國 立 交 通 大 學
運輸科技與管理學系
碩 士 論 文
用路價值對機車違規意向之研究分析
The Effect of Road Use Value on Motorcyclist’s
Violation Riding Intention
研究生: 吳世杰
指導教授: 張新立
用路價值對機車違規意向之研究分析
The Effect of Road Use Value on Motorcyclist’s Violation Riding
Intention
研究生: 吳世杰 Student: Shih-Chieh Wu
指導教授: 張新立 Advisor: Hsin-Li Chang
國立交通大學
運輸科技與管理學系
碩士論文
A Thesis
Submitted to Department of Transportation Technology and Management
College of management
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
In
Transportation Technology and Management
July 2012
Hsinchu, Taiwan , Republic of China
i
用路價值對機車違規意向之研究分析
研究生: 吳世杰 指導教授: 張新立
國立交通大學運輸科技與管理學系碩士班
摘要
本研究之目的在探索道路使用價值對機車駕駛人違規意向之影響。本研究首 先透過文獻回顧瞭解價值觀之概念,嘗試對道路使用價值進行定義並建構量測工 具,繼而再依據理性行為理論構建出價值、態度與意向的基本模型,並加入感知 行為控制作為調節變量,最後則利用結構方程模式驗證機車駕駛人之用路價值對 機車違規意向之因果關係。本研究以台南地區 271 位有效之調查樣本進行實證分 析,機車駕駛人之用路價值經探索性因素分析後計得到(1)安全、(2)自我風格的 實現、(3)自我尊重、(4)和諧的社會、(5)愉快與(6)滿足自我等六個道路使用價 值構面。而結構方程模式之路徑分析則進一步發現「自我風格的實現」及「愉快」 對機車違規行為意向有顯著的正向影響;加入感知行為控制作為調節變量並未達 到預期之效果;安全的價值對違規行為意向也沒有預期之顯著影響力。本研究之 實證研究結果可作為制訂抑制機車交通違規行為對策之參考。 關鍵詞: 用路價值、機車違規意向、調節變量、探索性因素分析、結構方程模式ii
The Effect of Road Use Value on Motorcyclist’s Violation Riding Intention
Student: Shih-Chieh Wu Advisor: Hsin-Li Chang
Department of Transportation Technology and Management
National Chiao Tung University
Abstract
This study was conducted to explore the effect of road use value on motorcyclists’ violation riding intention. Through reviewing the literatures related to value, the road use value was then defined and its measurement scale was developed as well. Furthermore, based on the theory of reasoned behavior (TRB), a basic model was constructed by value, attitude, and violation riding intention, which was added with the perceived behavior control as a moderator variable. Finally, the structural equations model (SEM) was employed to conduct the path analysis for the developed model. A total of 271 effective questionnaires collected from the motorcyclists in Tainan area were used for this empirical study. Through the exploratory factor analysis (EFA), six constructs were derived for motorcyclists’ road use value. They are (1) safety, (2) self-accomplishment of style, (3) self-respect (4) a society at peace, (5) cheerfulness and (6) self-fulfillment. The results of path analysis for the developed structural equations model indicated that self-accomplishment of style and cheerfulness had significantly positive effect on motorcyclists’ violation riding intention, but the perceived behavior control and safety value did not have significant influence on violation riding intention. It is expected that the research result would be helpful for reducing violation riding intention on policy making.
Keywords: Road use value, Motorcyclist’s violation riding intention, Moderator variable, Exploratory factor analysis, Structural equations model.
iii
誌 謝
歲月如梭,匆匆兩年過去,碩士班生涯終於要畫下句點。本論文得以順利完成, 承蒙恩師 張新立教授的悉心指導,感激之情溢於言表。撰寫論文期間,從問題尋找、 題目訂定、研究架構、研究方法等,張老師總是不厭其煩的細心教誨與指正,並嚴謹 的檢視每一論文細節,一一加以指導改善,對於日常生活方面,張老師也總是細心地 教導學生應有的態度。 並感謝中央警察大學 曾平毅教授及淡江大學 陳菀蕙教授撥冗審閱論文,惠與寶 貴的意見,並加以指正論文中疏漏之處,使論文更臻完善,也感謝系上師長給予知識 方面的教導,讓我在研究期間能有更多的知識作為後盾,使研究進行的更為順利,在 此向老師們致上最深的謝意。 感謝研究室的眾多學長姊們,博士班的賓權學長、昌谷學長、晉光學長、東石學長、 則斌學長、竣凱學長、祈延學長及忠漢學長,還有誠達學長、兆翔學長、瑋婕學姊、 芝嶸學姊在論文研究期間給予鼓勵及指點迷津,還有一起打拼的同窗,在學業或研究 上的互相切磋底勵和成長。感謝學弟承澤、學妹菁倫、學妹翊雅、學妹以雯的支持, 讓我可以無後顧之憂專心於論文,並特別地感謝竣凱學長在論文上給予的指導和意見 及誠達學長在電腦問題上的幫助。 最後感謝家人在求學期間的支持和包容,讓我可以安心的完成學業。感激之情一 言難盡,僅以此成果獻給您們,感謝您們大家。並感謝我自己在遭遇困難及挫折時並 沒有臨陣脫逃,感謝「毅力」這個好朋友。 吳世杰 謹誌 中華民國一百零一年七月 於風城交大
iv
目錄
摘要 ... i Abstract ... ii 誌 謝 ... iii 目錄 ... iv 表目錄 ... vi 圖目錄 ... viii 第一章 緒論 ... 1 1.1 研究背景及動機 ... 1 1.2 研究目的 ... 2 1.3 研究範圍 ... 2 1.4 研究流程 ... 3 第二章 文獻回顧 ... 5 2.1 價值觀的定義 ... 5 2.2 價值觀對行為的影響 ... 6 2.3 駕駛行為相關文獻 ... 7 2.4 理性行動理論相關文獻 ... 8 2.4.1 態度(Attitude) ... 9 2.4.2 主觀規範(Subjective norm) ... 9 2.4.3 意向(Intension) ... 10 2.4.4 行為(Behavior) ... 10 2.5 計畫行為理論 ... 10 2.6 小結 ... 12 第三章 研究方法 ... 13 3.1 研究架構 ... 13 3.2 因子分析 ... 14 3.2.1 探索性因子分析 ... 14 3.2.2 探索性因子分析步驟 ... 14 3.3 效度分析 ... 16 3.4 結構方程模式 ... 16 第四章 資料收集與分析 ... 18 4.1 調查計畫 ... 18 4.2 問卷設計 ... 18 4.2.1 機車違規行為的量測種類 ... 19 4.2.2 意向的量測 ... 19v 4.2.3 感知行為控制的量測 ... 