國立交通大學
機 械 工 程 學 系
碩士論文
鞋氣墊吸震試驗之有限元素分析
The Finite Element Analysis
on Shock Absorption Test of Air-Cushion in Shoes
研 究 生:黃 詠
指導教授:洪景華 教授
ii
鞋氣墊吸震試驗之有限元素分析
The Finite Element Analysis on Shock Absorption Test of Air-Cushion in Shoes
研 究 生:黃 詠 Student:Yong Huang
指導教授:洪景華 Advisor:Ching-Hua Hung
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering June 2009
Hsinchu, Taiwan, Republic of China
i
鞋氣墊吸震試驗之有限元素分析
研究生 : 黃 詠
指導教授 : 洪景華 教授
國立交通大學機械工程學系
摘要
鞋氣墊吸震試驗係根據英國SATRA 技術研究中心之試驗標準 PM142 所進 行,此試驗標準主要針對鞋樣或鞋中底之測試所制定,為鞋業主要判定鞋樣或鞋 中底舒適度與能量回饋率之試驗法。如今雖然鞋氣墊製做技術突破,但是在開發 時依然以經驗法則為主,並無相應的分析系統輔助,因此若能建立起一組以有限 元素法為基礎之分析系統,對鞋氣墊吸震試驗進行模擬與並輸出其分析結果提供 參考,則可使氣墊設計工作進行的更有效率。 本研究根據超彈體材料的理論設計並規劃簡易拉力、平面剪力與液壓膨脹三 種不同之材料實驗,並以MSC.Marc 為有限元素模擬分析軟體進行計算。分別取 得三種實驗數據後代入五參數項之三階Mooney-Rivlin 超彈體方程式,計算出合 適之材料參數以建立有限元素分析所需之超彈體材料模型。在此超彈體材料模型 經過液壓膨脹實驗之有限元素模擬之驗證後,以Single-Step Houbolt 為動態響應 控制器,完成對鞋氣墊吸震試驗之動態有限元素分析模擬並與實際試驗比較驗證, 最後對此模擬分析系統未來繼續發展的可能性作討論。 關鍵字: 鞋氣墊、有限元素、超彈體、Mooney-Rivlin、Single-Step Houbolt、 MSC.Marc、吸震試驗。
ii
The Finite Element Analysis
on Shock Absorption Test of Air-Cushion in Shoes
Student:Yong Huang Adviser:Dr. Chinghua Hung
Department of Mechanical Engineering
National Chiao Tung University
Abstract
The shock absorption test of air-cushion in shoes is conducted according to experimental standard PM142, which is defined by SATRA for determining the percentage energy return and comfort of shoes. Although manufacturing technique had been improved these years, “try and error” is still the working method for designing. With developing finite element analysis system, simulation of the shock absorption test of air-cushion in shoes could now help the designer to work more efficiently.
In this research, three experiments had been conducted according to the theory of hyperelasicity: simple tension test, planar shear test and bulging test. By importing the results of these experiments, a hyperelastic material model for the air-cushion is defined by Mooney-Rivlin function of third order with five constants. After the material model is validated with MSC.Marc and bulging tests, the simulation of the shock absorption test of air-cushion in shoes is carried out by Single-Step Houbolt method. The simulation results agrees with shock absorption test.
iii
誌謝
過了這麼久的時間,終於打到誌謝的內容,我想,在精密工程與模擬實驗室 的歷屆碩士成員中,我應該是最難產的一位,不只是碩士而且還是碩四。這邊我 必須要特別感謝我的指導教授洪景華老師,本來我在父親公司幫忙完後回來繼續 完成碩士學業,是預計半年內搞定。只是沒想到一坐下來就屁股黏著將近一年, 但老師卻沒有放棄我這個碩四生,除了對我鼓勵打氣外,論文很多方向也都提供 了關鍵的意見與指導,實在讓我非常感激,而老師對學問嚴謹的態度也讓人欽佩, 期盼自己未來面對任何學問都能以老師為榜樣。此外也要感謝口試委員陳復國教 授、徐瑞坤教授與與陳申岳經理在研究論文上部份給予的意見與指導,除了讓我 學習到更多東西外,也讓這篇論文的內容修正得更完整。 曾經有想過,因為我碩士生涯要寫進來感謝的人太多,所以應該可以謝天, 不過這樣的做法實在跟我的風格差太遠,如果放過論文中唯一可以超級亂寫的部 份,我想我可能就不叫黃詠了。對我來講,在交大的這段期間內,有緣待在精密 工程與模擬實驗室與大家共處,著實是件非常幸運的事情,今天這篇論文能夠完 成,我必須對每個人都表達我的感謝。 歷練豐富的榮崇學長,希望你桃李事業能順遂,以後我會很驕傲地對我小孩 說:「這位教授以前曾坐在你爸旁邊看霹靂布袋戲」;常分我東西吃的宇中學長, 因為有你我才能進這間實驗室,每次你分我東西吃時其實我都有說不出的感激, 而且不管是學問或是人生道理也從你那學到很多;適合選省長的政成學長,雖然 我隸屬於生醫部隊只有一段極短的時間,但你風趣的談笑方式讓我印象深刻;熱 血Rocker 煌棊學長,我不會忘記你踢進球時的豪爽,跟你一樣身為南投男兒實 在有幸;虎尾好老師正展學長,除了常在早上來實驗室時抓到我龜在電腦前一整 晚,其實你的攝影技術真的很棒;低調沉穩的麒禎學長,感謝你在研究上常提供
iv 我意見,在鄉民議題上也常可以跟你有所共鳴;愛看動漫的銘傑學長,你是我見 過除了我哥之外最愛看動漫的人,對動漫熱情的執著讓人敬佩;同樣是元智機械 出身的嘉偉學長,回想起來已經很久沒一起打球了,很感謝碩一時你的不少照顧; 樂觀開朗的挫冰,你是我們這屆開心解憂的好伙伴,盼你能早日成為一家之主; 我的室友宗駿,感謝你在課業上的火力支援,最佳化的同組報告我一直懷恩在心; 坐我旁邊的小強,你魔法風雲會真的打得很神,我要特別感謝你造就我認識我女 友的機會;書卷獎代表志嘉,你也常早上來實驗室時抓到我龜在電腦前一整晚, 你對學業認真負責的態度讓我非常敬佩;電腦大內高手世璿,實驗室的公用電腦 真是有勞你了,感謝你在電腦方面的專業協助;同樣明道中學畢業的運賢,感謝 那次威秀看變形金剛,因為有你的卡所以用半價就看到了;聯誼達人俊羿,雖然 你可能已經不記得,但我一直很感謝你有請我吃過烤地瓜;魔鬼筋肉人聖平,感 謝有你在就能放心地說冷笑話,因為一定能得到回響;認份老實的時恆,每次跟 你聊天都會變成探討人生大道理,你真的是太容易讓人掏心掏肺了;背影跟我一 模一樣的建榮,有勞你一進實驗室就背負「黃詠弟」的稱號,不過你獨樹一格的 拍掌喊水堪稱本實驗室之一絕;打鼓老師麒翔,只要有事情需要幫忙你常常會衝 第一,身為學長的我實在覺得就甘心;頭光光的忠諭,你能夠把畢業時間控制在 碩一暑期,讓我這碩四暑期畢業的真有些兒害羞;神奇的正一,常常會在夜半神 奇的時間看到你開門走進實驗室,激起我按Alt+Tab 繼續進行學術研究的鬥志; 不囉嗦的立釗,跟你說話真的很有趣,希望你周遭的實驗設備可以跟你一起平安 快樂地成長;與命運對抗的筱瑋,天將降大任於斯人也,但我相信到時你的畢業 論文可以很順利的;坐我後方的宗錞,每次我開始偷打小遊戲時轉頭就換看見你 專業的分析軟體視窗,讓我不禁又會燃起按Alt+Tab 繼續進行學術研究的鬥志。 本篇論文也要另外感謝最佳化實驗室的黃智宏學長,提供Labview 方面的指 導與意見;曾經在創應的黃春穎大哥與現任創應研發經理的蘇宏平先生,在 MSC.Marc 有限元素分析軟體上提供許多資訊與建議。此外在碩士這些年的生活
