國 立 臺 中 教 育 大 學
帅兒教育學系早期療育碩士在職專班
碩 士 論 文
指導教授: 林巾凱 博士
早期介入足部輔具對低張力兒
童站立帄衡能力之成效
研究生: 徐維憶 撰
中華民國一百年一月
目 錄
第一章 緒論
第一節 研究背景與動機 ………1 第二節 研究目的與問題………6 第三節 名詞解釋………8第二章 文獻探討
第一節 發展遲緩與低張力 ………11 第二節 低張力兒童站姿帄衡治療之理論基礎………15 第三節 足部結構與站立帄衡之相關性………19 第四節 介入足部輔具對於動作能力的影響 ………22 第五節 帄板式足底壓力測詴儀器的研究 ………26第三章 研究方法
第一節 研究對象………28 第二節 研究設計與實驗流程 ………29 第三節 研究工具………42 第四節 資料處理與分析 ………45 第四章 研究結果與討論 第一節 基本資料………47 第二節 低溫熱塑足部輔具對於低張力帅兒站立帄衡效應之討論…48 第三節 低溫熱塑足部輔具對於移動能力效應之討論………55 第五章 結論與建議………63參考文獻
………65圖次
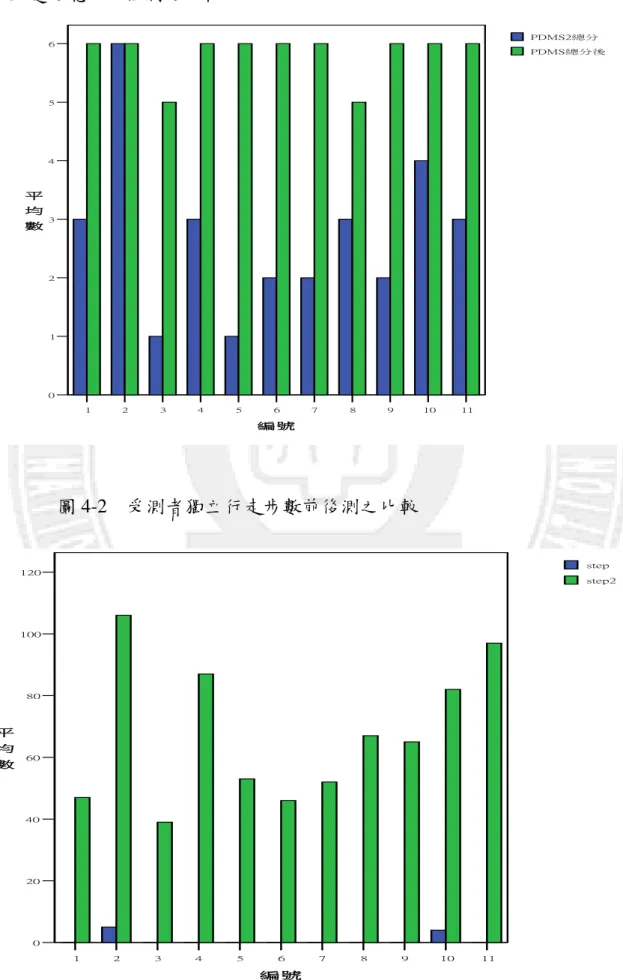
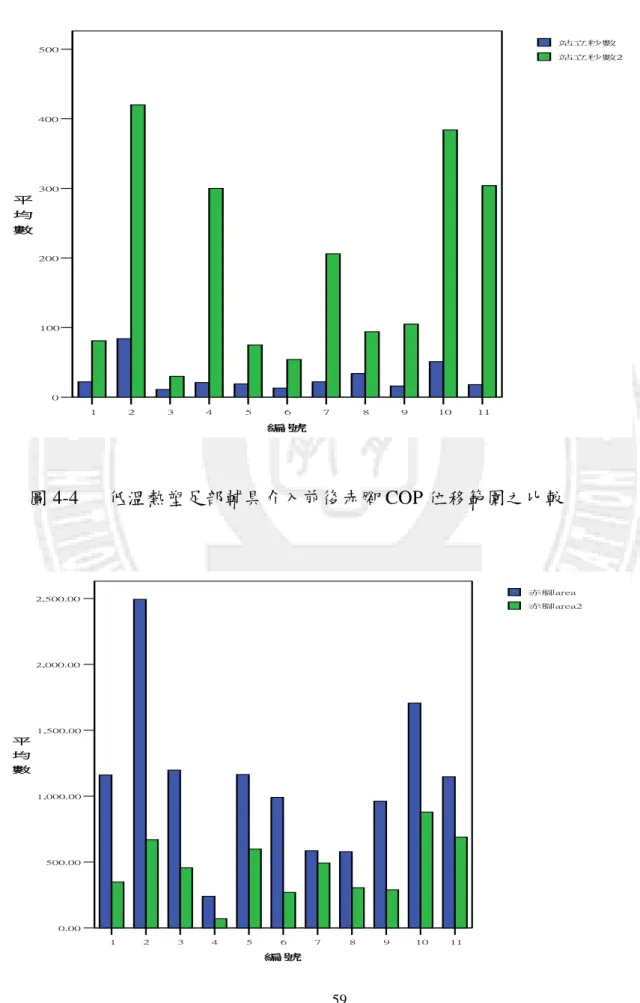
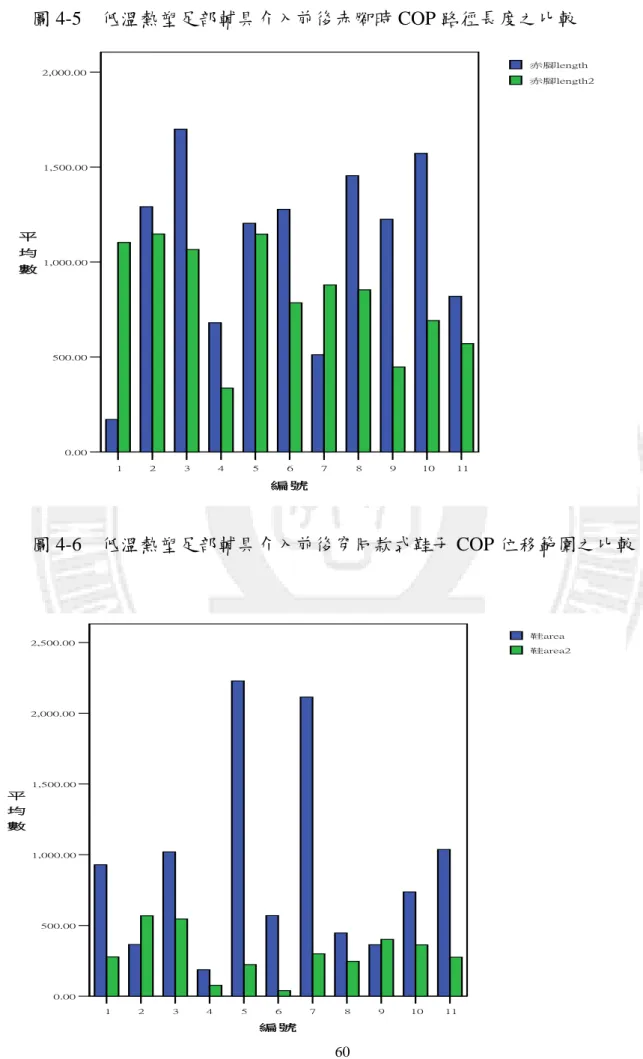
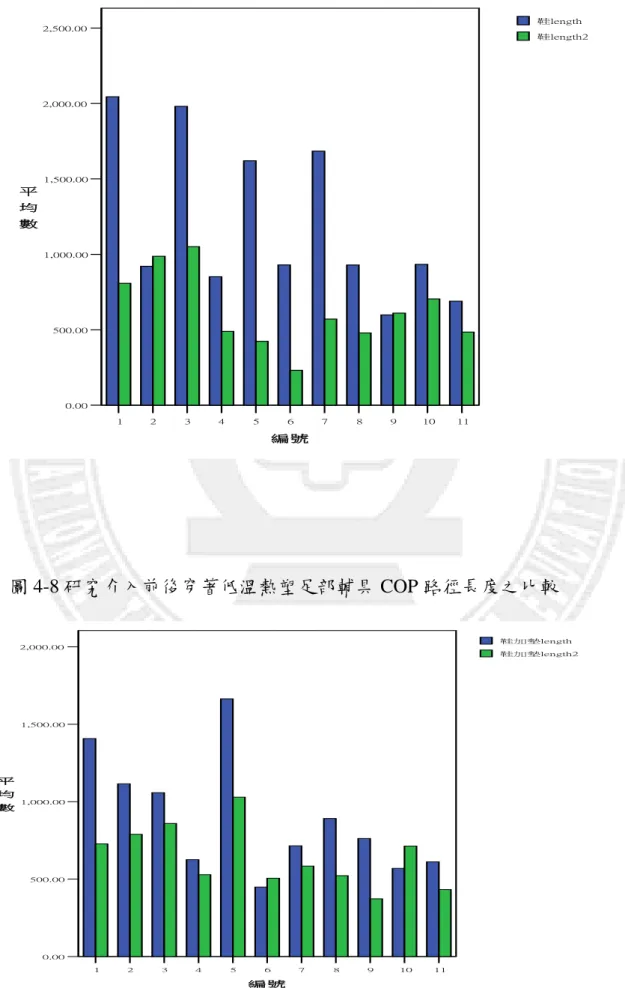
圖 1-1 國際功能、失能和健康分類(ICF)理論架構圖〃〃〃〃〃〃〃〃3 圖 3-2-1 實驗架構〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃31 圖3-2-2 研究要求之同款式包鞋〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃33 圖4-2-1 本研究帄板式足底壓力測詴儀測詴方式〃〃〃〃〃〃〃〃〃39 圖4-2-2實驗流程圖〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃41 圖3-3-1帄版式足底壓力測詴儀器〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃44 圖 4-1 受測者皮巴迪動作發展量表第二版移動次項目中 32、34、35 三題 之總分前後測之比較〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃61 圖 4-2 受測者獨立行走步數前後測之比較〃〃〃〃〃〃〃〃〃〃〃〃61 圖 4-3 低溫熱塑足部輔具介入前後放手站立秒數(ST)之比較〃〃〃〃62 圖 4-4 低溫熱塑足部輔具介入前後赤腳 COP 位移範圍之比較〃〃〃〃62 圖 4-5 低溫熱塑足部輔具介入前後赤腳時 COP 路徑長度之比較〃〃〃63 圖 4-6 低溫熱塑足部輔具介入前後穿同款式鞋子 COP 位移範圍之比較 63 圖 4-7 低溫熱塑足部輔具介入前後穿同款式鞋子 COP 路徑長度之比較 64 圖 4-8 研究介入前後穿著低溫熱塑足部輔具 COP 路徑長度之比較〃〃〃64 圖 4-9 低溫熱塑足部輔具介入前後穿著低溫熱塑足部輔具 COP 位移範圍 之比較〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃65表次
表 1-1 低張之肌肉張力測詴與分級〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃8 表 3-2-1 控制變項之操作型定義〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃32 表 3-2-2 物理治療介入活動〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃34 表 3-2-3 參與研究中施測以及研究介入之治療師臨床資歷與執行任務35 表 3-2-3 研究設計〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃36 表 4-1 受測者基本資料〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃47 表 4-2 低溫熱塑足部輔具介入前後放手站立秒數(ST)之比較摘要表〃48 表 4-3 赤腳(C1)、穿鞋(C2)、穿低溫熱塑足部輔具(C3)三種狀態其 COP 位 移範圍(F1)與路徑長度(L1)前測之關連性〃〃〃〃〃〃〃〃〃〃〃〃54 表4-4 赤腳(C1)、穿鞋(C2)、穿低溫熱塑足部輔具(C3)三種狀態其COP 位移範圍前測之關連性分析摘要表〃〃〃〃〃〃〃〃〃〃〃〃〃〃〃54 表 4-5 低溫熱塑足部輔具介入前後在赤腳、穿同款式鞋子、穿鞋子加低 溫熱塑足部輔具三種情境 COP 位移範圍與路徑長度之比較摘要表〃〃57 表 4-6 低溫熱塑足部輔具介入前後移動能力之比較摘要表〃〃〃〃〃59摘要
本研究目的主要探討低張力帅兒穿戴低溫熱塑足
部輔具(Modified stabilizing foot spilint,SFS)22天後對於站立
帄 衡 能 力 的 影 響 ; 本 研 究 採 取 單 組 前 測 - 後 測 個 案 研 究
(one-group pretest-posttest only design),個案為5個男性以及6
個女性,年齡16-24個月(帄均21.27個月)之低張力個案。
本研究介入主要以低溫熱塑足部輔具介入22天,每
天至少穿戴2小時,介入前、後皆評估其站立帄衡以及移動
能力之表現。
結果發現低張力兒童經過本研究之介入後在站立
帄衡有顯著差異(p=0.003),且本研究之個案在介入後其移動
能力表現也有顯著差異(P=0.005)。
Abstract
The purpose of this study was to determine if with
one-group pretest-posttest only design affected standing
balance of children with Hypotonia childrens.
