles could be estimated separately. The simulation results showed that the three estimated delays were fairly
close to those collected at sites. A series of sensitivity tests also showed that the time-in-queue delays are larger than the other two. In addition, this study also discussed the drawbacks of using time-in-queue delay when special conditions such as long distance travel approaches, extremely small deceleration rate, and high approaching speeds occur.
Keywords: Stopped delay, Time-in-queue delay, Approach delay, vehicle trajectories, Time-space diagram
誌 謝
感謝指導教授卓訓榮和林貴璽博士,在碩士班這兩年中的教誨,不論在研究 領域上或是生活學習上,皆能適時地給予督促與指導。另外更要感謝口試委員: 吳水威博士及吳宗修博士給予本論文指導與建議,使本論文得以順利完成。 在研究所的兩年中,特別感謝育婷學姐帶領我進入這個研究領域,並且在 我研究過程中給予我許多幫助。特別感謝和我同時進入研究所以及陪我兩年的同 窗,他們是勛傑、又菁、郭佳、小刀、昆諭、俊得、建銘、健綸等願他們將來一 帆風順。另外,感謝銘崇、小宏、杜寰、昆庭、貝哥、百晉等學長對於學業上及 生活上的指導,以及永平、家銘、又禎等學弟為枯燥乏味的研究生生活點綴了不 少歡樂的氣氛,使我在這兩年中留下美好及深刻的回憶。最後,感謝網球隊的教 練和夥伴,詹益新老師、伍啟萌老師、士豪、冠潔、怡伶、燕霖、小 Z、又旭、 家倫、正洋等球友,他們在學業之餘,陪我歡笑、給予我球技上的指導,並讓我 在梅竹賽及大專盃裡留下最美好的回憶。 感謝我摯愛的親人,無怨無悔的奉獻出他們的一切,讓我能無後顧之憂的完 成學位。最後,感謝讓我ㄧ路成長,在我人生當中陪伴我走過無數風雨的書聖, 能與他分享所有的喜怒哀樂,是我人生最大的幸福與快樂。 在成長的路上,謝謝所有身邊的人給我的幫助。而碩士學位的完成,並不是 代表著結束,而是一個新的開始。僅將此論文獻給我的家人、愛我的人及我所愛 的人,願他們能分享這得來不易的喜悅,並由衷地祝福他們能永遠健康快樂。目錄
中文摘要
... i
英文摘要
... ii
誌
謝 ... iv
目錄
...v
表目錄
... vii
圖目錄
... viii
第一章
緒論
...1
1.1 研究背景...1 1.2 研究目的...2 1.3 研究範圍與方法...2 1.4 研究流程...2第二章
文獻回顧
...5
2.1 號誌化交叉路口車輛延滯...5 2.1.1 延滯之定義...5 2.1.2 延滯模式之整理與討論...8 2.2 車輛的路口行為特性... 11 2.2.1 車輛到達路口分配... 11 2.2.2 TRANSYT 模式計算車輛停止之原理 ...12 2.3 車輛的紓解特性...12 2.4 車隊時間延滯的計算方式【12】...13 2.4.1 時空圖(Time-Space Diagram) ...13 2.4.2 輸入與輸出(Input-Output Diagram)法...16 2.5 文獻回顧評析...17第三章
系統架構與模式建構
...18
3.1 系統定義...18 3.2 車隊時間延滯車輛紓解速度的探討...18 3.2.1 車輛的單階段紓解速率...20 3.2.2 車隊的單階段紓解速率...223.2.3 車隊二階紓解速率...22
第四章
資料調查整理與分析
...24
4.1 調查計畫...24 4.1.1 調查目的...24 4.1.2 調查方法...24 4.1.3 調查地點...24 4.2 調查資料整理...27 4.2.1 資料收集...27 4.2.2 資料整理方法...27 4.2.3 資料之彙整...28第五章
模式驗證與範例分析
...30
5.1 模式模擬驗證...30 5.1.1 程式的撰寫...30 5.1.2 模擬調查路口範例...34 5.2 敏感度分析...39 5.3 兩交叉路段模擬...51 5.4 車隊時間延滯與臨近路段延滯的消長...53 5.5 本章小節...54第六章
結論與建議
...55
6.1 結論...55 6.2 建議...55參考文獻
...57
附錄一
...58
附錄二
...68
表目錄
表 4-1 調查路口之路口條件表...25 表 4-2 各調查路口的停等延滯值和車隊時間延滯值...28 表 4-3 車輛在車隊裡對應的加速度...28 表 4-4 車輛在車隊中的位置...29 表 5-1 各調查路口的延滯值和程式模擬後的延滯值...34 表 5-2 交通量V =500輛/時在各週期長度下不同綠燈時間延滯值 ...40 表 5-2 交通量V =500輛/時在各週期長度下不同綠燈時間延滯值(續)...41 表 5-3 交通量V =1000輛/時在各週期長度下不同綠燈時間延滯值 ...42 表 5-3 交通量V =1000輛/時在各週期長度下不同綠燈時間延滯值(續)...43 表 5-4 交通量V =1500輛/時在各週期長度下不同綠燈時間延滯值 ...44 表 5-4 交通量V =1500輛/時在各週期長度下不同綠燈時間延滯值(續)...45 表 5-5 情境一:在不同週期下之各項平均延滯值...52 表 5-6 情境二:在不同週期下每一車輛各項平均延滯值...52 表 5-7 情境三:在不同週期下每一車輛各項平均延滯值...53圖目錄
圖 1-1 時空圖上的各種延滯...2 圖 1-2 研究流程圖...4 圖 2-1 號誌化路口車輛延滯時空圖...7 圖 2-2 TRANSYT 中車輛停止之計算原理 ...12 圖 2-3 一般紓解速率的時空示意圖...13 圖 2-4 TRANSYT-7F STOP 的計算方式 ...13 圖 2-5 車輛接近車隊上游的軌跡...14 圖 2-6 車輛真實且期望的軌跡...15 圖 2-7 輸入輸出圖...16 圖 2-8 修正過的輸入輸出法圖...17 圖 3-1 一般時空圖計算方法...19 圖 3-2 一般紓解速率計算方式...19 圖 3-3 車輛啟動位置的變化圖...20 圖 3-4 使用加速度a之紓解圖 ...21 圖 3-5 單一階段紓解速率圖...21 圖 3-6 二階段紓解圖...23 圖 4-1 經國路、西大路交叉路口幾何路型...25 圖 4-2 經國路、鐵道路交叉路口幾何路型圖...26 圖 4-3 自由路、中央路交叉路口幾何路型圖...26 圖 4-4 光復路、學府路交叉路口幾何路型圖...27 圖 4-5 加速度與車序關係圖...29 圖 4-6 車序與車輛位置關係圖...29 圖 5-2 紅綠燈停等判斷圖...31 圖 5-1 程式的流程圖...33 圖 5-2 經國路與西大路交口車輛模擬軌跡圖...35 圖 5-3 經國路與鐵道路交口車輛模擬軌跡圖...36 圖 5-4 自由路與中央路交口車輛模擬軌跡圖...37 圖 5-5 光復路與學府路交口車輛模擬軌跡圖...38 圖 5-6 週期長度 50 秒、綠燈時間 15 秒的交通量與延滯值關係圖...46 圖 