國
立
交
通
大
學
土木工程學系
碩
士
論
文
軸對稱板於彈性基礎上受任意載重之研究
Axisymmetric Plate on Elastic Foundation Subjected to
Arbitrary Loading
研 究 生:林宗輝
指導教授:劉俊秀 教授
中 華 民 國 九 十 九 年 九 月
軸對稱板於彈性基礎上受任意載重之研究
Axisymmetric Plate on Elastic Foundation Subjected to Arbitrary
Loading
研 究 生:林宗輝 Student:Zong-Huei Lin 指導教授:劉俊秀 Advisor:Gin-Show Liou 國 立 交 通 大 學 土木工程學系 碩 士 論 文 A ThesisSubmitted to Institute of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Institute of Civil Engineering Sep 2010
Hsinchu, Taiwan, Republic of China
軸對稱板於彈性基礎上受任意載重之研究
研究生:林宗輝 指導教授:劉俊秀 博士 國立交通大學土木工程學系摘要
推導軸對稱彈性薄板於彈性基礎上受任意分佈荷重下之外力-變位關係式。 此荷重在角方向以傅立葉級數之諧和函數展開,並假定各展開項之荷重強度為沿 半徑方向呈分段線性。以彈性薄板理論及分段線性荷重形狀函數,解此板之動力 位移。 動力分析之模式,係由運動方程是經解析得一含 Bessel function 的變位函數。 再藉板之邊界條件推衍得頻率方程式,進而求得頻率參數,再得板之自然頻率。 後依振態疊加法推導成廣義荷重及廣義質量,並於廣義荷重中引入分段線性荷重 形狀函數轉換。此微分方程得一解,即為任意分佈荷重下之外力-變位關係式。 上述推導之外力-變位關係式,皆與以有限元素法所得之解相互比較,並印 證之。Axisymmetric Plate on Elastic Foundation Subjected to
Arbitrary Loading
Student: Zong-Huei Lin
Advisor: Prof.Gin-Show Liou
Institute of Civil Engineering College of Engineering National Chiao Tung University
Abstract
Presented is the displacement field of axial symmetric plate on elastic foundation subjected to arbitrary loading. In the derivation, the arbitrary loading can be expressed as Fourier series in θ-direction and piecewise linear distribution in r-direction of cylindrical coordinates.
To obtain the displacement field, the modal shapes and respective frequencies of the system are solved first. Then, the technique of superposition is employed to obtain the displacement field due to arbitrary loading. The analytical solution of the presented method has been compared with the result of finite element method for some simple cases. The comparison shows the presented method is accurate and efficient.
誌謝
當碩士論文寫到此頁,則代表我的碩士生涯要正式落幕了,二年的研究所時 光看似漫長,實則如過眼雲煙轉瞬即逝。人生的美好不在於延續生命的永恆不滅, 而在於瞬間璀璨所散發出來的繽紛光芒,雖然二年時間匆匆而逝,但已在我的人 生之中留下許多不可磨滅的奪目光采。首先最要感謝的人是劉俊秀老師,從入學, 整整二年寒暑從未間斷的辛勤教導,吾以為學如逆水行舟,而老師則像是裝在舟 上的電動馬達,帶我一路勇往直前奮力不倦,不僅於課業上給予指導,更教曉我 做人做事的態度,如今輕舟已過萬重山,老師對我的照顧及付出,點滴在心,無 限感激!另外,要感謝口試委員黃炯憲教授、鄭復平教授所提供之寶貴意見。於 交大土木結構組的研究團隊中,要感謝眾學長與學弟妹的幫助與鼓勵。特別感謝 我的家人,如不是你們一直以來的包容及支持,我也不可能有今天的小小成就。 最後,要感謝的人實在太多,如有被遺忘的朋友在此亦一併感謝,感謝大家於這 二年來對我的照顧。有些人的碩士生涯過的如黑白像片般愁雲慘淡,但我的碩士 生涯用資訊豐富的高光譜影像來描述亦不為過,在此也祝福所有還在學的朋友們 都能夠在求學的路上綻放出各式各樣的光芒!目錄
中文摘要 ……… iii 英文摘要 ……… iv 誌謝 ……… v 目錄 ……… vi 表目錄 ……… ix 圖目錄 ……… x 符號說明 ……… xii 一、 緒論……… 1 1.1 前言……… 1 1.2 文獻回顧……… 1 1.3 研究動機……… 2 二、 彈性基礎上環狀板於分段線性荷重之動力反應推導……… 3 2.1 概論……… 3 2.2 分析方法……… 4 2.3 軸對稱環狀板……… 9 2.3.1 前言……… 9 2.3.2 邊界條件……… 9 2.3.3 振態疊加法……… 16 2.3.4 外力-變位的關係式……… 18 頻率方程式求根……… 192.4.1 Bracketing Method……… 19 2.4.2 Open Method……… 19 2.4.3 應用求解……… 20 三、 實例分析 (振態)……… 22 3.1 前言……… 22 3.2 ANSYS 介紹……… 22 3.2.1 ANSYS 分析步驟……… 22 3.3 頻率參數……… 23 3.4 自然頻率……… 24 3.5 振態……… 26 3.5.1 情況一之振態(環狀板內板為固定端,外板為自由端)…… 27 3.5.2 情況二之振態(環狀板內板為自由端,外板為簡支承)…… 31 3.5.1 情況三之振態(環狀板內板為固定端,外板為固定端)…… 35 四、 實例分析 (變位)……… 39 4.1 前言……… 39 4.2 ANSYS 數值結果與動力反應推導之比較……… 39 4.2.1 均佈荷重……… 40 4.2.2 線性遞減荷重……… 47 4.2.3 線性遞增荷重……… 54
4.2.4 Sine Shape 荷重……… 61
五、 結論與建議……… 68
5.1 結論……… 68
5.2 建議……… 68
表目錄
表 1. 頻率參數值(情況一)... 24 表 2. 頻率參數值(情況二)... 24 表 3. 頻率參數值(情況三)... 24 表 4. Analytical Solution 之自然頻率(情況一) ... 25 表 5. Analytical Solution 之自然頻率(情況二) ... 25 表 6. Analytical Solution 之自然頻率(情況三) ... 25 表 7. ANSYS 之自然頻率(情況一) ... 25 表 8. ANSYS 之自然頻率(情況二) ... 25 表 9. ANSYS 之自然頻率(情況三) ... 26圖目錄
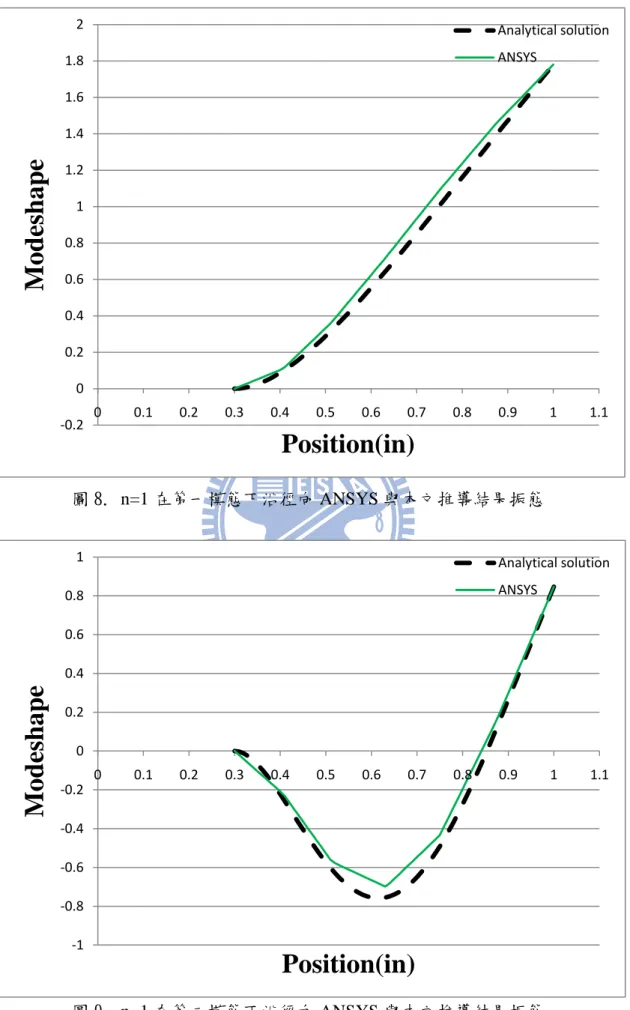