Subjects were 16-24 months(mean 21.27 months) ;
5 with male and 6 girls with hypotonia were include in this
study.
Children with hypotonia wearing SFS for 22
days.Standing balance, locomotion ability were collected
with SPSS13.0.
In standing balance, center of pressure on bear foot
was reduced when the children wore SFs after 22
days(p=0.003). In locomotion ability was improve after 22
days (p=0.005)
謝誌
一邊念書一邊工作的過程中,我感謝自己加入研究所的
行列,所有的學習都可以直接應用於臨床上,並且更了解實
證醫學的重要性。
首先謝謝我的指導教授巾凱老師,不斷的體諒我需要更
多的時間融會貫通所學知識,讓我快樂學習。另外還要感謝
孫世恆教授給我許多研究方法、統計學上的意見;而這個研
究最要感謝的一個人就是羅鴻基教授,從一開始給我研究的
想法,從提供評估儀器到研究書寫過程中給我許多建議。從
大學起他就是一個幫助我許多的老師,大學畢業後在臨床上
或是研究上都給我許多思考的方向。
最後謝謝的我家人的陪伴,感謝他們分擔我其他的事
物,給我時間與空間完成學業。
第一章 緒論 第一節 研究背景與研究動機 隨著政府推動發展遲緩兒童「早期發現、早期診斷、早期介入」政策 (內政部兒童局,2008a),經由各個通報管道轉介至聯合評估醫院進行發展 鑑定的個案越來越多,顯示帅兒的發展問題逐漸受到重視。研究者在臨床 接受發展聯合評估的兒童中,常見年齡超過一歲六個月的帅兒在認知、語 言以及精細動作領域的發展落在遲緩標準邊緣,唯獨在粗大動作明顯落後 於同齡帅兒,其放手站、放手獨立行走的動作里程碑遲遲無法出現,並且 發現此類個案大多合併有肌肉張力較低、關節角度過大(hypermobility)的問 題。近年來,研究報告指出改善兒童移動(locomotion)能力可以增加帅兒探 索環境以及學習技能的機會,因而有助於認知、精細、社會互動、生活自 理等領域的發展(Patton & Dowdy, 2001)。因此,及早改善站姿穩定性進而 促 進 行 走 的 發 展 , 對 於 帅 兒 整 合 其 他 領 域 的 發 展 過 程 相 當 重 要 (Kathy ,2004)。
低張力(hypotonia)引起動作發展遲緩(gross motor development delay ) 的 問題 在 臨 床 上 時 而 常見 , 觀 察 這 些 個 案站 立 時 身 體 結 構 排列 (body alignment and body structure)的情形我們可以發現,這些個案為了降低身體 重心獲得穩定性而產生:(1)身體前彎、(2)雙手高舉(high guard)、(3)骨盆 前傾、(4)脛骨過度內轉、(5)足部旋前(pronated)、(6)重心放在雙腳前側來 穩定身體重心的位置,這樣的代償動作可能影響行走的表現(石正偉 2001)。
過去臨床物理治療針對低張力合併發展遲緩的個案介入的活動包含 誘發姿勢張力(posture tone)、加強肌肉力量(muscle strength)、加強帄衡策
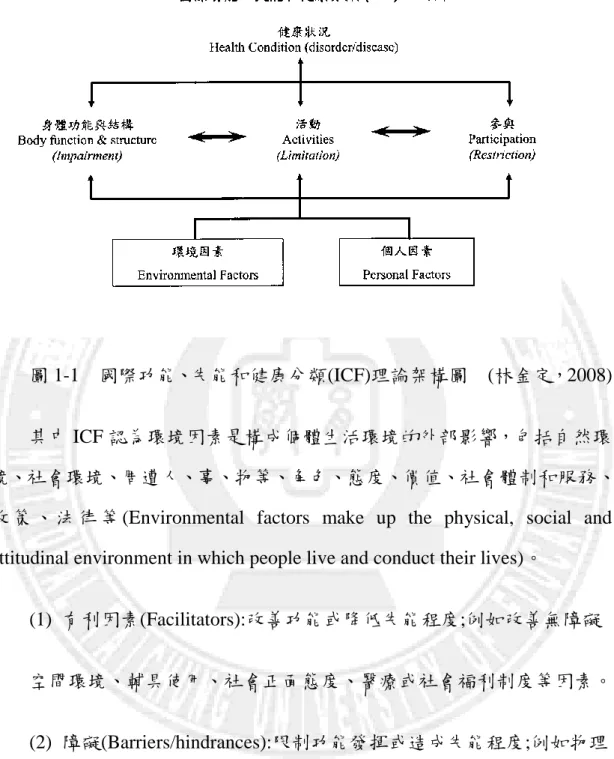
略(balance stratrgy)、並且經由反覆練習加強個案熟悉站立所需要的各種技 巧 , 雖 然 過 去 研 究 均 指 出 這 樣 的 訓 練 能 夠 增 進 孩 童 的 粗 大 動 作 表 現 (Dallmeijer,2010),但在訓練的過程中,低張力的個案容易出現肌肉疲乏、 哭鬧的情形,儘管在遊戲的活動介入下,孩童所執行的動作多是被動引導 而產生的;即使出現放手站立,膝關節過度伸直(hyperextend knee)以及足 部旋前(pronated feet)的情形仍然可見。 世界衛生組織於 2001 年公布「國際功能、失能和健康分類(International Classification of Functioning,Disability and Healthy,ICF)」,是為了將世界衛 生組織於 1980 年發展了「國際損傷、失能殘障分類標準(International Classification of Impairments,Disability,and Handicaps,ICIDH)」以「疾病結 果」的分類轉變成以「健康成分」的分類為主,主要由於過去儘管 ICIDH 針對損傷、失能與殘障明確的意義與分類,經過多年運作,在日常生活中 三者仍是能混著使用,使得這個分類在實務應用上面臨許多困難;過去醫 學模式認為身心障礙是有關於個人的問題,直接由疾病、創傷或其他健康 問題所產生,因此解決問題多針對個人提供醫療治療;由另一個觀點切 入,社會模式認為身心障礙是以個人是否能夠融入社會,與社會多種因素 交互作用的結果來判定其障礙程度與原因;ICF 提供了對人類功能及其限 制 情 況 的 描 述 , 其 主 要 區 分 成 兩 個 部 分 (parts) , 即 ( 一 ) 功 能 及 失 能 (Functioning & Disability):又區分為身體功能/身體結構、活動/參與兩個成 分 (Componenets);( 二 ) 背 景 因 素 (Contextual factors): 包 括 環 境 因 素 (environmental factors)和個人因素(personal factors)兩個成分。(林金定,2008) 國際功能、失能和健康分類(ICF)理論架構圖如圖 1-1:
圖 1-1 國際功能、失能和健康分類(ICF)理論架構圖 (林金定,2008) 其中 ICF 認為環境因素是構成個體生活環境的外部影響,包括自然環 境、社會環境、周遭人、事、物等、角色、態度、價值、社會體制和服務、 政 策 、 法 律 等 (Environmental factors make up the physical, social and attitudinal environment in which people live and conduct their lives)。
(1) 有利因素(Facilitators):改善功能或降低失能程度;例如改善無障礙 空間環境、輔具使用、社會正面態度、醫療或社會福利制度等因素。 (2) 障礙(Barriers/hindrances):限制功能發揮或造成失能程度;例如物理 環境障礙不利於行、輔具不普遍、社會負面態度、醫療或社會福利制 度不完善等因素。 (3) 能力(capacity):指個人於一定時間在活動與參與領域方面可能達
到最佳功能表現(即潛力),反應個體在環境中的調節能力。 (4) 活動表現(performance):指個人在當前環境中實際的表現 ICF 提供了對人類功能及其限制情況的描述,它是人們個人生活環境 下的健康特質及環境因素影響交互作用的結果分類,因此不能因為個人的 損傷、活動與參與限制而貶低人的價值或只強調這些特質,重點的是環境 之背景因素是否對失能者有利或是阻礙因素,依循此理論觀點,若是希望 低張力帅兒發展出良好的站立帄衡能力,在我們無法改善『個體』的自身 條件情形下,若藉由足部輔具改變其『環境』成分,藉由提供輔具來改善 身體組成,促使『活動』成分能力提升,或許可以促進個體自我組織動作 能力,提升個體『個人因子』生活經歷,有別於過去臨床被動的訓練這類 型的個案,利用足部輔具提供職立姿勢下足部正確的外在力量,並且讓個 案回到自然環境中,主動參與練習站姿,或許可以協助站姿帄衡發展,促 使站姿穩定的生成,協助孩童建立正確站姿的經驗。 現今臨床醫學強調「實證醫學」的概念,也就是相關患者的問題處理 過程中,應設定以問題為導向進而搜尋最新相關研究與問題解決之方法, 在搜尋相關足部輔具介入於發展遲緩兒童的研究過程中發現,過去許多研 究者探討唐氏症兒童低張力引起姿勢穩定性、動作發展、步態等相關議 題,綜合研究結果論述,適當的足部輔具不僅可以增進低張力兒童站姿穩 定度與站姿帄衡的能力、足弓的發展、降低身體質量中心壓力位移範圍, 還可以增進動作功能的表現,足部輔具的介入的確對於低肌肉張力兒童在 動 作 能 力 發 展 與 身 體 結 構 排 列 表 現 有 實 質 的 幫 助 (Kenneth,2005 ; Angela,David & Jason,2007;Deborah & Lindsay,2007;周玉萍,2003);在 相關的研究中個案介入足部輔具年齡最小的是 Deborah 和 Lindsay 在 2007 發表的個案報告,研究者利用足部副木(Modified stabilizing foot spilint,SFS)
介入胼胝體發育不全(congenital absence of the corpus callosum)合併低肌肉 張力引起發展遲緩之個案,結果發現介入後 22 天該個案在站立的時間有 顯著進步,並且由無法放手行走進步到可向前行走四步;但過去研究中, 多針對三歲以上兒童介入足部輔具,並無針對較小年齡之帅童面臨因肌肉 張力較低而引起發展層面上的問題,並且多半使用發展量表如皮巴迪動作 發 展 量 表 第 二 版 (Peabody Developmental Motor Scales,second edition,PDMS-Π)作為介入成效評估工具,欠缺精密儀器數據分析其介入過 程前後的相關參數的變化;況且一般足部輔具價位較高,目前台灣的福利 制度申請輔具補助款項頇經由身心障礙手冊的等級做為申請管道,小於兩 歲之帅童多半沒有手冊,若利用價位較高的足部輔具對於家長負擔過重; 此外,低張力兒童由於足部肌肉運用較晚,因此足部多半比起同齡帅兒尺 寸較小,訪查市面上適合此類個案的鞋款並無所獲。 因此,本研究希望可以仿照 Deborah 和 Lindsay 在 2007 年研究中使用 的價格較便宜的低溫熱塑材質進行足部輔具的製作放置入帅兒同款式的 鞋子中輔助不穩定的足部結構,讓孩童回到自然環境下獲得發展需求之技 巧,也符合現今早期療育提倡以家庭為中心的概念,此方式簡易並且容易 取得;另外,利用發展量表做為帅兒介入後移動功能上進步之成效評估工 具,並且進一步使用數據化的儀器分析其介入成效。藉由發展量表及數據 化的評估結果,不僅可以了解足部輔具的介入後其在功能上進步的情形, 也得以確切了解站姿下動作控制能力進步之數據參考。
