國 立 交 通 大 學
工學院精密與自動化工程學程
碩士論文
數位式微型反射鏡投影機之
穿透式平順圖像裝置模態最佳化分析
Optimization Analysis for Transmissive Smooth
Picture Device of Digital Micro Mirror Projector
研 究 生 : 徐 文 浩
指導教授 : 洪 景 華
數位式微型反射鏡投影機之
穿透式平順圖像裝置模態最佳化分析
Optimization Analysis for Transmissive Smooth
Picture Device of Digital Micro Mirror Projector
研 究 生: 徐 文 浩 Student : Wen-Hao Hsu
指導教授: 洪 景 華 Advisor : Chinghua Hung
國 立 交 通 大 學
工學院精密與自動化工程學程
碩士論文
A Thesis
Submitted to Degree Program of Automation and Precision
Engineering
College of Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Automation and Precision Engineering
JULY 2007
Hsinchu, Taiwan, Republic of China
數位式微型反射鏡投影機之穿透式平順圖像裝置模態
最佳化分析
學生:徐文浩 指導教授:洪景華
國立交通大學工學院精密與自動化專班﹙研究所﹚碩士班
摘
要
本 研 究 的 主 旨 在 探 討 數 位 式 微 型 反 射 鏡 投 影 機 DLP(Digital Light Processing)之穿透式平順圖像裝置 (Transmissive Smooth Picture, TSP)的模 態最佳化,藉由模態分析與最佳化分析,以了解此裝置作動之行為與擺動過程中, 因為擺動裝置尺寸、質量上的不同與支撐彈簧結構的改變,對於外界干擾激發共 振抵抗的能力與對投影畫面品質的影響。本研究利用有限元素法套裝軟體 ANSYS, 進行模擬穿透式平順圖像裝置的自然頻率、振動模態等現象,配合實驗數據驗證, 以找出模態與投影品質好壞之間的關連性。再跟據此經驗訂定適當的設計參數, 求取最佳的支撐彈片彈片設計與結構設計的搭配組合,並在現階段電子控制與磁 力大小限制下,獲得最高共振頻率的裝置設計,此結構最佳化設計,經實驗驗証, 可以有效提昇系統共振頻率。
Department of Automation and Precision Engineering
College of Engineering, National Chiao Tung University
ABSTRACT
This thesis focuses on the modal optimization analysis for transmissive
smooth picture(TSP) device of digital micro mirror projector. The
objective of the optimization is to reduce and eliminate the resonance
caused by the TV system vibration. The finite element analysis of modal
and optimization were conducted utility ANSYS 8.0 software. Two kind of
experiential modal analyses were conducted for verification. Optimized
design was obtained by enhancing the support structure stiffener and
reducing the un-necessary material. With this analysis, natural frequency
fo the TSP device was raised three times higher than that of the original
one, which was also verified by experiment.
誌
謝
首先要感謝我的指導教授洪景華博士對於學生的指導,洪老師在課業上解惑 與敬業的態度讓我受益匪淺,在這段期間的訓練下,漸漸能夠跟隨老師的理念與 做學問的態度,往後希望能本這種精神在事業上有另一番精進。另外,也要感謝 口試委員陳仁浩博士、陳宗麟博士,對學生研究內容的建議,讓學生有更多不同 的思考角度修正,使本篇論文更加完整。 在職進修這段其間最辛苦的是我的內人佳瑋,在我最忙碌的時候,經常獨自 陪伴我們兩個可愛的小朋友宸彥與丞宥,還能將家裡的起居生活照料的很好,讓 我沒有後顧之憂,老婆謝謝你,畢業後讓我來幫你分擔一些吧!同時,我要感謝 我的父母與岳父,有他們的支持與期望,讓我在士氣低落的時候,又能重拾堅持 到底的熱情。 接著感謝崴昊科技的陳申岳博士與蔡文祥經理對於 ANSYS 軟體模型的指導, 與實驗室的學長與學弟的幫忙,讓我的論文更加順利。另外,我也要感謝公司的 長官與同事,在我學校有事忙不過來時的協助與諒解,讓我可以順利完成學業。 還有一些在這段期間幫助我完成論文的人,謝謝你們。 最後,我要將我畢業的這份榮譽獻給我的父母,有他們對我從小的栽培與支 持,我才能在今天與大家分享我的喜悅。我要將我畢業的這份榮譽獻給我的老婆 與小孩,看到你們的笑容,是我每天最快樂的事。
目 錄
中文摘要 ………
i英文摘要 ………
ii謝誌 ………
iii目錄 ………
iv圖目錄 ………
vi表目錄 ………
xi第一章、緒論 ………
11.1 前言 ………...
11.2 發展歷史回顧 ………...
21.3 研究動機 ………...
81.4 研究方法 ………...
9第二章、理論基礎 ……….………
112.1 振動力學特性及模態分析理論 ………...…
112.2 最佳化設計 ……….……….
152.3 有限元素法分析法 ………..…….
21第三章、模態分析 ……….…
283.1 穿透式平順圖像裝置有限元素分析模型之建立 …..….
283.2 Shell element 模擬原型模型分析結果 ………...
323.3 Solid element 模擬原型模型分析結果 ………...
353.4 原型實驗分析 ………...
413.5 原型模擬與實驗結論 ………...
51第四章、最佳化分析 ………..………
534.1 建立最佳化模型 ………..…….
534.2 最佳化模擬結果 ………..…….
554.3 最佳化後之實體實驗結果 ………...
664.4 模擬與實驗結果比對 ………...
71第五章、結論與未來展望 ………..…
725.1 結論 ………..……. …………
725.2 未來展望 ………..……. ……
76參考文獻
77圖目錄
圖 1-1 DMD 晶片方型排列微鏡片作動方式 3 圖 1-2 DMD 晶片上微鏡片菱形排列的狀況 3 圖 1-3 反射式平順圖像裝置在反折式鏡頭使用示意圖 4 圖 1-4 穿透式平順圖像裝置在直筒式鏡頭作業示意圖 5 圖 1-5 在經過 SP 的作用後,其在畫面上所呈現的狀況 6 圖 1-6 穿透式平順圖像裝置前視圖 7 圖 1-7 穿透式平順圖像裝置後視圖 7 圖 1-8 本研究方法流程簡圖 10 圖 2-1 模態分析的方法示意圖 13 圖 2-2 彈性板的前四個模態狀況 14 圖 2-3 尺寸最佳化設計 15 圖 2-4 形狀最佳化設計 15 圖 2-5 拓樸最佳化設計 15 圖 2-6 ANSYS 有限元素法分析的流程 22 圖 2-7 Shell63 Element 示意圖 23 圖 2-8 Solid45 Element 示意圖 23 圖 2-9 降階法模態求解的方法 24 圖 3-1 穿透式平順圖像裝置有限元素分析模型建立之流程 28圖 3-2 Shell element 穿透式平順圖像裝置 ANSYS 幾何模型示意圖 30
圖 3-3 Shell element 穿透式平順圖像裝置 ANSYS 網格化與邊界條件示意 30
圖 3-4 Shell element 穿透式平順圖像裝置 ANSYS 網格化與邊界條件側視
示意
30
圖 3-6 Solid 穿透式平順圖像裝置 ANSYS 網格化示意圖 31 圖 3-7 Solid 穿透式平順圖像裝置 ANSYS 網格化與邊界條件側視示意 31 圖 3-8 Shell element 原型第 1 模態 31 圖 3-9 Shell element 原型第 2 模態 32 圖 3-10 Shell element 原型第 3 模態 32 圖 3-11 Shell element 原型第 4 模態 32 圖 3-12 Shell element 原型第 5 模態 32 圖 3-13 Shell element 原型第 6 模態 32 圖 3-14 Shell element 原型第 7 模態 33 圖 3-15 Shell element 原型第 8 模態 33 圖 3-16 Shell element 原型第 9 模態 33 圖 3-17 Shell element 原型第 10 模態 33 圖 3-18 Shell element 模態分析分佈圖 34 圖 3-19 Solid element 原型第 1 模態(1) 35 圖 3-20 Solid element 原型第 1 模態(2) 35 圖 3-21 Solid element 原型第 2 模態(1) 35 圖 3-22 Solid element 原型第 2 模態(2) 35 圖 3-23 Solid element 原型第 3 模態(1) 36 圖 3-24 Solid element 原型第 3 模態(2) 36 圖 3-25 Solid element 原型第 4 模態(1) 36 圖 3-26 Solid element 原型第 4 模態(2) 36 圖 3-27 Solid element 原型第 5 模態(1) 36 圖 3-28 Solid element 原型第 5 模態(2) 36 圖 3-29 Solid element 原型第 6 模態(1) 37 圖 3-30 Solid element 原型第 6 模態(2) 37
