國
立
交
通
大
學
運
輸
科
技
與
管
理
學
系
碩 士 論 文
考量區域涵蓋限制之運輸計劃選擇問題
A Transportation Programming Model Considering Regional
Coverage Constraint
研 究 生:郭逸銘
考量區域涵蓋限制之運輸計劃選擇問題
A Transportation Programming Model Considering Regional Coverage
Constraint
研 究 生:郭逸銘
Student:Yi-Ming Kuo
指導教授:黃寬丞
Advisor:Dr. Kuan-Cheng Huang
國 立 交 通 大 學
運輸科技與管理學系
碩 士 論 文
A Thesis
Submitted to Department of Transportation Technology and Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Transportation Technology and Management
August 2012
Hsinchu, Taiwan, Republic of China
考量區域涵蓋限制之運輸計劃選擇問題
學生:郭逸銘
指導教授:黃寬丞 博士
國立交通大學運輸科技與管理學系
摘 要
運輸規劃(Transportation Programming)對一個國家基礎建設的發展,扮演重要的角 色。基於有限的預算,在眾多可能的計劃之中,進行挑選並分配經費便成了一個極具 挑戰性的決策問題。實務上,計劃之間的相關性(Inter-dependency)使得運輸規劃問題 更形複雜。例如,某些計劃共同執行所產生的利益(或成本)會與個別執行該等計劃所 產生的利益(或成本)總合不同。此外,有些計劃本質上並不相容、是不能同時選擇。 例如,同一計劃不同程度的規模、或不同形式的版本,是不能同時選擇的;又例如, 使用同一資源(如同一塊土地)的多個計劃也不能同時選擇。尤其更重要的是,在現今 民主與多元的社會,預算分配的公平性以及區域發展的平衡性備受關注。因此,為考 量 社 會的 公 平性 與 政治 運 作上 的 可行 性 ,本 研 究提 出 一個 以 集合 涵 蓋問 題 (SetCovering Problem, SCP)為基礎的整數規劃(Integer Programming)模式,以確保在運輸規 劃過程中,每一個區域皆可不被忽略。本研究藉由拉式鬆弛法(Lagrangian Relaxation), 將此具有預算及計劃相容性限制的集合涵蓋(SCP)模型,轉化為一個線性規劃(Linear Programming)問題。本研究之主要任務為即在設計一個求解演算法,可有效地調整拉 氏乘數與找出可行解,藉以在可接受之運算時間內求出高品質的解。最後,本研究將 以能反映實務情況之數值測試,驗證所發展模型與求解演算法的適用性。 關鍵字:運輸規劃、集合涵蓋問題、拉式鬆弛法、啟發式解法
A Transportation Programming Model Considering Regional Coverage
Constraint
Student:Yi-Ming Kuo
Advisor:Dr. Kuan-Cheng Huang
Department of Transportation Technology and Management
National Chiao Tung University
ABSTRACT
Transportation Programming (TP) plays an important role in the development of the infrastructure of a country. Given the limited budget, it is a challenging decision to select the projects to be funded and implemented from the numerous options. The problem is complicated by the fact that some of the potential projects are inter-dependent. The benefit (and/or the cost) of the joint project combining multiple projects can be different from the sum of the benefits (and/or the costs) if the associated projects are implemented separately. Besides, some projects cannot be selected at the same time as they are incompatible or exclusive to each other by nature. The typical examples are the projects utilizing the same resource, such as a piece of land. In particular, much more attention nowadays is paid to the fairness of budget allocation and the balance of regional development as the society becomes more democratic and diversified. Thus, in order to address the issue of social justice and political feasibility, a new inter programming (IP) model based on the set covering problem (SCP) has been proposed to ensure that the regional balance issue is addressed. This SCP-based model, with the constraints taking into account of budget limitation and project compatibility, is transformed into a linear programming (LP) model by Lagrangian Relaxation (LR). The key theme of this study is then to design the solution algorithm that can efficiently adjust the LP multipliers and find the feasible solutions so as to achieve a high-quality solution within an acceptable computation time. Finally, the numerical experiment that can reflect the practical situations is performed to validate the applicability of the developed model and solution algorithm.
Key Words: Transportation Programming, Set Covering Problem, Lagrangian Relaxation,
誌 謝
過去的我總是對交通運輸有著一份小小的興趣,兩年前考上交大運管系碩士班後, 這個大家庭更帶領我一窺交通運輸領域之堂奧,讓我見識到其富饒趣味與博大精深之 處。這個大家庭中有著專業且令人敬佩的老師們,也有嚴謹而紮實的學術訓練,讓我 的碩士班生涯過得相當充實。 而充實之下必然有辛苦之處,論文的完成,首要感謝的是恩師 黃寬丞教授兩年 來悉心的指導,每當論文遇到疑惑及瓶頸時,老師總是不厭其煩、循循善誘,給予我 指點迷津與鼓勵。能成為老師的學生,讓我備感榮幸,在此致上謝忱。 論文的口試,感謝 吳水威教授與 邱裕鈞教授的不吝指教與提點,對論文提供 了更多不同面向的觀點與建議,使得論文更臻完備。由衷地感謝兩位老師。 而在小而美、溫暖的 KC-Lab 中,也有很棒的學長姐、同學,以及學弟妹。感謝 丞博學長的一些程式上教學與啟發;感謝婉葶學姊、家誼學姊與曉薇學姊,帶領著我 們幾個懵懂的學弟向前衝;感謝一哥儀安與大哥季佑的互相扶持打氣,和幫忙口試準 備,未來的工作就靠你們罩我了!還有逼逼逼的學妹彥蓉哥,Lab 沒有女生還真的是 不行啊!謝謝姚 Lab 學弟政龍的熱情客串,也為我們注入許多歡笑。 另外還要感謝其他同學們兩年的陪伴。特別感謝恕信,喜歡機車,騎車兜風的人 是少數,能遇到同好此道的人,特別讓我感到高興。謝謝水威 Lab 昇陽、俊昇和彥賓; 卓 Lab 威廷和楷霖,以及王 Lab 和任 Lab 的同學等,共同築起了 11 樓歡樂的笑聲。 也謝謝室友世穎、育誠和凱智大大的喇賽和電動時光。謝謝女友薏心,在這兩年中當 我的精神支柱,聽我抱怨發牢騷,容忍我的脾氣,還有對我的鼓勵。 最後,感謝我的父母與家人,有你們不辭辛勞的付出,當我最有力的後盾,讓我 深深體認到「家是永遠的避風港」這句話。謝謝你們!謹以此論文獻給我摯愛的父親 母親,期望自己未來可以成為能夠守護別人的人,也祝福運管系的各位能持續追尋自 己的夢想。 郭逸銘 謹誌于 國立交通大學運輸科技與管理學系 KC-Lab 民國一○一年八月二十一日目 錄