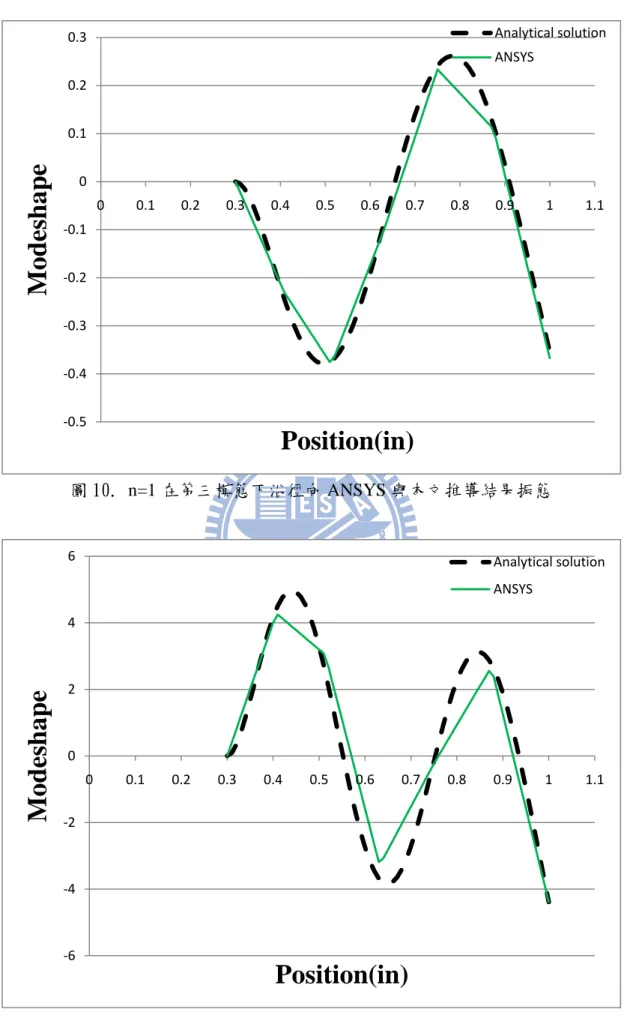
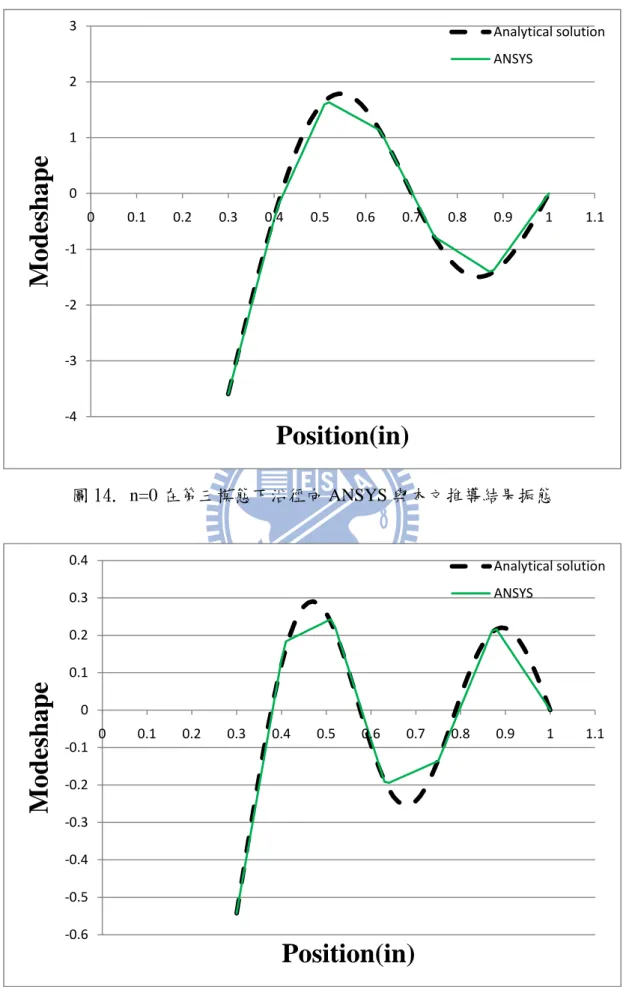
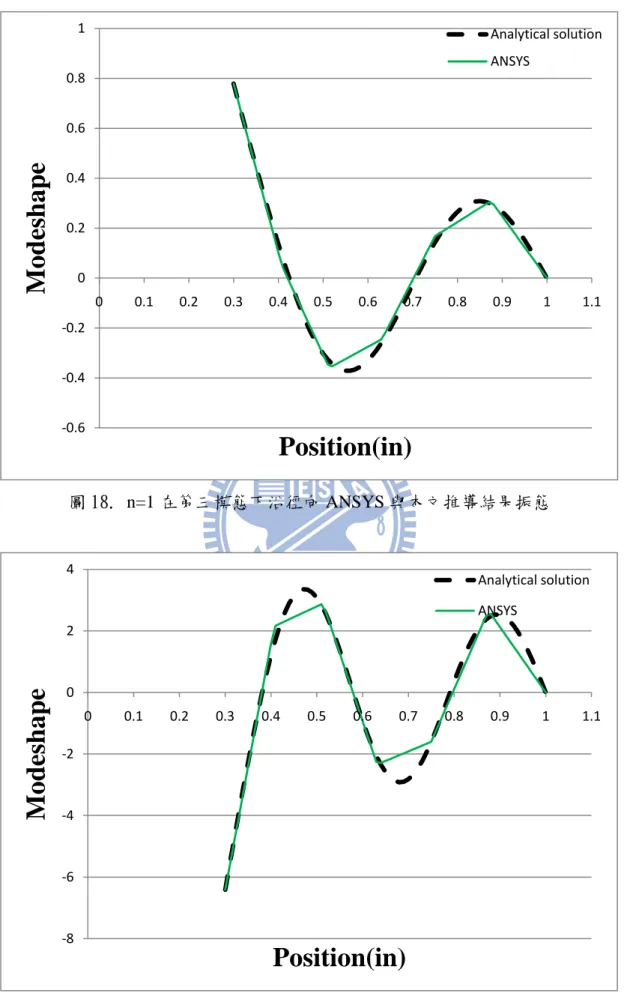
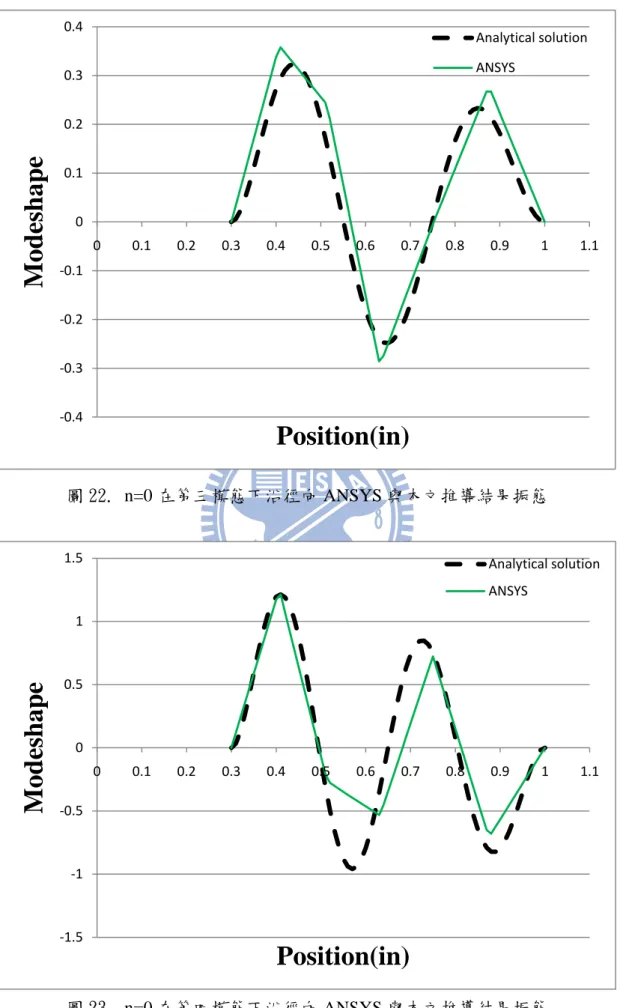
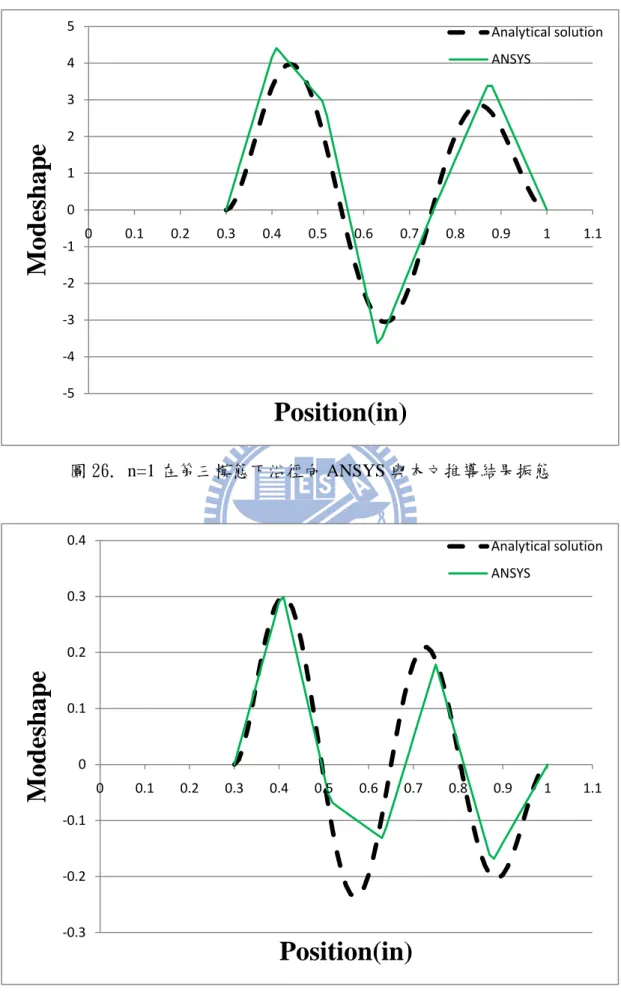
圖 1. 環狀板內板為固定端,外板為自由端... 9 圖 2. 環狀板內板為自由端,外板為簡支承... 10 圖 3. 環狀板內板為固定端,外板為固定端... 11 圖 4. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 27 圖 5. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 27 圖 6. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 28 圖 7. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 28 圖 8. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 29 圖 9. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 29 圖 10. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 30 圖 11. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 30 圖 12. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 31 圖 13. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 31 圖 14. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 32 圖 15. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 32 圖 16. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 33 圖 17. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 33 圖 18. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 34 圖 19. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 34 圖 20. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 35 圖 21. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 35 圖 22. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 36 圖 23. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 36 圖 24. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 ... 37 圖 25. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 ... 37 圖 26. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 ... 38 圖 27. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 ... 38 圖 28. 均佈荷重示意圖... 40 圖 29. 均佈荷重下,ANSYS 與本文推導結果變位(情況一) ... 41 圖 30. 均佈荷重下,ANSYS 與本文推導結果變位(情況一) ... 42 圖 31. 均佈荷重下,ANSYS 與本文推導結果變位(情況二) ... 43 圖 32. 均佈荷重下,ANSYS 與本文推導結果變位(情況二) ... 44 圖 33. 均佈荷重下,ANSYS 與本文推導結果變位(情況三) ... 45 圖 34. 均佈荷重下,ANSYS 與本文推導結果變位(情況三) ... 46 圖 35. 線性遞減荷重示意圖... 47圖 36. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況一) ... 48 圖 37. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況一) ... 49 圖 38. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況二) ... 50 圖 39. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況二) ... 51 圖 40. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況三) ... 52 圖 41. 線性遞減荷重下,ANSYS 與本文推導結果變位(情況三) ... 53 圖 42. 線性遞增荷重示意圖... 54 圖 43. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況一) ... 55 圖 44. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況一) ... 56 圖 45. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況二) ... 57 圖 46. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況二) ... 58 圖 47. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況三) ... 59 圖 48. 線性遞增荷重下,ANSYS 與本文推導結果變位(情況三) ... 60 圖 49. Sin shape 荷重示意圖 ... 61
圖 50. Sin shape 荷重下,ANSYS 與本文推導結果變位(情況一) ... 62
圖 51. Sin shape 荷重下,ANSYS 與本文推導結果變位(情況一) ... 63
圖 52. Sin shape 荷重下,ANSYS 與本文推導結果變位(情況二) ... 64
圖 53. Sin shape 荷重下,ANSYS 與本文推導結果變位(情況二) ... 65
圖 54. Sin shape 荷重下,ANSYS 與本文推導結果變位(情況三) ... 66
符號說明
a:彈性環狀板之外徑 b :彈性環狀板之內徑 h :彈性環狀板之厚度 n:富立葉展開的第個項 ω:彈性環狀板之自然頻率 ρ:彈性環狀板之比重量 K:彈性環狀板之基礎彈性模數 :彈性環狀板之頻率參數 ( , , ) zz u r t :彈性環狀板之總變位 r,θ,t, z :圓柱座標系統之軸 W(r,θ) :彈性環狀板之振態 D:彈性環狀板之撓曲剛度(flexural figidity) E:彈性環狀板之彈性模數 :彈性環狀板之卜森比(poisson ratio) n zz σ : 第個富立葉展開項之正向應力(normal stress) n zr: 第個富立葉展開項之剪應力(shear stress) n z : 第個富立葉展開項之剪應力(shear stress) I : 第一類修正型貝索(bessel)函數n J : 第一類貝索(bessel)函數 n K : 第二類修正型貝索(bessel)函數 n Y : 第二類貝索(bessel)函數