圖 3-31 Solid element 原型第 7 模態(1) 37 圖 3-32 Solid element 原型第 7 模態(2) 37 圖 3-33 Solid element 原型第 8 模態(1) 37 圖 3-34 Solid element 原型第 8 模態(2) 37 圖 3-35 Solid element 原型第 9 模態(1) 38 圖 3-36 Solid element 原型第 9 模態(2) 38 圖 3-37 Solid element 原型第 10 模態(1) 38 圖 3-38 Solid element 原型第 10 模態(2) 38 圖 3-39 Solid element 模態分析分佈圖 39
圖 3-40 Shell element & Solid element 模態分析分佈比較圖 40
圖 3-41 擊槌試驗示意圖 41 圖 3-42 擊槌(PCB 086C02) 42 圖 3-43 加速規(PCB 352 C65) 42 圖 3-44 振動頻譜分析儀(ONO SOKKI DS-2100) 42 圖 3-45 衝擊時域圖 42 圖 3-46 原型穿透式圖像平順圖像裝置振動頻譜 43 圖 3-47 原型圖像平順圖像裝置三軸振動頻譜比較圖(量測點在鏡片) 44 圖 3-48 原型圖像平順圖像裝置三軸振動頻譜比較圖(量測點在基座) 44 圖 3-49 量測點不同 Z 軸方向的加速度比較 45 圖 3-50 雷射振動儀 47 圖 3-51 頻率與波型產生器 47 圖 3-52 穿透式平順圖像裝置振動頻率在 100Hz 的狀況 48 圖 3-53 穿透式平順圖像裝置回饋訊號波形 49 圖 3-54 穿透式平順圖像裝置回饋訊號波形 50 圖 4-1 設計變數定義圖示 54
圖 4-2 Shell element 最佳化模型 55 圖 4-3 Shell element 最佳化第 1 模態(1) 56 圖 4-4 Shell element 最佳化第 1 模態(2) 56 圖 4-5 Shell element 最佳化第 2 模態(1) 56 圖 4-6 Shell element 最佳化第 2 模態(2) 56 圖 4-7 Shell element 最佳化第 3 模態(1) 56 圖 4-8 Shell element 最佳化第 3 模態(2) 56 圖 4-9 最佳化前後共振頻率圖 57 圖 4-10 Solid element 最佳化第 1 模態(1) 59 圖 4-11 Solid element 最佳化第 1 模態(2) 59 圖 4-12 Solid element 最佳化第 2 模態(1) 59 圖 4-13 Solid element 最佳化第 2 模態(2) 59 圖 4-14 Solid element 最佳化第 3 模態(1) 60 圖 4-15 Solid element 最佳化第 3 模態(2) 60 圖 4-16 Solid element 最佳化第 4 模態(1) 60 圖 4-17 Solid element 最佳化第 4 模態(2) 60 圖 4-18 Solid element 最佳化第 5 模態(1) 60 圖 4-19 Solid element 最佳化第 5 模態(2) 60 圖 4-20 Solid element 最佳化第 6 模態(1) 61 圖 4-21 Solid element 最佳化第 6 模態(2) 61 圖 4-22 Solid element 最佳化第 7 模態(1) 61 圖 4-23 Solid element 最佳化第 7 模態(2) 61 圖 4-24 Solid element 最佳化第 8 模態(1) 61 圖 4-25 Solid element 最佳化第 8 模態(2) 61 圖 4-26 Solid element 最佳化第 9 模態(1) 62
圖 4-27 Solid element 最佳化第 9 模態(2) 62 圖 4-28 Solid element 最佳化第 10 模態(1) 62 圖 4-29 Solid element 最佳化第 10 模態(2) 62 圖 4-30 最佳化前後共振頻率圖 63 圖 4-31 最佳化後作動位移量 64 圖 4-32 原型與最佳化模擬振動頻率 65 圖 4-33 穿透式圖像平順圖像裝置振動頻譜 66 圖 4-34 最佳化圖像平順圖像裝置三軸振動頻譜比較圖(量測點在鏡片) 67 圖 4-35 圖像平順圖像裝置三軸振動頻譜(單純只有基座沒有彈片與載座) 67 圖 4-36 最佳化量測頻率變化(量測點在基座) 68 圖 4-37 穿透式平順圖像裝置於 60Hz 回饋訊號波形 69 圖 4-38 最佳化穿透式平順圖像裝置振動頻譜 69 圖 4-39 最佳化穿透式平順圖像裝置頻域振動頻譜 70
表目錄
表 3-1 穿透式平順圖像裝置材料性質參數表 29 表 3-2 共振模態與裝置運動效能的關係 36 表 3-3 量測點不同其共振頻率的關係 42 表 3-4 量測點不同其共振頻率的關係 49 表 4-1 設計變數定義表 50 表 4-2 最佳化前後共振頻率表 53表 4-3 Shell element 最佳化參數解與微調後的代入 Solid element 模型
最佳化選擇參數
53
表 4-4 Solid element 共振模態與裝置運動效能的關係 59
表 4-5 最佳化前後實驗一衝擊槌試驗值的差異 63
第一章
緒論
1.1
前言
在目前主流的 DLP(Digital Light Processing)與 LCD(Liquid Crystal Display) 投影機市場中重要的競爭點就是解析度(或者說光學性能)與重量問題,如何將解析 度提高,DLP 的發展關鍵在於德州儀器 (Texas Instruments, TI)的數位式微型反 射鏡元件(Digital Micro-mirror Device, DMD)之產能狀況與降低此重要元件價格 的能力。DLP 產品為了在輕型產品市場上佔有一席之地,並提高產能解決目前產量 不足的窘境,TI 於 99 年初投資建構新的整合晶片結構產線,進行新一代產品良率 的提升計畫。同時,為了提高圖像解析度的顯示要求,TI 發展平順圖像(Smooth Picture)技術與新的演算法來提昇影像的解析度品質,以目前市場上實際應用結果 來看,平順圖像技術的畫質改善確實可以達到市場要求的水準,且大大降低了生產 成本及提昇了 DMD 晶片之良率。對於 DLP 陣營來說這是一項新的發展利器,但是對 於應用端來說,對於支援平順圖像技術的裝置設計與應用驗證,則是另外衍生的新 挑戰,本研究的目的即針對穿透式平順圖像裝置的模態行為進行探討,以避免穿透 式平順圖像裝置 TSP( Transmissive Smooth Picture Device)在應用上因共振現象 而產生解析度不良。[1]
投影機在追求影音產品的畫質細緻與顏色真實化的需求下,數位投影技術與數 位控制技術快速發展,各式光學元件與照明元件性能大幅提昇,隨著家庭娛樂消費 能力不斷的增加,使得不管是前投影或是背投影機市場都呈現需求旺盛的景象。根 據 Fuji Chimera Research 的調查統計顯示,投影機的市場量已由 1998 年的 44 萬 台,擴展到 2006 年全球的市場規模逾 510 萬台,iSuppli 甚至預估 2010 年有 1 億 台的銷售量其成長曲線相當驚人[2],自然也就成為各廠家爭奪商機大餅的市場。 其中攜帶型、高亮度、高解析度產品的市場需求比重,明顯大幅增加。這也說明最 近廠商所推出的眾多新機種中,重量少於 4 磅的單片 DLP 投影機特別受到重視,輕 薄小型化的優勢,已經成為市場的主流。甚至小於 2 磅的產品也已經出現,應用的 範圍大大擴展。
面臨不同投影光學架構與光學設計的影像系統價格上的挑戰、快速加大尺寸的產能 的液晶面板與電漿電視,對於家庭娛樂市場競爭的降價壓力,各家廠商無不激烈拓 展市場,也因而帶動投影機價格快速下滑。面對一些因為特殊因素需額外再產生的 裝置費用,如本文所探討的平順圖像裝置,在兼顧效能與可靠度下,如何能夠再降 低成本並提高品質競爭力,就成為目前技術開發的課題。[3]
1.2
發展歷史回顧
為了配合 TI 平順圖像技術的發展與數位式微型反射鏡元件的更新,目前市場 上大多數的 DLP 生產廠商大都依照 TI 建議的架構,自行進行平順圖像系統的設計 與生產製造。依據不同的概念可細分為反射式與穿透式兩種不同的設計,本研究主 要針對穿透式平順圖像裝置與系統的共振現象並探討如何提高抵抗共振的能力。 投影系統中為了提高解析度並降低成本,導入穿透式平順圖像裝置,但伴隨而 來的問題是容易因系統喇叭震動產生結構振動,振動的問題將導致工件精密度的降 低及壽命的減低,並造成畫面線條抖動無法觀賞。傳統以來減少振動的問題,是將 移動零件輕量化,且維持結構一定剛性,並避開結構本身的自然頻率,來避免而外 產生共振的現象。因為一旦產生共振,結構可能產生提早破壞,或者因為結構位移 形變而使效能降低,因此在提高結構的自然頻率設計的過程中,減少本身的重量或 提高剛性,取得最佳的平衡點,將是設計過程中的重點,本文將利用 ANSYS 模擬求 解最佳尺寸下的模態分析,並將結果與實際樣品裝置性能作比對。1.2.1 平順圖像裝置的應用
