國立交通大學
機械工程學系
碩士論文
片狀彈性支承之設計及應用
The Design and Application of Plate-Type Elastic
Damper
研究生:黃聖傑
指導教授:金大仁 教授
片狀彈性支承之設計及應用
The Design and Application of Plate-Type Elastic Damper
研究生:黃聖傑 Student:Sheng-Chieh Huang 指導教授:金大仁 博士 Advisor:Tai-Yan Kam
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering
College of Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Mechanical Engineering
December 2007
Hsinchu, Taiwan, Republic of China
片狀彈性支承之設計及應用 研究生:黃聖傑 指導教授:金大仁 博士 國立交通大學機械工程學系 碩士班 摘 要 本文重點分兩部份。第一部份為彈性支承的研製,為解決傳統彈波在大 變形下其彈性係數呈非線性變化的問題,製作一碳纖片狀彈性支承,利用 最佳化程式對彈性支承之幾何形狀做最佳化設計,使揚聲器系統之最低共 振頻率降低,且能夠於大功率下穩定運動。由於本文使用圓形平面揚聲板, 其聲壓曲線在中音域 1kHz 附近有一聲壓落差,因此第二部份將利用立體加 勁方式加強揚聲板之剛性,使中音谷發生的位置往高頻移動,以增加揚聲 器在中低音域的實效頻寬。在理論分析上,利用有限單元軟體 ANSYS 研究 加勁振動板之振動行為,並比較不同加勁振動板振形與聲壓曲線的影響, 找出最適合之加勁長度,並以實驗加以驗證。
The Design and Application of Plate-Type Elastic Damper
Student:Sheng-Chieh Huang Advisor:Dr. Tai-Yan Kam
Department of Mechanical Engineering National Chiao Tung University
ABSTRACT
Two parts are discussed in the thesis. The first part is the fabrication of the elastic dampers. In order to tackle the nonlinear problem of traditional damper’s translational stiffness, a plate-type elastic damper is developed for flat panel speakers. The shape of the plate-type elastic damper is optimally designed and carbon fiber epoxy composite material is used to make the plate-type elastic damper. The use of the plate-type damper can make the radiating plate vibrate steadily. For a circular flat panel speakers, there is a dip in mid frequency range on the sound pressure level (SPL) curve. Such dip can be harmful to the sound quality of the loudspeaker. Therefore, in the second part of the thesis a method is proposed to increase the plate stiffness and raise the frequency of the dip in mid frequency range. The finite element model of the loudspeaker is constructed through the FE software ANSYS. The mode shapes of the radiating plate with added carbon fiber epoxy stiffeners are analyzed using ANSYS. The appropriate lengths of the stiffeners are determined to expand the low to mid frequency range with flat response on the SPL curve. Experiments are performed to verify the feasibility of the proposed design method in the design of circular flat panel loudspeakers.
誌 謝 在這兩年半的碩士班求學生涯過程,充滿許多難忘的回憶,對我的人生 影響重大,首先要感謝指導教授金大仁博士對我在課業及研究方法上的細 心指正與諄諄教誨,讓我培養出正確的求學態度,順利完成本篇論文,在 此獻上最誠摯的謝意。 感謝我的父母從小到大對我無微不至的照顧,以及姊姊、妹妹的鼓勵與 支持,讓我順利無憂的完成碩士班學業。還要感謝偉芬學姐、清榮學長、 志明學長、昌毅學長、于昇學長、崧任學長、建郎學長、維成學長、慶博 學長、欣翰學長、哲瑋學長、建勳學長、宗鴻學長在課業、生活及研究上 的種種指導與協助,以及同窗好友永立、魁原、國真、融崧、捷凱的互相 切磋與勉勵,使我在求學的過程中不感孤單,另外也要感謝學弟志傑、建 儒、宏銘、政霖、致翔、秉達、恩寶、奕樵在各方面的幫助,並要感謝幫 助過我的人,最後僅將本文獻給我的家人、師長與朋友。 聖傑 2008. 于交大
目 錄 中文摘要 ……… i 英文摘要 ……… ii 誌謝 ……… iii 目錄 ……… iv 表目錄 ……… vi 圖目錄 ……… vii 一、 緒論……… 1 1-1 前言……… 1 1-2 文獻回顧……… 2 1-3 研究動機與方法……… 4 二、 複合材料疊層板的振動分析……… 6 2-1 一階剪變形平板理論……… 6 2-2 瑞雷-黎次法(Rayleigh-Ritz method)………. 9 2-3 平板之有限元素分析……… 12 2-4 特徵值與特徵向量……… 15 2-5 受外力的振動系統……… 16 三、 有限元素分析模擬與聲壓計算……… 18 3-1 ANSYS 有限元素模型之建立……….. 18 3-1.1 模擬元素之選擇……… 18 3-1.2 ANSYS 模型建立步驟……….…. 18 3-2 ANSYS 模擬分析中各參數之取得……….…. 21 3-2.1 質點元素的參數……… 21 3-2.2 彈簧元素的參數……… 21 3-2.3 激振力的給定……… 22 3-2.4 阻尼比的給定……… 22 3-3 聲壓的計算及應用……… 23 3-4 ANSYS 模型之驗證……….. 26 3-4.1 模擬元素的選擇……… 26 3-4.2 非線性懸臂梁模擬的驗證……… 26 3-4.3 聲壓模擬的驗證……… 27 四、 最佳化總域極小化理論……… 28 4-1 最佳化設計……… 29
4-2 多起始點方法……… 30 4-3 區域極小化程序……… 31 4-4 總域極小化程序……… 33 4-5 廣義拉格蘭吉乘子方法……… 34 五、 片狀彈性支承之最佳設計……… 35 5-1 彈性支承之功能……… 36 5-2 碳纖片狀彈性支承……… 37 5-3 彈性支承幾何形狀之最佳化設計……… 38 5-3.1 最佳化法之建立……… 38 5-3.2 彈性支承設計與拉伸實驗結果……… 40 六、 平面揚聲器之研製與實驗……… 42 6-1 揚聲器製作……… 42 6-1.1 彈性矽膠懸邊之製作……… 42 6-1.2 音圈與場磁鐵之製作……… 43 6-1.3 平面揚聲器之製作……… 43 6-2 揚聲器各種實驗程序……… 43 6-2.1 阻尼量測實驗……… 43 6-2.2 聲壓量測實驗……… 44 6-2.3 阻抗量測實驗……… 45 6-2.4 參數量測實驗……… 45 6-3 中音谷產生的原因……… 46 6-4 碳纖立體加勁振動板……… 47 6-4.1 ANSYS 模擬立體加勁……….. 48 6-4.2 實驗驗證……… 49 七、 結論與未來研究方向……… 51 7-1 結論……… 51 7-2 未來研究方向……… 52 參考文獻 ……… 53