第一章
緒論
1.1 前言
隨著近代科技的發展,電腦輔助能力與日俱增,土木施工技術不斷改進,因 此各種巨積結構體,如海域鑽油平台、雷達站的基礎、核電廠圍阻體、拱壩等, 日漸增多。而在傳統的結構動力分析中,將基礎假設固定於岩盤之上,意謂試土 壤介質為剛性體,此與土壤的實際物理性質,顯然相去甚遠,並不足以模擬土壤 對結構物的影響。是以,對此類巨積結構物處於地震動力狀態時,土壤介質與結 構物間的交互作用,已廣泛引起工程界的重視與探討。然而在早期的研究中,對 土壤-結構物互制問題,均局限於假設基礎為一剛性體,置於彈性(elastic)或黏彈 性(visco elastic)半平面的土壤介質之上。於上述假設前提下,並無須顧慮基礎的 柔度(flexibility)對其動力反應的效應,但於後來對實際建築結構物所做的動力試 驗,發現基礎具有相當非共平面(out of plane)的變位,因此,於土壤-結構物互 制研究課題中,彈性基礎的影響成了不可或缺的考慮因素。而在引入基礎的柔度 物理特性,也就是求取基礎的外力-變位關係式,所以,本文係針對軸對稱彈性 薄板的基礎模式,就考慮慣性力之動力反應,在對外力荷重做一基本假設前提下, 加以推導,並與有限元素法套裝軟體來相互驗證。1.2 文獻回顧
從結構力學領域中,平板結構體甚早即受重視及研究,但僅始於自由振動下 之實驗。於 1766 年 Euler[1]首度提出以數學方法,企圖對平板問題之變位行為加 以描述。此後歷經 J.Bernoulli[2];Jr’Sophie Germain;Lagrange;Navier 等加以 推衍或修正,及至 Kirchhoff[3],進一步同時考慮板的彎曲及伸展特性,並發現 平板的頻率方程式和提出以虛位移法(virtual displacement methods)求解平板問 題。 關於 Kirchhoff 所提薄板理論: (1) 薄板之厚度 h 比薄板其他尺寸為小。 (2) 薄板中性面的撓度 w 比薄板之厚度 h 小。 基於上述兩個主要假定,可推論以下結果,做為薄板理論簡化的根據。 (1) 薄板的厚度,於變形後的變化可略去不計。 (2) 薄板內部平行於中性面的平面應力,沿著厚度之積分總值(即薄板張力) 可略去不計。(3) 薄板中,垂直於中性面的法線,變形後仍為中性面之法線。 (4) 在考慮平衡方程時,薄板乃做為一個平板看待。 此後,求解薄板問題,大抵以前述為依歸。而在求解平板問題中,外力-變 位的關係式,隨著電腦的出現,大量發展出許多數值方法(如有限元素法)以模擬 外力荷重分佈函數,及平板之幾何形狀。本文係針對軸對稱薄板置於彈性基礎所 受任意外力荷重做一基本假設,並因而提出一形狀函數(shape function),以求得 外力-變位的關係式。
1.3 研究動機
按過去之研究,關於軸對稱薄板的外力-變位關係式,在解析解方面,僅能 處理簡單荷重分佈函數。另一方面,利用數值模式所使用之有限元素法或有限插 分法,必須先將平板問題加以劃分網格(mesh),較缺乏效率。是以本文中,利用 軸對稱薄板所得之解析解,並藉對外力荷重分佈函數於節點間為一線性變化的基 本假設,加以推導印證。於文中,包括垂直變位(vertical translation),翻轉(rocking) 等,進而在考慮動力模式下,引進板之慣性力,求得軸對稱彈性薄板置於彈性基 礎上的動力反應。並以三種邊界條件(boundary condition),加以探討。第二章 彈性基礎上環狀板於分段線性荷重之動力反應推導
2.1 概論
本章推導環狀平板置於彈性半平面之界面模式中,彈性板的動力反應分析。 亦即於運動方程式中,須考慮慣性力(inertia force),以求軸對稱環型薄板之外力 -變位關係式。因此,引用彈性薄板置於彈性基礎上之動力模式控制方程式,並 以圓柱座標系統表之。 ) , , ( ) , , ( ) , , ( ) , , ( ) 1 1 )( 1 1 ( 2 2 2 2 2 2 2 2 2 2 2 2 t r q t r u t h t r Ku t r u r r r r r r r r D zz zz zz (2. 1) ) , , ( ) , , ( ) , , ( ) , , ( 2 2 2 2 t r q t r u t h t r Ku t r u D zz zz zz (2. 2) 其中 ) , , ( ) , , (r t wr t uzz (2. 3) ) 1 1 ( 2 2 2 2 2 2 r r r r (2. 4) 於uzz(r,,t)中,w(r,,t)表沿板邊緣所計算的位移函數。 由上述各式,經整理可得 ) , , ( ) , , ( ) , , ( ) , , ( 2 2 2 2 t r q t r w t h t r Kw t r w D (2. 5) 於上式中,係將板緣之振動函數(r,,t)視作有效外力(Peff )。 而由參考文獻中,對位於層狀介質上之任意已知應力,以無限多項的傅立葉 級數(Fourier series)依角度展開得以下形式:
0 ] sin cos ) ( [ )] , ( [ ) , , ( n iwt iwt e n n r q e r q t r q ; bra (2. 6)2.2 分析方法
假設除了彈性平板的板面外,無表面應力作用於其上,且於推導過程中,將 板於徑向方位視作剛性,亦即無共平面(in-plane)方向之變位,此外板下之剛性變 位為可任意指定的。則於 Z=0 之邊界上 (1) 垂直擾動(Vertical excitation),指振態 n = 0 ) , , ( ) , , ( 0 0 t r w t r uzz ; br a (2. 7) 0 ) , , ( 0 t r zz ; r a , rb (2. 8) 0 ) , , ( ) , , ( 0 0 t r t r z zr ; 0r (2. 9) (2)翻轉擾動(Rocking excitation),指振態 n = 1 ) , , ( ) , , ( 1 1 t r w t r uzz ; br a (2. 10) 0 ) , , ( 1 t r zz ; ra , rb (2. 11) 0 ) , , ( ) , , ( 1 1 t r t r z zr ; 0r (2. 12) (3)對振態 n > 1 ) , , ( ) , , (r t w r t un n zz ; bra (2. 13) 0 ) , , (r t n zz ; r a , rb (2. 14) 0 ) , , ( ) , , (r t n r t z n zr ; 0r (2. 15) 於動力反應分析中,概分為二種情況:(1)分佈參數系統的振態疊加分析。 (2)分離座標系統的振態疊加分析。 而於分佈參數系統之振態疊加分析中,只要振態與頻率求出,就可完全與分 離座標系統相同。因此,二者均以各振態反應分量之振幅,作為定義結構物反應 的廣義座標系統。然而,原則上,在分佈參數系統中,因具有無限多個振態,故 此種座標有無限多個,但實際上只有那些對反應有顯著作用的振態才需考慮,故 本文轉化成分離參數形式,用有限個數振態(正規)座標來描述對稱彈性薄板的動 力反應。 分佈參數系統的動力反應振態分析,與分離座標系統的振態分析步驟相同, 大抵可歸納為如下之步驟: 1. 計算振態與頻率。 2. 計算廣義質量與荷重。 3. 解正規座標或分離座標反應方程式。 4. 計算變位反應。 基於上述分析步驟,本文藉以推導軸對稱彈性薄板之外力-變位關係式。因 此,對彈性薄板的自由振動運動方程式 0 ) , , ( ) , , ( ) , , ( 2 2 2 2 w r t t h t r Kw t r w D (2. 16) 首先,採用分離變數法(separation of variables),並假設變位函數的形式為 ) ( ) , ( ) , , (r t W r Y t w ,亦即此自由振動運動包含一形狀不變的振態W(r,),而 其振幅隨時間成Y(t)的變化。如是代入運動方程式中 0 ) ( ) , ( ) ( ) , ( ) ( ) , ( 2 2 2 2 W r Y t t h t Y r KW t Y r W D (2. 17) 將變數分離
