國立交通大學土木工程研究所
博士論文
嵌入引潮力與溫度的類神經-模糊潮汐推算模式
An adaptive neuro-fuzzy method associated with tide generating
forces and sea surface temperature for tidal prediction
指導教授:張憲國博士 研究生:林立青
嵌入引潮力與溫度的類神經-模糊潮汐推算模式
摘要 本文主要探討引潮勢能與海溫參數對潮汐水位的影響,並應用類神 經網路與適應性之模糊推算系統,架構潮汐水位推算模式。本文建構 兩個水位推算模式,一為利用太陽及月亮與地球上對應測點之相對位 置與距離等參數,輸入神經網路來建立以推算潮汐水位之模式為 TGF-NN。另一為以海溫及引潮位勢進行類神經-模糊網路之架構是為 TGFT-FN。 本文之 TGF-NN 模式與調和分析法、正交潮法及 NAO.99b 模式進 行單一測站長時間推算水位之比較。本模式除了可應用於單點的潮位 推算,亦應用其他測站的水位計算,說明本模式於工程應用上的實用 性與精確性,推算之精度略優於NAO.99b 模式。另外,嵌入海溫與引 潮勢能之TGFT-FN 模式,與引潮勢能之水位推算模式比較,TGFT-FN 較 TGF-NN 模式於東部海域可修正方均根誤差約 5 公分,於西南海域 則約可修正2 公分;於西北海域兩模式之誤差接近。An adaptive neuro-fuzzy method associated
with tide generating forces and sea surface
temperature for tidal prediction
ABSTRACT
The aim of this paper is to clarify how tide generating forces (TGF) and sea surface temperature (SST) affect the water level. This paper also uses back-propagation neural network (BPN) and adaptive network-based fuzzy inference system (ANFIS) to construct the tide predicting models. This study presents a neural network model, called TGF-NN, of simulating tides at multi points considering tide generating forces. The other model, called TGFT-FN, embedded tide generating forces and sea surface temperature is to calculate tides.
A comparison on the root mean square and correlation coefficient of three year mixed tides at a single point computed with harmonic method, response-orthotide method, the NAO.99b model and the TGF-NN model was made to show the prediction accuracy of each method. This model is shown to be efficient as the harmonic method to estimate ocean tides at a single point. Extended application of this model to predicting tides at some points neighboring to an original interest point identifies accurately simulating multi-point tides as the NAO.99b numerical model. Furthermore, the difference of the model combined SST and TGF parameters and the TGF-NN model in eastern coast of Taiwan is about 5 cm, in southwestern coast is about 2 cm, and in northwestern coast is almost the same.
目錄
中文摘要………i 英文摘要………...……ii 圖目錄………..….v 表目錄………...vii 符號說明………viii 第一章 緒論... 1 1-1 研究動機與目的... 1 1-2 文獻回顧... 3 1-3 文章架構... 8 第二章 潮汐特性分析... 10 第三章 引潮勢能理論、類神經及模糊模式... 15 3-1 引潮勢能理論... 15 3-2 類神經網路模式... 21 3-3 類神經-模糊推論模式 ... 23 第四章 引潮位勢神經網路模式... 28 4-1 引潮勢能之類神經模式... 28 4-2 模式之驗證分析... 29 第五章 嵌入海溫及引潮位勢之模糊-神經網路模式 ... 40 5-1 海溫對長週期水位的影響... 405-2 嵌入海溫及引潮位勢水位模式之驗證 ... 46 第六章 結論... 58 參考文獻... 61
圖目錄
圖2-1 測站位置及周圍海域海底地形圖 ... 13 圖2-2 台灣各測站之潮型與平均潮差 ... 13 圖2-3 歐氏距離的空間表示 ... 14 圖2-4 台灣周圍潮汐水位特性分類之群集分析圖 ... 14 圖3-1 月球對地表水體引潮力示意圖 ... 15 圖3-2 地球與黃道、白道示意圖 ... 18 圖3-3 花蓮 2001 年 1 月之引力勢能推算潮位 ... 20 圖3-4 花蓮 2001 年 1 月實測潮位 ... 20 圖3-5 類神經網路架構示意圖 ... 21 圖3-6 模糊邏輯推論示意圖 ... 26 圖3-7 適應性網路架構模糊推論系統架構示意圖(Jang,1993) ... 27 圖4-1 太陽、月球與相對地球之角度示意圖 ... 28 圖4-2 TGF-NN 模式與調和分析法與實測資料之每月方均根誤差比較 ... 31 圖4-3 2001 年 1 月之實測與 TGF-NN 模式之水位比較... 32 圖4-4 2002 年 1 月之實測與 TGF-NN 模式之水位比較... 32 圖 4-5 2001 年之實測與 TGF-NN 模式水位的相關性比較... 33 圖 4-6 2002 年之實測與 TGF-NN 模式水位的相關性比較... 33 圖 5-1 2001-2002 年之水位與海溫月移動平均之變化圖... 42 圖 5-2 花蓮與頭城之實測水位月移動平均(2001-2002) ... 42 圖 5-3 花蓮與蘇澳之實測水位月移動平均(2001-2002) ... 43 圖 5-4 花蓮與成功之實測水位月移動平均(2001-2002) ... 43 圖5-5 花蓮與蘭嶼之實測水位月移動平均(2001-2002) ... 43 圖5-6 花蓮與新竹之實測水位月移動平均(2001-2002) ... 44圖5-7 花蓮與台北之實測水位月移動平均(2001-2002) ... 44 圖5-8 花蓮與竹圍之實測水位月移動平均(2001-2002) ... 44 圖5-9 花蓮與台中之實測水位月移動平均(2001-2002) ... 45 圖5-10 花蓮與高雄之實測水位月移動平均(2001-2002) ... 45 圖5-11 花蓮與恆春之實測水位月移動平均(2001-2002) ... 45 圖5-12 花蓮實測水位與推算水位之月移動平均(2001-2002) ... 47 圖5-13 花蓮推算水位與頭城實測水位之月移動平均(2001-2002) ... 47 圖5-14 花蓮推算水位與蘇澳實測水位之月移動平均(2001-2002) ... 47 圖5-15 花蓮推算水位與成功實測水位之月移動平均(2001-2002) ... 48 圖5-16 花蓮推算水位與蘭嶼實測水位之月移動平均(2001-2002) ... 48 圖5-17 花蓮推算水位與新竹實測水位之月移動平均(2001-2002) ... 48 圖5-18 花蓮推算水位與台北實測水位之月移動平均(2001-2002) ... 49 圖5-19 花蓮推算水位與竹圍實測水位之月移動平均(2001-2002) ... 49 圖5-20 花蓮推算水位與台中實測水位之月移動平均(2001-2002) ... 49 圖5-21 花蓮推算水位與高雄實測水位之月移動平均(2001-2002) ... 50 圖5-22 花蓮推算水位與恆春實測水位之月移動平均(2001-2002) ... 50 圖5-23 嵌入引潮力與海溫之潮汐模式推算架構圖 ... 50 圖5-24 花蓮測站 2001 年水位機率分布圖 ... 51 圖5-25 2001 年之實測與 TGFT-FN 模式水位的相關性比較 ... 54 圖5-26 2002 年之實測與 TGFT-FN 模式水位的相關性比較 ... 54