表 目 錄 表 3-1 ANSYS 模擬之材料常數………. 55 表 3-2 平面揚聲器量測參數………... 55 表 3-3 文獻[2]中的材料常數……….. 56 表 3-4 文獻[2]與 ANSYS 各元素自然頻率分析比較………... 56 表 3-5 文獻[7]與 ANSYS 模擬比較……… 57 表 5-1 最佳化之設計變數最佳值………... 57 表 5-2 最佳化之彈性支承 ANSYS 模擬之力與位移關係……… 58 表 6-1 音圈規格表………... 58 表 6-2 場磁鐵規格表………... 58 表 6-3 ANSYS 模擬立體加勁之彎矩模態頻率與中音谷聲壓落差……. 59 表 6-4 x 軸向固定 19mm 加勁與 y 軸之不同加勁長度比較……… 59 表 6-5 y 軸向固定 19mm 加勁與 x 軸之不同加勁長度比較……… 59
圖 目 錄 圖 1-1 傳統振動板為錐盆型的揚聲器……… 60 圖 1-2 振動板為平面的揚聲器……… 60 圖 1-3 傳統半月型波浪彈波……… 61 圖 2-1 平板所受應力的合力圖……… 61 圖 2-2 半徑為 a 公尺之具彈性支撐圓形板……… 62 圖 2-3 頻率-位移圖………... 62 圖 2-4 Rayleigh Damping……….. 63 圖 3-1 ANSYS 模擬 model……… 63 圖 3-2 平面揚聲器阻抗圖……… 64 圖 3-3 以雷射測速儀量測振動板中心點位移響應……… 65 圖 3-4 聲壓距離示意圖……… 66 圖 3-5 ANSYS 模擬與文獻[7] 之力與位移比較……… 66 圖 3-6 純巴桑木振動板揚聲器實驗與 ANSYS 模擬比較………. 67 圖 4-1 能量守恆觀點最小值示意圖……… 67 圖 4-2 區域極小化流程圖(BLOCK 1) ……… 68 圖 4-3 總域極小化流程圖……… 69 圖 4-4 A.L.M.區極小化流程圖(BLOCK A) ………... 70 圖 5-1 振動板之振形……… 71 圖 5-2 揚聲器結構……… 71 圖 5-3 傳統波浪圓形彈波之力與位移示意圖……… 72 圖 5-4 碳纖壓製疊層順序……… 72 圖 5-5 熱壓機……… 73 圖 5-6 複合材料積層板之加熱加壓硬化成型製程圖……… 73 圖 5-7 ㄇ字形彈性支承……… 74 圖 5-8 ㄇ字形彈性支承之力與位移示意圖……… 74 圖 5-9 具波浪形彈性支承……… 75 圖 5-10 具波浪形彈性支承之力與位移示意圖……… 75 圖 5-11 彈性支承設計變數示意圖……… 76
圖 5-12 ANSYS 模擬之力-位移示意圖………. 76 圖 5-13 最佳化彈性支承幾何形狀示意圖……… 77 圖 5-14 ANSYS 模擬最佳化彈性支承之力-位移關係圖………. 77 圖 5-15 片狀碳纖彈性支承成品……… 78 圖 5-16 拉伸實驗:片狀彈性支承之力與位移示意圖……… 79 圖 6-1 彈性矽膠懸邊完成品……… 79 圖 6-2 揚聲器製作完成品……… 80 圖 6-3 阻尼比量測實驗架設示意圖……… 80 圖 6-4 聲壓量測實驗架設圖……… 81 圖 6-5 平面揚聲器阻抗圖……… 81 圖 6-6 揚聲器參數計算……… 82 圖 6-7 具碳纖彈波巴沙木振動板與 ANSYS 模擬之聲壓曲線………. 82 圖 6-8 具碳纖支承巴桑木振動板自然頻率圖……… 83 圖 6-9 具碳纖支承之剛體振動板 ANSYS 模擬圖………. 84 圖 6-10 ANSYS 模擬剛體振動板振形圖……….. 85 圖 6-11 碳纖平面加勁示意圖……… 85 圖 6-12 慣性矩說明……… 86 圖 6-13 碳纖立體加勁位置示意圖……… 86 圖 6-14 巴桑木與 11mm 立體加勁聲壓圖……… 87 圖 6-15 巴桑木與 19mm 立體加勁聲壓圖……… 87 圖 6-16 巴桑木與 27mm 立體加勁聲壓圖……… 88 圖 6-17 立體加勁與彎矩模態圖……… 88 圖 6-18 碳纖加勁長度與彎矩模態頻率關係……… 89 圖 6-19 碳纖加勁長度與中音谷落差關係……… 89 圖 6-20 碳纖立體 y 軸不同加勁位置示意圖……… 90 圖 6-21 19mm 與 y 軸不同加勁位置聲壓圖………. 90 圖 6-22 碳纖立體 x 軸不同加勁位置示意圖……… 91 圖 6-23 19mm 與 x 軸不同加勁位置聲壓圖………. 91 圖 6-24 改變 x、y 軸之彎矩振形頻率比較………... 92 圖 6-25 改變 x、y 軸之中音谷落差比較………... 92
圖 6-26 具立體碳纖加勁振動板……… 93 圖 6-27 碳纖立體加勁板實驗聲壓圖……… 93 圖 6-28 19mm 加勁板與碳纖三明治板聲壓比較………. 94 圖 6-29 ANSYS 模擬之彈性支承變形振動模態……….. 94 圖 6-30 加泡棉之碳纖彈性支承……… 95 圖 6-31 19mm 加勁板與彈性支承加泡棉之比較………. 95
一、 緒 論
1-1 前言 複合材料是指結合兩種或以上不同之物質,將以結合,擷取原材料之 特性與優點,製成性能優異並能滿足需求的一種新材料。複合材料之構成 有兩大要素: 一為基材(matrix),另為補強材料(reinforcement)二者予以複 合,以獲得符合設計需求的新材料,其中以纖維強化的複合材料應用較廣, 此種材料在纖維方向具有相對於同等密度之材料較高強度、高勁度之特性, 所以可以透過不同疊層的角度或不同的疊層方式之設計來達到實際需求上 具備輕質量、高強度、設計上變化性大的材料。目前複合材料已被廣泛的 應用在航太、造船、飛彈、汽車、休閒運動器材等對於重量敏感及有高強 度需求的結構上。 近年來,受到電視與顯示器的平面化影響,所搭配的揚聲器也由傳統 之錐盆式揚聲器(圖 1-1)改為平面式揚聲器(圖 1-2),而平面揚聲器的揚聲板 也逐漸由單一材料構成之振動板,改以玻纖或碳纖加勁之揚聲板取代。而 振動板之特性可說是揚聲器品質優劣的重要判斷因素之一。優異的振動板 必須有兩大特點,一為高剛性,使振動過程中之板變形量十分微小,進而 產生平穩之聲壓值;二為重量輕,能夠以較小之出力產生相同或更高之輸 出功率,即可減少輸入訊號之功率,而達到低耗電量、省電的優勢。 決定揚聲器品質優劣之另一個重點為其懸吊系統。揚聲器作動時為往 復的簡諧運動,必須提供一個穩定的懸吊系統使其音圈可以在磁隙中能夠 穩定的運動,不使音圈產生偏擺,而不至於產生不悅耳的雜音。以揚聲板 運動之方式可大致分為兩種區域。一為系統共振頻率(fo)附近之剛體運動,二為fo 之後高頻揚聲板變形。當激振頻率到達系統共振頻率 fo 之後,因揚 聲板產生大位移,揚聲器才會有一個平穩之聲壓值,所以可以將fo 稱為揚 聲器之起始頻寬,因此,若需要此揚聲器有良好的低音表現,必須將fo 降 低至所需之目標。而揚聲板在受激振時,亦會發生共振模態,使得揚聲板 產生局部的變形,會產生不同的振幅與相位,因此揚聲板作動時不再是一 個剛體運動,若當有反相位振形發生時,會減少推動空氣的體積,因而降 低了聲壓,因此揚聲板之變形會對聲壓產生不良的影響。 傳統圓形波浪紋彈波(如圖 1-3)在大變形時的彈性係數,呈現非線性現 象,造成高瓦數及大衝程時揚聲器失真的效應;且在長時間往復振動使得 彈波上不織布以及熱塑膠有龜裂現象,為了解決這些缺點,本文目的在設 計一個揚聲器彈波,使其在低頻保持穩定振動輸出,討論重點為利用最佳 化程式去設計一個片狀彈性支承,並降低 值。另一方面研究碳纖支承的 立體加勁,有效地提高揚聲板的剛性與中音谷發生的頻率,使得揚聲器有 更大的實效頻寬。 0 f 1-2 文獻回顧
在分析平板的理論方面,從古典板理論(Classical Plate Theory,簡稱 CPT)[1]改進而成的古典積層板理論(Classical Lamination Theory),對於複合
材料薄板的力學分析已能得到不錯的結果,但只適用於長厚比大於60 之平
板;對於厚板而言,由於複合材料積層板之側向剪力模數(Shear modulus) 比沿纖維方向的楊氏係數(Young’s modulus)低很多,且在厚度上較薄板高出 許多,因此容易產生側向剪變形,所以古典板理論不適合分析較厚之複合 材 料 板 。 為 此 ,Mindlin 提 出 了 一 階 剪 變 形 理 論 (The First-order Shear
Deformation Theory,簡稱 FSDT)[2],首先將側向剪力的影響加以考慮,但 是因為假設側向剪力分布為常數,並不符合實際的情況,於是Whitney[3、 4]便提出了剪力修正因子來加以修正,此種理論比較適合用在長厚比大於 15 的結構上;之後,學者又提出了各種高階剪變形的理論,雖有提高理論 值與實際狀況相比之準確性,但往往較適用於厚板結構(長厚比大於 15) 之情況,且其計算上比較複雜許多,而本文中使用之圓形揚聲板並不在厚 板結構的範圍內,所以仍以一階剪變形理論為主,來分析振動板之變形行 為。 在振動方面,有關振動模態分析與多自由度振動響應系統之運動方程 式,參考書藉作者為 Thomson[5]、王栢村[6]等。Demeter[7]則是介紹梁、 板等的非線性靜力以及振動理論。文獻 [8~11] 是介紹一般工程最佳化概 念,隨著複合材料的廣泛使用與結構可靠度評估而逐漸受到重視與矚目, 許 多 知 名 學 者 將 工 程 最 佳 化 運 用 在 複 合 材 料 力 學 領 域 之 相 關 研 究 , Deobald、Gibson[12]及 Frederiksen [13] 以里茲(Rayleigh-Ritz)模態分析 方法及數值迭代方式、最佳化方式決定複合材料之彈性常數,而[14]則應用 最佳化方法識別不同型式彈性支承結構之系統參數。 對於聲學與聲壓計算方面,Morse[15]中推導出了聲源在空氣中傳遞之 聲壓方程式,在Takeo[16]中引用出有限元素之聲壓方程式,而 Tan[17]中討 論了藉由促動器(actuator)主動控制對平板之聲場的影響,文獻[18]中陳述了 關於揚聲器量測的各參數的討論,文獻[19]中討論圓板之振動與聲傳,[20] 則是說明在不同位置附加質量對聲壓曲線的影響。 ANSYS 為泛用型有限元素分析軟體,已被廣泛應用於學術界與工業 界,包括結構應力、振動、熱傳、流體、電磁場、聲場等分析,文獻[21] 利