摘 要 ... i ABSTRACT ... ii 誌 謝 ... iii 目 錄 ... iv 表目錄 ... vi 圖目錄 ... vii 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的與範圍 ... 2 1.2.1 我國現行新興公共建設計劃先期作業資源分配方式 ... 2 1.2.2 區域資源分配不均之議題 ... 6 1.3 研究方法與流程 ... 7 第二章 文獻回顧 ... 9 2.1 成本效益分析法 ... 9 2.2 層級分析法 ... 10 2.3 單目標數學規劃法 ... 10 2.4 多目標數學規劃法 ... 11 2.5 計劃間之相關性 ... 13 第三章 模式構建及演算法 ... 16 3.1 集合涵蓋問題介紹 ... 16 3.2 運輸計劃選擇之集合涵蓋模型 ... 17 3.3 集合涵蓋模式與拉式鬆弛法 ... 18 3.4 拉式鬆弛模型及求解 ... 20 3.4.1 線性放鬆法 ... 21 3.5 產生可行解 ... 23 3.6 演算法流程 ... 24 第四章 數值測試 ... 26 4.1 實務問題之測試與分析 ... 26 4.2 設計例題 ... 34 4.3 設計例題測試結果 ... 37 第五章 結論與建議 ... 39 5.1 結論 ... 39 5.2 建議 ... 39 參考文獻 ... 41附錄 數值測試資料 ... 44 簡 歷 ... 49
表目錄
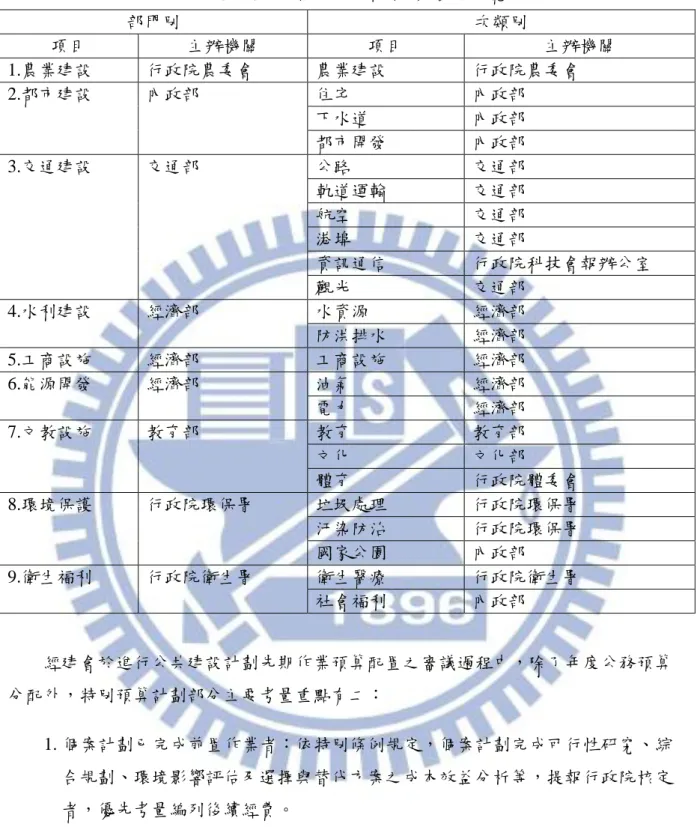
表 1 九大部門別、23 次類別主辦機關一覽表 ... 3 表 2 重點投資建設民國 98 至 101 年度中央特別運算一覽表 ... 5 表 3 各運輸計劃之資料(單位:億元) ... 27 表 4 各運輸計劃之涵蓋地區 ... 29 表 5 實務問題之相關性評估結果 ... 30 表 6 實例數值測試結果 ... 31 表 7 例題測試結果 ... 37圖目錄
圖 1 我國運輸計劃體系(交通部運輸研究所,民國 90 年)... 2 圖 2 新興計劃報核與先期作業之關係 (經建會,民國 96 年)... 4 圖 3 六大目標投資額比例(本研究整理) ... 5 圖 4 民國 95-100 年各地方政府平均年度實徵淨額百分比 ... 7 圖 5 研究流程圖 ... 8 圖 6 不同類型投資計劃之投資效果 ... 14 圖 7 線性放鬆問題及二元整數規劃其可行解空間之關係 ... 22 圖 8 不同模式其目標值的對應關係 ... 22 圖 9 可行解流程圖 ... 24 圖 10 UB 與 LB 之收斂情形 ... 24 圖 11 演算法流程圖 ... 25 圖 12 各運輸計劃之執行區域 ... 28 圖 13 預算值 6000 下 SCP 解(上圖)與 KP 解(下圖)之差異 ... 32 圖 14 預算值 2000 下 SCP 解(上圖)與 KP 解(下圖)之差異 ... 33 圖 15 SCP 與 KP 最佳解之差距折線圖 ... 34 圖 16 本研究假設之區域空間及計畫涵蓋情形 ... 35 圖 17 相關性之評估 ... 36 圖 18 演算法上下限值與最佳解之差距折線圖 ... 38 圖 19 平均最佳解與演算法求解時間折線圖 ... 38第一章 緒論
1.1 研究背景與動機
運輸系統及其構成之網路是為了經濟的需要。國父 孫中山先生曾於 1894 年《上 李鴻章萬言書》中提到「貨暢其流」之想法,足見交通運輸建設能支持人類的經濟活 動,並與其相輔相成。因此,扮演規畫者角色的政府部門,是促進交通運輸建設及經 濟發展最重要的推手。 運輸規劃(Transportation Programming)一般是指政府用以擬定未來各項交通建設 之主要依據及藍圖,分析對象依種類分為客運及貨運,依系統可分為國際、島嶼、城 際及都市運輸四體系,依運具則可分為公路、鐵路、客運、機場、海運及港埠。其內 容包含背景資料蒐集與整理,整體運輸需求模式建立工作,進行運輸需求預測與供需 評估,及運輸系統服務績效,改善計劃與政策敏感度分析評估等工作。 Niemeier et al. (1995) 則 指 出 運 輸 規 劃 是 運 輸 部 門 選 擇 運 輸 建 設 計 劃 (Transportation Project Selection)之過程,其中除了政府財務限制外,亦必須對經濟發 展、土地使用、系統之兼容性 (Compatibility)及環境影響有清楚的考量。 我國運輸相關的計劃大致可區分為整體性計劃(又稱整合性計劃)與專案性計劃 (又稱部門性計劃)兩大類,整體性計劃又可分為附屬於都市或區域計劃之附屬型計 劃、與交通運輸部門或地方政府單獨研提之獨立型計劃。其中以獨立型整體性計劃屬 運輸部門主管,且具有整合性;依其規劃程序與內容,其層級可概分為「國家/區域」、 「都會區/縣市」兩級。「國家/區域」級整體運輸規劃可視為「都會區/縣市」級整體 運輸規劃,在控制總量及規劃方向上的主要依據。圖 1 即為我國運輸計劃體系之架構 示意圖,而本研究將著重於國家/區域整體運輸規劃,對於中大型/中長期運輸規劃建 設進行探討。 不論是整體性計劃或是專案性計劃,均必須有良好的運輸規劃體制與作業,才能 確保運輸規劃程序可以符合綜合性(Comprehensive)、連續性(Continuity)、協調性 (Coordination)、溝通性(Communication) 及一致性(Consistency) 等 5C 之精神。圖 1 我國運輸計劃體系(交通部運輸研究所,民國 90 年)
1.2 研究目的與範圍
對於運輸計劃規劃,各個國家皆有不同的制度,本研究先介紹我國現行之運輸計 劃規劃方法,並點出區域資源分配不均的問題,藉以界定研究之目的與範圍。 1.2.1 我國現行新興公共建設計劃先期作業資源分配方式 交通建設計劃具有投資金額高、涵蓋範圍廣大及公眾參與(Public Involvement)程 度高之特性,故為公共建設計劃的一種。我國中央政府在新興公共建設計劃先期作業 中,便面臨資源與預算分配之議題。本研究參考行政院經濟建設委員會(以下稱經建會) 「政府重大公共建設計劃年度預算配置機制之研究」(經建會,民國 98 年),整理出我 國公共建設計劃先期作業流程如下: 1. 中央各計劃執行單位初評提出需求。 2. 主辦機關(如交通部)加具具體審核意見,納入編製建設計劃,並予綜合整理後, 函送經建會審議,並副知主計處、工程會、研考會及財政部等會審機關。 3. 經建會核議後再彙整提報行政院年度計劃及預算審核會議通盤核議。 運輸計劃體系 整體性運輸計劃 專案性運輸計劃 附屬型整體性 運輸計劃 獨立型整體性 運輸計劃 國家/區域整體運輸規畫 都會區/縣市整體運輸規畫 台灣地區整體 運輸規畫 四大地區整體 運輸規畫 五大都會區整體 運輸規畫 縣市整體 運輸規畫 生活圈 運輸規畫 縣市綜合 運輸規畫表 1 九大部門別、23 次類別主辦機關一覽表 部門別 次類別 項目 主辦機關 項目 主辦機關 1.農業建設 行政院農委會 農業建設 行政院農委會 2.都市建設 內政部 住宅 內政部 下水道 內政部 都市開發 內政部 3.交通建設 交通部 公路 交通部 軌道運輸 交通部 航空 交通部 港埠 交通部 資訊通信 行政院科技會報辦公室 觀光 交通部 4.水利建設 經濟部 水資源 經濟部 防洪排水 經濟部 5.工商設施 經濟部 工商設施 經濟部 6.能源開發 經濟部 油氣 經濟部 電力 經濟部 7.文教設施 教育部 教育 教育部 文化 文化部 體育 行政院體委會 8.環境保護 行政院環保署 垃圾處理 行政院環保署 汙染防治 行政院環保署 國家公園 內政部 9.衛生福利 行政院衛生署 衛生醫療 行政院衛生署 社會福利 內政部 經建會於進行公共建設計劃先期作業預算配置之審議過程中,除了年度公務預算 分配外,特別預算計劃部分主要考量重點有二: 1. 個案計劃已完成前置作業者:依特別條例規定,個案計劃完成可行性研究、綜 合規劃、環境影響評估及選擇與替代方案之成本效益分析等,提報行政院核定 者,優先考量編列後續經費。 2. 計劃工作項目符合下列原則者,優先編列經費: (1) 計劃已進入細部設計或施工階段者。 (2) 對維持產業競爭力及增加就業機會效益顯著者。 (3) 凡計劃之推動,有助於誘發民間投資、促進產業發展、可協助其他經濟建 設達成效益者。
(4) 計劃具時間迫切性、極具效益性,或可打通瓶頸路段,發揮「最後一哩」 功效者。 (5) 能改善生產環境、提升文化生活環境品質或具促進社會公平功能者。 經建會負責推動公共建設計劃先期作業,以分配年度預算為重點,年度次類別建 設計劃就「發展政策及策略」、「衡量指標及建設數量」、「資源分配」等方面加以 審議,有關新興計劃報核與先期作業整體之流程圖如圖 2。 圖 2 新興計劃報核與先期作業之關係 (經建會,民國 96 年) 本節以我國政府提出計劃期程為民國 98 年至民國 101 年之「振興經濟擴大公共建 設投資計劃」為例,介紹其計劃挑選原則及大構面內容。 經建會於民國 98 年 2 月 4 日會議後,確定本次擴大公共建設投資篩選原則如下: (經建會,民國 98 年) 1. 具有必要性、急迫性及乘數效果(經濟效果、所得效果及就業效果)者。 2. 具提振景氣及產業振興效果,惟因預算不足需加速辦理者。 3. 屬愛台 12 建設之指標性建設計劃,且地方民眾殷切期盼者。 4. 具均衡區域發展精神及效果者。 5. 計劃成熟度較高,已完成規劃設計且無地方經費分擔或環評等爭議,以加速政 府投資,掌握推動效益者。 6. 另有其他財源支應或與其他計劃重複者,執行率不彰者之計劃不予納入。 新興公共建設計劃推動階段 計劃構想(各次 類主管機關) 可行性研究 民間參與可行性研究 民間投資 綜合規劃報告 細部設計 發包施工 年度個別計 劃經費需求 次類別建設計劃 個別計劃初審 經建會與會 審機關審議 行政院核定後 送立法院審議 預算執行 公共建設計劃先期作業程序