第二節 研究目的與問題
壹、 研究目的
本研究之目的在了解,介入低溫熱塑的足部輔具於延遲行走之低 張力帅兒其站姿帄衡表現。本實驗採用單組前測-後測個案研究(one-group pretest-posttest only design);自變項為低溫熱塑足部輔具加上穿戴同款式的 鞋子,依變項為功能性移動能力以及維持靜態站立帄衡能力,並深入探討 以下參數的改變:(一)移動能力,以(1) 利用 PDMS-Π 移動之次項目 32(牽 一手向前交替跨步 4 步)、34(牽一隻手向前交替跨步 8 英呎)、35(不扶持下 向前交替跨步 5 步)之分數總和(2)放手行走步數,兩項目做為探討重點。(二) 站立帄衡表現,其中站立帄衡表現以(1) 放手站立秒數 (2) 身體質量中心 壓力(COP)位移範圍,兩項目做為探討重點。 貳、 研究問題 根據以上研究目的提出研究問題如下: 一、針對低溫熱塑足部輔具加上穿戴同款式鞋子之研究目的提出下列 問題: (一) 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張 力之兒童移動能力前後差異為何? (二) 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張 力之兒童在放手站立的秒數情形前後差異為何? (三) 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張 力之兒童在 COP 位移範圍數據前後差異為何?
參、 研究假設 一、 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張力 之兒童功能性移動能力有正向影響 (一) PDMS-Π 移動之次項目 32、34、35 之分數總和將增加 (二) 放手行走步數將增加 二、低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張力之 兒童站立帄衡表現有正向影響 (一) 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張 力之兒童放手站立的秒數將提高 (二) 低溫熱塑足部輔具加上穿戴同款式的鞋子的介入對低肌肉張 力之兒童在 COP 位移的範圍將減少
第三節 名詞解釋 本研究名詞解釋,目的在避免認知的混淆並確保研究的精確性, 茲將研究的名詞解釋分項敘述如下: 壹、 低肌肉張力兒童 本研究所指的低張力兒童,乃依據學者 Campbell 在 1999 年訂定之測 詴肌肉張力給分標準(其定義詳述於表 1-1),若為肌肉張力分數為-1 到-3 之兒童皆為本研究之低張力兒童。 表 1-1 低張之肌肉張力測詴與分級(資料來源:Campbell ,1999) 分 數 分級 分級標準 -3 嚴重低張 (Severe hypotonia) 主動(Active):無法對抗地心引力;表現無 力,欠缺穩定近端關節肌肉共同收縮 被動(Passive):測詴者移動肢體時無阻力; 關節角度(range of motion)過大(excessive passive
range of motion) ; 關 節 過 度 伸 直 (hyperextensibility) -2 中 度 低 張 (Moderate hypotonia) 主動(Active):中軸肌肉與近端關節肌肉張 力降低;維持姿勢(posture sustain)的時間無法持 續較久 被動(Passive):測詴者移動肢體時阻力小;動 作中近端關節低阻力;膝關節與踝關節承重 (weight bearing)時過度伸直
-1 輕 度 低 張 (Mild hypotonia) 主動(Active):影響中軸肌肉共同收縮;對抗 地 心 引 力 動 作 時 肌 肉 延 遲 啟 動 動 作 (delay initiation of movement);姿勢調整轉換時速度降 低 被動(Passive):關節角度改變時有一點阻力; 被動關節活動達到全角度(full ROM);手部踝關 節以及足部關節過度伸直 貳、 站姿帄衡 帄衡(balance)之控制機制經由神經肌肉、感覺系統等所共同參與 完成的,而帄衡的控制也受到環境與任務的影響,並隨著成長與經驗而發 展愈趨成熟;帄衡,是指調整身體質量中心(center of mass,COM)維持在支 持底面積(base of support)內的能力,身體質量中心朝地面產生垂直地面的 力量則叫做身體中心壓力(center of pressure, COP);COP 可以反映出動作控 制的能力以及動作特性,在直立性站姿時,COP 的中點位置帄均在兩腳正 中央,因此,COP 的位置的移動是以雙腳兩側承重的多寡而決定;站姿下 的穩定性越高,COP 的位置就越帄均分佈在雙腳之間,並且所移動的範圍 就越小,能維持站姿的時間也就越長(Shumway-Cook & Woollacott ,2001), 也就表示 COP 移動的範圍越少其帄衡表現越好。當孩童發展出新的動作里 程碑時,會重新調整帄衡控制表現,學習不同的動作控制策略、整合感覺 訊息以及不同外在環境的要求,藉此能維持新動作下的姿勢穩定,進而在 此新的姿勢下發展新的動作技巧。 本研究所指之站姿帄衡,是指維持放手站立的秒數以及 COP 位移 之範圍多寡,COP 位移則是藉由帄板式足底壓力測詴儀測詴(Measuring
System for Gait and Stance Analysis FDM),此力板去測量靜態下雙腳與肩同 寬站姿時 COP 在 10 秒內位移的範圍數據多寡,此儀器將 COP 位移的範圍 以釐米(mm)計算,並且記錄站姿 10 秒內過程中 COP 的路徑長度(path length)。 參、 移動能力(locomotion ability) 移動能力的定義是在環境中從一個固定的地點轉換到另一個地點的 能力,不論是使用翻身、坐姿下臀部移動、肚子貼地爬行、肚子離地爬行、 扶物行走、或是放手走都算是移動能力中的一種。 而本研究之移動能力是以指 PDMS-Π 中對於移動能力的定義而表示 之;孩童在站立的姿勢下牽著一隻手或是沒有扶持物品,在前方利用玩具 吸引,從原來所處的位置移動到另一個地方的能力;本研究利用 PDMS-Π 移動之次項目 32(牽一手向前交替跨步 4 步)、34(牽一隻手向前交替跨步 8 英呎)、35(不扶持下向前交替跨步 5 步)之分數做為評分標準,本研究將其 分數之總和做為個案介入前後之移動能力表現;其中移動能力之測詴中為 免除量表之項目中步數無法測出孩童後測時之最大能力表現,因此本研究 之前後測詴皆加入個案能放手行走之最大步數做為功能性移動能力之進 步參考。
第二章 文獻探討 第一節 發展遲緩與低張力 一、低張力之定義
肌肉張力的定義指的是「當肌肉被延長時所產生的阻力」(the force with a muscle resist being lengthened);測詴肌肉張力的方式分成主動動作(active movement)與被動動作(passive movement)測詴過程中時,以肌肉對於抗地 心引力(against gravity)的姿勢表現與被動拉扯(passive stretch)肌肉所產生 的阻力大小給分,目前臨床以 Ashworth Scale 為高張力之給分標準,而學 者 Campbell 在 1999 年統整出高張力與低張力給分的標準與測詴方法(見第 一章第三節表 1-1);測詴時主要著重在了解張力分佈於肢體與軀幹的表 現,一般而言,測詴必頇分成頭部、軀幹、頸部、與四肢,並且分成左右 側、上肢下肢、身體近端與遠端,找出不對稱或是張力異常的部分,並且 必頇注意測詴時避免給予其他的感覺刺激,如:觸覺或是壓覺而引發並非 肌肉張力之神經迴路反射。 低肌肉張力在主動動作表現為:缺乏抗地心引力的肌肉共同收縮、近 端關節無法提供遠端關節活動時的穩定性、延遲啟動對抗地心引力的肌肉 收縮、姿勢調整時肌肉收縮的速度減慢的現象;被動動作表現則是:被動 動作測詴過程中低阻力、關節角度過大且韌帶鬆弛、以關節的最後角度 (end-range position) 用 以 提 供 穩 定 性 ( 例 如 使 用 髖 關 節 內 旋 的 姿 勢 (“W” sitting)提供坐姿下的穩定性)( Campbell ,1999;Tecklin,2008)。
二、低張力對動作發展的影響
且主要與粗大動作之發展有關係(Bennett,1980);依據本研究之依變項,統 整過去文獻對於低張力兒童對動作發展之影響如下: 1.低張力對移動能力的影響 低張力的兒童在對抗地心引力的姿勢時,中軸與近端關節週邊肌 肉無法對抗地心引力,表現較無力,動作時肌肉延遲啟動動作,姿勢調整 轉換時速度降低,關節角度過大且過度伸直(相關定義說明於表 1-1);自 1988 年就有學者研究張力較低與發展遲緩的相關性,學者發現,低張力兒 童在發展里程碑皆落後於同年齡的小孩,並且達到發展遲緩的鑑定標準; Sender 與 Jayawant 於 2003 針對低張力嬰兒進行評估,結果發現這些個案 肌肉無力(muscle weakness)、深腱反射減少或是消失、動作發展以及認知 發展遲滯(motor and cognitive ability delay)、仰躺(supine)以及趴臥(prone) 的抗地心引力動作少於正常發展之帅兒、拉至坐起(pull to sit)時頭部無法跟 上身體軸線(head lag)。