用ANSYS 模擬之平面揚聲器振動板材料參數對聲壓之影響。本文也將利用 ANSYS 分析振動板之自然模態與振形,結合聲壓計算,分析出揚聲器之聲 壓曲線,進而改善揚聲器之表現。 1-3 研究方法 為了讓揚聲器的低音有更好的表現及更大的有效頻寬,本文以盡量壓 低揚聲器的起始頻率 為前提,研製出適合的揚聲器彈波,支撐住音圈、 振動板,使其能定向、定位,且保持固定方向的往復運動。而在第一個自 然頻率 之後,則因為振動板的振動模態變形,造成振動板推動的空氣有 正有負互相抵消,使得聲壓會有某一段突然下降,稱之為中音谷。為改善 中音谷問題,以往提高對振動板剛性的加勁方式是在整面巴桑木板上下各 黏一片碳纖基層板,此種兩片碳纖夾一層巴桑木的結構一般稱之為三明治 結構,但是由於加勁的面積及質量太大使得揚聲器感度下降,降低了整個 揚聲器的增益。而碳纖支承垂直加勁之慣性矩較平面加勁為大,更能有效 地抑制振動板因中高頻部份的變形造成的音谷。本文即是使用最佳化程式 去設計一個片狀彈性支承,使其在適當的振幅下彈性係數為線性範圍,改 善傳統彈波在大變形下的非線性影響;另一方面使用碳纖複合材料做立體 加勁方式提高振動板剛性,使揚聲器之實效頻寬增加,並討論其不同加勁 方式振動板振形與聲壓的影響。 0 f 0 f 在實驗部分,根據既定尺寸直徑 84mm 之揚聲板(如圖 1-2),嘗試不同 加勁方式,並將最佳化設計出來的片狀彈性支承以碳纖在 150 度高溫熱壓 成形,組合製作出圓形平面揚聲器,利用 PULSE 訊號分析儀及 Polytec OFV350 雷射測速儀量測揚聲器系統之自然頻率,並由 LMS 聲壓頻譜儀量
測聲壓曲線及阻抗,記錄聲壓曲線並與儀器量測之阻抗圖、測速儀之頻譜 圖比較結果是否一致。 分析方面,以 ANSYS 有限元素分析軟體建立一個與實體幾何相同的模 型,繼而分析結構之自然頻率、模態,將分析出來的自然頻率與實驗數值 比較,驗證模型的正確性;接著再進行簡諧激振分析,計算出不同激振頻 率下振動板所有節點之振幅及相位角,輸入由Fortran 程式所寫成的聲壓公 式計算聲壓並由繪圖軟體繪製出聲壓曲線,將曲線與實驗結果相對照,以 求模型能真實模擬出實際狀況。當整個模型驗證無誤之後,開始嘗試在不 同長度之ㄇ字形加勁,探討振形與聲壓之關係,以求平滑之聲壓曲線,再 由實驗驗證是否與分析吻合。
二、 複合材料疊層板的振動分析
由於本文使用之振動板直徑為 84mm,厚度為 2mm,符合一階剪變形 理論長厚比需大於15 的條件,因此使用一階剪變形來進行分析。而求平板 之振動頻率常用的方法有兩種:瑞雷-黎次法(Rayleigh-Ritz method)以及有限 元素分析,本章將敘述一階剪變形平板理論之基本假設、應力與應變關係 以及兩種振動分析的基本理論。 2-1 一階剪變形平板理論一階剪變形理論 FSDT ( The First Order Shear Deformation Theory )來作 為積層板分析的基礎,其基本假設如下: 1. 板的長、寬為板的厚度的 15 倍以上。 2. 板的截面變形後仍保持平面。 3. 厚度仍保持不變,即 =0。 εz 4. 板的變形量 u, v, w 很小。 其位移場的假設如下: u =u0(x,y,t)+ zθx(x,y,t) v=v0(x,y,t)+zθy(x,y,t) (2.1) w=w(x,y,t) 而應變場如下:
0 6 0 6 x y, y x, x 0, y 0, 6 x x , 5 y y , 4 0 2 0 2 y y, y 0, 2 0 1 0 1 x x, x 0, 1 zκ ε ) θ z(θ ) v (u x v y u ε θ w z u x w ε θ w z v y w ε zκ ε zθ v y v ε zκ ε zθ u x u ε + = + + + = ∂ ∂ + ∂ ∂ = + = ∂ ∂ + ∂ ∂ = + = ∂ ∂ + ∂ ∂ = + = + = ∂ ∂ = + = + = ∂ ∂ = (2.2) 其中 、v、w 分別代表平板在 x、y、z 方向之位移量,t 代表時間, 、 分別代表平板中間面在 x、y 方向上的位移,而 u u0 v0 x w θx ∂ ∂ − = 、 y w θy ∂ ∂ − = 是剪 應變所產生之旋轉量(Shear Rotation)。 而中間面之曲率為 y x w 2 κ y w κ x w κ 2 0 6 2 2 0 2 2 2 0 1 ∂ ∂ ∂ − = ∂ ∂ − = ∂ ∂ − = 而平板之應力應變關係如下: σ5×1 =Q5×5ε5×1 (2.3) 其中 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = × 55 44 66 22 12 12 11 5 5 Q 0 0 0 0 0 Q 0 0 0 0 0 Q 0 0 0 0 0 Q Q 0 0 0 Q Q Q (2.4) 且
) v v (1 E Q 21 12 1 11 = − ) v v (1 v E Q 21 12 12 2 12 = − ) v v (1 E Q 21 12 2 22 = − Q66 =G12 (2.5) Q44 =G23 Q55 =G13 其中Qij為彈性係數,Ei 為楊氏模數,vij為蒲松比,Gij為剪力模數。 考慮單層平板(如圖2-1),其合力與合力矩為 (2.6) 0 j ij 0 j ij 0 j 2 h/2 h/2 -0 j ij 2 / h/2 - ij ij 0 j ij 0 j ij 0 j h/2 h/2 -0 j ij 2 / h/2 - ij ij κ D ε B )dz κ z (zε Q dz ε zQ M κ B ε A )dz zκ (ε Q dz ε Q N + = + = = + = + = =
∫
∫
∫
∫
h h 其中 (2.7)∫
∫
∫
− − − = = = = h/2 h/2 2 ij ij h/2 h/2 ij ij h/2 h/2 ij ij dz z Q D ) 6 , 2 , 1 , ( zdz Q B dz Q A j i 上式h為平板厚度,h/2即為薄板表面到中間面的距離,分別代表拉伸、偶合、彎曲勁度矩陣(Extensional Stiffness Matrix、Coupling
Stiffness Matrix、Bending Stiffness Matrix),將合力及合力矩寫成矩陣形式如
下: ) 6 , 2 , 1 , ( D , B , Aij ij ij i j= (2.8) ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ + + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ x y, y x, y y, x x, x 0, y 0, y 0, x 0, 66 26 16 66 26 16 26 22 12 26 22 12 16 12 11 16 12 11 66 26 16 66 26 16 26 22 12 26 22 12 16 12 11 16 12 11 6 2 1 3 2 1 θ θ θ θ v u v u D D D B B B D D D B B B D D D B B B B B B A A A B B B A A A B B B A A A M M M N N N
2.2 瑞雷-黎次法(Rayleigh-Ritz method) 對於半徑為a公尺之彈性支撐圓板的情形,可模擬成如圖2-2所示,邊 界之彈性支承以橫向(Translation)及旋轉(Rotation)彈簧加以表示,此系統所 具有之最大應變能為Umax,可表示如下: Umax =Up +Ut +Ur (2.9)
{ }
[ ]
{ }
∫
∫
∫∫
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = = = π π θ θ 2 0 2 2 0 2 2 2 2 1 d r W k a U d W k a U dA W D W U r r t t A T p (2.10) 其中 、 、 各代表圓板之應變能、圓板邊界上彈性支撐之橫向及旋轉應變能。 、 代表線性剛性(translational stiffness)和旋轉剛性(rotational