19 4.2.4 態度的量測 ... 21 4.2.5 價值觀的量測 ... 21 4.3 問卷初測樣本結構分析 ... 23 4.3.1 態度構面因素分析 ... 25 4.3.2 感知行為控制構面因素分析 ... 25 4.3.3 意向構面因素分析 ... 26 4.3.4 價值構面因素分析 ... 26 第五章 模型分析 ... 30 5.1 樣本結構分析 ... 30 5.2 因素分析與測量模式分析 ... 30 5.2.1 因素分析 ... 30 5.2.2 測量模式分析 ... 34 5.3 因果模式(Causal Modeling)分析 ... 36 5.3.1 假設模式驗證 ... 36 5.3.2 安全價值對態度、違規意向的因果模式分析(D1、E1、F1 驗證) ... 38 5.3.3 自我風格的實現價值對態度、違規意向的因果模式分析(D2、E2、F2 驗證) ... 40 5.3.4 自我尊重價值對態度、違規意向的因果模式分析(D3、E3、F3 驗證) ... 43 5.3.5 和諧的社會價值對態度、違規意向的因果模式分析(D4 、E4、F4 驗證) 46 5.3.6 愉快價值對態度、違規意向的因果模式分析(D5、E5 驗證) ... 49 5.3.7 滿足自我價值對態度、違規意向的因果模式分析(D6、E6、F5 驗證) ... 52 5.4 變異數分析 ... 55 第六章 結論與建議 ... 62 6.1 結論 ... 62 6.2 建議 ... 64 參考文獻 ... 65 附錄 一 價值探索問卷 ... 69 附錄 二 初測問卷 ... 70 附錄 三 正式問卷 ... 73
vi
表目錄
表 1.1 道路交通事故統計表 ... 2 表 1.2 道路交通事故肇事故原因 ... 3 表 2.1 Rokeach 價值調查表 ... 5 表 3.1 KMO 統計量表 ... 15 表 3.2 結構方程模式適配度指標表 ... 17 表 4.1 感知行為控制構面問卷項目 ... 19 表 4.2 意向構面問卷項目 ... 20 表 4.3 態度構面問卷項目 ... 21 表 4.4 先行性探測問卷受訪者結構分析 ... 22 表 4.5 價值觀構面問卷項目 ... 23 表 4.6 問卷樣本結構分析 ... 24 表 4.7 問卷各構面試題信度分析 ... 25 表 4.8 態度構面因素負荷量 ... 25 表 4.9 感知行為控制構面因素負荷量 ... 26 表 4.10 意向構面因素負荷量 ... 26 表 4.11 轉軸後的因素負荷矩陣 ... 27 表 4.12 價值觀各構面試題信度分析 ... 28 表 4.13 價值觀各題項因素構面表 ... 29 表 5.1 問卷各構面試題信度分析 ... 30 表 5.2 問卷樣本結構分析表 ... 31 表 5.3 轉軸後的成分矩陣因素負荷表 ... 32 表 5.4 構面因素與各相關題項表 ... 33 表 5.5 價值觀各構面試題信度分析 ... 33 表 5.6 態度、感知行為控制、意向構面因素負荷量 ... 34 表 5.7 態度、意向、感知行為控制構念構念適配度指標 ... 35 表 5.8 各構面收斂效度分析 ... 35 表 5.9 各構面區別效度分析 ... 36 表 5.10 價值觀對態度及違規意向的效果假設驗證 ... 37 表 5.11 安全價值與態度及違規意向之間的係數估計及相關係數平方值 ... 38 表 5.12 模型適配度指標 ... 39 表 5.13 安全價值以感知行為控制為調節變量與態度及違規意向的係數估計 及相關係數平方值 ... 40 表 5.14 模型適配度指標 ... 40 表 5.15 自我風格的實現價值與態度及違規意向之間的係數估計及相關係數 平方值 ... 41vii 表 5.16 模型適配度指標 ... 41 表 5.17 自我風格的實現價值以感知行為控制為調節變量與態度及違規意向 的係數估計及相關係數平方值 ... 43 表 5.18 模型適配度指標 ... 43 表 5.19 自我尊重的價值觀與態度及違規意向之間的係數估計及相關係數平 方值 ... 44 表 5.20 模型適配度指標 ... 44 表 5.21 自我尊重的價值以感知行為控制為調節變量與態度及違規意向的係 數估計及相關係數平方值 ... 46 表 5.22 模型適配度指標 ... 46 表 5.23 和諧的社會價值觀與態度及違規意向之間的係數估計及相關係數平 方值 ... 47 表 5.24 模型適配度指標 ... 47 表 5.25 和諧的社會價值以感知行為控制為調節變量與態度及違規意向的係 數估計及相關係數平方值 ... 49 表 5.26 模型適配度指標 ... 49 表 5.27 愉快的價值觀與態度及違規意向之間的係數估計及相關係數平方值50 表 5.28 模型適配度指標 ... 50 表 5.29 愉快價值以感知行為控制為調節變量與態度及違規意向的係數估計 及相關係數平方值 ... 51 表 5.30 模型適配度指標 ... 502 表 5.31 滿足自我價值觀與態度及違規意向之間的係數估計及相關係數平方 值 ... 53 表 5.32 模型適配度指標 ... 53 表 5.33 滿足自我價值以感知行為控制為調節變量與態度及違規意向的係數 估計及相關係數平方值 ... 54 表 5.34 模型適配度指標 ... 55 表 5.35 性別與各構面的變異數分析 ... 56 表 5.36 年齡與各構面的變異數分析 ... 56 表 5.37 擁有駕照期間與各構面的變異數分析 ... 57 表 5.38 擁有機車種類與各構面的變異數分析 ... 57 表 5.39 考照前是否需要提供「安全騎車」教學指導與各構面的變異數分析58 表 5.40 平均每月所得與各構面的變異數分析 ... 59 表 5.41 每月平均騎車里程與各構面的變異數分析 ... 59 表 5.42 教育程度與各構面的變異數分析 ... 60 表 5.43 機車事故經驗與各構面的變異數分析 ... 60 表 5.44 機車違規被取締經驗與各構面的變異數分析 ... 601
viii
圖目錄
圖 1.1 研究流程 ... 4 圖 2.1 價值觀與社會文化、態度相互關係 ... 7 圖 2.2 理性行動理論結構圖 ... 8 圖 2.3 計畫行為理論結構圖 ... 11 圖 3.1 研究架構圖 ... 13 圖 5.1 安全價值對態度及違規意向的影響 ... 38 圖 5.2 安全價值以感知行為控制為調節變量對態度及違規意向的影響 .... 39 圖 5.3 自我風格的實現價值對態度及違規意向的影響 ... 41 圖 5.4 自我風格的實現價值以感知行為控制為調節變量對態度及違規意向 的影響 ... 42 圖 5.5 自我尊重價值對態度及違規意向的影響 ... 44 圖 5.6 自我尊重價值以感知行為控制為調節變量對態度及違規意向的影響425 圖 5.7 和諧的社會價值對態度及違規意向的影響 ... 47 圖 5.8 和諧的社會價值以感知行為控制為調節變量對態度及違規意向的影 響 ... 48 圖 5.9 愉快價值對態度及違規意向的影響 ... 50 圖 5.10 愉快價值以感知行為控制為調節變量對態度及違規意向的影響 ... 51 圖 5.11 滿足自我價值對態度及違規意向的影響 ... 52 圖 5.12 滿足自我價值以感知行為控制為調節變量對態度及違規意向的影響54- 1 -
第一章 緒論
1.1 研究背景及動機
近年來輿論對於交通違規行為的探討及改善,大多以交通處罰為對象,鮮少針對 交通行為心理因素加以探討。最近台灣這幾年來對於交通違規的焦點大多集中在酒駕 的刑罰上面,而大多數所使用的方法,為對交通違規行為祭以重罰為傾向。 依據過去統計資料分析,交通意外的發生和交通違規行為有顯著的影響因素(林豐 福、張開國、葉祖宏,2003),18 歲至 40 歲的年齡層青年有較高肇事及違規發生率, 大多數民眾普遍存有遵守交通規則是警察在旁邊才有的行為,甚至產生一種普遍的文 化,進而對遵守交通規則的他人造成影響。台灣社會文化往往因具人情味而較忽略法 治精神,常見的違規行為包括紅燈右轉和機車逆向騎車,以及劃有禁行機車道之機車 違規行駛。紅燈右轉非常容易造成與行人的衝突而肇事,也顯示國人對於行人地位的 不尊重,在建設現代人本交通新文化方面,「人」的方面素養的不足。不同文化環境產 生不同價值觀,價值也會形成文化 (文崇一,1989)。不同的價值影響著我們的行為。 隨著時代變遷,普遍性各種商業文化活動常常標榜著對脫軌行為的美化,彷彿遵 守秩序是一種懦弱的表現。過去的傳統文化正逐漸隨著經濟社會等環境的改變而不同, 以往對華人的研究認為:中國人不重視個人價值,而過分接受和重視權威,但 2002 年寇彧針對北京青少年的研究顯示個人價值取向發展趨勢是對接受權威愈來愈不重視, 對「個人主義」愈來愈重視(黃光國,2002)。益發顯出舊有價值的變革。用路價值觀 是個人經驗與文化背景影響下的產物,價值觀不僅受到個人性格的影響並且因文化差 異、經驗等有有所不同,而特有文化環境下將形成機車騎士特有的用路價值觀。而資 訊的發達、家庭型態和經濟體系的重大改變,以及物質主義與自我主義的風潮更影響 價值觀的轉變。 1987 年政府解嚴,社會運動盛行;大家樂及股市投機等盛行使得學者才開始重視 價值觀及工作價值觀的研究,過去價值觀的研究主要針對生活及對各種不同觀念的價 值進行研究,行為的價值觀研究主要針對工作方面,但有關使用交通工具的價值研究 並未加以探索,本研究即針對此課題加以進行研究探索。 價值觀的研究是相當具有族群性,不同的族群具有不同的價值,過去價值研究的 檢討,文化適用性問題及社會歷史脈絡的關心是不足的,過去西方價值研究開始時各 學者自不同的觀點進行,時至今日又未能有系統做有效整合,研究分歧現象未全然解 決,顯示價值研究還有很大一段路要走,而本土化價值研究也有極大努力改善空間(洪 瑞明及劉兆明,2003)。