傳統的單晶片 DLP 系統最主要是用於商用資料投影機、大多數的家庭娛樂投影 機以及大螢幕背投電視與電視牆。DLP 投影技術是應用了數位式微型反射鏡元件來 做主要關鍵元件,以實現數位化光學處理過程。它先利用一組聚光燈鏡將燈泡發出 的光線聚焦在穿透性色輪(Color Wheel),再利用第二組鏡片將通過色輪的光線均 勻聚焦在微顯鏡晶片元件表面。隨著反射鏡旋轉狀態的不同(+12 度或-12 度),光 線可能會反射進入投影鏡頭的透光孔(ON)或是離開投影鏡頭的透光孔(OFF),使得再經過鏡頭投影成像,反射鏡會把入射光反射進入或是離開投影鏡頭的透光孔,利 用二位元脈衝寬度調變可以得到灰階效果,配合旋轉式彩色濾鏡,即可得到彩色顯 示效果。 投影機上的增加的平順圖像裝置 [04] [05]是允許影像暫存配合人眼視覺暫留 的一種技術,目的在減少數位式微型反射鏡元件(DMD)上微鏡片(Micro-Mirror)數 量卻可以將畫面的解析度提高,可以說是一種很聰明的作法。在了解平順圖像裝置 之前,我們必需先了解數位式微型反射鏡元件,以微機電 (MEMS) 元件為基礎的微 鏡片(Micro-Mirror)結構。 於 HD3 之前 DMD 晶片設計,其微鏡片排列是以方形方式緊密結合,而每一微鏡 片所投影到畫面上的圖像訊號,我們視為單一畫素或稱解析度,如此便可利用陣列 的方式構成我們觀賞時所看到的畫面,不同為鏡片的數量排列就代表著解析度的高 低。但自 HD3 產品階段之後, TI 將為鏡面旋轉了 45 度,成為菱形排列,此後光學 設計與配合的裝置設計也就必須突破傳統加以改變,這也造就了平順圖像裝置的產 生。 [圖 1-1.] [圖 1-2.]說明了 DMD 晶片上微鏡片方型排列與菱形排列的狀況,其 微鏡片的排列數量分別為 720x640(依照解析度需求可有不同數量的排列)。兩者產 生的畫面解析度完全不同。 在 xHD4 世代的微型反射鏡晶片上面有 720x640 之數量的微鏡片,而每一晶片 圖 1-1. DMD 晶片上方型排列微鏡 片作動方式 圖 1-2 DMD 晶片上微鏡片菱形排列 的狀況
所在影像上所代表是一個畫素(Pixel),需要注意的是在水平及垂直部份,微鏡片 它們並沒有重疊。當啟動了反射式平順圖像裝置,平順圖像裝置將利用振動的方 式,週期必需在 1/60 秒內讓畫素上下平移 1/2 畫素,也因此,所有在微鏡片中間 的空隙也因此被填滿,最終產生出 1280x720 解析度的影像品質。確切的說,反射 式平順圖像裝置並沒有提升畫面的物理分辨率,而只是讓一幅圖像分兩次顯示,然 後通過在光路上設置抖動鏡面將兩幅畫面交錯並分時重疊在起成像在我們眼前,好 比 CRT(Cathode Ray Tube)成像其實是一個點高速移動掃描出來的結果。
1.2.2 平順圖像裝置的分類
平順圖像裝置的功能主要是移動讓經過透鏡的光線產生 1/2 畫素距離偏移 量,來連續不斷的顯示 DMD 晶片上所產生的圖像訊號。目前我們常見的平順圖像裝 置依照光學設計上的架構不同,主要分為兩種:反射式(Reflective)及穿透式 (Transmissive)兩種,以下將粗略介紹此兩種之不同之處。 反射式的平順圖像裝置的技術中是需要將反射鏡(Mirror)在光路(Optical Path)中移動一個微小的角度來達成光路偏移 1/2 畫素的目的,且通常反射式都是 與反折式(Folded Projection)鏡頭搭配使用,經常使用於背投影光機中,可以有 效減小電視所需要的體積需求。[圖 1-3.]為反射式平順圖像裝置在反折式鏡頭使用 的示意圖。 圖 1-3.、反射式平順圖像裝置在反折式鏡頭使用示意圖本文所要研究的目標是穿透式(Transmissive)技術,所使用的穿透式平順圖像 裝置需要使用一片乾淨的薄型平面玻璃,使平面玻璃對某一個特定軸向的作週期性 旋轉運動,一樣可以讓光路達到移動 1/2 畫素的目的,進而增加畫面圖像的解析度。 實際應用上,穿透式平順圖像裝置大都配合傳統設計的直筒型鏡頭應用。[圖 1-4.] 為穿透式平順圖像裝置在直筒式鏡頭作業的示意圖。 圖 1-4.、穿透式平順圖像裝置在直筒式鏡頭作業示意圖
1.2.3 平順圖像裝置的控制原理
當我們讓 DMD 晶片上的訊號在經過穿射式平順圖像系統後,因為光線上下平移 1/2 畫素的距離,所以可以獲得不同兩個極限位置的畫面狀況。利用演算法配合穿 射式平順圖像系統動作,可將此兩訊號的影像於 1/60 秒內的時間內,輸出為經過 我們視覺整合過所看的到的重疊畫面。而因為人眼視覺暫留的特性與眼睛長距離下 鑑別率的因素,最終所產生出來二倍的畫面品質的結果,可讓我們感覺畫面解析度 增加。圖 1-5.、在經過 SP 的作用後,其在畫面上所呈現的狀況 [圖 1-5.]說明了經過平順圖像裝置處理後,所展示出來的畫面品質與原先在水 平及垂直方向的訊號相同,只是顯示出來的時間。在 DMD 晶片上只使用原先一半的 微鏡片(縱向的微鏡片減半),並將彼此微鏡片間的間隙改為菱形,如此所產生的影 像結果,最終所產生影像的解析度品質,將倍增於微鏡片的數量,並且也沒有在兩 個像素之間出現菱形間隙的陰影。 一般情狀下其控制的方法是當輸入訊號是在色輪(Color Wheel)旋轉到藍色濾 光片時,進行訊號轉換,當訊號進來的同時,被分成兩個 SP 的分支驅動訊號,此 兩分支驅動訊號將提供產生兩畫面的分支影像訊號,如果這電視畫面所呈現為 60Hz,那此兩分支影響到訊號將是 120Hz。為了達到連續不斷的畫面輪流呈現,通 常是應用音圈馬達(Voice Coil Motor)或壓電馬達來帶動鏡片及其它相關元件的位 移,來產生此分支畫面,在整個連續不斷的轉換與色輪間的配合,於螢幕上產生持 續且快速的平移結果,最終將被人的視覺予以整合為單一影像。如此我們可以說穿 射式平順圖像系統將會在螢幕上創造出 1280x720 畫素的解析度影像品質,但是實 際上於 DMD 晶片上的微鏡片的數量是 640x720 個,數量減少了一半。
1.2.4 穿透式平順圖像裝置的結構介紹
本研究的穿透式平順圖像裝置大致上的結構接下來圖 2-6, 圖 2-7 and 圖 2-8 所示,主要結構項目如下: 1. 一支撐彈簧 2. 結構基座 3. 鏡片載座 4. 透明鏡片5. 音圈馬達(Voice Coil Moter, VCM) 6. 控制線材 結構基座 支撐彈片 永久磁鐵 音圈 鏡片載座 鏡片 圖 1-6. 穿透式平順圖像裝置前視圖
1.3
研究動機
結構最佳化設計領域的研究中,尺寸最佳化設計的技術相當成熟,這種方法對 於一些已經有設計雛型的結構,很容易可以依據新的需求,進行設計上的改善與效 能提昇。另外借由最佳化分析的過程,可以讓設計者對於設計物結構的各項特性更 加了解,知道那些地方是需要加強,那些地方是可以降低設計標準,以最精簡的概 念去設計,這樣無形中可以減少許多無謂的浪費。 目前市場各廠所製作穿透式平順圖像裝置,於製作及功能上各有優劣,而依照 TI 所建議採用彈片型設計,因其共振頻率(Resonance Frequency)偏低而產生的畫 面振動效應,一直是困擾著投影機製造商與系統商的問題,共振現象導致產品可靠 度問題身受考驗,對於產品表現影響很深,彈片式平順圖像裝置如何提高彈片式設 計之共振頻率就成了值得研究的課題。 雖然穿透式平順圖像裝置,TI 已經有一些概念想法,但是市場上並沒有真正的 商品化設計,對於結構設計者而言,參考其設計的概念,在已知各項負載與邊界限 制下,把想要設計的幾何輪廓決定出來,雖然可以得到一個堪用的平順圖像裝置, 但是其品質與效率並非最佳的設計,有賴各家廠商自行去做優化或者改善的動作。 再者因為穿透式平順圖像裝置所需要的轉動量,幾乎是十倍於反射式的平順圖像裝 置,難以參考市面上可看到的反射式的平順圖像裝置設計,例如學習其設計優點, 以結構化支撐臂為旋轉軸的概念就難以應用在本設計中。本研究初步依照其彈片型 反射式的平順圖像裝置設計概念,先勾勒出一個可能的基本設計,希望能夠透過參 數化的最佳化設計概念並配合有限元素分析(Finite Element Analysis),利用電 腦性能快速的運算能力,改善現有的架構設計以提升結構的自然頻率,或者減少結 構被激發共振的機會。最終的目的是在現行的設計架構下,以不作大設計變更為原則,去做模態最佳 化設計,了解目前設計的極限與未來設計時所要注意的地方,讓下一代產品有一個 設計判斷依據。
1.4
研究方法
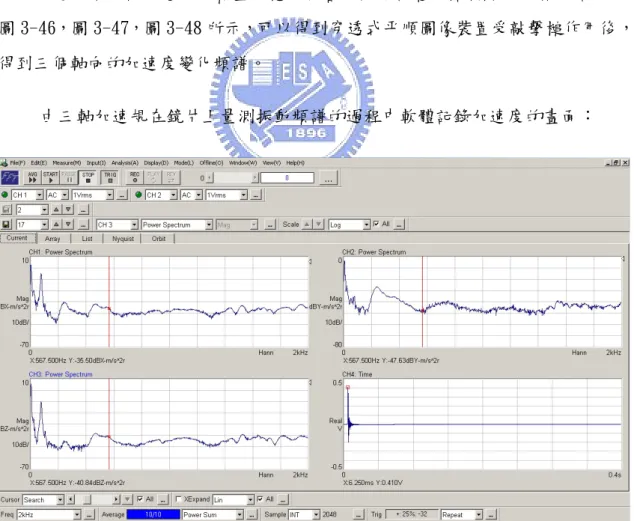
本研究將以彈片型穿透式平順圖像裝置樣品模型為研究對象,並針對其支撐彈 簧的形狀尺寸、厚度選擇為設計變數來進行模態最佳化之分析。 在研究步驟上,第一部份重點在收集相關資料並了解目前 DLP 投影光機對穿透 式平順圖像裝置的原理及運動形式,根據振動學的基本理論,縮小要探討的目標範 圍,並試圖將研究的重點擺在提高結構的扭轉剛度、提高自然共振頻率的目標上。 接下來,第二部份則是利用 ANSYS 模擬求解目前原型結構的模態分析,了解發生共 振的模態現象,並探討分析得到的模態與投影品質的關連性。第三部份為確認有限 元素分析結果之可靠性;將此原型裝置利用外來特定頻率外來訊號,配合雷射量測 儀(Laser Vibrometer)量測光反射的回饋訊號以獲得結構之振動響應,與共振頻率 分佈;另一方面,以衝擊槌為外力源,由頻譜分析儀分析加速規所傳回的振動訊號, 量測結構的自然頻率,由此兩項實驗的數據,配合有限元素求解的結果,以確保實 驗與模擬的一致性,充份了解分析模型與實驗的相關性。第四部份為了加快運算速 度節省運算時間,在 ANSYS 中先以 Shell element 建立最佳化設計模型,由設計變 數、狀態變數與目標函數的選擇,進行尺寸最佳化。然後依照最佳化的尺寸結果, 另外以 Solid element 模型來進行模態驗證與變形量確認。第五部份,最終裝置構 型以最佳化的尺寸打樣,實驗量測數據,進行模擬與試驗結果探討,暸解最佳化結 果的可行性與電腦輔助分析應用的準確性。 本研究將嘗試利用最佳化設計概念,配合 ANSYS 電腦輔助分析,建立穿透式平 順圖像裝置最佳化設計與自然頻率之間的關係,希望可利用模擬後之結果,在不作 太大設計變更下,優化現有設計,加快排除穿透式平順圖像裝置設計上的缺點,增 強新一代裝置設計成功率與效能。圖 1-7. 本研究方法流程簡圖 原型電腦 模態模擬 原型實驗 驗證 模態最佳化 設計 實驗驗證最 佳化構型 結果匹配 問題的定 義與了解 振動原理研究 最佳化方法研究 電腦輔助有限 元素法研究 模擬與實驗 結果討論 推論控制參數 推論控制參數 驗證模型可信度
第二章
理論基礎
2.1 振動力學特性及模態分析理論
2.1.1
振動力學理論基礎[6],[7]
單自由度(Single Degree of Freedom)一維簡諧振盪的動態系統之運動方程式 (The Equation of Motion)[06]可表示為:
F
kx
x
c
x
m
&
&
+ &
+
=
(2-1)其中 m 為質量、c 為阻尼係數(Damping ratio)、k為剛性(Stiffness)或稱為彈 簧常數(Spring Constant)、F為負載、x為位移。一般而言自然頻率(Natural Frequency)是在探討結構在自由振動時(Free Vibration),非受外力作用時之振動 頻率,且在一般狀況下阻尼所產生的影響極小或者沒有加阻尼,通常可以將阻尼項忽略, 如此一來運動方程式就可以簡化為:
0
=
+ kx
x
m
&
&
此時假設x
(
t
)
=
Ae
λt (2-2) (2-3) 將(2-3)代入(2-2)可得特性方程式(characteristic equation)m
λ
2+ k
=
0
(2-4) 則 可 根 據 (2-4) 式 求 出 特 徵 值 λ 、 角 頻 率 ϖn (Angular Frequency)與 振動頻率 f分別如下列所示: ni
m
k
ϖ
λ
=
±
−
=
±
(2-5) 其中,1
−
=
i
(2-6)m
k
n=
ϖ
(rad/sec) (2-7)m
k
f
nπ
π
ϖ
2
1
2
=
=
(1/sec or Hz) (2-8)運動方程式解為
x
(
t
)
=
A
1e
λ1t+
A
2e
λ2t (2-9) 所以由以上的公式對於一個未受外力無阻尼的自由振動的結構來說,可以歸結 出幾個方向,其振動頻率的大小與運動結構本身的剛性與質量有關,其關係如(2-8) 所示,振動頻率與 k 成正比,而與 m 1 成反比,所以如果想要提高自然頻率可以 增加結構的勁度,或者降低結構物質量大小,但是一般來說,這調整這兩者在實際 應用上是相互影響的,很難兩者同時兼顧,經常造成相違背的結果。 同理,如將此一簡諧振盪的動態系統表示為轉動為主的單自由度運動系統,則 (2-1)式可表示為:M
K
C
I
pθ
&
&
+
pθ
&
+
pθ
=
(2-10) 其中I
p 為轉動慣量、C
p 為扭轉阻尼係數(Damping ratio)、K
p 為扭轉剛 度(Stiffness)或稱為彈簧常數(Spring Constant)、M 為力矩、θ
為轉動角 度。在不考慮轉矩與扭轉阻尼的狀況下,求解可得 p p nI
K
=
ϖ
(2-11) p p n pI
K
f
π
π
ϖ
2
1
2
=
=
(2-12) 其中ϖn (Angular Frequency)代表角頻率而 f 代表振動頻率。 由(2-12)所示,振動頻率與 K 成正比,而與p p I 1 成反比,所以如果想要提 高自然頻率可以降低結構轉動慣量,由轉動慣量的定義來看即是減少質量或者改變 質量位置配置;另外增加結構的扭轉剛度也可以達到同樣提高自然頻率的目的,這 一點是本研究要嘗試進行的方向。2.1.2
模態分析方法[8]
模態是機械結構的與生俱有的振動特性,每一個模態會有相對應的頻率、阻尼 比和模態行為。模態分析是研究結構動力特性一種近代工程方法,是在工程振動領 域中系統化的辨別方法,其模態參數可以由計算模擬或試驗分析取得,這樣一個計 算模擬或試驗分析過程稱為模態分析。模態由有限元素計算分析的方法取得,稱為 計算模擬分析;如果是通過試驗將取得的輸入與輸出信號經過參數識別獲得模態參 數,稱為試驗模態分析,此種分析為實作上普遍使用的方法,方便、直覺且正確性 佳。通過試驗模態分析方法搞清楚了結構物固有的特性,例如知道在那些易受影響 的頻率範圍內,結構各階主要模態的特性,就可能預知結構在此頻段內,外部或內 部受各種振動作用下實際振動響應,接續就可以針對這些結果去做分析與實行解決 方案。因此,模態分析是結構動態設計及設備的故障診斷的重要方法。 由於工程應用上結構物實際振動千姿百態、瞬息變化,很難輕易地由簡單的 理論推導,就可掌握真正的特性,而試驗模態分析恰好提供了研究各種實際結構振 動的一種有效的方法。首先,將結構物在靜止狀態下利用人為激振方式,透過測量 激振力與待分析物振動響應並進行快速傅立葉變換(FFT)分析,根據模態疊加原 理,在已知各種載荷時間歷程的情況下,就可以預知結構物的實際振動的響應歷程 或響應頻譜,如此,利用這些資料結果就可以驗證設計的合理性、增快修正結構物 設計,以加快達成預期的最佳性能。 圖 2-1. 模態分析的方法 模態分析 數值模擬模態分析 實驗模態分析 分析結構動態自然特性 用實驗的方法確認結構自然特性 利用電腦模擬預知結構自然特性同樣地,電腦數值計算模擬分析發展進步也相當迅速,正確地利用有限元素計 算分析的方法取得的模態,也能提供設計者相當不錯的預知結果。電腦計算模擬分 析的優點是在設計的初期,可以快速利用虛擬模型得到分析物的模態特性,不必等 到真正的模型完成後,就可提供設計者一定程度而準確的預知結果,可以早期修正 可能發生的動態影響,這點在目前工業界強調速度與可靠性的要求下,具有相當高 的優勢。 所以結合電腦技術、FFT 分析儀、高速資料獲取系統以及振動感測器、激振器 等技術的發展,配合各種分析原理的模態分析硬體與軟體應用,試驗模態分析在工 程應用上的發展快速,是設計者了解設計物結構行為快速而準確的工具。 圖 2-2. 彈性板的前幾個模態狀況
2.2 最佳化設計
2.2.1 最佳化設計簡介
結構最佳化設計(Structural optimization design)可分為尺寸最佳化設計 (Size optimization),形狀最佳化設計(Shape optimization design)和拓樸最佳 化設計(Topology optimization design)三種。如圖 2-3 所示,尺寸最佳化設計 是以改變結構的各部位尺寸,求取最佳設計而名,而形狀最佳化設計除了定義尺寸 大小外,亦定義邊界之曲線形狀,以獲得最佳形狀,如圖 2-4 所示。然而,此兩種 最佳化設計方法必須由設計者憑經驗給定的初始設計形狀,容易發生設計範圍太 廣,而且不同的初始設計變數會得到不同的局部最佳設計解(Local solution),而 且不當的初始設計變數在最佳化的迭代過程中會發散無法得到最佳解。拓樸最佳化 設計是在固定的設計區域(Design domain)內,以各種不同的方式,依據所有限定 的條件(如材料限制),對設計區域內之元素作取捨,構成物體的結構幾何形狀,發 揮最大的功能,達到我們的使用需求(例如求取最小的結構勁度或者最高自然頻 率),如圖 2-4 所示。拓樸最佳化設計的最大特點在於無須給予特定的初始形狀, 而是以全部的可設計範圍為初始形狀,再由最佳化系統判斷最佳幾何形狀,因此拓 樸最佳化設計可以說是結構最佳化設計的基礎,經由拓樸最佳化設計出的拓樸圖 形,再作為尺寸最佳化設計或形狀最佳化設計的初始設計形狀,可以避免由於不當 的初始設計變數而產生無法收斂的現象。[11] 圖 2-3.、尺寸最佳化設計 圖 2-4.、形狀最佳化設計 圖 2-5.、拓樸最佳化設計 Design domain Load Material moved Material kept Load D2 D3 D1 Load
2.2.2 最佳化設計
最佳化的方法在許多不同領域如數學、應用科學、工程、統計學、經濟學,都 有廣泛的應用。事實上整個工程設計程序是一個很自然的試誤(Try and Error)迴 圈形式的迭代程序,設計者不斷地在了解問題,思考、嘗試、產生新的設計方案, 最後在有限的條件與資源之下,採用一個最好可能的解決方案。例如,對於設計的 構件,為達成某些目標(如重量最輕或最少材料、最高的自然頻率、剛度與強度最 大等),在給定約束條件下,求出最好的設計方案,稱為結構最佳設計。如以結構 的材料最少化為目標,則稱為材料最佳化設計。依據不同假設所做的最佳化設計, 實際上是「在限制中選擇一個可能是最好的設計」。[13] 為什麼說是「在限制中選擇一個可能是最好的設計」,因為最佳化設計方法中 有三個最重要的元素: (1). 設計變數(design variable):可以控制並改變某些影響此設計 性能表現的因素。 (2). 狀態變數(State variables):是設計變數的函數。是在設計上 的「限制條件(constraint)」,最佳化在這些限制條件之內尋找 最好的設計。解最佳化設計問題的演算法,一般只能設定單一 的目標函數,在解多目標函數最佳化(multi-objective optimization)問題時,通常的作法,是先把多目標函數轉換成 單一目標函數,將另外的設計要求,寫成狀態變數變成是限制 條件。 (3). 目標函數(objective function):目標函數是設計變數的函數, 設計變數的改變會影響設計性能的好壞,即影響目標函數函數 值的大小。也就是為這個設計定義一個性能指標(performance index)。 由此可以看出,實際上在現實種種設計限制之下,不可能達到最好的設計,只 是在求取一個可能是最好的設計。另外在進行最佳化設計之前,基本的設計概念已 經確立,最佳化設計的程序似乎只是在為這個設計概念尋找最好的數值解。所以如 果基本的設計架構與設計變數選擇不適當,就直接影響到這個最佳化的結果。
在最佳化演算法的發展上,重點幾乎都在迭代形式的數值演算法。而一般迭代 形式最佳化數值演算法,都包括了初始值給定、迭代定義(iteration definition)、 以及終止要件(termination condition)三個部分;研究不同演算法時,各個演算 法的整體結構,則幾乎都是一致的,只是這三個部分(尤其是迭代定義的部分)的 內容各有不同。 例如,求
n
個設計變數xi (i
=1,2,…,n
),滿足m
個狀態變數(約束條 件)G j(xi) ≤ 0 (j
=1,2,…,m