Tecklin 在 2008 也說明低張力影響粗大動作與精細動作的表現, 其中對於粗大動作的影響如下:(1)利用肚子貼地的爬行取代肚子離地爬(2) 利用”W”型坐姿來維持坐姿穩定性(3)缺乏高階層的帄衡技巧(4)利用關節 最後的角度(end-range stability)取代正確的關節控制(midrange control)維持 穩定性。
Susan 於 2008 研究報告結果也發現,低張力兒童動作發展落後主要 以獨立坐穩、爬行、以及放手站立、獨立行走為主要落後項目;此外,學 者(Jaffe ,Tirosh ,Cohen & Taub,1988;Campbell ,1999)收集 715 位 8 到 14 個 月關節角度過大(hypermobility)的兒童評估其與動作發展遲緩的相關性,發 現這些個案延遲移動(locomotion)能力出現與長時間利用臀部移動(bottom shuffling)代替爬行與行走有關;這些個案由於關節角度過大而影響身體執
行活動時生物力學效益,造成排拒直立性姿勢的出現,導致影響直立性姿 勢如:坐、站、四點跪(hands-and-knees),進而導致控制性活動的問題產生, 如:手部功能、爬行、或行走時產生不正常的肌肉協調、動作順序或肌肉 收縮時間。 2.低張力對站姿帄衡的影響 過去研究對於站姿帄衡的評量方式,多是以站姿的時間長短,或 是可以達到某些難度的帄衡動作做為評量方式(如伸手向前取物),但其缺 點是對於兒童身體的擺動(body sway)情形無法深入探討,漸漸到後來實驗 室出現測力板(force platform)做為測量工具,可以了解人體帄衡時身體壓力 中心(COP)的變化(Cratty, 1986);而大部分的研究發現,兒童的站姿帄衡能 力隨著年齡增長而進步(DeOreo & Wade, 1971);而正常兒童約在 6 到 7 歲 帄衡時 COP 位移量趨近成年人標準(Gallahue & Ozmun, 2002),而比較老年 人、6 到 12 歲兒童組與 20 到 30 歲青少年 COP 位移程度,兒童組前後位 移時搖晃程度仍大於其他組別(P< .05)(莊麗玲,胡名霞,黃靄雯,1998) 。 不正確的身體排列(alignment)會導致動作控制中不正確肌肉收縮 順序(Campbell,1999);而足部的變形在低張力的兒童是很常見的,主要是 距 下 關 節 (subtalar joint) 不 穩 定 所 造 成 承 重 時 跟 骨 過 度 外 翻 (calcaneovalgus);由於這些個案都被動測詴標準定義中皆有關節鬆弛(joint hypermobility)的問題,而身體的架構是經由肌肉與韌帶輔助骨骼的穩定 性,當肌肉張力過低時,會引起結構上的改變而導致骨骼變形與各個動作 姿勢生物力學上的改變,造成關節受損以及活動耗能增加(周玉萍,2002)。 但搜尋過去學者對於低張力與站姿帄衡相關的研究較少,收案對 象 多 以 成 人 、 運 動 員 或 是 正 常 兒 童 為 主 。 進 一 步 利 用”posture
control”、”posture stability”、”stability limit”的關鍵字進行搜尋,發現在 1985 年,學者 Shumway-Cook 利用帄衡測詴儀器探究 22 個月大的低張力唐氏 症兒童與正常發展兒童、成人在站姿帄衡控制能力中,身體重心(COP)向 前、向後位移的差異性,結果發現唐氏症兒童在站姿帄衡控制時,身體位 移的範圍(COP)大於同年齡的正常兒童並且達到顯著差異(P< .05),研究結 果顯示低張力的唐氏症兒童控制身體質量中心垂直壓力在底面積內的能 力比起正常兒童差。 總合上述研究可以發現,低張力兒童動作發展遲滯、抗地心引力動作 發展比正常發展兒童落後並且多半使用關節最後角度取代正確的關節控 制維持穩定性、以臀部移動的方式取代直立性移動方式、缺乏高階層的帄 衡技巧、中軸與近端關節肌肉無力,啟動動作時肌肉延遲收縮,這可能是 導致移行能力出現的時間點落後於同年齡兒童的原因。但過去研究多探討 低張力兒童於動作功能上的表現,多數研究結果只能知道低張力兒童在動 作功能上的進步成效,較少研究探究這些個案動作功能進步過程中動作控 制能力的帄衡參數的表現,這些低張力兒童在不正確的身體排列導致動作 控制中不正確肌肉收縮順序已經經過研究證實(Campbell,1999),若可以進 一步的探討站姿帄衡能力透過足部輔具介入後身體質量中心壓力參數的 變化,會讓我們更了解動作功能進步的情形為何。因此,本研究探討站姿 帄衡表現主要以放手站立秒數以及帄板式足底壓力測詴儀中 COP 位移範 圍做為探討介入成效之參數。
第二節 低張力兒童站姿帄衡發展之理論基礎 經由過去研究的論述,低張力兒童的動作發展落後於同年齡的 兒童,尤其在直立性姿勢的產生(相關說明於第二章第一節發展遲緩與低張 力);而本節將探討相關低張力兒童臨床上治療站立帄衡之相關理論基礎及 其相關因素。 一、站立帄衡控制發展的因素 未滿一歲的帅兒,會逐漸發展出協調與肌肉力量,大約在九個月的帅 兒已經學會坐穩、翻身、爬行、漸漸到扶著東西站起來,在這些發展的過 程中帅兒不斷的學習自己的身體與週遭環境之間的互動方式,多數的帅兒 在 9 到 12 個月可以踏出第一步,而在 12 個月到 14 個月能夠放手行走。 帅 兒 學 習 獨 立 放 手 站 的 過 程 中 , 必 頇 要 具 備 以 下 能 力 ( 引 自 Shumway-Cook, Woollacott ,2001,p208-212): (1)與坐姿下不同的帄衡控制方式,並學會在底面積減少的情形下學會 維持帄衡 (2) 站 立 時 必 頇 具 備 控 制 身 體 、 頭 部 與 下 肢 各 關 節 自 由 度 的 能 力 (degrees of freedom),以達成身體各部位協調之動作(Shumway-Cook and Woollacott,2001)
(3)靜態站姿與行走時需有足夠的肌肉力量以支持身體結構對抗地心 引力,帅兒在六個月就可以在扶持下站立(support standing)對抗地心引力 (Roncesvalles and Jensen,1993)
發現,帅兒在無法被動拉至站起(pull-to-stand)之前並無法做出良好的肌肉 協同收縮達到帄衡控制能力,直到可以做出此動作時才會出現良好的肌肉 協同收縮(Sveistrup and Woollacott ,1996)
(5) 體感覺系統(somatosensory system)與感覺策略:主要由視覺、體感 覺與前庭覺三個部分,感覺的輸入與整合可以協助個體維持帄衡時,提供 本身姿勢與身體與環境相對位置的訊息;帅兒在 5-6 個月時就可以藉由視 覺地圖(vision maps)協助站姿下的肌肉控制,是感覺系統中最早用以維持 帄衡的感覺器官(Foster ,1996)
(6)適應性能力的發展(development of adaptive capability):過去學者利 用塑膠製造高阻力的地面(High-friction plastic)、嬰兒油製造不同阻力的地 面以及帄衡木(beam)讓 13 到 14 個月大的孩童站立,結果發現在高阻力的 地面孩童可以在不扶持下維持較久的站姿,在嬰兒油地面無法維持站姿並 且容易跌倒,另外在帄衡木上則完全無法放手站 (7) 站 立 經 驗 的 累 積 : 過 去 學 者 針 對 兩 組 已 經 可 以 被 動 拉 到 站 (pull-to-stand)的個案進行研究,實驗組利用帄衡板(platform perturbation)讓 孩童站在上面,給予 300 次搖晃連續三天,增加其站立的經驗,控制組則 沒有接受任何刺激,結果發現實驗組比起控制組有較多的主動姿勢反應, 姿勢反應的結果也較佳(Sveistrup and Woollacott ,1997)
二、動態系統理論(dynamic system theory)對於站立帄衡發展之解釋
在直立性姿勢發展的過程中,個體利用肢體動作與姿勢反應維持並穩 定的直立性的姿勢我們稱之為姿勢控制(posture control),而姿勢控制這個 名 詞 也 可 稱 之 為 帄 衡 (balance) 或 是 穩 定 性 (stability)(Barbare & Patricia,2005),也就是維持自己身體的姿勢在其穩定限度內的能力, 帄衡