) ( ) , ( ) ( ) , ( ) ( ) , ( 2 2 2 2 t Y r W t h t Y r KW t Y r W D (2. 18) 2 '' 2 2 ) ( ) ( ) , ( ) , ( ) , ( t Y t Y r hW r KW r W D (2. 19) 整理可得 0 ) , ( ) , ( ) , ( 2 2 2 W r KW r hW r D (2. 20) 其中,頻率參數與自然頻率之關係式 D K D h 2 4 (2. 21) 則得 0 ) , ( ) (4 4 W r (2. 22) 0 ) , ( ) )( (22 2 2 W r (2. 23)
由於線性微分方程之原理(linear differential equations),上式的完整解可由疊 加法獲得 0 ) , ( ) , ( 0 ) , ( ) , ( 2 2 2 2 1 2 1 2 r W r W r W r W (2. 24) 再將W(r,)對做傅立葉轉換(Fourier transform)
0 ' 0 sin ) ( cos ) ( ) , ( n n n n r n W r n W r W (2. 25) 其中 n 表傅立葉展開之第 n 個項 代回可得 0 sin ) ( sin ) ( 0 cos ) ( cos ) ( 0 sin ) ( sin ) ( 0 cos ) ( cos ) ( ' 2 2 ' 2 2 2 2 2 2 ' 1 2 ' 1 2 1 2 1 2 n r W n r W n r W n r W n r W n r W n r W n r W n n n n n n n n (2. 26) 其中 ( 1 1 2) 2 2 2 2 2 r r r r 代入上式 0 sin ) ( sin ) ( 1 sin ) ( 1 sin ) ( 0 cos ) ( cos ) ( 1 cos ) ( 1 cos ) ( 0 sin ) ( sin ) ( 1 sin ) ( 1 sin ) ( 0 cos ) ( cos ) ( 1 cos ) ( 1 cos ) ( ' 2 2 ' 2 2 2 2 ' 2 ' 2 2 2 2 2 2 2 2 2 2 2 2 2 ' 1 2 ' 1 2 2 2 ' 1 ' 1 2 2 1 2 1 2 2 2 1 1 2 2 n r W n r W r n r W r r n r W r n r W n r W r n r W r r n r W r n r W n r W r n r W r r n r W r n r W n r W r n r W r r n r W r n n n n n n n n n n n n n n n n (2. 27) 化簡能得 0 ) ( ) ( ) ( 1 ) ( 0 ) ( ) ( ) ( 1 ) ( 0 ) ( ) ( ) ( 1 ) ( 0 ) ( ) ( ) ( 1 ) ( ' 2 2 2 2 ' 2 ' 2 2 2 2 2 2 2 2 2 2 2 ' 1 2 2 2 ' 1 ' 1 2 2 1 2 2 2 1 1 2 2 r W r n r W r r r W r r W r n r W r r r W r r W r n r W r r r W r r W r n r W r r r W r n n n n n n n n n n n n (2. 28) 作 Bessel function 轉換 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ' 2 ' 1 ' 2 2 1 2 ' 4 ' 3 ' 1 4 3 1 r Y A r J A r W r Y A r J A r W r K A r I A r W r K A r I A r W n n n n n n n n n n n n n n n n n n n n (2. 29) 最後將上式代入
0 ' 0 sin ) ( cos ) ( ) , ( n n n n r n W r n W r W (2. 30) 則可得一含貝索函數(Bessel function)之函式
0 4 3 2 1 ( ) ( ) ( ) ( )}cos { ) , ( n n n n n n n n nJ r A Y r A I r A K r n A r W
0 ' 4 ' 3 ' 2 ' 1 ( ) ( ) ( ) ( )}sin { n n n n n n n n nJ r A Y r A I r A K r n A (2. 31) 而上式中的八個係數A ;kn ' kn A ,k = 1 , 2 , 3 , 4 定義了板振動時的形狀與振 幅,再由板邊緣的邊界條件,可得一頻率方程式,並可藉以解出頻率參數nm, 進而求得自然頻率nm。其中Wn(r,)具有cosn及sinn,因二者具有類似之週 期特性,故以下僅就cosn加以推導。 此外於計算廣義荷重時,原則上可直接應用於任意分佈荷重函數,但為能有 效運用於土壤-結構物互制機制之研究課題中,故本文基於參考文獻,對任意分 佈荷重建立其對每個傅立葉展開項的荷重強度為沿徑向分段線性(Piecewise Linear)的基本假設,即 p h q r h q r h q r h r q s sn T n s j n j j
) ( ) ( ) ( ) ( 0 0 1 1 (2. 32) 其中 n : 表傅立葉展開之第n個項。 s : 表板區分成s個區間。 T h : 表由hj所組成之[1(s1)]向量函數。 p: 表由qj所組成之[(s1)1]向量。 0 ; 1 0 , , ; 1 , , ) ( 1 1 1 1 1 1 s j r r r for r r r r s j r r r for r r r r r h j j j j j j j j j j j (2. 33) 鑑於上述結論與假設,以下就軸對稱環狀板加以推導。
2.3 軸對稱環狀板
2.3.1 前言
由彈性薄板於自由振動之運動控制方程式,經分離變數法得 A J r A Y r A I r A K r n r Wn( , ){ 1n n( ) 2n n( ) 3n n( ) 4n n( )}cos n0,1,2,... (2. 34)2.3.2 邊界條件
本文就三種邊界條件情況之環狀板加以推導 情況一:b
a
圖 1. 環狀板內板為固定端,外板為自由端(i) 內板之邊緣為固定端,則 r = b 處的變位為零。 0 )] , ( [Wn r rb (2. 35) (ii) 內板之邊緣為固定端,則 r= b 處的轉角為零。 0 ) , ( b r n r r W (2. 36) (iii) 外板之邊緣為自由端,則 r = a 處的徑向彎矩為零。 0 ) (Mr ra (2. 37) (iv) 外板之邊緣為自由端,則 r = a 處的剪力為零。 0 a r rt r r M Q V (2. 38) 情況二:
b
a