2
1.2 研究目的
基於上述的研究動機,本研究的目的在於探索現代文化社會環境中,青年對影響騎 車用路行為所具有的價值觀,其影響違規行為意向上的量度,包括自我認知對違規行為 的態度影響違規行為意向的相關研究。本研究目的簡述如下: 一、探索機車騎士在騎車行為意向上所具有價值觀的評估構面。 二、分析用路價值觀與騎車態度上及行為意向上的影響程度及相關性。 三、初步建立機車騎士用路價值的量表。1.3 研究範圍
根據內政部警政署資料表1.1及表1.2,其中A1類係指造成當場或24小時死亡之事 故;A2類只造成人員受傷或超過24小時死亡之交通事故;在台灣,機車為肇事原因的比 率逐年上升,而且一直居於所有車種最大的分布比率。而且機車一直是國人主要的交通 工具之一,登記使用車輛數也遠大於其他車種。 表1.1 道路交通事故統計表 民國89年至99年道路交通事故 年 別 道路交通事故 肇事總 件數 肇事件數按肇事車種(件)(A1+A2類) 機車 肇事 比率 大貨 車 小貨車 大客 車 營業 小客 車 自用小 客車 特 種 車 腳踏車 其他 89 52,925 2,014 4,976 627 2,652 21,414 83 18,629 2,557 0.35 90 64,264 2,097 5,807 717 2,845 25,458 85 23,893 3,362 0.37 91 86,259 2,442 7,435 891 3,751 32,608 122 33,840 5,170 0.39 92 120,223 3,071 10,839 990 4,029 44,717 175 47,470 8,932 0.39 93 137,221 3,434 11,558 1,026 4,039 50,962 177 55,098 10,927 0.40 94 155,814 3,736 13,174 1,106 4,368 59,011 196 62,499 11,724 0.40 95 160,897 3,628 13,367 1,103 4,444 58,930 208 67,087 12,130 0.42 96 163,971 3,377 13,086 997 4,444 57,071 210 72,781 12,005 0.44 97 170,127 3,039 13,446 1,029 4,990 56,210 208 79,104 12,101 0.46 98 184,749 2,949 14,332 976 5,466 60,649 213 88,095 12,069 0.48 99 219,651 3,487 16,452 1,108 6,710 70,942 190 107,295 13,467 0.493 1.2 道路交通事故肇事故原因 民國89年至99年道路交通事故 合計 肇事件數按肇事原因(件)(A1+A2類) 汽(機、 慢)車駕 駛人 機件 行人(或 乘客) 交通管制 (設施) 其他 89 年 52952 52,129 186 548 40 49 90 年 64264 63,234 230 699 25 76 91 年 86259 84,419 295 1,326 38 181 92 年 120223 117,906 412 1,678 123 104 93 年 137221 134,383 446 2,036 140 216 94 年 155814 152,408 443 2,521 198 244 95 年 160897 157,428 490 2,571 182 226 96 年 163971 160,646 474 2,374 228 249 97 年 170127 166,728 561 2,380 186 272 98 年 184749 180,806 709 2,676 230 328 99年 219651 215,153 749 2,957 286 506 本研究問卷對象以有機車駕照者為對象。年齡、性別、就業與否為人口統計變數。 違規行為的種類大致可分為侵犯路權(機車行駛快車道、人行道,轉彎車不讓直行車, 逆向行車)、侵犯行為(遠燈直射前方或後方來車等),本研究以機車侵犯路權行為為研 究目標。包括未依規定紅燈直接右轉、機車行駛禁行機車道、逆向行車等。在過去交通 部道路交通安全督導委員會所做統計資料中顯示,機車肇事五大主因包含有違反號誌管 制或指揮、逆向行車等。以民國96年所作統計為例,A2類之前五名肇事原因,依序為「未 注意車前狀態」(1萬4,497件)、「未依規定讓車」(1萬3,884件)、「酒醉(後)駕駛失控」 (5,992件)、「違反號誌管制或指揮」(5,662件)及「未保持行車安全間距」(3,893件)。
1.4 研究流程
以下將針對本研究內容步驟及流程說明,流程示意圖如圖 1.1 所示,針對各階段 闡述如下: (1)界定研究課題及範圍;首先對研究課題的探討,產生本研究的動機;並對研究的範 圍假界定。 (2)相關文獻回顧 在界定研究課題及範圍後,針對價值觀及騎車違規意向相關內容的文獻 加以 探討及回顧。 (3)系統架構的建立,針對文獻回顧後所得到的有用資訊,針對影響行為意向的因子, 建立系統架構。4 (4) 模式建構,依據採用的系統架構,利用因子分析及結構方程模式方法,建構模式。 (5) 問卷設計與調查 依據模式的相關屬性變量,進行問卷設計,並進行初步問卷調查檢查問卷的 進行修改再做進一步問卷正式施測。 (6) 實證分析 依據不同假設,利用結構方程模式進行分析,以所獲得的機車駕駛人相關違規 意向特性資料後,以不同的價值觀進行驗證分析,探討駕駛人在違規意向與不同 價值的因果分析。 (7)結論與建議 針對分析結果,進行機車違規行為意向的探討與總結,並藉由不同價值觀與違 規意向的分析及不同族群分析下,機車駕駛人違規行為意向模式的建立,期望有 助於駕駛教育、安全宣導等。 圖 1.1 研究流程 相關文獻回顧 系統架構的建立 模式建構 問卷設計與調查 結論與建議 實證分析 界定研究課題及範圍
5
第二章 文獻回顧
本研究文獻回顧主要分為兩部分,第一部分為與價值觀相關的定義與對行為的影 響等文獻,第二部分為對理性行動理論與計畫行為理論對駕駛違規行為的研究的文獻 回顧,期藉此文憲的說明,更加確立研究方法。2.1 價值觀的定義
Rokeach(1973)將價值觀定義為「一種持久的信念,認為就個人或社會而言,某一特 定的行為模式或存在的終極狀態優於另一個相對的行為模式或狀態」。其將價值觀分成 兩大類,一類是與個體追求之目的有關的「目的性價值觀」(Terminal value),另一類是 與個人行為偏好模式有關的「工具性價值觀」(Instrumental value),即個人為了達成目 的性價值而偏好的手段或行為模式。表2.1顯示Rokeach價值調查(RVS)兩大類各18個項 目,括號內為該項目的敘述說明。 表2.1 Rokeach價值調查表 目的性價值觀 工具性價值觀 舒適的生活(富足的生活) 振奮的生活(刺激的、積極的生活) 成就感(持續的貢獻) 和平的世界(沒有戰爭和衝突) 美麗的世界(自然和藝術的美) 平等(兄弟情誼、機會均等) 家庭安全(照顧自己所愛的人) 自由(獨立自主的選擇) 幸福(滿足) 內在和諧(沒有內心衝突) 成熟的愛(性和精神上的親密) 國家安全(免遭攻擊) 快樂(快樂的、休閒的生活) 救世(救世的、永恆的生活) 自尊(自重) 社會承諾(受尊重、讚賞) 真摯的友誼(親密關係) 睿智(對生活有成熟的理解) 雄心勃勃(辛勤工作、奮發向上) 心胸開闊(開放) 能幹(有能力的、有效率) 歡樂(輕鬆愉快) 整潔(整齊、清潔) 勇敢(堅持自己的信念) 寬容(諒解他人) 樂於助人(為他人的福利工作) 正直(真摯、誠實) 富於想像(大膽、有創造性) 獨立(自力更生、自給自足) 智慧(有知識、善思考) 符合邏輯(一致的、理性的) 博愛的(溫情的、溫柔的) 服從的(有責任感、對人尊敬) 禮貌(有禮的、性情好) 負責(可靠的) 自我控制(自律的、約束的) Super(1980)則定義價值觀為「個人所追求的一種目標或心理狀態,也可以是一種 關係或物質的條件」。Hofstede(1984)認為,價值觀是「偏向喜歡某種狀態的廣泛傾向」。6 Schwartz(1992)則把價值觀定義成「令人嚮往的狀態、目標、目的或是行為,優於某些 特定的情形,且能當成基準水平來評斷和選擇不同的行為模式」。國內學者吳聰賢(1983) 指出,價值是一項具有偏好性質的認知或態度內容。文崇一(1989)認為價值觀是「一 個社會或一群人用以衡量事物或行為的標準」。鍾淑珍(1999)則認為:價值觀是一種抽 象的概念,具有認知、行為、情感等三個層面的意義,通常是藉由選擇、評價等行為表 現出來,也就是個人在評價事物時所依據的標準。 Kahle(1983)則提出的價值觀測量尺度的9個問項,分別是「自愛(Self-respect)」、「受 尊重(Being respected)」、「滿足自我 (Self-fulfillment)」、「歸屬感 (Sense of belonging)」、 「 刺激冒險(Excitement)」、「生活的趣味(Fun and enjoyment of life) 」、「溫暖的人際 關係(Warm relations with others)」、「成就感(Sense of Accomplishment)」、「安全感(Security)」 以理性行動理論為研究架構,並以計畫行為理論的感知行為控制為調節變量之一,上述 9個問項為潛在變數,探討其與交通違規行為意向之間的影響關係。 