),且使目標函數W (xi)為最小(或最大)。 設計變數xi 代表可以變化的各種結構參數,如構件截面積、厚度、材料性質等。 狀態變數(約束條件)Gj(xi) ≤ 0 (代表設計必須滿足的各種限制,例如結構各部位 的應力或變位不得超過規定的容許值或厚度尺寸不得超出給定的範圍,結構的頻率 不應落在某個禁止的範圍等。而目標函數則代表結構最佳化所追求的指標,例如, 結構體積最小和成本最低等可以定量的指標。另一方面因應不同需求也可將材料體 積作為約束條件,而把某種結構性能,例如頻率或剛度作為目標函數。在最佳化過 程中,依照設計變數、狀態變數與目標函數,給定初始值、迭代定義、以及終止條 件,就構成一個完整的最佳化過程。如何給定終止條件和迭代定義,通常都是利用 演算法迭代過程中產生的數值資訊來作判斷。例如,搜尋函數最小值,就像下山時 想走到最低的山谷,因為不知整個山的形狀,只能環顧四周,選定一個下坡的方向, 沿著這個方向一直走,直到沒有下坡的方向可以選擇,那麼很有可能已經到山谷 了,也就是找到最小值。這個演算法,叫做「梯度法(Gradient method)」,因為梯度(gradient)方向是 函數值下降的方向,為迭代定義中的搜尋方向。每當計算的函數值上升,我們便停 在這一點,重新計算這一點上的梯度方向,繼續沿著新的梯度方向向前走,直到函 數值再度上升,重新選擇梯度方向。如此不斷的迭代,直到某一點周圍所有點的函 數值都比現在更大,那麼這一點應該是最小點,整個搜尋便會終止。 當然在搜尋最佳化的方法還有很多,本研究使用的方法是,利用 ANSYS 最佳化 模組 Sub-problem 近似法,其作法是利用一個以均方根近似方法,產生二次狀態變 數與目標函數的近似函數,將題目定義為求解有約束性的最小化問題如(2-15 式)。 然後以罰函數(Penalty function)把有約束問題轉化成一個序列的無約束問題
(sequential unconstrained problem)的近似函數[17]進行最佳化求解。罰函數是 增加設計變數、狀態函數與目標函數收斂的因子,如果是一個足夠大的正數,會在 方程式起"懲罰"作用,稱之為罰因數,罰函數小則得到的結果就會越趨近最佳解。 利用求解最小化的目標,開始在每一次近似函數的迭代過程中進行最佳化,一直到 問題收斂或者因為某些設限要求而終止。至於如何給這些近似值,可以選擇自訂或 者亂數取樣。本研究中 ANSYS 給定設計變數是採電腦亂數取樣的隨機搜尋法,以工 程上最直覺、最直接的方法不斷調整設計變數,求得目標函數最小值。以下為 Sub-problem 近似法的數學表示。 假設狀態變數與目標函數可表示為下列的近似函數為: 目標函數 f = f ( x) 其近似函數 fˆ (x) = f (x) + error (2-13) 狀態變數w = w( x) 其近似函數wˆ (x) = w(x) + error (2-14) 其中可以用二次函數去表示目標函數或狀態函數的近似函數為
∑ ∑
∑
+ + = n i n j j i ij n i i ix b x x a a fˆ 0 (2-15) 其中, xi,xj為設計變數,且ai,bij 為以最小平方跟方法決定的加權係數, 例如以(2-16)式決定的加權係數。∑
= − = nd j j j j f f E 1 2 ) ( ) ( ) ( 2 ) ˆ ( φ (2-16) 其中,nd 代表為第 n 個可能的設計,φ ( j) 是 ANSYS 為 j 設計所採用的權重因 子,決定的方式與計算過程中,前一個計算值與最佳化值和可行的設計方案距最佳 設計的可能性有關,設計越接近目標值,其權重因子就越高(≤ 1 )。至於狀態函數 的近似函數決定的方式也類似目標函數,在這邊就不再額外做敘述。 接著,對狀態變數與目標函數的近似函數進行最小化設計,可將整個設計重新 表示為: ) ( ˆ f x f = (2-17)i i i x x x ≤ ≤ (i = 1,2,3,..., n) (2-18) i i i i i w x w w − γ ≤ ˆ ( ) ≤ − γ (i = 1,2,3,..., m1) (2-19) 其中,xi與wi分別為設計變數與狀態變數的下極限;xi ,wi 分別為設計變 數與狀態變數的上極限,γ 為容許誤差 i 接著,導入罰函數將目標函數轉寫為無約束化的 sub-problem 如下式: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + =
∑
∑
= = 3 1 1 0 ( ) ( ˆ ) ˆ ) , ( m i i n i i k k f f p X x W w p x F (2-20) 其中,,W (wˆi) 為加入罰函數的無約束設計變數與狀態變數;F (x, pk ) 為 加入罰函數的無約束目標函數, f0 是為了達成單一量而設的參考目標函數值。pk 是跟據F (x, pk ) 結果而產生的參數量,其數值會一直增加去達成最佳化的目標, 直到整個問題求解收斂。 罰函數導入的方法如 X (xi) 下,假設靠近設計變數的上極限值: ) , 3 , 2 , 1 ( ) ( ) /( c ) ( ) /( c ) ( 4 3 2 1 n i x x x x if x x c x x x x if x x c x X i i i i i = K ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − ≥ − + − − < − + = ε ε ) , 3 , 2 , 1 ( ) ( ˆ ) ˆ /( d ) ( ˆ ) ˆ /( d ) ( 1 4 3 2 1 m i w w w w if w w d w w w w if w w d w W i i i i i i i i i i i = K ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − ≥ − + − − < − + = εε 其中c1,c2 ,c3,c4 ,d1,d2,d3 與d4 皆為 ANSYS 程式內部的計算值, 為常數。ε 為很小的正數。ANSYS 解序列的無約束問題是以序列的無約束最小化技術(SUMT, Sequential Unconstrained Minimization Technique),SUMT 演算法如何決定下一個設計變數 的方法如下: ) ( ) ( ) ( ) (j ~ j j ~ j F F as x x → → (2-23) (2-21) (2-22)
其中, ( j) x 與x( j+1) 代表計算中第 j 個與第 j+1 個設計變數,F ( j) 代表第 j 個目 標函數;~ ( j) x ,F~ ( j) 代表序列的無約束最小化技術求出的值;C 是軟體自行依造 計算過成中產生的不可能解數量而決定,其數值介於 0~1。 Sub-problem 近似法的結果是由收斂性或終止條件決定,計算出來的解,其可 能的設計數量足夠,整個過程就會結束。 收斂性的產生判斷依據是以下列其中某一個條件達到而決定: τ ≤ − ( − )1 ) ( j j f f (2-25) τ ≤ − ( ) ) ( j b f f (2-26) ) , 3 , 2 , 1 ( ) 1 ( ) ( n i x x i j i j i − ≤ = K − ρ (2-27) ) , 3 , 2 , 1 ( ) 1 ( ) ( n i x x i j i j i − ≤ = K − ρ (2-28) 其中 ( j) x 與x( j−1) 分別代表目前第 j 個第 j-1 個可能的設計與,x( b) 代表最 佳的設計; ( j) f , f ( j−1), f ( b) 則為其對應的目標函數;τ 與ρ 代表目標函數i 與設計變數的誤差量。 至於終止條件則有兩種狀況: (1). Sub-problem 迭代的次數到達設定的最大迭代數目。 (2). 求算出來的連續不可能的數量超過設定的最大連續量。
2.3 有限元素法分析法
2.3.1 有限元素分析構成與模擬流程[10]
本章節將就電腦模擬有限元素分析方法與流程以 ANSYS 軟體為例,做一個簡單 的說明。 首先我們要知道 ANSYS 軟體的模擬,由以下三個基本要素組成: (1). 節點(Node):節點是構成有限元素系統的基本要件,是整個分析的 工程系統中,最基本的點,它代表著工程系統中的某一個點的空間 坐標位置。具有的可描述此點特性的自由度,自由度是該結構系統 受到外力後結構系統的反應狀況。 (2). 元素(Element): 元素是由節點與節點相連而成的單位。元素是構 成有限元素系統的基礎,在具有不同特性的材料和不同的結構當 中,可選用不同種類的元素,元素中包含了物理的各種特性,例如, ANSYS 提供了 100 多種不同的元素類型,合適的元素選擇將可以大 大提高計算精度和效率,故使用時必須慎重選擇元素型號。 (3). 自由度(Degree of Freedom):自由度在 ANSYS 中有重要意義,可以表示結構系統受到外力後結構系統的反應狀況。使用者在分析過程 中要對整體系統的自由度進行適當約束。而分析軟體本身在分析過 程中,會依每個節點本身所具備的座標系統和對應的節點自由度, 與不同元素的節點應該具有特定的自由度,做運算上的約束,以確 保分析系統的合理性。因此在結構分析中選擇合適的元素與模擬結 果息息相關。
ANSYS有限元素分析的基本流程如下,圖2-8: 圖 2-8. ANSYS 有限元素法分析的流程 以下將針對有限元素分析主要內容與方法作簡單說明: 1. 前處理(/PREP7,Preprocessor): (1). 選擇適當元素:依據分析物的結構特性,選定適當元素。在ANSYS 中,有許多種類的元素型態,基本上,分成「桿元素」、「板元素」、 「薄殼元素」、「體元素」,不同元素有不同適用的特性,其分析 結果也會有不同。而根據本研究分析的裝置,所以將使用SHELL63、 SOLID45進行分析。 定義分析模型 建立或引用幾何模型 建立有限元素模型 定義邊界條件與負載 求解 讀取分析結果 前處理/prep7 求解/Solu 以內建點,線,面,體方式建立 元素選擇與材料參數 網格生成 選擇求解器 定義求解的限制 匯入其它CAD軟體產生的模型 後處理/post1 /post26
圖2-7. Shell63 Element 圖2-8. Solid 45示意圖