v 中,感謝好友宥均與家瀧的鼓勵打氣,雖然我們亂說話的比例比較大,但讓我更 有氣力繼續奮戰;也謝謝在交大熱舞社相遇的伙伴們及O.G.C 的各位,雖然我 是個不務正業會跑去活動中心蠕動的碩班生,但這些跳舞的時光都成為我精神上 動力的一部份。 然後我要特別感謝我的女友安婷,本身面對法研所課業與國家考試的壓力, 但還是會南下新竹來探訪鼓勵我,全心全力地支持我將研究完成,雖然有時會突 然很激動亂戳別人,但希望未來能一起生活並互相扶持。 最後,我要感謝我的父母,若沒有他們,今天也不會有我完成這樣一篇論文。
vi
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝... iii 目錄... vi 表目錄 ... ix 圖目錄 ... x 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 鞋氣墊發展簡介 ... 2 1.2.1 結構特性... 3 1.2.2 材料特性... 4 1.3 研究動機與目的... 5 1.4 研究規劃... 6 第二章 實驗理論與實驗規劃 ... 8 2.1 超彈體材料模型... 8 2.1.1 超彈體基礎理論推導... 8 2.1.2 非線性材料模型之有限元素模擬軟體... 13 2.2 單軸向實驗理論... 13 2.3 雙軸向實驗理論... 15 2.3.1 雙軸拉力實驗理論... 16 2.3.2 液壓膨脹實驗理論... 17 2.4 簡易拉力實驗與平面剪力實驗... 19 2.4.1 實驗規劃... 19 2.4.2 實驗設備... 20 2.4.3 實驗結果... 21 2.5 液壓膨脹實驗... 22 2.5.1 實驗規劃... 24 2.5.2 實驗設備... 27 2.5.2.1 夾具系統... 28 2.5.2.2 液壓系統... 29 2.5.2.3 閉回路控制系統... 30 2.5.3 實驗結果... 33 2.5.3.1 液壓膨脹之實驗數據合理性... 33 2.5.3.2 不合理因素與推測之材料曲線... 35 第三章 材料模型驗證 ... 37
vii 3.1 Mooney-Rivlin 材料模型建立 ... 37 3.1.1 絕對誤差與相對誤差計算... 39 3.1.2 參數之調整與討論... 41 3.2 液壓膨脹實驗模型建立... 49 3.3 模擬分析結果與實際實驗比較... 52 第四章 鞋氣墊吸震試驗之模擬分析 ... 54 4.1 鞋氣墊吸震試驗... 54 4.2 類似研究之文獻回顧... 55 4.3 Single-Step Houbolt 動態響應理論 ... 56 4.4 鞋氣墊吸震試驗之分析模型... 57 4.4.1 CATIA 建立分析模型 ... 59 4.4.2 Hypermesh 網格規劃 ... 59 4.4. 3 邊界條件與模擬參數... 62 4.4.3.1 前處理階段... 64 4.4.3.2 求解器階段... 66 4.5 吸震試驗模擬結果... 67 4.5.1 內部壓力變化... 68 4.5.2 衝槌穿透距離... 69 4.5.3 衝槌減加速度... 69 4.5.4 能量回饋率... 70 4. 6 綜合討論... 70 4.6.1 模擬與實際吸震試驗之差異... 71 4.6.2 鞋氣墊網格模型厚度方向影響... 73 4.6.3 時間步增量之影響與模擬之變形量... 74 4.6.4 本章小結... 75 第五章 結論 ... 76 5.1 鞋氣墊動態有限元素分析系統繼續發展之可行性... 76 5.2 改善與發展方向... 77 5.2.1 實驗規畫改良... 77 5.2.2 其他超彈體材料模型測試... 79 5.2.3 逆向建模改良與模流分析... 79 5.2.4 更多動態模擬分析之驗證樣本建立... 80 參考文獻 ... 81 附錄A 鞋體架構簡圖參考 ... 83 附錄B Mooney-Rivlin 超彈體方程式推導 ... 84 附錄C 液壓膨脹應力應變式推導 ... 87 附錄D 夾具系統之設計規格圖 ... 89 附錄E 等效雙軸應力曲線推測 ... 93
viii
附錄F Herrmann 特性元素 ... 95
附錄G Single-Step Houbolt 動態響應方程式推導 ... 96
附錄H Newmark-beta 動態響應方程式與分析結果 ... 98
ix
表目錄
表1.1 結構簡圖與特性比較... 4 表1.2 聚酯型與聚醚型 TPU 特性比較 ... 5 表2.1 簡易拉力與平面剪力主要之實驗參數... 20 表2.2 液壓膨脹主要之實驗參數... 25 表3.1 MSC.Marc 所計算之三階 Mooney-Rivlin 參數項 ... 39 表3.2 調整前參數項與調整後參數項數值表... 48 表3.3 決定之參數項數值表... 53 表4.1 實際吸震試驗與模擬分析結果比較... 71x
圖目錄
圖1.1 1980 至 2005 年歐美氣墊專利數... 3 圖1.2 研究規劃流程圖... 7 圖2.1 簡易拉力與平面剪力實驗... 14 圖2.2 雙軸拉力實驗... 16 圖2.3 液壓膨脹實驗示意簡圖... 18 圖2.4 簡易拉力實驗試片... 19 圖2.5 平面剪力實驗試片... 20 圖2.6 簡易拉力與平面剪力實際實驗... 21 圖2.7 簡易拉力實驗結果與平面剪力實驗結果... 22 圖2.8 液壓膨脹實驗整體架構概念... 23 圖2.9 液壓膨脹實驗建立流程... 24 圖2.10 液壓膨脹實驗試片... 24 圖2.11 標準之實驗作業流程規劃 ... 26 圖2.12 液壓膨脹實驗設備實際實驗之膨脹狀況... 27 圖2.13 系統群彼此間作用示意... 28 圖2.14 夾具系統實際成品加上電阻尺與電路板... 29 圖2.15 油路設計示意圖... 30 圖2.16 閉迴路控制系統之前端控制面板... 32 圖2.17 閉迴路控制系統之功能圖塊... 32 圖2.18 液壓膨脹實驗結果... 33 圖2.19 本研究各項實驗數據之平均曲線... 34 圖2.20 MSC.Marc 所附之實驗數據與一般雙軸拉力實驗 ... 34 圖2.21 推測之材料曲線建立流程... 36 圖2.22 本研究原實驗數據與推測之材料曲線... 36 圖3.1 Mooney-Rivlin 材料模型建立流程 ... 37 圖3.2 絕對/相對誤差計算之三階 Mooney-Rivlin 超彈體材料模型 ... 40 圖3.3 超彈體模型 C10 項對應力應變曲線產生之影響 ... 42 圖3.4 超彈體模型 C01 項對應力應變曲線產生之影響 ... 43 圖3.5 超彈體模型 C11 項對應力應變曲線產生之影響 ... 44 圖3.6 超彈體模型 C20 項對應力應變曲線產生之影響 ... 45 圖3.7 超彈體模型 C30 項對應力應變曲線產生之影響 ... 46 圖3.8 單獨以簡易拉力之應力應變曲線為目標做趨近調整... 47 圖3.9 調整前/後參數項應力應變曲線與實際實驗數據... 48 圖3.10 液壓膨脹實驗之有限元素模擬... 49 圖3.11 液壓膨脹實驗之液壓邊界條件 ... 51
