應用格位傳送模式建構高速公路動態起迄矩陣推估演算法
66
0
0
全文
(2) 應用格位傳送模式建構高速公路動態起迄矩陣推估演算法 Dynamic Freeway Origin-Destination Matrices Estimation Algorithm with Cell Transmission Modeling Student:Pei-Shan Hsu. 研究生:許珮珊. Advisor:Yu-Chiun Chiou. 指導教授:邱裕鈞. 國立交通大學 交通運輸研究所 碩士論文. A Thesis Submitted to Department of Institute of Traffic and Transportation College of Management National Chiao Tung University In Partial Fulfillment of the Requirements For the Degree of Master in Traffic and Transportation June 2009 Taipei, Taiwan, Republic of China. 中. 華. 民. 國. 九. 十. 八. 年. 六. 月.
(3) 應用格位傳送模式建構高速公路動態起迄矩陣推估演算法 學生:許珮珊 指導教授:邱裕鈞 博士 國立交通大學交通運輸研究所碩士班. 摘要 正確的動態起迄資訊需要有即時的交通控制調查結果,如即時路徑導引以及 號誌控制。過去許多文獻企圖藉由所獲得的主線與匝道流量,來發展動態 OD 矩 陣推估演算法,然而,此課題中都存在著相同的問題,即為推估參數的數量仍遠 多於所獲得的可用資訊,導致動態 OD 矩陣推估為一相當大的挑戰。因此,必須 增加額外的假設或是外生的資訊,如路徑選擇行為、歷史 OD 矩陣,或是已知的 依時性交通流量資料等。 其中,在動態 OD 矩陣推估的課題中,最具挑戰性的問題為依時 OD 矩陣中 旅行時間變異之影響,相關的研究皆假設於某時間點進入高速公路路段中車輛的 到達型態,均會分佈在固定的小範圍內或是服從某種分配,然而,當某 OD pair 之運行係經過距離較長的路廊或是壅塞路段時,旅行時間之變異就會相當大,該 結果將對交通產生消散的影響,進一步影響推估結果。因此,嚴謹的動態起迄矩 陣推估模式,需要具備於不同交通條件下,正確的預測車輛的到達型態。基此, 為了能在不同的交通情況下有效率且準確的獲取車輛到達型態之交通行為,本研 究藉由結合進階卡門濾波(extended Kalman filtering, EKF)與格位傳送模式(cell transmission model, CTM)來建構遞迴的動態 OD 矩陣推估演算法,藉由該方法模 擬車輛運行的行為,並預測各依時 OD pair 之到達型態,以便推估動態 OD 矩陣。 為驗證此演算法之績效,本文以每 6 秒為 1 時階,同時藉由 6 個 OD pair 之 小路網推估 90 分鐘的 OD 矩陣為一驗證範例。首先給定一組動態 OD 矩陣,並 藉由 DynaTAIWAN (Dynamic Traffic Assignment and Information in Wide Area Network) 模式模擬路段流量以獲得計算 EKF 之相關資訊。同時為比較本模式於 旅行時間預測之績效,以 Greenshields 巨觀模式預測車輛旅行時間並假設進入路 網之車輛會於兩時階範圍內到達迄點。結果顯示本模式推估結果之 RMSE 為 0.073 遠較 Greenshields 之 0.145 為低。此外本研究亦針對不同交通流量及高速公 路路網設計作敏感度分析,結果顯示本模式推估之正確率會隨著交通流量增加而 有些微的減低;然而,不同交流道路網的設計並未對演算法之績效有顯著的影 響。另外為分析此演算法之應用範疇,本文以國道 1 號路網進行兩組實驗分別為: 楊梅至泰山收費站之小規模路網及台中至台北間所有交流道之大規模路網,上述 實驗結果之 RMSE 仍在可接受範圍內,分別為 0.133 與 0.125。透過上述,足以 證明本研究所提出之演算法的績效與適用範圍。 關鍵字: 動態起迄矩陣推估、進階卡門濾波、格位傳送模式. I.
(4) Dynamic Freeway Origin-Destination Matrices Estimation Algorithm with Cell Transmission Modeling Student: Pei-Shan Hsu Advisor: Dr. Yu-Chiun Chiou Institute of Traffic and Transportation National Chiao Tung University. Abstract Accurate dynamic origin-destination (O-D) information is required for the implementation of real-time traffic control measures, such as real-time route guidance and signal control. Numerous studies have devoted to developing estimation algorithms for the dynamic O-D matrix based mainly on observable mainline and ramp flow rates. However, this issue remains challenging in that the number of parameters to be estimated is always far greater than the available information, thus additional assumption or exogenous information, such as route choice behaviors, priori O-D matrix information, sequence of observational periods of traffic counts data should be further considered. One of the most challenging issues remained to be tackled in the context of dynamic O-D matrices estimation is the impact of travel time variability on the time-varying O-D matrices. Related studies commonly assumed that the vehicles entering the freeway in a time interval will arrive at their destination in a small time range or in a certain distribution. However, if O-D pair traffic traverses a sufficiently long distance or experiences moderate to heavy congestions, then the travel time variability may be rather large, which can result in a serious traffic dispersion phenomenon. Thus, an accurate prediction model for the arrival distribution of entering O-D pair traffic under various traffic conditions is undoubtedly imperial for dynamic O-D matrices estimation. To efficiently and accurately capture the traffic behaviors along with their arrival distributions under various traffic conditions, this study proposes iterative dynamic O-D matrices estimation algorithm by combining extended Kalman filtering (EKF) and cell transmission model (CTM) to simulate the traffic movement behaviors, to predict the arrival distributions of all O-D pair traffic in various time intervals, and then to estimate the dynamic OD matrices. To validate the performance of the proposed estimation algorithm, an exemplified example of a small freeway corridor with a total of six O-D pairs and a set of 90 minutes O-D matrices, varying at every six seconds. With the given dynamic O-D traffics, DynaTAIWAN (Dynamic Traffic Assignment and Information in Wide Area Network) is then used to simulate the link flows to facilitate the tuning process of EKF. For comparison, the performance of a model which uses the Greenshields macroscopic model to predict travel time and assumes entering traffics will arrive at their destination within two time intervals is also computed. The results show that the proposed model can obtain a relatively accurate estimation result with RMSE=0.073, which is much lower than the compared model with RMSE=0.145. Sensitive analysis on various traffic demands and freeway network layouts show that the accuracy of the proposed model would be slightly lowered down once the traffic demand increases. However, the various network layouts do not remarkably affect the algorithm II.
(5) performance. To further investigate the applicability of the proposed algorithm, two case studies of Taiwan Freeway No.1 corridors: small-scaled network (Yangmei toll station to Taishan toll station) and large-scaled network (Taichung interchange to Taipei interchange) are conducted. The results show that the proposed algorithm can still obtain acceptable RMSE values of 0.133 and 0.125 respectively. The performance and applicability of the proposed algorithm have been proved.. Keywords: Dynamic OD estimate, Extended Kalman filtering, cell transmission model. III.
(6) 誌謝 「畢業了!」多麼令人歡欣鼓舞的ㄧ刻啊!真的是捱過了層層的考驗啊!接 著又將邁向另ㄧ階段人生的旅程了。 本論文得以順利完成,實屬 邱裕鈞老師不斷的給予指導與鼓勵之功勞,感 謝老師總能在我深陷痛苦時適時伸出援手,幫學生指點迷津,老師認真與嚴謹的 研究態度永遠都是我學習及努力的榜樣。 承蒙胡大瀛老師與胡守任老師過去的教導與提攜,使學生奠定良好的學習基 礎與求學態度,並感謝兩位老師能於口試審查時給予許多寶貴的意見,使本論文 能更臻完備,未來必定也會遵循老師們的教誨持續努力。 研究過程總是艱辛與孤獨的,這當中若缺少同儕的陪伴與鼓勵必定會使兩年 的碩士生涯黯淡無趣。謝謝達叔、柏辰、mini、筱婷、子婷隨時在旁互相督促, 是彼此學習的好夥伴;阿勳生活上玩樂與調劑的好友、辣椒是博學多聞的知識 庫、派大星不離不棄的守護好友、「辛辛向蓉」研究室的駐守員、開始總會認為 是「歐陽」親戚的小銘、得饒人處不饒人的律友與 pala…以及許許多多親愛的同 學好友們,謝謝你們容忍偶爾亂發神經的我。 同時也要感謝成大的各位精神支柱們,yoyo 學姊、tt 學長、琪玉百賢小倆口, 各位學長姐於求學期間熱心與耐心的給予協助;偉銘為提供相關資料的情報站; 阿宏細心的照護與鼓勵。 最感謝的仍舊是家人,感謝你們的支持與相挺、感謝你們的體諒與付出,沒 有家人的守護與我的任性,就不會有現在的自己,謝謝!以及默默在背後替我扛 起一切的彥斐,感謝你對我的付出與包容,使我有安心與向前進的動力,謝謝!. 珮珊 謹記 于交通運輸研究所碩二 lab 中華民國九十八年七月. IV.
(7) 目. 錄. 摘要................................................................................................................................ I Abstract ......................................................................................................................... II 誌謝..............................................................................................................................IV 目. 錄........................................................................................................................... V . 表目錄........................................................................................................................ VII 圖目錄....................................................................................................................... VIII 第一章. 緒論................................................................................................................ 1 . 1.1 研究背景......................................................................................................... 1 1.2 研究目的......................................................................................................... 2 1.3 研究流程與內容............................................................................................. 2 第二章. 文獻回顧........................................................................................................ 5 . 2.1 2.2 2.3 2.4. 靜態旅次起迄推估模式................................................................................. 5 動態旅次起迄推估模式................................................................................. 9 格位傳送模式............................................................................................... 15 小結............................................................................................................... 19 . 第三章. 模式架構建立.............................................................................................. 20 . 3.1 OD 推估模式 ................................................................................................. 20 3.2 卡門濾波模式................................................................................................ 22 3.3 CTM 模式應用 .............................................................................................. 25 3.4 OD 推估模式與 CTM 之系統架構 .............................................................. 30 第四章 簡例驗證與敏感度分析................................................................................ 32 4.1 簡例驗證....................................................................................................... 32 4.2 敏感度分析................................................................................................... 40 4.2.1 不同交通流量之敏感度測試............................................................ 40 4.2.2 不同交流道佈設方式........................................................................ 42 第五章. 實例應用...................................................................................................... 46 . 5.1 路網與資料說明........................................................................................... 46 5.2 實際路網推估結果....................................................................................... 48 5.3 大型實際路網-台中至台北交流道............................................................ 50 . V.