育優質研發人力,協助安定就學及就業」之六大目標,其分配之經費如下表。由圖 3 可知,「完善便捷交通網」及「改善離島交通設施」預算佔特別預算總額達 28.4%, 足見政府對於交通建設計劃投入程度相當地高。 表 2 重點投資建設民國 98 至 101 年度中央特別運算一覽表 重點投資建設 投資額(億元) 比例 完善便捷交通網 1385.363 27.71% 建構安全及防災環境 993.035 19.86% 提升文化及生活品質 1268.097 25.36% 強化國家競爭力之基礎 建設 946.245 18.92% 改善離島交通設施 34.683 0.69% 培育優質研發人力, 協助安定就學及就業 372.577 7.45% 合計 5000 100% 圖 3 六大目標投資額比例(本研究整理) 本研究計劃之一個研究重點在探討政府評估眾多中大型交通建設計劃時,如何進 行計劃選擇與預算分配。依照圖 2 所示,新興計劃報核與先期作業之關係中,新興公 共建設計劃推動階段之「民間參與可行性研究」與「民間投資」部分,依照經建會「主 辦機關(如交通部)編擬重點及編報原則」,新興計劃在納入預算前,原則上皆須先報 奉行政院核定後,再核列經費。且在納入預算前,應先擬訂民間參與之程序,未經過 完善便捷交 通網, 27.71% 建構安全及 防災環境, 19.86% 提升文化及 生活品質, 25.36% 強化國家競 爭力之基礎 建設, 18.92% 改善離島交 通設施, 0.69% 培育優質研 發人力,協 助安定就學 及就業, 7.45%
此一程序者,除非有特殊考量,原則上不予以編列預算。上述民間參與及民間投資部 分 , 其 經 費 預 算 較 具 彈 性 , 如 可 用 民 間 興 建 後 轉 移 模 式 , 也 就 是 BOT (Build-Operate-Transfer)方式來吸引民間投資等,故此部分將不列入研究範圍內。 1.2.2 區域資源分配不均之議題 隨著國家進步與開發的程度,目前我國進行中的重要建設,其規模越來越大,相 對投入的人力、財力及物力亦大幅增加。近年來政府財政困窘,在資源有限情況下, 如何適當地分配各類公共建設,發揮公共建設計劃之效益,並達成經濟成長目標,為 一重要課題。 早期在運輸計劃規劃過程中,並無適當的建模工具,僅依靠經驗法則或決策者的 個人經驗,近年則有各種數學規劃模式之應用,以至多目標規劃(Multiple Objective Programming, MOP)之相關研究,可最佳化資源分配,用以極大化利益、極小化成本、 或者滿足各項目標。 然而過度集中於成本與利益的議題,卻容易忽略了公共建設計劃的「區域公平性」 特性。若以稅收之角度而言,人口愈多之地區其地方政府之稅收愈高,意即政府傾向 將資源投入於稅收較高之地,以促進其經濟發展。部分偏遠或遠離都會區之新興運輸 計劃因評估利益小於其他計劃,而納編預算及執行計劃之優先順序落後,導致運輸計 劃分配區域不均,因都市經濟發展造成偏鄉人口外流、城鄉失衡,且時有民眾抗議交 通不便的新聞發生。本研究整理民國 95 年至民國 100 年各地方政府平均年度實徵淨額, 可知單一行政區人口數及人口密度最高之臺北市政府實徵淨額最高,佔全國總額之 39%。
圖 4 民國 95-100 年各地方政府平均年度實徵淨額百分比 資料來源:財政部(民國 101 年),本研究整理 而過去亦有區域分配公平性之相關文獻。李玫霙(民國 83 年)就臺灣地區重大交通 建設對其區域分配公平性進行分析,在區域分配權重方面透過 Probit 模式來校估政府 各項重大建設計劃投入後之分配權重,北:南:西:東之分析結果比值為 1:0.4755: 0.2624:0.0813,顯示過去政府確有重北輕南、偏西輕東之現象存在。 發展都會區交通建設之利益可能比偏遠地區為高,但若政府欲在嚴謹且客觀的分 析下,將公平性納入考量,則偏遠地區之運輸計劃仍須適當地列入優先計劃組合中, 並兼顧公眾利益之最大化、及區域平衡發展與城鄉差距縮小等不同目標。 本研究之主要研究目的為計劃建立一數學規劃模式,以區域涵蓋限制來兼顧各區 域在計劃評選過程之平衡性。由於涵蓋限制式的特性,本研究使用集合涵蓋問題(Set Covering Problem, SCP)之模式做為數學規劃模式的發展基礎。雖然集合涵蓋問題的特 色為問題描述容易、極具彈性,但其畢竟為具有高度求解複雜性之組合最佳化問題, 求解上仍是一個困難的工作。此外,運輸規劃問題因為具備預算限制,過去研究亦有 採用背包問題(Knapsack Problem, KP)來求解,而本研究計劃,亦將其納入考量。然而, 背包問題亦是一複雜的組合性最佳化問題。因此當本研究計劃之問題的規模較為龐大 時,為了確保在可接受的時間內,求得精確度高的近似解(Approximate Solution),發 展具效率性的啟發式解法(Heuristic Method),便是本研究一個重要的工作項目。
1.3 研究方法與流程
新北市(改制後) 10% 臺北市 39% 臺中市(改制後) 7% 臺南市(改制後) 4% 高雄市(改制後) 11% 宜蘭縣 1% 桃園縣 10% 新竹 縣 2% 苗栗縣 2% 彰化縣 2% 南投縣 1% 雲林縣 4% 嘉義縣 0% 屏東縣 1% 臺東縣 0% 花蓮縣 1% 基隆市 4% 新竹市 3% 嘉義市 0% 實徵淨額百分比在研究方法的流程上,將先了解其相關議題之細節與決策考量,並了解問題之核 心與過去研究運輸計劃規劃之相關方法或數學模式。之後,將依據相關數學模型,或 發展數學規劃式來獲得有效求解的方法。最後,將以適當的範例驗證其數學規劃模式 與求解方法的適當性。 本研究之主要研究項目如下所列。 1.確立研究目標與工作要項 2.運輸規畫問題之文獻回顧 3.運輸規畫問題近期之模式與求解方法分析與理論探討 4.本研究運輸規畫問題之數學模型建立與演算法發展 5.程式撰寫、數值測試及演算法調整 本研究擬定之流程圖如圖 5 所示。 圖 5 研究流程圖
第二章 文獻回顧
有關本研究之相關文獻回顧,首先於 2.1 節將介紹單一運輸計劃之成本效益評估 方式,也就是傳統的成本效益分析法加以說明。然而,在進行多個運輸計劃的選擇時, 時常用不同的準則(如旅行時間、油耗成本、壅塞程度、經濟利益等)來評估各計劃 的優劣,此即為多準則決策(Multi-criteria Decision Making, MCDM)方法。就多準則決 策方法,本研究將介紹其中之幾個代表性的方法。2.2 節說明層級分析法與數學規劃法, 2.3 節 與 2.4 節 分 別 說 明 數 學 規 劃 法 中 單 一 目 標 (Single-objective) 與 多 目 標 (Multi-objective) 的 數 學 規 劃 法 。 最 後 2.5 節 在 則 是 關 於 運 輸 計 劃 中 之 相 關 性 (Inter-dependence)概念之引入,以利後續研究模式的建立。 2.1 成本效益分析法 在單一運輸計劃的評估中,用以評估該計劃是否值得執行,傳統上最常用的方法 為成本效益分析法(Button and Pearman, 1983),也就是 Cost-Benefit Analysis (CBA)。成 本效益分析技術的發展可追溯到 1808 年美國財政部比較水資源相關計劃的成本效益, 直至 1970 年代後,CBA 的蓬勃發展使該工具程為市場經濟或混合經濟體制國家政策 評估之重要工具。
成本效益分析的目標為追求「社會淨利益最大化」或「社會成本最小化」。CBA 法主要應用淨現值法、益本比法 (Benefit-Cost Ratio)及投資報酬率法 (Rate of Return) 等方法進行評估,上述方法主要衡量運輸投資計劃之效率,即求取其貨幣價值,以衡 量是否值得投資。
儘管 CBA 法能將有形或無形的財產以貨幣價值之方式呈現,但現實中仍難以將 所有的影響因子可靠地表達出來。CBA 法也因高度複雜的量化方法而產生偏誤或低估 之情形(Button and Pearman, 1983)。
楊晴惠(民國 86 年)提出在傳統的經濟效益評估過程中考量區域分配公平性的方法, 透過將分配權重納入傳統成本效益分析方法中,可評估一個計劃在具備經濟效率之外, 是否能同時達成分配之公平。另一方面,亦可評估一個不具經濟效率之計劃,以公平 的觀點而言,是否能有效的促進分配公平,而不至於有過高的效率損失,並對「中橫 快速公路」進行實證分析。
在完成成本效益分析,進行多個運輸計劃之選擇時,一般來說皆以利益最高的計 劃優先排序,直到預算被分配完畢為止。但此法在預算限制之下,總利益並不一定最 大化,缺少了數學規劃之觀念,因此近來亦有提出以數學規劃為基礎的評選方法。
2.2 層級分析法
層級分析法(Analytic Hierarchy Process, AHP)為 Satty 於 1971 年所發展出來之 MCDM 方法(Satty, 1994),不斷修正後,1980 年後廣泛應用於政治分析、運輸規劃、 投資組合的應用、設施區位的規劃、能源政策的規劃都市運輸系統的評估、行銷研究, 近年則朝向與多目標規劃結合等。應用 AHP 法進行投資計劃或方案評選時,其評估過 程可歸納為四個步驟:
1. 構建層級結構。
2. 進行成對比較,建立成對比較矩陣(Pair-wise Comparison Matrix)。
3. 應用特徵向量法求解成對比較矩陣之特徵值,以即求取各決策要素之相對權 重。
4. 根據層級結構之內容,整合各層級決策要素之相對權重,以求取可行計劃或方 案之優勢程度,並據以進行排序。
近期關於 AHP 應用於運輸規劃問題的相關文獻,有 Ferrari (2003)應用 AHP 法於 運輸計劃方案選擇之研究;以及 Kulak and Kahraman (2005)結合模糊理論(Fuzzy Theory)與公理設計(Axiomatic Design)於多屬性(Multi-Attribute)運輸公司選擇之研究 等。 AHP 法所產生之結果為方案間之優勢排序,對於方案的預算限制較無著墨,其方 法中之評估尺度亦容易囿於運輸部門決策者的主觀想法,且通常不適用於較大規模計 劃數目之評估。
2.3 單目標數學規劃法
背包問題(Knapsack Problem, KP)除了廣泛運用於貨物裝卸、原料切割等問題外, 在運輸計劃選擇問題中,亦是目前廣為人知的經典數學規劃法。其目的在許多候選的 計劃中,選出具有最大效用或利益的組合。基本上,單目標或單準則(single-criterion)
n j j jx p Maximize 1 (1) s.t.