Schwartz(1992)則提出個體價值觀的基礎理論,他依據個體和社會都需處理的三種 一般性需求而衍生拓展出十個不同類型的價值觀。此三種一般性需求為:(1)需要其他 個體;(2)需要與社會互動協調一致;(3)需要能在團體中順利的運作與存活。這十種價 值觀為:(1)權力(Power),例如社會地位和聲望;(2)成就感(Achievement),例如成功 和企圖心;(3)快樂主意(Hedonism),例如快樂和開心的生活;(4)刺激(Stimulation), 例如興奮、有挑戰的生活;(5)自我引導(Self-direction),例如選擇自己的目標,有獨立 的想法;(6)普遍性(Universalism),例如心胸開闊,有社會正義感;(7)仁慈(Benevolence), 例如助人的或願意原諒別人的;(8)傳統(Tradition),例如謙遜的或願意承擔義務的;(9) 順從(Conformity),例如服從的或自我責備的;(10)安全性(Security),如安全感、社會 或人際關係的融洽與穩定。另外Schwartz(1992)又將十個價值觀組織成兩種構面,每構 面各有兩極。第一個構面的兩極為「對改變的開放度」(Openness to change),包含了快 樂主義、刺激及自我引導;以及「維持原樣」(Conservation),包括傳統、順從、以及 安全性。第二個構面的兩極分別為「自我超越」(Self-transcendence),包含了普遍性與 仁慈;以及「自我強化」(Self-enhancement),包含了權力、成就感以及快樂主義。 雖然各家學者對於價值觀的定義不一,但大部分都同意價值觀是一個標準或準則, 可被用來選擇目標或指引個體的行為,並且是相當穩定且持久的(Does, 1997)。
2.2 價值觀對行為的影響
過去許多研究指出價值觀對行為具有影響力。可以預期價值觀會影響一個人行為 的動機和偏好等。價值觀由社會文化環境所產生,並影響著社會文化,為社會大眾所 共有(Mehmet,Kjell,Conny,Jorund,2010)。Schwatz 及 Bilsky(1987)指出價值觀是一般人 要求的認知表現,包括生理需要、社會相互的要求和社會體制對個人的要求。 Rokeach(1973)對價值觀的定義是對現存的情形和行為的特定模式,秉持一種持續的信 念對現存正面或負面模式的情形和行為,個人或社會認為是較合適的;主張價值觀與7 態度有因果關係。 一般認為價值觀會影響態度並與社會文化相互關聯,如下圖 2.1。 價值觀 社會文化 態度 圖 2.1 價值觀與社會文化、態度相互關係 價值觀是一個社會或一群人用以衡量事務和行為的標準(文崇一,1989), Kluckhohn 認為價值是一種文化產物,Rescher 認為價值是一種理性行動的標幟。價值 觀是相對比較穩定的心理因素,在個人認知系統中,價值觀比態度佔有更中央的位置 (Kamakura amd Novak,1992) 。因此,Rokeach 及 Novak 提出了價值觀決定了態度, 也許在了解行為的動機上,價值觀比態度更為有效。Rokeach 在 1973 年提出了價值觀 調查,即知名的 RVS (Rokeach value suvey),其包括兩個部分,一部分為 18 個工具問項 (行為的理想模型),一部分為 18 個終端問項(理想的最後存在狀態)。其 RVS 的缺點為 對 36 個問項排序結合的困難、完成所有問項的時間、排序過程資訊的喪失、更重要的 是對日常生活相關性的缺乏。針對 RVS 的缺點,Kahle(1983)提出簡化的價值觀測量尺 度 LOV(list of Values),包括 9 個價值觀問項:溫暖的人際關係、自愛、成就感、生活 的快樂與享受、滿足自我、受尊重、安全感、歸屬感與刺激冒險。因為 LOV 使用上 和完成的容易性,成為目前研究價值觀的優越工具,特別是在非心理學家的使用上。 目 前價值觀的研究在工作、行銷、光觀等各方面有許多成果,但對交通行為的研究卻未 見於相關文獻。 在對價值觀的作用方面,價值觀對人類,個人和群體的行為有導向的作用,價值 的穩定或轉變就必然產生行為的穩定或轉變。
2.3 駕駛行為相關文獻
Ben-Ari(2003)開發出一個駕駛行為多面向的問卷,有關駕駛行為的因素分成 4 群組,(1)魯莽和粗心的駕駛形式(2)焦慮的駕駛形式(3)憤怒和不友善的駕駛形式(4) 耐心和小心的駕駛形式。8 駕駛行為的分類,依(Turker,2005)正向駕駛行為尺度量表,對負面駕駛行為的量 測基礎主要區分為兩項:(1)誤差(Error)(2)違反行為(Violation),這兩項被認為有不同 的心理成因。(Reason,1990)(1)誤差(Error)又分為疏忽(Slips)和誤失(Lapses)(因行動 的結果)、錯誤(Mistake)(意向的誤差),而誤失(Lapses)大部分是因為記憶錯誤的失誤, 疏忽(Slips)指的是專注的不足。本研究駕駛行為專注於違反行為,違反行為是指規則 性質的錯誤,與正常規則的誤用有密切的關聯或壞原則的誤用,或運用好規則的失敗, 或在無規則情形下錯誤規則的使用。
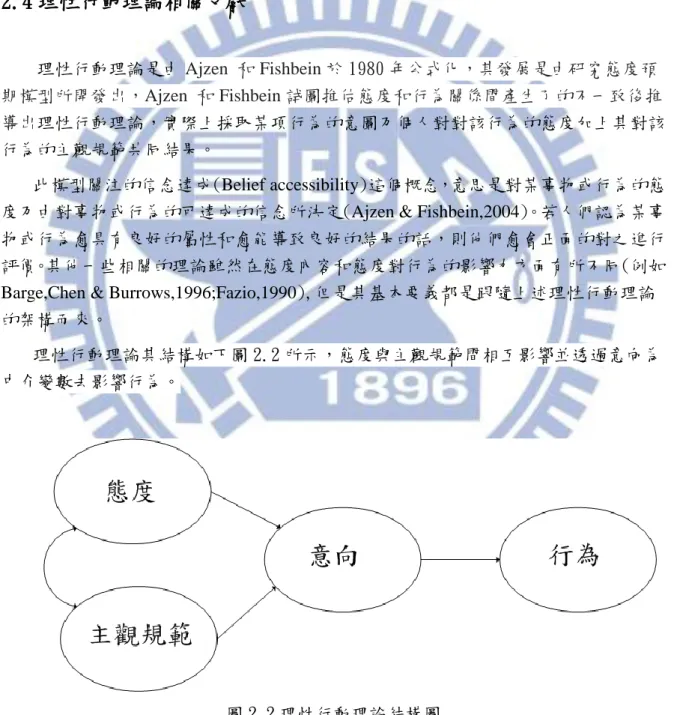
2.4 理性行動理論相關文獻
理性行動理論是由Ajzen 和 Fishbein 於 1980 年公式化,其發展是由研究態度預 期模型所開發出,Ajzen 和 Fishbein 試圖推估態度和行為關係間產生了的不一致後推 導出理性行動理論,實際上採取某項行為的意圖乃個人對對該行為的態度加上其對該 行為的主觀規範共同結果。 此模型關注的信念達成(Belief accessibility)這個概念,意思是對某事物或行為的態 度乃由對事物或行為的可達成的信念所決定(Ajzen & Fishbein,2004)。若人們認為某事 物或行為愈具有良好的屬性和愈能導致良好的結果的話,則他們愈會正面的對之進行 評價。其他一些相關的理論雖然在態度內容和態度對行為的影響力方面有所不同(例如 Barge,Chen & Burrows,1996;Fazio,1990),但是其基本要義都是跟隨上述理性行動理論 的架構而來。理性行動理論其結構如下圖 2.2 所示,態度與主觀規範間相互影響並透過意向為 中介變數去影響行為。
9
2.4.1 態度(Attitude)
Rokeach(1968)認為態度是對某對象、狀況所對應偏好方式的某種傾向,是信念、 假設、預期和價值(Belief,Assumption,Expectation and Value)的加總(Joakim Kulin and Stefan Svallfors,2011)。Fishbein & Ajzen(1975 )認為態度是對某特定行為正面的或 負面的的評價,個人對採取特定行為會帶來的影響所進行的評估。態度為對該特定行 為的所做贊同的評價或不贊同的評價(Icek Ajzen,2002)。 態度為一種對於某種行為喜歡或是不喜歡的感覺,態度是每一個行為的信念 (Behavioral belief)強度乘上可能結果的評估總和所決定,行為的信念可定義是關於 可能結果的和對於這些結果的評估價值(Icek Ajzen,2002)。行為信念具體的說,人們 知道做某件事情會造成某些結果 ,譬如說,我今天在公眾場合罵了任何人,我知道結 果可能會造成社會的反感,我們在每一個行為信念乘上一個加權的係數,該係數叫做 感知結果的有利條件,再把每一個乘出來的結果加起來就是所謂的態度。使用數學式 子如下:
A
Bb
ie
i(2.1)
A
B: (Attitude toward the behavior)對某一行為的態度b
i:(Behavioral belief strength)對某一行為信念的強度e
i (Outcome evaluation)對某一行為可能結果的評估 :正比於 表示A
B=cb
ie
i,b
ie
i乘積的加總越大則態度越大,c(constant)代表常數。 將公式做進一步推論:(2.2) ;B、E 是為常數,可調整 b 及 e 之評分。
2.4.2 主觀規範(Subjective norm)
所謂的主觀規範是指來自他人對於我是不是該做這個行為的意見,和我們是否要 順從這些期望的動機。主觀規範被定義為每一個規範的信念(Normative belief)的總10 和,規範的信念是指某些特定的人士們覺得某個人是不適合作某些行為,同樣的,我 們在每一個標準信念乘上一個加權的係數叫做去同意某些人意見的動力,最後把乘出 來的結果就是所謂的主觀規範,舉個例子,某個人的同事非常推薦他(她)去購買替 代能源車輛,假如他(她)對於他(她)同事印象良好的話,這個人就非常有可能去 購買替代能源車輛,規範信念產生了社會的壓力或主觀的規範(Icek Ajzen,2002)。 主觀規範的量測是比較具有命令性質的量測問項,而不僅僅是描述性質的量測問 項,例如身邊的人對自己某行為的贊成或不贊成為描述性質的量測問項,身邊的人對 自己某行為的評價為該做或不該做。通常主觀規範間變異較少,因為社會要求減少了 差異性。主觀規範是一種外在環境或團體對個人所期許的一種規範(Gerard J.Fogarty,Andrew Shaw,2010) 。