(8) 第六章. 結論與建議.................................................................................................. 52 . 6.1 結論............................................................................................................... 52 6.2 建議............................................................................................................... 53 參考文獻...................................................................................................................... 54 . VI.
(9) 表目錄 表 1 靜態文獻彙整表................................................................................................... 7 表 2 指派矩陣模式之文獻彙整表............................................................................. 11 表 3 非指派矩陣模式之文獻彙整表......................................................................... 13 表 4 CTM 模式之文獻彙整表 .................................................................................... 17 表 5 實際值與不同初始值設定推估結果比較表..................................................... 37 表 6 實際值與不同交通流量推估結果比較表......................................................... 41 表 7 不同交流道設計之績效值................................................................................. 44 表 8 實際值與推估值績效值..................................................................................... 49 表 9 路網格位對照表................................................................................................. 51. VII.
(10) 圖目錄 圖 1 研究流程圖........................................................................................................... 4 圖 2 高速公路路段示意圖......................................................................................... 20 圖 3 卡門濾波狀態變數推估演算示意圖................................................................. 22 圖 4 格位傳送模式流率及密度關係圖..................................................................... 26 圖 5 CTM 模式預測車輛到達型態之格位示意圖 .................................................... 27 圖 7 不同交通流量下車隊到達型態......................................................................... 29 圖 7 研究架構圖......................................................................................................... 30 圖 8 整體演算流程圖................................................................................................. 31 圖 9 小型封閉式路網示意圖..................................................................................... 32 圖 10 常態分配之車輛需求....................................................................................... 33 圖 11 三種初始值設定所推估之 b17 ........................................................................ 36 圖 12 k=264 時 b18 的遞迴收斂情形 ........................................................................ 36 圖 13 路段流量關係圖............................................................................................... 38 圖 14 以 Greenshieds 模式所估算的每個 OD pair 之車輛到達型態 ...................... 38 圖 15 應用 Greenshields 模式之推估結果 ................................................................ 39 圖 16 不同交通流量推估結果................................................................................... 40 圖 17 不同交流道佈設方式....................................................................................... 42 圖 18 不同佈設方式之 b1,14 推估結果.................................................................... 43 圖 19 不同佈設方式之 b17,20 推估結果.................................................................. 43 圖 20 不同佈設方式之 b19,14 推估結果.................................................................. 44 圖 21 楊梅至泰山收費站路網圖與格位對應圖....................................................... 46 圖 22 楊梅至泰山全日旅運需求量調查結果........................................................... 47 圖 23 偵測器每小時佔全日路段流量之比例........................................................... 47 圖 24 b27(k)推估結果與實際值之比較 ..................................................................... 48 圖 25 部份起迄對之到達型態分佈圖....................................................................... 48 圖 26 國道 1 號台中-台北交流道位置圖............................................................... 50 圖 27 k=896 時 b1,38 的遞迴收斂情形 ..................................................................... 51. VIII.
(11) 第一章 緒論 1.1 研究背景 起迄旅次矩陣(Origin-Destination, OD)推估對運輸規劃而言是相當重要的課 題,若能有效且正確地推估 OD 矩陣,提供交通管理單位規劃及策略研擬,必能 大幅提升路網績效。近年來伴隨著智慧型運輸系統(Intelligent Transportation Systems, ITS)的蓬勃發展,能方便加入更多及時資訊,使得推估的結果更為精 確,因此,動態起迄旅次矩陣推估已逐漸被大家所重視,而傳統上的 OD 流量矩 陣是只考慮一個特定的時間,推估的 OD 矩陣係利用該時段的平均交通流量而 得,大部分靜態的文獻當中,都依賴歷史 OD 資訊或是假設特定駕駛行為規則來 產生合理的推估結果。 基此,為了將 OD 推估的方法擴展到動態的環境下,部分的學者使用時間序 列的交通流量來建立之間的關係,以早期的 Nihan and Davis (1987) 和 Cremer and Keller (1987) 為代表,主要係根據預測誤差最小化的方法,建立一系列路口或小 路網的 OD 推估模式。此外,透過交通流量模化的 OD 推估系統方程式,一般而 言其準確性不易被接受,乃是由於系統的方程式通常遠少於成對起迄點(OD pair)的數量,因此,所有靜態方法的文獻當中都會利用一些歷史矩陣或是假設 某分配以獲得單一解;而大部分的動態方法,均引入時間序列的交通流量而設定 更多的限制式,使得系統方程增添明確性,同時透過遞迴或非遞迴系統求解技術 以獲得單一 OD 矩陣。 然值得注意的是,不論是靜態或是動態的推估方法,OD 矩陣與交通流量之 間的關係必須是給定或是部份已知的,在此關係下,靜態部分的應用,主要係用 來作為一般路網的規劃,該 OD 與路段流量之間的關係透過靜態交通指派模式而 建立;而近期發展之大部分動態方法與應用,均受限於小型路網或獨立路口,最 主要的原因是依時性的 OD 與路段流量之間的關係難以建立,同時旅行時間對模 式而言僅假設為一常數,然就實際的路網而言,穿越路網的每個成對起迄點之旅 行時間應該是依時性的,故依此方式很難產生可令人接受的結果,特別是在交通 飽和和事故發生所造成的擁擠路網下。而高速公路路網中,存在些許獨有的性 質,使其能提供有利用價值的資訊來推估動態 OD,例如:上下匝道能量守恆的 特性、良好的依時性流量估計,以及沒有複雜的路徑選擇問題,所以能有效發展 動態 OD 流量推估。 有鑑於此,本研究係以 Chang and Wu (1994) 所建立的動態起迄旅次推估模 式為基礎,並考量路網中旅行時間差異之獨特觀點,作本模式之延伸應用,以彌 補過往文獻中,動態起迄旅次矩陣推估模式之不足。此外,該模式在考量上游路 段與下游匝道時間差的研究上未屬完備,同時在推估旅行時間的方法亦不夠客 觀,因此本研究為改善其缺失,乃利用格位傳送模式(Cell-transmission model, CTM)模式來預測車輛到達型態,同時與動態起迄旅次矩陣推估模式相結合,並 1.
(12) 利用進階卡門濾波模式(Extended Kalman filter)來求解,依此建立遞迴預測型動態 起迄旅次矩陣推估模式。. 1.2 研究目的 本文依據 Chang and Wu (1994) 所建立的動態起迄旅次推估模式,考量了主 線道流量的資訊,以及旅行時間延滯等觀點,然而,其於推估旅行時間方法上較 為簡略,為此本研究進一步作出修正。因此,本研究主要目的如下: 1. 利用中觀車流理論中之格位傳送模式(CTM)預測車輛到達型態之功能,建立預 測型動態起迄旅次矩陣推估模式。 2. 利用運輸規劃軟體 DynaTAIWAN,作整體模式之驗證。 3. 並設計情境分析,針對不同車流型態與匝道佈設方式等分別觀察其對推估模 式之影響。. 1.3 研究流程與內容 本研究內容包含以下幾個部份,並如圖 1 所示: 1. 研究目的與範圍確定 確認研究課題與目的,並以此為依據往下進行研究。 2. 文獻回顧 分別對靜態與動態起迄旅次矩陣推估模式進行探討,瞭解過去所發展不同的 推估模式,從中觀察演化的趨勢與方向。另外,亦回顧有關格位傳送模式(CTM) 的文獻,俾瞭解其發展的過程與應用的層面。 3. 研究內容與架構建立 本研究主要分為兩大模式,一為旅次矩陣推估模式,係用卡門濾波進行推 估;另一為預測車輛到達型態,以格位傳送模式(CTM)建立模式。 4. 模式驗證 整體的模式必須透過運輸規劃軟體 DynaTAIWAN 來作驗證,而 VD 資料僅 能用來作為 CTM 模式之驗證。 5. 簡例驗證 為驗證本模式及求解演算法之可用性,以及與各參數設定之影響,依此設計 不同簡單路網來進行求解與分析。. 2.
(13) 6. 情境分析 分別測試在自由車流與擁擠車流的情況下,對 OD 推估結果的影響並進行分 析。 7. 實例應用 為驗證本模式及求解演算法之可用性與求解規模限制,進一步應用於國內高 速公路路網,期能瞭解本模式求解之效率與正確性。 8. 結論與建議 最後針對本模式的限制與求解的結果進行說明並提出後續研究之建議。. 3.
(14) 研究目的與範圍確定. 文獻彙析 靜態起迄旅次 矩陣推估模式. 動態起迄旅次 矩陣推估模式. 格位轉送模式(CTM). 模式架構建立. 進階卡門 濾波. 旅次矩陣推估模式. 格位傳送模式. 預測車輛到達型態. 模式驗證. 簡例驗證. 情境分析. 實例應用. 結論與建議. 圖 1 研究流程圖. 4. 運輸規劃 模式驗證.
