國立臺灣大學醫學院暨工學院醫學工程學研究所 碩士論文
Institute of Biomedical Engineering College of Medicine and Engineering
National Taiwan University Master Thesis
輪椅推進時省力把手對上肢生物力學之影響 Effects of Efficient Handles on the Biomechanics of the
Upper Extremities during Wheelchair Propulsion
李佳達 Jia-Da Li
指導教授:呂東武博士
Advisor: Tung-Wu Lu, D.Phil.
摘要
手輪推進式輪椅是最為常見與常用的輪椅,過去許多文獻指出,追蹤長期使 用手輪的患者,有很高的比例產生上肢骨骼肌肉系統的病變,有鑑於過去手輪在 力學上的施力條件不佳,使用者施予手輪的力量並不能完全轉換為驅動輪椅前進 的正向推力,在過去有一項省力把手的專利設計(呂東武 2004),突破手輪施力機 械效益不彰的窠臼,提供一個具有高度機械效益的施力條件。然而這創新思維的 產物過去並沒有任何研究可以佐證它的功效,本研究藉由經由客觀的實驗,從運 動學、力動學一系列的分析,比較並探討省力把手與一般手輪在輪椅的推進過程 中對人體上肢造成的影響。
對於人體上肢的分析,過去的研究已獲致良好的成果,本研究延伸過去的研 究成果,運用過去累積改良的上肢多連桿生物力學模型,並結合全面性皮膚移動 誤差最佳化的方法,將上肢之生物力學分析運用在輪椅推進的議題上,藉由完整 的生物力學分析,比較省力把手與常見手輪推進式輪椅之差異,驗證省力把手之 實質功效。
五位正常受試者,藉由ViconMX 系統與測力輪椅,於實驗過程拍攝 22 顆反 光球及量測手部施力,記錄其運動學與力動學資料,省力把手與手輪各收取五次 的推進行程,於實驗開始前讓受試者練習至熟悉推進方式後始進行實驗。
結果顯示,省力把手有助於降低推進週期中之施力大小,並在軸向產生較大 之力矩,具有較高的推進效率。增加在橫解剖平面(Transverse Plane)的關節活 動度。減少上臂內旋角度。改變施力方式讓腕關節在推進過程由橈側偏移旋回正 中位置。降低沿肢段長軸方向之關節受力,增加肘關節的活動度與屈曲/伸展力矩,
增加腕關節橈/尺側偏移力矩,大幅減少肩關節外展/內收方向力矩。
關鍵字:上肢模型、輪椅推進、省力把手、動作分析
Abstract
Manual wheelchair is the most familiar wheelchair and is most common in use.
According to the research, high percentage of long-term manual wheelchair users may have complications of muscular-skeletal system problems in upper extremities. In consideration of poor stroke efficiency during pushrim propulsion, force applied on pushrim couldn’t fully transform to axial moment to drive wheelchairs. Dr. Lu brought up a patent design of efficient handles in 2004 to improve the shortcomings of pushrim.
This study performed biomechanical analysis including kinematics and kinetics to validate efficacy of the efficient handles. Upper limb model and global optimization method were involved to evaluate accurate and complete kinematics data. Five able-bodied volunteer subjects were recruited. ViconMX system and instrumented wheelchair were used to capture twenty-two infrared-retroreflective markers and measure the applying force during wheelchair propulsion. Five trials were captured during efficient handle and pushrim propulsion, respectively. The subjects were well practiced before the experiments. The results showed less applying force and larger axial moment during efficient handle propulsion. Efficient handle’s stroke efficiency is higher than pushrim. According to the results of kinematics, increasing range of joint rotation in the transverse plane and reducing internal rotation of humerus were found at this study when using efficient handle. Efficient handle also reduces longitudinal joint force and joint moment along the abduction/adduction axis.
Keywords: upper extremity model, wheelchair propulsion, efficient handle, motion
目錄
摘要 ... I
ABSTRACT ... II
目錄 ... III
圖目錄 ... VII
表目錄 ... XIII
第壹章
緒論 ... 1
第一節
輪椅使用族群 ... 1
第二節
省力把手的設計理念 ... 3
第三節
上肢骨骼系統簡介 ... 4
鎖骨 ... 5
肩胛骨 ... 5
肱骨 ... 5
尺骨 ... 5
橈骨 ... 5
胸骨鎖骨關節 ... 6
肩峰鎖骨關節 ... 6
盂肱關節 ... 6
肘關節 ... 6
腕關節 ... 7
第四節
使用手輪推進輪椅可能造成的傷害 ... 7
軟組織的傷害 ... 7
水泡 ... 7
皮膚的擦傷或裂傷 ... 7
腕隧道症候群 ... 8
第五節
研究目的 ... 8
第貳章
研究材料與流程 ... 9
第一節
受試者 ... 9
第二節
動作分析擷取系統 ... 9
三維運動學 ... 9
力動學 ... 11
第三節
測力輪椅與省力把手 ... 11
測力輪椅 ... 12
六軸力規 ... 12
資料擷取系統 ... 13
編碼器 ... 13
測力輪椅元件配置 ... 14
力規量測值校正 ... 15
力規訊號處理 ... 16
輪椅省力把手之設計 ... 18
第四節
實驗設計 ... 19
胸廓曲面資料 ... 19
反光標記點 ... 21
受試者靜態校正 ... 23
肩胛骨定位器與指標器 ... 25