表目錄
表1-1 各模式之特性比較 ... 7 表4-1 TGF-NN 模式與調和分析法之比較... 31 表4-2 花蓮 TGF-NN 模式及各模式與實測資料之比較... 34 表4-3 東部地區不同模式與實測資料之推算結果 ... 35 表4-4 西北部地區不同模式與實測資料之推算結果 ... 37 表4-5 不同統計時間之平均水位修正模式潮位結果(單位:公分) ... 38 表4-6 東北及西南部地區不同模式與實測資料之推算結果 ... 39 表5-1 花蓮與其他測站實測長周期水位與海溫的相關性 ... 42 表5-2 花蓮 ANFIS 推算值與其他測站長周期水位的相關性... 46 表5-3 東部地區不同模式與實測資料之推算結果 ... 53 表5-4 東部地區不同模式與實測資料之相對誤差分析 ... 53 表5-5 西北部地區不同模式與實測資料之推算結果 ... 55 表5-6 西北部地區不同模式與實測資料之相對誤差分析 ... 56 表5-7 西南部地區不同模式與實測資料之推算結果 ... 57 表5-8 西南部地區不同模式與實測資料之相對誤差分析 ... 57符號說明表
a1 隱藏層之推算矩陣 a2 輸出層之推算矩陣 b1 輸入層與隱藏層間的閥值矩陣 b2 隱藏層與輸出層間的閥值矩陣 ai、bi、ci 前項參數(premise parameters)d2AB 歐氏距離平方值(squared Euclidean distance)
e 網路誤差向量 f1、f2 轉換函數 g 重力加速度 h 自Γ點所計算的太陽平均經度 i 鐘形歸屬函數的數量 下標m 表示月球 na 隱藏層神經元個數 nb 輸出層神經元個數 p 自Γ’計算的月球近地點的平均經度 ps 自Γ’計算的太陽近地點的平均經度 pi、qi、ri 後置參數(consequent parameters) s 自Γ’計算的月球平均經度 下標s 表示太陽 x 輸入值 CE 相關性,Correction coefficient D 月球中心與地球中心距離 m D 地月平均距離,約為 3.8×105km
m D 地月瞬時距離 s D 地日平均距離,約為 1.5×108km s D 地日瞬時距離 E 誤差函數 Err(%) 相對誤差百分比 F 法國制潮型值 Fa 月球對 X 點之引力 Fc X 點運動離心力 G 萬有引力,約為 6.67×10-11Nm/Kg2 I 單位向量 IW 輸入層與隱藏層間的權重矩陣 J Jacobian 矩陣,為網路誤差與權重值和閥值的一階微分 LW 隱藏層與輸出層間的權重矩陣 M 月球的質量
MTR 平均潮差(mean tidal range)
N 自Γ所計算的月球升交點的平均經度 P 網路輸入變數矩陣 R 地球半徑,約為 6.371×103Km R2 相關係數之平方值 RMS 方均根誤差 T J2000.0 系統之儒略世紀數 X 地球上之水體觀測點 Xk、Xk+1 分別表示每次疊代權重與閥值 Y 學習目標值 β X 點至月球中心至地心之連線的夾角,∠XMcEc
γ X 點之徑向向量與 X 點至月球中心 Mc之夾角,等於 θ+β θ X 點至地心至月球中心之連線的夾角,∠XEcMc η 引潮勢能所造成之水位變化 ηe 受日、月影響的潮汐水位 ηo 實測水位值 ηp 推算水位值 μAi (x) 鐘形歸屬函數
ξ
月球中心至 X 點之距離 φ 日、月與地球之相對角度φ
X 點水體所受之引潮位勢φ
a 月球對地球之引潮位勢φ
c 共同旋轉離心力之引潮位勢 Γ 黃道與赤道之交點,亦稱為春分點 Γ’ 輔助春交點 Ω 黃道與白道的交點,亦稱為升交點第一章
緒論
1-1 研究動機與目的 中國古書有云;「大海之水,朝生為潮,夕生為汐」。Pytheas(325.BC) 和Posidonius(135-50.BC),藉由觀察潮汐之大小潮變化,發現其週期與 月球及太陽週期有某種程度的相關性。東漢王充於永元二年(90),在 “論衡"之書虛篇「濤之起也,隨月盛衰,大小滿損不同齊」,史上第 一次指出月的圓缺變化為潮汐大小潮的成因。唐竇叔蒙寶應至大曆年 間(762-779),所書之“海濤志"為最早的潮汐專書,其中「潮汐做濤, 必符於月」;「一晦一明,再潮再汐」;「一朔一望,載盈載虛」;「一春 一秋,再漲再縮」,說明潮汐之日、月及年週期現象。並最早利用天文 曆法求出兩次高潮時間間隔為12 小時 25 分 14.02 秒,相當接近現在的 數值 12 小時 25 分。其亦繪制“濤時推算圖"以農曆的日期就可查表 得到理論的潮汐水位高度,這是史上第一本潮汐表。北宋肅燕天聖四 年(1026)對海潮進行 10 年的觀察,繪制“海潮圖"為當時的漁業生產 與水上交通提供可靠的資訊,並促進其發展。 潮汐由最早的觀測獲得相關理論的結果,到後來潮汐成因的釐清, 最後由理論及實際潮汐表的應用,顯示海潮的科學發展與實際應用有 密不可分的關係。海洋中的潮汐現象為海水受到日、月對地球之引潮 力作用,使水表面產生規律的升降運動。潮汐的變動受到引潮力作用, 稱之為天文潮;另外,太陽輻射則會造成氣象的週期性變動,並間接 影響水位,稱之為太陽輻射潮。前者於實際潮汐上占有較大的成分, 而後者較小於前者的變化。但是太陽輻射潮為造成海面年際週期性變 動的主要因素,另外,如風、氣壓等氣象因子的變化亦會引起水位升 降的變化。全球潮波的傳遞於各大洋間,在引潮力的作用下,由於海底盆地地形及摩擦力與潮波的交互作用,加上柯氏力(Coriolis force)的 影響,產生旋轉潮波系統,淺水潮分量的數目無法精確的估算,對於 此種非線性效應可用混沌的行為來解釋(Frison,1999)。潮汐波由深海傳 遞至陸棚進入淺水區後,波速變慢及能量密度變大使潮差產生較大的 變化,若潮波之波長接近 1/4 倍的港灣形狀長度時,則會產生共振現 象,而潮差則變大。海岸亦會反射潮汐波使其於高潮時產生更高的潮 位。因此,綜合上述複雜因素,近海潮汐的大小及發生時間較不能精 確的計算,需輔以觀測潮汐資料的分析,於海岸工程上才能進行近岸 潮汐的推算。 又潮汐之水位升降運動對於現代海岸活動、海岸結構的設計高程及 海港船隻進出安全有相當影響。近年來海岸生態工程的進行,常需考 慮潮間帶區域之生態性,不同的潮汐水位會有不同的生態特性。 Cochran(2004)於科學(Science)期刊中,以潮汐壓力與地震數據進行統計 分析,提出地震發生時潮汐對斷層面的壓力有較高的相關性,而且地 震發生的時間也會依因潮汐造成的壓力而提前或推遲。由於潮汐現象 的成因與理論,已有顯著的發展及了解。因此,本文論述的重點將以 天文引力及海溫年際變化的現象做為兩個主要的因素,來探討與估算 實際潮汐水位中上述兩者影響分量之佔有成分,並應用模糊-神經網路 系統建立水位推算模式,以期能對近海區域水位訊號區域進行較精確 的水位推算,以期可解決工程應用上缺乏實測潮汐資料以分析潮汐特 性之問題,本模式於工程上之應用頗為實際及重要。
1-2 文獻回顧 Newton(1687)年首先提出平衡潮學說,以萬有引力解釋地球潮汐的 現象,在理想的條件下,天體引力與地球自轉會使地球水體表面產生 平衡潮面,並指出潮差的大小與與天體的質量成正比,與天體到地球 的距離三次方成反比。由此說明月球引潮力約為太陽引潮力的2.1 倍, 月球對地球的引潮力為潮汐形成的主要因素,而該潮汐理論屬於靜力 潮理論。Laplace(1775)首先提出潮汐動力學理論,並進行全球海洋進行 潮汐水位的計算。以此理論為基礎,Airy(1842)等亦推算全球之潮汐分 布情形,對於全球潮汐的作用及產生有深入的瞭解。 Darwin(1907)以調和分析法(harmonic analysis)對平衡潮進行調和展 開,並求得到分潮之頻率,共有63 個。Doodson(1921)進一步對月球及 太陽的引潮勢能展開成調合分潮,使其展開的結果更為精確,其展開 之分潮數有 386 個。應用實測潮汐水位訊號的潮汐分析方法有以下三 種方法,首先最小二乘法(least square analysis) (Godin,1972),依資料之 長度之不同,求取之各分潮振幅及相位角,分潮個數的選擇亦有所不 同,一般以 365 天之每時水位紀錄需 20 至 30 個分潮,才能滿足相近 分潮頻率的分離,此法假定潮汐水位為天文潮各種分量的線性疊加, 並加以計算其各分潮之振幅及相位角。Le Provost et al. (1998) 則使用 26 個分潮於數值模式中進行潮位預測分析,對於預測結果之誤差隨時 間有較穩定的變化。 再者,Godin(1972)提出傅利葉分析法(Fourier analysis),將實測潮 汐水位作區間[-N,N]之傅利葉級數展開,展開的每一項級數稱為傅氏分 潮,其與引潮勢展開的分潮頻率不同,傅氏分潮之頻率及角速度為 n 倍數增加,引潮勢之分潮頻率則各自獨立。此法亦可檢驗調和分析中 可能遺漏的分潮,如淺水分潮。