(15) 第二章 文獻回顧 起迄旅次矩陣推估分成靜態與動態 OD 推估,兩者的差別是,靜態 OD 推估 是不依時間變化而改變的,且分析的時間都只在單一時間區間內,旅行時間與參 數也都假設為固定常數;而動態 OD 推估會依時間變化而變化,也可能會是多個 時區,旅行時間與參數也會依時變動。因此,本章分為靜態與動態旅次起迄推估 模式,以及回顧格位傳送模式的文獻。. 2.1 靜態旅次起迄推估模式 靜態 OD 推估大致上可以分成以下三類,首先是以運輸規劃為基礎,透過最 小化資訊(minimum information)或極大熵(entropy maximizing)模式的方法,主要 是因為路段上提供的交通量資訊是不足以決定單一 OD 矩陣,俾盡可能的選擇最 小化資訊的 OD 矩陣,因此只要能在歷史 OD 矩陣中增加些許資訊即可;第二類 為統計推論方法,例如:最大概似法(Maximum Likelihood)、一般化最小平方法 (Generalized Least Squares)以及貝氏推論法(Bayesian Inference),這類型的方法皆 假設交通流量和目標 OD 矩陣皆由部分機率分配所產生;最後為梯度導向方法 (Gradient based solution techniques),此法用來求解交通指派模式導向或是統計推 論方法的最佳化問題,這也是一個相當重要的模式,因為其能提供有效率的解, 並能應用於大規模的均衡指派推估問題。 1. 以交通指派模式為基礎之方法 Fisk(1988)合併 Van Zuylen and Willumsen(1980)的極大熵模式與使用者均衡 指派過程,並構建雙層數學規劃模式進行旅次矩陣推估;之後 Van Vliet(1982)將 使用者均衡指派改用變分不等式來模化。隔年 1989 年 Fisk 以擁擠路網的路段流 量來推估旅次矩陣,試圖驗證三個擁擠路網 OD 矩陣推估的模式,首先是根據 Jörnsten and Nguyen(1979) 極大熵模式來產生推估流量,其次係延伸 1988 年的 模式並應用在擁擠路網上,最後是合併旅次分佈與指派模式,如 Erlander et al. (1979)。上述的模式都是根據均衡指派的原則,然而該模式的缺點為缺乏明確的 應用實例與有效求解的技巧。 Jörnsten and Nguyen(1979)用雙層規劃模式,下層為均衡指派,上層為極大 熵問題,並作了三個假設:觀測的路段流量一致、皆為使用者均衡指派型式,以 及所有路段流量皆為可得。也於 1983 年根據之前的模式發展出一系列用雙層規 劃模式來求解 OD 矩陣推估問題,並能應用於大規模的路網。 Van Zuylen and Willumsen(1980)係根據最小化資訊與極大熵原則所構建的模 式,假設指派矩陣為比例指派,透過演算法不斷地遞迴調整,並且給定一初始的 OD 矩陣,利用最大概似法來解決觀測流量不一致的問題,並產生更好的推估路 段流量,然而實測的結果不盡理想,因此作者建議需有更佳的先驗資訊及歷史 5.
(16) OD 矩陣就能明確的改善其結果。 以上回顧的文獻均有共通的特點,皆需假設指派模式,大部分為均衡指派或 是比例指派模式。 2. 統計推論方法 Spiess(1987) 假設目標矩陣中的所有成對起迄點(OD pair)之元素為卜瓦松 變數(Poisson variables),用最大概似法來校估隨機變數的平均值,同時產生觀測 的交通量,並假設指派模式為比例指派,發展一收斂演算法”cyclic coordinate descent”。再則,此篇也研究了雙重限制模式以及觀測流量不必與推估旅次矩陣 的流量相等之狀況。其中有一重要的問題需要注意:進階模式(即觀測路段的流 量不一定要相等於推估的路段流量)的誘導需要仰賴路段流量互相獨立的假設, 意思是觀測的路段流量必須發生在不同的時間點,否則旅運者的旅次可能會被重 複計算,且模式只能簡化成近似最大概似法。此篇的優點在於推估旅次矩陣的可 能性,當極大熵模式於旅次矩陣元素為零時不可行,而最大概似法皆為可行。 Bell(1991) 用受限一般化最小平方法(Constrained generalized least squares)來 推估 OD 矩陣,路徑選擇是假設遵從比例指派的過程,優點為最佳化過程明確地 考慮了非負限制條件,結果顯示能有改進正確的推估矩陣。 Yang et al. (1992) 將 OD 推估模化成雙層問題,上層為一般化最小平方法, 用來求解目標函數,下層假設為使用者均衡指派,特色是觀測路段流量不需內部 一致也不用均衡模式,與其他均衡模式相比,如 Nguyen(1977) 和 Fisk(1988), 主要的相異處為,觀測路段流量被視為隨機變數的觀測值,以及當成上層目標式 的一部份,而不是當成被滿足的限制式。然而求解雙成規劃問題是很困難的,由 於雙層規劃問題下層的解會影響到上層的最佳解,因此也發展出一套起始解,使 用比例指派的方法先求解下層再求解上層,經過遞迴的求解過程而得最佳解。這 種方法也可解釋為梯度導向方法,衡量推估 OD 矩陣的統計誤差,顯示其改善推 估結果的程度,且內部變異小之高交通量路段能更有顯著的改善效果。該作者亦 於 1994 年將模式改為使用者均衡模式,以及假設所有路段的流量皆為可得的情 況下,產生和更新 OD 矩陣的過程成為不確定系統的線性方程。其中問題的界定 為觀測的路段流量是否為使用者均衡的型式。然 OD 矩陣是複雜的方程式系統, 仍可透過一般化最小平方法或是極大熵模式來求解,而且其他的 OD 推估模式都 不曾利用雙層結構來表示並求解擁擠路網的問題。 Maher(1983) 用貝氏統計法透過觀測路段流量來推估旅次矩陣,作了以下三 個假設:歷史 OD 矩陣與觀測流量遵從 multivariate normal (MVN) distributions、 路徑選擇為比例指派,以及所有路段的交通量為可得,因此推估 OD 矩陣會呈現 MVN distributed,優點為歷史 OD 矩陣與觀測流量都允許有不同的變異,並表示 成變異-共變異矩陣。透過遞迴求解的方式來更新 OD 矩陣以及相關的擴散矩陣。 3. 梯度導向求解技術 6.
(17) Spiess(1990) 以梯度方法來處理 OD 矩陣調整的問題。建構雙層模式,其中 上層為最陡下降法,下層為均衡指派。1992 年 Drissi-Kaïtouni and Lundgren 也考 慮過相同的問題。此模式能應用到最大為 469 個交通分區和 12476 條節線的路 網,推估的結果顯示該模式具有相當程度的有效性。 靜態文獻整理彙整如表 1 所示。 作者、年代. 方法. 表 1 靜態文獻彙整表 特性. 1. 以交通指派模式為基礎之方法 Fisk(1988). 極大熵模式. 利用極大熵模式與使用者均衡指派,構建 雙層數學規劃模式進行旅次矩陣推估。. Fisk(1989). 極大熵模式. 以擁擠路網的路段流量來推估旅次矩 陣,試圖驗證三個擁擠路網 OD 矩陣推估 的模式。缺點為缺乏明確的應用實例與有 效求解的技巧。. Jörnsten and Nguyen(1979). 極大熵模式. 用雙層規劃模式,下層為均衡指派,上層 為極大熵問題,並假設觀測的路段流量為 一致且為使用者均衡指派型式,以及所有 路段流量皆為可得。. Jörnsten and Nguyen(1983). 極大熵模式. 延伸 1979 年的研究,並應用於大規模的 路網。. Van Zuylen and Willumsen(1980). 最小化資訊與. 假設指派矩陣為比例指派,給定一初始的. 極大熵模式. OD 矩陣,利用最大概似法來解決觀測流 量不一致的問題。. 7.
(18) 作者、年代. 表 1 靜態文獻彙整表(續) 方法 特性. 2. 統計推論方法 Spiess(1987). 最大概似法. 假設目標矩陣中的所有 OD 對之元素為卜 瓦松變數(Poisson variables),並假設為比 例指派,發展一收斂演算法”cyclic coordinate descent”。. Bell(1991). 受限一般化最 小平方法. 路徑選擇是假設遵從比例指派的過程,最 佳化過程明確地考慮了非負限制條件,結 果顯示能有改進正確的推估矩陣。. Yang et al. (1992). 一般化最小平 方法. 用雙層問題,上層為一般化最小平方法用 來求解目標函數,下層為使用者均衡指 派,特色是觀測路段流量被視為隨機變數 的觀測值以及當成上層目標式的一部 份,而不是當成被滿足的限制式。. Yang et al. (1994). 一般化最小平 方法、極大熵 模式. 用不確定系統的線性方程來產生和更新 OD 矩陣。特色是其他的推估模式都沒有 用雙層結構來表示並求解擁擠路網的問 題。. Maher(1983). 貝氏統計法. 作了三個假設,因此推估 OD 矩陣會呈現 MVN distributed。優點為歷史 OD 矩陣與 觀測流量都允許有不同的變異。透過遞迴 求解的方式來更新 OD 矩陣以及相關的擴 散矩陣。. 3. 梯度導向求解技術 Spiess(1990). 最陡下降法. 以梯度方法來處理 OD 矩陣調整的問題。 建構雙層模式,其中上層為最陡下降法, 下層為均衡指派。. 資料來源:本研究整理。. 8.