第五節
資料分析流程 ... 26
第參章
運動學分析 ... 28
第一節
輪椅推進週期定義 ... 28
鎖骨 ... 31
肱骨 ... 31
前臂(Model & Elbow) ... 32
前臂(Wrist) ... 32
掌骨 ... 33
第三節
全面性皮膚移動誤差最佳化 (GOM) ... 34
第四節
上肢多連桿機構模型 ... 35
肩部複合關節 ... 36
前臂模型 ... 38
第五節
關節座標系統 ... 41
第六節
關節角度 ... 42
第肆章
力動學分析 ... 44
第一節
輪椅推進力學效益 ... 44
第二節
關節受力與力矩 ... 45
第伍章
結果與討論 ... 48
第一節
關節角度 ... 48
胸骨鎖骨關節 ... 48
肩峰鎖骨關節 ... 49
肩部複合關節 ... 52
肘關節及前臂 ... 56
腕關節 ... 57
第二節
力學效益 ... 59
第三節
關節受力與力矩 ... 72
關節受力 ... 72
關節力矩 ... 76
第陸章
總結 ... 79
第一節
結論 ... 79
第二節
研究限制 ... 79
第三節
未來發展 ... 79
參考文獻 ... 81
圖目錄
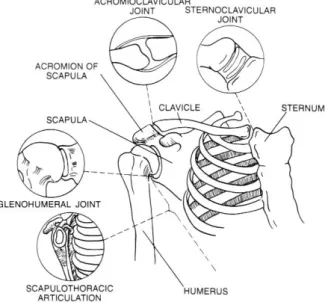
圖1- 1 肩部骨骼構造以及其四個關節(Nordin and Frankel 2001) ... 4
圖2- 1 動作分析擷取系統 ... 10
圖2- 2(左圖)六軸力規與其局部座標系統定義 ... 12
圖2- 3 資料擷取系統,圖片下方為電源線,右側黑色接頭為力規訊號線連接埠, 上方兩個白色為編碼器訊號線連接埠,可接收兩個編碼器的訊號輸入。 ... 13
圖2- 4 編碼器,藉由輪軸之齒輪(尺數 38)驅動編碼器之齒輪(尺數 18)旋轉, 由編碼器pulse 數量可換算輪子旋轉之角度值。 ... 14
圖2- 5 測力輪椅系統配置圖 ... 15
圖2- 6 力規 x 軸訊號與理論手輪/省力把手組件重力值 ... 16
圖2- 7 經過訊號處理與座標轉換後的力規訊號 ... 17
圖2- 8(a)輪椅裝配省力把手完成圖(b)省力把手正視圖(c)省力把手嚙合組 件 ... 18
圖2- 9 省力把手爆炸圖 ... 19
圖2- 10 使用網格的方法取得受試者胸廓的曲面資料 ... 20
圖2- 11 最佳化擬合胸廓曲面後之橢圓 ... 20
圖2- 12 省力把手(左圖)、輪椅(右上)與手輪(右下)反光標記點黏貼位置 ... 23
圖2- 13(a)肩胛骨定位器之形狀;(b)肩胛骨定位器定位肩胛骨骨圖示意圖 .. 25
圖2- 14(a)指標器正視圖;(b)指標器側視圖 ... 25
圖2- 15 資料分析流程圖 ... 27
圖3- 1 輪椅推進過程手部施力點的角度變化及沿軸向方向的力矩圖。縱向實線為 週期開始的時間,虛線為推進階段結束的時間 ... 29
圖3- 2 上肢多連桿機構模型 ... 36
圖3- 3 肩部複合關節之模型。 ... 37
圖3- 4 前臂模型 ... 38 圖4- 1 瞬時施力切線分量與徑向分量示意圖 ... 44 圖4- 2 單一肢段的自由體圖 ... 46 圖5- 1 胸骨鎖骨關節於輪椅推進週期之關節角度變化。一、二行各為手輪與省力 把手資料,第一列為鎖骨相對胸廓前突/後縮角度,第二列為上提/下壓角度,實 線為五位受試者之整體平均值,灰色區域為五位受試者之標準差,縱虛線為推進 週期53%處。 ... 49 圖5- 2 肩峰鎖骨關節於輪椅推進週期之關節角度變化。一、二行各為手輪與省力 把手資料,第一列為肩胛骨相對鎖骨前突/後縮角度,第二列為內旋/外旋角度,
第三列為前傾/後傾角度,實線為五位受試者之整體平均值,灰色區域為五位受試 者之標準差,縱虛線為推進週期53%處。 ... 50 圖5- 3 胸骨鎖骨關節(第一行)及肩峰鎖骨關節(第二行)於輪椅推進週期之關 節角度變化。實線為手輪、虛線為省力把手五位受試者的平均值,縱虛線為推進 週期53%處,統計分析推進週期 0%、53%時若有顯著差異(P<0.05)予以標定»。
... 51 圖5- 4 肩部複合關節於手輪推進過程之關節角度變化。第一列為肩胛胸廓關節角 度,第二列為盂肱關節角度,第三列為肱骨相對胸廓的關節角度,實線為五位受 試者之整體平均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%處。
... 53 圖5- 5 肩部複合關節於省力把手推進過程之關節角度變化。第一列為肩胛胸廓關 節角度,第二列為盂肱關節角度,第三列為肱骨相對胸廓的關節角度,實線為五 位受試者之整體平均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%
處。 ... 54
第三列為肱骨相對胸廓的關節角度,縱虛線為推進週期53%處,統計分析推進週 期 0%、53%時若有顯著差異(P<0.05)予以標定»。 ... 55 圖5- 7 肘關節及前臂旋前/旋後於輪椅推進週期之關節角度變化。一、二行各為 手輪與省力把手資料,一、二列各為肘關節與前臂旋前/旋後角度,實線為五位受 試者之整體平均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%處。
... 56 圖5- 8 腕關節於輪椅推進週期之關節角度變化。一、二行各為手輪與省力把手資 料,一、二列各為屈曲/伸展、尺側/橈側偏移角度,實線為五位受試者之整體平 均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%處。 ... 57 圖5- 9 肘關節、前臂旋前/旋後及腕關節於輪椅推進週期之關節角度變化。實線 為手輪、虛線為省力把手五位受試者的平均值。縱虛線為推進週期53%處,統計 分析推進週期0%、53%時若有顯著差異(P<0.05)予以標定»。 ... 58 圖5- 10 輪椅推進週期手部施力變化,相對輪椅座標系統。一、二行各為手輪與 省力把手資料,一至三列各為 X、Y、Z 軸的分量大小,實線為五位受試者之整體 平均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%處。 ... 60 圖5- 11 輪椅推進週期手部施予相對軸心之力矩變化,相對輪椅座標系統。一、
二行各為手輪與省力把手資料,一至三列各為 X、Y、Z 軸的分量大小,實線為五 位受試者之整體平均值,灰色區域為五位受試者之標準差,縱虛線為推進週期53%
處。 ... 61 圖5- 12 輪椅推進週期手部施予相對軸心之力(第一行)與力矩(第二行)變化,
相對輪椅座標系統。一至三列各為X、Y、Z 軸的分量大小,實線為手輪、虛線 為省力把手五位受試者的平均值。縱虛線為推進週期53%處。 ... 62 圖5- 13 輪椅推進週期手部施力變化,相對瞬時極座標系統。一、二行各為手輪 與省力把手資料,一至三列各為徑向(Fr)、切線方向(Ft)與軸向(Fa)的分量 大小,實線為五位受試者之整體平均值,灰色區域為五位受試者之標準差,縱虛
線為推進週期53%處。 ... 63 圖5- 14 省力把手與手輪推進過程總施力最大值。依序為依序為五位受試者最大 值及整體最大值的平均 ... 64 圖5- 15 省力把手與手輪推進過程總施力平均值。依序為五位受試者及整體的平 均值 ... 64 圖5- 16 輪椅推進週期手部施予相對軸心之力矩變化,相對瞬時極座標系統。一、
二行各為手輪與省力把手資料,一至三列各為徑向(Fr)、切線方向(Ft)與軸向