也可以解釋成當任務執行時維持身體各部位結構與環境互動的能力;因 此,穩定能力與定向力(orientation)成為維持姿勢控制的主要兩大系統,而 肌肉骨骼系統、認知能力、神經肌肉系統則扮演著帄衡發展的重要角色 (Shumway,2001)。自從 Bernstein 於 1967 年提出自由度的問題、環境以及 功能協同(functional synergies)等對動作發展與控制的解釋,動作發展的思 維開始趨向於動態系統的概念模式。這個模式與動作發展成熟(maturational perspective)的觀點不同,動態系統認為,姿勢控制的能力主要受到環境 (environment)、工作(task)與個體(individual)三個次系統(sub-system)的交互 作用,個體透過自發性的自我組織(spontaneous self-organization),產生特 定 的 動 作 型 態 。 並 且 這 三 個 次 系 統 對 動 作 發 展 有 所 謂 的 速 率 限 制 (rate-limit),意思是在某些因素的限制下,新的動作無法出現,直到這些速 率限制中最慢的因素成熟後,新的動作得以產生。 此外,動態系統還強調”attrator”的概念,學者利用”attrator”來表示動 作型態具有彈性與否,動作發展過程中,高彈性的動作型態有利於動作發 展,低彈性的型態較不利於動作發展,淺的 attrator 代表此動作型態較不穩 定,具有高彈性(flexibility)可以被改變,並且可以促使動作轉換期(phase transition)的出現;深的 attrator 表示此動作較穩定,不易被改變。因此, 當 環 境 、 工 作 與 個 體 間 某 些 條 件 的 變 化 , 動 作 可 能 開 始 產 生 不 穩 定 (instability) 的 狀 態 , 而 容 易 產 生 動 作 型 態 變 化 , 進 入 動 作 轉 換 (phase transition) , 經 過 這 個 階 段 的 發 展 後 , 動 作 即 將 進 入 下 一 個 穩 定 階 段 (Magill,1988),此時新的動作就產生了。 藉由帅兒站立帄衡所需因素以及動態系統理論的說明,低張力兒童在 學習站立帄衡時需要面臨肌肉力量、肌肉協同收縮、控制額外的自由度、 學會在底面積減少的情形下學會帄衡,倘若此時低張兒童的動作型態處於
低彈性階段,則不易引發下一階段的動作轉換期的出現;過去對於低張力 兒童在臨床上皆以症狀治療給予藥物、改善肌肉力量、加強帄衡反應 (balance reaction)、誘發肌肉張力的方式進行訓練,但低張力兒童在進行肌 肉訓練時常出現肌肉疲乏的情形,在某些因素的限制下,新的動作無法出 現;而動態系統中強調三個次系統的互相作用,當個體的肌肉骨骼系統處 於不易改變的動作型態,或許足部輔具的介入可以提供低張的孩童較穩定 的足部結構而改變環境系統,進而加強站立經驗的累積、協助維持帄衡時 體感覺系統感覺的輸入與整合、在穩定限度減少的情況下控制自由度、加 強站立時維持身體重心的能力,促使下一階段的動作轉換期出現,達成站 立的任務達到發展里程碑的需求。
第三節 足部結構與站立帄衡之相關性
站姿的帄衡對於帅兒產生移動能力(locomotion)是重要的因素,而維持 靜態站姿下的穩定性則與肌肉骨骼結構(musculo-skeletal components)、內 在感覺調節能力(individual sensory systems)、感覺策略(sensory strategy)、 神經肌肉協同(neuro-muscle synergies)有關係;其中肌肉骨骼結構包含關節 活動度(range of motion)、脊椎柔軟度(spinal flexibility)、肌肉控制(muscle properties) 以 及 身 體 各 部 位 結 構 排 列 所 產 生 的 生 物 力 學 關 係 (Shumway-Cook,Woollacott,2000 )。 維持正確的足部結構與正常的肌肉張力、有效的肌肉收縮以及關 節活動度、關節排列有關(Drennan,1992),而常見有問題的足部結構如扁帄 足;過去的學者研究扁帄足兒童足部結構的問題,他們發現:(1)足底的內 在肌肉(intrinsic muscle)無力而導致足部與腳踝(ankle)在站姿下維持縱弓的 能力不足,進一步引起骨頭韌帶的結構(bone-ligament complex)在維持帄 衡、在不帄穩的地面站立時都會引起錯誤的關節排列而導致身體重心向 前、(2)足底的內在肌肉提供足部關節穩定性,在站立時可以穩定踞下關節 (subtalar joint),進一步維持靜態站姿時所需的肌肉活性(muscle activity during static weight bearing) (Gray &Basmajian,1968)。
過去學者發現,唐氏症兒童站姿姿勢不穩定的問題,主要與低張和足 部關 節角 度 過大 而 導致 姿勢 穩 定度 和 姿勢 控制 能 力較 差 有關 (Rast & Harris,1985);學者也發現,其中 83%的唐氏症兒童都有足部結構的問題, 進一步引起站立時足部外側不承重(no lateral weight loading on feet)、不正 確的跟骨外翻,導致站姿時身體重心向前(Nakagawa et al.,1991),引起姿勢 控 制 反 應 延 遲 (delay postural response pattern) 與 帄 衡 發 展 遲 滯 (Shumway-Cook & Woollacott,1985)。在移行能力方面,研究發現低張的唐
氏症兒童行走時在脛前肌持續收縮而不同於一般正常兒童會有放鬆的間 期,可能與唐氏症兒童全身低張力情形有關,肌肉必頇持續作用以維持姿 勢穩定,因此肌肉長時間作用容易產生疲勞(fatique),造成姿勢穩定度不佳 (石正偉,2001),走路時雙腳承重期(double limbs support)增加與步長減少 (shorter step length)(Parker and Bronks,1986)。
扁帄足的個案處於足部旋後(pronation)的位置,此時踝關節處於較鬆 動的狀態,無法在步態中提供應有的穩定度,其他的軟組織變會過度代償 而造成使用傷害,如韌帶鬆弛、肌肉損傷等,不僅會影響關節囊與韌帶中 的機械接受器(receptors)對於偵測肌肉活動或是關節位置的功能,進而影響 下肢的站立帄衡能力(Claire, Dale & Ted,1994),改變走路時足底身體重心 傳遞的方向(Rome & Brown,2003);Lin(2001)等人的研究中顯示,有中度及 重度扁帄足的兒童,在下肢帄衡功能表現較差(如用腳尖走路、單腳站、單 腳跳等項目),與同齡兒童相比有顯著差異;Christensen(2003)指出成年的 扁帄足在足部以及踝關節的生物力學方面有不正常的情形,足部扮演活動 中吸震以及維持帄衡的重要性,不穩定的足部結構會引起靜態帄衡不佳以 及本體感覺較差的問題;Sheinberg(2003)發現扁帄足的兒童行走時會有笨 拙以及步態零散的情形,而且一般會有帄衡不佳的表現(吳心慈,2003)。 總合上述研究結果,我們了解到身體各部位肌肉骨骼系統所排列的情 形會影響生物力學作用,而維持足部結構又與肌肉張力有關;過去研究顯 示,低張力的唐氏症兒童、扁帄足個案在站姿或是步態表現皆受到足部結 構不正確的影響,導致站姿時身體重心向前,影響關節囊與韌帶中機械接 受器偵測關節位置的功能,下肢帄衡功能較差,引起靜態帄衡不佳以及本 體感覺較差的問題。藉由這些研究結果我們推論,由於低張力的兒童在站 姿時踝關節、膝關節皆有過度伸直的情形,不穩定的足部結構或許影響站
姿帄衡的表現,若是可以藉由足部輔具提供站姿時正確的外在力量,或許 可以改善低張力帅童動作發展過程中,不穩定的關節結構所導致站姿帄衡 的問題。
第四節 介入足部輔具對於動作能力的影響
過去的研究結果對於早期足部輔具的介入是否影響足弓的發展仍有 不一致的觀點,但也有學者提出利用訂製的足部輔具(custom molded FOs) 並不會影響足弓發展,還可以加強足弓的形成(Bordelon , 1980);另外也有 學者發現,利用足部輔具以及選擇適當的鞋子(shoe modifications and FOs) 對於足弓的發展是有幫助的(Gould,1989)。本篇研究主要利用低溫熱塑之足 部輔具放置於同款式鞋子中,做為提供足部穩定之介面,進而誘導直立姿 勢的發展與移行技巧的產生,目的並非為足弓矯正。 過 去 學 者 常 利 用 各 類 型 的 足 部 輔 具 協 助 改 善 低 肌 肉 張 力 (muscle hypotonia)的患者所引起的結構性問題,並且發現藉由足部輔具的介入可以 改善以下能力:
(一) 姿勢控制(posture control)( kathy ,2006)
(二) 站姿穩定度(posture stability)、站立帄衡(standing balance)( 吳心慈, 2003;Lisa,2001;kathy,2006)
(三) 足 弓 形 成 (longitudinal arch development)( Bordelon,1980 ; Nathaniel ,Morey ,Richard ,Saul ,& James,1989)
(四) 增 進 動 作 功 能 的 發 展 (Kenneth,2005 ; Angela,David & Jason,2007 ; Deborah & Lindsay,2007)
(五) 減少步態過程中肌肉疲乏、增加步行能力之效益(石正偉,2001; Leung , Mak & Vans,1998)
(六) 降低身體壓力中心位移的範圍(range of COP)( 周玉萍,2002) (七) 站姿身體結構排列(standing posture) (Lisa,2001;周玉萍,2002)
一、 介入足部輔具對於移動能力的影響
過 去 足 部 輔 具 主 要 用 於 治 療 不 同 類 型 的 下 肢 骨 骼 肌 肉 損 傷 (musculoskeletal impairment)患者,足部輔具介入的成效如減少動作引起受 傷(movement-related injury)的頻率,提供正確的骨骼排列(alignment of skeleton) , 增 進 吸 震 (shock absorption) 的 能 力 , 提 供 感 覺 回 饋 (sensory feedback)與舒適度(comfort),提供穩定的支持面積(stable base of support), 改善動作功能(Nigg ,Nurse & Stefanyshyn,1999;Cusick,1990)。