5-7 週期長度 60 秒、綠燈時間 25 秒的交通量與延滯值關係圖...46 圖 5-8 週期長度 70 秒、綠燈時間 35 秒的交通量與延滯值關係圖...46 圖 5-9 週期長度 80 秒、綠燈時間 45 秒的交通量與延滯值關係圖...47 圖 5-10 週期長度 90 秒、綠燈時間 55 秒的交通量與延滯值關係圖...47 圖 5-11 週期長度 100 秒、綠燈時間 65 秒的交通量與延滯值關係圖...47 圖 5-12 週期長度 110 秒、綠燈時間 75 秒交通量與延滯值的關係圖...48 圖 5-13 週期長度 120 秒、綠燈時間 85 秒的交通量與延滯值關係圖...48 圖 5-14 在低流量下綠燈時間與延滯值的關係圖...48 圖 5-14 在低流量下綠燈時間與延滯值的關係圖(續)...49 圖 5-14 在低流量下綠燈時間與延滯值的關係圖(續)...49 圖 5-15 在中流量下綠燈時間與延滯值的關係圖...49 圖 5-15 在中流量下綠燈時間與延滯值的關係圖(續)...50 圖 5-15 在中流量下綠燈時間與延滯值的關係圖(續)...50圖 5-16 在高流量下綠燈時間與延滯值的關係圖...50
圖 5-16 在高流量下綠燈時間與延滯值的關係圖(續)...51
圖 5-16 在高流量下綠燈時間與延滯值的關係圖(續)...51
第一章 緒論
1.1 研究背景
都市幹道系統係交通運行之主要動脈,車流運作之順暢與否關係路網運輸機 能的好壞。然由於都市幹道沿線各路口多為號誌化,車流在交叉路口複雜穿越、 併入、分出等行為,常導致衝突與干擾,若加上號誌時制設計不當,一旦發生擁 擠與阻塞,則將使車輛的行駛時間增加,也因而產生車輛延滯(delay)。 「延滯」(delay)具有適當地反應各種不同運轉情況下實際車流移動特性, 因此成為衡量交叉路口運轉績效的重要因子。由於各種延滯值皆會隨著車流量增 加而上升,所以倘若對各交叉路口發生延滯的原因,不能夠充分的瞭解與掌握, 或引用不當之延滯資料,則對交叉路口的改善工作可能有不良影響。近年來,許 多研究也常使用延滯來評估路口的服務水準,並以「最小延滯」作為號誌週期、 時制最佳化設計的標準與依據,除此之外,大部分駕駛人最在乎的就是旅行時間 的長短,而延滯的大小會直接影響駕駛者的旅行時間。因此不同的延滯估算模 式,不但會影響交叉路口服務水準績效的評定結果,所估算的延滯值更是駕駛人 評斷道路順暢的重要依據。 延滯可定義成當車流在路段上行駛時,被某些因素,如車流間的摩擦干擾及 交通管制設施等影響或阻滯,以致使行駛時間發生的阻延和失誤。一般來說延滯 可分成五類:分別為旅行時間延滯(Travel Time Delay)、停等延滯(Stop Delay)、 臨近路段延滯(Approach Delay)、控制延滯(Control Delay)、車隊時間延滯(Time in Queue Delay)。推估延滯除了可以比較不同路口的績效,更可以比較在不同的 交通控制下同一路口的績效變化。一般而言,號誌交叉路口之績效,雖憑經驗或 直接使用一些推估方法來衡量,但因延滯會受一些外在因素影響,其精確度令人 懷疑。例如在,擁擠車流的情況下,車輛依然可以很緩慢的前進,在此種情況下, 因為車輛完全沒有停等的跡象,故停等延滯值為零,因此就無法估算出臨近路段 延滯,很明顯地,使用停等延滯所建構的延滯模式會有類似的缺陷。而使用車隊 時間延滯(Time in Queue Delay)就較不會有此狀況。從定義來看(如圖1),車 隊時間延滯可以取代任何一種延滯,而其他種類之延滯卻不能取代車隊時間延 滯,由此可知,車隊時間延滯比其他延滯更實用些。 臨近路段延滯只考慮到在臨近路段上之活動,包括加減速、變換車道、受到 其他車輛干擾及停等,但未直接考慮交通控制及駕駛人的行為等,而控制延滯僅 僅只考慮交通控制策略,未考慮其他行為狀況(例如:變換車道、超車、加減速 等),而車隊時間延滯會受到控制策略、交通狀況、路口幾何設計、交通管理、 駕駛人的行為、氣候及能見度等因素的影響,其中控制策略主要是指號誌的時制 設計而言。本研究欲探討使用車隊時間延滯直接估計路口的延滯,會與使用其他 種類延滯所估算延滯值的差別,並在不同需求或交通控制情況下,預估車輛延滯。時間 距 離 (distance) 車隊時間延滯 控制延滯 停等延滯 (time) 真實的行駛軌跡 不受號誌控 制干擾的行 駛軌跡 自由車流速率行 駛的軌跡 路口延滯 圖 1-1 時空圖上的各種延滯
1.2 研究目的
本研究主要探討號誌路口臨近路段的延滯特性,本研究之目的如下: 1. 分析與探討導致號誌化交叉路口車輛延滯之因素,以作為建構延滯模式的基 礎。 2. 由實際調查資料分析個別車輛進出號誌化交叉路口的情形,整理車輛在交叉 路口停等位置與離開速率的關係,並由調查之延滯資料來驗證模式之正確 性。 3. 利用本研究模式直接求得延滯值的結果,提供評估交叉路口服務水準與交通 控制策略之參考指標。1.3 研究範圍與方法
車輛行經交叉路口因號誌設施或其他因素所引起的之延滯為本研究的對 象,研究範圍將以獨立號誌化路口之鄰近路段,車流的組成以單一車種為主。研 究的方法擬以推算公式的方式來建立車輛車隊時間延滯模式。而在一般實際路口 調查方法上,採用「路徑軌跡法」來收集現場的停等與行進資料,因本研究係要 追蹤每部車的動態位置,。1.4 研究流程
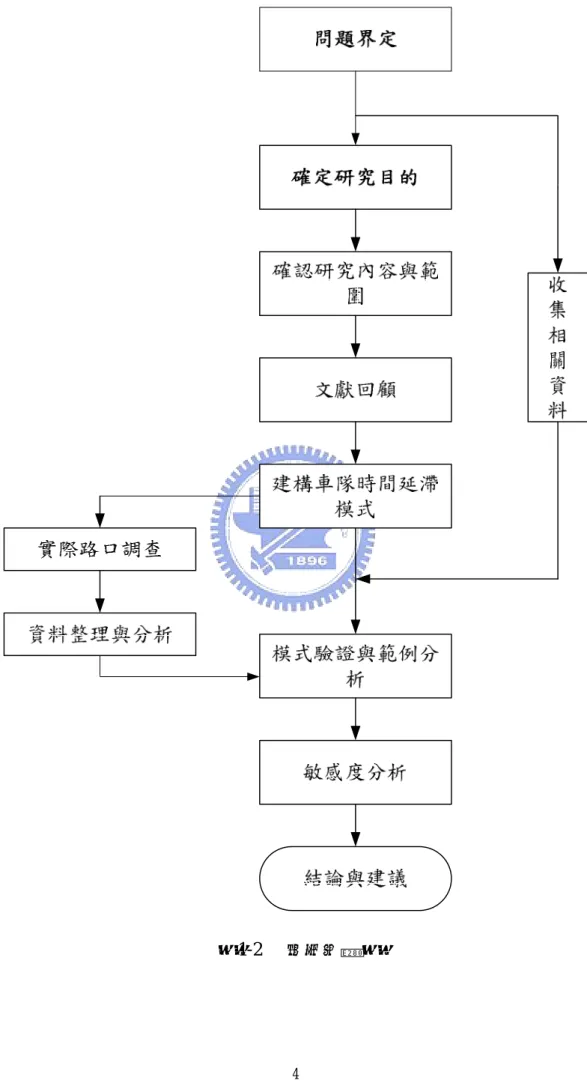
本研究主要在於瞭解車輛在通過交叉路口時的特性,例如停等行為、紓解行 為以及延滯情形。研究步驟分述如下:1. 確定研究目的與範圍 探討針對車隊時間延滯所發展的定性延滯模式對交叉路口號誌控制的影 響,利用模式的特性,應用在實際的路口研究中,並加以比較、分析。研究 範圍為定時號誌交叉路口的單一臨近路段延滯,且只探討單一直行車道。 2. 文獻回顧 文獻回顧可分為四個部分,分別為延滯的分類與定義、號誌化交叉路口車輛 延滯的相關研究、車隊時間延滯的估算模式,以及車輛在路口行為特性文獻。 3. 車隊時間延滯模式的發展 從車輛紓解情形,配合牛頓第二運動定律,繪製出每一車輛進入路段之車輛 時空軌跡圖,再從軌跡圖及延滯的定義推算出車隊中每一車輛之延滯值。 4. 資料收集整理與分析 選定新竹市數個交叉路口,配合建構的延滯模式中之各項變數進行延滯資料 調查,經由路口調查取得所需資料。調查時間每次為50分鐘(約含有15-18 個週期),每個路口攝影三次,以增加調查資料的樣本數。利用資料收集分 析來驗證所建構的模式。 5. 模式驗證與範例分析 將所調查之實際延滯時間與模式推導之延滯時間做比較,並做一個範例分 析,以推斷模式的準確性。 6. 敏感度分析 分析在不同交通流量、週期長度和綠燈時間下車隊時間延滯、停等延滯和臨 近路段延滯的大小變化及車隊時間延滯與臨近路段延滯的消長。 7. 結論與建議 檢討模式適用的情況,整理研究結果歸納成結論,並建議未來可繼續的研究 方向。 整個研究流程如圖1-2所示。
第二章 文獻回顧
號誌化交叉路口車輛延滯理論模式的推演與發展主要目的在衡量車輛在路 口之延滯量,由於歷來對於延滯的定義與分類不同,因此所發展的解析模式也各 不同。早期交叉路口車輛延滯研究以固定週期時制(Fixed Cycle)之號誌化交叉 路口為主要對象,先考慮未飽和(non-saturated)的車流情況,再擴展到過飽和 (over-saturated)的車流狀況,進而探討依時需求(time dependent demand)與 車隊(platoon)到達的情形。茲將有關交叉路口車輛延滯定義、種類等重要研究 之回顧敘述於2.1節,並在2.2節中詳細回顧延滯的相關模式,2.3節探討車輛的紓 解特性,最後於2.4節探討車隊時間延滯的一般計算方式。