(Fa)的分量大小,實線為五位受試者之整體平均值,灰色區域為五位受試者之 標準差,縱虛線為推進週期53%處。 ... 65 圖5- 17 省力把手與手輪推進過程軸向力扭最大值。依序為五位受試者最大值及 整體最大值的平均 ... 66 圖5- 18 省力把手與手輪推進過程軸向力扭平均值。依序為五位受試者及整體的 平均值 ... 66 圖5- 19 輪椅推進週期手部施予相對軸心之力(第一行)與力矩(第二行)變化,
相對瞬時極座標系統。一至三列各為X、Y、Z 軸的分量大小,實線為手輪、虛 線為省力把手五位受試者的平均值,縱虛線為推進週期53%處。統計分析推進週 期極值若有顯著差異(P<0.05)予以標定»。 ... 67 圖5- 20 輪椅推進效率於手輪推進階段(週期前 53%)之變化,實線為受試者所 有推進週期之整體平均值,灰色區域為該受試者之標準差。 ... 68 圖5- 21 輪椅推進效率於省力把手推進階段(週期前 53%)之變化,實線為受試 者所有推進週期之整體平均值,灰色區域為該受試者之標準差。 ... 69 圖5- 22 輪椅推進效率於推進階段(週期前 53%)之變化。實線為手輪、虛線為 省力把手五位受試者的平均值。 ... 70
圖5- 24 省力把手與手輪推進效率平均值。依序為五位受試者及整體的平均值,
統計分析若有顯著差異(P<0.05),則予以標定»。 ... 71 圖5- 25 上肢關節受力於手輪推進週期之變化,一至三列各為肩、肘、腕關節三 軸向之關節受力。肩關節相對胸廓座標系統,肘關節相對上肢模型前臂座標系統,
腕關節相對前臂座標系統。實線為五位受試者之整體平均值,灰色區域為五位受 試者之標準差,縱虛線為推進週期53%處。 ... 73 圖5- 26 上肢關節受力於省力把手推進週期之變化,一至三列各為肩、肘、腕關 節三軸向之關節受力。肩關節相對胸廓座標系統,肘關節相對上肢模型前臂座標 系統,腕關節相對前臂座標系統。實線為五位受試者之整體平均值,灰色區域為 五位受試者之標準差,縱虛線為推進週期53%處。 ... 74 圖5- 27 上肢關節受力於輪椅推進週期之變化,實線為手輪、虛線為省力把手五 位受試者的平均值。一至三列各為肩、肘、腕關節三軸向之關節受力。肩關節相 對胸廓座標系統,肘關節相對上肢模型前臂座標系統,腕關節相對前臂座標系統。
縱虛線為推進週期53%處,統計分析特定週期時間若有顯著差異(P<0.05),則予 以標定»。 ... 75 圖5- 28 上肢關節力矩於手輪推進週期之變化,一至三列各為肩、肘、腕關節三 軸向之關節受力。肩關節相對胸廓座標系統,肘關節相對上肢模型前臂座標系統,
腕關節相對前臂座標系統。實線為五位受試者之整體平均值,灰色區域為五位受 試者之標準差,縱虛線為推進週期53%處。 ... 76 圖5- 29 上肢關節力矩於省力把手推進週期之變化,一至三列各為肩、肘、腕關 節三軸向之關節受力。肩關節相對胸廓座標系統,肘關節相對上肢模型前臂座標 系統,腕關節相對前臂座標系統。實線為五位受試者之整體平均值,灰色區域為 五位受試者之標準差,縱虛線為推進週期53%處。 ... 77 圖5- 30 上肢關節力矩於輪椅推進週期之變化,實線為手輪、虛線為省力把手五 位受試者的平均值。一至三列各為肩、肘、腕關節三軸向之關節受力。肩關節相
對胸廓座標系統,肘關節相對上肢模型前臂座標系統,腕關節相對前臂座標系統。
縱虛線為推進週期53%處,統計分析特定週期時間若有顯著差異(P<0.05),則予 以標定»。 ... 78
表目錄
表2- 1 反光標記點黏貼位置 ... 22 表2- 2 靜態校正流程 ... 24 表3- 1 關節座標系統尤拉角旋轉順序一覽表 ... 43
第壹章 緒論
第一節 輪椅使用族群
輪椅是一項極為方便,利用身體上肢尚有的功能,彌補下肢因功能障礙而無 法自由行動而發展出來,用以代步的常見輔具。使用的族群相當廣泛,舉凡看護 照顧、開刀或受傷而暫時行動不便、或是罹患疾病、車禍或其他事故導致長期下 半身癱瘓的患者,都會需要用到輪椅作為代步的工具。
當患者必須使用輪椅代步,且輪椅本身不具備動力,在使用過程無他人協助,
需獨自依靠上肢的力量驅動輪椅前進後退時,會因為輪椅本身的設計、患者的使 用習慣,而有不一樣的施力形態。不正確的設計或不良的習慣,在驅動輪椅的使 用過程會造成上肢施力的浪費,施力一部分的分量並沒有貢獻在輪椅的移動上;
而過多的施力,意味著肌肉必須額外收縮產生更多的力量。不良的習慣在施力的 過程可能會讓關節處於不利的姿勢下受力。
從關節層面的受力觀點而言,肌肉收縮會對關節產生力矩,這力矩主要由外 界對肢段施予的外力對關節所產生的力矩來平衡。然而肌肉收縮時相對關節中心 的有效力臂遠小於外力相對關節中心的力臂長度,在這層機構的限制條件下,為 了抵抗外力的作用,或為了增加對外界的施力,肌肉必須以數倍、甚或數十倍的 力量收縮才能達到對應的力平衡。這強大的收縮力量,最先由連接肌肉與骨頭的 肌腱(Tendon)來承受,而由任兩個肢段所構成的關節,面對的是動作過程多條 肌肉同時收縮所造成的複合應力(Combine loading),當肌肉收縮的力量過大,會 增加關節面承受的壓應力(Compression stress),導致關節活動過程的摩擦力增加。
群(Carpal tunnel syndrome, CTS)、手肘腱炎(Elbow tendinitis)及手肘滑液囊炎
(Elbow bursitis)。這些病變的成因,可能即是來自於不良的輪椅設計與不當的施 力習慣。而這些患者原先已仰賴上肢尚存的功能性來操控輪椅彌補下肢功能性的 不足,尚且必須負擔日常生活的其他功能性動作,若是再因長期使用輪椅而造成 上肢功能受損,無疑更加威脅到患者日常生活的品質與便利性。有鑑於此,過去 許多上肢的研究從各個角度,嘗試探討這些造成上肢骨骼肌肉系統病變的成因,
而在輪椅的設計上,也試圖採用更加符合人體工學,減少施力的理念去改良與設 計。
目前廣泛常見的手輪推進式輪椅,是在接地輪的外側,安置一同軸但直徑較 小的手輪供患者操縱。手輪與接地輪是剛性固定,無相對旋轉。操作上旋轉手輪 即會同步旋轉接地輪,藉由接地輪的旋轉帶動輪椅的前進後退。這樣的設計好處 是操控上相當直覺,手抓著手輪旋轉即等效旋轉輪椅的兩個接地輪,像是雙手可 以直接控制輪椅的雙腳一般。但從力學的觀點來看,每一次手腕要施力推輪椅時,
為了取得足夠的摩擦力,必須要有一個正向力來穩定手部與手輪之間的位置,讓 手部在推動輪椅前進後退的過程中,與手輪之間不會產生相對滑動。這意味著,
手掌面施力在手輪的過程,必須兼具兩項目的,一是產生一個沿著軸向的力矩驅 動輪子旋轉,帶動轉椅移動,二是施予一個正向力讓手掌面與手輪間產生足夠的 摩擦,不至於打滑。第一項分力是輪椅推進過程必須施的力,第二項分量則是為 了讓輪椅移動不得不額外施加的力,但這個分力的方向會指向手輪軸心,在軸向 上不會產生任何的力矩,對於輪椅的移動不具任何的貢獻。卻會對上肢的骨骼肌 肉系統在施力上有更大的負擔,有鑑於此,過去提出了一項專利設計(呂東武 2004),其目的是為了讓輪椅的使用者可以更省力、更有效率的方式施力,驅動輪 椅的前進,在不用大幅更動輪椅結構設計的前提下,採附加的方式,將改良過的 把手組裝在手輪的轉軸上,取代原本手輪的位置,提供輪椅使用者有別於手輪但 更加易於施力的解決方案。
第二節 省力把手的設計理念
由於現代人的生活、科技水準都日漸提高,對於各種健身器材、及人體輔助 器具的效能要求更是驚人地一再提昇,而輪椅產品對於腳部下肢受傷、或下半身 肢體殘障者而言,更是各種生活輔助器材中不可或缺的一項產品。目前一般所見 的健身輪型車、及醫療輪椅等器材均十分多樣化。然而,由於輪型車帶動結構設 計上的限制,所以,健身輪型車、及醫療輪椅是否容易操作、作動效率是否良好 以及能否符合人體工學,成為消費者最為重視的特色項目。因此,如何開發出一 種容易操作、高作動效率且符合人體工學的輪型車帶動結構,早已變成是研發者 與製造商最想克服的幾個問題。