(2). 給定材料性質:根據結構物使用材料輸入所需要的材料性質。基本 的結構分析至少需要楊氏係數與波松比,若進行材料非線性分析, 還要輸入應力-應變曲線。但是本研究並不考慮材料非線性狀況。 進行模態分析時必須再加入材料密度參數。 (3). 建立幾何:可依需求不同選擇由其它繪圖軟體匯入模型或者直接在 ANSYS中建立,本研究將利用ANSYS建立幾何模型。 (4). 建立分析網格:建立可以代表分析系統的網格,網格品質好壞對於 某些重要的觀察點的分析結果影響很大,必需要審慎進行網格建 立,這部份是有限元素法分析最耗時的步驟。 (5). 施加負載與邊界條件:依照實際狀況給定邊界條件,此部份關係分 析結果的正確性與合理性。至於如何將負載與邊界條件,詳實賦予 到分析模型中,這就考驗分析者對結構物的了解與經驗。 2. 求解(/SOLU,Solution) (1). 選定所要用的解析方式(ANTYPE),根據實際狀況設定分析型態, 並加入所需要的參數。本研究所用到的解析模組有: A. 模態分析模組: B. 最佳化分析模組: ANSYS模態分析方法有下列幾種方法:[12] [13]
選取某些重要的節點為主自由度,借由該主自由度定義分析系統的質 量矩陣[M]與勁度矩陣[K],並求取其頻率與模態,由此結果擴展到整 個系統,解法快速但有不準確的疑慮。方法如圖2-9.所示。 圖2-9. 降階法模態求解的方法 b. 次空間法(Subspace method),利用Jacobi反覆演算法,以整個系統 的質量矩陣[M]與勁度矩陣[K],可得到較精確的解,缺點是需要較大 量的記憶體與電腦運算能力
c. 區塊Lanczos法(Block lanczos method),是ANSYS內定的模態分析 方法。也是本研究選用的方法利用Lanczos演算法,用區塊向量完成 Lanczos循環運算。 d. 快速動力法(Powerdynamics method),解題速度快,但是如分析元 素有不合理形狀時,可能無法收斂求解。適合用於快速求解自由度超 大結構的前幾個模態狀況。 e. 非對稱法(Unsymmetrical method),此方法用於質量矩陣或剛性矩 陣非對稱系統。特徵值為複數,實數部份代表自然頻率,虛數部份代 表穩定度,虛數正值代表不穩定,負值代表穩定。 f. 阻尼法(Damped method),此方法用於結構有阻尼現象時,特徵值 為複數,虛數部份代表自然頻率,實數部份代表穩定度,實數正值代 表不穩定,負值代表穩定。 a). 由原系統選取主自由度 b). 簡化系統 d). 擴展至整個系統結果 c). 求取簡化系統的結果 結果擴展
ANSYS最佳化分析有下列幾種方法:[15] [16]
a. Sub-problem逼近法:這是一種零階的最佳化方法,它只須定義狀態 變數(State variables)與目標函數(Objective function)這些非獨 立變數。將這些變數利用均方根近似表示並以罰函數(Penalty function) b. 一次法:主要是建立在設計敏感度上,適合有高精度須求的問題。 最佳化變數(Optimization variables): i. 設計變數(Design variables):是一個獨立量,改變設計變數去達 到最佳化設計的目地。其設計變數的選擇方式有:單一回圈法 (Single loop method)、隨機法(Random method)、掃描法(Sweep method)、變數法(Factorial method)和梯度法(Gradient method) 等工具。本研究採內定的隨機法應用。
ii. 狀態變數(State variables):它是一個反應量,是設計變數的函 數。也是一個限制條件,可以利用它來當某些目標在計算過程的 極限規範。
iii. 目標函數(Objective function):設計最佳化的目標,它是設計 變數的函數,ANSYS中只能定義一個目標函數。
(2). 求解(Solve):軟體依據所設定的模型、參數條件、解析的方法… 等,進行數值求解。
3. 後處理(/POST1 and /POST26,Postprocessor)
這個階段之前已經完成所有分析,不同求解的方法會有不太相同的結果 檔(*.rth ,*.rth,*.mode,*.opo …等)儲存所需的分析資料。在這些 檔案中,包含所有計算的資料,可以直接取得整體或局部的應力或應變值, 或者其它有興趣的數值,其內容端看分析之初所下的命令解為何。 後處理可以將 ANSYS 所計算求得的結果,利用表列、各種圖型、顏 色表示出來,讓使用者可以直覺的判斷結果是否合理、是否具有參考價
值。最後,也可以利用後處理器將結果集結成報告,讓分析結果可讀性 更高。
2.3.2 ANSYS 參數設計語言(APDL)輔助最佳化分析
有限元素軟體 ANSYS 可以使用 ANSYS 參數設計語言(ANSYS Parametric Design Language, APDL)設計分析指令,簡化命令流[09]。ANSYS 參數設計語言,這是一種 能讓使用者在讓一般工作上自動化,利用參數(變數)組合來建造所需模型的命令式 語言程式,它可以達到和圖形介面指令操作相同目的,甚至如果使用者熟悉 ANSYS 指令的話,它可能會超出您預期的數倍的工作效率。ANSYS 參數設計語言也涵蓋其 他特徵範圍(例如重複命令、巨集),如分歧(branching)、迴圈(do-loops),以及 純量、向量和矩陣運算,在這些功能的交互應用下,處理複雜而繁複的問題也非難 事,可提供使用者在日常的分析裡很多方便性。當 APDL 用來分析較複雜或反覆性 的問題時,就可以發揮其強大的優點,例如本研究的重點,模態分析的設計最佳化, 須要反覆做結構變更與運算,如果利用參數設計指令就可以省去,繁複的建構網格 化模型的時間。 APDL 運用最具效率的例子大多是在最佳化模組分析,因為利用 APDL 迴圈設計 結構,可以將幾何形狀參數化,進行解析的時候變更目標函數與控制變數就非常方 便,對於需要反覆疊代或者多重控制因素的運算變更,可以提供很方便的模型建立 與模擬運算。例如以應力分析為控制參數時,ANSYS 會反覆計算應力值,再我們設 定的應力範圍下,取得最佳的幾何形狀參數值。而從可以查閱到的文獻中可以發 現,目前大多數 APDL 的運用,主要都是研究應力最佳化的範疇。但在本研究中將 會試圖使用基本的 APDL 指令,來建立模態分析模型,一方面讓分析的指令更為簡 潔,另一方面減少建立分析模型時間,讓分析的過程更加快速。 進行最佳化過程中,先藉由有限元素軟體 ANSYS 內附的參數設計語言撰寫參數及
構之特徵值與特徵向量矩陣,代入最佳化程式以 Sub-problem 逼近法,再對此結構進 行模態最佳化分析,判別所得結果是否符合需求,藉此達成結構自然振動頻率最佳化 的目標。
第三章
模態分析
3.1 穿透式平順圖像裝置有限元素分析模型之建立
本研究對於穿透式平順圖像裝置的電腦輔助模態分析與最佳化分析將以 ANSYS 8.0 有限元素分析軟體,進行模擬分析,分析的流程如圖 3-1 所示。穿透式 圖像平順裝置的分析的模型將分別建立以 Shell element 與 Solid element 進行 分析,並探討這兩者的差別,確認模型的正確性後,進一步再利用這兩個模型進 行最佳化分析。
本章節主要介紹分別以 Shell element 與 Solid element 模擬出來的模態分 析結果,並由這中間的差異性決定要如何應用這兩種模型。 圖 3-1 穿透式平順圖像裝置有限元素分析模型建立之流程 定義分析模型範圍 建立或引用幾何模型 建立有限元素模型 定義邊界條件與負載 求解 讀取分析結果 /prep7 /Solu 以內建點、線、面、體方式建立參數化模型 /post1 /post26 選定模擬物件包括:彈片、鏡片、鏡片載座、線圈 以參數化命令建立網格化模型 以參數化命令給定邊介條件與負載 1.設定求解器為模態分析與最佳化模組 2.設定設計變數、狀態函數、目標函數
3.1.1
模型模擬假設條件
關於本研究中的模型建立與解析的假設條件、邊界條件,可以簡略說明如下 幾點: (1). 穿透式平順圖像裝置與光機鏡頭介面為堅硬不變形。 (2). 鏡片與載座之間、音圈線圈與載座之間也是堅硬不變形。 (3). 鏡片載座的運動模式為一個定軸向的旋轉運動,簡化可視為一個單純 的旋轉系統裝置。 (4). 彈片與載座之間、彈片與基座之間的固定狀況良好。 (5). 不考慮材料不良的因素。3.1.2 有限元素分析模型說明
在做結構動態最佳化之前,先為現有的穿透式平順圖像裝置進行 ANSYS 參數 化的模型化設計,以 ANSYS 進行有限元素法分析,求得目前設計的變形狀況與模 態特性。將此一結果列為本研究中的比對基準,經由這些資訊的判斷可以獲得改 善設計的參考依據。 本分析模型是利用 ANSYS 8.0 以參數化設計建立而成。其使用到的材料參數 如下表所示: 表 3-1 穿透式平順圖像裝置材料性質參數表Part name Material Density ρ(g/mm3) Young's modulus E (MPa) (N/mm2) Poisson's ratio Yield Strength (MPa)
Base AZ91D 1.81E-03 4.48E+04 0.35 - Spring SUS301 7.87E-03 1.93E+05 0.29 205 lens B270 2.55E-03 7.15E+04 0.208 - VCM coil(Cu) Cu 8.96E-03 1.10E+05 0.343 -
Screw Steel 7.87E-03 1.93E+05 0.29 - 厄鐵 S15C 7.87E-03 1.93E+05 0.29 -
使用元素型式:
1. Shell 63, Quad type 2. Solid 45, Hex type 元素大小:1.0mm
Shell element 模型示意圖:
1
X
YZ
Transmittance Smooth Picture Optimization JUL 19 2007 23:17:16 ELEMENTS MAT NUM U ROT 1 X Y Z
Transmittance Smooth Picture Optimization JUL 19 2007 23:16:03 ELEMENTS MAT NUM U ROT 1 X Y Z
Transmittance Smooth Picture Optimization JUL 19 2007 23:16:57 ELEMENTS MAT NUM U ROT