xi 圖3.12 將實驗之膨脹液壓作為邊界條件之模擬分析結果... 52 圖3.13 調整前/決定之參數項應力應變曲線與實際實驗數據... 53 圖4.1 鞋中底吸震試驗示意簡圖... 54 圖4.2 第三代立體支撐鞋氣墊... 58 圖4.3 鞋氣墊所獨立出之部位... 58 圖4.4 完成之立體氣墊圖... 59 圖4.5 網格自動規劃生成之模型與整理功能... 60 圖4.6 調整前/後之網格... 61 圖4.7 網格幾何品質良好之鞋氣墊模型... 62 圖4.8 鞋氣墊模型定位拘束與鞋氣墊模型對稱面拘束... 63 圖4.9 鞋氣墊內部膨脹壓力邊界條件... 63 圖4.10 鞋氣墊吸震試驗模擬之完整模型... 64 圖4.11 鞋氣墊模型在吸震試驗模擬中最大變形狀況 ... 68 圖4.12 靜態階段膨脹/動態階段衝擊之壓力變化... 68 圖4.13 衝槌穿透距離與時間之關係曲線圖... 69 圖4.14 衝槌減加速度與時間之關係曲線圖... 70 圖4.16 鞋氣墊實際試驗示意...73 圖4.15 鞋氣墊模型在靜態階段之體積變化... 73 圖5.1 在大變形時仍維持雙軸拉力應變狀態之範圍... 78 圖5.2 二測量點之量測方式... 78 圖C.1 試片膨脹高度 h 小於初始平面圓半徑 R0 ... 87 圖C.2 試片膨脹高度 h 大於初始平面圓半徑 R0 ... 87 圖D.1 支架部件:電阻尺支架組件 ... 89 圖D.2 支架部件:電路板支架組件與試片座支架組件 ... 90 圖D.3 總底座部件 ... 91 圖D.4 試片座部件 ... 92 圖E.1 數據比例矩陣 Aoriginal之曲線圖與處理後之新曲線 ... 93 圖H.1 以 Newmark-beta 為動態響應控制器之分析結果 ... 98
1
第一章 緒論
1.1 前言
對於各類型機具的避震系統,氣體避震皆屬於首選,尤其是以一般空氣填充為優先, 其原因主要有二:氣體分子具有可壓縮的特性,以及一般空氣成本低廉且易取得填充來 源。因為上述的特性,在現代科技中不論是大型民航機所用之空氣彈簧,或是一般車輛 所使用的輪胎都是使用一般空氣之氣體避震為媒介。對目前的鞋業來說,採用氣體避震 的鞋氣墊也是屬於避震系統首選,與其他機具之氣體避震系統不同,對人體運動方式而 言鞋氣墊具有能量回饋的功能性。 自從氣體避震在1979 年被引進運動鞋中底(鞋類結構簡圖請見附錄 A)成為氣墊 後,現為鞋中底高階避震系統之設計主流。雖然,最早使用氣墊系統的鞋類是休閒鞋類, 但從鞋業歷史與發展來看,運動鞋開始使用氣墊系統是發展關鍵,而現在市面上採用鞋 氣墊的運動鞋亦屬於偏高單價定位。根據台灣區製鞋工業同業公會統計,台灣對外出口 鞋類之中除未分類者外,運動鞋屬於最大宗,2006 年銷售額 2311 萬美元,2007 年成長 到2545 萬美元,雖然採用氣墊避震系統的運動鞋在數量上不到百分五,但是在銷售額 卻超過運動鞋類的百分之十。 對於台灣鞋業而言,如果能對氣墊避震的設計與分析建立完整的系統,在採用氣墊 系統時將可降低成本且確實提升功能性,進而使氣墊避震系統的運動鞋比例提升,對整 體產業成長將有相當的助益。台灣早期是全球鞋類生產與開發重鎮,海島國家的背景讓 產業精緻化及科技化變得相對重要,未來在鞋業上若要能有新的發展契機與方向,建立 鞋氣墊避震的設計與分析系統將會是其中一個重點。2
1.2 鞋氣墊發展簡介
最早具有氣墊避震概念的鞋類專利在1882 年於 USPTO(United States Patent and Trademark Office)登記[1],當時的氣墊避震係在皮靴大底置入簡易氣囊以減震。在鞋 業上最早將氣墊概念商業化的是1960 年的 Dr. Martens 公司,當時氣墊技術是用於休閒 鞋類的減震效用。直到1979 年,Nike 推出了第一雙在中底採用氣墊避震系統的運動鞋 「Tailwind」後,鞋氣墊良好之能量回饋率才逐漸被重視[2],此刻鞋氣墊正式走入鞋產 業在運動鞋上的應用,當時鞋氣墊的架構係為第一代平面支撐。 1980 到 2005 年美國與歐盟鞋氣墊專利的公告總數統計如圖 1.1 所示[3],專利數量 自80 年起便有成長趨勢,1989 與 1990 年間達到一次高峰,當時鞋氣墊架構已步入第二 代中空孔柱支撐。隨著主打氣墊系統的Nike 公司在企業上的成長,在 1996 年起鞋氣墊 專利數目開始急速提升,再加上1997 年 Nike 大分子氣體氣墊專利到期後技術開放,使 得1998 至 1999 年間專利數達到第二次高峰,之後因大分子氣體氣墊在生產技術上受限, 專利數目逐漸下滑。2003 至 2004 年間,Nike 在鞋氣墊生產技術上有新的進展,爾後的 鞋氣墊專利數目便又再逐漸上昇。
2006 年初,Nike 以新的多層膜生產技術推出了「Air Max 360°」系列鞋款,此時鞋 氣墊的架構雖然仍停留在第二代中空孔柱支撐,但相較於前幾年該公司所使用之鞋氣墊 架構,此時的第二代中空孔柱支撐之設計已達到一個相當成熟的階段。2007 年,禾懋公 司改變傳統生產鞋氣墊的技術,其創辦人黃英俊先生,用改良式自升高壓之技術成功地 製造出第三代立體支撐的鞋氣墊架構。以擔任過Nike 顧問的資深氣墊研發經驗為基礎, 黃英俊先生將原本生產上受限對稱式形狀的架構,提升為可生產成立體延伸且非對稱式 形狀。2008 年,禾懋公司將自有品牌 Dr. Air 引入市場,鞋氣墊在架構上已正式跨入第 三代的立體支撐。
3 圖1.1 1980 至 2005 年歐美氣墊專利數[3]
1.2.1 結構特性
氣墊避震系統除了前文所述之避震與良好之能量回饋率外,亦可應用於改變鞋內衛 生環境與改變鞋襯架構等功能。因其採用空氣填充,具有較其他避震系統為輕之重量, 而在受壓產生形變後氣墊內部之氣體壓力在空間中每點均等,因此用於足底均壓設計也 有優異之表現。 鞋氣墊發展至今已有相當多不同類型之設計,根據氣墊構造可將鞋氣墊分為三種類 型,以發展之時間先後順序依次歸類為第一代平面支撐、第二代中空孔柱支撐與第三代 立體支撐,其構造簡圖及特性比較如表1.1 所示(以足跟部位為範例)。 22 16 18 18 23 29 28 37 33 42 40 30 38 28 42 37 36 55 74 71 61 50 45 41 66 54 0 10 20 30 40 50 60 70 80 1980 1981 1982 1983 1984 1985 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 專利數量 (件 ) 公告年份(西元)4 . 表 1.1 結構簡圖與特性比較 後視簡圖 上視簡圖 特性比較 第一代 平面支撐 ‧低成本 ‧生產速度快 ‧低耐用度 ‧低穩定性 第二代 中空孔柱支撐 ‧穩定性較佳 ‧產品成熟 ‧限制對稱形狀 第三代 立體支撐 ‧穩定性最佳 ‧能量回饋最佳 ‧採支撐肋架構 ‧目前成本較高
1.2.2 材料特性
鞋氣墊目前以TPU(Thermal-plastic Polyurethane,熱塑性聚氨酯)為主,通常選用 邵氏硬度範圍80 至 90 間者為製造原料。這個範圍內的 TPU 之機械性質雖然與橡膠相 似,但在抗拉強度或是抗磨強度上的表現都比橡膠來得優異,並且連續長時間的使用溫 度可達80˚C 到 90˚C,同時也具備耐油與耐溶劑能力[4]。TPU 係屬於 PU-Rubber(Polyurethane Rubber,聚氨酯橡膠)之一種,在 1950 年代 首次被文獻提及,1960 年代早期便已應用於商業上。因為 TPU 有著近似 CPU(Cast Polyurethane,澆鑄型聚氨酯)與 MPU(Millable Polyurethane,混煉型聚氨酯)相同的 物理性質,但又可適用於一般之熱塑性加工技術,因此廣泛地被應用在各種複雜結構之 零件製品[5]。
5 部分,其中根據A 的成份可將其分為聚酯型(Polyester)與聚醚型(Polyether)兩大類。 聚酯型TPU 與聚醚型 TPU 特性之比較如表 1.2 所示[4][5][6], 若舉市面上鞋類產品之 中底所使用的氣墊系統為例,Nike 公司所使用者屬於聚酯型 TPU,禾懋公司所使用者 屬於聚醚型TPU,本研究將以聚醚型 TPU 材料為主。 表1.2 聚酯型與聚醚型 TPU 特性比較 聚酯型TPU 聚醚型TPU 原料成本 較低 較高 原料比重 約1.13 到 1.22 相同機械性質下較重 約1.04 到 1.20 相同機械性質下較輕 抗水解能力 浸純水中8 週完全分解 約為聚酯型之5 到 10 倍 氣體保存能力 較佳 較弱 抗黃變 佳 紫外線照射後易黃變 抗菌解 極差,需添加抗菌劑 佳
1.3 研究動機與目的
鞋氣墊如今已發展到第三代立體支撐,而生產技術上也突破既往傳統之限制。然而, 鞋氣墊製造技術不斷地變革,目前卻無相應的分析系統使產品有更高功能性之提升。就 傳統而言,因為鞋氣墊在生產技術上受限過多,發展電腦模擬之分析系統來輔助設計並 無太大實質意義。但現今傳統之生產技術限制現已被突破,鞋氣墊之設計所面臨的是更 寬廣且更高要求的功能性提升,建立一個有參考價值之分析系統將是件重要的工作。 第三代立體支撐之鞋氣墊幾何架構複雜,屬薄膜與柱之綜合立體架構,在運動過程 中會產生極大的變形量;同時因為有氣體壓縮特性,在模擬分析時也必須考慮氣墊內體 積改變所造成的壓力變化。因此,除了其立體幾何模型與網格規劃有更高的複雜度外, 在有限元素分析上也牽涉到大變形分析與變動之邊界條件。6 針對第三代立體支撐之新型氣墊架構,本篇研究主要目的為建立此類氣墊之動態有 限元素分析系統,包含最初取得材料性質的相關實驗理論與鞋氣墊模型建立等等,並且 實現其動態之吸震試驗模擬,最後對其未來發展的可能性作討論。