stiffness)。而位移函數(deflection function)W 表示為下式:
p U Ut Ur t k kr
{ }
T 2 2 2 2 2 y x 2 W y W x W W ⎪ ⎪ ⎪ ⎭ ⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ ∂ ∂ ∂∂ ∂∂ ∂ = (2.11) 而系統最大動能為Tmax,可表示為下式: =∫∫
A 2 2 A W h 2 1 Tmaxρω
d (2.12) 分別將(2.10)、(2.12)無因次化,整理如(2.13)、(2.14)式: ={
∫∫
{ }
[ ]
{ }
A T W D W a D U ξ η α d d 2 1 2 0 max⎭ ⎬ ⎫ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + +
α
∫
2πθ
α
∫
πθ
0 2 0 2 r 2 t 0 r k D k D d W a d W a 0 3 (2.13)λ
ξ
η
α
d d max =∫∫
A 2 2 2 0 W a D 2 1 T (2.14) 利用Rayleigh-Ritz method將位移函數表示如下:∑∑
( ) ( ) = = Ψ Φ = 0 0 ) , ( m n n m mn C W ξ η ξ η (2.15) 其中C 為待定係數,mn Φ( )ξ 、Ψ(η)係由 Gram-Schmidt 正交化法所產生的多項式函數(polynomial function),亦是所謂之形狀函數(shape function)。而其他
無因次化定義如下: a x =
ξ
b y =η
b a =α
2 1 0 4 2 D a h ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =ρ
ω
λ
) ( 3 1 0 1 12 h E Dν
ν
− = 21 12 故複合材料層板的總能量泛函Π可表示為: Π = U−T (2.16) 若以一階剪變形理論分析,此系統之最大應變能Vmax: Vmax =Vp + +Vt Vr (2.17)[ ] [ ]
[ ]
[ ]
A Q [( ) ( ) ( )] A T p V T V 2 2 2 2 44 4 55 5 45 4 5 11 1 22 2 66 6 12 1 2 16 1 6 26 2 6 1 V dV 2 1 dV 2 1 A A 2 A D D D 2 2 D D D dσ
ε
ε
ε
2ε
ε
ε ε
κ
κ
κ κ
κ κ
κ κ
= ⎡ ⎤ = ⎣ ⎦ = + + + + + + + +∫
∫
∫
κ
其中4 y 5 x y y x x 1 2 6 w w y x x y x
ε
θ
ε
θ
θ
θ
yθ
θ
κ
κ
κ
∂ ∂ = + = + ∂ ∂ ∂ ∂ ∂ ∂ = = = + ∂ ∂ ∂ ∂ (2.18) =∫
2πθ
0 2 t t kW d 2 a V (2.19) 2 ( )2 r S n 0 r 1 a w V M dS k 2 2 r π dφ
∂θ
= = ∂∫
∫
(2.20) 而系統最大動能為Tmax: 2 max 2 A V ( ) [( ) ] A V 2 2 2 2 2 2 x y V 2 2 2 2 x y 1 T dV 2 1 z z w d 2 h h w d 2 12ρ
ρλ
θ
θ
ρ λ
θ
θ
= = + + = + +∫
∫
∫
V (2.21) 故總位勢能可寫成π
=VP +VT +VR −Tmax (2.22) 而shape function可整理如下:( )
( ) ( )( )
( ) ( )( )
ymn ( ) ( )m n y l k xkl x j i wij C C C η ξ η ξ η ξ η ξ θ η ξ θ η ξ ω Ψ Φ = Ψ Φ = Ψ Φ =∑∑
∑∑
∑∑
, , , (2.23) 將(2.23)代入(2.22),並使用Ritz method 求待定係數,令( )
0 C = ∂ ∂ wijπ
( )
0 C = ∂ ∂ xklπ
( )
0 C = ∂ ∂ ymnπ
(2.24) 其中i,j,k,l,m,n=0,1,2,K,I,J,K,L,M,N 可求得系統之特徵方程式:(
[ ]
− 2[ ]
)
{ } { }
= 0 C M K ω (2.25) 求解上式,可得ω即為無因次之自然角頻率。2-3 平板之有限元素分析 將平板的虛功方程式以 n 個元素的組合來表示:
∑ ∫
∫
∫
= = − + n 1 k V V A k i i ij ij i i e e e 0 dA} F δu dV ε σ δ 2 1 dV u ρ δu { && (2.26) 其中,每個節點都有五個自由度,我們以等參單元的形狀函數(Shape Function)來表示位移場: u0 =Niui v0 = Nivi w = Niwi θx = Niθxi θy =Niθyi (2.27) 對各元素來說,其位移可用下式來表示:∑
(2.28) = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ m 1 i yi xi i i i i i i i i θ θ w v u 0 0 N 0 0 zN 0 0 N 0 0 zN 0 0 N w v u 也可寫成: =∑
∇i = m 1 i i I N u~ (2.29) 其中m是每一個元素中之節點數,Ni是元素之形狀函數,I是一個 5×5的 單位矩陣,∇i 是節點位移,∇i ={ui,vi,wi,θxi,θyi}T。 對(2.27)式的導數 y , x ∂ ∂ ∂ ∂ 可得: u0,x =Ni,xui u0,y =Ni,yui v0,x =Ni,xvi v0,y =Ni,yvi w,x = Ni,xwi w,y =Ni,ywi (2.30)θx,x =Ni,xθxi θx,y =Ni,yθxi θy,x =Ni,xθyi θy,y =Ni,yθyi 將(2.30)式代入應變場: 0 1 0 1 x x, x 0, 1 u zθ ε zκ x u ε = + = + ∂ ∂ = 0 2 0 2 y y, y 0, 2 y v zθ ε zκ v ε = + = + ∂ ∂ = 4 w,y θy z v y w ε = + ∂ ∂ + ∂ ∂ = 5 w,x θx z u x w ε = + ∂ ∂ + ∂ ∂ = 0 6 0 6 x y, y x, x 0, y 0, 6 x (u v ) z(θ θ ) ε zκ v y u ε = + + + = + ∂ ∂ + ∂ ∂ = (2.31) 可得應變—位移關係如下: (2.32) ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ yi xi i i i i x i, i y i, x i, x i, x i, y i, x i, y i, x i, x i, 5 4 6 2 1 θ θ w v u 0 N N 0 0 N 0 N 0 0 zN zN 0 N N zN 0 0 N 0 0 zN 0 0 N ε ε ε ε ε 可寫成: [ε]=[B][∇i] (2.33) 其中 [B]=∂[Ni] 由有限元素法得知元素勁度矩陣為: =
∫
v T (2.34) e] [B] [E][B]dV [K 其中[E]為材料特性矩陣。再由(2.26)及(2.29)式,可用下列各式表示任意元素之各項虛功: V δuiρuidV (δ e)TMe e e ∇ ∇ =
∫
&& && (2.35) e T eL e V (σijεij)dV (δ ) K δ 2 1 e ∇ ∇ =∫
(2.36) e T e AeδuiFidA (δ ) F ∇ =∫
(2.37) 其中 { 1, 2,...., q} e ∇ ∇ ∇ =∇ ,Me 是元素質量矩陣(Element Mass Matrix),KeL是
元素勁度矩陣(Element Bending Stiffness Matrix),Fe是元素之點負載向量
(Vector of Element Nodal Force)。
而具邊界彈性支承平板之虛功方程式以n個元素加上 p個邊界節點組 合可表示為:
{
}
0 dA} F δu dV ε σ δ 2 1 dV u ρ δu { 1 n 1 k V V A k i i ij ij i i e e e = + + − +∑ ∫
∫
∑ ∫
∫
∫
= = p q s s q q Rq q q Tq ds k ds k ω δω θ δθ && (2.38) 將邊界彈性支承之虛功方程式可整理如下: S S R S s Rq q q S S T S s Tq q q k ds k k ds k θ θ δ δθ θ ω ω δ δω ω ) ( ) ( = =∫
∫