開發省力把手之首要目的,在於提供一種具有最佳作動效益的輪椅帶動結構 改良,其原理係樞組在手輪轉軸上,並利用上方具雙向帶動機構的手柄配合下方 的復位配重,讓輪椅的操作者往復推動手柄後帶動該手輪,直接產生十分有效率 的切線力量,進而在最佳作動效益的情況下帶動輪椅者(省力把手的設計,請參 閱第貳章第三節,輪椅省力把手之設計)。
次要目的,在於提供一種可直接附加在一般輪椅上操作的帶動結構改良,其 原理採附加方式將整體直接樞組在輪椅二側手輪的轉軸上,藉此可以任意隨使用 者需求拆組。
省力把手附加的設計理念,在於提供一種符合人體工學的輪椅帶動結構改良,
由於其原理係運用手柄往復推動後帶動該手輪,且該手柄係直接組設在符合人體 施力、操作的位置,操作者更無需進行斜向推動,而可以更簡便的操作直線運作。
第三節 上肢骨骼系統簡介
在探討上肢的生物力學前,首先必須對上肢的骨骼系統有一定的瞭解。上肢 包含許多骨頭與關節,較主要的有鎖骨(clavicle)、肩胛骨(scapula)、肱骨
(humerus)、尺骨(ulna)以及橈骨(radius)。骨頭之主要功能為提供軟組織堅 硬的支撐並且與關節共同形成連桿機構,另一方面提供韌帶、肌肉或肌腱之附著。
在關節部分,由身體軀幹、鎖骨、肩胛骨與肱骨所形成的肩部複合關節,其 包含了連結胸廓與鎖骨的胸骨鎖骨關節(sternoclavicular joint, SC joint)、連結鎖 骨與肩胛骨的肩峰鎖骨關節(acromioclavicular joint, AC joint)、連結胸廓與肩胛 骨的肩胛胸廓關節(scapulothoracic joint, ST joint)及連結肩胛骨與肱骨的盂肱關 節(glenohumeral joint; GH joint)。前臂由尺骨與橈骨所構成,與肱骨構成肘關節
(elbow joint),末端與掌骨構成腕關節(wrist joint)。關節可允許有限度之活動,
影響其活動度之因素包含骨頭之間幾何形狀吻合程度、韌帶穩定度以及周圍肌肉 所提供之動態穩定度。而其中鎖骨、肩胛骨以及肱骨三塊骨頭,藉由盂肱關節以 及肩峰鎖骨關節連接,再透過胸骨鎖骨關節以及肩胛胸關節連接至軀幹(圖1-1)。
藉由這三塊骨頭以及四個關節之連接,主要負責整個肩部複合關節之運動。
圖1- 1 肩部骨骼構造以及其四個關節(Nordin and Frankel 2001)
鎖骨
鎖骨是一塊長且些微彎曲的骨頭,從前方觀察趨近直線,由上方則為 S 形。
其連接軀幹與上肢,與胸骨形成胸骨鎖骨關節,與肩胛骨之骨連結處形成肩峰鎖 骨關節。
肩胛骨
肩胛骨是一塊三角形的扁平狀骨頭,位於軀幹後側方,大約第二至第四肋骨 之間,並且為許多肌肉之附著處。其上共有兩個突起:喙突(coracoid process)
與肩峰角(acromion)。肩胛骨與胸廓之間有許多肌肉連接,並且無骨連接處,一 般假想肩胛骨與胸廓之間有一關節連接,是為肩胛胸廓關節。肩胛骨上有一淺窩,
是為肩盂(glenoid),肱骨頭與肩胛骨在此形成盂肱關節。
肱骨
肱骨是上肢骨骼中最大的骨頭。為一長骨,近端球狀之肱骨頭與肩胛骨之肩 盂相接,形成盂肱關節,遠端與橈骨(radius)和尺骨(ulna)相接,共同形成肘 關節。肱骨之骨突包括三角肌粗隆以及內、外上髁。
尺骨
尺骨為一長骨,其近端之形狀類似水管與肱骨遠端之幾何形狀吻合,透過肱 尺關節(humeroulnar joint)與肱骨相接,並且與橈骨共同組成前臂之骨頭,可共 同做旋前(pronation)、旋後(supination)之動作。
橈骨
(proximal radioulnar joint),與肱骨形成肱橈關節(humeroradial joint)。遠端透過 腕關節與手掌相接。
胸骨鎖骨關節
胸骨鎖骨關節是一鞍形的滑液關節,一般認為是具有三個自由度的球窩關節
(ball-and-socket joint)。胸骨鎖骨關節連接胸骨與鎖骨,是軀幹與上肢唯一之骨 連接處。此關節之穩定仰賴韌帶(前、後胸骨鎖骨韌帶)與關節板。
肩峰鎖骨關節
肩峰鎖骨關節是一個平面滑液關節,大約位於自肩峰角之最外側起算,往內 側約二至三公分處。此關節內有一個不完整的關節內盤(intra-articular disc),因 此比胸骨鎖骨關節更容易退化性變化而到關節炎。
盂肱關節
基本上,盂肱關節是一個球窩關節,但實際上關節面幾乎無法提供穩定關節 的作用。由於肩盂腔(glenoid cavity)及肱骨頭之間幾何的差異過大,導致先天 上的不穩定。在肩膀活動時,不管在那一個位置,約只有三分之一的肱骨頭被肩 盂所覆蓋。因此必須由靜態及動態的軟組織來提供肩部所需的穩定性,這些組織 包括盂唇(labium)、關節囊(capsule)、肩盂肱骨韌帶(glenohumeral ligament),
及周圍之肌肉。
肘關節
肘關節之關節囊內含有三個關節﹕肱尺關節、肱橈關節與橈尺近端關節。一 般認為,肱尺關節為一完美之樞紐關節,而橈尺近端關節可做旋前/旋後運動。
腕關節
腕關節之關節面由橈骨下端、尺骨下端的關節面形成關節窩,手掌之腕骨近 側列共同組成,可以做屈曲、伸展與環轉運動(circumduction)。
第四節 使用手輪推進輪椅可能造成的傷害
軟組織的傷害
這是輪椅使用者最常發生的傷害,常見於肩膀、手肘、手腕、及手;多發生 於從輪椅掉落、身體的碰撞、肌肉撕裂、肌肉的過度使用、缺乏足夠的熱身、或 是不適當的推輪椅技巧等;預防方法為有足夠的伸展、充分的熱身及預防性的貼 紮、護具(如手套)、與在輪子上加軟墊等。
水泡
為第二常見的輪椅傷害,多發生於手及手指;手部的水泡,因皮膚與輪椅輪 緣或輪胎接觸摩擦而引起;背部和輪椅靠背間的摩擦也會產生水泡;而操作錯誤 或是輪椅不適當也會因異常的摩擦而產生水泡。水泡雖個是輕微的問題,但若發 生在手部,則對輪椅使用者來說,是其動作上的一大障礙。預防方法為使皮膚產 生硬繭、貼紮手指、戴手套護具、穿有袖的ㄒ恤、矯正姿勢、選擇合宜的輪椅等。
皮膚的擦傷或裂傷
或穿戴護具外,可在輪子外加一彈性的保護墊,預防手被兩輪椅夾住;另外,選 擇一合適的輪椅也是必須的。
腕隧道症候群
所謂腕隧道是指腕骨所形成的凹槽與韌帶組合成的一方形空間,中間穿過由 前臂通往手掌的正中神經與屈腕肌肌腱。由於通過腕部的正中神經受到壓迫,在 手腕、手掌及手指出現麻痺及疼痛,特別是當掌根與輪椅接觸用力時更加明顯;
其造成的原因很多,諸如月狀骨的脫位、滑膜炎或腕部受傷所引起的腫脹,過度 使用等等。
第五節 研究目的
運用一個可量測輪椅推進過程手部施力大小的測力輪椅進行完整的生物力學 分析,過去並沒有太多相關的研究。而將上肢多連桿模型運用在上肢功能性動作 的分析在本實驗室過去亦未奠定深厚的基礎。驗證省力把手的設計,並比較與手 輪兩者在輪椅推進過程中上肢的受力型態是從未做過的研究。本研究旨在運用上 肢生物力學模型與測力輪椅,獲得完善的運動學與力動學資料,結合過去實驗室 動作分析的基礎,分析比較常見的手輪與設計改良過的省力把手,在輪椅推進過 程中,兩者對於上肢生物力學上的差異。以驗證省力把手之實質功效。
第貳章 研究材料與流程
本章旨在說明實驗過程中會用到的儀器設備、實驗內容與流程、並概述實驗 結束後,整體的分析流程。
第一節 受試者
本研究選取5 位正常人進行推輪椅之生物力學研究,參與實驗之受試者無任 何上肢神經骨骼肌肉系統相關之疾病,平均身高170(4.4)公分,體重 62.8(3.6)
公斤,手長72.4(3.3)公分。在實驗之前向受試者解說實驗流程與目的。受試者 於熟悉輪椅之推進過程後始開始實驗。預留足夠的長度讓受試者將輪椅推至穩定 之速度始開始收取資料。手輪與省力把手各收取五次直線向前推進。
第二節 動作分析擷取系統
三維運動學
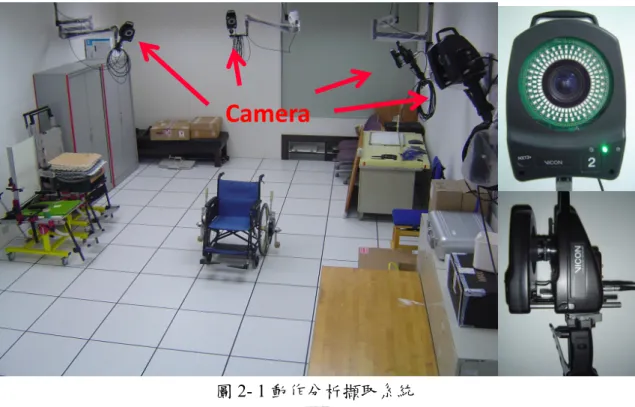