最 後 ,Munk 和 Cartwright (1966) 提 出 潮 汐 響 應 法 (response analysis),此法不必預先規定存在何種頻率的振動,即能客觀的分析出 各種可能的振動頻率,可將頻率相同而來源不同的振動行為分離。潮 汐響應法經 Groves and Reynolds(1975)改進後,成為正交潮響應法 (response-orthotide method),正交潮響應法之優點可以行少量參數來定 義平滑的潮位導納(tidal admittance),而潮位導納為潮位能譜與天文變 量能譜的比值,並由潮位導納求解給定之各分潮參數。該響應分析以 日、月引潮勢能,太陽輻射勢能及非線性效應作為輸入函數,並對實 測資料進行響應分析,該分析可以將引力潮、太陽輻射潮及非線性潮 個別分離,再求得各部份之響應權重函數,即可應用於潮汐的預報。 而正交潮響應模式由Ray (1988) 和 Desai (1996)首先提出。該模式亦 被利用於全球潮位模式之計算(Desai and Wahr, 1995; Han et al., 2000; Matsumoto et al., 2000) 。 在海岸工程的應用上,往昔學者利用類神經網路與模糊系統於預測 波浪方面,有Deo 和 Naidu(1999)以測站之即時波浪資料作為類神經網 路之輸入值,以倒傳遞類神經路推算下一個時間之波浪資料,並以此 建立短期波浪推算模式。Deo 等人(2000;2001)則建構以風速與示性波 高與週期之類神經網路,以預測風浪。Deo 等人(2002; 2003)則以類 神經網路分析波向及推算碎波波高。Makarynskyy(2004)為修正短期波 浪之預測,分析不同延時之測試對預測風浪正確性之關係,並建立輸 入值為 48 小時與輸出值為 24 小時之波高及周期類神經學習網路,以 此進行較長時間且可獲得較正確之波浪預測。Kalra 等人(2005)則以衛 星量測之外海波浪特性及風場資料,進行近岸類神經網路風浪之推 算。蔡(2006)以適應性類神經網路(ANFIS)建立模式風速大小、風向及 延時與對應波浪之架構,進行季節風浪之推算。Chang 和 Chien(2006a,
2006b)針對不同風場參數分析其對颱風波浪特性之關係,建立多個轉換 函數之類神經網路模式,結合Holland 颱風風場模型與類神經網路,建 立三種不同影響參數之台灣東部近岸颱風波浪推算模式以模擬颱風波 浪。Kazeminezhad (2005)以模糊系統則以實測風速與吹送距離建構風浪 推算模式。 應用類神經網路於潮汐預測方面有,Vazira (1997)以類神經網路推 算近海的水位變化並與 ARIMA 模式進行比較。Tsai 和 Lee(1999)應用 類神經網路來預測潮位,此方法架構在僅輸入前幾個時序列的潮汐資 料,利用類神經網路非線性的預測功能,預測下一時刻的潮位,但若 要再預測下一時刻潮位,則需輸入前兩個小時之實測潮位才可繼續預 測潮汐水位。Kumar 和 Minocha(2001)、Mandal(2001)、Medina(2001) 及 Walton 和 Garcia(2001)等學者指出此模式對於工程應用方面稍嫌不 足,且學習次數過少,網路架構不夠穩定等技術上的因素也影響預報 之品質。稍後 Tsai 和 Lee(2001)再以 Swingler(1996)之文章說明其所提 類神經網路之隱藏層與神經元數目已達穩定及最佳化之類神經網路結 構,其最終之結論則說明,該類神經網路模式類似於ARMA 模式之架 構,亦可建立前 48 小時之水位輸入訊號,學習 24 小時之水位模式, 以此模式來說明可進行較長時間之水位預測。 張和黃(2001)以 TOPEX/POSEIDON(T/P)衛星測高資料,並配合正 交潮法及潮汐動力模式來計算潮汐。與實測資料比較發現,T/P 潮汐模 式之預測對近岸潮汐具有較均勻的誤差,潮差的大小不會影響模式之 誤差。另外,應用調和分析法來探討預報某一時程潮汐所需最適的實 測資料幅度等。Lee(2002)、Lee 和 Jeng (2002)以 ARMA 模式,計算 前幾個小時之潮汐水位,與前幾個小時之潮汐水位的殘差值當成輸入 值,輸出值則為下一時刻之潮汐水位,以神經網路來求取 ARMA 模式
中潮位時序及其殘差與潮汐水位的關係,並利用該關係求解長期之潮 汐水位。 Lee (2004)利用類神經網路預報長時的潮汐,其輸入層為各分潮所 對應之餘弦和正弦函數,其輸出層為潮汐水位,並藉由網路之權重獲 得輸出層與輸入層的關係。並提出該權重即類似調和分析法之調和參 數,並以此神經網路進行潮汐預測。張和曾(2001)對網路架構的測試及 模式預報能力的分析,提出類神經網路的輸入變數若不包含理論潮 位,則預測能力不佳;相對地,給予理論天文潮汐當輸入參數後,經 由神經網路演算可得到較佳的權重和閥值,並使網路學習到整體潮位 變動的趨勢,如大潮與小潮的變化,以此增加預測的精確度。 而 Matsumoto 等 人 (2000) 發 展 全 球 潮 汐 推 算 模 式 , 稱 之 為 NAO.99b。該模式以 16 個主要分潮以 TOPEX/POSEIDON 衛星五年的 全球測高水位與219 個近岸實測水位資料,以 Schwiderski (1980)的潮 汐方程式為基礎,以正壓水動力數值方法,進行全球潮汐模式之建立 與資料同化(assimilation)計算。相較於 CSR4.0 和 GOT99.2b 模式,於 淺水及深水區NAO.99b 之誤差皆最小。本文建構水位推算模式並將其 推算結果,與調和分析法、正交潮響應法及NAO.99b 模式進行比較, 其模式之相關比較表如表1-1 所示。
表1-1 各模式之特性比較 本模式 調和分析法 正交潮響應法 NAO.99b 分析方法 輸入參數 1.引潮勢能 2.海溫 輸入參數 1.分潮頻率 輸入參數 1.引潮勢能 2.太陽輻射勢 3.非線性效應 正 壓 水 動 力 數值模式 資料同化 求解目標 1. 神 經 元 之 連 結 權 重與閥值 2.歸屬函數之參數 1.分潮之振幅與相 位角(調和常數) 1.響應權函數 1.流速、流向 及水位 實測數據 需要 需要 需要 需要
1-3 文章架構 本文以探討引潮勢能與海溫參數,對潮汐水位的影響。並藉由類神 經網路方法及適應性之網路推算系統建立相關模式,並以此推算台灣 周遭之水位變化,以下章節說明本文探討影響水位之因子與分析及模 式建立過程,並對相關結果進行比較說明。 第一章: 第一章闡述研究潮汐推算之方法的緣起與目的,並簡介說明潮汐推 算之方法與分類及特性,針對影響潮汐之因素進行探討。以此說明本 文主要探討天體對地球之引潮力與海溫對潮汐之影響程度。對於相關 潮汐推算方法進行文獻回顧及說明,其中包含調和分析法、潮汐響應 法、全球潮汐推算模式及類神經網路與模糊理論方法等。 第二章: 本章說明潮汐資料的潮型與平均潮差之分析,並由上述分析說明台 灣週遭潮汐水位的特性,並以群集分析法將收集之14 個潮位測站進行 潮汐特性分類,以此作為本文建立模式之群集,對於往後本文潮汐模 式之建立,亦可使用於相同群集之潮汐推算。 第三章: 該章節闡明地球上潮汐水位受到日及月引潮力,而有升降的變化。 引述前人之引潮勢能理論,進而推求引潮位勢參數。並說明由引潮位 勢求得之水位與實測水位約有20~30%之誤差,但兩者之相位則約略相 似。由於實測潮汐包含引潮力及太陽輻射之水位變化,非線性效應等 因素,因此,以引潮勢能推計算之水位,無法代表實際的水位變動情 形。本文於此章引進類神經及模糊理論架構,藉以建構引潮勢能類神 經模式,及同時考慮引潮勢能及海溫影響之類神經-模糊模式,以詳細
說明各模式之基礎原理及建構方式。 第四章: 於 此 章 節 說 明 應 用 倒 傳 遞 類 神 經 網 路(Back-propagation Neural Network)進行模式之建立,並以第三章所討論之引潮位勢參數作為該神 經網路之輸入值,進行單站之學習與驗證,推算長時間之潮汐水位並 與調和分析法、正交潮響應法、NAO.99b 模式進行比較與分析。並說 明本模式(TGF-NN)除了可進行學習測站之長時間推算,亦可應用於相 似群集測站之水位預測。 第五章: 經由引潮位勢建立之 TGF-NN 模式,本文再探討另一個影響潮汐 之因素,海溫。以海溫與水位之長週期分析,發現兩者之相關性 r 約 為 0.68,並以花蓮之長週期水位與其他測站進行相關分析,顯示花蓮 之長週期水位與各測站相似。因此,建立以海溫作為影響因子之適應 性模糊推算系統,並聯合引潮勢能模式而為TGFT-FN 模式,並對各測 站之推算結果進行兩模式之比較。 第六章: 最後一章則說明簡述本文之結論與TGF-NN 和 TGFT-FN 模式之建 構流程與分析方法,並對兩模式之結果摘要其結論,說明台灣周遭水 位之模式計算精度,並可應用本模式進行無潮位測站之水位推算,於 工程應用較具實用性。