圖 3-2 Shell element 穿透式平順圖像裝置 ANSYS 幾
圖 3-4 Shell element 穿透式平順圖像裝置 ANSYS 網格化與邊界條件 圖 3-3 Shell element 穿透式平順圖像裝置 ANSYS 網格化與邊
支撐彈片 音圈 鏡片載座 鏡片 拘束點 拘束點 z x 拘束點 拘束點 拘束點 拘束點 y x
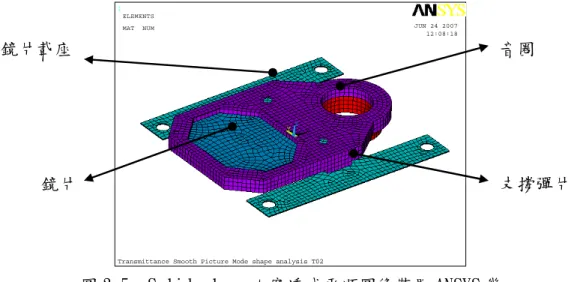
Solid element 模型示意圖:
1
X
Y Z
Transmittance Smooth Picture Mode shape analysis T02 JUN 24 2007 12:08:18 ELEMENTS MAT NUM 1 X Y Z
Transmittance Smooth Picture Mode shape analysis T02
JUN 24 2007 11:53:52 ELEMENTS MAT NUM U ROT 1 X Y Z
Transmittance Smooth Picture Mode shape analysis T02
JUN 24 2007 11:54:17 ELEMENTS MAT NUM U ROT
圖 3-5 Solid element 穿透式平順圖像裝置 ANSYS 幾
圖 3-7 Solid element 穿透式平順圖像裝置 ANSYS 網格化與邊界條件 圖 3-6 Solid element 穿透式平順圖像裝置 ANSYS 網格化與邊界
支撐彈片 音圈 鏡片載座 鏡片 拘束點 拘束點 z x 拘束點 拘束點 拘束點 拘束點 y x
3.2 模擬原型模型分析結果
3.2.1 模擬原型模態分析結果
本節將 ANSYS 模型以 Shell element 模擬的前 10 個模態與自然頻率列出, 並觀察其模態變化的狀況,將與 Solid element 模擬的結果互相比較。 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 73.649 147.299220.948294.598368.247441.897515.546589.196662.845 JUL 19 2007 22:48:47 NODAL SOLUTION STEP=1 SUB =1 FREQ=73.643 USUM (AVG) RSYS=0 DMX =662.845 SMX =662.845 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 75.573 151.146226.719302.292377.865453.438529.01 604.583680.156 JUL 19 2007 22:49:16 NODAL SOLUTION STEP=1 SUB =2 FREQ=129.035 USUM (AVG) RSYS=0 DMX =680.156 SMX =680.156 圖 3-8 第 1 模態 73.64 Hz 圖 3-9 第 2 模態 129.04 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 61.449 122.897 184.346 245.794 307.243 368.691 430.14 491.589 553.037 JUL 19 2007 22:49:50 NODAL SOLUTION STEP=1 SUB =3 FREQ=219.317 USUM (AVG) RSYS=0 DMX =553.037 SMX =553.037 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 261.363 522.727 784.09 1045 1307 1568 1830 2091 2352 JUL 19 2007 22:50:09 NODAL SOLUTION STEP=1 SUB =4 FREQ=1249 USUM (AVG) RSYS=0 DMX =2352 SMX =2352 圖 3-10 第 3 模態 219.32 Hz 圖 3-11 第 4 模態 1249.3 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 258.964 517.928 776.891 1036 1295 1554 1813 2072 2331 JUL 19 2007 22:50:35 NODAL SOLUTION STEP=1 SUB =5 FREQ=1275 USUM (AVG) RSYS=0 DMX =2331 SMX =2331 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 215.724 431.448 647.172 862.896 1079 1294 1510 1726 1942 JUL 19 2007 22:52:27 NODAL SOLUTION STEP=1 SUB =6 FREQ=2132 USUM (AVG) RSYS=0 DMX =1942 SMX =1942 圖 3-12 第 5 模態 1274.7 Hz 圖 3-13 第 6 模態 2132.1 Hz
1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 215.634431.267646.901862.5351078 1294 1509 1725 1941 JUL 19 2007 22:52:43 NODAL SOLUTION STEP=1 SUB =7 FREQ=2133 USUM (AVG) RSYS=0 DMX =1941 SMX =1941 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 387.994775.9891164 1552 1940 2328 2716 3104 3492 JUL 19 2007 22:53:19 NODAL SOLUTION STEP=1 SUB =8 FREQ=2971 USUM (AVG) RSYS=0 DMX =3492 SMX =3492 圖 3-14 第 7 模態 2132.6 Hz 圖 3-15 第 8 模態 2971.2 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 50.966 101.932 152.898 203.864 254.829 305.795 356.761 407.727 458.693 JUL 19 2007 22:54:00 NODAL SOLUTION STEP=1 SUB =9 FREQ=3365 USUM (AVG) RSYS=0 DMX =458.693 SMX =458.693 1 MN MX X Y Z
Transmittance Smooth Picture Optimization 0 271.981 543.962 815.942 1088 1360 1632 1904 2176 2448 JUL 19 2007 22:54:26 NODAL SOLUTION STEP=1 SUB =10 FREQ=3710 USUM (AVG) RSYS=0 DMX =2448 SMX =2448 圖 3-16 第 9 模態 3365.3 Hz 圖 3-17 第 10 模態 3709.7 Hz 由上列圖形可以看出穿透式圖像平順圖像裝置的自然模態之振形現象與共 振頻率,圖 3-8 為第一自然振動頻率為上方鏡片載座,因裝置質心分怖產生的自 然擺動的現象,與預期的狀況相符,這個運動行為與此裝置正常運作時的動作相 同,對於結構共振的影響性最大。圖 3-9 是第二自然振動頻率其運動模式為下方 彈片的第一個彎矩模態,其運動行為為上下移動的現象,如果真實系統發生此問 題時,並不會明顯在畫面上而被察覺,所以此一共振點並不一定須要避免。而圖 3-10 是第三自然振動頻率,其運動為 Rx 方向的轉動現象,此一行為是會影響到裝 置的效能,必須要去注意避免共振;接下來的第四、五、六、七與第八自然振動 頻率由模擬的模態狀況看來,發生的現象都只與下方的彈片有關,並不影響上方 鏡片載座自然運動的狀況。第九自然振動頻率,圖 3-16 上方載座有部份會受影響 應列入觀察的項目中。第十自然振動頻率,發生的現象與下方的彈片有關,並不 影響上方鏡片載座運動。
Shell element 模擬結果討論: 1. Shell element 模態分析結果顯示,第一自然頻率為 73.63Hz. 2. Shell element 模態分析分佈如圖 3-18 所示,前三個自然頻率低於 1000Hz,且其運動行為對於穿透式圖像平順圖像裝置的效能有直接的影 響。 3. 主要影響的模態振動的行為是鏡片載座產生運動。 4. 大於 1000Hz 以上的模態行為,都是與下方彈片有關,並不會直接影響到 上方的轉動載座。
Shell element model natural frequency
0 1000 2000 3000 4000 1 2 3 4 5 6 7 8 9 10 Mode Frequency, Hz 圖 3-18 Shell element 元素模態
3.3 Solid element 模擬原型模型分析結果
3.3.1 模擬原型模態分析結果