(2.39) 其中 S T k 、kSR代表邊界節點之線性剛性(translational stiffness)和旋轉剛性 (rotational stiffness)矩陣,ωS 及θS 為邊界節點位移與旋轉角度矩陣,p為邊 界節點總數。 最後將所有元素矩陣組合起來,則具邊界彈性支承平板之有限元素分 析模型的平衡方程式如下: M∇&& +K∇=F (2.40) 其中M、K、F、∇分別代表廣義的質量矩陣、勁度矩陣、載荷向量和位移向量。接下來說明外力為零以及受外力時的振動系統。 2-4 特徵值與特徵向量 一般探討結構系統的基本模態,係假設為無阻尼狀態下的自由振動模 態,其運動方程式可寫為: [M]{X&&}+[K]{X}=0 (2.41) 其中,[M]為質量矩陣;[K]為勁度矩陣;{X}為位移向量;而對任何線性結 構系統而言(該系統之受力與變形關係為線性),上式中之[M]、[K]均為實數 對稱(Real Symmetric)矩陣。 求解任何線性結構系統時,通常假設在結構系統中,各不同部位之振 動為簡諧運動,且其振頻與相位均為相同,即 {X}={Φ}eiwt (2.42) {X&&}=−ω2{X}=−λ{X} (2.43) 其中{Φ}為實向量; 為簡諧運動之角頻率;ω λ=ω2 。代回式(2.41)可得: ([K]−ω2[M]){Φ}eiwt ={0} (2.44) 上式中{Φ}有非零解之條件為[K]-ω [M]2 為奇異性(Singular),亦即為: det|[K]−ω2[M]|=0 (2.45) 上式即為此系統之特徵方程式,ω 為系統之第r r 各自然頻率,求解上式即 可得平板之自然頻率,而相對應之{Φ 為特徵向量,寫成矩陣型式為:}r , ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ω O O 0 0 2 r [Ψ =] [{Φ}1L Φ{ }rL]
2-5 受外力的振動系統
假設此系統具有比例阻尼(Proportional Damping)
[C]=α[M]+β[K] (2.46)
其中α、 將以下述之β Bandwidth Method和Rayleigh Damping 取得:
(一)Bandwidth Method 如圖2-3所示,為一振動板中心之頻率-響應圖,其中Peak response 為 某一共振頻率相對應之振幅, f 及1 f 為曲線和2 peak/ 2 之交點。利用下式 求得共振頻率之阻尼比: 2 2 1 1 f f f f
ξ
= − + (2.47)ξ
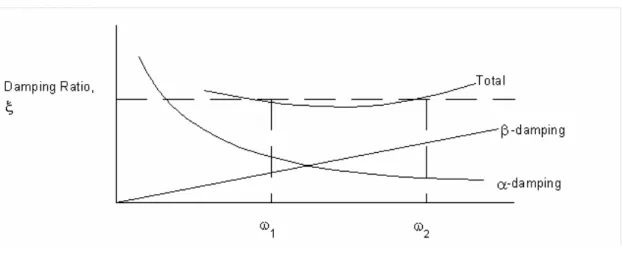
為此共振頻率之阻尼比。 (二)Rayleigh Damping 由Bandwidth Method得到每一共振頻率相對應之阻尼比後,可從任二 組共振頻率響應得到系統阻尼比(如圖 2-4 所示)。利用下式可以求得系統 α-damping和 β-damping: ( ) ( i ) i i 2 2α
ξ
= Ω +β
Ω (2.48) ξi:第i個模態之阻尼比 Ωi:第 i個模態之角自然頻率 α:與質量矩陣有關的阻尼比 β:與勁度矩陣有關的阻尼比振動系統之運動方程式可寫為:
[M]{X&&}+[C]{X&}+[K]{X}={F}sinϖt (2.49)
因為[M]、[K]、[C]為實對稱矩陣,所以我們可將其對角化為: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = Ψ Ψ O O 0 m 0 ] ][ M [ ] [ 2 r T (2.50) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = Ψ Ψ O O 0 k 0 ] ][ K [ ] [ 2 r T ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = Ψ Ψ O O 0 c 0 ] ][ C [ ] [ 2 r T 我們將{X}=[Ψ]{x}代入(2.49)式並乘上[Ψ 可改寫成為:]T [m ]{x} [c ]{x} [k ]{x} [ ]T{F}sin t r r r && + & + = Ψ ϖ r=1,2,...,n (2.51) 即可求得 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ η + η − η + η + η − η − = 2 r 2 2 r 2 r 2 2 2 r r r ) c 2 ( ) 1 ( c 2 j ) c 2 ( ) 1 ( 1 k F x (2.52) 其中
η ω ω
= / r 因此,系統響應{X}可得: {X}=[Ψ]{x}= n r r (2.53) 1 r x } {∑
= Φ三、 有限元素分析模擬與聲壓計算
上一章敘述求解振動板自然模態與頻率響應之方法,而本文為求計算 速度以及正確性,將利用有限元素分析軟體ANSYS 做揚聲器模擬。本章先 是敘述整個 ANSYS 模型的建立方式、實驗上分析參數的取得,還有陳述 ANSYS 分析模擬揚聲器聲壓曲線時所需要的聲壓公式,最後驗證 ANSYS 模型的正確性。 3-1 ANSYS 有限元素模型之建立 3-1.1 模擬元素之選擇 本節在陳述 ANSYS 有限元素模擬分析揚聲器振動板的過程,其中振動 板部份為單層2mm,將選用符合一階剪變形理論的殼元素 Shell 99 來模擬。 懸邊以及彈波則是以彈簧元素 Spring-damper14 並配合質點元素 Mass21 模 擬彈性係數以及質量,音圈部份則以殼元素 Shell99 加上質點元素 Mass21 模擬,而對設計的彈性支承將選擇可計算大變形的殼元素 Shell93。而彈性 支承的設計以及揚聲器的製作將於第五、六章介紹。 3-1.2 ANSYS 模型建立步驟 前處理部份:1. Preprocessor → Element type:選擇振動板 Shell99(K11=node at bot face),音圈元素 Shell99,彈簧元素 Spring-damper 14,音圈、支承材
料的質點Mass21。
等。
3. Preprocessor → Material Props → Material Models:設定振動板、音圈
以及碳纖彈波之材料性質,如表3-1。
4. Preprocessor → Modeling:由點、線、面建立振動板的模型外觀。 5. Preprocessor → MeshTool:選擇各面積之元素參數、材料性質、各元
素之尺寸大小,並分割元素。
6. Preprocessor → Modeling → Copy → Nodes:將必須建立彈簧的地方偏 移複製,偏移之距離即為彈簧之長度。
7. Preprocessor → Modeling → Create → Elements → Auto Numbered → Thru Nodes:逐一點選以兩個節點為一組之節點來建立彈簧元素,亦 可由迴圈程式輔助完成此重複性動作。
8. Preprocessor → Modeling → Create → Keypoints →on Node:逐一點選
音圈、懸邊部份的位置建立Keypoints。
9. Preprocessor → MeshTool:選擇音圈、懸邊、彈波的元素參數。 10. Preprocessor → Coupling/Ceqn → Coincident Nodes:選取彈波以及彈簧
固定端nodes 限制其自由度。
建立完成的模型(如圖 3-1 所示)。到此前處理即算完成,接下來可以做 模態分析或是聲壓分析部分。
首先說明模態分析部分:
11. Solution → Analysis Type → New Analysis:選擇分析型態,自然頻率 模態分析點選“Modal”。
12. Solution → Analysis Type →Analysis Options:No. of modes to extract 為要分析的模態個數。
13. Solution → Solve → Current Ls:求解。
14. General Postproc →Results Summary:列出所有的自然頻率。
15. General Postproc →Read Results →By Pick:選出想看 Mode Shapes 的 自然頻率。
16. General Postproc →Plot Results →Contour Plot →Nodal Solu:再選 Nodal Solution →Z-Component of displacement,列出 Z 方向的位移。 即可得到自然頻率及模態。
分析聲壓部分如下:
11. Solution → Analysis Type → New Analysis:選擇分析型態,簡諧頻率 響應分析點選“Harmonic”。
12. Solution →Define Loads → Apply → Structural → Force/Moment → On Nodes:在位於音圈位置上的節點施予 Z 方向且相角為零之推力。 13. Solution → Load Step Opts → Time/Frequenc → Damping:輸入系統阻
尼
α
、β
的值。14. Solution → Load Step Opts → Time/Frequenc → Freq and Substps:輸入 欲分析頻率響應之頻寬。