第二章 潮汐特性分析
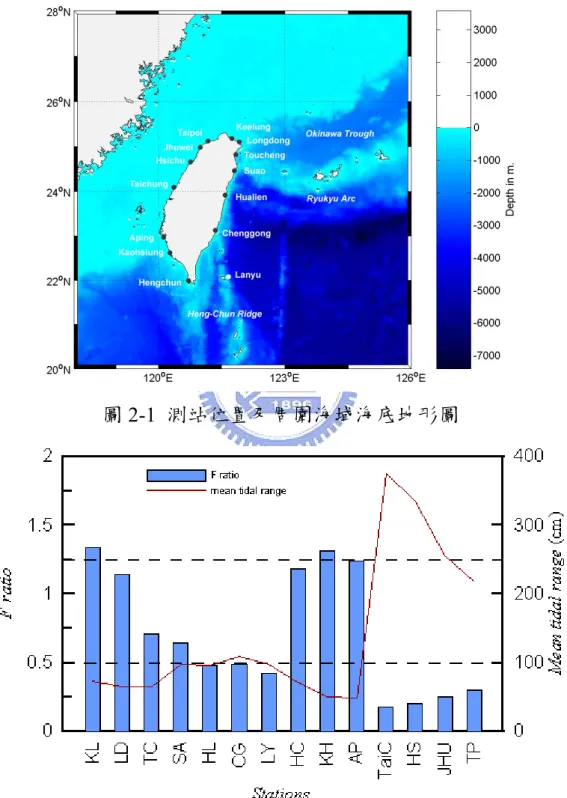
本文收集台灣周邊潮位測站資料共有 14 個,東部依序為基隆 (KL)、龍洞(LD)、頭城(TC)、蘇澳(SA)、花蓮(HL)、成功(CG)及蘭嶼(LY) 等七個測站;西部為台北(TP)、竹圍(JHU)、新竹(HS)、台中(TaiC)、安 平(AP)、高雄(KH)及恆春(HC)等七個測站,示如圖 2-1。圖 2-1 中東部 海域,附近水深約為6000 公尺,東北部有沖繩海槽及琉球島弧,台灣 南部則有恒春海脊,台灣西海岸附近則由恆春至安平一帶,地形由深 至淺。由此至淡水附近海域之海底深度最淺,是為台灣灘。整體來說, 台灣東部最深,西北部最淺,西南及東北部之地形由深變淺。 除 了 花 蓮 收 集 2001-2004 年 共 四 年 資 料 外 , 其 餘 測 站 則 收 集 2001-2002 年資料。潮汐水位資料來源為中央氣象局海象測報中心。由 於量測儀器或人為因素之故,使得潮汐資料出現遺缺,本文對於所收 集的資料進行遺缺部分進行補遺,首先對遺缺資料給定任意潮位值, 進行一年之調和分析並選取60 個調和分潮,將所求得之調和常數對遺 缺資料進行預測,以此預測值替換先前之任意潮位值,以此重複進行, 直到前次與該次之遺缺資料部份的誤差量為最小,即完成資料補遺的 過程。 經由資料補遺後,本文將所有潮位測站進行潮型與平均潮差之分 析 , 以 調 和 分 析 後 之 各 分 潮 振 幅 , 分 析 其 法 國 制 潮 型 F 值 為(
K1+O1 M2 +S2)
,示如圖 2-2。F 值小於 0.5 為半日潮型,大於 1.25 時 則為全日潮型,介於兩者間為混合潮。由圖 2 可知,除基隆與高雄屬 於全日潮型,台北、竹圍、新竹及台中屬於半日潮,其餘則接近混合 潮型。平均潮差除了台北、竹圍、新竹及台中約為2-4 公尺,其餘測站 約為 1 公尺以下,潮波由海峽南北開口進入,並交會於中部海域,由 於台灣海峽中部至西北部海岸,分潮振幅受到海峽束縮且地形變淺,以致潮差變化較大,由此可知,中西部海岸的潮差高於南北兩端之現 象。莊(2000)之台灣海峽潮波振盪研究提出,台灣西部海峽區域之潮差 顯著,起因於海峽之陸架平台地形扮演潮波振盪之故。經由模式與實 測資料的分析,顯示該水域有重複駐波之存在,振盪腹點約在海峽中 部,節點則於高雄與基隆外海,而其共振週期與半日型分潮週期之ㄧ 半接近。 本文將進行台灣沿海潮位特性的分類,並以此分類結果作為模糊-神經網路模式建立之參考,本文將計算各測站一年之調和分析分潮常 數,並以群集分析法進行分類並探討其相似之特性。群集分析法 (hierarchical clustering)之原理為將一批群類與變數,按照它們性質上的 親緣關係(genetic relation)進行分類,群類之變數為 m 個,則視為 m 維 空間,每個群類看成是m 維空間的一個點,在 m 維坐標中,定義點與 點(變數值與變數值)之間的某種距離。首先將 n 個群類自成一類,然後 每次將具有最小距離的兩類合併,合併後重新計算類與類之間的距 離,這個過程一直繼續到所有樣品歸為一類為止。 依照觀測體間不同的數量特性之距離遠近予於分類,並依其測體間 之距離遠近,描述它們間之相似性(similarity)與相異性(dissimilarity), 距離愈近的則相似性愈大,反之距離愈遠的則相異性愈大。而衡量變 數間之距離遠近程度用數值來表示,該數值稱為距離係數(distance coefficient),其表示方法有很多種,最常使用的是歐氏距離法(Euclidean distance),其觀念如我們有二個群類分別為群類 A、群類 B,二群類分 別有三個變數,為x1、x2、x3;y1、y2、y3。將群類 A 及 B 之變數值表 示在三維作座標軸上,分別於三維歐氏空間中表示 A、B 兩點,如圖 2-3 所示,並量測出兩測點間之變數差值,當差值小,表示 A 和 B 兩 測點特性相近,則說明瞭兩個分類單位有較大的相似係數(similarity
coefficient );相反的當變數差值大,表示 A 和 B 兩測點特性疏遠,則 說明瞭兩個分類單位有較大的相異係數(dissimilarity coefficient)。差值
AB
d 之計算,如式(2-1)所示
dAB =
(
x1 −y1) (
2 + x2 −y2) (
2 + x3 − y3)
2 (2-1)一般則使用歐氏距離平方值(squared Euclidean distance) 2
AB d ,作為後 續分析的標準。若將式(2-2)的三維空間座標推廣至 n 維,得到的歐氏 距離平方值可表示為下式 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − =
∑
= 2 1 2 n i j i AB x x d (2-2) 當各群類間的相似性予以給定歐氏距離衡量距離標準後,接著使用 華德法之階層群集分析。華德法又稱為最小變異數法(minimum variance method),其群集合併群類間之距離遞推公式可表示為 2 2 2 2 pq r iq ip ir d n n n d n n n n d n n n n d i i r i q i r i p i + − + + + + + = (2-3) 其中np和nq分別表示群集為GP群集與Gq群集中分類單位個數。當兩個 類群GP群集與Gq群集所合併的新群集為Gr後,Gr群集又為下個新群集 i G 聯繫,其中nr和ni分別表示群集為Gr群集與Gi群集中分類變數之個 數。本文將其潮位特性分類進行群集分析,示如圖2-4。由圖 2-4 可知 當歐氏距離平方值為 3 時,可分成三個群集,分別為台灣西北部之台 北、竹圍、新竹及台中;東部海岸之頭城、蘇澳、花蓮、成功及蘭嶼; 基隆與龍洞及恆春、高雄與安平另成一區。上述台灣東北部與西南部 合成一區,皆因兩地都是潮波由深海傳遞至地形陡變的地區,因此兩 者經群集分析後被分類至同一特性的群集。本文將應用群集分析結果,台灣西北部、東部與東北及西南部等潮汐分區,進行模式學習過 程之測站選擇。
圖2-1 測站位置及周圍海域海底地形圖
圖2-3 歐氏距離的空間表示
第三章
引潮勢能理論、類神經及模糊模式
3-1 引潮勢能理論 海潮水位變化的成因,主要的影響為天體的萬有引力及相對旋轉的 離心力二項,本研究並不考慮柯氏力所造成的潮波旋轉效應。月球對 地球上的潮汐引力向著月亮,地球與月球公轉的離心力則垂直於地球 與月球的公有旋轉軸,並相反於引力的方向,而離心力與引力的合力 則形成地球上海水面週期性升降的現象。當地球與月球相對運動位 置,示如圖3-1。 圖 3-1 月球對地表水體引潮力示意圖 若令月球與地球兩中心距離為D,X 點為地球上水體的位置,而其 與月球中心的距離為ξ
,地球半徑為R,月球的質量為 M,重力加速度 為g,萬有引力 G=6.67×10-11Nm/Kg2,並令 X 處的水體為單位質量, 月球對其之引力為Fa,及運動離心力為 Fc,分別示如 D ξ β θ RK Fc Fa radial tangential Moon Earth ω=2π/τ Fg γ X Ec M c2 ξ GM Fa = (3-1) 2 D GM Fc = (3-2) 其中天體引力與離心力及地心對該點之合力,以極座標r 與 θ 表示 其分力為 ) cos cos ( 2 2 D GM Fr θ ξ γ − = (3-3) ) sin D sin ( GM F 2 2 ξ γ θ θ = − (3-4) 式(3-3)及式(3-4)中,γ=θ+β,β 為月球中心與 X 點及地心兩連線的 夾角∠XMcEc,θ 為觀測點 X 頭頂方向與地心及月球中心之連線的夾角 ∠XEcMc,稱為天頂距離。今假設引潮力之位勢為
φ
,式(3-5)分別為極 座標引力與位勢間之關係,並求得月球之引潮位勢φ
a,
示如式(3-6), 而 共 同 旋 轉 離 心 力 Fc 之 r 與 θ 方向之分力各為−GMcosθ/D2 及 2 / sin D GM θ ,其位勢φ
c,示如式(3-7) r F r = ∂ ∂φ
θ
θφ
F r ∂ = ∂ 1 (3-5)ξ
φ
ξ GM dr r GM a =∫
= ∞ 2 (3-6) C r D GM dr r GM dr r GM c + − = = − =∫
∫
θ
θ
θ
φ
cos sin cos 2 2 2 (3-7)而地球上X 處之水體所受之引潮位勢
φ
則為φ
a +φ
c,並示如式(3-8) C r D GM GM c =ξ
−θ
+φ
2 cos (3-8) 於地心條件,r=0,ξ
=0 處無引潮力,故φ