2.4.3 意向(Intension)
態度、主觀規範、感知行為控制組合成了行為意向,贊同的態度、主觀規範、感 知行為控制導致有愈強的行為意向,最後在對該行為實際控制的足夠程度,當機會出 現時預期會實行該行為(Fishbein & Ajzen,1975)。行為意圖即個人會採取特定行為 的可能性,意向因此是行為前一項直接的影響因素,然而許多行為因為受到意志的控 制限制造成實行的困難,感知的行為控制為除了意向外,其亦直接影響行為(Icek Ajzen,2002)。2.4.4 行為(Behavior)
行為被定義在包括四方面的要素,目標(Target)、行動(Action)、背景(Context)、 時間(Time),考慮一個例子,在未來一個月在轉彎路口紅燈直接右轉,紅燈為目標, 直接右轉為行動,轉彎路口為背景,未來一個月為時間,行為需有一致性。2.5 計畫行為理論
理性行動理論與自發性的行為(Voluntary Behavior )有很大的關係,如果行為發生 的潛在因素不是完全自發性及控制下,這個結果必須額外加入一項感知行為控制的潛 在因素,這個新的理論稱為計畫行為理論(TPB, Theory of Planed Behavio)。計畫行為理論(Theory of Planed Behavior,簡稱 TPB)是由 Ajzen(1985)所提出。該 理論是由 Fishbein & Ajzen 於 1975 年所提出的理性行為理論(Theory of Reasoned Action,簡稱 TRA)演變而來的,理性行為理論主要用來預測和瞭解人類的行為。根據 TRA 模型可知,個人表現出特定行為是受個人的行為意向(Behavioral Intention)影響,
11
而行為意向則是共同取決於個人對此行為的態度(Attitude)與主觀規範(Subjective Norm),同時研究指出態度與主觀規範之間也會互相產生影響。由於 TRA 假定個體對 於是否採行某一特定行為是出自於完全自願控制,其假設實行該行為有完全的意志控 制,其忽略了使用者個人特點及實行該行為的便利性與資源的控制能力。於是
Ajzen(1985)增添第三個元素:認知行為控制(Perceived behavioral control)。TPB 主要 以三個階段來分析行為模式的形成過程:行為決定於個人的行為意圖;行為意圖決定 於對行為的態度、行為主觀規範與認知行為控制等三者或其中部分的影響;對行為的 態度、行為主觀規範及認知行為控制受外生變數的影響。下圖為計畫行為理論結構圖: 圖 2.3 計畫行為理論結構圖 圖 2.3 其中感知行為控制對行為直接影響的虛線部分,表示感知行為控制未完全 透過中介變數(意向)去影響行為,意向為感知行為控制的部分中介變數。 基於理性行動理論在應用上對無法完全有意志的控制行為,無法做有效解釋的限制, 於是加入了感知行為控制作為行為的解釋,其指出當實行困難度為何時,人們願意去 實行該行為,為了實行該行為時,人們願意盡多少努力(Icek Ajzen,1991)。 所謂感知行為的控制就是指為了作這個行為所需要資源和機會(Resource and opportunity),同樣的,行為的控制是和每一個控制信念(Control belief)的總和有關, 控制信念是說某一個人對於現存會促進或阻礙的資源要素和對這些要素所感知的力量; 我們一個例子,想要上台演講,必須剛好有個可以演講的場合,和有人願意給你機會
作這個演講,然後一樣我們在乘上一個係數,叫做控制信念功率(Control belief power),
即是所謂方便性,就是指去拿到這些資源和機會的方便度,是很容易拿到手呢?還是 很困難,最後把乘出來的結果加在一起就是行為的控制。 感知行為控制也就是主觀的 認為自己在實行行為的難易程度。 過去研究一致顯示在道路交通安全上,感知行為控 制強烈且直接地影響著駕駛行為及意向方面。在有關酒駕的研究當中,對於酒駕具有 防止負面影響的有效認知可有效預測相對應的意向(Beck,1981)。
12
2.6 小結
由相關文獻回顧可知,態度、價值及感知行為控制是影響意向的重要因素,單由 行為觀察無法得知其內在心理構面,本研究透過心理探勘以了解其心理層面。心理 層面並不意確知而得,通常藉由問卷量測。對於實際行為的量測,在問卷的方面通 常使用意向來測量行為的傾向。過去許多文獻顯示在許多行為上,價值觀比態度在 行為的解釋上更具有決定性的影響因素,根據許多文獻探討,價值觀可視為理性行 動理論中態度的前項因素信念(Belief),在解釋違規行為方面,感知行為控制對於 違規的行為意向具有相當的影響。 價值觀決定了態度,態度是一個人對於行為的評價,也許在了解行為的動機上, 價值觀比態度更為有效。相關文獻對價值觀的定義指出,除了國內學者吳聰賢(1983) 將價值觀定義為一項具有偏好性質的認知或態度內容,將價值觀定義為態度的內容 外,價值觀與態度是兩種不一樣的心理因素,一般而言,價值觀的對象範圍是比較 廣泛的,在時間上價值觀比態度更不易形成與改變。 理性行為理論主要用來預測和瞭解人類的行為。根據理性行為理論模型可知, 個人表現出特定行為是受個人的行為意向(Behavioral Intention)影響,而行為意向則 是共同取決於個人對此行為的態度與主觀規範,同時研究指出態度與主觀規範之間 也會互相產生影響,而主觀規範與社會文化具有相當的關係,而文化正是價值觀形 成的背景因素。綜合以上所述,在行為的解釋上,態度、價值觀、感知行為控制具 有相當的影響相關。13
第三章 研究方法
3.1 研究架構
由於價值觀本身是抽象的、普遍性的概念,學者對於價值觀概念的看法並不一致, 對價值觀的定義與理論相當分歧,Rokeach(1973)致力於價值觀概念的整合,他認為價 值觀及態度兩者一起構成信念體系,並區分價值觀是超越具體對象或情境的一般性的信 念,而態度指針對具體對象或情境的許多信念的組織,而過去對工作價值觀的研究當中, 對於工作價值觀的後果變項,其中普遍被研究並得到支持的是工作態度相關變項。 Becker(1968)提出預期效用概念,以此理論基礎個人違法行為是基於理性的。 價值觀是個人或社群用以判斷事物或行為的一種標準,從價值判斷可以使人理解 什麼是合乎社會規範的正當行為,什麼又是違反社會規範的偏差行為。 價值與規範是一體的兩面,價值影響著態度,如應不應遵守交通規則,規範著重 於實際行為方面,如是不是遵守交通規則。對價值觀所作的概念研究,Rokeach(1968) 及 Kahle(1983)視價值觀為一種持久的信念。在行為不易量測或無法量測,大多以意 向代替行為之量測,本研究基於行動理論構建出價值、態度與意向的基本模型,並加 入計畫行為理論的感知行為控制為調節變量,價值觀為潛在變數,路徑量測模式如下 圖 3.1 圖 3.1 研究架構圖14
3.2 因子分析
因子分析是起源於20 世紀初期,心理學領域為了研究有關人類行為不可直接量測 的因素,所發展出來的多變量統計技術,將研究中眾多的變數萃取成較少的幾個變數, 而萃取之後的變數即稱為因子。剛開始主要應用於人類行為的研究,之後才逐漸擴及於 各個領域,如社會學、政治學、管理學等。研究者經常會去測量到一些抽象的概念,為 了要能測量出某一潛在特值的強度與內在結構,將具有共同特性或有特殊結構關係的測 量指標,抽離出背後潛在概念並進行因子關係的探究之統計分析技術,即是因子分析。 由於各問項間可能具有高度的相關性,若直接以得分高低作為選擇模式的解釋變數, 不但可能因問項間的共線性造成估計偏誤的情形外,也會受到選取的尺度不同而導致校 估結果不一致的情形。一般而言,若變數之間有高度的相關性,其極易形成共線性的問 題,所以在操作時變數的選擇,需要經由因子分析將眾多的變數縮減為少數的幾個因子, 以解決共線性問題。3.2.1 探索性因子分析
過去很多研究在進行因子分析之前,並未對於資料的因子結構有任何預期與立場, 而藉由統計數據來研判,此種因子分析帶有濃厚的嘗試錯誤的感覺,稱為探索性因子分 析。目前並未有對影響針對騎車駕駛行為的價值觀研究,因此決定採用探索性因素分析, 利用變數縮減的方式釐清變數間的關聯性,其數學式表示如下: x = F y + e, (3-1) 其中, x 為可直接觀測的變數向量, F 為指標變數與構面間相對應的因素負荷量矩陣,即要量測之潛在構面。 e 稱為獨特因素 (Unique factor)。 因素負荷量與獨特因素相當於迴歸分析中的已解釋變異與未解釋變異,表示潛在 構面解釋變數能力的強弱。3.2.2 探索性因子分析步驟
本研究將使用SPSS 軟體進行因子分析,其步驟如下說明: 1.相關矩陣的計算與運用15