1.4 研究規劃
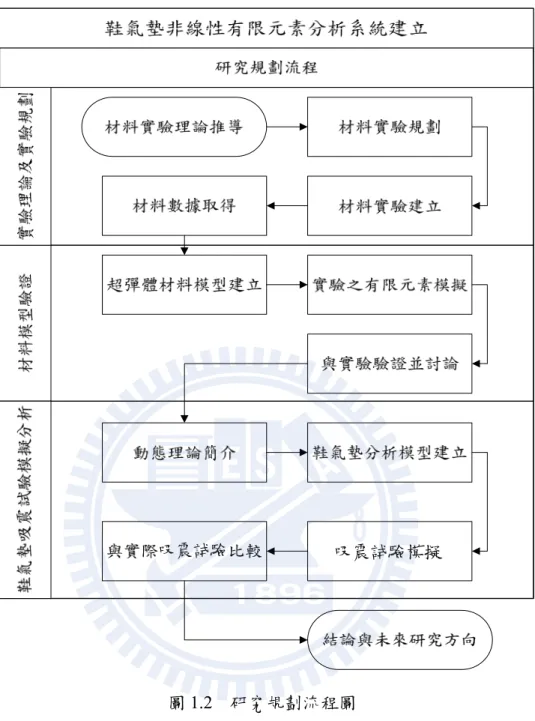
本研究規劃主要分為三主體部份:第一部份為實驗理論與實驗規劃,第二部份為材 料模型驗證,第三部份為鞋氣墊吸震試驗之模擬分析。此三主體部分的流程圖如圖1.2 所示,圖中橫間格框為主體部分,實線框為細部工作,箭頭方向為工作流程進行之順序。 (1)實驗理論與實驗規劃:此部分包含了材料實驗理論推導、材料實驗的規劃、 建立以及數據的取得。對單軸向之簡易拉力與平面剪力實驗而言,可用一般拉微型拉伸 機台完成實驗並取得材料數據;而雙軸向之雙軸拉力實驗所要求的機具規格特別且不易 尋得,因此本研究規劃自行設計液壓膨脹實驗,取得等效之雙軸向實驗數據。 (2)材料模型驗證:本研究主要使用的材料模型為超彈體(Hyperelasticity)模型, 係根據實驗數據取得合適的參數後建立之材料模型。因為超彈體材料模型係屬於數值近 似之材料模型,必存在相對之誤差,所以必須透過模擬來討論比較,再確定最適合之材 料參數。在材料模型驗證這一部份中,包含了超彈體參數計算與超彈體材料模型建立, 再以實驗之有限元素分析模擬比對實際實驗之結果,最後討論合理材料模型之參數項數 值。 (3)鞋氣墊吸震試驗之模擬分析:此部份包含了動態理論簡介、鞋氣墊經簡化過 之立體幾何模型建立、其有限元素網格之規劃,與吸震試驗之有限元素模擬。本研究吸 震試驗之有限元素模擬比較對象為財團法人鞋技中心進行之實際試驗,其試驗步驟之制 定係根據於英國SATRA 技術研究中心之試驗標準 PM142。7
圖1.2 研究規劃流程圖
吸震試驗模擬
8
第二章 實驗理論與實驗規劃
2.1 超彈體材料模型
本研究規劃之實驗,係根據有限元素分析中超彈體材料模型之需求所設計。超彈體 (Hyperelasticity)即為以應變能密度(Strain Energy Density)敘述之材料模型,其為一 種數值近似材料模型,可針對如橡膠類彈性範圍內材料曲線呈非線性者,在大變形狀況 下以有限元素分析進行模擬。一般而言,超彈體方程需要有三項實驗數據為基礎來計算 合理之材料參數,此三項實驗分別為簡易拉力實驗、平面剪力實驗(或純剪力)與雙軸 拉力實驗。
超彈體材料模型主要分成三個領域[7]:現象邏輯型(Phenomenological),如 Mooney-Rivlin、Odgen、Yeoh、Polynomial 等;機械理論型(Mechanistic),如Arruda-Boyce、 Neo-Hookean 等;混合型(Hybrid),如 Gent 等。本研究超彈體材料模型選用邏輯型之 三階Mooney-Rivlin 超彈體方程式為研究對象,以自行規劃建立之實驗來計算其合理之 參數項數值。本節將對超彈體之基礎理論推導,以利後續章節實驗理論相關推導式之觀 念銜接,三階Mooney-Rivlin 超彈體方程式之深入推導請見附錄 B。
2.1.1 超彈體基礎理論推導
超彈體材料模型係將材料假設為等向性(Isotropic),計算其應變能密度U 之變化。 對於現象邏輯型者而言,此應變能密度U 係由拉伸或應變所構成之不變量(Invariant) 敘述[8],即 U 將會隨著變形量的不同而改變。應變能密度 U 由兩部份組成,分為不可 壓縮敘述項Uincomp與可壓縮敘述項Ucomp:9 comp incomp U =U +U
(2.1)
因為本研究使用之聚醚型TPU 之蒲松比極接近 0.5,所以將材料假設為不可壓縮, 只針對應變能密度不可壓縮敘述項Uincomp做討埨。Uincomp可用Right Cauchy-Green 變形張量 C 來表示,如下列式子所示[9]:
r n n n n incomp n tr( ) + tr( ) 2n 2n A B U ⎡⎢ − ⎤⎥ ⎣ ⎦ =
∑
C −I C −I(2.2)
其中An與Bn為常數,即超彈體材料模型之參數項。而Right Cauchy-Green 變形張量 C 又可由變形梯度F 計算得出[10]。將某物體內變形後鄰近兩點之距離寫為dx =dxmnJJGm , 而未變形物體內此二點之距離寫為dX =dXmeJJGm , em JJG (m=1, 2, 3)為互相垂直之單位 向量,則存在變形梯度F 可使此物體中兩點之變形寫為: = dx F dX(2.3)
變形梯度F 可由下列定義式(2.4) 算出 Right Cauchy-Green 變形張量 C: T=
C F F
(2.4)
今假設一長度向量 (1) 1 1 d eS = dS JG位於dX 互相垂直的單位向量其中之一上,代入式 (2.3)經過變形梯度轉換後計算可得: (1)=
(1)d
s
Fd
S
(2.5)
其中 (1) 1 1 d ns = ds JJG,n1 JJG 為eJG1被變形梯度F 轉換後之向量。將ds
(1)與ds
(i)做內積計算並把式 (2.4)代入,可得以下式子:10 (1)⋅ (i)
=
(1)⋅ (i)d
s
d
s
Fd
S
Fd
S
(2.6)
根據張量之移項定理(Transpose)變換式(2.5)右側可得: (1)⋅ (i)= (1)⋅ T (i)d
s
d
s
d
S
F Fd
S
(2.7)
(1)⋅ (i)=
(1)⋅ (i)d
s
d
s
d
S
Cd
S
(2.8)
當d
s
(i)=
d
s
(1)時,式(2.7)可展開成為下式: 1 1 1 1 1 1 1 1d n d n
s
JJG⋅s
JJG=
d e
S
JJG⋅C
d e
S
JJG(2.9)
1 1 1 2 2(d )
s
=
(d ) e
S
JJG⋅C
(2.10)
根據張量基本運算原理C
pq= ⋅
e
pC
e
qJJG JJG
,所以式(2.9)可改寫為: 2 1 11 1 d ( ) d s S = C(2.11)
同理,根據dX 另外二個互相垂直之單位向量,再次依式(2.4)到(2.8)之步驟計算,則可 得Right Cauchy-Green 變形張量 C 另外二對角元素 C22以及C33: 2 3 2 2 22 33 2 3d
d
(
)
(
)
d
d
s
s
S
=
C
,S
=
C
(2.12)
若將式(2.7)中的d s( i )代換為 (2) 2 2 d ns = ds JJG,再次依式(2.8)到式(2.9)之步驟計算,可解 得非對角元素C12(同理可得C23與C31):11
(
)
1 2 1 2 12 1 2 d d ( ) cos n , n d d s s S S = C JJG JJG(2.13)
在上式中cos n , n(
JJG JJG1 2)
代表向量JJGn1與向量nJJG2 夾角之餘弦值,而又因為變形梯度F 本身可 視為剛體旋轉張量R 與純拉伸張量 T 之組合: = F RT(2.14)
其中剛體旋轉張量R 屬正交張量(意即正轉後再逆轉則物體空間位置不變),所以若將 式(2.14)帶入式(2.3)則得 Right Cauchy-Green 變形張量 C 由純拉伸張量 T 所組成,因此 在變形後之三向量nJJGm (m=1,2,3)仍互相垂直之條件下,則式(2.10)到式(2.12)所推導計 算之總和即為各主軸拉伸λ(Principle Stretch)平方之總和,其與C之關係亦可以下式 表示: 2 2 2 2 mm 11 22 33 tr( ) (C = λ ) =(λ ) +(λ ) +(λ )(2.15)
因為C 為正定且對稱(Positive Definite and Symmetric)且變形方式為主軸拉伸,
即代表不發生剪切拉伸(Shear Stretch),變形後三主軸仍互相垂直使得向量nJJGm與向量nJJGw
(m ≠ w)夾角之餘弦值cos n , n
(
JJG JJGm w)
為零,所以Right Cauchy-Green 變形張量 C 成為對 角張量,非對角之元素皆為零,此時式(2.15)
可擴展寫為: n 2n 2n 2n 2n n tr( ) ( mm) ( 11) ( 22) ( 33) Q = C = λ = λ + λ + λ(2.16)