2.1 號誌化交叉路口車輛延滯
交叉路口延滯是衡量路口服務績效最重要的指標之一,而衡量交叉路口延滯 值以實地觀測所得到數據最為準確;由於各路口的交通、幾何與控制況狀不一, 若要依不同的路口分類對各路口實地調查,則是相當耗時費力的工作。發展號誌 化交叉路口延滯模式的目的,即在考慮路口的資料條件後,以單一數學式來估算 個別路口的車輛延滯,進而評定其服務績效。因歷來對延滯的定義與分類不同, 所研擬的延滯模式也有相異之處,本小節擬對延滯的定義與模式做一整理。2.1.1 延滯之定義
延滯為當車流(車輛)在路段上行駛時,被某種因素(如車流間對向或側向 車輛、混合車流;車輛本身的性能等)的摩擦干擾以及交通管制設施等的所影響 或阻滯,致使車輛無法以自由速率(free flow speed)行進,故行駛時間發生的 阻延和失誤。簡單的說延滯為「實際行駛時間」與「以自由速率行駛所需的時間」 的差【1】。1985年HCM對延滯的廣義解釋為「當車輛駕駛者或乘客行經一路口 或路段,除合理通行時間外,所額外增加的行車時間。」【11】,若應用在號誌化 交叉路口,則可定義為當車輛通過路口時,因受到路口各項交通、幾何與管制條 件(如號誌、車流量、路型等因素)影響所需花費的總時間,減去完全沒受到任 何因素影響而通過路口的總時間,則稱為總延滯值(Total delay)。 依照Allsop【7】之定義為「設在進入臨近路口路段(Approach)前與後皆 有一參考點,車輛到達此區間時,因受號誌時制的影響而減速或停止,因此延滯 係指車輛經過該區間的實際旅行時間與不受交叉路口影響的旅行時間差」 因此交叉路口延滯可,分為以下三種【4】: (1) 臨進路段延滯(Approach Delay) 依車輛花費在路口的總時間與其以自由車流速通過的時間差,包括車輛在臨 進路段(Approach section)內的加減速、變換車道、受其他車輛的干擾以及 停等所產生的時間延滯;因此,路口延滯可再細分為減速延滯(到達路口 時)、固定延滯(停等延滯)、起動延滯(離開路口),以及轉向延滯等。(2) 車隊時間延滯(Time in queue Delay) 依車輛花費在車隊內的總時間,即由接在車隊之後起算,直到通過停止線為 止。 (3) 停等延滯(Stopped Delay) 依車輛在交叉路口煞停的時間長度,即車輛輪胎鎖定不動的時間損失。 此三種最為常見的分法,其中臨進路段延滯因調查與估算不易,所以多以停 等延滯來換算。由 Cohen & Reilly 【10】的研究可知,停等延滯(D )在有s 效性方面雖不及臨進路段延滯,但因為其易測量性大,且與臨進路段延滯(D )a 之關係為Ds =0.76*Da−0.99的判定係數,R 高達0.96,表示停等延滯足以相當2 程度代表臨進路段延滯,而且臨進路段延滯大約為停等延滯的1.3倍。 在國內車輛延滯研究中,魏健宏先生【1】在1985年曾定義延滯為: (1) 運行延滯(Operational Delay) 由於車流構成分子間相互干擾所產生之時間損失,多發生在路段中。 (2) 固定延滯(Fixed Delay) 由於交通控制設施所引起之時間損失,多發生於交叉路口。 (3) 行駛時間延滯(Travel Time Delay)
車輛經過某段道路所須之實際行駛時間減去以期望速率行駛所需時間之差 值。所謂期望速率(Desired Speed)是指車輛在市區號誌控制街道行駛時, 在不受前車影響下,依駕駛者本身之意願加速至近乎自由流之穩定車流。 何美瑩先生【2】在1990年將車輛延滯依車輛操作行為和號誌作用之影響, 分為路口延滯、車隊時間延滯、停等延滯三種: (1) 路口延滯(Approach Delay)
係指一車輛花費在臨進路段的總時間與其以自由流速(Free Flow Speed)通 過的時間的差值。此包括車輛在臨進路段(Approach section)內的一切動作, 如加減速、變換車道、受其他車輛干擾、停等所產生的所有時間損失。 (2) 車隊時間延滯(Time in Queue Delay)
係指一車輛跟在等候隊伍內的總時間,即由接到車隊尾端起,直到其通過停 止線為止。 (3) 停等延滯(Stopped Delay) 係指一車輛在交叉路口,其所停止的總時間,即車輛輪胎鎖定不定的延時。 吳水威先生【3】認為車輛延滯依其發生地點,可分為臨近路段延滯和交叉 路口延滯兩種,其中號誌化交叉路口延滯又可細分為:減速延滯(到達路口時)、 停等延滯、起動與加速延滯(離開路口時)、以及轉向延滯四種。 蔡輝昇先生【4】認為延滯包括: (1) 固定延滯(Fixed Delay) 主要係車輛在運行中因遇到交通號誌的管制,必須停等所消耗的時間,其與 現有交通量或車輛間的干擾現象無關。這種延滯一般發生在交叉路口。 (2) 旅行時間延滯(Travel Time Delay)
況下,平均行駛時間的差值。這種延滯除了停等時間延滯外,還包括因加速 與減速所造成的延滯。 (3) 停等時間延滯(Stop Delay) 由於行進中車輛受到某因素的影響,導致必須使車輛停等所造成的延滯。 (4) 臨進路段延滯(Appreoach Delay) 車輛行經交叉路口時,在交叉路口臨進路段上所發生的延滯。 (5) 運行延滯(Operation Delay) 因同向車流彼此之間之干擾,或為等待橫向車流間之適當車間距以便通行, 或因擁擠、停車、行人或轉向干擾所耗費的時間。 郭梅芬先生【5】則把延滯定義成: 「車輛在號誌由綠燈轉為紅燈之後會於某處開始減速,此即減速臨界線; 反之,號誌由紅燈轉為綠燈,車輛自起動、逐漸加速至正常速率之處,則稱為加 速臨界線。車輛行經加、減速臨界線間之『實際行駛時間』與『以自由速率行駛 所需的時間』的差就是號誌化路口的車輛延滯」。換言之,直進車輛在臨近路段 接近路口時遇到紅燈,首先會減速,然後停止、等待,直到號誌轉為綠燈時,車 輛會再起動、加速離開。圖2-1中之A、B、C、D各代表四輛車,其自由行駛速 率相同,SS'表示交叉路段臨進路段之停止線,圖中之橫軸為時間先後,縱軸為 空間位置。當A車通過交叉路口時,因該行車方向為綠燈,故A車沒有受到任何 延滯;當號誌轉變為紅燈時,此時B車由於尚未到達路口,於是開始減速,並且 停等於停止線前,之後C車與D車也在紅燈時間內到達交叉路口,並加入等候線; 當號誌轉變為綠燈後,B車與C車相繼加速離開,D車則來不及在此綠燈時間內離 開,必須繼續留在等候線上,等待下一個綠燈。圖中b1−b4即為號誌化交叉路口 之車輛延滯,其減速延滯為b1b2,停等延滯為b2b3,加速延滯為b3b4。 圖 2-1 號誌化路口車輛延滯時空圖
2.1.2 延滯模式之整理與討論
符號說明: d=平均每車延滯(sec) C=週期長度(sec) g =有效綠燈時間(sec) r =紅燈時間(sec) t r R= ∆ C g = λ q =到達率(veh/sec) s=飽和流率(veh/sec) x=飽和度(x=qC sg) t q x s q y= =λ⋅ = ⋅∆ I =每週期到達車輛數之變異數與平均數之比 Q =容量(veh/hr) 0 Q =溢流時之等候車輛數 t ∆ =時間間隔(sec)=1/s T =流率 q 之時間長度(hr) 延滯具有適當地反映各種不同運轉情況下實際車流移動與現場實際幾何、控 制資料等特性【8】。因此成為衡量交叉路口運轉績效的重要因子。1978 年,T.C Sutaria 和 J.J.Haynes 對於 310 位駕駛者進行調查,結果顯示:延滯是評估道路和 交叉路口服務水準的最重要指標,同時發現平均車輛延滯與v /c之相關性高於平 均車輛延滯與負荷因子的相關性【9】。1985 年版美國公路延滯容量手冊(HCM) 更以延滯取代v /c值做為衡量號誌化交叉路口服務水準的主要指標【11】。 關於車輛延滯的估計,過去的研究依其影響變數與到達型態不同而提出不少 估計方程式。一般考慮的影響因素,主要有到達率、飽和流率、週期長度、有效 綠燈時間、或 I-ratio(即到達車輛的變異數與平均數之比)等。以下則分別敘 述各模式之特性及優點: (1) 最早的延滯模式由 Clayton【9】所提出,假設車輛是在同一規律型態到達交 叉路口,即呈現 Regular Arrival 所得車輛平均延滯如下式:(