n j k j jkx B c 1 (2) } ..., , 1 { } 1 , 0 { j N n xj (3) 其中,xj為 0-1 二元決策變數,當 xj=1 則為選擇計劃 j,xj=0 時為不選擇。相關的 參數符號,n 為計劃數目,cjk為計劃於第 k 年之執行成本,Bk為政府第 k 年度預算(yearly budget),也就是模式中的背包容量(capacity)。另外,pj可視為計劃的量化數字,如利 益(benefit)、權重(weight)或效用(utility)等。 雖然背包問題的形式簡單,但在計算複雜度(complexity)上則為 NP-complete,若 以窮舉法(Exhaustive Enumeration)求解,對一個 n 項目的背包問題,其求解運算次數 為 O(2n )次,當變數越多,求解時間愈發耗時,故於學術或實務上求解大規模(large scale) 背包問題大多利用啟發式解法。 過去文獻中關於背包問題之求解法,較早是以貪婪演算法(Greedy Algorithms)、有 效率的分支界限法(Effective Branch-and-bound)、動態規劃法(Dynamic Programming, DP)、切面法(Cutting Plane)等方法,但對於較大規模的問題之求解效率仍然不彰。故 近來許多學者發展巨集啟發式解法(Meta-heuristics),所謂巨集啟發式解法是以傳統啟 發式解法為核心,結合高階的搜尋策略,以跳脫局部最佳解的窘況為目的,進而找到 更好的解。較為著名的解法有模擬退火法(Simulated Annealing, SA)、禁忌搜尋法(Tabu Search, TS)、基因演算法(Genetic Algorithm, GA)、類神經網路法(Neural Network, NN), 為較著名之演算法,其他還包括門檻接受法(Threshold Accepting)、噪音擾動法(Noising Method)、大洪水法(Great Deluge Algorithm)、紀錄更新法(Record-to-Record Travel)、 搜尋空間平滑法(Search Space Smoothing)、兩極跳躍法(Flip-Flop Method)等。一般而言,啟發式演算法在大部分的情況下,可有效率的求得品質合理的解,然 而並不一定能求得最佳解,也不見得能保證所求之解與最佳解的差距(李其灃,民國 89 年)。
2.4 多目標數學規劃法
鑒於漸趨複雜的社會系統發展,運輸投資規劃有更多的利益相關者(stakeholders) 參與,決策過程中考量數個不一致的目標而產生衝突,因此,利用單一目標式之決策方法已不適用,遂發展出多目標規劃方法。
多目標規劃是一種明確並可考量多個決策目標的數學規劃法,目的為協助決策者 於有限資源及目標衝突的限制下,求取一個較佳的方案組合。多目標規劃理論之研究, 根源於 Von Neumann and Morgenstern 在 1944 年提出「數個衝突的最大化問題之困境」 的概念(von Neumann and John, 2007)。然而至 1972 年以前,多目標規劃尚未真正受到 重視,1972 年在美國南卡羅來納州大學召開國際性多評準決策研討會後,逐漸獲得學 術界重視繼而發展。時至今日,已為許多公共政策與企業決策所使用。
多目標數學規劃亦為多評準決策方法的分支之一(Massam, 1988),對於在運輸規劃 問題的研究上,著重於將運輸投資計劃建構為數學規劃模式,其解法有權重法 (Weighting Method) (Friesz et. al., 1980) 、 目 標 規 劃 法 (Goal Programming) (Khorranshahgol and Steiner, 1988)、與調和規劃法(Compromise Programming, CP) (Won, 1990)等。
多目標規劃模式為單一目標線性規劃之延伸,不同之處於多目標規劃可同時處理 二個以上之目標,而單目標線性規劃僅能處理一個,即所求取之最佳解為一個點(Max
Z 值),而多目標所求之解為最佳向量,或稱向量最佳化(Vector Optimization),即 Max Z=[Z1, Z2,…, Zp],為一組點集合。
Teng and Tseng (1996)提到,當多目標規劃問題引入資源限制式,且運輸計劃之決 策變數為二元變數(Binary Variable)時,計劃方案間只有 0 (不選) 與 1 (被選) 兩種模式, 此 時 之 多 目 標 規 劃 問 題 被 稱 為 0-1 多 目 標 多 維 度 背 包 問 題 (0-1 Multi-objective Multidimensional Knapsack Problems)。多目標多維度背包問題是從單一目標背包問題 推廣而來。其數學模式如下: Gx x Z x Z x Z Maximize ( )( 1( ),..., m( )) (4) s.t. AxB (5) n j xj{0,1}, 1,2,..., (6) Z(x)為 m 維{Zi(x)}之目標向量,G 為 m×n 矩陣,Gij指投資方案 xj達到目標值 Zi(i = 1, 2, …, m; j = 1, 2, …, n),x 為 n 項方案之決策向量{xj}。若被選,則 xj =1,否則為 0。 A 為 q×n 矩陣{Akj}(k= 1, 2, …, q),指的是 q 項資源對應 n 項方案,Bk為第 k 項資源之
難,Teng and Tseng (1996)故提出空間效率解法(Spatial Efficiency Algorithm),以求取 近似解。 一個多目標最佳化問題的解包含了所有的決定向量,由這些決定向量可構成每一 個目標向量,在不減少問題維度的情況下,若無其他解能改善此解,則可稱為 Pareto Solution。多目標的最佳化問題通常具有兩個求解方面的困難,其一為最佳化的目標函 數數目(維度)很大時,搜尋空間會過於廣大且複雜化﹔其二為設計一個有效的演算法 搜尋到 Pareto 最佳解集合。
近年,Zhong and Young (2010)評估各計劃間之衝擊值(impact),結合 AHP 找出各 計劃下方案之權重分數,將多目標背包問題簡化為一單目標多重選擇(Multiple Choice) 背包問題,模式如下:
m i j N ij ij i x s Maximize 1 (7) s.t.
m i j N ij ij i c x w 1 (8) m i x i N j ij 1, 1,2,...,
(9) i j i m j N x {0,1}, 1,2,..., (10) c : 總預算 wij : 計劃 i 中方案 j 之成本 sij : 計劃 i 中方案 j 之權重分數 xij : 計劃 i 中方案 j 之二元決策變數 Ni : 計劃 i 中的方案集合 其中,每個計劃 i 都有不同的方案 j(不同的執行規模或版本),以二元變數 xij代表 對應的選擇。目標式中,權重分數愈高代表愈大之產出,因此式(7)為求最大總和分數 值。式(8)為總預算限制,式(9)代表,同一計劃的不同方案,僅能選取一個來執行。因 問題之規模較小,Zhong and Young (2010)以 LINGO 套裝軟體求解整數規劃(Integer Programming, IP)問題。此篇文獻已將部分計劃相關性納入考量,但就計劃相關的各個 層面,並未完整加以討論,也未考慮運輸規劃中之區域涵蓋問題。運輸投資計劃之研究中,無論使用何種規劃與評估方法,過去文獻大多自然地假 設 各 計 劃 之 間 皆 為 獨 立 (independent) , 實 際 上 常 具 有 某 種 程 度 之 相 關 性 (inter-dependency),因此,如何進行運輸投資計劃之分類,以及決定相關程度之大小, 為一重要之問題。鄧振源(民國 81 年)以及 Teng and Tseng (1996)提出並定義運輸計劃 相關性之四種類型,其關係可由圖 6 所示。 1.獨立類計劃 指該投資計劃在 m 個目標之達成績效,不受到其他投資計劃之影響,同時亦不 影響其他投資計劃。 2.互補類計劃 指該投資計劃在某一目標之達成績效,受到其他一個或一個以上投資計劃之影 響或影響一個或一個以上之其他投資計劃,當二個相互影響之投資計劃同時進 行投資時,則能增加該目標之達成績效。 3.替代類計劃 指該投資計劃在某一個目標之達成績效,其部分或全部可由其他投資計劃來達 成;亦即令一投資計劃可以取代該投資計劃來達成某一個目標之部分或全部績 效。 4.同時互補替代類計劃 指該投資計劃在同一目標或不同目標下,分別與另一個或其他二個投資計劃具 互補性與替代性。
在運輸投資計劃相關性分類時,此篇文獻為由數位相關領與之專家組成決策群體, 依其專業與學識進行主觀之判斷。然而當投資計劃甚多時,將牽涉更多計劃相互間之 同時互補或同時替代效果時,欲將這些投資計劃一併判斷極為困難,且判斷誤差將大 增。
歷年來,將計劃相關性納入運輸規畫問題的研究非常有限。除了鄧振源(民國 81 年)以及 Teng and Tseng (1996)之外,李其灃(民國 89 年)也以鄧振源(民國 81 年)之文獻 為基礎建立了單目標運輸計劃選擇問題。Gomes (1990)則發展了一排序(ranking)方法, 將具有相關性的多個計劃在多目標的架構下加以排序。此外,Iniestra and Gutiérrez (2009)亦認為建模過程中應考慮計劃之相關性,即計劃的投資組合(portfolio)之績效應 為個別計劃績效總合的加成或減成。 本研究於進行計劃相關性判定時,採取了更全面性的分析。除了具互補性之計劃 一同執行時,將額外之綜效(synergy)納入考量外;就成本面,若同時執行兩計劃,對 成本會發生影響時,也將其效應納入考量。基本上,這些有相關性的計劃在考慮其同 時執行時之決策,係另設一二元決策變數來代表之。因而該等計劃將有互斥性,在進 行決策時不可同時選擇。此外,考量替代類計劃(例如計劃預定徵收土地範圍相似)之 情況,也有不可同時選擇之情況。該等計劃選擇相容性的考量,都將以設立相關限制 式,來避免此類計劃重疊執行。
第三章 模式構建及演算法