=0,則 C=-GM/D,此處 僅考慮地球表面之引潮位勢,r 可以地球半徑 R 代替,因此引潮勢能可 表示為式(3-9),而引潮勢能所造成之水位變化為 η,其關係如式(3-10), 因此可求出天體引力對地球上觀測點的水位變化,本文以日及月作為 影響觀測點水位變化的主要天體,可求得受日、月影響下的潮汐水位 ηe,示如式(3-11),其中下標 m 表示月球,s 表太陽。 ) 1 cos 1 ( 2 D D R GM − − = θ ξ φ (3-9) ) 1 cos 1 ( 2 D D R g GM g =− − − − ≈ θ ξ φ η (3-10) ) 1 cos 1 ( ) 1 cos 1 ( 2 2 s s s s m m m e D D R g GM D D R g GM m − − − − − − = θ ξ θ ξ η (3-11) 式(3-11)中日、月至地球中心 D 與觀測點 X 的距離ξ
,並可由日、 月軌道對地球的相對位置及黃道、赤道與白道的各交點求出六個天文 變量(s、h、p、ps、N’)以計算出 D 值,其相對位置圖示如圖 3-2。圖 3-2 地球與黃道、白道示意圖 由圖3-2 中,黃道與赤道之交點Γ為春分點,黃道與白道的交點為 升交點Ω,取白道上的Γ’點,使其ΓΩ等於pp Γ'Ω,Γ’點稱為輔助春交點。 天文變量 s 為自Γ’計算的月球平均經度,h 為自Γ點所計算的太陽平 均經度,p 為自Γ’計算的月球近地點的平均經度,ps為自Γ’計算的太 陽近地點的平均經度,N 為自Γ所計算的月球升交點的平均經度。並 依據 J2000.0 系統及儒略世紀數 T 計算上述六個天文變量隨時間的變 化,並表示為下式 ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ + + − = + + + = − − + = + + = + − + = 3 2 3 2 3 2 2 3 2 000002 0 00207 0 13626 1934 04452 125 000003 0 00046 0 71946 1 93835 282 00001 0 01031 0 01388 4069 35345 83 0003 0 76980 36000 46607 280 000005 0 00161 0 88128 481267 31643 218 T . T . T . . N T . T . T . . p T . T . T . . p T . T . . h T . T . T . . s o o o o ' o o o o s o o o o o o o o o o o (3-12) 由式(3-12)中,T 為自 2000 年 1 月 1 日 12 時所計算的儒略世紀數。
由上述天文變量可計算出,地月平均距離及瞬時距離之比(Dm / Dm)及地 日平均距離及瞬時距離之比(Ds /Ds),示如式(3-13)及(3-14)。
(
)
∑
+ + + + + = i s i ' i i i i i m m Y cosbs c h d p e N f p D D 1 (3-13)(
)
∑
+ + = i s i i i s s Y cos ch f p D D 1 (3-14) 式(3-13)及(3-14)之 Yi及 bi、ci、di、ei、fi可從查表求得,除了 Yi 參數外,其他五個參數皆為整數。Dm為地月平均距離,約為3.8×105km, s D 為地日平均距離1.5×108km。由圖 3-1 可推算星體至觀測點 X 之距離 為勒讓德方程組,示如下式(
θ)
ξ D P cos R D n n n∑
∞ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = 0 1 1 (3-15) 由上述式(3-12)至(3-15)代入式(3-11),可計算地球上的觀測點受 日、月引潮力之水面變化情形。 本文以式(3-11)進行花蓮 2001 年 1 月份潮位的推算並比較花蓮實測 潮位,示如圖 3-3 及圖 3-4。由圖 3-3 及圖 3-4 可知,引力勢能潮位的 值小於實際潮位,大小潮的變化情形也不盡相同。但是兩者的相位則 是相同。利用引潮位勢所推算之天文潮汐,與實際潮汐有較大的誤差, 其原因為1. 地球上的海洋水深並非均一,2. 地球並非完整球形,3. 日 月軌道為橢圓形,天體中心至地球距離時時在改變。因此,只應用引 力勢能所推算的潮位,於實際的水位推算上精度較為不足。一般來說 天 文 潮 在 開 闊 海 域 約 佔 實 際 潮 汐 水 位 70-80% 的 比 例 (Molines 等 人,1994)。因此,本文欲探討不同區域海水位變化的成因,將利用神經 網路最佳化學習的特性,並配合地球水位受天文引力的影響因素,做 為網路之輸入值,並與實際水位進行網路訓練,藉此改善引力勢能推算潮汐水位之不足。 0 180 360 540 720 Times (hours) -40 -20 0 20 40 60 80 Wa te r lev el (c m ) 圖3-3 花蓮 2001 年 1 月之引力勢能推算潮位 0 180 360 540 720 Times (hours) -120 -80 -40 0 40 80 120 Wat er leve l(c m ) 圖 3-4 花蓮 2001 年 1 月實測潮位
3-2 類神經網路模式
類神經網路(Artficial neural network,ANN)是模擬人腦之結構及訊 息傳遞的過程,所建立之刺激輸入值及反應輸出值間之關聯模式,對 於物理現象本身機制不明、複雜或其推論方程式之建立有遺漏部份, 該模式都能以學習過程之方式建立輸入及輸出間之最適化模式,以描 述整個物理現象。本文應用類神經網路具有學習最佳化的功能,並透 過其模式輸出值與學習目標值間的連結建立起其相關性,利用網路權 重(weights)與門限值(bias)來表示其關係的強弱。本文所選取之網路演 算法則為倒傳遞法(Back-propagation),由於倒傳遞網路具有監督式的學 習,神經元間的交互作用經由該學習方式求得模式輸出值與實際值之 最小方均根誤差。本文架構神經網路使用Matlab 軟體來建置倒傳遞類 神經網路,如圖3-5 所示。 圖3-5 類神經網路架構示意圖 倒傳遞學習演算法是被廣泛使用的一種學習演算法,因其具有學習 及回想的功能,故可在回想過程中以相同於學習過程的方式來進行預 測。一般倒傳遞網路可分為三部份,輸入層用以接受外在環境的訊息, 隱藏層則表現輸入與輸出層各處理單元間的相互關係,並以權重和閥 值來闡述該相關性,輸出層用以輸出訊息給外在環境。倒傳遞網路學 習方式是由輸入相當數量之學習樣本,應用向前饋入與誤差向後修正
Hidden layer a1 Output layer a2
P IW b1 LW b2 f1 f2 na nb Input layer
兩步驟,推求輸入變數與輸出變數的內在對映規則,再應用回想功能, 進行新案例之輸出變數值推估。 圖3-5 所架構之網路為一層隱藏層及一層輸出層,f、g 為轉換函數, na
及
nb為隱藏層及輸出層之神經元個數,其扮演推論結果經由轉換函 數映射之過程。P 為輸入變數矩陣,IW和 b1為輸入層與隱藏層間的權 重和閥值矩陣,LW和 b2為輸出層與隱藏層間的權重和閥值矩陣。經由 網路學習誤差最佳化的過程,神經網路將輸入值及學習目標值的關係 紀錄在閥值與權重上,以此表示輸入值與學習目標值間的關係強弱。 其中,類神經網路使用轉換函數使隱藏層模仿生物神經元處理非線性 的機能,以輸入值之加權乘積和轉換成處理單元之輸出值。整個倒傳 遞網路模式由隱藏層與輸入參數及輸出層的關係可用方程式表示為 a1= f ( IWPi+b1) (3-16) a2= g ( LWa1+b2) (3-17) 其中 a1為隱藏層之輸出值矩陣,a2為倒傳遞網路輸出值矩陣。藉由上 式之運算後求出網路輸出值 a2,其與學習目標值 Y 間之向量(norm)絕 對值定義為誤差函數E,示如下式 N E 2 2 Y a − = (3-18) 因此,整個網路學習的過程為了最佳化各神經元間之權重與閥值使 誤差函數達到最小值,反覆迭代其過程使網路輸出值趨近學習目標 值。當網路完成學習過程(最佳化過程),建立最合適的權重和閥值後即 可以此網路的回想過程來進行預測分析。以下說明其演算過程,最佳 化過程可分為兩類,一為啟發式的最佳化,如可變學習數率(Variable Learning Rate)與有彈性(Resilient)之演算法;另一為使用標準的數值最佳化,如共軛梯度法、擬牛頓法及Levenberg-Marquardt (L-M)法。一般 而言,在函數逼近的問題上Levenberg-Marquardt 演算法將有最快之收 斂性 (Neural Network Toolbox User’s Guide)。因此,本文選擇使用 L-M 演算法做為達到網路誤差函數最小之最佳化過程,該演算法使用 Hessian 矩陣逼近方式來達到最佳的目的,並以下式表示之 e J ] I J J [ X Xk+1= k − T +μ −1 T (3-19) 其中,Xk、Xk+1分別表示每次疊代權重{IW,LW}與閥值{b1,b2}之 前後最佳化計算值,J 為 Jacobian 矩陣包含網路誤差與權重值和閥值的 一階微分,e 為網路誤差向量,I 為單位向量。式(3-19)之 μ=0 時,則近 似牛頓法的 Hessian 矩陣,當 μ 值很大時,式(3-19)則具有較小步階之 梯度下降,其目的即為盡可能之快速地移向牛頓法以達到網路誤差最 佳化的結果,最後可獲得適應該網路之最佳化權重和閥值(見 Gill, Murray and Wright, 1981))。因此,倒傳遞類神經網路經由式(3-16)及式 (3-17)計算輸入值經轉換函數映射至模式輸出值,並以式(3-19)作為權 重與閥值之最適化反覆迭代計算,其網路學習完成之標準則以式(3-18) 來判斷。