15. Solution → Solve → Current Ls:求解。
16. TimeHist Postpro → List Variables:輸出振動板模型全部節點的振幅及 相角。
由上面簡諧激振分析可得到以下資料: 1. 節點編號 NodeNo(i)及位置 x(i),y(i),z(i)
3-2 ANSYS 模擬分析中各參數之取得 ANSYS 分析模擬上的質點元素、彈簧元素的各參數和模擬音圈激振的 施力皆可由實驗取得。如圖3-2、表 3-2 為圓形平面振動板揚聲器的阻抗圖 和參數值,以下的討論將使用到參數值中的 Mms、Cms 和 BL 值,其實驗 過程將在第五章中做敘述。而系統α-damping 和 β-damping 也可從阻尼量測 實驗中陳述的方法取得。 3-2.1 質點元素的參數 質點元素方面,音圈、支承材料質量可在組裝前直接以電子秤量測, 然後將振動板、音圈、支承材料的所有的質量加總再和參數值中的Mms 值 作比較和驗證,實驗中量測加總的質量和 Mms 的值是吻合的,其中 Mms 值是揚聲器振動板系統之重量,因此可以確認所有的質點元素的參數值是 可以給定的。 3-2.2 彈簧元素的參數 彈簧元素方面,彈簧彈性係數的給定可由參數中的 Cms 值計算出來, 其中,Cms 值指的是系統柔度(compliance)即每牛頓力將可產生的位移。 由參數中Cms=1312.4,所以: 彈簧彈性係數(k)=106/Cms=106/1312.4=761.96 單位:(牛頓/公尺)
3-2.3 激振力的給定 激振器施力方面,第五章中有提及激振力 F=BLI,而 BL 值也可由參數 中取得,I 值為流過激振器線圈的電流,由於線圈阻抗 R 可由三用電錶量出, 而本文量測聲壓時使用標準的量測功率為一瓦,再由公式W=I2R(其中 W 為 功率,I 為電流,R 為阻抗)即可計算出 I 值,因此分析中激振力也是可給定 的。 3-2.4 阻尼比的給定 如圖 3-3 為阻尼量測試驗時量測振動板中心點各頻率的位移圖,文獻 [21]中有討論以不同之阻尼比比較聲壓曲線研究,發現阻尼比對聲壓曲線並 無 嚴 重 之 影 響 , 且 α-damping 對 低 頻 影 響 較 大 對 高 頻 沒 什 麼 影 響 而 β-damping 對高頻影響較大對低頻沒什麼影響,因此,本文取了兩個頻率來
計算α-damping 和 β-damping。其中,包括低頻的第一個自然頻率(如圖 3-3a)
忽略β-damping 的影響來計算 α-damping,還有在高頻區 10KHz 之後找一個 明顯的突起(如圖3-3b)忽略 α-damping 的影響來計算 β-damping。 在第一個自然頻率忽略β-damping 的影響來計算 α-damping 由式 2-47、2-48 可得:
(
(
)
)
04 . 168 54 4 41 68 41 68 = × = + − = α π α ξ (3.1) 在10KHz 後自然頻率忽略 α-damping:的影響來計算 β-damping:(
)
(
)
6 10 46 . 2 2 10270 2 9150 10730 9150 10730 − × = × × = + − = β π β ξ (3.2)3-3 聲壓的計算及應用 依照上述 3-1、3-2 節中敘述的 ANSYS 模型建立的方式和建立 ANSYS 模型過程中需要參數的取得,所建立的ANSYS 模型做簡諧激振分析,可以 得到振動板上各節點的座標和各頻率下各節點的振幅、相角(如 3-1.2 節中 的結果所述),將以上 ANSYS 模擬得到的數據代入本節所推導的聲壓公式, 即可得到振動板在各頻率下的聲壓,即可依此畫出聲壓曲線。 對平面波而言,一維波動方程式為 2 2 2 2 t p c 1 x p ∂ ∂ = ∂ ∂ (3.3) 其中c 為聲音之速度,在常溫24° 時,c=343m/s。利用特徵曲線法(method C of characteristics)可求得 p(x,t)=f1(x−ct)+f2(x+ct) 上式f ,1 f2為任意函數,對於諧波聲場,可直接求解 p~ 0 c dx p~ d 2 2 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ω + (3.4) 令 c k =ϖ ,為波數(wave number),可求得 p~(x)=A~e−ikx +B~eikx (3.5) 還原成時間域的表示法 p(x,t)=A~ei(ωt−kx) +B~ei(ωt+kx) (3.6) 其中A~ ,B~ 為未定複數,對於點聲源而言,3-D 波動方程式在球面座標 (spherical coordinate)為 2 2 2 2 2 2 2 2 2 2 2 2 2 t p c 1 p tan r 1 r p r 2 p sin r 1 p r 1 r p ∂ ∂ = θ ∂ ∂ θ + ∂ ∂ + φ ∂ ∂ θ + θ ∂ ∂ + ∂ ∂ (3.7)
因為點聲源是一個完全對稱的聲源,所以我們可以預期它所產生的聲 場應該不會有方向性,所以可忽略與角度相關的項,所以式(3.7)可以簡化 成 2 2 2 2 2 t p c 1 r p r 2 r p ∂ ∂ = ∂ ∂ + ∂ ∂ (3.8) 其中r為點聲源距量測點的距離。 將上式改寫成: (rp) t c 1 r 1 ) rp ( r r 1 2 2 2 2 2 ∂ ∂ = ∂ ∂ 故 2 2 2 2 2 t ) rp ( c 1 r ) rp ( ∂ ∂ = ∂ ∂ (3.9) 觀察(3.9)式的形式,可以發現它的形式和前面的一維波動方程式是一 樣的,所以其解為 rp=f1(r −ct)+f2(r+ct) 所以 f (r ct) r 1 ) ct r ( f r 1 ) t , r ( p = 1 − + 2 + (3.10) 而一個點聲源只會發出外傳波(outgoing wave), f (r ct) r 1 ) t , r ( p = 1 − (3.11)
對於簡諧球面波(harmonic spherical wave) 而言,
) kr t ( i e r A ) t , r ( p = ω− (3.12) 對面積為δ 的微小振動板而言,距離振動板 r 的聲壓可由 Rayliegh’s first s integral 計算出來,積分形式如下
air d )e[i(ωt kr)] r π 2 s δ u ωρ i ( ) t , r ( p = − (3.13) 對一塊振動板而言,聲壓為:
∫
− = s ikr d t ω i air dS r e ) t , r ( u e π 2 ωρ i ) t , r ( p (3.14) 設 i(ωt kr) d(r,t) Ae A = − ,則u (r,t) iωAe iωA (r,t) d ) kr t ω ( i d = = − 所以 = −∫
− s ikr d t i air dS r e t r A e t r p ( , ) 2 ) , ( 2 ω π ρ ω (3.15) i kr t i i i d air r S e t r A t r p = −∑
× ( − ) Δ 2 ) , ( 2 ) , ( ω π ρ ω (3.16) i i i i d air r S kr t t r A t r p = −∑
( ( , )×cos( − ))Δ 2 ) , ( 2 ω π ρ ω (3.17) 現在假設聲源的力是簡諧激振的模式,並且其簡諧激振響應的解採用穩 態解。並考慮聲音接收處是位於垂直中心點r 處,接收時間考慮使用的頻率 區間,則:(
)
i i i i i i air r S kr y x A freq P = −∑
( ( , )×cos( − ))Δ 2 . 2 θ π ρ ω (3.18) 其中p(r,t)為量測點與振動板距離r 處的聲壓,ρair為空氣密度,ud(r,t)為振 動板表面元素之速度大小,A(xi,yi)為振動板表面元素之振幅大小,ω 為當 時之激振頻率,θi為板子當時之相位角,ri為量測點與振動板表面元素ΔS 之 距離(如圖 3-4),k 為波數(ω ,c) i= −1。其中 A(xi,yi)、θi、ri的結果可由 有限單元分析軟體ANSYS 進行簡諧激振響應分析得到。 在實務上,通常量測聲音使用的尺度是分貝(decibel)符號是(dB) ,它基 本上是一個對數尺度(log scale) ,採對數尺度主要原因是聲音的動態範圍非 常之大,同時人耳對音量的感覺也是比較接近對數尺度。聲壓位準(Sound Pressure Level) ) P P log( 20 SPL ref rms = (3.19) rms P 為量測點聲壓之均方根值為 2 / 1 2 / T 2 / T 2 rms p(r,t) dt T 1 P ⎥⎦ ⎤ ⎢⎣ ⎡ =
∫