)
(
y)
C d − − = 1 2 1 λ 2期中d為平均每車延滯,C為週期長度, C g = λ ,g 為有效綠燈時間, s q y= , q 為車輛到達,s為飽和紓解率。此式成為以後各延滯模式的基礎。但其假設 過份簡單,車輛規則到達與實際情形不符,易低估實際的延滯,也無法估算 過飽和(Overflow)情形之延滯。 (2) 延滯公式最著名者為 1985 年 Webster【15】所建立,其假設到達方式為 Poisson arrival,綠燈一亮,車流即以飽和車流率駛離路口的停止線,利用模擬技術 與迴歸方法,獲得平均每車延滯d如下式:
(
)
(
λ)
(
)
(2 5λ) 3 / 1 2 2 65 . 0 1 2 1 2 1 + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = x q C x q x y C d 其中第一項為 Uniform delay,係在到達率為 q 之假設下,所產生之平均延 滯;而第二項則為到達率為 Poisson 分配時之額外的變動量,又稱為 Random delay;第三項為模擬而得之修正值。其理論基礎比較完整,故目前仍被廣 泛使用。其缺點在當x趨近 1 時,平均延滯(d)急速增加,乃因其假設系 統已在穩定狀態下,然此假設並不合乎實際路口的交通狀況。一般在應用 上,因第三項約為總平均延滯的 5-15%,所以多採用下列型式:(
)
(
)
(
)
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = x q x y C d 1 2 1 2 1 9 . 0 2 2 λ (3) Miller【16】應用 Wibster 的研究方法模式發展出來的,並未假定任何到達 分配或到達率,而以 I 值來表示車輛到達的狀況,分別計算紅燈時相的延滯 與綠燈時相的延滯。 當 x>0.5 時:(
) (
) (
)
(
)
(
s) ( )
y y I x q I x C d − ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ + − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − + − − = 1 /21 1 1 2 1 1 λ λ 當 x<0.5 時:E( )
q0 =0,則(
) (
) (
) ( )
y s y I C d − ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − + + − − = 1 λ 1 λ 1 /21 其在過飽和時(overflow)的平均車輛數估計為:( )
Q( ) (
Cs x)
x q(
x)
E ⎥ − ⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− − = 1 / / 1 3 4 exp 0.5 0 λ 將其應用於 Poisson arrival,則可得下式:(
)
{
(
[
(
[
)( ) (
(
)
]
)
]
)
[
(
)
]
}
y x q x x Cs C d − − − − + − − = 1 2 1 / / 1 3 / 4 exp 1 1 5 . 0 λ λ λ(4) Akcelik【18】於 1980 年所提出之延滯模式的理論基礎與 TRANSY6 相同, 係在 Webster 與過飽和直線延滯模式中間尋找一合適的曲線。 If x> x0
(
) (
)
(
) (
)
(
)
⎥⎦⎤ ⎢⎣ ⎡ − + − + − + − − =C1 2 /21 y T x 1 x 12 12 x x0 /QT /4 d λ Ifx< x0(
)
(
y)
C d − − = 1 2 1 λ 2 (5) 1985 年美國公路容量手冊(HCM)【11】中亦提出號誌路口車輛延滯之計算 公式:(
)
(
) (
)
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + − + − − = Q x x x x y C d 173* * 1 1 16 1 1 38 . 0 2 2 2 λ 本公式在估計每車平均之停等延滯,其中第一項為均勻延滯(uniform delay),第二項為考慮因溢流而變動的延滯量,稱為漸增延滯量(uniform delay)。其中 Q 為容量,此式在是估計每車的停等延滯,在0< x<1.0時合 理,但當x>1.2時便不適用。上述 HCM 延滯公式為假設車輛以隨機方式 (random arrival)到達路口,但大部分都市幹道的路口號誌皆有連鎖,亦即 將路口車輛到達狀態會受到上游路口號誌影響。而呈現車隊(platoon)到達 狀態,所以 HCM 依照各種不同的因素,如號誌種類、車道群種類、v c值 以及五種車輛到達路口狀態,分別制定其調整因子(platoon factor, PF),在 實際操作時將路口停等延滯算出後,選定適合路口狀態之調整因子,以作為 調整此路口實際停等延滯之「乘數」,相乘後得到更適合此路口的停等延滯 值。 (6) Akcelik Generalized【18】是一個整合 1985HCM 與澳洲、加拿大等延滯模式 的公式。其利用不同的校估係數以代表不同的模式:(
)
(
−−)
+ ⎢⎣⎡(
−) (
+ −)
+(
−)
⎥⎦⎤ = Tx x x m x x QT y C d 900 n 1 1 / 1 2 1 0 2 2 λ 其中x0 =a+bsG,a、b為常數,T 為流率 q 之時間長度 當T =0.25 n=2 m=4 時 則 為 HCM 之 公 式 ; 而 當n=0 m=12 67 . 0 = a b=1/600 時則為澳洲模式。此式的成因乃是上述模式具有共通 性、相似性,與早期所發展的模式大不相同。 (7) Akcelik Alternative HCM 是因 HCM 延滯高估了過飽和延滯,而且其差異會 隨x之增加而變大,所以 Akcelik 由上述之 Generalized Formula 中導出本式。(
) (
)
(
) (
)
(
)
⎥⎦⎤ ⎢⎣ ⎡ − + − + − + − − = C y x x x Q d 0.38 1 λ 2 /1 173 1 12 32 0.5 /此式在x<1時,非常接近 HCM 公式;而當x>1時又趨近於過飽和延滯直 線,因此可以解決 HCM 高估過飽和延滯的問題。 除上述模式外,尚有數種交叉路口號誌設計之電腦模擬套裝程式,如 SOAP, TRANSYT8,PASS-ERT,SIGOP,NETSIM 等,以不同係數代表不同延滯估計 方法。
2.2 車輛的路口行為特性
2.2.1 車輛到達路口分配