3-3 類神經-模糊推論模式
本 文 將 使 用MATLAB 的 ANFIS(adaptive network-based fuzzy inference system) 適應性之網路模糊推論系統,以此作為海溫推算長周 期水位的模式,ANFIS模式不僅能夠能利用專家知識庫中所建立的規 則,而且利用類神經網路的學習能力建立輸入及輸出間的最佳化。因 此,於其建構的過程中ANFIS提供數據並獲得其相關性,並以歸屬函 數來給定該模式最適化的相關參數,其特性為模糊邏輯與類神經網路 系統的結合,模糊邏輯模擬專家系統的邏輯推理,可用於處理物理模 式中未知或不確定的的控制與評估,而類神經網路則可同時處理定性
與定量的關係,因此具有兩者的優點而為新的系統,該方法適用於非 線性且複雜的變化情形。 本文將詳述ANFIS 之架構流程,假定該模式包含兩個輸入值及一 個輸出值,並設定有兩種模糊(IF-THEN)規則,而該規則使用 Takagi 和 Sugeno’s 形式,示如圖 3-6,ANFIS 之建構流程則示如圖 3-7。由圖 3-6 的模糊推論中可知,規則1: If x1 is A1 and y1 is B1 then f1 = p1 · x1 + q1 ·
y1 + r1,規則 2:If x2 is A2 and y2 is B2 then f2 = p2 · x2 + q2 · y2 + r2,上述
之模糊推論於ANFIS 架構中,於同一層之所有節點,使用相同的歸屬 函數(membership function)。 以下說明其內部構造,其分為五層分別為輸入層、規則層、正規化 層、結論推論層及輸出層,其推算之流程為先將輸入數據進行模糊化, 並架構輸入因子之歸屬函數,而歸屬函數則藉由類神經網路最佳化的 學習功能求得,經由模糊推理得到輸出的模糊評價結果。因此,該模 糊類神經網路模式具有一般類神經網路的性質與優點外,又由於使用 模糊推算的運行機制,使得處理單元的計算變成較簡便,且亦加快計 算的速度,並使系統容錯的能力大為增加。由圖3-7 之模糊規則的推論 過程,其相對應的的架構分別說明如下。 1.輸入層(layer 1) 第一層是將輸入變數映射到模糊集合中,進行模糊化處理,處理單 元為圖3-7 中的方塊神經元,依圖 3-7 之設定每個輸入值具有兩個歸屬 函數。該層節點之輸出函數為經模糊化之歸屬函數,示如式(3-20),其 中歸屬函數可選用鐘形(generalized bell)、S 形(sigmoidal)及三角形 (triangular)等歸屬函數,μAi (x)為鐘形函數示如式(3-20),其最大值為 1,
i bi i i A i a c x x O1 2 1 1 ) ( − + = = μ (3-20) 其中,i 為歸屬函數的數量,x 為輸入值, ai、bi、ci是鐘形歸屬函 數的參數,而這些參數稱為前項參數(premise parameters)。 2. 規則層( layer 2) 第二層為則是由第一層之輸出歸屬函數,進行相互的矩陣乘積,並 經由模糊交集(T-norm),進行模糊邏輯之聯集(AND)運算求得其結果, 其輸出值示如式(3-21),處理單元則為圖 3-7 中圓形神經元,其中以符 號Π 表示,而規則數量可由第一層之歸屬函數數量的輸入變數數量之 冪次方,因此本層之輸出值則為四個規則,即(22=4)。 O2 =w = (x)× (x) i =1,2 i b i A i i μ μ (3-21) 3.正規化層(layer 3) 第三層為規則層之輸出值,進行每一個規則之正規化處理,示如式 (3-22),其處理單元為圖 3-7 中圓形神經元,並以符號 N 表示,使其輸 出值介於 0 到 1 之間。 1,2 2 1 3 = + = = i w w w w O i i i (3-22) 4.結論推論層(layer 4) 第四層則為將正規化層之結果與 Takagi 和 Sugeno’s 模糊規則相 乘,示如式(3-23)其處理單元為圖 3-7 中方形神經元。 Oi4 =wi fi = wi
(
pix+qiy +ri)
(3-23)其中,pi、qi、ri為後置參數(consequent parameters)。 5.輸出層(layer 5) 第五層中只有一個處理單元,該單元以圓形神經元表示,並以Σ 符 號標示,其可計算第四層之輸出總和,作為網路之輸出值,示如式 (3-24)。 ∑ ∑ = ∑ = i i i i i i i i i w f w f w O5 (3-24) 由上述各層之計算,其中各參數則經由類神經網路的監督式學習, 使得模糊推論系統可獲得最佳化的調整,以修正模糊系統的歸屬函數 之各項參數值,提高演算效率及效能以達輸出精度的要求。 圖3-6 模糊邏輯推論示意圖
第四章 引潮位勢神經網路模式
4-1 引潮勢能之類神經模式 本文將以上所述之天文潮引力理論為基礎,進行神經網路之分析。 利用日、月及地球天體運行之三維空間資料,以第三章所述之日與月 之 D、ξ
及 θ 值,並增加日、月與地球之相對角度 φ,示如圖 4-1。當 cos(φ)=±1 時表示發生大潮的位置,cos(φ)=0 時表示發生小潮的位置, 藉此提供類神經網路認知大小潮發生的時間及位置。而本文之神經網 路 之 輸 入 值 共 有 七 種 參 數 ,R/Dm(t) 、 R/Ds(t) 、 R/ξ
m(t) 、 R/ξ
s(t) 、[R/Dm(t)]2cos(θm(t))、[R/Ds(t)]2cos(θs(t))及 cos(φ(t))。輸出值則為對應之
實測潮汐水位,引潮力參數之神經網路,本文稱之為 TGF-NN 模式, 使用一層隱藏層,5 個神經元,轉換函數為雙曲線函數,最佳化過程則 選取上述介紹之L-M 法,其權重與門限值疊代次數為 1500 次,預設之 最小學習誤差為10-6。 圖4-1 太陽、月球與相對地球之角度示意圖
φ
X Y Z4-2 模式之驗證分析 本文架構由引潮勢能參數之神經網路模式(TGF-NN)水位推算模 式,並應用潮汐之群集分析結果,首先選擇東部地區之花蓮測站進行 類神經網路之分析,並以該潮位站2001 年資料進行學習後,逕行預測 2002 年資料,並與調和分析法進行比較;而調和分析亦以 2001 年經調 和常數之計算後,以此常數推算 2002 水位資料,並示如表 4-1。由表 4-1 可知,網路學習之部分之方均根誤差值約為 6.37 略低於調和分析法 之結果,本模式以不同延時(lead time)之輸入值進行分析計算,本文以 方均根誤差(RMS)與相關係數之平方值(R2)來判斷網路延時的最佳選 擇,並示如式(4-1)及式(4-2)。由表 4-1 可看出延時 2 小時之結果,其計 算方均根誤差值為10.57,略高於調和分析法之結果,但與其他延時之 結果比較則為最低值;其相關係數之平方值亦為最低約為 0.98,因此 本模式之最佳輸入參數延時為2 小時。 N t t RMS N i i p i m
∑
= − = 1 2 )] ( ) ( [η η (4-1)( )
( )
[
]
( )
[
]
2 2 2 1∑
∑
= = − − − = N 1 i p i m N 1 i i p i m η t η t η t η R (4-2) 圖4-2 為神經網路模式與調和分析法之每月方均根誤差比較,由圖 4-2 可知,兩者的分布在訓練階段與預測階段之誤差相近,顯示本文之 TGF-NN 模式經由上述架構的學習後,於潮汐水位推算的精度與調和 分析法相似。圖4-3 至圖 4-4 則為訓練階段與預測階段之 1 個月潮汐推 算值與實測值之比較,兩者於大小潮之預測值與相位皆與實際潮位接近。圖4-5 至圖 4-6 為訓練階段與模擬階段全年的相關性比較圖,訓練 階段之相關係數平方值約為 0.98,預測階段之相關係數之平方值約為 0.94,顯示 TGF-NN 模式的學習過程可較完整的描述引力勢能與潮汐 水位間的關係,因此,其潮汐之預測結果可達調合分析法的精度。由 上述結果顯示,本研究之 TGF-NN 模式的精度與調和分析法之結果相 似,花蓮測站之平均潮差約為96 公分,其預測階段之相對誤差百分比 約為10%(10.57/96)。 因此,本文將利用該模式於花蓮四年潮位之推算並與其他模式進行 比較,示如表4-2。表 4-2 為 TGF-NN 模式與選用 60 及 26 個分潮的調 和分析法、正交潮法及NAO.99b 模式之比較,由表 4-2 可看出 60 個分 潮的調和分析法學習一年後,預測 3 年的方均根誤差大約 10.28-12.21 公分,而以 26 個分潮的調和分析法之預測 3 年的方均根誤差大約 10.35-13.76 公分。而正交潮模式其誤差均方值約為 10.34-15.24 公分, NAO.99b 模式則為 10.69-14.05 公分,本模式則為 10.57-11.96 公分。由 表 4-2 結果可知本模式之能力與調和分法相似,略優於 NAO.99b 模式 之結果。而 NAO.99b 模式則與調和分析法(26)及正交潮模式之預測能 力相似。 因此,對於單點的潮位預測,則由TGF-NN 模式與選擇 60 調和常 數之調和分析法獲得較好的結果,因此,本文以花蓮測站學習過之神 經網路模式,將應用於東海岸的數個潮位站之潮汐推算,輸入值將只 提供不同測站對天體的各個參數值,代入花蓮之 TGF-NN 模式,即進 行東部海岸測站的潮位推算。