(19) 2.2 動態旅次起迄推估模式 近期針對動態 OD 推估可以分成兩大類,指派(assignment-based)與非指派 (non-assignment-based)方法。指派方法乃假設有先驗之真實依時 OD 並且獲得準 確的動態交通指派模式,考慮取得真實之先驗依時 OD 資訊之困難度,部分研究 已發展出許多推估方法,係僅利用可獲得之時間序列交通量,減少了對先驗依時 OD 與動態交通指派模式之依賴。 根據 Chang and Tao (1999) 把此兩大類方法整理成一般化關係式,分別如下 所示: 1. 指派矩陣模式(Assignment-based) Z l (k ) = ∑∑ θlm (k ) Br (k − m) ............................................................................ (1) m. r. 其中, Br(k):時段 k 中,第 r 對 OD 的流量; Zl(k):時段 k 中,路段 l 偵測器所測得之流量; θilm(k):路段流量中分配在時段 k-m 中產生流量的比例。 2. 非指派矩陣模式(Non-assignment-based) 利用可得的輸入/輸出流量來建立動態 OD 與流量之間的關係,如下所示: M. I. y j (k ) = ∑∑ ρijm (k )bij (k − m)qi (k − m). j = 1,..., J ......................................(2). m = 0 i =1. 其中,. yj(k):時段 k 中,到達迄點 j 的旅次數; bij(k):時段 k 中,qi(k)往迄點的比例; qi(k):時段 k 中,由起點產生的旅次數; ρijm(k):時段 k 中,qi(k) bij(k)到達迄點 j 的比例。. 以下為指派與非指派矩陣模式之個別應用文獻:. 2.2.1 指派矩陣模式 Ashok and Ben-Akiva (1996) 建立離線和即時性推估與預測模式。離線模式 是給定數個連續時段的歷史 OD 流量與路段交通流量,使用一般最小化平方法進 行推估與更新 OD 流量資料;即時模式是給定某時段的歷史 OD 流量與路段交通 流量,推估該時段的初始 OD 矩陣,並進行未來 OD 矩陣預測,透過狀態-空間 模式遞迴演算,並使用進階卡門濾波推估之。2000 年透過即時推估和預測依時 9.
(20) 性的 OD 流量之誤差方法來建立兩種「狀態-空間」模型。第一種方法是定義 OD 流量誤差的狀態變數,第二種方法是定義起點出發比例和迄點到達分配的誤 差之狀態變數,並使用延伸廣義卡門濾波法來處理動態系統推估。2002 年使用 離線及即時兩種模式推估 OD 問題,以離線模式之結果作為即時模式之歷史資 料。其中離線模式是以 Cascetta (1993) 延伸靜態推估為方式,即時模式是延伸 Ashok and Ben-Akiva (2000) 中的廣義卡門濾波法。. Willumsen(1984) 用極大熵模式來建立路網模擬模式,並利用啟發式解法來 求解依時性的旅次矩陣,其中目標式是最小化資訊型態,指派矩陣會依據時間變 化而改變,如此ㄧ來,變數的數量就會跟著增加,故 Willumsen 發展出啟發式解 法來處理相關的問題,但該模式仍受限於離線的應用,且需要難以取得的歷史 OD 矩陣。 Suzuki 等人(2000) 透過路段交通量、瞬時速率,以及離開匝道車輛數等資 訊,以類神經網路進行卡門濾波(Neural Kalman Filter, NKF)參數矩陣之校估,其 結果與迴歸卡門濾波(Regressive Kalman Filter, RKF)相較下,NKF 無論自由流或 擁擠之狀況下皆有不錯之表現,但若流量劇烈變動時可能會造成模式初期預測之 錯誤,而 NKF 模式之缺點乃在於學習過程中需要大量資料,且較為複雜與費時。 Kim 等人(2003) 以模擬方式獲得系統參數,透用歷史路段交通流量及旅次 起迄資料,應用於卡門濾波模式推估動態旅次起迄量,同時利用 Paramics 車流 模擬軟體進行模擬及計算系統參數,再將參數套入進階卡門濾波模式,其結果顯 示進階卡門濾波模式可獲得更合理之估計結果,而缺點是推估結果仍受限於車流 模擬之隨機性。 陳齊邦等人 (2004) 利用進階卡門濾波 (Extended Kalman filter) 模式結合 Suzuki(2000)等人所提出之旅行時間推估模式,再將量測參數矩陣視為一新增之 系統狀態變數,並進一步提出以自我迴歸差分模式加以處理,並根據量測參數矩 陣之假設,整合出 KFAR、KFARI,以及 EKF 等三種模式。 張琪玉等人(2007) 以 Ashok(1996)模式為基礎,探討一般路網以及混合車流 情況下之推估情形,並以具有國內交通特性模擬軟體 DynaTAIWAN 進行模擬, 藉由該模擬軟體探討不同車種以及機車流量增減對路網與推估結果造成的影響。 下表 2 為指派矩陣模式之文獻整理彙整表。. 10.
(21) 作者、年代. 表 2 指派矩陣模式之文獻彙整表 方法 特性. Ashok and Ben-Akiva (1996). 最小化平方法和 進階卡門濾波模 式(EKF). 建立離線和即時性推估與預測模式。離 線模式使用最小化平方法;即時模式透 過狀態-空間模式遞迴演算,並使用進階 卡門濾波推估。. Ashok and Ben-Akiva (2000). 廣義卡門濾波法. 用兩種方法來建立即時推估和預測依時 性的 OD 流量之誤差方法來建立「狀態空間」模型。. Ashok and Ben-Akiva (2002). 卡門濾波模式. 使用離線及即時兩種模式推估 OD 問 題。離線模式是以 Cascetta (1993) 延伸 靜態推估為方式,即時模式是延伸作者 2000 年中的廣義卡門濾波法。. Willumsen(1984). 極大熵模式. 發展出啟發式解法來處理相關的問題, 但該模式仍受限於離線的應用,且需要 難以取得的歷史 OD 矩陣。. Suzuki 等人(2000). 類神經網路卡門 濾波( NKF). 透過路段交通量、瞬時速率,以及離開 匝道車輛數等資訊,進行參數矩陣校 估。缺點為學習過程中需要大量資料, 且較為複雜與費時。. Kim 等人(2003). 進階卡門濾波模 式(EKF). 利用 Paramics 車流模擬軟體進行模擬及 計算系統參數,再將參數套入進階卡門 濾波模式,其結果顯示進階卡門濾波模 式可獲得更合理之估計結果,而缺點是 推估結果仍受限於車流模擬之隨機性。. 陳齊邦等人(2004). 進階卡門濾波. 將量測參數矩陣視為一新增之系統狀態 變數,並進一步提出以自我迴歸差分模 式加以處理。. (EKF) 張琪玉等人(2007). 卡門濾波. 以 Ashok(1996)模式為基礎,探討一般路 網以及混合車流情況下之推估情形。. 資料來源:本研究整理。. 11.
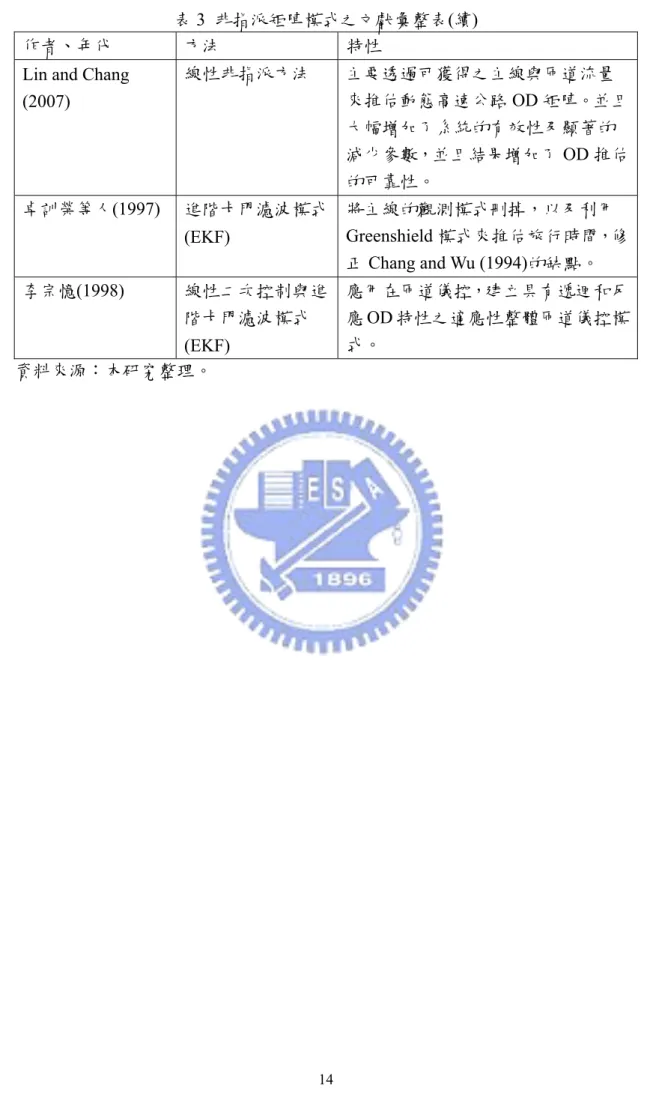
(22) 2.2.2 非指派矩陣模式 Chang and Wu (1994) 利用非線性巨觀車流關係取代 Bell (1991) 的車隊擴散 模式,建置一組新的路段流量限制式,並考慮路網擁擠(或平均旅行時間)對流量 到達型態的影響。主要的貢獻為不需要任何歷史 OD 資料,亦能在流量與 OD 之 間的關係中正確的掌握旅行時間變化的影響。1996 年,另外用一創新的動態推 估方法,即利用路段時間序列流量和 sceenline 流量來增加系統顯著性。主要概 念 係 依 照 界 線 劃 分 成 左 右 兩 邊 子 路 網 之 流 量 加 總 。 主 要 著 重 在 bij(k) 以 及 screenline 最佳的劃分數目與位置。主要模式也是參考 Bell (1991),包含了最小 平方法及卡門濾波法,但減少了一些參數並增加了限制式,減輕模式的負擔也提 升的運算效能。 Chang and Tao (1996) 進一步延伸 screenline 的概念至號誌化路網,並發展二 階段(Two-Stage)推估方法,應用在動態路網 OD 分配上。假設一封閉曲線與整體 路網交叉於一連串的路段場站,將路網分成兩個部份,以曲線區分內部及外部的 副網路,亦即「Cordon-line」的概念,如此一來,路網便被分割成數個子路網。 又 1999 提出二階段、非指派的方法,利用大範圍的一般都市路網中之轉向流量 資料,轉向流量資料不只是使用在子路網 OD 推估中,也在 DTA 模式中提供附 加的限制式在路徑流量資訊上,並應用卡門濾波法求解 OD 矩陣,與正規化方法 來解決求解過程中的不一致性。 Nihan and Davis (1989) 延伸 1981 年 Cremer and Keller 的方法,假設輸出流 量是以線性關係連續且多時性的進入流量,進行進出流量推測。另外,在限制式 中增加了旅行時間延滯的因素,以預測誤差與推估在 k 時段到達迄點的 OD 比 例,利用遞迴預測誤差最小化方法,產生多種遞迴和非遞迴方法進行多時性 OD 發展。此種動態推估法不需要初始 OD 資訊也不需要獲得動態指派模型。 Lin and Chang (2007) 根據線性非指派方法,主要透過可獲得之主線與匝道 流量來推估動態高速公路 OD 矩陣,其中線性非指派方法又有一關鍵性的問題為 旅行時間變化對依時 OD 的影響。模式並指出駕駛人從相同起點和相同時間間隔 離開速度不一致,是由於駕駛者期望速度或他們對交通擁擠的反應不同,再則, 該模式是經由嵌入旅行時間分佈函數來建立主線與匝道流量之相互關係。此關係 的建立大幅增加了系統的有效性及顯著的減少參數,並且增加了 OD 推估的可靠 性。用可衡量之主線與匝道時間序列流量來估計時間變化之高速公路 OD 分布, 該模式之速度分佈依駕駛人不同而異,並能有效減少大量的模式參數。 卓訓榮等人(1997) 就高速公路路網推估動態起迄旅次矩陣的模式而言,認 為 Chang and Wu (1994) 構建的模式最為可行,主要是因為該研究考慮了旅行時 間對流量到達型態的影響。但是 Chang and Wu 在模式建構上犯了兩個缺失,一 為模式中狀態變數 θijm (k ) 意義前後不一,仍將其視為同一變數進行求解;二為動 態旅行時間推估方法不恰當。因此,卓訓榮等人修正上述兩項缺點,將主線的觀. 12.