為了得知上肢各部肢段在輪椅推進過 程的運動學資料,使用 ViconMX
(Oxford Metrics Ltd., Oxford, England)動作分析擷取系統,配備六台新型 MX13+
Camera(圖 2-1),可即時輸出每顆反光球在影像中的圓心位置,取樣頻率在全解 析度最高可達500Hz,每部攝影機鏡頭旁均會連接紅外線頻閃器(Strobe),讓黏 貼於皮膚上特定位置之反光球可以反射足夠亮度的紅外線讓攝影機拍攝到,所有 攝影機的訊號經由 Vicon 資料站同步接收後,作為後續三維座標位置重建的依 據。
圖2- 1 動作分析擷取系統
立體攝影術從二維影像重建三維空間座標的方法必須先做系統的校正,區分 為靜態與動態兩種,使用5 Marker Wand & L-Frame 校正棒。靜態校正的目的有 三種:一、訂定實驗室(Global)座標系統的原點;二、設定力板在空間中的位 置;三、找出攝影機在空間中彼此的座標關係,做為後續重建三維座標的基礎。
靜態校正的過程,藉由校正棒放置的位置,來決定座標系統的原點,並透過校正 棒上已知的反光球座標,反求出攝影機在空間中彼此的座標關係,因此每一台攝 影機在實驗前調整的位置必須兼顧拍攝的空間角度是否恰當,與是否能完整拍攝 到校正棒上所有的反光球以做靜態校正。
動態校正的目的是為了校正每台攝影機在拍攝過程,光源透過鏡片的折射會 產生部分扭曲的問題,扭曲的產生與鏡頭本身的關係是固定的,扭曲的多寡與光 源的入射角度有關。由於每次實驗過程攝影機的空間位置與拍攝角度會因為實驗 設計的考慮而有所改變,因此影像中產生扭曲的位置也會跟隨著不同,不能套用 相同的校正參數。因此不同的實驗,不同的攝影機位置,都必須做影像扭曲的校 正。在校正過程,使用5 Marker Wand & L-Frame 校正棒,在實驗過程中預期將 會使用到的三維空間中揮舞,讓每台攝影機得知拍攝的畫面中,影像上不同位置
Camera
的扭曲校正值。
經過靜態與動態這兩項系統校正後,Nexus 系統求得所有必備的校正參數。
在正式的實驗過程,攝影機在畫面中拍攝到的反光球球心位置,透過直接線性轉 換法(DLT:Direct Linear Transform)代入已知的校正參數,可重建出反光球在 三維空間中的座標值。在拍攝過程可能因為受試者的姿勢,或攝影機的角度不良,
無法拍攝到反光球,而前述的DLT 方法,必須至少有兩台攝影機同時拍攝到同一 顆反光球,才能重建出三維空間座標值。
力動學
實驗室過去的研究成果,包含已成功的開發出可量測輪椅推進過程,手部施 力的測力輪椅(Lin 2004)。於其上配備有一六軸力規,放置於推進過程手部施力元 件與接地輪之間,在輪椅的推進過程,手部施予的力量會完全透過力規才傳遞到 接地輪驅動輪椅前進,因此可以完整的量測到手部所施加的作用力與對輪軸產生 的力矩。
第三節 測力輪椅與省力把手
為了計算上肢關節作用力與力矩,過去實驗室開發出可量測輪椅推進時,手 部動態施力過程的測力輪椅,而為了改善傳統手輪機械效益不彰的問題,過去提 出一項專利(呂東武 2004),針對輪椅的施力元件改良所出的省力把手。本章節主 旨在說明測力輪椅之構造、省力把手之設計、量測校正方法以及力學資料的擷取 與分析。
測力輪椅
測力輪椅包含了輪椅(康揚)、六軸力規(Model UFS-45E15A, JR3, Inc., Woodland, CA)、編碼器(RI58, Hengstler, Germany)、資料擷取系統(Wizard, Inc.)。
六軸力規
力規X-Y 軸(in-plane)的最大負載為 1100 N,z 軸(out-plane)的最大負載 為2200 N。最大力矩負載各方向皆為 125 N-M。輪椅推進力產生的力與力矩(Asato, Cooper et al. 1993)皆在力規的最大負載之內。力規被安置在輪椅的膠輪與手輪面 間(圖2-2),除了與手輪面為同一剛體外皆不與其他元件干涉,且力規與膠輪的 相對位置固定,其x、y 軸與輪面平行,z 軸與輪面垂直,與輪子共軸。其輸入電 壓為12V 鉛蓄電池透過變壓器轉換成 110V 驅動電源供應器,輸出為電壓,其訊 號透過一旋轉接頭連接至力規之訊號濾波與放大器,旋轉接頭其主要功能為避免 訊號線因輪子旋轉而扭曲並將訊號傳送到資料擷取系統儲存。後續處理將經由廠 商提供之校正矩陣轉換成力與力矩。
圖2- 2(左圖)六軸力規與其局部座標系統定義
(右圖)六軸力規輪椅配置與輪椅局部座標系統定義 (X 向前、Y 向下、Z 沿輪軸向內)。
X Z Y
Z X
Y
資料擷取系統
16 bit 的記錄器,記錄來自力規的電壓值(Analog)與編碼器的脈衝值(Digital)。
擷取頻率設定為500Hz,其儲存媒介為 Compact Flash Card,於實驗結束後離線將 資料下載至個人電腦,透過同步訊號與Vicon 資料整合,以利後續的分析。
圖2- 3 資料擷取系統,圖片下方為電源線,右側黑色接頭為力規訊號線連接埠,
上方兩個白色為編碼器訊號線連接埠,可接收兩個編碼器的訊號輸入。
編碼器
10000 pulses 之工業規格編碼器,其透過四倍解析角度精確度可高達 0.009°,
編碼器提供輪椅動態過程,力規與輪椅之間旋轉的角度量值,除了用以推算力規 x, y 方向力量的校正值,還可將動態過程力規量測的力量值轉換到相對於輪椅的 座標系統,便於後續逆向動力學的分析。
圖2- 4 編碼器,藉由輪軸之齒輪(尺數 38)驅動編碼器之齒輪(尺數 18)旋轉,
由編碼器pulse 數量可換算輪子旋轉之角度值。
測力輪椅元件配置
如圖2-5 所示,輪椅推進過程,力量透過手輪/省力把手傳遞至力規上。力規 將量測到的訊號經由一旋轉接頭傳至放大器,放大器將處理完的力規訊號輸出至 資料擷取系統。資料擷取系統會同時接收來自力規與編碼器的訊號,同步記錄於 CF 記憶卡中。力規的電力由一顆 12V 的電池經過變壓器轉換至 110V 所提供,資 料 擷 取 資 統 則 由 另 一 顆 12V 的 電 池 提 供 電 力 。 12V 的 電 壓 經 過 穩 壓 IC (MC-7809CT)降轉至 9V 後輸入。編碼器的電力則由資料擷取系統提供。
圖2- 5 測力輪椅系統配置圖
力規量測值校正
校正的原因,其一是由於力規的配置是連接於手輪/省力把手輪子之間,因此 不但會量測到輪椅推進過程手所施予手輪/省力把手的力與力矩,還會額外量測到 手輪/省力把手的重力、質量與轉動慣量在移動與轉動過程對輪軸中心造成的力與 力矩。必須予以扣除以得求得手部的淨施力。在本研究中考慮輪椅推進過程,線 性加速度與角加速度並不大,是故忽略後兩者對力規造成的額外受力,只扣除力 規在X, Y 軸因重力所額外量測到的力。其二是由於力規是固定在輪軸上伴隨輪椅 前進與輪子同步旋轉,因此在輪椅推進過程力規的X, Y 軸方向是不斷在改變的。
為了得知每個瞬間力規局部座標系統的方位,本測力輪椅設置一歸零裝置,透過 編碼器,可以計算出輪椅在歸零後旋轉的角度,並透過校正取得歸零瞬間力規局 部座標系統X, Y 軸方位與輪椅局部座標系統之間的相位角,便可將每一瞬間力規 Handrim / Handle
Wheel
Amplifier
Power Supply
12V Battery Load cell
Data Logger
Encoder Rotary
Connector
12V DC to 110V AC Converter
規一側的輪子使其空轉(正/逆轉),速度盡可能接近輪椅推進過程輪子的旋轉速度,
擷取旋轉十圈的訊號值。使用正弦、餘弦函數個別表示力規在X, Y 軸量測到的力 量,如下式
2 1
) cos(
) sin(
C b
Fy
C a
Fx
+ +
=
+ +
=
φ θ
φ θ
其中a、b 為手輪/省力把手淨重,ψ為初始相位偏差角,C1、C2 為 offset 值。