圖 2. 環狀板內板為自由端,外板為簡支承 (i) 內板之邊緣為自由端,則 r = b 處的徑向彎矩為零。 0 ) (Mr rb (2. 39)(ii) 內板之邊緣為自由端,則 r = b 處的剪力為零。 0 b r rt r r M Q V (2. 40) (iii) 外板之邊緣為簡支承,則 r = a 處的徑向彎矩為零。 0 ) (Mr ra (2. 41) (iv) 外板之邊緣為簡支承,則 r = a 處的變位為零。 0 )] , ( [Wn r ra (2. 42) 情況三:
b
a
圖 3. 環狀板內板為固定端,外板為固定端 (i) 內板之邊緣為固定端,則 r = b 處的變位為零。 0 )] , ( [Wn r rb (2. 43) (ii) 內板之邊緣為固定端,則 r= b 處的轉角為零。0 ) , ( b r n r r W (2. 44) (iii )外板之邊緣為固定端,則 r = a 處的變位為零。 0 )] , ( [Wn r ra (2. 45) (iii) 外板之邊緣為固定端,則 r= a 處的轉角為零。 0 ) , ( a r n r r W (2. 46) 藉由各邊界情況之邊界條件,可得: 0 0 0 0 4 3 2 1 44 43 42 41 34 33 32 31 24 23 22 21 14 13 12 11 n n n n A A A A Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe Coe (2. 47) 其中 情況一: ) ( 11 J b Coe n ) ( 12 Y b Coe n ) ( 13 I b Coe n ) ( 14 K b Coe n
) ( ) ( 1 21 J b b n b J Coe n n ) ( ) ( 1 22 Y b b n b Y Coe n n ) ( ) ( 1 23 I b b n b I Coe n n ) ( ) ( 1 24 K b b n b K Coe n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 31 J a a v n n a J v n a a J Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 32 Y a a v n n a Y v n a a Y Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 33 I a a v n n a I v n a a I Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 34 K a a v n n a K v n a a K Coe n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 41 J a a n v n a J n a a J Coe n n n ) ( ) 1 )( 1 ( 3 2 a J a v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 42 Y a a n v n a Y n a a Y Coe n n n (1 3)(1 ) ( ) 2 a Y a v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 43 I a a n v n a I n a a I Coe n n n (1 3)(1 ) ( ) 2 a I a v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 44 K a a n v n a K n a a K Coe n n n ) ( ) 1 )( 1 ( 3 2 a K a v n n n (2. 48) 情況二: ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 11 J b b v n n b J v n b b J Coe n n n
) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 12 Y b b v n n b Y v n b b Y Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 13 I b b v n n b I v n b b I Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 14 K b b v n n b K v n a b K Coe n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 21 J b b n v n b J n b b J Coe n n n (1 3)(1 ) ( ) 2 b J b v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 22 Y b b n v n b Y n b b Y Coe n n n (1 3)(1 ) ( ) 2 b Y b v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 23 I b b n v n b I n b b K I Coe n n n (1 3)(1 ) ( ) 2 b I b v n n n ) ( ] 2 ) 1 ( [ ) ( ) 4 3 ( ) ( 2 1 2 2 2 3 3 24 K b b n v n b K n b b K Coe n n n (1 3)(1 ) ( ) 2 b K b v n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 31 J a a v n n a J v n a a J Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 32 Y a a v n n a Y v n a a Y Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 33 I a a v n n a I v n a a I Coe n n n ) ( ) 1 )( 1 ( ) ( ) 1 2 ( ) ( 1 2 2 2 34 K a a v n n a K v n a a K Coe n n n ) ( 41 J a Coe n ) ( 42 Y a Coe n ) ( a I Coe
) ( 44 K a Coe n (2. 49) 情況三: ) ( 11 J b Coe n ) ( 12 Y b Coe n ) ( 13 I b Coe n ) ( 14 K b Coe n ) ( ) ( 1 21 J b b n b J Coe n n ) ( ) ( 1 22 Y b b n b Y Coe n n ) ( ) ( 1 23 I b b n b I Coe n n ) ( ) ( 1 24 K b b n b K Coe n n ) ( 31 J a Coe n ) ( 32 Y a Coe n ) ( 33 I a Coe n ) ( 34 K a Coe n
) ( ) ( 1 41 J a a n a J Coe n n ) ( ) ( 1 42 Y a a n a Y Coe n n ) ( ) ( 1 43 I a a n a I Coe n n ) ( ) ( 1 44 K a a n a K Coe n n (2. 50) 若為不使得空解(trivial solution),則方矩陣的行列式值必為零,至此行列式 值為零,可得頻率方程式,此為一實數系之超越函數,故利用數值方法(勘根定 理與 secant 方法),以求得頻率參數nm,由矩陣中之任三個方程式都可將A2n, n A3 ,A4n用A1n表示出來。
2.3.3 振態疊加法