(23) 測模式刪掉,即能克服狀態變數前後意義不一致的情況,以及利用 Greenshield 模式來推估旅行時間,有效改善原本模式因路段流量推估過於粗略而使得誤差太 大之缺點。 李宗憶(1998) 同樣也以 Chang and Wu (1994)為基礎,將動態 OD 推估模式 應用在匝道儀控,引用動態 OD 推估方法,預測各時段進入匝道車輛的分配與離 開匝道的時間分佈,充分反應高速公路各匝道之間的 OD 特性。在高速公路車流 運行的動態系統模式中,採用 Payne(1971) 的波動方程式來描述,以誤差量最小 為目標,模化成線性二次控制問題。因此,結合動態 OD 推估技術與線性二次控 制理論,建立具有遞迴和反應 OD 特性之適應性整體匝道儀控模式。 表 3 為非指派矩陣模式之文獻整理彙整表。 作者、年代. 表 3 非指派矩陣模式之文獻彙整表 方法 特性. Chang and Wu (1994). 進階卡門濾波模式 利用非線性巨觀車流關係建置新的 路段流量限制式,考慮路網擁擠與平 (EKF) 均旅行時間對流量到達型態的影響。. Chang and Wu (1996). 最小平方法及卡門 利用路段時間序列流量和 sceenline 濾波法 流量來增加系統顯著性。同時也減少 了一些參數並增加了限制式,降低模 式的負擔也提升的運算效能。. Chang and Tao (1996). 卡門濾波法. 延伸 Screenline 的概念,並發展二階 段 (Two-Stage) 推估方法在動態路 網 OD 分配上,並提出「Cordon-line」 的概念。. Chang and Tao (1999). 卡門濾波法. 提出二階段、非指派的方法,利用大 範圍的一般都市路網中之轉向流量 資料。並應用卡門濾波法求解 OD 矩 陣,與常態方法解決求解過程中的不 一致性。. Nihan and Davis (1989). 卡門濾波法. 假設輸出流量是以線性關係連續且 多時性的進入流量,進行進出流量推 測。另外,在限制式中增加了旅行時 間延滯的因素,. 13.
(24) 作者、年代. 表 3 非指派矩陣模式之文獻彙整表(續) 方法 特性. Lin and Chang (2007). 線性非指派方法. 卓訓榮等人(1997). 進階卡門濾波模式 將主線的觀測模式刪掉,以及利用 Greenshield 模式來推估旅行時間,修 (EKF) 正 Chang and Wu (1994)的缺點。. 主要透過可獲得之主線與匝道流量 來推估動態高速公路 OD 矩陣。並且 大幅增加了系統的有效性及顯著的 減少參數,並且結果增加了 OD 推估 的可靠性。. 李宗憶(1998). 線性二次控制與進 應用在匝道儀控,建立具有遞迴和反 階卡門濾波模式 應 OD 特性之適應性整體匝道儀控模 式。 (EKF) 資料來源:本研究整理。. 14.
(25) 2.3 格位傳送模式 Daganzo(1994) 係以流體動力學的基本概念推導單一方向及單一出入口之 道路密度變化過程之模式。將高速公路分為許多路段,每個路段稱為格位 (Cell)。該模式大部分應用在預測時間及空間變化之交通發展,例如:擁塞車流 之消散等。亦顯示 CTM 模式如何模擬實際交通上壅塞情形之發展,其中衝擊波 為 CTM 模式在各格位上之密度自動產生的變化,但是消除衝擊波的傳遞計算過 程是相當複雜。隔年 1995 年發展於複雜路網下,能隨著時間變化來預測多樣性 交通車流,並以交通車流之簡易巨觀電腦模式來表現,且在所有交通狀況下都能 符合流體動力學理論。該研究假設隨時間變動之起迄矩陣與每個交叉點之轉向比 例都是已知的,上述的假設對於意外排除計畫的數值分析都是合理的。從結果延 伸的其它案例,如:轉向比例之代替、從每個交叉點已知下所有時間內到每一距 離之最佳路線。Daganzo 期望未來能引發更多高速公路車流之實際模式、意外排 除與動態交通指派模式。 Munoz et al. (2003) 提 出 一 個 轉 換 方 法 模 式 (Switching mode model, SMM) ,使用格位密度代替格位佔有率,允許 CTM 是非均一的格位長度且能以 較好的靈活性劃分高速公路區段。非均一的格位長度能夠使用較少的格位數來模 擬所設定的高速公路區段,因此能減少狀態向量的大小。SMM 是一種混合系統 (轉換線性系統),在線性差異方程式中的不同部分轉換,而這需要仰賴一個高速 公路區段中的主線資料與格位擁塞情形。在 SMM 中提出五種情境,並藉由這五 種情境得到顯著力與控制力的結果。藉由這個修改後的 CTM,能有效地避免在 轉換損失上所產生 CTM 的非線性問題。 Sun, Muñoz and Horowitz (2003) 利用 CTM 模式為基礎轉換狀態-空間模式 來估算公路路段中難以衡量位置之車輛密度和擁擠型態。根據序列 Monte Carlo 方法發展出混合卡門濾波演算法(Mixture Kalman filter algorithm),求解近似非觀 測之離散狀態的轉換狀態-空間模式。而推估的結果顯示即時 filtering 是可行且為 有效率的,且此模式的優點為推估的平均誤差達到 10%以下,且推估的結果與每 天變異的資料庫是相符合的。 Zhong and Sumalee (2007) 考慮交通需求與供給的變化不確定性,模擬了實 際高速公路系統的情形,因此延伸 CTM 之概念發展出隨機格位傳送模式 (Stochastic cell transmission model, SCTM),使用分析機率理論且闡述成隨機轉換 系統,目的是將此模式應用於大型高速公路路網之即時預測演算法和控制策略, 主要藉由動態不確定性來改變供給和需求以模擬隨機的交通路網。在模擬隨機的 供給及需求方面有些是屬於 log-normal 分配,而為了避免非線性和最少隨機變數 的運用,結合了 Munoz(2003) 所提出的 SMM 來作修改。從機率轉換情形中可得 到一個結論,就是擁塞-自由流(CF)模式和自由流-擁塞(FC)模式不能共存,並提 出六種情形之轉換法則,且以 log-normal 分配來模擬實際交通狀態。 15.
(26) Lo and Szeto (2002)根據動態使用者最佳化(DUO)的原則,建立 cell-based 的動態交通量指派(DTA)模式。透過適當的車間距函數與等義數學問題之轉換, 用以改善動態交通模式的正確率,而此函數之轉換亦將 CTM 模式的路網概念加 以應用。該文提出動態化交通量的觀點、流量在交叉路口的交互情況以及使用者 最佳化的原則下等情境用以評估此模式的特性。該文中模式所提出之結果與預期 之結果具有一致的情形,亦即本模式可以獲取動態交通量的現象,例如衝擊波之 發生與消散等情況,此外本模式亦有能力可以捕捉到車輛在交叉路口之分流情 況。同年,該作者再根據理想化的動態使用者最佳化中之變分不等式方法,建構 cell-based 的動態交通量指派模式。為了要改善動態交通量模式的正確性,該文 在模式上結合格位傳送模式(CTM) ,此外透過該模式,使得該文所提出之模式 亦能滿足先進先出(FIFO)的情況。在求解過程中,該文利用 alternating direction method 發展聯合強制變分不等式的問題。同時亦提出兩種情境評估此模式的特 性:動態交通量的範疇及理想化的使用這最佳化原則,結果顯示該文所提出的模 式有能力可以獲取動態的情形,例如衝擊波的發生以及等候的形成與消散,此外 實驗的結果亦可以說明該文所提出的模式精確的服從 DUO 的原則。 Chow and Lo (2007)提出一新式的敏感性分析技術,用以分析號誌化路口 號誌控制的一般性延滯。本文首先推導一系列的延滯模式並衍生出號誌控制的關 係元素,此篇的貢獻是要明確的將號誌控制所引起的一般性延滯加以考慮,包含 向後擴散及路段封鎖的情形,接續更進一步的推導 CTM 模式,用以完成前述之 問題。在實力應用部分,本文利用啟發式演算法進行動態交通號誌控制,結果顯 示結合基因演算法與 Frank-wolfe 求解 CTM 之號誌化控制確實較僅用僅用演算 法有較長之綠燈寬帶;同時以 CTM 模擬路口車輛運行部分,模擬資料與實際觀 測資料最多也僅有 14.28%之誤差。 Gomes and Horowize (2006)提出非對稱的格位傳送模式(ACTM)處理 高速公路匝道儀控的問題,該模式不僅能獲取自由流率及擁塞情形的車流情形, 更能推估匝道儀控率的上限,同時亦能推算匝道等候車輛之長度。同時該文提 出,在某一情況下,可以藉由求解單一線性規劃問題的近似全域解方法,處理非 線性最佳化的問題。本文的最大的假設,就是在最佳化儀控率執行的時候,主線 上的擁擠車流不會回堵至匝道上,至於本文測試之實際資料是由南加州的一完全 擁塞的延伸高速公路而來,測試與模擬之結果顯示,利用本文所提出之 ACTM 模式所進行的儀控方法,可以減少 17.3%的延滯情形。 Boel and Mihaylova(2006)提及高速公路的交通流量因為車輛與車輛間的 複雜交互作用情況,故是一個非線性的情形,故提出以適當時階為依據的即時估 計方法,建立路徑預測與匝道儀控的隨機模式。高速公路的路網型態則依據 1995 年 Daganzo 的 CTM 模式加以設定,並利用點當的隨機方程式,描述每一個格位 中巨觀的交通行為,因此該文所提出的模式可以藉由 links 的組成,模擬相當大 的道路路網。同時本模式利用 Belgian 高速公路的資料加以驗證。 16.