n 2n 2n 2n 2n n tr( ) ( mm) ( )11 ( 22) ( 33) Q− = C− = λ − = λ − + λ − + λ −(2.17)
Qn與Q-n即為主軸拉伸所構成之不變量,可用來描述應變能密度。將上述二不變量 代回式(2.1)之中,即可將應變能密度不可壓縮項 Uincomp寫為下式:12
(
)
(
)
r 2n 2n n n mm mm incomp n +3
3
2n
2n
A
B
U
⎧⎨ ⎣⎡λ
− ⎤⎦ ⎣⎡λ
− − ⎤⎦⎬⎫ ⎩ ⎭=
∑
(2.18)
由式(2.18)之架構來看,對於只考慮不可壓縮項之等向性材料而言,其應變能密度 之方程式滿足Valanis-Landel 假說[7],意即能夠用三組分別獨立之主軸拉伸 λ(ii)以各別區分但相同架構之加總來呈現(λ(ii)右下角被括號之標號為單純做Free Index 而非 Dummy
Index)。 應變能密度U 之變化量在物理上可用來描述體積變化為 dV 之物體,其內部功 W 之 變化量,如下列式子所示:
( )d
U V
W
δ
= δ
(2.19)
而物體內之應力與體積變化項dV 同時亦可用來描述物體內部功 W 之變化量,所以根據 虛功原理的推導計算[9],應變能密度 U 對於主軸拉伸 λ(ii)做偏微分可得Lagrangian 主軸應力項σ(ii),即實驗中之工程應力(Engineering Stress)。對於本研究之材料假設為不可
壓縮之條件下,應變能密度U 即可用不可壓縮項 Uincomp來代表,如下式所示: incomp (ii) (ii) (ii) U U σ λ λ ∂ ∂ = = ∂ ∂
(2.20)
所以,式(2.20)對應變能密度不可壓縮敘述項 Uincomp偏微分後,可由原本式 (2.2) 中之參數項An與Bn決定超彈體模型中之應力應變曲線。與簡易拉力實驗、平面剪力實 驗與雙軸拉力實驗所量得之應力應變數據比對,則可計算參數項An與Bn之數值以產生 最近似之應力應變曲線,一般以最小平方誤差法比對與實際實驗數據之誤差以計算最合 適之參數項An與Bn。13
2.1.2 非線性材料模型之有限元素模擬軟體
現今大部份商用之有限元素分析軟體都具有計算超彈體非線性材料模型的功能,然 而,為了在非線性材料模型、變動之邊界條件與大變形的情況下能夠有良好的計算結果, 本研究選擇MSC.Software 公司針對橡膠類非線性材料所開發的非線性有限元素分析軟 體MSC.Marc,版本為 2007 r1。 MSC.Marc 於 1971 年正式釋出到市面上,是世界上第一款針對非線性問題之商用有 限元素模擬軟體[11],其求解器能進行眾多類型模擬並具備極強的結構分析能力,除了 可以處理非線性材料模型外,亦可處理非線性大變形與包含接觸在內之非線性邊界條件。 其軟體內部主要分為MENTAT 與 Marc 兩大部份,MENTAT 係屬前/後處理器,為圖 形對話界面;後者Marc 係屬求解器,具有高度數值穩定性、高精度與快速收斂之求解 技術。 本研究選用的Mooney-Rivlin 超彈體材料模型,在 MSC.Marc 中至少需要以下三項 材料實驗數據才可算出足夠合理之材料參數:簡易拉力實驗、平面剪力實驗與雙軸拉力 實驗。本研究即以此三項實驗數據需求為準則,進行後續章節之實驗規劃建立工作;而 在完成材料模型建立之後,再以非線性靜態分析與動態響應分析為主,進行材料實驗與 氣墊吸震試驗之有限元素模擬。2.2 單軸向實驗理論
簡易拉力實驗與平面剪力實驗都屬於單軸向實驗,其差異處在於簡易拉力實驗所使 用之試片規格長寬比例要求在10:1 以上,平面剪力實驗所使用之試片規格長寬比例要求 在1:10 以上。簡易拉力實驗與平面剪力實驗示意簡圖如圖 2.1,λx、λy與λz分別為三互 相垂直方向之拉伸。14 圖2.1 (a)簡易拉力實驗(b)平面剪力實驗 令λy之方向為實驗拉伸方向,簡易拉力實驗之應力σ 如式(2.21)所示: 0
0
x z yP
σ
σ
σ
A
= =
,=
(2.21)
P 為軸向拉伸力,A0為變形前之試片截面積。又假設所實驗之材料為等向性與不可壓縮, 即λxλyλz=1,又簡易拉力實驗在試片變形後之拉伸方向不改變,可將其視為主軸拉伸, 則簡易拉力實驗之拉伸狀態可用下列式子表示: 11 T 1 x λ λ λ = =(2.22)
T 22 y λ = λ = λ(2.23)
33 T 1 z λ λ λ = =(2.24)
λT為簡易拉力實驗之等效拉伸,將式(2.22)到式(2.24)中之計算結果代回式(2.18),使 應變能密度不可壓縮項Uincomp由簡易拉力實驗之等效拉伸λT表示,再經式(2.20)之計算 對等效拉伸λT偏微分,便得到與簡易拉力實驗相對應之等效應力式,可與實際簡易拉伸 (a) (b)15 實驗之應力應變數據做比對以決定參數項An與Bn。 令λy之方向為實驗拉伸方向,λx之方向為試片寬度方向,平面剪力實驗之應力σ 如 式(2.25)所示: 0
0
0
x y zP
σ
σ
σ
A
≠
,=
,=
(2.25)
P 為軸向拉伸力,A0為變形前之試片截面積。又假設所實驗之材料為等向性與不可壓縮, 即λxλyλz=1,且平面剪力實驗在 x 軸上之應變值極小可將拉伸視為 1,又試片變形後之拉 伸方向不變可視為主軸拉伸,因此平面剪力實驗之拉伸狀態可用下列式子表示: 11 1 x λ =λ =(2.26)
P 22 y λ =λ = λ(2.27)
33 P1
zλ
λ
λ
=
=
(2.28)
λP為平面剪力實驗之等效拉伸,將式(2.26)到式(2.28)中之計算結果代回式(2.18),使 應變能密度不可壓縮項Uincomp由平面剪力實驗之等效拉伸λP表示,再經式(2.20)之計算 對等效拉伸λP偏微分,便得到與平面剪力實驗相對應之等效應力式,可與實際平面剪力 實驗之應力應變數據做比對以決定參數項An與Bn。2.3 雙軸向實驗理論
雙軸向實驗與單軸向實驗最大的差異處,在於其受力平面上主軸應力有無限多組, 意即在雙軸向實驗中受力平面上不存在剪應力,由Mohr Stress Circle 的圖形來看該平面16 之受力狀況在主應力軸上縮為一點。正式雙軸拉力實驗需求的夾具設備特殊,製作不易 且很難尋得可借用之對象。針對這個情況,本研究設計一液壓膨脹實驗取得等效之雙軸 向實驗應力與應變,因此本節除了對一般雙軸拉力實驗理論做敘述外,也對液壓膨脹實 驗理論做簡便的介紹,液壓膨脹實驗應力應變式之詳細推導請見附錄C。
2.3.1 雙軸拉力實驗理論
一般而言,雙軸拉力實驗所用的試片有圓形與正方型兩種,雖然試片外型不同,但 除了截面積之算法外,所使用之應力與應變計算式皆相同[11]。本小節說明對象以原始 之直徑、厚度與變形前周緣截面積分別為D0、t0與A0的圓形試片為敘述對象,其示意 簡圖如圖2.2 所示。 圖2.2 雙軸拉力實驗 令λy與λx之方向構成受力平面,雙軸拉力實驗之應力狀態如式(2.29)所示: 0 0 0 00
x y t zP
σ = σ =
A =πD
σ =
A
, ,(2.29)
P為施在試片周圍之拉伸總力,又假設所實驗之材料為不可壓縮,即 λxλyλz=1,且雙軸拉17 力實驗在受力平面上各軸向受力相同而有無限多組主軸應力,此平面上任意方向拉伸可 視為主軸拉伸,其拉伸狀態可用下列式子表示: B 11 x λ =λ =λ
(2.30)
B 22 y λ =λ =λ(2.31)
( )
2 33 B 1 z λ λ λ = =(2.32)
λB為雙軸拉力實驗之等效拉伸,將式(2.26)到式(2.28)中之計算結果代回式(2.18),使 應變能密度不可壓縮項Uincomp由雙軸拉力實驗之等效拉伸λP表示,再經式(2.20)之計算 對等效拉伸λB偏微分,便得到與雙軸拉力實驗相對應之等效應力式,可與實際雙軸拉力 實驗之應力應變數據做比對以決定參數項An與Bn。2.3.2 液壓膨脹實驗理論
液壓膨脹實驗係為採用油體液壓進行之膨脹實驗(Bulging Test),經由對薄膜施加 均勻液壓,量得液體壓力值與薄膜膨脹高度,以方程式將原本數據由壓力單位與長度單 位轉換成應力與應變。此種實驗方法於1959 年首度由 J. W. Beams 提出[12],其可用來 測定薄膜之彈/塑性與時間依存性(Time Dependency)等機械性質,被廣泛地應用在 薄膜之材料性質檢測。 液壓膨脹實驗基礎理論係建立在當薄膜承受一均勻分布之側向液壓時,其變形狀況 近似於球體,故可將其視為一球殼並用數學式將液體壓力與薄膜膨脹高度換算為應力與 應變。其示意簡圖如圖2.3 所示,P 為內部液壓,R 為薄膜近似球體膨脹之半徑。18 圖2.3 液壓膨脹實驗示意簡圖 液壓膨脹實驗之應力σb如式(2.33)所示,但應變須分為兩個階段計算:第一階段為 薄膜膨脹高度h 小於初始平面圓半徑 R0,第二階段為薄膜膨脹高度h 大於初始平面圓半 徑R0,上述兩個階段之應變分別以εb1與εb2表示,假設在實驗過程中皆以近似球體之狀 態進行膨脹,則可寫為式(2.34)與式(2.35):