既已求得頻率參數nm,且Wn(r,)中A2n,A3n,A4n係數可用A1n表示,則變 位函數可寫成
0 1 ) ( ) , ( ) , , ( n m nm r Y t W t r w (2. 51) 其中,將替代之係數,分別以 B~,C~, D~表之,則 A J r BY r CI r DK r n r Wnm( , ) nm[ n( nm ) ~ n( nm ) ~ n( nm ) ~ n( nm )]cos n0,1,2,... (2. 52) 再代入控制方程式中,得 ) , , ( ) ( ) , ( ) ( ) , ( ) ( ) , ( 0 1 2 2 0 1 0 1 2 2 t r q t Y r W t h t Y r W K t Y r W D n m nm n m nm n m nm
(2. 53)由 Normal Mode Expansion Method 得知,對上式之每一個項乘以Wkl(r,), 並對板面作積分,因振態之振幅廣義座標,亦即正規座標(Normal Coor.)具正交 之特性,也就是說 當ij kl, 2 ( , ) ( , ) 0 0
W r Wkl r r d r d a b ij (2. 54) 故除了k m ; l n 外,餘皆為零,故最後可得 ) ( ) ( ) ( 2 t P t Y M t Y Mnmnm nm nm nm nm (2. 55) 其中, 廣義質量 rdrd r W M a b nm nm
2 0 2 ) , ( (2. 56) 廣義荷重 rdrd t r q r W h P a b nm nm ( , ) ( , , ) 1 2 0
(2. 57) 接著,經由本文所提出之形狀函數,將分佈荷重之情況,假設對每個傅立葉 展開項的荷重強度為沿徑向分段線性(Piecewise Linear),整理可得
a b n nm n nm n nm n nm nm nm A J r BY r CI r DK r rdr M 2 2 [ ( ) ~ ( ) ~ ( ) ~ ( )]2 (2. 58) iwt nm nm P p e P
a b iwt T nm n nm n nm n nm n nm J r BY r CI r DK r h rdr e p A h ( )] ~ ) ( ~ ) ( ~ ) ( [ 2 1 p e rdr r r r r r K D r I C r Y B r J rdr r r r r r K D r I C r Y B r J rdr r r r r r K D r I C r Y B r J rdr r r r r r K D r I C r Y B r J h A iwt r r s s s nm n nm n nm n nm n r r j j j nm n nm n nm n nm n r r j j j nm n nm n nm n nm n r r n nm n nm n nm n nm nm s s j j j j
1 1 1 1 0 1 1 1 1 1 1 0 1 1 )] ( ~ ) ( ~ ) ( ~ ) ( [ ... )] ( ~ ) ( ~ ) ( ~ ) ( [ )] ( ~ ) ( ~ ) ( ~ ) ( [ ... )] ( ~ ) ( ~ ) ( ~ ) ( [ 2 (2. 59) 其中之2 , 係因
02 2 1,2,... n 0 n 2 cos n d (2. 60)2.3.4 外力-變位的關係式
由 2.3.3 節,可得於正規座標之動力反應方程式 ) ( ) ( ) ( 2 t P t Y M t Y Mnmnm nm nm nm nm (2. 61) 解上式微分方程,令 iwt nm t C e Y ( ) 再代回原式,得 ) ( ) ( 2 2 nm nm nm nm M P t Y (2. 62) 上式結果代回變位函數中,可得軸對稱環型板上沿板邊緣所計算的位移函 數。
0 1 2 2 ) ( ) , ( ) , , ( n m nm nm nm nm M P r W t r w
0 1 2 2 ) ( ) , ( n m iwt nm nm nm nm p e M P r W (2. 63)2.4
頻率方程式求根
為了求解彈性板於自由振動下之振態,因而推導出頻率方程式,然而此數學 式為一含 bessel 函數之超越函式,可得無限多組解,是以藉數值方法求之。引用 兩種數值技巧: (1) Bracketing Method (2) Open Method2.4.1 Bracketing Method
本法利用函數於根的兩側,其函數值為異號之特性。因此,需要兩個初始猜 想值(initial gauss)以求根,此二值必須位於真實根之兩側,亦即涵蓋根值之範圍。 故可得以下結論 設一函數 f x ,兩個初始猜想值
x ,l x u 若 f x
l f x
u 0 ,則
x x ,l, u
x 區間內有奇數個根。 u 若 f x
l f x
u 0 ,則
x x ,l, u
x 區間內有偶數個根或無解。 u 以上通則,適用於大部分函數,但當函數為與自變數之軸相切,即重根 (multiple root)或為一不連續,則無法引用上述法則。2.4.2 Open Method
於 Bracketing Method 中,其根為介於兩個初始猜想值之間,而藉不斷引用 其結論,以趨近根值。故可謂其方法具收斂性之優點。而本節之方法,係引用單 一或二個初始猜值,但無須將根值涵蓋於其範圍內。故此法有時會遠離根值,甚 而具發散特性之缺點。但此法具有 Bracketing Method 所不及的優點,也就是當 其收斂時,則收斂速度甚快。Open Method 可概分為三種: (1) Simple One-Point Iteration (2) The Newton-Raphson Method (3) The Secant Method
本文引用第三種,設一函數 f x ,利用
F.D.M 可得一次導數之近似式
i -1 i i i -1 i f x f x f x x x (2. 64)藉代入 The Newton-Raphson Method 之疊代公式中,故可得另一疊代公式
i i+1 i i i i -1 i i i -1 i f x x = x -f x f x x x x f x f x (2. 65) 而上式中須二個猜想值,但無須具 Bracketing Method 之特性。2.4.3 應用求解
如前兩小節所述,分別具有其優缺點。是以本文藉同時引用,以擷取二者之 優點,彌補其缺點。因為頻率方程式為一具有無限多組解之超越函式,故先引用 Bracketing Method,以等間距之值作初始猜值(inital gauss),並利用 Bracketing Method 之通則,藉以判斷於始猜值(inital gauss)間具唯一根值。而於 Bracketing Method 中,為認定是否具唯一根值,故以縮小間距加以檢測。結果,發現頻率 方程式之根值間具近似等差之特性,此一發現更助於求根之過程,可藉此將求根 之過程無因次化(Non-Dimensionize)。接著,將 Bracketing Method 所求得約略根值,分別加減一小於間距之值, 以為 The Secant Method 之二個初始猜值(inital gauss)。藉以求頻率方程式之根 值。
求解過程中,本文利用 Bracketing Method 作為判斷區間內具唯一根值之技 巧。為避免此方法於求根過程缺乏效率,在引用 Open Method 中之 The Secant
Method,由先前之步驟,確定其具收斂性,再利用此法之優點,迅速收斂,求 得頻率方程式之根值。
第三章 實例分析(振態)
3.1 前言
根據前述軸對稱彈性薄板置於彈性基礎上,考慮其於不同邊界條件下之自然 頻率與振態。3.2 ANSYS 介紹