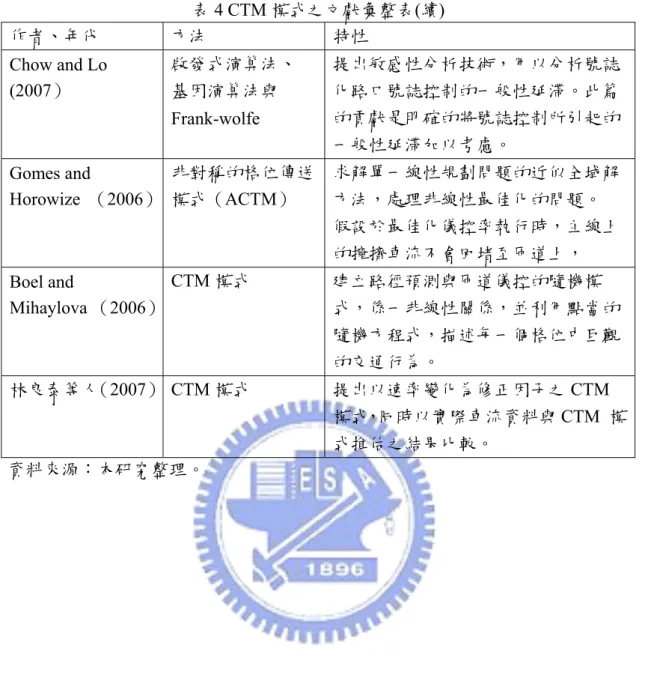
(27) 林良泰等人(民 96 年)首先採用國道 1 號北上路段中清至中港路段之偵測 器資料與格位傳送模式進行實例之驗證。接續以每五百公尺之車輛數為研究對 象,進行 CTM 模式推估,同時以實際車流資料與 CTM 模式推估之結果比較。 該文獻指出,因 CTM 模式未考量各格位間之速度變化因素,故該研究提出以速 率變化為修正因子之 CTM 模式,將原模式與實際資料進行驗證時,其平均絕對 誤差百分比(MAPE)之值由 14%至 35%提升為 13%至 31%。該文獻最後指出, 由實際驗證之結果顯示,CTM 模式整體推估之效果頗佳,同時並建議可將其應 用於國內高速公路車流狀態之推估。 表 4 為 CTM 模式之文獻整理彙整表。. 作者、年代. 表 4 CTM 模式之文獻彙整表 方法 特性. Daganzo(1994). CTM 模式. 用流體動力學基本概念構建道路密度 變化過程之模式,大部分用在預測時 間及空間變化之交通發展。. Daganzo(1995). CTM 模式. 發展於複雜路網下,能隨著時間變化 來預測多樣性交通車流,並假設隨時 間變動之起迄矩陣與每個交叉點之轉 向比例都是已知的。. Munoz et al. (2003). 轉換方法模式. 使用格位密度代替格位佔有率,允許 CTM 是非均一的格位長度,因此減少 狀態向量的大小。SMM 是一種混合系 統轉換在線性差異方程式中的不同部 分。. (SMM). Zhong and Sumalee 隨機格位傳送模式 使用分析機率理論且為闡述成隨機轉 換系統,藉由動態不確定性來改變供 (2007) (SCTM) 給和需求以模擬隨機的交通路網。 Sun et al. (2003). CTM 模式為基 求解近似一非觀測的離散狀態的轉換 礎,加上 狀態-空間模式。優點為達到推估的平 混合卡門濾波演算 均誤差在 10%以下。 法(MKFA)來轉換 狀態-空間模式. Lo and Szeto (2002). cell-based 的 DTA 模式. Lo and Szeto (2002). alternating direction 滿足先進先出(FIFO)原則,同時提 method、變分不等 出兩種情境評估此模式的特性。 式方法. 透過適當的車間距函數與等義數學問 題之轉換,用以改善動態交通模式的 正確率。. 17.
(28) 作者、年代. 表 4 CTM 模式之文獻彙整表(續) 方法 特性. Chow and Lo (2007). 啟發式演算法、 基因演算法與. 提出敏感性分析技術,用以分析號誌 化路口號誌控制的一般性延滯。此篇 的貢獻是明確的將號誌控制所引起的 一般性延滯加以考慮。. Frank-wolfe. 非對稱的格位傳送 求解單一線性規劃問題的近似全域解 Gomes and Horowize (2006) 模式(ACTM) 方法,處理非線性最佳化的問題。 假設於最佳化儀控率執行時,主線上 的擁擠車流不會回堵至匝道上,. CTM 模式 Boel and Mihaylova (2006). 建立路徑預測與匝道儀控的隨機模 式,係一非線性關係,並利用點當的 隨機方程式,描述每一個格位中巨觀 的交通行為。. 林良泰等人(2007) CTM 模式. 提出以速率變化為修正因子之 CTM 模式,同時以實際車流資料與 CTM 模 式推估之結果比較。. 資料來源:本研究整理。. 18.
(29) 2.4 小結 本研究礙於真實的歷史 OD 矩陣難以取得的限制,僅以時間序列之交通量來 進行動態起迄旅次矩陣推估,藉此減少對先驗依時 OD 與動態交通指派模式之依 賴。因此,本研究以非指派模式為推估演算基礎,從上述回顧之文獻中又以學者 Chang 作過一系列較為連貫的研究。 而該系列的研究中,1994 年利用非線性巨觀車流關係建置新的路段流量限 制式,考慮路網擁擠與平均旅行時間對流量到達型態的影響,然而,為改善未知 變數隨研究範疇增加導致運算效率不彰,故改以巨觀觀點,假設進入高速公路車 輛之旅行時間前後差異不大,侷限在某範圍內。2005 年更進一步假設車輛旅行 時間呈現某種分配來反應不同駕駛者對道路擁擠情況的駕駛行為。2007 年改以 ㄧ累積密度函數來計算旅行時間。. Chang 作一系列非指派矩陣推估的研究,均以 1994 年的模式為發展基礎, 不斷的改進旅行時間不客觀的推估方法,從假設相差不超過 2 個時間區間內到旅 行時間呈現某種分配,都是用強烈的假設條件來限制路網上車輛的消散行為,忽 略了實際上駕駛者面對不同的交通擁擠狀況所作出不同的反應行為。此外,上述 提及之研究皆包含大量的狀態變數以及相關的參數,造成模式複雜度大幅提升。 因此,本研究係以 Chang 最早建立之動態起迄矩陣推估模式為建構基礎, 又為能更符合真實的車流運行狀況,加入了 CTM 模式進而取代了上述針對旅行 時間推估所作的假設,期能客觀且正確的預測車輛的到達型態,有助於動態起迄 旅次矩陣推估。. 19.
(30) 第三章 模式架構建立 本章節主要針對模式架構作介紹,首先於 3.1 節介紹 Chang and Wu (1994) 推估 OD 矩陣模式以及本模式修正該推估模式不完善之處;3.2 節介紹卡門濾波 演算法;3.3 節為 CTM 模式應用與不同交通流量下車輛消散的情形;最後 3.4 節 建立 OD 推估與 CTM 之系統架構與演算流程。. 3.1 OD 推估模式 本研究的 OD 矩陣推估模式主要是採用 Chang and Wu (1994) 當中的模式, 考慮一高速公路路段,如下圖 2 所示,假設每個路段只有一對上下匝道(除了開 始與結束的路段),路網由 N 個路段、N+1 個節點和 N 個節線所組成。以下是符 號說明:. 圖 2 高速公路路段示意圖. q0(k):於時段 k 內由上游節點進入高速公路之車輛數; qi(k):於時段 k 內從交流道 i 進入高速公路之車輛數,i=1,2, ...,N-1; yj(k):於時段 k 內從交流道 j 離開高速公路之車輛數,j=1,2,...,N-1; yn(k):於時段 k 內到達下游節點之主線道流量; Tij(k):於時段 k 內從交流道 i 進入高速公路,而從交流道 j 離開高速公路之 車輛數, 0 ≤ i < j ≤ N ;. bij(k):Tij(k) / qi(k); Ul(k):於時段 k 內通過路段 l 起始線之車輛數; U l' (k ) :於時段 k 內通過路段 l 終止線之車輛數。 該模式欲求解的是:如何從觀測之依時的上匝道車輛數 qi(k)、下匝道車輛數 yj(k)以及主線車輛數 Ul(k),來推估隨時間變化的動態起迄 Tij(k)或 bij(k)。 根據上述定義顯然有以下關係存在: qi (k ) =. N. ∑ T (k ) ,. j =i +1. ij. i = 0,1,..., N − 1 ..................................................................(1). 20.