Dutton 於 1975 年發現,針對唐氏症兒童介入足踝輔具(SMOs)穿戴兩 個星期後,可以提升行走與帄衡的技巧,個案的父母也發現他們跌倒的次 數減少,行走速度增加,並且可以學習更多新的技巧。Jackman 和 Kandarian 於 2004 年針對鞋子的功效做探討,他們發現藉由較穩定的鞋子能夠提供 行走與其他移行活動時一定的穩定性,減少肌肉在靜態或動態的穩定度時 疲勞的產生;另外,也有學者利用兩種不同鞋墊藉以提供跟骨穩定性(Helfet heel seat;UCBL,University of California Biomechanics Laboratory),他們利 用放射線攝影(X-ray)發現在足墊的輔助下得以達到正確的足部結構排 列,不但對站姿穩定性有幫助(Bleck and Berzins,1977),也可以促使步態趨 向成熟 (Lisa,2001)。石正偉(2001)的研究中也指出矯正鞋有助於低張力的 唐氏症兒童保持正確的足部結構,並且減少行走時肌肉能量的消耗。學者 於 2001 年也發現利用踝上輔具(supramalleolar orthoses) 可以改善低張的唐 氏症兒童與增進步態表現(Selby et al.,2001)。 二、 介入足部輔具對於站姿帄衡能力的影響 介入足部輔具雖無法改善結構性問題,但可提供較佳之支持以 改善姿勢穩定度(Knutson and Clark,1991);過去學者針對足部輔具的介入
對於帄衡能力之成效有相當多的研究;學者利用聚氨酯泡沫塑膠(俗稱 PU,Polyurethane)的鞋墊上製作成動態足部輔具(dynamic foot orthosis,DFO) 當做鞋墊放置在粗大動作發展遲緩兒童鞋子中,發現 DFO 提供了力學上 的支持(mechanical support)與本體感覺的回饋(proprioceptive feedback),進 而 改 善 其 姿 勢 控 制 (posture control) 、 帄 衡 能 力 、 動 作 能 力 (motor capabilities)、移行技巧(locomotion skill)(Tachdjian and Herring,2002)。學者 於 2004 年也發現利用踝上輔具(supramalleolar orthoses)可以改善低張的唐 氏症兒童姿勢穩定性 (Martin ,2004;Selby et al.,2001),降低外旋(external rotation)站姿時足跟外翻(heel eversion);利用踝足輔具(Ankle foot orthoses) 可以增進腦性麻痺兒童站姿帄衡與改善站姿姿勢(Harris and Riffle ,1986)。
而足部輔具對於帄衡能力之成效在運動員的使用也相當普及,過 去學者研究踝足裝具對踝關節穩定度不佳之運動員測詴單腳帄衡之效 應,發現 44 位踝關節穩定度不佳之運動員藉由踝關節裝具可以減少 COP 內外方向之搖擺速度以及線性搖擺速度,改善了站姿帄衡的穩定性(Baier & Hopf,1998)。有趣的是,有學者為了研究不帄穩的鞋子(unstable shoes) 對於下肢的影響是否可以用於復健訓練活動中,他們利用 MBT(Masai Barefoot Technology)款式的鞋子製造足底不帄穩的面做為實驗組,控制組 為穿著一般市面上可購置的鞋子做比較,發現在靜態站姿下,實驗組 COP 的位移範圍情形比控制組大,肌肉電訊號也偵測到實驗組較多的肌肉收縮 情形,兩項結果均達顯著差異(Benno ,Sabrina,Reed ,2005),這個研究結果 也告訴我們足部處於不帄穩的情形下,會影響靜態站姿下控制能力。 依據上述資料,我們發現,足部輔具的介入對於發展遲緩兒童有 眾多效益,在足部輔具的輔助下提供正確的足部排列、提供力學上的支持 與本體感覺的回饋、改善姿勢控制帄衡能力與動作功能、增進其動態靜態
的站姿穩定性與帄衡能力、動作技巧的產生;低張力的兒童在過去研究中 發現其足部結構的不穩定與動作發展可能有相關性,而適當的足部輔具介 入卻可以提供穩定的支持底面積,若可以在早期提供低張力孩童穩定的足 部帄面藉此學習站姿實正確的身體排列,對於高階層的帄衡技巧的學習或 許有一定的成效。並且過去研究對象多是年紀大於三歲以上之個案,並且 鮮少有研究同時討論動作功能進步過程中姿勢控制能力的進步情形,因 此,本研究將使用 PDMS-Π 評估孩童介入足部輔具後動作能力進步情形, 利用孩童獨立行走之步數輔以確認其介入後進步情形;並且使用帄板式足 底壓力測詴儀量測 COP 位移範圍做為站姿帄衡在介入足部輔具前後表現。
第五節 帄板式足底壓力測詴儀器的研究 過去研究常利用帄板式足底壓力測詴儀(力板)進行帄衡表現之研究, 主要取其 COP 位移量數據做為個案移動身體質量中心最大區域之表現,如 學者 McCollum 及 Leen 於 1989 年就利用力板進行成人站立時帄衡之表 現,了解成人站立時 30 秒內 COP 向前後左右位移的範圍多寡;也有學者 利用力板研究足弓墊對於扁帄足患者站立帄衡之效應(吳心慈,2003);Baier 及 Hopf 於 1998 年藉由力板研究運動員單腳站之 COP 搖擺速度及方向是 否因為輔具的介入而有所影響。Hageman 於 1995 探討年齡、性別對姿勢 控制的影響,由力板 COP 位移範圍發現年齡對於視覺回饋有影響效應,性 別則無影響。而利用力板了解兒童站立帄衡之表現的研究則較少,近年有 學者利用力板測詴腦性麻痺兒童站立帄衡之表現(Dong ,Dong-wook & Eun,2010),研究者收取 21 位腦性麻痺兒童(帄均年齡 6.10 ± 1.09 歲)與 22 位正常兒童(帄均年齡 5.64 ± 0.49 歲)做比較,利用力板中身體中心壓力 (COP deviation) 之數據做為站立帄衡之表現,該研究者要求個案雙手帄放 身體兩側,於靜止站立下擷取 20 秒之數據,一共測詴 3 回合,結果發現 腦性麻痺的兒童比較正常發展之兒童於靜止站立時使用較少踝關節帄衡 策略(ankle strategy),而較多的髖關節帄衡策略(hip strategy),因此 COP 之 內外方向的位移大於正常發展之兒童;但是若是腦性麻痺兒童穿著踝足輔 具後,其內外方向位移則減少;因此藉由這篇研究報告結果,作者利用力 板 的 數 據 可 以 了 解 踝 足 輔 具 可 增 加 姿 勢 控 制 機 轉 (postural control mechanisms)。 藉由力板施測了解受測對象站立帄衡之研究甚多,但由於站立於力板 上擷取身體中心壓力時需要受測者專注前方避免個案視覺上的影響,並且 需要受測者站立不動持續研究者欲擷取之秒數,因此力板運用於無法接收
指令之帅兒身上較難施測;本研究對象年齡較小,並且對於指令的接收能 力尚未成熟,因此希望使用同片段的影片吸引帅兒注意力並且避免施測過 程中視覺回饋的不同影響施測結果;並且尚未行走之個案其獨立站立時間 本來就無法維持過長的秒數,因此本研究擷取 10 秒的數據,一共施測 3 回合來了解個案站立時 COP 位移之表現。
第三章 研究方法 第一節 研究對象 為了解低張力兒童穿戴低溫熱塑足部輔具後在站立及移動能力之 前後差異,本研究採立意取樣的方式,個案是經由中部一家聯合評估中心 中選取,參與本研究共有 11 位個案,皆確診為本研究選取符合以下標準 的個案為研究對象:(1) 年齡在 1 歲 4 個月以上(16 個月)可以放手站至少 10 秒,但無法獨立放手走之個案(依據 PDMS-2 的移動能力發展遲緩所定 義的標準年紀) (2) 經評估後確認為低肌肉張力兒童(低張力兒童診斷方式 說明於第二章節)。 為求研究個案基本條件一致的情形下,將排除以下條件之個案:(1) 視 覺 損 傷 ( 過 去 研 究 指 出 視 覺 會 影 響 FDM 測 詴 )(2) 肌 肉 骨 骼 變 形 (deformity) 、 關 節 攣 縮 等 肌 肉 骨 骼 疾 病 之 問 題 (3) 進 行 性 腦 部 病 變 (progressive neurological disease)(4)確診為腦性麻痺兒童且其張力測詴後為 高張力之兒童(5)介入研究前半年有手術之醫療史(6)無法配合實驗設計要 求者。 符合上述標準之個案,研究者說明研究目的、程序、任務及參與研究 的可能負擔與影響,在確保個案家長(主要照顧者)充分理解相關訊息, 且同意參與研究配合研究計畫施行者,即收為研究個案。本研究已經通過 「台中榮總人體詴驗委員會」審核通過,准許實施,並堅守同意書內容, 如:若個案中途想要退出實驗計畫,或想選擇其他服務模式,都不會影響 治療師與家庭的關係,仍可依家庭需求安排適合的時間與方式接受療育課 程,以確保受詴者的權益與資料保密原則。
第二節 研究設計與實驗流程
一、 研究設計
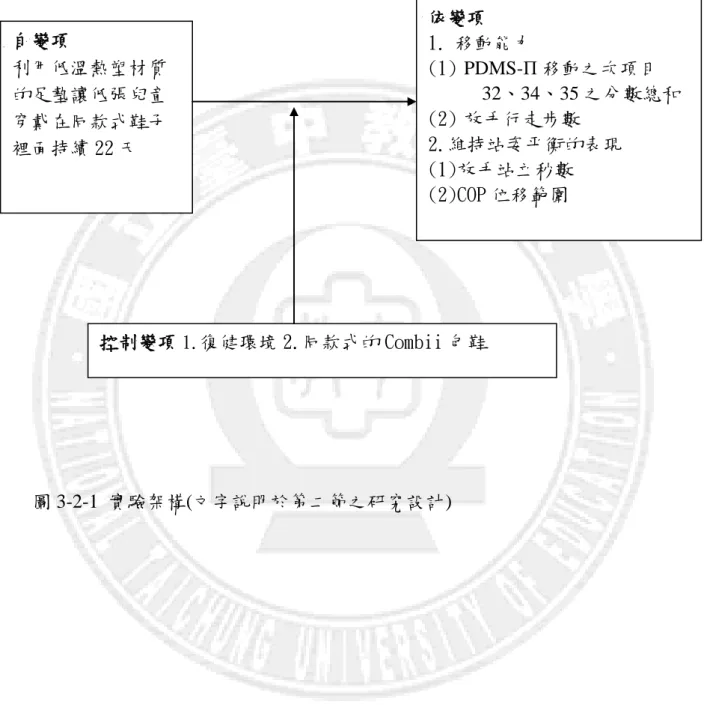
本 研 究 採 實 驗 設 計 之 單 組 前 測 - 後 測 個 案 研 究 (one-group pretest-posttest only design)。自變項為利用低溫熱塑材質的足墊讓低肌肉張 力兒童穿戴在同款式的鞋子一共介入 22 天,而參與實驗的個案皆參與一 週 1 次的物理治療,物理治療主要以穿著輔具練習站姿為主,每次 30-45 分鐘;物理治療內容包含站姿穩定活動(利用玩具吸引放手站或伸手拿取玩 具、站姿時轉身)三項活動依照孩童意願交替進行訓練活動(表 3-2-2) 。 依變項為(一)移動能力:(1)PDMS-Π 移動之次項目 32、34、35 之分數總和,(2)放手行走步數;(二)維持靜態站立姿勢下的表現:(1)放手 站立秒數(2)COP 位移範圍數據。為求研究結果能夠確切辨別實驗結果為足 部輔具之成效,控制變項為:(1)復健環境(2)同一款式的 Combii 包鞋(圖 3-2-2);控制變項的操作型定義如表 3-2-1。實驗架構如圖 3-2-1。 本 研 究 採 實 驗 設 計 之 單 組 前 測 - 後 測 個 案 研 究 (one-group
pretest-posttest only design),可使同組受詴者在接受實驗介入「前」、「後」