隨著科技軟體的快速發展,發展出許多 CAE 計算軟體,如 ANSYS、ANSYS 的 LS-DYNA 模組、ABAQUS、MARC、ALGOR、 ADINA、ASKA 等商用軟 體。ANSYS 軟體是融合結構、流體、電場、磁場、聲場、分析於一體的大型通 用有限元素分析軟體。由世界上最大的有限元素分析軟體公司之一的美國 ANSYS 開發,它可以與多數 CAD 軟體界面結合,展現數據及數值的共享和交 換,Pro/Engineer, NASTRAN, Alogor, I-DEAS, AutoCAD 等,是現代產品設計中 的高階 CAD 工具之一。它能同時分析 MODEL 受到靜力、動力、流力及熱傳等 多重物理現象影響時之變化,所以多應用在土木、機械、航太、材料、電子、生 物、醫學工程等多種領域。其中的運算原理乃根據有限元素法(Finite element), 因此當模型建立,並給它相關的參數設定,並加以網格化後,再來只需附加模型 的邊界條件,即可直接利用有限元素法來計算。而在 ANSYS 建構 模型的部份, 可以利用三種方式,如,利用 GUI 介面建構模型、以指令方式建構模型、以 CAD 軟體建構模型,再輸入 ANSYS 介面,來探討其動力特性。3.2.1 ANSYS 分析步驟
軟體主要包括三個部分︰前處理,分析計算和後處理。[前處理]提供了一個 強大的實體建模及網格劃分工具,可以很方便地建 構有限元素模型;[分析計算] 包括結構分析(可進行線性分析、非線性分析和高度非線性分析)、流體動力學 分析、電磁場分析、聲場分析、壓電分析以及多物理場的耦合分析,具有靈敏度 分析 及優化分析能力;[後處理]可將計算結果以色彩顯示、梯度顯示、立體切 片顯示、透明及半透明顯示(可看到架構內部)等圖形模式顯示出 來,也可將 計算結果以圖表、曲線形式顯示或輸出。軟體提供了 100 種以上的單元類型, 用來比擬工程中的各種結構和材料。啟動 ANSYS 後,進入軟體畫面以後,程式停留在開始平台。從(主選單)
即可進入各處理模組︰PREP7(前處理模組),SOLUTION(求解模組),POST1
(通用後處理模組),POST26(時間歷程後處理模組)。
3.3 頻率參數
材料性質 環狀板,板內徑 ;板外徑 平板之卜森比(poisson ratio) 平板之彈性模數 平板之密度 平板之厚度 本文就三種情況之環狀板加以推導 我們可以使用一些數學軟體來求解頻率參數值,如 Mathlab、Mathematica 將結果得出,來達到輔助的效果。在本文中 11 12 13 14 1n 21 22 23 24 2n 31 32 33 34 3n 41 42 43 44 4nCoe Coe Coe Coe A 0
Coe Coe Coe Coe A 0
=
Coe Coe Coe Coe A 0
Coe Coe Coe Coe A 0
若為不使得空解(trivial solution),則矩陣的行列式值必為零,置此行列式值為零, 可得頻率方程式,將此頻率方程式套入 Mathematica,解算後即可求得頻率參數 。 ‧ 由頻率方程式知,頻率方程式具有平板內徑 b,平板外徑 a,平板之卜森比 基礎彈性模數 K,四個控制變因。 ‧ 對各種板徑值,其振態 n 間,頻率參數值且隨內外半徑比值越大,差值越小。 ) ( 1 in a 3 . 0 ) ( 1000 psi E ) ( 1 3 in lb ) ( 02 . 0 in h ) ( 3 . 0 in b
‧ 對各種板徑值,其振態 m 間具有近似等差之特性,且隨內外半徑比值越大, 特性更明顯。 ‧ 利用上述特性,可對頻率參數於固定值時做無因次化(non-dimensional)過程, 亦即先求得內外徑比值為 、基礎彈性模數 之頻率參數 值,當真實內外徑比值均放大 y 倍時,僅須將無因次化之頻率參數值縮小 y 倍,當真實基礎彈性模數值均放大 z 倍時,僅須將無因次化之頻率參數值縮 小 z 倍,即為真實頻率參數值。 ‧ 表 1.頻率參數值(情況一) ‧ 表 2.頻率參數值(情況二) ‧ 表 3.頻率參數值(情況三)
3.4 自然頻率
求得頻率參數後,代回 2.21 式 D K D h 2 4 可得基礎上環狀彈性板在不同邊界條件情況下之自然頻率。 頻率參數 邊界條件一 第一模態 第二模態 第三模態 第四模態 n=0 2.55975 6.52796 11.1115 15.6265 n=1 2.58077 6.68065 11.2171 15.7094 頻率參數 邊界條件二 第一模態 第二模態 第三模態 第四模態 n=0 2.15965 6.08623 10.3667 14.7691 n=1 3.57993 6.77031 10.6883 14.9595 頻率參數 邊界條件三 第一模態 第二模態 第三模態 第四模態 n=0 6.73396 11.1965 15.6894 20.1802 n=1 6.82961 11.2863 15.764 20.2432 ) ( 1 3 in lb K ) 1 0 ( x x‧ 表 4. Analytical Solution 之自然頻率(情況一) ‧ 表 5. Analytical Solution 之自然頻率(情況二) ‧ 表 6. Analytical Solution 之自然頻率(情況三) 再比對由 ANSYS 所得出之自然頻率 ‧ 表 7. ANSYS 之自然頻率(情況一) ‧ 表 8. ANSYS 之自然頻率(情況二) 自然頻率 邊界條件一 第一模態 第二模態 第三模態 第四模態 n=0 1.143536 1.717983 3.925607 7.522759 n=1 1.142957 1.764859 3.994468 7.601007 自然頻率 邊界條件二 第一模態 第二模態 第三模態 第四模態 n=0 1.134328 1.593625 3.461602 6.738899 n=1 1.191181 1.793311 3.657269 6.908955 自然頻率 邊界條件三 第一模態 第二模態 第三模態 第四模態 n=0 1.781694 3.980976 7.582089 12.45574 n=1 1.812503 4.040003 7.652779 12.53300 自然頻率 邊界條件一 第一模態 第二模態 第三模態 第四模態 n=0 1.145005 1.724305 3.927228 7.517391 n=1 1.144497 1.770463 3.994675 7.593255 自然頻率 邊界條件二 第一模態 第二模態 第三模態 第四模態 n=0 1.135296 1.596834 3.460781 6.730323 n=1 1.192006 1.799006 3.66066 6.905673
‧ 表 9. ANSYS 之自然頻率(情況三)
3.5 振態
頻率參數再代回 2.34 式 A J r A Y r A I r A K r n r Wn( , ){ 1n n( ) 2n n( ) 3n n( ) 4n n( )}cos 可得基礎上環狀彈性板在不同邊界條件情況下之自由振動各個振態。以下就 三種邊界條件情況與 ANSYS 結果加以比對。角度固定為 0 度且沿徑向在不同模 態(第一、二、三、四模態)、不同 n(n=0、n=1)值。當 n=0 時所表示為沿軸對稱 彈性薄板的角度方向振態呈均值狀態;當 n=1 時所表示為沿軸對稱彈性薄板的角 度方向振態呈 cosine shape 狀態。推導結果以及 ANSYS 之結果,皆有以最大振 態處為比對基準,乘上一形狀因數(shape factor)近似相較。自然頻率 邊界條件三
第一模態 第二模態 第三模態 第四模態
n=0 1.781701 3.974655 7.564533 12.41725
3.5.1 情況一之振態(環狀板內板為固定端,外板為自由端)