表4-1 TGF-NN 模式與調和分析法之比較 RMS(cm) HA TGF-NN Lead time(hour) 0 3 2 1 0 2001 6.57 8.43 6.37 8.64 17.58 R2 0.975 0.955 0.976 0.933 0.843 2002 10.28 14.45 10.57 13.02 15.75 R2 0.939 0.867 0.935 0.874 0.832 圖4-2 TGF-NN 模式與調和分析法與實測資料之每月方均根誤差比較
圖 4-3 2001 年 1 月之實測與 TGF-NN 模式之水位比較
圖4-5 2001 年之實測與 TGF-NN 模式水位的相關性比較
表 4-2 花蓮 TGF-NN 模式及各模式與實測資料之比較 本文另以龍洞(LD)、頭城(梗枋 TC)、蘇澳(SA)、成功(CG)、蘭嶼(LY) 及恆春(HC)等六個地點進行 2001-2002 年的其他潮位的推算。目的在 於建立花蓮 TGF-NN 模式後,於該模式僅輸入不同測站之引潮位勢參 數,以推算其他鄰近地點之潮汐水位。雖然龍洞及恆春於潮汐特性分 類與其他四個測站不同,本文欲探討不同潮汐特性於 TGF-NN 之預測 結果與關係。表4-3 為 TGF-NN 模式及 NAO.99b 模式推算東部不同測 站的水位預測值比較,其中龍洞資料於2001 年資料只有 11-12 月資料, 因此不計算2001 年龍洞的潮位推算值。從東部六個潮位測站分析其法 國制F 值,由北往南依序 1.14、0.71、0.64、0.49、0.42 及 1.18。顯示 所選取的六個站皆屬混合潮並包含花蓮,其法國制F 值為 0.48。龍洞、 頭城、蘇澳距花蓮約131、106、72 公里,而成功、蘭嶼及恆春距花蓮 約102、214、243 公里。 由表4-3 可知本模式東部測站的推算結果,可知龍洞與恆春之方均 根誤差值大於 NAO.99b 模式之結果,其他四測站之結果與 NAO.99b RMS(cm) R2 Method 2001 2002 2003 2004 2001 2002 2003 2004 HM(60) 6.57 10.28 12.21 10.38 0.975 0.939 0.964 0.937 HM(26) 15.21 11.34 10.35 13.76 0.866 0.917 0.909 0.888 R-O 15.24 11.28 10.34 13.52 0.865 0.918 0.938 0.891 NAO.99b 15.61 11.69 10.69 14.05 0.861 0.911 0.930 0.884 TGF-NN 6.37 10.57 11.70 11.76 0.977 0.935 0.954 0.919
模式相似,兩模式之誤差於2001 約為 0.57-1.34 公分,於 2002 年約為 0.07-3.24 公分。而 NAO.99b 模式以五年的衛星測高資料進行 16 個短 週期分潮的同化,才可進行全球潮位的推算。而 TGF-NN 模式可經由 花蓮測站輸入引潮力參數並學習一年後,即可再向外算至其他鄰近測 站,其推算的範圍約從頭城至蘭嶼,上述測站於潮汐群集分區屬於同 一特性,其外海的地形變化較小,潮汐受地形的影響亦較小。 另外,由於龍洞與恆春因海底地形附近有海盆及海及之故,潮波除 受天文引力影響之外,亦受到地形的影響使得潮時有延後之變化。本 文之 TGF-NN 模式以花蓮作為學習的測站的模式,地形效應無法較完 善的來描述龍洞與恆春的水位。 表4-3 東部地區不同模式與實測資料之推算結果 Location Year Index Method
LD TC SA CG LY HC TGF-NN -- 18.57 14.37 9.23 15.71 24.77 RMS (cm) NAO.99b -- 17.96 13.03 9.80 16.45 13.17 TGF-NN -- 0.845 0.878 0.950 0.860 0.648 2001 2 R NAO.99b -- 0.611 0.895 0.955 0.847 0.837 TGF-NN 27.46 17.61 14.19 11.73 16.79 25.18 RMS (cm) NAO.99b 17.05 18.71 14.26 13.76 13.55 11.46 TGF-NN 0.537 0.856 0.861 0.923 0.836 0.629 2002 2 R NAO.99b 0.703 0.596 0.883 0.907 0.890 0.874
除了進行東部群集特性分區 TGF-NN 模式架構,對於其他兩個分 區亦進行相同模式之建構,以期完成台灣全島之潮汐推算模式。因此, 本研究將分成3 個區域進行 TGF-NN 模式的學習分區,分別為東北部、 西北部及西南部。分區之準則以西北海域自成一區外,由於東北部及 西南部海域雖然屬於同一個分區,但是東北部之海底地形為基隆海棚 起至龍洞終至麟山鼻;西南部自雲彰隆起到後壁湖水深則逐漸增加。 而東北部的區域較西南部小,兩區仍屬不同之地形變化。因此將其再 分成兩區已進行模式之架構。本研究於三個海域 TGF-NN 模式之學習 測站由北至南分別為,龍洞(LD)、新竹(HS)及高雄(KH)以 2001 年為學 習,龍洞測站則以2002 年為學習對象。以完成類神經網路模式之建構, 對於周邊測站則以該模式輸入相對測站之相關引潮勢能參數,遂進行 潮汐水位之推算。而推算結果示如表4-4 及 4-6。 由表4-4 可知本研究以台北港(TP)、竹圍(JHU) 、新竹(HS)、台中 港(TaiC)等四個地點進行 2001-2002 年的潮位推算,其法國制 F 值由北 至南為0.30、0.25、0.20 及 0.18,台北港、竹圍、台中港距新竹約 61、 44 及 73 公里。新竹測站經由第一年之學習後其方均根誤差及相關係數 約為10.64 公分與 0.993,第二年之推算結果則為 15. 08 公分與 0.986, 其結果優於NAO.99b 模式之推算。另外,對於台北港、竹圍及台中港 等測站之海潮推算結果本與NAO.99b 模式相似。由實測水位之觀察顯 示海潮受到地形變化,由北至南其平均潮差漸增,而潮時則約略相似。 由於本研究之 TGF-NN 模式為學習天文位勢引致海潮之變化,因此對 於海潮受地形變化之動力機制之影響,則無進行考慮。 因此,本研究需藉平均潮差來進行潮汐水位之修正,本研究設定 新竹平均潮差若為1,台中港之比值與新竹相似,竹圍則約為 0.77,台 北港則為 0.66。上述比值皆以一年之統計值所求得。另外,為求工程
應用簡便,本研究以一個月之平均潮差作為其比值,竹圍為0.7;台北 港為0.6。因此,若以一年之統計值所求之竹圍與台北港之預測值,於 2001-2002 年之水位推算值修正,比較一個月之平均潮差統計值之結 果,示如表4-5。由表 4-5 可知竹圍與台北港兩測站,不同統計時間之 平均潮差比值,於模式潮位的修正之結果約略相似。因此,於實際應 用上則僅需一個月之統計平均潮差比值,即可修正該種地形變化之海 潮推算值。再由表4-4 可知,台北港、竹圍與台中港之兩年推算結果, 其方均根誤差之 TGF-NN 模式與 NAO.99b 模式差值於 2001 年約為 3.74-18.03 公分,於 2002 年約為 1.41-15.35 公分,其中以竹圍測站之 誤差最大,NAO.99b 之推算與實測之方均根誤差值皆超過 30 公分以 上,顯示該模式於海峽地形之潮波振盪現象,較無法完整描述。由此 結果顯示,可說明本模式所計算之水位受天文引力之影響外,再經由 一個月之平均潮差之可修正地形的效應,即可達到較佳的精度,且優 於NAO.99b 模式。 表4-4 西北部地區不同模式與實測資料之推算結果 Location Year Index Method