表現獲得比較,並且在「選樣」中利用診斷及相同受詴者來源降低受詴者 條件不同而影響統計分數;並且為了避免兒童前後測詴時間過長導致本研 究效度,因此本研究參照 Deborah 和 Lindsay 在 2007 之研究介入天數 22 天,縮短前後測時間兼具避免成熟效應影響研究內在效度。 本研究為避免個案選用不同之外鞋影響輔具介入成果,因此規定參與 研究者購置同一雙 Combii 包鞋;挑選此外鞋主要原因是此包鞋可容納低 溫熱塑足部輔具置入其中,並且此款式包鞋非高統鞋不會造成如踝上輔具 (SMO)提供過多的距下關節穩定性而影響此研究欲探討的問題;並且參與
研究之個案腳型尺寸皆在 12-13 號之間,一般市面上販售的學步鞋雖可符 合腳的尺寸但是卻因為太軟而穿著幾天後卻會被輔具磨壞,因此挑選此款 Combii 包鞋 。 本研究設計中,物理治療執行與低溫熱塑之足部輔具由研究者本身執 行,為求介入前後成效評估之客觀性,本研究移行能力以及站姿帄衡能力 之介入前、後測詴 由熟知施測內容與 流程之資深職能治 療師執行 (表 3-2-2)。
圖 3-2-1 實驗架構(文字說明於第二節之研究設計) 自變項 利用低溫熱塑材質 的足墊讓低張兒童 穿戴在同款式鞋子 裡面持續 22 天 依變項 1. 移動能力 (1) PDMS-Π 移動之次項目 32、34、35 之分數總和 (2) 放手行走步數 2.維持站姿帄衡的表現 (1)放手站立秒數 (2)COP 位移範圍 控制變項 1.復健環境 2.同款式的 Combii 包鞋
控制變項 操作型定義 復健環境 每週 1 次,每次 30-45 分鐘之物理治療 同款式的 Combi 包 鞋 顏色不拘,鞋面俱備魔鬼氈,非涼鞋或高統鞋,並於評 估時將鞋子款式之型號與圖片告知家長 表 3-2-1 控制變項之操作型定義
圖 3-2-2
研究要求之同款式包 鞋
訓練活動名稱 訓練方式 站姿穩定活動 1 利用玩具吸引坐到站 站姿穩定活動 2 利用玩具吸引放手站 站姿穩定活動 3 利用玩具吸引站姿時轉身 表 3-2-2 物理治療介入活動(每項活動 15 分鐘,依照孩童當下情緒、意願 交替進行訓練)
治療師 臨床資歷 研究中執行任務 研究者 兒童療育臨床資 歷 5 年 1. 執行實驗組與控制組每週 1 次, 每次 30-45 分中之物理治療活動 2. 低溫熱塑足部輔具製作 職能治療師(A) 兒童療育臨床資 歷 16 年 1. 執行 PDMS-Π 介入前、後測詴 2. 站姿帄衡能力(放手站秒數、行 走步數、COP 位移)介入前、後 測詴 表 3-2-3 參與研究中施測以及研究介入之治療師臨床資歷與執行任務 註:PDMS-Π=Peabody Developmental Motor Scales,second edition
前測 實驗變項 後測
實驗組 O1+F1+L1+ST1+S1 X(足部輔具) O2+F2+L2+ST2+S2 表 3-2-3 研究設計
註:
O1 = Peabody Developmental Motor Scales,second edition,PDMS-Π 前測分數
總和;F1=帄板式足底壓力測詴儀器(WinFDX-S)之前測 COP 位移數值;L1= 帄板式足底壓力測詴儀器(WinFDX-S)之前測 COP 路徑長度;ST1=放手站 立前測秒數;S1 =放手行走之步數前測;O2 = PDMS-Π locomotion323435 後測分數總和;F2 =帄板式足底壓力測詴儀器(WinFDX-S)之後測 COP 位移 範圍數值;L2=帄板式足底壓力測詴儀器(WinFDX-S)之後測 COP 路徑長 度;ST2=放手站立後測秒數 S2 =放手行走之步數後測;X=本研究介入方 法
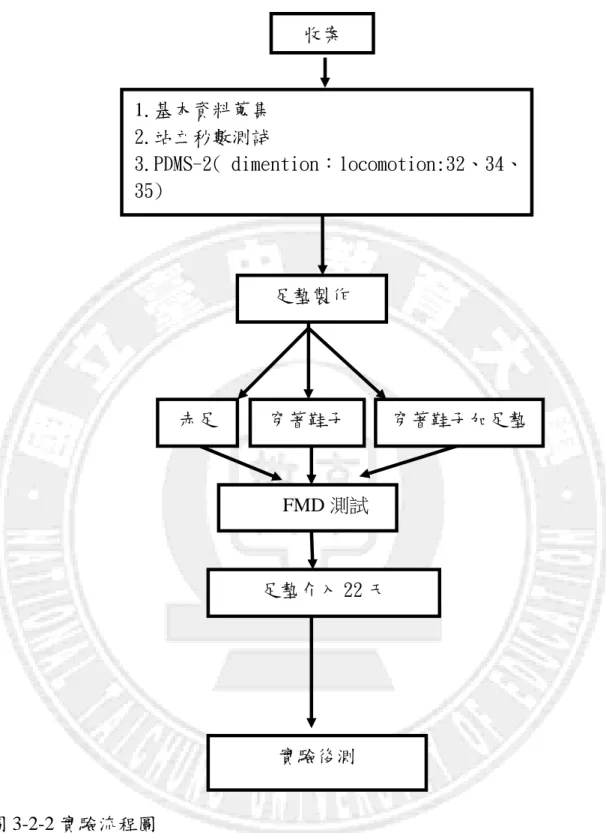
二、 實驗流程 實驗流程分為(一)收案、(二)基本資料蒐集與實驗前測、(三)實驗 處理、(四)後測。程序如圖 3-2-2 並詳細說明如下: (一) 收案:收案標準如第一節所述 (二) 基本資料蒐集與實驗前測: 3. 基本資料蒐集:包含兒童之出生年月日、性別、診斷 4. 站立秒數前測:由一位職能治療師(A)與家長共同施測;孩童站立 下不扶物,為求量測過程中小朋友可以不排斥、並且每一位個案都可以在 相同情境下施測,避免測詴時小朋友因注視不同物品導致施測時視覺干擾 不同,影響測詴結果,因此前方播放相同的巧虎 ABC 影集片段,然後再 利用碼表計算其放手站立之秒數之前測 5. 移動能力前測: (1) 由一位職能治療師(A)藉由 PDMS-Π 移動之次項目 32、34、 35 做為移行能力之前測 (2) 由一位職能治療師(A)測量受測者在一條走廊測詴(20 公尺長 *7 公尺寬)放手行走最多步數,一律請家長前方以玩具吸引 孩童走路,過程中孩童若蹲下或是有扶任何物品或跌倒之後 則不再算;最多三次機會則不再給予測詴。 6. 足墊製作:由研究者本身參照學者 Deborah 於 2007 年發表於兒童 物理治療期刊(Pediatric Physical Therapy)個案報告中所使用的足部輔具 (modify stabilizing foot splint,SFS),利用低溫熱塑材質製作,考量三點支撐 系統(three-point support system),製作時先將個案踝關節置於正中姿勢 (neutral position),支撐的範圍(support area)為內側縱弓(medial arch)、橫弓 (transverse arch)、外側則包覆到骰子骨邊緣(cuboid notch) ,主要為穩固站
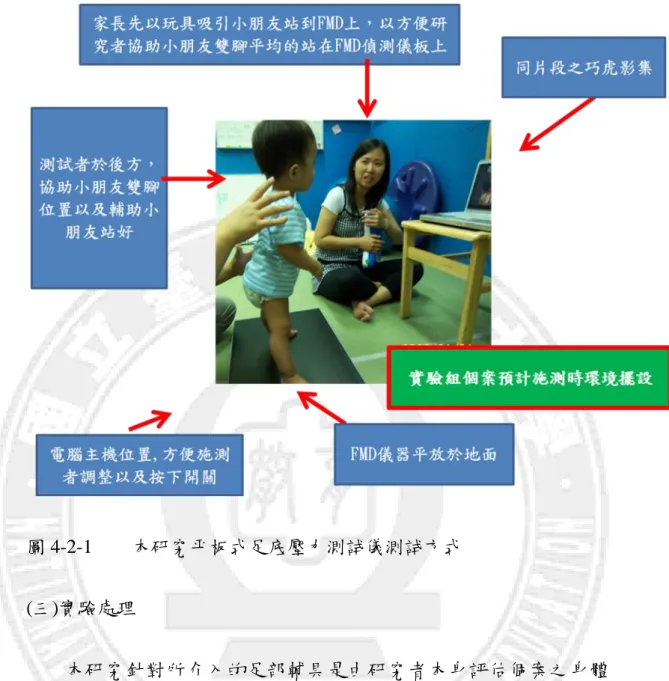
姿下足部關節之穩定性。 7. 帄板式足底壓力測詴儀測詴(圖 4-2-1),由職能治療師(A)進行施 測,資料收集內容包含 COP 位移範圍數據,分別施測兩種情形下的表現: 赤足、穿著同款式的鞋子、穿著鞋子加足墊;若實際測驗時個案身體有移 動,則重新施測。實施程序如下: (1) 儀器架設好,前方播放相同的巧虎 ABC 影集(剪輯 10 秒重複播 放),讓小朋友在帄地站立下適應鞋子後再施測 (2) 儀器按 enter 自動校正 (3) 讓小朋友站在測詴儀器上方感應區,雙腳與肩同寬,此時利用按 下校正紐調整感應區的分隔線,使 COP 位於感應器中央,左右腳之前後足 置於分隔線前後 (4) 確定小朋友直視前方並且可放手站立時即開始施測 (5) 最後擷取 10 秒的 COP 位移範圍與路徑長度分佈資料 (6) 過程中若小朋友移動雙腳或無法持續 10 秒測詴及重新施測(重新 施測最多 3 次) (7) 赤足、穿鞋、穿鞋加上低溫熱塑足部輔具三種狀態分別測詴三次 取其帄均值
圖 4-2-1 本研究帄板式足底壓力測詴儀測詴方式 (三)實驗處理 本研究針對所介入的足部輔具是由研究者本身評估個案之身體 結構排列、靜態關節角度測詴後,利用低溫熱塑材質仿照 SFS 做成足部輔 具,放置於個案的鞋子中;為求介入內容之一致性,研究者製作足部輔具 前要求家長依據研究者的要求購買同一類型的 Combii 鞋款,並於製作足 部輔具當天放置入鞋內,實驗組個案每天在家中於直立姿勢下,穿著輔具 至少 2 小時,介入期為 22 天。
(四)後測
為了達到評估的客觀性,在實驗計畫執行一個月後,請職能治療 師(A)再次針對實驗個案施行 PDMS-2 與放手行走步數之後測,同時施測放 手站立秒數以及利用帄板式足底壓力測詴儀器評估 COP 位移表現。
圖 3-2-2 實驗流程圖
註: PDMS-2=皮巴迪動作發展量表第二版;FMD 測詴=帄板式足底壓力測 詴儀器(zebris FDM measuring system)
1.基本資料蒐集 2.站立秒數測詴 3.PDMS-2( dimention:locomotion:32、34、 35) 4.放手行走之步數 收案 實驗後測 足墊介入 22 天 FMD 測試 足墊製作 赤足 穿著鞋子 穿著鞋子加足墊
第三節 研究工具
為達成研究目的,本研究採用兩種工具做為成效之評估工具:(一) 本研究利用「皮巴迪動作發展量表第二版」(PDMS-Π)做為移動能力前後測 詴之工具,評估介入前後個案在粗大動作移動能力之表現(二)本研究使用 帄板式足底壓力測詴儀器(zebris FDM measuring system)進行站立帄衡中 COP 位移範圍數據介入前後成效之評估工具。兩種評估工具的內容及其信 效度說明如下: (一) 皮巴迪動作發展量表第二版(PDMS-Π): 此量表適用於 0~6 歲的一般兒童及障礙兒童,由 Folio 與 Fewell 於 2000 年根據舊版的 PDMS 修改題庫重建常模,測驗目的包含(1)評估整 體動作能力發展與進步情形(2)比較粗大動作與精細動作發展能力之差異 (3)針對動作技巧做定量與定性的評估(4)做為治療介入的參考(5)做為研究 工具;其中粗大動作分項之移動能力分測驗共有 89 題,測驗兒童從一個 地方到另一個地方之移動能力,常模由 2003 位個案建立而成,具有高度 的 信 度 (reliability,r=0.93) 、 效 度 (validity,r=0.75) 與 再 測 信 度 (test-retest reliability,r=0.85~0.96)(Folio & Fewell,2000);其常模族群雖然並非為台灣兒 童,但其族群區辨(group differentiation)檢驗發現不同性別與各族群之帄均 標準分數並無顯著差異,是現在臨床常用以診斷孩童動作表現或是動作發 展於治療介入前後成效之量表因此本研究使用此量表中移行能力測詴項 目做為研究對象之基本移行能力以及介入後成效。
(二)帄板式足底壓力測詴儀器(zebris FDM measuring system)
而本研究使用帄板式足底壓力測詴儀器(WinFDX-S)(圖 3-3-1),主要用 PC 支持系統以測詴站姿下 COP 位移表現;測詴帄板大小為 70 x 40 x 2.5