「車輛路口行為」為處理車輛問題時最初步的工作,不管是容量或延滯分 析,皆與車輛到達路口的行為有關。本節將以「延滯」為目標,探討車輛到達路 口呈現何種幾何分配,以及其對延滯的影響,以作為建立模式的依據。 交叉路口車輛延滯係由等後理論而來,故與車輛的達型態有密切的關係,車 輛到達型態有許多不同之假設與研究,大多數探討車輛到達型態、車輛到達數與 車輛到達間距等。 就車輛到達型態的假設分類,有下列幾種: (1) 均勻到達(Uniform Arrival)(2) 同時考慮均勻到達與隨機到達(Combined Uniform Arrivals and Random Arrivals) (3) 車隊到達(Platoon Arrivals) (4) 其他種類到達(Other Arrivals) 就車輛到達數分配而言,一般常使用的有卜瓦松(Poisson)分配、二項 (Binomial)分配與負二項(Binomial Negative)分配等。其中卜瓦松分配適用 於車流密度低(I =1)且車流不受干擾時;二項分配適於車流擁擠(I <1)時, 負二項分配則適用於車流到達差異很大(I >1),即車流因上游路口號誌影響而 呈現週期性變化時適用之。 就車輛到達間距分配方面,有耳朗(Erlang)分配、負指數分配(Exponetial negative)分配與轉移(Drift)負指數分配等,因車輛之有一最小間距,故轉移 指數分配比指數分配佳,而耳朗分配之彈性較大,可依車流型態之不同調整型態 參數k值。 車輛到達率為依時隨機變數,常符合某種機率分配,國外車流行為之研究 中,大都假設車輛到達型態為卜瓦松分配或是負二項分配。然而國內駕駛人之駕 駛習慣與國外駕駛人之駕駛型習慣不同,具有高度冒險精神,尤其大型車輛駕駛 與計程車駕駛更是明顯。因此,就國內車輛到達率分配,若以間距法加以配適, 則可能符合伽瑪分配、負指數分配、耳朗分配及對數常態分配等;若以計數法加 以配適,則有卜瓦松分配、二項分配與負二項分配等其適用特性亦不同【6】。
2.2.2 TRANSYT 模式計算車輛停止之原理
如果將路段上每一部停止車輛的 A 和 B 點,分別連接起來就會形成圖2-2中 等待車流(queue)三角形的兩個斜邊L( )
A 和L( )
B 。當越接近三角形頂點C時, 等待車流也開始移動,之後到達的車輛則不再完全停止,只是有不同速率的改變 而已。對車輛停止的計算,只考慮這些車輛是部分停止(Partially Stopped)。根 據TRRL的研究,這種較短時間的延誤(通常少於10秒鐘),可以很有效的以正常 車輛停止的百分比來表示。 在TRANSYT的等待車流模式(Queueing Model)中,假設所有車輛都駛過 整段的連線,然後在出口節點加入等候車流,換句話說,在TRANSYT中所有的 等待車輛不是從停止線開始往上游一路排上去(Spatial Queue),而是垂直的重 疊在停止線上(Vertical Queue)。因此,從圖中,可以計算出最大等待長度(Maxium Queue Length)等於在綠燈開始L 時間後在該點上與L( )
A L( )
B 間的距離。這種假 設在計算延誤和車輛停止以便於使用在最佳化程序上,並無不妥之處,只是用來 考慮等待車輛的動態特性時則不很恰當。從圖可看出,當我們考慮實際的等待車 流時(Spatial Queue),兩條斜線L( )
A 與L( )
B 交點C才是真正最大等待車流所後 延的上游點(Maximum Back of Queue)。圖 2-2 TRANSYT 中車輛停止之計算原理
2.3 車輛的紓解特性
車輛通過交叉路口時,車隊紓解的過程為交通工程的重要課題之一,因為它 是研究交叉路口飽和流量、駕駛人在路口的駕駛行為,以及交叉路口號誌時制設 計的基礎。當綠燈剛顯示時,在等候車隊之前幾輛車都需耗費若干時間來反應、 啟動與加速,以達到正常之行車速度,幾秒鐘後,停等的車隊即能(或多或少) 以幾近同一流率的速度駛離路口。一般在量測離開路口的速率的方法為,在時空 圖上,連接車輛停止的位置( A )和通過瓶頸路段( B )(Bottleneck;停止線)位置 (m) 時間 (sec) bottleneck 臨進速率 臨進速率 A B 的直線斜率(圖2-3)。而在TRANSYT的均勻延滯模式,它假設當車輛趨近於停 止線或等待車隊尾端時,該車是「瞬間停止」,而離開時是「瞬間離開」(圖2-4 所示), A 與 B 點的時間差即為均勻延誤du(也是停等延滯Stop Delay)。所以一 般在繪製時空圖時,都使用此方法,將曲線的地方模化成線性關係,以方便計算。 圖 2-3 一般紓解速率的時空示意圖 du 圖 2-4 TRANSYT-7F STOP 的計算方式
2.4 車隊時間延滯的計算方式【12】
2.4.1 時空圖(Time-Space Diagram)
常用來計算在車隊中的時間和行走距離的方法是時空圖法。圖2-5為車輛接近 車隊上游的軌跡圖,由圖可知,沿著車隊尾端軌跡的每一個點的斜率等於車輛在車隊尾端的瞬間速度,在上流自由速率區和車隊狀態間的虛線代表車輛在車隊尾 端的位置。所有車輛在車隊中使用的總時間為T 、所有車輛在車隊中所行走的Q 距離為D 。 Q Q T =長虛線間的面積 × 車流密度(d) (2-1) Q D =長虛線間的面積 × 車流量( f ) (2-2) 圖 2-5 車輛接近車隊上游的軌跡 另一個方法是考慮單一車輛N的軌跡(圖2-6),虛線是代表車輛期望的速度 或是自由車流速度的軌跡,粗實線是指車輛實際行駛的軌跡,在瓶頸路段裡,粗 實線和粗虛線的水平距離就是延滯,定義成w。從幾何學可以看出: Q f f Q Q d v v v d v d x x w ⎟⎟⋅ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − = − = ∴ 2 1 1 1 µ µ 因此 f Q v v w d 1 1 − = µ (2-3) f Q v v w t µ − = 1
(time in queue delay) (2-4)
因為t 和Q w的關係是指單一車輛,則所有車輛在車隊所使用的時間T 則會與總Q
f Q v v W T µ − = 1
(2-5) f Q Q v v W v T D 1 1 − = ⋅ = µ µ
(2-6) 所有從以上的方程式可知d 、Q t 、Q T 和Q D 皆與Q w和W有關。 圖 2-6 車輛真實且期望的軌跡 z 其中: BOQ :接近車隊尾端的點 µ :在車隊中容量 N :車輛 w :單一車輛在車隊中的延滯 W :所有車輛在車隊中的延滯 µ ν :車輛在車隊中的速度 f ν :車輛的自由速度 Q t :單一車輛在車隊中使用的時間 Q d :單一車輛在車隊中行走的距離 Q T :所有車輛在車隊中使用的總時間
Q D :所有車輛在車隊中所行走的距離
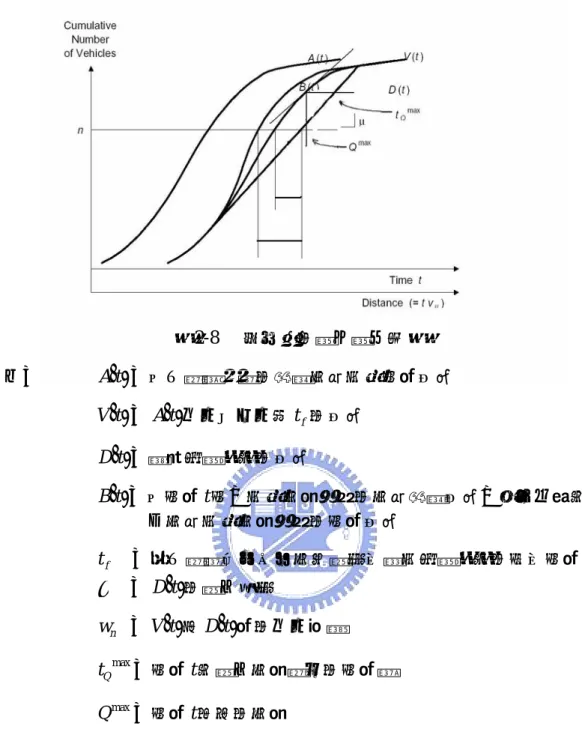
2.4.2 輸入與輸出(Input-Output Diagram)法
利用輸入與輸出圖法來計算車隊時間延滯時,首先需繪出最基本的輸入與輸 出圖,繪製的過程如下: (1) 先畫出每一車輛在上游觀察點的累積到達時間曲線A( )
t (2) 累積到達時間曲線水平向右移動t ,稱為曲線f V( )
t (3) 累積曲線繪製曲線D( )
t ,定義為每一車輛從瓶頸路段紓解的時間點;若已知 車輛數為n,則在V( )
t 和D( )
t 之間的水平距離為車輛的延滯值w 。利用方程n 式 2-4的關係式修正圖2-7後為圖2-8。此時可以定義每一車輛加入車隊尾端 的時間是藉由延伸每一輛車的延滯值。對所有車輛而言,這些點的軌跡就是 代表車隊尾端(back of queue)之曲線B( )
t ,明顯可之,B( )
t 和V( )
t 對車輛 是代表不同意義,故有車隊產生。從圖2-8可知曲線B( )
t 和D( )
t 的垂直距離 max Q 為時間 t 的車隊的長度,而曲線B( )
t 和D( )