其中θ為已知,使用最佳化的方法,設計變數為 a、b、ψ、C1、C2,個別找到 最符合實驗資料的參數值,代入作為後續校正所用的基礎線函數(baseline function)。
力規訊號處理
力規的訊號需先將初始未受力時所量測到的值歸零。除了x, y 方向在任何時 刻皆會額外量測手輪/省力把手的重量之外,在 z 軸及三軸的力矩值在輪椅靜止的 況態皆視為不受力狀態,可直接歸零。x, y 軸方向的力訊號,歸零的方法是先從 編碼器獲得當前力規相對輪椅旋轉的角度,代入基礎線函數算出此時在x, y 軸各 自的受力值,扣除理論的受力值剩餘的差值即為歸零所需的校正偏移量。
圖2- 6 力規 x 軸訊號與理論手輪/省力把手組件重力值
load cell Fx signal baseline
力規的訊號,經過歸零後,x, y 軸的力量,再扣除手輪/省力把手組件的重力 值(如圖 2-6 所示),剩餘的力與力矩,即為輪椅推進過程,手部的淨施力。使用快 速傅利葉轉換(Fast fourier transform)找出在頻率域強度最大的頻率,為輪椅推 進過程手部施予手輪/省力把手的頻率值,其值落於 0.8 至 1Hz,使用 Butter worth 濾波器,經測試後設定低通濾波頻率12Hz,可濾除不必要的高頻雜訊,並保留手 部施力時接近原貌的訊號型態,再藉由編碼器所提供的角度量值,將力規量測的 力與力矩值轉換到相對於輪椅的座標系統。沿水平面前進方向為正x 軸方向,重 力方向為正y 軸方向,沿輪軸由外指向內側為正 z 軸方向。經過轉換後,力規所 量測到的力與力矩在相對輪椅座標系統下的值如下圖所示。
圖2- 7 經過訊號處理與座標轉換後的力規訊號
動態過程輪椅的座標系統相對實驗室座標系統的關係藉由黏貼於輪椅上的反 光標記點所定義(圖 2-12),將力規的訊號轉換到相對於實驗室的座標系統,完
Load Cell Data
Fx Fy Fz Mx My Mz
輪椅省力把手之設計
省力把手是採用附加的方式,取代輪椅原本手輪的位置,從輪軸附掛而上的 一項機構設計(圖 2-8a)。把手本體由復位配重塊、支架與握把所構成,透過兩 個滾珠軸承固定於輪軸上並可相對旋轉(圖2-9)。由於復位配重塊的設計,可讓 把手於推進階段結束後,因重力產生的復位力矩而讓把手旋轉恢復到初始位置,
不用額外施加力量。握把與支架間可伸縮調整長度,以符合不同身材尺寸的輪椅 使用族群。
省力把手的旋轉是滑設在環狀手輪的突起導軌上,在導軌內側貼有磨砂紙以 確保足夠之摩擦力,在手推進過程,當握把開始施力使把手機構旋轉時,復位配 重塊會因力臂的增加而增加一反向的扭矩,當固定於握把關節上的彈簧不足以扺 抗這反向的扭矩時便會讓關節旋轉,從而使下方的橡膠片與環狀手輪的導軌接觸
(圖 2-8c),使從握把端施力的力量,經由與環狀手輪剛性的結合,而能將向前 推進的扭矩直接傳遞到接地輪,傳動輪椅前進。當握把端不再施力時,彈簧驅動 桿件復位,鬆開與環狀手輪的結合,把手因復位配重塊的反向力扭而逆轉,回復 到初始位置,完成一個輪椅推進的週期。
(a) (b) (c)
圖2- 8(a)輪椅裝配省力把手完成圖(b)省力把手正視圖(c)省力把手嚙合組件
圖2- 9 省力把手爆炸圖
此省力把手的設計具有幾項優點,一、手部的施力方向近乎於切線方向,手 部的施力藉由機構的傳遞,可達到非常有作動效益的輪椅推進,二、使用者也因 此減少不良施力,不再需要額外的正向力以產生與手輪間足夠的摩擦力或因應手 輪的位置必須讓上肢斜向施力,三、減少上肢骨骼系統系統的負擔。四、輪椅操 作者手臂或衣物不再因為扺靠接地輪體旁邊,而常被輪體磨損、沾汙。
第四節 實驗設計
本節將說明本研究在實驗過程的各個步驟與實驗設計,在後續將會充分運用 實驗過程所獲取的資料做分析。
胸廓曲面資料
第一階段的實驗,先在受試者胸廓黏貼6 顆反光標記點(表 2-1)使用 Vicon
義的胸廓局部座標系統之下。有關於胸廓座標系統的定義,請參見第三章第二節 上肢局部座標系統定義。定義橢圓的三個主軸方向與胸廓座標系統一致,使用最 佳化的方法,找出最符合胸廓曲面的橢圓(圖 2-11)。其三個主要的半徑長,與 相對於胸廓座標系統的座標值。
圖2- 10 使用網格的方法取得受試者胸廓的曲面資料
圖2- 11 最佳化擬合胸廓曲面後之橢圓
反光標記點
在動作分析的過程,會先將人體活動的各個肢段假設為一個剛體。在各個剛 體上黏貼至少三顆反光標記點,追蹤取得動態過程其三維空間的座標值,便可定 義這個剛體的局部座標系統(Local coordinate system),與其在動態過程相對廣義 座標系統(Global coordinate system)的方位(Position and orientation)。透過剛體 上任兩點的相對關係不變的特性,只要知道剛體上任一點相對剛體上局部座標系 統的座標值,與局部座標系統在動態過程相對廣義座標系統的方位,就可以利用 座標轉換描述動態過程剛體上任一點相對廣義座標系統的運動軌跡,也就可以清 楚瞭解整個剛體的運動狀態。
為了獲取手推輪椅的過程,上肢各部肢段的運動狀態,考慮各肢段解剖位置 與ISB 對局部座標系統的定義,黏貼 22 顆反光標記點於各個肢段上,參見表 2-1。
其中肱骨使用四顆技術性反光標記點(Technical marker),透過這四顆反光標記點 的座標可以反求出動態過程對應解剖位置與局部座標系統定義的骨突點位置。手 掌上CM、MP2、MP5 三顆的中點視為輪椅推進過程最接近省力把手或手輪的點,
而PI3 則用於定義手掌肢段長軸方向。
表2- 1 反光標記點黏貼位置 肢段 反光標記名稱 解剖位置 英文名稱
軀幹
SN 胸骨切跡 Sternal notch SB 胸骨體 Sternal Body XP 劍突 Xphoid process
C7 第七頸椎棘突 7th Cervical spinal process T5 第五胸椎棘突 5th Thoracic spinal process T8 第八胸椎棘突 8th Thoracic spinal process
鎖骨
*SC 胸骨鎖骨關節處 Upper edge of sternoclavicular joint CAE 鎖骨前突面 Clavicular anterior convexity CAA 鎖骨前凹面 Clavicular anterior concavity
*AC 肩峰鎖骨關節處 Upper edge of acromioclavicular joint
肱骨
*HLT 肱骨小結節 Humeral lesser tubercle HDT 三角肌粗隆 Humeral deltoid tuberosity HT1 肱骨中前側 Anterior mid-humerus HT2 肱骨中下側 Inferior mid-humerus HT3 肱骨中後側 Posterior mid-humerus HT4 肱骨中上側 Superior mid-humerus
*LEP 肱骨外上踝 Humeral lateral epicondyle
*MEP 肱骨內上踝 Humeral medial epicondyle 尺骨 US 尺骨骨突處 Ulna styloid process
橈骨 RAS 橈骨骨突 Radius styloid process
掌骨
CM 腕掌關節 Carpometacarpal joint
MP2 第二掌指關節 2nd Metacarpalphalangeal joint MP5 第五掌指關節 5th Metacarpalphalangeal joint PI3 第三近端指間關節 3rd Proximal interphalangeal joint
*註 1:只使用 pointer,不貼 marker
*註 2:需先使用 pointer 之後才貼上 marker