(
2 2)
0 b 0P h
R
4ht
σ
=
+(2.33)
(
2 2)
0 1 0 0 2 2 0 b1 0 sinh
R
2hR
R
2h
h
R
R
ε
− ⎧⎡ + ⎤⎡ ⎛ ⎞⎤ ⎫ ⎪ ⎪ ⎢ ⎥ ⎨ ⎢ ⎜ ⎟⎥ ⎬ ⎢ ⎥⎣ ⎝ ⎠⎦ ⎪⎣ ⎦ ⎪ ⎩ ⎭−
+
=
(2.34)
(
2 2) (
2 2)
1 0 0 0 0 2 2 0 b2 0 cosh
R
h
R
2hR
R
4h
2h
h
R
R
πε
− ⎧⎡ + ⎤ ⎡ + ⎛ ⎞⎤ ⎫ ⎪⎢ ⎥ ⎢+ ⋅ ⎥ ⎪ ⎨ ⎜ ⎟ ⎬ ⎢ ⎥ ⎢ ⎝ ⎠⎥ ⎪⎣ ⎦ ⎣ ⎦ ⎪ ⎩ ⎭−
+
=
(2.35)
P 為液壓膨脹壓力,R0為初始平面圓半徑,t0為試片初始厚度,h 為試片膨脹高度, 以上算式為假設試片在膨脹高度大時其變形狀況仍近似球體,詳細推導請見附錄C。19
2.4 簡易拉力實驗與平面剪力實驗
簡易拉力實驗與平面剪力實驗都屬於單軸向實驗,在實驗設備與規劃上皆有很高之 相似性,因此本研究結將兩個實驗歸在同一節做介紹。在材料實驗中,以簡易拉力實驗 最為普及,同時也有正式之實驗規範,本研究之簡易拉力實驗係參考ASTM(American Society for Testing Material,美國材料與試驗協會)實驗規範 D638 所建立,ASTM 實驗 規範D638 係針對塑膠材料所建立之標準實驗規範。而平面剪力雖無正式規範,但與簡 易拉力實驗有很高之相似性,因此同樣係參考ASTM 實驗規範 D638 建立。
2.4.1 實驗規劃
簡易拉力實驗與平面剪力實驗之試片規格如圖2.4 與圖 2.5 所示,簡易拉力實驗之 試片規格係參考ASTM 實驗規範 D638 中第四型非剛性體(Type IV,Nonrigid Plastic) 之試片規格,平面剪力實驗因夾具尺寸限制故設計為簡單之矩形試片。高分子材料因為 屬低強度之材料,正式實驗時應使用非接觸式測量系統如光學測位儀,量測試片之量規 區段(Gage Length)變化情況。但因此類器材成本偏高並且準備不易,而本研究之重點 主要目的為建立整體性之流程,在考慮到成本問題與研究目的之情況下,本研究在簡易 拉力實驗與平面剪力實驗中之拉伸位移數據以夾鉗間距(Grip Length)為依據。 圖2.4 (a)簡易拉力試片規格(b)簡易拉力實際試片 (a) (b)
20 圖2.5 (a)平面剪力試片規格(b)平面剪力實際試片 簡易拉力與平面剪力之實驗邊界條件皆採用等應變率拉,實驗所設定之主要參數有 施力精度、位移精度、拉伸應變率、總應變量與操作環境,如表2.1 所示。 表2.1 簡易拉力與平面剪力主要之實驗參數 簡易拉力實驗 平面剪力實驗 施力精度 解析度0.2 N 解析度1.5 N 位移精度 最小解析度0.01 mm 最小解析度0.01 mm 拉伸應變率 每分鐘增加1.0 每分鐘增加1.0 總應變量 達3.0 時停止實驗 達3.0 時停止實驗 操作環境 23 3 °C,50 5%相對溼度 23 3 °C,50 5%相對溼度
2.4.2 實驗設備
實驗設備之實際實驗情況如圖2.6 所示,其中平面剪力實驗在夾具另外內置墊片, 以提升夾具鎖附力減輕試片滑移問題。此微拉伸實驗機台為台灣弘達儀器公司所設計整 合,型號HT-9102,使用之荷重元(Load Cell)為日本 NMB 所生產,分為型號 U3B1-20K-B 之20 kg 荷重元,與本研究使用型號 U3B1-20K-B 之 200 kg 荷重元。21 圖2.6 (a)簡易拉力實驗(b)平面剪力實驗
2.4.3 實驗結果
在MSC.Marc 軟體中,針對建立超彈體模型所需要輸入之實驗數據為工程應力 (Engineering Stress)與工程應變(Engineering Strain)的材料曲線,因此本研究實驗結 果以應力與應變曲線表示之。根據鞋氣墊實際在進行吸震試驗時所估計之變形量,輸入 有限元素分析材料模型之數據以前段應變值小於1.5 之區段為主。簡易拉力與平面剪力 之實驗結果如圖2.7 所示,為從五次實驗數據取出三次差異最小者,圖中包含簡易拉力 與平面剪力差異最小之三次實驗數據。 然而需要注意的是,簡易拉力與平面剪力實驗進行時,在試片與夾鉗間會發生些許 滑移之現象,滑移情況又以平面剪力較為明顯,因此所測出之實驗結果之材料強度應略 低於實際之材料強度。 (a) (b)22 圖2.7 簡易拉力實驗結果與平面剪力實驗結果
2.5 液壓膨脹實驗
與一般之雙軸拉力實驗比起來,液壓膨脹實驗有兩項優勢:較低之整體建立成本, 同時所使用之機具結構亦較為簡便,各種操作如對心校準等皆較易進行;以及實驗中摩 擦力的影響極小,取得之材料性質將會更準確。因此,本研究選擇自行設計建立液壓膨 脹實驗取得等效雙軸應力應變數據。雖然目前液壓膨脹實驗並無可參考之實驗規範,但 本研究仍以ASTM 實驗規範 D638 為基礎,對液壓膨脹實驗參數做合理之設定。 液壓膨脹實驗之整體架構概念如圖2.8 所示,包含了夾具系統、液壓系統與閉迴路 控制系統之設計。夾具系統為實驗所使用之支架座,除試片座可固定試片與構成壓力腔 外,亦有支架組件固定試片座與位移量測系統,可對位移量測系統之中心點定位做微調 整以修正準確性。液壓系統包含了動力源油壓馬達與比例洩壓閥之設置等,主要係針對 實驗所需之油路概念做設計,如油路系統所需之配管規格或油路壓力限制之設定等。閉 迴路控制系統分為硬體與軟體部份,硬體部份係用於量測並產生類比訊號轉換為數位訊 號或是用以控制油路動作;軟體部份則為將轉換後的數位訊號重新整理成合理的資料,23 並透過即時應變式換算,決定控制油路動作該有輸出電壓值。 本研究簡略之液壓膨脹實驗建立流程介紹如圖2.9 所示,步驟依箭頭方向順序進行。 在動作概念確定之部份中,分別針對實驗之支架座各部件之相對位置、液壓系統油路需 求與閉迴路控制系統的運算邏輯做討論;接著將實驗會使用到的各種數值做計算以求得 所需之規格列表,如支架座合適的尺寸、液壓系統配管最高壓限或是閉迴路控制系統輸 出電流訊號所需串接之電阻等;規格列表建立完後,根據其所記載的限制,分別對各系 統作正式之設計,如夾具系統之正式三視圖,液壓系統之管線配接與閉迴路控制系統之 軟體編寫等;再將各設計完成之系統群作整合,進行實驗測試與各系統細節修正;最後 液壓膨脹實驗系統建立完成,進行正式液壓膨脹實驗取得材料數據。 圖2.8 液壓膨脹實驗整體架構概念 AD 資料擷取卡 LabVIEW 程式 動力源 油壓馬達 比例洩壓閥 控制器 實驗試片 電子式壓感計 電阻尺 壓力腔 試片座 液壓系統 夾具系統 閉迴路控制系統
24 圖2.9 液壓膨脹實驗建立流程
2.5.1 實驗規劃
液壓膨脹實驗試片規格如圖2.10(a)所示,紅色圈為作用範圍,圖 2.10(b)中實際試片 上所劃之線為標記中心用,以利位移測量設備之定位微調修正準確性。液壓膨脹實驗與 前節之實驗相同,因材料性質之原因,最好採用非接觸式之測量設備,然而在同樣的成 本與研究目的考量下,液壓膨脹實驗便選擇電阻尺作為位移量測設備。 圖2.10 (a)液壓膨脹試片規格(b)液壓膨脹實際試片 (a) (b)25 液壓膨脹實驗之各項實驗參數包含了壓力精度、位移精度、拉伸應變率、總應變量 與操作環境。與參照ASTM 實驗規範 D638 的簡易拉力及平面剪力不同,液壓膨脹採用 壓力精度量測,係因對應其施力端為油體液壓;參數中之位移精度係指電阻尺所量得之 膨脹高度,而應變之比照對象為採用式(2.34)與式(2.35)由原始試片半徑與膨脹高度所換 算出之等效應變,實驗參數如表2.2 所示: 表2.2 液壓膨脹主要之實驗參數 液壓膨脹實驗 壓力精度 解析度0.002MPa 位移精度 最小解析度0.01mm 拉伸應變率 每分鐘增加1.0 總應變量 達3.0 時停止實驗 操作環境 23 3°C,50 5%相對溼度 液壓膨脹實驗建立完後,標準之實驗作業流程分成三階段,即為初始階段、動作階 段與結束階段,流程規劃如圖2.11 所示: (1)在實驗初始階段,以夾具系統固定試片,校準電阻尺指向試片中心點。 (2)啟動油壓馬達使液壓系統開始空轉。 (3)開啟可程控電源供應器重設比例洩壓閥控制器,使比例洩壓閥關閉。 (4)切換油壓馬達三向閥使液壓系統之油體開始流動。 (5)實驗進入動作階段,啟動閉迴路控制系統。 (6)電子式壓感計與電阻尺透過放大器傳送類比訊號至 AD 資料擷取卡。 (7)AD 資料擷取卡將類比資料轉換為數位資料。 (8)透過程式內部已編寫好之方程式,計算壓力與應變式。 (9)判斷是否超過膨脹高度限制,同時將量測所得資料寫入數據列檔案。