t 水平距離為在車隊的總時 間,亦即車隊時間延滯值。 max Q 和 max Q t 的代數關係如下:max max Q t Q =µ⋅ 轉換成 ⇒ µ µ µ t v v Q dQ = ⋅ = Qmax⋅ max max 當移動D
( )
t 到與B( )
t 相切之處,此時為最大車隊發生的時間點。所有車輛在車隊 所使用的總時間為T 是每一個別車輛在車隊的時間的總和,即Q TQ =∑
tQ;而曲 線V( )
t 和D( )
t 之間的面積為總延滯值,曲線B( )
t 和D( )
t 間的面積即為車隊時間延 滯值。 圖 2-7 輸入輸出圖圖 2-8 修正過的輸入輸出法圖 其中: A
( )
t :在上游觀察點的累積車輛到達時間曲線( )
t V :A( )
t 水平向右平移t 的曲線 f( )
t D :離開瓶頸路段的曲線( )
t B :在時間 t 時,到達車隊尾端的車輛累積曲線,亦可以視為每 一車輛到達車隊尾端的時間曲線 f t :從上游點利用自由車流速率行駛到瓶頸路段的旅行時間 µ :D( )
t 的最大斜率 n w :V( )
t 和D( )
t 間的水平距離 max Q t :時間 t 為最大車隊發生的時間點 max Q :時間 t 長度的車隊2.5 文獻回顧評析
從上面的敘述可知,歷來的研究多著重於停等延滯的發展,較少在車隊時間 延滯上,僅在少數文獻上有此類的研究。在 2.4 節中,Dagonzo 學者所使用的計 算方式,僅適用於理想的狀態下,但在一般實際的道路交通型態上,並不能加以 應用。所以,本研究將研擬出適用於實際道路所發生延滯模式,並配合實際到路 調查,加以驗證。第三章 系統架構與模式建構
3.1 系統定義
交通工程上常利用交通號誌系統來規範車流的行進、停止與轉向,但號誌化 路口卻是造成干擾車流的主要地點之一,因而高效率的交叉路口運轉便十分重 要,延滯(delay)具有適當地反映各種不同運轉情況下實際車流移轉特性。一 般在推估延滯的方法常以停等延滯的模式為基礎,藉著使用轉換因子,將停等延 滯轉換成其他的延滯值,但因延滯受許多原因素影響,精確度的校估十分重要。 本章將探討利用車隊時間延滯推估的延滯模式,並以單一號誌控制路口為主。 車隊時間延滯係指一車輛從進入等候車隊開始,直到其離開瓶頸路段 (通常為停止線)為止的總時間。其可包括了旅行時間延滯(Travel Time Delay)、臨進路段延滯、停等延滯等。亦能包合各種延滯的特性,所以利用車隊 時間延滯推估的延滯模式會比一般使用停等延滯推估的延滯值精確度高。 影響路口車輛延滯的主要因素有(1)交叉路口幾何特性:如臨近路口路型、 車道數、左右轉專用道路、車道寬度、路邊停車、分隔島、槽化島等。(2)交通 號誌操作特性:如號誌種類、週期、時相等。(3)交通動態特性:交通量、飽和 流量、交通組成、轉向交通量、行人流量等。總言之,影響臨進路段延滯之變數 與因素眾多,有直接且固定的(如週期長度與交通量);也有間接但臨時性的(如 路邊停車、交通事故等)。本研究在延滯模式的推導中,僅考慮直接影響且易量 化的變數。 本研究假設獨立路口,且車種一致,交叉路口的幾何設計不變,所以影響車 隊時間延滯的因素在交通號誌操作特性方面,號誌種類、週期、時相;在交通動 態特性方面如車輛交通量、飽和流量、轉向交通量、行人流量、變換車道、車輛 的到達率、車輛的紓解率(消散速度)等。其中,由調查資料發現以交通號誌操 作和車輛的紓解率影響最大,本研究將從兩個變數出發,來建構車隊時間延滯模 式。3.2 車隊時間延滯車輛紓解速度的探討
一般繪製時空圖時,從停等時的位置,到通過瓶頸路段(通常為停止線), 會使用進入路段的臨進車流速率(Approach Speed),但實際上,車輛通過停止 線時的速度,有可能比臨進車流速率快,也可能和車流速率一樣,甚至比自由車 流速率慢。所以本節將就此觀點,對車輛紓解之速度作進行的討論。 如圖3-1,由車輛減速接近車隊到停止,或從靜止到加速離開停止線時,時 空圖上,加速度和減速度會呈現曲線,為了計算方便,一般都會假設當車輛趨近 於停止線或等待車流尾端時,該車是「瞬間停止」,而離開時是「瞬間離開」,此 時 A 與 B 點的時間差即為延滯。位置 (m) 時間 (sec) bottleneck 臨進速率 臨進速率 A B 圖 3-1 一般時空圖計算方法 在計算紓解速率時,通常使用的方式為停等位置和通過停止線位置的連線 (如圖3-2),或直接使用到達速率。但這與實際紓解速度會有過大誤差,對單一 獨立路口而言,影響或許不大,但對連鎖號誌路口來說,上游路口的紓解速率將 會成為下一路口的到達速率,如此,誤差將會增大,另外,就算紓解速率已知, 由於我們假設當車輛於趨近停止線或等待車流尾端時,該車是「瞬間停止」,而 離開時是「瞬間離開」,所以延伸已知的紓解速率線與停等位置的交點(C)也 會與實際停等的位置( D )有相當的誤差(圖3-2),本節以此為出發點,分別採 單階段與多階段的方式來模化紓解速率。 圖 3-2 一般紓解速率計算方式
位置 (m) 時間 (sec) bottleneck 臨進速率 自由速率Vf 實際紓解速度 V 造成啟動位置的變更C和D點 C D 到達下一路口的速率不同 圖 3-3 車輛啟動位置的變化圖
3.2.1 車輛的單階段紓解速率
由3.2節敘述可知,車輛從啟動位置到離開瓶頸路段,不外乎兩種方式,一 種是直接使用實際的紓解速率V 從啟動位置延伸出去(如圖3-4中的 B ),但此方 常不符合離開瓶頸路段的時間;另一種則是直接連接啟動位置和通過瓶頸路段位 置(如圖3-4中的C),此種方式不能反映在連鎖路口中,車輛的實際到達速率。 所以,此兩種方式皆易高估或低估延滯,為了修正此誤差,本研究假設從啟動位 置到瓶頸路段間,車輛使用等加速度a來行駛。 由於車輛在剛開始啟動時,會受到眾多因素(如對向車道的左轉車、橫向路 口未紓解完全的車流、未完全紓解的行人流、機車流和一些變換車道的車流)的 影響,所以剛開始啟動時速度會較慢,再以等加速度方式,逐漸加速,最後以速 度V 離開瓶頸路段(停止線)。位置 (m) 時間 (sec) bottleneck 臨 進 速 率 實 際 紓 解 速 度 V A B 通 過 瓶 頸 路 段 的 時 間 不 一 樣 C 位置 (m) 時間 (sec) bottleneck 臨進速率 實際紓解速度 V 等加速度 a L S A B 圖 3-4 使用加速度a之紓解圖 在已知啟動位置到停止線位置的距離 L,花費的時間為 t,初速度V ,加速度0 a, 利用牛頓運動定律得知: 2 0 2 1 at t V S = +
⇒
2 2 2 1 2 1 0 t at at L= ⋅ + = ⇒
22 t L a=
(3-1) 圖 3-5 單一階段紓解速率圖
從實際調查收集的資料得知車子啟動到離開瓶頸路段之各項參數值:加速度 a、距瓶頸路段 L 和啟動初速度V ,所以單一階段紓解速率可推得離開瓶頸路段0 的末速度V 和從啟動到離開瓶頸路段的時間 t 。依據這些資料,可繪出單一車輛f 在時空圖上的軌跡圖(圖3-5),其中末速度為V ,所花費的總時間為 t 。 f S a V V2 = 02+2⋅ ⋅ ⇒
Vf =0 +2⋅a⋅L 2 2 ⇒
Vf = 2⋅a⋅L
(3-2) 2 0 2 1 at t V S = +
⇒
2 2 1 0 a t L= + ⋅ ⇒
a L t = 2
(3-3)
3.2.2 車隊的單階段紓解速率
由3.2.1可得單一車輛的單階段紓解速率,假設此時的號誌時制已知,車輛是 隨機到達,且每一個號誌週期的車隊皆能完全紓解,。進而可以推得多車輛在車 隊中的紓解速率和其他各項參數(諸如車輛離開停線的末速度、各項延滯值等), 以及其間的關係。經由此車隊之每一車輛的軌跡圖,可以得知每一車輛的車隊時 間延滯和停等延滯,最後求得此週期全部到達車輛平均車隊時間延滯和平均停等 延滯。3.2.3 車隊二階紓解速率