有關本研究相關之文獻回顧,基於本研究將以涵蓋限制來處理區域的平衡性,集 合涵蓋問題(Set Covering Problem, SCP)是模式發展的基礎,也首先在 3.1 節加以說明。 之後,將在 3.2 節說明本研究計劃所發展的整數規劃模式,探討如何將本研究所關心 的議題納入模式之中。之後,為了啟發式解法發展所需,將在 3.3 節先介紹拉式鬆弛 (Lagrangian Relaxation)法,並於 3.4 節說明如何將 3.2 節的整數規劃模式進行拉式鬆弛, 並呈現所得到的拉氏鬆弛模式。3.5 節說明如何由拉式鬆弛解產生可行解之過程,並綜 合以上將本研究之演算法流程圖呈現於 3.6 節。
3.1 集合涵蓋問題介紹
集合涵蓋問題的目的為用最小化目標之方式達成涵蓋所有項目的限制,過去有相 當多研究將各類問題轉換為集合涵蓋問題,相似的方法已被許多學者應用於許多排班 (Scheduling)問題,以及車輛路線問題(Vehicle Routing Problem, VRP)。如 Hoffman and Padberg (1993) 以集合涵蓋模式應用於車隊排程問題(Crew Scheduling Problem), Ribeiro and Soumisu (1994)求解多場站車輛排程問題,Irnich (2000)也以 SCP 求解多點 位撿貨運送問題等。 SCP 之定義如下,令 A = [aij]為一個 0-1 的 m× n 矩陣,令 c = [cj]為一個 n 維向量。 對 A 的列(row)而言,令集合 M ={1, ... , m};對 A 的行(column)而言,令集合 N = {1, ..., n}。定義若一個列 jN 涵蓋了一個行 iM,則 aij = 1,否則為 0。 另外,若 cj (jN)的值代表 column j 的成本,同時並假設 cj>0。集合涵蓋問題是 將全部項目 iM,利用不同的集合將其涵蓋,其中每個項目必須被涵蓋至少一次,也 就是每個 row iM 都被至少一個 column jN 涵蓋到。其中每一個集合由不同項目所 構成,並有其相對應的成本,集合涵蓋問題之目標求取在符合涵蓋所有項目的限制下, 所選取集合之總成本為最小。其數學模式如下:
J j j jx c Minimize (3.1)(11)J j xj{0,1}, (13) 式(11)為目標式極小化總成本,式(12)為涵蓋次數限制為至少一次,決策變數則為 二元變數。集合涵蓋問題之求解,根據文獻(Caprara et al., 1999)利用拉氏鬆弛法可得 到非常好的求解品質。因此本研究先以集合涵蓋模型來描述所關心的運輸規畫問題, 之後並以拉氏鬆弛法來設計相關的啟發式解法。
3.2 運輸計劃選擇之集合涵蓋模型
本研究將運輸計劃選擇問題描述為一個具資源限制之單目標最大化利潤問題,將 區域涵蓋限制加入後,建構為集合涵蓋模型,其數學規劃模式如下。
J j j jx b Minimize (14) s.t. a x i I J j j ij
, 1 (15)
J j j jx G c (16)
J j j rjx r R f 1, (17) J j binary xj: (18) 符號說明: i:地區編號 (I:所有地區之集合) j:計劃編號 (J:所有計劃之集合) r:互斥關係之編號 R:計劃間有互斥關係所形成之集合 bj:計劃 j 之利益 cj:計劃 j 之成本 G:總預算 aij:0-1 常數,當地區 i 為計劃 j 所涵蓋時,aij = 1,否則為 0。 frj:0-1 常數,就互斥關係 r 而言,計劃 j 包含於 r 中,frj = 1,否則為 0。 xj:0-1 變數,當計劃組合 j 被選取時,xj = 1,否則為 0。 目標式為最大化利潤,因集合涵蓋模為極小化之問題,故將利潤乘上一個負號, 將利益極大化轉化為極小化問題。式(15)為區域涵蓋限制,其確保每個地區最少必須涵蓋一次。實務上,一個運輸計劃對某一地區的 aij值可能不全然為 0 或 1。若一個運 輸計劃之執行地或影響範圍未達該地區之中心地(亦即人口密集處之商業區或行政中 心);或計劃執行地未達鄰近區域,卻因路網或其它因素(如集散道)而使鄰近區域之居 民受惠,如此一來其 aij值可能為[0, 1]之分數值。式(16)為預算限制,確保所選取的計 劃經費的加總,不超過預算總額。 式(17)則為針對各個計劃,限制不能與其同時執行的計劃,不會同時被選取。本 研究將式(17)可能出現之情形分為三種。 1. 某些計劃本質上並不相容、是不能同時選擇。例如,同一計劃不同程度的規模、 或不同形式的版本,是不能同時選擇的;又例如,使用同一資源(如同一塊土地) 的多個計劃也不能同時選擇。這也類似也就是類似鄧振源(民國 81 年)以及 Teng and Tseng (1996)所謂的替代關係。 2. 將共同執行的利益(或成本)會與個別執行所產生的利益(或成本)總合不同的計 劃,也就是類似鄧振源(民國 81 年)以及 Teng and Tseng (1996)所謂的互補關係, 皆獨立新設一個變數來代表之。例如,共同執行效益(或成本)會發生變化的兩 個計劃,以 x1與 x2代表其個別執行的決策,則另外設立一個二元決策變數 x3 表示之,代表同時執行之決策。也因此,以下二限制式 x1+ x3 1 以及 x2+ x3 1 必須滿足,來確保不能同時執行的計劃不至於同時被選取。 3. 同時包含上述二種情況,將所有不能同時執行的關係納入集合 R,並透過限制 式(17)來確保計劃選擇的相容性。 如同第一章所述,集合涵蓋問題看似易解,實際上仍是一個 NP-complete 問題, 當問題規模變大時,求解時間呈指數時間增加,將耗費大量運算。為了避免窮舉集合, 一般可針對涵蓋限制式,或整數限制式加以放鬆。本研究選擇對區域涵蓋限制放鬆。 然而僅放鬆涵蓋限制,即成為類似背包問題之模式,亦為 NP-complete 性質,因此本 研究亦將對容量限制之預算限制式放鬆,再運用拉式鬆弛法進行求解。因此下一節將 回顧拉式鬆弛法之基本概念。
3.3 集合涵蓋模式與拉式鬆弛法
移至目標式中,可得到新的目標式,將此方程式以 L(u)稱之,其中 u 表示所有拉式乘 數(ui)組成之行向量。經過拉式鬆弛法放鬆後之問題稱為拉式問題。本研究參考 Carprara et al. (1999)之文獻,一般的集合涵蓋模式,經放鬆後之模式如下。
J j i I i j j u x u c Min u L( ) ( ) (19) s.t. xj{0,1}, jJ (20) 其中 cj(u)所代表之式子如下: J j u c u c j I i i j j
, ) ( (21) Ij:針對集合 j,所有被涵蓋項目所成之集合。 已知 u 的情況下,上述之最小化問題可由式(21)決定,其求解相當容易,可分為 以下三個情況。 cj(u) < 0, xj = 1 cj(u) > 0, xj = 0 cj(u) = 0, xj = 1 或 0 由上述三種情況可得到一個鬆弛解及 L(u)值,且此值是根據放鬆限制式後求得, 因此可視為原問題之下限值(Lower Bound, LB)。 但鬆弛解對原問題而言顯然為不可行解,須根據原問題之限制式修正為可行解, 才能得到上限值(Upper Bound, UB)。得到上限值與鬆弛下限值後,即可根據兩值夾擠 出最佳解所在之區間並得到誤差範圍,若誤差範圍等於零,意即上下限值相等,得到 最佳解﹔若誤差範圍在容忍值內,則表示雖僅得到近似最佳解,但為一個可接受之近 似解,該解與最佳解的最大差距等於容忍值。最後則是誤差範圍在容忍值外,表示尚 未找到可接受的解,需繼續進行求解,但不保證一定能收斂找到近似最佳解。因此若 演算法設計適當,通常可找到品質不錯之近似解或最佳解,否則會有無法收斂的情形, 此亦為拉式鬆弛法判斷是否繼續求解的停止機制。 在求解過程中,還需要藉由逐步更新 u 來改善 L(u)值,使能逐漸收斂。本研究採 用一般拉式鬆弛法所使用之次梯度法(subgradient method),參考 Held and Karp (1970) 的更新拉式乘數方程式來調整 u:I i u s u s u L UB u u i t t t t t i t i , 0 ), ( ) ( ) ( max 2 1 (22) 其中, I i u x u s i J j t j t i
, ) ( 1 ) ( (23) Ji:對項目 i 而言,所有涵蓋此項目之集合所成之集合。 式(23)的 si(ut)代表 ui值的修正方向,透過適度修正使求解過程逐漸往最佳解前進, 其涵義為項目 i 的被涵蓋次數。當 si(ut)=0 時,表示該項目僅被涵蓋一次﹔當 si(ut)=1, 表示該項目未被涵蓋﹔當 si(ut)為負值時,代表該項目被涵蓋超過一次,負值愈大,涵 蓋次數愈多,可看出與式(12)之關係。 式(22)中之||si(ut)||2為 si(ut)的長度平方,意思是調整的步幅。其原則為當該向量長 度平方為大時,代表方向的誤差仍大,所以除以||si(ut)||2用以降低步幅,避免誤差仍大 時,過度地修正 u 值。 L(ut)為第 t 次遞迴所求得之下限值,為拉式放鬆問題的現行解。UBt為第 t 次之上 限值,可利用修正不可行解後,由原問題求出可行解。兩值之差代表最佳解所在之誤 差範圍,藉由調整 u 值以收斂求解。 α 為更新 u 值之步幅調整參數,主要為避免修正幅度過大或過小。本研究參考文 獻,可令 α=0.1 作為初始設定,根據求解次數或解的品質來調整,以加快收斂速度或 減緩調整幅度以求得較佳的解。 u 的初始值則可根據貪心法則求得,如 Carprara et al. (1999)針對每個 ui檢視所有 包含項目 i 的集合,選擇該集合成本除以該集合所包含之項目個數最小者。3.4 拉式鬆弛模型及求解
經由上述之文獻回顧,本研究針對式(15)使用拉式鬆弛法放鬆限制。λi代表式(15) 之拉式乘數,放鬆該限制式至目標式後,發現原問題類似背包問題(Knapsack Problem, KP),仍然具有 NP-complete 的特性,因此需再對式(16)進行放鬆。π 代表式(16)之拉式
I i i J j j j I i ij i j a c x G b Min L(,) ( ) ( ) (24) s.t.