為了描述手輪與省力把手在空間中的方位,判別動態過程手掌的施力位置與 求出每一瞬間切線、向心、與軸向三個方向相對實驗室廣義座標系統的關係,在 手輪及省力把手上各自黏貼反光球以便定義座標系統(圖 2-12),並在實驗前先 取得其旋轉中心、手輪半徑及把手施力點相對座標系統的座標值。
圖2- 12 省力把手(左圖)、輪椅(右上)與手輪(右下)反光標記點黏貼位置
受試者靜態校正
運動學資料靜態校正的目的有三個,一是為了取得在靜態時,受試者各肢段 上沒有皮膚移動誤差的反光標記點座標相對關係。用以計算後續上肢多連桿模型 的肢段幾何參數,並做為後續校正皮膚移動誤差的基礎。二是確定剛體上,欲分 析的各個反光標記點與解剖標記點的位置相對關係,用以「補點」或推算解剖標 記點(Anatomical marker)的座標值。以前述肱骨的反光標記點為例,以 ISB(Wu, van der Helm et al. 2005) 建 議 的 局 部 座 標 座 標 定 義 是 使 用 盂 肱 關 節 中 心
(Glenohumeral joint center)與內、外上髁(medial/lateral epicondyle)三個解剖 位置,但盂肱關節中心並無法使用反光標記點來標定,因此為了得知盂肱關節中
在廣義座標系統的動態三維座標值。此外,當動態過程有反光標記點因被身體遮 住或攝影機角度不良而無法重建三維座標時,亦可用相同的方法將消失的反光標 記點推算出來。第三個目的是從正中位置(Neutral position)計算初始的相鄰兩肢 段關節角度,待運動學分析時可視需求來決定是否需要扣掉關節初始角度,藉以 了解受試者在動態運動中的關節活動範圍或是絕對角度變化。
本研究使用迴歸的方法(Sholukha, Van Sint Jan et al. 2009),依據文獻的定義在 靜態校正取得每個肢段的骨突點(表2-2),換算求取胸骨鎖骨關節、肩峰鎖骨關 節、盂肱關節、肱骨滑車(Trochlea)與肱骨小頭(Capitulum)的關節中心位置 相對各肢段局部座標系統之座標值。靜態校正的工具使用指標器與肩胛骨定位器
(圖2-13,14)。
表2- 2 靜態校正流程 貼 Marker (先貼 19 顆) 肱骨
Humerus
pointer_HLT (humeral lesser tubercle)
校正時受試者乘坐輪椅 (推輪椅預備姿勢)
pointer_MEP (humeral medial epicondyle)
pointer_LEP (humeral lateral epicondyle)
鎖骨Clavicle
pointer_CSJ (upper edge of sternoclavicular joint)
校正時受試者維持站姿 (neutral position)
pointer_CAS (anterior edge of sternoclavicular joint)
pointer_CAJ (upper edge of acromioclavicular joint)
補貼 AC、LEP、MEPSubject
subcali_stand
fullsupination
受試者坐輪椅上
forearm_neutral (手指伸直併攏)
subcali_wheelchair (手放於預備位置、使用 locator)
肩胛骨Scapula
pointer_AC (acromioclavicular joint)
Locator+Pointer 受試者左手扶 Pointerpointer_HCT (scapular coracoid tip)
肩胛骨定位器與指標器
(a) (b)
圖2- 13(a)肩胛骨定位器之形狀;(b)肩胛骨定位器定位肩胛骨骨圖示意圖
(a) (b)
圖2- 14(a)指標器正視圖;(b)指標器側視圖
肩胛骨定位器為一類似圓規狀之金屬器具,有三個可活動之定位腳,適當調 整三根定位腳之相對位置以符合受試者肩胛骨上三個骨突點的位置。指標器上有 三顆共線且不等距的三顆反光球,運用線性的關係,可推算指標器尖端的三維座 標值。在靜態校正時,將同時拍攝貼附在肩胛骨上的肩胛骨定位器與指標器上共 六顆的反光球,用以取得肩胛骨幾何參數。
指標器的功能除了在靜態校正中標定一三維的點座標,還兼具提供曲面的離
第五節 資料分析流程
如圖2-15,本研究使用了資料擷取系統與 Vicon 系統各別收取力規、編碼器 與反光標記點的資料,於實驗結束後,第一步的資料處理會先將兩筆資料來源做 同步,讓後續力動學的分析力規的訊號值可以對應到反光標記點正確的時間點,
由於取樣頻率的不同,會使用資料內插補點的方法,讓同步後的資料具有相同的 樣本數。
力規的訊號透過校正取得的基礎線函數參數,從編碼器 pulse 數換算相對輪 椅旋轉角度後予以扣除(僅Fx, Fy)其重力基礎值,求得推進過程手部的淨施力。
並將訊號轉換至相對輪椅的座標系統。待分析推進效率時轉換至瞬時極座標系統,
或逆向動力學分析時轉換至實驗室global 座標系統。
依據反光標記點的資料將每一次收取的推進過程切分數個推進週期,以利後 續週期正規化分析。黏貼的反光標記點除手掌的四顆不列入,其餘18 顆在每一瞬 間的座標值先經由GOM 處理,取得較精確的座標值,並同時獲得胸骨鎖骨關節、
肩峰鎖骨關節、盂肱關節、肱骨滑車、肱骨小頭的關節中心位置,用以決定肩胛 骨三維方位及前臂局部座標系統定義。
靜態校正會取得掌骨相對前臂初始的角度值,計算關節於動態過程之關節角 度變化,依據ISB 所定義之旋轉順序(表 3-1)一一求出各組關節之尤拉角(Euler angle),在腕關節予以扣除初始角度。
依據 Dempster’s coefficient 肢段近遠端定義,計算出每個肢段瞬時加速度。
由尤拉參數計算其瞬時角加速度,兩者代入逆向動力學方程式求解掌骨、前臂、
上臂三個肢段近端的關節受力與力矩,將掌骨近端 、moment 轉換至相對前臂之 局部座標系統,表腕關節受力與力矩;前臂近端轉換至相對前臂模型之局部座標 系統,表肘關節;上臂近端轉換至相對胸廓之局部座標系統,表肩關節。依此,
完成動力學的分析。
Load cell Encoder Marker data
Capture Stage
Data analysis base on Matlab
environment
Synchronization
Read c3d Read rec
Vicon system c3d file Data logger rec file
Joint force Joint moment
Calibration parameter Calibration
Inverse dynamic analysis Upper limb
model GOM Kinematic
analysis
Scapular motion
Joint angle Cycle identification
by marker Cycle identification
Marker data Load cell Encoder
第參章 運動學分析
本章會詳細說明本項研究中,屬於運動學的分析方法與欲比較探討的運動學 參數。
第一節 輪椅推進週期定義
手輪的推進週期,主要區分兩大階段,推進階段(Push phase)與回復階段
(Recovery phase),受試者從一開始施力在手輪上推動手輪前進,至完全施力結 束為推進階段,當手部為了準備下一次的推進而將手掌收回起始的施力位置的過 程,為回復階段。為了比較同一受試者或不同受試者之間的差異,會將推進週期 做常態化至 100%,依據所有受試者推進週期的平均,定義推進階段佔輪椅推進 週期的前53%,回復階段則為後 47%。將不同的週期長度做壓縮或延展以符合常 態化後的統一週期長度(Rao, Bontrager et al. 1996)