圖 4. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 5. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 6. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 7. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 8. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 9. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 10. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 11. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -6 -4 -2 0 2 4 6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS3.5.2 情況二之振態(環狀板內板為自由端,外板為簡支承)
圖 12. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 13. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 14. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 15. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -4 -3 -2 -1 0 1 2 3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 16. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 17. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 18. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 19. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -8 -6 -4 -2 0 2 4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS3.5.3 情況三之振態(環狀板內板為固定端,外板為固定端)
圖 20. n=0 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 21. n=0 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1M
odesh
ape
Position(in)
Analytical solution ANSYS -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 22. n=0 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 23. n=0 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -1.5 -1 -0.5 0 0.5 1 1.5 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 24. n=1 在第一模態下沿徑向 ANSYS 與本文推導結果振態 圖 25. n=1 在第二模態下沿徑向 ANSYS 與本文推導結果振態 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS圖 26. n=1 在第三模態下沿徑向 ANSYS 與本文推導結果振態 圖 27. n=1 在第四模態下沿徑向 ANSYS 與本文推導結果振態 -5 -4 -3 -2 -1 0 1 2 3 4 5 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Modeshap
e
Position(in)
Analytical solution ANSYS -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1Modeshap
e
Position(in)
Analytical solution ANSYS第四章 實例分析(變位)
4.1 前言
根據前述軸對稱彈性薄板置於彈性基礎上承受任意荷重,考慮慣性力之動力 反應模式加以分析其變位。4.2 ANSYS 數值結果與動力反應推導之比較
控制變因 環狀板,板內徑 ;板外徑 平板之卜森比(poisson ratio) 平板之彈性模數 平板之密度 平板之厚度 外力荷重 外力頻率 彈性係數 以下就四種荷重方式,三種邊界條件所加以探討其變位狀況與 ANSYS 結果 相比較。當 n=0 時所表示為沿軸對稱彈性薄板的角度方向皆為均佈荷重;當 n=1 時所表示為沿軸對稱彈性薄板的角度方向為 cosine shape 荷重。此時圖上之 ANSYS 結果是與 n=0 相比對。 ) ( 3 . 0 in b a1 in ( ) 3 . 0 ) ( 1000 psi E ) ( 1 3 in lb ) ( 02 . 0 in h ) ( 1 psi p ) sec ( 5 1; rad ) ( 1 3 in lb K 4.2.1 均佈荷重
當外力荷重沿徑向方向為均佈荷重如圖 28 所示時: 1.邊界條件情況一之變位如圖 29~30 所示,由圖中吾人可知板的變形形狀物 理意義符合邊界條件所給定之,簡化後即與材料力學二維狀態內板邊緣固定外板 邊緣自由相似,內板變位為零逐步至外板變位達最大值。由圖中吾人也可知由 ANSYS 求出之結果,與本文推導之 n=0 接近等值。且當外力頻率 時有此情形,當頻率為 亦可觀察相似之結果。 2.邊界條件情況二之變位如圖 31~32 所示,由圖中吾人可知板的變形形狀物 理意義符合邊界條件所給定之,簡化後即與材料力學二維狀態內板邊緣自由外板 邊緣固定相似,內板變位達最大值逐步至外板變位為零。由圖中吾人也可知由 ANSYS 求出之結果,與本文推導之 n=0 接近等值。且當外力頻率 時有此情形,當頻率為 亦可觀察相似之結果。 3.邊界條件情況三之變位如圖 33~34 所示,由圖中吾人可知板的變形形狀物 理意義符合邊界條件所給定之,簡化後即與材料力學二維狀態內板逼緣固定外板 邊緣固定相似,內板變位為零逐步至板中央處變位達最大值,再逐步至外板處變 位為零。由圖中吾人也可知由 ANSYS 求出之結果,與本文推導之 n=0 接近等值。 且當外力頻率 時有此情形,當頻率為 亦可觀察相 似之結果。 圖 28. 均佈荷重示意圖 p a b ) sec ( 1 rad ) sec ( 5 rad ) sec ( 1 rad ) sec ( 5 rad ) sec ( 1 rad ) sec ( 5 rad 圖 29. 均佈荷重( )下,沿徑向 ANSYS 與本文推導結果變位(情況一) -1.2 -1.1 -1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Disp
lac
em
ent(in)
Position(in)
n = 0 n = 1 ansys ) sec ( 1 rad 圖 30. 均佈荷重( )下,沿徑向 ANSYS 與本文推導結果變位(情況一) -2.5 -2.25 -2 -1.75 -1.5 -1.25 -1 -0.75 -0.5 -0.25 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1