在車隊中,有時因車流擁擠,車流的平均紓解速度很小,綠燈結束時,車隊 中還有部分車輛未能完全紓解,導致未在綠燈時間通過停止線的車輛,會多做一 次以上的停等。此種情形易發生在車流密度高、路段長度長且綠燈時間相對較短 (或紅燈時間相對較長)的號誌路口。當路口的號誌綠燈始亮時,車輛會以加速 度a啟動,但由於前方車輛的紓解率慢,造成所有車輛的紓解速率值降低,所以 車輛未到達停止線時,綠燈時間結束了,號誌紅燈亮時,車輛就要減速甚至煞停。 當車輛第一次停等完,以加速度a啟動離開,但遇到號誌變化,必須減速時, 本研究以鏡射的方式來探討此時的減速行為,所以假設車輛以加速度−a減速至 第二次的停等。因使用鏡射原理的關係,可推斷第一次加速和第一次減速所行駛 的距離是相等的。由上述可推得各項參數:距離瓶頸路段 L 、第二次車輛停等之 位置距離停止線L 、啟動初速度為∗ V 和加速度為0 a,所以可求算出末速度V 和∗ 從加速到減速之間的時間t : ∗(
)
2 0 V a V S = + ⋅位 置 ( m ) 時 間 ( s e c ) b o t t l e n e c k 第 一 階 段 停 等 第 二 階 段 停 等 實 際 紓 解 速 率 Vf 加 速 度 a 加 速 度−a L ∗ L ∗ t ⇒
(
) (
)
2 2 0 V a V L L + ⋅ = − ∗ ∗ ⇒(
)
a L L V ∗ ∗ = −(3-4) ⇒
(
2)
a L L t ∗ ∗ = −(3-5) 圖3-6 二階段紓解圖
第四章 資料調查整理與分析
本研究選定新竹市數個交叉路口,配合前章建構的延滯模式中之各項變數進 行延滯資料調查。調查時間每次為50分鐘(約含15-18個週期),每個路口攝影三 次,以增加調查資料的樣本數。4.1 調查計畫
4.1.1 調查目的
由實地調查之相關資料,可畫出每一車輛到達號誌路口的時空圖,進而計算 各項延滯值,再與實際測量之車輛延滯值做比較。4.1.2 調查方法
本研究所採用的調查法為路徑軌跡法,目的在登錄每一輛車在每一號誌週期 行進的路線軌跡圖,調查方式係以路口攝影方式來進行,將攝影機架設於調查路 口附近之制高點,取景範圍需涵蓋大部分臨近路段,調查時數約為五十分鐘左 右,拍攝完成後,再將DV錄影帶轉為一般影像檔(MPEG),以便室內讀取資料 之用。4.1.3 調查地點
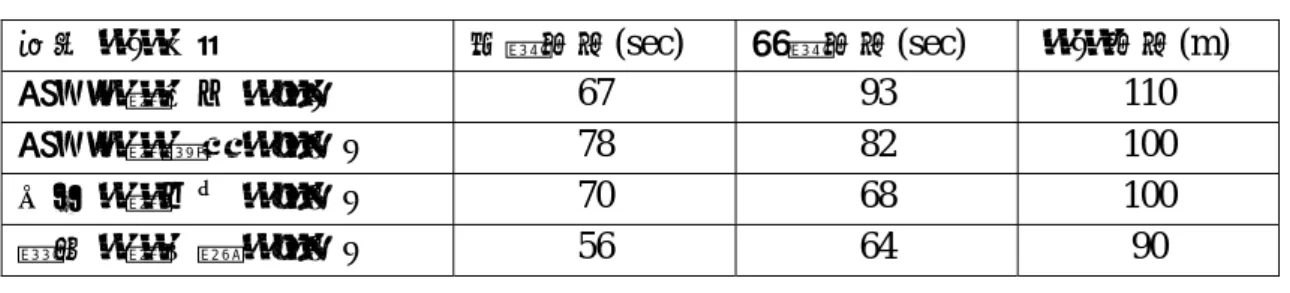
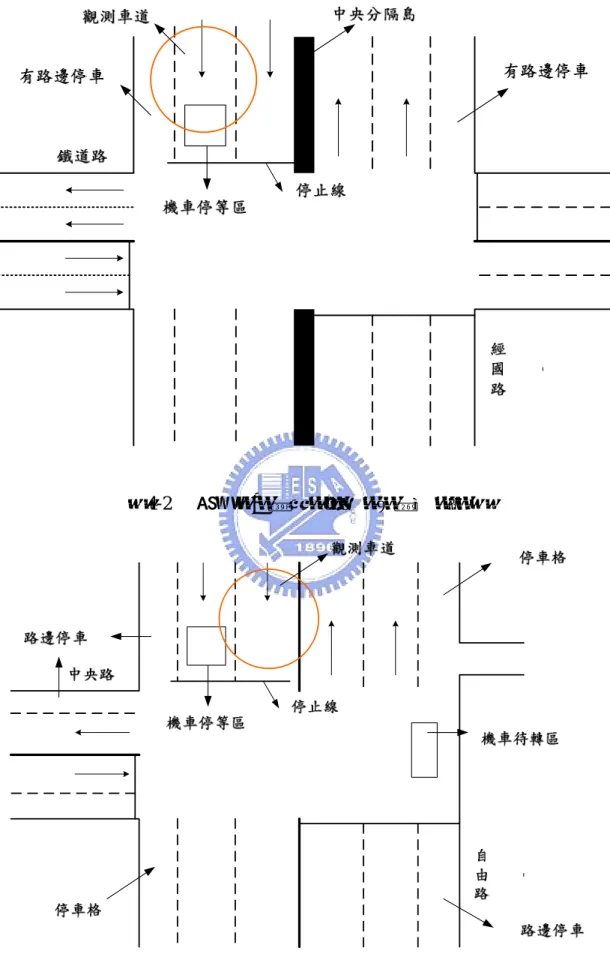
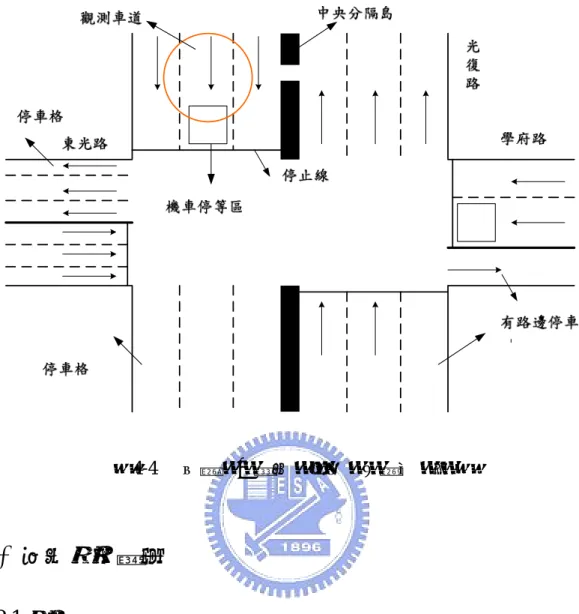
本研究調查地點之選擇係以下列原則來進行: (1) 選擇具有固定號誌時制,且車種較單純之交叉路口。 (2) 路口附近需有制高點,取景角度良好,以便進行拍攝。 (3) 路口不可有路燈或行道樹遮蔽或影響攝影角度。 (4) 在天候良好的環境下進行。 (5) 路口附近不可有建築工地或施工區域,以免妨礙車輛行進或到達型態。 由於本研究以新竹市轄區路口為研究範圍,經過初步踏勘後,選定經國路與 西大路交口、經國路與鐵道路交叉口、自由路與中央路交叉口、學府路與光復路 交叉口為調查對象。以上路口皆設有天橋供行人通行之用,因此調查時可以將攝 影架設在天橋上,以利拍攝。 各調查路口之號誌時制及路口幾何圖形如表4-1及圖4-1到4-4所示。表 4-1 調查路口之路口條件表 調查路口名稱 紅燈長度(sec) 綠燈長度(sec) 路口長度(m) 經國路與西大路交口 67 93 110 經國路與鐵道路交叉口 78 82 100 自由路與中央路交叉口 70 68 100 學府路與光復路交叉口 56 64 90 單位:秒(sec)、公尺(m) 註:黃燈時間納入綠燈時間,全紅時間視為紅燈時間 圖 4-1 經國路、西大路交叉路口幾何路型
圖 4-2 經國路、鐵道路交叉路口幾何路型圖
圖 4-4 光復路、學府路交叉路口幾何路型圖
4.2 調查資料整理
4.2.1 資料收集
由攝影調查所得之資料中,紀錄所需之資料項目,包括: 1. 號誌時制:調查時段內臨近路段之號誌週期長度、時相長度(即綠燈時間加 上黃燈時間)、紅燈時間。 2. 車輛到達的時間:以車道為基礎,紀錄臨進路段每一車道上汽車到達路口觀 測點(大約從停止線往後90公尺)之時間。 3. 車輛的行進軌跡:利用觀測錄影帶的時間碼,以兩秒為一單位時階,記錄每 兩秒鐘車輛所動的位置,進而取得車輛的路徑軌跡圖。 4. 車輛紓解之時間:以個別車道為基礎,紀錄臨進路段每一車道上每一輛汽車 離開停止線之時間。 5. 停等車隊的位置:在每一紅燈時設內,記錄每一車隊中的每一車輛在車隊中 的位置座標。4.2.2 資料整理方法
觀看攝影的錄影帶時,可以發現許多實際會發生的狀態,例如超車、變換車 道等多數不確定因素,所以在選取每一號誌週期數據時,需考慮下列幾點: 1. 選取一直行車道,此車道車輛皆為直行車。 2. 如果車隊長度超過路段上游觀察點時,超過該點之後的車隊不予考慮。 3. 含有超車過三輛以上大型車的週期不予考慮。 4. 在大型車後的車隊因觀察不易,誤差值過大,故不予考慮。 5. 車輛進入上游觀察點時位於非觀測的車道,但在路段中變換車道到所觀測的 車道時,此情形列入樣本中。
4.2.3 資料之彙整
在經國路與西大路交口,此路段的車流車種較一致,大型車輛較少,視線良 好,為一良好的觀測取樣點。而在經國路與鐵道路交口,此路段接近省道,大型 車(巴士、聯結車、卡車)數量多,因此在取樣上,若一個週期裡包含超過 3 輛大型車時時,該週期所有資料不予考慮。自由路與中央路交口,自由路為一車 道寬廣的道路,天橋高度夠高,視野良好,附近完全沒有遮蔽物,車種相當一致, 大型車輛甚少,因臨近學校區域,交通狀況良好,為一個適合調查的觀測點。在 光復路與學府路交口,此路口的車流量很大,臨近交流道附近,大型客車較多, 容易影響觀測視線,惟此路段的觀察點很清晰,稍可解決視線障礙方面的問題。 表 4-2 各調查路口的停等延滯值和車隊時間延滯值 經國路與西大路交口 經國路與鐵道路交口 自由路與中央路交口 光復路與學府路交口 停等延滯 42.85 53.37 39.46 53.49 車隊時間延滯 48.99 63.77 53.39 62.74 單位:秒(sec) 由上述之調查統計資料可推測每一車輛在車隊的位置所對應的加速度(表 4-3)。從統計資料可得知剛開始週期綠燈亮時,第一部車會直接往前衝,所以速 度會比較快,第四部車後,車流漸漸穩定紓解,車輛大都保持差不多的加速度。 表 4-3 車輛在車隊裡對應的加速度 車序 第(i)輛 第一部 第二部 第三部 第四部 第五部 第六部 第七部 第八部 第九部 第十部 平均值 2.22 1.60 1.51 1.28 1.27 1.18 1.16 1.09 0.91 0.84 單位:公尺/秒2 (m/s2 )加速度與車序關係圖 0.00 0.50 1.00 1.50 2.00 2.50 1 2 3 4 5 6 7 8 9 10 車序(i) 加速度(m/s^2) 平均值 車序與車輛位置關係圖 0.00 20.00 40.00 60.00 80.00 100.00 1 2 3 4 5 6 7 8 9 10 11 車輛序(第i輛) 車輛 位置( m ) 平均值 圖 4-5 加速度與車序關係圖 我們亦可以從許多資料推算出每一車隊中,每一車隊的車序到達停止線的距 離L (車隊中的第一部車稱i L1,第二部車稱為L2……以此類推)。 表 4-4 車輛在車隊中的位置 車序 (第 i 輛) 第一部 第二部 第三部 第四部 第五部 第六部 第七部 第八部 第九部 第十部 平均值 19.46 28.03 36.01 43.76 51.33 60.61 70.47 79.33 83.13 87.57 單位:公尺(m) 圖 4-6 車序與車輛位置關係圖