J j j rjx r R f 1, (25) J j binary xj , (26) 其中,可令拉式成本如下。 j I i ij i j j b a c c
) , ( (27) 拉式乘數更新的部分,如同上一節所述各項式子之意義,本研究針對式(15)及(66) 放鬆,因此有二個更新式如下。 I i s s L UB t i t t t t t i t i , 0 ), ( ) ( ) , ( max 2 1 (28) 0 ), ( ) ( ) , ( max 2 1 t t t t t t t s s L UB (29) 其中式(28)中之 si(λt)如下。 I i x s i J j t t j t i
, ) , ( 1 ) ( (30) 式(29)中之 s(πt )如下。 I i x c G s i J j t t j j t
, ) , ( ) ( (31) Ji:對地區 i 而言,所有涵蓋此地區之集合所成之集合。 α, β:式(28)及式(29)的步幅調整參數。 求得 L(λ, π)值,由拉式乘數皆大於 0,可將此解作為式(14)的下界(Lower Bound, LB)。本研究並以線性放鬆法(LP-Relaxation)做為求解拉式問題之方法,於 3.4.1 節進 行探討。 3.4.1線性放鬆法為了降低計算複雜度與求解時間,本研究將拉式鬆弛模型中之二元整數限制式(26) 放鬆,使原問題由二元整數規劃變為線性規劃問題,稱為整數規劃之線性放鬆法,如 式(32)。 J j xj 1 , 0 (32) 針對最小化的目標式,將拉式乘數代入後,透過一般的線性規劃軟體即可求解, 然而上述以線性規劃模式求得的解,有可能出現非整數解,因此必須進行調整,方法 如下。
觀察式(25),其等式符號為「」,且左手方(left hand side)之係數矩陣為 0-1 矩陣, 由此,可知將線性解中,非整數解的部分皆設定為 0,此解對於線性放鬆問題而言必 定為可行解,且對於變數為二元整數限制之整數規劃問題亦為可行解。因二元整數規 劃問題之解空間必為線性放鬆問題之解空間的子集,如圖 7 所示。圖 8 則為本研究原 問題、拉式鬆弛問題、線性放鬆之拉式鬆弛問題,以及原問題可行解的目標值對應關 係。 圖 7 線性放鬆問題及二元整數規劃其可行解空間之關係 最佳解 可行解上限值(UB) LR下限值 LR線性放鬆下限值(LB)
但式(25)中,右手邊常數皆為 1,frj亦為較單純的 0-1 整數,相較於原問題較為複雜的 限制式,對拉式鬆弛問題使用線性放鬆法顯然更能降低求解的複雜性。 求出拉式鬆弛問題之解後,其鬆弛解亦可能違反限制式(15)之涵蓋要求,以及限 制式(16)之預算上限,故對原問題而言為不可行解。對於求出可行解以得到上限值之 啟發式解法,以及起始拉式乘數的設定,將於下一節說明。
3.5 產生可行解
求出拉式問題之解後,本研究將利用拉式解以及拉式乘數提供之資訊求出可行解 並得到上限值,如以下三步驟。 Step1. 若目前的解違反限制式(15),則檢視涵蓋情形為 0 的部分,並列出可涵蓋這 些地區的計劃,按照計劃成本除以該計劃所涵蓋的地區數,升冪排列,然 後依序加入計劃至恰滿足限制式為止。 Step2. 若違反預算限制式(16),則計劃按拉式成本 cj(λ,π)降冪排序,cj(λ,π)值愈大, 移除之則對目標式影響較小。並且在不違反限制式(15)的情形下將計劃移除 至恰滿足預算限制式為止。 Step3. 若預算仍有空間可再加入計劃,則如同前述方法,cj(λ,π)值愈小或愈負,對 目標式愈有利,愈適合加入,至預算分配完畢為止。而上述所有程序皆必 須隨時注意不可違反限制式(17)。以此可得該次遞迴運算的可行解及上限值 UBt。 其中需要注意的是,在 Step2 完成後,計劃組合之成本仍有可能超出總預算,若 發生此情形,則視為本次遞迴已無法求得可行解與上限值,放棄該次遞迴剩餘的求解 步驟,上限值 UBt直接設定為 0,而後由拉式乘數調整式(28)與(29)可知,調整之步幅 加大,以使演算法在下一次遞迴中更有可能求得可行解。本研究將產生可行解之流程 以圖 9 呈現。圖 9 可行解流程圖 另外,在初始拉式乘數方面,為了避免設定過小或過大的初始值,造成收斂速度 過慢,應設定一合理值,使求解能迅速往最佳解的方向收斂,本研究之初始拉式乘數 設定皆以 0 開始,再視演算法之求解效能做調整。圖 10 為數值測試中本研究之啟發式 演算法遞迴 500 次,上界值(UB)與下界值(LB)之收斂情形。 圖 10 UB 與 LB 之收斂情形
3.6 演算法流程
本研究將運輸計劃選擇問題描述為集合涵蓋問題後,使用拉式鬆弛模型求解拉式 鬆弛解 滿足涵蓋限制? 滿足預算限制? 依step1加入計劃 是否仍有預算? 依step3加入計劃 得可行解 及UB 依step2刪除計劃 滿足預算限制? 放棄求解 UB = 0 是 是 是 否 否 否 否 是圖 11 演算法流程圖 停止條件之機制部分,本研究參考過去文獻,目前利用「集合涵蓋問題的解趨於 穩定」、「當遞迴次數達到設定之次數」,作為停止最佳解搜尋之條件。而目前參數 使用以經驗法則為主,整體遞迴次數則依照題目規模再做修正。 1. 讀取範例資訊 2. 產生初始拉式乘數 λi及π (如 3.4 節末所述) 1. 計算式(27)之 cj(λ, π)值 2. 求解式(24)、(25)及(32)之拉式鬆弛問 題 3. 計算式(30)與式(31)之 si(λ)與 s(π)值 (梯度方向) 是否為可行解 1. 得集合涵蓋問題之解及 UB 值 2. 以式(28)及(29)更新 λ 及 π 修正為集合涵蓋問題之 可行解(如 3.4 節所述) 符合停止條件 得近似解 是 是 否 否
第四章 數值測試
本研究針對中大型之交通建設計劃,提出數學規劃模式,並考量區域涵蓋限制以 及計劃間的相關性,欲達成總效益最大化的目標。在第三章,數學模式與演算法之介 紹後,本研究將於第四章利用數值範例進行演算法的效能測試與分析。 本研究首先將於 4.1 節以臺灣實務交通建設計劃套用本研究之模式,並加以分析 其適用性。其後,將於 4.2 節自行設計數值例題,並於 4.3 節據以測試演算法之效能。4.1 實務問題之測試與分析
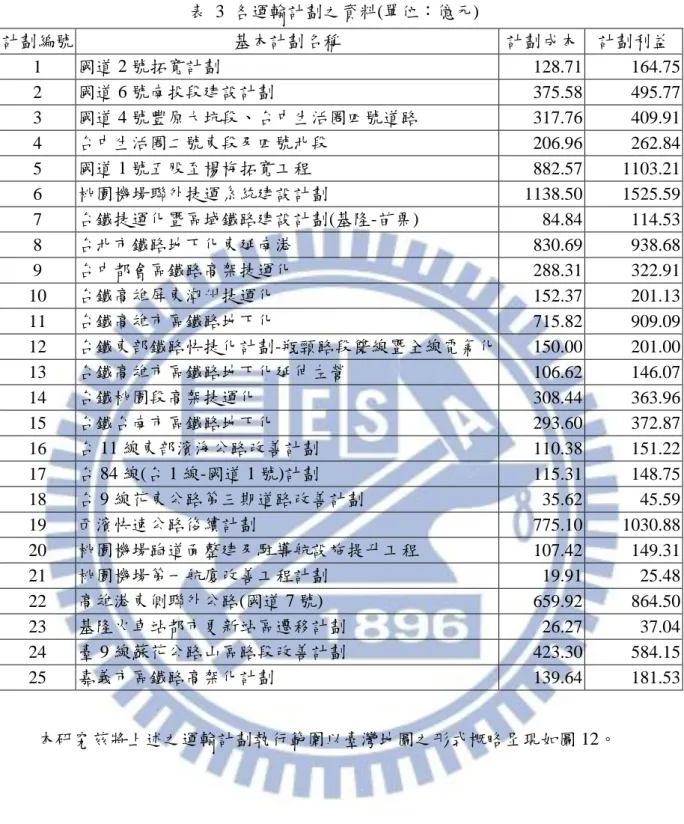
由於實務問題之資料取得不易,因此本研究以過去文獻所提之測試問題加以修改 並分析之。牛紀芸(2011)以公共工程委員會於民國 99 年所列管之總經費十億元以上重 大公共建設為例,考慮其交通部類別之計劃做為實務數值範例,並針對部分難以取得 實際資料之參數予以假設,亦對各運輸計劃進行相關性之評估。基本運輸計劃之資料 如表 3 所示。表 3 各運輸計劃之資料(單位:億元) 計劃編號 基本計劃名稱 計劃成本 計劃利益 1 國道 2 號拓寬計劃 128.71 164.75 2 國道 6 號南投段建設計劃 375.58 495.77 3 國道 4 號豐原大坑段、台中生活圈四號道路 317.76 409.91 4 台中生活圈二號東段及四號北段 206.96 262.84 5 國道 1 號五股至楊梅拓寬工程 882.57 1103.21 6 桃園機場聯外捷運系統建設計劃 1138.50 1525.59 7 台鐵捷運化暨區域鐵路建設計劃(基隆-苗栗) 84.84 114.53 8 台北市鐵路地下化東延南港 830.69 938.68 9 台中都會區鐵路高架捷運化 288.31 322.91 10 台鐵高雄屏東潮州捷運化 152.37 201.13 11 台鐵高雄市區鐵路地下化 715.82 909.09 12 台鐵東部鐵路快捷化計劃-瓶頸路段雙線暨全線電氣化 150.00 201.00 13 台鐵高雄市區鐵路地下化延伸左營 106.62 146.07 14 台鐵桃園段高架捷運化 308.44 363.96 15 台鐵台南市區鐵路地下化 293.60 372.87 16 台 11 線東部濱海公路改善計劃 110.38 151.22 17 台 84 線(台 1 線-國道 1 號)計劃 115.31 148.75 18 台 9 線花東公路第三期道路改善計劃 35.62 45.59 19 西濱快速公路後續計劃 775.10 1030.88 20 桃園機場跑道面整建及駐導航設施提升工程 107.42 149.31 21 桃園機場第一航廈改善工程計劃 19.91 25.48 22 高雄港東側聯外公路(國道 7 號) 659.92 864.50 23 基隆火車站都市更新站區遷移計劃 26.27 37.04 24 臺 9 線蘇花公路山區路段改善計劃 423.30 584.15 25 嘉義市區鐵路高架化計劃 139.64 181.53 本研究茲將上述之運輸計劃執行範圍以臺灣地圖之形式概略呈現如圖 12。