因子分析的基礎是變項之間的相關。因此第一步是先計算各變數之間的兩兩 相關後,再詳細檢視該矩陣所代表的意義。第二步會計算此矩陣之取樣適切性量 數 (Kaiser-Meyer-Olkin measure of samplingadequacy, KMO),使統計量用於研究 變數之間的偏相關性,它比較的是各變數之間的簡單相關與偏相關的大小,取值 範圍在0~1 之間。此量數越大,表示越適合使用因子分析,因為各變數之間存在 內在關係,則由於計算偏相關時控制其他因素就會同時控制潛在變數,導致偏相 關係數遠遠小於簡單相關係數,此時KMO 值會接近1。如下表3.1 所示: 表3.1 KMO 統計量表 KMO 統計量 因子分析適合性 0.91 以上 極佳 (marvelous) 0.81 以上~0.9 以下 良好 (meritorious) 0.71 以上~0.8 以下 中等的 (middling) 0.61 以上~0.7 以下 普通的 (mediocre) 0.51 以上~0.6 以下 不佳的 (miserable) 0.5 以下 無法接受 (unacceptable) 2.因子的抽取 此一步驟的目的在決定從這些測量變數當中,存在著多少個潛在因素。除了人為設 定因子的個數外,還有許多可以決定因子個數的方法與指標,包括主成份分析法、主軸 因素法、最小平方法等,最常用的抽取方法是主成份分析法,主要歸因於較為單純的數 學轉換程序,以及容易理解與操作的特性。 3. 因子個數的決定 因子個數的決定主要依據的原則是特徵值的大小,特徵值代表某一因子可解釋的總 變異量,特徵值越大,代表該因子的解釋力越強。一般而言,特徵值需大於1,才可被 視為一個因子。 4. 因子轉軸 為方便因子的解釋,需利用因子轉軸。轉軸的目的,是在釐清因子與因子之間的關 係,以確立因子間最簡單的結構。轉軸一般使用直交轉軸,採用直交轉軸隱含著構面具 有獨立的特性,將因子之間進行最大的區隔。 5. 以SPSS 軟體進行構面的萃取與因素負荷量的估計。 6. 信度分析(Analysis of Reliability) 信度(Reliability)是指衡量工具的可靠程度,如正確性(Accuracy)或精確性 (Precision),其中包含了穩定性(Stability) 及一致性(Consistency)兩種含意。Cronbach’s α 係數是用來量測問卷內部的一致性,Cronbach’s α 係數愈大,表示量表內的內部一致 性愈高,倘α 值大於0.70 則顯示其信度相當高,一般認為至少大於0.6,介於0.70 與 0.35 間的信度為尚可,而如小於0.35 則表示信度低。本研究以特徵值大於1 之因子做
16 為選擇之標準。當因子數目決定後,就必須為因子命名,一般是依據因子中負荷量大的 變數來給予因子一適當的名字。
3.3 效度分析
效度表示一份問卷可以正確的量測出特質或屬性的程度,而針對問卷是否可以正確 反應出其所欲量測的構面,稱為「建構效度」(Construct Validity),構念效度分為兩種, 收斂效度與區別效度。收斂效度是指測量變項反應相對應的潛在構念的程度,而區別效 度是指由不同因素構念間所表示的心理特質的差異。3.4 結構方程模式
結構方程模式具有理論先驗性,其特性為因果模式必須建立在一定理論基礎上, 本研究理論基礎即為計畫行為理論。結構方程模式有二個基本模式:一為測量模式,一 為結構模式。測量模式為潛在變數與觀察變數組成,就數學定義而言,測量模式為觀 察變數對潛在變數的線性函數,在 SEM 分析模式中,一個潛在變數必須有 2 個以上 觀察變數來估計,稱為多元指標原則,其數學式及圖形如圖 3.4: AT1=
1+
1
1 AT2=
2 +
2
2 AT3=
3 +
3
3 AT4=
4 +
4
4 AT5=
5 +
5
5 圖 3.4 潛在變數測量圖結構模式亦稱為路徑分析,路徑分析法(Path Analysis)最早是由遺傳學者 Sewll Wright 於 1921 年所提出,主要是用來解釋基因之於人類的因果關係。1925 年 S ewll Wright 將路徑分析首次應用於經濟學上,用來分析玉米及毛豬的價格,之後亦 有人用於社會行為學科的研究。路徑分析主要在於分析變數間的因果關係(causal rela tionship),通常我們常以兩變數之相關係數來衡量其相關程度,但相關係數並無法說 明變數間的因果關係。結構方程模式其各項適配度指標如下表 3.2。 AT1 AT2 AT3 AT4 AT5
ξ
17 表3.2結構方程模式適配度指標表 統計檢定量 配適度標準
x
2 愈小愈好,其 p 值至少小於 0.05 卡方自由度比 小於 2 為良好 GFI 大於 0.9,為良好 RMSEA 0.05 以下優良,0.05~0.08 為良好 RMR 此值最好小於 0.05,小於 0.025 更佳 NFI 大於 0.9,為良好 AGFI 大於 0.9,為良好 CFI 大於 0.9,為良好18
第四章 資料收集與分析
4.1 調查計畫
本研究使用結構方程模式(SEM)分析,SEM 必適用大樣本分析,樣本數愈多,統 計分析的穩定性與各種指標的適用性也較佳。一般而言,受試樣本數最好在 200 以上。 Rigdon(2005)認為 SEM 模式分析,若樣本數在 150 以下,則模型估計是不穩定的, 觀察變數若超過 10 個以上,若樣本大小低於 200 時,代表模型參數估計是不穩定的, 且模式的統計考驗力(Power)會很低。學者 Schumacker 與 Lomax(1996)研究發現,大 部分 SEM 研究取樣的樣本數介於 200 至 500 之間(吳明隆,2009)。 本研究以台南市為研究目標,樣本大小設為 250 左右。根據交通部民國 99 年底統 計資料比較五都民眾日常使用載具情形可發現,台南市民眾日常騎乘機車比例 58.1%, 顯示近半數以上民眾使用機車作為交通工具(交通部統計處,2011)。因為台南市並沒有 捷運系統,再加上公車系統並不發達,機車為其主要交通工具。依內政部統計資料顯 示,2011 年 1 至 7 月,道路交通事故造成人員當場或 24 小時內死亡的人數與件數, 以高雄市居冠,台南市、台中市次之;但以人口比例而言,顯示台南地區有較高事故 發生率。為求提升本研究調查問卷的信度與效度,於正式實施問卷調查前,預計先發 放 100 份問卷對有騎車經驗者實施前測(Pilot Study)。4.2 問卷設計
行為需有一致性的原則,對於態度、價值觀、感知行為控制、意向必需和行為有 相同一致的成分。信念(Belief)被假設提供了態度、價值觀、感知行為控制的感知和情 感的基礎,信念基礎的量測是這些構造基礎的間接量測,信念基礎的量測提供一個潛 在構造的一個明顯的指標,可預期這兩種形式指標(直接和間接的指標)是相關的。根據 persons 的價值取向標準類型有三個:(1)認知的(cognitive),(2) 道德的(moral), (3) 評價的(appreciative),價值取向是為了獲得滿足動機的一種手段。行為的量測和態 度、價值觀、感知行為控制、意向應被確保較高內部一致性,理論上,信念基礎的量 測並不需有較高內部的一致性的要求,人們對於一個行為的態度是可以有負面情緒的, 如果他們認為該行為有可能產生正面和負面的結果。信念基礎的量測加總提供了這些 潛在構念的一個指標。內部的一致性是評估量測可靠性的一個方法,另一評估量測可 靠性的方法為時間穩定性(Temporal stability),這準則可應用在直接的量測和信念基礎 的量測。如果理論結構量測的基礎缺乏時間穩定性,他們無法預測要預測的行為。
19
4.2.1 機車違規行為的量測種類
依據台灣機車分類: 輕型機車:50C.C.以下,不可行駛高速公路,車牌為綠底白 字,普通重型機車:50C.C.以上、250C.C.以下,不可行駛高速公路,車牌為白底黑字, 大型重型機車:250C.C.以上;本研究騎機車的行為,所稱機車包括輕型機車(50c.c 以下)、普通重型機車牌(250c.c 以下),不包括大型重型機車。所針對違規行為有紅 燈直接右轉、機車行駛禁行機車道、逆向行車等常見侵犯路權違規行為。4.2.2 意向的量測
針對違規行為使用 6 個選項對意向加以量測,意向為行為的前項,針對不同的行 為及不同的母體必須以不同的項目被使用(Icek Ajzen,2002)。『非常同意~非常不同 意』五等級尺度為回答選項。對於意向指標問項量測如表 4.2。4.2.3 感知行為控制的量測
感知行為控制的量測必須獲取反應者對實行該行為的信心,是實行該行為的難度 或實行該行為的可能性,這類題目稱之為預期實行該行為自我有效性的辨別;其包括 行為信念的強度及對結果的評價。反應者對該行為的控制能力亦為感知行為控制的問 項內容。 感知行為控制分為兩個部分:控制信念和感知力,控制信念為可能阻止實行的內部 及外在因素,為自我效力衡量,關於實行該行為個人的能力或評價,感知能力(Perceived power)為促進該行為或阻礙該行為的所反應出的要素(Garard J.Fogarty,Andrew Shaw,2010)。針對機車騎乘行為有關感知行為控制之問卷內容設計如表 4.1。 表4.1 感知行為控制構面問卷項目 變數名稱 變數說明 CN1 我有能力掌握機車行駛禁行機車道的可能情形。 CN2 我認為逆向騎車非常容易。 CN3 我有信心掌握騎車闖紅燈的可能情況。 CN4 我有能力掌握逆向騎車的可能情況。 CN5 我可以掌握不依「機車兩段式左轉」規定直接左轉的情況。20 表4.2 意向構面問卷項目 針對騎車所遇到的各種情形,請依照您對各敘述句的同意程 度,在最適當的方格內作勾選: 高<- 認同程度 ->低 非 常 同 意 同 意 沒 意 見 不 同 意 非 常 不 同 意 1.當前方塞車且對向車流不大時,我將會騎車跨越雙線逆向行車 超越他車。 2 在交叉路口附近,我將會逆向騎車一小段距離,以方便到達目的 地(如下圖一)。 (圖一) 一 3.遇到前方車輛慢行時,我會行駛「禁行機車道」超車(如下圖 二)。 (圖二) 4. 當附近沒有警察時,我很可能會在「機車需兩段式左轉」的路 口上直接左轉。 5.在交叉路口上停等紅燈,且綠燈方向未見有來車時,我將會提 前起步闖紅燈。 6.為方便到達目的地,我會逆向騎車直接左轉(如圖三)。 (圖三)
21
4.2.4 態度的量測