26 (10)未超過膨脹高度限制,則繼續判斷應變率是否超過標準。 (11)根據上述判斷結果,透過可程控電源供應器調整比例洩壓閥控制器電壓。 (12)當試片膨脹達到閉迴路控制系統設定之最大高度時動作階段結束。 (13)實驗進入結束階段,提升比例洩壓閥控制器之電壓以關閉比例洩壓閥。 (14)切換三向閥使油壓馬達恢復空轉狀態後關閉油壓馬達運作。 (15)開啟油管末端之停止閥使油體回流油槽。 (16)關閉可程控電源供應器,使其內部記憶體資料清除重設。 (17)待已成球體之試片洩壓完畢,移除試片後實驗完成。 圖2.11 標準之實驗作業流程規劃
27
2.5.2 實驗設備
實驗設備之實際實驗情況如圖2.12 所示,實驗之主要部件位於圖(a)中右下方,圖(a) 中左側則為電腦控制端與LabVIEW 軟體之前端控制板面(Front Panel),而圖(b)為實際 實驗之膨脹狀況,膨脹高度約30mm,圖(c)與圖(d)為膨脹高度之對照圖。 圖2.12 (a)液壓膨脹實驗設備(b)實際實驗之膨脹狀況 (c)膨脹高度約 50 公厘(d)膨脹高度達 70 公厘 液壓膨脹實驗由夾具系統、液壓系統與閉迴路控制系統構成,此三組系統中各部件 彼此間作用關係如圖2.13 所示,圖中關係線之起點端連接作用者,箭頭端連接被作用者, 又關係線根據種類不同分空間幾何關係、油路關係與電系關係。實際在進行實驗各系統 設計階段中,依順序對夾具系統、液壓系統與閉迴路控制系統做設計;當三組系統主幹 完成後將其整合,再針對整合後的系統群作修正。本小節後續將分三個部份,依照實際 實驗設計建立的順序介紹夾具系統、液壓系統與閉迴路控制系統之設備相關資訊。 (c) (a) (b) (d)
28 圖2.13 系統群彼此間作用示意
2.5.2.1 夾具系統
夾具系統為用來固定液壓膨脹實驗中各部件之空間幾何關係,夾具系統主要分為三 部件,支架部件、總底座部件與試片座部件。支架部件可分為三組,即電阻尺支架組件、 試片座支架組件與電路板支架組件,其中電路板支架組件為固定配電用之簡易電路板; 總底座部件為固定所有組件相關位置之基座;試片座部件係用來固定試片,並使試片與 油體接觸面之周緣密封,進而建構出液壓膨脹實驗進行時可提供均勻液壓之壓力腔。試 片之固定方式係為先以試片上八個位置對稱之孔洞來定位試片,再由八根位置對稱之螺 絲穿過剩餘之孔洞,均勻施力鎖附使試片底下油體密封產生壓力腔。夾具系統實際成品 如圖2.14 所示,詳細尺寸規格請見附錄 D。29 圖2.14 夾具系統實際成品加上電阻尺與電路板
2.5.2.2 液壓系統
液壓系統為液壓膨脹實驗之動力源,通過油壓馬達組件輸出壓力完成使試片膨脹之 目的。液壓系統總共分為六部件,為油壓馬達、比例洩壓閥、可變節流閥、停止閥、過 濾器與配接之硬/軟管,油路設計示意如圖2.15 所示。 本研究液壓系統所使用之油壓馬達為所生產組件分成四部份,電動馬達、油壓幫浦、 儲油槽與手動式三向閥開關,而輸出液壓之流體媒介為中國石油公司出品的特級循環機 油CPC-R68;比例洩壓閥為美國 HydraForce 製造,最大輸入壓力為 34.5 bar,控制電壓 為0 到 12 V,其高頻脈動頻率達 250Hz,本研究用來控制油路流量;可變節流閥為配合 比例洩壓閥使用,施加一油路流通負載,使比例洩壓閥具備控制流量之能力;停止閥為 配接於管路最末端,在實驗初始階段為關閉狀態,當實驗進入結束階段時將其開啟以洩 掉膨脹試片內之流體;過濾器為用於濾清雜質,確保油體及油路之品質;整體油壓系統 的流體主要靠配接軟管接通,而部份與油路相關又必須固定之部件則以配接硬管接通, 如比例洩壓閥或電子式壓感計。30 圖2.15 油路設計示意圖
2.5.2.3 閉回路控制系統
閉迴路控制系統為控制液壓膨脹實驗進行與記錄數據之主幹,閉迴路控制系統分為 硬體部份與軟體部份。硬體部份包含AD 資料擷取卡、電阻尺、電阻尺放大器、電子式 壓感計、可程控電源供應器與比例洩壓閥控制器;軟體的部分則以LabVIEW 規劃實驗 程式,自行編寫之液壓膨脹實驗程式可為AD 端輸入、異常峰值過濾、應力與應變式換 算、判斷控制、DA 端輸出與數據文件編列等模組。 閉迴路控制系統硬體部份中,AD 資料擷取卡為美國 NI 公司所生產,型號 6024E, 可識別之類比訊號為電壓訊號,範圍為0 到 10 V,取樣速率達 200 kS/s。電阻尺為台灣 MyTech 公司製造,型號 RP-TR-100,有效行程 100 mm,精度達 0.01 mm,並透過電阻 尺放大器產生可識別之電壓訊號。電子式壓感為德國TECSIS 所生產,型號 3296,壓力 容許範圍為0 到 40 bar,精度達 0.002 MPa,透過壓力量測產生 4 到 20 mA 之電流訊號, 本研究將其跨過一顆490 Ω 之精密電阻產生可識別之電壓訊號。可程控電源供應器為台 灣固緯電子所生產,型號PSH-3610A,與電腦間通訊介面為 RS232,輸出電壓範圍 0 到31 36 V,精度可達 0.005 V。比例洩壓閥控制器為瑞士 WANDFLUH 所生產,型號 P02A012410,輸入電壓範圍 0 到 10 V,高頻脈動頻率調整範圍 60 到 250 Hz。 閉迴路控系統軟體部份中,以LabVIEW 為基礎系統規劃實驗程式,用視覺化之線 路圖介面來進行程式設計,閉迴路控制系統之前端控制板面(Front Panel)如圖 2.16 所 示,閉迴路控制系統之功能塊圖(Block Diagram)如圖 2.17 所示,其中所編寫之各模 組可分為以下部份簡介: (1) AD 端輸入模組:啟動 AD 資料擷取卡之軟體媒介,將外界之類比訊號轉讀 入後換為數位訊號,可設定每秒讀取資料數速率。 (2) 異常峰值過濾模組:可設定數值容許震盪範圍,以除去讀入資料中範圍震盪 過大的數據,同時也具備將過濾完成之資料重新分組平均的能力(如處理後 每秒兩百組數據分組平均為每秒十組數據)。 (3) 應力與應變式換算模組:主要由方程式功能塊組成,可將整理完後之電壓數 據換算成壓力與高度,當算出高度超過限制值時停止實驗,再根據膨脹原理 式(2.33)到式(2.35)換算出等效雙軸應力與雙軸應變值。 (4) 判斷控制模組:所使用之控制原理為微分控制,依據所量得並換算後之數據 資料,判斷所控制之液壓系統中比例洩壓閥是否升或降流量,再將可程控電 源供應器應調整的電壓值傳送到DA 端輸出模組。 (5) DA 端輸出模組:啟動可程控電源供應器之軟體媒介,透過 RS232 傳輸介面 改變可程控電源供應器之輸出電壓,而被輸入電壓端之比例洩壓閥控制器, 便根據輸入電壓大小來調整比例洩壓閥之流量。 (6) 數據文件編列模組:將資料寫入文件檔案之用,本研究預設輸出之檔案類型 為純文字(.txt)之數據列檔案。
32
圖2.16 閉迴路控制系統之前端控制面板
圖2.17 閉迴路控制系統之功能圖塊
33
2.5.3 實驗結果
液壓膨脹實驗之結果如圖2.18 所示,為從五次實驗數據取出三次差異最小者,圖中 包含差異最小之三次實驗數據,而數據曲線震盪係因油壓馬達出力不穩所致。從圖中很 明顯可以看出,列出之三次實驗數據雖然數據曲線震盪,但都有相同之趨勢,在應變值 超過約0.3 後,應力應變曲線出現下降的趨勢,此種應力應變曲線趨勢與正常之趨勢並 不吻合,針對此種情況本研究於下列二個小節討論實驗數據之合理性及數據上之修正方 式。 圖2.18 液壓膨脹實驗結果2.5.3.1 液壓膨脹之實驗數據合理性
圖2.19 中三條材料曲線分別為簡易拉力、平面剪力與液壓膨脹三種實驗所量得數據 之平均值,液壓膨脹之材料曲線在應變值到達約0.3 後與簡易拉力之材料曲線交錯。以 一般的物理論點來看有違常理,因為超彈體所需之三種實驗數據其應力應變曲線強度順 序應當為雙軸拉力>平面剪力>簡易拉力[11],如圖 2.20(a)所示。34 圖2.20(a)為 MSC.Marc 在大部分模擬分析範例中,超彈體材料模型所採用之三種實 驗數據。根據其技術文件與圖形曲線趨勢來看,MSC.Marc 所使用實驗之材質為橡膠, 機械性質近似本研究使用之聚醚型TPU,而其進行實驗之方式為採用一般雙軸拉力實驗 如圖2.20(b)所示。相較於 MSC.Marc 所附之實驗數據範本,本研究液壓膨脹實驗所取得 之等效雙軸應力應變,在應變值超過0.1 之趨勢來看已違背一般物理觀點,發生材料曲 線交錯之情況則更不合理。 圖2.19 本研究各項實驗數據之平均曲線 圖2.20 (a)MSC.Marc 所附之實驗數據(b)一般雙軸拉力實驗[13] (a) (b) (mm/mm) (MPa)