(31) Tij (k ) = qi (k )bij (k ) , 0 ≤ i < j ≤ N ....................................................................(2) 0 ≤ bij (k ) ≤ 1 , 0 ≤ i < j ≤ N ..............................................................................(3) N. ∑ b (k ) = 1 ,. j = i +1. ij. i = 0,1,..., N − 1 ...........................................................................(4). 然而,每個駕駛人之間的速率變化都不盡相同,因此假設時段 k 從交流道 i 到交流道 j 抵達時間的分佈可能為時段 k,k+1,…,k+M,M 表示為車輛通過 完整的區段所需的最大時間區間。因此為考量駕駛人速度不同造成旅行時間不同 之因素,Chang(1994)加入了一變數 θijm (k ) 來反應旅行時間不同對推估結果的影 響,而在本研究中則是採用參數 ρijm (k ) 來預測車輛到達型態,其定義如下:. ρijm (k ) :於(k-m)時段內產生的 Tij(k-m)中,經過 m 個時段後在時段 k 到達交 流道 j 之車輛數佔 Tij(k-m)的比例。 0 ≤ ρijm (k ) ≤ 1 , 0 ≤ i < j ≤ N , m = 0,1,..., M ..................................................(5) M. ∑ρ. m=0. m ij. (k ) = 1 ......................................................................................................(6). 因此,考慮此參數後,下匝道的車輛數 yj(k)可改寫如式(7)所示,該式充份 的表現出 OD patterns 與路段流量之間的動態關係: M. j −1. y j (k ) = ∑∑ Tij (k − m) ⋅ ρijm (k ) m=0 i =0 M. j −1. = ∑∑ qi (k − m) ⋅ bij (k − m) ⋅ ρ (k ) , j = 1, 2,..., N. ...............................(7). m ij. m=0 i =0. 式(8)為主線道車輛數之關係式,該式亦須符合流量守恆之限制,並可增加 模式推估之顯著性: M l −1 ⎡ N ⎤ U l (k ) = ∑∑ ρilm (k ) ⎢ ∑ Tij (k − m) ⎥ + q1 (k ) m =0 i =0 ⎣ j =l +1 ⎦ M. l −1. U l (k ) − q1 (k ) = ∑∑. ...............(8). N. ∑ q (k − m)b (k − m)ρ. m = 0 i = 0 j =l +1. i. ij. m il. (k ) , l = 1, 2,..., N − 1. 然而,Chang and Wu (1994)的研究中,由於未知變數 bij(k)、 ρijm (k ) 會隨著 M 值增加而增加,需要更多的資訊或是簡化模式才能提高即時環境下的求解速率, 因此,為了改善運算效率,採用巨觀的觀點,假設進入高速公路的車輛速度在相 同時間區間內可被分配在某個範圍裡,也就是各車輛的旅行時間(tij(k))差異不會 太大,而是侷限在某一範圍內。 相較於該假設條件,本研究為能更符合真實的車流運行狀況,採用了 CTM 模式模擬真正的車流行為,藉以模擬路網中車輛之到達型態,進而取代旅行時間 相差不超過一個時段的假設。然而,在過去的文獻中,通常有考慮旅行時間的因 21.
(32) 素會視模式複雜度而有不同的假設,如:Lin and Chang (2005) 假設旅行時間呈 某種分配來代表不同駕駛者對道路擁擠情況作不同的反應;而在 Lin and Chang (2007) 中,根據 2005 年的假設進一步利用累積密度函數來計算旅行時間。不論 是用何種假設條件均無法確實的反應出車輛在路網中受到其他車輛干擾,導致不 同駕駛者速度變化對旅行時間的影響程度,因此,本模式以中觀車流模式 CTM 預測車輛到達型態,較巨觀模式更能檢視出車輛間旅行時間的差異,亦較微觀模 式更迅速的求解。. 3.2 卡門濾波模式 卡門濾波演算法係由 1960 Kalman, R.E.提出的,目前已經被廣泛的應用在各 個不同的領域,在運輸領域中最常被應用在推估旅次起迄量與車流密度以及匝道 儀控等課題。卡門濾波就是一個資料處理的最佳遞迴演算法 (optimal recursive data processing algorithm),係透過系統的噪音統計分配和測量誤差的不確定性, 以及任何可得的變數初始條件,來處理所有可得的衡量值並無視其精確度,用以 推估當期的變數值。 卡門濾波主要的概念是以遞迴方式來推估狀態變數,在給定 k 時段下,利用 狀態向量估計式來預測下一時段的狀態推估值 x-(k),並預測 k 時段的觀測值 zˆ(k ) ,即可透過預測之觀測值與實際觀測值之間的誤差來更新 x-(k),更新後的 狀態以 x+(k)表示之,隨後可利用 x+(k)再預測下一時段 k+1 的狀態 x-(k+1),繼續 往下遞迴演算及推估,計算程序如圖 3 所示。. zˆ(k ). Δz (k ). 圖 3 卡門濾波狀態變數推估演算示意圖 卡 門 濾 波 是 由 狀 態 方 程 式 (State equation) 和 量 測 方 程 式 (Measurement equation)所構成的,其中,狀態方程係由欲推估之變數所構成的關係式,而量測 方程則是反應出實際路段流量與狀態變數之間的相互關係。以本模式而言,狀態 變數便是(7)、(8)式中的 bij(k),而觀測值就是上匝道車輛數 yj(k)、下匝道車輛數 qi(k),以及主線道車輛數 Ul(k)所構成的關係式。因此,狀態變數 bij(k)通常假設 為隨機且獨立隨機漫步過程,可表示成如下的狀態方程式:. bij (k + 1) = bij (k ) + wij (k ) ....................................................................................(9). 22.
(33) 其中,. wij(k) : k 時 段 之 狀 態 模 式 的 白 噪 音 (white noise) , 且 E(wij(k))=0 , Var(wij(k))=D(k),並服從高斯分配(Gaussian distribution)。 D(k)=diag[Db,...,Db],為 N(N+1)/2 維度之 wij(k)的共變異矩陣。. 量測方程式則是由實際路段與主線道流量 yj(k)、qi(k)、Ul(k)的關係式所構 成,並表示為下式所示:. z '(k ) = H (k )b(k ) + e(k ) ...................................................................................(10) 其中, e(k)為 2N-1 維度的觀測誤差項,亦服從高斯分配(Gaussian distribution),且. E(e(k))=0,Var(e(k))=R(k)。 R(k)=diag[r1,...,r2N-1],為 2N-1 維度之 e(k)的共變異矩陣。 H(k) 為 (2N-1)*(N(N+1)/2) 的轉換矩陣,係 (7) 、 (8) 式中的相對應元素,且 H(k)= H k = [ H rsk ](2 N −1)*N ( N +1) / 2 , 其中, M. H kj , Ni + j −i (i +1) / 2 = ∑ qi (k − m) ρijm (k ) for 0 ≤ i < j ≤ N. [ H rsk ] =. m=0. M. H Nk +l , Ni + j −i ( i +1) / 2 = ∑ qi (k − m) ρilm (k ) for 0 ≤ i < l < j ≤ N m=0. 其他的矩陣元素均為 0。 以上為一常見的狀態空間系統(state-space model),然而該模式為非線性系 統,必須以進階卡門濾波(Extended Kalman Filtering, EKF)進行推估,以下是逐步 的演算流程:. 1. 初始化設定 X(0)=E[b(0)]N(N+1)/2*1 P(0)=Var[b(0)]N(N+1)/2* N(N+1)/2. 2. 遞迴步驟 step1. 呼叫 CTM 模式所預測出的到達型態 ρ ijm (k ) 。 step2. 計算矩陣:Hk、z’(k) 23.
(34) H k = [ H rsk ](2 N −1)*N ( N +1) / 2 M. H kj , Ni + j −i (i +1) / 2 = ∑ qi (k − m) ρijm (k ) for 0 ≤ i < j ≤ N m=0. M. H. k N + l , Ni + j − i ( i +1) / 2. = ∑ qi (k − m) ρilm (k ) for 0 ≤ i < l < j ≤ N m=0. ⎡ z1 ⎤ ⎢ z ⎥ Z '(k ) = ⎢ 2 ⎥ = [ y1 (k ),… , y N (k ), U1 (k ) − q1 (k ),…U N −1 (k ) − qN −1 ( k )]T ⎢ ⎥ ⎢ ⎥ ⎣ z2 N −1 ⎦. step3. 計算誤差共變數矩陣與卡門增益項 G(k): P − (k ) = Φ(k − 1) P + (k − 1)ΦT (k − 1) + D(k − 1) G(k ) = P − (k ) H T (k )[ H (k ) P − (k ) H T (k ) + R(k )]−1. step4. 更新狀態變數. x+ (k ) = x− (k ) + α ' G(k )[ z(k ) − H (k ) x− (k )] step5. 截平面(Truncation)與正規化(Normalization) 目的是為符合 OD 推估模式的限制式,因此透過截平面與正規化的方式使狀 態變數符合介於 0 到 1 之間,且加總為 1 的條件。. α ' = MAX ⎡⎣α | 0 ≤ ⎡⎣ x − (k ) ⎤⎦ + α G (k )[ z (k ) − H (k ) x − (k ) ≤ 1⎤⎦ 0 ≤α ≤1. For m = 1,..., N − 2. βm =. N. ∑. j = m +1. i xmj. i / βm x = xmj i mj. j = m + 1,..., N. step6. 重複上述步驟進行下個時階的 OD 推估。. 24.