− (3.20) 聲壓參考值P 2 10 5pa ref − × = 一般在測量聲壓的儀器看到的聲壓曲線即為頻率響應曲線,縱軸為(dB),橫 軸為激振頻率。 3-4 ANSYS 模型之驗證 3-4.1 模擬元素的選擇 由參考文獻[2]中的板結構驗證,其尺寸為延著纖維方向為 1.83 公尺、 垂直纖維方向為1.22 公尺、厚度為 0.0064 公尺,材料常數和密度(如表 3-3), 而其三明治板的邊界條件為簡支承(simple support)。以此相同的尺寸、材料 常數、支承條件,再以不同的ANSYS 元素作自然頻率的模態分析取其前六 個頻率與文獻中的結果做比較(如表 3-4)。由表中比較結果可得,理論基礎 為一階剪變形的元素Shell99 分析結果一致。 3-4.2 非線性懸臂梁模擬的驗證 因使用最佳化程式去設計彈性支承的過程有使用 ANSYS 作彈性支承 的靜力分析,為了避免在非線性情形下模擬錯誤,故先對ANSYS 做懸臂梁 靜力分析,並與文獻[7]中的問題做比較。分別選用 Beam3 以及 Shell93 對同樣的懸臂梁做比較,其中長度L 為 25.4m,EI=516.541Nm2,在不同施力 下之位移經 ANSYS 模擬的結果如表 3-4。表中左為[18]之數據,接下各行 分別為Beam3 未開大變形指令、Beam3 將大變形指令打開以及使用殼元素 Shell93 模擬之靜力模擬數值。由圖 3-5 可知使用 Beam3 且將大變形指令打 開以及Shell93,與文獻[7]之數值非常接近,而小變形之數據僅為線性變化。 可知ANSYS 模擬非常準確,故接下來對彈性支承的幾何形狀做最佳化分析 時將使用 Beam3 且將大變形指令開啟,而對揚聲器聲壓模擬之片狀彈性支 承使用Shell93。 3-4.3 聲壓模擬的驗證 經由前面兩節陳述可得知整個揚聲器的振動系統在模擬分析上,是由
揚聲板Shell99 的殼元素、音圈由殼元素 Shell99 以及質點元素 Mass21、懸
邊由 Spring-damper 14 的彈簧元素和質點元素 Mass21,彈波由殼元素 Shell93 所組成。先選定由傳統彈波製作以純巴桑木為振動板之揚聲器,組 裝後量測聲壓曲線。再與ANSYS 中建立之相同模型,計算出各節點位移與 相角,經由聲壓公式計算後所得之曲線,互相比較兩條曲線,如圖3-5。可 得知實驗和分析模擬出來的兩條聲壓曲線有相同的趨勢,由此可實驗驗證 出此 ANSYS 模型是具參考價值的,雖有些許的不同但趨勢大致上是相同 的,其主因為巴桑木為天然材料,材料常數並非一穩定值。
四、 最佳化總域極小化理論
「最佳化方法」是指找出問題其「最好的解決方案」的方法。此法已 被廣泛運用在解決數學、應用科學、工程、生物科技、商業和管理等領域 的最佳化問題上,例如在工程上,考量產品尺寸選用材料組合、成本、強 度等因素;在商業和管理上,有關排班表、投資組合、人員與物流管理等, 都是最佳化的問題。另外,尤其是有些領域上的問題是沒有解析解的,或 是問題同時有太多的考量因素與條件時,都可以將這些棘手的問題轉換變 成數學模式的最佳化問題,再藉由電腦的計算和模擬,而獲得解答。本章 將簡明地敘述這個方法及最佳化演算法的基本概念。 有關求解最佳化模型的數值方法,可以沒有限制條件和有限制條件來 區分。首先考慮「沒有限制條件」:(一)單變數函數最小值搜尋,這是多變 數目標函數最小值演算法的基礎,而其方法有解析解方法求函數一次微分 為零的解;若一次微分很難求得、不存在或不連續時,應用數值迭代方式 直接求解的零次方法,如二分法的「費邦那西搜尋」(Fibonacci Search)、「黃金分割搜尋」(Golden Section Search)和割線法(Secant Method);或使用二次
方法的多項式近似法之「牛頓法」等。(二)多變數函數最小值搜尋,其方法 有「零次方法」的隨機搜尋法、前面提到的「費邦那西搜尋」、「黃金分割 搜尋」;或使用一次、二次之直線搜尋(Line Search)法,如「準牛頓法」
(Qusi-Netwoon Method)、「牛頓法」(Netwoon Method)。接下來則是考慮「有
限制條件」:(一)單變數函數最小值搜尋,其方法有直接搜尋法(多項式近似
法、費邦那西搜尋法與黃金分割搜尋法);或懲罰函數(Penalty Function)法配 合循序無限制(Sequential Unconstrained)條件最小化技巧,將問題轉換為無
限制條件最佳化問題。(二)多變數函數最小值搜尋,其方法有「直接搜尋法」 的可行方向法、梯度投影法;應用「懲罰函數法配合循序無限制條件最小 化技巧」將原先的有限制條件的非線性問題,轉換成一系列的無限制條件 最佳化問題;線性規劃法(Linear Programing,LP);或是循序線性規劃法 (Sequential Linear Programing,SLP)與循序非線性規劃法(SNLP)等。
4-1 最佳化設計 在工程設計上,整個設計的流程其實很自然的包含了迴圈形式的迭代 過程。設計者經由不斷地深入了解問題,思考解決方法、而產生了各種新 的方案,再藉由不斷的試驗評估其可行性,最後在有限的時間和資源條件 限制下,找出一個最好的解決方案,而這其實就正是最佳化設計的流程。 最佳化設計乃是尋找一組變數 x ,而 n x∈ ⊂X R ,使得在受某些限制條件 下或在不受限制條件的系統模式(目標函數)F(x) 能夠達到最佳性能(目標函 數之最大值或最小值)。最佳化設計的程序,是先經由有系統的整理相關領 域知識後,再將實際問題建立成正確的最佳化數學模型,再以數值方法求 解最佳的解,數值方法概以沿著搜尋軌跡做反覆迭代來改變設計變數的值 以達到目標函數之最佳解。而最佳化設計其數學標準形式描述如下: Minimize F(x)=F(x1,x2,...xn) (4.1) s.t. hj
(
x1,x2,L,xn)
=0 ; j =1,2,L,p(
x x x)
k m gk 1, 2,L, n ≤0 ; =1,2,L, n i x x xil ≤ i ≤ iu ; =1,2,L, 其中 n、 p 和 m 分別為設計變數、等式限制條件及不等式限制條件之數目,il
x 和 則為設計變數之合理上、下限制容許值(Lower Bound and Upper
Bound)。 iu
x
而本文研究之片狀彈性支承幾何形狀設計,牽涉到相當多的變數,且 目標函數為非線性,都增加了總域極小值收斂的困難及不可靠度。因此, 文中將應用廣義拉格蘭吉乘子法(Augmented Lagrange Multiplier Method)將 原始受限制條件問題先轉變成無限制條件的問題,再配合隨機多起始點的 方法(Multi - Start Method)及貝氏分析法(Bayesian Approach)所發展的總域 極小值演算法[10]進行最佳化設計。此演算法是基於運動質點在保守力場中 能量守恆觀點,在無限制條件下的目標函數 F(x)(即位能值),應用多起始點 搜尋最小位能,若起始點落於R* = ∪Y1 Y2 ∪Y3 ∪ 內,皆可成功搜尋到目Y4 標函數之總域最小值 *(如圖 4-1 所示)。 X 4-2 多起始點方法 一般最佳化方法,是採用單起始點方式來搜尋極小值,而其所獲得之 極小值亦僅是區域局小值,並無法確認是否獲得總域之極小值。而本文之 方法正是要改善此一困境,利用隨機多起此點搜尋方式,可以增加搜尋獲 得上、下限範圍內之各個區域極小值的機會。且以能量守恆的觀念來計算 出目標函數值(亦即為質點位能),其迭代過程容許目標函數些微上升的解, 使目標函數可從區域極小值中跳脫,找到總域極小值,詳如4-3 節之區域極 小化程序所述。 在最佳化設計中取多起始點的方法,乃是針對設計變數x 的合理區間i (上、下限)內,利用隨機取樣的方式取出一系列的起始點,並且以此為開始
做搜尋軌跡方式,找出其區域極小值。而在文中取多起始點的方式,乃應 用 IMSL 軟體的 RNUN 副程式,對設計變數x 於上、下限區間範圍內,i 以隨機取樣的方式選取初始猜測值。如此我們可以找出一些區域極小值 以及對應的區域極小點 j j F x 。接著我們要從中找尋總域極小值 F*,其須滿足 下列的式子: * min{ } (4.2) j F F = 4-3 區域極小化程序 由多起始點之方式,隨機找出初始值 x ,而 n x∈ ⊂X R ,使用搜尋軌 跡方式是基於單位質量的質點在 n 維保守力場中的運動方程式及初始條 件而來,如下所示:
( )
( )
( )
( )
( )