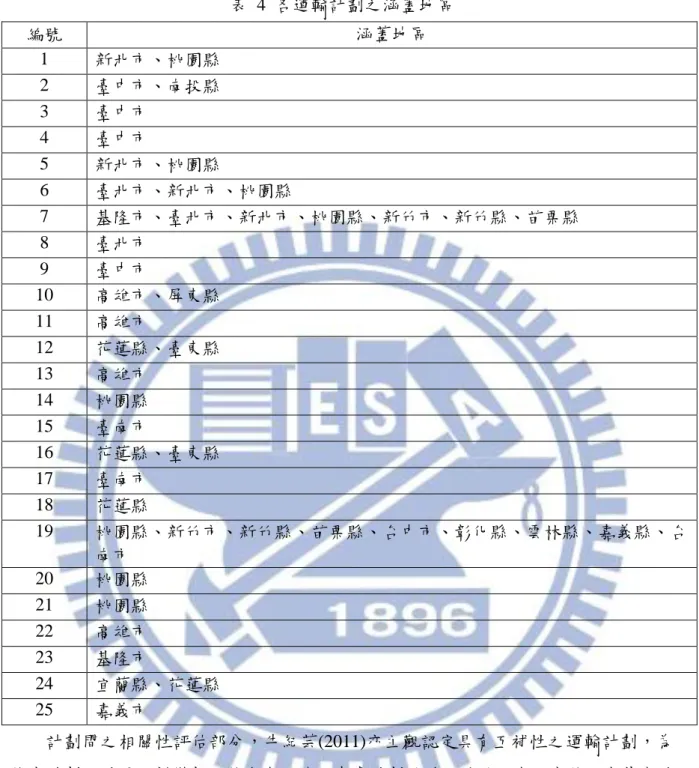
圖 12 各運輸計劃之執行區域
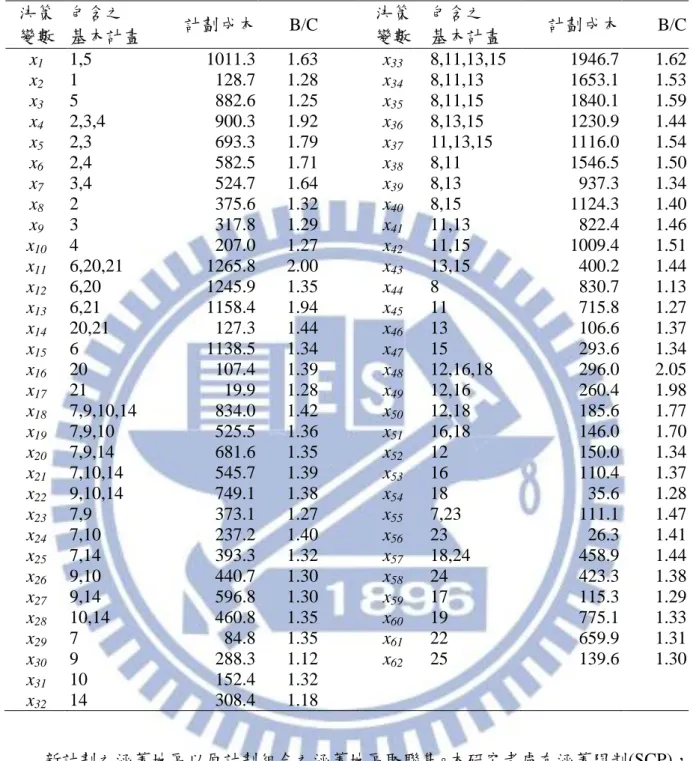
表 4 各運輸計劃之涵蓋地區 編號 涵蓋地區 1 新北市、桃園縣 2 臺中市、南投縣 3 臺中市 4 臺中市 5 新北市、桃園縣 6 臺北市、新北市、桃園縣 7 基隆市、臺北市、新北市、桃園縣、新竹市、新竹縣、苗栗縣 8 臺北市 9 臺中市 10 高雄市、屏東縣 11 高雄市 12 花蓮縣、臺東縣 13 高雄市 14 桃園縣 15 臺南市 16 花蓮縣、臺東縣 17 臺南市 18 花蓮縣 19 桃園縣、新竹市、新竹縣、苗栗縣、台中市、彰化縣、雲林縣、嘉義縣、台 南市 20 桃園縣 21 桃園縣 22 高雄市 23 基隆市 24 宜蘭縣、花蓮縣 25 嘉義市 計劃間之相關性評估部分,牛紀芸(2011)亦主觀認定具有互補性之運輸計劃,為 複合計劃,並另立新變數,將成本加總且考慮計劃效益之綜效,本研究將所有基本計 劃及複合計劃整理如表 5。
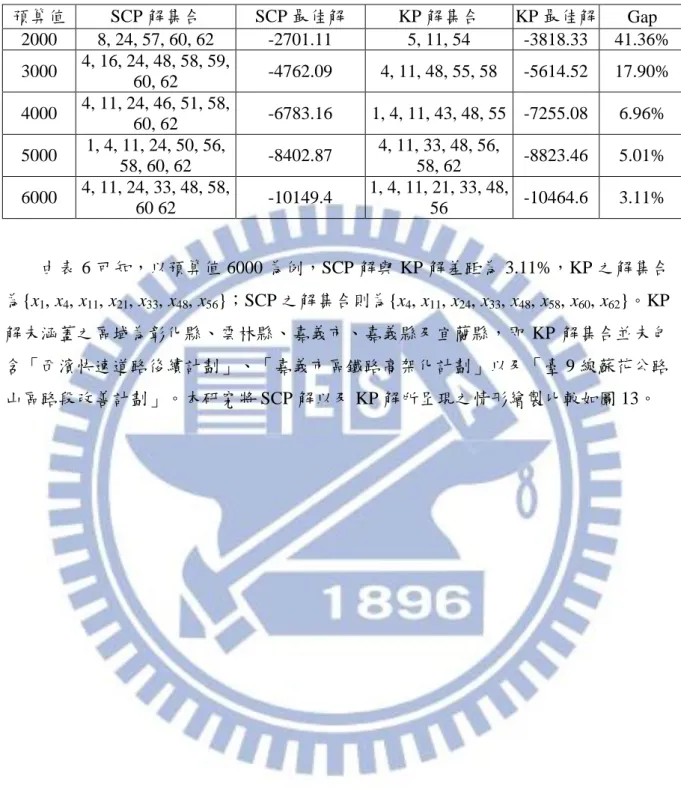
表 5 實務問題之相關性評估結果 決策 變數 包含之 基本計畫 計劃成本 B/C 決策 變數 包含之 基本計畫 計劃成本 B/C x1 1,5 1011.3 1.63 x33 8,11,13,15 1946.7 1.62 x2 1 128.7 1.28 x34 8,11,13 1653.1 1.53 x3 5 882.6 1.25 x35 8,11,15 1840.1 1.59 x4 2,3,4 900.3 1.92 x36 8,13,15 1230.9 1.44 x5 2,3 693.3 1.79 x37 11,13,15 1116.0 1.54 x6 2,4 582.5 1.71 x38 8,11 1546.5 1.50 x7 3,4 524.7 1.64 x39 8,13 937.3 1.34 x8 2 375.6 1.32 x40 8,15 1124.3 1.40 x9 3 317.8 1.29 x41 11,13 822.4 1.46 x10 4 207.0 1.27 x42 11,15 1009.4 1.51 x11 6,20,21 1265.8 2.00 x43 13,15 400.2 1.44 x12 6,20 1245.9 1.35 x44 8 830.7 1.13 x13 6,21 1158.4 1.94 x45 11 715.8 1.27 x14 20,21 127.3 1.44 x46 13 106.6 1.37 x15 6 1138.5 1.34 x47 15 293.6 1.34 x16 20 107.4 1.39 x48 12,16,18 296.0 2.05 x17 21 19.9 1.28 x49 12,16 260.4 1.98 x18 7,9,10,14 834.0 1.42 x50 12,18 185.6 1.77 x19 7,9,10 525.5 1.36 x51 16,18 146.0 1.70 x20 7,9,14 681.6 1.35 x52 12 150.0 1.34 x21 7,10,14 545.7 1.39 x53 16 110.4 1.37 x22 9,10,14 749.1 1.38 x54 18 35.6 1.28 x23 7,9 373.1 1.27 x55 7,23 111.1 1.47 x24 7,10 237.2 1.40 x56 23 26.3 1.41 x25 7,14 393.3 1.32 x57 18,24 458.9 1.44 x26 9,10 440.7 1.30 x58 24 423.3 1.38 x27 9,14 596.8 1.30 x59 17 115.3 1.29 x28 10,14 460.8 1.35 x60 19 775.1 1.33 x29 7 84.8 1.35 x61 22 659.9 1.31 x30 9 288.3 1.12 x62 25 139.6 1.30 x31 10 152.4 1.32 x32 14 308.4 1.18 新計劃之涵蓋地區以原計劃組合之涵蓋地區取聯集。本研究考慮有涵蓋限制(SCP), 以及無涵蓋限制(KP)之情境,並以不同的預算水準進行數值測試,結果如表 6。
表 6 實例數值測試結果 預算值 SCP 解集合 SCP 最佳解 KP 解集合 KP 最佳解 Gap 2000 8, 24, 57, 60, 62 -2701.11 5, 11, 54 -3818.33 41.36% 3000 4, 16, 24, 48, 58, 59, 60, 62 -4762.09 4, 11, 48, 55, 58 -5614.52 17.90% 4000 4, 11, 24, 46, 51, 58, 60, 62 -6783.16 1, 4, 11, 43, 48, 55 -7255.08 6.96% 5000 1, 4, 11, 24, 50, 56, 58, 60, 62 -8402.87 4, 11, 33, 48, 56, 58, 62 -8823.46 5.01% 6000 4, 11, 24, 33, 48, 58, 60 62 -10149.4 1, 4, 11, 21, 33, 48, 56 -10464.6 3.11% 由表 6 可知,以預算值 6000 為例,SCP 解與 KP 解差距為 3.11%,KP 之解集合 為{x1, x4, x11, x21, x33, x48, x56};SCP 之解集合則為{x4, x11, x24, x33, x48, x58, x60, x62}。KP 解未涵蓋之區域為彰化縣、雲林縣、嘉義市、嘉義縣及宜蘭縣,即 KP 解集合並未包 含「西濱快速道路後續計劃」、「嘉義市區鐵路高架化計劃」以及「臺 9 線蘇花公路 山區路段改善計劃」。本研究將 SCP 解以及 KP 解所呈現之情形繪製比較如圖 13。
解更高出 SCP 解 41.36%。SCP 之解集合為{ x8, x24, x57, x60, x62};KP 之解集合則為{ x5,
x11, x54}。
由圖 14 可知,在預算值為 2000 之情況下,運輸計劃的選擇已然相當極端,SCP 之解集合與 KP 之解集合相同之處僅有「國道 6 號南投段建設計劃」一項。KP 之解集 合中有較多的未涵蓋區域,而 SCP 解仍維持每個地區皆涵蓋至少一次,此一結果應能 與 1.2.2 節切合。 圖 15 SCP 與 KP 最佳解之差距折線圖