(35) 3.3 CTM 模式應用 1. 模式描述 該模式係由 Daganzo 於 1994 年提出,用以預測車流在空間與時間上的流動 如車隊的形成與紓解等。模式假設有一均質(homogeneous)路段,且路段上並無 任何匝道可供車輛進出,故該路段上車輛僅能由一段進入路段內並由另一段離開 路段。將該道路分成數個同質性的格位(cell),從道路上游依序給予編號從 1 到 I, 每個格位長度會依照一般車輛在單位時間內所行走的距離而定,而該行走的距離 亦可由車輛在自由流的速率下推算而得。依照上述,車輛在自由流(free flow)的 情況下,可以隨著時間的推移前進至下一個格位內,不需要考量車輛在格位裡的 位置,其關係式如下:. ni (t + 1) = ni (t ). for t=0,1,2,…. 其中,ni(t)為時間 t 時在格位 i 的車輛數;. ni+1(t+1):時間 t+1 時,在格位 i+1 之車輛數。 上述情況發生在低交通流量時,亦即車輛能以自由流速率(free flow speed) 前進的情況下。當速率由於進入瓶頸路段而降低的時候,也就是道路出現車隊排 列時,模式則新增兩個變數 Ni(t)及 Qi(t),以模擬擁擠時所造成車流變化情況。 Ni(t)為各格位所能容納之最大車輛數,Qi(t)則表示格位所能通過之最大流量,因 此,可以定義單位時間 t 內可以進入 i 格位之車輛數 yi(t)為下式:. yi (t ) = min{ni -1 (t ),Qi (t ), N i (t ) - ni (t )} 第一個變數表示格位所能承受之最大密度,第二個變數表示格位所能通過之 最大流量,因此,Ni(t)- ni(t)為單位時間格位 i 車輛可以通過的空間。 根據以上關係,求得當有車隊發生時,格位傳送模式之關係,當時間在 t+1 時之車輛數為格位 i 在時間 t 時之車輛數,符合能量守恆之概念,t 時階中格位 i 之車輛數加上流入與減掉流出之車輛數,關係式如下:. ni (t + 1) = ni (t ) + yi (t ) - yi +1 (t ) CTM 模式則是根據上式不斷依時間變化而產生遞迴關係,因此可以透過遞 迴模式瞭解每一時階中,存在於某格位裡的車輛數。 透過上述,每個格位之特性(車輛數)都是與上一時階及格位的函數,這與 LWR 的流體模式之密度與流量有著相似的關係,此關係以一種等腰梯形具體化 的方式表示如圖 4,其關係式為:. 25.
(36) 流率,q. vkj/2. qmax v. O. -v. kA. kB. kj. 密度,k. 圖 4 格位傳送模式流率及密度關係圖 q = min{vk, qmax , v (k j - k )}. for 0 ≤ k ≤ k j. 其中,v:自由車流速率; k j :飽和密度; q max ≤. k jv 2. :最大流率。. 透過上述,當設定完成時階(clock tick)設定以及 cell 長度設定後,即可以 藉由道路上車流參數之訂定,獲得所需之資訊,包含:總通過車輛數、總延滯及 最大等候長度等。. 2. 預測車輛到達型態之應用 於 CTM 模式預測車輛到達型態運算概念如下圖 5 格位儲存示意之關係所 示,將路段切成數個 cell,假設起點為 cell i、迄點為 cell j,自 m 時段後開始下 匝道 j,由於每位駕駛者及路段旅行時間不一致的情況下,導致下匝道時段不一, 可能從 m, m+1, ..., M 時段,但是 cell i 通過 cell j 的車輛數必須再由完整的路段 車流狀況而定,非 cell i 至 cell j 之間自行決定的,因此,CTM 模式需要計算及 記錄每次且每個時段下匝道的車輛數,與流過該起迄點之 cell 的總車輛數所佔的 比例即為 ρijm 。 實際運算過程與格位中車輛的變化關係乃基於上述 CTM 基本概念,再依據 本研究之需求進一步擴展而成的。為能符合真實的車流運行行為,各駕駛人的駕 駛行為皆不盡相同,導致車輛行駛速度迥異,可能會造成路網中產生車隊排列等 候的情形,再加上 CTM 基本的概念只考慮直線路段,而本研究額外考慮了上下 匝道進出主線道的因素。因此主線與上下匝道之格位傳送模式之概念如下圖 5 所示,每個格位會再根據車輛的不同來源被分割成數個小格,各個小格位中分別 記錄了不同時段 m 與不同來源 qi 的車輛,這些車輛會依據路段的擁擠程度及格 位容量限制進行運算,若無發生車隊排列的情形,如自由車流,車輛旅行時間僅 可能為一兩個時段;然而,一旦發生了車隊排列,如擁擠車流,車輛的旅行時間 26.
(37) 便會依不同駕駛者作出的不同反應而有所增減,因此到達時間可能會分佈在 k+1,…,k+m 數個時段。. 圖 5 CTM 模式預測車輛到達型態之格位示意圖 下列式(11) 為本模式為考量上下匝道流量進出的影響所擴展的格位之車輛 傳遞關係式,當時間在 k+1 時之車輛數為格位 c 在時間 k 時之車輛數,加上流入 與流出的車輛數,關係式如下:. nc (k + 1) = (nc (k ) − Pc (k )) + Yc (k ) − yc +1 (k ) ......................................................(11) Yc (k ) = yc (k ) + rc (k ) 1 yc (k ) = min{nc −1 (k ), Qc (k ), [ N c (k ) − nc (k )]} 2 1 rc (k ) = min{qi (k ), Qc (k ), [ N c (k ) − nc (k )]} 2. ..............................................(12). 其中參數說明如下:. nc(k+1):時間 k+1 時格位 c 之車輛數; Pc(k):時間 k 下匝道的車輛數; Yc(k):時間 k 可以進入格位 c 之車輛數; yc(k):時間 k 欲進入格位 c 之主線車輛數; rc(k):時間 k 欲進入格位 c 之匝道車輛數。 以上為 CTM 基礎概念與本模式考量觀點下的格位傳送模式,而以下為 CTM 逐步演算流程:. Setp1. 初始化設定 路段全長 L 公尺、自由流速率、飽和密度、最大流量、最大容量…等初始 條件,各上下匝道所對應的格位以及上匝道的流量。. Step2. 呼叫卡門濾波所推估出的 OD 比例 bij(k)。 Step3. 根據式(11)、(12)計算每個格位於每個時階所應傳遞的車輛數。 Step4. 分別計算某時階不同起點於相同迄點抵達之比例 ρ ijm (k ) 。 為了驗證 CTM 在不同車流狀況下車隊消散的型態,以四種交通狀況進行模 擬,假設有六個交流道之高速公路路段,交流道位置為均勻分佈,自由流速度為 27.
(38) 100(km/hr),擁擠密度為 400(veh/km),6 秒為一時階,格位長度為 1/6 公里,格 位最大容量為每格位 67 輛車,最大流率為每ㄧ時階通過 10 輛車,而此四種交通 流量分別是自由流、輕微同步流 (light synchronized flow) 、嚴重同步流 (heavy synchronized flow) 、 擁 擠 流 。 同 步 流 (synchronized flow) 係 由 Kerner and Herrmann(1998)所提出的,主要的概念為隨著交通量的增加,微小的車隊間干擾 便會造成遠超過臨界流量的影響,意思就是說,當交通量逐漸增加,路段上的車 輛便會受到鄰近車輛的影響,無法依照期望的駕駛速率行駛,於是就產生與其他 車輛同步的駕駛行為。而本研究便以自由流之車流量依倍數調整為輕微同步流、 嚴重同步流,與擁擠流之四種不同的交通擁擠狀況。 因此,本研究為說明 CTM 模式能於不同的路段擁擠狀況正確的預測路網中 車輛到達型態之分佈情形,特以圖 6 之路網規模分別給予四種不同的交通流量, 藉由 CTM 模式模擬之車輛到達型態如下圖 7 所示,(a)顯示在自由流的情況下到 達迄點交流道 7 之車輛幾乎都是在一或二個時階內就會抵達,然而,當車流量逐 漸增加時,車隊消散的情形就會越明顯,如圖中(b)-(d)顯示,到達迄點交流道 7 之車輛會隨著車流量的增加,到達的時階就會越分散在數個時階。是故,CTM 模式能有效且正確的反應出不同交通流量之到達型態的影響。. 圖 6 路網範例. 28.
(39) 1.2. b07. 0.6. b07. 1. b17. 0.5. b17. b27. 0.4. b27. b37. 0.6. 0.3. b47. b37. 0.2. 0.4. b57. b47. 0.8. 0.1. b67. 0.2. b57. 0. b67. 1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49. 0 1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49. interval. interval. (b) 輕微同步流. (a) 自由流 0.4. b07. 0.35. b17. 0.3. b27 b37. 0.25. 0.25. b27. b17 b37 b47. 0.15. b57. 0.15. b07. 0.2. b47. 0.2. 0.3. b57 b67. 0.1. b67. 0.1. 0.05. 0.05. 0. interval. 0. 1. 1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49. 4. 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 interval. (d) 擁擠流. (c) 嚴重同步流 圖 7 不同交通流量下車隊到達型態. 29.
數據


+6




Outline
相關文件
This study focuses on modal characteristics of single stage planetary gear systems and their dynamic characteristics under variant wind types of extreme fluctuation excitations..
This study applies the balanced scorecard method to elementary school’s traffic safety education by referring previous related studies.. In addition, the importance
This study investigates the effects of the initial concentration, initial pH value, and adsorption temperature on the adsorption behaviors between Cr(IV) ion with a
Analyses of traffic phase transition could give an insight into traffic flow phenomena and designing traffic control strategies.. Keywords: Cellular Automata, NaSch
Therefore, a new method, which is based on data mining technique, is proposed to classify driving behavior in multiclass user traffic flow.. In this study, driving behaviors
Four aspects are discussed within this article, including the importance of traffic safety education, the current educational state, the opinion of giving support and
To understand the Internet addiction behaviors, this study inquires the personal and family related factors, online experience related factors, interpersonal interactions
In this study, Technology Acceptance Model (TAM 2) is employed to explore the relationships among the constructs of the model and website usage behaviors to investigate