任何標準態度尺度的量測產生能被使用在獲得反應者對行為的評價,因為結構的 方便性,這不同的詞意表達是最常被使用的。在最後具有內部一致性的測量尺標的集 合是被選擇為對態度的測量上。問項評價應包含兩部分,一個部分構成要素是本質上 有幫助的評價項目(有價值的和沒有價值的)、(有益的和有害的)、第二部分構成要素 是較具經驗性質的反應,例如快樂的和不快樂的、愉悅的和不舒服的,在建議上,除 這 2 種問項評價外,還應有好或不好的選項,傾向獲得較好的評價。必須注意的是, 兩種不同極端反應在同一客體身上所造成的抵銷平衡效果(Icek Ajzen,2002)。其所用 行容詞問項並包括安全的、可接受的。 態度操作型定義是對某行為所對應的評價,包括正面的、負面的、快樂或不快樂、 喜歡或不喜歡的評價。態度是基於價值對某種情形、行為所傾向的心理評價,價值是 個人人格的主要成分,一般而言態度由價值發展而來(張華葆,1994)。通常態度有一 特定的對象,但價值則以一類是物為對象,舉例而言;擁有較高自我尊重及安全價值 用路價值的人,對於逆向騎車應該會有負面的評價;其中用路價值指在所有騎車行為 的價值觀,其目標指所有騎車行為,所推衍出態度包括對逆向騎車、超速、超車、選 擇路線等的態度;針對態度構面量測所使用之問卷項目為表 4.3。問項為針對違規行 為使用 5 個選項對態度加以量測,以『非常同意~非常不同意』五等級尺度為回答選項 表4.3態度構面問卷項目 變數名稱 變數說明 AT1 逆向行車會幫助我節省時間。 AT2 騎機車行駛在禁行機車道會使騎車過程更順暢。 AT3 有時候騎機車逆向行車是有必要的。 AT4 騎機車在禁行機車道會讓我覺得愉快。 AT5 我可以掌握不依「機車兩段式左轉」規定直接左轉的情況。 AT6 機車跨越雙黃線是安全的。 AT7 我覺得騎機車闖紅燈是一件輕鬆的行為。 AT8 騎機車闖紅燈會鞤助我節省時間。4.2.5 價值觀的量測
綜合價值觀文獻回顧內容,用路價值可視之為一種穩定且持久之基本信念,是一個 人對特定騎車行為的持久性偏好或評判標準,進而因引導個體行為。本研究對機車騎士 的用路價值定義為「個人用以判斷騎車行為的標準與個人特定騎車行為模式的偏好」。 其定義相當接近前述Rokeach(1973)的與個體追求之目的有關的「目的性價值觀」。 過去工作價值觀的研究取向的分類,依據洪瑞彬及劉兆明(2003)的分類為四類:(一)22 與職業行為相關的工作價值(二)關注於工作行為的價值(三)工作的意義與重要性(四) 企業倫理價值系統。本研究對於機車騎士用路價值的研究取向為關注於騎車行為的相關 價值。Ravlian與Meglino(1987)對工作行為的價值觀區分為「偏好行為」及「工作成果 之重要性」等,近似本研究對騎車行為價值的定義,皆屬於較接近Rokeach(1973)的與 個體追求之目的有關的「工具性價值觀」。 工作價值觀的前置變項普遍以個人背景為主要,價值觀的研究與文化有相當大的關 係,過去價值觀的研究被認為缺乏對不同文化的關心。對價值觀所作的概念研究, Rokeach(1968)及Kahle(1983)視價值觀為一種持久的信念。本研究參考Sharon E. Beatty, Lynn R. Kahle,Pamela Homer,Shekhar Misra (1985)等人關於LOV問卷選項調查消費者行 為及Bearden(1999)書中所介紹的多項目價值觀量測(MILOV)生活價值量表為衡量工具, 作為部分參考。經與2位對交通行為有研究之專家及6位有研究所背景同儕討論,以先行 性探測問卷(附錄一)針對騎車行為價值加以量測,對台南地區監理站、文化中心、圖書 館、便利商店等及各機車停車場進行抽樣取得問卷有效樣本共102份,扣除無駕照者6份, 共96份,所得資料如下表4.4所示。 表4.4先行性探測問卷受訪者結構分析 類別 內容 人數 百分比 性別 男 45 46.8% 女 51 53.2% 年齡 18~25 歲 15 18.8% 26~35 歲 42 43.8% 超過 35 歲 39 37.4% 價值觀 安全 60 62.5% 愉快 37 44.8% 和諧的社會 29 37.5% 舒適感 24 29.2% 自我風格的實現 20 13.5% 自我尊重 11 12.5% 秩序的遵守 9 9.4% 此研究在價值觀衡量的操作型定義為「個人用以判斷騎車行為的標準與個人特定 騎車行為模式的偏好。」,針對上述 7 個價值觀並參考可能價值觀因素以價值觀操作型 定義設計 26 個問項加以量測。價值觀問卷用探索性因子分析,萃取出低維度因子,作 為價值觀的觀察變項再做分析。表 4.5 所列價值觀項目如下所示:
23 表4.5 價值觀構面問卷項目 變數名稱 變數說明 VA1 我常常會注意自己騎車所表現的形象。 VA2 我喜歡騎車在禁行機車道時的快感。 VA3 我會盡量避免按鳴喇叭。 VA4 即使沒有太多車和警察,我也不會逆向騎車。 VA5 騎車在禁行機車道會給我很大壓力。 VA6 我不會做違規的騎車行為。 VA7 騎車守規矩是一種自我尊重的表現。 VA8 騎車行駛禁行機車道太危險,所以我不會做。 VA9 騎車最重要的是要騎得開心。 VA10 即使會多花一點時間,騎車的安全性還是比較重要的。 VA11 騎車是一種享樂的行為。 VA12 我常常會檢查我機車的性能是否良好。 VA13 我會避免在颱風時間騎車外出。 VA14 即使要多騎乘一段路,我會選擇較順暢的路線騎乘。 VA15 當我後座有載人時,我會更加小心。 VA16 騎車遵守交通規則是國民應盡責任。 VA17 騎車是一種休閒活動。 VA18 我重視騎車舒適的感覺。 VA19 騎車時,我避免與人發生爭執。 VA20 我認為遵守交通規則才會被其他人尊重。 VA21 我願意多花一些錢,買騎起來較舒適的機車。 VA22 我會遵守交通警察對我的指揮。 VA23 我喜歡表現與眾不同騎車方式吸引別人注意。 VA24 騎車可以表現出我的性格。 VA25 騎機車會帶給我刺激的感覺。 VA26 我喜歡各種騎車挑戰技巧。
4.3 問卷初測樣本結構分析
本研究針對台灣地區台南市機車駕駛人,於民國 101 年 4 月 25 日至 5 月 1 日一周 時間進行問卷的發放,問卷初測地點為台南監理站、文化中心、圖書館、便利商店等 及各機車停車場進行抽取,總計回收問卷 125 份,扣除問卷內容部分遺漏的樣本,有 效樣本共計 116 份,站回收問卷共 92.8%,以下將這 116 份問卷進行分析。其樣本男 女比例大致相等,年齡在 18~40 歲者在 77%,詳細資料如表 4.6。24 表4.6 問卷樣本結構分析 類別 內容 人 數 百分比 類別 內容 人 數 百分比 性別 男 56 48.3% 平均每 月所得 無 14 12.1% 女 60 51.7% 未滿 2 萬 40 34.5% 年齡 18~22 17 14.7% 2~4 萬 57 49.1% 23~28 34 29.3% 4~8 萬 5 4.3% 29~35 25 21.6% 超過 8 萬元 0 0% 36~40 13 11.2% 每月平 均騎車 里程 30 公里以下 29 25% 超過 40 歲 27 23.2% 31~100 公里 58 50% 擁有 機車 駕照 期間 未滿一年 13 11.2% 101~200 公里 14 12.1% 1~5 年 33 28.4% 超過 200 公里 15 12.9% 6~10 年 24 20.7% 完成最 高學歷 國中(含)以 下 15 12.9% 超過 10 年 46 39.7% 高中(職) 48 41.4% 擁有 機車 種類 無 5 4.3% 大學(專) 48 41.4% 輕型機車 17 14.7% 研究所(含) 以上 5 4.3% 普通重型機車 95 81.9% 居住地 區 台南市 113 97.4% 大型重型機車 1 0.9% 其他 3 2.6% 同時擁有輕型 機車及普通重 型機車 1 0.9% 過去 10 年內發 生機車 事故經 驗 無 63 54.3% 1~3 次 45 38.8% 4~6 次 7 6% 同時擁有輕型 機車及普通重 型機車及大型 重型機車 1 0.9% 7~10 次 1 0.9% 超過 10 次 0 0% 過去 10 年內因 機車違 規被取 締經驗 無 60 51.8% 1~3 次 44 37.9% 機車 考照 前是 否需 要提 供「教 學指 導」 不需要 29 25% 4~7 次 8 6.9% 有需要「 61 57.8% 8~10 次 2 1.7% 非常需要 20 17.2% 超過 10 次 2 1.7% 利用 SPSS18.0 進行樣本的信度分析,所採用指標為Cronbach’s α 係數,從表 4.7 可看出態度、意向、感知行為控制各項目Cronbach’s α 係數皆大於 0.8,價值構面亦
25 接近 0.8,表示信度效果佳。 表4.7 問卷各構面試題信度分析 構面 題數 Cronbach’s α 係數 價值 26 0.796 態度 8 0.887 感知行為控制 5 0.910 意向 6 0.877
4.3.1 態度構面因素分析
態度構面 KMO 值為 0.839,Bartlett 球型檢定亦達到統計上顯著水準(P 值〈0.01), 可知適合進行因素分析,由表 4.8 所有項目標準化後因素負荷量皆未小於 0.4,該構 面效度在可接受範圍內,故並不刪除題目。 表4.8 態度構面因素負荷量 問項 因素負荷量 1.逆向行車會幫助我節省時間。 0.557 2.騎機車在禁行機車道會使騎車過程更順暢。 0.502 3.有時候騎機車逆向行車是有必要的。 0.548 4.騎機車在禁行機車道會讓我覺得愉快。 0.580 5.我可以接受不依「機車兩段式左轉」規定直接左轉的行為。 0.580 6.機車跨越雙黃線是安全的。 0.434 7.我覺得騎機車闖紅燈是一件輕鬆的行為。 0.672 8.騎機車闖紅燈會鞤助我節省時間。 0.659