第五章 模式驗證與範例分析
5.1 模式模擬驗證
本章針對第三章的所導出的紓解型式所產生不同情形的延滯模式,配合第四章 各路口調查延滯之值來對模式進行驗證,以檢驗模式之正確性及適用性。本研究在 作業系統 Window XP 上用 JAVA 來撰寫模擬程式,以電腦模擬產生車輛的方式來驗 證模式並計算不同情況之下的車輛延滯值。5.1.1 程式的撰寫
模擬程式分成六個部分(如圖 5-1),以下說明程式的參數值、各種參數的定義, 以及程式的流程。 1. 隨機產生車輛 本研究採用卜瓦松(Possion)分配,第一個產出者時間T ,由於電腦隨機產出1 的是間隔到達時間(inter-arrival times) t ,故下一個時間點T2 =T1+t;隨機產 生車輛時間點的通式為: t T Ti = i−1+ 其中T =第 i 車輛產生的時間點,i t =電腦隨機產生出的間隔到達時間 2. 進入系統的速度 假設個別車輛產生後,皆具有初速度V ,除了發生必須停止的事件,否則直到i 通過停止線為止,其皆保持相同的速度V ,通式為: i T V L= i* 其中 L =車輛所行駛的距離,V =車輛進入觀測點的初速度, T =車輛行駛所i 需要的時間。 3. 判斷前方是否有車輛 讀取前方車輛在時間 't 時的位置Xi−1與在時間 't 時位置X 間的距離差值 d ,如i 果 d 值大於等於 D 值時,判定前方無車輛;如果 d 值小於 D 值時,判定前方有 車輛, D 值可以自訂,視駕駛人的駕駛行為而定,通式為: D d≥ 前方無車輛,可以通行 D d< 前方有車輛,必須停等31
G
R
G
R
G
∗ 1t
t
2∗t
3∗t
4∗ ∗ 5t
t
6∗x
x
∗ 7t
預設電腦隨機值 d ,d =3~10公尺。 4. 判定是否遇到紅燈 本研究假設紅燈時間為 R 、綠燈時間為 G ,黃燈時間併在綠燈時間內計算,假 設在任何時間t 須判定是否為紅燈或綠燈,同時設 x 為週期數。本程式的號誌∗ 時制設定起始為紅燈或綠燈開始點,其判斷方式分成三個部分: 假設此週期從綠燈開始: 第一個部分如圖 5-2 的 t 和1∗ ∗ 2 t :(
+)
<0 − ∗ R G t ⇒ 若G−t∗ ≥0 ⇒ 綠燈 若G−t∗ <0 ⇒ 紅燈 第二個部分如圖 5-2 的 t :3∗(
+)
=0 − ∗ R G t ⇒ 紅燈 第三個部分如圖 5-2 t 、4∗ ∗ 5 t 、t 和6∗ ∗ 7 t :(
+)
>0 − ∗ xG R t ⇒ 求出號誌週期數 x 取 x 值會使t∗ −x(
G+R)
最接近 0(
G R)
Y x t∗− + = ⇒ 若Y =G+R ⇒ 紅燈 若Y <G+R ⇒ 若G− Y ≥0 ⇒ 綠燈 ⇒ 若G− Y <0 ⇒ 紅燈 圖 5-2 紅綠燈停等判斷圖5. 第一階段停等 當判定前方有車輛且車間距離小於 d 或遇到紅燈時,車輛會煞停。當號誌轉變 為綠燈且前車由停止狀態開始紓解時,車輛會以等加速度的方式離開停止線。 此時車輛的初速度V0 =0,利用讀取前車位置Xi−1與本車位置X ,可以得i d L Li = i−1+ 。由此項資訊可得車輛在任一時間 't 與停止線的距離,再讀取加速 度 a 值資料庫(利用第四章的資料收集統計而得)。之後利用公式 3-2 和 3-3 計 算得通過臨進路段所花費的時間與通過停止線時的末速度V ,進而描繪出時空f 圖。 6. 二階段停等 第二次的停等模式與第一次停等模式大致類似,車輛在第一次停等結束後,準 備以加速度 a 離開停止線,但由於受到其他因素(諸如號誌轉變為紅燈、前方 車輛剎停)的干擾,迫使後車輛必須減速,進行第二次的停等,此時採用減速 度 a− ,再配合第三章的方程式(公式 3-4 和公式 3-5)得到時間和末速度V 。 f 7. 多階段停等 車輛在停等時,號誌時制轉變或者是前方車流紓解啟動,車輛就會開始移動, 一旦前方車輛停等,後車就要減速煞停,如果車流量大,前車將會走走停停, 就會發生多階段停等了。多階段停等延續二階段停等,採用加速度 a ,減速度 a − 。 z 符號說明: i =進入參考線的順序(i=1為進入參考線的第一輛車) t =隨機產生的間隔到達時間 i T =第 i 輛車在位置X 時的時間 i i V =車輛進入系統的速度 T =進入系統到離開停止線所使用的時間 i X =車頭第 i 輛車的位置 d =位置X 與i Xi−1的距離差值 D =駕駛人的開車習慣 G =綠燈時間長度 R =紅燈時間長度 x =週期數 i L =第 i 輛車距停止線的距離 f V =離開停止線的末速度
33 隨機產生間隔到達時間 以 的速度進入系統 判斷前方是否有 車輛 做第一階段停等 判斷是否遇到 紅燈 是 否 判斷是否遇到紅 燈 是 否 以 的速度離 開系統 是 以 的速度離開系統 否 做多階段停等 以 的速度離開系統 f
V
fV
0 V 0 V 是 判斷程式是否結束 ( 模擬時間或車輛 ) 數 程式模擬結束 否 是 1 + = i i 輸出統 計資料 模擬程式開始 圖 5-1 程式的流程圖5.1.2 模擬調查路口範例
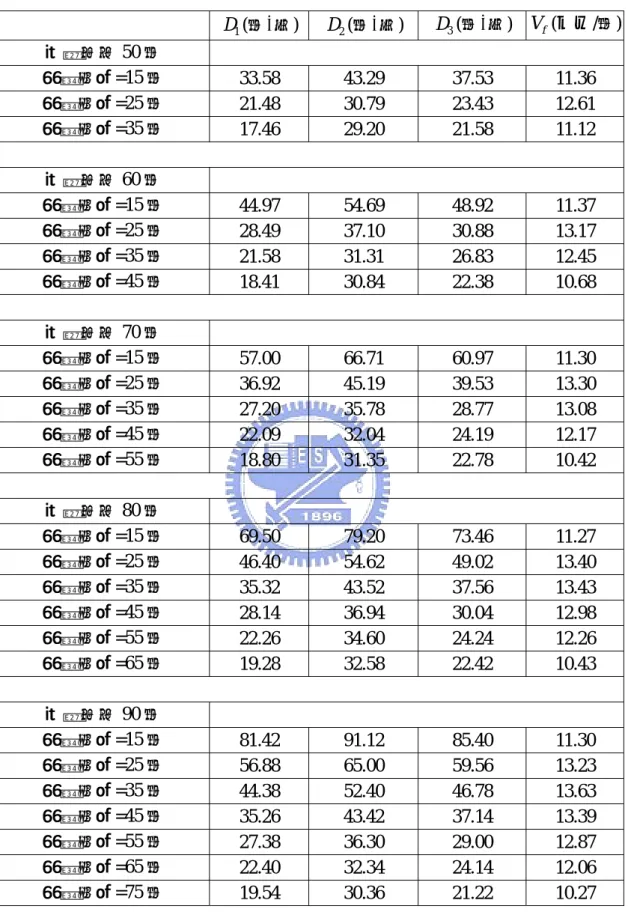
模擬程式設定初速度Vi=10公尺/秒(i=1,2...),時間間隔dt=100毫秒,λ為 隨機產生間隔到達時間的參數值(λ=車/時)。經國路與西大路交叉口l =110公尺、 28 . 0 = λ ,經國路與鐵道路交叉口l=100公尺、λ=0.42,自由路與中央路交叉口 100 = l 公尺、λ =0.14,光復路與學府路交叉口L=90公尺、λ =0.28,路口號誌週 期設定從紅燈開始。在計算平均路口停等延滯時,為了要與調查值做比較,程式只 計算有停等的車輛,直接通過路口的車輛則不予計算;在計算車隊時間延滯時,也 是只計算有停等的車輛,而在計算路口延滯時,則是總延滯值除以所有通過路口的 車輛數,也就是說所有通過路口的車輛皆計算。表 5-1 為各路口的調查延滯值和程 式模擬後的延滯值之比較。 表 5-1 各調查路口的延滯值和程式模擬後的延滯值 經國路與西大路交口 經國路與鐵道路交口 自由路與中央路交口 光復路與學府路交口 停等延滯 42.85 53.37 39.46 53.49 車隊時間延滯 48.99 63.77 53.39 62.74 模擬的延滯值 停等延滯 44.10 54.10 40.21 49.32 車隊時間延滯 51.30 62.30 52.60 58.40 路口延滯 45.10 55.60 47.20 49.70 停等延滯差值百分比(%) 2.83% 1.35% 1.87% -8.46% 車隊時間延滯差值百分比(%) 4.50% -2.36% -1.50% -7.43% 單位:秒(sec) 從表 5-1 發現模擬的各項延滯值與實際路口調查的延滯值差距在±10%之內, 除了光復路與學府路交口有較大的差距之外,其餘的路口差值都在±5%之內,顯示 本程式所模擬的延滯值與實際調查的延滯值數值接近。圖 5-2~圖 5-4 為調查路口的 車輛模擬軌跡圖。經國路與西大路交叉口模擬 0 20 40 60 80 100 1 180 359 538 717 896 1075 1254 1433 1612 1791 1970 2149 2328 時間(1/10秒) 位置(公尺) 車輛一 車輛二 車輛三 車輛四 車輛五 車輛六 車輛七 車輛八 車輛九 車輛十 車輛十一 車輛十二 車輛十三 車輛十四 車輛十五 車輛十六 車輛十七 車輛十八 車輛十九 圖 5-2 經國路與西大路交口車輛模擬軌跡圖