4.2 設計例題
本研究以隨機方式產生例題,並使其盡可能符合實際情形,所需的資料有:產生 可涵蓋區域範圍的計劃情境、計劃的成本及益本比設定、計劃間之相關性判定,以及 產生新計劃的成本及利益設定。 1. 產生可涵蓋區域範圍之計劃情境 本研究須先定義區域範圍,而後才可決定計劃涵蓋之區域。 假設有一均質平面(Homogeneous surface),在此平面中劃分若干均等之正方形區 域,每個正方形之中心點為行政中心,正方形之邊長設為 10,意義上為行政區域之邊 界。每個區域之土地資源相同,且人口分布均勻,相應之收入分布、貨物需求及消費 方式均一致。區域中之人口亦以區域中心為主要的通勤旅次起訖點。 各類運輸計劃之執行或建設中心以均勻亂數落於該空間中,計劃之影響涵蓋範圍 則以圓形表示,涵蓋範圍大小則以圓形之半徑決定,其中半徑亦為均勻亂數。 若一個運輸計劃之涵蓋半徑愈大,或涵蓋範圍包含人口密度較大之區域中心,則 0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 2000 3000 4000 5000 6000 預算值 Gap域之中心地與一個運輸計劃之圓心距離為 d,若 d 介於計劃範圍的特定程度,則將有 不同的涵蓋情形,本研究將所提出之情形列舉如下: (1) d 0.5r,則 aij = 1 (2) 0.5r < d r,則 aij = 3/4 (3) r < d 1.5r,則 aij = 2/4 (4) 1.5r < d 2r,則 aij = 1/4 (5) 2r < d,則 aij = 0 以下為簡單範例說明: rg d 0 30 30 ★ Region center Project center ▲ g
(a) Coverage level
1 2 3 4 5 6 7 8 9 圖 16 本研究假設之區域空間及計畫涵蓋情形 如圖 16 所示,假設有一均質平面為 x, y 軸範圍介於[0, 30]的空間,並於該空間劃 分為 9 個均等區域。計劃 g 之圓心(m, n)為介於[0, 30]的均勻亂數所決定,其半徑 rg為 [3, 10]的均勻亂數所決定,避免半徑過大或過小導致涵蓋範圍過於極端。圖中之計劃 g 即涵蓋了第 1、第 2、第 4 及第 5 地區,但由於該計劃之圓心與地區 1、2、4、5 之距 離皆小於 0.5rg,故 a11、a21、a41及 a51皆小於 1。本研究產生計劃之原則為至少可使所 有計劃涵蓋所有地區,以避免限制式(15)無法滿足,導致無可行解的情形發生。另外, 若將 x, y 軸範圍擴大為[0, 50],則區域數則增加為 25 個,以此類推。本研究即以此方 法擴大區域數量。
2. 計劃之成本及益本比設定 本研究設計例題之計劃成本以半徑決定,為 10×r2,因此若計劃之半徑愈大,則其 執行或建設的成本愈高。計劃之利益則以成本乘上益本比而得,益本比則參考近年國 內公共建設之資料,做一合理假設,為介於[1.0, 1.3]之均勻亂數。 3. 計劃間之相關性評估 計劃間之相關性方面,過去文獻皆是由專家學者進行相關性及互補性評估,但目 前之評估過程尚無針對此問題進行分析,因此為了降低評估的複雜性,本研究以計劃 涵蓋區域是否相鄰或重疊來兩兩成對評估計劃間之相關性。例如,若有二獨立計劃 g、 h,其兩圓心之歐幾里得距離(Euclidean distance) f(g, h) 小於或等於兩計劃之半徑和 rg+rh, f(g, h) rg+rh 則可知兩計劃為相鄰或重疊,即為互補類計劃,合併執行具有綜效,並設立一個 新的計劃 e 代表之。新計劃的區域涵蓋範圍則取兩者之聯集。 0 30 30 g h ▲ ▲ rg rh (b) Project interdependency 圖 17 相關性之評估 關於替代類計劃的判定,若 e 為 g、h 所組成的新計劃,則 e 與 g、h 相互為替代 類計劃,限制式表示如下。
實務上,若經專家評估具有替代性的計劃,亦可設立限制式,皆不違反式(17)的 精神。 本研究中計劃之相關性評估以原計劃群成對比較為主,新計劃與原計劃之間是否 具有相關性,其機制趨於複雜,故本研究尚不考慮進一步的評估。 4. 新計劃之成本及利益設定 新計劃具有綜效,不單只是原始二計劃成本效益的加總,可能為成本的節省,或 效益的增加。本研究針對新計劃的成本,乘上倍數為[0.7, 1.1]的均勻亂數,效益倍數 為[0.9, 1.2]之均勻亂數。例如: ce = (cg + ch) × rand[0.7, 1.1] pe = (pg + ph) × rand[0.9, 1.2]
4.3 設計例題測試結果
依 4.2 節所述之方法,本研究設計了四種規模之例題,原始計劃數分別為 50、100、 150 及 200 個計劃,且計劃數愈多,區域總數及預算限制亦增加。每一種規模皆產生 30 個例題,藉以測試本研究演算法之效能。 本研究之數學規畫模型為具有背包問題及集合涵蓋問題特性之模式,具有 NP-complete 性質。因此,本研究欲測試二元整數規畫模型(3.2 節)之求解能力,以及 在大規模例題時,拉式鬆弛啟發式演算法求解品質的優劣。測試環境為 Windows XP SP3,Intel® Core™ 2 Duo CPU E8400 3.00GHz,2G RAM。測試軟體為 MATLAB® R2009a,GLPKMEX 工具箱。測試結果以各規模之平均值呈現,如表 7。 表 7 例題測試結果 規模 平均總計 劃數 平均限制 式數 地區數 預算 IP Time LR TimeSolution Quality Bound Quality Mean Std. Mean Std. 50 265 455 25 10000 0.87 3.37 0.53% 0.63% 1.76% 1.27% 100 570 993 49 20000 11.47 5.86 0.20% 0.15% 1.07% 0.65% 150 821 1424 81 30000 66.47 12.35 0.32% 0.17% 1.67% 0.54% 200 1012 1745 121 40000 224.97 14.69 0.63% 0.60% 1.90% 0.80% IP Time 為最佳解平均求解時間(秒)。 LR Time 為本研究拉式鬆弛啟發式演算法平均求解時間(秒)。
Solution Quality 為演算法平均上限值(Upper Bound, UB)與最佳解之差距。 Bound Quality 為演算法平均下限值(Lower Bound, LB)與最佳解之差距。
本研究亦將上述測試結果以折線圖呈現,如圖 18 及圖 19。 圖 18 演算法上下限值與最佳解之差距折線圖 圖 19 平均最佳解與演算法求解時間折線圖 本研究將原問題利用拉式鬆弛法將限制式放鬆後,再經由線性放鬆法放鬆二元整 數限制,所求得之下界值並非原問題之下界值,乃為拉式鬆弛模型之下界值,因此可 知此下界值可能會與原問題最佳解之差距較大。由表 7 及圖 18 可知,無論是小規模或 較大規模之例題,演算法下界值與最佳解之平均差距皆在 2%以下,且演算法上界值 與最佳解之平均差距皆小於 1%,較前者更低,顯見本研究之拉式鬆弛法其收斂能力 尚佳,而本研究提出求解上界值之啟發式演算法亦能求得品質不錯的解。在求解速度 方面亦明顯比最佳解求解時間為快(圖 19)。 0.00% 0.50% 1.00% 1.50% 2.00% 50 100 150 200 Bound Quality Solution Quality 0 50 100 150 200 250 50 100 150 200 IP Time LR Time