4.3.2 感知行為控制構面因素分析
感知行為控制構面 KMO 值為 0.86,Bartlett 球型檢定亦達到統計上顯著水準 (P 值〈0.01),可知適合進行因素分析,所有項目標準化後因素負荷量皆未小於 0.4, 該構面效度在可接受範圍內,故並不刪除題目。各個題項在感知行為控制構面之因素 負荷量如表 4.9。26 表4.9 感知行為控制構面因素負荷量 問項 因素負荷量 1.我有能力掌握機車行駛禁行機車道的可能情形。 0.534 2.我認為逆向騎車非常容易。 0.663 3.我有信心掌握騎車闖紅燈的可能情況。 0.770 4.我有能力掌握逆向騎車的可能情況。 0.883 5.我可以掌握不依「機車兩段式左轉」規定直接左轉的情況。 0.858
4.3.3 意向構面因素分析
意向構面 KMO 值為 0.86,Bartlett 球型檢定亦達到統計上顯著水準(P 值〈0.01), 可知適合進行因素分析,因素負荷表列於表 4.10,所有項目標準化後因素負荷量皆未 小於 0.4,該構面效度在可接受範圍內,故並不刪除題目。 表4.10 意向構面因素負荷量 問項 因素負荷量 1.當前方塞車且對向車流不大時,我將會騎車跨越雙線逆向行車超越他 車。 0.631 2.在交叉路口附近,我將會逆向騎車一小段距離,以方便到達目的地。 0.531 3.遇到前方車輛慢行時,我會行駛「禁行機車道」超車。 0.559 4.當附近沒有警察時,我很可能會在「機車需兩段式左轉」的路口上直 接左轉。 0.699 5.在交叉路口上停等紅燈,且綠燈方向未見有來車時,我將會提前起步 闖紅燈。 0.621 6.為方便到達目的地,我會逆向騎車直接左轉。 0.7034.3.4 價值構面因素分析
用路價值量表為第一次使用,共使用 26 題進行分析,用以萃取出可用因素構面, 使用相關矩陣及最大變異轉軸法進行探索性因素分析,KMO 值為 0.735,Bartlett 球 型檢定亦達到統計上顯著水準(P 值〈0.01),因素負荷表如表 4.11 所示,方形框框處 為因素負荷量大於 0.4,橢圓形為小於 0.4 但大於 0.3,萃取出特徴值大於 1 的因素共 有 7 個,累積解釋變量達 68.851%:
27 表4.11 轉軸後的因素負荷矩陣 元件 1 2 3 4 5 6 7 v1 .190 -.019 -.202 .050 .134 .194 .745 v2 -.241 .274 -.045 .023 -.060 -.154 .427 v3 .293 -.144 -.028 .062 .637 -.324 -.099 v4 .121 -.041 -.033 .065 .759 .436 -.121 v5 .171 .034 .167 -.051 .803 .003 .138 v6 -.017 .057 .607 .035 .130 .582 .089 v7 .435 -.018 .667 .046 .006 .336 -.008 v8 .157 -.050 .814 .136 .121 .014 -.050 v9 -.199 .107 .341 .309 -.354 -.126 .565 v10 .397 -.161 .698 .026 -.078 .033 -.155 v11 -.099 .171 .241 .766 -.037 -.044 .265 v12 .270 .034 .172 .173 .000 .807 .011 v13 .756 -.079 .040 -.135 -.017 .028 .093 v14 .774 -.051 .014 -.016 .110 -.005 -.006 v15 .802 -.153 .188 .089 .222 .074 .054 v16 .681 -.054 .243 .043 .211 .137 .078 v17 .108 .182 -.009 .876 .040 .139 -.043 v18 .453 -.003 .046 .612 .028 .137 .027 v19 .773 -.014 .071 .200 .176 -.038 -.105 v20 .714 -.054 .249 .118 .035 .293 -.014 v21 .551 .162 -.036 .317 .030 .279 -.194 v22 .714 -.044 .155 .058 .092 .013 -.156 v23 -.234 .810 .077 .041 .015 -.011 -.037 v24 .157 .783 -.015 .225 -.003 .081 -.046 v25 .065 .892 -.099 .104 -.003 .023 .194 v26 -.232 .809 -.115 .005 -.125 -.008 .086 萃取方法:主成分分析 經由初步分析結果,針對題目在因素 1 負荷量較大者之共同因素,因素 1 為安全 構面,因素 2 為自我風格的實現,因素 3 為自我尊重、因素 4 為愉快、因素 5 為和諧 的社會、因素 6 不明、因素 7 為滿足自我。第 12 個項目為「我常常會檢查我機車的性 能是否良好」在因素 6 的因素負荷量為 0.807,因無法檢測出因素 6 之性質,故予以刪 除,第 15 個項目為「當我後座有載人時,我會更加小心。」在因素 1安全構面的因素負 荷量為 0.802,然依其題意「當我後座有載人時」其關於責任因素易與「我會更加小心」
28 安全因素混淆,故予以刪除,第 20 個項目為「我認為遵守交通規則才會被其他人尊重」在 因素 1安全構面的因素負荷量雖為 0.714,然依其題意放在安全構面顯並不適當,故予 以刪除,第 21 個項目為「我願意多花一些錢,買騎起來較舒適的機車」在因素 1安全構面 的因素負荷量為 0.551 且在因素 4 愉快構面為 0.317,依其題意放在安全構面顯並不 適當,故予以刪除,第 16 個項目為「騎車遵守交通規則是國民應盡責任」在因素 1安全構 面的因素負荷量為 0.681,但依其題意放在安全構面顯並不適當,故予以刪除,故分析 之後總計刪除 12、15、16、20、21 題後再做因素分析。 第二次共使用 21 題進行分析,使用相關矩陣及最大變異轉軸法進行探索性因素分 析,KMO 值為 0.726,Bartlett 球型檢定亦達到統計上顯著水準(P 值〈0.01),萃取出 特徴值大於 1 的因素共有 6 個,累積解釋變量達 67.359%,經由選取各題項最大因素 負荷量得到安全、自我風格的實現、自我尊重、愉快、和諧的社會、滿足自我等 6 個 因素,將各項目標準化後因素負荷量加以整理,表 4.13 為各因素構面所對應項目之因 素負荷表。除了第 3 題「騎車時,我會盡量避免按鳴喇叭。」在和諧的社會價值觀因素 構面的因素負荷量為 0.566,及第 2 題「我喜歡騎車在禁行機車道時的快感。」、第 9 題 「騎車最重要的是要騎得開心。」在滿足自我價值觀因素構面的因素負荷量分別為 0.502 及 0.409 外,其餘各題項所對應因素的因素負荷量皆大於 0.6,效度中度良好。第 3 題及第 2 題標準化後因素負荷量亦皆大於 0.5,效度為可接受範圍。第 9 題在滿足自 我構面標準化後因素負荷量大於 0.4,效度亦為尚可接受。針對所探索出的因素構面 Cronbach’s α 係數進行樣本的信度分析如表 4.12。 表4.12 價值觀各構面試題信度分析 構面 題數 Cronbach’s α 係數 價值觀 21 0.710 安全 4 0.815 自我風格的實現 4 0.859 自我尊重 4 0.800 愉快 3 0.730 和諧的社會 3 0.663 滿足自我 3 0.341 除因素 6「滿足自我」及因素 5「和諧的社會」外,其餘Cronbach’s α 係數皆大 於 0.7,具有極佳的內部一致性,因素 5「和諧的社會」Cronbach’s α 係數大於 0.6 亦在信度可接受範圍內,但因素 6「滿足自我」Cronbach’s α 值 0.341,信度不在可接 受範圍內,正式問卷抽樣完成後再進行分析,再做決定是否刪除此構面。
29 表4.13 價值觀各題項因素構面表 因素構面 問項 因素負荷量 因素1:安全 13.我會避免在颱風時間騎車外出。 0.784 14.即使要多騎乘一段路,我會選擇較順暢的路線騎乘。 0.793 19.騎車時,我會避免與人發生爭執。 0.764 22.我會遵守交通警察對我的指揮。 0.699 因素2:自我 風格的實現 23.我喜歡表現與眾不同騎車方式以吸引別人注意。 0.811 24.騎車可以表現出我的性格。 0.783 25.騎機車會帶給我刺激的感覺。 0.884 26.我喜歡各種騎車的挑戰技巧。 0.815 因素3:自我 尊重 6.我不會做違規的騎車行為。 0.784 7.騎車守規矩是一種自我尊重的表現。 0.763 8.我不會做具有危險性的騎車動作。 0.806 10.即使會多花一點時間,騎車的安全性還是比較重要。 的。 0.674 因素4: 愉 快 11.騎車是一種享樂的行為。 0.766 17.騎車是一種休閒活動。 0.876 18.我重視騎車舒適的感覺。 0.612 因素5:和諧 的社會 3.騎車時,我會盡量避免按鳴喇叭。 0.566 4.即使沒有太多車和警察,我也不會逆向騎車。 0.842 5.騎車在禁行機車道會給我很大壓力。 0.763 因素6:滿足 自我 1.我常常會注意自己騎車所表現的形象。 0.784 2.我喜歡騎車在禁行機車道時的快感。 0.502 9.騎車最重要的是要騎得開心。 0.409