TP JHU HS TaiC TGF-NN 18.57 13.46 10.64 17.89 RMS (cm) NAO.99b 26.64 31.49 18.40 21.63 TGF-NN 0.954 0.986 0.993 0.986 2001 2 R NAO.99b 0.940 0.907 0.980 0.975 TGF-NN 16.45 15.53 15.08 20.72 RMS (cm) NAO.99b 28.98 30.88 19.45 22.13 TGF-NN 0.961 0.977 0.986 0.981 2002 2 R NAO.99b 0.912 0.908 0.976 0.975
表 4-5 不同統計時間之平均水位修正模式潮位結果(單位:公分) 另外,本文將東北部與西南部之 TGF-NN 模式計算結果合併於表 4-6,並推算安平(AP)、高雄(KH)、恆春(HC)及龍洞(LD)、基隆(KL)潮 位,西南部其法國制 F 值由北至南為 1.24、1.31 及 1.18,安平、恆春 距高雄港約 46 及 87 公里。東北部其法國制 F 值由東至西為 1.14、及 1.34,基隆港距龍洞約 21 公里。由表 4-6 可之以高雄為學習測站之 TGF-NN 模式,2001 年之學習後其方均根誤差及相關係數之平方值約 為7.39 公分與 0.912,2002 年之推算結果則為 9.36 公分與 0.866。另外 由於龍洞資料於2001 年資料只有 10-12 月資料,因此,以 2002 年作為 學習時間,2002 年之學習後其方均根誤差及相關係數之平方值約為 8.75 公分與 0.922,2003 年之推算結果則為 11.08 公分與 0.822,高雄 與龍洞兩測站之結果皆優於NAO.99b 模式之推算值。因此,對於周邊 測站則引入天文參數於TGF-NN 模式,以推算海潮水位的變化。 本模式之推算結果與實測水位進行比較時,其潮時與實測值存在 相位差。根據氣象局之潮時統計資料,東海岸比西海岸約早5 個小時, 後壁湖比高雄早1.3 小時,高雄比東石約早 2.5 小時,頭城比淡水約早 4.2 小時,顯示海底地形之複雜變化引致潮時之不均勻的分布。因此, 於工程應用上,本文設定恆春測站早於高雄1 小時,於安平早 2 小時; 龍洞早於基隆1 小時以進行潮時之 TGF-NN 模式修正,並示如表 4-6。
Location YEAR Ratio(0.6,0.7) Ratio (0.66,0.77)
2001 17.45 17.68 TP 2002 16.62 16.83 2001 14.51 13.67 JHU 2002 16.71 16.57
安平2001 年則因為該年資料品質不佳,因此不採用於潮位分析,基隆 2002 年則無潮位紀錄。由表 4-6 可知,安平 2002 年之推算方均根誤差 大於NAO.99b 模式 1.26 公分,恆春 2001 年則與 NAO.99b 模式相似, 2002 年則大於 2.67 公分,於基隆推算 2003 年之方均根誤差則小於 NAO.99b 模式 1.24 公分。顯示海底地形坡度變化快速,使海潮產生折 射作用,於本模式以潮時之修正給予預測水位較佳精度,海潮於該種 地形的動力變化相對於 TGF-NN 模式,仍屬無法完整描述的機制,且 本模式亦無考慮因地形效應所產生的潮時差異。因此,TGF-NN 模式 之水位推算結果稍大於NAO.99b 模式。 表 4-6 東北及西南部地區不同模式與實測資料之推算結果
Year Index Method
AP KH HC LD KL TGF-NN -- 7.39 13.74 8.75 -- RMS (cm) NAO.99b -- 13.82 13.17 17.05 -- TGF-NN -- 0.912 0.860 0.922 -- 2001 2 R NAO.99b -- 0.726 0.837 2002 0.703 -- TGF-NN 14.88 9.69 14.07 11.08 14.55 RMS (cm) NAO.99b 13.62 13.61 11.46 17.32 15.79 TGF-NN 0.732 0.866 0.857 0.882 0.769 2002 2 R NAO.99b 0.806 0.747 0.874 2003 0.720 0.741
第五章
嵌入海溫及引潮位勢之模糊-神經網路模式
5-1 海溫對長週期水位的影響 經由第四章之引潮勢能類神經網路模式之架構以預測潮汐水位,影 響潮汐水位除了天體的作用外,另有其他因子如短期的極端變化(颱 風、地震)、溫度、風及兩極冰帽融冰等影響。而這些形成這些現象之 來源為地球上除了自身地核的熱能傳遞,太陽對地球的熱能供給則是 另一途徑,熱能再經由海水所吸收並與大氣氣交互作用而產生其他氣 候及海洋的變化。溫度與溫室氣體於氣候的變遷上,二氧化碳的增加 量扮演重要的角色。Douglas (1997)指出海平面上升量自 1990-2000 年 間,共上升約18.5 公分。而 20 世紀的全球海平上昇量約為 1.1mm/year (IPCC TAR, (Houghton, et al., (2001))。Kuo (2006)利用全球潮位實測資 料與多個衛星之水位測高資料,進行海平面水位的上昇分析,提出 1900-2005 年間上昇量 1.74±0.48 mm/year。 因此,地球上溫度與溫室氣體的因素也能引起水位的週期性變化, 這些變化是直接或間接由太陽輻射作用所產生的結果。由氣象因素造 成的水位週期變化,稱之為太陽輻射潮(或 thermal tide),其具有不可忽 略的量值。對太陽輻射潮的研究首先由 Munk 和 Cartwright (1966)在 對潮汐進行反應分析時開始,之後由Cartwright 和 Taylor (1971) 對太 陽輻射勢進行展開,以便在潮汐調合分析中引入氣象潮,Sa 為年週期 輻射分潮,Ssa 為半年週期輻射分潮。在對實測潮汐水位進行調合分析 時,Sa 分潮振幅遠大於 Ssa 之結果,顯示實際潮汐的年週期變化過程, 主要是由太陽輻射所引起。於夏天時海溫升高,水體會膨脹,在熱帶 與溫帶地區甚至會造成海水位上升15 公分,因此潮汐水位的資料包含 海溫與年週期變化的分量,兩者之頻率約略接近。Wyrtki(1990)計算受 溫度影響之海平面上升,提出若熱帶低區溫度上升 1 度,則於該區海平面約上升3.4 公分。於中緯度則上升 3 度,海平面約上升 20 分公左 右。極區則上升4 度,海平面約上升 32 分公左右。由此可知,海平面 的上升會受到溫度的影響,並因緯度之變化上升的量亦不同。因此本 文選取海水溫度作為長週期潮汐水位變化的影響因子,以此進行長期 海水位的統計分析,並建立相關模式以推算長期潮汐變化,由此建立 引潮位勢及海溫為影響因子之潮汐推算模式。 本文以溫度與潮汐水位之長週期的變化進行分析,將花蓮測站(HL) 之兩年潮汐水位及測站海溫進行月移動平均,獲得長週期的水位及溫 度變化,示圖如5-1。由圖 5-1 可知,實線為水位的長週期變動,虛線 則為海溫的變化,其周期與水位的變化約略相似,兩者之相關性 CE (Correction coefficient)約為 0.68,兩者之周期大約為一年。再者,本文 再將 2001-2002 年花蓮測站與其他測站之長週期水位進行相關性分 析,由於安平、基隆及龍洞測站無 2001 年資料,因此進行 10 個測站 之比較分析,示如表5-1 及圖 5-2 至 5-11,以評估不同地點之長周期水 位的影響。由表5-1 可知除成功(CG),蘭嶼(LY)及台北(TP)外,其他的 相關性r 都在 0.6 以上,其中台北測站經月平均移動分析,發現其水位 資料中並不包含長週期水位變動的成分。由此顯示,花蓮之長週期水 位變化與其他地區的水位變化相似。進一步由圖 5-2 至 5-11 可知,花 蓮2001 年實測長周期水位之差異較高於與其他測站,2002 年之結果則 相似,月平均海面以1-2 月分最低,8 月份最高,其相差約 25cm。 因此,本文欲利用海溫對水位的長週期變化,進行模糊-類神經網 路之建構。又從上述之分析結果,花蓮與其他海域的長週期水位變化 相似之故,本文將僅預測花蓮的水位結果代表其他測站的之長周期水 位,由此進行整個潮汐水位變化的分析與預測。
圖5-1 2001-2002 年之水位與海溫月移動平均之變化圖 表5-1 花蓮與其他測站實測長周期水位與海溫的相關性 TC SA CG LY HS CE 0.71 0.73 0.43 0.55 0.77 TP JHU TaiC KH HC CE 0.01 0.80 0.65 0.76 0.73 圖 5-2 花蓮與頭城之實測水位月移動平均(2001-2002) Temperature Water level
圖 5-3 花蓮與蘇澳之實測水位月移動平均(2001-2002)
圖 5-4 花蓮與成功之實測水位月移動平均(2001-2002)
圖 5-6 花蓮與新竹之實測水位月移動平均(2001-2002)
圖 5-7 花蓮與台北之實測水位月移動平均(2001-2002)
圖 5-9 花蓮與台中之實測水位月移動平均(2001-2002)
圖 5-10 花蓮與高雄之實測水位月移動平均(2001-2002)