使用反光標記點資料判別推進階段與回復階段。先將推進過程手掌的施力點 與旋轉中心點座標值轉換到輪椅的座標系統,求出施力點與旋轉中心點連線與 x 軸的夾角變化,角度最大值的時間點為推進階段的開始時間,同時也是回復階段 的結束時間(圖3-1)。施力點定義為 CM、MP2、MP5 三點中點投影在手輪或省 力把手施力表面上最接近的點。
圖3- 1 輪椅推進過程手部施力點的角度變化及沿軸向方向的力矩圖。縱向實線為 週期開始的時間,虛線為推進階段結束的時間
第二節 上肢局部座標系統定義
套用上肢多連桿模型於動作分析前有幾項要件。模型中需定義各關節之關節 運動型態,並取得各肢段之幾何參數。幾何參數使用各肢段特徵點(如關節中心、
解剖上或反光標記所黏貼之骨突點)於已定義之局部座標系統上所在之局部座標 值去描述,代表該肢段之剛體關係。透過局部座標系統的定義與確立關節型態,
便可使用座標轉換矩陣描述肢段與肢段間關節的運動,在給定關節變數後換算出 合乎模型的運動結果,並用於後續使用關節座標系統換算關節角度。上肢座標系 統之定義受到廣泛之討論,而座標系統定義之一致性有助於研究人員甚或是臨床 人員間之溝通。本研究遵照ISB 之建議(Wu, van der Helm et al. 2005)定義上肢各 肢段局部座標系統,原則上皆是以在neutral position 下 X 軸向前、Y 軸向上、Z 軸向右的方式去訂定的,分述如下:
0 50 100 150 200 250 300 350 400 450 500
-10 0 10 20 30 40 50 60 70
Mz (N-m) theta (degrees)
軀幹
軀幹之局部座標系統定義係根據胸骨凹口、劍突、第七頸椎棘突以及第八胸 椎棘突共同決定。其原點位在胸骨凹口,Y 軸方向定義為第八胸椎棘突與劍突處 中點指向第七頸椎棘突與胸骨凹口的中點,Z 軸方向為由胸骨凹口、第七頸椎棘 突、與第八胸椎棘突和劍突處中點三點所構成平面的法向量,X 軸依據右手定則 決定。詳細定義如下
7 8
7 8
2 2
2 2
SN C XP T
trunk
SN C XP T
P P P P
Y P P P P
+ − +
= + − +
K K K K
K K K K K
8 7
8 7
( ) ( )
2
( ) ( )
2
XP T
C SN SN
trunk
XP T
C SN SN
P P
P P P
Z P P
P P P
− × + −
= − × + −
K K
G G K
G K K
G G K
trunk trunk trunk
X
G =Y
G ×Z
Gtrunk SN
O
K =P
G肩胛骨
肩胛骨之局部座標系統定義係根據肩峰角、肩胛下角以及肩胛脊根部所共同 決定。其原點位於肩峰角,X 軸為沿著由肩峰角、肩胛下角以及肩胛脊根部三個 骨突所形成平面之法向量。Z 軸根據肩胛脊根部至肩峰角之向量決定,Y 軸由右 手定則決定。詳細定義如下
AA RS
Scapula
AA RS
P P
Z P P
= −
−
K K
G K K
( )
( )
Scapula IA RS
Scapula
Scapula IA RS
Z P P
X Z P P
× −
= × −
G K K
G G K K
Scapula Scapula Scapula
Y
K =Z
K ×X
KScapula AA
O
K =P
K鎖骨
鎖骨之局部座標系統定義,在ISB 的建議中僅使用胸骨鎖骨關節與肩峰鎖骨 關節兩個骨突點定義長軸,由於鎖骨本身相對軀幹的軸向旋轉相當微小,主要的 運動為前突/後縮、上舉/下轉,因此合併軀幹局部座標系統的 Y 軸,做為定義鎖 骨局部座標系統的其中一個平面。原點位於胸骨鎖骨關節中心,由胸骨鎖骨關節 中心指向肩峰鎖骨關節中心定義為正Z 軸方向,由 Z 軸與軀幹 Y 軸所構成之平面 決定X 軸,向前為正,Y 軸依據右手定則決定。詳細定義如下
AC SN
Clavicle
AC SN
P P
Z P P
= −
−
K K
G K K
trunk Clavicle Clavicle
trunk Clavicle
Y Z
X Y Z
= ×
× K G
G K G
Clavicle Clavicle Clavicle
Y
K =Z
K ×X
KClavicle SC
O
K =P
K肱骨
肱骨之局部座標系統係根據內、外髁以及肱骨頭中心所共同決定。肱骨頭中 心係根據文獻(Sholukha, Van Sint Jan et al. 2009)提供之迴歸分析參數計算位置。原 點位於盂肱關節中心。由內外髁中點指向盂肱關節中心定義為Y 軸,以手肘屈曲、
伸展的旋轉軸定義為Z 軸。X 軸依據右手定則決定。詳細定義如下
2
2
LEP MEP
GH Humerus
LEP MEP
GH
P P
P
Y P P
P
− +
= − +
G G
G
G G G
G
( )
2
( )
2
LEP MEP
Humerus US
Humerus
LEP MEP
Humerus US
P P
Y P
Z P P
Y P
× + −
= × + −
G G
G G
G G G
G G
Humerus Humerus Humerus
X
G =Z
G ×Y
GHumerus GH
O
K =P
G前臂(Model & Elbow)
前臂的座標系統有兩組,一組用於定義上肢前臂模型的局部座標系統以及由 肱骨至前臂的手肘關節座標系統(Joint coordinate system)。原點位於肱骨內、外 髁的中點,定義Y 軸為尺骨長軸方向,Z 軸為手肘關節的旋轉軸,與肱骨的 Z 軸 定義相同,X 軸依據右手定則決定。詳義定義如下
2
2
LEP MEP
US forearm
LEP MEP
US
P P
P
Y P P
P
+ −
= + −
G G
G
G G G
G
forearm Humerus
Z G = Z G
forearm forearm forearm
X G = Y G × Z G
2LEP MEP
forearm
P P
O
= +G G G
前臂(Wrist)
前臂第二組座標系統的定義,是為了描述由前臂至手掌的腕關節座標系統,
遵照ISB 建議的方式訂定,原點在尺骨莖突上,Y 軸為尺骨長軸的方向,X 軸方 向為尺骨莖突、橈骨莖突與肱骨內、外髁中點三點構成的平面的法向量,Z 軸方
向依據右手定則決定。詳細定義方式如下
2
2
LEP MEP
US forearm
LEP MEP
US
P P
P
Y P P
P
+ −
= + −
G G
G
G G G G
( ) ( )
2 2
( ) ( )
2 2
LEP MEP LEP MEP
RS US
forearm
LEP MEP LEP MEP
RS US
P P P P
P P
X P P P P
P P
+ +
− × −
= − + × − +
G G G G
G G
G G G G G G G
forearm forearm forearm
Z G = X G × Y G
forearm US
O G = P G
掌骨
為了與Dempster 所提出人體量測學中肢段參數的定義方式一致,掌骨之局部 座標系統,Y 軸為肢段的長軸,由中指指間關節與腕掌關節的連線來決定。手掌 平面法向量定義為同時垂直長軸及第二、五掌指關節連線的向量,為X 軸方向。
Z 軸方向依據右手定則決定,原點定為中指指間關節、腕掌關節與第二、五掌指 關節的幾何中心。詳細定義如下
3 3
CM PI
hand
CM PI
P P
Y P P
= −
−
G G
G G G
5 2
5 2
( )
( )
MP MP hand
hand
MP MP hand
P P Y
X P P Y
− ×
= − ×
G G G
G G G G
hand hand hand
Z
G =X
G ×Y
G2 5 3
4
CM MP MP PI
hand