35
2.5.3.2 不合理因素與推測之材料曲線
本研究液壓膨脹實驗所量得之等效雙軸應力應變數據,會違背一般物理的觀點係推 論為兩大因素:第一個因素為所推定之球體假設膨脹無法適用大變形之情況,本研究推 導之液壓膨應力應變式推導,係在整體試片變形接近似於球體之條件下才成立,而從實 驗量得之數據可以推斷,等效應變超過0.1 後液壓膨脹實驗之變形就已經不能適用近似 於球體之條件;第二個因素則即為材料鬆弛特性(Relaxation)影響[14],因為液壓膨脹 實驗在等效應變超過0.1 後不適用所推導之應變換算式,每單位時間所產生的應變無法 滿足原本設定之應變率條件,材料鬆弛特性便使液壓膨脹實驗之應力應變曲線提早趨緩, 甚至出現反折。 考量到修整實驗成本問題與研究之目的,原本液壓膨脹實驗數據將取膨脹高度與壓 力數據,用在實驗之有限元素模擬中作為邊界條件以驗證材料模型正確性;而因為 MSC.Marc 所附橡膠材料之機械性質近似於本研究使用之聚醚型 TPU,所以參考其材料 範例如圖2.20(a),以該範例簡易拉力實驗數據與雙軸拉力實驗數據之比例值為根據,再 用數值計算軟體MATLAB 對本研究之簡易拉力實驗之應力數據做換算,建立雙軸拉力 實驗推測之材料曲線,其建立流程如圖2.21 所示,詳細推導請見附錄 E。 取本研究液壓膨脹實驗數據應變值小於0.1 為初始趨勢,以 MSC.Marc 所附材料範 利算出之數據比例值將本研究簡易拉力實驗數據做計算,可得到如圖2.22 所示雙軸拉力 實驗推測之曲線(虛線者),其初始趨勢與本研究液壓膨脹實驗數據吻合。而使用此材 料應力應變曲線之超彈體模型,將透過液壓膨脹實驗之有限元素模擬來驗證其準確性與 合理性。36
圖2.21 推測之材料曲線建立流程
圖2.22 本研究原實驗數據與推測之材料曲線
37
第三章 材料模型驗證
3.1 Mooney-Rivlin 材料模型建立
本章將對五參數項之三階Mooney-Rivlin 超彈體方程式進行計算並討論,以建立有 限元素分析之超彈體材料模型。將各項實驗數據輸入MSC.Marc 後利用資料擬合(Data Fit)功能,計算出三階 Mooney-Rivlin 超彈體方程式之五參數項數值;以自行編寫之 MATLAB 程式對各參數項做不同調整後,列出其對超彈體模型之簡易拉力、平面剪力 與雙軸拉力應力應變曲線所產生之影響趨勢進行討論;最後分別以調整前與調整後的參 數項為材料模型參數,進行液壓膨脹實驗之有限元素模擬,根據模擬結果決定合適之參 數項數值。Mooney-Rivlin 材料模型建立流程如圖 3.1 所示: 圖3.1 Mooney-Rivlin 材料模型建立流程38 參照附錄B 之算式推導,三階 Mooney-Rivlin 超彈體方程式經過不同之等效拉伸 λT、 λP與λB偏微分後,分別得到等效應力σT、σP與σB,可寫為下列式: T 2 3 T T 2 T 2 2 T T 3 T T T T 2 2 2 T T 2 T T 2 T T T T T T 2 2 C10 2 C01 2 2 1 2 2 C11 2 2 3 3 2 4 2 2 2 C20 2 6 2 C30 3 3 2 λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ
U
σ
λ
⎡ − ⎤+ ⎡ − ⎤ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎡⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞⎤ + ⎢⎜ − ⎟⎜ + − ⎟ ⎜+ + − ⎟⎜ − ⎟⎥ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎣ ⎦ ⎡ ⎤ ⎡⎛ ⎞⎛ ⎞⎤ ⎛ ⎞ ⎛ ⎞ + ⎢⎜ + − ⎟⎜ − ⎟⎥+ ⎢ ⎜ + − ⎟ ⎜ − ⎟⎥ ⎝ ⎠⎝ ⎠ ⎢ ⎝ ⎠ ⎝ ⎠⎥ ⎣ ⎦ ⎣ ⎦∂
=
∂
=
(3.1)
2 P 3 P 3 2 P P 3 P P P P 2 2 2 P P P P 2 3 3 P P P P P P 2 2 2 2 C10 2 C01 2 C11 2 4 2 2 2 1 2 C20 2 4 2 C30 3 2 2 λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ U σ λ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎛ ⎞⎛ ⎞ − + − + ⎢ + − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎡ ⎤ ⎡⎛ ⎞⎛ ⎞⎤ ⎛ ⎞ ⎛ ⎞ + ⎢⎜ + − ⎟⎜ − ⎟⎥+ ⎢ ⎜ + − ⎟ ⎜ − ⎟⎥ ⎝ ⎠⎝ ⎠ ⎢ ⎝ ⎠ ⎝ ⎠⎥ ⎣ ⎦ ⎣ ⎦ ∂ = ∂ =(3.2)
3 B 5 B 3 B B 4 2 3 B 5 2 B 4 B B 3 B B B B 2 2 2 B B B B 4 5 4 5 B B B B B B 2 2 C10 2 C01 2 2 2 1 2 C11 2 3 2 3 2 1 4 1 2 C20 2 3 4 C30 3 2 3 2 λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ λ U σ λ ⎡ ⎤ ⎡ ⎤ − + − ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎡⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞⎤ + ⎢⎜ − ⎟⎜ + − ⎟ ⎜+ + − ⎟⎜ − ⎟⎥ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎣ ⎦ ⎡ ⎡⎛ ⎞⎛ ⎞⎤ ⎛ ⎞ ⎛ ⎞ + ⎢⎜ + − ⎟⎜ − ⎟⎥+ ⎢ ⎜ + − ⎟ ⎜ − ⎟ ⎝ ⎠⎝ ⎠ ⎢ ⎝ ⎠ ⎝ ⎠ ⎣ ⎦ ⎣ ∂ = ∂ = ⎤ ⎥ ⎥⎦(3.3)
上述式(3.1)到式(3.3)中之 C10、C01、C11、C20 與 C30 即為三階 Mooney-Rivlin 超 彈體方程之五參數項,可由這些參數項決定Mooney-Rivlin 超彈體材料模型承受簡易拉 力、平面剪力與雙軸拉力時之應力應變曲線。39
3.1.1 絕對誤差與相對誤差計算
在MSC.Marc 中,用來處理實驗數據之資料擬合功能係以最小平方誤差來計算,其 計算方式分為兩種:根據絕對誤差ηabs(Absolute Error)作為判斷來進行計算,絕對誤
差之算法如式(3.4)所示;根據相對誤差 ηrel(Relative Error)作為判斷來進行計算,絕對
誤差之算法如式(3.5)所示。 2 n i abs i i 1 η
ξ
ζ
⎛ ⎞ ⎜ ⎟ ⎝ ⎠ =∑
−(3.4)
(
)
2 n abs i i i η =∑
ζ ξ
−(3.5)
n 為數據之資料數,ζi為計算出之等效應力,ξi為實驗之等效應力,兩者具有對應 且相等之等效應變值。本研究之實驗數據輸入MSC.Marc,經由資料擬合功能計算出兩 種參數值組合,參數組合數值如表3.1 所示,其所對應之超彈體材料模型承受簡易拉力、 平面剪力與雙軸拉力之應力應變曲線如圖3.2 所示。 表3.1 MSC.Marc 所計算之三階 Mooney-Rivlin 參數項 根據絕對誤差判斷 根據相對誤差判斷 C10 2.26309 2.38845 C01 0.937832 0.723934 C11 -0.113397 -0.082037 C20 -0.308564 -0.318723 C30 0.0396949 0.037914840 圖3.2 (a)根據絕對誤差計算之三階 Mooney-Rivlin 超彈體材料模型 (b)根據相對誤差計算之三階 Mooney-Rivlin 超彈體材料模型 當超彈體材料模型之三種應力應變曲線中任一條發生切線斜率小於零之情況,即應 力應變曲線有反折,則此超彈體材料模型在進行有限元素模擬時,易有過度變形之情況 而導致模擬不穩定。比對圖3.2 中兩組超彈體材料模型之應力應變曲線,本研究決定選 擇根據絕對誤差所計算出之參數值為調整對象。 (a) (b)