為了瞭解不同元素間模擬的結果差異性,另外由 ANSYS 使用 Solid element 進行模態分析得到的結果如下圖: 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -478.78 -360.036 -241.291 -122.547 -3.802 114.942 233.687 352.431 471.176 589.92 JUN 30 2007 00:08:22 NODAL SOLUTION STEP=1 SUB =1 FREQ=76.678 UZ (AVG) RSYS=0 DMX =596.477 SMN =-478.78 SMX =589.92 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -478.78 -360.036 -241.291 -122.547 -3.802 114.942 233.687 352.431 471.176 589.92 JUN 29 2007 23:53:28 NODAL SOLUTION STEP=1 SUB =1 FREQ=76.678 UZ (AVG) RSYS=0 DMX =596.477 SMN =-478.78 SMX =589.92 圖 3-19 Solid 第 1 模態 76.67 Hz 圖 3-20 Solid 第 1 模態 76.67 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -1.233 40.318 81.87 123.422 164.974 206.525 248.077 289.629 331.181 372.732 JUN 30 2007 00:07:47 NODAL SOLUTION STEP=1 SUB =2 FREQ=104.738 UZ (AVG) RSYS=0 DMX =372.999 SMN =-1.233 SMX =372.732 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -1.233 40.318 81.87 123.422 164.974 206.525 248.077 289.629 331.181 372.732 JUN 29 2007 23:54:52 NODAL SOLUTION STEP=1 SUB =2 FREQ=104.738 UZ (AVG) RSYS=0 DMX =372.999 SMN =-1.233 SMX =372.732 圖 3-21 Solid 第 2 模態 104.74 Hz 圖 3-22 Solid 第 2 模態 104.74 Hz
1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -559.137 -434.175 -309.213 -184.251 -59.289 65.673 190.635 315.597 440.559 565.521 JUN 30 2007 00:06:18 NODAL SOLUTION STEP=1 SUB =3 FREQ=225.926 UZ (AVG) RSYS=0 DMX =583.49 SMN =-559.137 SMX =565.521 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -559.137 -434.175 -309.213 -184.251 -59.289 65.673 190.635 315.597 440.559 565.521 JUN 29 2007 23:55:22 NODAL SOLUTION STEP=1 SUB =3 FREQ=225.926 UZ (AVG) RSYS=0 DMX =583.49 SMN =-559.137 SMX =565.521 圖 3-23 Solid 第 3 模態 225.93 Hz 圖 3-24 Solid 第 3 模態 225.93 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -97.464 242.709 582.881 923.053 1263 1603 1944 2284 2624 2964 JUN 30 2007 00:06:51 NODAL SOLUTION STEP=1 SUB =4 FREQ=1231 UZ (AVG) RSYS=0 DMX =2964 SMN =-97.464 SMX =2964 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -97.464 242.709 582.881 923.053 1263 1603 1944 2284 2624 2964 JUN 29 2007 23:55:50 NODAL SOLUTION STEP=1 SUB =4 FREQ=1231 UZ (AVG) RSYS=0 DMX =2964 SMN =-97.464 SMX =2964 圖 3-25 Solid 第 4 模態 1231.2 Hz 圖 3-26 Solid 第 4 模態 1231.2 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -1120 -671.333 -222.725 225.884 674.493 1123 1572 2020 2469 2918 JUN 30 2007 00:05:09 NODAL SOLUTION STEP=1 SUB =5 FREQ=1287 UZ (AVG) RSYS=0 DMX =2918 SMN =-1120 SMX =2918 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -1120 -671.333 -222.725 225.884 674.493 1123 1572 2020 2469 2918 JUN 29 2007 23:57:44 NODAL SOLUTION STEP=1 SUB =5 FREQ=1287 UZ (AVG) RSYS=0 DMX =2918 SMN =-1120 SMX =2918 圖 3-27 Solid 第 5 模態 1287.1 Hz 圖 3-28 Solid 第 5 模態 1287.1 Hz
1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -2692 -2084 -1476 -867.51 -259.447 348.617 956.681 1565 2173 2781 JUN 30 2007 00:04:48 NODAL SOLUTION STEP=1 SUB =6 FREQ=2113 UZ (AVG) RSYS=0 DMX =2781 SMN =-2692 SMX =2781 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -2692 -2084 -1476 -867.51 -259.447 348.617 956.681 1565 2173 2781 JUN 29 2007 23:58:08 NODAL SOLUTION STEP=1 SUB =6 FREQ=2113 UZ (AVG) RSYS=0 DMX =2781 SMN =-2692 SMX =2781 圖 3-29 Solid 第 6 模態 2113.3 Hz 圖 3-30 Solid 第 6 模態 2113.3 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -2737 -2114 -1492 -869.643 -247.333 374.978 997.288 1620 2242 2864 JUN 30 2007 00:04:27 NODAL SOLUTION STEP=1 SUB =7 FREQ=2161 UZ (AVG) RSYS=0 DMX =2864 SMN =-2737 SMX =2864 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -2737 -2114 -1492 -869.643 -247.333 374.978 997.288 1620 2242 2864 JUN 29 2007 23:58:31 NODAL SOLUTION STEP=1 SUB =7 FREQ=2161 UZ (AVG) RSYS=0 DMX =2864 SMN =-2737 SMX =2864 圖 3-31 Solid 第 7 模態 2161.2 Hz 圖 3-32 Solid 第 7 模態 2161.2 Hz 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 -10.932 41.886 94.703 147.521200.338253.156305.973358.791411.608464.426 JUN 30 2007 00:03:47 NODAL SOLUTION STEP=1 SUB =8 FREQ=2914 UY (AVG) RSYS=0 DMX =479.968 SMN =-10.932 SMX =464.426 1 MN MX X Y Z
Transmittance Smooth Picture Mode shape analysis T02 0 53.33 106.66 159.989213.319266.649319.979373.308426.638479.968 JUN 30 2007 21:05:13 NODAL SOLUTION STEP=1 SUB =8 FREQ=2914 USUM (AVG) RSYS=0 DMX =479.968 SMX =479.968 圖 3-33 Solid 第 8 模態 2914.4 Hz 圖 3-34 Solid 第 8 模態 2914.4 Hz


![圖 1-5.、在經過 SP 的作用後,其在畫面上所呈現的狀況 [圖 1-5.]說明了經過平順圖像裝置處理後,所展示出來的畫面品質與原先在水 平及垂直方向的訊號相同,只是顯示出來的時間。在 DMD 晶片上只使用原先一半的 微鏡片(縱向的微鏡片減半),並將彼此微鏡片間的間隙改為菱形,如此所產生的影 像結果,最終所產生影像的解析度品質,將倍增於微鏡片的數量,並且也沒有在兩 個像素之間出現菱形間隙的陰影。 一般情狀下其控制的方法是當輸入訊號是在色輪(Color Wheel)旋轉到藍色濾 光片時,進行訊號轉換,當](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504558.185436/19.892.175.760.117.332/鏡片間果最終所產生影像解析度品質將倍增於微鏡片數量一般情換當.webp)