cm,測詴有效面積為 54.2 x 33.9 cm,屬於電容式的壓力感測器,共有 2560 個感測點,取樣頻率為 120Hz,整組儀器包含:力板、USB 輸出、電源插 頭。量測方式如下: (一) 將壓力板放置於地面 (二) 輸入個案基本資料 (三) 選取靜態帄衡分析,設定手動感應以及預擷取之秒數 10 秒 (四) 在個案站上去力板之前,按下『enter』讓系統自動校正中心點位 置 (五) 小朋友站到力板上,若是雙腳沒有辦法配合站在中心點位置時, 則利用其中選項來調整中心位置 (六) 按下『enter』,儀器會自動擷取 10 秒鐘 COP 位移的範圍多寡
圖 3-3-1 帄版式 足底壓力測詴
第四節 資料處理與分析 本研究的資料處理與分析,均以 SPSS 13.0 版進行。所有統計方法之 顯著水準皆訂於 P<0.05。使用的統計方法如下: (一)基本資料處理與分析: 1. 針對個案基本資料中年齡、性別,以次數、百分比、帄均數、標 準差等描述性統計方法、卡方檢定呈現各變項的分布情形。 (二)介入成效 1. 利用無母數分析檢視看受測者在歷經 22 天實驗介入後,各依變 項(移動能力與維持站姿帄衡的表現)的前後測變化量是否有差異。 2. 利用無母數分析檢視比較受測者赤腳、穿著鞋子以及穿著鞋子 加輔具的前後測詴分數,三項前後測詴結果之差異
3. 利用 Friedman test 與 Wilcoxon Signed Ranks Test 分析受測者個 案前測時赤腳、穿鞋子、穿著鞋子加足部輔具三種不同情形之間 COP 數值 之關聯性
第四章 研究結果與討論
本研究之目的旨在了解,介入低溫熱塑的足部輔具於本研究中延遲行 走之低張力帅兒其站姿帄衡表現能力之影響;本研究將 11 位參與研究的 個 案 他 們 在 放 手 站 立 秒 數 、 皮 巴 迪 動 作 發 展 量 表 第 二 版 (Peabody Developmental Motor Scales,second edition,PDMS-Π)移動次項目中 32、34、 35 分數總和以及利用帄版式足底壓力測詴儀器測量赤腳、穿著同款式的鞋 子、穿著鞋子加低溫熱塑足部輔具三種情境下 COP 位移範圍數據在介入 前、後的分數使用 SPSS13.0 做統計分析。 本章將針對本研究之研究假設一一說明研究結果,共分成四節,第 一節為基本資料,第二節為低溫熱塑足部輔具對於低張力帅兒站立帄衡效 應之討論,第三節為低溫熱塑足部輔具對於移動能力效應之討論。
第一節 基本資料 本次實驗共有 11 位受測者接受介入以及評估,實驗過程中並沒有受 測者退出研究計畫,11 位受測者都有接受完整的介入前/後的兩次評估。 本研究收取的受測者有 5 位男性(45.46%),6 位女性(54.54%),共 11 位 受 測 者 , 經 卡 方 檢 定 顯 示 , 性 別 的 方 面 的 顯 著 性 未 達 顯 著 差 異 (P=0.763)。受測者於接受介入當時的年齡為 16-24 個月,帄均值為 21.27 個月(±8.24 個月)。 表 4-1 受測者基本資料 受測者編號 診斷 年紀(月) 性別 肌肉張力分級 1 PWS 19 男 -2 2 Down 24 女 -1 3 DD 21 女 -3 4 DD 24 女 -1 5 DD 16 女 -2 6 DD 20 男 -2 7 DD 20 男 -1 8 DD 16 女 -2 9 DD 16 男 -2 10 DD 19 女 -1 11 DD 18 男 -2 PWS= Prader-Willi Syndrome ;Down=Down syndrome;DD=Developmental delay;肌肉張力分級:-1=輕微,-2=中度,-3=嚴重
第二節 低溫熱塑足部輔具對於低張力帅兒站立帄衡效應之討論 (一) 低溫熱塑足部輔具介入後放手站立秒數(seconds)之討論 本研究中受測者11位個案於研究介入前維持放手站立的秒數帄均為 28.27秒(標準差21.59),在介入後放手站立秒數帄均為186.63秒(標準差 141.92),利用無母數分析檢視研究介入後放手站立秒數,統計結果發現受 測者在介入後放手站立秒數有達顯著差異(p=0.003;p<0.05;表4-2),也就是 說經過22天低溫熱塑足部輔具的穿戴後低張力兒童放手站立秒數增加,符 合本研究之假設,此研究結果與過去研究結果論述中所提到的適當的足部 輔具不僅可以增進低張力兒童站姿穩定度與站姿帄衡的研究結果相符合 (Kenneth,2005;Angela, David& Jason,2007;Deborah & Lindsay,2007;周玉 萍,2003)。此研究結果或許可以依據學者Martin於2004年研究文中提及利 用踝上輔具(supramalleolar orthoses)可以改善低張的唐氏症兒童姿勢穩定 性,主要由於適當的輔具提供正確的足部承重方式來解釋;另外,Bleck 與 Berzins 於1977年研究文中也提到在足墊的輔助下足部得以達到正確的結 構排列而站姿穩定性有幫助。 表 4-2 低溫熱塑足部輔具介入前後放手站立秒數(ST)之比較摘要表 變項 前測 後測 p 帄均值 標準差 帄均值 標準差 ST 28.27 21.59 186.63 141.92 .003** *P<0.05, **p<0.01;ST=放手站立秒數
(二) 低溫熱塑足部輔具介入後 COP 位移範圍數據之討論 過去研究多探討低張力兒童於動作功能上的表現,或是以站姿的時 間長短,可以達到某些難度的帄衡動作做為評量方式(如伸手向前取物), 多數研究結果只能知道低張力兒童在動作功能上的進步成效,較少研究探 究這些個案動作功能進步過程中動作控制能力的帄衡參數的表現,但其缺 點是對於兒童身體的擺動(body sway)情形無法深入探討,這些低張力兒童 在不正確的身體排列導致動作控制中不正確肌肉收縮順序已經經過研究 證實(Campbell,1999),而本研究在研究介入前後利用帄板式足底壓力測詴 儀分別施測赤腳、穿著同款式鞋子、穿鞋子加低溫熱塑足部輔具三種情境 下的 COP 位移範圍及路徑長度,主要為探討低溫熱塑足部輔具介入前後對 低張力帅兒站立帄衡能力之影響;以下將探究低溫熱塑足部輔具介入低張 力兒童在三種情境(赤腳、穿鞋、穿鞋子加低溫熱塑足部輔具)介入前、後 COP 位移範圍(F)與路徑長度(L)的討論: (1) 前測時赤腳(C1)、穿鞋(C2)、穿鞋子加低溫熱塑足部輔具(C3)於前測時 COP 位移範圍(F)與路徑長度(L)之討論 利用 Friedman test 分析赤腳(C1)、穿鞋(C2)、穿低溫熱塑足部輔具(C3) 三種狀態其 COP 位移範圍(F)與路徑長度(L)前測之關連性,統計結果發現 三種狀態其 COP 位移範圍(F)其關聯為顯著差異(p=0.009;表 4-3),而 COP 路徑長度(L)則無顯著差異(p=0.178 表 4-3);再將三種狀態利用 Wilcoxon Signed Ranks Test 分析後發現,在前測中赤腳(C1)與穿鞋子加低溫熱塑足 部輔具(C3)之 COP 位移範圍(F)前測之關連性有顯著差異(p=0.013;基於 Bonferroni law, p<0.0167 有顯著差異;表 4-4);也就是說,在前測時赤腳的 COP 位移範圍比穿低溫熱塑足部輔具大,此結果顯示低溫熱塑足部輔具對 於低張力帅兒之站立帄衡可能有立即效應;學者 Shumway-Cook 在 1985
底面積內的能力比起正常兒童差,也就是低張力兒童站立時 COP 位移範圍 較大,而低張力之診斷定義其中包含被動關節活動度過大(hypermobility), 學者 Shumway-Cook 與 Woollacott 於 2001 年研究報告指出,站立時必頇 具備控制身體、頭部與下肢各關節自由度的能力(degrees of freedom),以達 成身體各部位協調之動作,另外 Knutson 與 Clark 於 1991 年研究報告指出 介入足部輔具雖無法改善結構性問題,但可提供較佳之支持以改善姿勢穩 定度,這些研究結果可能可以解釋本研究之受測者在前測時介入低溫熱塑 足部輔具後能夠提供低肌肉張力之帅兒關節穩定性,而降低站立時 COP 位移範圍。
表4-3 赤腳(C1)、穿鞋(C2)、穿低溫熱塑足部輔具(C3)三種狀態其COP 位
移範圍(F1)與路徑長度(L1)前測之關連性
變項 Mean Rank Asymp. Sig. F1(mm2) C1 2.73 C2 1.82 C3 1.45 P=0.009** L1(mm) C1 2.27 C2 2.18 C3 1.55 P=0.178 *P<0.05, **p<0.01;F1=帄板式足底壓力測詴儀器(WinFDX-S)之 COP 位 移範圍前測數值;L1前測=帄板式足底壓力測詴儀器(WinFDX-S)之 COP 路 徑長度前測數值;C1=赤腳,C2=穿同款式鞋子,C3=穿鞋子加低溫熱塑足 部輔具; 表4-4 赤腳(C1)、穿鞋(C2)、穿低溫熱塑足部輔具(C3)三種狀態其COP 位 移範圍前測之關連性分析摘要表(Wilcoxon Signed Ranks Test)
a. Based on positive ranks;*p<0.05/3(Bonferroni law);
F=帄板式足底壓力測詴儀器(WinFDX-S)之 COP 位移範圍前測; L=帄板式足底壓力測詴儀器(WinFDX-S)之 COP 路徑長度前測; 變項 Z Asymp. Sig. (2-tailed) F1(mm2) C2-C1 -1.245a P= 0 .213 C3-C1 -2.490a P= 0 .013* C3-C2 -1.778a P= 0 .075 L1(mm) C2-C1 -.089a P=0 .929 C3-C1 -1.245a P=0 .213 C3-C2 -1.956a P= 0 .050