0 0 0 0 x x x t x F t x = = Δ − = & && (4.3) 然後以能量守恆的觀念來計算出目標函數值,其中 為質點位能, 也是計算中的目標函數(如圖 4-1 所示), ( ( )) F x t x& 、 x&&分別表示質點在 n 維空間上 的速度與加速度。 將(4.3)式乘以 ( )x t& ,可以得到 1 ( ) 2 ( ( )) ( ) 2 T d x t F x t x t dt ⎛ ⎞ = −∇ ⎜ ⎟ ⎝ & ⎠ & (4.4) 再將(4.4)式對時間 t 做積分,範圍從 0 到 t,便可得到能量守恆關係式。如 下列式子所示: 1 ( ) 2 ( ( )) 1 (0) 2 ( (0)) ( )0 2 x t& +F x t = 2 x& +F x =F x (4.5)下列以三個條件來判別質點行進方向或停止搜尋: (1) 當條件式 T 0 成立時: F x −∇ &> 當質點的加速度與速度分量乘積合為正時,可視為加速度與速度是同 方向,表示質點將沿著搜尋軌跡下降最快的方向移動。此時位能減少,則 動能持續增加,而目標函數值將會降低,質點行進方向以迭代法來改變, 所以 x 值經過 k 次迭代後的改變值如下: xk+1 = xk + Δx& tk 1 x&k+1 = x&k − ∇F x( k+ )Δt (4.6) 其中;x0,x&0 及時間步階Δ 皆已給定。所以由上式亦可滿足近似之能量t 守恆關係: 2 2 2 1 1 1 1 1 1 ( ) ( ) ( ) ( ) 2 2 2 1 ( ) ( ) 2 k k k k k T k k 2 x F x x F x F x t x H x x + + + = + + ∇ + − Δ Δ & & % Δ (4.7) 其中;H(x~) 為黑森矩陣(Hessian Matrix)。 x%= xk+1 − Δx rk (0≤ ≤r 1) (4.8) (2) 若條件式 T 0 成立時: F x −∇ &< 表示質點的加速度與速度是反方向,此時表示質點位能增加,則動能 減少,所以質點軌跡移動的方向應往相反方向搜尋。 (3) 臨界點的判斷: 若以 當做在此搜尋軌跡中所找到的最低位能,且目標函數滿足下 列兩個條件之一時,就得終止搜尋軌跡,並將此軌跡當做區域最小值的變 數值。其目標函數滿足的兩個條件之一如下: t F
F x t( ( ))− Ft >α( ( )F x0 − Ft) 1 1 2 (1 )( ( ) ) 2 k T = x& + < −
α
F x0 −Ft (4.9) 其中α 為給定之參數值,而在本文中 α 值為 0.95,區域極小化流程如圖 4-2 所示。 4-4 總域極小化理論 藉由多起始點方法及區域極小值的計算,可得到一系列的區域極小 值。再利用貝氏分析方法(即為(4.10)不等式)做為判斷的標準,來決定總域 極小值,總域極小化流程如圖4-3 所示。其方法為先找出第一個區域極小值 F(x),然後再依照尋找區域極小值的方法找出區域最小值 。將 值 與 F(x)值做比較取較小值,再從比較之中找出一個臨時總域最小值 。 在尋找過程中,區域極小值 落在臨時的總域極小值 的收斂範圍內 則算成功一次。所以在 n 次的隨機取樣次數中,若有 r 次均落在 值 的收斂範圍內時,且機率大小必需滿足(4.10)不等式,則可將 視為總 域極小值 ˆ ( ) F x F xˆ ( ) *( ) F x ˆ ( ) F x F x*( ) *( ) F x *( ) F x ( ) F x 。[
( )
*( )
]
( )
(
(
) (
) (
)
)
* ! ! 1 2 ! 2 ! 1 1 , Pr q r n n r n n r n q x F x F ⎥ ≥ ⎦ ⎤ ⎢ ⎣ ⎡ − + − + − = ≥ = (4.10) 其中本文取 之值為0.99。當時 則視為收斂,則可得到總域極 小值 * q q n r( , )≥q* ( ) F x 及其對應之最佳設計變數值 x 。4-5 廣義拉格蘭吉乘子方法
廣義拉格蘭吉乘子法(Augmented Lagrange Multiplier Method)(簡稱 A. L. M.)[13]其主要的目的是要將原始問題中的等式及不等式的限制條件先加上 放鬆變數,再與等式限制條件,各別乘上一個拉格蘭吉乘子,加入原始的 目標函數中,如此原始具限制條件的目標函數 F(x),將變成無限制條件的 新目標函數ψ
(
x,μ,η,γp)
,A.L.M.區域極小化流程如圖 4-4 所示。本文研 究是以 A.L.M.、多起始點、總域極小化理論程序,將其運用在碳纖彈性支 承的幾何形狀設計。五、 片狀彈性支承之最佳設計
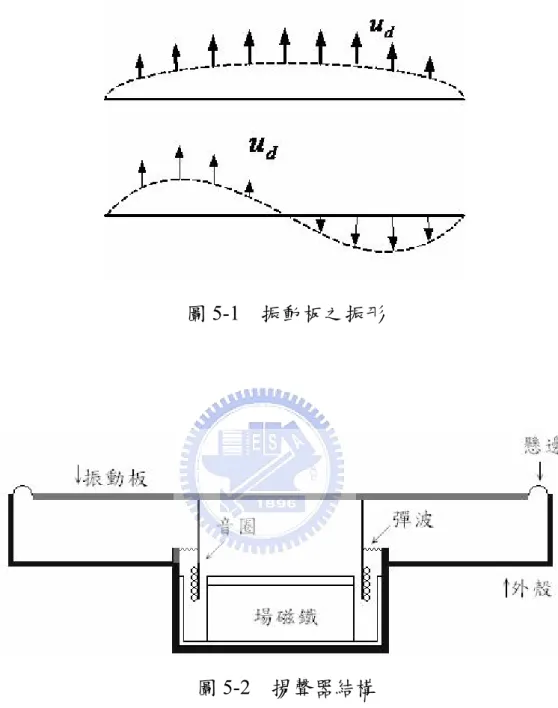
平面揚聲器振動板主要以振動板的剛體運動與振動板的變形兩種效應 產生聲音,也因為激振器推動振動板,使振動板表面元素推動空氣產生振 動,進而產生聲壓。由於振動板之振形有凹有凸(如圖 5.1),所以產生之空 氣速度亦有正有負,因此聲壓才有高低起伏的現象。一般在1000Hz 左右會 產生一個起伏較大的聲壓變化,稱之為中音谷,在一條平滑的聲壓中,中 音谷的出現將使聲音在此部份聲壓下降,導致揚聲器無法表現出所有頻率 的聲音而影響揚聲器的品質。 揚聲器單體的基本結構(如圖 5.2)可分為振動板、音圈、磁鐵、懸邊以 及彈波。由電磁學的電能轉為力學能的公式為 F=IBL (5.1) 其中F 為激振力(N),B 為磁場大小(Tesla),I 為電流大小(A),L 為線圈長(M) 振動板由音圈電磁力產生推力F,來激振揚聲器振動板。而懸邊與彈波主要 功能為維持揚聲器穩定振動,也是影響揚聲器彈性係數的主因。 在剛體運動方面,可由振動學的單一自由度公式: M K 2π 1 0 = f (5.2) 估算最低共振頻率 ,其中 K 為系統之彈性係數、M 為系統質量。聲壓-頻率曲線在 之後開始有較平穩的聲壓值表現,故稱 為一個揚聲器的實 效頻寬起始點。且 之後彈簧的影響降低,而剩振動板質量、剛性與力量 的物體運動關係,所以在一定的激振力下降低彈性支承的彈性係數、增加 振動板的剛性和減低質量將是改善揚聲器使其聲壓-阻抗曲線更加平緩的關 0 f 0 f f0 0 f鍵。本章內容先介紹彈性支承的功能、傳統彈波及以往彈性支承的缺點, 接著陳述片狀彈性支承幾何形狀的最佳化,並將最佳化製作出的彈性支承 與以往的比較其改善情形。 5-1 彈性支承之功能 在傳統錐盆揚聲器中,懸邊以及彈波是主要影響彈性係數的結構,除 了讓錐盆能夠藉音圈的控制而前後運動,並且使錐盆能在運動完畢後歸回 原位,簡而言之,支承的主要功能就是兼具彈性、定向和定位。ㄧ個好的 揚聲器彈性支承的彈性係數要越小越好,使得揚聲器的起始頻率fo 下降, 但是越低的 fo 將造成越大的振幅,且運動過程中的穩定度勢必大大的下 降,ㄧ個好的揚聲器支承的設計,就是在降低振動系統fo 為前提下,能保 持振動板定向穩定運動,且在往復過程中能將振動板和激振器之間定位, 使音圈不至於和磁鐵產生磨擦,而產生不穩定的運動,並且在低頻的大振 幅下,能給予振動板穩定的支承力,使得揚聲器在低頻時能有更真實的表 現。 彈波為定位音圈使其在磁隙中穩定運動的機構,而其作法通常是以纖 維布加上適量膠壓製,為了增強其彈性,設計成具波浪紋路,如圖1-3。但 當揚聲器需要有更大的衝程時,彈波的直徑勢必要增長,較不適合長形揚 聲器之製作,且在低音承受稍大一點振幅時,及呈現出明顯的非線性的彈 性變化(如圖 5-3),這對揚聲器低音的原音重現有非常大的不良影響。由於 揚聲器作動時為往復的週期運動,所以彈波本身要能夠有良好的抗疲勞 性,傳統彈波在長時間振動下其不織布以及熱塑膠會有龜裂現象影響其彈 性與定位效果,而且彈波黏著於音圈上,會將重量附加於其上,為了使聲
壓位準有較高之表現,所以必須選擇質量輕的材料。綜合以上,彈性支承 材料的選擇有兩大重點,一為抗疲勞性;二為質量輕。先前的設計為使用 塑膠薄片作為支承材料,但其不耐疲勞,若經常時間振動,塑膠片容易會 在轉折處發生破裂而導致失效。因此,最後的材料選為由碳纖與PE 薄膜所 組成之複材結構,其滿足了耐疲勞與質量輕之兩大重點。 5-2 碳纖片狀彈性支承 先製作幾何形狀簡單的ㄇ字型支承,製作方式如下: 1. 首先由冷凍庫中取出複合材料預浸材,並在室溫下靜置 12~14 小時。 2. 將預浸材依需要的疊層數目、角度和大小剪裁、堆疊。 3. 在鐵板上依序放置輔助材及複合材料(如圖 5-4),並抽真空,再將模 具送上熱壓機(如圖 5-5),依加溫時間-溫度關係及溫度-壓力關係(如 圖5-6)來控制複合積層板成型條件。 4. 等時間一到,關掉熱壓機的溫度,使模具在室溫下自然冷卻,待冷卻 到室溫時,再將碳纖支承取出,即製作完成,如圖5-7。 依上述方法即可製作出所需的彈性支承,而這種ㄇ字型彈性支承也能 提供良好的彈性。但經拉伸實驗發現,ㄇ字型支承有一缺點為,振動板往 外與往內之彈性係數並不一致,如圖5-8。振動板往外時,由於ㄇ字型支承 垂直段受拉力不易變形,只能藉由水平段提供變形,如此導致彈性係數較 大,而往內時,ㄇ字型支承垂直段受壓力會往側向彎曲,增加了柔軟度, 因此導致彈性係數較低。在彈性支承往外與往內彈性係數不同之情況下, 振動板運動並不對稱,如此會使聲音聽起來有跳動的感覺。 為解決此問題,於是在ㄇ字型支承水平段上增加了波浪設計,提高其
![表 3-5 文獻[7]與 ANSYS 模擬比較 Load P(N) 文獻[7] (M) Beam3 (M) nlgeom,off Beam3 (M) nlgeom,on Shell93 (M) 889.6 8.3467 9.4074 8.3477 8.3514 1779.2 13.2910 18.815 13.294 13.304 2668.8 15.9766 28.222 15.980 16.011 4448 18.5964 47.037 18.605 18.736 11120 21.3](https://thumb-ap.123doks.com/thumbv2/9libinfo/8603150.190191/68.892.120.819.167.466/表文獻模擬比較Load文獻MBeamMBeamMShellM2822215981611.webp)